
状態変化検出装置および状態変化検出プログラム
【課題】監視対象の状態ベクトルを用い、F検定で状態変化を検出する方法では、観測対象が状態を変えてから観測者がその変化を検出するまでに多くの時間を要した。
【解決手段】監視対象の観測値と推定観測値との残差を計算し、監視対象が状態を変えていないモデルと、監視対象が状態を変えているモデルを定式化し、両者のAIC(赤池情報量規準)を演算して、AICが小さい側のモデルを、より尤もらしいと判断することで、短時間でも監視対象の状態変化を検出する事が可能となる。
【解決手段】監視対象の観測値と推定観測値との残差を計算し、監視対象が状態を変えていないモデルと、監視対象が状態を変えているモデルを定式化し、両者のAIC(赤池情報量規準)を演算して、AICが小さい側のモデルを、より尤もらしいと判断することで、短時間でも監視対象の状態変化を検出する事が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、状態変化検出装置および状態変化検出プログラムに係り、監視対象の状態を時間的あるいは空間的に連続して観測することにより、監視対象の状態変化検出する状態変化検出装置および状態変化検出プログラムに関する。
【背景技術】
【0002】
特許文献1には、目標運動解析方法において、目標体の変針、変速等のマニューバの有無の判定を、観測量時系列に対する正規化予測残差に一次回帰式をあてはめて回帰式の係数を推定し、推定された係数で表現された回帰式の有意性検定により、正規化予測残差のバイアスの有無を判定して行う方法が記載されている。
【0003】
特許文献1記載の目標運動解析方法は、目標体の状態ベクトルXの要素である針路、速度の変化を検出する方法である。目標体から放射された音響信号を、観測者が保有する音響センサで受信し、この目標体から観測される時系列方位データと時系列周波数データから、目標体が等速直線運動を行うという仮定の下、目標体の状態ベクトルXを推定する。このようにして求めた状態ベクトルXから推定される観測値と実際に観測された観測値の残差を予測残差として算出し、さらに観測値それぞれの分散を考慮して正規化し、正規化予測残差を算出する。正規化予測残差は目標体が等速直線運動を行っている場合には、正規化予測残差系列に対する1次回帰式の傾きは0となるが、針路、速度の変化がある場合には傾きを持ち、正規化予測残差に偏りが生じる。この偏りをF検定により検出するのが特許文献1の方法である。すなわち正規化予測残差のF値と危険率αのF分布表の値Fα(1,m−2)を比較し、F>Fα(1,m−2)の時に目標体の針路、速度に変化があったと検出する。ここで、mはF検定に用いる正規化予測残差のデータ数である。
【0004】
図1および図2を用いて、上述した背景技術を簡単に説明する。ここで、図1は観測体と目標体の移動シナリオを説明する図である。図2は正規化予測残差の変化を説明する図である。
【0005】
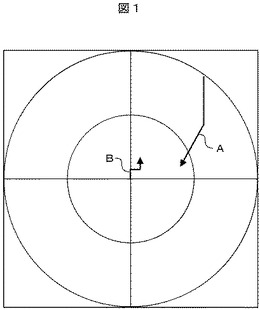
図1において、目標体の初期位置は観測体からみて25°方向、距離20[kyd](18.3km)である。目標体は、矢印Aに示すように、900秒間180°方向に等速直進運動をした後に、210°方向に針路を変えて、再び等速直進運動をしている。また、観測体は矢印Bに示す運動をしている。
【0006】
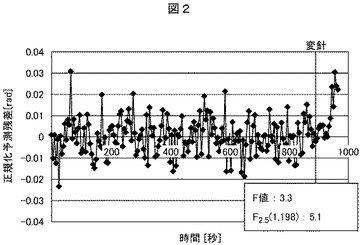
図2は、目標体を発見してから、目標体が0〜900[秒]まで等速直進運動し、900[秒]に30[度]変針し、目標体が再び等速直進運動を開始してから65秒後までの正規化予測残差である。965秒時点のF値は3.3、危険率2.5%のF分布表の値F2.5(1,198)は5.1であり、目標体の変針を検出できていない。このように、特許文献1記載の方法では状態が変化した直後、充分に観測データが得られていない状態では、その変化を検出することができない。
特許文献2には、Marqurdt法に基づいて目標体の運動ベクトルを推定する技術が記載されている。
【0007】
【特許文献1】特開平10−062507号公報
【特許文献2】特開2005−017032号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
目標体の状態ベクトルの変化を検出するとき、状態変化後、目標体の状態変化を検出するまでに時間がかかるという問題点があった。
【課題を解決するための手段】
【0009】
上記の課題は、監視対象を連続的に観測して構築される観測データベースと、この観測データベースを基に監視対象の状態を推定する状態推定部と、この状態推定部が推定した推定観測値と観測データベースの比較により監視対象の状態が変化したか否かを判定する状態変化監視部とを有し、状態変化監視部は、状態推定部によって推定される推定観測値と観測データベースに格納されている実際の観測データから計算される残差に対して、監視対象の状態が変化していないと仮定したモデル関数のAICと、監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、その差により監視対象の状態が変化したか否かを判定する状態変化検出装置により、解決できる。
【0010】
また、コンピュータを、監視対象の連続観測で構築された観測データベースを基に監視対象の状態を推定する状態推定部、および状態推定部によって推定される推定観測値と観測データベースに格納されている実際の観測データから計算される残差に対して、監視対象の状態が変化していないと仮定したモデル関数のAICと、監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、その差により監視対象の状態が変化したか否かを判定する状態変化監視部、として機能させる状態変化検出プログラムにより、解決できる。
【発明の効果】
【0011】
本発明によれば、短時間でも監視対象の状態変化を検出する事が可能な、状態変化検出装置および状態変化検出プログラムを提供できる。
【発明を実施するための最良の形態】
【0012】
以下本発明の実施の形態について、実施例を用い図3ないし図8を用いて詳細に説明する。なお、実質同一部位には同じ参照番号を振り、説明は繰り返さない。ここで、図3は状態変化検出装置の機能ブロック図である。図4は状態変化検出装置のハードウェアブロック図である。図5は状態が変化していない場合の目標体と観測体の関係を示した図である。図6は状態が変化した場合の目標体と観測体の関係を示した図である。図7は状態変化検出装置の処理フローチャートである。図8はモデル間のAIC差の変化を説明する図である。
【0013】
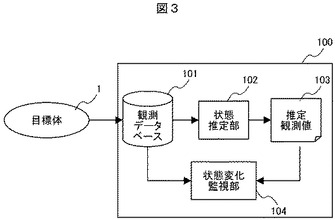
図3において、状態変化検出装置100は、観測データベース101、状態推定部102、推定観測値103、状態変化監視部104から構成されている。状態変化検出装置100の観測データベース101には、目標体1の観測結果を時々刻々蓄積する。
【0014】
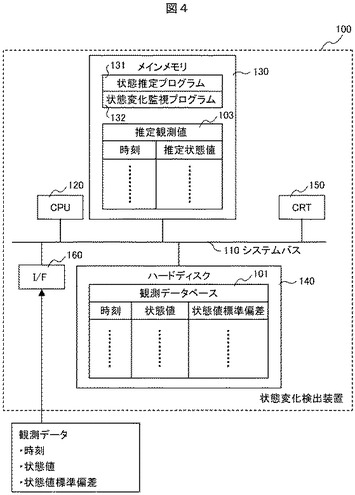
図4において、状態変化検出装置100は、システムバス110に接続された中央演算装置(CPU)120、メインメモリ130、ハードディスク装置140、表示装置(CRT)150、インターフェース160とから構成される。インターフェース160には、時刻、状態値、状態値標準偏差を含む観測データが入力され、ハードディスク装置140に観測データベース101として、記録される。なお、時刻は、状態変化検出装置100の図示しない内部時計から取得しても良い。メインメモリ130には、状態推定プログラム131と、状態変化監視プログラム132と、推定観測値103とが、記録される。
【0015】
図4から明らかなように、状態変化検出装置100は、コンピュータであり、状態推定プログラム131と、状態変化監視プログラム132とは、そのプログラムを実行することにより、コンピュータを、状態推定部102と、状態変化監視部104として、機能させる。
【0016】
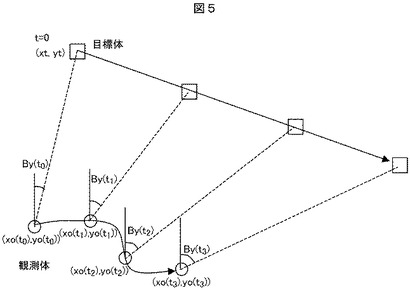
図5および図6は目標体と観測体の関係を示した図であり、監視対象である目標体から放射される音響信号の方位を連続的に観測し、観測データベースを構築する。このとき、観測値は正規分布に従ったノイズ成分を含んでいる。
【0017】
状態推定部においては、観測値を目標体が等速直線運動をしている仮定の下で(1)式でモデル化する。
【0018】
【数1】

【0019】
ここで、目標体の状態は目標体の初期位置座標xt,yt、速力成分vx,vyの4つの係数で表される。状態推定部は最尤法に基づく最適化手法により、観測値と(1)式から計算される推定観測値の残差を最小化する係数xt,yt,vx,vyを推定する。従って、目標体が実際に等速直線運動をしている場合は、残差は(2)式のノイズ成分のみとなる。
【0020】
【数2】
【0021】
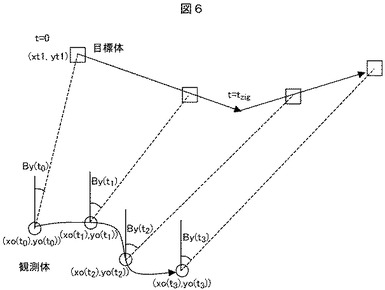
しかし、図6に示すようにt=tzigに係数vx,vyが変化した場合、観測される方位は次式に従う。
【0022】
【数3】
【0023】
ここで、vx1,vx2は目標体の状態変化前の速力成分、vx2,vy2は状態変化後の速力成分を表し、tzigは状態変化時刻を表している。また、εは観測値が含むノイズ成分である。
【0024】
従って、観測値と(1)式から推定される推定観測値の残差は(4)式に示すような非線形関数となり、残差がノイズ成分によるものか(4)式によるものかを状態変化監視部104で判定することにより、目標体の状態変化を検出することが可能となる。
【0025】
【数4】
【0026】
すなわち、観測値と状態推定が出力する推定観測値の時系列残差データが目標体の状態が変化していない場合のモデル関数である(2)式に近いのか、目標体がある時刻tzigで状態が変化した場合のモデル関数(4)式に近いのかを判定する。
【0027】
状態変化監視部104において、観測値と状態推定部102が出力する推定観測値の時系列残差データに(2)式と目標体の状態が変化したと仮定した場合の関数の自由度と同じ次数の多項式で関数の当てはめを行い、その結果得られる当てはめ関数と時系列残差データの差分からAIC(Akaike's Information Criteria:赤池の情報量規準)を計算し、それぞれのAICの比較を行う。その結果、(4)式を多項式近似した関数を当てはめた場合のAICの方が小さければ、目標体の状態が変化したと判定する。ここで、AICとは、観測値と理論値の差(残差)を評価する統計量であり、AICが小さい方が当てはまり具合が高い。
【0028】
なお、(2)式および(4)式は目標体の状態が変化した場合の観測方位関数および残差関数の一例であり、目標体の状態が変化したと仮定した場合の関数の自由度は目標体が状態を変化させる回数や状態推定部の出力結果に依存するため、(2)式の当てはめ結果から得られるAICと目標体が状態を変化させた場合に考え得る関数の自由度全ての多項式で当てはめを行い、AICを比較する。
【0029】
また、状態推定部が推定する係数xt、yt、vx、vyの推定誤差を考慮して、(2)式に当てはめた際のAICに微小な値を減じて、多項式に当てはめたAICと比較してもよい。
【0030】
以上のように、目標体の状態が変化したと仮定した場合の関数の当てはめに、関数と同じ自由度の多項式を当てはめることによって、時系列データに対する関数当てはめ問題を簡略化することができるため、大規模な計算リソースを要さない。また、(4)式にような複雑な非線形関数においてもAICを計算することが可能となる。また、図2に示すような時系列残差データが得られた場合でも、本実施例によると状態変化を検出することが可能であり、短時間で目標体の状態変化を検出することが可能である。
【0031】
図5および図6に示すような目標体の状態変化を検出する方法について、さらに図3を参照しながら説明する。監視対象は目標体の運動ベクトルであり、運動ベクトルは、目標体の初期位置X、Y座標および速力X、Y成分から構成される。
【0032】
状態変化検出装置100は、目標から放射される音響信号の方位を連続的に観測し、観測データベース101を構築する。観測データベース101は最小でも観測時刻、観測方位、観測体X座標、観測体Y座標の4つのフィールドで構成する。なお、観測状態により観測方位の誤差標準偏差を得られる場合は5つ目のフィールドとして追加してもよい。
【0033】
状態推定部102は、観測データベース101を入力として、非線形最小二乗法を用いて尤もらしい目標体の運動ベクトルを推定する。状態推定部102は、Marqurdt法に基づいた特許文献2記載の方法、Newton法またはPowell法を適用し、(5)式が最小となる運動ベクトル(xt,yt,vx,vy)を求解する。
【0034】
【数5】
【0035】
ここで、t、oby、xo、yoは、それぞれ観測データベース101に格納された観測時刻、観測方位、観測体X座標、観測体Y座標を表し、サフィックスはデータインデックスである。
推定観測値ebyは、状態推定部102で求めた運動ベクトルから、(6)式により計算する。
【0036】
【数6】
【0037】
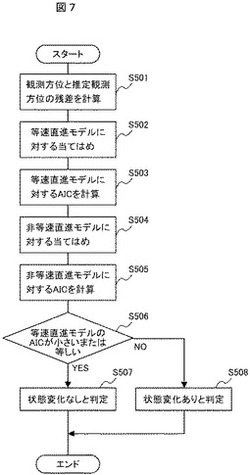
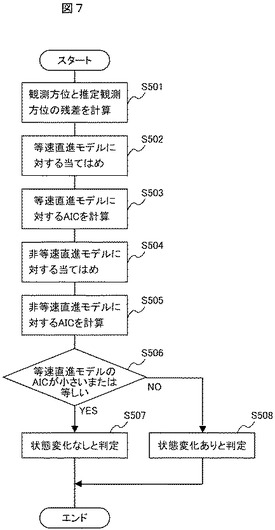
状態変化監視部104の動作を、図7の処理フローを用いて説明する。図7において、状態変化監視部104は、観測データベース上の観測方位obyと(6)式の推定観測方位ebyを用いて、(7)式により残差を計算する(S501)。
【0038】
【数7】
【0039】
次に状態変化監視部104は、ステップ501で計算した残差に対して等速直進モデルの当てはめを行う(S502)。等速直進モデルの残差関数は(8)式で表される。
【0040】
【数8】
【0041】
ここで、xt、yt、vx、vyは目標体の実際の運動ベクトルであり、ext、eyt、evx、evyは状態推定部が推定した運動ベクトルである。(8)式の関数における未知の係数はxt、yt、vx、vyであり、自由度は4である。状態推定部102で用いたような非線形最小二乗法により各未知係数を求めることも可能だが、状態変化監視部104は、計算量の削減という観点から(8)式を次の同じ自由度の近似多項式を残差に当てはめ、係数a0、a1、a2、a3を求める。
【0042】
【数9】
【0043】
状態推定部102が最良の解を導出した場合、実際の運動ベクトルと推定運動ベクトルが等しくなり、(9)式は(10)式となる。
【0044】
【数10】
【0045】
従って、状態が変化しない場合の残差関数の自由度は4または0である。
次に、状態変化監視部104は、等速直進モデルに対するAICを計算する。すなわち、ここでは、等速直進モデルは(9)式および(10)式なので、それぞれのモデルについて次式によりAICを計算する(S503)。
【0046】
【数11】
【0047】
ここで、kはモデルの自由度、nは観測データ数、z(t)は観測方位と推定観測方位の残差、f(t)は(9)式または(10)式の等速直進モデルである。
【0048】
状態変化監視部104は、次に、S501で計算した残差に対して、非等速直進モデルの当てはめを行う。目標体が1回状態を変えた場合の非等速直進モデルは(12)式であり、自由度は7となる。
【0049】
【数12】
【0050】
また、目標体が2回状態を変えた場合の非等速直進モデルは(13)式であり、自由度は10となる。
【0051】
【数13】
【0052】
以上のように、非等速直進モデルは目標体が状態を変える毎に3増える。ここでは目標体が1度だけ状態を変えた場合のみを考慮して7つの係数を持った次の多項式((14)式)を残差に対して当てはめ、a0〜a6を求める(S504)。
【0053】
【数14】
【0054】
状態変化監視部104は、(12)式でモデル化した非等速直進モデルの近似式(14)のAICを計算する(S505)。
【0055】
最後に、状態変化監視部104は、ステップ503とステップ505で計算したAICを比較して、目標体が等速直進モデルであるか非等速直進モデルであるかを判定する(S506)。すなわち、等速直進モデルのAICが小さい値か等しいならば(YES)、目標体の状態は変化してないと判定し(S507)、終了する。ステップ506で、非等速直進モデルのAICが小さければ(NO)、目標体の状態が変化したと判定し(S508)、終了する。
【0056】
本実施例の効果を、状態変化検出装置における目標体の変針・変速に適用した計算機シミュレーションにより説明する。観測体と目標体のシナリオは、図1に示した通りである。
【0057】
観測体から見れば、目標体の運動は未知であり、観測体は目標体からの音響信号を周期的に観測し、目標体の方位情報を得る。さらに状態推定部において目標体の方位情報から目標体の運動ベクトルを推定し、状態変化監視部で目標体の変針・変速を監視する。
【0058】
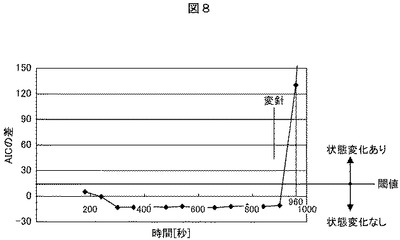
図8において、横軸は目標体検出からの経過時間、縦軸はAICの差=(等速直進モデルのAIC−非等速直進モデルのAIC)である。なお、図7では、閾値を0として説明したが、ここでは閾値を15とした。それぞれのAICの演算は、目標体検出後200秒より開始し、900秒での目標体の変針を、60秒後の960秒で検出していることが、分かる。
【0059】
本実施例に拠れば、目標体の観測値と推定観測値との残差を計算し、目標体が状態を変えていないモデルと、状態を変えているモデルを定式化し、両者のAICを演算して、AICが小さい側のモデルをより尤もらしいと判断することで、短時間でも目標体の状態変化を検出する事が可能となる。
【図面の簡単な説明】
【0060】
【図1】観測体と目標体の移動シナリオを説明する図である。
【図2】正規化予測残差の変化を説明する図である。
【図3】状態変化検出装置の機能ブロック図である。
【図4】状態変化検出装置のハードウェアブロック図である。
【図5】状態が変化していない場合の目標体と観測体の関係を示した図である。
【図6】状態が変化した場合の目標体と観測体の関係を示した図である。
【図7】状態変化検出装置の処理フローチャートである。
【図8】モデル間のAIC差の変化を説明する図である。
【符号の説明】
【0061】
1…目標体、100…状態変化検出装置、101…観測データベース、102…状態推定部、103…推定観測値、104…状態変化監視部、110…システムバス、120…中央演算装置(CPU)、130…メインメモリ、140…ハードディスク装置、150…表示装置(CRT)、160…インターフェース(I/F)。
【技術分野】
【0001】
本発明は、状態変化検出装置および状態変化検出プログラムに係り、監視対象の状態を時間的あるいは空間的に連続して観測することにより、監視対象の状態変化検出する状態変化検出装置および状態変化検出プログラムに関する。
【背景技術】
【0002】
特許文献1には、目標運動解析方法において、目標体の変針、変速等のマニューバの有無の判定を、観測量時系列に対する正規化予測残差に一次回帰式をあてはめて回帰式の係数を推定し、推定された係数で表現された回帰式の有意性検定により、正規化予測残差のバイアスの有無を判定して行う方法が記載されている。
【0003】
特許文献1記載の目標運動解析方法は、目標体の状態ベクトルXの要素である針路、速度の変化を検出する方法である。目標体から放射された音響信号を、観測者が保有する音響センサで受信し、この目標体から観測される時系列方位データと時系列周波数データから、目標体が等速直線運動を行うという仮定の下、目標体の状態ベクトルXを推定する。このようにして求めた状態ベクトルXから推定される観測値と実際に観測された観測値の残差を予測残差として算出し、さらに観測値それぞれの分散を考慮して正規化し、正規化予測残差を算出する。正規化予測残差は目標体が等速直線運動を行っている場合には、正規化予測残差系列に対する1次回帰式の傾きは0となるが、針路、速度の変化がある場合には傾きを持ち、正規化予測残差に偏りが生じる。この偏りをF検定により検出するのが特許文献1の方法である。すなわち正規化予測残差のF値と危険率αのF分布表の値Fα(1,m−2)を比較し、F>Fα(1,m−2)の時に目標体の針路、速度に変化があったと検出する。ここで、mはF検定に用いる正規化予測残差のデータ数である。
【0004】
図1および図2を用いて、上述した背景技術を簡単に説明する。ここで、図1は観測体と目標体の移動シナリオを説明する図である。図2は正規化予測残差の変化を説明する図である。
【0005】
図1において、目標体の初期位置は観測体からみて25°方向、距離20[kyd](18.3km)である。目標体は、矢印Aに示すように、900秒間180°方向に等速直進運動をした後に、210°方向に針路を変えて、再び等速直進運動をしている。また、観測体は矢印Bに示す運動をしている。
【0006】
図2は、目標体を発見してから、目標体が0〜900[秒]まで等速直進運動し、900[秒]に30[度]変針し、目標体が再び等速直進運動を開始してから65秒後までの正規化予測残差である。965秒時点のF値は3.3、危険率2.5%のF分布表の値F2.5(1,198)は5.1であり、目標体の変針を検出できていない。このように、特許文献1記載の方法では状態が変化した直後、充分に観測データが得られていない状態では、その変化を検出することができない。
特許文献2には、Marqurdt法に基づいて目標体の運動ベクトルを推定する技術が記載されている。
【0007】
【特許文献1】特開平10−062507号公報
【特許文献2】特開2005−017032号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
目標体の状態ベクトルの変化を検出するとき、状態変化後、目標体の状態変化を検出するまでに時間がかかるという問題点があった。
【課題を解決するための手段】
【0009】
上記の課題は、監視対象を連続的に観測して構築される観測データベースと、この観測データベースを基に監視対象の状態を推定する状態推定部と、この状態推定部が推定した推定観測値と観測データベースの比較により監視対象の状態が変化したか否かを判定する状態変化監視部とを有し、状態変化監視部は、状態推定部によって推定される推定観測値と観測データベースに格納されている実際の観測データから計算される残差に対して、監視対象の状態が変化していないと仮定したモデル関数のAICと、監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、その差により監視対象の状態が変化したか否かを判定する状態変化検出装置により、解決できる。
【0010】
また、コンピュータを、監視対象の連続観測で構築された観測データベースを基に監視対象の状態を推定する状態推定部、および状態推定部によって推定される推定観測値と観測データベースに格納されている実際の観測データから計算される残差に対して、監視対象の状態が変化していないと仮定したモデル関数のAICと、監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、その差により監視対象の状態が変化したか否かを判定する状態変化監視部、として機能させる状態変化検出プログラムにより、解決できる。
【発明の効果】
【0011】
本発明によれば、短時間でも監視対象の状態変化を検出する事が可能な、状態変化検出装置および状態変化検出プログラムを提供できる。
【発明を実施するための最良の形態】
【0012】
以下本発明の実施の形態について、実施例を用い図3ないし図8を用いて詳細に説明する。なお、実質同一部位には同じ参照番号を振り、説明は繰り返さない。ここで、図3は状態変化検出装置の機能ブロック図である。図4は状態変化検出装置のハードウェアブロック図である。図5は状態が変化していない場合の目標体と観測体の関係を示した図である。図6は状態が変化した場合の目標体と観測体の関係を示した図である。図7は状態変化検出装置の処理フローチャートである。図8はモデル間のAIC差の変化を説明する図である。
【0013】
図3において、状態変化検出装置100は、観測データベース101、状態推定部102、推定観測値103、状態変化監視部104から構成されている。状態変化検出装置100の観測データベース101には、目標体1の観測結果を時々刻々蓄積する。
【0014】
図4において、状態変化検出装置100は、システムバス110に接続された中央演算装置(CPU)120、メインメモリ130、ハードディスク装置140、表示装置(CRT)150、インターフェース160とから構成される。インターフェース160には、時刻、状態値、状態値標準偏差を含む観測データが入力され、ハードディスク装置140に観測データベース101として、記録される。なお、時刻は、状態変化検出装置100の図示しない内部時計から取得しても良い。メインメモリ130には、状態推定プログラム131と、状態変化監視プログラム132と、推定観測値103とが、記録される。
【0015】
図4から明らかなように、状態変化検出装置100は、コンピュータであり、状態推定プログラム131と、状態変化監視プログラム132とは、そのプログラムを実行することにより、コンピュータを、状態推定部102と、状態変化監視部104として、機能させる。
【0016】
図5および図6は目標体と観測体の関係を示した図であり、監視対象である目標体から放射される音響信号の方位を連続的に観測し、観測データベースを構築する。このとき、観測値は正規分布に従ったノイズ成分を含んでいる。
【0017】
状態推定部においては、観測値を目標体が等速直線運動をしている仮定の下で(1)式でモデル化する。
【0018】
【数1】
【0019】
ここで、目標体の状態は目標体の初期位置座標xt,yt、速力成分vx,vyの4つの係数で表される。状態推定部は最尤法に基づく最適化手法により、観測値と(1)式から計算される推定観測値の残差を最小化する係数xt,yt,vx,vyを推定する。従って、目標体が実際に等速直線運動をしている場合は、残差は(2)式のノイズ成分のみとなる。
【0020】
【数2】
【0021】
しかし、図6に示すようにt=tzigに係数vx,vyが変化した場合、観測される方位は次式に従う。
【0022】
【数3】
【0023】
ここで、vx1,vx2は目標体の状態変化前の速力成分、vx2,vy2は状態変化後の速力成分を表し、tzigは状態変化時刻を表している。また、εは観測値が含むノイズ成分である。
【0024】
従って、観測値と(1)式から推定される推定観測値の残差は(4)式に示すような非線形関数となり、残差がノイズ成分によるものか(4)式によるものかを状態変化監視部104で判定することにより、目標体の状態変化を検出することが可能となる。
【0025】
【数4】
【0026】
すなわち、観測値と状態推定が出力する推定観測値の時系列残差データが目標体の状態が変化していない場合のモデル関数である(2)式に近いのか、目標体がある時刻tzigで状態が変化した場合のモデル関数(4)式に近いのかを判定する。
【0027】
状態変化監視部104において、観測値と状態推定部102が出力する推定観測値の時系列残差データに(2)式と目標体の状態が変化したと仮定した場合の関数の自由度と同じ次数の多項式で関数の当てはめを行い、その結果得られる当てはめ関数と時系列残差データの差分からAIC(Akaike's Information Criteria:赤池の情報量規準)を計算し、それぞれのAICの比較を行う。その結果、(4)式を多項式近似した関数を当てはめた場合のAICの方が小さければ、目標体の状態が変化したと判定する。ここで、AICとは、観測値と理論値の差(残差)を評価する統計量であり、AICが小さい方が当てはまり具合が高い。
【0028】
なお、(2)式および(4)式は目標体の状態が変化した場合の観測方位関数および残差関数の一例であり、目標体の状態が変化したと仮定した場合の関数の自由度は目標体が状態を変化させる回数や状態推定部の出力結果に依存するため、(2)式の当てはめ結果から得られるAICと目標体が状態を変化させた場合に考え得る関数の自由度全ての多項式で当てはめを行い、AICを比較する。
【0029】
また、状態推定部が推定する係数xt、yt、vx、vyの推定誤差を考慮して、(2)式に当てはめた際のAICに微小な値を減じて、多項式に当てはめたAICと比較してもよい。
【0030】
以上のように、目標体の状態が変化したと仮定した場合の関数の当てはめに、関数と同じ自由度の多項式を当てはめることによって、時系列データに対する関数当てはめ問題を簡略化することができるため、大規模な計算リソースを要さない。また、(4)式にような複雑な非線形関数においてもAICを計算することが可能となる。また、図2に示すような時系列残差データが得られた場合でも、本実施例によると状態変化を検出することが可能であり、短時間で目標体の状態変化を検出することが可能である。
【0031】
図5および図6に示すような目標体の状態変化を検出する方法について、さらに図3を参照しながら説明する。監視対象は目標体の運動ベクトルであり、運動ベクトルは、目標体の初期位置X、Y座標および速力X、Y成分から構成される。
【0032】
状態変化検出装置100は、目標から放射される音響信号の方位を連続的に観測し、観測データベース101を構築する。観測データベース101は最小でも観測時刻、観測方位、観測体X座標、観測体Y座標の4つのフィールドで構成する。なお、観測状態により観測方位の誤差標準偏差を得られる場合は5つ目のフィールドとして追加してもよい。
【0033】
状態推定部102は、観測データベース101を入力として、非線形最小二乗法を用いて尤もらしい目標体の運動ベクトルを推定する。状態推定部102は、Marqurdt法に基づいた特許文献2記載の方法、Newton法またはPowell法を適用し、(5)式が最小となる運動ベクトル(xt,yt,vx,vy)を求解する。
【0034】
【数5】
【0035】
ここで、t、oby、xo、yoは、それぞれ観測データベース101に格納された観測時刻、観測方位、観測体X座標、観測体Y座標を表し、サフィックスはデータインデックスである。
推定観測値ebyは、状態推定部102で求めた運動ベクトルから、(6)式により計算する。
【0036】
【数6】
【0037】
状態変化監視部104の動作を、図7の処理フローを用いて説明する。図7において、状態変化監視部104は、観測データベース上の観測方位obyと(6)式の推定観測方位ebyを用いて、(7)式により残差を計算する(S501)。
【0038】
【数7】
【0039】
次に状態変化監視部104は、ステップ501で計算した残差に対して等速直進モデルの当てはめを行う(S502)。等速直進モデルの残差関数は(8)式で表される。
【0040】
【数8】
【0041】
ここで、xt、yt、vx、vyは目標体の実際の運動ベクトルであり、ext、eyt、evx、evyは状態推定部が推定した運動ベクトルである。(8)式の関数における未知の係数はxt、yt、vx、vyであり、自由度は4である。状態推定部102で用いたような非線形最小二乗法により各未知係数を求めることも可能だが、状態変化監視部104は、計算量の削減という観点から(8)式を次の同じ自由度の近似多項式を残差に当てはめ、係数a0、a1、a2、a3を求める。
【0042】
【数9】
【0043】
状態推定部102が最良の解を導出した場合、実際の運動ベクトルと推定運動ベクトルが等しくなり、(9)式は(10)式となる。
【0044】
【数10】
【0045】
従って、状態が変化しない場合の残差関数の自由度は4または0である。
次に、状態変化監視部104は、等速直進モデルに対するAICを計算する。すなわち、ここでは、等速直進モデルは(9)式および(10)式なので、それぞれのモデルについて次式によりAICを計算する(S503)。
【0046】
【数11】
【0047】
ここで、kはモデルの自由度、nは観測データ数、z(t)は観測方位と推定観測方位の残差、f(t)は(9)式または(10)式の等速直進モデルである。
【0048】
状態変化監視部104は、次に、S501で計算した残差に対して、非等速直進モデルの当てはめを行う。目標体が1回状態を変えた場合の非等速直進モデルは(12)式であり、自由度は7となる。
【0049】
【数12】
【0050】
また、目標体が2回状態を変えた場合の非等速直進モデルは(13)式であり、自由度は10となる。
【0051】
【数13】
【0052】
以上のように、非等速直進モデルは目標体が状態を変える毎に3増える。ここでは目標体が1度だけ状態を変えた場合のみを考慮して7つの係数を持った次の多項式((14)式)を残差に対して当てはめ、a0〜a6を求める(S504)。
【0053】
【数14】
【0054】
状態変化監視部104は、(12)式でモデル化した非等速直進モデルの近似式(14)のAICを計算する(S505)。
【0055】
最後に、状態変化監視部104は、ステップ503とステップ505で計算したAICを比較して、目標体が等速直進モデルであるか非等速直進モデルであるかを判定する(S506)。すなわち、等速直進モデルのAICが小さい値か等しいならば(YES)、目標体の状態は変化してないと判定し(S507)、終了する。ステップ506で、非等速直進モデルのAICが小さければ(NO)、目標体の状態が変化したと判定し(S508)、終了する。
【0056】
本実施例の効果を、状態変化検出装置における目標体の変針・変速に適用した計算機シミュレーションにより説明する。観測体と目標体のシナリオは、図1に示した通りである。
【0057】
観測体から見れば、目標体の運動は未知であり、観測体は目標体からの音響信号を周期的に観測し、目標体の方位情報を得る。さらに状態推定部において目標体の方位情報から目標体の運動ベクトルを推定し、状態変化監視部で目標体の変針・変速を監視する。
【0058】
図8において、横軸は目標体検出からの経過時間、縦軸はAICの差=(等速直進モデルのAIC−非等速直進モデルのAIC)である。なお、図7では、閾値を0として説明したが、ここでは閾値を15とした。それぞれのAICの演算は、目標体検出後200秒より開始し、900秒での目標体の変針を、60秒後の960秒で検出していることが、分かる。
【0059】
本実施例に拠れば、目標体の観測値と推定観測値との残差を計算し、目標体が状態を変えていないモデルと、状態を変えているモデルを定式化し、両者のAICを演算して、AICが小さい側のモデルをより尤もらしいと判断することで、短時間でも目標体の状態変化を検出する事が可能となる。
【図面の簡単な説明】
【0060】
【図1】観測体と目標体の移動シナリオを説明する図である。
【図2】正規化予測残差の変化を説明する図である。
【図3】状態変化検出装置の機能ブロック図である。
【図4】状態変化検出装置のハードウェアブロック図である。
【図5】状態が変化していない場合の目標体と観測体の関係を示した図である。
【図6】状態が変化した場合の目標体と観測体の関係を示した図である。
【図7】状態変化検出装置の処理フローチャートである。
【図8】モデル間のAIC差の変化を説明する図である。
【符号の説明】
【0061】
1…目標体、100…状態変化検出装置、101…観測データベース、102…状態推定部、103…推定観測値、104…状態変化監視部、110…システムバス、120…中央演算装置(CPU)、130…メインメモリ、140…ハードディスク装置、150…表示装置(CRT)、160…インターフェース(I/F)。
【特許請求の範囲】
【請求項1】
監視対象を連続的に観測して構築される観測データベースと、この観測データベースを基に前記監視対象の状態を推定する状態推定部と、この状態推定部が推定した推定観測値と前記観測データベースの比較により監視対象の状態が変化したか否かを判定する状態変化監視部と、を有する状態変化検出装置において、
前記状態変化監視部は、前記状態推定部によって推定される推定観測値と前記観測データベースに格納されている実際の観測データから計算される残差に対して、前記監視対象の状態が変化していないと仮定したモデル関数のAICと、前記監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、前記AICの差により監視対象の状態が変化したか否かを判定することを特徴とする状態変化検出装置。
【請求項2】
コンピュータを、
監視対象の連続観測で構築された観測データベースを基に前記監視対象の状態を推定する状態推定部、および
この状態推定部によって推定される推定観測値と前記観測データベースに格納されている実際の観測データから計算される残差に対して、前記監視対象の状態が変化していないと仮定したモデル関数のAICと、前記監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、前記AICの差により監視対象の状態が変化したか否かを判定する状態変化監視部、
として機能させる状態変化検出プログラム。
【請求項1】
監視対象を連続的に観測して構築される観測データベースと、この観測データベースを基に前記監視対象の状態を推定する状態推定部と、この状態推定部が推定した推定観測値と前記観測データベースの比較により監視対象の状態が変化したか否かを判定する状態変化監視部と、を有する状態変化検出装置において、
前記状態変化監視部は、前記状態推定部によって推定される推定観測値と前記観測データベースに格納されている実際の観測データから計算される残差に対して、前記監視対象の状態が変化していないと仮定したモデル関数のAICと、前記監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、前記AICの差により監視対象の状態が変化したか否かを判定することを特徴とする状態変化検出装置。
【請求項2】
コンピュータを、
監視対象の連続観測で構築された観測データベースを基に前記監視対象の状態を推定する状態推定部、および
この状態推定部によって推定される推定観測値と前記観測データベースに格納されている実際の観測データから計算される残差に対して、前記監視対象の状態が変化していないと仮定したモデル関数のAICと、前記監視対象の状態が変化したと仮定したモデル関数のAICとを計算し、前記AICの差により監視対象の状態が変化したか否かを判定する状態変化監視部、
として機能させる状態変化検出プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−32461(P2008−32461A)
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願番号】特願2006−204420(P2006−204420)
【出願日】平成18年7月27日(2006.7.27)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願日】平成18年7月27日(2006.7.27)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]