
状態推定装置、電子機器及びプログラム
【課題】 カルマンフィルターの内部状態変数と観測量の補正処理により、推定精度を維持することができる状態推定装置の提供。
【解決手段】 状態推定装置100は、観測信号に基づきシステムの内部状態をカルマンフィルターにより推定する状態推定部180と、観測信号を観測量に変換する信号変換部120と、観測量の補正処理を行う補正部160と、補正部160と状態推定部180を制御する制御部140とを含む。制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行う。補正部160は、補正指示が行われた場合に、観測量の補正処理を行う。状態推定部180は、補正指示が行われた場合に、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づき状態推定を行う。
【解決手段】 状態推定装置100は、観測信号に基づきシステムの内部状態をカルマンフィルターにより推定する状態推定部180と、観測信号を観測量に変換する信号変換部120と、観測量の補正処理を行う補正部160と、補正部160と状態推定部180を制御する制御部140とを含む。制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行う。補正部160は、補正指示が行われた場合に、観測量の補正処理を行う。状態推定部180は、補正指示が行われた場合に、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づき状態推定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、状態推定装置、電子機器及びプログラム等に関係する。
【背景技術】
【0002】
近年、方角や位置等を求めるシステムとして、測位システムや慣性航法システムが広く知られている。
【0003】
測位システムとしては、GPS(Global Positioning System)が広く知られており、携帯型電話機やカーナビゲーション装置等に内蔵された位置算出装置に利用されている。GPSでは、複数のGPS衛星の位置や、各GPS衛星から位置算出装置までの擬似距離等の情報に基づいて、位置算出装置の位置等を算出する。また、位置算出装置の移動前の位置と移動後の位置とのベクトルを求めることにより、位置算出装置の移動している方角を推定することもできる。
【0004】
一方、慣性航法システムは、外部からの電波による支援を得ることなく、自らに搭載する地磁気センサーや、ジャイロセンサー、加速度センサー等からの情報のみによって、自らの位置や速度、姿勢、向き等を推定する。地球上での絶対位置が分かるGPSに対して、慣性航法システムは初期位置からの相対位置を推定することができる。
【0005】
最近では、GPSや慣性航法システムを利用して、ユーザーの道案内をするサービス等も行われている。
【0006】
これらのGPSや慣性航法システムに関する発明としては特許文献1、2に記載される従来技術がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−126148号公報
【特許文献2】特開2007−276507号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
GPSは、電波状況に依存するため、地下や建物の中などでは位置や方角を正確に推定することができない。そのため、先に述べたGPSを利用する道案内サービスでは、ユーザーが地下や建物の中に入ってしまうと、十分な精度を保ちつつ、サービスを提供することができないという点が問題となる。
【0009】
一方、慣性航法システムを利用した道案内サービスは、電波状況には依存しないため、地下街等においても、精度を保ったまま道案内サービスを提供することができ、上記の問題を解決することができる。
【0010】
しかし、慣性航法システムは、地磁気センサーを用いて、方角を推定するため、地磁気環境の悪い場所では誤った方角を推定してしまうという問題がある。例えば、地磁気センサーを携帯電話やPCなどに近づけると、外部の磁場を検出してしまい、大きく誤った方角を検出してしまう。
【0011】
本発明の幾つかの態様によれば、観測量と、カルマンフィルターの内部状態変数との補正処理を行うことにより、誤った推定をした後も、元の推定精度を維持することができる状態推定装置、電子機器及びプログラム等を提供できる。
【課題を解決するための手段】
【0012】
本発明の一態様は、観測により入力される観測信号に基づいて、前記観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部と、前記観測信号を観測量に変換し、前記観測量を補正部に出力する信号変換部と、前記観測量の補正処理を行い、補正処理後の前記観測量を前記状態推定部に出力する補正部と、前記補正部と前記状態推定部を制御する制御部と、を含み、前記制御部は、所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、前記補正部は、前記補正指示が行われた場合に、前記観測量の補正処理を行い、前記状態推定部は、前記補正指示が行われた場合に、前記観測量に対応する内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とする状態推定装置に関係する。また本発明の他の態様は、上記各部としてコンピューターを機能させるプログラム、又は該プログラムを記憶したコンピューター読み取り可能な情報記憶媒体に関係する。
【0013】
本発明の一態様では、入力された観測信号を観測量へ変換する。次に、本発明の一態様では、補正条件が成立したと判断する場合、又は補正条件が成立した旨を通知された場合に、観測量と内部状態変数の補正指示が行われ、これらの値を補正する。これにより、補正した観測量を入力とし、内部状態変数を補正した状態で、カルマンフィルターにより、状態推定を行うことができる。
【0014】
また、本発明の一態様では、前記信号変換部は、方位センサーからのセンサー信号を含む観測信号を、磁北を基準とする方位角の情報を含む観測量に変換し、前記制御部は、前記所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、方位角補正データを通知し、前記補正部は、前記補正指示が行われた場合に、前記制御部から通知された前記方位角補正データと、磁北を真北に補正する偏角とに基づいて、前記観測量の補正処理を行い、補正後の前記観測量を前記状態推定部に出力し、前記状態推定部は、前記補正指示が行われた場合に、前記方位角補正データに基づいて、前記観測量に対応する前記内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行ってもよい。
【0015】
これにより、方位センサーからのセンサー信号を含む観測信号を、方位角の情報を含む観測量に変換することができる。そして、方位角の情報を含む観測量と内部状態変数を補正しながら、状態推定を行うことが可能になる。
【0016】
また、本発明の一態様では、前記補正部は、前記補正指示が行われた場合には、前記方位角補正データと前記偏角とに基づいて、前記観測量の補正処理を行い、前記補正指示が行われない場合には、前記偏角に基づいて、前記観測量の補正処理を行ってもよい。
【0017】
これにより、補正指示が行われた場合には、方位角補正データと偏角とに基づいて観測量を補正し、補正指示が行われない場合には、偏角によって観測量を補正して、状態推定を行うことができる。
【0018】
また、本発明の一態様では、前記状態推定部は、前記補正指示が行われた場合には、前記方位角補正データに基づいて、前記内部状態変数の補正処理を行い、前記補正指示が行われない場合には、前記内部状態変数の補正処理を行わなくてもよい。
【0019】
これにより、補正指示が行われない場合に、前回更新した値に補正を加えていない内部状態変数と、偏角により補正された観測量とを用いて、状態推定を行うこと等が可能となる。
【0020】
また、本発明の一態様では、前記信号変換部は、方位センサーから通知された観測信号に基づいて、全磁力を算出し、前記全磁力を前記制御部に通知し、前記制御部は、通知された前記全磁力に基づいて、前記所定の補正条件の判断をし、前記全磁力が所定の閾値により特定される範囲内にない場合には、所定の補正条件を満たすと判断し、前記全磁力が前記所定の閾値の範囲内にある場合には、所定の補正条件を満たさないと判断してもよい。
【0021】
これにより、方位センサーにより検出された観測信号に基づき、全磁力を算出することができ、その全磁力に基づいて、補正処理を行うか否かを決定すること等ができる。
【0022】
また、本発明の一態様では、前記信号変換部は、前記方位センサーから通知された観測信号に基づいて、伏角を算出し、前記伏角を前記制御部に通知し、前記制御部は、通知された前記伏角に基づいて、前記所定の補正条件の判断をし、前記伏角が所定の閾値により特定される範囲内にない場合には、前記所定の補正条件を満たすと判断し、前記伏角が前記所定の閾値の範囲内にある場合には、前記所定の補正条件を満たさないと判断してもよい。
【0023】
これにより、方位センサーにより検出された観測信号に基づき、伏角を算出することができ、その伏角に基づいて、補正処理を行うか否かを決定すること等ができる。
【0024】
また、本発明の一態様では、前記制御部は、前記信号変換部から取得した前記観測量をマップマッチング部に出力し、マップマッチング部からマップマッチングの結果を取得し、前記マップマッチングの結果に基づいて、前記所定の補正条件を判断してもよい。
【0025】
これにより、マップマッチングの結果に基づいて、補正処理を行うか否かを決定すること等ができる。
【0026】
また、本発明の一態様では、前記制御部は、操作部から入力されたユーザー入力情報に基づいて、前記方位角補正データを特定し、前記補正部及び前記状態推定部に前記補正指示と前記方位角補正データとを通知し、前記補正部は、前記補正指示が行われた場合には、前記方位角補正データと、前記偏角とに基づいて、前記観測量の補正処理を行い、前記状態推定部は、前記補正指示が行われた場合には、前記方位角補正データに基づいて、前記内部状態変数の補正処理を行ってもよい。
【0027】
これにより、ユーザー入力情報に基づいて、方位角補正データを特定することができる。そして、ユーザーからの入力があった場合には、所定の補正条件の成立の如何に関わらず、補正部と状態推定部に、補正指示を行うことができ、この際に特定した方位角補正データも通知することができる。
【0028】
また、本発明の他の態様では、前記状態推定装置を含むことを特徴とする電子機器に関係する。
【図面の簡単な説明】
【0029】
【図1】比較例を説明するフローチャート。
【図2】図2(A)〜図2(D)は、比較例の問題点の説明図。
【図3】本発明の概要を説明するフローチャート。
【図4】本実施形態の状態推定装置及びこれを含む電子機器の構成例。
【図5】偏角・伏角・全磁力の説明図。
【図6】図6(A)、図6(B)は、補正条件の説明図。
【図7】図7(A)、図7(B)は、全磁力に基づく補正条件の判定処理の説明図。
【図8】図8(A)、図8(B)は、伏角に基づく補正条件の判定処理の説明図。
【図9】図9(A)、図9(B)は、マップマッチング結果に基づく補正条件の判定の説明図。
【図10】マップマッチング結果に基づき補正条件を判断する手法のフローチャート。
【図11】全磁力に基づき補正条件を判断する手法のフローチャート。
【発明を実施するための形態】
【0030】
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。
【0031】
1.概要
ここでは、地磁気センサーや加速度センサー等から取得した観測信号に基づいて、方位角を推定する慣性航法システムを実現する状態推定装置に関する実施形態について説明する。
【0032】
慣性航法システムにおいては、地磁気センサー等から得られる観測信号を基に方位角を推定する。ただし、地磁気センサーから直接求められる方位角は、磁北を基準としたものである。そのため、地図等で一般的に用いられている真北を基準とした方位角に、観測信号から直接求めた方位角を補正する必要があり、偏角に基づきこの補正処理を行っている。
【0033】
しかし、地磁気センサーは、地磁気環境の悪い場所では誤った方位角を検出してしまうことある。例えば、地磁気センサーを携帯電話やPCなどに近づけると、外部の磁場を検出してしまい、大きく誤った方角を検出してしまう。そのため、上記の補正処理によって求められる真北を基準とした方位角も誤った値となってしまう。この後、慣性航法システムでは、カルマンフィルターを用いて現在の方位角を濾波する処理が行われるが、カルマンフィルターの入力である真北を基準とした方位角が間違っている状態が続くと、その後に推定される方位角も期待値から大きく外れたものとなってしまう。
【0034】
そこで、本実施形態の比較例として、図1のフローチャートに示すような手法が考えられる。この比較例では、まず地磁気センサーや加速度センサー等から観測信号を受信し(S1)、次に観測信号を観測量に変換する(S2)。そして、観測量に表される磁北を基準とした方位角を、真北を基準とした方位角に偏角を用いて補正する(S3)。ここで、今回検出した観測信号に基づく方位角が誤っていると判断する場合には、上記の補正処理に加えて、今回検出した観測信号に基づく方位角と、期待する方位角との差などに基づき、観測量を補正する(S3)。そして、カルマンフィルターによる状態推定を行い(S4)、カルマンフィルターの内部状態変数の更新を行う(S5)。そして、一定時間周期で、S1〜S5の処理を繰り返す。つまり、本比較例は、今回検出した観測信号に基づく方位角が誤っていると判断された若しくは判断した時に、上記手段により、入力に含まれる誤差を軽減するという手法である。
【0035】
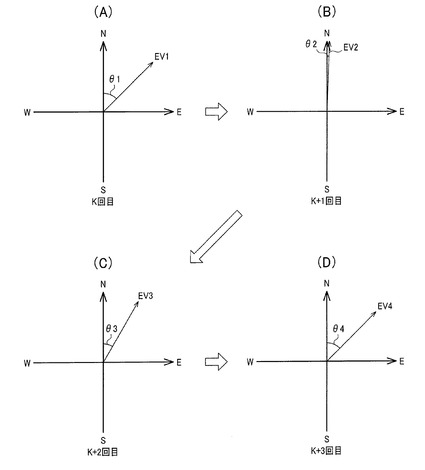
しかし、比較例のように、観測量のみを補正した場合において、地磁気センサーによって検出される地磁気に同程度の誤差が混じり続ける場合には、図2(A)〜図2(D)に示すように濾波した結果が変化する。図2(A)は、k回目の状態推定において、実際の真北の方向がN軸方向であるが、真北の方向をEV1と濾波し、N軸とEV1の差分となる角度がθ1である場合を示している。次に、図2(B)は、k+1回目の状態推定において、前回の誤差θ1を用いて、入力値を補正した後の濾波結果を示している。図2(B)では、真北の方向をEV2と濾波し、N軸とEV2との差分となる角度がθ2となっており、濾波結果が期待値に近づいている。そして、図2(C)は、k+2回目の状態推定結果を示している。この時も図2(B)と同様に、θ1で観測量を補正しているにも関わらず、濾波した真北方向EV3とN軸の差がθ3となり、θ2よりも大きくなってしまっている。さらに、図2(D)では、k+3回目の状態推定を行っているが、濾波した真北方向EV4とN軸の差であるθ4がθ1とほぼ同じになってしまっている。つまり、比較例のように、観測量のみを補正した場合には、元の誤った方位角に濾波結果が次第に戻っていってしまうという問題が発生する。
【0036】
比較例において、図2のように濾波結果が変化してしまう原因は、カルマンフィルターの内部状態変数の中に、前回の状態推定結果を示す値などが含まれているにも関わらず、観測量のみを補正しており、観測量と内部状態変数の整合性が取れなくなっていることであると考えられる。
【0037】
そこで、この比較例の問題点に対して、本出願人は、検出される観測信号に誤差が含まれると判断される場合において、観測量の他に内部状態変数も補正する手法を提案する。
【0038】
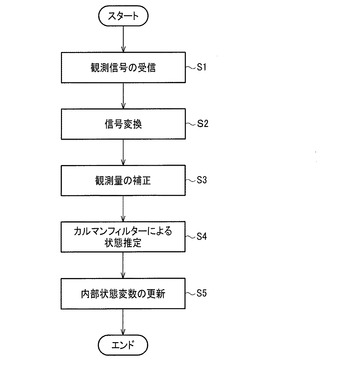
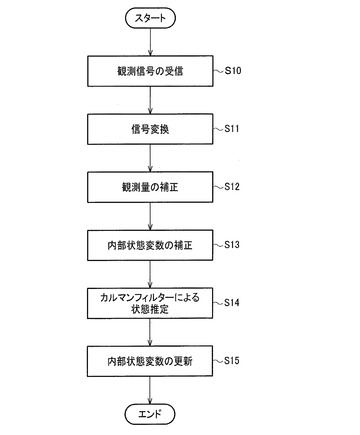
本手法の概要を図3のフローチャートに示す。観測信号の受信(S10)、信号変換(S11)、観測量の補正(S12)は、比較例と同様である。これらの処理を行った後に、今回検出した観測信号に基づく方位角と期待する方位角との差分などに基づき、内部状態変数の補正を行う(S13)。そして、カルマンフィルターによる状態推定(S14)、内部状態変数の更新(S15)を行う。
【0039】
以下、本実施形態のシステム構成例を説明し、その後、フローチャートを用いて本実施形態における処理の詳細について説明する。
【0040】
2.カルマンフィルターの原理
以下、カルマンフィルターの概要を簡単に説明する。
【0041】
カルマンフィルターは、直接観測不可能な値を、観測可能な値を用いて精度良く推定する際に用いられる状態推定器である。
【0042】
例えば、ある時刻tkにおいて、あるシステムの観測不可能な状態量Xkを求めたい場合を考える。Xkは直接観測できない値であるが、逆にXkを用いれば、観測可能な値である観測量Zkを、(1)式で表せることが分かっている。
【0043】
【数1】

【0044】
(1)式において、kはステップ数、Xkは時刻tkにおけるシステムの状態推定値、Zkは時刻tkにおいて入力される観測量、Hkは観測行列、Vkは観測雑音を示している。なお、Hkは物理法則や測定等によって予め確定した行列である。(1)式を観測方程式という。
【0045】
また、時刻tkにおけるシステムの状態量Xkは、1ステップ前の時刻tk-1の状態量Xk-1をもとに、次のように表現されることが分かっているとする。
【0046】
【数2】
【0047】
(2)式において、Xk-1は時刻tk-1におけるシステムの状態量、Fkは状態遷移行列、Bkは駆動行列、Ukは制御入力、Wkはシステム雑音(白色雑音)を示している。なお、Fk及びBkは、物理法則や測定等によって予め確定した行列である。(2)式を状態方程式という。
【0048】
ここで、(1)式に観測により得られた観測量Zkを代入すれば、真の状態量Xkが求められるようにも思えるが、観測雑音Vkが不明であるため、(1)式から直接に真の状態量Xkを求めることはできない。
【0049】
そこで、まず、(2)式において、システム雑音Wkがないと仮定した場合を考え、その場合の(2)式に相当する(3)式により、状態推定値Xk|k-1を求める。
【0050】
【数3】
【0051】
(3)式において、Xk|k-1は時刻tk-1において推定した時刻tkのシステムの状態推定値であり、Xk-1|k-1は時刻tk-1において推定した時刻tk-1のシステムの状態推定値である。
【0052】
次に、(1)式において、観測誤差がないと仮定した場合を考え、その場合の(1)式に相当する(4)式により、観測誤差がないと仮定した場合の観測量の予測値Zk,eを求める。(4)式のXk|k-1は(3)式により求められたものである。
【0053】
【数4】
【0054】
そして、実際に観測により得られた観測量Zk,rとZk,eとの差をとる。
【0055】
【数5】
【0056】
Δkを観測残差という。観測残差は、以下の3値に起因する値である。一つ目の値は、雑音がないとした場合における、状態推定値から求めた観測量の推定値(観測推定量)と、実際の観測量との誤差である。そして、二つ目の値は、観測雑音Vkであり、三つ目の値は、システム雑音Wkである。
【0057】
さらに、観測残差Δkの共分散Skを算出する。観測残差Δkの共分散Skは、システムの状態推定値Xkから求められた観測推定量の確からしさと、観測雑音とシステム雑音がどの程度含まれているかを表すものである。つまり、観測残差Δkの共分散Skをできるだけ小さくすることができれば、観測雑音とシステム雑音を抑圧しつつ、観測推定量を確からしいものにすることができる。さらに、観測推定量の正確性が担保されれば、観測推定量を求める際に参照された状態推定値の正確さも期待できる。
【0058】
したがって、観測残差Δkの共分散Skをできるだけ小さくするように制御すれば、システムの状態推定値も確からしいものとなる。
【0059】
カルマンフィルターでは、以上の原理を基に、観測更新と予測処理との2つの処理をステップ毎に繰り返して、尤もらしい状態推定値Xkを推定する。これらの処理の詳細は、以下のシステム構成において述べる。
【0060】
3.システム構成例
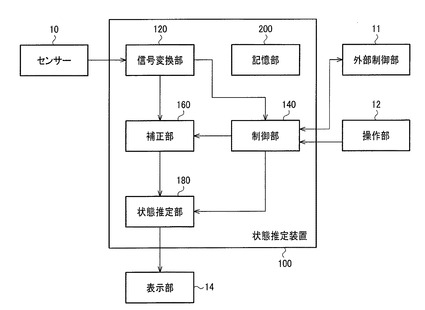
次に、図4に本実施形態の状態推定装置及びこれを含む電子機器の構成例を示す。
【0061】
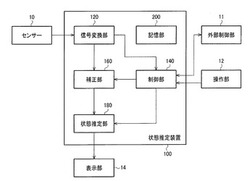
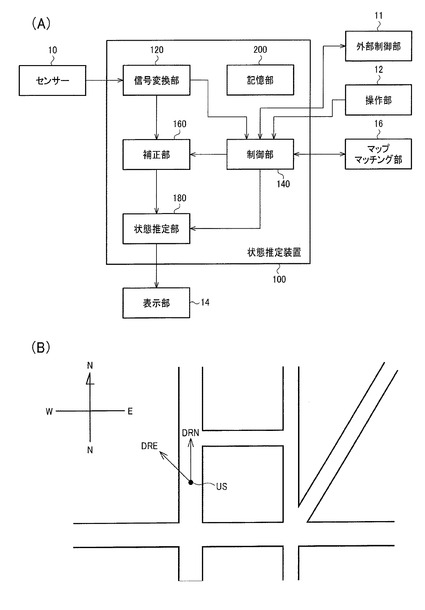
状態推定装置100は、信号変換部120と、制御部140と、補正部160と、状態推定部180と、記憶部200と、を含む。また、状態推定装置100を含む電子機器の例としては、センサー10や、外部制御部11、操作部12、表示部14などを含む携帯端末などが挙げられる。なお、状態推定装置100及びこれを含む電子機器は、図4の構成に限定されず、これらの一部の構成要素を省略したり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0062】
ここで、センサー10は、地磁気センサー等の方位センサーや、加速度センサー、ジャイロセンサー等のセンサーであり、観測信号を信号変換部120に出力する。方位センサーは、例えば地磁気センサー等であり、センサーの向いている方位を角度(0°〜360°)で計測する。地磁気センサーは、例えば磁場の強さによって抵抗値やインピーダンス値が増減する素子等で構成され、三軸の地磁気情報を検知する。加速度センサーは、例えば外力によって抵抗値が増減する素子等で構成され、三軸の加速度情報を検知する。ジャイロセンサーは、三軸の角速度情報を検知する。また、地磁気センサーや加速度センサー、ジャイロセンサーの機能を併せ持つセンサーを用いてもよい。さらに、地磁気情報や加速度情報から、磁北を基準とした偏角を算出し、出力するセンサーを用いてもよい。
【0063】
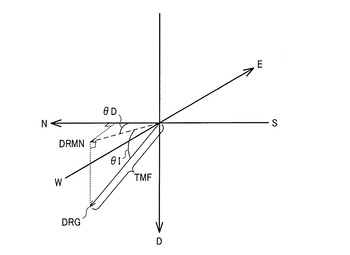
ここで、地磁気とは、地球が持つ磁気及びそれにより地球上に生じる磁場をいう。地磁気はベクトル量であり、大きさと方向を持つ。地磁気(地磁気ベクトル)の大きさは全磁力によって表され、地磁気の方向は偏角と伏角により表される。偏角、伏角、全磁力をまとめて、地磁気の3要素という。図5のNED座標系においては、DRGが地磁気ベクトルを示している。
【0064】
また、一般的に、方位角を求める際には、「北」を基準にするが、地磁気センサーから直接求められる「北」は磁北であり、真北とは異なる。
【0065】
磁北とは、地磁気ベクトルを水平面へ正射影した正射影ベクトルの方向のことである。言い換えると、地磁気のS極に対して、方位磁石の磁針のN極が反応して指し示す方位のことである。図5では、DRMNの方向が磁北である。
【0066】
一方、真北とは、地軸の北極点を指す方向のことを言う。一般的に、地理上で「北」と言えば、真北のことを指す。図5では、N軸方向が真北である。
【0067】
真北と磁北はずれており、磁北と真北とが形成する角のことを偏角という。例えば、東京付近では磁北は真北に対して西に約7度ずれている。右手系のNED座標系では、西に傾いている場合にマイナス、東に傾いている場合にプラスとなるように定義されるため、前述した例で言えば、東京付近では磁北は真北に対して−7度ずれているという。偏角は地域により異なる。図5では、θDが偏角である。
【0068】
さらに、地磁気ベクトルは、赤道付近を除けば、地面に対して平行ではなく、地面と斜めに交わっている。地磁気ベクトルを垂直面へ正射影した正射影ベクトルの方向と、水平面とが形成する角のことを伏角という。右手系のNED座標系では、地磁気が水平面に向かって突き刺さる方向の場合がプラス、水平面から出て行く向きの場合がマイナスとなるように定義される。伏角も地域により異なる。図5では、θIが伏角である。
【0069】
そして、地磁気の大きさを全磁力という。偏角と伏角同様、全磁力も場所によって異なる。図5では、地磁気ベクトルDRGの長さとして表されるTMFが全磁力となる。
【0070】
外部制御部11は、例えば、本実施形態の状態推定装置を搭載した携帯電子機器等に設けられ、後述する補正条件の判断を行ってもよく、方位角補正データを制御部140に通知してもよい。操作部12は、例えば本実施形態の状態推定装置を搭載した携帯電子機器等に設けられるボタン等であり、表示部14は携帯電子機器の画面等である。
【0071】
次に各部で行われる処理について説明する。
【0072】
信号変換部120は、センサー10から観測信号を取得し、観測量に変換する。そして、観測量を制御部140と補正部160とに出力する。
【0073】
ここで、観測信号とは、センサーから直接得られる情報をいう。例えば、本実施形態では、観測信号Yを(6)式のように設定する。
【0074】
【数6】
【0075】
(6)式において、θ’は磁北を基準とした方位角である。また、「(ax,ay,az)」はボディー座標系で加速度センサーが検出する重力加速度である。「(ωx,ωy,ωz)」はボディー座標系でジャイロセンサーが検出する角速度である。ただし、観測信号はここで説明したものに限定されない。例えば、ボディー座標系で地磁気センサーが検出する地磁気である「(gx,gy,gz)」などを観測信号に含んでも良い。
【0076】
また、観測量とは、カルマンフィルターの入力となる情報をいう。具体例については後述する。
【0077】
制御部140は、補正部160と状態推定部180の制御を行う。
【0078】
補正部160は、信号変換部120から取得した観測量のうち磁北を基準とした方位角θ’を、偏角θDに基づき(7)式にて補正し、真北を基準とする方位角θを算出する。
【0079】
【数7】
【0080】
状態推定部180は、補正部160から取得した補正後の観測量を入力として、カルマンフィルターにより、方位角を推定する。
【0081】
ここで、本実施形態では、観測量Zを次式(8)のように設定する。
【0082】
【数8】
【0083】
(8)式において、θは(7)式により求められた方位角である。「(ax,ay,az)」は(6)式における重力加速度と同一の値である。「(VN,VE,VD)」はNED座標系における速度の南北方向(N)、東西方向(E)及び高度方向(D)の各成分である。「(ωx,ωy,ωz)」は(6)式における角速度と同一の値である。ただし、観測量はここで説明したものに限定されない。
【0084】
また、状態量とは、システムの観測対象であるが、直接は観測不可能な値をいい、状態推定値とは、カルマンフィルターにより状態量を推定した値をいう。例えば、本実施形態では、カルマンフィルターにおいて推定対象とするシステムの状態推定値Xを次式(9)のように設定する。
【0085】
【数9】
【0086】
(9)式において、「(q0,q1,q2,q3)」はクォータニオン(四元数)を表し、「(vN,vE,vD)」はNED座標系における速度の南北方向(N)、東西方向(E)及び高度方向(D)の各成分である。
【0087】
なお、ここで説明したものに限定されず、状態量としてクォータニオンの代わりにロール・ピッチ・ヨー角を用いる方法や、速度の他に、状態量に緯度・経度・高度を追加する方法、状態量にジャイロや加速度のバイアス値を追加する方法などが可能である。
【0088】
以上の前提条件の下に、カルマンフィルターでは、観測更新と予測処理との2つの処理を繰り返し行う。観測更新とは、外部から与えられる(実際に観測した)観測量Zk,rを利用して1ステップ前に予測した状態推定値Xk|k-1及び誤差共分散Pk|k-1を更新する処理である。一方、予測処理とは、更新した状態推定値Xk|k及び誤差共分散Pk|kから次のステップの状態推定値Xk+1|k及び誤差共分散Pk+1|kを予測する処理である。そして、カルマンフィルターは、この2つの処理を繰り返すことにより、尤もらしい状態推定値Xkを推定する。
【0089】
まず、観測更新は、次式(10)〜(13)で定式化される。
【0090】
【数10】
【0091】
【数11】
【0092】
【数12】
【0093】
【数13】
【0094】
(10)〜(13)において、Skは、上述した観測残差Δkの共分散である。Pk|k-1は、時刻tk-1において推定した時刻tkのシステムの状態推定値Xk|k−1と、時刻tkの実際の状態量Xkとの差の共分散(誤差共分散)である。なお、Iは単位行列である。
【0095】
また、観測行列Hkは、状態推定値Xkの次元を観測量Zkの次元に変換するための変換行列として用いられる。観測行列Hkを1ステップ前に予測された状態推定値Xk|k-1に作用させることで、観測量の予測値Zk,eが得られる。
【0096】
本実施形態において、観測行列Hkは以下のようになる。まず、θについては、(14)式にて表すことができる。
【0097】
【数14】
【0098】
次に、「(ax,ay,az)」については、(15)式にて表すことができる。
【0099】
【数15】
【0100】
そして、「(vN,vE,vD)」については、(16)式にて表すことができる。
【0101】
【数16】
【0102】
また、式(11)において、Kkはカルマンゲインと呼ばれる補正係数である。カルマンゲインKkは、予測された状態推定値Xk|k-1を重視するか、Zk,rとZk,eとの差Δkを重視するかを決定付けるパラメーター値として用いられる。カルマンゲインKkは、観測誤差Rkの大きさによって決定付けられる。観測誤差Rkは、観測量Zkに含まれる想定誤差の大きさを表すパラメーター(想定誤差パラメーター)である。観測誤差Rkは、期待値(平均値)を“0”とする正規分布型のホワイトノイズと仮定して設定される。
【0103】
式(12)は、Zk,rとZk,eとの差Δkを用いて、状態推定値Xk|kを更新することを表している。
【0104】
また、式(13)は、1ステップ前に予測された誤差共分散Pk|k-1とカルマンゲインKkと観測行列Hkとを用いて、誤差共分散Pk|kを更新することを表している。
【0105】
一方、予測処理は、次式(17)及び(18)で定式化される。
【0106】
【数17】
【0107】
【数18】
【0108】
本実施例においては、BkとUkは考慮しなくてもよい。また、(18)式において、Qkはシステム雑音と呼ばれ、システムのモデル誤差を表す正規分布に従う誤差行列として定義される。
【0109】
ここで、状態遷移行列Fkは、観測更新で更新された状態推定値Xk|kから次のステップの状態推定値Xk+1|kへの遷移を表す行列として定義される。
【0110】
本実施形態における状態遷移行列Fkは以下のようになる。まず、「(q0,q1,q2,q3)」については、(19)式にて表すことができる。
【0111】
【数19】
【0112】
次に、「(vN,vE,vD)」については、(20)式にて表すことができる。
【0113】
【数20】
【0114】
なお、(19)式、(20)式において、Δtはサンプリング間隔である。例えば50Hzでサンプリングされる場合、Δt=1/50[sec]である。
【0115】
また、(3)式〜(5)式及び(10)式〜(20)式にて、表される値等をまとめて、カルマンフィルターの内部状態変数と呼ぶ。
【0116】
記憶部200は、種々の情報を記憶するとともに、各部のワーク領域となるものであり、その機能はRAM等のメモリーやHDD(ハードディスクドライブ)などにより実現できる。
【0117】
以上の本実施形態では、観測により入力される観測信号に基づいて、観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部180と、観測信号を観測量に変換し、観測量を補正部160に出力する信号変換部120と、観測量の補正処理を行い、補正処理後の観測量を状態推定部180に出力する補正部160と、補正部160と状態推定部180を制御する制御部140と、を含む。そして、制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行い、補正部160は、補正指示が行われた場合に、観測量の補正処理を行い、状態推定部180は、補正指示が行われた場合に、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づいて状態推定を行う。
【0118】
これにより、まず、入力された観測信号を観測量へ変換することができる。次に、補正条件が成立したと判断する場合、又は補正条件が成立した旨を他機能部や外部制御部11から通知された場合に、観測量と内部状態変数の補正指示をし、これらの値を補正することができる。そして、補正した観測量を入力とし、内部状態変数を補正した状態で、カルマンフィルターにより、状態推定を行うことができる。
【0119】
ここで、補正条件とは、補正部160にて行う補正処理を決定付けるために設けられた判断基準である。詳しくは具体例とともに後述する。
【0120】
また、補正指示とは、補正条件が成立したことを通知するために、制御部140が補正部160及び状態推定部180に対して行う指示のことである。例えば、補正指示の一例として、補正条件成立時に、制御部140が補正部160及び状態推定部180に補正指示情報を出力することなどがある。なお、補正指示は、様々な変形が可能であり、これに限定されるものではない。例えば、補正条件成立時にのみ補正指示情報を出力するだけではなく、不成立時にも出力するが、補正指示情報に含まれる内容により、補正条件を満たしたか否かということが分かる方法でも良い。逆に、補正条件を満たさない時にのみ、制御部140が補正部160及び状態推定部180に補正指示情報を出力して、補正条件の成否を判断しても良い。他にも例えば、後述する方位角補正データの通知もって補正指示情報の通知としてもよい。
【0121】
以上より、センサー10により検出された観測信号に基づく方位角(検出値)と期待する方位角(期待値)との誤差が大きい時に補正条件を満たすように設定をしておけば、検出値が誤っている場合等に、観測量だけでなく、内部状態変数のうち、前回推定した状態推定値も補正した状態で、新たに状態推定を行うことができるようになる。
【0122】
式(12)に示すように、カルマンフィルターでは、前回推定した状態推定値を用いて、漸化式により現在の状態を濾波する。すなわち、前回推定した状態推定値の誤差が大きければ、現在の状態推定値の誤差も大きくなり、前回推定した状態推定値の誤差が小さければ、現在の状態推定値の誤差も小さくなる。例えば、上記で述べた比較例のように、観測量のみを補正した場合には、前回の状態推定値の誤差が補正されておらず、現在の状態推定値がその誤差の影響を受けてしまい、回を重ねる毎に誤差が蓄積され、元の誤った状態推定を行うようになってしまう。一方、本実施形態では、この前回の状態推定値の誤差を補正によって取り除き、前回の状態推定値を正しい値に書き換えているため、現在の状態推定において、前回までの状態推定の結果が反映されにくくなる。
【0123】
よって、観測量だけを補正して、状態推定を行う場合と比べて、補正処理後に状態推定を繰り返しても、状態推定値が補正前の値に戻りにくくすることができる。
【0124】
また、信号変換部120は、方位センサーからのセンサー信号を含む観測信号を、磁北を基準とする方位角の情報を含む観測量に変換してもよい。制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行い、方位角補正データを通知してもよい。補正部160は、補正指示が行われた場合に、制御部140から通知された方位角補正データと、磁北を真北に補正する偏角とに基づいて、観測量の補正処理を行い、補正後の観測量を状態推定部180に出力してもよい。状態推定部180は、補正指示が行われた場合に、方位角補正データに基づいて、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づいて状態推定を行ってもよい。
【0125】
これにより、方位センサーからのセンサー信号を含む観測信号を、方位角の情報を含む観測量に変換することができる。そして、方位角の情報を含む観測量と内部状態変数を補正しながら、状態推定を行うことができるようになる。
【0126】
方位角補正データとは、センサー10が検出した観測信号に基づく方位角(検出値)を、正しい方位角に補正するための情報である。例えば、検出値が磁北に対して−10度(すなわち、右手系のNED座標系で磁北に対して西に10度傾いた方向)であった時に、外部制御部により正しい方位角が−7度であると判断された場合には、+3度が方位角補正データとなる。なお、この例では角度で示したが、クォータニオン等により方位角補正データを表すことも当然可能である。また、真北を基準として、方位角補正データを算出してもよい。
【0127】
よって、本実施形態によれば、カルマンフィルターにより、方位角を推定しつつ、その推定した方位角が誤っている場合でも、補正処理により推定誤差をキャンセルし、ノイズを抑圧して、正しい方位角を推定することが可能となる。
【0128】
また、補正部160は、補正指示が行われた場合には、方位角補正データと偏角とに基づいて、観測量の補正処理を行い、補正指示が行われない場合には、偏角に基づいて、観測量の補正処理を行ってもよい。
【0129】
これにより、補正指示が行われた場合には、方位角補正データと偏角とに基づいて観測量を補正し、補正指示が行われない場合には、偏角によって観測量を補正して、状態推定を行うことができる。すなわち、本実施形態によれば、所定の補正条件が成立するか否かによって、観測量を補正する際に用いる値を変えることが可能となる。
【0130】
そのため、地磁気環境が悪い場合に、補正条件を満たすと判断する、又は判断されるようにしておけば、地磁気環境が悪い場合にのみ、方位角補正データと偏角とによって観測量を補正し、地磁気環境が良い場合には、通常用いる偏角のみを用いて観測量を補正することができるようになる。
【0131】
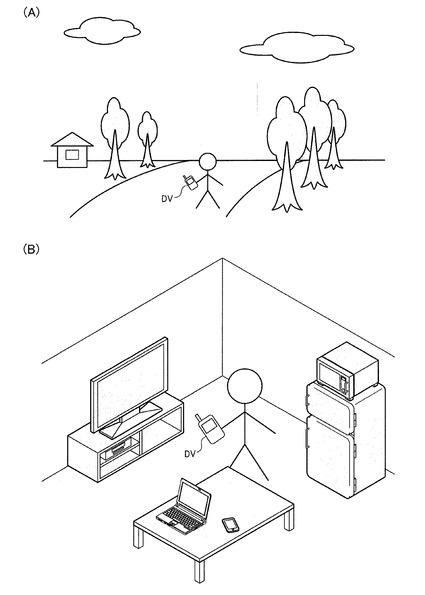
具体例を図6(A)(B)に示す。図6(A)(B)は、本実施形態が携帯端末DVにて実現されており、DVで方角推定を行う様子を示している。図6(A)のように屋外で見晴らしが良く、周囲に地磁気に影響を及ぼすものがないような地磁気環境が良い場所においては、通常用いる偏角のみを用いて、観測量を補正する。これは、地磁気環境の悪い時に与えられた方位角補正データを補正処理に用いることにより、観測量に余計な修正を加える結果となってしまい、かえって状態推定値が期待値から離れてしまうことを避けるためである。
【0132】
一方、図6(B)に示すように、屋内等で周囲に電化製品等が沢山あるような地磁気環境の悪い場所では、方位角補正データと偏角を用いて、観測量を補正する。この場合には、通常用いる偏角のみで補正処理を行ったとしても、観測量に多く含まれる誤差を除去できないためである。
【0133】
したがって、補正条件の設定に応じて、適切な補正処理を行うことが可能となる。
【0134】
また、状態推定部180は、補正指示が行われた場合には、方位角補正データに基づいて、内部状態変数の補正処理を行い、補正指示が行われない場合には、内部状態変数の補正処理を行わなくてもよい。
【0135】
これにより、補正指示が行われない場合に、前回更新した値に補正を加えていない内部状態変数と、偏角により補正された観測量とを用いて、状態推定を行うこと等が可能となる。すなわち、この場合には、観測量も内部状態変数も方位角補正データによる補正を行っていないこととなる。よって、両変数の整合性を図ることができる。その結果、補正条件を満たさない場合、例えば図6(A)のような地磁気環境が良い場合にも、ノイズを抑圧して、正しい方位角を推定することが可能となる。
【0136】
これまでに述べてきた方法により、所定の補正条件の判断により、異なる動作をする補正処理を行うことができる。以下では、補正条件の判断方法について述べる。
【0137】
地磁気センサーを用いて方位角を推定する場合、方位角の推定結果は地磁気の環境に大きな影響を受ける。すなわち、地磁気環境が良い場合と悪い場合に場合分けをして、異なる補正処理を行うことが好ましい。したがって、本実施形態では以下で述べる方法で地磁気環境の良し悪しを判断する。
【0138】
信号変換部120は、方位センサーから通知された観測信号に基づいて、全磁力を算出し、全磁力を制御部140に通知し、制御部140は、通知された全磁力に基づいて、所定の補正条件の判断をし、全磁力が所定の閾値により特定される範囲内にない場合には、所定の補正条件を満たすと判断し、全磁力が所定の閾値の範囲内にある場合には、所定の補正条件を満たさないと判断してもよい。
【0139】
これにより、方位センサーにより検出された観測信号に基づき、全磁力を算出することができ、その全磁力に基づいて、補正処理を行うか否かを決定すること等ができる。
【0140】
本来、地磁気が正しく検出された場合には、地磁気の強さを示す全磁力も全磁力の期待値に近い値になるはずである。すなわち、検出された全磁力(サンプル値)と全磁力の期待値とを比較し、サンプル値が期待値と十分に近いかどうかを判断することで、地磁気が正しく検出されたかどうかを判断することができる。さらに、地磁気が正しく検出された場合には、地磁気環境が良く、地磁気が正しく検出されなかった場合には地磁気環境が悪いと判断する。
【0141】
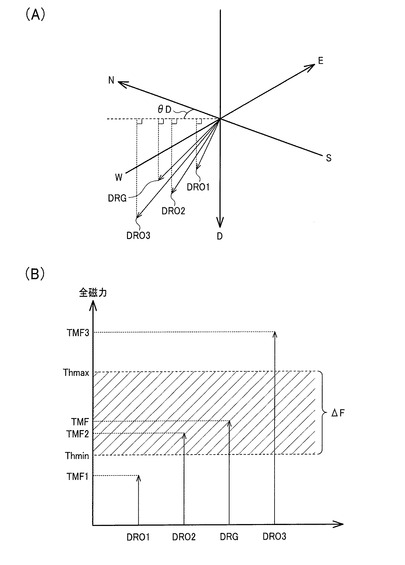
具体例を図7(A)(B)に示す。図7(A)(B)は、NED座標系において、実際の地磁気の方向(期待値)がDRGである場合を示す。ここでは、観測信号に基づき、DRO1及びDRO2、DRO3に示す地磁気が導かれた場合を考える。図7(A)に示すように、各地磁気の偏角はθDで、同一であり、各地磁気の矢印の長さがそれぞれの全磁力を表している。
【0142】
図7(B)は、図7(A)の地磁気の全磁力を縦軸とするグラフであり、DRGの全磁力をTMF、DRO1〜DRO3の全磁力をそれぞれTMF1〜TMF3として示す。
【0143】
ここでは、全磁力のサンプル値と期待値が十分に近いかどうかを判断するために、任意の全磁力の閾値ThmaxとThminを設定し、これらの閾値に挟まれる範囲ΔFを設定する。サンプル値がΔF内に含まれれば、期待値TMFに近いと判断し、地磁気環境が良いと判断する。逆に、サンプル値がΔF内に含まれなければ、期待値TMFからかけ離れていると判断し、地磁気環境が悪いと判断する。図7(B)の例においては、TMF2のみがΔF内に含まれているため、DRO2の地磁気環境は良いと判断される。逆に、TMF1とTMF3はどちらもΔF内に含まれないため、DRO1とDOR3の地磁気環境は悪いと判断される。
【0144】
このように、本実施形態では、全磁力を用いることで、地磁気環境が良いか悪いかを判定して、補正処理を行うか否かを決定すること等ができる。
【0145】
また、信号変換部120は、方位センサーから通知された観測信号に基づいて、伏角を算出し、伏角を制御部140に通知し、制御部140は、通知された伏角に基づいて、所定の補正条件の判断をし、伏角が所定の閾値により特定される範囲内にない場合には、所定の補正条件を満たすと判断し、伏角が所定の閾値の範囲内にある場合には、所定の補正条件を満たさないと判断してもよい。
【0146】
これにより、方位センサーにより検出された観測信号に基づき、伏角を算出することができ、その伏角に基づいて、補正処理を行うか否かを決定すること等ができる。
【0147】
全磁力を使って、補正条件を判断する場合と同様に、本来、地磁気が正しく検出された場合には、伏角も伏角の期待値に近い値になるはずである。すなわち、検出された伏角のサンプル値と伏角の期待値とを比較し、サンプル値が期待値と十分に近いかどうかを判断することで、地磁気が正しく検出されたかどうかを判断することができる。
【0148】
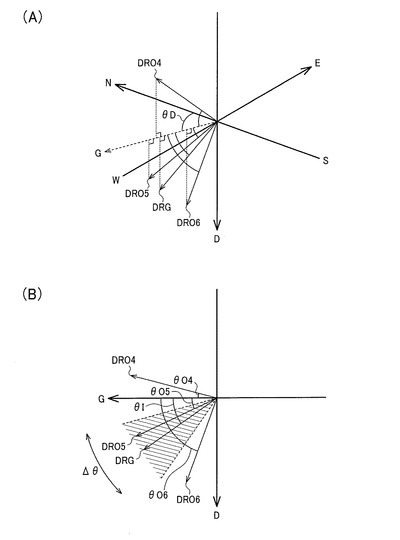
具体例を図8(A)(B)に示す。図8(A)(B)は、NED座標系において、実際の地磁気の方向(期待値)がDRGである場合を示す。ここでは、観測信号に基づき、DRO4及びDRO5、DRO6に示す地磁気が導かれた場合を考える。図8(A)に示すように、各地磁気の偏角はθDで、同一であり、N−E平面(N軸とE軸を含む平面)に対する各地磁気の矢印の角度がそれぞれの伏角を表している。
【0149】
図8(B)は、図8(A)の地磁気の伏角を表した、D軸とG軸からなる二次元グラフであり、DRGの伏角をθI、DRO4〜DRO6の伏角をそれぞれθO4〜θO6として示す。
【0150】
ここでは、伏角のサンプル値と期待値が十分に近いかどうかを判断するために、DRG方向を中心とする任意の角度範囲Δθを設定する。サンプル値がΔθ内に含まれれば、期待値θIに近いと判断し、地磁気環境が良いと判断する。逆に、サンプル値がΔθ内に含まれなければ、期待値θIからかけ離れていると判断し、地磁気環境が悪いと判断する。図8(B)の例においては、θO5のみがΔθ内に含まれているため、DRO5の地磁気環境は良いと判断される。逆に、θO4とθO6はどちらもΔθ内に含まれないため、θO4とθO6の地磁気環境は悪いと判断される。
【0151】
このように、本実施形態では、伏角を用いることで、地磁気環境が良いか悪いかを判定して、補正処理を行うか否かを決定すること等ができる。
【0152】
また、制御部140は、信号変換部120から取得した観測量をマップマッチング部16に出力し、マップマッチング部16からマップマッチングの結果を取得し、マップマッチングの結果に基づいて、所定の補正条件を判断してもよい。
【0153】
これにより、マップマッチングの結果に基づいて、補正処理を行うか否かを決定すること等ができる。
【0154】
ここで、マップマッチングの結果とは、センサー10が検出した観測信号に基づいて算出された方位角(検出値)と、方位角の期待値とを、外部に設けられたマップマッチング部16が比較した結果である。マップマッチングの結果には、検出値と期待値が一致しているか否かといった情報や、検出値と期待値の差等が含まれる。
【0155】
具体例を図9(A)(B)に示す。図9(A)は、マップマッチングの結果を使って補正条件を判定する実施形態のシステム構成の一例である。図4に示すブロック図に加えて、本実施形態の状態推定装置100の外部にマップマッチング部16があり、制御部140はマップマッチング部16から通知されるマップマッチングの結果を取得して、補正条件の判定を行う。
【0156】
図9(B)には、ユーザーUSが持つ端末が本実施形態を実現しており、図に示す位置において、方位角を検出し、マップマッチングを行う様子を示している。この場合に、例えば、DRE方向が真北であるとユーザーUSの端末が検出したとする。すると、マップマッチング部16は、実際の真北の方角DRNと、検出した方角DREとを比較し、一致しているかどうかを判断し、その結果を制御部140に通知する。制御部140は、マップマッチングの結果、方角が一致していると判定された場合には、補正指示を行わないと判断し、方角が一致していないと判定された場合には、補正指示を行うと判断し、補正部160と状態推定部180に補正指示を通知する。
【0157】
以上のように、本実施形態では、マップマッチングの結果を用い、現在検出した方位角が正しいか否かを判定することにより、地磁気環境が良いか悪いかを判定して、補正処理を行うか否かを決定すること等ができる。
【0158】
また、上記で述べた補正条件が成立しない場合でも、推定した方位角が間違っていると感じるユーザーもいる。
【0159】
そこで、制御部140は、操作部12から入力されたユーザー入力情報に基づいて、方位角補正データを特定し、補正部160及び状態推定部180に補正指示と方位角補正データとを通知し、補正部160は、補正指示が行われた場合には、方位角補正データと、偏角とに基づいて、観測量の補正処理を行い、状態推定部180は、補正指示が行われた場合には、方位角補正データに基づいて、内部状態変数の補正処理を行ってもよい。
【0160】
これにより、ユーザー入力情報に基づいて、方位角補正データを特定することができる。そして、ユーザーからの入力があった場合には、所定の補正条件の成立の如何に関わらず、補正部160と状態推定部180に、補正指示を行うことができ、この際に特定した方位角補正データも通知することができる。
【0161】
ここで、ユーザー入力情報とは、ユーザーが状態推定部180の出力として期待する方位角と、実際に状態推定部180が推定した方位角との差の情報を含む情報であり、操作部12を通じてユーザーにより入力される情報である。
【0162】
以上より、推定した方位角が間違っているとユーザーが感じた場合にも、ユーザーが補正データを入力すること等によって、本実施形態の状態推定装置に補正指示を出すことを促すことができる。その結果、ユーザーのニーズに応じた正確性を有する方位角の推定を行うことができる。
【0163】
なお本実施形態の状態推定装置等は、プログラムにより実現してもよい。この場合には、CPU等のプロセッサーがプログラムを実行することで、本実施形態の状態推定装置等が実現される。具体的には情報記憶媒体に記憶されたプログラムが読み出され、読み出されたプログラムをCPU等のプロセッサーが実行する。ここで、情報記憶媒体(コンピューターにより読み取り可能な媒体)は、プログラムやデータなどを格納するものであり、その機能は、光ディスク(DVD、CD等)、HDD(ハードディスクドライブ)、或いはメモリー(カード型メモリー、ROM等)などにより実現できる。そしてCPU等のプロセッサーは、情報記憶媒体に格納されるプログラム(データ)に基づいて本実施形態の種々の処理を行う。即ち情報記憶媒体には、本実施形態の各部としてコンピューター(操作部、処理部、記憶部、出力部を備える装置)を機能させるためのプログラム(各部の処理をコンピューターに実行させるためのプログラム)が記憶される。
【0164】
4.処理の流れ
以下では、図10及び図11のフローチャートを用いて、本実施形態の処理の流れについて説明する。
【0165】
4.1. マップマッチング結果に基づき補正条件を判断する手法の詳細
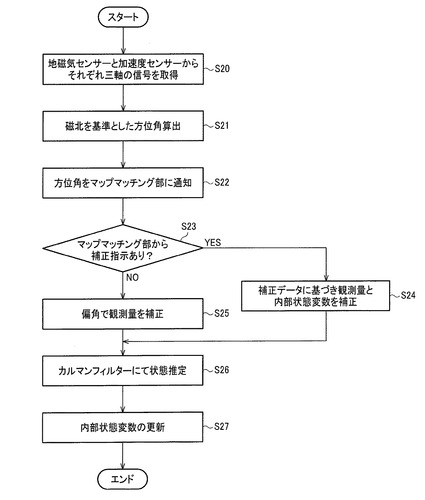
まず、信号変換部120が、センサー10の地磁気センサー及び加速度センサー、ジャイロセンサー等からそれぞれ三軸の観測信号を取得する(S20)。次に、信号変換部120は、観測信号に基づいて、磁北を基準とした方位角の情報を含む観測量を算出し(S21)、制御部140と補正部160に観測量を出力する。そして、制御部140は、観測量に表される方位角をマップマッチング部16に出力する(S22)。その後、制御部140は、マップマッチング部16から補正指示があるか否かを判断する(S23)。制御部140は、マップマッチング部16から補正指示を受けたと判断する場合には、補正部160と状態推定部180に補正指示をし、さらに、マップマッチング部16から取得した方位角補正データを通知する。そして、補正部160は、方位角補正データと偏角とに基づき、観測量を補正し、状態推定部180は、方位角補正データに基づき内部状態変数を補正する(S24)。一方、制御部140は、マップマッチング部16から補正指示を受けていないと判断する場合には、補正指示を行わず、補正部160は、偏角に基づき、観測量を補正する(S25)。観測量の補正処理が終わると、補正処理後の観測量を入力として、カルマンフィルターにより状態推定を行う(S26)。そして、最後に、カルマンフィルターの内部状態変数の更新を行う(S27)。
【0166】
本実施形態では、以上の処理を一定時間周期で行う。なお、マップマッチング部に方位角を通知し、マップマッチングを行う処理は毎回行う必要はない。この場合においては、マップマッチングを行わない場合には、前回マップマッチングを行った時と同様の補正指示と方位角補正データに基づいて補正処理を行ってもよい。
【0167】
4.2. 全磁力に基づき補正条件を判断する手法の詳細
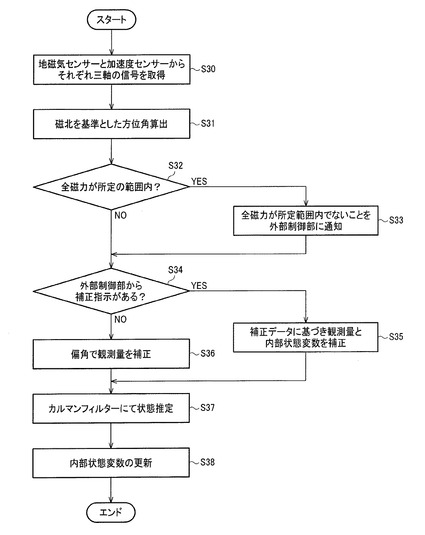
まず、信号変換部120が、センサー10の地磁気センサー及び加速度センサー、ジャイロセンサー等からそれぞれ三軸の観測信号を取得する(S30)。次に、信号変換部120は、観測信号に基づいて、磁北を基準とした方位角と全磁力との情報を含む観測量を算出し(S31)、制御部140と補正部160に観測量を出力する。そして、制御部140は、通知された全磁力が所定の範囲内である否かを判断する(S32)。制御部140は、全磁力が所定の範囲内にないと判断した場合には、その旨を外部制御部に通知する(S33)。制御部140が、全磁力が所定の範囲内にあると判断した場合、又はS33の処理後において、制御部140は、外部制御部からの補正指示があるか否かを判断する(S34)。制御部140は、外部制御部11から補正指示を受けたと判断する場合には、補正部160と状態推定部180に補正指示をし、さらに、外部制御部11から取得した方位角補正データを通知する。そして、補正部160は、方位角補正データと偏角とに基づき、観測量を補正し、状態推定部180は、方位角補正データに基づき内部状態変数を補正する(S35)。一方、制御部140は、外部制御部11から補正指示を受けていないと判断する場合には、補正指示を行わず、補正部160は、偏角に基づき、観測量を補正する(S36)。観測量の補正処理が終わると、補正処理後の観測量を入力として、カルマンフィルターにより状態推定を行う(S37)。そして、最後に、カルマンフィルターの内部状態変数の更新を行う(S38)。
【0168】
本実施形態では、以上の処理を一定時間周期で行う。なお、制御部140による、全磁力が所定の範囲内にあるか否かを判断する処理は毎回行う必要はない。この場合においては、上記処理を行わない場合には、前回上記処理を行った時と同様の補正指示と方位角補正データに基づいて補正処理を行ってもよい。
【0169】
以上のように本実施形態について詳細に説明したが、本発明の新規事項および効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例はすべて本発明の範囲に含まれるものとする。例えば、明細書又は図面において、少なくとも一度、より広義または同義な異なる用語と共に記載された用語は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。また状態推定装置及びこれを含む電子機器の構成、動作も本実施形態で説明したものに限定されず、種々の変形実施が可能である。
【符号の説明】
【0170】
10 センサー、11 外部制御部、12 操作部、14 表示部、
16 マップマッチング部、100 状態推定装置、120 信号変換部、
140 制御部、160 補正部、180 状態推定部、200 記憶部
【技術分野】
【0001】
本発明は、状態推定装置、電子機器及びプログラム等に関係する。
【背景技術】
【0002】
近年、方角や位置等を求めるシステムとして、測位システムや慣性航法システムが広く知られている。
【0003】
測位システムとしては、GPS(Global Positioning System)が広く知られており、携帯型電話機やカーナビゲーション装置等に内蔵された位置算出装置に利用されている。GPSでは、複数のGPS衛星の位置や、各GPS衛星から位置算出装置までの擬似距離等の情報に基づいて、位置算出装置の位置等を算出する。また、位置算出装置の移動前の位置と移動後の位置とのベクトルを求めることにより、位置算出装置の移動している方角を推定することもできる。
【0004】
一方、慣性航法システムは、外部からの電波による支援を得ることなく、自らに搭載する地磁気センサーや、ジャイロセンサー、加速度センサー等からの情報のみによって、自らの位置や速度、姿勢、向き等を推定する。地球上での絶対位置が分かるGPSに対して、慣性航法システムは初期位置からの相対位置を推定することができる。
【0005】
最近では、GPSや慣性航法システムを利用して、ユーザーの道案内をするサービス等も行われている。
【0006】
これらのGPSや慣性航法システムに関する発明としては特許文献1、2に記載される従来技術がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−126148号公報
【特許文献2】特開2007−276507号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
GPSは、電波状況に依存するため、地下や建物の中などでは位置や方角を正確に推定することができない。そのため、先に述べたGPSを利用する道案内サービスでは、ユーザーが地下や建物の中に入ってしまうと、十分な精度を保ちつつ、サービスを提供することができないという点が問題となる。
【0009】
一方、慣性航法システムを利用した道案内サービスは、電波状況には依存しないため、地下街等においても、精度を保ったまま道案内サービスを提供することができ、上記の問題を解決することができる。
【0010】
しかし、慣性航法システムは、地磁気センサーを用いて、方角を推定するため、地磁気環境の悪い場所では誤った方角を推定してしまうという問題がある。例えば、地磁気センサーを携帯電話やPCなどに近づけると、外部の磁場を検出してしまい、大きく誤った方角を検出してしまう。
【0011】
本発明の幾つかの態様によれば、観測量と、カルマンフィルターの内部状態変数との補正処理を行うことにより、誤った推定をした後も、元の推定精度を維持することができる状態推定装置、電子機器及びプログラム等を提供できる。
【課題を解決するための手段】
【0012】
本発明の一態様は、観測により入力される観測信号に基づいて、前記観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部と、前記観測信号を観測量に変換し、前記観測量を補正部に出力する信号変換部と、前記観測量の補正処理を行い、補正処理後の前記観測量を前記状態推定部に出力する補正部と、前記補正部と前記状態推定部を制御する制御部と、を含み、前記制御部は、所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、前記補正部は、前記補正指示が行われた場合に、前記観測量の補正処理を行い、前記状態推定部は、前記補正指示が行われた場合に、前記観測量に対応する内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とする状態推定装置に関係する。また本発明の他の態様は、上記各部としてコンピューターを機能させるプログラム、又は該プログラムを記憶したコンピューター読み取り可能な情報記憶媒体に関係する。
【0013】
本発明の一態様では、入力された観測信号を観測量へ変換する。次に、本発明の一態様では、補正条件が成立したと判断する場合、又は補正条件が成立した旨を通知された場合に、観測量と内部状態変数の補正指示が行われ、これらの値を補正する。これにより、補正した観測量を入力とし、内部状態変数を補正した状態で、カルマンフィルターにより、状態推定を行うことができる。
【0014】
また、本発明の一態様では、前記信号変換部は、方位センサーからのセンサー信号を含む観測信号を、磁北を基準とする方位角の情報を含む観測量に変換し、前記制御部は、前記所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、方位角補正データを通知し、前記補正部は、前記補正指示が行われた場合に、前記制御部から通知された前記方位角補正データと、磁北を真北に補正する偏角とに基づいて、前記観測量の補正処理を行い、補正後の前記観測量を前記状態推定部に出力し、前記状態推定部は、前記補正指示が行われた場合に、前記方位角補正データに基づいて、前記観測量に対応する前記内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行ってもよい。
【0015】
これにより、方位センサーからのセンサー信号を含む観測信号を、方位角の情報を含む観測量に変換することができる。そして、方位角の情報を含む観測量と内部状態変数を補正しながら、状態推定を行うことが可能になる。
【0016】
また、本発明の一態様では、前記補正部は、前記補正指示が行われた場合には、前記方位角補正データと前記偏角とに基づいて、前記観測量の補正処理を行い、前記補正指示が行われない場合には、前記偏角に基づいて、前記観測量の補正処理を行ってもよい。
【0017】
これにより、補正指示が行われた場合には、方位角補正データと偏角とに基づいて観測量を補正し、補正指示が行われない場合には、偏角によって観測量を補正して、状態推定を行うことができる。
【0018】
また、本発明の一態様では、前記状態推定部は、前記補正指示が行われた場合には、前記方位角補正データに基づいて、前記内部状態変数の補正処理を行い、前記補正指示が行われない場合には、前記内部状態変数の補正処理を行わなくてもよい。
【0019】
これにより、補正指示が行われない場合に、前回更新した値に補正を加えていない内部状態変数と、偏角により補正された観測量とを用いて、状態推定を行うこと等が可能となる。
【0020】
また、本発明の一態様では、前記信号変換部は、方位センサーから通知された観測信号に基づいて、全磁力を算出し、前記全磁力を前記制御部に通知し、前記制御部は、通知された前記全磁力に基づいて、前記所定の補正条件の判断をし、前記全磁力が所定の閾値により特定される範囲内にない場合には、所定の補正条件を満たすと判断し、前記全磁力が前記所定の閾値の範囲内にある場合には、所定の補正条件を満たさないと判断してもよい。
【0021】
これにより、方位センサーにより検出された観測信号に基づき、全磁力を算出することができ、その全磁力に基づいて、補正処理を行うか否かを決定すること等ができる。
【0022】
また、本発明の一態様では、前記信号変換部は、前記方位センサーから通知された観測信号に基づいて、伏角を算出し、前記伏角を前記制御部に通知し、前記制御部は、通知された前記伏角に基づいて、前記所定の補正条件の判断をし、前記伏角が所定の閾値により特定される範囲内にない場合には、前記所定の補正条件を満たすと判断し、前記伏角が前記所定の閾値の範囲内にある場合には、前記所定の補正条件を満たさないと判断してもよい。
【0023】
これにより、方位センサーにより検出された観測信号に基づき、伏角を算出することができ、その伏角に基づいて、補正処理を行うか否かを決定すること等ができる。
【0024】
また、本発明の一態様では、前記制御部は、前記信号変換部から取得した前記観測量をマップマッチング部に出力し、マップマッチング部からマップマッチングの結果を取得し、前記マップマッチングの結果に基づいて、前記所定の補正条件を判断してもよい。
【0025】
これにより、マップマッチングの結果に基づいて、補正処理を行うか否かを決定すること等ができる。
【0026】
また、本発明の一態様では、前記制御部は、操作部から入力されたユーザー入力情報に基づいて、前記方位角補正データを特定し、前記補正部及び前記状態推定部に前記補正指示と前記方位角補正データとを通知し、前記補正部は、前記補正指示が行われた場合には、前記方位角補正データと、前記偏角とに基づいて、前記観測量の補正処理を行い、前記状態推定部は、前記補正指示が行われた場合には、前記方位角補正データに基づいて、前記内部状態変数の補正処理を行ってもよい。
【0027】
これにより、ユーザー入力情報に基づいて、方位角補正データを特定することができる。そして、ユーザーからの入力があった場合には、所定の補正条件の成立の如何に関わらず、補正部と状態推定部に、補正指示を行うことができ、この際に特定した方位角補正データも通知することができる。
【0028】
また、本発明の他の態様では、前記状態推定装置を含むことを特徴とする電子機器に関係する。
【図面の簡単な説明】
【0029】
【図1】比較例を説明するフローチャート。
【図2】図2(A)〜図2(D)は、比較例の問題点の説明図。
【図3】本発明の概要を説明するフローチャート。
【図4】本実施形態の状態推定装置及びこれを含む電子機器の構成例。
【図5】偏角・伏角・全磁力の説明図。
【図6】図6(A)、図6(B)は、補正条件の説明図。
【図7】図7(A)、図7(B)は、全磁力に基づく補正条件の判定処理の説明図。
【図8】図8(A)、図8(B)は、伏角に基づく補正条件の判定処理の説明図。
【図9】図9(A)、図9(B)は、マップマッチング結果に基づく補正条件の判定の説明図。
【図10】マップマッチング結果に基づき補正条件を判断する手法のフローチャート。
【図11】全磁力に基づき補正条件を判断する手法のフローチャート。
【発明を実施するための形態】
【0030】
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。
【0031】
1.概要
ここでは、地磁気センサーや加速度センサー等から取得した観測信号に基づいて、方位角を推定する慣性航法システムを実現する状態推定装置に関する実施形態について説明する。
【0032】
慣性航法システムにおいては、地磁気センサー等から得られる観測信号を基に方位角を推定する。ただし、地磁気センサーから直接求められる方位角は、磁北を基準としたものである。そのため、地図等で一般的に用いられている真北を基準とした方位角に、観測信号から直接求めた方位角を補正する必要があり、偏角に基づきこの補正処理を行っている。
【0033】
しかし、地磁気センサーは、地磁気環境の悪い場所では誤った方位角を検出してしまうことある。例えば、地磁気センサーを携帯電話やPCなどに近づけると、外部の磁場を検出してしまい、大きく誤った方角を検出してしまう。そのため、上記の補正処理によって求められる真北を基準とした方位角も誤った値となってしまう。この後、慣性航法システムでは、カルマンフィルターを用いて現在の方位角を濾波する処理が行われるが、カルマンフィルターの入力である真北を基準とした方位角が間違っている状態が続くと、その後に推定される方位角も期待値から大きく外れたものとなってしまう。
【0034】
そこで、本実施形態の比較例として、図1のフローチャートに示すような手法が考えられる。この比較例では、まず地磁気センサーや加速度センサー等から観測信号を受信し(S1)、次に観測信号を観測量に変換する(S2)。そして、観測量に表される磁北を基準とした方位角を、真北を基準とした方位角に偏角を用いて補正する(S3)。ここで、今回検出した観測信号に基づく方位角が誤っていると判断する場合には、上記の補正処理に加えて、今回検出した観測信号に基づく方位角と、期待する方位角との差などに基づき、観測量を補正する(S3)。そして、カルマンフィルターによる状態推定を行い(S4)、カルマンフィルターの内部状態変数の更新を行う(S5)。そして、一定時間周期で、S1〜S5の処理を繰り返す。つまり、本比較例は、今回検出した観測信号に基づく方位角が誤っていると判断された若しくは判断した時に、上記手段により、入力に含まれる誤差を軽減するという手法である。
【0035】
しかし、比較例のように、観測量のみを補正した場合において、地磁気センサーによって検出される地磁気に同程度の誤差が混じり続ける場合には、図2(A)〜図2(D)に示すように濾波した結果が変化する。図2(A)は、k回目の状態推定において、実際の真北の方向がN軸方向であるが、真北の方向をEV1と濾波し、N軸とEV1の差分となる角度がθ1である場合を示している。次に、図2(B)は、k+1回目の状態推定において、前回の誤差θ1を用いて、入力値を補正した後の濾波結果を示している。図2(B)では、真北の方向をEV2と濾波し、N軸とEV2との差分となる角度がθ2となっており、濾波結果が期待値に近づいている。そして、図2(C)は、k+2回目の状態推定結果を示している。この時も図2(B)と同様に、θ1で観測量を補正しているにも関わらず、濾波した真北方向EV3とN軸の差がθ3となり、θ2よりも大きくなってしまっている。さらに、図2(D)では、k+3回目の状態推定を行っているが、濾波した真北方向EV4とN軸の差であるθ4がθ1とほぼ同じになってしまっている。つまり、比較例のように、観測量のみを補正した場合には、元の誤った方位角に濾波結果が次第に戻っていってしまうという問題が発生する。
【0036】
比較例において、図2のように濾波結果が変化してしまう原因は、カルマンフィルターの内部状態変数の中に、前回の状態推定結果を示す値などが含まれているにも関わらず、観測量のみを補正しており、観測量と内部状態変数の整合性が取れなくなっていることであると考えられる。
【0037】
そこで、この比較例の問題点に対して、本出願人は、検出される観測信号に誤差が含まれると判断される場合において、観測量の他に内部状態変数も補正する手法を提案する。
【0038】
本手法の概要を図3のフローチャートに示す。観測信号の受信(S10)、信号変換(S11)、観測量の補正(S12)は、比較例と同様である。これらの処理を行った後に、今回検出した観測信号に基づく方位角と期待する方位角との差分などに基づき、内部状態変数の補正を行う(S13)。そして、カルマンフィルターによる状態推定(S14)、内部状態変数の更新(S15)を行う。
【0039】
以下、本実施形態のシステム構成例を説明し、その後、フローチャートを用いて本実施形態における処理の詳細について説明する。
【0040】
2.カルマンフィルターの原理
以下、カルマンフィルターの概要を簡単に説明する。
【0041】
カルマンフィルターは、直接観測不可能な値を、観測可能な値を用いて精度良く推定する際に用いられる状態推定器である。
【0042】
例えば、ある時刻tkにおいて、あるシステムの観測不可能な状態量Xkを求めたい場合を考える。Xkは直接観測できない値であるが、逆にXkを用いれば、観測可能な値である観測量Zkを、(1)式で表せることが分かっている。
【0043】
【数1】
【0044】
(1)式において、kはステップ数、Xkは時刻tkにおけるシステムの状態推定値、Zkは時刻tkにおいて入力される観測量、Hkは観測行列、Vkは観測雑音を示している。なお、Hkは物理法則や測定等によって予め確定した行列である。(1)式を観測方程式という。
【0045】
また、時刻tkにおけるシステムの状態量Xkは、1ステップ前の時刻tk-1の状態量Xk-1をもとに、次のように表現されることが分かっているとする。
【0046】
【数2】
【0047】
(2)式において、Xk-1は時刻tk-1におけるシステムの状態量、Fkは状態遷移行列、Bkは駆動行列、Ukは制御入力、Wkはシステム雑音(白色雑音)を示している。なお、Fk及びBkは、物理法則や測定等によって予め確定した行列である。(2)式を状態方程式という。
【0048】
ここで、(1)式に観測により得られた観測量Zkを代入すれば、真の状態量Xkが求められるようにも思えるが、観測雑音Vkが不明であるため、(1)式から直接に真の状態量Xkを求めることはできない。
【0049】
そこで、まず、(2)式において、システム雑音Wkがないと仮定した場合を考え、その場合の(2)式に相当する(3)式により、状態推定値Xk|k-1を求める。
【0050】
【数3】
【0051】
(3)式において、Xk|k-1は時刻tk-1において推定した時刻tkのシステムの状態推定値であり、Xk-1|k-1は時刻tk-1において推定した時刻tk-1のシステムの状態推定値である。
【0052】
次に、(1)式において、観測誤差がないと仮定した場合を考え、その場合の(1)式に相当する(4)式により、観測誤差がないと仮定した場合の観測量の予測値Zk,eを求める。(4)式のXk|k-1は(3)式により求められたものである。
【0053】
【数4】
【0054】
そして、実際に観測により得られた観測量Zk,rとZk,eとの差をとる。
【0055】
【数5】
【0056】
Δkを観測残差という。観測残差は、以下の3値に起因する値である。一つ目の値は、雑音がないとした場合における、状態推定値から求めた観測量の推定値(観測推定量)と、実際の観測量との誤差である。そして、二つ目の値は、観測雑音Vkであり、三つ目の値は、システム雑音Wkである。
【0057】
さらに、観測残差Δkの共分散Skを算出する。観測残差Δkの共分散Skは、システムの状態推定値Xkから求められた観測推定量の確からしさと、観測雑音とシステム雑音がどの程度含まれているかを表すものである。つまり、観測残差Δkの共分散Skをできるだけ小さくすることができれば、観測雑音とシステム雑音を抑圧しつつ、観測推定量を確からしいものにすることができる。さらに、観測推定量の正確性が担保されれば、観測推定量を求める際に参照された状態推定値の正確さも期待できる。
【0058】
したがって、観測残差Δkの共分散Skをできるだけ小さくするように制御すれば、システムの状態推定値も確からしいものとなる。
【0059】
カルマンフィルターでは、以上の原理を基に、観測更新と予測処理との2つの処理をステップ毎に繰り返して、尤もらしい状態推定値Xkを推定する。これらの処理の詳細は、以下のシステム構成において述べる。
【0060】
3.システム構成例
次に、図4に本実施形態の状態推定装置及びこれを含む電子機器の構成例を示す。
【0061】
状態推定装置100は、信号変換部120と、制御部140と、補正部160と、状態推定部180と、記憶部200と、を含む。また、状態推定装置100を含む電子機器の例としては、センサー10や、外部制御部11、操作部12、表示部14などを含む携帯端末などが挙げられる。なお、状態推定装置100及びこれを含む電子機器は、図4の構成に限定されず、これらの一部の構成要素を省略したり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0062】
ここで、センサー10は、地磁気センサー等の方位センサーや、加速度センサー、ジャイロセンサー等のセンサーであり、観測信号を信号変換部120に出力する。方位センサーは、例えば地磁気センサー等であり、センサーの向いている方位を角度(0°〜360°)で計測する。地磁気センサーは、例えば磁場の強さによって抵抗値やインピーダンス値が増減する素子等で構成され、三軸の地磁気情報を検知する。加速度センサーは、例えば外力によって抵抗値が増減する素子等で構成され、三軸の加速度情報を検知する。ジャイロセンサーは、三軸の角速度情報を検知する。また、地磁気センサーや加速度センサー、ジャイロセンサーの機能を併せ持つセンサーを用いてもよい。さらに、地磁気情報や加速度情報から、磁北を基準とした偏角を算出し、出力するセンサーを用いてもよい。
【0063】
ここで、地磁気とは、地球が持つ磁気及びそれにより地球上に生じる磁場をいう。地磁気はベクトル量であり、大きさと方向を持つ。地磁気(地磁気ベクトル)の大きさは全磁力によって表され、地磁気の方向は偏角と伏角により表される。偏角、伏角、全磁力をまとめて、地磁気の3要素という。図5のNED座標系においては、DRGが地磁気ベクトルを示している。
【0064】
また、一般的に、方位角を求める際には、「北」を基準にするが、地磁気センサーから直接求められる「北」は磁北であり、真北とは異なる。
【0065】
磁北とは、地磁気ベクトルを水平面へ正射影した正射影ベクトルの方向のことである。言い換えると、地磁気のS極に対して、方位磁石の磁針のN極が反応して指し示す方位のことである。図5では、DRMNの方向が磁北である。
【0066】
一方、真北とは、地軸の北極点を指す方向のことを言う。一般的に、地理上で「北」と言えば、真北のことを指す。図5では、N軸方向が真北である。
【0067】
真北と磁北はずれており、磁北と真北とが形成する角のことを偏角という。例えば、東京付近では磁北は真北に対して西に約7度ずれている。右手系のNED座標系では、西に傾いている場合にマイナス、東に傾いている場合にプラスとなるように定義されるため、前述した例で言えば、東京付近では磁北は真北に対して−7度ずれているという。偏角は地域により異なる。図5では、θDが偏角である。
【0068】
さらに、地磁気ベクトルは、赤道付近を除けば、地面に対して平行ではなく、地面と斜めに交わっている。地磁気ベクトルを垂直面へ正射影した正射影ベクトルの方向と、水平面とが形成する角のことを伏角という。右手系のNED座標系では、地磁気が水平面に向かって突き刺さる方向の場合がプラス、水平面から出て行く向きの場合がマイナスとなるように定義される。伏角も地域により異なる。図5では、θIが伏角である。
【0069】
そして、地磁気の大きさを全磁力という。偏角と伏角同様、全磁力も場所によって異なる。図5では、地磁気ベクトルDRGの長さとして表されるTMFが全磁力となる。
【0070】
外部制御部11は、例えば、本実施形態の状態推定装置を搭載した携帯電子機器等に設けられ、後述する補正条件の判断を行ってもよく、方位角補正データを制御部140に通知してもよい。操作部12は、例えば本実施形態の状態推定装置を搭載した携帯電子機器等に設けられるボタン等であり、表示部14は携帯電子機器の画面等である。
【0071】
次に各部で行われる処理について説明する。
【0072】
信号変換部120は、センサー10から観測信号を取得し、観測量に変換する。そして、観測量を制御部140と補正部160とに出力する。
【0073】
ここで、観測信号とは、センサーから直接得られる情報をいう。例えば、本実施形態では、観測信号Yを(6)式のように設定する。
【0074】
【数6】
【0075】
(6)式において、θ’は磁北を基準とした方位角である。また、「(ax,ay,az)」はボディー座標系で加速度センサーが検出する重力加速度である。「(ωx,ωy,ωz)」はボディー座標系でジャイロセンサーが検出する角速度である。ただし、観測信号はここで説明したものに限定されない。例えば、ボディー座標系で地磁気センサーが検出する地磁気である「(gx,gy,gz)」などを観測信号に含んでも良い。
【0076】
また、観測量とは、カルマンフィルターの入力となる情報をいう。具体例については後述する。
【0077】
制御部140は、補正部160と状態推定部180の制御を行う。
【0078】
補正部160は、信号変換部120から取得した観測量のうち磁北を基準とした方位角θ’を、偏角θDに基づき(7)式にて補正し、真北を基準とする方位角θを算出する。
【0079】
【数7】
【0080】
状態推定部180は、補正部160から取得した補正後の観測量を入力として、カルマンフィルターにより、方位角を推定する。
【0081】
ここで、本実施形態では、観測量Zを次式(8)のように設定する。
【0082】
【数8】
【0083】
(8)式において、θは(7)式により求められた方位角である。「(ax,ay,az)」は(6)式における重力加速度と同一の値である。「(VN,VE,VD)」はNED座標系における速度の南北方向(N)、東西方向(E)及び高度方向(D)の各成分である。「(ωx,ωy,ωz)」は(6)式における角速度と同一の値である。ただし、観測量はここで説明したものに限定されない。
【0084】
また、状態量とは、システムの観測対象であるが、直接は観測不可能な値をいい、状態推定値とは、カルマンフィルターにより状態量を推定した値をいう。例えば、本実施形態では、カルマンフィルターにおいて推定対象とするシステムの状態推定値Xを次式(9)のように設定する。
【0085】
【数9】
【0086】
(9)式において、「(q0,q1,q2,q3)」はクォータニオン(四元数)を表し、「(vN,vE,vD)」はNED座標系における速度の南北方向(N)、東西方向(E)及び高度方向(D)の各成分である。
【0087】
なお、ここで説明したものに限定されず、状態量としてクォータニオンの代わりにロール・ピッチ・ヨー角を用いる方法や、速度の他に、状態量に緯度・経度・高度を追加する方法、状態量にジャイロや加速度のバイアス値を追加する方法などが可能である。
【0088】
以上の前提条件の下に、カルマンフィルターでは、観測更新と予測処理との2つの処理を繰り返し行う。観測更新とは、外部から与えられる(実際に観測した)観測量Zk,rを利用して1ステップ前に予測した状態推定値Xk|k-1及び誤差共分散Pk|k-1を更新する処理である。一方、予測処理とは、更新した状態推定値Xk|k及び誤差共分散Pk|kから次のステップの状態推定値Xk+1|k及び誤差共分散Pk+1|kを予測する処理である。そして、カルマンフィルターは、この2つの処理を繰り返すことにより、尤もらしい状態推定値Xkを推定する。
【0089】
まず、観測更新は、次式(10)〜(13)で定式化される。
【0090】
【数10】
【0091】
【数11】
【0092】
【数12】
【0093】
【数13】
【0094】
(10)〜(13)において、Skは、上述した観測残差Δkの共分散である。Pk|k-1は、時刻tk-1において推定した時刻tkのシステムの状態推定値Xk|k−1と、時刻tkの実際の状態量Xkとの差の共分散(誤差共分散)である。なお、Iは単位行列である。
【0095】
また、観測行列Hkは、状態推定値Xkの次元を観測量Zkの次元に変換するための変換行列として用いられる。観測行列Hkを1ステップ前に予測された状態推定値Xk|k-1に作用させることで、観測量の予測値Zk,eが得られる。
【0096】
本実施形態において、観測行列Hkは以下のようになる。まず、θについては、(14)式にて表すことができる。
【0097】
【数14】
【0098】
次に、「(ax,ay,az)」については、(15)式にて表すことができる。
【0099】
【数15】
【0100】
そして、「(vN,vE,vD)」については、(16)式にて表すことができる。
【0101】
【数16】
【0102】
また、式(11)において、Kkはカルマンゲインと呼ばれる補正係数である。カルマンゲインKkは、予測された状態推定値Xk|k-1を重視するか、Zk,rとZk,eとの差Δkを重視するかを決定付けるパラメーター値として用いられる。カルマンゲインKkは、観測誤差Rkの大きさによって決定付けられる。観測誤差Rkは、観測量Zkに含まれる想定誤差の大きさを表すパラメーター(想定誤差パラメーター)である。観測誤差Rkは、期待値(平均値)を“0”とする正規分布型のホワイトノイズと仮定して設定される。
【0103】
式(12)は、Zk,rとZk,eとの差Δkを用いて、状態推定値Xk|kを更新することを表している。
【0104】
また、式(13)は、1ステップ前に予測された誤差共分散Pk|k-1とカルマンゲインKkと観測行列Hkとを用いて、誤差共分散Pk|kを更新することを表している。
【0105】
一方、予測処理は、次式(17)及び(18)で定式化される。
【0106】
【数17】
【0107】
【数18】
【0108】
本実施例においては、BkとUkは考慮しなくてもよい。また、(18)式において、Qkはシステム雑音と呼ばれ、システムのモデル誤差を表す正規分布に従う誤差行列として定義される。
【0109】
ここで、状態遷移行列Fkは、観測更新で更新された状態推定値Xk|kから次のステップの状態推定値Xk+1|kへの遷移を表す行列として定義される。
【0110】
本実施形態における状態遷移行列Fkは以下のようになる。まず、「(q0,q1,q2,q3)」については、(19)式にて表すことができる。
【0111】
【数19】
【0112】
次に、「(vN,vE,vD)」については、(20)式にて表すことができる。
【0113】
【数20】
【0114】
なお、(19)式、(20)式において、Δtはサンプリング間隔である。例えば50Hzでサンプリングされる場合、Δt=1/50[sec]である。
【0115】
また、(3)式〜(5)式及び(10)式〜(20)式にて、表される値等をまとめて、カルマンフィルターの内部状態変数と呼ぶ。
【0116】
記憶部200は、種々の情報を記憶するとともに、各部のワーク領域となるものであり、その機能はRAM等のメモリーやHDD(ハードディスクドライブ)などにより実現できる。
【0117】
以上の本実施形態では、観測により入力される観測信号に基づいて、観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部180と、観測信号を観測量に変換し、観測量を補正部160に出力する信号変換部120と、観測量の補正処理を行い、補正処理後の観測量を状態推定部180に出力する補正部160と、補正部160と状態推定部180を制御する制御部140と、を含む。そして、制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行い、補正部160は、補正指示が行われた場合に、観測量の補正処理を行い、状態推定部180は、補正指示が行われた場合に、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づいて状態推定を行う。
【0118】
これにより、まず、入力された観測信号を観測量へ変換することができる。次に、補正条件が成立したと判断する場合、又は補正条件が成立した旨を他機能部や外部制御部11から通知された場合に、観測量と内部状態変数の補正指示をし、これらの値を補正することができる。そして、補正した観測量を入力とし、内部状態変数を補正した状態で、カルマンフィルターにより、状態推定を行うことができる。
【0119】
ここで、補正条件とは、補正部160にて行う補正処理を決定付けるために設けられた判断基準である。詳しくは具体例とともに後述する。
【0120】
また、補正指示とは、補正条件が成立したことを通知するために、制御部140が補正部160及び状態推定部180に対して行う指示のことである。例えば、補正指示の一例として、補正条件成立時に、制御部140が補正部160及び状態推定部180に補正指示情報を出力することなどがある。なお、補正指示は、様々な変形が可能であり、これに限定されるものではない。例えば、補正条件成立時にのみ補正指示情報を出力するだけではなく、不成立時にも出力するが、補正指示情報に含まれる内容により、補正条件を満たしたか否かということが分かる方法でも良い。逆に、補正条件を満たさない時にのみ、制御部140が補正部160及び状態推定部180に補正指示情報を出力して、補正条件の成否を判断しても良い。他にも例えば、後述する方位角補正データの通知もって補正指示情報の通知としてもよい。
【0121】
以上より、センサー10により検出された観測信号に基づく方位角(検出値)と期待する方位角(期待値)との誤差が大きい時に補正条件を満たすように設定をしておけば、検出値が誤っている場合等に、観測量だけでなく、内部状態変数のうち、前回推定した状態推定値も補正した状態で、新たに状態推定を行うことができるようになる。
【0122】
式(12)に示すように、カルマンフィルターでは、前回推定した状態推定値を用いて、漸化式により現在の状態を濾波する。すなわち、前回推定した状態推定値の誤差が大きければ、現在の状態推定値の誤差も大きくなり、前回推定した状態推定値の誤差が小さければ、現在の状態推定値の誤差も小さくなる。例えば、上記で述べた比較例のように、観測量のみを補正した場合には、前回の状態推定値の誤差が補正されておらず、現在の状態推定値がその誤差の影響を受けてしまい、回を重ねる毎に誤差が蓄積され、元の誤った状態推定を行うようになってしまう。一方、本実施形態では、この前回の状態推定値の誤差を補正によって取り除き、前回の状態推定値を正しい値に書き換えているため、現在の状態推定において、前回までの状態推定の結果が反映されにくくなる。
【0123】
よって、観測量だけを補正して、状態推定を行う場合と比べて、補正処理後に状態推定を繰り返しても、状態推定値が補正前の値に戻りにくくすることができる。
【0124】
また、信号変換部120は、方位センサーからのセンサー信号を含む観測信号を、磁北を基準とする方位角の情報を含む観測量に変換してもよい。制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行い、方位角補正データを通知してもよい。補正部160は、補正指示が行われた場合に、制御部140から通知された方位角補正データと、磁北を真北に補正する偏角とに基づいて、観測量の補正処理を行い、補正後の観測量を状態推定部180に出力してもよい。状態推定部180は、補正指示が行われた場合に、方位角補正データに基づいて、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づいて状態推定を行ってもよい。
【0125】
これにより、方位センサーからのセンサー信号を含む観測信号を、方位角の情報を含む観測量に変換することができる。そして、方位角の情報を含む観測量と内部状態変数を補正しながら、状態推定を行うことができるようになる。
【0126】
方位角補正データとは、センサー10が検出した観測信号に基づく方位角(検出値)を、正しい方位角に補正するための情報である。例えば、検出値が磁北に対して−10度(すなわち、右手系のNED座標系で磁北に対して西に10度傾いた方向)であった時に、外部制御部により正しい方位角が−7度であると判断された場合には、+3度が方位角補正データとなる。なお、この例では角度で示したが、クォータニオン等により方位角補正データを表すことも当然可能である。また、真北を基準として、方位角補正データを算出してもよい。
【0127】
よって、本実施形態によれば、カルマンフィルターにより、方位角を推定しつつ、その推定した方位角が誤っている場合でも、補正処理により推定誤差をキャンセルし、ノイズを抑圧して、正しい方位角を推定することが可能となる。
【0128】
また、補正部160は、補正指示が行われた場合には、方位角補正データと偏角とに基づいて、観測量の補正処理を行い、補正指示が行われない場合には、偏角に基づいて、観測量の補正処理を行ってもよい。
【0129】
これにより、補正指示が行われた場合には、方位角補正データと偏角とに基づいて観測量を補正し、補正指示が行われない場合には、偏角によって観測量を補正して、状態推定を行うことができる。すなわち、本実施形態によれば、所定の補正条件が成立するか否かによって、観測量を補正する際に用いる値を変えることが可能となる。
【0130】
そのため、地磁気環境が悪い場合に、補正条件を満たすと判断する、又は判断されるようにしておけば、地磁気環境が悪い場合にのみ、方位角補正データと偏角とによって観測量を補正し、地磁気環境が良い場合には、通常用いる偏角のみを用いて観測量を補正することができるようになる。
【0131】
具体例を図6(A)(B)に示す。図6(A)(B)は、本実施形態が携帯端末DVにて実現されており、DVで方角推定を行う様子を示している。図6(A)のように屋外で見晴らしが良く、周囲に地磁気に影響を及ぼすものがないような地磁気環境が良い場所においては、通常用いる偏角のみを用いて、観測量を補正する。これは、地磁気環境の悪い時に与えられた方位角補正データを補正処理に用いることにより、観測量に余計な修正を加える結果となってしまい、かえって状態推定値が期待値から離れてしまうことを避けるためである。
【0132】
一方、図6(B)に示すように、屋内等で周囲に電化製品等が沢山あるような地磁気環境の悪い場所では、方位角補正データと偏角を用いて、観測量を補正する。この場合には、通常用いる偏角のみで補正処理を行ったとしても、観測量に多く含まれる誤差を除去できないためである。
【0133】
したがって、補正条件の設定に応じて、適切な補正処理を行うことが可能となる。
【0134】
また、状態推定部180は、補正指示が行われた場合には、方位角補正データに基づいて、内部状態変数の補正処理を行い、補正指示が行われない場合には、内部状態変数の補正処理を行わなくてもよい。
【0135】
これにより、補正指示が行われない場合に、前回更新した値に補正を加えていない内部状態変数と、偏角により補正された観測量とを用いて、状態推定を行うこと等が可能となる。すなわち、この場合には、観測量も内部状態変数も方位角補正データによる補正を行っていないこととなる。よって、両変数の整合性を図ることができる。その結果、補正条件を満たさない場合、例えば図6(A)のような地磁気環境が良い場合にも、ノイズを抑圧して、正しい方位角を推定することが可能となる。
【0136】
これまでに述べてきた方法により、所定の補正条件の判断により、異なる動作をする補正処理を行うことができる。以下では、補正条件の判断方法について述べる。
【0137】
地磁気センサーを用いて方位角を推定する場合、方位角の推定結果は地磁気の環境に大きな影響を受ける。すなわち、地磁気環境が良い場合と悪い場合に場合分けをして、異なる補正処理を行うことが好ましい。したがって、本実施形態では以下で述べる方法で地磁気環境の良し悪しを判断する。
【0138】
信号変換部120は、方位センサーから通知された観測信号に基づいて、全磁力を算出し、全磁力を制御部140に通知し、制御部140は、通知された全磁力に基づいて、所定の補正条件の判断をし、全磁力が所定の閾値により特定される範囲内にない場合には、所定の補正条件を満たすと判断し、全磁力が所定の閾値の範囲内にある場合には、所定の補正条件を満たさないと判断してもよい。
【0139】
これにより、方位センサーにより検出された観測信号に基づき、全磁力を算出することができ、その全磁力に基づいて、補正処理を行うか否かを決定すること等ができる。
【0140】
本来、地磁気が正しく検出された場合には、地磁気の強さを示す全磁力も全磁力の期待値に近い値になるはずである。すなわち、検出された全磁力(サンプル値)と全磁力の期待値とを比較し、サンプル値が期待値と十分に近いかどうかを判断することで、地磁気が正しく検出されたかどうかを判断することができる。さらに、地磁気が正しく検出された場合には、地磁気環境が良く、地磁気が正しく検出されなかった場合には地磁気環境が悪いと判断する。
【0141】
具体例を図7(A)(B)に示す。図7(A)(B)は、NED座標系において、実際の地磁気の方向(期待値)がDRGである場合を示す。ここでは、観測信号に基づき、DRO1及びDRO2、DRO3に示す地磁気が導かれた場合を考える。図7(A)に示すように、各地磁気の偏角はθDで、同一であり、各地磁気の矢印の長さがそれぞれの全磁力を表している。
【0142】
図7(B)は、図7(A)の地磁気の全磁力を縦軸とするグラフであり、DRGの全磁力をTMF、DRO1〜DRO3の全磁力をそれぞれTMF1〜TMF3として示す。
【0143】
ここでは、全磁力のサンプル値と期待値が十分に近いかどうかを判断するために、任意の全磁力の閾値ThmaxとThminを設定し、これらの閾値に挟まれる範囲ΔFを設定する。サンプル値がΔF内に含まれれば、期待値TMFに近いと判断し、地磁気環境が良いと判断する。逆に、サンプル値がΔF内に含まれなければ、期待値TMFからかけ離れていると判断し、地磁気環境が悪いと判断する。図7(B)の例においては、TMF2のみがΔF内に含まれているため、DRO2の地磁気環境は良いと判断される。逆に、TMF1とTMF3はどちらもΔF内に含まれないため、DRO1とDOR3の地磁気環境は悪いと判断される。
【0144】
このように、本実施形態では、全磁力を用いることで、地磁気環境が良いか悪いかを判定して、補正処理を行うか否かを決定すること等ができる。
【0145】
また、信号変換部120は、方位センサーから通知された観測信号に基づいて、伏角を算出し、伏角を制御部140に通知し、制御部140は、通知された伏角に基づいて、所定の補正条件の判断をし、伏角が所定の閾値により特定される範囲内にない場合には、所定の補正条件を満たすと判断し、伏角が所定の閾値の範囲内にある場合には、所定の補正条件を満たさないと判断してもよい。
【0146】
これにより、方位センサーにより検出された観測信号に基づき、伏角を算出することができ、その伏角に基づいて、補正処理を行うか否かを決定すること等ができる。
【0147】
全磁力を使って、補正条件を判断する場合と同様に、本来、地磁気が正しく検出された場合には、伏角も伏角の期待値に近い値になるはずである。すなわち、検出された伏角のサンプル値と伏角の期待値とを比較し、サンプル値が期待値と十分に近いかどうかを判断することで、地磁気が正しく検出されたかどうかを判断することができる。
【0148】
具体例を図8(A)(B)に示す。図8(A)(B)は、NED座標系において、実際の地磁気の方向(期待値)がDRGである場合を示す。ここでは、観測信号に基づき、DRO4及びDRO5、DRO6に示す地磁気が導かれた場合を考える。図8(A)に示すように、各地磁気の偏角はθDで、同一であり、N−E平面(N軸とE軸を含む平面)に対する各地磁気の矢印の角度がそれぞれの伏角を表している。
【0149】
図8(B)は、図8(A)の地磁気の伏角を表した、D軸とG軸からなる二次元グラフであり、DRGの伏角をθI、DRO4〜DRO6の伏角をそれぞれθO4〜θO6として示す。
【0150】
ここでは、伏角のサンプル値と期待値が十分に近いかどうかを判断するために、DRG方向を中心とする任意の角度範囲Δθを設定する。サンプル値がΔθ内に含まれれば、期待値θIに近いと判断し、地磁気環境が良いと判断する。逆に、サンプル値がΔθ内に含まれなければ、期待値θIからかけ離れていると判断し、地磁気環境が悪いと判断する。図8(B)の例においては、θO5のみがΔθ内に含まれているため、DRO5の地磁気環境は良いと判断される。逆に、θO4とθO6はどちらもΔθ内に含まれないため、θO4とθO6の地磁気環境は悪いと判断される。
【0151】
このように、本実施形態では、伏角を用いることで、地磁気環境が良いか悪いかを判定して、補正処理を行うか否かを決定すること等ができる。
【0152】
また、制御部140は、信号変換部120から取得した観測量をマップマッチング部16に出力し、マップマッチング部16からマップマッチングの結果を取得し、マップマッチングの結果に基づいて、所定の補正条件を判断してもよい。
【0153】
これにより、マップマッチングの結果に基づいて、補正処理を行うか否かを決定すること等ができる。
【0154】
ここで、マップマッチングの結果とは、センサー10が検出した観測信号に基づいて算出された方位角(検出値)と、方位角の期待値とを、外部に設けられたマップマッチング部16が比較した結果である。マップマッチングの結果には、検出値と期待値が一致しているか否かといった情報や、検出値と期待値の差等が含まれる。
【0155】
具体例を図9(A)(B)に示す。図9(A)は、マップマッチングの結果を使って補正条件を判定する実施形態のシステム構成の一例である。図4に示すブロック図に加えて、本実施形態の状態推定装置100の外部にマップマッチング部16があり、制御部140はマップマッチング部16から通知されるマップマッチングの結果を取得して、補正条件の判定を行う。
【0156】
図9(B)には、ユーザーUSが持つ端末が本実施形態を実現しており、図に示す位置において、方位角を検出し、マップマッチングを行う様子を示している。この場合に、例えば、DRE方向が真北であるとユーザーUSの端末が検出したとする。すると、マップマッチング部16は、実際の真北の方角DRNと、検出した方角DREとを比較し、一致しているかどうかを判断し、その結果を制御部140に通知する。制御部140は、マップマッチングの結果、方角が一致していると判定された場合には、補正指示を行わないと判断し、方角が一致していないと判定された場合には、補正指示を行うと判断し、補正部160と状態推定部180に補正指示を通知する。
【0157】
以上のように、本実施形態では、マップマッチングの結果を用い、現在検出した方位角が正しいか否かを判定することにより、地磁気環境が良いか悪いかを判定して、補正処理を行うか否かを決定すること等ができる。
【0158】
また、上記で述べた補正条件が成立しない場合でも、推定した方位角が間違っていると感じるユーザーもいる。
【0159】
そこで、制御部140は、操作部12から入力されたユーザー入力情報に基づいて、方位角補正データを特定し、補正部160及び状態推定部180に補正指示と方位角補正データとを通知し、補正部160は、補正指示が行われた場合には、方位角補正データと、偏角とに基づいて、観測量の補正処理を行い、状態推定部180は、補正指示が行われた場合には、方位角補正データに基づいて、内部状態変数の補正処理を行ってもよい。
【0160】
これにより、ユーザー入力情報に基づいて、方位角補正データを特定することができる。そして、ユーザーからの入力があった場合には、所定の補正条件の成立の如何に関わらず、補正部160と状態推定部180に、補正指示を行うことができ、この際に特定した方位角補正データも通知することができる。
【0161】
ここで、ユーザー入力情報とは、ユーザーが状態推定部180の出力として期待する方位角と、実際に状態推定部180が推定した方位角との差の情報を含む情報であり、操作部12を通じてユーザーにより入力される情報である。
【0162】
以上より、推定した方位角が間違っているとユーザーが感じた場合にも、ユーザーが補正データを入力すること等によって、本実施形態の状態推定装置に補正指示を出すことを促すことができる。その結果、ユーザーのニーズに応じた正確性を有する方位角の推定を行うことができる。
【0163】
なお本実施形態の状態推定装置等は、プログラムにより実現してもよい。この場合には、CPU等のプロセッサーがプログラムを実行することで、本実施形態の状態推定装置等が実現される。具体的には情報記憶媒体に記憶されたプログラムが読み出され、読み出されたプログラムをCPU等のプロセッサーが実行する。ここで、情報記憶媒体(コンピューターにより読み取り可能な媒体)は、プログラムやデータなどを格納するものであり、その機能は、光ディスク(DVD、CD等)、HDD(ハードディスクドライブ)、或いはメモリー(カード型メモリー、ROM等)などにより実現できる。そしてCPU等のプロセッサーは、情報記憶媒体に格納されるプログラム(データ)に基づいて本実施形態の種々の処理を行う。即ち情報記憶媒体には、本実施形態の各部としてコンピューター(操作部、処理部、記憶部、出力部を備える装置)を機能させるためのプログラム(各部の処理をコンピューターに実行させるためのプログラム)が記憶される。
【0164】
4.処理の流れ
以下では、図10及び図11のフローチャートを用いて、本実施形態の処理の流れについて説明する。
【0165】
4.1. マップマッチング結果に基づき補正条件を判断する手法の詳細
まず、信号変換部120が、センサー10の地磁気センサー及び加速度センサー、ジャイロセンサー等からそれぞれ三軸の観測信号を取得する(S20)。次に、信号変換部120は、観測信号に基づいて、磁北を基準とした方位角の情報を含む観測量を算出し(S21)、制御部140と補正部160に観測量を出力する。そして、制御部140は、観測量に表される方位角をマップマッチング部16に出力する(S22)。その後、制御部140は、マップマッチング部16から補正指示があるか否かを判断する(S23)。制御部140は、マップマッチング部16から補正指示を受けたと判断する場合には、補正部160と状態推定部180に補正指示をし、さらに、マップマッチング部16から取得した方位角補正データを通知する。そして、補正部160は、方位角補正データと偏角とに基づき、観測量を補正し、状態推定部180は、方位角補正データに基づき内部状態変数を補正する(S24)。一方、制御部140は、マップマッチング部16から補正指示を受けていないと判断する場合には、補正指示を行わず、補正部160は、偏角に基づき、観測量を補正する(S25)。観測量の補正処理が終わると、補正処理後の観測量を入力として、カルマンフィルターにより状態推定を行う(S26)。そして、最後に、カルマンフィルターの内部状態変数の更新を行う(S27)。
【0166】
本実施形態では、以上の処理を一定時間周期で行う。なお、マップマッチング部に方位角を通知し、マップマッチングを行う処理は毎回行う必要はない。この場合においては、マップマッチングを行わない場合には、前回マップマッチングを行った時と同様の補正指示と方位角補正データに基づいて補正処理を行ってもよい。
【0167】
4.2. 全磁力に基づき補正条件を判断する手法の詳細
まず、信号変換部120が、センサー10の地磁気センサー及び加速度センサー、ジャイロセンサー等からそれぞれ三軸の観測信号を取得する(S30)。次に、信号変換部120は、観測信号に基づいて、磁北を基準とした方位角と全磁力との情報を含む観測量を算出し(S31)、制御部140と補正部160に観測量を出力する。そして、制御部140は、通知された全磁力が所定の範囲内である否かを判断する(S32)。制御部140は、全磁力が所定の範囲内にないと判断した場合には、その旨を外部制御部に通知する(S33)。制御部140が、全磁力が所定の範囲内にあると判断した場合、又はS33の処理後において、制御部140は、外部制御部からの補正指示があるか否かを判断する(S34)。制御部140は、外部制御部11から補正指示を受けたと判断する場合には、補正部160と状態推定部180に補正指示をし、さらに、外部制御部11から取得した方位角補正データを通知する。そして、補正部160は、方位角補正データと偏角とに基づき、観測量を補正し、状態推定部180は、方位角補正データに基づき内部状態変数を補正する(S35)。一方、制御部140は、外部制御部11から補正指示を受けていないと判断する場合には、補正指示を行わず、補正部160は、偏角に基づき、観測量を補正する(S36)。観測量の補正処理が終わると、補正処理後の観測量を入力として、カルマンフィルターにより状態推定を行う(S37)。そして、最後に、カルマンフィルターの内部状態変数の更新を行う(S38)。
【0168】
本実施形態では、以上の処理を一定時間周期で行う。なお、制御部140による、全磁力が所定の範囲内にあるか否かを判断する処理は毎回行う必要はない。この場合においては、上記処理を行わない場合には、前回上記処理を行った時と同様の補正指示と方位角補正データに基づいて補正処理を行ってもよい。
【0169】
以上のように本実施形態について詳細に説明したが、本発明の新規事項および効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例はすべて本発明の範囲に含まれるものとする。例えば、明細書又は図面において、少なくとも一度、より広義または同義な異なる用語と共に記載された用語は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。また状態推定装置及びこれを含む電子機器の構成、動作も本実施形態で説明したものに限定されず、種々の変形実施が可能である。
【符号の説明】
【0170】
10 センサー、11 外部制御部、12 操作部、14 表示部、
16 マップマッチング部、100 状態推定装置、120 信号変換部、
140 制御部、160 補正部、180 状態推定部、200 記憶部
【特許請求の範囲】
【請求項1】
観測により入力される観測信号に基づいて、前記観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部と、
前記観測信号を観測量に変換し、前記観測量を補正部に出力する信号変換部と、
前記観測量の補正処理を行い、補正処理後の前記観測量を前記状態推定部に出力する補正部と、
前記補正部と前記状態推定部を制御する制御部と、
を含み、
前記制御部は、
所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、
前記補正部は、
前記補正指示が行われた場合に、前記観測量の補正処理を行い、
前記状態推定部は、
前記補正指示が行われた場合に、前記観測量に対応する内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とする状態推定装置。
【請求項2】
請求項1において、
前記信号変換部は、
方位センサーからのセンサー信号を含む観測信号を、磁北を基準とする方位角の情報を含む観測量に変換し、
前記制御部は、
前記所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、方位角補正データを通知し、
前記補正部は、
前記補正指示が行われた場合に、前記制御部から通知された前記方位角補正データと、磁北を真北に補正する偏角とに基づいて、前記観測量の補正処理を行い、補正後の前記観測量を前記状態推定部に出力し、
前記状態推定部は、
前記補正指示が行われた場合に、前記方位角補正データに基づいて、前記観測量に対応する前記内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とする状態推定装置。
【請求項3】
請求項2において、
前記補正部は、
前記補正指示が行われた場合には、
前記方位角補正データと前記偏角とに基づいて、前記観測量の補正処理を行い、
前記補正指示が行われない場合には、
前記偏角に基づいて、前記観測量の補正処理を行うことを特徴とする状態推定装置。
【請求項4】
請求項3において、
前記状態推定部は、
前記補正指示が行われた場合には、
前記方位角補正データに基づいて、前記内部状態変数の補正処理を行い、
前記補正指示が行われない場合には、
前記内部状態変数の補正処理を行わないことを特徴とする状態推定装置。
【請求項5】
請求項2乃至4のいずれかにおいて、
前記信号変換部は、
前記方位センサーから通知された観測信号に基づいて、全磁力を算出し、前記全磁力を前記制御部に通知し、
前記制御部は、
通知された前記全磁力に基づいて、前記所定の補正条件の判断をし、前記全磁力が所定の閾値により特定される範囲内にない場合には、前記所定の補正条件を満たすと判断し、前記全磁力が前記所定の閾値の範囲内にある場合には、前記所定の補正条件を満たさないと判断することを特徴とする状態推定装置。
【請求項6】
請求項2乃至4のいずれかにおいて、
前記信号変換部は、
前記方位センサーから通知された観測信号に基づいて、伏角を算出し、前記伏角を前記制御部に通知し、
前記制御部は、
通知された前記伏角に基づいて、前記所定の補正条件の判断をし、前記伏角が所定の閾値により特定される範囲内にない場合には、前記所定の補正条件を満たすと判断し、前記伏角が前記所定の閾値の範囲内にある場合には、前記所定の補正条件を満たさないと判断することを特徴とする状態推定装置。
【請求項7】
請求項2乃至4のいずれかにおいて、
前記制御部は、
前記信号変換部から取得した前記観測量をマップマッチング部に出力し、マップマッチング部からマップマッチングの結果を取得し、前記マップマッチングの結果に基づいて、前記所定の補正条件を判断することを特徴とする状態推定装置。
【請求項8】
請求項2乃至7のいずれかにおいて、
前記制御部は、
操作部から入力されたユーザー入力情報に基づいて、前記方位角補正データを特定し、前記補正部及び前記状態推定部に前記補正指示と前記方位角補正データとを通知し、
前記補正部は、
前記補正指示が行われた場合には、前記方位角補正データと、前記偏角とに基づいて、前記観測量の補正処理を行い、
前記状態推定部は、
前記補正指示が行われた場合には、前記方位角補正データに基づいて、前記内部状態変数の補正処理を行うことを特徴とする状態推定装置。
【請求項9】
請求項1乃至8のいずれかに記載の状態推定装置を含むことを特徴とする電子機器。
【請求項10】
観測により入力される観測信号に基づいて、前記観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部と、
前記観測信号を観測量に変換し、前記観測量を補正部に出力する信号変換部と、
前記観測量の補正処理を行い、補正処理後の前記観測量を前記状態推定部に出力する補正部と、
前記補正部と前記状態推定部を制御する制御部として、
コンピューターを機能させ、
前記制御部は、
所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、
前記補正部は、
前記補正指示が行われた場合に、前記観測量の補正処理を行い、
前記状態推定部は、
前記補正指示が行われた場合に、前記観測量に対応する内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とするプログラム。
【請求項1】
観測により入力される観測信号に基づいて、前記観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部と、
前記観測信号を観測量に変換し、前記観測量を補正部に出力する信号変換部と、
前記観測量の補正処理を行い、補正処理後の前記観測量を前記状態推定部に出力する補正部と、
前記補正部と前記状態推定部を制御する制御部と、
を含み、
前記制御部は、
所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、
前記補正部は、
前記補正指示が行われた場合に、前記観測量の補正処理を行い、
前記状態推定部は、
前記補正指示が行われた場合に、前記観測量に対応する内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とする状態推定装置。
【請求項2】
請求項1において、
前記信号変換部は、
方位センサーからのセンサー信号を含む観測信号を、磁北を基準とする方位角の情報を含む観測量に変換し、
前記制御部は、
前記所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、方位角補正データを通知し、
前記補正部は、
前記補正指示が行われた場合に、前記制御部から通知された前記方位角補正データと、磁北を真北に補正する偏角とに基づいて、前記観測量の補正処理を行い、補正後の前記観測量を前記状態推定部に出力し、
前記状態推定部は、
前記補正指示が行われた場合に、前記方位角補正データに基づいて、前記観測量に対応する前記内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とする状態推定装置。
【請求項3】
請求項2において、
前記補正部は、
前記補正指示が行われた場合には、
前記方位角補正データと前記偏角とに基づいて、前記観測量の補正処理を行い、
前記補正指示が行われない場合には、
前記偏角に基づいて、前記観測量の補正処理を行うことを特徴とする状態推定装置。
【請求項4】
請求項3において、
前記状態推定部は、
前記補正指示が行われた場合には、
前記方位角補正データに基づいて、前記内部状態変数の補正処理を行い、
前記補正指示が行われない場合には、
前記内部状態変数の補正処理を行わないことを特徴とする状態推定装置。
【請求項5】
請求項2乃至4のいずれかにおいて、
前記信号変換部は、
前記方位センサーから通知された観測信号に基づいて、全磁力を算出し、前記全磁力を前記制御部に通知し、
前記制御部は、
通知された前記全磁力に基づいて、前記所定の補正条件の判断をし、前記全磁力が所定の閾値により特定される範囲内にない場合には、前記所定の補正条件を満たすと判断し、前記全磁力が前記所定の閾値の範囲内にある場合には、前記所定の補正条件を満たさないと判断することを特徴とする状態推定装置。
【請求項6】
請求項2乃至4のいずれかにおいて、
前記信号変換部は、
前記方位センサーから通知された観測信号に基づいて、伏角を算出し、前記伏角を前記制御部に通知し、
前記制御部は、
通知された前記伏角に基づいて、前記所定の補正条件の判断をし、前記伏角が所定の閾値により特定される範囲内にない場合には、前記所定の補正条件を満たすと判断し、前記伏角が前記所定の閾値の範囲内にある場合には、前記所定の補正条件を満たさないと判断することを特徴とする状態推定装置。
【請求項7】
請求項2乃至4のいずれかにおいて、
前記制御部は、
前記信号変換部から取得した前記観測量をマップマッチング部に出力し、マップマッチング部からマップマッチングの結果を取得し、前記マップマッチングの結果に基づいて、前記所定の補正条件を判断することを特徴とする状態推定装置。
【請求項8】
請求項2乃至7のいずれかにおいて、
前記制御部は、
操作部から入力されたユーザー入力情報に基づいて、前記方位角補正データを特定し、前記補正部及び前記状態推定部に前記補正指示と前記方位角補正データとを通知し、
前記補正部は、
前記補正指示が行われた場合には、前記方位角補正データと、前記偏角とに基づいて、前記観測量の補正処理を行い、
前記状態推定部は、
前記補正指示が行われた場合には、前記方位角補正データに基づいて、前記内部状態変数の補正処理を行うことを特徴とする状態推定装置。
【請求項9】
請求項1乃至8のいずれかに記載の状態推定装置を含むことを特徴とする電子機器。
【請求項10】
観測により入力される観測信号に基づいて、前記観測を行ったシステムの内部状態をカルマンフィルターにより推定する状態推定部と、
前記観測信号を観測量に変換し、前記観測量を補正部に出力する信号変換部と、
前記観測量の補正処理を行い、補正処理後の前記観測量を前記状態推定部に出力する補正部と、
前記補正部と前記状態推定部を制御する制御部として、
コンピューターを機能させ、
前記制御部は、
所定の補正条件が成立したと判断する場合、又は前記所定の補正条件が成立した旨を通知された場合に、前記補正部及び前記状態推定部に補正指示を行い、
前記補正部は、
前記補正指示が行われた場合に、前記観測量の補正処理を行い、
前記状態推定部は、
前記補正指示が行われた場合に、前記観測量に対応する内部状態変数の補正処理を行い、前記補正後の観測量と前記内部状態変数とに基づいて状態推定を行うことを特徴とするプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−198114(P2012−198114A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−62696(P2011−62696)
【出願日】平成23年3月22日(2011.3.22)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月22日(2011.3.22)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]