
状態判定装置、状態判定方法、及び状態判定プログラム
【課題】移動体の状態を精度良く判定することである。
【解決手段】状態判定装置103は、記憶部123と推定部133と判定部143とを備えた。記憶部123には、環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とが対応付けて記憶される。推定部133は、移動物について複数の検知情報が順に出力された場合に、記憶部123に記憶された状態遷移確率及び出力確率を用いて、移動物が到達した状態を推定する。判定部143は、推定部133により推定された状態に基づき、移動物の通過を判定する。
【解決手段】状態判定装置103は、記憶部123と推定部133と判定部143とを備えた。記憶部123には、環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とが対応付けて記憶される。推定部133は、移動物について複数の検知情報が順に出力された場合に、記憶部123に記憶された状態遷移確率及び出力確率を用いて、移動物が到達した状態を推定する。判定部143は、推定部133により推定された状態に基づき、移動物の通過を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、状態判定装置、状態判定方法、及び状態判定プログラムに関する。
【背景技術】
【0002】
近年、人や物の位置を検知する技術として、RTLS(Real Time Location System)が普及しつつある。RTLSは、RFID(Radio Frequency IDentification)やGPS(Global Positioning System)の技術を利用して、リアルタイムに対象物の所在を把握するシステムである。RTLSには、「移動体がどの部屋に居る(在る)か」がわかるもの、あるいは「移動体がどの場所を通過したか」がわかるもの等、様々な方式のものがある。
【0003】
RTLSに関する技術としては、例えば、人体から放出される赤外線を検知する赤外線センサを店舗の出入り口に設置し、検知された情報を用いて、顧客の入店退店を判別する店舗管理システムが知られている。また、RFIDを用いて、物の所在を把握する技術も知られている。この技術では、RFIDタグを移動体に貼付するとともに、環境側にタグ読取装置を設置し、RFIDタグがタグ読取装置の前を通過したか否かを判別することで、移動体の所在を把握する。更に、環境側に質問器を設置するとともに、人等の移動体に応答器を持たせ、応答器が質問器に反応したか否かに基づき、移動体を検出する移動体検出方式が知られている。また、ドア等の人が通過する場所に赤外線通信の受信装置を複数設置するとともに、赤外線通信の送信機を人に携行させ、人がドアを通過した際、受信機が複数のID情報を受信する技術が知られている。この技術では、それら複数のID情報の受信時刻から人の行動態様(歩行や走行)が識別される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−133583号公報
【特許文献2】特開2009−7157号公報
【特許文献3】特開2006−260254号公報
【特許文献4】特開平8−194011号公報
【特許文献5】特開2007−52474号公報
【特許文献6】国際公開第2007/058302号
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した技術では、RFIDや赤外線通信により、受信機が送信機から情報を受信する。すなわち、上述の技術は、受信機をセンサとして利用することで、検知対象の移動を捉える。しかしながら、センサには、センサ自体の特性あるいは環境要因により、誤動作が発生する場合がある。
【0006】
例えば、RFIDを利用する場合、タグ読取装置のアンテナの指向性や電波の到達距離によって、検知エリアが決定される。このため、検知エリア内にタグが在るにも拘らず、タグを検知しなかったり(未検知)、反対に、検知エリア内にタグが無いにも拘らず、タグを検知してしまったり(誤検知)することがある。検知しない例としては、環境側に設置されたタグ読取装置のアンテナの向きに対して、移動体の有するタグが直角の状態にあるため、タグが読み取り難くなる場合がある。一方、誤って検知してしまう例としては、タグからの信号が、環境中にある何らかの物体に反射することで、本来検出すべき読取装置とは異なる別のタグ読取装置がこの信号を検知してしまう場合がある。
【0007】
開示の技術は、上記に鑑みてなされたものであって、移動体の状態を精度良く判定することのできる状態判定装置、状態判定方法、及び状態判定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、本願の開示する状態判定装置は、一つの態様において、記憶部と推定部と判定部とを備えた。前記記憶部は、環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とを対応付けて記憶する。前記推定部は、前記移動物について複数の検知情報が順に出力された場合に、前記記憶部に記憶された状態遷移確率及び出力確率を用いて、前記移動物が到達した状態を推定する。前記判定部は、前記推定部により推定された状態に基づき、前記移動物の通過を判定する。
【発明の効果】
【0009】
本願の開示する状態判定装置の一つの態様によれば、移動体の状態を精度良く判定することができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、実施例1における状態判定の概要を説明するための図である。
【図2】図2は、実施例1における状態判定ユニットの機能的構成を示す図である。
【図3】図3は、タグの状態を説明するための状態遷移図である。
【図4】図4は、実施例1における推定部の動作を示すフローチャートである。
【図5】図5は、実施例1における通過判定処理を説明するためのフローチャートである。
【図6】図6は、実施例1における引返し判定処理を説明するためのフローチャートである。
【図7】図7は、実施例1における引返し判定処理におけるサブルーチン1を説明するためのフローチャートである。
【図8】図8は、実施例1における引返し判定処理におけるサブルーチン2を説明するためのフローチャートである。
【図9】図9は、実施例1における停滞判定処理を説明するためのフローチャートである。
【図10】図10は、実施例1における停滞判定処理におけるサブルーチン3の前半部分を説明するためのフローチャートである。
【図11】図11は、実施例1における停滞判定処理におけるサブルーチン3の後半部分を説明するためのフローチャートである。
【図12】図12は、実施例1における停滞判定処理におけるサブルーチン3のサブルーチンAを説明するためのフローチャートである。
【図13】図13は、実施例1における停滞判定処理におけるサブルーチン4の前半部分を説明するためのフローチャートである。
【図14】図14は、実施例1における停滞判定処理におけるサブルーチン4の後半部分を説明するためのフローチャートである。
【図15】図15は、実施例1における停滞判定処理におけるサブルーチン4のサブルーチンBを説明するためのフローチャートである。
【図16】図16は、実施例1において適用される確率オートマトンを説明するための図である。
【図17】図17は、実施例1において適用される確率オートマトンの具体例を示す図である。
【図18】図18は、実施例2における状態判定ユニットの機能的構成を示す図である。
【図19】図19は、実施例1及び2における状態判定ユニットを有する状態判定システムの構成例を示す図である。
【図20】図20は、状態判定システムにおいて、位置管理サーバの有する状態遷移図の一例である。
【図21】図21は、状態判定システムにおいて、複数の状態判定ユニットが設置された環境の地図の一例である。
【図22】図22は、状態判定プログラムを実行するコンピュータを示す図である。
【発明を実施するための形態】
【0011】
以下に、本願の開示する状態判定装置、状態判定方法、及び状態判定プログラムの実施例を、図面を参照しながら詳細に説明する。なお、以下の実施例により本願の開示する状態判定装置及び状態判定方法が限定されるものではない。
【実施例1】
【0012】
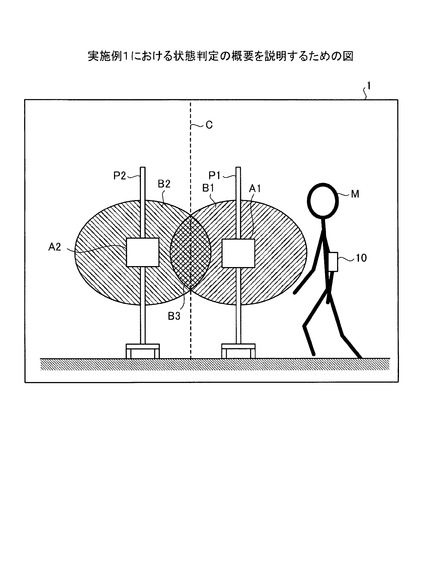
以下、本願の開示する状態判定装置の実施例について、図面を参照しながら説明する。以下では、本願の開示する状態判定装置をRFIDにより実現する例について説明する。図1は、実施例1における状態判定の概要を説明するための図である。環境1には、アンテナ固定用のポールP1が設置されている。ポールP1は、タグ読取装置のアンテナA1を所定位置に備える。アンテナA1は、検知エリアB1におけるタグ読取りを可能とする。同様に、環境1のポールP1近傍には、アンテナ固定用のポールP2が、ポールP1に隣接するように設置されている。ポールP2は、上記タグ読取装置のアンテナA2を所定位置に備える。アンテナA2は、検知エリアB2におけるタグ読取りを可能とする。また、アンテナA1,A2の間に位置する境界線C周辺には、検知エリアB1,B2が重なり合う領域B3が形成されている。環境1内に所在する人等の移動体Mには、RFIDのタグ10が貼付されている。
【0013】
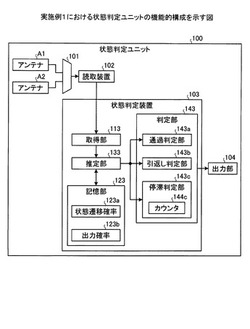
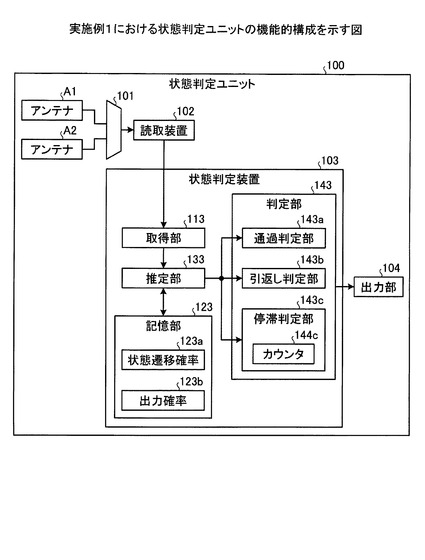
まず、本願の開示する一実施例に係る状態判定ユニットの構成を説明する。図2は、本実施例に係る状態判定ユニット100の機能的構成を示す図である。図2に示すように、状態判定ユニット100は、上述のアンテナA1,A2と、アンテナ切替装置101と、読取装置102と、状態判定装置103と、出力部104とを有する。これら各構成部分は、一方向又は双方向に、信号やデータの入出力が可能なように接続されている。
【0014】
アンテナA1,A2は、図1に示した環境1に併設され、同一の周波数帯域を有する。アンテナ切替装置101は、これら周波数帯域の等しいアンテナA1,A2による、異なるエリアでのタグ検知を可能とするため、所定の時間間隔でアンテナA1,A2を切り替える。時間間隔は、例えば50msである。
【0015】
読取装置102は、アンテナA1,A2が検知したタグのIDを、検知したアンテナのIDと併せて、アンテナ切替装置101経由で入力する。そして、読取装置102は、対応付けられたこれらのIDを検知結果として、後段の状態判定装置103に出力する。この出力は、アンテナA1,A2の切替え周期の2倍の時間間隔(例えば、100ms)で行われる。
【0016】
状態判定装置103は、読取装置102から入力されるタグ検知結果を基に、環境1に存在する移動体Mの状態を判定し、判定結果を出力部104に出力する。状態判定装置103は、図2に示すように、取得部113と、記憶部123と、推定部133と、判定部143とを有する。
【0017】
取得部113は、読取装置102の出力したタグ検知結果を取得する。タグ検知結果には、例えば、“A1:タグ10、A2:タグ20”というように、アンテナのIDと、アンテナの検知したタグのIDとが対応付けられている。取得部113は、このタグ検知結果を、推定部133に出力する。
【0018】
記憶部123には、状態遷移確率123aと出力確率123bとが対応付けて記憶されている。状態遷移確率123aは、環境1におけるタグ10の状態の遷移とともに、各状態から他の状態に遷移する確率である。出力確率123bは、各状態においてタグ10の検知または未検知を示す複数の検知情報(出力シンボルk)それぞれが出力される確率である。
【0019】
推定部133は、取得部113から入力されたタグ検知結果を基に、タグ10が現在到達している状態を推定する。すなわち、推定部133は、タグ10について複数の検知情報が順に出力された場合に、記憶部123に記憶された状態遷移確率123a及び出力確率123bの規定された確率オートマトンを用いて、タグ10が到達した状態を推定する。推定部133は、検知情報が検知される度に、タグ10の現在の状態を逐次推定する。推定部133は、状態の推定結果(例えば、後述のS1,S5)を、例えば100ms間隔で、判定部143に出力する。なお、推定部133は、タグ10が別の状態に遷移しなかった場合にも、所定時間の経過に伴い、上記推定結果を出力する。
【0020】
判定部143は、推定部133から入力された検知状態推定結果を基に、対応するタグの付された移動体Mの状態を判定する。判定部143は、通過判定部143a、引返し判定部143b、及び停滞判定部143cを有する。判定部143は、状態種別毎に3つの判定部から構成される。通過判定部143aは、環境1において、移動体Mが通過したか否かの判定を行う。また、引返し判定部143bは、環境1において、移動体Mが引返しをしたか否かの判定を行う。更に、停滞判定部143cは、環境1において、移動体Mが停滞したか否かの判定を行う。停滞判定部143cは、移動体Mが任意の状態に停滞しているか否かを判断するための指標として、カウンタ144cを有する。停滞判定部143cは、カウンタ144cの値が閾値T以上になると、移動体Mが停滞していると判定する。
【0021】
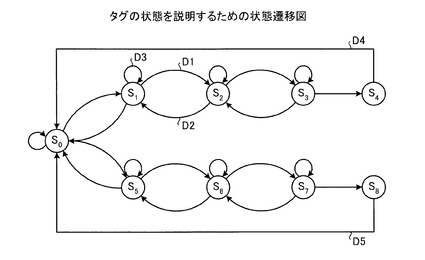
図3は、タグの状態を説明するための状態遷移図である。図3に示すように、環境1におけるタグの状態として、S0〜S8の9つの状態がある。以下、9つの状態が如何なる状態であるか説明する。S0は、タグが未検知の状態である。S1は、タグが検知エリアB1(図1参照)で検知された状態である。S2は、タグが検知エリアB3(図1参照)で検知された状態である。なお、検知エリアB3は、検知エリアB1と検知エリアB2とが重なり合う領域である。S3は、タグが検知エリアB2(図1参照)で検知された状態である。S4は、タグが検知エリアB2を抜けて未検知となった状態である。S5は、S3同様、タグが検知エリアB2(図1参照)で検知された状態である。S6は、S2同様、タグが検知エリアB3(図1参照)で検知された状態である。S7は、S1同様、タグが検知エリアB1(図1参照)で検知された状態である。S8は、タグが検知エリアB1を抜けて未検知となった状態である。
【0022】
図3中の矢印は、状態が遷移する様子を示す。例えば、図3の矢印D1は、タグが状態S1から状態S2に遷移したことを示す。また、矢印D2は、タグが状態S2から状態S1に遷移したことを示す。また、矢印D3は、タグが状態S1に留まっていたこと、すなわち、図1に示したアンテナA1のエリア内にタグが停止していたことを示す。更に、矢印D4,D5は、状態S4,S8がそれぞれタグ未検知の初期状態S0に自動的にリセットされたことを示す。
【0023】
図3において、読取装置102に誤動作が生じない場合、読取装置102によるタグ検知をイベントとして、タグの状態は遷移する。しかし、移動体Mが検知エリアB1に留まっていると、読取装置102からタグ検知結果が取得される度に、「アンテナA1が同一IDのタグを検知している」というイベントが繰り返し発生する。このような状況にも対応するため、状態Sn(nは0〜8の整数)は、イベントを機に自己の状態に戻る自己ループ(例えば、上記矢印D3)を有する。また、移動体MがアンテナA1とアンテナA2との間を往復したり、途中で引き返したりする場合を想定し、各状態Sn(n=0,1,2,3,5,6,7)は、異なる2つの状態間を双方向に遷移可能な経路を有する。
【0024】
出力部104は、判定部143から入力された、移動体Mの状態(通過、引返し、停滞)を判定結果として出力する。
【0025】
なお、図2に示した状態判定装置103は、物理的には、例えばパーソナルコンピュータによって実現される。また、取得部113、推定部133、判定部143は、物理的には、例えばCPU(Central Processing Unit)、あるいはASIC(Application Specific Integrated Circuit)等の集積回路によって実現される。記憶部123は、物理的には、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ等の半導体メモリ素子によって実現される。また、出力部104は、物理的には、例えば液晶ディスプレイ等の表示装置によって実現される。
【0026】
次に、実施例1における状態判定装置103の動作を説明する。
【0027】
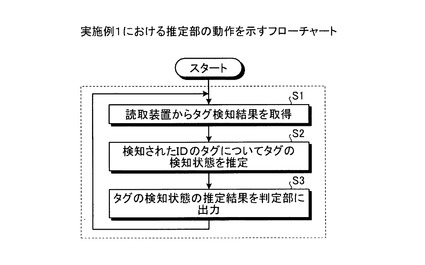
まず、図4を参照しながら、推定部133により実行される一連の処理を説明する。図4は、実施例1における推定部133の動作を示すフローチャートである。
【0028】
まず、推定部133は、読取装置102の出力するタグ検知結果を取得する(ステップS1)。このタグ検知結果には、検知されたタグのIDと、これを検知したアンテナのIDとが、少なくとも含まれている。次に、推定部133は、検知されたタグIDについて、タグの状態を推定する(ステップS2)。この推定は、環境におけるタグの状態遷移に対して、状態遷移確率と出力確率とを適用することにより行われる。そして、推定部133は、この推定結果を判定部143に出力する(ステップS3)。
【0029】
ステップS1〜S3の一連のサイクルは、例えば100ms周期等、一定の間隔で繰り返し実行される。
【0030】
続いて、図5〜図15を参照しながら、判定部143の動作を説明する。
【0031】
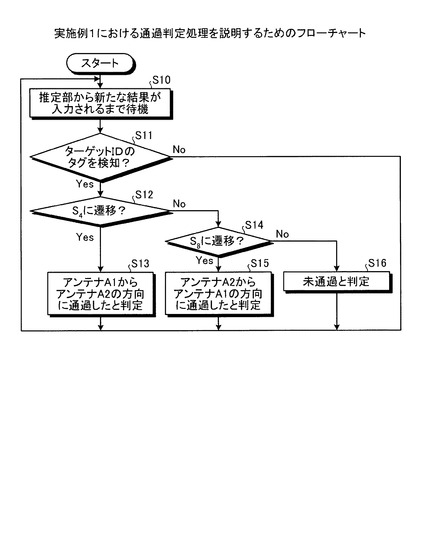
まず、通過判定処理について説明する。図5は、実施例1における通過判定処理を説明するためのフローチャートである。ステップS10では、判定部143の通過判定部143aは、推定部133から新たな推定結果が入力されるまで待機する。通過判定の対象となるIDのタグが検知されると(ステップS11;Yes)、通過判定部143aは、タグの状態が状態S4に遷移したか否かを判定する(ステップS12)。当該判定の結果、状態S4に遷移した場合(ステップS12;Yes)、通過判定部143aは、環境1において、移動体MがアンテナA1からアンテナA2の方向に「通過」したと判定する(ステップS13)。そして、ステップS10に戻り、それ以降の処理を実行する。
【0032】
一方、ステップS12における判定の結果、状態S4に遷移していない場合(ステップS12;No)、通過判定部143aは、タグが状態S8に遷移したか否かを判定する(ステップS14)。当該判定の結果、状態S8に遷移した場合(ステップS14;Yes)には、通過判定部143aは、環境1において、移動体MがアンテナA2からアンテナA1の方向に「通過」したと判定する(ステップS15)。そして、ステップS10に戻り、それ以降の処理を実行する。
【0033】
また、ステップS14における判定の結果、状態S8に遷移していない場合(ステップS14;No)、通過判定部143aは、環境1において、移動体Mが何れの方向にも通過していない(未通過状態)と判定する(ステップS16)。そして、ステップS10に戻り、それ以降の処理を実行する。なお、ステップS11において、通過判定の対象となるIDのタグが検知されない場合にも(ステップS11;No)、ステップS10に戻り、それ以降の処理を実行する。
【0034】
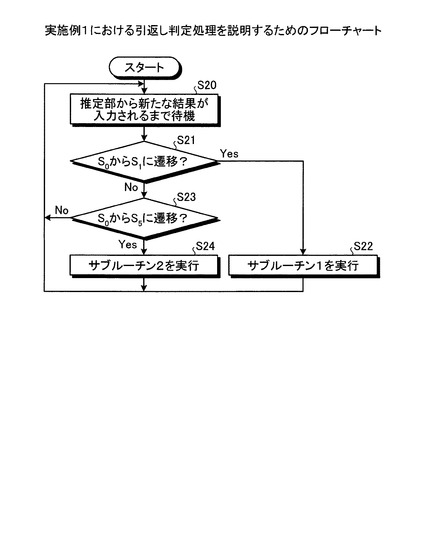
次に、図6〜図8を参照しながら、引返し判定処理について説明する。図6は、実施例1における引返し判定処理を説明するためのフローチャートである。ステップS20では、判定部143の引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する。引返し判定部143bは、タグの状態が状態S0から状態S1に遷移したか否かを判定する(ステップS21)。当該判定の結果、状態S1に遷移した場合(ステップS21;Yes)には、引返し判定部143bは、後述するサブルーチン1を実行する(ステップS22)。
【0035】
一方、ステップS21における判定の結果、タグが状態S0から状態S1に遷移していない場合(ステップS21;No)、引返し判定部143bは、タグが状態S0(S4がリセットされた状態)から状態S5に遷移したか否かを判定する(ステップS23)。当該判定の結果、状態S5に遷移した場合(ステップS23;Yes)には、引返し判定部143bは、後述するサブルーチン2を実行する(ステップS24)。なお、上記ステップS23における判定の結果、状態S5に遷移していない場合(ステップS23;No)には、ステップS20に戻り、それ以降の処理を実行する。
【0036】
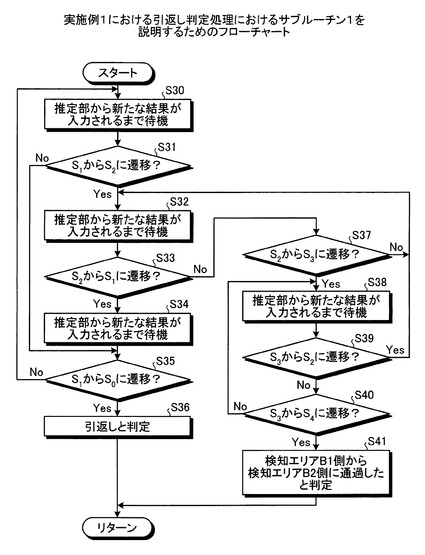
続いて、図7を参照しながら、上述のサブルーチン1(ステップS22)について詳述する。図7は、実施例1における引返し判定処理におけるサブルーチン1を説明するためのフローチャートである。
【0037】
ステップS30では、判定部143の引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する。引返し判定部143bは、タグの状態が状態S1から状態S2に遷移したか否かを判定する(ステップS31)。当該判定の結果、状態S2に遷移した場合(ステップS31;Yes)には、引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する(ステップS32)。引返し判定部143bは、タグの状態が状態S2から状態S1に遷移したか否かを判定する(ステップS33)。当該判定の結果、状態S1に遷移した場合(ステップS33;Yes)には、引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する(ステップS34)。引返し判定部143bは、タグの状態が状態S1から状態S0に遷移したか否かを判定する(ステップS35)。当該判定の結果、状態S0に遷移した場合(ステップS35;Yes)には、引返し判定部143bは、移動体Mの状態を「引返し」と判定する(ステップS36)。そして、サブルーチン1は終了する。サブルーチン1の終了後は、ステップS20に戻る(図7のリターン)。
【0038】
なお、ステップS31における判定の結果、状態S1から状態S2に遷移していない場合(ステップS31;No)には、引返し判定部143bは、上述したステップS32〜S34の処理を省略して、ステップS35の処理を実行する。また、ステップS35における判定の結果、状態S1から状態S0に遷移していない場合(ステップS35;No)には、引返し判定部143bは、再びステップS30以降の処理を実行する。
【0039】
また、ステップS33における判定の結果、状態S1に遷移していない場合(ステップS33;No)には、引返し判定部143bは、引き続き、タグの状態が状態S2から状態S3に遷移したか否かを判定する(ステップS37)。当該判定の結果、状態S3に遷移した場合(ステップS37;Yes)には、引返し判定部143bは更に、推定部133から新たな推定結果が入力されるまで待機する(ステップS38)。引返し判定部143bは、タグの状態が状態S3から状態S2に遷移したか否かを判定する(ステップS39)。当該判定の結果、状態S2に遷移していない場合(ステップS39;No)には、引返し判定部143bは更に、タグの状態が状態S3から状態S4に遷移したか否かを判定する(ステップS40)。当該判定の結果、状態S4に遷移した場合(ステップS40;Yes)には、引返し判定部143bは、移動体Mが、検知エリアB1側から検知エリアB2側に「通過」したと判定する(ステップS41)。そして、サブルーチン1は終了する。
【0040】
なお、ステップS37における判定の結果、状態S2から状態S3に遷移していない場合(ステップS37;No)には、引返し判定部143bは、再びステップS32以降の処理を実行する。また、ステップS39における判定の結果、状態S3から状態S2に遷移した場合(ステップS39;Yes)には、引返し判定部143bは、再びステップS32以降の処理を実行する。更に、ステップS40における判定の結果、状態S3から状態S4に遷移していない場合(ステップS40;No)には、引返し判定部143bは、再びステップS38以降の処理を実行する。
【0041】
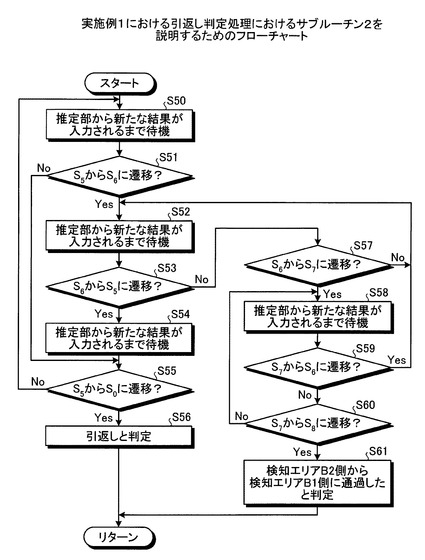
次に、上述のサブルーチン2(図6に示したステップS24)について説明する。図8は、実施例1における引返し判定処理におけるサブルーチン2を説明するためのフローチャートである。図7では、状態S1〜S4(図3参照)における引返し判定処理を想定したが、図8では、状態S5〜S8(図3参照)における引返し判定処理を想定している。図7及び図8は、状態遷移の方向が反対方向となっている点を除き同一であるため、詳細な説明は省略するが、図8のステップS50〜S56は、図7のステップS30〜S36にそれぞれ対応する。また、図8のステップS57〜S61は、図7のステップS37〜S41にそれぞれ対応する。更に、状態S5〜S8は、状態S1〜S4にそれぞれ対応する。サブルーチン1では、引返し判定部143bは、検知エリアB1側から検知エリアB2側への通過を判定したが(図7のステップS41)、サブルーチン2では、引返し判定部143bは、これとは逆方向の通過を判定する(図8のステップS61)。なお、図8のステップS55における状態S0は、状態S4がリセットされた結果である。
【0042】
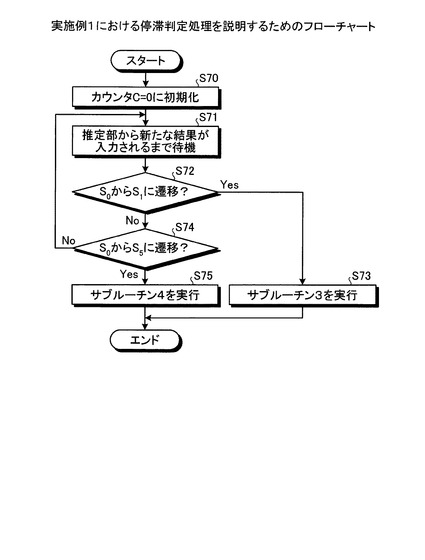
次に、図9〜図15を参照しながら、停滞判定処理について説明する。図9は、実施例1における停滞判定処理を説明するためのフローチャートである。ステップS70では、判定部143の停滞判定部143cは、停滞判定用のカウンタ144cを初期化し“C=0”とする。停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する(ステップS71)。停滞判定部143cは、タグの状態が状態S0から状態S1に遷移したか否かを判定する(ステップS72)。当該判定の結果、状態S1に遷移した場合(ステップS72;Yes)には、停滞判定部143cは、後述するサブルーチン3を実行する(ステップS73)。
【0043】
一方、ステップS72における判定の結果、タグが状態S0から状態S1に遷移していない場合(ステップS72;No)、停滞判定部143cは、タグが状態S0(S4がリセットされた状態)から状態S5に遷移したか否かを判定する(ステップS74)。当該判定の結果、状態S5に遷移した場合(ステップS74;Yes)には、停滞判定部143cは、後述するサブルーチン4を実行する(ステップS75)。なお、上記ステップS74における判定の結果、状態S5に遷移していない場合(ステップS74;No)には、ステップS71に戻り、それ以降の処理を実行する。
【0044】
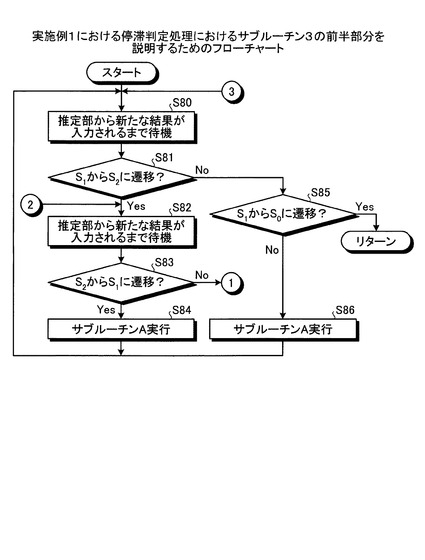
続いて、図10〜図12を参照しながら、上述のサブルーチン3(ステップS73)について詳述する。図10は、実施例1における停滞判定処理におけるサブルーチン3の前半部分を説明するためのフローチャートである。
【0045】
ステップS80では、判定部143の停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する。停滞判定部143cは、タグの状態が状態S1から状態S2に遷移したか否かを判定する(ステップS81)。当該判定の結果、状態S2に遷移した場合(ステップS81;Yes)には、停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する(ステップS82)。停滞判定部143cは、タグの状態が状態S2から状態S1に遷移したか否かを判定する(ステップS83)。当該判定の結果、状態S1に遷移した場合(ステップS83;Yes)には、停滞判定部143cは更に、後述のサブルーチンAを実行する(ステップS84)。
【0046】
また、ステップS81における判定の結果、状態S2に遷移していない場合(ステップS81;No)には、停滞判定部143cは、引き続き、タグの状態が状態S1から状態S0に遷移したか否かを判定する(ステップS85)。当該判定の結果、状態S0に遷移した場合(ステップS85;Yes)には、サブルーチン3は終了する。このサブルーチン3の終了に伴い、一連の停滞判定処理は終了する(図9のエンド)。一方、状態S0に遷移していない場合(ステップS85;No)には、停滞判定部143cは、移動体Mが状態S1に停滞していると判定し、後述のサブルーチンAを実行する(ステップS86)。
【0047】
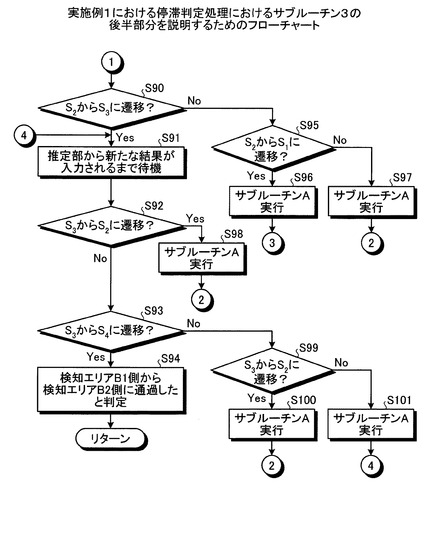
図11は、実施例1における停滞判定処理におけるサブルーチン3の後半部分を説明するためのフローチャートである。上記ステップS83における判定の結果、状態S1に遷移していない場合(ステップS83;No)には、停滞判定部143cは、移動体Mが状態S2に停滞していると判定し、図11のステップS90以降の処理を実行する。ステップS90では、停滞判定部143cは、タグの状態が状態S2から状態S3に遷移したか否かを判定する。当該判定の結果、状態S3に遷移した場合(ステップS90;Yes)には、停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する(ステップS91)。停滞判定部143cは、タグの状態が状態S3から状態S2に遷移したか否かを判定する(ステップS92)。当該判定の結果、状態S2に遷移していない場合(ステップS92;No)には、停滞判定部143cは更に、移動体Mが状態S3に停滞していると判定し、タグの状態が状態S3から状態S4に遷移したか否かを判定する(ステップS93)。当該判定の結果、状態S4に遷移した場合(ステップS93;Yes)には、停滞判定部143cは、移動体Mが、検知エリアB1側から検知エリアB2側に「通過」したと判定する(ステップS94)。そして、サブルーチン3を終了する。このサブルーチン3の終了に伴い、一連の停滞判定処理は終了する(図9のエンド)。
【0048】
また、ステップS90における判定の結果、状態S3に遷移していない場合(ステップS90;No)には、停滞判定部143cは、引き続き、タグの状態が状態S2から状態S1に遷移したか否かを判定する(ステップS95)。当該判定の結果、状態S1に遷移した場合(ステップS95;Yes)には、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS96)。実行後、停滞判定部143cは、図10のステップS80以降の処理を再び実行する。一方、上記ステップS95における判定の結果、状態S1に遷移していない場合(ステップS95;No)には、移動体Mが状態S2に停滞していると判定し、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS97)。そして、停滞判定部143cは、図10のステップS82以降の処理を再び実行する。
【0049】
上記ステップS92における判定の結果、状態S3から状態S2に遷移した場合(ステップS92;Yes)には、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS98)。実行後は、上述のステップS97と同様、停滞判定部143cは、図10のステップS82以降の処理を再び実行する。
【0050】
更に、ステップS93における判定の結果、状態S4に遷移していない場合(ステップS93;No)には、停滞判定部143cは、引き続き、タグの状態が状態S3から状態S2に遷移したか否かを判定する(ステップS99)。当該判定の結果、状態S2に遷移した場合(ステップS99;Yes)には、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS100)。そして、上述のステップS97及びS98と同様、停滞判定部143cは、図10のステップS82以降の処理を再び実行する。一方、上記ステップS99における判定の結果、状態S2に遷移していない場合(ステップS99;No)には、移動体Mが状態S3に停滞していると判定し、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS101)。そして、停滞判定部143cは、上述のステップS91以降の処理を再び実行する。
【0051】
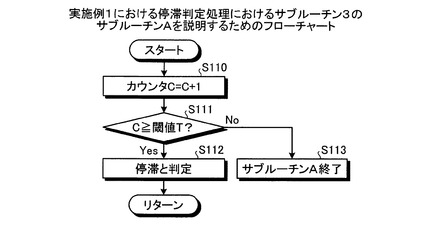
図12は、実施例1における停滞判定処理におけるサブルーチン3のサブルーチンAを説明するためのフローチャートである。図12のステップS110では、判定部143の停滞判定部143cは、停滞判定用のカウンタ144cの値を1つインクリメントする。停滞判定部143cは、カウンタ144cと閾値Tとの大小を比較し(ステップS111)、C≧閾値Tである場合(ステップS111;Yes)には、停滞判定部143cは、移動体Mの状態を「停滞」と判定する(ステップS112)。そして、サブルーチンAは終了する。一方、ステップS111における比較の結果、C<閾値Tである場合(ステップS111;No)には、そのままサブルーチンAを終了する(ステップS113)。
【0052】
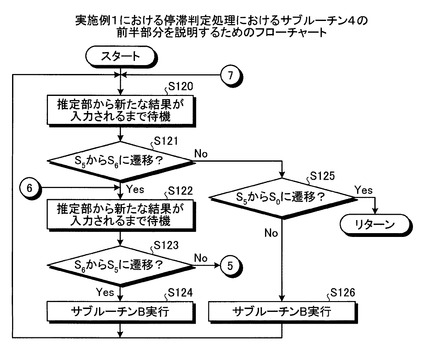
次に、上述のサブルーチン4(図9に示したステップS75)について説明する。図13は、実施例1における停滞判定処理におけるサブルーチン4の前半部分を説明するためのフローチャートである。図10では、状態S1〜S4(図3参照)における停滞判定処理を想定したが、図13では、状態S5〜S8(図3参照)における停滞判定処理を想定している。図10及び図13は、状態遷移の方向が反対方向となっている点を除き同一であるため、詳細な説明は省略するが、図13のステップS120〜S126は、図10のステップS80〜S86にそれぞれ対応する。また、状態S5〜S8は、状態S1〜S4にそれぞれ対応する。更に、サブルーチンBは、サブルーチンAと同様の処理である。
【0053】
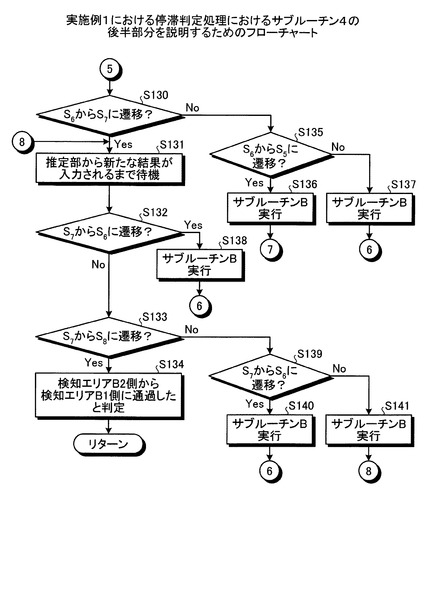
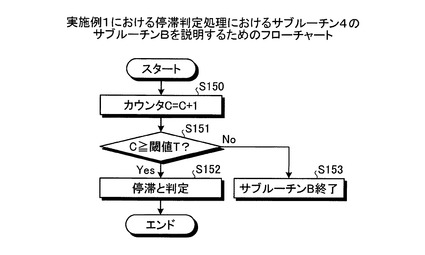
同様に、図14は図11に対応し、図15は図12に対応する。図14は、実施例1における停滞判定処理におけるサブルーチン4の後半部分を説明するためのフローチャートである。図14のステップS130〜S141は、図11のステップS90〜S101にそれぞれ対応する。サブルーチン3では、停滞判定部143cは、検知エリアB1側から検知エリアB2側への通過を判定したが(図11のステップS94)、サブルーチン4では、停滞判定部143cは、これとは逆方向の通過を判定する(図14のステップS134)。また、図15は、実施例1における停滞判定処理におけるサブルーチン4のサブルーチンBを説明するためのフローチャートである。図15のステップS150〜S153は、図12のステップS110〜S113にそれぞれ対応する。
【0054】
上述したように、状態判定装置103は、一連の引返し判定処理を実行することで、移動体Mが、図3に示した状態S1,S2,S3の何れの状態から引き返した場合にも、引返しの判定を行うことができる。これと同様に、状態判定装置103は、一連の停滞判定処理を実行することで、移動体Mが状態S1,S2,S3の何れの状態に停滞した場合にも対応することができる。
【0055】
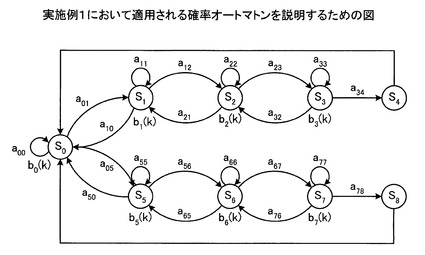
以上、動作を説明したが、本実施例における状態判定装置103は、環境1において、読取装置102による誤動作(タグ10の未検知や誤検知)に対応すべく、図16に示す確率オートマトンを用いる。確率オートマトンは、例えば、隠れマルコフモデル(HMM:Hidden Markov Model)である。図16は、実施例1において適用される確率オートマトンを説明するための図である。図16において、“aij”は、状態Siから状態Sjへの遷移確率を表す。また、“bi(k)”は、状態Siにおいてシンボルkを出力する確率を表す。また、“k”は、対応する検知エリア内においてタグが検知されたという出力シンボルを表す。例えば、検知エリアB1内にタグ10が検知されたときの出力シンボルは“k=A1”であり、検知エリアB2内にタグ10が検知されたときの出力シンボルは“k=A2”である。また、検知エリアB3内にタグ10が検知されたときの出力シンボルは“k=A12”であり、何れの検知エリアにおいてもタグ10が検知されないとき(未検知)の出力シンボルは“k=Non”である。したがって、例えば、b1(A1)は、状態S1において、検知エリアB1内でタグが検知されたと出力する確率を示し、b2(A12)は、状態S2において、検知エリアB3内でタグが検知されたと出力する確率を示す。また、b3(Non)は、状態S3において、何れの検知エリアにもタグが検知されていないと出力する確率を示す。
【0056】
上記確率オートマトンを用いることで、例えば、状態S1において、それぞれの検知エリア内でタグが検知されたというシンボルを出力確率は、“b1(A1)=0.8”、“b1(A2)=0.05”、“b1(A12)=0.05”、“b1(Non)=0.1”のように表される。これにより、アンテナA1の検知エリアB1内にタグがあるにも拘らず、検知エリアB3内にタグがあると検知(誤検知)される確率b1(A12)が、0.05と定義される。同様に、アンテナA1の検知エリアB1内にタグがあるにも拘らず、検知されない(未検知の)確率b1(Non)は、0.1と定義される。
【0057】
確率オートマトンを用いることで、以下に説明するような状態推定が可能となる。読取装置102による、あるIDのタグの初回検知から最新検知までの時系列の検知データを「観測シンボルy」と表す。例えば、タグ10について、読取装置102が「未検知」、「アンテナA1で検知」、「アンテナA1で検知」、「アンテナA2で検知」の順に検知した場合、観測シンボルは、y=Non A1 A1 A2という時系列データとなる。図16に示した確率オートマトンにおいて、このような観測シンボルyが与えられたときに状態Si(iは0〜8の整数)となる確率は、p(Si│y)によって表される。状態判定装置103の推定部133は、タグ10について、ある観測シンボルyが与えられたとき、全ての状態Siについてp(Si│y)を算出し、最も確率の高い状態Siを求めることで、タグ10の現在の状態を推定する。例えば、p(Si│y)のうち、p(S4│y)が最大となった場合、推定部133は、タグ10が状態S4に到達したと推定する。そして、判定部143は、上述した通過判定処理を実行することにより、タグ10の付された移動体Mが、検知エリアB1から検知エリアB2に向かう方向に通過したと判定する。
【0058】
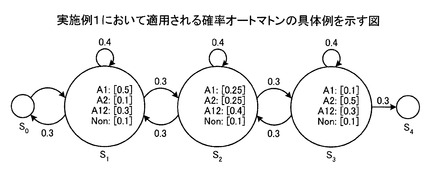
図17は、各状態S0〜S4について、実施例1において適用される確率オートマトンの具体例を示す図である。図17において、状態S1〜S3内に示す数値は、各状態におけるシンボルkの出力確率である。例えば、状態S1では、A1,A2,A12,Non(未検知)を出力する確率はそれぞれ0.5,0.1,0.3,0.1である。また、各状態S0〜S4間を結ぶ矢印に付された数値は、状態遷移確率を表す。例えば、状態S1から状態S1に遷移(自己ループ)する確率は0.4、状態S1から状態S0に遷移する確率は0.3、状態S1から状態S2に遷移する確率は0.3である。
【0059】
以下、推定部133が、タグ10に関する特徴ベクトル(A1,A12,A2,Non)を観測した場合を想定し、タグ10の到達した状態(遷移先)を推定する方法について説明する。タグ10の到達状態として最も確率の高い状態は、以下のように算出される。特徴ベクトルが入力されてS0に到達した状態をω0とする。同様に、S1に到達した状態をω1、S2に到達した状態をω2、S3に到達した状態をω3、S4に到達した状態をω4とする。初期状態がS0のとき、特徴ベクトルが観測されてS1→S1→S1→S0と遷移した場合における確率は、以下のように算出される。
【0060】
p(A1│S1)×p(S1→S1)×p(A12│S1)×p(S1→S1)×p(A2│S1)×p(S1→S0)=0.5×0.4×0.3×0.4×0.1×0.3=0.00072
【0061】
ここで、p(A1│S1)は、状態S1においてA1を観測したと出力される確率(出力確率)であり、p(S1→S1)は、状態S1から状態S1に遷移する確率(状態遷移確率)である。
【0062】
S1→S1→S1→S0以外の状態遷移についても同様に、特徴ベクトル(A1,A12,A2,Non)が観測されたときに到達する可能性のある全ての状態について、上記確率を算出すると、以下のようになる。
【0063】
S1→S2→S1→S0と遷移した場合の確率は0.000675
S1→S1→S1→S1と遷移した場合の確率は0.000096
S1→S1→S2→S1と遷移した場合の確率は0.000135
S1→S2→S1→S1と遷移した場合の確率は0.00009
S1→S2→S2→S1と遷移した場合の確率は0.000225
S1→S1→S1→S2と遷移した場合の確率は0.00072
S1→S1→S2→S2と遷移した場合の確率は0.00018
S1→S2→S1→S2と遷移した場合の確率は0.0000675
S1→S2→S2→S2と遷移した場合の確率は0.0003
S1→S2→S3→S2と遷移した場合の確率は0.0003375
S1→S1→S2→S3と遷移した場合の確率は0.000135
S1→S2→S2→S3と遷移した場合の確率は0.000225
S1→S2→S3→S3と遷移した場合の確率は0.00045
S1→S2→S3→S4と遷移した場合の確率は0.003375
【0064】
これらは、同時に起こり得ない独立事象であるので、ω0〜ω4となる確率は、それぞれ以下のように算出される。
【0065】
p(A1,A12,A2,Non│ω0)=0.00072+0.000675=0.001395
p(A1,A12,A2,Non│ω1)=0.00096+0.000135+0.00009+0.000225=0.000546
p(A1,A12,A2,Non│ω2)=0.000072+0.00018+0.0000675+0.0003+0.0003375=0.000957
p(A1,A12,A2,Non│ω3)=0.000135+0.000225+0.00045=0.00081
p(A1,A12,A2,Non│ω4)=0.003375
【0066】
上記ω0〜ω4の事前確率は等しいことから、p(ω0)=p(ω1)=p(ω2)=p(ω3)=p(ω4)=0.2となる。
【0067】
したがって、特徴ベクトル(A1,A12,A2,Non)が観測された場合における最も確率の高い到達状態は、ベイズの定理より、以下のように求められる。
【0068】
p(ω0│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω0)×p(ω0)=0.000279
p(ω1│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω1)×p(ω1)=0.000109
p(ω2│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω2)×p(ω2)=0.000191
p(ω3│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω3)×p(ω3)=0.000162
p(ω4│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω4)×p(ω4)=0.000675
【0069】
以上より、推定部133は、図17の確率オートマトンにおいて、特徴ベクトル(A1,A12,A2,Non)が観測された際、タグ10が最も到達する確率の高い状態を、状態S4と推定する。
【0070】
なお、上記説明では、状態S0〜S4(図3の上側)について、確率オートマトンを用いた推定方法について説明したが、推定部133は、状態S0及び状態S5〜S8(図3の下側)についても同様の算出手法により、タグ10の到達状態を推定することができる。
【0071】
上述してきたように、本実施例における状態判定装置103は、記憶部123と推定部133と判定部143とを有する。記憶部123には、状態遷移確率123aと出力確率123bとが対応付けて記憶される。状態遷移確率123aは、環境1におけるタグ10の状態の遷移とともに、各状態S0〜S8から他の状態に遷移する確率である。出力確率123bは、各状態S0〜S8においてタグ10の検知または未検知を示す複数のシンボルkそれぞれが出力される確率である。推定部133は、タグ10について複数のシンボルkが順に出力された場合に、記憶部123に記憶された状態遷移確率123a及び出力確率123bを用いて、タグ10が到達した状態を推定する。判定部143は、推定部133により推定された状態に基づき、タグ10の通過を判定する。状態判定装置103は、状態遷移確率123aと出力確率123bとが規定された確率オートマトンを用いて、状態S0〜S8の中から、人が到達した確率が最も高い状態を求め、その状態から人の通過を判定する。換言すれば、状態判定装置103は、タグ10の未検知や誤検知といった誤動作までも考慮して、状態の推定を行う。したがって、状態判定装置103は、誤動作が生じた場合でも最も高い確率で、タグ10を所持する移動体Mの状態推定を行うことができる。その結果、状態判定の精度が向上する。
【0072】
本実施例における状態判定装置103は、図3、図16あるいは図17に示したような、自己ループと2つの状態間を双方向に遷移可能な経路とを有する状態遷移図を用いて、タグの検知をイベントとする状態遷移により、タグの状態を推定する。このため、状態判定装置103は、読取装置102の誤動作の発生パターンに合わせて、タグの状態を判別するためのパターンテーブルを無数に用意する必要がない。つまり、状態判定装置103は、確率オートマトンを用いることにより、タグが到達した状態の推定を簡易な構成で行うことができる。
【0073】
更に、本実施例における状態判定装置103によれば、判定部143は、推定部133により推定された状態に基づき、タグ10の引返し、停滞を判定する。これにより、状態判定装置103は、タグ10の到達状態ひいては移動体Mの状態として、通過のみならず、引返しや停滞をも判定することができる。したがって、状態判定装置103は、移動体Mが検知エリアを通過することなく途中で戻った場合、あるいは、移動体Mが検知エリア近傍に立ち止っている場合にも、その事を精度良く判定することができる。その結果、移動体Mの挙動を、より詳細かつ高精度に把握することが可能となる。
【実施例2】
【0074】
次に、実施例2における状態判定ユニットの構成について説明する。図18は、実施例2における状態判定ユニットの機能的構成を示す図である。図18は、本実施例に係る状態判定ユニット200の機能的構成を示す図である。図18に示すように、状態判定ユニット200は、上述のアンテナA1,A2と、アンテナ切替装置201と、読取装置202と、状態判定装置203と、出力部204とを有する。これら各構成部分は、一方向又は双方向に、信号やデータの入出力が可能なように接続されている。
【0075】
状態判定装置203は、読取装置202から入力されるタグ検知結果を基に、環境1に属する移動体Mの状態を判定し、判定結果を出力部204に出力する。状態判定装置203は、図18に示すように、取得部213と、記憶部223と、推定部233と、判定部243と、調整部253とを有する。記憶部223は、状態遷移確率223a及び出力確率223bを記憶する。判定部243は更に、通過判定部243aと、引返し判定部243bと、カウンタ244cを有する停滞判定部243cとを有する。
【0076】
状態判定ユニット200は、調整部253を更に有する点を除き、実施例1における状態判定ユニット100と同様の構成を有する。したがって、同様の構成要素には、末尾が同一の参照符号を付すとともに、その詳細な説明は省略する。具体的には、実施例2におけるアンテナ切替装置201と、読取装置202と、状態判定装置203と、出力部204とは、実施例1におけるアンテナ切替装置101と、読取装置102と、状態判定装置103と、出力部104とにそれぞれ対応する構成要素である。また、実施例2における取得部213と、記憶部223と、推定部233と、判定部243とは、実施例1における取得部113と、記憶部123と、推定部133と、判定部143とにそれぞれ対応する。更に、実施例2における記憶部223の状態遷移確率223a及び出力確率223bは、実施例1における状態遷移確率123a及び出力確率123bにそれぞれ対応する。また、実施例2における判定部243の通過判定部243aと、引返し判定部243bとは、実施例1における判定部143の通過判定部143aと、引返し判定部143bとにそれぞれ対応する構成要素である。そして、実施例2におけるカウンタ244cを有する停滞判定部243cは、実施例1におけるカウンタ144cを有する停滞判定部143cに対応する構成要素である。
【0077】
以下、実施例1との主要な差異である調整部253について説明する。調整部253は、確率オートマトン(図16、図17参照)におけるパラメータを学習する。調整部253は、環境1の変化に対応して、上述の状態遷移確率と上述の出力確率とを、環境1に適した値(パラメータ)に自動的に調整する。パラメータの学習には、例えば、隠れマルコフモデルのパラメータ学習法であるBaumWelchアルゴリズムを用いることができる。
【0078】
実施例2における状態判定ユニット200は、実施例1における状態判定ユニット100の奏する効果に加えて、更に以下のような効果を奏する。すなわち、環境1に設置されたアンテナA1,A2付近に新たな物が置かれたり、既存の物の置かれ方が変わったりすると、電波の遮蔽やマルチパスの影響により、読取装置202に誤動作が生じる場合がある。実施例2における状態判定ユニット200によれば、状態判定装置203の調整部253は、このような環境1の変化に合わせて、既存の状態遷移確率、出力確率といったパラメータを適宜更新する。これにより、パラメータが常に最適な値にチューニングされる。したがって、状態判定装置203は、環境1が変化しても、タグ10の到達する状態を精度良く推定することができる。その結果、環境の変化に対してロバストな状態判定が実現される。
【0079】
実施例2における状態判定ユニット200によれば、調整部253は、初期値として設定された状態遷移確率及び出力確率の値(パラメータ)を、観測シンボルyの付与により、その観測結果が反映された値に修正していく。パラメータは、到達状態として最も確率の高い状態が推定される度に、自律的に随時更新される。状態遷移確率や出力確率は、事前に統計的な予測が可能であるが、例えば、アンテナの周辺に遮蔽物が置かれて電波反射の仕方が変わったときには、これに伴い、状態遷移確率や出力確率も変動する。調整部253は、隠れマルコフモデルによる学習効果で、これらの確率の値を環境に合わせて自動的に調整する。この調整に際しては、例えば、上記のBaumWelchのアルゴリズムを適用することができる。これにより、タグの到達した状態について、環境の変化によらず、最適な推定が可能となる。
【0080】
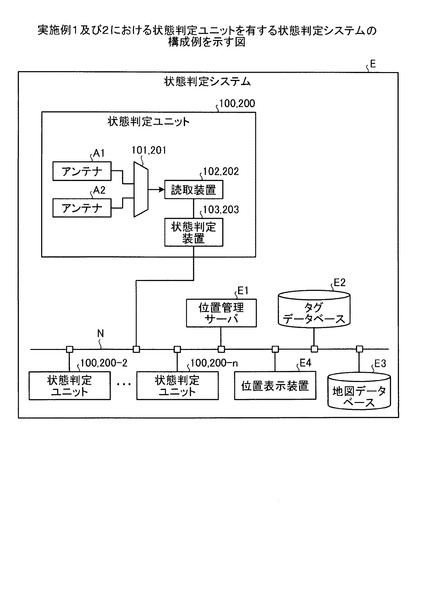
続いて、実施例1及び2における状態判定ユニット100,200を有して構成される状態判定システムEについて説明する。図19は、実施例1及び2における状態判定ユニットを有する状態判定システムの構成例を示す図である。図19に示すように、状態判定システムEは、状態判定ユニット100,200と、これと同様の構成を有する状態判定ユニット100,200−2〜状態判定ユニット100,200−n(nは自然数)とを有する。これらの状態判定ユニット100,200及び100,200−2〜nは、ネットワークNを介して相互に情報の送受信が可能なように接続されている。同じネットワークNには、位置管理サーバE1、タグデータベースE2、地図データベースE3、及び位置表示装置E4が接続されている。
【0081】
状態判定システムEでは、状態判定ユニット100,200及び100,200−2〜nは、所定の環境において、タグを介した人の状態判定を行うのに適した場所に設置される。状態判定ユニット100,200及び100,200−2〜nによる状態判定結果は、位置管理サーバE1に収集される。
【0082】
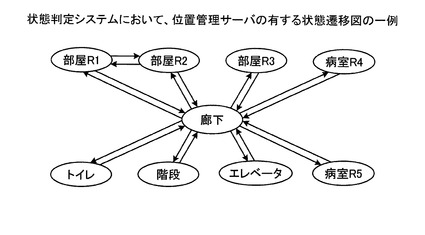
図20は、状態判定システムEにおいて、位置管理サーバE1の有する状態遷移図の一例である。位置管理サーバE1は、状態判定ユニット100,200及び100,200−2〜nから送信された状態判定結果の受信をイベントして、図20に示すような状態遷移図から、タグの付された移動体の所在を判定する。タグデータベースE2には、タグのIDと、対応するタグの貼付された移動体の情報(識別番号、氏名など)とが対応付けられている。この対応付けにより、移動物としてのタグの状態判定を行うことで、移動体の状態判定が可能となる。
【0083】
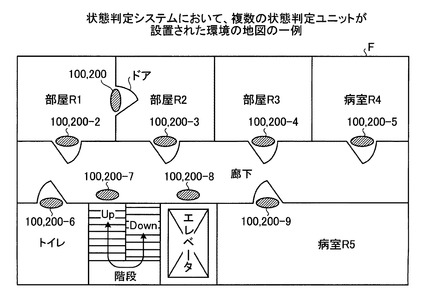
地図データベースE3には、図20に示した状態遷移図に対応する地図データが格納されている。図21は、状態判定システムEにおいて、9つの状態判定ユニット100,200及び100,200−2〜9が設置された環境の地図Fである。図21に示すように、例えば、部屋R1,R2との境界上のドアには、状態判定ユニット100,200が設置されている。なお、図21の部屋R1,R2はそれぞれ、図1に示した検知エリアB2,B1に対応する。これにより、状態判定システムEは、部屋R1と部屋R2との間を行き来する人の状態(通過、引返し、停滞)を判定することができる。また、階段と廊下との境界に位置する状態判定ユニット100,200−7により、階段を上がり終わって廊下に着いた人、あるいはこれから階段を下る人の状態判定が可能となる。更に、エレベータの出入り口付近には、状態判定ユニット100,200−8が設置されているため、エレベータを昇降する人の状態(一旦降りて再び乗る、エレベータを待っている等)を判定することができる。
【0084】
位置表示装置E4は、位置管理サーバE1、タグデータベースE2、及び地図データベースE3のそれぞれから送信される情報を基に、誰が何処にいるかを可視化する。すなわち、位置表示装置E4は、位置管理サーバE1からタグの状態判定結果を受信すると、タグデータベースE2を参照して当該タグの付された人物を特定し、その状態を、地図データベースE3から読み出した地図F上に表示する。地図F上には、移動体の状態と併せて、人物を識別可能な氏名や番号、記号等が表示されるため、利用者は、判定対象の誰がいま何処に所在するのか(現在地)を一目で把握することができる。上記状態判定結果は、環境に適応した確率オートマトンにより得られたものであるため、表示情報は、未検知や誤検知の影響の少ない正確な情報となる。
【0085】
同じ環境内でも、場所によって、物の置かれ方やアンテナの電波強度は異なるが、上述のように、1つの環境に複数の状態判定ユニットを設置することで、同じ環境内における周辺状況の相違にも木目細やかに対応することができる。また、確率オートマトンを用いずに状態判定を行うと、アンテナの設置箇所によって、状態判定の精度にバラつきが生じ易いが、本実施例では、状態遷移確率と出力確率とを用いた演算により、相対的に最も確率の高い状態が到達状態と推定される。したがって、複数の状態のうち、少しでも他の状態よりも高確率のものがあれば、その状態が到達状態として浮上することになる。これにより、アンテナの設置箇所による精度のバラつきは低減される。
【0086】
[状態判定プログラム]
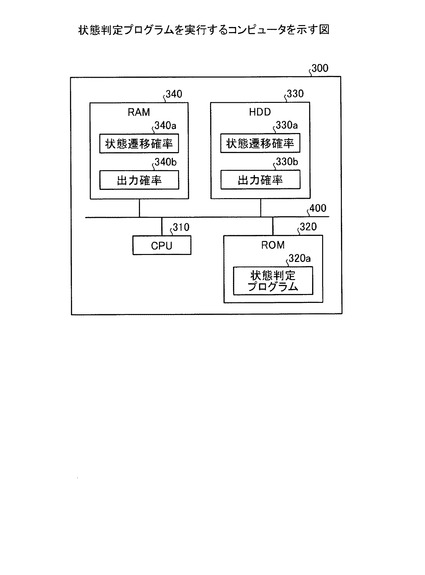
上記実施例で説明した状態判定装置103,203の各種の処理は、予め用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータシステムで実行することによって実現することもできる。そこで、以下では、図22を用いて、上記の実施例で説明した状態判定装置103,203と同様の機能を有する状態判定プログラムを実行するコンピュータの一例について説明する。図22は、状態判定プログラムを実行するコンピュータを示す図である。
【0087】
図22に示すように、上記実施例におけるコンピュータ300は、CPU(Central Processing Unit)310と、ROM(Read Only Memory)320と、HDD(Hard Disk Drive)330と、RAM(Random Access Memory)340とを有する。これら300〜340の各部は、バス400を介して接続される。
【0088】
ROM320には、上記実施例で示す取得部113,213と、推定部133,233と、判定部143,243と、調整部253と同様の機能を発揮する状態判定プログラムが予め記憶される。すなわち、ROM320には、図22に示すように、状態判定プログラム320aが記憶される。なお、状態判定プログラム320aについては、適宜分離してもよい。
【0089】
そして、CPU310が、状態判定プログラム320aをROM320から読み出して実行する。
【0090】
そして、HDD330には、状態遷移確率330aと出力確率330bとが格納される。状態遷移確率330a、及び出力確率330bは、図2に示した状態遷移確率123a、及び出力確率123bに、それぞれ対応する。
【0091】
そして、CPU310は、状態遷移確率330a及び出力確率330bを読み出す。そして、CPU310は、これらをRAM340に記憶させる。CPU310は、RAM340に記憶された状態遷移確率340a及び出力確率340bを用いて、状態判定プログラム320aを実行する。また、CPU310は、RAM340に記憶された状態遷移確率340a及び出力確率340bを用いて、状態判定プログラム320aを実行する。なお、RAM340に記憶される各データ(状態遷移確率340a及び出力確率340b)は、常に全てのデータがRAM340に記憶される必要はなく、処理に必要なデータのみがRAM340に一時記憶されればよい。
【0092】
なお、状態判定プログラム320aは、必ずしも最初からHDD330に記憶させておく必要はない。
【0093】
例えば、コンピュータ300は、コンピュータ300に挿入されるフレキシブルディスク(FD)、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」にプログラムを記憶させておく。そして、コンピュータ300が、これらの媒体からプログラムを読み出して実行するようにしてもよい。
【0094】
さらには、公衆回線、インターネット、LAN、WANなどを介してコンピュータ300に接続される「他のコンピュータ(またはサーバ)」などにプログラムを記憶させておく。そして、コンピュータ300がこれらからプログラムを読み出して実行するようにしてもよい。
【0095】
なお、上記実施例では、本願の開示する状態判定装置をRFIDタグにより実現する例について説明したが、通信方式はこれに限定されるものではない。例えば、赤外線通信を用いてもよい。すなわち、環境側に赤外線受光器を設置し、移動体側に赤外線発光器を持たせ、移動体が受光器の検知エリア内に入った時点で、移動物としての発光器の発信するID信号を受光器が受信するシステムであってもよい。また、通信方式は、無線に限らず、有線通信でもよい。
【0096】
上記実施例では、環境に設置されるアンテナを2箇所としたが、3箇所以上であってもよい。また、上記実施例では、複数のアンテナの電波到達範囲(検知エリア)が重なることを前提として説明したが、これらは重ならなくてもよい。
【0097】
以上の実施例1、2を含む実施形態に関し、さらに以下の付記を開示する。
【0098】
(付記1)環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とを対応付けて記憶する記憶部と、
前記移動物について複数の検知情報が順に出力された場合に、前記記憶部に記憶された状態遷移確率及び出力確率を用いて、前記移動物が到達した状態を推定する推定部と、
前記推定部により推定された状態に基づき、前記移動物の通過を判定する判定部と、
を有することを特徴とする状態判定装置。
【0099】
(付記2)前記判定部は、前記推定部により推定された状態に基づき、前記移動物の引返し、停滞を判定することを特徴とする付記1に記載の状態判定装置。
【0100】
(付記3)前記環境の変化に応じて、前記状態遷移確率と前記出力確率とを調整する調整部を更に有することを特徴とする付記1または2に記載の状態判定装置。
【0101】
(付記4)コンピュータが実行する状態判定方法であって、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
ことを特徴とする状態判定方法。
【0102】
(付記5)コンピュータに、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
処理を実行させることを特徴とする状態判定プログラム。
【符号の説明】
【0103】
1 環境
10 タグ
100,200 状態判定ユニット
100,200−2〜n 状態判定ユニット
102,202 読取装置
103,203 状態判定装置
113,213 取得部
123 記憶部
123a,223a 状態遷移確率
123b,223b 出力確率
133,233 推定部
143,243 判定部
143a,243a 通過判定部
143b,243b 引返し判定部
143c,243c 停滞判定部
144c,244c カウンタ
104,204 出力部
253 調整部
300 コンピュータ
310 CPU
320 ROM
320a 状態判定プログラム
330 HDD
340 RAM
330a,340a 状態遷移確率
330b,340b 出力確率
400 バス
A1,A2 アンテナ
B1,B2,B3 検知エリア
E 状態判定システム
E1 位置管理サーバ
E2 タグデータベース
E3 地図データベース
E4 位置表示装置
M 移動体
N ネットワーク
S0,S1,S2,S3,S4,S5,S6,S7,S8 状態
【技術分野】
【0001】
本発明は、状態判定装置、状態判定方法、及び状態判定プログラムに関する。
【背景技術】
【0002】
近年、人や物の位置を検知する技術として、RTLS(Real Time Location System)が普及しつつある。RTLSは、RFID(Radio Frequency IDentification)やGPS(Global Positioning System)の技術を利用して、リアルタイムに対象物の所在を把握するシステムである。RTLSには、「移動体がどの部屋に居る(在る)か」がわかるもの、あるいは「移動体がどの場所を通過したか」がわかるもの等、様々な方式のものがある。
【0003】
RTLSに関する技術としては、例えば、人体から放出される赤外線を検知する赤外線センサを店舗の出入り口に設置し、検知された情報を用いて、顧客の入店退店を判別する店舗管理システムが知られている。また、RFIDを用いて、物の所在を把握する技術も知られている。この技術では、RFIDタグを移動体に貼付するとともに、環境側にタグ読取装置を設置し、RFIDタグがタグ読取装置の前を通過したか否かを判別することで、移動体の所在を把握する。更に、環境側に質問器を設置するとともに、人等の移動体に応答器を持たせ、応答器が質問器に反応したか否かに基づき、移動体を検出する移動体検出方式が知られている。また、ドア等の人が通過する場所に赤外線通信の受信装置を複数設置するとともに、赤外線通信の送信機を人に携行させ、人がドアを通過した際、受信機が複数のID情報を受信する技術が知られている。この技術では、それら複数のID情報の受信時刻から人の行動態様(歩行や走行)が識別される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−133583号公報
【特許文献2】特開2009−7157号公報
【特許文献3】特開2006−260254号公報
【特許文献4】特開平8−194011号公報
【特許文献5】特開2007−52474号公報
【特許文献6】国際公開第2007/058302号
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した技術では、RFIDや赤外線通信により、受信機が送信機から情報を受信する。すなわち、上述の技術は、受信機をセンサとして利用することで、検知対象の移動を捉える。しかしながら、センサには、センサ自体の特性あるいは環境要因により、誤動作が発生する場合がある。
【0006】
例えば、RFIDを利用する場合、タグ読取装置のアンテナの指向性や電波の到達距離によって、検知エリアが決定される。このため、検知エリア内にタグが在るにも拘らず、タグを検知しなかったり(未検知)、反対に、検知エリア内にタグが無いにも拘らず、タグを検知してしまったり(誤検知)することがある。検知しない例としては、環境側に設置されたタグ読取装置のアンテナの向きに対して、移動体の有するタグが直角の状態にあるため、タグが読み取り難くなる場合がある。一方、誤って検知してしまう例としては、タグからの信号が、環境中にある何らかの物体に反射することで、本来検出すべき読取装置とは異なる別のタグ読取装置がこの信号を検知してしまう場合がある。
【0007】
開示の技術は、上記に鑑みてなされたものであって、移動体の状態を精度良く判定することのできる状態判定装置、状態判定方法、及び状態判定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、本願の開示する状態判定装置は、一つの態様において、記憶部と推定部と判定部とを備えた。前記記憶部は、環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とを対応付けて記憶する。前記推定部は、前記移動物について複数の検知情報が順に出力された場合に、前記記憶部に記憶された状態遷移確率及び出力確率を用いて、前記移動物が到達した状態を推定する。前記判定部は、前記推定部により推定された状態に基づき、前記移動物の通過を判定する。
【発明の効果】
【0009】
本願の開示する状態判定装置の一つの態様によれば、移動体の状態を精度良く判定することができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、実施例1における状態判定の概要を説明するための図である。
【図2】図2は、実施例1における状態判定ユニットの機能的構成を示す図である。
【図3】図3は、タグの状態を説明するための状態遷移図である。
【図4】図4は、実施例1における推定部の動作を示すフローチャートである。
【図5】図5は、実施例1における通過判定処理を説明するためのフローチャートである。
【図6】図6は、実施例1における引返し判定処理を説明するためのフローチャートである。
【図7】図7は、実施例1における引返し判定処理におけるサブルーチン1を説明するためのフローチャートである。
【図8】図8は、実施例1における引返し判定処理におけるサブルーチン2を説明するためのフローチャートである。
【図9】図9は、実施例1における停滞判定処理を説明するためのフローチャートである。
【図10】図10は、実施例1における停滞判定処理におけるサブルーチン3の前半部分を説明するためのフローチャートである。
【図11】図11は、実施例1における停滞判定処理におけるサブルーチン3の後半部分を説明するためのフローチャートである。
【図12】図12は、実施例1における停滞判定処理におけるサブルーチン3のサブルーチンAを説明するためのフローチャートである。
【図13】図13は、実施例1における停滞判定処理におけるサブルーチン4の前半部分を説明するためのフローチャートである。
【図14】図14は、実施例1における停滞判定処理におけるサブルーチン4の後半部分を説明するためのフローチャートである。
【図15】図15は、実施例1における停滞判定処理におけるサブルーチン4のサブルーチンBを説明するためのフローチャートである。
【図16】図16は、実施例1において適用される確率オートマトンを説明するための図である。
【図17】図17は、実施例1において適用される確率オートマトンの具体例を示す図である。
【図18】図18は、実施例2における状態判定ユニットの機能的構成を示す図である。
【図19】図19は、実施例1及び2における状態判定ユニットを有する状態判定システムの構成例を示す図である。
【図20】図20は、状態判定システムにおいて、位置管理サーバの有する状態遷移図の一例である。
【図21】図21は、状態判定システムにおいて、複数の状態判定ユニットが設置された環境の地図の一例である。
【図22】図22は、状態判定プログラムを実行するコンピュータを示す図である。
【発明を実施するための形態】
【0011】
以下に、本願の開示する状態判定装置、状態判定方法、及び状態判定プログラムの実施例を、図面を参照しながら詳細に説明する。なお、以下の実施例により本願の開示する状態判定装置及び状態判定方法が限定されるものではない。
【実施例1】
【0012】
以下、本願の開示する状態判定装置の実施例について、図面を参照しながら説明する。以下では、本願の開示する状態判定装置をRFIDにより実現する例について説明する。図1は、実施例1における状態判定の概要を説明するための図である。環境1には、アンテナ固定用のポールP1が設置されている。ポールP1は、タグ読取装置のアンテナA1を所定位置に備える。アンテナA1は、検知エリアB1におけるタグ読取りを可能とする。同様に、環境1のポールP1近傍には、アンテナ固定用のポールP2が、ポールP1に隣接するように設置されている。ポールP2は、上記タグ読取装置のアンテナA2を所定位置に備える。アンテナA2は、検知エリアB2におけるタグ読取りを可能とする。また、アンテナA1,A2の間に位置する境界線C周辺には、検知エリアB1,B2が重なり合う領域B3が形成されている。環境1内に所在する人等の移動体Mには、RFIDのタグ10が貼付されている。
【0013】
まず、本願の開示する一実施例に係る状態判定ユニットの構成を説明する。図2は、本実施例に係る状態判定ユニット100の機能的構成を示す図である。図2に示すように、状態判定ユニット100は、上述のアンテナA1,A2と、アンテナ切替装置101と、読取装置102と、状態判定装置103と、出力部104とを有する。これら各構成部分は、一方向又は双方向に、信号やデータの入出力が可能なように接続されている。
【0014】
アンテナA1,A2は、図1に示した環境1に併設され、同一の周波数帯域を有する。アンテナ切替装置101は、これら周波数帯域の等しいアンテナA1,A2による、異なるエリアでのタグ検知を可能とするため、所定の時間間隔でアンテナA1,A2を切り替える。時間間隔は、例えば50msである。
【0015】
読取装置102は、アンテナA1,A2が検知したタグのIDを、検知したアンテナのIDと併せて、アンテナ切替装置101経由で入力する。そして、読取装置102は、対応付けられたこれらのIDを検知結果として、後段の状態判定装置103に出力する。この出力は、アンテナA1,A2の切替え周期の2倍の時間間隔(例えば、100ms)で行われる。
【0016】
状態判定装置103は、読取装置102から入力されるタグ検知結果を基に、環境1に存在する移動体Mの状態を判定し、判定結果を出力部104に出力する。状態判定装置103は、図2に示すように、取得部113と、記憶部123と、推定部133と、判定部143とを有する。
【0017】
取得部113は、読取装置102の出力したタグ検知結果を取得する。タグ検知結果には、例えば、“A1:タグ10、A2:タグ20”というように、アンテナのIDと、アンテナの検知したタグのIDとが対応付けられている。取得部113は、このタグ検知結果を、推定部133に出力する。
【0018】
記憶部123には、状態遷移確率123aと出力確率123bとが対応付けて記憶されている。状態遷移確率123aは、環境1におけるタグ10の状態の遷移とともに、各状態から他の状態に遷移する確率である。出力確率123bは、各状態においてタグ10の検知または未検知を示す複数の検知情報(出力シンボルk)それぞれが出力される確率である。
【0019】
推定部133は、取得部113から入力されたタグ検知結果を基に、タグ10が現在到達している状態を推定する。すなわち、推定部133は、タグ10について複数の検知情報が順に出力された場合に、記憶部123に記憶された状態遷移確率123a及び出力確率123bの規定された確率オートマトンを用いて、タグ10が到達した状態を推定する。推定部133は、検知情報が検知される度に、タグ10の現在の状態を逐次推定する。推定部133は、状態の推定結果(例えば、後述のS1,S5)を、例えば100ms間隔で、判定部143に出力する。なお、推定部133は、タグ10が別の状態に遷移しなかった場合にも、所定時間の経過に伴い、上記推定結果を出力する。
【0020】
判定部143は、推定部133から入力された検知状態推定結果を基に、対応するタグの付された移動体Mの状態を判定する。判定部143は、通過判定部143a、引返し判定部143b、及び停滞判定部143cを有する。判定部143は、状態種別毎に3つの判定部から構成される。通過判定部143aは、環境1において、移動体Mが通過したか否かの判定を行う。また、引返し判定部143bは、環境1において、移動体Mが引返しをしたか否かの判定を行う。更に、停滞判定部143cは、環境1において、移動体Mが停滞したか否かの判定を行う。停滞判定部143cは、移動体Mが任意の状態に停滞しているか否かを判断するための指標として、カウンタ144cを有する。停滞判定部143cは、カウンタ144cの値が閾値T以上になると、移動体Mが停滞していると判定する。
【0021】
図3は、タグの状態を説明するための状態遷移図である。図3に示すように、環境1におけるタグの状態として、S0〜S8の9つの状態がある。以下、9つの状態が如何なる状態であるか説明する。S0は、タグが未検知の状態である。S1は、タグが検知エリアB1(図1参照)で検知された状態である。S2は、タグが検知エリアB3(図1参照)で検知された状態である。なお、検知エリアB3は、検知エリアB1と検知エリアB2とが重なり合う領域である。S3は、タグが検知エリアB2(図1参照)で検知された状態である。S4は、タグが検知エリアB2を抜けて未検知となった状態である。S5は、S3同様、タグが検知エリアB2(図1参照)で検知された状態である。S6は、S2同様、タグが検知エリアB3(図1参照)で検知された状態である。S7は、S1同様、タグが検知エリアB1(図1参照)で検知された状態である。S8は、タグが検知エリアB1を抜けて未検知となった状態である。
【0022】
図3中の矢印は、状態が遷移する様子を示す。例えば、図3の矢印D1は、タグが状態S1から状態S2に遷移したことを示す。また、矢印D2は、タグが状態S2から状態S1に遷移したことを示す。また、矢印D3は、タグが状態S1に留まっていたこと、すなわち、図1に示したアンテナA1のエリア内にタグが停止していたことを示す。更に、矢印D4,D5は、状態S4,S8がそれぞれタグ未検知の初期状態S0に自動的にリセットされたことを示す。
【0023】
図3において、読取装置102に誤動作が生じない場合、読取装置102によるタグ検知をイベントとして、タグの状態は遷移する。しかし、移動体Mが検知エリアB1に留まっていると、読取装置102からタグ検知結果が取得される度に、「アンテナA1が同一IDのタグを検知している」というイベントが繰り返し発生する。このような状況にも対応するため、状態Sn(nは0〜8の整数)は、イベントを機に自己の状態に戻る自己ループ(例えば、上記矢印D3)を有する。また、移動体MがアンテナA1とアンテナA2との間を往復したり、途中で引き返したりする場合を想定し、各状態Sn(n=0,1,2,3,5,6,7)は、異なる2つの状態間を双方向に遷移可能な経路を有する。
【0024】
出力部104は、判定部143から入力された、移動体Mの状態(通過、引返し、停滞)を判定結果として出力する。
【0025】
なお、図2に示した状態判定装置103は、物理的には、例えばパーソナルコンピュータによって実現される。また、取得部113、推定部133、判定部143は、物理的には、例えばCPU(Central Processing Unit)、あるいはASIC(Application Specific Integrated Circuit)等の集積回路によって実現される。記憶部123は、物理的には、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ等の半導体メモリ素子によって実現される。また、出力部104は、物理的には、例えば液晶ディスプレイ等の表示装置によって実現される。
【0026】
次に、実施例1における状態判定装置103の動作を説明する。
【0027】
まず、図4を参照しながら、推定部133により実行される一連の処理を説明する。図4は、実施例1における推定部133の動作を示すフローチャートである。
【0028】
まず、推定部133は、読取装置102の出力するタグ検知結果を取得する(ステップS1)。このタグ検知結果には、検知されたタグのIDと、これを検知したアンテナのIDとが、少なくとも含まれている。次に、推定部133は、検知されたタグIDについて、タグの状態を推定する(ステップS2)。この推定は、環境におけるタグの状態遷移に対して、状態遷移確率と出力確率とを適用することにより行われる。そして、推定部133は、この推定結果を判定部143に出力する(ステップS3)。
【0029】
ステップS1〜S3の一連のサイクルは、例えば100ms周期等、一定の間隔で繰り返し実行される。
【0030】
続いて、図5〜図15を参照しながら、判定部143の動作を説明する。
【0031】
まず、通過判定処理について説明する。図5は、実施例1における通過判定処理を説明するためのフローチャートである。ステップS10では、判定部143の通過判定部143aは、推定部133から新たな推定結果が入力されるまで待機する。通過判定の対象となるIDのタグが検知されると(ステップS11;Yes)、通過判定部143aは、タグの状態が状態S4に遷移したか否かを判定する(ステップS12)。当該判定の結果、状態S4に遷移した場合(ステップS12;Yes)、通過判定部143aは、環境1において、移動体MがアンテナA1からアンテナA2の方向に「通過」したと判定する(ステップS13)。そして、ステップS10に戻り、それ以降の処理を実行する。
【0032】
一方、ステップS12における判定の結果、状態S4に遷移していない場合(ステップS12;No)、通過判定部143aは、タグが状態S8に遷移したか否かを判定する(ステップS14)。当該判定の結果、状態S8に遷移した場合(ステップS14;Yes)には、通過判定部143aは、環境1において、移動体MがアンテナA2からアンテナA1の方向に「通過」したと判定する(ステップS15)。そして、ステップS10に戻り、それ以降の処理を実行する。
【0033】
また、ステップS14における判定の結果、状態S8に遷移していない場合(ステップS14;No)、通過判定部143aは、環境1において、移動体Mが何れの方向にも通過していない(未通過状態)と判定する(ステップS16)。そして、ステップS10に戻り、それ以降の処理を実行する。なお、ステップS11において、通過判定の対象となるIDのタグが検知されない場合にも(ステップS11;No)、ステップS10に戻り、それ以降の処理を実行する。
【0034】
次に、図6〜図8を参照しながら、引返し判定処理について説明する。図6は、実施例1における引返し判定処理を説明するためのフローチャートである。ステップS20では、判定部143の引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する。引返し判定部143bは、タグの状態が状態S0から状態S1に遷移したか否かを判定する(ステップS21)。当該判定の結果、状態S1に遷移した場合(ステップS21;Yes)には、引返し判定部143bは、後述するサブルーチン1を実行する(ステップS22)。
【0035】
一方、ステップS21における判定の結果、タグが状態S0から状態S1に遷移していない場合(ステップS21;No)、引返し判定部143bは、タグが状態S0(S4がリセットされた状態)から状態S5に遷移したか否かを判定する(ステップS23)。当該判定の結果、状態S5に遷移した場合(ステップS23;Yes)には、引返し判定部143bは、後述するサブルーチン2を実行する(ステップS24)。なお、上記ステップS23における判定の結果、状態S5に遷移していない場合(ステップS23;No)には、ステップS20に戻り、それ以降の処理を実行する。
【0036】
続いて、図7を参照しながら、上述のサブルーチン1(ステップS22)について詳述する。図7は、実施例1における引返し判定処理におけるサブルーチン1を説明するためのフローチャートである。
【0037】
ステップS30では、判定部143の引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する。引返し判定部143bは、タグの状態が状態S1から状態S2に遷移したか否かを判定する(ステップS31)。当該判定の結果、状態S2に遷移した場合(ステップS31;Yes)には、引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する(ステップS32)。引返し判定部143bは、タグの状態が状態S2から状態S1に遷移したか否かを判定する(ステップS33)。当該判定の結果、状態S1に遷移した場合(ステップS33;Yes)には、引返し判定部143bは、推定部133から新たな推定結果が入力されるまで待機する(ステップS34)。引返し判定部143bは、タグの状態が状態S1から状態S0に遷移したか否かを判定する(ステップS35)。当該判定の結果、状態S0に遷移した場合(ステップS35;Yes)には、引返し判定部143bは、移動体Mの状態を「引返し」と判定する(ステップS36)。そして、サブルーチン1は終了する。サブルーチン1の終了後は、ステップS20に戻る(図7のリターン)。
【0038】
なお、ステップS31における判定の結果、状態S1から状態S2に遷移していない場合(ステップS31;No)には、引返し判定部143bは、上述したステップS32〜S34の処理を省略して、ステップS35の処理を実行する。また、ステップS35における判定の結果、状態S1から状態S0に遷移していない場合(ステップS35;No)には、引返し判定部143bは、再びステップS30以降の処理を実行する。
【0039】
また、ステップS33における判定の結果、状態S1に遷移していない場合(ステップS33;No)には、引返し判定部143bは、引き続き、タグの状態が状態S2から状態S3に遷移したか否かを判定する(ステップS37)。当該判定の結果、状態S3に遷移した場合(ステップS37;Yes)には、引返し判定部143bは更に、推定部133から新たな推定結果が入力されるまで待機する(ステップS38)。引返し判定部143bは、タグの状態が状態S3から状態S2に遷移したか否かを判定する(ステップS39)。当該判定の結果、状態S2に遷移していない場合(ステップS39;No)には、引返し判定部143bは更に、タグの状態が状態S3から状態S4に遷移したか否かを判定する(ステップS40)。当該判定の結果、状態S4に遷移した場合(ステップS40;Yes)には、引返し判定部143bは、移動体Mが、検知エリアB1側から検知エリアB2側に「通過」したと判定する(ステップS41)。そして、サブルーチン1は終了する。
【0040】
なお、ステップS37における判定の結果、状態S2から状態S3に遷移していない場合(ステップS37;No)には、引返し判定部143bは、再びステップS32以降の処理を実行する。また、ステップS39における判定の結果、状態S3から状態S2に遷移した場合(ステップS39;Yes)には、引返し判定部143bは、再びステップS32以降の処理を実行する。更に、ステップS40における判定の結果、状態S3から状態S4に遷移していない場合(ステップS40;No)には、引返し判定部143bは、再びステップS38以降の処理を実行する。
【0041】
次に、上述のサブルーチン2(図6に示したステップS24)について説明する。図8は、実施例1における引返し判定処理におけるサブルーチン2を説明するためのフローチャートである。図7では、状態S1〜S4(図3参照)における引返し判定処理を想定したが、図8では、状態S5〜S8(図3参照)における引返し判定処理を想定している。図7及び図8は、状態遷移の方向が反対方向となっている点を除き同一であるため、詳細な説明は省略するが、図8のステップS50〜S56は、図7のステップS30〜S36にそれぞれ対応する。また、図8のステップS57〜S61は、図7のステップS37〜S41にそれぞれ対応する。更に、状態S5〜S8は、状態S1〜S4にそれぞれ対応する。サブルーチン1では、引返し判定部143bは、検知エリアB1側から検知エリアB2側への通過を判定したが(図7のステップS41)、サブルーチン2では、引返し判定部143bは、これとは逆方向の通過を判定する(図8のステップS61)。なお、図8のステップS55における状態S0は、状態S4がリセットされた結果である。
【0042】
次に、図9〜図15を参照しながら、停滞判定処理について説明する。図9は、実施例1における停滞判定処理を説明するためのフローチャートである。ステップS70では、判定部143の停滞判定部143cは、停滞判定用のカウンタ144cを初期化し“C=0”とする。停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する(ステップS71)。停滞判定部143cは、タグの状態が状態S0から状態S1に遷移したか否かを判定する(ステップS72)。当該判定の結果、状態S1に遷移した場合(ステップS72;Yes)には、停滞判定部143cは、後述するサブルーチン3を実行する(ステップS73)。
【0043】
一方、ステップS72における判定の結果、タグが状態S0から状態S1に遷移していない場合(ステップS72;No)、停滞判定部143cは、タグが状態S0(S4がリセットされた状態)から状態S5に遷移したか否かを判定する(ステップS74)。当該判定の結果、状態S5に遷移した場合(ステップS74;Yes)には、停滞判定部143cは、後述するサブルーチン4を実行する(ステップS75)。なお、上記ステップS74における判定の結果、状態S5に遷移していない場合(ステップS74;No)には、ステップS71に戻り、それ以降の処理を実行する。
【0044】
続いて、図10〜図12を参照しながら、上述のサブルーチン3(ステップS73)について詳述する。図10は、実施例1における停滞判定処理におけるサブルーチン3の前半部分を説明するためのフローチャートである。
【0045】
ステップS80では、判定部143の停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する。停滞判定部143cは、タグの状態が状態S1から状態S2に遷移したか否かを判定する(ステップS81)。当該判定の結果、状態S2に遷移した場合(ステップS81;Yes)には、停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する(ステップS82)。停滞判定部143cは、タグの状態が状態S2から状態S1に遷移したか否かを判定する(ステップS83)。当該判定の結果、状態S1に遷移した場合(ステップS83;Yes)には、停滞判定部143cは更に、後述のサブルーチンAを実行する(ステップS84)。
【0046】
また、ステップS81における判定の結果、状態S2に遷移していない場合(ステップS81;No)には、停滞判定部143cは、引き続き、タグの状態が状態S1から状態S0に遷移したか否かを判定する(ステップS85)。当該判定の結果、状態S0に遷移した場合(ステップS85;Yes)には、サブルーチン3は終了する。このサブルーチン3の終了に伴い、一連の停滞判定処理は終了する(図9のエンド)。一方、状態S0に遷移していない場合(ステップS85;No)には、停滞判定部143cは、移動体Mが状態S1に停滞していると判定し、後述のサブルーチンAを実行する(ステップS86)。
【0047】
図11は、実施例1における停滞判定処理におけるサブルーチン3の後半部分を説明するためのフローチャートである。上記ステップS83における判定の結果、状態S1に遷移していない場合(ステップS83;No)には、停滞判定部143cは、移動体Mが状態S2に停滞していると判定し、図11のステップS90以降の処理を実行する。ステップS90では、停滞判定部143cは、タグの状態が状態S2から状態S3に遷移したか否かを判定する。当該判定の結果、状態S3に遷移した場合(ステップS90;Yes)には、停滞判定部143cは、推定部133から新たな推定結果が入力されるまで待機する(ステップS91)。停滞判定部143cは、タグの状態が状態S3から状態S2に遷移したか否かを判定する(ステップS92)。当該判定の結果、状態S2に遷移していない場合(ステップS92;No)には、停滞判定部143cは更に、移動体Mが状態S3に停滞していると判定し、タグの状態が状態S3から状態S4に遷移したか否かを判定する(ステップS93)。当該判定の結果、状態S4に遷移した場合(ステップS93;Yes)には、停滞判定部143cは、移動体Mが、検知エリアB1側から検知エリアB2側に「通過」したと判定する(ステップS94)。そして、サブルーチン3を終了する。このサブルーチン3の終了に伴い、一連の停滞判定処理は終了する(図9のエンド)。
【0048】
また、ステップS90における判定の結果、状態S3に遷移していない場合(ステップS90;No)には、停滞判定部143cは、引き続き、タグの状態が状態S2から状態S1に遷移したか否かを判定する(ステップS95)。当該判定の結果、状態S1に遷移した場合(ステップS95;Yes)には、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS96)。実行後、停滞判定部143cは、図10のステップS80以降の処理を再び実行する。一方、上記ステップS95における判定の結果、状態S1に遷移していない場合(ステップS95;No)には、移動体Mが状態S2に停滞していると判定し、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS97)。そして、停滞判定部143cは、図10のステップS82以降の処理を再び実行する。
【0049】
上記ステップS92における判定の結果、状態S3から状態S2に遷移した場合(ステップS92;Yes)には、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS98)。実行後は、上述のステップS97と同様、停滞判定部143cは、図10のステップS82以降の処理を再び実行する。
【0050】
更に、ステップS93における判定の結果、状態S4に遷移していない場合(ステップS93;No)には、停滞判定部143cは、引き続き、タグの状態が状態S3から状態S2に遷移したか否かを判定する(ステップS99)。当該判定の結果、状態S2に遷移した場合(ステップS99;Yes)には、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS100)。そして、上述のステップS97及びS98と同様、停滞判定部143cは、図10のステップS82以降の処理を再び実行する。一方、上記ステップS99における判定の結果、状態S2に遷移していない場合(ステップS99;No)には、移動体Mが状態S3に停滞していると判定し、停滞判定部143cは、後述のサブルーチンAを実行する(ステップS101)。そして、停滞判定部143cは、上述のステップS91以降の処理を再び実行する。
【0051】
図12は、実施例1における停滞判定処理におけるサブルーチン3のサブルーチンAを説明するためのフローチャートである。図12のステップS110では、判定部143の停滞判定部143cは、停滞判定用のカウンタ144cの値を1つインクリメントする。停滞判定部143cは、カウンタ144cと閾値Tとの大小を比較し(ステップS111)、C≧閾値Tである場合(ステップS111;Yes)には、停滞判定部143cは、移動体Mの状態を「停滞」と判定する(ステップS112)。そして、サブルーチンAは終了する。一方、ステップS111における比較の結果、C<閾値Tである場合(ステップS111;No)には、そのままサブルーチンAを終了する(ステップS113)。
【0052】
次に、上述のサブルーチン4(図9に示したステップS75)について説明する。図13は、実施例1における停滞判定処理におけるサブルーチン4の前半部分を説明するためのフローチャートである。図10では、状態S1〜S4(図3参照)における停滞判定処理を想定したが、図13では、状態S5〜S8(図3参照)における停滞判定処理を想定している。図10及び図13は、状態遷移の方向が反対方向となっている点を除き同一であるため、詳細な説明は省略するが、図13のステップS120〜S126は、図10のステップS80〜S86にそれぞれ対応する。また、状態S5〜S8は、状態S1〜S4にそれぞれ対応する。更に、サブルーチンBは、サブルーチンAと同様の処理である。
【0053】
同様に、図14は図11に対応し、図15は図12に対応する。図14は、実施例1における停滞判定処理におけるサブルーチン4の後半部分を説明するためのフローチャートである。図14のステップS130〜S141は、図11のステップS90〜S101にそれぞれ対応する。サブルーチン3では、停滞判定部143cは、検知エリアB1側から検知エリアB2側への通過を判定したが(図11のステップS94)、サブルーチン4では、停滞判定部143cは、これとは逆方向の通過を判定する(図14のステップS134)。また、図15は、実施例1における停滞判定処理におけるサブルーチン4のサブルーチンBを説明するためのフローチャートである。図15のステップS150〜S153は、図12のステップS110〜S113にそれぞれ対応する。
【0054】
上述したように、状態判定装置103は、一連の引返し判定処理を実行することで、移動体Mが、図3に示した状態S1,S2,S3の何れの状態から引き返した場合にも、引返しの判定を行うことができる。これと同様に、状態判定装置103は、一連の停滞判定処理を実行することで、移動体Mが状態S1,S2,S3の何れの状態に停滞した場合にも対応することができる。
【0055】
以上、動作を説明したが、本実施例における状態判定装置103は、環境1において、読取装置102による誤動作(タグ10の未検知や誤検知)に対応すべく、図16に示す確率オートマトンを用いる。確率オートマトンは、例えば、隠れマルコフモデル(HMM:Hidden Markov Model)である。図16は、実施例1において適用される確率オートマトンを説明するための図である。図16において、“aij”は、状態Siから状態Sjへの遷移確率を表す。また、“bi(k)”は、状態Siにおいてシンボルkを出力する確率を表す。また、“k”は、対応する検知エリア内においてタグが検知されたという出力シンボルを表す。例えば、検知エリアB1内にタグ10が検知されたときの出力シンボルは“k=A1”であり、検知エリアB2内にタグ10が検知されたときの出力シンボルは“k=A2”である。また、検知エリアB3内にタグ10が検知されたときの出力シンボルは“k=A12”であり、何れの検知エリアにおいてもタグ10が検知されないとき(未検知)の出力シンボルは“k=Non”である。したがって、例えば、b1(A1)は、状態S1において、検知エリアB1内でタグが検知されたと出力する確率を示し、b2(A12)は、状態S2において、検知エリアB3内でタグが検知されたと出力する確率を示す。また、b3(Non)は、状態S3において、何れの検知エリアにもタグが検知されていないと出力する確率を示す。
【0056】
上記確率オートマトンを用いることで、例えば、状態S1において、それぞれの検知エリア内でタグが検知されたというシンボルを出力確率は、“b1(A1)=0.8”、“b1(A2)=0.05”、“b1(A12)=0.05”、“b1(Non)=0.1”のように表される。これにより、アンテナA1の検知エリアB1内にタグがあるにも拘らず、検知エリアB3内にタグがあると検知(誤検知)される確率b1(A12)が、0.05と定義される。同様に、アンテナA1の検知エリアB1内にタグがあるにも拘らず、検知されない(未検知の)確率b1(Non)は、0.1と定義される。
【0057】
確率オートマトンを用いることで、以下に説明するような状態推定が可能となる。読取装置102による、あるIDのタグの初回検知から最新検知までの時系列の検知データを「観測シンボルy」と表す。例えば、タグ10について、読取装置102が「未検知」、「アンテナA1で検知」、「アンテナA1で検知」、「アンテナA2で検知」の順に検知した場合、観測シンボルは、y=Non A1 A1 A2という時系列データとなる。図16に示した確率オートマトンにおいて、このような観測シンボルyが与えられたときに状態Si(iは0〜8の整数)となる確率は、p(Si│y)によって表される。状態判定装置103の推定部133は、タグ10について、ある観測シンボルyが与えられたとき、全ての状態Siについてp(Si│y)を算出し、最も確率の高い状態Siを求めることで、タグ10の現在の状態を推定する。例えば、p(Si│y)のうち、p(S4│y)が最大となった場合、推定部133は、タグ10が状態S4に到達したと推定する。そして、判定部143は、上述した通過判定処理を実行することにより、タグ10の付された移動体Mが、検知エリアB1から検知エリアB2に向かう方向に通過したと判定する。
【0058】
図17は、各状態S0〜S4について、実施例1において適用される確率オートマトンの具体例を示す図である。図17において、状態S1〜S3内に示す数値は、各状態におけるシンボルkの出力確率である。例えば、状態S1では、A1,A2,A12,Non(未検知)を出力する確率はそれぞれ0.5,0.1,0.3,0.1である。また、各状態S0〜S4間を結ぶ矢印に付された数値は、状態遷移確率を表す。例えば、状態S1から状態S1に遷移(自己ループ)する確率は0.4、状態S1から状態S0に遷移する確率は0.3、状態S1から状態S2に遷移する確率は0.3である。
【0059】
以下、推定部133が、タグ10に関する特徴ベクトル(A1,A12,A2,Non)を観測した場合を想定し、タグ10の到達した状態(遷移先)を推定する方法について説明する。タグ10の到達状態として最も確率の高い状態は、以下のように算出される。特徴ベクトルが入力されてS0に到達した状態をω0とする。同様に、S1に到達した状態をω1、S2に到達した状態をω2、S3に到達した状態をω3、S4に到達した状態をω4とする。初期状態がS0のとき、特徴ベクトルが観測されてS1→S1→S1→S0と遷移した場合における確率は、以下のように算出される。
【0060】
p(A1│S1)×p(S1→S1)×p(A12│S1)×p(S1→S1)×p(A2│S1)×p(S1→S0)=0.5×0.4×0.3×0.4×0.1×0.3=0.00072
【0061】
ここで、p(A1│S1)は、状態S1においてA1を観測したと出力される確率(出力確率)であり、p(S1→S1)は、状態S1から状態S1に遷移する確率(状態遷移確率)である。
【0062】
S1→S1→S1→S0以外の状態遷移についても同様に、特徴ベクトル(A1,A12,A2,Non)が観測されたときに到達する可能性のある全ての状態について、上記確率を算出すると、以下のようになる。
【0063】
S1→S2→S1→S0と遷移した場合の確率は0.000675
S1→S1→S1→S1と遷移した場合の確率は0.000096
S1→S1→S2→S1と遷移した場合の確率は0.000135
S1→S2→S1→S1と遷移した場合の確率は0.00009
S1→S2→S2→S1と遷移した場合の確率は0.000225
S1→S1→S1→S2と遷移した場合の確率は0.00072
S1→S1→S2→S2と遷移した場合の確率は0.00018
S1→S2→S1→S2と遷移した場合の確率は0.0000675
S1→S2→S2→S2と遷移した場合の確率は0.0003
S1→S2→S3→S2と遷移した場合の確率は0.0003375
S1→S1→S2→S3と遷移した場合の確率は0.000135
S1→S2→S2→S3と遷移した場合の確率は0.000225
S1→S2→S3→S3と遷移した場合の確率は0.00045
S1→S2→S3→S4と遷移した場合の確率は0.003375
【0064】
これらは、同時に起こり得ない独立事象であるので、ω0〜ω4となる確率は、それぞれ以下のように算出される。
【0065】
p(A1,A12,A2,Non│ω0)=0.00072+0.000675=0.001395
p(A1,A12,A2,Non│ω1)=0.00096+0.000135+0.00009+0.000225=0.000546
p(A1,A12,A2,Non│ω2)=0.000072+0.00018+0.0000675+0.0003+0.0003375=0.000957
p(A1,A12,A2,Non│ω3)=0.000135+0.000225+0.00045=0.00081
p(A1,A12,A2,Non│ω4)=0.003375
【0066】
上記ω0〜ω4の事前確率は等しいことから、p(ω0)=p(ω1)=p(ω2)=p(ω3)=p(ω4)=0.2となる。
【0067】
したがって、特徴ベクトル(A1,A12,A2,Non)が観測された場合における最も確率の高い到達状態は、ベイズの定理より、以下のように求められる。
【0068】
p(ω0│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω0)×p(ω0)=0.000279
p(ω1│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω1)×p(ω1)=0.000109
p(ω2│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω2)×p(ω2)=0.000191
p(ω3│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω3)×p(ω3)=0.000162
p(ω4│A1,A12,A2,Non)=p(A1,A12,A2,Non│ω4)×p(ω4)=0.000675
【0069】
以上より、推定部133は、図17の確率オートマトンにおいて、特徴ベクトル(A1,A12,A2,Non)が観測された際、タグ10が最も到達する確率の高い状態を、状態S4と推定する。
【0070】
なお、上記説明では、状態S0〜S4(図3の上側)について、確率オートマトンを用いた推定方法について説明したが、推定部133は、状態S0及び状態S5〜S8(図3の下側)についても同様の算出手法により、タグ10の到達状態を推定することができる。
【0071】
上述してきたように、本実施例における状態判定装置103は、記憶部123と推定部133と判定部143とを有する。記憶部123には、状態遷移確率123aと出力確率123bとが対応付けて記憶される。状態遷移確率123aは、環境1におけるタグ10の状態の遷移とともに、各状態S0〜S8から他の状態に遷移する確率である。出力確率123bは、各状態S0〜S8においてタグ10の検知または未検知を示す複数のシンボルkそれぞれが出力される確率である。推定部133は、タグ10について複数のシンボルkが順に出力された場合に、記憶部123に記憶された状態遷移確率123a及び出力確率123bを用いて、タグ10が到達した状態を推定する。判定部143は、推定部133により推定された状態に基づき、タグ10の通過を判定する。状態判定装置103は、状態遷移確率123aと出力確率123bとが規定された確率オートマトンを用いて、状態S0〜S8の中から、人が到達した確率が最も高い状態を求め、その状態から人の通過を判定する。換言すれば、状態判定装置103は、タグ10の未検知や誤検知といった誤動作までも考慮して、状態の推定を行う。したがって、状態判定装置103は、誤動作が生じた場合でも最も高い確率で、タグ10を所持する移動体Mの状態推定を行うことができる。その結果、状態判定の精度が向上する。
【0072】
本実施例における状態判定装置103は、図3、図16あるいは図17に示したような、自己ループと2つの状態間を双方向に遷移可能な経路とを有する状態遷移図を用いて、タグの検知をイベントとする状態遷移により、タグの状態を推定する。このため、状態判定装置103は、読取装置102の誤動作の発生パターンに合わせて、タグの状態を判別するためのパターンテーブルを無数に用意する必要がない。つまり、状態判定装置103は、確率オートマトンを用いることにより、タグが到達した状態の推定を簡易な構成で行うことができる。
【0073】
更に、本実施例における状態判定装置103によれば、判定部143は、推定部133により推定された状態に基づき、タグ10の引返し、停滞を判定する。これにより、状態判定装置103は、タグ10の到達状態ひいては移動体Mの状態として、通過のみならず、引返しや停滞をも判定することができる。したがって、状態判定装置103は、移動体Mが検知エリアを通過することなく途中で戻った場合、あるいは、移動体Mが検知エリア近傍に立ち止っている場合にも、その事を精度良く判定することができる。その結果、移動体Mの挙動を、より詳細かつ高精度に把握することが可能となる。
【実施例2】
【0074】
次に、実施例2における状態判定ユニットの構成について説明する。図18は、実施例2における状態判定ユニットの機能的構成を示す図である。図18は、本実施例に係る状態判定ユニット200の機能的構成を示す図である。図18に示すように、状態判定ユニット200は、上述のアンテナA1,A2と、アンテナ切替装置201と、読取装置202と、状態判定装置203と、出力部204とを有する。これら各構成部分は、一方向又は双方向に、信号やデータの入出力が可能なように接続されている。
【0075】
状態判定装置203は、読取装置202から入力されるタグ検知結果を基に、環境1に属する移動体Mの状態を判定し、判定結果を出力部204に出力する。状態判定装置203は、図18に示すように、取得部213と、記憶部223と、推定部233と、判定部243と、調整部253とを有する。記憶部223は、状態遷移確率223a及び出力確率223bを記憶する。判定部243は更に、通過判定部243aと、引返し判定部243bと、カウンタ244cを有する停滞判定部243cとを有する。
【0076】
状態判定ユニット200は、調整部253を更に有する点を除き、実施例1における状態判定ユニット100と同様の構成を有する。したがって、同様の構成要素には、末尾が同一の参照符号を付すとともに、その詳細な説明は省略する。具体的には、実施例2におけるアンテナ切替装置201と、読取装置202と、状態判定装置203と、出力部204とは、実施例1におけるアンテナ切替装置101と、読取装置102と、状態判定装置103と、出力部104とにそれぞれ対応する構成要素である。また、実施例2における取得部213と、記憶部223と、推定部233と、判定部243とは、実施例1における取得部113と、記憶部123と、推定部133と、判定部143とにそれぞれ対応する。更に、実施例2における記憶部223の状態遷移確率223a及び出力確率223bは、実施例1における状態遷移確率123a及び出力確率123bにそれぞれ対応する。また、実施例2における判定部243の通過判定部243aと、引返し判定部243bとは、実施例1における判定部143の通過判定部143aと、引返し判定部143bとにそれぞれ対応する構成要素である。そして、実施例2におけるカウンタ244cを有する停滞判定部243cは、実施例1におけるカウンタ144cを有する停滞判定部143cに対応する構成要素である。
【0077】
以下、実施例1との主要な差異である調整部253について説明する。調整部253は、確率オートマトン(図16、図17参照)におけるパラメータを学習する。調整部253は、環境1の変化に対応して、上述の状態遷移確率と上述の出力確率とを、環境1に適した値(パラメータ)に自動的に調整する。パラメータの学習には、例えば、隠れマルコフモデルのパラメータ学習法であるBaumWelchアルゴリズムを用いることができる。
【0078】
実施例2における状態判定ユニット200は、実施例1における状態判定ユニット100の奏する効果に加えて、更に以下のような効果を奏する。すなわち、環境1に設置されたアンテナA1,A2付近に新たな物が置かれたり、既存の物の置かれ方が変わったりすると、電波の遮蔽やマルチパスの影響により、読取装置202に誤動作が生じる場合がある。実施例2における状態判定ユニット200によれば、状態判定装置203の調整部253は、このような環境1の変化に合わせて、既存の状態遷移確率、出力確率といったパラメータを適宜更新する。これにより、パラメータが常に最適な値にチューニングされる。したがって、状態判定装置203は、環境1が変化しても、タグ10の到達する状態を精度良く推定することができる。その結果、環境の変化に対してロバストな状態判定が実現される。
【0079】
実施例2における状態判定ユニット200によれば、調整部253は、初期値として設定された状態遷移確率及び出力確率の値(パラメータ)を、観測シンボルyの付与により、その観測結果が反映された値に修正していく。パラメータは、到達状態として最も確率の高い状態が推定される度に、自律的に随時更新される。状態遷移確率や出力確率は、事前に統計的な予測が可能であるが、例えば、アンテナの周辺に遮蔽物が置かれて電波反射の仕方が変わったときには、これに伴い、状態遷移確率や出力確率も変動する。調整部253は、隠れマルコフモデルによる学習効果で、これらの確率の値を環境に合わせて自動的に調整する。この調整に際しては、例えば、上記のBaumWelchのアルゴリズムを適用することができる。これにより、タグの到達した状態について、環境の変化によらず、最適な推定が可能となる。
【0080】
続いて、実施例1及び2における状態判定ユニット100,200を有して構成される状態判定システムEについて説明する。図19は、実施例1及び2における状態判定ユニットを有する状態判定システムの構成例を示す図である。図19に示すように、状態判定システムEは、状態判定ユニット100,200と、これと同様の構成を有する状態判定ユニット100,200−2〜状態判定ユニット100,200−n(nは自然数)とを有する。これらの状態判定ユニット100,200及び100,200−2〜nは、ネットワークNを介して相互に情報の送受信が可能なように接続されている。同じネットワークNには、位置管理サーバE1、タグデータベースE2、地図データベースE3、及び位置表示装置E4が接続されている。
【0081】
状態判定システムEでは、状態判定ユニット100,200及び100,200−2〜nは、所定の環境において、タグを介した人の状態判定を行うのに適した場所に設置される。状態判定ユニット100,200及び100,200−2〜nによる状態判定結果は、位置管理サーバE1に収集される。
【0082】
図20は、状態判定システムEにおいて、位置管理サーバE1の有する状態遷移図の一例である。位置管理サーバE1は、状態判定ユニット100,200及び100,200−2〜nから送信された状態判定結果の受信をイベントして、図20に示すような状態遷移図から、タグの付された移動体の所在を判定する。タグデータベースE2には、タグのIDと、対応するタグの貼付された移動体の情報(識別番号、氏名など)とが対応付けられている。この対応付けにより、移動物としてのタグの状態判定を行うことで、移動体の状態判定が可能となる。
【0083】
地図データベースE3には、図20に示した状態遷移図に対応する地図データが格納されている。図21は、状態判定システムEにおいて、9つの状態判定ユニット100,200及び100,200−2〜9が設置された環境の地図Fである。図21に示すように、例えば、部屋R1,R2との境界上のドアには、状態判定ユニット100,200が設置されている。なお、図21の部屋R1,R2はそれぞれ、図1に示した検知エリアB2,B1に対応する。これにより、状態判定システムEは、部屋R1と部屋R2との間を行き来する人の状態(通過、引返し、停滞)を判定することができる。また、階段と廊下との境界に位置する状態判定ユニット100,200−7により、階段を上がり終わって廊下に着いた人、あるいはこれから階段を下る人の状態判定が可能となる。更に、エレベータの出入り口付近には、状態判定ユニット100,200−8が設置されているため、エレベータを昇降する人の状態(一旦降りて再び乗る、エレベータを待っている等)を判定することができる。
【0084】
位置表示装置E4は、位置管理サーバE1、タグデータベースE2、及び地図データベースE3のそれぞれから送信される情報を基に、誰が何処にいるかを可視化する。すなわち、位置表示装置E4は、位置管理サーバE1からタグの状態判定結果を受信すると、タグデータベースE2を参照して当該タグの付された人物を特定し、その状態を、地図データベースE3から読み出した地図F上に表示する。地図F上には、移動体の状態と併せて、人物を識別可能な氏名や番号、記号等が表示されるため、利用者は、判定対象の誰がいま何処に所在するのか(現在地)を一目で把握することができる。上記状態判定結果は、環境に適応した確率オートマトンにより得られたものであるため、表示情報は、未検知や誤検知の影響の少ない正確な情報となる。
【0085】
同じ環境内でも、場所によって、物の置かれ方やアンテナの電波強度は異なるが、上述のように、1つの環境に複数の状態判定ユニットを設置することで、同じ環境内における周辺状況の相違にも木目細やかに対応することができる。また、確率オートマトンを用いずに状態判定を行うと、アンテナの設置箇所によって、状態判定の精度にバラつきが生じ易いが、本実施例では、状態遷移確率と出力確率とを用いた演算により、相対的に最も確率の高い状態が到達状態と推定される。したがって、複数の状態のうち、少しでも他の状態よりも高確率のものがあれば、その状態が到達状態として浮上することになる。これにより、アンテナの設置箇所による精度のバラつきは低減される。
【0086】
[状態判定プログラム]
上記実施例で説明した状態判定装置103,203の各種の処理は、予め用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータシステムで実行することによって実現することもできる。そこで、以下では、図22を用いて、上記の実施例で説明した状態判定装置103,203と同様の機能を有する状態判定プログラムを実行するコンピュータの一例について説明する。図22は、状態判定プログラムを実行するコンピュータを示す図である。
【0087】
図22に示すように、上記実施例におけるコンピュータ300は、CPU(Central Processing Unit)310と、ROM(Read Only Memory)320と、HDD(Hard Disk Drive)330と、RAM(Random Access Memory)340とを有する。これら300〜340の各部は、バス400を介して接続される。
【0088】
ROM320には、上記実施例で示す取得部113,213と、推定部133,233と、判定部143,243と、調整部253と同様の機能を発揮する状態判定プログラムが予め記憶される。すなわち、ROM320には、図22に示すように、状態判定プログラム320aが記憶される。なお、状態判定プログラム320aについては、適宜分離してもよい。
【0089】
そして、CPU310が、状態判定プログラム320aをROM320から読み出して実行する。
【0090】
そして、HDD330には、状態遷移確率330aと出力確率330bとが格納される。状態遷移確率330a、及び出力確率330bは、図2に示した状態遷移確率123a、及び出力確率123bに、それぞれ対応する。
【0091】
そして、CPU310は、状態遷移確率330a及び出力確率330bを読み出す。そして、CPU310は、これらをRAM340に記憶させる。CPU310は、RAM340に記憶された状態遷移確率340a及び出力確率340bを用いて、状態判定プログラム320aを実行する。また、CPU310は、RAM340に記憶された状態遷移確率340a及び出力確率340bを用いて、状態判定プログラム320aを実行する。なお、RAM340に記憶される各データ(状態遷移確率340a及び出力確率340b)は、常に全てのデータがRAM340に記憶される必要はなく、処理に必要なデータのみがRAM340に一時記憶されればよい。
【0092】
なお、状態判定プログラム320aは、必ずしも最初からHDD330に記憶させておく必要はない。
【0093】
例えば、コンピュータ300は、コンピュータ300に挿入されるフレキシブルディスク(FD)、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」にプログラムを記憶させておく。そして、コンピュータ300が、これらの媒体からプログラムを読み出して実行するようにしてもよい。
【0094】
さらには、公衆回線、インターネット、LAN、WANなどを介してコンピュータ300に接続される「他のコンピュータ(またはサーバ)」などにプログラムを記憶させておく。そして、コンピュータ300がこれらからプログラムを読み出して実行するようにしてもよい。
【0095】
なお、上記実施例では、本願の開示する状態判定装置をRFIDタグにより実現する例について説明したが、通信方式はこれに限定されるものではない。例えば、赤外線通信を用いてもよい。すなわち、環境側に赤外線受光器を設置し、移動体側に赤外線発光器を持たせ、移動体が受光器の検知エリア内に入った時点で、移動物としての発光器の発信するID信号を受光器が受信するシステムであってもよい。また、通信方式は、無線に限らず、有線通信でもよい。
【0096】
上記実施例では、環境に設置されるアンテナを2箇所としたが、3箇所以上であってもよい。また、上記実施例では、複数のアンテナの電波到達範囲(検知エリア)が重なることを前提として説明したが、これらは重ならなくてもよい。
【0097】
以上の実施例1、2を含む実施形態に関し、さらに以下の付記を開示する。
【0098】
(付記1)環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とを対応付けて記憶する記憶部と、
前記移動物について複数の検知情報が順に出力された場合に、前記記憶部に記憶された状態遷移確率及び出力確率を用いて、前記移動物が到達した状態を推定する推定部と、
前記推定部により推定された状態に基づき、前記移動物の通過を判定する判定部と、
を有することを特徴とする状態判定装置。
【0099】
(付記2)前記判定部は、前記推定部により推定された状態に基づき、前記移動物の引返し、停滞を判定することを特徴とする付記1に記載の状態判定装置。
【0100】
(付記3)前記環境の変化に応じて、前記状態遷移確率と前記出力確率とを調整する調整部を更に有することを特徴とする付記1または2に記載の状態判定装置。
【0101】
(付記4)コンピュータが実行する状態判定方法であって、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
ことを特徴とする状態判定方法。
【0102】
(付記5)コンピュータに、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
処理を実行させることを特徴とする状態判定プログラム。
【符号の説明】
【0103】
1 環境
10 タグ
100,200 状態判定ユニット
100,200−2〜n 状態判定ユニット
102,202 読取装置
103,203 状態判定装置
113,213 取得部
123 記憶部
123a,223a 状態遷移確率
123b,223b 出力確率
133,233 推定部
143,243 判定部
143a,243a 通過判定部
143b,243b 引返し判定部
143c,243c 停滞判定部
144c,244c カウンタ
104,204 出力部
253 調整部
300 コンピュータ
310 CPU
320 ROM
320a 状態判定プログラム
330 HDD
340 RAM
330a,340a 状態遷移確率
330b,340b 出力確率
400 バス
A1,A2 アンテナ
B1,B2,B3 検知エリア
E 状態判定システム
E1 位置管理サーバ
E2 タグデータベース
E3 地図データベース
E4 位置表示装置
M 移動体
N ネットワーク
S0,S1,S2,S3,S4,S5,S6,S7,S8 状態
【特許請求の範囲】
【請求項1】
環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とを対応付けて記憶する記憶部と、
前記移動物について複数の検知情報が順に出力された場合に、前記記憶部に記憶された状態遷移確率及び出力確率を用いて、前記移動物が到達した状態を推定する推定部と、
前記推定部により推定された状態に基づき、前記移動物の通過を判定する判定部と、
を有することを特徴とする状態判定装置。
【請求項2】
前記判定部は、前記推定部により推定された状態に基づき、前記移動物の引返し、停滞を判定することを特徴とする請求項1に記載の状態判定装置。
【請求項3】
前記環境の変化に応じて、前記状態遷移確率と前記出力確率とを調整する調整部を更に有することを特徴とする請求項1または2に記載の状態判定装置。
【請求項4】
コンピュータが実行する状態判定方法であって、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
ことを特徴とする状態判定方法。
【請求項5】
コンピュータに、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
処理を実行させることを特徴とする状態判定プログラム。
【請求項1】
環境における移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記移動物の検知または未検知を示す複数の検知情報それぞれが出力される確率である出力確率とを対応付けて記憶する記憶部と、
前記移動物について複数の検知情報が順に出力された場合に、前記記憶部に記憶された状態遷移確率及び出力確率を用いて、前記移動物が到達した状態を推定する推定部と、
前記推定部により推定された状態に基づき、前記移動物の通過を判定する判定部と、
を有することを特徴とする状態判定装置。
【請求項2】
前記判定部は、前記推定部により推定された状態に基づき、前記移動物の引返し、停滞を判定することを特徴とする請求項1に記載の状態判定装置。
【請求項3】
前記環境の変化に応じて、前記状態遷移確率と前記出力確率とを調整する調整部を更に有することを特徴とする請求項1または2に記載の状態判定装置。
【請求項4】
コンピュータが実行する状態判定方法であって、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
ことを特徴とする状態判定方法。
【請求項5】
コンピュータに、
環境における移動物について、各状態において前記移動物の検知または未検知を示す複数の検知情報が順に出力された場合に、前記移動物の状態の遷移とともに、各状態から他の状態に遷移する確率である状態遷移確率と、各状態において前記複数の検知情報それぞれが出力される確率である出力確率とを用いて、前記移動物が到達した状態を推定し、
推定された状態に基づき、前記移動物の通過を判定する
処理を実行させることを特徴とする状態判定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】

【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−118719(P2012−118719A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−267284(P2010−267284)
【出願日】平成22年11月30日(2010.11.30)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年11月30日(2010.11.30)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]