
状況管理装置、状況管理方法及び状況管理プログラム
【課題】指揮統制システムにおいて、全体の概括的な状況を効率的に把握させる。
【解決手段】航空機に関する情報を含む外部データを入力する入力部11と、外部データが予め指定された条件を満たすか否かを判定する条件判定部14と、外部データに基づいて航空機の存在する周辺の地図に情報を描画した画像データを生成する状況画面生成部12と、条件を満たす外部データに基づいて生成された画像データを条件とともに状況図データベースに記憶させる状況図管理部16とを備えることを特徴とする状況管理装置。
【解決手段】航空機に関する情報を含む外部データを入力する入力部11と、外部データが予め指定された条件を満たすか否かを判定する条件判定部14と、外部データに基づいて航空機の存在する周辺の地図に情報を描画した画像データを生成する状況画面生成部12と、条件を満たす外部データに基づいて生成された画像データを条件とともに状況図データベースに記憶させる状況図管理部16とを備えることを特徴とする状況管理装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空機等の目標物の状況を管理する状況管理装置、状況管理方法及び状況管理プログラムに関する。
【背景技術】
【0002】
様々な分野で、状況を把握する状況把握システムが用いられている。状況把握システムでは、例えば、航空機の現在の状況に関するデータを取得し、取得したデータから表示画面を生成して表示することがある。オペレータは表示画面を参照して現在の航空機の状況を把握することができる。また、状況把握システムでは、現在の航空機の状況を後に利用するため、現在の時刻情報とともに表示画面を全て記憶装置に蓄積し、必要になった場合に記憶装置から読み出すことがある。
【0003】
一方、全ての表示画面を記憶させるために十分な記憶容量の記憶装置がない場合もある。また、全ての表示画面を記憶装置に記憶させた場合、後に読み出す際に多数の表示画面から必要な表示画面を選択するのが困難になる。そのため、全ての表示画面を記憶装置に記憶させないようにする際には、表示画面を参照したオペレータが必要と判断した表示画面のみ選択して記憶装置に記憶させていた。
【0004】
従来、例えば、記憶装置に記憶させるデータの容量を制限するためには、重要度に応じてデータを取得したり、データに寿命を定める監視方法があった(例えば、特許文献1参照)。
【0005】
この特許文献1に記載の方法では、データの属性情報を書き替え、データの重複や重要度などを動的に管理してデータを蓄積することが考慮されているが、目標物に関する概括的な状況を把握することについては考慮されていない。
【特許文献1】特開2005−25533号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述した従来の状況把握システムでは、記憶装置に複数の静止画像である表示画面が記憶されている。そのため、オペレータが必要な表示画面を選択して表示させる際、必要な表示画面を選択するのは困難であるとともに、全体の状況を概括的に把握するのは不便であった。
【0007】
また、従来のようにオペレータの選択操作によって表示画面を記憶装置に記憶させる場合、常時オペレータが表示画面を監視している必要が生じる。また、常に同一の条件で記憶装置に記憶させる表示画面を選択することはオペレータに過度の注意力を要するとともに、記憶装置に同一の条件で表示画面が記憶されないリスクも生じる。
【0008】
従って本発明は、指揮統制システムにおいて、目標物の状況を効率的に把握することが可能な状況管理装置、状況管理方法及び状況管理プログラム提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の特徴に係る状況管理装置は、航空機に関する情報を含む外部データを入力する入力部と、外部データが予め指定された条件を満たすか否かを判定する条件判定部と、外部データに基づいて航空機の存在する周辺の地図に情報を描画した画像データを生成する状況画面生成部と、条件を満たす外部データに基づいて生成された画像データを条件とともに状況図データベースに記憶させる状況図管理部とを備える。
【発明の効果】
【0010】
本発明によれば、指揮統制システムにおいて、目標物の状況を効率的に把握することができる。
【発明を実施するための最良の形態】
【0011】
〈状況管理装置〉
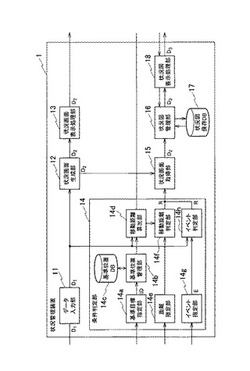
状況管理装置1は、図1に示すように、目標物(以下、航空機とする)に関する情報を含む外部データD1を入力するデータ入力部11と、外部データD1が予め指定された条件を満たすか否かを判定する条件判定部14と、外部データD1に基づいて航空機の存在する周辺の地図に情報を描画した状況画面データD2を生成する状況画面生成部12と、条件を満たす外部データD1に基づいて生成された状況画面データD2を状況図データD3として条件とともに状況図保存データベース17に記憶させる状況図管理部16とを備えている。
【0012】
状況管理装置1では、データ入力部11に、航空機が備える複数のセンサ等で検出されたデータが外部データD1として入力される。データ入力部11に入力された外部データD1は、状況画面生成部12及び条件判定部14に出力される。
【0013】
外部データD1は、センサを備える航空機自身の状況や、センサによって検出した他の航空機に関する状況であり、例えば「目標物ID」、「イベント種別」、「位置情報」、「速度」等を含んでいる。「目標物ID」は、外部データD1で情報の対象とする航空機等(目標物)の識別子である。例えば、外部データD1が航空機の飛行情報に関するものである場合、「目標物ID」は、航空機(目標物)の識別子であり、「イベント種別」は、航空機の飛行に関する情報であることを示す識別子であり、「位置情報」は、位置検出センサで検出した航空機の現在(外部データ生成時)の緯度、経度及び高度等の位置情報(現在位置)であり、「速度」は、速度検出センサで検出した航空機の飛行速度である。
【0014】
ここで、外部データD1がセンサを備える航空機自身に関するデータである場合、「目標物ID」は、このセンサを備える航空機の識別子である。一方、外部データD1が航空機のセンサが他の航空機等に関する情報を検出して生成されたものである場合、「目標物ID」は、検出した他の航空機等の識別子である。
【0015】
状況画面生成部12は、入力した外部データD1に基づいて、状況画面データD2を生成し、生成した状況画面データD2をメモリ(図示せず)に記憶させるとともに、状況画面表示処理部13に出力する。
【0016】
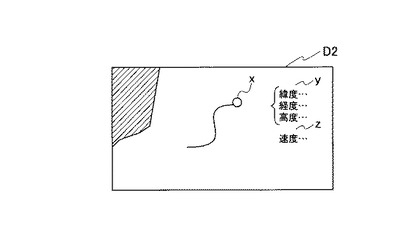
上述したように、外部データD1では、目標物ID、イベント種別、位置情報及び速度等の情報を含んでいるが、状況画面データD2は、図2で一例を示すように、位置情報によって特定される周辺の地図に目標物のシンボルx、目標物の位置情報y、目標物の速度z等が描画されたものである。
【0017】
状況画面表示処理部13は、状況画面生成部12から状況画面データD2を入力すると、接続される表示装置(図示せず)に表示させる。この状況図データD2は、リアルタイムデータであり、オペレータは、表示装置に表示される状況画面データD2を参照することで、全ての外部データD1によって特定される航空機のリアルタイムな状況を把握することができる。
【0018】
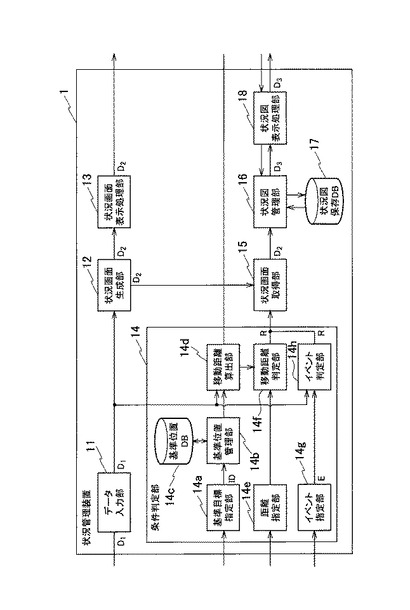
条件判定部14は、入力した外部データD1が予め指定された条件を満たすとき、状況図データD3の生成の対象であるとして、リクエストRを出力する。条件判定部14は、条件を満たすか否かの判定及びリクエストの出力を実行するため、図1に示すように、基準目標指定部14a、基準位置管理部14b、基準位置データベース(基準位置DB)14c、移動距離算出部14d、距離指定部14e、移動距離判定部14f、イベント指定部14g及びイベント判定部14hを備えている。
【0019】
基準目標指定部14aは、オペレータからの操作によって状況図データD3を生成する対象の目標物を特定する目標物IDと基準位置が入力されると、基準位置管理部14bに出力する。基準位置管理部14bは、入力された目標物IDと基準位置とを関連付けて基準位置DB14cに蓄積する。
【0020】
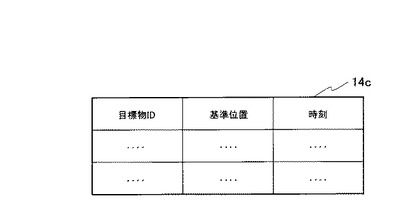
基準位置DB14cは、図3に示す一例のように、目標物IDに基準位置と時刻が関連付けられている。「基準位置」は、目標物の移動距離を算出するための基準となる位置情報であり、「時刻」は、目標物が基準位置に存在した時刻である。
【0021】
移動距離算出部14dは、基準位置DB14cで登録されている目標物に関する外部データD1を入力すると、目標物の基準位置を基準位置管理部14bを介して基準位置DB14cから抽出するとともに、抽出した基準位置と外部データD1が含む位置情報(現在位置)とを比較して、目標物が基準位置から移動した距離である移動距離I1を算出する。また、移動距離算出部14dは、算出した移動距離I1を移動距離判定部14fに出力する。
【0022】
移動距離判定部14fは、距離指定部14eを介してオペレータからの操作によって状況図データD3を生成するタイミングを特定するための距離I2が入力されると、入力された距離I2をメモリ(図示せず)に記憶させる。また、移動距離判定部14fは、移動距離算出部14dから移動距離I1を入力すると、入力した移動距離I1がメモリに記憶される距離I2を超えているか(I1≧I2であるか)否かを判定する。移動距離I1≧距離I2である場合、移動距離判定部14fは、状況図データD3の生成を要求するリクエストRを状況画面取得部15に出力する。
【0023】
このように、条件判定部14では、オペレータによって指定された目標物の移動距離I1が所定の距離I2となった場合、状況図データD3を生成させることができる。
【0024】
他に、条件判定部14では、外部データD1が特定のイベントに関するデータであるとき、状況図データD3を生成させることができる。
【0025】
状況図データD3を生成するタイミングを特定するイベント種別は、オペレータからの操作によってイベント指定部14gを介してイベント判定部14h入力され、メモリ(図示せず)に記憶される。また、イベント判定部14hは、データ入力部11から外部データD1が入力されると、外部データD1に含まれるイベント種別がメモリに記憶されるイベント種別であるか否かを判定する。外部データD1に含まれるイベント種別がメモリに記憶されるイベント種別である場合、イベント判定部14fは、状況図データD3の生成を要求するリクエストRを状況画面取得部15に出力する。
【0026】
状況画面取得部15は、移動距離判定部14f又はイベント判定部14hからリクエストRを入力すると、状況画面生成部12から、状況画面データD2を取得し、状況図管理部16に出力する。ここで取得される状況画面データD2は、条件判定部14によってリクエストRの出力の対象とされた外部データD1から生成されたデータである。
【0027】
状況図管理部16は、入力した状況画面データD2に基づいて、状況図データD3を生成する。また、状況図管理部16は、生成した状況図データD3を条件判定部14で判定に用いた条件である目標物IDやイベント種別とともに状況図保存DB17に追加して記憶させるとともに、生成した状況図データD3を状況図表示処理部18に出力する。
【0028】
状況図表示処理部18は、入力した状況図データD3を接続される表示装置に表示させる。この状況図データD3は、特定のイベントの時点における静止画のデータであり、必要になった時点で表示装置に表示されて利用される。例えば、状況図表示処理部18は、新たに生成されたタイミングで状況図データD3を表示装置に表示する。また、状況図表示処理部18は、オペレータからのリクエストによって、状況図管理部16に状況図保存DB17から読み出された状況図データD3を表示装置に表示する。
【0029】
オペレータからの状況図データD3の表示を要求するリクエストにイベント種別や目標物ID等の条件を含んでいるとき、状況図管理部16は、これらの条件で特定される状況図データD3を状況図保存DB17から読み出し、状況図表示処理部18によって表示装置に読み出された状況図データD3が表示される。
【0030】
状況管理装置1は、中央処理装置、記憶装置、メモリ、入出力インタフェース等(図示せず)を備える一般的なコンピュータである。記憶装置に記憶される状況管理プログラム(図示せず)が中央処理装置に読み出されて実行されることによって、図1に示すようにデータ入力部11、状況画面生成部12、状況画面表示処理部13、条件判定部14、状況画面取得部15、状況図管理部16及び表示処理部18を備える状況管理装置1が実現される。
【0031】
〈状況画面データ表示処理〉
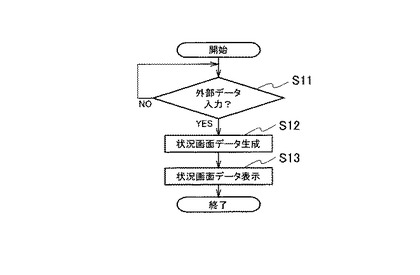
図3に示すフローチャートを用いて、状況管理装置1において外部データD1から状況画面データD2が生成される一例について説明する。
【0032】
状況管理装置1では、データ入力部11に外部データD1が入力されると(S11)、外部データD1は、状況画面生成部12に入力されて状況画面データD2が生成される(S12)。生成された状況画面データD2は、状況画面表示処理部13によって、接続される表示装置で表示される(S13)。
【0033】
〈イベント判定処理〉
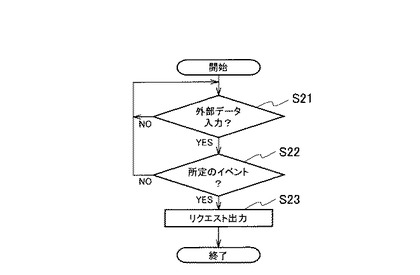
図4に示すフローチャートを用いて、状況管理装置1で外部データD1が入力された際に条件判定部14において外部データD1のイベント種別を判定することで状況図データD3を生成するか否かを判定するイベント判定処理について説明する。
【0034】
イベント判定処理が実行されるため、条件判定部14では、オペレータからイベント指定部14gに指定されたイベント種別が、予めメモリに記憶されている。
【0035】
データ入力部11から外部データD1が入力されると(S21)、イベント判定部14hは、外部データD1が含むイベントがメモリに記憶されているイベント種別であるか否かを判定する(S22)。
【0036】
入力された外部データD1のイベント種別が予めメモリに記憶されるイベント種別である場合(S22でYES)、イベント判定部14hは、状況図データD3の生成を要求するリクエストRを出力する(S23)。
【0037】
〈移動距離判定処理〉
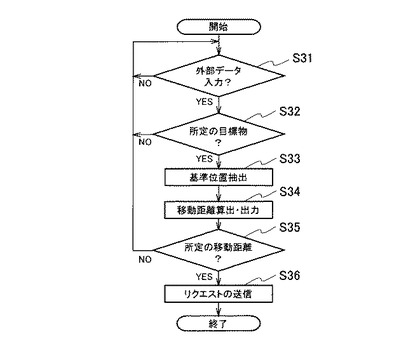
図5に示すフローチャートを用いて、状況管理装置1で外部データD1が入力された際に条件判定部14において外部データD1の移動距離を求めて状況図データD3を生成するか否かを判定する移動距離判定処理について説明する。
【0038】
条件判定部14では、オペレータから基準目標指定部14aに指定された目標物の基準位置が基準位置DB14cに蓄積されている。また、条件判定部14では、オペレータによって距離指定部14eを介して入力された移動距離との比較対象である距離I2がメモリに記憶されている。
【0039】
データ入力部11から外部データD1が入力されると(S31)、移動距離算出部14dは、外部データD1が所定の目標物に関するデータであるか否かを判定する(S32)。具体的には、移動距離算出部14dは、外部データD1が含む目標物IDの基準位置が基準位置DB14cに記憶されているか否かを判定する。
【0040】
所定の目標物に関するデータである場合、移動距離算出部14dは、基準位置DB14cから該当する目標物IDに関連付けられる基準位置を抽出し(S33)、基準位置と外部データD1が含む現在位置とから移動距離I1を算出し、移動距離判定部14fに出力する(S34)。
【0041】
移動距離判定部14fは、入力された移動距離I1が所定の距離I2以上であるか否かを判定する(S35)。
【0042】
移動距離I1が所定の距離I2以上である場合(S35でYES)、移動距離判定部14fは、状況図データD3の生成を要求するリクエストRを出力する(S36)。
【0043】
〈状況図データ管理処理〉
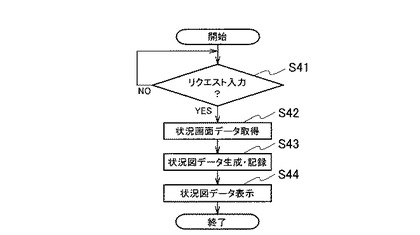
図4に示すフローチャートを用いて、状況管理装置1において条件判定部14からリクエストRが出力されて、状況図データD3が生成される処理の一例について説明する。
【0044】
リクエストRを入力した状況画面取得部15は(S41)、状況画面生成部12から状況画面データD2を取得し、状況図管理部16に出力する(S42)。
【0045】
状況図管理部16は、入力した状況画面データD2から状況図データD3を生成し、条件判定部14で外部データD1の判定に用いられた条件とともに状況図データD3を状況図保存DB17に記憶する(S43)。
【0046】
また、状況図データD3は、状況図表示処理部18によって、接続される表示装置で表示される(S44)。
【0047】
上述したように、本発明の最良の実施形態に係る状況管理装置1では、条件判定部14の判定処理によって状況図データD3の生成のタイミングを指定することができる。従って、必要な状況図データD3のみを記憶装置に記憶させることができる。
【0048】
また、状況管理装置1では、状況図データD3を条件と関連付けて記憶装置に記憶させる。従って、オペレータは条件を指定して状況図データD3を表示することができ、表示対象となる状況図データD3の選択が容易になる。
【0049】
〈変形例〉
続いて、本発明の最良の実施形態の変形例に係る状況管理装置について説明する。変形例に係る状況管理装置の構成も図1を用いて上述した状況管理装置1の構成と同一であるため、図1を用いて説明する。
【0050】
変形例に係る状況管理装置1は、所定のタイミングで基準位置DB14cに記憶される基準位置を更新する。
【0051】
例えば、移動距離判定部14fによって、移動距離I1≧距離I2であると判定されたとき、基準位置管理部14bは、基準位置DB14cの基準位置を移動距離I1の算出に利用した現在位置に更新する。この場合、状況処管理装置1の移動距離判定部14fは、移動距離I1≧距離I2であると判定し、状況図データの生成を要求するリクエストを出力する際、基準位置管理部14bに基準位置の更新を要求するリクエストを送信する。
【0052】
また例えば、特定のイベント種別を含む外部データD1が入力されたとき、基準位置管理部14bは、基準位置DB14cの基準位置を外部データD1に含まれる現在位置に更新する。この場合、データ入力部11は、外部データD1を基準位置管理部14bに出力する。又は、基準位置管理部14bは、イベント判定部14hの判定の結果を入力し、基準位置の更新に利用する。
【0053】
上述したように、所定のタイミングで基準位置DB14cに記憶される基準位置を更新することで、基準位置から所定距離移動された目標物に対して状況の管理を終了するのではなく、状況の管理を継続することができる。
【0054】
なお、上述した説明では、目標物を航空機として説明したが、移動する物体であれば、航空機に限られず、船体等の他の物体であっても同様に管理対象となる。
【0055】
本発明を上記のように実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。
【0056】
本発明はここでは記載していない様々な実施形態等を含むことは勿論である。従って、本発明の技術的範囲は上記の説明に記載した事項と自明な特許請求の範囲に係る発明特定事項によってのみ定められるものである。
【図面の簡単な説明】
【0057】
【図1】本発明の最良の実施形態に係る状況管理装置の構成を説明する機能ブロック図である。
【図2】状況管理装置の基準位置データベースの一例である。
【図3】状況画面データD2の一例である。
【図4】状況管理装置における状況画面データ表示処理の一例である。
【図5】状況管理装置におけるイベント判定処理の一例である。
【図6】状況管理装置における移動距離判定処理の一例である。
【図7】状況管理装置における状況図データ生成表示処理の一例である。
【符号の説明】
【0058】
1…状況管理装置
11…データ入力部(入力部)
12…状況画面生成部
13…状況画面表示処理部
14…条件判定部
14a…基準目標指定部
14b…基準位置管理部
14c…基準位置データベース
14d…移動距離算出部
14e…距離指定部
14f…移動距離判定部
14g…イベント指定部
14h…イベント判定部
15…状況画面取得部
16…状況図管理部
17…状況図保存データベース
18…状況図表示処理部
【技術分野】
【0001】
本発明は、航空機等の目標物の状況を管理する状況管理装置、状況管理方法及び状況管理プログラムに関する。
【背景技術】
【0002】
様々な分野で、状況を把握する状況把握システムが用いられている。状況把握システムでは、例えば、航空機の現在の状況に関するデータを取得し、取得したデータから表示画面を生成して表示することがある。オペレータは表示画面を参照して現在の航空機の状況を把握することができる。また、状況把握システムでは、現在の航空機の状況を後に利用するため、現在の時刻情報とともに表示画面を全て記憶装置に蓄積し、必要になった場合に記憶装置から読み出すことがある。
【0003】
一方、全ての表示画面を記憶させるために十分な記憶容量の記憶装置がない場合もある。また、全ての表示画面を記憶装置に記憶させた場合、後に読み出す際に多数の表示画面から必要な表示画面を選択するのが困難になる。そのため、全ての表示画面を記憶装置に記憶させないようにする際には、表示画面を参照したオペレータが必要と判断した表示画面のみ選択して記憶装置に記憶させていた。
【0004】
従来、例えば、記憶装置に記憶させるデータの容量を制限するためには、重要度に応じてデータを取得したり、データに寿命を定める監視方法があった(例えば、特許文献1参照)。
【0005】
この特許文献1に記載の方法では、データの属性情報を書き替え、データの重複や重要度などを動的に管理してデータを蓄積することが考慮されているが、目標物に関する概括的な状況を把握することについては考慮されていない。
【特許文献1】特開2005−25533号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述した従来の状況把握システムでは、記憶装置に複数の静止画像である表示画面が記憶されている。そのため、オペレータが必要な表示画面を選択して表示させる際、必要な表示画面を選択するのは困難であるとともに、全体の状況を概括的に把握するのは不便であった。
【0007】
また、従来のようにオペレータの選択操作によって表示画面を記憶装置に記憶させる場合、常時オペレータが表示画面を監視している必要が生じる。また、常に同一の条件で記憶装置に記憶させる表示画面を選択することはオペレータに過度の注意力を要するとともに、記憶装置に同一の条件で表示画面が記憶されないリスクも生じる。
【0008】
従って本発明は、指揮統制システムにおいて、目標物の状況を効率的に把握することが可能な状況管理装置、状況管理方法及び状況管理プログラム提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の特徴に係る状況管理装置は、航空機に関する情報を含む外部データを入力する入力部と、外部データが予め指定された条件を満たすか否かを判定する条件判定部と、外部データに基づいて航空機の存在する周辺の地図に情報を描画した画像データを生成する状況画面生成部と、条件を満たす外部データに基づいて生成された画像データを条件とともに状況図データベースに記憶させる状況図管理部とを備える。
【発明の効果】
【0010】
本発明によれば、指揮統制システムにおいて、目標物の状況を効率的に把握することができる。
【発明を実施するための最良の形態】
【0011】
〈状況管理装置〉
状況管理装置1は、図1に示すように、目標物(以下、航空機とする)に関する情報を含む外部データD1を入力するデータ入力部11と、外部データD1が予め指定された条件を満たすか否かを判定する条件判定部14と、外部データD1に基づいて航空機の存在する周辺の地図に情報を描画した状況画面データD2を生成する状況画面生成部12と、条件を満たす外部データD1に基づいて生成された状況画面データD2を状況図データD3として条件とともに状況図保存データベース17に記憶させる状況図管理部16とを備えている。
【0012】
状況管理装置1では、データ入力部11に、航空機が備える複数のセンサ等で検出されたデータが外部データD1として入力される。データ入力部11に入力された外部データD1は、状況画面生成部12及び条件判定部14に出力される。
【0013】
外部データD1は、センサを備える航空機自身の状況や、センサによって検出した他の航空機に関する状況であり、例えば「目標物ID」、「イベント種別」、「位置情報」、「速度」等を含んでいる。「目標物ID」は、外部データD1で情報の対象とする航空機等(目標物)の識別子である。例えば、外部データD1が航空機の飛行情報に関するものである場合、「目標物ID」は、航空機(目標物)の識別子であり、「イベント種別」は、航空機の飛行に関する情報であることを示す識別子であり、「位置情報」は、位置検出センサで検出した航空機の現在(外部データ生成時)の緯度、経度及び高度等の位置情報(現在位置)であり、「速度」は、速度検出センサで検出した航空機の飛行速度である。
【0014】
ここで、外部データD1がセンサを備える航空機自身に関するデータである場合、「目標物ID」は、このセンサを備える航空機の識別子である。一方、外部データD1が航空機のセンサが他の航空機等に関する情報を検出して生成されたものである場合、「目標物ID」は、検出した他の航空機等の識別子である。
【0015】
状況画面生成部12は、入力した外部データD1に基づいて、状況画面データD2を生成し、生成した状況画面データD2をメモリ(図示せず)に記憶させるとともに、状況画面表示処理部13に出力する。
【0016】
上述したように、外部データD1では、目標物ID、イベント種別、位置情報及び速度等の情報を含んでいるが、状況画面データD2は、図2で一例を示すように、位置情報によって特定される周辺の地図に目標物のシンボルx、目標物の位置情報y、目標物の速度z等が描画されたものである。
【0017】
状況画面表示処理部13は、状況画面生成部12から状況画面データD2を入力すると、接続される表示装置(図示せず)に表示させる。この状況図データD2は、リアルタイムデータであり、オペレータは、表示装置に表示される状況画面データD2を参照することで、全ての外部データD1によって特定される航空機のリアルタイムな状況を把握することができる。
【0018】
条件判定部14は、入力した外部データD1が予め指定された条件を満たすとき、状況図データD3の生成の対象であるとして、リクエストRを出力する。条件判定部14は、条件を満たすか否かの判定及びリクエストの出力を実行するため、図1に示すように、基準目標指定部14a、基準位置管理部14b、基準位置データベース(基準位置DB)14c、移動距離算出部14d、距離指定部14e、移動距離判定部14f、イベント指定部14g及びイベント判定部14hを備えている。
【0019】
基準目標指定部14aは、オペレータからの操作によって状況図データD3を生成する対象の目標物を特定する目標物IDと基準位置が入力されると、基準位置管理部14bに出力する。基準位置管理部14bは、入力された目標物IDと基準位置とを関連付けて基準位置DB14cに蓄積する。
【0020】
基準位置DB14cは、図3に示す一例のように、目標物IDに基準位置と時刻が関連付けられている。「基準位置」は、目標物の移動距離を算出するための基準となる位置情報であり、「時刻」は、目標物が基準位置に存在した時刻である。
【0021】
移動距離算出部14dは、基準位置DB14cで登録されている目標物に関する外部データD1を入力すると、目標物の基準位置を基準位置管理部14bを介して基準位置DB14cから抽出するとともに、抽出した基準位置と外部データD1が含む位置情報(現在位置)とを比較して、目標物が基準位置から移動した距離である移動距離I1を算出する。また、移動距離算出部14dは、算出した移動距離I1を移動距離判定部14fに出力する。
【0022】
移動距離判定部14fは、距離指定部14eを介してオペレータからの操作によって状況図データD3を生成するタイミングを特定するための距離I2が入力されると、入力された距離I2をメモリ(図示せず)に記憶させる。また、移動距離判定部14fは、移動距離算出部14dから移動距離I1を入力すると、入力した移動距離I1がメモリに記憶される距離I2を超えているか(I1≧I2であるか)否かを判定する。移動距離I1≧距離I2である場合、移動距離判定部14fは、状況図データD3の生成を要求するリクエストRを状況画面取得部15に出力する。
【0023】
このように、条件判定部14では、オペレータによって指定された目標物の移動距離I1が所定の距離I2となった場合、状況図データD3を生成させることができる。
【0024】
他に、条件判定部14では、外部データD1が特定のイベントに関するデータであるとき、状況図データD3を生成させることができる。
【0025】
状況図データD3を生成するタイミングを特定するイベント種別は、オペレータからの操作によってイベント指定部14gを介してイベント判定部14h入力され、メモリ(図示せず)に記憶される。また、イベント判定部14hは、データ入力部11から外部データD1が入力されると、外部データD1に含まれるイベント種別がメモリに記憶されるイベント種別であるか否かを判定する。外部データD1に含まれるイベント種別がメモリに記憶されるイベント種別である場合、イベント判定部14fは、状況図データD3の生成を要求するリクエストRを状況画面取得部15に出力する。
【0026】
状況画面取得部15は、移動距離判定部14f又はイベント判定部14hからリクエストRを入力すると、状況画面生成部12から、状況画面データD2を取得し、状況図管理部16に出力する。ここで取得される状況画面データD2は、条件判定部14によってリクエストRの出力の対象とされた外部データD1から生成されたデータである。
【0027】
状況図管理部16は、入力した状況画面データD2に基づいて、状況図データD3を生成する。また、状況図管理部16は、生成した状況図データD3を条件判定部14で判定に用いた条件である目標物IDやイベント種別とともに状況図保存DB17に追加して記憶させるとともに、生成した状況図データD3を状況図表示処理部18に出力する。
【0028】
状況図表示処理部18は、入力した状況図データD3を接続される表示装置に表示させる。この状況図データD3は、特定のイベントの時点における静止画のデータであり、必要になった時点で表示装置に表示されて利用される。例えば、状況図表示処理部18は、新たに生成されたタイミングで状況図データD3を表示装置に表示する。また、状況図表示処理部18は、オペレータからのリクエストによって、状況図管理部16に状況図保存DB17から読み出された状況図データD3を表示装置に表示する。
【0029】
オペレータからの状況図データD3の表示を要求するリクエストにイベント種別や目標物ID等の条件を含んでいるとき、状況図管理部16は、これらの条件で特定される状況図データD3を状況図保存DB17から読み出し、状況図表示処理部18によって表示装置に読み出された状況図データD3が表示される。
【0030】
状況管理装置1は、中央処理装置、記憶装置、メモリ、入出力インタフェース等(図示せず)を備える一般的なコンピュータである。記憶装置に記憶される状況管理プログラム(図示せず)が中央処理装置に読み出されて実行されることによって、図1に示すようにデータ入力部11、状況画面生成部12、状況画面表示処理部13、条件判定部14、状況画面取得部15、状況図管理部16及び表示処理部18を備える状況管理装置1が実現される。
【0031】
〈状況画面データ表示処理〉
図3に示すフローチャートを用いて、状況管理装置1において外部データD1から状況画面データD2が生成される一例について説明する。
【0032】
状況管理装置1では、データ入力部11に外部データD1が入力されると(S11)、外部データD1は、状況画面生成部12に入力されて状況画面データD2が生成される(S12)。生成された状況画面データD2は、状況画面表示処理部13によって、接続される表示装置で表示される(S13)。
【0033】
〈イベント判定処理〉
図4に示すフローチャートを用いて、状況管理装置1で外部データD1が入力された際に条件判定部14において外部データD1のイベント種別を判定することで状況図データD3を生成するか否かを判定するイベント判定処理について説明する。
【0034】
イベント判定処理が実行されるため、条件判定部14では、オペレータからイベント指定部14gに指定されたイベント種別が、予めメモリに記憶されている。
【0035】
データ入力部11から外部データD1が入力されると(S21)、イベント判定部14hは、外部データD1が含むイベントがメモリに記憶されているイベント種別であるか否かを判定する(S22)。
【0036】
入力された外部データD1のイベント種別が予めメモリに記憶されるイベント種別である場合(S22でYES)、イベント判定部14hは、状況図データD3の生成を要求するリクエストRを出力する(S23)。
【0037】
〈移動距離判定処理〉
図5に示すフローチャートを用いて、状況管理装置1で外部データD1が入力された際に条件判定部14において外部データD1の移動距離を求めて状況図データD3を生成するか否かを判定する移動距離判定処理について説明する。
【0038】
条件判定部14では、オペレータから基準目標指定部14aに指定された目標物の基準位置が基準位置DB14cに蓄積されている。また、条件判定部14では、オペレータによって距離指定部14eを介して入力された移動距離との比較対象である距離I2がメモリに記憶されている。
【0039】
データ入力部11から外部データD1が入力されると(S31)、移動距離算出部14dは、外部データD1が所定の目標物に関するデータであるか否かを判定する(S32)。具体的には、移動距離算出部14dは、外部データD1が含む目標物IDの基準位置が基準位置DB14cに記憶されているか否かを判定する。
【0040】
所定の目標物に関するデータである場合、移動距離算出部14dは、基準位置DB14cから該当する目標物IDに関連付けられる基準位置を抽出し(S33)、基準位置と外部データD1が含む現在位置とから移動距離I1を算出し、移動距離判定部14fに出力する(S34)。
【0041】
移動距離判定部14fは、入力された移動距離I1が所定の距離I2以上であるか否かを判定する(S35)。
【0042】
移動距離I1が所定の距離I2以上である場合(S35でYES)、移動距離判定部14fは、状況図データD3の生成を要求するリクエストRを出力する(S36)。
【0043】
〈状況図データ管理処理〉
図4に示すフローチャートを用いて、状況管理装置1において条件判定部14からリクエストRが出力されて、状況図データD3が生成される処理の一例について説明する。
【0044】
リクエストRを入力した状況画面取得部15は(S41)、状況画面生成部12から状況画面データD2を取得し、状況図管理部16に出力する(S42)。
【0045】
状況図管理部16は、入力した状況画面データD2から状況図データD3を生成し、条件判定部14で外部データD1の判定に用いられた条件とともに状況図データD3を状況図保存DB17に記憶する(S43)。
【0046】
また、状況図データD3は、状況図表示処理部18によって、接続される表示装置で表示される(S44)。
【0047】
上述したように、本発明の最良の実施形態に係る状況管理装置1では、条件判定部14の判定処理によって状況図データD3の生成のタイミングを指定することができる。従って、必要な状況図データD3のみを記憶装置に記憶させることができる。
【0048】
また、状況管理装置1では、状況図データD3を条件と関連付けて記憶装置に記憶させる。従って、オペレータは条件を指定して状況図データD3を表示することができ、表示対象となる状況図データD3の選択が容易になる。
【0049】
〈変形例〉
続いて、本発明の最良の実施形態の変形例に係る状況管理装置について説明する。変形例に係る状況管理装置の構成も図1を用いて上述した状況管理装置1の構成と同一であるため、図1を用いて説明する。
【0050】
変形例に係る状況管理装置1は、所定のタイミングで基準位置DB14cに記憶される基準位置を更新する。
【0051】
例えば、移動距離判定部14fによって、移動距離I1≧距離I2であると判定されたとき、基準位置管理部14bは、基準位置DB14cの基準位置を移動距離I1の算出に利用した現在位置に更新する。この場合、状況処管理装置1の移動距離判定部14fは、移動距離I1≧距離I2であると判定し、状況図データの生成を要求するリクエストを出力する際、基準位置管理部14bに基準位置の更新を要求するリクエストを送信する。
【0052】
また例えば、特定のイベント種別を含む外部データD1が入力されたとき、基準位置管理部14bは、基準位置DB14cの基準位置を外部データD1に含まれる現在位置に更新する。この場合、データ入力部11は、外部データD1を基準位置管理部14bに出力する。又は、基準位置管理部14bは、イベント判定部14hの判定の結果を入力し、基準位置の更新に利用する。
【0053】
上述したように、所定のタイミングで基準位置DB14cに記憶される基準位置を更新することで、基準位置から所定距離移動された目標物に対して状況の管理を終了するのではなく、状況の管理を継続することができる。
【0054】
なお、上述した説明では、目標物を航空機として説明したが、移動する物体であれば、航空機に限られず、船体等の他の物体であっても同様に管理対象となる。
【0055】
本発明を上記のように実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。
【0056】
本発明はここでは記載していない様々な実施形態等を含むことは勿論である。従って、本発明の技術的範囲は上記の説明に記載した事項と自明な特許請求の範囲に係る発明特定事項によってのみ定められるものである。
【図面の簡単な説明】
【0057】
【図1】本発明の最良の実施形態に係る状況管理装置の構成を説明する機能ブロック図である。
【図2】状況管理装置の基準位置データベースの一例である。
【図3】状況画面データD2の一例である。
【図4】状況管理装置における状況画面データ表示処理の一例である。
【図5】状況管理装置におけるイベント判定処理の一例である。
【図6】状況管理装置における移動距離判定処理の一例である。
【図7】状況管理装置における状況図データ生成表示処理の一例である。
【符号の説明】
【0058】
1…状況管理装置
11…データ入力部(入力部)
12…状況画面生成部
13…状況画面表示処理部
14…条件判定部
14a…基準目標指定部
14b…基準位置管理部
14c…基準位置データベース
14d…移動距離算出部
14e…距離指定部
14f…移動距離判定部
14g…イベント指定部
14h…イベント判定部
15…状況画面取得部
16…状況図管理部
17…状況図保存データベース
18…状況図表示処理部
【特許請求の範囲】
【請求項1】
移動する目標物の状況を管理する状況管理装置であって、
前記目標物に関する情報を含む外部データを入力する入力部と、
前記外部データが予め指定された条件を満たすか否かを判定する条件判定部と、
前記外部データに基づいて前記目標物の存在する周辺の地図に前記情報を描画した画像データを生成する状況画面生成部と、
前記条件を満たす前記外部データに基づいて生成された前記画像データを前記条件とともに状況図データベースに記憶させる状況図管理部と
を備えることを特徴とする状況管理装置。
【請求項2】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、
前記条件判定部は、前記イベントの種別が所定の種別であるとき前記条件を満たすと判定することを特徴とする請求項1記載の状況管理装置。
【請求項3】
前記外部データは、目標物に関する情報として前記目標物の現在位置を含み、
前記状況管理装置は更に、
前記目標物の移動距離を算出するための基準位置を記憶する基準位置データベースと、
前記基準位置から前記現在位置までの前記目標物の移動距離を算出する移動距離算出部とを有し、
前記条件判定部は、前記移動距離が所定の距離であるとき前記条件を満たすと判定することを特徴とする請求項1記載の状況管理装置。
【請求項4】
前記条件判定部によって前記条件を満たすと判定されたとき、前記基準位置データベースの前記基準位置を前記現在位置に更新する基準位置管理部を有することを特徴とする請求項3記載の状況管理装置。
【請求項5】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、
前記外部データが所定のイベントの種別を含むとき、前記基準位置データベースの前記基準位置を前記現在位置に更新する基準位置管理部を有することを特徴とする請求項3記載の状況管理装置。
【請求項6】
移動する目標物の状況を管理する状況管理方法であって、
前記目標物に関する情報を含む外部データを入力するステップと、
前記外部データが予め指定された条件を満たすか否かを判定するステップと、
前記外部データに基づいて前記目標物の存在する周辺の地図に前記情報を描画した画像データを生成するステップと、
前記条件を満たす前記外部データに基づいて生成された前記画像データを前記条件とともに状況図データベースに記憶させるステップと
を備えることを特徴とする状況管理方法。
【請求項7】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、前記イベントの種別が所定の種別であるとき前記条件を満たすと判定することを特徴とする請求項6記載の状況管理方法。
【請求項8】
前記外部データは、目標物に関する情報として前記目標物の現在位置を含み、
基準位置データベースで記憶される前記目標物の移動距離を算出するための基準位置から前記現在位置までの前記目標物の移動距離を算出するステップを更に有し、
前記移動距離が所定の距離であるとき前記条件を満たすと判定することを特徴とする請求項6記載の状況管理方法。
【請求項9】
移動する目標物の状況を管理する状況管理プログラムであって、
前記目標物に関する情報を含む外部データを入力するステップと、
前記外部データが予め指定された条件を満たすか否かを判定するステップと、
前記外部データに基づいて前記目標物の存在する周辺の地図に前記情報を描画した画像データを生成するステップと、
前記条件を満たす前記外部データに基づいて生成された前記画像データを前記条件とともに状況図データベースに記憶させるステップと
をコンピュータに実行させることを特徴とする状況管理プログラム。
【請求項10】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、前記イベントの種別が所定の種別であるとき前記条件を満たすと判定することを特徴とする請求項9記載の状況管理プログラム。
【請求項11】
前記外部データは、目標物に関する情報として前記目標物の現在位置を含み、
基準位置データベースで記憶される前記目標物の移動距離を算出するための基準位置から前記現在位置までの前記目標物の移動距離を算出するステップを更に有し、
前記移動距離が所定の距離であるとき前記条件を満たすと判定することを特徴とする請求項9記載の状況管理プログラム。
【請求項1】
移動する目標物の状況を管理する状況管理装置であって、
前記目標物に関する情報を含む外部データを入力する入力部と、
前記外部データが予め指定された条件を満たすか否かを判定する条件判定部と、
前記外部データに基づいて前記目標物の存在する周辺の地図に前記情報を描画した画像データを生成する状況画面生成部と、
前記条件を満たす前記外部データに基づいて生成された前記画像データを前記条件とともに状況図データベースに記憶させる状況図管理部と
を備えることを特徴とする状況管理装置。
【請求項2】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、
前記条件判定部は、前記イベントの種別が所定の種別であるとき前記条件を満たすと判定することを特徴とする請求項1記載の状況管理装置。
【請求項3】
前記外部データは、目標物に関する情報として前記目標物の現在位置を含み、
前記状況管理装置は更に、
前記目標物の移動距離を算出するための基準位置を記憶する基準位置データベースと、
前記基準位置から前記現在位置までの前記目標物の移動距離を算出する移動距離算出部とを有し、
前記条件判定部は、前記移動距離が所定の距離であるとき前記条件を満たすと判定することを特徴とする請求項1記載の状況管理装置。
【請求項4】
前記条件判定部によって前記条件を満たすと判定されたとき、前記基準位置データベースの前記基準位置を前記現在位置に更新する基準位置管理部を有することを特徴とする請求項3記載の状況管理装置。
【請求項5】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、
前記外部データが所定のイベントの種別を含むとき、前記基準位置データベースの前記基準位置を前記現在位置に更新する基準位置管理部を有することを特徴とする請求項3記載の状況管理装置。
【請求項6】
移動する目標物の状況を管理する状況管理方法であって、
前記目標物に関する情報を含む外部データを入力するステップと、
前記外部データが予め指定された条件を満たすか否かを判定するステップと、
前記外部データに基づいて前記目標物の存在する周辺の地図に前記情報を描画した画像データを生成するステップと、
前記条件を満たす前記外部データに基づいて生成された前記画像データを前記条件とともに状況図データベースに記憶させるステップと
を備えることを特徴とする状況管理方法。
【請求項7】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、前記イベントの種別が所定の種別であるとき前記条件を満たすと判定することを特徴とする請求項6記載の状況管理方法。
【請求項8】
前記外部データは、目標物に関する情報として前記目標物の現在位置を含み、
基準位置データベースで記憶される前記目標物の移動距離を算出するための基準位置から前記現在位置までの前記目標物の移動距離を算出するステップを更に有し、
前記移動距離が所定の距離であるとき前記条件を満たすと判定することを特徴とする請求項6記載の状況管理方法。
【請求項9】
移動する目標物の状況を管理する状況管理プログラムであって、
前記目標物に関する情報を含む外部データを入力するステップと、
前記外部データが予め指定された条件を満たすか否かを判定するステップと、
前記外部データに基づいて前記目標物の存在する周辺の地図に前記情報を描画した画像データを生成するステップと、
前記条件を満たす前記外部データに基づいて生成された前記画像データを前記条件とともに状況図データベースに記憶させるステップと
をコンピュータに実行させることを特徴とする状況管理プログラム。
【請求項10】
前記外部データは、前記目標物に関する情報として前記目標物に関するイベントの種別を含み、前記イベントの種別が所定の種別であるとき前記条件を満たすと判定することを特徴とする請求項9記載の状況管理プログラム。
【請求項11】
前記外部データは、目標物に関する情報として前記目標物の現在位置を含み、
基準位置データベースで記憶される前記目標物の移動距離を算出するための基準位置から前記現在位置までの前記目標物の移動距離を算出するステップを更に有し、
前記移動距離が所定の距離であるとき前記条件を満たすと判定することを特徴とする請求項9記載の状況管理プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−191765(P2008−191765A)
【公開日】平成20年8月21日(2008.8.21)
【国際特許分類】
【出願番号】特願2007−23104(P2007−23104)
【出願日】平成19年2月1日(2007.2.1)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成20年8月21日(2008.8.21)
【国際特許分類】
【出願日】平成19年2月1日(2007.2.1)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]