
独立成分選択を介したソース・ビデオ・データのフィルタリング
【課題】選択された信号成分が強調されるようにビデオ信号を再構築するためのシステムと方法を提供する。
【解決手段】選択のためにソース・ビデオ・データをその独立信号成分に減少させるための方法と、選択された成分が、ビデオ再生の間に、強調されるように、再構築される方法と、技術者が、例えば、患者の生体信号の優勢領域を視覚的に検査するために、再構築されたビデオを使用することが出来るように、元々のビデオをフィルタリングする方法を含む。
【解決手段】選択のためにソース・ビデオ・データをその独立信号成分に減少させるための方法と、選択された成分が、ビデオ再生の間に、強調されるように、再構築される方法と、技術者が、例えば、患者の生体信号の優勢領域を視覚的に検査するために、再構築されたビデオを使用することが出来るように、元々のビデオをフィルタリングする方法を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ソースデータ内の特定の情報がビデオ再生の間に視覚的に強調されるように、ビデオカメラを使用して捕捉されたソース・ビデオ・データを再構築するためのシステムと方法とに関する。
【背景技術】
【0002】
選択された信号成分が強調されるようにビデオ信号を再構築するためのシステムと方法とが開示される。選択のための独立信号成分にソース・ビデオ・データを縮小するための方法が開示される。ソースビデオは、選択された成分がビデオ再生の間に再構築されたビデオにおいて強調されるように本明細書にさらに完全に開示されたように再構築される。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本明細書に開示される方法は、技術者が、例えば、患者の生体信号の優勢領域を視覚的に検査するために、再構築されたビデオを使用することが出来るように元々のビデオをフィルタリングするための解決策を提供する。本明細書の教示は、幅広い遠隔感知用途、特に遠隔治療分野において用途を見出す。
【図面の簡単な説明】
【0004】
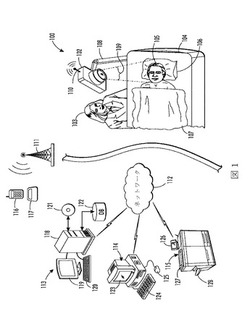
【図1】図1は、関心のある被検体の多重チャンネルのソース・ビデオ・データを捕捉するための例示的画像化ビデオセンサを説明する図である。
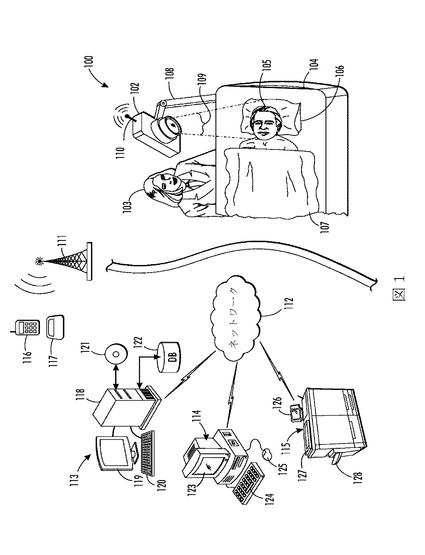
【図2】図2は、ビデオ信号を再構築するための本方法の一例示的実施形態の流れ図である。
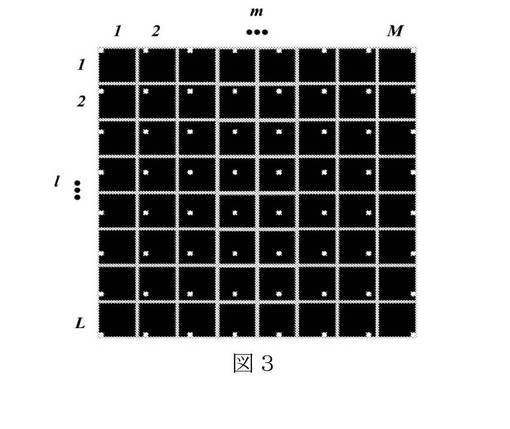
【図3】図3は、局所的セル平均化技術のための基底行列Ql,mを示す図である。
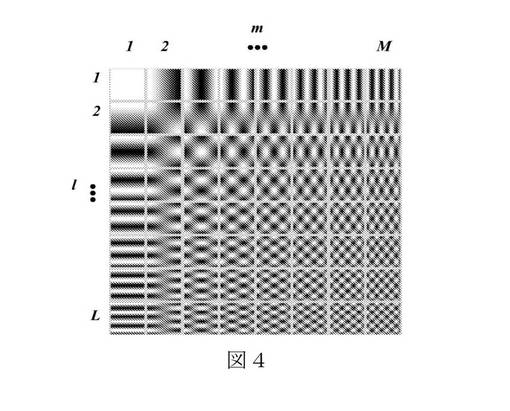
【図4】図4は、離散コサイン変換のための基底行列Ql,mを示す図である。
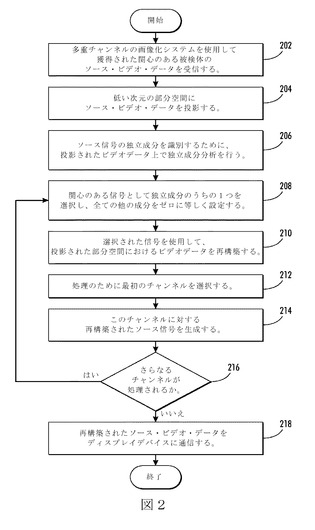
【図5】図5は、図2の流れ図に関して考察された実施形態のブロック図である。
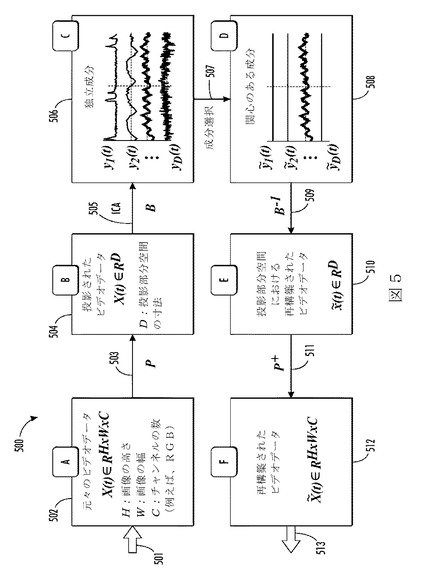
【図6】図6は、図2の流れ図と図5のブロック図とに関して記載された、本方法の様々な態様を実装することが出来る一例示的処理システムのブロック図である。
【図7】図7は、図2の流れ図と図5および図6のモジュールとに関して記載されたような、本方法の様々な態様を実装するための一例示的特殊目的コンピュータのブロック図である。
【発明を実施するための形態】
【0005】
本明細書において使用されるように、「関心のある被検体」はヒトを指す。「ヒト」、「人」、または「患者」という用語が、この文章全体を通して使用され得るが、関心のある被検体は、動物、爬虫類、または昆虫や植物など、ヒト以外のものでもあり得る。従って、「人」または「患者」という用語の説明的使用は、添付の特許請求の範囲の領域をヒトの被検体に限定すると見られるべきではない。関心のある一例示的被検体は、図1の105で示される。
【0006】
「関心のある信号」は、例えば、まばたき、けいれんなどの体の動きを含む、心臓鼓動の信号、血流、呼吸、CO2濃度、汗、脳波信号などの意味のあるデータを含む独立成分分析を介して取得される独立成分のうちの1つである。
【0007】
「画像化ビデオセンサ」は、多重チャンネルによってソース・ビデオ・データを捕捉することが出来るデバイスである。一実施形態において、画像化ビデオセンサは、高いフレームレートと高い空間分解能とを有するデバイスを備え、例えば、黒/白ビデオ画像を捕捉するためのモノクロカメラ、またはカラービデオ画像を捕捉するためのカラーカメラなどを備える。画像化ビデオセンサは、マルチスペクトルまたはハイパースペクトルのビデオシステムなどのスペクトルセンサであってもよい。スペクトルセンサは、比較的に低いフレームレートと低い空間分解能とを有するが、高いスペクトル分解能を有するデバイスである。画像化ビデオセンサは、デュアルモード、すなわち、高いフレームレートと高い空間分解能とを有する従来のビデオモードと、低いフレームレートを有するが高いスペクトル分解能を有するスペクトルモードとで動作することが出来るハイブリッドデバイスであってもよい。標準的なビデオカメラを備える画像化ビデオセンサと、スペクトルセンサを備える画像化ビデオセンサとは、商業の様々な流れにおいて販売業者から容易に入手可能である。一例示的画像化ビデオセンサは、図1のビデオセンサ102に関して示され考察される。
【0008】
「ソース・ビデオ・データ」は、多重チャンネルによってビデオデータを獲得することが出来る画像化ビデオセンサを使用して捕捉される関心のある被検体のビデオデータを指す。
【0009】
本明細書において使用されるように、「正則一次変換」は、応用数学の分野において充分に理解されるように、局所的セル平均化、離散コサイン変換、または主成分分析を指す。セル平均化は、データがデータストリーム内においてセルを導くことと遅れさせることとから抽出される充分に理解された技術である。離散コサイン変換(DCT)は異なる周波数で発振するコサイン関数の合計によって一連のデータポイントを表すための充分に確立された技術である。主成分分析(PCA)は、主成分と呼ばれる一組の無相関変数の値に、相関する可能性のある一組の変数の記録を変換するために直交変換を使用する。
【0010】
「独立成分分析」(ICA)は、観察されたデータの「独立成分」と呼ばれる基本ソースの線形混合で構成される一組の記録から独立ソース信号成分を明らかにするための分解方法である。ICAは、(不相関係数とは対象的に)データ内の統計学的に独立した係数を探すことによってソース信号における独立成分(IC)を明らかにする。結果としての成分の順序は任意である。概して、ICAは、追加の定数をさらに用いることなく減少されることが出来ない固有の不確定性を有する。
【0011】
「ムーア−ペンローズの擬似逆行列」は、行列Aの一般逆行列を指し、その一般逆行列は、Aの逆行列に関する一部の特性を有するが、必ずしも特性の全てを有するわけではない。一般逆行列は、可逆的な行列よりも幅広い種類の行列に対する逆行列として働くことが出来る行列を取得するように構築される。典型的には、一般逆行列は任意の行列に対して存在し、行列が逆行列を有する時には、その逆行列と一般逆行列とは同じである。「擬似逆行列」という用語は、通常、ムーア−ペンローズの擬似逆行列を指すことを当業者は理解するであろう。
【0012】
「遠隔感知環境」は、非接触非侵襲性感知を指し、すなわち、感知デバイスが、感知されている被検体に物理的に接触しない。感知デバイスは、例えば、1インチ未満の近さから、(遠隔治療の場合には)数マイルまで被検体から離れた任意の距離にあることが出来る。その環境は、例えば、病院、救急車、医務室など任意の状況であり得る。
【0013】
ここで図1に参照が行われる。図1は、関心のある被検体の多重チャンネルのソース・ビデオ・データを捕捉するための例示的な画像化ビデオセンサを説明する。
【0014】
図1は、ベッド104の横で技術者103によって動作される画像化ビデオセンサ102を有する検査室100を示し、その検査室に、関心のある被検体105がシート107によって覆われながら彼/彼女の頭を枕106に載せて示される。画像化ビデオセンサ102は、視野109が看護師によって患者に向けられることが出来るように支持アーム108に回転可能に固定される。支持アームは、画像化ビデオセンサが、ベッドからベッドへ、そして部屋から部屋へ動かされることが出来るように一組の車輪上にある。患者105はベッド上で仰向け位置で示されるが、被検体が、例えば、車椅子などの他の補助デバイスに配置される間、または歩くことを含む起立して配置される間に、関心のある被検体の画像が捕捉されることが出来ることを理解されたい。図1の実施形態は、あらゆる点で、添付の特許請求の領域を限定すると見なされるように意図されていない。
【0015】
画像化ビデオセンサ102は、多重チャンネルのデータを捕捉し、単一の画像化ビデオセンサ、または複数の個々のもしくは別個の画像化ビデオ・センサ・ユニットを含む画像化ビデオセンサのアレイであってもよい。中央プロセッサユニット(CPU)は、画像化ビデオセンサに不可欠であり、メモリと通信する。アンテナ110は、捕捉されたソース・ビデオ・データを通信デバイス111に通信するために使用され、通信デバイスは、ビデオ信号を受信し、複数のデバイスにビデオデータを通信する。トランスミッタ110は、ケーブルを利用した有線接続、およびタワー111および/またはネットワーク112と通信するハブであってもよい。画像化ビデオセンサ102は、有線および/またはワイヤレスの素子を組み込んでもよく、ケーブル、無線周波、または当該分野において公知の通信のためのその他任意の方法などの他の手段を介して接続されてもよい。ネットワーク112は、タワー111から伝送された信号を受信し、ワークステーション113、グラフィカル・ディスプレイ・デバイス114、および/または多機能印刷システムデバイス115に信号をワイヤレス通信することが出来る。信号伝送システム111はまた、ハンドヘルドのセル方式デバイス116およびiPad117と通信する。ワークステーション113およびデバイス114は、デバイス116および117と画像化ビデオセンサ102を含むネットワーク112によって、互いに、そして多機能デバイス115と通信する。ネットワーク接続されたそのような感知環境は、全体的に、単一の建物もしくはキャンパスの領域内に組み込まれてもよく、または幅広く離散されたネットワーク全体に及ぶ異なる位置に分散されてもよい。
【0016】
ネットワーク112の態様は、一般的に公知であり、ワールド・ワイド・ウェブを含んでもよい。特定のネットワーク構成の構築および/または動作に関するさらなる考察は省略される。敢えて言えば、データは、例えば、電子信号、電磁信号、光学信号、光信号、または他の信号であり得る信号の形態で伝達される。これらの信号は、サーバなどの通信デバイスに提供され、その通信デバイスは、ワイヤ、ケーブル、光ファイバ、電話回線、セル方式接続、RF、衛星、または他の媒体もしくは通信経路によってデータパケットを送受信する。
【0017】
マザーボードと、CPUと、メモリと、インタフェースと、ストレージデバイスと、ネットワークカードとを収容するコンピュータケース118を備えるコンピュータ113が示される。コンピュータシステムはまた、CRTまたはLDCなどのディスプレイ119を含む。英数字キーボード120とマウス(図示せず)は、コンピュータがユーザ入力を受け入れるためのメカニズムを提供する。コンピュータ読取可能な媒体121は、本方法の様々な態様を実装するための機械実行可能な命令を有する。コンピュータシステム113はデータベース122を実装し、データベースにおいて、様々な記録が、格納され、操作され、そして、クエリに応答して引き出される。データベースは外部のデバイスとして示されるが、データベースは、コンピュータケース118に対して内部にあってもよく、コンピュータケースの中のハードディスクに設置されてもよい。記録は、情報を含むことが出来る任意のデータ構造を指し、その情報は、索引をつけられ、格納され、検索され、そして、クエリに応答して引き出されることが出来る。そのような構築物は、ソフトウェアおよびデータベースの分野において充分に確立されている。
【0018】
コンピュータプラットフォームは、インストールされたアプリケーションをホストするためにサーバ・ソフトウェア・プログラムを実行する(またはサーバハードウェアを収容する)ことが出来る。そのようなアプリケーションは、商業の様々な流れにおいて販売業者から容易に入手可能である。コンピュータプラットフォーム113はさらに、リクエストされたアプリケーションをホストするプラットフォームにクライアントデバイスから、アプリケーションに対するリクエストを導き、リクエストしているクライアントデバイスにホストデバイスから応答をリダイレクトするためのサービスプロキシを作成し走らせることが出来きてもよい。コンピュータプラットフォームは、ビデオシステム102内にあるコントローラモジュールに乗って存在するプロセッサに対するサーバとして働いてもよい。コンピュータプラットフォームは、代替的に、ラップトップ、サーバ、メインフレームなどのうちの任意のものであってもよい。図1の技術者103などのユーザによる視覚的再検討のための捕捉された様々な画像の提示のためのディスプレイデバイス123を備えるコンピュータ114が示される。コンピュータ114は、様々な画像の操作を可能にすると共に、本明細書の教示に従った関心のある1つ以上の信号の選択のためにキーボード124とマウス125とを含む。
【0019】
画像の視覚的表示のためと、ユーザが複数のデバイス固有の環境のうちのいずれかに対してデバイスを構成することを可能にするためとのユーザインタフェース126を有する印刷システムを備える印刷システムデバイス115が示される。プリンタ115は、元々のビデオ画像のうちの1つ以上、および/またはハードコピー印刷のために再構築されたビデオ画像のうちの1つ以上を減少させるために使用されてもよい。スキャナ127は、文書、および印刷されたビデオ画像が電磁形式にスキャニングされ、別のデバイスに伝送されることを可能にする。紙のトレイ128は、出力された印刷物を受け取る。ユーザインタフェース(UI)126を含む多機能デバイス115が示され、そのユーザインタフェースは、アイコンと、他の選択可能なメニュー選択肢と、本方法の動作に応答して表示される情報とのユーザインタフェース上での表示のためのものである。グラフィカルUIは、タッチセンサー表面を介してユーザ入力を受信するためのタッチ・スクリーン・ディスプレイを含み、そして、キーボード、キーパッド、マウス、タッチパッドなどのうちの任意のものをさらに含んでもよい。
【0020】
ビデオシステム102を含む図1のデバイスの全てが、全体としてネットワークを形成する。図1のデバイス113〜117のうちの任意のものが、画像化ビデオセンサ102を含むネットワーク接続された構成に示された他のデバイスのうちの任意のものと通信して配置されることが出来ることを理解されたい。
【0021】
ここで図2の流れ図に参照が行われ、図2は、ビデオ信号を再構築するための本方法の一例示的実施形態の流れ図を説明する。流れ処理は、200において開始し、直ぐにステップ202に進む。
【0022】
ステップ202において、関心のある被検体のソース・ビデオ・データが受信される。ソース・ビデオ・データX(t)は、ビデオ画像を獲得することが出来るC個のチャンネルを備える画像化ビデオセンサを使用して捕捉された。各画像フィルムは、HxWというサイズのものであり、ここで、Hは、画像の高さであり、Wは、画像の幅であり、各チャンネルにおけるビデオデータは、Xc(t)∈RHxWxCによって与えられる。
【0023】
ステップ204において、ソース・ビデオ・データは、より低い次元の部分空間に投影される。投影されたビデオデータは、x(t)∈RDによって与えられ、ここで、Dは、部分空間の次元である。部分空間は、関心のある信号が、変換されたデータにおいて保護されるように注意深く選択される必要があることを当業者には理解するであろう。投影が局所的セル平均化を含む実施形態において、以下が行われる。画像データI∈RHxWに対する基底行列Ql,m∈RN、l=1,・・・,L、m=1,・・・,Mを生成する。平均化された画像データI’ l,m=<Ql,m,I>を取得するために画像データIの(l,m)番目のセルに対する平均値を決定し、ここで、<,>は、行列間の座標毎の内積を示す。図3は、例示的基底マトリックスQl,mを示す。各チャンネルのビデオデータXc(t)をX’l,m,c(t)=<Ql,m,Xc(t)>に変換する。X’l,m,c(t)の全ての値を単一のベクトルの中に集め、そして、投影ビデオデータがx(t)=vecX’l,m,c(t)∈RDであるように、D=LMCの次元的部分空間にビデオデータを投影する。投影が不可逆的離散コサイン変換(DCT)を備える実施形態において、基底行列は、離散コサイン変換に対する標準的な規定関数であるように選択される。残りのステップは、局所的セル平均化に関して考察されるようなステップである。投影が主成分分析(PCA)を備える実施形態において、ビデオデータは、投影されたビデオデータが、であるように部分空間に投影され、ここで、x’(t)=vecX(t)∈RDであり、VDは、VD∈RHWCxDであるように基底行列Vの最初のD列を表し、そしてTは、行列転置である。基底行列は、以下のように取得される。Z=E{x’x’T}∈RHWCをデータ共分散行列とする。ここで、Eは、期待値である。Zは、Z=VSVTとして基底行列で表されることが出来、ここで、Sは、データ共分散行列Zの特異値分解を得た後に取得される特異値行列である。
【0024】
ステップ206において、独立成分分析が、独立成分[y1(t),y2(t),・・・,yD(t)]を取得するために、投影されたビデオデータx(t)で行われ、ここで、y(t)=Bx(t)であり、Bは、正則分離行列である。
【0025】
ステップ208において、独立成分
【数1】

のうちの1つが、
【数2】
であるように、関心のある信号として選択され、ここで、aは、再構築されたビデオデータにおいて、対応する効果を強調するように充分に大きくなるように選択された定数である。他の全ての独立成分は、ゼロに等しく設定される。すなわち、j≠iに対して
【数3】
である。ステップ206の独立成分分析から現れる分離行列Bの波形と構造とに関する情報は、関心のある信号の識別を容易にするために使用されることが出来る。
【0026】
ステップ210において、ビデオデータは、再構築されたビデオデータ
【数4】
を取得するために、低い次元の部分空間において再構築され、ここで、
【数5】
である。ステップ204の投影が、PCA法を利用した場合には、行列VDは、
【数6】
を取得するために使用されることが出来る。
【0027】
ステップ212において、多重チャンネル信号の最初のチャンネルが、再構築のために選択される。選択は、図1に関して示され記載されたグラフィカル・ユーザ・インタフェースのうちの任意のものなどのグラフィカル・ユーザ・インタフェースを使用して達成されることが出来る。チャンネルは、事前にプログラミングされた逐次分析技術を介して繰り返し処理されることが出来る。
【0028】
ステップ214において、現在のチャンネルに対するビデオデータは、ステップ204の投影の逆行列を介して再構築される。現在のチャンネルに対するソース・ビデオ・データ
【数7】
は、
【数8】
であるように、
【数9】
から各エントリ
【数10】
を抽出することによって再構築されることが出来る。
【0029】
ステップ216において、これ以上追加のチャンネルが選択されずに残っているかに関して決定が行われる。残っている場合には、処理はステップ212に関して繰り返し、次のチャンネルが選択されるか、または処理するために識別される。処理は多重チャンネルのソース・ビデオ・データの全チャンネルが再構築されるまでそのような方法で繰り返す。
【0030】
ステップ218において、再構築されたソース・ビデオ・データが視覚ディスプレイデバイスと通信される。再構築されたソースデータはまた、図1のデバイスのうちの任意のものなどの多機能デバイスと通信されてもよい。選択された関心のある信号はここで、再構築されたビデオデータにおいて視覚的に強調される。その後、この実施形態において、さらなる処理は停止する。
【0031】
図2の流れ図は例示であることを理解されたい。流れ図に説明された動作ステップのうちの1つ以上が、異なる順序で行われてもよい。他の動作が、例えば、追加、改変、強化、簡略化、統合、または併合されてもよい。そのような変化形は、添付の特許請求の範囲の領域に該当するように意図される。流れ図の全部または一部は、機械実行可能な命令に関してハードウェアに部分的または完全に実装されてもよい。
【0032】
ここで図5を参照して、図2の流れ図に関して考察された実施形態のブロック図500を説明する。
【0033】
501において、図1のビデオセンサシステム102などの画像化ビデオセンサを使用して捕捉されたビデオ信号が受信される。この実施形態において、捕捉された元々のビデオデータ502は、C個のチャンネルによって捕捉された、高さと幅とを有する画像の二次元のアレイを備える。元々のビデオデータは、投影されたビデオデータ504を取得するために低い次元の部分空間に投影される503。投影動作Pは、データの次元を減少させる。投影動作は、可逆的な動作ではない。ブラインド音源分離などの独立成分分析505は、ソース・ビデオ・データを備える独立成分506を取得するために、投影されたビデオデータ上で行われる。関心のある信号のうちの1つが選択され507、残りの独立成分がゼロに設定される508。逆行列演算509は、投影部分空間510においてビデオデータを再構築するために、選択された関心のある成分を使用して行われる。ムーア−ペンローズの擬似逆行列P+などの疑似逆行列演算511が、ブロック512においてデータを再構築するために使用される。再構築されたビデオデータは、コンピュータワークステーション、ディスプレイデバイス、またはストレージ媒体に通信される513。
【0034】
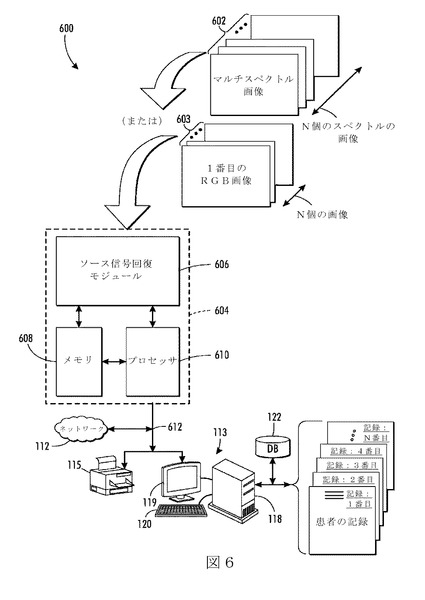
ここで図6を参照すると、図2の流れ図と図5のブロック図とに関して記載された本方法の様々な態様を実装することが出来る一例示的処理システム600のブロック図を説明する。
【0035】
図6の実施形態は、マルチスペクトルまたはハイパースペクトルのカメラを使用して捕捉された複数のスペクトル画像602、または標準的なビデオカメラを使用して捕捉された複数のビデオ画像603のいずれかを備える、関心のある被検体の捕捉されたソース・ビデオ・データを受信する。信号処理システム604は、図2および図5に関して記載されたような機能を行う信号回復モジュール606の中にソース・ビデオ・データを受信する。メモリ608とCPU610とは、ソース・ビデオ・データの処理を容易にする。再構築されたソース・ビデオ・データ612は、ワークステーション113に通信され、データベース122に格納される。
【0036】
システム604のモジュールのうちの任意のものによって行われる機能のうちの一部または全部が、ワークステーション113、または図7のシステムなどの特殊用途向けコンピュータシステムによって全体的または部分的に行われてもよい。様々なモジュールは、1つ以上のコンポーネントを指定してもよく、そのコンポーネントは同様に、意図された機能を行うように設計されたソフトウェアおよび/またはハードウェアを備えてもよいことを理解されたい。複数のモジュールは、全体的に単一の機能を行ってもよい。各モジュールは、機械読み取り可能なプログラム命令を実行することが可能である専用プロセッサを有してもよい。モジュールは、ASIC、電子回路、または特殊用途向けプロセッサなどの単一のハードウェアを備えてもよい。複数のモジュールは、単一の特殊用途向けコンピュータシステムによってか、または複数の特定目的向けコンピュータシステムを並列でかのいずれかで実行されてもよい。モジュール間の接続は物理接続と論理接続との両方を含む。モジュールはさらに、1つ以上のソフトウェアモジュール/ハードウェアモジュールを含み得、そのソフトウェアモジュール/ハードウェアモジュールはさらに、オペレーティングシステムと、ドライバと、デバイスコントローラと、他の装置とを備え、それらのうちの一部または全部がネットワークを介して接続されてもよい。本方法の1つ以上の態様が、特定用途向けコンピュータシステムに実装されてもよく、またはタスクがネットワークを通じて連結された遠隔デバイスによって行われる分散コンピューティング環境において行われてもよいことも企図される。
【0037】
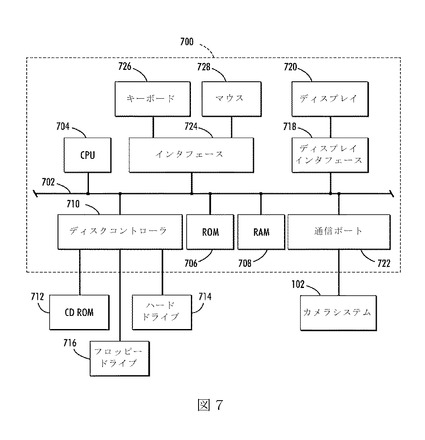
ここで図7を参照すると、図7は、図2の流れ図と図5および図6のモジュールとに関して記載されたような本方法の様々な態様を実装するための一例示的特殊用途向けコンピュータのブロック図を説明する。そのような特殊用途向けコンピュータは、機械実行可能なプログラム命令を実行することが出来、そして、マイクロプロセッサ、マイクロコントローラ、ASIC、電子回路、またはそれらの任意の組み合わせのうちのいずれかを備えてもよい。
【0038】
図7において、通信バス702は、計算、比較、論理演算、および本明細書の流れ図および説明された実施形態に関して上で記載されたステップのうちの任意のものを行うための他のプログラム命令のうちの任意のものを行うための機械読み取り可能なプログラム命令を実行することが出来る中央処理ユニット(CPU)704と通信する。プロセッサ704は、メモリ(ROM)706およびメモリ(RAM)708と通信し、それらは、全体的に例示的ストレージデバイスを構成する。そのようなメモリは、機械読み取り可能なプログラム命令と、他のプログラムデータと、本明細書に記載された機能のうちの任意のものを行うために充分な結果とを格納するために使用されてもよい。ディスクコントローラ710は、1つ以上のストレージデバイス714とインタフェース接続し、そのストレージデバイスは、外部メモリ、ジップドライブ、フラッシュメモリ、USBドライブ、またはCD−ROMドライブ712およびフロッピー(登録商標)ドライブ716などの他のデバイスを備えてもよい。ストレージデバイスは本明細書の方法を実行するための機械実行可能なプログラム命令を格納する。そのようなストレージデバイスは、様々な記録が格納されるデータベースを実装するために使用されてもよい。ディスプレイインタフェース718は、例えば、音声、グラフィック、テキストなどの様々なフォーマットでディスプレイ720上での情報の表示を行う。インタフェース724は、キーボード726およびマウス728を介して通信を行い、まとめてグラフィカル・ユーザ・インタフェースと呼ばれる。そのようなグラフィカル・ユーザ・インタフェースは、本明細書の様々な実施形態に従って、表示された情報のうちの任意のものに関する情報をユーザが入力するために有用である。外部デバイスとの通信が、例示的通信ポート722を使用して生じ得る。そのようなポートは、図1のネットワーク接続された構成に関して示され考察されたように、直接連結(有線連結)またはワイヤレス連結のいずれかによって、本明細書に示され記載された例示的ネットワークのうちの任意のもの、例えば、インターネットまたはイントラネットと通信して配置されてもよい。例示的通信ポートは、1つのドライバから別のドライバにデータを伝達することが出来る、モデム、イーサネット(登録商標)カードなどのネットワークカード、ルータ、PCMCIAのスロットおよびカード、USBポートなどを含む。ソフトウェアとデータとは、通信インタフェースによって伝送および/または受信されることが出来る、デジタル信号、アナログ信号、電磁信号、光学信号、赤外線信号、または他の信号のうちの任意のものであり得る信号の形態で通信ポートを介して伝達される。そのような信号は、例えば、ワイヤ、ケーブル、光ファイバ、電話回線、セル方式連結、RF、当該分野で現在公知であるか今後開発される他の信号伝送手段を使用して実装される。
【0039】
上で開示された特徴や機能、および他の特徴や機能、またはそれらの代替物が、多くの他の異なるシステムまたは用途に組み合わされることが望ましいことがあり得ることが理解されるだろう。本発明において現在予見できないか、または現在予期できない様々な代替、改変、変更、または改善が、明らかになり得、および/または今後当業者によって行われ得、それらもまた、以下の特許請求の範囲に包含されるように同様に意図される。従って、上で述べられた実施形態は、説明のために考察されたのであって、限定するものではない。上記の実施形態に対する様々な変更が、本発明の精神と領域とから逸脱することなく行われ得る。本明細書の教示は、関連分野の一般知識を用いて本明細書において提供される機能の記載から過度な実験を伴うことなく当業者によって、公知であるかまたは後に開発されるあらゆるシステム、構造、デバイス、および/またはソフトウェアを使用してハードウェアまたはソフトウェアに実装されることが出来る。さらに、本発明の方法は、プラグインに組み込まれたルーチン、ドライバなど、パーソナルコンピュータに組み込まれたルーチンとして、またはサーバまたはワークステーションにあるリソースとして実装されることが出来る。本明細書の教示は、オブジェクトまたはオブジェクト指向のソフトウェア開発環境を使用してソフトウェアに部分的または完全に実装されてもよく、その環境は、様々なコンピュータ、ワークステーション、サーバ、ネットワーク、または他のハードウェアプラットフォームにおいて使用されることが出来るポータブル・ソース・コードを提供する。本発明の性能のうちの1つ以上が、オペレーティングシステム、専用プログラム、もしくはWindows(登録商標)におけるコンピュータ・グラフィック・ソフトウェア、Java(登録商標)などの既製のレバレッジ・コンピュータ・グラフィック・ソフトウェアによって、またはサーバもしくはハードウェアのアクセレレータ、もしくは他の画像処理デバイスから提供されるような仮想環境においてエミュレートされることが出来る。
【0040】
本明細書に記載された方法の1つ以上の態様が、コンピュータで使用可能な媒体または機械読み取り可能な媒体を有する、1つ以上のコンピュータプログラム製品を含む製造品に組み込まれるように意図される。製造品は、本明細書に記載された方法を行うことが出来る実行可能なプログラム命令を具体化する機械アーキテクチャによって読み取ることが出来る少なくとも1つのストレージデバイスに含まれ得る。製造品は、ゼログラフィシステム、オペレーティングシステム、プラグインの一部として含まれてもよいか、またはアドオン、アップデート、アップグレード、もしくは製品一式の一部としてか、もしくは単独でかのいずれかで別個に発送、販売、賃貸、または提供されてもよい。
【0041】
上で開示された様々な特徴および機能、ならびに他の様々な特徴および機能、またはそれらの代替物は、他のシステムまたはアプリケーションに組み合わされてもよいことを理解されたい。本発明において現在予見できないか、または現在予期できない様々な代替、改変物、変更、または改善が、明らかになり得、および/または今後当業者によって行われ得、それらもまた、以下の特許請求の範囲によって包含されるように意図される。従って、上で述べられた実施形態は、例示として考えられ、限定として考えられない。上記の実施形態に対する様々な変更が、本発明の精神と領域とから逸脱することなく行われ得る。特許および特許出願を含むあらゆる印刷された刊行物の教示はそれぞれ別個に、その全体が参照により組み込まれる。
【技術分野】
【0001】
本発明は、ソースデータ内の特定の情報がビデオ再生の間に視覚的に強調されるように、ビデオカメラを使用して捕捉されたソース・ビデオ・データを再構築するためのシステムと方法とに関する。
【背景技術】
【0002】
選択された信号成分が強調されるようにビデオ信号を再構築するためのシステムと方法とが開示される。選択のための独立信号成分にソース・ビデオ・データを縮小するための方法が開示される。ソースビデオは、選択された成分がビデオ再生の間に再構築されたビデオにおいて強調されるように本明細書にさらに完全に開示されたように再構築される。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本明細書に開示される方法は、技術者が、例えば、患者の生体信号の優勢領域を視覚的に検査するために、再構築されたビデオを使用することが出来るように元々のビデオをフィルタリングするための解決策を提供する。本明細書の教示は、幅広い遠隔感知用途、特に遠隔治療分野において用途を見出す。
【図面の簡単な説明】
【0004】
【図1】図1は、関心のある被検体の多重チャンネルのソース・ビデオ・データを捕捉するための例示的画像化ビデオセンサを説明する図である。
【図2】図2は、ビデオ信号を再構築するための本方法の一例示的実施形態の流れ図である。
【図3】図3は、局所的セル平均化技術のための基底行列Ql,mを示す図である。
【図4】図4は、離散コサイン変換のための基底行列Ql,mを示す図である。
【図5】図5は、図2の流れ図に関して考察された実施形態のブロック図である。
【図6】図6は、図2の流れ図と図5のブロック図とに関して記載された、本方法の様々な態様を実装することが出来る一例示的処理システムのブロック図である。
【図7】図7は、図2の流れ図と図5および図6のモジュールとに関して記載されたような、本方法の様々な態様を実装するための一例示的特殊目的コンピュータのブロック図である。
【発明を実施するための形態】
【0005】
本明細書において使用されるように、「関心のある被検体」はヒトを指す。「ヒト」、「人」、または「患者」という用語が、この文章全体を通して使用され得るが、関心のある被検体は、動物、爬虫類、または昆虫や植物など、ヒト以外のものでもあり得る。従って、「人」または「患者」という用語の説明的使用は、添付の特許請求の範囲の領域をヒトの被検体に限定すると見られるべきではない。関心のある一例示的被検体は、図1の105で示される。
【0006】
「関心のある信号」は、例えば、まばたき、けいれんなどの体の動きを含む、心臓鼓動の信号、血流、呼吸、CO2濃度、汗、脳波信号などの意味のあるデータを含む独立成分分析を介して取得される独立成分のうちの1つである。
【0007】
「画像化ビデオセンサ」は、多重チャンネルによってソース・ビデオ・データを捕捉することが出来るデバイスである。一実施形態において、画像化ビデオセンサは、高いフレームレートと高い空間分解能とを有するデバイスを備え、例えば、黒/白ビデオ画像を捕捉するためのモノクロカメラ、またはカラービデオ画像を捕捉するためのカラーカメラなどを備える。画像化ビデオセンサは、マルチスペクトルまたはハイパースペクトルのビデオシステムなどのスペクトルセンサであってもよい。スペクトルセンサは、比較的に低いフレームレートと低い空間分解能とを有するが、高いスペクトル分解能を有するデバイスである。画像化ビデオセンサは、デュアルモード、すなわち、高いフレームレートと高い空間分解能とを有する従来のビデオモードと、低いフレームレートを有するが高いスペクトル分解能を有するスペクトルモードとで動作することが出来るハイブリッドデバイスであってもよい。標準的なビデオカメラを備える画像化ビデオセンサと、スペクトルセンサを備える画像化ビデオセンサとは、商業の様々な流れにおいて販売業者から容易に入手可能である。一例示的画像化ビデオセンサは、図1のビデオセンサ102に関して示され考察される。
【0008】
「ソース・ビデオ・データ」は、多重チャンネルによってビデオデータを獲得することが出来る画像化ビデオセンサを使用して捕捉される関心のある被検体のビデオデータを指す。
【0009】
本明細書において使用されるように、「正則一次変換」は、応用数学の分野において充分に理解されるように、局所的セル平均化、離散コサイン変換、または主成分分析を指す。セル平均化は、データがデータストリーム内においてセルを導くことと遅れさせることとから抽出される充分に理解された技術である。離散コサイン変換(DCT)は異なる周波数で発振するコサイン関数の合計によって一連のデータポイントを表すための充分に確立された技術である。主成分分析(PCA)は、主成分と呼ばれる一組の無相関変数の値に、相関する可能性のある一組の変数の記録を変換するために直交変換を使用する。
【0010】
「独立成分分析」(ICA)は、観察されたデータの「独立成分」と呼ばれる基本ソースの線形混合で構成される一組の記録から独立ソース信号成分を明らかにするための分解方法である。ICAは、(不相関係数とは対象的に)データ内の統計学的に独立した係数を探すことによってソース信号における独立成分(IC)を明らかにする。結果としての成分の順序は任意である。概して、ICAは、追加の定数をさらに用いることなく減少されることが出来ない固有の不確定性を有する。
【0011】
「ムーア−ペンローズの擬似逆行列」は、行列Aの一般逆行列を指し、その一般逆行列は、Aの逆行列に関する一部の特性を有するが、必ずしも特性の全てを有するわけではない。一般逆行列は、可逆的な行列よりも幅広い種類の行列に対する逆行列として働くことが出来る行列を取得するように構築される。典型的には、一般逆行列は任意の行列に対して存在し、行列が逆行列を有する時には、その逆行列と一般逆行列とは同じである。「擬似逆行列」という用語は、通常、ムーア−ペンローズの擬似逆行列を指すことを当業者は理解するであろう。
【0012】
「遠隔感知環境」は、非接触非侵襲性感知を指し、すなわち、感知デバイスが、感知されている被検体に物理的に接触しない。感知デバイスは、例えば、1インチ未満の近さから、(遠隔治療の場合には)数マイルまで被検体から離れた任意の距離にあることが出来る。その環境は、例えば、病院、救急車、医務室など任意の状況であり得る。
【0013】
ここで図1に参照が行われる。図1は、関心のある被検体の多重チャンネルのソース・ビデオ・データを捕捉するための例示的な画像化ビデオセンサを説明する。
【0014】
図1は、ベッド104の横で技術者103によって動作される画像化ビデオセンサ102を有する検査室100を示し、その検査室に、関心のある被検体105がシート107によって覆われながら彼/彼女の頭を枕106に載せて示される。画像化ビデオセンサ102は、視野109が看護師によって患者に向けられることが出来るように支持アーム108に回転可能に固定される。支持アームは、画像化ビデオセンサが、ベッドからベッドへ、そして部屋から部屋へ動かされることが出来るように一組の車輪上にある。患者105はベッド上で仰向け位置で示されるが、被検体が、例えば、車椅子などの他の補助デバイスに配置される間、または歩くことを含む起立して配置される間に、関心のある被検体の画像が捕捉されることが出来ることを理解されたい。図1の実施形態は、あらゆる点で、添付の特許請求の領域を限定すると見なされるように意図されていない。
【0015】
画像化ビデオセンサ102は、多重チャンネルのデータを捕捉し、単一の画像化ビデオセンサ、または複数の個々のもしくは別個の画像化ビデオ・センサ・ユニットを含む画像化ビデオセンサのアレイであってもよい。中央プロセッサユニット(CPU)は、画像化ビデオセンサに不可欠であり、メモリと通信する。アンテナ110は、捕捉されたソース・ビデオ・データを通信デバイス111に通信するために使用され、通信デバイスは、ビデオ信号を受信し、複数のデバイスにビデオデータを通信する。トランスミッタ110は、ケーブルを利用した有線接続、およびタワー111および/またはネットワーク112と通信するハブであってもよい。画像化ビデオセンサ102は、有線および/またはワイヤレスの素子を組み込んでもよく、ケーブル、無線周波、または当該分野において公知の通信のためのその他任意の方法などの他の手段を介して接続されてもよい。ネットワーク112は、タワー111から伝送された信号を受信し、ワークステーション113、グラフィカル・ディスプレイ・デバイス114、および/または多機能印刷システムデバイス115に信号をワイヤレス通信することが出来る。信号伝送システム111はまた、ハンドヘルドのセル方式デバイス116およびiPad117と通信する。ワークステーション113およびデバイス114は、デバイス116および117と画像化ビデオセンサ102を含むネットワーク112によって、互いに、そして多機能デバイス115と通信する。ネットワーク接続されたそのような感知環境は、全体的に、単一の建物もしくはキャンパスの領域内に組み込まれてもよく、または幅広く離散されたネットワーク全体に及ぶ異なる位置に分散されてもよい。
【0016】
ネットワーク112の態様は、一般的に公知であり、ワールド・ワイド・ウェブを含んでもよい。特定のネットワーク構成の構築および/または動作に関するさらなる考察は省略される。敢えて言えば、データは、例えば、電子信号、電磁信号、光学信号、光信号、または他の信号であり得る信号の形態で伝達される。これらの信号は、サーバなどの通信デバイスに提供され、その通信デバイスは、ワイヤ、ケーブル、光ファイバ、電話回線、セル方式接続、RF、衛星、または他の媒体もしくは通信経路によってデータパケットを送受信する。
【0017】
マザーボードと、CPUと、メモリと、インタフェースと、ストレージデバイスと、ネットワークカードとを収容するコンピュータケース118を備えるコンピュータ113が示される。コンピュータシステムはまた、CRTまたはLDCなどのディスプレイ119を含む。英数字キーボード120とマウス(図示せず)は、コンピュータがユーザ入力を受け入れるためのメカニズムを提供する。コンピュータ読取可能な媒体121は、本方法の様々な態様を実装するための機械実行可能な命令を有する。コンピュータシステム113はデータベース122を実装し、データベースにおいて、様々な記録が、格納され、操作され、そして、クエリに応答して引き出される。データベースは外部のデバイスとして示されるが、データベースは、コンピュータケース118に対して内部にあってもよく、コンピュータケースの中のハードディスクに設置されてもよい。記録は、情報を含むことが出来る任意のデータ構造を指し、その情報は、索引をつけられ、格納され、検索され、そして、クエリに応答して引き出されることが出来る。そのような構築物は、ソフトウェアおよびデータベースの分野において充分に確立されている。
【0018】
コンピュータプラットフォームは、インストールされたアプリケーションをホストするためにサーバ・ソフトウェア・プログラムを実行する(またはサーバハードウェアを収容する)ことが出来る。そのようなアプリケーションは、商業の様々な流れにおいて販売業者から容易に入手可能である。コンピュータプラットフォーム113はさらに、リクエストされたアプリケーションをホストするプラットフォームにクライアントデバイスから、アプリケーションに対するリクエストを導き、リクエストしているクライアントデバイスにホストデバイスから応答をリダイレクトするためのサービスプロキシを作成し走らせることが出来きてもよい。コンピュータプラットフォームは、ビデオシステム102内にあるコントローラモジュールに乗って存在するプロセッサに対するサーバとして働いてもよい。コンピュータプラットフォームは、代替的に、ラップトップ、サーバ、メインフレームなどのうちの任意のものであってもよい。図1の技術者103などのユーザによる視覚的再検討のための捕捉された様々な画像の提示のためのディスプレイデバイス123を備えるコンピュータ114が示される。コンピュータ114は、様々な画像の操作を可能にすると共に、本明細書の教示に従った関心のある1つ以上の信号の選択のためにキーボード124とマウス125とを含む。
【0019】
画像の視覚的表示のためと、ユーザが複数のデバイス固有の環境のうちのいずれかに対してデバイスを構成することを可能にするためとのユーザインタフェース126を有する印刷システムを備える印刷システムデバイス115が示される。プリンタ115は、元々のビデオ画像のうちの1つ以上、および/またはハードコピー印刷のために再構築されたビデオ画像のうちの1つ以上を減少させるために使用されてもよい。スキャナ127は、文書、および印刷されたビデオ画像が電磁形式にスキャニングされ、別のデバイスに伝送されることを可能にする。紙のトレイ128は、出力された印刷物を受け取る。ユーザインタフェース(UI)126を含む多機能デバイス115が示され、そのユーザインタフェースは、アイコンと、他の選択可能なメニュー選択肢と、本方法の動作に応答して表示される情報とのユーザインタフェース上での表示のためのものである。グラフィカルUIは、タッチセンサー表面を介してユーザ入力を受信するためのタッチ・スクリーン・ディスプレイを含み、そして、キーボード、キーパッド、マウス、タッチパッドなどのうちの任意のものをさらに含んでもよい。
【0020】
ビデオシステム102を含む図1のデバイスの全てが、全体としてネットワークを形成する。図1のデバイス113〜117のうちの任意のものが、画像化ビデオセンサ102を含むネットワーク接続された構成に示された他のデバイスのうちの任意のものと通信して配置されることが出来ることを理解されたい。
【0021】
ここで図2の流れ図に参照が行われ、図2は、ビデオ信号を再構築するための本方法の一例示的実施形態の流れ図を説明する。流れ処理は、200において開始し、直ぐにステップ202に進む。
【0022】
ステップ202において、関心のある被検体のソース・ビデオ・データが受信される。ソース・ビデオ・データX(t)は、ビデオ画像を獲得することが出来るC個のチャンネルを備える画像化ビデオセンサを使用して捕捉された。各画像フィルムは、HxWというサイズのものであり、ここで、Hは、画像の高さであり、Wは、画像の幅であり、各チャンネルにおけるビデオデータは、Xc(t)∈RHxWxCによって与えられる。
【0023】
ステップ204において、ソース・ビデオ・データは、より低い次元の部分空間に投影される。投影されたビデオデータは、x(t)∈RDによって与えられ、ここで、Dは、部分空間の次元である。部分空間は、関心のある信号が、変換されたデータにおいて保護されるように注意深く選択される必要があることを当業者には理解するであろう。投影が局所的セル平均化を含む実施形態において、以下が行われる。画像データI∈RHxWに対する基底行列Ql,m∈RN、l=1,・・・,L、m=1,・・・,Mを生成する。平均化された画像データI’ l,m=<Ql,m,I>を取得するために画像データIの(l,m)番目のセルに対する平均値を決定し、ここで、<,>は、行列間の座標毎の内積を示す。図3は、例示的基底マトリックスQl,mを示す。各チャンネルのビデオデータXc(t)をX’l,m,c(t)=<Ql,m,Xc(t)>に変換する。X’l,m,c(t)の全ての値を単一のベクトルの中に集め、そして、投影ビデオデータがx(t)=vecX’l,m,c(t)∈RDであるように、D=LMCの次元的部分空間にビデオデータを投影する。投影が不可逆的離散コサイン変換(DCT)を備える実施形態において、基底行列は、離散コサイン変換に対する標準的な規定関数であるように選択される。残りのステップは、局所的セル平均化に関して考察されるようなステップである。投影が主成分分析(PCA)を備える実施形態において、ビデオデータは、投影されたビデオデータが、であるように部分空間に投影され、ここで、x’(t)=vecX(t)∈RDであり、VDは、VD∈RHWCxDであるように基底行列Vの最初のD列を表し、そしてTは、行列転置である。基底行列は、以下のように取得される。Z=E{x’x’T}∈RHWCをデータ共分散行列とする。ここで、Eは、期待値である。Zは、Z=VSVTとして基底行列で表されることが出来、ここで、Sは、データ共分散行列Zの特異値分解を得た後に取得される特異値行列である。
【0024】
ステップ206において、独立成分分析が、独立成分[y1(t),y2(t),・・・,yD(t)]を取得するために、投影されたビデオデータx(t)で行われ、ここで、y(t)=Bx(t)であり、Bは、正則分離行列である。
【0025】
ステップ208において、独立成分
【数1】
のうちの1つが、
【数2】
であるように、関心のある信号として選択され、ここで、aは、再構築されたビデオデータにおいて、対応する効果を強調するように充分に大きくなるように選択された定数である。他の全ての独立成分は、ゼロに等しく設定される。すなわち、j≠iに対して
【数3】
である。ステップ206の独立成分分析から現れる分離行列Bの波形と構造とに関する情報は、関心のある信号の識別を容易にするために使用されることが出来る。
【0026】
ステップ210において、ビデオデータは、再構築されたビデオデータ
【数4】
を取得するために、低い次元の部分空間において再構築され、ここで、
【数5】
である。ステップ204の投影が、PCA法を利用した場合には、行列VDは、
【数6】
を取得するために使用されることが出来る。
【0027】
ステップ212において、多重チャンネル信号の最初のチャンネルが、再構築のために選択される。選択は、図1に関して示され記載されたグラフィカル・ユーザ・インタフェースのうちの任意のものなどのグラフィカル・ユーザ・インタフェースを使用して達成されることが出来る。チャンネルは、事前にプログラミングされた逐次分析技術を介して繰り返し処理されることが出来る。
【0028】
ステップ214において、現在のチャンネルに対するビデオデータは、ステップ204の投影の逆行列を介して再構築される。現在のチャンネルに対するソース・ビデオ・データ
【数7】
は、
【数8】
であるように、
【数9】
から各エントリ
【数10】
を抽出することによって再構築されることが出来る。
【0029】
ステップ216において、これ以上追加のチャンネルが選択されずに残っているかに関して決定が行われる。残っている場合には、処理はステップ212に関して繰り返し、次のチャンネルが選択されるか、または処理するために識別される。処理は多重チャンネルのソース・ビデオ・データの全チャンネルが再構築されるまでそのような方法で繰り返す。
【0030】
ステップ218において、再構築されたソース・ビデオ・データが視覚ディスプレイデバイスと通信される。再構築されたソースデータはまた、図1のデバイスのうちの任意のものなどの多機能デバイスと通信されてもよい。選択された関心のある信号はここで、再構築されたビデオデータにおいて視覚的に強調される。その後、この実施形態において、さらなる処理は停止する。
【0031】
図2の流れ図は例示であることを理解されたい。流れ図に説明された動作ステップのうちの1つ以上が、異なる順序で行われてもよい。他の動作が、例えば、追加、改変、強化、簡略化、統合、または併合されてもよい。そのような変化形は、添付の特許請求の範囲の領域に該当するように意図される。流れ図の全部または一部は、機械実行可能な命令に関してハードウェアに部分的または完全に実装されてもよい。
【0032】
ここで図5を参照して、図2の流れ図に関して考察された実施形態のブロック図500を説明する。
【0033】
501において、図1のビデオセンサシステム102などの画像化ビデオセンサを使用して捕捉されたビデオ信号が受信される。この実施形態において、捕捉された元々のビデオデータ502は、C個のチャンネルによって捕捉された、高さと幅とを有する画像の二次元のアレイを備える。元々のビデオデータは、投影されたビデオデータ504を取得するために低い次元の部分空間に投影される503。投影動作Pは、データの次元を減少させる。投影動作は、可逆的な動作ではない。ブラインド音源分離などの独立成分分析505は、ソース・ビデオ・データを備える独立成分506を取得するために、投影されたビデオデータ上で行われる。関心のある信号のうちの1つが選択され507、残りの独立成分がゼロに設定される508。逆行列演算509は、投影部分空間510においてビデオデータを再構築するために、選択された関心のある成分を使用して行われる。ムーア−ペンローズの擬似逆行列P+などの疑似逆行列演算511が、ブロック512においてデータを再構築するために使用される。再構築されたビデオデータは、コンピュータワークステーション、ディスプレイデバイス、またはストレージ媒体に通信される513。
【0034】
ここで図6を参照すると、図2の流れ図と図5のブロック図とに関して記載された本方法の様々な態様を実装することが出来る一例示的処理システム600のブロック図を説明する。
【0035】
図6の実施形態は、マルチスペクトルまたはハイパースペクトルのカメラを使用して捕捉された複数のスペクトル画像602、または標準的なビデオカメラを使用して捕捉された複数のビデオ画像603のいずれかを備える、関心のある被検体の捕捉されたソース・ビデオ・データを受信する。信号処理システム604は、図2および図5に関して記載されたような機能を行う信号回復モジュール606の中にソース・ビデオ・データを受信する。メモリ608とCPU610とは、ソース・ビデオ・データの処理を容易にする。再構築されたソース・ビデオ・データ612は、ワークステーション113に通信され、データベース122に格納される。
【0036】
システム604のモジュールのうちの任意のものによって行われる機能のうちの一部または全部が、ワークステーション113、または図7のシステムなどの特殊用途向けコンピュータシステムによって全体的または部分的に行われてもよい。様々なモジュールは、1つ以上のコンポーネントを指定してもよく、そのコンポーネントは同様に、意図された機能を行うように設計されたソフトウェアおよび/またはハードウェアを備えてもよいことを理解されたい。複数のモジュールは、全体的に単一の機能を行ってもよい。各モジュールは、機械読み取り可能なプログラム命令を実行することが可能である専用プロセッサを有してもよい。モジュールは、ASIC、電子回路、または特殊用途向けプロセッサなどの単一のハードウェアを備えてもよい。複数のモジュールは、単一の特殊用途向けコンピュータシステムによってか、または複数の特定目的向けコンピュータシステムを並列でかのいずれかで実行されてもよい。モジュール間の接続は物理接続と論理接続との両方を含む。モジュールはさらに、1つ以上のソフトウェアモジュール/ハードウェアモジュールを含み得、そのソフトウェアモジュール/ハードウェアモジュールはさらに、オペレーティングシステムと、ドライバと、デバイスコントローラと、他の装置とを備え、それらのうちの一部または全部がネットワークを介して接続されてもよい。本方法の1つ以上の態様が、特定用途向けコンピュータシステムに実装されてもよく、またはタスクがネットワークを通じて連結された遠隔デバイスによって行われる分散コンピューティング環境において行われてもよいことも企図される。
【0037】
ここで図7を参照すると、図7は、図2の流れ図と図5および図6のモジュールとに関して記載されたような本方法の様々な態様を実装するための一例示的特殊用途向けコンピュータのブロック図を説明する。そのような特殊用途向けコンピュータは、機械実行可能なプログラム命令を実行することが出来、そして、マイクロプロセッサ、マイクロコントローラ、ASIC、電子回路、またはそれらの任意の組み合わせのうちのいずれかを備えてもよい。
【0038】
図7において、通信バス702は、計算、比較、論理演算、および本明細書の流れ図および説明された実施形態に関して上で記載されたステップのうちの任意のものを行うための他のプログラム命令のうちの任意のものを行うための機械読み取り可能なプログラム命令を実行することが出来る中央処理ユニット(CPU)704と通信する。プロセッサ704は、メモリ(ROM)706およびメモリ(RAM)708と通信し、それらは、全体的に例示的ストレージデバイスを構成する。そのようなメモリは、機械読み取り可能なプログラム命令と、他のプログラムデータと、本明細書に記載された機能のうちの任意のものを行うために充分な結果とを格納するために使用されてもよい。ディスクコントローラ710は、1つ以上のストレージデバイス714とインタフェース接続し、そのストレージデバイスは、外部メモリ、ジップドライブ、フラッシュメモリ、USBドライブ、またはCD−ROMドライブ712およびフロッピー(登録商標)ドライブ716などの他のデバイスを備えてもよい。ストレージデバイスは本明細書の方法を実行するための機械実行可能なプログラム命令を格納する。そのようなストレージデバイスは、様々な記録が格納されるデータベースを実装するために使用されてもよい。ディスプレイインタフェース718は、例えば、音声、グラフィック、テキストなどの様々なフォーマットでディスプレイ720上での情報の表示を行う。インタフェース724は、キーボード726およびマウス728を介して通信を行い、まとめてグラフィカル・ユーザ・インタフェースと呼ばれる。そのようなグラフィカル・ユーザ・インタフェースは、本明細書の様々な実施形態に従って、表示された情報のうちの任意のものに関する情報をユーザが入力するために有用である。外部デバイスとの通信が、例示的通信ポート722を使用して生じ得る。そのようなポートは、図1のネットワーク接続された構成に関して示され考察されたように、直接連結(有線連結)またはワイヤレス連結のいずれかによって、本明細書に示され記載された例示的ネットワークのうちの任意のもの、例えば、インターネットまたはイントラネットと通信して配置されてもよい。例示的通信ポートは、1つのドライバから別のドライバにデータを伝達することが出来る、モデム、イーサネット(登録商標)カードなどのネットワークカード、ルータ、PCMCIAのスロットおよびカード、USBポートなどを含む。ソフトウェアとデータとは、通信インタフェースによって伝送および/または受信されることが出来る、デジタル信号、アナログ信号、電磁信号、光学信号、赤外線信号、または他の信号のうちの任意のものであり得る信号の形態で通信ポートを介して伝達される。そのような信号は、例えば、ワイヤ、ケーブル、光ファイバ、電話回線、セル方式連結、RF、当該分野で現在公知であるか今後開発される他の信号伝送手段を使用して実装される。
【0039】
上で開示された特徴や機能、および他の特徴や機能、またはそれらの代替物が、多くの他の異なるシステムまたは用途に組み合わされることが望ましいことがあり得ることが理解されるだろう。本発明において現在予見できないか、または現在予期できない様々な代替、改変、変更、または改善が、明らかになり得、および/または今後当業者によって行われ得、それらもまた、以下の特許請求の範囲に包含されるように同様に意図される。従って、上で述べられた実施形態は、説明のために考察されたのであって、限定するものではない。上記の実施形態に対する様々な変更が、本発明の精神と領域とから逸脱することなく行われ得る。本明細書の教示は、関連分野の一般知識を用いて本明細書において提供される機能の記載から過度な実験を伴うことなく当業者によって、公知であるかまたは後に開発されるあらゆるシステム、構造、デバイス、および/またはソフトウェアを使用してハードウェアまたはソフトウェアに実装されることが出来る。さらに、本発明の方法は、プラグインに組み込まれたルーチン、ドライバなど、パーソナルコンピュータに組み込まれたルーチンとして、またはサーバまたはワークステーションにあるリソースとして実装されることが出来る。本明細書の教示は、オブジェクトまたはオブジェクト指向のソフトウェア開発環境を使用してソフトウェアに部分的または完全に実装されてもよく、その環境は、様々なコンピュータ、ワークステーション、サーバ、ネットワーク、または他のハードウェアプラットフォームにおいて使用されることが出来るポータブル・ソース・コードを提供する。本発明の性能のうちの1つ以上が、オペレーティングシステム、専用プログラム、もしくはWindows(登録商標)におけるコンピュータ・グラフィック・ソフトウェア、Java(登録商標)などの既製のレバレッジ・コンピュータ・グラフィック・ソフトウェアによって、またはサーバもしくはハードウェアのアクセレレータ、もしくは他の画像処理デバイスから提供されるような仮想環境においてエミュレートされることが出来る。
【0040】
本明細書に記載された方法の1つ以上の態様が、コンピュータで使用可能な媒体または機械読み取り可能な媒体を有する、1つ以上のコンピュータプログラム製品を含む製造品に組み込まれるように意図される。製造品は、本明細書に記載された方法を行うことが出来る実行可能なプログラム命令を具体化する機械アーキテクチャによって読み取ることが出来る少なくとも1つのストレージデバイスに含まれ得る。製造品は、ゼログラフィシステム、オペレーティングシステム、プラグインの一部として含まれてもよいか、またはアドオン、アップデート、アップグレード、もしくは製品一式の一部としてか、もしくは単独でかのいずれかで別個に発送、販売、賃貸、または提供されてもよい。
【0041】
上で開示された様々な特徴および機能、ならびに他の様々な特徴および機能、またはそれらの代替物は、他のシステムまたはアプリケーションに組み合わされてもよいことを理解されたい。本発明において現在予見できないか、または現在予期できない様々な代替、改変物、変更、または改善が、明らかになり得、および/または今後当業者によって行われ得、それらもまた、以下の特許請求の範囲によって包含されるように意図される。従って、上で述べられた実施形態は、例示として考えられ、限定として考えられない。上記の実施形態に対する様々な変更が、本発明の精神と領域とから逸脱することなく行われ得る。特許および特許出願を含むあらゆる印刷された刊行物の教示はそれぞれ別個に、その全体が参照により組み込まれる。
【特許請求の範囲】
【請求項1】
遠隔感知環境において捕捉されたビデオ信号を再構築するための方法であって、前記方法は、
関心のある被検体のソース・ビデオ・データを受信することであって、前記ソースビデオは、多重チャンネルによって信号を獲得することが出来る画像化ビデオセンサを使用して捕捉される、受信することと、
低い次元の部分空間に前記ソース・ビデオ・データを投影することと、
独立成分を識別するために、前記投影されたビデオデータ上で独立成分分析を行うことと、
関心のある信号として前記独立成分のうちの1つを選択することと、
前記部分空間において、再構築されたビデオデータを生成するために前記選択された信号を使用することと、
前記再構築されたビデオデータを使用してソース・ビデオ・データを各チャンネルに対して再構築することと、
前記再構築されたソース・ビデオ・データをディスプレイデバイスに通信することと、
を包含する、方法。
【請求項2】
前記投影は、局所的セル平均化、離散コサイン変換、および主成分分析のうちのいずれかを使用して行われる、請求項1に記載の方法。
【請求項3】
前記ソース・ビデオ・データを再構築することは、逆行列演算を備える、請求項1に記載の方法。
【請求項4】
前記画像化ビデオセンサは、RGBビデオカメラ、マルチスペクトルカメラ、およびハイパースペクトルカメラのうちのいずれかを備える、請求項1に記載の方法。
【請求項5】
心臓信号、呼吸測度および呼吸機能、呼気中のCO2濃度、汗、脳波パターンおよび脳波信号、感染度、血流および血液循環、ならびに体の動きのうちのいずれかの決定を容易にするために前記再構築されたソース・ビデオ・データを使用することをさらに包含する、請求項1に記載の方法。
【請求項6】
遠隔感知環境において捕捉されたビデオ信号を再構築するためのシステムであって、前記システムは、
多重チャンネルによってソース信号を獲得するための画像化ビデオセンサと、
前記ビデオ感知システムおよびメモリと通信するプロセッサであって、前記プロセッサは、
前記画像化センサを使用して捕捉された関心のある被検体のソース・ビデオ・データを受信することと、
低い次元の部分空間に前記ソース・ビデオ・データを投影することと、
独立成分を識別するために前記投影されたビデオデータ上で独立成分分析を行うことと、
関心のある信号として前記独立成分のうちの1つを選択することと、
前記部分空間において、再構築されたビデオデータを生成するために前記選択された信号を使用することと、
前記再構築されたビデオデータを使用してソース・ビデオ・データを各チャンネルに対して再構築することと、
前記再構築されたソース・ビデオ・データをディスプレイデバイスに通信することと
を行うための機械読み取り可能な命令を実行する、プロセッサと
を備える、システム。
【請求項7】
前記投影することは、局所的セル平均化、離散コサイン変換、および主成分分析のうちのいずれかを使用して行われる、請求項6に記載のシステム。
【請求項8】
前記ソース・ビデオ・データを再構築することは、逆行列演算を備える、請求項6に記載のシステム。
【請求項9】
前記画像化ビデオセンサは、RGBビデオカメラ、マルチスペクトルカメラ、およびハイパースペクトルカメラのうちのいずれかを備える、請求項6に記載のシステム。
【請求項10】
心臓信号、呼吸測度および呼吸機能、呼気中のCO2濃度、汗、脳波パターンおよび脳波信号、感染度、血流および血液循環、ならびに体の動きのうちのいずれかの決定を容易にするために前記再構築されたソース・ビデオ・データを使用することをさらに包含する、請求項6に記載のシステム。
【請求項1】
遠隔感知環境において捕捉されたビデオ信号を再構築するための方法であって、前記方法は、
関心のある被検体のソース・ビデオ・データを受信することであって、前記ソースビデオは、多重チャンネルによって信号を獲得することが出来る画像化ビデオセンサを使用して捕捉される、受信することと、
低い次元の部分空間に前記ソース・ビデオ・データを投影することと、
独立成分を識別するために、前記投影されたビデオデータ上で独立成分分析を行うことと、
関心のある信号として前記独立成分のうちの1つを選択することと、
前記部分空間において、再構築されたビデオデータを生成するために前記選択された信号を使用することと、
前記再構築されたビデオデータを使用してソース・ビデオ・データを各チャンネルに対して再構築することと、
前記再構築されたソース・ビデオ・データをディスプレイデバイスに通信することと、
を包含する、方法。
【請求項2】
前記投影は、局所的セル平均化、離散コサイン変換、および主成分分析のうちのいずれかを使用して行われる、請求項1に記載の方法。
【請求項3】
前記ソース・ビデオ・データを再構築することは、逆行列演算を備える、請求項1に記載の方法。
【請求項4】
前記画像化ビデオセンサは、RGBビデオカメラ、マルチスペクトルカメラ、およびハイパースペクトルカメラのうちのいずれかを備える、請求項1に記載の方法。
【請求項5】
心臓信号、呼吸測度および呼吸機能、呼気中のCO2濃度、汗、脳波パターンおよび脳波信号、感染度、血流および血液循環、ならびに体の動きのうちのいずれかの決定を容易にするために前記再構築されたソース・ビデオ・データを使用することをさらに包含する、請求項1に記載の方法。
【請求項6】
遠隔感知環境において捕捉されたビデオ信号を再構築するためのシステムであって、前記システムは、
多重チャンネルによってソース信号を獲得するための画像化ビデオセンサと、
前記ビデオ感知システムおよびメモリと通信するプロセッサであって、前記プロセッサは、
前記画像化センサを使用して捕捉された関心のある被検体のソース・ビデオ・データを受信することと、
低い次元の部分空間に前記ソース・ビデオ・データを投影することと、
独立成分を識別するために前記投影されたビデオデータ上で独立成分分析を行うことと、
関心のある信号として前記独立成分のうちの1つを選択することと、
前記部分空間において、再構築されたビデオデータを生成するために前記選択された信号を使用することと、
前記再構築されたビデオデータを使用してソース・ビデオ・データを各チャンネルに対して再構築することと、
前記再構築されたソース・ビデオ・データをディスプレイデバイスに通信することと
を行うための機械読み取り可能な命令を実行する、プロセッサと
を備える、システム。
【請求項7】
前記投影することは、局所的セル平均化、離散コサイン変換、および主成分分析のうちのいずれかを使用して行われる、請求項6に記載のシステム。
【請求項8】
前記ソース・ビデオ・データを再構築することは、逆行列演算を備える、請求項6に記載のシステム。
【請求項9】
前記画像化ビデオセンサは、RGBビデオカメラ、マルチスペクトルカメラ、およびハイパースペクトルカメラのうちのいずれかを備える、請求項6に記載のシステム。
【請求項10】
心臓信号、呼吸測度および呼吸機能、呼気中のCO2濃度、汗、脳波パターンおよび脳波信号、感染度、血流および血液循環、ならびに体の動きのうちのいずれかの決定を容易にするために前記再構築されたソース・ビデオ・データを使用することをさらに包含する、請求項6に記載のシステム。
【図1】

【図2】
【図5】
【図6】
【図7】
【図3】
【図4】
【図2】
【図5】
【図6】
【図7】
【図3】
【図4】
【公開番号】特開2013−90922(P2013−90922A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−225215(P2012−225215)
【出願日】平成24年10月10日(2012.10.10)
【出願人】(596170170)ゼロックス コーポレイション (1,961)
【氏名又は名称原語表記】XEROX CORPORATION
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成24年10月10日(2012.10.10)
【出願人】(596170170)ゼロックス コーポレイション (1,961)
【氏名又は名称原語表記】XEROX CORPORATION
【Fターム(参考)】
[ Back to top ]