
独立計量弁を較正するための方法
流れ遮断位置と流れ通過位置との間で可動な弁体(26a、28a、30a、32a)を有する弁(26、28、30、32)を較正するための方法は、弁に向けられた流体を加圧するステップと、弁体の位置を制御するための弁に向けられた電流を増加させるステップと、流体圧力を検出するステップとを含む。さらに、弁を較正するための方法は、検出された流体圧力の時間導関数が所定の時間間隔にわたって所定のしきい値よりも大きいかどうかを決定するステップと、弁に向けられるクラッキングポイント電流コマンドを決定するステップとを含む。検出された流体圧力の時間導関数が所定のしきい値よりも大きい場合、クラッキングポイント電流コマンドが弁に向けられる。

【発明の詳細な説明】
【技術分野】
【0001】
本開示は、一般に、弁を較正するための方法、より詳しくは、独立計量弁を較正するための方法に関する。
【背景技術】
【0002】
例えば、ブルドーザ、ローダ、掘削機、モータグレーダ等の機械、および他のタイプの重機械には、種々の仕事を実現するために1つ以上の油圧アクチュエータが使用される。これらのアクチュエータは、それらの中のチャンバに加圧流体を供給する機械のポンプに流体接続される。アクチュエータのチャンバへのおよびそこからの加圧流体の流量および方向を制御するために、弁構造は、典型的に、ポンプとアクチュエータの少なくとも1つとの間に流体接続される。
【0003】
弁構造は、加圧された作動油がポンプからアクチュエータ室に流れることを許容するように独立して作動される独立計量弁(IMV)を含み得る。それぞれのIMVの弁スプールの変位を変化させることによって、それぞれのアクチュエータ室への作動油の流れの量を制御できる。それぞれの弁スプールは、ポンプからアクチュエータへの流れとアクチュエータからタンクへの流れとを含む弁構造の作動油の流れを制御する一連の計量スロットを有する。アクチュエータが油圧シリンダであった場合、これらの流れは、一般に、ポンプからシリンダへの流れおよびシリンダからタンクへの流れとそれぞれ呼ばれる。
【0004】
IMVの製造および組立は、それぞれのIMVが他のものとは異なって機能し得るように弁構成部材の性能に影響を及ぼすかもしれない。結果として、弁構成部材が予測可能に動作しない可能性があり、油圧アクチュエータの性能が低下する場合がある。
【0005】
ポンプとアクチュエータとの間に流体接続された弁構造を介して流れを制御する1つの方法が、スティーブンソン(Stephenson)に交付された(特許文献1)に記載されている。(特許文献1)は、アクチュエータ室に接続された入口弁または出口弁を較正する方法を記載している。入口弁は、アクチュエータ室に供給される流れの量を制御し、また出口弁は、アクチュエータ室から出る流れの量を制御する。入口弁を較正するために、入口を作動させるための電流が増加する間に出口弁が閉鎖され、これにより、アクチュエータ室内の圧力が上昇する。アクチュエータ室内の圧力の上昇率が所定のしきい値を超えたときに、入口弁用の弁開放電流レベルが決定される。出口弁を較正するために、入口弁が開放され、この結果、アクチュエータ室内の圧力が上昇する。次に、入口弁が閉鎖され、出口弁を作動させるための電流が増加される。アクチュエータ室内の圧力の低下率の大きさが所定のしきい値を超えたときに、出口弁用の弁開放電流レベルが決定される。その較正により、入口弁または出口弁用の弁開放電流レベルと個々の弁用の初期電流レベルとの間の差が、少なくとも1つの所望のマージンだけ異なることが保証される。
【0006】
(特許文献1)の較正方法により、最初に弁に印加される予め規定される初期電流レベルが決定される。この初期電流レベルは、弁が開放し始める電流レベルよりも低い所望の大きさである。測定された弁開放電流レベルと初期電流レベルとの間に差が存在する場合にのみ、入口弁または出口弁に供給される初期電流レベルが調整される。さらに、(特許文献1)は、個々のシリンダポートで圧力センサを必要とし、それぞれのシリンダポートでセンサを必要とする。このことにより、センサの数が増加し、これによって較正工程の複雑さが増す。その上、(特許文献1)では、圧力変化率が所定のしきい値に達したときに弁開放電流レベルが測定されるが、圧力変化率が所定の時間間隔にわたって所定のしきい値を上回っているかどうかが決定されない。したがって、(特許文献1)の較正方法は、信号ノイズ、あるいは入口弁または出口弁を通る漏れにより圧力変化率の測定に誤差が生じた場合、弁開放電流レベルを早めに決定してしまうことがある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第6,397,655号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
開示されるシステムは、上述の課題の1つ以上を克服することに向けられる。
【課題を解決するための手段】
【0009】
一形態では、本開示は、流れ遮断位置と流れ通過位置との間で可動な弁体を有する弁を較正するための方法に関する。本方法は、弁に向けられた流体を加圧するステップと、弁体の位置を制御するための弁に向けられた電流を増加させるステップと、流体圧力を検出するステップとを含む。さらに、弁を較正するための本方法は、検出された流体圧力の時間導関数が所定の時間間隔にわたって所定のしきい値よりも大きいかどうかを決定するステップと、弁に向けられるクラッキングポイント電流コマンドを決定するステップとを含む。検出された流体圧力の時間導関数が所定のしきい値よりも大きい場合、クラッキングポイント電流コマンドが弁に向けられる。
【0010】
他の形態では、本開示は、流れ遮断位置と流れ通過位置との間で可動な弁体を有する弁を較正するためのシステムに関する。システムは、流体を加圧するように構成された源と、その出口で流体圧力を検出するように構成された圧力センサと、それに接続された制御装置とを含む。制御装置は、弁体の位置を制御するための弁に向けられた電流を増加させるように、かつ圧力センサから、検出された流体圧力を受け入れるように構成される。さらに、制御装置は、源の出口で測定された流体圧力に基づいて弁が流れ通過位置にあるかどうかを決定するように、かつ弁が流れ通過位置にあった場合、弁に向けられるクラッキングポイント電流コマンドを決定するように構成される。
【0011】
他の形態では、本開示は、弁を制御する実際の電流コマンドを決定するための方法に関する。弁は、流れ遮断位置と流れ通過位置との間で可動な弁体を含む。本方法は、弁体の所望の位置に基づいて定格電流コマンドを決定するステップと、弁の較正に基づいて較正オフセット電流コマンドを決定するステップと、定格電流コマンドと較正オフセット電流コマンドとを合算することによって実際の電流コマンドを決定するステップとを含む。
【図面の簡単な説明】
【0012】
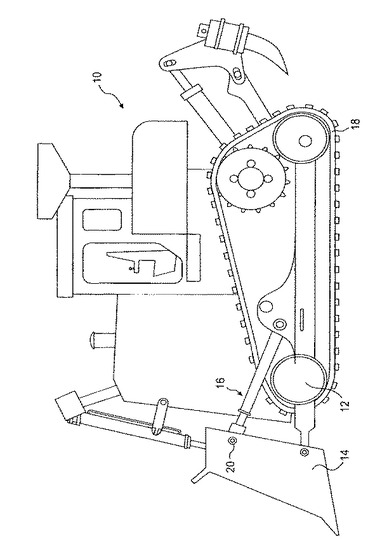
【図1】開示される例示的な実施形態による機械の概略側面図である。
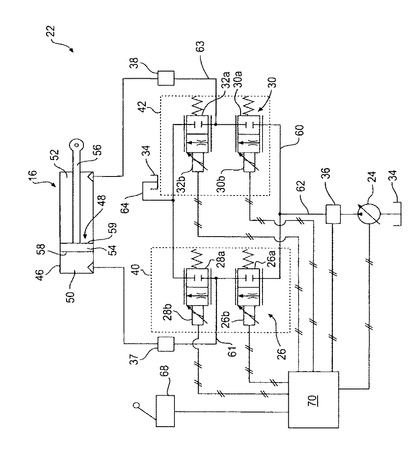
【図2】開示される例示的な実施形態による開示される例示的な液圧システムの概略図である。
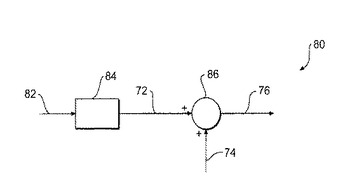
【図3】図2の液圧システムの弁を制御するための例示的な電流制御システムの概略図である。
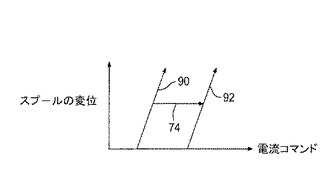
【図4】図3の電流制御システムを使用した弁スプールの変位と定格電流コマンドおよび実際の電流コマンドとの間の関係を示したグラフである。
【図5A】図2の液圧システムの弁を較正する開示される例示的な方法のフローチャートである。
【図5B】図2の液圧システムの弁を較正する開示される例示的な方法のフローチャートである。
【発明を実施するための形態】
【0013】
図1は、例示的な機械10を示している。機械10は、鉱業、建設業、農業等の産業、または公知の他の任意の産業に関連するある種の作業を行う固定機械または移動機械であり得る。例えば、機械10は、ブルドーザ、ローダ、バックホー、掘削機、モータグレーダ、ダンプトラック等の土工機械、または他の任意の土工機械であってもよい。さらに、機械10は、発電設備、ポンプ、船舶または他の任意の適切な作業実行機械を含み得る。機械10は、フレーム12と、少なくとも1つの器具14と、油圧シリンダ16、または器具14をフレーム12に接続する他の流体アクチュエータとを含むことが可能である。望むならば、油圧シリンダ16を省略して、油圧モータを含み得ることが考えられる。
【0014】
フレーム12は、機械10の移動を補助する任意の構造ユニットを含むことが可能である。フレーム12は、例えば、動力源(図示せず)を牽引装置18に接続する固定ベースフレーム、リンケージシステムの可動フレーム部材、または公知の他の任意のフレームであり得る。
【0015】
器具14は、仕事の実行に使用される任意の装置を含むことが可能である。例えば、器具14は、ブレード、バケット、ショベル、リッパ、ダンプベッド、推進装置または公知の他の任意の作業実行装置を含んでもよい。器具14は、直接的なピボット20を介して、1つの部材をリンケージシステムに形成する油圧シリンダ16を有するリンケージシステムを介して、または他の任意の適切な方法でフレーム12に接続されることが可能である。公知の他の任意の方法で、フレーム12に対して器具14を旋回、回転、摺動、揺動または移動させるように構成し得る。
【0016】
図2に示したように、油圧シリンダ16は、器具14を移動させるように協働する液圧システム22内の種々の構成部材の1つであり得る。液圧システム22は、加圧流体源24、ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30、ロッド端部ドレン弁32、タンク34および1つ以上の圧力センサ36、37、38を含むことが可能である。さらに、液圧システム22は、その流体構成部材と連通する制御装置70を含むことが可能である。液圧システム22が、例えば、圧力センサ、温度センサ、位置センサ、制御装置、アキュムレータ等の追加の構成部材および/または異なる構成部材、ならびに公知の他の構成部材を含み得ることが考えられる。例示的な液圧システム22は、較正すべき弁26、28、30、32と流体連通する油圧シリンダ16を含むが、較正すべき弁は、油圧シリンダへのおよびそこからの流れを制御する弁に限定されない。弁26、28、30、32等の1つ以上の弁を使用して、モータ回路、例えば油圧掘削機の揺動回路への流れ等のような他の種々のタイプの作動油の流れを制御することが可能である。
【0017】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のそれぞれは、源24、油圧シリンダ16、タンク34、および/または液圧システム22に存在する他の任意の装置と流体連通するように独立して動作可能である独立計量弁(IMV)であり得る。ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のそれぞれは、複数の油圧通路への作動油の流れを制御するように独立して計量されることが可能である。制御装置70は、独立して動作可能な弁26、28、30、32のそれぞれを制御する。
【0018】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のそれぞれは、個々の弁スプール26a、28a、30a、32aを所望の位置に移動させ、これにより、弁26、28、30、32を介した作動油の流れを制御するために、弁スプール26a、28a、30a、32aとアクチュエータ26b、28b、30b、32bとを含む。それぞれの弁スプール26a、28a、30a、32aの変位により、関連する弁26、28、30、32を介して作動油の流量が変化される。アクチュエータ26b、28b、30b、32bは、ソレノイドアクチュエータ、または当業者に公知の他の任意のアクチュエータであり得る。
【0019】
油圧シリンダ16は、管46とその中に配置されたピストンアセンブリ48とを含むことが可能である。管46およびピストンアセンブリ48の一方をフレーム12に旋回可能に接続することが可能であり、一方、管46およびピストンアセンブリ48の他方を器具14に旋回可能に接続することが可能である。その代わりに、管46および/またはピストンアセンブリ48をフレーム12または器具14に固定して接続し得ることが考えられる。油圧シリンダ16は、ピストンアセンブリ48によって分離された第1のチャンバ50および第2のチャンバ52を含むことが可能である。図2に示した例示的な実施形態では、第1のチャンバ50は油圧シリンダ16のヘッド端部により近接して配置され、また第2のチャンバ52は油圧シリンダ16のロッド端部により近接して配置される。源24によって加圧された流体を第1のチャンバ50および第2のチャンバ52に選択的に供給し、第1のチャンバおよび第2のチャンバをタンク34に流体接続して、ピストンアセンブリ48を管46内で変位させることが可能であり、これにより、油圧シリンダ16の有効長が変化される。油圧シリンダ16の伸縮は、器具14の移動を補助するように作用し得る。
【0020】
ピストンアセンブリ48は、管46に軸方向に整列されておりその中に配置されたピストン54と、フレーム12の一方を器具14に接続可能である(図1参照)ピストンロッド56とを含むことが可能である。ピストン54は、第1の油圧面58と、その反対側の第2の油圧面59とを含み得る。第1の油圧面58および第2の油圧面59に対する流体圧力によって生じる力の不均衡により、管46内でピストンアセンブリ48を移動させ得る。例えば、第1の油圧面58に対する力が、第2の油圧面59に対する力よりも大きいことにより、ピストンアセンブリ48を変位させて、油圧シリンダ16の有効長を長くすることが可能である。同様に、第2の油圧面59に対する力が、第1の油圧面58に対する力よりも大きい場合、管46内でピストンアセンブリ48を収縮させて、油圧シリンダ16の有効長を短くすることが可能である。Oリング等のシール用部材(図示せず)をピストン54に接続して、管46の内壁とピストン54の円筒外面との間の流体の流れを制限し得る。
【0021】
源24は、加圧流体の流れを生成するように構成されることが可能であり、例えば可変容量形ポンプ、固定容量形ポンプ等のポンプ、または公知の他の任意の加圧流体源を含むことが可能である。例えば、カウンタシャフト(図示せず)、ベルト(図示せず)、電気回路(図示せず)によって、または他の任意の適切な方法で、源24を機械10の動力源(図示せず)に駆動可能に接続し得る。源24は、加圧流体を液圧システム22のみに供給するための専用のものであり得るか、またはその代わりに、加圧流体を機械10内の追加の液圧システム(図示せず)に供給し得る。
【0022】
ヘッド端部弁部分40はヘッド端部供給弁26とヘッド端部ドレン弁28とを含む。ヘッド端部供給弁26は、源24と第1のチャンバ50との間に配置され、そして第1のチャンバ50への加圧流体の流れを調整するように構成されることが可能である。ヘッド端部供給弁26は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド26bによって作動され、そして流体が第1のチャンバ50に流入することを許容する第1の(開放)位置と、流体の流れが第1のチャンバ50から遮断される第2の(閉鎖)位置との間で弁スプール26aを移動させるように構成される。ヘッド端部ドレン弁28は、第1のチャンバ50とタンク34との間に配置され、そして第1のチャンバ50からタンク34への加圧流体の流れを調整するように構成されることが可能である。ヘッド端部ドレン弁28は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド28bによって作動され、そして流体が第1のチャンバ50から流れることを許容する第1の(開放)位置と、流体が第1のチャンバ50から流れるのを阻止する第2の(閉鎖)位置との間で弁スプール28aを移動させるように構成される。
【0023】
ロッド端部弁部分42はロッド端部供給弁30とロッド端部ドレン弁32とを含む。ロッド端部供給弁30は、源24と第2のチャンバ52との間に配置され、そして第2のチャンバ52への加圧流体の流れを調整するように構成されることが可能である。ロッド端部供給弁30は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド30bによって作動され、そして流体が第2のチャンバ52に流入することを許容する第1の(開放)位置と、流体が第2のチャンバ52から遮断される第2の(閉鎖)位置との間で弁スプール30aを移動させるように構成される。ロッド端部ドレン弁32は、第2のチャンバ52とタンク34との間に配置され、そして第2のチャンバ52からタンク34への加圧流体の流れを調整するように構成されることが可能である。ロッド端部ドレン弁32は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド32bによって作動され、そして流体が第2のチャンバ52から流れることを許容する第1の(開放)位置と、流体が第2のチャンバ52から流れるのを阻止する第2の(閉鎖)位置との間で弁スプール32aを移動させるように構成される。
【0024】
1つ以上のヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32は、例えば比例弁体等の追加のまたは異なる弁機構、あるいは公知の他の任意の弁機構を含み得る。さらにその代わりに、1つ以上のヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32は、油圧的に作動されるか、機械的に作動されるか、空気圧で作動されるかまたは他の任意の適切な方法で作動されることが可能である。液圧システム22は、その中の流体圧力および/または流れを制御するために、リリーフ弁、補給弁、シャトル弁、チェック弁、流体力学的に作動される比例制御弁等のような追加の構成部材を含み得る。例えば、流体圧力を調整するためのバイパス弁(図示せず)を設けてもよい。バイパス弁は、ポンプ24からの流れをタンク34に迂回させることを許容し得る。
【0025】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32を相互に流体接続することが可能である。特に、ヘッド端部供給弁26およびロッド端部供給弁30を上流流体通路60に並列に接続し得る。供給通路62を介してポンプ24から加圧流体を受け入れるように、共通の上流流体通路60を接続することが可能である。ヘッド端部ドレン弁28およびロッド端部ドレン弁32をドレン通路64に並列に接続し得る。ヘッド端部供給弁26およびヘッド端部戻り弁28を第1のチャンバ流体通路61に並列に接続することが可能である。ロッド端部供給弁30およびロッド端部戻り弁32を第2のチャンバ流体通路63に並列に接続し得る。
【0026】
タンク34は、流体供給を保持するように構成されたリザーバとして構成され得る。流体は、例えば、専用の作動油、エンジン潤滑油、変速機潤滑油または公知の他の任意の流体を含むことが可能である。機械10内の1つ以上の液圧システムは、タンク34から流体を吸い込み、その流体をタンク34に戻すことが可能である。さらに、液圧システム22を多数の別個の流体タンクに接続し得ることが考えられる。
【0027】
その上、液圧システム22は1つ以上の圧力センサ36、37、38を含む。例えば、ポンプ24の出力圧力Pを監視する圧力センサ36を流体供給通路62に設けてもよい。流体がポンプ24から液圧システム22に通過したときに、流体供給通路62の圧力センサ36は、ポンプ24により供給されて液圧システム22に入る流体の出力圧力Pを監視し、測定された圧力を反映する出力信号を制御装置70に送信する。ポンプ24によって供給される所望の流体圧力を決定するのに適切な任意の位置に、1つまたは複数の圧力センサ36、37、38を配置できる。以下に説明する例示的な較正方法により、圧力センサ36を使用してポンプ24の出力圧力Pが決定される。また、較正方法により、液圧システム22の他の位置で、例えば圧力センサ37、38等の1つまたは複数の圧力センサを使用して圧力Pを決定し得ることが理解される。図2に示したように、圧力センサ37は、油圧シリンダ16の第1のチャンバ50に関連する圧力を監視し、また圧力センサ38は、油圧シリンダ16の第2のチャンバ52に関連する圧力を監視する。当業者は、圧力センサ36、37、38が、ポンプ24によって供給されおよび/または液圧システム22に入る流体の圧力を確認できる任意の圧力センサアセンブリを含み得ることを認識するであろう。さらに、圧力センサ36、37、38の1つまたは複数の位置および数は、図2に示した特定の構造に限定されない。
【0028】
制御装置70は、液圧システム22の動作を制御するための手段を含む単一のマイクロプロセッサまたは複数のマイクロプロセッサとして具体化され得る。制御装置70の機能を実行するように、商業的に入手可能な多数のマイクロプロセッサを構成できる。機械の多数の機能を制御できる機械の一般的なマイクロプロセッサで、制御装置70を容易に具体化し得ることを理解されたい。制御装置70はメモリと、二次記憶装置と、プロセッサと、アプリケーションを動作させるための他の任意のコンポーネントとを含むことが可能である。電源回路、信号調整回路、ソレノイド駆動回路および他のタイプの回路等の他の種々の回路を制御装置70に関連付け得る。制御装置70を少なくとも1つの操作者入力装置68に接続することが可能であり、この操作者入力装置により、操作者が、1つ以上のペダル、スイッチ、ダイヤル、パドル、ジョイスティック等のような公知の1つ以上の制御装置を使用して、液圧システム22の1つ以上の構成部材の動作を制御することが許容される。
【0029】
制御装置70は、圧力センサ36と、ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のアクチュエータ26b、28b、30b、32bとに電気的に結合される。制御装置70は、圧力センサ36から圧力示度を受信し、そして操作者入力装置68から入力を受信するように構成され得る。制御装置70は1つ以上の電気コマンド信号をアクチュエータ26b、28b、30b、32bに送信する。1つまたは複数の電気コマンド信号に応じて、1つ以上のアクチュエータ26b、28b、30b、32bが種々の力を加えて、1つ以上の弁スプール26a、28a、30a、32aを所望の変位位置に制御可能に移動させ、液圧システム22を介した作動油の流れを制御する。
【0030】
操作者入力装置68を使用した操作者入力に応じて、流体圧力により油圧シリンダ16を可動であり得る。流体は、源24によって加圧されて、ヘッド端部供給弁26とロッド端部供給弁30とに向けられることが可能である。ピストンアセンブリ48を伸長または収縮させるための操作者入力に応じて、ヘッド端部供給弁26およびロッド端部供給弁30の一方が開放位置に移動して、加圧流体を第1のチャンバ50および第2のチャンバ52の適切な一方に向けることが可能である。実質的に同時に、ヘッド端部ドレン弁28およびロッド端部ドレン弁32の一方が開放位置に移動して、流体を第1のチャンバ50および第2のチャンバ52の適切な一方からタンク34に向け、ピストンアセンブリ48を移動させるピストン54を隔てた圧力差を発生させることが可能である。例えば、油圧シリンダ16の伸長が要求された場合、ヘッド端部供給弁26が開放位置に移動して、加圧流体を源24から第1のチャンバ50に向けてもよい。加圧流体を第1のチャンバ50に向けるのと実質的に同時に、ロッド端部ドレン弁32が開放位置に移動して、流体を第2のチャンバ52からタンク34に排出することを許容し得る。油圧シリンダ16の収縮が要求された場合、ロッド端部供給弁30が開放位置に移動して、加圧流体を源24から第2のチャンバ52に向けることが可能である。加圧流体を第2のチャンバ52に向けるのと実質的に同時に、ヘッド端部ドレン弁28が開放位置に移動して、流体を第1のチャンバ50からタンク34に排出することを許容し得る。
【0031】
図3は、弁26、28、30、32を制御するための制御装置70の例示的な電流制御システム80を示している。電流制御システム80は、弁26、28、30、32のために、所望のスプール変位を反映するスプール変位コマンド82を受信する。上述したように、例えば、第1のチャンバ50および第2のチャンバ52の一方にまたはそこから向けるための所望量の流体に基づいて、スプール変位コマンド82を決定し得る。
【0032】
電流制御システム80はスプール変位コマンド82をアクチュエータ変換器84に送信する。アクチュエータ変換器84は、スプール変位コマンド82に基づいて定格(または所望の)電流コマンド72を発生させる。次に、電流制御システム80が定格電流コマンド72を修正器86に送信し、この修正器が、定格電流コマンド72に基づいて実際の電流コマンド76を出力する。図3に示した例示的な実施形態では、修正器86は、定格電流コマンド72と較正オフセット電流コマンド74とを合算することによって実際の電流コマンド76を決定する。実際の電流コマンド76は個々の弁26、28、30、32のアクチュエータ26b、28b、30b、32bに送信される。
【0033】
以下に説明するような較正方法によって、それぞれの弁26、28、30、32のために較正オフセット電流コマンド74が決定される。弁26、28、30、32の較正は、較正されている弁を介して流れが開始するポイントを決定するステップを含み、このポイントは一般にクラッキングポイントと呼ばれる。例えば、液圧システム22を組み立てた後に、作業場で周期的に、あるイベントの後等に、1つ以上の弁26、28、30、32の較正を1回または複数回行うことが可能である。例示的な実施形態では、較正オフセット電流コマンド74は、弁26、28、30、32の較正中に決定されるクラッキングポイントの制御装置70からの電流コマンドに基づく。例示的な実施形態では、較正オフセット電流コマンド74は、クラッキングポイント電流コマンド、すなわち、以下に説明する較正方法を用いて決定されたクラッキングポイントにおける電流コマンドから、クラッキングポイントにおいて予期される(または望まれる)電流コマンドを引いたものに等しい。クラッキングポイントにおいて予期される電流コマンドは、個々の弁26、28、30、32を開放するために予期される所定の電流コマンドである。しかし、較正オフセット電流コマンド74が、弁26、28、30、32に関連する他の要因等に依存することも可能であることが理解される。
【0034】
図4は、弁スプール26a、28a、30a、32aの1つの変位と、制御装置70から、関連するアクチュエータ26b、28b、30b、32bへの、図3に示した電流制御システム80を使用して決定される電流コマンドとの間の例示的な関係を示している。定格制御曲線90は、定格電流コマンド72に対する弁スプールの変位を示している。実際の制御曲線92は、実際の電流コマンド76に対する弁スプールの変位を示している。図4に示したように、定格制御曲線90(定格電流コマンド72に対応する)と実際の制御曲線92(実際の電流コマンド76に対応する)との間の差は、較正オフセット電流コマンド74である。
【0035】
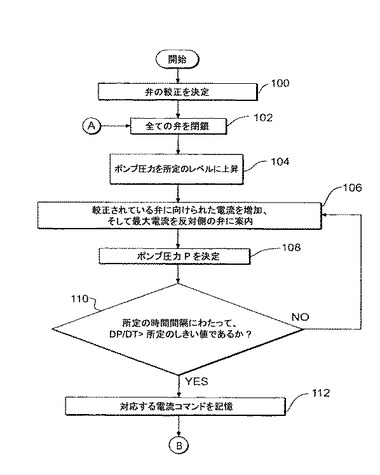
図5Aと図5Bは、開示されるいくつかの実施形態に従ってクラッキングポイント電流コマンドを決定することによって液圧システム22を較正する例示的な方法を示したフローチャートを示している。図5Aに示したように、制御装置70は、どの弁26、28、30、32を較正するかを決定し得る(ステップ100)。制御装置70によってあるいは操作者または他の実体によって、弁26、28、30、32を自動的に選択することが可能であり、また選択を示す情報を制御装置70に送信することが可能である。次のステップはヘッド端部供給弁26の較正を示す。また、ヘッド端部ドレン弁28、ロッド端部供給弁30またはロッド端部ドレン弁32の較正時にも、同様のステップが行われることが理解される。
【0036】
制御装置70は、ゼロ電流または実質的にゼロの電流を全ての弁26、28、30、32に供給することによって全ての弁26、28、30、32を閉鎖し得る(ステップ102)。次に、制御装置70は、コマンドをポンプ24に送信して、その出力圧力Pを所定のレベルに上昇させる(ステップ104)。さらに、制御装置70は、ポンプ24から下流に配置されたバイパス弁(図示せず)にコマンドを送信して、ポンプ24からの出力圧力Pを上昇させることが可能である。ポンプ24からの流体は所定の圧力レベルで少なくとも弁部分40(すなわち、較正されている弁を含む弁部分)に供給される。例示的な実施形態では、ポンプ24は流体を両方の弁部分40、42に供給する。
【0037】
次に、制御装置70が、ヘッド端部供給弁26のアクチュエータ26b(すなわち、較正されている弁のアクチュエータ)への電流を増加させ、さらに、実質的に同時に、制御装置70が、ヘッド端部ドレン弁28のアクチュエータ28b(すなわち、較正されている弁と同一の弁部分の反対側の弁のアクチュエータ)に最大電流を向ける(ステップ106)。結果として、アクチュエータ28bへの最大電流により、ヘッド端部ドレン弁28が完全に開放される。制御装置70が、ヘッド端部供給弁26のアクチュエータ26bに向けられる電流を増加させたとき、ポンプ24の出力圧力Pが圧力センサ36によって測定される。圧力センサ36は、測定された出力圧力Pを反映する出力信号を制御装置70に送信する(ステップ108)。
【0038】
さらに、制御装置70は、時間に対するポンプ24の測定された出力圧力Pの導関数dP/dt、すなわち圧力変化率を計算する。制御装置70がヘッド端部供給弁26のアクチュエータ26bへの電流を増加させたとき、ポンプ24の測定された出力圧力Pの導関数dP/dtはゼロであり、同時に、ヘッド端部供給弁26が閉鎖される。ヘッド端部供給弁26が開放して、流れの通過を許容したときに、ポンプ24の出力圧力Pが減少して、ポンプ24の出力圧力Pの導関数dP/dtが急速に変化する。制御装置70は、導関数dP/dtを監視し、そして導関数dP/dtが、所定のしきい値よりも大きく、所定の時間間隔にわたってしきい値を上回っているときを決定する(ステップ110)。例えば、制御装置70は、ポンプ24の測定された出力圧力Pの導関数dP/dtが、所定のしきい値よりも大きく、所定の時間間隔(例えば0.5秒、1秒等)にわたって所定のしきい値を上回り続けているときを決定することが可能である。所定の時間間隔が経過する前に、導関数dP/dtが所定のしきい値以下か、または導関数dP/dtが所定のしきい値を上回り続けない場合(ステップ110;いいえ)、工程はステップ106に戻る。次に、導関数dP/dtが所定の時間間隔にわたって所定のしきい値よりも大きくなるまで、制御装置70は、ヘッド端部供給弁26のアクチュエータ26bへの電流を増加させ続け、またポンプ24の出力圧力Pの導関数dP/dtを計算し続ける(ステップ106〜110)。
【0039】
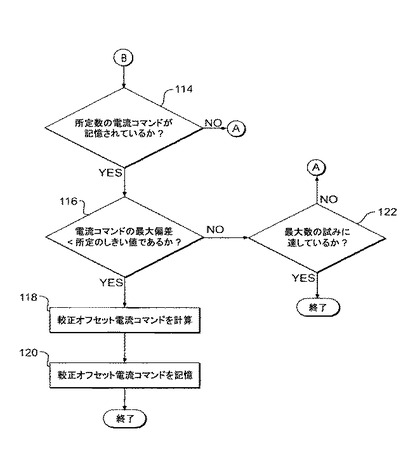
導関数dP/dtが所定の時間間隔にわたって所定のしきい値よりも大きいことを制御装置70が決定した場合(ステップ110;はい)、制御装置70は、ポンプ24の出力圧力Pの導関数dP/dtが所定のしきい値を上回り始めたときに、すなわち、導関数dP/dtが所定のしきい値を上回り続けている所定の時間間隔の開始時に、ヘッド端部供給弁26のアクチュエータ26bに送信される電流コマンドを決定して記憶する(ステップ112)。次に、図5Bに示したように、制御装置70は、記憶された電流コマンドの数を決定して、所定数の(例えば3つの)電流コマンドが記憶されているかどうかを決定する(ステップ114)。所定数の電流コマンドが記憶されていなかった場合(ステップ114;いいえ)、工程はステップ102に戻り、この結果、制御装置70は、他の電流コマンドを決定して記憶し、次に、所定数の電流コマンドが記憶されているかどうかを決定することが可能である(ステップ102〜114)。
【0040】
所定数の電流コマンドが記憶された後(ステップ114;はい)、制御装置70は、記憶された電流コマンドの平均と、計算された平均からの最大偏差とを計算する。最大偏差は、記憶された所定数の電流コマンドと、計算された平均との間の最大差である。次に、制御装置70は、最大偏差が所定のしきい値よりも小さいかどうかを決定する(ステップ116)。
【0041】
最大偏差が所定のしきい値よりも小さかった場合(ステップ116;はい)、制御装置70は、記憶された電流コマンドの計算された平均から、予期されるクラッキングポイント電流コマンドを引くことによって、ヘッド端部供給弁26用の較正オフセット電流コマンド74を計算する(ステップ118)。制御装置70は、計算された較正オフセット電流コマンド74を記憶し(ステップ120)、次に、ヘッド端部供給弁26の較正が完了する。次に、図5Aと図5Bに示した工程は、ヘッド端部ドレン弁28、ロッド端部供給弁30またはロッド端部ドレン弁32が、較正すべき弁であることを決定する(ステップ100)制御装置70によって繰り返すことが可能である。
【0042】
ステップ116において、最大偏差が所定のしきい値よりも大きかった場合(ステップ116;いいえ)、制御装置70は、クラッキングポイント電流コマンドを決定するための所定の最大数の(例えば8つの)試みに達しているかどうかを決定する(ステップ122)。所定の最大数の試みに達していなかった場合(ステップ122;いいえ)、工程はステップ102に戻り、この結果、制御装置70は、ステップ102〜116を繰り返し、最古のクラッキングポイント電流コマンドを除去し、そして最新のクラッキングポイント電流コマンドで他の最大偏差を計算することによって、他のクラッキングポイント電流コマンドを決定し得る。しかし、所定の最大数の試みに達している場合(ステップ122;はい)、ヘッド端部供給弁26の較正は完了せず、較正オフセット電流コマンド74は、例えば、ゼロであるか、または以前に決定された較正オフセット電流コマンドであり得る。その後、クラッキングポイント電流コマンドを決定しまた較正オフセット電流コマンド74を計算するために、工程はステップ102に戻ることが可能である。
【産業上の利用可能性】
【0043】
開示される較正方法は、アクチュエータに供給される流体の圧力および/または流れの均衡が望まれる流体アクチュエータを制御するためのIMVの構造等の任意の弁構造に適用でき得る。開示される較正方法は、低コストの簡単な構成で一貫したアクチュエータ性能を提供することが可能であり、また弁構造の弁の正確な位置決めを実現することが可能である。
【0044】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のいずれかを較正する方法は、クラッキングポイント電流コマンド、すなわち、較正されている弁が流体の通過を許容し始める電流コマンドを決定するステップを含む。例示的な実施形態では、較正オフセット電流コマンド74は、クラッキングポイントにおいて予期される電流コマンドを引いたクラッキングポイント電流コマンドである。実際の電流コマンド76を決定するために、較正オフセット電流コマンド74が定格電流コマンド72に加えられる。したがって、開示される例示的な較正方法を用いて決定されたクラッキングポイント電流コマンドに基づき、実際の弁の動作を予測し得る。実際の電流コマンド76は、個々の弁26、28、30、32を制御するために制御装置70から弁26、28、30、32のアクチュエータ26b、28b、30b、32bに送信され、定格電流コマンド72と較正オフセット電流コマンド74とを合算することによって決定される。
【0045】
定格制御曲線90をシフトするために、較正オフセット電流コマンド74が用いられ、この結果、弁26、28、30、32の性能が実際の制御曲線92になる。このシフトは、例えば、個別の構成部材の構造および/または組立の変化により、定格の(または所望の)弁の位置と比較した実際の弁の動作の変化を補償する。
【0046】
ヘッド端部供給弁26の較正中、ポンプ出力圧力Pが所定のレベルに上昇したとき、最初に、ゼロ電流が弁26、28、30、32のアクチュエータ26b、28b、30b、32bに印加される。結果として、流体が弁26、28、30、32に流れ始める。電流がヘッド端部供給弁26のアクチュエータ26bに印加され、アクチュエータ26bに印加された電流がゼロから上昇し、一方、所定のレベルの最大電流がヘッド端部ドレン弁28のアクチュエータ28bに印加される。それに対して、ポンプ出力圧力Pが監視される。弁26、28、30、32の較正中にポンプ出力圧力Pが監視されるので、ポンプ24の出口の近傍に配置された単一の圧力センサ36によって、弁26、28、30、32毎の較正を行うことが可能である。したがって、より少数の圧力センサで済ませることが可能であり、これにより、弁較正方法が簡単になり、複数の圧力センサを使用した場合に生じることがある偏差が低減される。
【0047】
ポンプ出力圧力Pの導関数dP/dtが計算されて、所定のしきい値と比較される。導関数dP/dtが所定の時間間隔にわたって所定のしきい値を上回っている場合、時間間隔の開始時にアクチュエータ26bに印加される電流コマンドが決定されて記憶される。所定の時間間隔にわたって所定のしきい値よりも大きくなる導関数dP/dtの条件を適用することによって、弁26、28、30、32が開放しているときのより正確な判定を決定することが可能である。
【0048】
所定の弁26、28、30、32用の較正を複数回行うことが可能であり、それぞれの回で、最大偏差が計算される。最大偏差が所定のしきい値を下回ったとき、所定の弁26、28、30、32の較正は有効であると考えられ、対応する較正オフセット電流コマンド74が記憶される。結果として、圧力スパイク等の圧力過渡現象および圧力センサノイズが、無効な較正を生じさせることを防止することが可能である。したがって、状態が必ずしも厳しく制御されるとは限らない音場較正に対して、圧力に基づく較正はより一貫しており適切に正確であり得る。
【0049】
IMVを較正するための方法に種々の修正および変更をなし得ることが当業者には明らかであろう。他の実施形態は、IMVを較正するための開示される方法の仕様および実施を考慮すれば当業者には明らかであろう。仕様および実施例は例示的なものに過ぎないと考えるべきであり、真の範囲は、次の特許請求の範囲およびそれらの等価物によって示されることが意図される。
【技術分野】
【0001】
本開示は、一般に、弁を較正するための方法、より詳しくは、独立計量弁を較正するための方法に関する。
【背景技術】
【0002】
例えば、ブルドーザ、ローダ、掘削機、モータグレーダ等の機械、および他のタイプの重機械には、種々の仕事を実現するために1つ以上の油圧アクチュエータが使用される。これらのアクチュエータは、それらの中のチャンバに加圧流体を供給する機械のポンプに流体接続される。アクチュエータのチャンバへのおよびそこからの加圧流体の流量および方向を制御するために、弁構造は、典型的に、ポンプとアクチュエータの少なくとも1つとの間に流体接続される。
【0003】
弁構造は、加圧された作動油がポンプからアクチュエータ室に流れることを許容するように独立して作動される独立計量弁(IMV)を含み得る。それぞれのIMVの弁スプールの変位を変化させることによって、それぞれのアクチュエータ室への作動油の流れの量を制御できる。それぞれの弁スプールは、ポンプからアクチュエータへの流れとアクチュエータからタンクへの流れとを含む弁構造の作動油の流れを制御する一連の計量スロットを有する。アクチュエータが油圧シリンダであった場合、これらの流れは、一般に、ポンプからシリンダへの流れおよびシリンダからタンクへの流れとそれぞれ呼ばれる。
【0004】
IMVの製造および組立は、それぞれのIMVが他のものとは異なって機能し得るように弁構成部材の性能に影響を及ぼすかもしれない。結果として、弁構成部材が予測可能に動作しない可能性があり、油圧アクチュエータの性能が低下する場合がある。
【0005】
ポンプとアクチュエータとの間に流体接続された弁構造を介して流れを制御する1つの方法が、スティーブンソン(Stephenson)に交付された(特許文献1)に記載されている。(特許文献1)は、アクチュエータ室に接続された入口弁または出口弁を較正する方法を記載している。入口弁は、アクチュエータ室に供給される流れの量を制御し、また出口弁は、アクチュエータ室から出る流れの量を制御する。入口弁を較正するために、入口を作動させるための電流が増加する間に出口弁が閉鎖され、これにより、アクチュエータ室内の圧力が上昇する。アクチュエータ室内の圧力の上昇率が所定のしきい値を超えたときに、入口弁用の弁開放電流レベルが決定される。出口弁を較正するために、入口弁が開放され、この結果、アクチュエータ室内の圧力が上昇する。次に、入口弁が閉鎖され、出口弁を作動させるための電流が増加される。アクチュエータ室内の圧力の低下率の大きさが所定のしきい値を超えたときに、出口弁用の弁開放電流レベルが決定される。その較正により、入口弁または出口弁用の弁開放電流レベルと個々の弁用の初期電流レベルとの間の差が、少なくとも1つの所望のマージンだけ異なることが保証される。
【0006】
(特許文献1)の較正方法により、最初に弁に印加される予め規定される初期電流レベルが決定される。この初期電流レベルは、弁が開放し始める電流レベルよりも低い所望の大きさである。測定された弁開放電流レベルと初期電流レベルとの間に差が存在する場合にのみ、入口弁または出口弁に供給される初期電流レベルが調整される。さらに、(特許文献1)は、個々のシリンダポートで圧力センサを必要とし、それぞれのシリンダポートでセンサを必要とする。このことにより、センサの数が増加し、これによって較正工程の複雑さが増す。その上、(特許文献1)では、圧力変化率が所定のしきい値に達したときに弁開放電流レベルが測定されるが、圧力変化率が所定の時間間隔にわたって所定のしきい値を上回っているかどうかが決定されない。したがって、(特許文献1)の較正方法は、信号ノイズ、あるいは入口弁または出口弁を通る漏れにより圧力変化率の測定に誤差が生じた場合、弁開放電流レベルを早めに決定してしまうことがある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第6,397,655号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
開示されるシステムは、上述の課題の1つ以上を克服することに向けられる。
【課題を解決するための手段】
【0009】
一形態では、本開示は、流れ遮断位置と流れ通過位置との間で可動な弁体を有する弁を較正するための方法に関する。本方法は、弁に向けられた流体を加圧するステップと、弁体の位置を制御するための弁に向けられた電流を増加させるステップと、流体圧力を検出するステップとを含む。さらに、弁を較正するための本方法は、検出された流体圧力の時間導関数が所定の時間間隔にわたって所定のしきい値よりも大きいかどうかを決定するステップと、弁に向けられるクラッキングポイント電流コマンドを決定するステップとを含む。検出された流体圧力の時間導関数が所定のしきい値よりも大きい場合、クラッキングポイント電流コマンドが弁に向けられる。
【0010】
他の形態では、本開示は、流れ遮断位置と流れ通過位置との間で可動な弁体を有する弁を較正するためのシステムに関する。システムは、流体を加圧するように構成された源と、その出口で流体圧力を検出するように構成された圧力センサと、それに接続された制御装置とを含む。制御装置は、弁体の位置を制御するための弁に向けられた電流を増加させるように、かつ圧力センサから、検出された流体圧力を受け入れるように構成される。さらに、制御装置は、源の出口で測定された流体圧力に基づいて弁が流れ通過位置にあるかどうかを決定するように、かつ弁が流れ通過位置にあった場合、弁に向けられるクラッキングポイント電流コマンドを決定するように構成される。
【0011】
他の形態では、本開示は、弁を制御する実際の電流コマンドを決定するための方法に関する。弁は、流れ遮断位置と流れ通過位置との間で可動な弁体を含む。本方法は、弁体の所望の位置に基づいて定格電流コマンドを決定するステップと、弁の較正に基づいて較正オフセット電流コマンドを決定するステップと、定格電流コマンドと較正オフセット電流コマンドとを合算することによって実際の電流コマンドを決定するステップとを含む。
【図面の簡単な説明】
【0012】
【図1】開示される例示的な実施形態による機械の概略側面図である。
【図2】開示される例示的な実施形態による開示される例示的な液圧システムの概略図である。
【図3】図2の液圧システムの弁を制御するための例示的な電流制御システムの概略図である。
【図4】図3の電流制御システムを使用した弁スプールの変位と定格電流コマンドおよび実際の電流コマンドとの間の関係を示したグラフである。
【図5A】図2の液圧システムの弁を較正する開示される例示的な方法のフローチャートである。
【図5B】図2の液圧システムの弁を較正する開示される例示的な方法のフローチャートである。
【発明を実施するための形態】
【0013】
図1は、例示的な機械10を示している。機械10は、鉱業、建設業、農業等の産業、または公知の他の任意の産業に関連するある種の作業を行う固定機械または移動機械であり得る。例えば、機械10は、ブルドーザ、ローダ、バックホー、掘削機、モータグレーダ、ダンプトラック等の土工機械、または他の任意の土工機械であってもよい。さらに、機械10は、発電設備、ポンプ、船舶または他の任意の適切な作業実行機械を含み得る。機械10は、フレーム12と、少なくとも1つの器具14と、油圧シリンダ16、または器具14をフレーム12に接続する他の流体アクチュエータとを含むことが可能である。望むならば、油圧シリンダ16を省略して、油圧モータを含み得ることが考えられる。
【0014】
フレーム12は、機械10の移動を補助する任意の構造ユニットを含むことが可能である。フレーム12は、例えば、動力源(図示せず)を牽引装置18に接続する固定ベースフレーム、リンケージシステムの可動フレーム部材、または公知の他の任意のフレームであり得る。
【0015】
器具14は、仕事の実行に使用される任意の装置を含むことが可能である。例えば、器具14は、ブレード、バケット、ショベル、リッパ、ダンプベッド、推進装置または公知の他の任意の作業実行装置を含んでもよい。器具14は、直接的なピボット20を介して、1つの部材をリンケージシステムに形成する油圧シリンダ16を有するリンケージシステムを介して、または他の任意の適切な方法でフレーム12に接続されることが可能である。公知の他の任意の方法で、フレーム12に対して器具14を旋回、回転、摺動、揺動または移動させるように構成し得る。
【0016】
図2に示したように、油圧シリンダ16は、器具14を移動させるように協働する液圧システム22内の種々の構成部材の1つであり得る。液圧システム22は、加圧流体源24、ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30、ロッド端部ドレン弁32、タンク34および1つ以上の圧力センサ36、37、38を含むことが可能である。さらに、液圧システム22は、その流体構成部材と連通する制御装置70を含むことが可能である。液圧システム22が、例えば、圧力センサ、温度センサ、位置センサ、制御装置、アキュムレータ等の追加の構成部材および/または異なる構成部材、ならびに公知の他の構成部材を含み得ることが考えられる。例示的な液圧システム22は、較正すべき弁26、28、30、32と流体連通する油圧シリンダ16を含むが、較正すべき弁は、油圧シリンダへのおよびそこからの流れを制御する弁に限定されない。弁26、28、30、32等の1つ以上の弁を使用して、モータ回路、例えば油圧掘削機の揺動回路への流れ等のような他の種々のタイプの作動油の流れを制御することが可能である。
【0017】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のそれぞれは、源24、油圧シリンダ16、タンク34、および/または液圧システム22に存在する他の任意の装置と流体連通するように独立して動作可能である独立計量弁(IMV)であり得る。ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のそれぞれは、複数の油圧通路への作動油の流れを制御するように独立して計量されることが可能である。制御装置70は、独立して動作可能な弁26、28、30、32のそれぞれを制御する。
【0018】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のそれぞれは、個々の弁スプール26a、28a、30a、32aを所望の位置に移動させ、これにより、弁26、28、30、32を介した作動油の流れを制御するために、弁スプール26a、28a、30a、32aとアクチュエータ26b、28b、30b、32bとを含む。それぞれの弁スプール26a、28a、30a、32aの変位により、関連する弁26、28、30、32を介して作動油の流量が変化される。アクチュエータ26b、28b、30b、32bは、ソレノイドアクチュエータ、または当業者に公知の他の任意のアクチュエータであり得る。
【0019】
油圧シリンダ16は、管46とその中に配置されたピストンアセンブリ48とを含むことが可能である。管46およびピストンアセンブリ48の一方をフレーム12に旋回可能に接続することが可能であり、一方、管46およびピストンアセンブリ48の他方を器具14に旋回可能に接続することが可能である。その代わりに、管46および/またはピストンアセンブリ48をフレーム12または器具14に固定して接続し得ることが考えられる。油圧シリンダ16は、ピストンアセンブリ48によって分離された第1のチャンバ50および第2のチャンバ52を含むことが可能である。図2に示した例示的な実施形態では、第1のチャンバ50は油圧シリンダ16のヘッド端部により近接して配置され、また第2のチャンバ52は油圧シリンダ16のロッド端部により近接して配置される。源24によって加圧された流体を第1のチャンバ50および第2のチャンバ52に選択的に供給し、第1のチャンバおよび第2のチャンバをタンク34に流体接続して、ピストンアセンブリ48を管46内で変位させることが可能であり、これにより、油圧シリンダ16の有効長が変化される。油圧シリンダ16の伸縮は、器具14の移動を補助するように作用し得る。
【0020】
ピストンアセンブリ48は、管46に軸方向に整列されておりその中に配置されたピストン54と、フレーム12の一方を器具14に接続可能である(図1参照)ピストンロッド56とを含むことが可能である。ピストン54は、第1の油圧面58と、その反対側の第2の油圧面59とを含み得る。第1の油圧面58および第2の油圧面59に対する流体圧力によって生じる力の不均衡により、管46内でピストンアセンブリ48を移動させ得る。例えば、第1の油圧面58に対する力が、第2の油圧面59に対する力よりも大きいことにより、ピストンアセンブリ48を変位させて、油圧シリンダ16の有効長を長くすることが可能である。同様に、第2の油圧面59に対する力が、第1の油圧面58に対する力よりも大きい場合、管46内でピストンアセンブリ48を収縮させて、油圧シリンダ16の有効長を短くすることが可能である。Oリング等のシール用部材(図示せず)をピストン54に接続して、管46の内壁とピストン54の円筒外面との間の流体の流れを制限し得る。
【0021】
源24は、加圧流体の流れを生成するように構成されることが可能であり、例えば可変容量形ポンプ、固定容量形ポンプ等のポンプ、または公知の他の任意の加圧流体源を含むことが可能である。例えば、カウンタシャフト(図示せず)、ベルト(図示せず)、電気回路(図示せず)によって、または他の任意の適切な方法で、源24を機械10の動力源(図示せず)に駆動可能に接続し得る。源24は、加圧流体を液圧システム22のみに供給するための専用のものであり得るか、またはその代わりに、加圧流体を機械10内の追加の液圧システム(図示せず)に供給し得る。
【0022】
ヘッド端部弁部分40はヘッド端部供給弁26とヘッド端部ドレン弁28とを含む。ヘッド端部供給弁26は、源24と第1のチャンバ50との間に配置され、そして第1のチャンバ50への加圧流体の流れを調整するように構成されることが可能である。ヘッド端部供給弁26は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド26bによって作動され、そして流体が第1のチャンバ50に流入することを許容する第1の(開放)位置と、流体の流れが第1のチャンバ50から遮断される第2の(閉鎖)位置との間で弁スプール26aを移動させるように構成される。ヘッド端部ドレン弁28は、第1のチャンバ50とタンク34との間に配置され、そして第1のチャンバ50からタンク34への加圧流体の流れを調整するように構成されることが可能である。ヘッド端部ドレン弁28は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド28bによって作動され、そして流体が第1のチャンバ50から流れることを許容する第1の(開放)位置と、流体が第1のチャンバ50から流れるのを阻止する第2の(閉鎖)位置との間で弁スプール28aを移動させるように構成される。
【0023】
ロッド端部弁部分42はロッド端部供給弁30とロッド端部ドレン弁32とを含む。ロッド端部供給弁30は、源24と第2のチャンバ52との間に配置され、そして第2のチャンバ52への加圧流体の流れを調整するように構成されることが可能である。ロッド端部供給弁30は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド30bによって作動され、そして流体が第2のチャンバ52に流入することを許容する第1の(開放)位置と、流体が第2のチャンバ52から遮断される第2の(閉鎖)位置との間で弁スプール30aを移動させるように構成される。ロッド端部ドレン弁32は、第2のチャンバ52とタンク34との間に配置され、そして第2のチャンバ52からタンク34への加圧流体の流れを調整するように構成されることが可能である。ロッド端部ドレン弁32は2位置バネ付勢式弁機構を含むことが可能であり、この2位置バネ付勢式弁機構は、ソレノイド32bによって作動され、そして流体が第2のチャンバ52から流れることを許容する第1の(開放)位置と、流体が第2のチャンバ52から流れるのを阻止する第2の(閉鎖)位置との間で弁スプール32aを移動させるように構成される。
【0024】
1つ以上のヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32は、例えば比例弁体等の追加のまたは異なる弁機構、あるいは公知の他の任意の弁機構を含み得る。さらにその代わりに、1つ以上のヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32は、油圧的に作動されるか、機械的に作動されるか、空気圧で作動されるかまたは他の任意の適切な方法で作動されることが可能である。液圧システム22は、その中の流体圧力および/または流れを制御するために、リリーフ弁、補給弁、シャトル弁、チェック弁、流体力学的に作動される比例制御弁等のような追加の構成部材を含み得る。例えば、流体圧力を調整するためのバイパス弁(図示せず)を設けてもよい。バイパス弁は、ポンプ24からの流れをタンク34に迂回させることを許容し得る。
【0025】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32を相互に流体接続することが可能である。特に、ヘッド端部供給弁26およびロッド端部供給弁30を上流流体通路60に並列に接続し得る。供給通路62を介してポンプ24から加圧流体を受け入れるように、共通の上流流体通路60を接続することが可能である。ヘッド端部ドレン弁28およびロッド端部ドレン弁32をドレン通路64に並列に接続し得る。ヘッド端部供給弁26およびヘッド端部戻り弁28を第1のチャンバ流体通路61に並列に接続することが可能である。ロッド端部供給弁30およびロッド端部戻り弁32を第2のチャンバ流体通路63に並列に接続し得る。
【0026】
タンク34は、流体供給を保持するように構成されたリザーバとして構成され得る。流体は、例えば、専用の作動油、エンジン潤滑油、変速機潤滑油または公知の他の任意の流体を含むことが可能である。機械10内の1つ以上の液圧システムは、タンク34から流体を吸い込み、その流体をタンク34に戻すことが可能である。さらに、液圧システム22を多数の別個の流体タンクに接続し得ることが考えられる。
【0027】
その上、液圧システム22は1つ以上の圧力センサ36、37、38を含む。例えば、ポンプ24の出力圧力Pを監視する圧力センサ36を流体供給通路62に設けてもよい。流体がポンプ24から液圧システム22に通過したときに、流体供給通路62の圧力センサ36は、ポンプ24により供給されて液圧システム22に入る流体の出力圧力Pを監視し、測定された圧力を反映する出力信号を制御装置70に送信する。ポンプ24によって供給される所望の流体圧力を決定するのに適切な任意の位置に、1つまたは複数の圧力センサ36、37、38を配置できる。以下に説明する例示的な較正方法により、圧力センサ36を使用してポンプ24の出力圧力Pが決定される。また、較正方法により、液圧システム22の他の位置で、例えば圧力センサ37、38等の1つまたは複数の圧力センサを使用して圧力Pを決定し得ることが理解される。図2に示したように、圧力センサ37は、油圧シリンダ16の第1のチャンバ50に関連する圧力を監視し、また圧力センサ38は、油圧シリンダ16の第2のチャンバ52に関連する圧力を監視する。当業者は、圧力センサ36、37、38が、ポンプ24によって供給されおよび/または液圧システム22に入る流体の圧力を確認できる任意の圧力センサアセンブリを含み得ることを認識するであろう。さらに、圧力センサ36、37、38の1つまたは複数の位置および数は、図2に示した特定の構造に限定されない。
【0028】
制御装置70は、液圧システム22の動作を制御するための手段を含む単一のマイクロプロセッサまたは複数のマイクロプロセッサとして具体化され得る。制御装置70の機能を実行するように、商業的に入手可能な多数のマイクロプロセッサを構成できる。機械の多数の機能を制御できる機械の一般的なマイクロプロセッサで、制御装置70を容易に具体化し得ることを理解されたい。制御装置70はメモリと、二次記憶装置と、プロセッサと、アプリケーションを動作させるための他の任意のコンポーネントとを含むことが可能である。電源回路、信号調整回路、ソレノイド駆動回路および他のタイプの回路等の他の種々の回路を制御装置70に関連付け得る。制御装置70を少なくとも1つの操作者入力装置68に接続することが可能であり、この操作者入力装置により、操作者が、1つ以上のペダル、スイッチ、ダイヤル、パドル、ジョイスティック等のような公知の1つ以上の制御装置を使用して、液圧システム22の1つ以上の構成部材の動作を制御することが許容される。
【0029】
制御装置70は、圧力センサ36と、ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のアクチュエータ26b、28b、30b、32bとに電気的に結合される。制御装置70は、圧力センサ36から圧力示度を受信し、そして操作者入力装置68から入力を受信するように構成され得る。制御装置70は1つ以上の電気コマンド信号をアクチュエータ26b、28b、30b、32bに送信する。1つまたは複数の電気コマンド信号に応じて、1つ以上のアクチュエータ26b、28b、30b、32bが種々の力を加えて、1つ以上の弁スプール26a、28a、30a、32aを所望の変位位置に制御可能に移動させ、液圧システム22を介した作動油の流れを制御する。
【0030】
操作者入力装置68を使用した操作者入力に応じて、流体圧力により油圧シリンダ16を可動であり得る。流体は、源24によって加圧されて、ヘッド端部供給弁26とロッド端部供給弁30とに向けられることが可能である。ピストンアセンブリ48を伸長または収縮させるための操作者入力に応じて、ヘッド端部供給弁26およびロッド端部供給弁30の一方が開放位置に移動して、加圧流体を第1のチャンバ50および第2のチャンバ52の適切な一方に向けることが可能である。実質的に同時に、ヘッド端部ドレン弁28およびロッド端部ドレン弁32の一方が開放位置に移動して、流体を第1のチャンバ50および第2のチャンバ52の適切な一方からタンク34に向け、ピストンアセンブリ48を移動させるピストン54を隔てた圧力差を発生させることが可能である。例えば、油圧シリンダ16の伸長が要求された場合、ヘッド端部供給弁26が開放位置に移動して、加圧流体を源24から第1のチャンバ50に向けてもよい。加圧流体を第1のチャンバ50に向けるのと実質的に同時に、ロッド端部ドレン弁32が開放位置に移動して、流体を第2のチャンバ52からタンク34に排出することを許容し得る。油圧シリンダ16の収縮が要求された場合、ロッド端部供給弁30が開放位置に移動して、加圧流体を源24から第2のチャンバ52に向けることが可能である。加圧流体を第2のチャンバ52に向けるのと実質的に同時に、ヘッド端部ドレン弁28が開放位置に移動して、流体を第1のチャンバ50からタンク34に排出することを許容し得る。
【0031】
図3は、弁26、28、30、32を制御するための制御装置70の例示的な電流制御システム80を示している。電流制御システム80は、弁26、28、30、32のために、所望のスプール変位を反映するスプール変位コマンド82を受信する。上述したように、例えば、第1のチャンバ50および第2のチャンバ52の一方にまたはそこから向けるための所望量の流体に基づいて、スプール変位コマンド82を決定し得る。
【0032】
電流制御システム80はスプール変位コマンド82をアクチュエータ変換器84に送信する。アクチュエータ変換器84は、スプール変位コマンド82に基づいて定格(または所望の)電流コマンド72を発生させる。次に、電流制御システム80が定格電流コマンド72を修正器86に送信し、この修正器が、定格電流コマンド72に基づいて実際の電流コマンド76を出力する。図3に示した例示的な実施形態では、修正器86は、定格電流コマンド72と較正オフセット電流コマンド74とを合算することによって実際の電流コマンド76を決定する。実際の電流コマンド76は個々の弁26、28、30、32のアクチュエータ26b、28b、30b、32bに送信される。
【0033】
以下に説明するような較正方法によって、それぞれの弁26、28、30、32のために較正オフセット電流コマンド74が決定される。弁26、28、30、32の較正は、較正されている弁を介して流れが開始するポイントを決定するステップを含み、このポイントは一般にクラッキングポイントと呼ばれる。例えば、液圧システム22を組み立てた後に、作業場で周期的に、あるイベントの後等に、1つ以上の弁26、28、30、32の較正を1回または複数回行うことが可能である。例示的な実施形態では、較正オフセット電流コマンド74は、弁26、28、30、32の較正中に決定されるクラッキングポイントの制御装置70からの電流コマンドに基づく。例示的な実施形態では、較正オフセット電流コマンド74は、クラッキングポイント電流コマンド、すなわち、以下に説明する較正方法を用いて決定されたクラッキングポイントにおける電流コマンドから、クラッキングポイントにおいて予期される(または望まれる)電流コマンドを引いたものに等しい。クラッキングポイントにおいて予期される電流コマンドは、個々の弁26、28、30、32を開放するために予期される所定の電流コマンドである。しかし、較正オフセット電流コマンド74が、弁26、28、30、32に関連する他の要因等に依存することも可能であることが理解される。
【0034】
図4は、弁スプール26a、28a、30a、32aの1つの変位と、制御装置70から、関連するアクチュエータ26b、28b、30b、32bへの、図3に示した電流制御システム80を使用して決定される電流コマンドとの間の例示的な関係を示している。定格制御曲線90は、定格電流コマンド72に対する弁スプールの変位を示している。実際の制御曲線92は、実際の電流コマンド76に対する弁スプールの変位を示している。図4に示したように、定格制御曲線90(定格電流コマンド72に対応する)と実際の制御曲線92(実際の電流コマンド76に対応する)との間の差は、較正オフセット電流コマンド74である。
【0035】
図5Aと図5Bは、開示されるいくつかの実施形態に従ってクラッキングポイント電流コマンドを決定することによって液圧システム22を較正する例示的な方法を示したフローチャートを示している。図5Aに示したように、制御装置70は、どの弁26、28、30、32を較正するかを決定し得る(ステップ100)。制御装置70によってあるいは操作者または他の実体によって、弁26、28、30、32を自動的に選択することが可能であり、また選択を示す情報を制御装置70に送信することが可能である。次のステップはヘッド端部供給弁26の較正を示す。また、ヘッド端部ドレン弁28、ロッド端部供給弁30またはロッド端部ドレン弁32の較正時にも、同様のステップが行われることが理解される。
【0036】
制御装置70は、ゼロ電流または実質的にゼロの電流を全ての弁26、28、30、32に供給することによって全ての弁26、28、30、32を閉鎖し得る(ステップ102)。次に、制御装置70は、コマンドをポンプ24に送信して、その出力圧力Pを所定のレベルに上昇させる(ステップ104)。さらに、制御装置70は、ポンプ24から下流に配置されたバイパス弁(図示せず)にコマンドを送信して、ポンプ24からの出力圧力Pを上昇させることが可能である。ポンプ24からの流体は所定の圧力レベルで少なくとも弁部分40(すなわち、較正されている弁を含む弁部分)に供給される。例示的な実施形態では、ポンプ24は流体を両方の弁部分40、42に供給する。
【0037】
次に、制御装置70が、ヘッド端部供給弁26のアクチュエータ26b(すなわち、較正されている弁のアクチュエータ)への電流を増加させ、さらに、実質的に同時に、制御装置70が、ヘッド端部ドレン弁28のアクチュエータ28b(すなわち、較正されている弁と同一の弁部分の反対側の弁のアクチュエータ)に最大電流を向ける(ステップ106)。結果として、アクチュエータ28bへの最大電流により、ヘッド端部ドレン弁28が完全に開放される。制御装置70が、ヘッド端部供給弁26のアクチュエータ26bに向けられる電流を増加させたとき、ポンプ24の出力圧力Pが圧力センサ36によって測定される。圧力センサ36は、測定された出力圧力Pを反映する出力信号を制御装置70に送信する(ステップ108)。
【0038】
さらに、制御装置70は、時間に対するポンプ24の測定された出力圧力Pの導関数dP/dt、すなわち圧力変化率を計算する。制御装置70がヘッド端部供給弁26のアクチュエータ26bへの電流を増加させたとき、ポンプ24の測定された出力圧力Pの導関数dP/dtはゼロであり、同時に、ヘッド端部供給弁26が閉鎖される。ヘッド端部供給弁26が開放して、流れの通過を許容したときに、ポンプ24の出力圧力Pが減少して、ポンプ24の出力圧力Pの導関数dP/dtが急速に変化する。制御装置70は、導関数dP/dtを監視し、そして導関数dP/dtが、所定のしきい値よりも大きく、所定の時間間隔にわたってしきい値を上回っているときを決定する(ステップ110)。例えば、制御装置70は、ポンプ24の測定された出力圧力Pの導関数dP/dtが、所定のしきい値よりも大きく、所定の時間間隔(例えば0.5秒、1秒等)にわたって所定のしきい値を上回り続けているときを決定することが可能である。所定の時間間隔が経過する前に、導関数dP/dtが所定のしきい値以下か、または導関数dP/dtが所定のしきい値を上回り続けない場合(ステップ110;いいえ)、工程はステップ106に戻る。次に、導関数dP/dtが所定の時間間隔にわたって所定のしきい値よりも大きくなるまで、制御装置70は、ヘッド端部供給弁26のアクチュエータ26bへの電流を増加させ続け、またポンプ24の出力圧力Pの導関数dP/dtを計算し続ける(ステップ106〜110)。
【0039】
導関数dP/dtが所定の時間間隔にわたって所定のしきい値よりも大きいことを制御装置70が決定した場合(ステップ110;はい)、制御装置70は、ポンプ24の出力圧力Pの導関数dP/dtが所定のしきい値を上回り始めたときに、すなわち、導関数dP/dtが所定のしきい値を上回り続けている所定の時間間隔の開始時に、ヘッド端部供給弁26のアクチュエータ26bに送信される電流コマンドを決定して記憶する(ステップ112)。次に、図5Bに示したように、制御装置70は、記憶された電流コマンドの数を決定して、所定数の(例えば3つの)電流コマンドが記憶されているかどうかを決定する(ステップ114)。所定数の電流コマンドが記憶されていなかった場合(ステップ114;いいえ)、工程はステップ102に戻り、この結果、制御装置70は、他の電流コマンドを決定して記憶し、次に、所定数の電流コマンドが記憶されているかどうかを決定することが可能である(ステップ102〜114)。
【0040】
所定数の電流コマンドが記憶された後(ステップ114;はい)、制御装置70は、記憶された電流コマンドの平均と、計算された平均からの最大偏差とを計算する。最大偏差は、記憶された所定数の電流コマンドと、計算された平均との間の最大差である。次に、制御装置70は、最大偏差が所定のしきい値よりも小さいかどうかを決定する(ステップ116)。
【0041】
最大偏差が所定のしきい値よりも小さかった場合(ステップ116;はい)、制御装置70は、記憶された電流コマンドの計算された平均から、予期されるクラッキングポイント電流コマンドを引くことによって、ヘッド端部供給弁26用の較正オフセット電流コマンド74を計算する(ステップ118)。制御装置70は、計算された較正オフセット電流コマンド74を記憶し(ステップ120)、次に、ヘッド端部供給弁26の較正が完了する。次に、図5Aと図5Bに示した工程は、ヘッド端部ドレン弁28、ロッド端部供給弁30またはロッド端部ドレン弁32が、較正すべき弁であることを決定する(ステップ100)制御装置70によって繰り返すことが可能である。
【0042】
ステップ116において、最大偏差が所定のしきい値よりも大きかった場合(ステップ116;いいえ)、制御装置70は、クラッキングポイント電流コマンドを決定するための所定の最大数の(例えば8つの)試みに達しているかどうかを決定する(ステップ122)。所定の最大数の試みに達していなかった場合(ステップ122;いいえ)、工程はステップ102に戻り、この結果、制御装置70は、ステップ102〜116を繰り返し、最古のクラッキングポイント電流コマンドを除去し、そして最新のクラッキングポイント電流コマンドで他の最大偏差を計算することによって、他のクラッキングポイント電流コマンドを決定し得る。しかし、所定の最大数の試みに達している場合(ステップ122;はい)、ヘッド端部供給弁26の較正は完了せず、較正オフセット電流コマンド74は、例えば、ゼロであるか、または以前に決定された較正オフセット電流コマンドであり得る。その後、クラッキングポイント電流コマンドを決定しまた較正オフセット電流コマンド74を計算するために、工程はステップ102に戻ることが可能である。
【産業上の利用可能性】
【0043】
開示される較正方法は、アクチュエータに供給される流体の圧力および/または流れの均衡が望まれる流体アクチュエータを制御するためのIMVの構造等の任意の弁構造に適用でき得る。開示される較正方法は、低コストの簡単な構成で一貫したアクチュエータ性能を提供することが可能であり、また弁構造の弁の正確な位置決めを実現することが可能である。
【0044】
ヘッド端部供給弁26、ヘッド端部ドレン弁28、ロッド端部供給弁30およびロッド端部ドレン弁32のいずれかを較正する方法は、クラッキングポイント電流コマンド、すなわち、較正されている弁が流体の通過を許容し始める電流コマンドを決定するステップを含む。例示的な実施形態では、較正オフセット電流コマンド74は、クラッキングポイントにおいて予期される電流コマンドを引いたクラッキングポイント電流コマンドである。実際の電流コマンド76を決定するために、較正オフセット電流コマンド74が定格電流コマンド72に加えられる。したがって、開示される例示的な較正方法を用いて決定されたクラッキングポイント電流コマンドに基づき、実際の弁の動作を予測し得る。実際の電流コマンド76は、個々の弁26、28、30、32を制御するために制御装置70から弁26、28、30、32のアクチュエータ26b、28b、30b、32bに送信され、定格電流コマンド72と較正オフセット電流コマンド74とを合算することによって決定される。
【0045】
定格制御曲線90をシフトするために、較正オフセット電流コマンド74が用いられ、この結果、弁26、28、30、32の性能が実際の制御曲線92になる。このシフトは、例えば、個別の構成部材の構造および/または組立の変化により、定格の(または所望の)弁の位置と比較した実際の弁の動作の変化を補償する。
【0046】
ヘッド端部供給弁26の較正中、ポンプ出力圧力Pが所定のレベルに上昇したとき、最初に、ゼロ電流が弁26、28、30、32のアクチュエータ26b、28b、30b、32bに印加される。結果として、流体が弁26、28、30、32に流れ始める。電流がヘッド端部供給弁26のアクチュエータ26bに印加され、アクチュエータ26bに印加された電流がゼロから上昇し、一方、所定のレベルの最大電流がヘッド端部ドレン弁28のアクチュエータ28bに印加される。それに対して、ポンプ出力圧力Pが監視される。弁26、28、30、32の較正中にポンプ出力圧力Pが監視されるので、ポンプ24の出口の近傍に配置された単一の圧力センサ36によって、弁26、28、30、32毎の較正を行うことが可能である。したがって、より少数の圧力センサで済ませることが可能であり、これにより、弁較正方法が簡単になり、複数の圧力センサを使用した場合に生じることがある偏差が低減される。
【0047】
ポンプ出力圧力Pの導関数dP/dtが計算されて、所定のしきい値と比較される。導関数dP/dtが所定の時間間隔にわたって所定のしきい値を上回っている場合、時間間隔の開始時にアクチュエータ26bに印加される電流コマンドが決定されて記憶される。所定の時間間隔にわたって所定のしきい値よりも大きくなる導関数dP/dtの条件を適用することによって、弁26、28、30、32が開放しているときのより正確な判定を決定することが可能である。
【0048】
所定の弁26、28、30、32用の較正を複数回行うことが可能であり、それぞれの回で、最大偏差が計算される。最大偏差が所定のしきい値を下回ったとき、所定の弁26、28、30、32の較正は有効であると考えられ、対応する較正オフセット電流コマンド74が記憶される。結果として、圧力スパイク等の圧力過渡現象および圧力センサノイズが、無効な較正を生じさせることを防止することが可能である。したがって、状態が必ずしも厳しく制御されるとは限らない音場較正に対して、圧力に基づく較正はより一貫しており適切に正確であり得る。
【0049】
IMVを較正するための方法に種々の修正および変更をなし得ることが当業者には明らかであろう。他の実施形態は、IMVを較正するための開示される方法の仕様および実施を考慮すれば当業者には明らかであろう。仕様および実施例は例示的なものに過ぎないと考えるべきであり、真の範囲は、次の特許請求の範囲およびそれらの等価物によって示されることが意図される。
【特許請求の範囲】
【請求項1】
流れ遮断位置と流れ通過位置との間で可動な弁体(26a、28a、30a、32a)を有する弁(26、28、30、32)を較正するための方法であって、
弁に向けられた流体を加圧するステップと、
弁体の位置を制御するための弁に向けられた電流を増加させるステップと、
流体圧力を検出するステップと、
検出された流体圧力の時間導関数が所定の時間間隔にわたって所定のしきい値よりも大きいかどうかを決定するステップと、
弁に向けられるクラッキングポイント電流コマンドを決定するステップであって、検出された流体圧力の時間導関数が所定のしきい値よりも大きい場合に、クラッキングポイント電流コマンドが弁に向けられるステップと、
を含む方法。
【請求項2】
予期されるクラッキングポイント電流コマンドと、決定されたクラッキングポイント電流コマンドとの間の差に基づいて、較正オフセット電流コマンド(74)を決定するステップをさらに含む請求項1に記載の方法。
【請求項3】
決定された較正オフセット電流コマンドと定格電流コマンド(72)とに基づいて、弁に向けるための実際の電流コマンド(76)を決定するステップをさらに含む請求項2に記載の方法。
【請求項4】
実際の電流コマンドが、決定された較正オフセット電流コマンドと定格電流コマンドとの合算に基づく請求項3に記載の方法。
【請求項5】
定格電流コマンドが弁体の所望の位置に基づく請求項4に記載の方法。
【請求項6】
流体が源(24)で加圧され、
流体圧力が源の出口で検出される
請求項1に記載の方法。
【請求項7】
検出された流体圧力の時間導関数が所定のしきい値を上回り始めたときに、決定されたクラッキングポイント電流コマンドが弁に向けられる請求項1に記載の方法。
【請求項8】
弁が第1の弁(26、30)および第2の弁(28、32)の一方であり、
第1の弁がアクチュエータ(16)のチャンバ(50、52)への流体の流れを制御するように構成され、
第2の弁がアクチュエータのチャンバからの流体の流れを制御するように構成される
請求項1に記載の方法。
【請求項9】
流れ遮断位置と流れ通過位置との間で可動な弁体(26a、28a、30a、32a)を有する弁(26、28、30、32)を較正するためのシステムであって、
流体を加圧するように構成された源(24)と、
源の出口で流体圧力を検出するように構成された圧力センサ(36)と、
圧力センサに接続された制御装置(70)であって、
弁体の位置を制御するための弁に向けられた電流を増加させ、
圧力センサから、検出された流体圧力を受け入れ、
源の出口で測定された流体圧力に基づいて、弁が流れ通過位置にあるかどうかを決定し、
弁が流れ通過位置にあった場合、弁に向けられるクラッキングポイント電流コマンドを決定する
ように構成される制御装置(70)と、
を備えるシステム。
【請求項10】
検出された流体圧力の時間導関数が所定の時間間隔にわたって所定のしきい値よりも大きいかどうかを決定するように、制御装置がさらに構成され、検出された流体圧力の時間導関数が所定のしきい値を上回り始めたときに、決定されたクラッキングポイント電流コマンドが弁に向けられる請求項9に記載のシステム。
【請求項1】
流れ遮断位置と流れ通過位置との間で可動な弁体(26a、28a、30a、32a)を有する弁(26、28、30、32)を較正するための方法であって、
弁に向けられた流体を加圧するステップと、
弁体の位置を制御するための弁に向けられた電流を増加させるステップと、
流体圧力を検出するステップと、
検出された流体圧力の時間導関数が所定の時間間隔にわたって所定のしきい値よりも大きいかどうかを決定するステップと、
弁に向けられるクラッキングポイント電流コマンドを決定するステップであって、検出された流体圧力の時間導関数が所定のしきい値よりも大きい場合に、クラッキングポイント電流コマンドが弁に向けられるステップと、
を含む方法。
【請求項2】
予期されるクラッキングポイント電流コマンドと、決定されたクラッキングポイント電流コマンドとの間の差に基づいて、較正オフセット電流コマンド(74)を決定するステップをさらに含む請求項1に記載の方法。
【請求項3】
決定された較正オフセット電流コマンドと定格電流コマンド(72)とに基づいて、弁に向けるための実際の電流コマンド(76)を決定するステップをさらに含む請求項2に記載の方法。
【請求項4】
実際の電流コマンドが、決定された較正オフセット電流コマンドと定格電流コマンドとの合算に基づく請求項3に記載の方法。
【請求項5】
定格電流コマンドが弁体の所望の位置に基づく請求項4に記載の方法。
【請求項6】
流体が源(24)で加圧され、
流体圧力が源の出口で検出される
請求項1に記載の方法。
【請求項7】
検出された流体圧力の時間導関数が所定のしきい値を上回り始めたときに、決定されたクラッキングポイント電流コマンドが弁に向けられる請求項1に記載の方法。
【請求項8】
弁が第1の弁(26、30)および第2の弁(28、32)の一方であり、
第1の弁がアクチュエータ(16)のチャンバ(50、52)への流体の流れを制御するように構成され、
第2の弁がアクチュエータのチャンバからの流体の流れを制御するように構成される
請求項1に記載の方法。
【請求項9】
流れ遮断位置と流れ通過位置との間で可動な弁体(26a、28a、30a、32a)を有する弁(26、28、30、32)を較正するためのシステムであって、
流体を加圧するように構成された源(24)と、
源の出口で流体圧力を検出するように構成された圧力センサ(36)と、
圧力センサに接続された制御装置(70)であって、
弁体の位置を制御するための弁に向けられた電流を増加させ、
圧力センサから、検出された流体圧力を受け入れ、
源の出口で測定された流体圧力に基づいて、弁が流れ通過位置にあるかどうかを決定し、
弁が流れ通過位置にあった場合、弁に向けられるクラッキングポイント電流コマンドを決定する
ように構成される制御装置(70)と、
を備えるシステム。
【請求項10】
検出された流体圧力の時間導関数が所定の時間間隔にわたって所定のしきい値よりも大きいかどうかを決定するように、制御装置がさらに構成され、検出された流体圧力の時間導関数が所定のしきい値を上回り始めたときに、決定されたクラッキングポイント電流コマンドが弁に向けられる請求項9に記載のシステム。
【図1】

【図2】
【図3】
【図4】
【図5A】
【図5B】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【公表番号】特表2010−502948(P2010−502948A)
【公表日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2009−526605(P2009−526605)
【出願日】平成19年8月8日(2007.8.8)
【国際出願番号】PCT/US2007/017655
【国際公開番号】WO2008/027169
【国際公開日】平成20年3月6日(2008.3.6)
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【出願人】(000190297)キャタピラージャパン株式会社 (1,189)
【Fターム(参考)】
【公表日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成19年8月8日(2007.8.8)
【国際出願番号】PCT/US2007/017655
【国際公開番号】WO2008/027169
【国際公開日】平成20年3月6日(2008.3.6)
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【出願人】(000190297)キャタピラージャパン株式会社 (1,189)
【Fターム(参考)】
[ Back to top ]