
獣類捕獲装置
【課題】 一度に複数頭の獣類を捕獲することができる獣類捕獲装置を提供する。
【解決手段】
獣類捕獲装置1は、複数の柵ユニット10〜10と、複数の扉ユニット11,11と、各ユニットを連結する連結コイルと、センサ12,12と、制御部と、を備える。各ユニットは横方向に並べて配設され、連結コイルによって連結されることで、捕獲空間を形成する。センサ12,12は扉ユニット11,11から獣類捕獲装置1内への獣類の進入及び退出を検知する。制御部は、センサ12,12による検知に基づいて、獣類捕獲装置1内の獣類の頭数を検知し、当該頭数に基づいて、扉ユニット11,11を閉鎖する。
【解決手段】
獣類捕獲装置1は、複数の柵ユニット10〜10と、複数の扉ユニット11,11と、各ユニットを連結する連結コイルと、センサ12,12と、制御部と、を備える。各ユニットは横方向に並べて配設され、連結コイルによって連結されることで、捕獲空間を形成する。センサ12,12は扉ユニット11,11から獣類捕獲装置1内への獣類の進入及び退出を検知する。制御部は、センサ12,12による検知に基づいて、獣類捕獲装置1内の獣類の頭数を検知し、当該頭数に基づいて、扉ユニット11,11を閉鎖する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、野山に生息する害獣等の獣類を捕獲するために用いる獣類捕獲装置に関する。
【背景技術】
【0002】
従来、野山に生息する有害鳥獣を捕獲する手段として、種々の罠又は捕獲装置が開発、開示されている。特許文献1では、隣接する複数の面それぞれに扉部を有しており、感知部が獣類の進入を感知すると、複数の前記扉部を同時に閉鎖するよう構成される獣類の捕獲装置が開示されている。これによれば、隣接する面それぞれに扉部を有しており、捕獲装置は開放されているため、捕獲装置に対する獣類の警戒心を和らげることができ、容易に獣類を捕獲装置内部に誘い入れることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−300847号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来の獣類の捕獲装置では、装置内部に進入した獣類がたとえ1頭であったとしても、感知部が獣類の進入を感知すると、複数の扉部全てを閉鎖してしまうため、一度に複数頭の獣類を捕獲することが困難であるという問題がある。
【0005】
本発明は斯かる事情に鑑みてなされたものであり、その主たる目的は、上記課題を解決することができる獣類捕獲装置を提供することにある。
【課題を解決するための手段】
【0006】
上述の課題を解決するために、本発明の一の態様の獣類捕獲装置は、獣類を捕獲するための捕獲空間を具備する檻部と、前記捕獲空間への獣類の入出が可能なように前記檻部の側面に設けられる複数の開口部と、前記捕獲空間内の獣類の頭数を検知する、頭数検知手段と、前記頭数検知手段により検知される獣類の頭数が、予め設定される捕獲目標頭数以上となった場合に、前記捕獲空間内の獣類を捕獲する獣類捕獲手段と、を備える。
【0007】
この態様において、前記頭数検知手段は、前記複数の開口部それぞれからの、前記捕獲空間への獣類の入出を検知することで、前記捕獲空間内の獣類の頭数を検知するように構成されていてもよい。
【0008】
この態様において、前記頭数検知手段が前記捕獲空間への獣類の入出を検知したとき、少なくとも当該獣類が進入したか退出したかを示す情報を含む入出情報を記録する記録部をさらに備えていてもよい。
【0009】
この態様において、前記頭数検知手段により検知される獣類の頭数に基づいて、前記獣類捕獲手段により、前記捕獲空間内の獣類の捕獲を行う、第1の動作モードと、前記獣類捕獲手段による前記捕獲空間内の獣類の捕獲を行わずに、前記記録部への入出情報の記録を行う、第2の動作モードと、を選択的に実行可能なように構成されていてもよい。
【0010】
この態様において、前記獣類捕獲手段は、前記複数の開口部を閉鎖することで、前記捕獲空間内の獣類を捕獲するように構成されていてもよい。
【0011】
この態様において、前記檻部は、複数の側面ユニットと、複数の連結部材と、を有し、前記複数の側面ユニットが、前記連結部材を用いて互いに連結自在に構成されており、前記複数の側面ユニットが一定の領域を囲むように横方向に並べられ、隣り合う前記側面ユニット同士が前記連結部材を用いて連結されることにより、前記捕獲空間を形成するよう構成されていてもよい。
【発明の効果】
【0012】
本発明に係る獣類捕獲装置によれば、一度に複数頭の獣類を捕獲することができる。
【図面の簡単な説明】
【0013】
【図1】獣類捕獲装置の構成を示す斜視図。
【図2】柵ユニットの構成を示す正面図。
【図3】柵ユニットの構成を示す側面図。
【図4】扉ユニットの構成を示す正面図。
【図5】扉ユニットの構成を示す側面図。
【図6】柵部の構成を示す正面図。
【図7】柵部の構成を示す側面図。
【図8】ガイド枠部の構成を示す正面図。
【図9】落とし扉の構成を示す正面図。
【図10】センサの構成を示す模式図。
【図11】制御部の構成を示すブロック図。
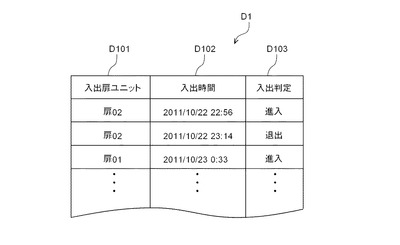
【図12】履歴テーブルの一例を示す模式図。
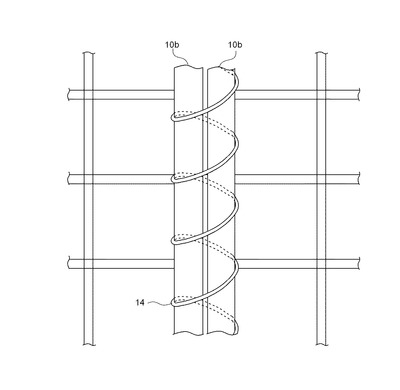
【図13】連結コイルによる連結方法を示す模式図。
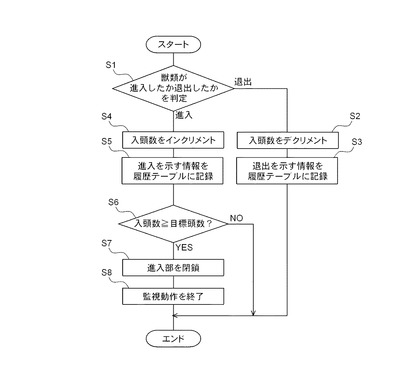
【図14】獣類捕獲装置の監視動作中における入頭数カウント処理のフローチャート。
【発明を実施するための形態】
【0014】
以下、本発明の好ましい実施の形態を、図面を参照しながら説明する。
【0015】
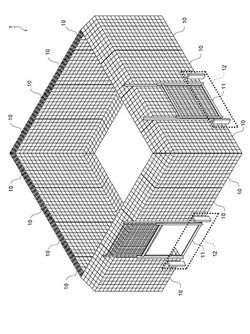
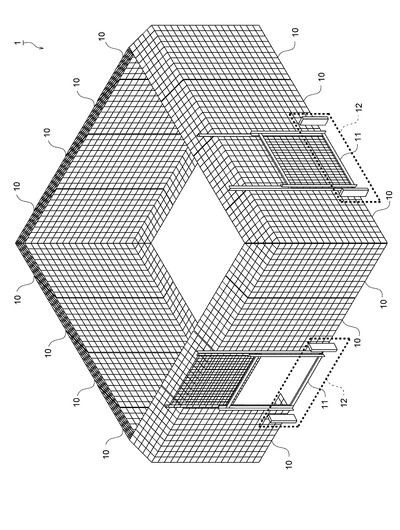
図1は、本実施の形態に係る獣類捕獲装置1の構成を示す斜視図である。図1に示すように獣類捕獲装置1は、横方向に並べて配設され、獣類捕獲装置1の側面部を構成する14枚の柵ユニット10〜10及び2枚の扉ユニット11,11を備える。これらのユニットは、平面視で全体が矩形となるように配設される。なお、扉ユニット11,11は、図1に示すように、隣接する別の面にそれぞれ配設される。隣接するユニット同士は、当該ユニットの側縁部に連結コイル(図示せず)を巻き付けることで連結される。ここで、獣類捕獲装置1は上部を封鎖する天井部材等は備えておらず、獣類捕獲装置1の上方は開放されている。
【0016】
また、獣類捕獲装置1は、扉ユニット11,11から獣類捕獲装置1内部への獣類の進入を赤外線により検知する2組のセンサ12,12と、センサ12,12の検知に基づいて扉ユニット11,11を閉鎖させる制御部(図示せず)と、を備える。なお、制御部の詳しい構成については後述する。
【0017】
次に、各ユニットの構成について説明する。なお、以下の説明において、各ユニットを配設し、獣類捕獲装置1を組み立てたときに、各ユニットにおいて獣類捕獲装置1の外側を向く面をユニットの前面、獣類捕獲装置1の内側を向く面をユニットの後面と定義する。また、各ユニットを配設し、獣類捕獲装置1を組み立てたときに、各ユニットにおいて、地面と接する側をユニットの下側、それとは反対側をユニットの上側と定義する。
【0018】
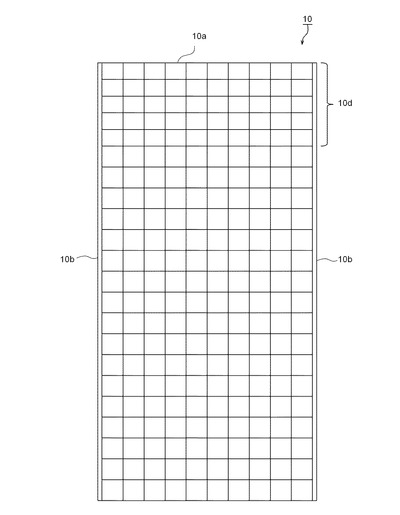
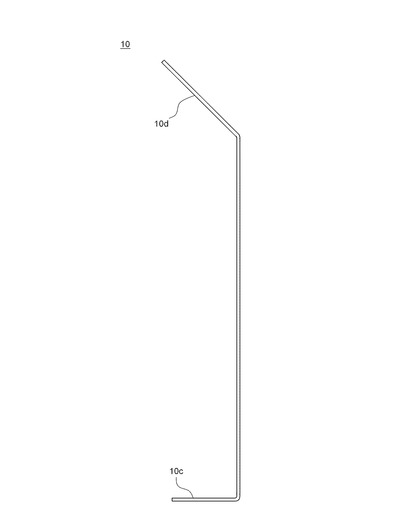
柵ユニット10の構成について説明する。図2は柵ユニット10の構成を示す正面図、図3は柵ユニット10の構成を示す側面図である。柵ユニット10は、直径6mmの鉄線が等間隔になるよう縦横に直角に配設され、配設された鉄線の各交点が溶接された溶接金網10aと、溶接金網10aを挟むように配設され、溶接金網10aに溶接される直径10mmの連結鉄筋線10b,10bと、を備えるパネル状ユニットである。溶接金網10aの大きさは、横1000mm、縦2500mmである。連結鉄筋線11b,11bの長さは、2500mmであり、溶接金網10aの長辺側両端に沿って溶接される。柵ユニット10の下部は、下端から300mmの位置でユニットの後面に向かって直角に屈曲しており、屈曲部10cを構成する。また、柵ユニット10の上部は、上端から500mmの位置でユニットの後面に向かって45°傾斜しており、傾斜部10dを構成する。
【0019】
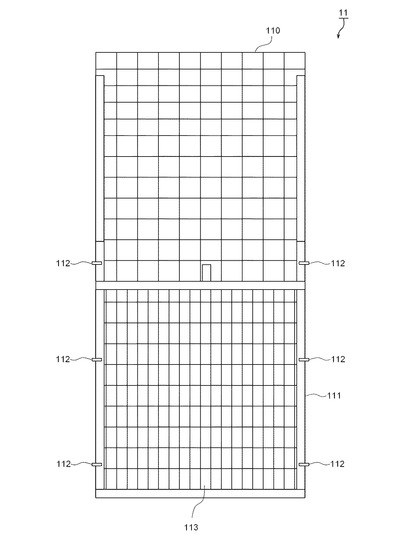
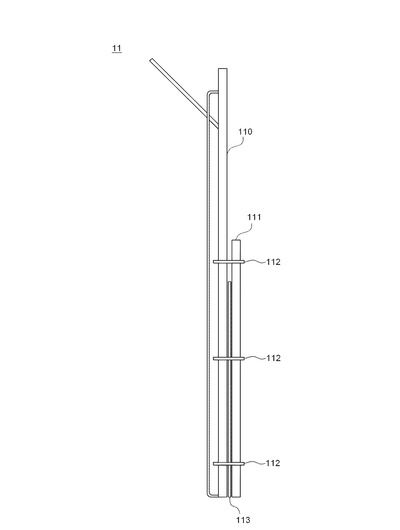
扉ユニット11の構成について説明する。図4は扉ユニット11の構成を示す正面図、図5は扉ユニット11の構成を示す側面図である。扉ユニット11は柵ユニット10の下部を開口し、当該開口した部分を開閉可能なように扉を取り付けたユニットであって、柵を構成する柵部110と、柵部110と連結することによって、柵部110との間に扉のガイドを構成するガイド枠部111と、柵部110とガイド枠部111とを連結する6つのブラケット112〜112と、連結された柵部110及びガイド枠部111に沿って昇降することが可能な落とし扉113と、を備える。
【0020】
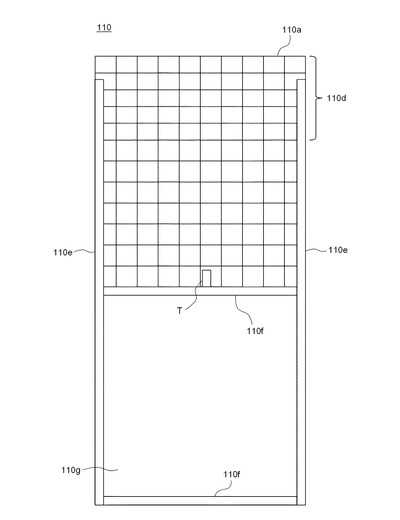
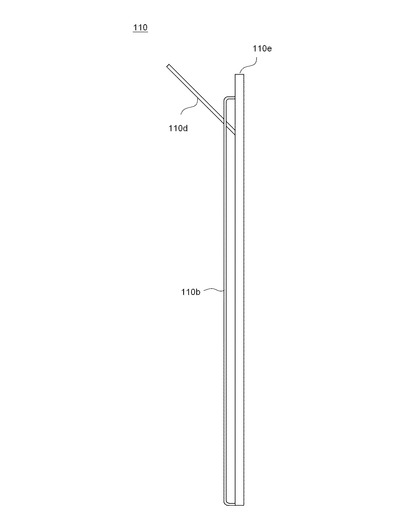
図6は柵部110の構成を示す正面図、図7は柵部110の構成を示す側面図である。柵部110は、直径6mmの鉄線が等間隔になるよう縦横に直角に配設され、配設された鉄線の各交点が溶接された溶接金網110aと、直径10mmの連結鉄筋線110b,110bと、溶接金網110a及び連結鉄筋線110b,110bが溶接される枠組となる縦アングル110e,110e及び横アングル110f,110fと、落とし扉113を昇降するための開閉トリガTと、を有する。縦アングル110eのサイズはL3×40×40×2000であり、横アングル110fのサイズはL3×40×40×1000である。横アングル110f,110fは、縦アングル110e,110eの中間部分及び下端のそれぞれに溶接される。これにより、縦アングル110e,110e及び横アングル110f,110fは、柵部110の枠組となる。
【0021】
溶接金網110aの大きさは、縦1200mm、横1000mmであり、柵部110の枠組の上部に溶接される。ここで、枠組に溶接されるのは、溶接金網110aの下部700mmのみであり、溶接金網110aの上部500mmは、枠組と溶接されず、ユニットの後面に向かって45°傾斜した傾斜部110dを構成する。柵部110の下部は開口しており、捕獲対象となる獣類が侵入するための進入部110gを構成する。また、連結鉄筋線110b,110bは、縦アングル110e,110eそれぞれに溶接される。また、縦アングル110e,110eの中間部分に溶接された横アングル110fには、開閉トリガTが配設される。
【0022】
開閉トリガTは、プル型ソレノイドを備える。プル型ソレノイドは、プランジャと呼ばれる可動鉄棒を有しており、初期の状態ではプランジャは突出しているが、プル型ソレノイドに電流が流れると、プランジャはプル型ソレノイド内部に吸引される。本実施の形態では、開閉トリガTは、初期の状態ではプル型ソレノイドの突出したプランジャが落とし扉113を保持し、プル型ソレノイドに電流が流れた場合に、落とし扉113を保持しているプランジャがプル型ソレノイド内部に吸引され、落とし扉113が落下するように構成されている。
【0023】
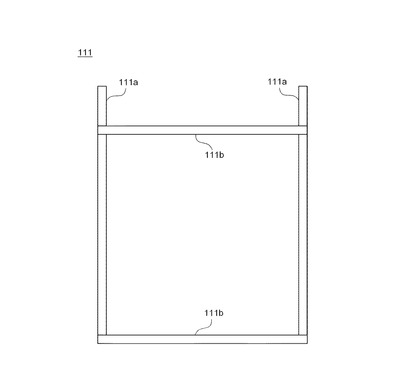
図8はガイド枠部111の構成を示す正面図である。ガイド枠部111は、縦アングル111a,111a及び横アングル111b,111bを有する。縦アングル111aのサイズは、L5×40×40×1200mmであり、横アングル111bのサイズは、L5×40×40×1000mmである。ここで、横アングル111b,111bは、縦アングル111a,111aの上端から200mmの位置及び下端のそれぞれに溶接される。
【0024】
ガイド枠部111は、柵部110の進入部110gの前面に配設され、ガイド枠部111と柵部110とは、ブラケット112により連結される。このとき、ガイド枠部111と柵部110とは、約20mm程度の間隙を空けて連結される。この間隙は落とし扉113のガイドとして機能する。
【0025】
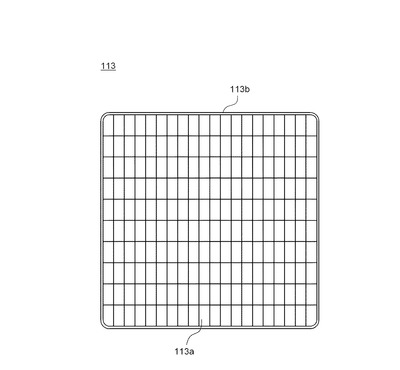
図9は落とし扉113の構成を示す正面図である。落とし扉113は、直径6mmの鉄線が等間隔になるよう縦横に直角に配設され、配設された鉄線の各交点が溶接された溶接金網113aと、溶接金網113aを補強する直径10mmの鉄筋線113bと、を有する。溶接金網113aの大きさは、縦1010mm、横1000mmである。鉄筋線113bは、溶接金網113aの四辺を取り囲むようにして、溶接金網113aに溶接される。落とし扉113は、柵部110及びガイド枠部111それぞれの縦アングルに沿って昇降可能なように、柵部110とガイド枠部111との間に設けられた間隙に配設される。
【0026】
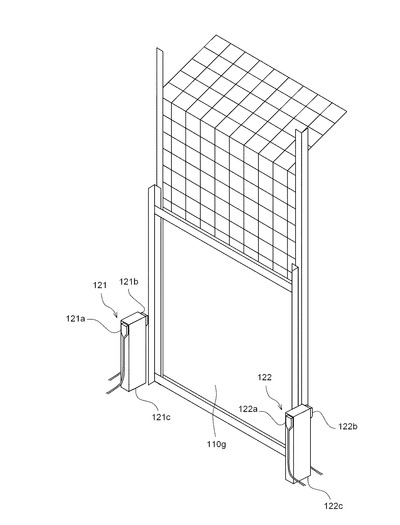
図10はセンサ12の構成を示す模式図である。センサ12は、赤外線遮断式センサであり、赤外線投光器121と、赤外線受光器122と、を備える。赤外線投光器121は、2つの投光部121a,121bと、投光部121a,121bを支持する支持部121cと、を有する。赤外線受光器122は、2つの受光部122a,122bと、受光部122a,122bを支持する支持部122cと、を有する。図10に示すように、赤外線投光器121と赤外線受光器122とは進入部110gの前面に、進入部110gを挟むように、且つ投光部121aと受光部122aとが対向し、投光部121bと受光部122bとが対向するように配設される。投光部121a,121bは、赤外線を放射し、受光部122a,122bは、投光部121a,121bそれぞれから放射される赤外線を受光するように構成されている。さらに、受光部122a,122bは、投光部121a,121bからの赤外線を受光できなかった場合に、信号を発信するように構成されている。ここで、獣類が進入部110gを通過し獣類捕獲装置1内に進入又は退出するとき、赤外線投光器121及び赤外線受光器122の間を通過するため、獣類が投光部121a,121bと受光部122a,122bとの間を遮断し、受光部122a,122bは、投光部からの赤外線を受光できなくなる。これにより、受光部122a,122bは、獣類の通過に基づいて信号を発信する。なお、本実施の形態では、図10に示すように、投光部121b及び受光部122bは、進入部110gの近傍に配置され、投光部121a及び受光部122aは、投光部121b及び受光部122bよりも進入部110gから離れた位置に配置される。
【0027】
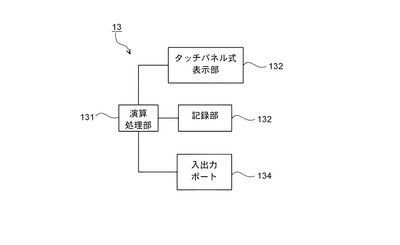
図11は、制御部13の構成を示すブロック図である。制御部13は、獣類捕獲装置1の捕獲動作を制御するための制御装置であって、演算処理部131と、タッチパネル式表示部132と、記録部133と、入出力ポート134と、を有している。演算処理部131は、タッチパネル式表示部132、記録部133、及び入出力ポート134それぞれと接続されており、タッチパネル式表示部132、記録部133、及び入出力ポート134それぞれとデータ又は信号等をやりとりすることが可能なように構成されている。タッチパネル式表示部132は、入力部及び表示部を兼ねた入出力インタフェースであり、獣類捕獲装置1を使用する使用者がタッチパネル式表示部132を操作することで、獣類捕獲装置1の動作条件等を設定することができる。記録部133は、獣類の獣類捕獲装置1内への進入及び退出の検知履歴を記録する履歴テーブルを格納する記録領域を有している。図12は、履歴テーブルD1の一例を示す模式図である。履歴テーブルD1には、獣類の進入又は退出した扉ユニットを示す入出扉ユニット情報D101と、獣類の進入又は退出を検知した日時を示す入出時間情報D102と、獣類が進入したか退出したかを示す入出判定情報D103と、を要素として含んでいる。ここで、制御部13は、タッチパネル式表示部132に、履歴テーブルD1に記録された情報を表示することができる。これにより、使用者は、タッチパネル式表示部132を操作することで、履歴テーブルD1に記録された情報を閲覧することができる。入出力ポート134は、受光部122a,122bからの信号を受信できるように、センサ12,12と接続されている。これにより、演算処理部131は、入出力ポート134を介してセンサ12,12から発信される信号を受信し、当該信号に基づいて、獣類の獣類捕獲装置1内への進入及び退出を判定する。具体的な判定方法を以下に説明する。
【0028】
制御部13の演算処理部131による獣類の進入及び退出の判定方法について、具体的な動作を説明する。本実施の形態では、上述のように、投光部121b及び受光部122bは、進入部110gの近傍に配置され、投光部121a及び受光部122aは、投光部121b及び受光部122bよりも進入部110gから離れた位置に配置されている。このため、獣類が進入部110gから獣類捕獲装置1内部に進入する場合、獣類は、まず投光部121a及び受光部122aの間を通過し、その後、投光部121b及び受光部122bの間を通過する。よって、獣類が獣類捕獲装置1内部に進入する場合は、まず受光部122aが信号を発信し、次に受光部122bが信号を発信する。逆に、獣類が進入部110gから獣類捕獲装置1外部に退出する場合、獣類は、まず投光部121b及び受光部122bの間を通過し、その後、投光部121a及び受光部122aの間を通過する。よって、獣類が獣類捕獲装置1外部に退出する場合は、まず受光部122bが信号を発信し、次に受光部122aが信号を発信する。このため、演算処理部131は、まず受光部122aから信号を受信し、次に受光部122bから信号を受信した場合は、獣類が獣類捕獲装置1内部に進入したと判定する。逆に、まず受光部122bから信号を受信し、次に受光部122aから信号を受信した場合は、獣類が獣類捕獲装置1外部に退出したと判定する。
【0029】
また、入出力ポート134は開閉トリガT,Tと電気的に接続されており、演算処理部131からの信号に基づいて、開閉トリガT,Tそれぞれに電流を流し、開閉トリガT,Tそれぞれを動作させることができる。
【0030】
本実施の形態では、扉ユニット11,11は2つ備えられている。このため、進入部110gも、扉ユニット11と同様に2つ設けられる。このように複数の進入部を設けることで、それぞれの進入部から獣類を獣類捕獲装置1内に誘い入れることができ、効率的に獣類を捕獲することができる。
【0031】
また、本実施の形態では、扉ユニット11,11は、隣接する別の面にそれぞれ配設されている。このため、扉ユニット11,11それぞれの進入部110g,110gは、それぞれ別の方向を向く。これにより、複数の方向から獣類を獣類捕獲装置1内に誘い入れることができ、効率的に獣類を捕獲することができる。
【0032】
また、本実施の形態では、複数の柵ユニット10及び複数の扉ユニット11を連結することで、獣類捕獲装置1を構成している。このため、任意の数のユニットを自在に連結することが可能であり、柵ユニット10又は扉ユニット11の数を増減することで、獣類捕獲装置1のサイズ又は形状を容易に変更することができる。さらに、獣類捕獲装置1は自在に分解可能な複数のユニットを有するため、ユニット毎に分解することで、装置自体を容易に移動させることができる。
【0033】
また、本実施の形態では、柵ユニット10及び扉ユニット11の上部にユニットの後面に向かって傾斜する傾斜部が設けられており、この傾斜部が獣返しとして働くため、上方を封鎖するための天井部材等を備えずとも、獣類捕獲装置1内に捕獲された獣類がユニットを飛び越えて、獣類捕獲装置1から脱出するのを防ぐことができる。これにより、獣類捕獲装置1の上部に、別途、捕獲された獣類の脱出を防ぐための天部材等を設ける必要がなく、装置を軽量化することができる。さらに、上部に別途、天部材等を設ける必要がないために、当該天部材等にサイズ及び形状が依存することがなく、獣類捕獲装置1のサイズ又は形状を容易に変更することができる。
【0034】
また、本実施の形態では、柵ユニット10の下部にはユニットの後面に向かって屈曲した屈曲部10cが設けられており、この屈曲部10cが、獣類捕獲装置1内に捕獲された獣類が穴を掘り、獣類捕獲装置1から脱出するのを防ぐ。これにより、獣類捕獲装置1の底部に、別途、獣類の脱出を防ぐための底部材等を設ける必要がなく、装置を軽量化することができる。さらに、底部に別途、底部材等を設ける必要がないために、当該底部材等にサイズ及び形状が依存することがなく、獣類捕獲装置1のサイズ又は形状を容易に変更することができる。
【0035】
上記のような構成の獣類捕獲装置1の使用方法について、以下に説明する。
まず、各ユニットの連結方法について説明する。獣類捕獲装置1を設置する設置者は、隣接する柵ユニット10,10それぞれの連結鉄筋線10b,10bに各ユニットを連結するための連結部材である連結コイル14を巻き付ける。これにより、連結鉄筋線10b,10bが結束され、当該柵ユニット10,10が連結される(図13を参照)。また、設置者は、隣接する柵ユニット10及び扉ユニット11についても、同様にしてそれぞれの連結鉄筋線10b,110bに連結コイル14を巻き付ける。これにより、連結鉄筋線10b,110bが結束され、当該柵ユニット10及び扉ユニット11が連結される。
【0036】
このように、本実施の形態では、各ユニットは、連結鉄筋線を連結部材で結束することにより連結される。このため、容易に且つ短時間で組み立てたり、分解したりすることができる。
【0037】
また、本実施の形態では、各側縁部は、連結部材により結束されているだけであるため、従来用いられているボルト止め又は通し部材等による連結のように堅固なものではなく、ある程度の弾力を有する弾性的な連結となる。このように、隣接する各ユニットそれぞれの側縁部は弾性的に連結されるため、獣類捕獲装置1全体は軟構造となる。これにより、獣類捕獲装置1内に捕獲された獣類が、獣類捕獲装置1内から脱出するために暴れ、側面部に衝撃が加わったとしても、各ユニットの連結箇所で当該衝撃を吸収することができ、獣類捕獲装置1の大きな変形や破損等を防ぐことができる。
【0038】
また、従来用いられているボルト止め又は通し部材等の連結部材による連結の場合、堅固に各構成部材を連結するために、構成部材に強い衝撃が加わる等によって周縁部が変形すると、それに伴って連結部材も変形してしまい、解体が困難となってしまう。一方、本実施の形態では、連結部材は連結鉄筋線を結束しているだけであるため、連結鉄筋線に変形が生じた場合であっても、連結部材は当該変形に対応して回転等の移動をすることが可能である。これにより、連結鉄筋線が変形した場合でも、連結部材が大きく変形することを防ぐことができる。また、たとえ連結部材が大きく変形してしまった場合であっても、当該連結部材は連結鉄筋線を結束するように連結鉄筋線に巻き付けられているだけであるため、容易に取り外すことができる。
【0039】
次に、獣類捕獲装置1の固定方法について説明する。設置者は、柵ユニット10の屈曲部10cにペグを打ち込むことにより、当該柵ユニット10を地面に固定する。また、このように全ての柵ユニット10〜10を地面に固定することで、上述のようにして柵ユニット10と連結された扉ユニット11も固定される。
【0040】
次に、上記のようにして設置した獣類捕獲装置1の動作について説明する。
まず、獣類捕獲装置1を使用する使用者は、制御部13の電源を入れ、制御部13を起動させる。制御部13が起動すると、使用者は、動作準備として、タッチパネル式表示部132を操作し、監視動作を開始する動作開始時間、監視動作を終了する動作終了時間、及び捕獲目標となる目標頭数を設定する。なお、本実施の形態では、獣類捕獲装置1は、捕獲動作モード及び監視動作モードの2つの動作モードを有しており、上記の動作準備において、目標頭数を1以上に設定した場合、捕獲動作モードが実行される。他方、目標頭数を0と設定した場合、監視動作モードが実行される。これらの動作モードにおける具体的な動作を以下に説明する。
【0041】
まず、捕獲動作モードにおける獣類捕獲装置1の動作について説明する。
上述の動作準備が完了した後、動作開始時間に達すると、制御部13の演算処理部131は自動的に監視動作を開始する。ここで、演算処理部131は、監視動作の開始時に獣類捕獲装置1内の獣類の数を示す入頭数を0に設定する。監視動作中に演算処理部131が入出力ポート134を介して、センサ12,12からの信号を受信すると、演算処理部131は入頭数カウント処理を行う。図14は、演算処理部131が行う入頭数カウント処理のフローチャートである。演算処理部131がセンサ12からの信号を受信すると、演算処理部131は当該信号に基づいて、獣類が獣類捕獲装置1内へ進入したか、獣類が獣類捕獲装置1外へ退出したかを判定する(ステップS1)。この結果、獣類が獣類捕獲装置1外へ退出したと判定されると(ステップS1で“退出”)、演算処理部131は入頭数を1だけデクリメントし(ステップS2)、獣類が退出した時間、獣類が退出した扉ユニット、及び獣類が退出したことを示す情報を記録部133の履歴テーブルD1に記録し(ステップS3)、そのまま入頭数カウント処理を終了する。その後、演算処理部131は、監視動作に復帰する。他方、獣類が獣類捕獲装置1内へ進入したと判定されると(ステップS1で“進入”)、演算処理部131は入頭数を1だけインクリメントし(ステップS4)、獣類が進入した時間、獣類が進入した扉ユニット、及び獣類が進入したことを示す情報を記録部133の履歴テーブルD1に記録する(ステップS5)。以上の処理の後、演算処理部131は、入頭数と設定された目標頭数とを比較し(ステップS6)、入頭数が目標頭数以上であった場合(ステップS6でYES)、演算処理部131は、入出力ポート134を介して各扉ユニット11,11に設けられた開閉トリガT,Tを動作させ、進入部110g,110gを閉鎖する(ステップS7)。その後、監視動作を終了させ(ステップS8)、入頭数カウント処理を終了する。他方、入頭数が目標頭数未満であった場合(ステップS6でNO)、そのまま入頭数カウント処理を終了する。その後、演算処理部131は監視動作に復帰する。なお、監視動作中に動作終了時間に達した場合、演算処理部131は自動的に監視動作を終了する。
【0042】
以上のように、本実施の形態では、複数の進入部110g,110gを設け、且つ獣類捕獲装置1の内部に進入した獣類の頭数をカウントし、予め設定された目標頭数以上となった場合に捕獲動作を実行するため、従来の獣類捕獲装置と比較して、複数の獣類を高い確率で捕獲することができるようになり、捕獲効率が向上する。
【0043】
次に、監視動作モードにおける獣類捕獲装置1の動作について説明する。
監視動作モードでは、上述の入頭数カウント処理におけるステップS6〜ステップS8の入頭数と目標頭数との比較及び進入部110g,110gの閉鎖等の処理は行われず、ステップS1〜ステップS5までの進入か退出かの判定、入頭数のカウント、及び各種情報の履歴テーブルD1への記録のみが行われる。これにより、本実施の形態では、目標頭数を0と設定することで、入頭数のカウント及び履歴の記録のみを実行することができる。このため、獣類捕獲装置1を設置した後に、捕獲動作を行わず、獣類捕獲装置1内へ獣類を自由に出入りさせ、獣類の獣類捕獲装置1への警戒心を和らげるために設けられる慣らし期間において、入頭数のカウント及び履歴の記録を実行することで、所定の時間内における最大入頭数、又は所定の期間内における最大入頭数の平均値等の目標頭数の目安となる値を得ることができる。これにより、獣類捕獲装置1の設置場所における捕獲可能頭数を見積もることができ、捕獲効率の向上を図ることができる。
【0044】
また、本実施の形態では、獣類が進入したか又は退出したかを、進入部110g,110g毎に記録している。このため、慣らし期間等において得られる進入部110g,110g毎の進入又は退出した頭数を確認することで、他の進入部と比較して、進入した獣類の数が少ない進入部、又は退出した獣類の数が多い進入部を知ることができる。これらの情報に基づいて、進入部110gの方向等の配置を変更することで、捕獲効率の向上を図ることができる。
【0045】
また、本実施の形態では、獣類捕獲装置1は、動作開始時間及び動作終了時間に基づいて、自動で監視動作を開始及び終了するため、使用者等における監視の負担を軽減することができる。
【0046】
(その他の実施の形態)
なお、上述した実施の形態では、赤外線遮断式のセンサ12を用いて進入部110gからの獣類の進入及び退出を検知することで、獣類捕獲装置1内の獣類の頭数を検知するよう構成されているが、本発明はこれに限定されるものではない。例えば、進入部からの獣類の進入及び退出を検知することができるのであれば、赤外線反射式等の他の方式のセンサを用いてもよい。さらに、獣類捕獲装置1内の獣類の入頭数を検知することができるのであれば、カメラ等を用いて、獣類捕獲装置1内を監視し、画像処理により入頭数を検知するように構成されていてもよい。
【0047】
また、上述した実施の形態では、獣類捕獲装置1は、使用者により設定された動作開始時間及び動作終了時間に基づいて、自動的に監視動作を開始又は終了するように構成されているが、本発明はこれに限定されるものではない。例えば、使用者が制御部13を操作し、手動で監視動作を開始又は終了するように構成されていてもよい。
【0048】
また、上述した実施の形態では、入頭数と目標頭数とを比較し、入頭数が目標頭数以上となった場合のみ、進入部110g,110gを閉鎖するように構成されているが、本発明はこれに限定されるものではない。例えば、制御部が所定の回数以上の退出を連続で検知した場合において、入頭数がゼロでなければ、進入部110g,110gを閉鎖するように構成されていてもよい。
【0049】
また、上述した実施の形態では、監視動作中に動作終了時間に達した場合、そのまま監視動作を終了するように構成されているが、本発明はこれに限定されるものではない。例えば、監視動作中に動作終了時間に達した場合であっても、その時点における入頭数を確認し、入頭数が1以上の場合には、進入部110g,110gを閉鎖するように構成されていてもよい。
【0050】
また、上述した実施の形態では、入頭数が目標頭数に達した場合、進入部110g,110gは、同時に閉鎖するように構成されているが、本発明はこれに限定されるものではない。例えば、進入部110g,110g毎に目標頭数を設定し、進入部110g,110g毎に入頭数カウント処理を行うことで、進入部110g,110gそれぞれを個別に閉鎖するように構成されていてもよい。
【0051】
また、上述した実施の形態では、目標頭数は、使用者が任意に設定するように構成されているが、本発明はこれに限定されるものではない。例えば、記録部に動作開始から所定の期間、入頭数のカウント及び日毎の最大入頭数の記録を行い、所定の期間が経過後、当該期間中に記録された最大入頭数の記録に基づいて、制御部13が自動で目標頭数を設定するよう構成されていてもよい。
【0052】
また、上述した実施の形態では、動作準備において設定される目標頭数に基づいて、動作モードが切り替わるように構成されているが、本発明はこれに限定されるものではない。例えば、動作モードを任意に切り替えることができるのであれば、タッチパネル式表示部132を操作することにより、動作モードを切替可能なように構成されていてもよい。
【0053】
また、上述した実施の形態では、扉ユニット11は、柵ユニット10下部の進入部110gを、落とし扉113を昇降させることで開閉するよう構成されているが、本発明はこれに限定されるものではない。例えば、柵ユニット10の一部を開閉することができるのであれば、開き戸又は引き戸等のような構成であってもよい。
【0054】
また、上述した実施の形態では、扉ユニット11は2つ備えられているが、本発明はこれに限定されるものではなく、獣類捕獲装置1内に獣類を効率的に誘い入れることができるように、扉ユニット11は2つ以上備えられていればよい。
【0055】
また、上述した実施の形態では、扉ユニット11,11は、隣接する別の面にそれぞれ配設されるが、本発明はこれに限定されるものではなく、獣類捕獲装置内に獣類を誘い入れることができるのであれば、対向する面又は同一の面等にそれぞれ配設されていてもよい。
【0056】
また、上述した実施の形態では、柵ユニット10〜10及び扉ユニット11,11を連結することで捕獲空間を形成し、扉ユニット11,11の進入部110g,110gを閉鎖することで獣類捕獲装置1内の獣類を捕獲するよう構成されているが、本発明はこれに限定されるものではない。例えば、ドロップネット等を用いて、捕獲空間内に進入した獣類を捕獲するよう構成されていてもよい。
【0057】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11は、平面視で矩形となるように配設されているが、本発明はこれに限定されるものではない。例えば、獣類捕獲装置1を設置する地形の形状又は状態に応じて、円形又は三角形等、他の形状となるように配設されていてもよい。
【0058】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11それぞれは、サイズ及び形状が同一のものを用いているが、本発明はこれに限定されるものではなく、複数のユニットをそれぞれ連結し、組み立てることが可能であれば、サイズ又は形状の違うユニットを用いてもよい。
【0059】
また、上述した実施の形態では、獣類捕獲装置1は上部を封鎖する天井部材等は備えておらず、その上方は開放されているが、本発明はこれに限定されるものではない。例えば、獣類捕獲装置1のサイズ又は形状の変更に対応できるよう、サイズ又は形状等を調整することができるのであれば、上部を封鎖する部材としてネット又はシート等を備えていてもよい。
【0060】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11は、連結鉄筋線に連結コイル14を巻き付けることで連結しているが、本発明はこれに限定されるものではない。例えば、各ユニットを連結することができるのであれば、ワイヤークリップ、シャックル、又はクランプ等を用いて連結されていてもよい。ここで、ワイヤークリップ、シャックル、又はクランプ等は取り付ける際に、ねじ締め等の手順が必要となるが、連結コイルを用いる場合、単純に連結鉄筋線に当該連結コイルを巻き付けるだけでよく、他の方法と比較して、より容易且つ短時間で組み立て又は分解をすることができる。このため、本実施の形態の発明では、各ユニットを連結するための連結部材は、連結コイル等のような螺旋状のものを用いることが望ましい。
【0061】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11に、鉄線を組み合わせた溶接金網を用いているが、本発明はこれに限定されるものではない。例えば、獣類捕獲装置1内に捕獲された獣類が脱出しないよう構成されているのであれば、溶接金網を用いている部位に、複数の鉄棒を配設することで、鉄柵を構成するようにしてもよい。しかし、複数の鉄棒を配設し、鉄柵を構成する等の場合、溶接金網を用いた場合と比較して、各ユニットの重量が重くなってしまう。このため、本発明では軽量化のために、溶接金網を用いることが望ましい。
【0062】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11の上部に設けられた傾斜部は、45°傾斜するよう構成されているが、本発明はこれに限定されるものではなく、獣類捕獲装置内に捕獲された獣類がユニットを飛び越えて脱出することを防ぐことができるのであれば、角度は問わない。
【0063】
また、上述した実施の形態では、複数の柵ユニット10〜10及び複数の扉ユニット11,11を連結することで、獣類を捕獲可能な捕獲空間を形成しているが、本発明はこれに限定されるものではなく、獣類が捕獲可能な捕獲空間を形成することができるのであれば、従来用いられているような箱罠又は囲い罠等を用いてもよい。
【産業上の利用可能性】
【0064】
本発明の獣類捕獲装置は、獣類を捕獲するための獣類捕獲装置として有用である。
【符号の説明】
【0065】
1 獣類捕獲装置
10 柵ユニット
11 扉ユニット
12 センサ
13 制御部
14 連結コイル
10a,110a,113a 溶接金網
10b,110b 連結鉄筋線
10c 屈曲部
10d,110d 傾斜部
110 柵部
111 ガイド枠部
112 ブラケット
113 落とし扉
110e,111a 縦アングル
110f,111b 横アングル
113b 鉄筋線
121 赤外線投光器
122 赤外線受光器
121a,121b 投光部
122a,122b 受光部
121c,122c 支持部
131 演算処理部
132 タッチパネル式表示部
133 記録部
134 入出力ポート
T 開閉トリガ
【技術分野】
【0001】
本発明は、野山に生息する害獣等の獣類を捕獲するために用いる獣類捕獲装置に関する。
【背景技術】
【0002】
従来、野山に生息する有害鳥獣を捕獲する手段として、種々の罠又は捕獲装置が開発、開示されている。特許文献1では、隣接する複数の面それぞれに扉部を有しており、感知部が獣類の進入を感知すると、複数の前記扉部を同時に閉鎖するよう構成される獣類の捕獲装置が開示されている。これによれば、隣接する面それぞれに扉部を有しており、捕獲装置は開放されているため、捕獲装置に対する獣類の警戒心を和らげることができ、容易に獣類を捕獲装置内部に誘い入れることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−300847号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来の獣類の捕獲装置では、装置内部に進入した獣類がたとえ1頭であったとしても、感知部が獣類の進入を感知すると、複数の扉部全てを閉鎖してしまうため、一度に複数頭の獣類を捕獲することが困難であるという問題がある。
【0005】
本発明は斯かる事情に鑑みてなされたものであり、その主たる目的は、上記課題を解決することができる獣類捕獲装置を提供することにある。
【課題を解決するための手段】
【0006】
上述の課題を解決するために、本発明の一の態様の獣類捕獲装置は、獣類を捕獲するための捕獲空間を具備する檻部と、前記捕獲空間への獣類の入出が可能なように前記檻部の側面に設けられる複数の開口部と、前記捕獲空間内の獣類の頭数を検知する、頭数検知手段と、前記頭数検知手段により検知される獣類の頭数が、予め設定される捕獲目標頭数以上となった場合に、前記捕獲空間内の獣類を捕獲する獣類捕獲手段と、を備える。
【0007】
この態様において、前記頭数検知手段は、前記複数の開口部それぞれからの、前記捕獲空間への獣類の入出を検知することで、前記捕獲空間内の獣類の頭数を検知するように構成されていてもよい。
【0008】
この態様において、前記頭数検知手段が前記捕獲空間への獣類の入出を検知したとき、少なくとも当該獣類が進入したか退出したかを示す情報を含む入出情報を記録する記録部をさらに備えていてもよい。
【0009】
この態様において、前記頭数検知手段により検知される獣類の頭数に基づいて、前記獣類捕獲手段により、前記捕獲空間内の獣類の捕獲を行う、第1の動作モードと、前記獣類捕獲手段による前記捕獲空間内の獣類の捕獲を行わずに、前記記録部への入出情報の記録を行う、第2の動作モードと、を選択的に実行可能なように構成されていてもよい。
【0010】
この態様において、前記獣類捕獲手段は、前記複数の開口部を閉鎖することで、前記捕獲空間内の獣類を捕獲するように構成されていてもよい。
【0011】
この態様において、前記檻部は、複数の側面ユニットと、複数の連結部材と、を有し、前記複数の側面ユニットが、前記連結部材を用いて互いに連結自在に構成されており、前記複数の側面ユニットが一定の領域を囲むように横方向に並べられ、隣り合う前記側面ユニット同士が前記連結部材を用いて連結されることにより、前記捕獲空間を形成するよう構成されていてもよい。
【発明の効果】
【0012】
本発明に係る獣類捕獲装置によれば、一度に複数頭の獣類を捕獲することができる。
【図面の簡単な説明】
【0013】
【図1】獣類捕獲装置の構成を示す斜視図。
【図2】柵ユニットの構成を示す正面図。
【図3】柵ユニットの構成を示す側面図。
【図4】扉ユニットの構成を示す正面図。
【図5】扉ユニットの構成を示す側面図。
【図6】柵部の構成を示す正面図。
【図7】柵部の構成を示す側面図。
【図8】ガイド枠部の構成を示す正面図。
【図9】落とし扉の構成を示す正面図。
【図10】センサの構成を示す模式図。
【図11】制御部の構成を示すブロック図。
【図12】履歴テーブルの一例を示す模式図。
【図13】連結コイルによる連結方法を示す模式図。
【図14】獣類捕獲装置の監視動作中における入頭数カウント処理のフローチャート。
【発明を実施するための形態】
【0014】
以下、本発明の好ましい実施の形態を、図面を参照しながら説明する。
【0015】
図1は、本実施の形態に係る獣類捕獲装置1の構成を示す斜視図である。図1に示すように獣類捕獲装置1は、横方向に並べて配設され、獣類捕獲装置1の側面部を構成する14枚の柵ユニット10〜10及び2枚の扉ユニット11,11を備える。これらのユニットは、平面視で全体が矩形となるように配設される。なお、扉ユニット11,11は、図1に示すように、隣接する別の面にそれぞれ配設される。隣接するユニット同士は、当該ユニットの側縁部に連結コイル(図示せず)を巻き付けることで連結される。ここで、獣類捕獲装置1は上部を封鎖する天井部材等は備えておらず、獣類捕獲装置1の上方は開放されている。
【0016】
また、獣類捕獲装置1は、扉ユニット11,11から獣類捕獲装置1内部への獣類の進入を赤外線により検知する2組のセンサ12,12と、センサ12,12の検知に基づいて扉ユニット11,11を閉鎖させる制御部(図示せず)と、を備える。なお、制御部の詳しい構成については後述する。
【0017】
次に、各ユニットの構成について説明する。なお、以下の説明において、各ユニットを配設し、獣類捕獲装置1を組み立てたときに、各ユニットにおいて獣類捕獲装置1の外側を向く面をユニットの前面、獣類捕獲装置1の内側を向く面をユニットの後面と定義する。また、各ユニットを配設し、獣類捕獲装置1を組み立てたときに、各ユニットにおいて、地面と接する側をユニットの下側、それとは反対側をユニットの上側と定義する。
【0018】
柵ユニット10の構成について説明する。図2は柵ユニット10の構成を示す正面図、図3は柵ユニット10の構成を示す側面図である。柵ユニット10は、直径6mmの鉄線が等間隔になるよう縦横に直角に配設され、配設された鉄線の各交点が溶接された溶接金網10aと、溶接金網10aを挟むように配設され、溶接金網10aに溶接される直径10mmの連結鉄筋線10b,10bと、を備えるパネル状ユニットである。溶接金網10aの大きさは、横1000mm、縦2500mmである。連結鉄筋線11b,11bの長さは、2500mmであり、溶接金網10aの長辺側両端に沿って溶接される。柵ユニット10の下部は、下端から300mmの位置でユニットの後面に向かって直角に屈曲しており、屈曲部10cを構成する。また、柵ユニット10の上部は、上端から500mmの位置でユニットの後面に向かって45°傾斜しており、傾斜部10dを構成する。
【0019】
扉ユニット11の構成について説明する。図4は扉ユニット11の構成を示す正面図、図5は扉ユニット11の構成を示す側面図である。扉ユニット11は柵ユニット10の下部を開口し、当該開口した部分を開閉可能なように扉を取り付けたユニットであって、柵を構成する柵部110と、柵部110と連結することによって、柵部110との間に扉のガイドを構成するガイド枠部111と、柵部110とガイド枠部111とを連結する6つのブラケット112〜112と、連結された柵部110及びガイド枠部111に沿って昇降することが可能な落とし扉113と、を備える。
【0020】
図6は柵部110の構成を示す正面図、図7は柵部110の構成を示す側面図である。柵部110は、直径6mmの鉄線が等間隔になるよう縦横に直角に配設され、配設された鉄線の各交点が溶接された溶接金網110aと、直径10mmの連結鉄筋線110b,110bと、溶接金網110a及び連結鉄筋線110b,110bが溶接される枠組となる縦アングル110e,110e及び横アングル110f,110fと、落とし扉113を昇降するための開閉トリガTと、を有する。縦アングル110eのサイズはL3×40×40×2000であり、横アングル110fのサイズはL3×40×40×1000である。横アングル110f,110fは、縦アングル110e,110eの中間部分及び下端のそれぞれに溶接される。これにより、縦アングル110e,110e及び横アングル110f,110fは、柵部110の枠組となる。
【0021】
溶接金網110aの大きさは、縦1200mm、横1000mmであり、柵部110の枠組の上部に溶接される。ここで、枠組に溶接されるのは、溶接金網110aの下部700mmのみであり、溶接金網110aの上部500mmは、枠組と溶接されず、ユニットの後面に向かって45°傾斜した傾斜部110dを構成する。柵部110の下部は開口しており、捕獲対象となる獣類が侵入するための進入部110gを構成する。また、連結鉄筋線110b,110bは、縦アングル110e,110eそれぞれに溶接される。また、縦アングル110e,110eの中間部分に溶接された横アングル110fには、開閉トリガTが配設される。
【0022】
開閉トリガTは、プル型ソレノイドを備える。プル型ソレノイドは、プランジャと呼ばれる可動鉄棒を有しており、初期の状態ではプランジャは突出しているが、プル型ソレノイドに電流が流れると、プランジャはプル型ソレノイド内部に吸引される。本実施の形態では、開閉トリガTは、初期の状態ではプル型ソレノイドの突出したプランジャが落とし扉113を保持し、プル型ソレノイドに電流が流れた場合に、落とし扉113を保持しているプランジャがプル型ソレノイド内部に吸引され、落とし扉113が落下するように構成されている。
【0023】
図8はガイド枠部111の構成を示す正面図である。ガイド枠部111は、縦アングル111a,111a及び横アングル111b,111bを有する。縦アングル111aのサイズは、L5×40×40×1200mmであり、横アングル111bのサイズは、L5×40×40×1000mmである。ここで、横アングル111b,111bは、縦アングル111a,111aの上端から200mmの位置及び下端のそれぞれに溶接される。
【0024】
ガイド枠部111は、柵部110の進入部110gの前面に配設され、ガイド枠部111と柵部110とは、ブラケット112により連結される。このとき、ガイド枠部111と柵部110とは、約20mm程度の間隙を空けて連結される。この間隙は落とし扉113のガイドとして機能する。
【0025】
図9は落とし扉113の構成を示す正面図である。落とし扉113は、直径6mmの鉄線が等間隔になるよう縦横に直角に配設され、配設された鉄線の各交点が溶接された溶接金網113aと、溶接金網113aを補強する直径10mmの鉄筋線113bと、を有する。溶接金網113aの大きさは、縦1010mm、横1000mmである。鉄筋線113bは、溶接金網113aの四辺を取り囲むようにして、溶接金網113aに溶接される。落とし扉113は、柵部110及びガイド枠部111それぞれの縦アングルに沿って昇降可能なように、柵部110とガイド枠部111との間に設けられた間隙に配設される。
【0026】
図10はセンサ12の構成を示す模式図である。センサ12は、赤外線遮断式センサであり、赤外線投光器121と、赤外線受光器122と、を備える。赤外線投光器121は、2つの投光部121a,121bと、投光部121a,121bを支持する支持部121cと、を有する。赤外線受光器122は、2つの受光部122a,122bと、受光部122a,122bを支持する支持部122cと、を有する。図10に示すように、赤外線投光器121と赤外線受光器122とは進入部110gの前面に、進入部110gを挟むように、且つ投光部121aと受光部122aとが対向し、投光部121bと受光部122bとが対向するように配設される。投光部121a,121bは、赤外線を放射し、受光部122a,122bは、投光部121a,121bそれぞれから放射される赤外線を受光するように構成されている。さらに、受光部122a,122bは、投光部121a,121bからの赤外線を受光できなかった場合に、信号を発信するように構成されている。ここで、獣類が進入部110gを通過し獣類捕獲装置1内に進入又は退出するとき、赤外線投光器121及び赤外線受光器122の間を通過するため、獣類が投光部121a,121bと受光部122a,122bとの間を遮断し、受光部122a,122bは、投光部からの赤外線を受光できなくなる。これにより、受光部122a,122bは、獣類の通過に基づいて信号を発信する。なお、本実施の形態では、図10に示すように、投光部121b及び受光部122bは、進入部110gの近傍に配置され、投光部121a及び受光部122aは、投光部121b及び受光部122bよりも進入部110gから離れた位置に配置される。
【0027】
図11は、制御部13の構成を示すブロック図である。制御部13は、獣類捕獲装置1の捕獲動作を制御するための制御装置であって、演算処理部131と、タッチパネル式表示部132と、記録部133と、入出力ポート134と、を有している。演算処理部131は、タッチパネル式表示部132、記録部133、及び入出力ポート134それぞれと接続されており、タッチパネル式表示部132、記録部133、及び入出力ポート134それぞれとデータ又は信号等をやりとりすることが可能なように構成されている。タッチパネル式表示部132は、入力部及び表示部を兼ねた入出力インタフェースであり、獣類捕獲装置1を使用する使用者がタッチパネル式表示部132を操作することで、獣類捕獲装置1の動作条件等を設定することができる。記録部133は、獣類の獣類捕獲装置1内への進入及び退出の検知履歴を記録する履歴テーブルを格納する記録領域を有している。図12は、履歴テーブルD1の一例を示す模式図である。履歴テーブルD1には、獣類の進入又は退出した扉ユニットを示す入出扉ユニット情報D101と、獣類の進入又は退出を検知した日時を示す入出時間情報D102と、獣類が進入したか退出したかを示す入出判定情報D103と、を要素として含んでいる。ここで、制御部13は、タッチパネル式表示部132に、履歴テーブルD1に記録された情報を表示することができる。これにより、使用者は、タッチパネル式表示部132を操作することで、履歴テーブルD1に記録された情報を閲覧することができる。入出力ポート134は、受光部122a,122bからの信号を受信できるように、センサ12,12と接続されている。これにより、演算処理部131は、入出力ポート134を介してセンサ12,12から発信される信号を受信し、当該信号に基づいて、獣類の獣類捕獲装置1内への進入及び退出を判定する。具体的な判定方法を以下に説明する。
【0028】
制御部13の演算処理部131による獣類の進入及び退出の判定方法について、具体的な動作を説明する。本実施の形態では、上述のように、投光部121b及び受光部122bは、進入部110gの近傍に配置され、投光部121a及び受光部122aは、投光部121b及び受光部122bよりも進入部110gから離れた位置に配置されている。このため、獣類が進入部110gから獣類捕獲装置1内部に進入する場合、獣類は、まず投光部121a及び受光部122aの間を通過し、その後、投光部121b及び受光部122bの間を通過する。よって、獣類が獣類捕獲装置1内部に進入する場合は、まず受光部122aが信号を発信し、次に受光部122bが信号を発信する。逆に、獣類が進入部110gから獣類捕獲装置1外部に退出する場合、獣類は、まず投光部121b及び受光部122bの間を通過し、その後、投光部121a及び受光部122aの間を通過する。よって、獣類が獣類捕獲装置1外部に退出する場合は、まず受光部122bが信号を発信し、次に受光部122aが信号を発信する。このため、演算処理部131は、まず受光部122aから信号を受信し、次に受光部122bから信号を受信した場合は、獣類が獣類捕獲装置1内部に進入したと判定する。逆に、まず受光部122bから信号を受信し、次に受光部122aから信号を受信した場合は、獣類が獣類捕獲装置1外部に退出したと判定する。
【0029】
また、入出力ポート134は開閉トリガT,Tと電気的に接続されており、演算処理部131からの信号に基づいて、開閉トリガT,Tそれぞれに電流を流し、開閉トリガT,Tそれぞれを動作させることができる。
【0030】
本実施の形態では、扉ユニット11,11は2つ備えられている。このため、進入部110gも、扉ユニット11と同様に2つ設けられる。このように複数の進入部を設けることで、それぞれの進入部から獣類を獣類捕獲装置1内に誘い入れることができ、効率的に獣類を捕獲することができる。
【0031】
また、本実施の形態では、扉ユニット11,11は、隣接する別の面にそれぞれ配設されている。このため、扉ユニット11,11それぞれの進入部110g,110gは、それぞれ別の方向を向く。これにより、複数の方向から獣類を獣類捕獲装置1内に誘い入れることができ、効率的に獣類を捕獲することができる。
【0032】
また、本実施の形態では、複数の柵ユニット10及び複数の扉ユニット11を連結することで、獣類捕獲装置1を構成している。このため、任意の数のユニットを自在に連結することが可能であり、柵ユニット10又は扉ユニット11の数を増減することで、獣類捕獲装置1のサイズ又は形状を容易に変更することができる。さらに、獣類捕獲装置1は自在に分解可能な複数のユニットを有するため、ユニット毎に分解することで、装置自体を容易に移動させることができる。
【0033】
また、本実施の形態では、柵ユニット10及び扉ユニット11の上部にユニットの後面に向かって傾斜する傾斜部が設けられており、この傾斜部が獣返しとして働くため、上方を封鎖するための天井部材等を備えずとも、獣類捕獲装置1内に捕獲された獣類がユニットを飛び越えて、獣類捕獲装置1から脱出するのを防ぐことができる。これにより、獣類捕獲装置1の上部に、別途、捕獲された獣類の脱出を防ぐための天部材等を設ける必要がなく、装置を軽量化することができる。さらに、上部に別途、天部材等を設ける必要がないために、当該天部材等にサイズ及び形状が依存することがなく、獣類捕獲装置1のサイズ又は形状を容易に変更することができる。
【0034】
また、本実施の形態では、柵ユニット10の下部にはユニットの後面に向かって屈曲した屈曲部10cが設けられており、この屈曲部10cが、獣類捕獲装置1内に捕獲された獣類が穴を掘り、獣類捕獲装置1から脱出するのを防ぐ。これにより、獣類捕獲装置1の底部に、別途、獣類の脱出を防ぐための底部材等を設ける必要がなく、装置を軽量化することができる。さらに、底部に別途、底部材等を設ける必要がないために、当該底部材等にサイズ及び形状が依存することがなく、獣類捕獲装置1のサイズ又は形状を容易に変更することができる。
【0035】
上記のような構成の獣類捕獲装置1の使用方法について、以下に説明する。
まず、各ユニットの連結方法について説明する。獣類捕獲装置1を設置する設置者は、隣接する柵ユニット10,10それぞれの連結鉄筋線10b,10bに各ユニットを連結するための連結部材である連結コイル14を巻き付ける。これにより、連結鉄筋線10b,10bが結束され、当該柵ユニット10,10が連結される(図13を参照)。また、設置者は、隣接する柵ユニット10及び扉ユニット11についても、同様にしてそれぞれの連結鉄筋線10b,110bに連結コイル14を巻き付ける。これにより、連結鉄筋線10b,110bが結束され、当該柵ユニット10及び扉ユニット11が連結される。
【0036】
このように、本実施の形態では、各ユニットは、連結鉄筋線を連結部材で結束することにより連結される。このため、容易に且つ短時間で組み立てたり、分解したりすることができる。
【0037】
また、本実施の形態では、各側縁部は、連結部材により結束されているだけであるため、従来用いられているボルト止め又は通し部材等による連結のように堅固なものではなく、ある程度の弾力を有する弾性的な連結となる。このように、隣接する各ユニットそれぞれの側縁部は弾性的に連結されるため、獣類捕獲装置1全体は軟構造となる。これにより、獣類捕獲装置1内に捕獲された獣類が、獣類捕獲装置1内から脱出するために暴れ、側面部に衝撃が加わったとしても、各ユニットの連結箇所で当該衝撃を吸収することができ、獣類捕獲装置1の大きな変形や破損等を防ぐことができる。
【0038】
また、従来用いられているボルト止め又は通し部材等の連結部材による連結の場合、堅固に各構成部材を連結するために、構成部材に強い衝撃が加わる等によって周縁部が変形すると、それに伴って連結部材も変形してしまい、解体が困難となってしまう。一方、本実施の形態では、連結部材は連結鉄筋線を結束しているだけであるため、連結鉄筋線に変形が生じた場合であっても、連結部材は当該変形に対応して回転等の移動をすることが可能である。これにより、連結鉄筋線が変形した場合でも、連結部材が大きく変形することを防ぐことができる。また、たとえ連結部材が大きく変形してしまった場合であっても、当該連結部材は連結鉄筋線を結束するように連結鉄筋線に巻き付けられているだけであるため、容易に取り外すことができる。
【0039】
次に、獣類捕獲装置1の固定方法について説明する。設置者は、柵ユニット10の屈曲部10cにペグを打ち込むことにより、当該柵ユニット10を地面に固定する。また、このように全ての柵ユニット10〜10を地面に固定することで、上述のようにして柵ユニット10と連結された扉ユニット11も固定される。
【0040】
次に、上記のようにして設置した獣類捕獲装置1の動作について説明する。
まず、獣類捕獲装置1を使用する使用者は、制御部13の電源を入れ、制御部13を起動させる。制御部13が起動すると、使用者は、動作準備として、タッチパネル式表示部132を操作し、監視動作を開始する動作開始時間、監視動作を終了する動作終了時間、及び捕獲目標となる目標頭数を設定する。なお、本実施の形態では、獣類捕獲装置1は、捕獲動作モード及び監視動作モードの2つの動作モードを有しており、上記の動作準備において、目標頭数を1以上に設定した場合、捕獲動作モードが実行される。他方、目標頭数を0と設定した場合、監視動作モードが実行される。これらの動作モードにおける具体的な動作を以下に説明する。
【0041】
まず、捕獲動作モードにおける獣類捕獲装置1の動作について説明する。
上述の動作準備が完了した後、動作開始時間に達すると、制御部13の演算処理部131は自動的に監視動作を開始する。ここで、演算処理部131は、監視動作の開始時に獣類捕獲装置1内の獣類の数を示す入頭数を0に設定する。監視動作中に演算処理部131が入出力ポート134を介して、センサ12,12からの信号を受信すると、演算処理部131は入頭数カウント処理を行う。図14は、演算処理部131が行う入頭数カウント処理のフローチャートである。演算処理部131がセンサ12からの信号を受信すると、演算処理部131は当該信号に基づいて、獣類が獣類捕獲装置1内へ進入したか、獣類が獣類捕獲装置1外へ退出したかを判定する(ステップS1)。この結果、獣類が獣類捕獲装置1外へ退出したと判定されると(ステップS1で“退出”)、演算処理部131は入頭数を1だけデクリメントし(ステップS2)、獣類が退出した時間、獣類が退出した扉ユニット、及び獣類が退出したことを示す情報を記録部133の履歴テーブルD1に記録し(ステップS3)、そのまま入頭数カウント処理を終了する。その後、演算処理部131は、監視動作に復帰する。他方、獣類が獣類捕獲装置1内へ進入したと判定されると(ステップS1で“進入”)、演算処理部131は入頭数を1だけインクリメントし(ステップS4)、獣類が進入した時間、獣類が進入した扉ユニット、及び獣類が進入したことを示す情報を記録部133の履歴テーブルD1に記録する(ステップS5)。以上の処理の後、演算処理部131は、入頭数と設定された目標頭数とを比較し(ステップS6)、入頭数が目標頭数以上であった場合(ステップS6でYES)、演算処理部131は、入出力ポート134を介して各扉ユニット11,11に設けられた開閉トリガT,Tを動作させ、進入部110g,110gを閉鎖する(ステップS7)。その後、監視動作を終了させ(ステップS8)、入頭数カウント処理を終了する。他方、入頭数が目標頭数未満であった場合(ステップS6でNO)、そのまま入頭数カウント処理を終了する。その後、演算処理部131は監視動作に復帰する。なお、監視動作中に動作終了時間に達した場合、演算処理部131は自動的に監視動作を終了する。
【0042】
以上のように、本実施の形態では、複数の進入部110g,110gを設け、且つ獣類捕獲装置1の内部に進入した獣類の頭数をカウントし、予め設定された目標頭数以上となった場合に捕獲動作を実行するため、従来の獣類捕獲装置と比較して、複数の獣類を高い確率で捕獲することができるようになり、捕獲効率が向上する。
【0043】
次に、監視動作モードにおける獣類捕獲装置1の動作について説明する。
監視動作モードでは、上述の入頭数カウント処理におけるステップS6〜ステップS8の入頭数と目標頭数との比較及び進入部110g,110gの閉鎖等の処理は行われず、ステップS1〜ステップS5までの進入か退出かの判定、入頭数のカウント、及び各種情報の履歴テーブルD1への記録のみが行われる。これにより、本実施の形態では、目標頭数を0と設定することで、入頭数のカウント及び履歴の記録のみを実行することができる。このため、獣類捕獲装置1を設置した後に、捕獲動作を行わず、獣類捕獲装置1内へ獣類を自由に出入りさせ、獣類の獣類捕獲装置1への警戒心を和らげるために設けられる慣らし期間において、入頭数のカウント及び履歴の記録を実行することで、所定の時間内における最大入頭数、又は所定の期間内における最大入頭数の平均値等の目標頭数の目安となる値を得ることができる。これにより、獣類捕獲装置1の設置場所における捕獲可能頭数を見積もることができ、捕獲効率の向上を図ることができる。
【0044】
また、本実施の形態では、獣類が進入したか又は退出したかを、進入部110g,110g毎に記録している。このため、慣らし期間等において得られる進入部110g,110g毎の進入又は退出した頭数を確認することで、他の進入部と比較して、進入した獣類の数が少ない進入部、又は退出した獣類の数が多い進入部を知ることができる。これらの情報に基づいて、進入部110gの方向等の配置を変更することで、捕獲効率の向上を図ることができる。
【0045】
また、本実施の形態では、獣類捕獲装置1は、動作開始時間及び動作終了時間に基づいて、自動で監視動作を開始及び終了するため、使用者等における監視の負担を軽減することができる。
【0046】
(その他の実施の形態)
なお、上述した実施の形態では、赤外線遮断式のセンサ12を用いて進入部110gからの獣類の進入及び退出を検知することで、獣類捕獲装置1内の獣類の頭数を検知するよう構成されているが、本発明はこれに限定されるものではない。例えば、進入部からの獣類の進入及び退出を検知することができるのであれば、赤外線反射式等の他の方式のセンサを用いてもよい。さらに、獣類捕獲装置1内の獣類の入頭数を検知することができるのであれば、カメラ等を用いて、獣類捕獲装置1内を監視し、画像処理により入頭数を検知するように構成されていてもよい。
【0047】
また、上述した実施の形態では、獣類捕獲装置1は、使用者により設定された動作開始時間及び動作終了時間に基づいて、自動的に監視動作を開始又は終了するように構成されているが、本発明はこれに限定されるものではない。例えば、使用者が制御部13を操作し、手動で監視動作を開始又は終了するように構成されていてもよい。
【0048】
また、上述した実施の形態では、入頭数と目標頭数とを比較し、入頭数が目標頭数以上となった場合のみ、進入部110g,110gを閉鎖するように構成されているが、本発明はこれに限定されるものではない。例えば、制御部が所定の回数以上の退出を連続で検知した場合において、入頭数がゼロでなければ、進入部110g,110gを閉鎖するように構成されていてもよい。
【0049】
また、上述した実施の形態では、監視動作中に動作終了時間に達した場合、そのまま監視動作を終了するように構成されているが、本発明はこれに限定されるものではない。例えば、監視動作中に動作終了時間に達した場合であっても、その時点における入頭数を確認し、入頭数が1以上の場合には、進入部110g,110gを閉鎖するように構成されていてもよい。
【0050】
また、上述した実施の形態では、入頭数が目標頭数に達した場合、進入部110g,110gは、同時に閉鎖するように構成されているが、本発明はこれに限定されるものではない。例えば、進入部110g,110g毎に目標頭数を設定し、進入部110g,110g毎に入頭数カウント処理を行うことで、進入部110g,110gそれぞれを個別に閉鎖するように構成されていてもよい。
【0051】
また、上述した実施の形態では、目標頭数は、使用者が任意に設定するように構成されているが、本発明はこれに限定されるものではない。例えば、記録部に動作開始から所定の期間、入頭数のカウント及び日毎の最大入頭数の記録を行い、所定の期間が経過後、当該期間中に記録された最大入頭数の記録に基づいて、制御部13が自動で目標頭数を設定するよう構成されていてもよい。
【0052】
また、上述した実施の形態では、動作準備において設定される目標頭数に基づいて、動作モードが切り替わるように構成されているが、本発明はこれに限定されるものではない。例えば、動作モードを任意に切り替えることができるのであれば、タッチパネル式表示部132を操作することにより、動作モードを切替可能なように構成されていてもよい。
【0053】
また、上述した実施の形態では、扉ユニット11は、柵ユニット10下部の進入部110gを、落とし扉113を昇降させることで開閉するよう構成されているが、本発明はこれに限定されるものではない。例えば、柵ユニット10の一部を開閉することができるのであれば、開き戸又は引き戸等のような構成であってもよい。
【0054】
また、上述した実施の形態では、扉ユニット11は2つ備えられているが、本発明はこれに限定されるものではなく、獣類捕獲装置1内に獣類を効率的に誘い入れることができるように、扉ユニット11は2つ以上備えられていればよい。
【0055】
また、上述した実施の形態では、扉ユニット11,11は、隣接する別の面にそれぞれ配設されるが、本発明はこれに限定されるものではなく、獣類捕獲装置内に獣類を誘い入れることができるのであれば、対向する面又は同一の面等にそれぞれ配設されていてもよい。
【0056】
また、上述した実施の形態では、柵ユニット10〜10及び扉ユニット11,11を連結することで捕獲空間を形成し、扉ユニット11,11の進入部110g,110gを閉鎖することで獣類捕獲装置1内の獣類を捕獲するよう構成されているが、本発明はこれに限定されるものではない。例えば、ドロップネット等を用いて、捕獲空間内に進入した獣類を捕獲するよう構成されていてもよい。
【0057】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11は、平面視で矩形となるように配設されているが、本発明はこれに限定されるものではない。例えば、獣類捕獲装置1を設置する地形の形状又は状態に応じて、円形又は三角形等、他の形状となるように配設されていてもよい。
【0058】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11それぞれは、サイズ及び形状が同一のものを用いているが、本発明はこれに限定されるものではなく、複数のユニットをそれぞれ連結し、組み立てることが可能であれば、サイズ又は形状の違うユニットを用いてもよい。
【0059】
また、上述した実施の形態では、獣類捕獲装置1は上部を封鎖する天井部材等は備えておらず、その上方は開放されているが、本発明はこれに限定されるものではない。例えば、獣類捕獲装置1のサイズ又は形状の変更に対応できるよう、サイズ又は形状等を調整することができるのであれば、上部を封鎖する部材としてネット又はシート等を備えていてもよい。
【0060】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11は、連結鉄筋線に連結コイル14を巻き付けることで連結しているが、本発明はこれに限定されるものではない。例えば、各ユニットを連結することができるのであれば、ワイヤークリップ、シャックル、又はクランプ等を用いて連結されていてもよい。ここで、ワイヤークリップ、シャックル、又はクランプ等は取り付ける際に、ねじ締め等の手順が必要となるが、連結コイルを用いる場合、単純に連結鉄筋線に当該連結コイルを巻き付けるだけでよく、他の方法と比較して、より容易且つ短時間で組み立て又は分解をすることができる。このため、本実施の形態の発明では、各ユニットを連結するための連結部材は、連結コイル等のような螺旋状のものを用いることが望ましい。
【0061】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11に、鉄線を組み合わせた溶接金網を用いているが、本発明はこれに限定されるものではない。例えば、獣類捕獲装置1内に捕獲された獣類が脱出しないよう構成されているのであれば、溶接金網を用いている部位に、複数の鉄棒を配設することで、鉄柵を構成するようにしてもよい。しかし、複数の鉄棒を配設し、鉄柵を構成する等の場合、溶接金網を用いた場合と比較して、各ユニットの重量が重くなってしまう。このため、本発明では軽量化のために、溶接金網を用いることが望ましい。
【0062】
また、上述した実施の形態では、柵ユニット10及び扉ユニット11の上部に設けられた傾斜部は、45°傾斜するよう構成されているが、本発明はこれに限定されるものではなく、獣類捕獲装置内に捕獲された獣類がユニットを飛び越えて脱出することを防ぐことができるのであれば、角度は問わない。
【0063】
また、上述した実施の形態では、複数の柵ユニット10〜10及び複数の扉ユニット11,11を連結することで、獣類を捕獲可能な捕獲空間を形成しているが、本発明はこれに限定されるものではなく、獣類が捕獲可能な捕獲空間を形成することができるのであれば、従来用いられているような箱罠又は囲い罠等を用いてもよい。
【産業上の利用可能性】
【0064】
本発明の獣類捕獲装置は、獣類を捕獲するための獣類捕獲装置として有用である。
【符号の説明】
【0065】
1 獣類捕獲装置
10 柵ユニット
11 扉ユニット
12 センサ
13 制御部
14 連結コイル
10a,110a,113a 溶接金網
10b,110b 連結鉄筋線
10c 屈曲部
10d,110d 傾斜部
110 柵部
111 ガイド枠部
112 ブラケット
113 落とし扉
110e,111a 縦アングル
110f,111b 横アングル
113b 鉄筋線
121 赤外線投光器
122 赤外線受光器
121a,121b 投光部
122a,122b 受光部
121c,122c 支持部
131 演算処理部
132 タッチパネル式表示部
133 記録部
134 入出力ポート
T 開閉トリガ
【特許請求の範囲】
【請求項1】
獣類を捕獲するための捕獲空間を具備する檻部と、
前記捕獲空間への獣類の入出が可能なように前記檻部の側面に設けられる複数の開口部と、
前記捕獲空間内の獣類の頭数を検知する、頭数検知手段と、
前記頭数検知手段により検知される獣類の頭数が、予め設定される捕獲目標頭数以上となった場合に、前記捕獲空間内の獣類を捕獲する獣類捕獲手段と、
を備える、
獣類捕獲装置。
【請求項2】
前記頭数検知手段は、前記複数の開口部それぞれからの、前記捕獲空間への獣類の入出を検知することで、前記捕獲空間内の獣類の頭数を検知するように構成されている、
請求項1に記載の獣類捕獲装置。
【請求項3】
前記頭数検知手段が前記捕獲空間への獣類の入出を検知したとき、少なくとも当該獣類が進入したか退出したかを示す情報を含む入出情報を記録する記録部をさらに備える、
請求項2に記載の獣類捕獲装置。
【請求項4】
前記頭数検知手段により検知される獣類の頭数に基づいて、前記獣類捕獲手段により、前記捕獲空間内の獣類の捕獲を行う、第1の動作モードと、
前記獣類捕獲手段による前記捕獲空間内の獣類の捕獲を行わずに、前記記録部への入出情報の記録を行う、第2の動作モードと、
を選択的に実行可能なように構成されている、
請求項3に記載の獣類捕獲装置。
【請求項5】
前記獣類捕獲手段は、前記複数の開口部を閉鎖することで、前記捕獲空間内の獣類を捕獲するように構成されている、
請求項1乃至4の何れかに記載の獣類捕獲装置。
【請求項6】
前記檻部は、複数の側面ユニットと、複数の連結部材と、を有し、
前記複数の側面ユニットが、前記連結部材を用いて互いに連結自在に構成されており、
前記複数の側面ユニットが一定の領域を囲むように横方向に並べられ、隣り合う前記側面ユニット同士が前記連結部材を用いて連結されることにより、前記捕獲空間を形成する、
請求項1乃至5の何れかに記載の獣類捕獲装置。
【請求項1】
獣類を捕獲するための捕獲空間を具備する檻部と、
前記捕獲空間への獣類の入出が可能なように前記檻部の側面に設けられる複数の開口部と、
前記捕獲空間内の獣類の頭数を検知する、頭数検知手段と、
前記頭数検知手段により検知される獣類の頭数が、予め設定される捕獲目標頭数以上となった場合に、前記捕獲空間内の獣類を捕獲する獣類捕獲手段と、
を備える、
獣類捕獲装置。
【請求項2】
前記頭数検知手段は、前記複数の開口部それぞれからの、前記捕獲空間への獣類の入出を検知することで、前記捕獲空間内の獣類の頭数を検知するように構成されている、
請求項1に記載の獣類捕獲装置。
【請求項3】
前記頭数検知手段が前記捕獲空間への獣類の入出を検知したとき、少なくとも当該獣類が進入したか退出したかを示す情報を含む入出情報を記録する記録部をさらに備える、
請求項2に記載の獣類捕獲装置。
【請求項4】
前記頭数検知手段により検知される獣類の頭数に基づいて、前記獣類捕獲手段により、前記捕獲空間内の獣類の捕獲を行う、第1の動作モードと、
前記獣類捕獲手段による前記捕獲空間内の獣類の捕獲を行わずに、前記記録部への入出情報の記録を行う、第2の動作モードと、
を選択的に実行可能なように構成されている、
請求項3に記載の獣類捕獲装置。
【請求項5】
前記獣類捕獲手段は、前記複数の開口部を閉鎖することで、前記捕獲空間内の獣類を捕獲するように構成されている、
請求項1乃至4の何れかに記載の獣類捕獲装置。
【請求項6】
前記檻部は、複数の側面ユニットと、複数の連結部材と、を有し、
前記複数の側面ユニットが、前記連結部材を用いて互いに連結自在に構成されており、
前記複数の側面ユニットが一定の領域を囲むように横方向に並べられ、隣り合う前記側面ユニット同士が前記連結部材を用いて連結されることにより、前記捕獲空間を形成する、
請求項1乃至5の何れかに記載の獣類捕獲装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−90594(P2013−90594A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234506(P2011−234506)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(511227990)竹森鐵工株式会社 (1)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(511227990)竹森鐵工株式会社 (1)
【Fターム(参考)】
[ Back to top ]