
玉型形状測定装置及び玉型形状測定方法
【課題】フィーラがレンズ枠の溝又は型板の周縁に当接する際、フィーラが停止してしまうのを防止しつつ、レンズ枠又は型板への衝撃を弱め、レンズ枠又は型板の破損を防止する玉型形状測定装置及び玉型形状測定方法を提供すること。
【解決手段】眼鏡枠(レンズ枠)LF(RF)の溝又は型板の周縁に向かって接触子(フィーラ)37の移動量を検出し、検出された移動量に応じた移動速度が緩慢になるように、接触子37の移動量を制御することで、眼鏡枠LF(RF)又は型板への衝撃を弱め、眼鏡枠LF(RF)又は型板の破損を防止することができる。
【解決手段】眼鏡枠(レンズ枠)LF(RF)の溝又は型板の周縁に向かって接触子(フィーラ)37の移動量を検出し、検出された移動量に応じた移動速度が緩慢になるように、接触子37の移動量を制御することで、眼鏡枠LF(RF)又は型板への衝撃を弱め、眼鏡枠LF(RF)又は型板の破損を防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、玉型形状測定装置及び玉型形状測定方法に関し、詳細には、眼鏡のレンズ枠などの玉型(型板、パターン、デモレンズなどを含む)形状を測定する玉板形状測定装置及び玉型形状測定方法に関するものである。
【背景技術】
【0002】
従来から、例えば特許文献1又は2に示すように、レンズ枠にフィーラ(接触子、測定子、スタイラス)を当接させて、レンズ枠の形状を測定する際に、フィーラの回転方向、回転速度を可変にすることにより、細いレンズ枠や、いわゆるカニ眼レンズ枠などのレンズ枠が変形しないようにしたレンズ枠形状測定装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−36084号公報
【特許文献2】特開2002−98518号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、フィーラを回転させる前に眼鏡レンズ枠又は型板などに向けてフィーラを当接させる際、フィーラを、レンズ枠又は型板に向けて移動速度を変えることなく直線的に移動させてレンズ枠の溝又は型板の周縁にフィーラを当接させるため、このときレンズ枠又は型板が破損してしまう可能性があった。
【0005】
また、フィーラを、DCモータ等を利用してレンズ枠の溝にセット(当接)する際、フィーラを移動させるための摩擦に打ち勝つだけの力量を与えると、フィーラの移動速度が速すぎてしまい、レンズ枠の溝にフィーラが突き当たったとき、フィーラがレンズ枠から跳ね返ってバウンドするなどの問題があった。
【0006】
一方、フィーラがレンズ枠からバウンドをしないようにフィーラを静かに移動させると、移動の際の摩擦に打ち勝つことができず、フィーラが途中で止まってしまう問題があった。
【0007】
このような問題は、型板の形状を測定する型板測定用フィーラにおいても同様であり、型板測定用フィーラが型板の周縁に当たって跳ね返る問題があった。
【0008】
そこで、本発明では、前記問題を解決した玉型形状測定装置及び玉型形状測定方法を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明に係る玉型形状測定装置は、フィーラと、前記フィーラがレンズ枠の溝又は型板の周縁に向かって移動する際の、前記フィーラの単位時間当たりの移動量を検出する移動量検出手段と、前記移動量検出手段により検出された前記単位時間当たりの移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御する制御手段と、を有することを特徴とする。
【0010】
ここで、「移動速度が緩慢に」とは、フィーラがレンズ枠の溝又は型板の周縁に当接した際に、レンズ枠や型板が破損しない程度であって、移動の際の摩擦に打ち勝つ程度の範囲の速度であることを意味する。
【0011】
これにより、フィーラが停止してしまうのを防止しつつ、レンズ枠又は前記型板への衝撃を弱め、レンズ枠又は前記型板の破損を防止することができる。
【0012】
また、本発明に係る玉型形状測定装置において、前記制御手段は、前記移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする。
【0013】
これにより、フィーラの移動速度が速いことによるフィーラのレンズ枠又は型板からの跳ね返りを防止することができる。
【0014】
ここで、「第1所定値」とは、フィーラがレンズ枠の溝や型板の周縁に当接した際に、レンズ枠や型板が破損しない上限の速度である。
【0015】
さらに、本発明に係る玉型形状測定装置において、前記制御手段は、前記移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする。
【0016】
ここで、「第2所定値」とは、フィーラが移動するときに生じる移動摩擦に打ち勝つ最低限の速度を意味する。
【0017】
これにより、移動摩擦によりフィーラが途中で止まってしまうことを防止することができる。
【0018】
そして、本発明に係る玉型形状測定装置において、前記制御手段は、前記移動量検出手段が、前記移動速度を所定時間以上検出しない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする。
【0019】
これにより、フィーラがレンズ枠の溝又は型板の周縁に当接する前に止まってしまうことを防ぐことができる。
【0020】
また、本発明に係る玉型形状測定装置において、前記フィーラを移動させるDCモータを有し、前記制御手段は、前記DCモータへ供給する電流の制御することにより、前記フィーラの移動速度を制御することを特徴とする。
【0021】
これにより、複雑な構成を用いることなくフィーラの移動の制御を行うことができる。
【0022】
また、本発明に係る玉型形状測定方法は、レンズ枠の溝又は型板の周縁に向かって移動するフィーラの単位時間当たりの移動量を検出し、検出された前記移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御することを特徴とする。
【0023】
これにより、レンズ枠又は前記型板への衝撃を弱め、レンズ枠又は前記型板の破損を防止することができる。
【0024】
さらに、本発明に係る玉型形状測定方法において、検出された前記フィーラの移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする。
【0025】
これにより、フィーラの移動速度が速いことによるフィーラのレンズ枠又は型板からの跳ね返りを防止することができる。
【0026】
そして、本発明に係る玉型形状測定方法において、検出された前記フィーラの移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする。
【0027】
これにより、移動摩擦によりフィーラが途中で止まってしまうことを防止することができる。
【0028】
また、本発明に係る玉型形状測定方法において、前記フィーラの移動速度が所定時間以上検出されない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする。
【0029】
これにより、フィーラがレンズ枠の溝又は型板の周縁に当接する前に止まってしまうことを防ぐことができる。
【0030】
さらに、本発明に係る玉型形状測定方法において、前記フィーラを移動させるDCモータへ供給する電流の制御することにより、前記フィーラの移動を制御することを特徴とする。
【0031】
これにより、複雑な構成を用いることなくフィーラの移動の制御を行うことができる。
【0032】
また、本発明に係る玉型形状測定装置及び玉型形状測定方法は、レンズ枠の溝又は型板の周縁にセットする際のレンズ枠形状用又は型板測定用のフィーラの移動中の単位時間当たりの移動量(移動速度)をチェックし、フィーラの移動速度が速すぎる場合は、移動モータの電流を落として移動速度を遅くし、移動速度が遅くなったときは、摩擦により止まってしまう可能性があるため、移動モータの電流を上げて、摩擦により止まらないよう、フィーラの移動速度を速めるよう制御することができる装置・方法であり、眼鏡レンズ枠又は型板にフィーラを当接させる際に、前記フィーラの移動速度を緩慢にし、前記レンズ枠の溝又は前記型板の周縁にゆっくりと係合し、前記レンズ枠又は前記型板への衝撃を弱めるように作用することを特徴とする。
【0033】
これにより、レンズ枠又は前記型板への衝撃を弱め、レンズ枠又は前記型板の破損を防止することができる。
【0034】
また、本発明に係る玉型形状測定装置及び玉型形状測定方法は、フィーラが前後方向に移動する機構であって、その移動方法をモータ等を利用して移動させる際に、前記フィーラの移動速度が一定以上にならないように単位時間当たりの移動量を監視し、あらかじめ設定された速度に達したときは、前記モータの電流等を制御し、前記移動速度を一定になるように電流を制御する制御手段を有することを特徴とする。
【0035】
これにより、フィーラの前後方向の移動速度を一定にし、移動速度が速いことによるフィーラのレンズ枠又は型板からの跳ね返りを防止し、かつ、移動摩擦によりフィーラが途中で止まってしまうことを防止することができる。
【0036】
また、本発明に係る玉型形状測定装置及び玉型形状測定方法は、フィーラの移動速度を監視し、一定時間以上移動量が検出されなかった場合、前記フィーラがレンズ枠の溝に入ったかどうか又は型板の周縁に当接したのかどうかを確認し、次の測定動作に移行するかどうか判断する判断手段を有することを特徴とする。
【0037】
これにより、フィーラがレンズ枠の溝に入る前に次の測定動作に移行してしまうことを防止できる。
【発明の効果】
【0038】
本発明に係る玉型形状測定装置及び玉型形状測定方法によれば、フィーラの移動速度を緩慢にし、レンズ枠又は型板への衝撃を弱めるように作用させるために、レンズ枠の溝又は型板の周縁にゆっくりと係合させることができ、レンズ枠又は型板が破損してしまう可能性を軽減させることができる。
【0039】
また、レンズ枠測定用又は型板測定用のフィーラがレンズ枠の溝又は型板の周縁から跳ね返ってバウンドすることなく、かつ、フィーラの移動摩擦により止まることなく、フィーラの移動速度を制御することができる。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態である眼鏡枠測定装置の一部を示す部分概略斜視図である。
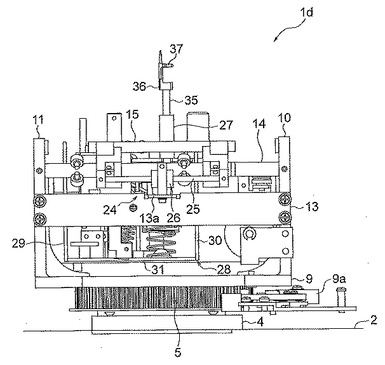
【図2】図1の眼鏡枠測定装置の測定機構の斜視図である。
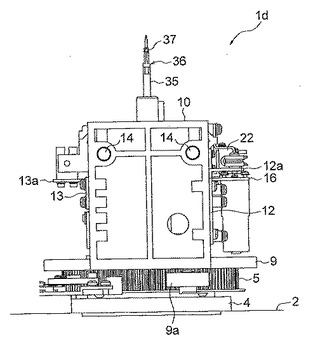
【図3】図2の測定機構の正面図である。
【図4】図2の測定機構の背面図である。
【図5】図2の測定機構の右側面図である。
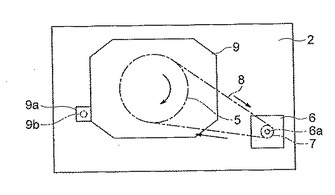
【図6】図2の測定機構の回転ベースの駆動手段を示す模式図である。
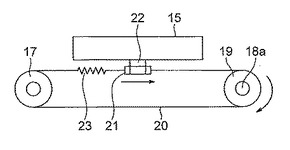
【図7】図2のスライダの駆動機構を説明するための模式図である。
【図8】図7の平面図である。
【図9】図2のスライダの原点位置を検出する手段を示す概略説明図である。
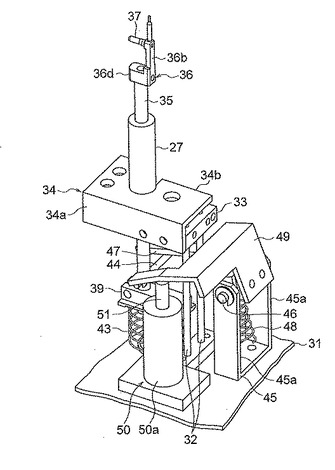
【図10】図2の接触子の昇降機構を示す斜視図である。
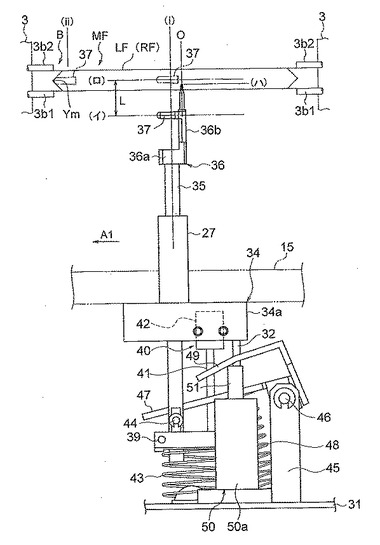
【図11】図10の昇降機構による眼鏡枠の測定のための説明図である。
【図12】図11の左側面図である。
【図13】図1に示した眼鏡枠測定装置の制御回路図である。
【図14】本発明の一実施形態である眼鏡枠測定装置の接触子の内部構成を示す部分拡大断面図である。
【図15】本発明の一実施形態である眼鏡枠測定装置の移動制御手段による制御機構回路図である。
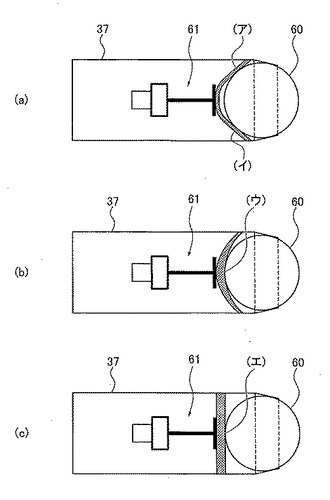
【図16】(a)〜(c)は、その他の実施形態である眼鏡枠測定装置の接触子の内部構成を示す部分拡大断面図である。
【発明を実施するための形態】
【0041】
まず、本発明の玉型形状測定装置の前提となる形態について、図面を参照して説明する。
[玉型形状測定装置全体の構成]
図1は、本発明の一実施形態である眼鏡枠測定装置100(玉型形状測定装置)の一部を示す部分概略斜視図である。また、図2は、図1に示した眼鏡枠測定装置100の測定機構を示す斜視図である。
【0042】
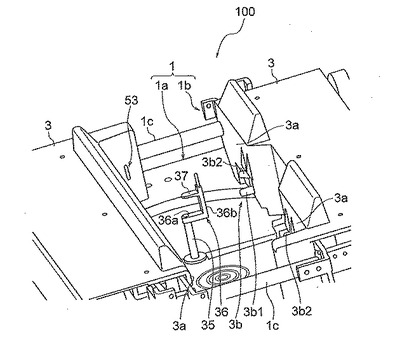
図1において、眼鏡枠測定装置100は、測定装置本体1を有する。この測定装置本体1は、測定機構収納用のケース部1aと、眼鏡枠(レンズ枠)を保持する眼鏡枠保持機構1bとを備え、ケース部1a内の底部には、図2に示したベース2が設けられている。
【0043】
また、眼鏡枠保持機構1bは、ケース部1aに固定された一対の平行なガイドロッド1c,1cを有する。そして、このガイドロッド1c,1cにはスライド枠3,3が相対接近・離反可能に保持されている。このスライド枠3,3は、図示しないコイルスプリング等で互いに接近する方向にバネ付勢されている。
【0044】
また、スライド枠3,3は、眼鏡枠(図示せず)が当接させられる、互いに対向した縦壁3a,3aを有すると共に、この眼鏡枠を保持させる眼鏡枠保持手段3bを有する。
【0045】
この眼鏡枠保持手段3bは、縦壁3aから突出する下部側の保持棒3b1と、保持棒3b1に対して上側から開閉可能にスライド枠3に取り付けられた上側の保持棒3b2とを有する。この眼鏡枠保持手段3bは、図示しない眼鏡の左右の眼鏡枠に対応してそれぞれ設けられる。なお、このような眼鏡枠保持機構1bとしては、例えば、特開平10−328992号公報等に開示された構成、又はその他周知の技術を採用することができる。したがって、眼鏡枠保持機構1bの詳細な説明は省略する。
【0046】
また、ベース2上には、図2〜図5に示すように、測定機構1dが設けられている。この測定機構1dは、ベース2上に固定されたベース支持部材4を有する。このベース支持部材4には、大径の従動ギヤ5が、鉛直軸を中心とする水平回転自在に取り付けられている。また、ベース2には、図6に模式的に示した駆動モータ6(接触子制御手段)が取り付けられている。この駆動モータ6の出力軸6aには、ピニオン7が固定され、このピニオン7と従動ギヤ5とには、タイミングベルト8が掛け渡されている。
【0047】
そして、駆動モータ6を作動させると、駆動モータ6の出力軸6aの回転がピニオン7
及びタイミングベルト8を介して従動ギヤ5に伝達されて、従動ギヤ5が回転させられる
ようになっている。なお、駆動モータ6としては、例えば、2相ステッピングモータ等が用いられている。
【0048】
従動ギヤ5には、図2に示すように、その上部に回転ベース9が一体に固定されている。この回転ベース9には、回転の基準位置(原点、位置)を検出するフォトセンサ9aが取り付けられ、ベース2上には、回転の基準位置を支持する発光手段9bが配設され、この発光手段9bから線状又は点状の光束を原点マークとして上方に向けて照射し、この原点マークとしての光束をフォトセンサ9aが検出したときに、回転ベース9の水平回転の基準位置を検出することができる。なお、原点を検出する装置としては、透過型のフォトセンサや反射型のフォトセンサ或いは近接センサ等の周知の技術を採用することができる。
【0049】
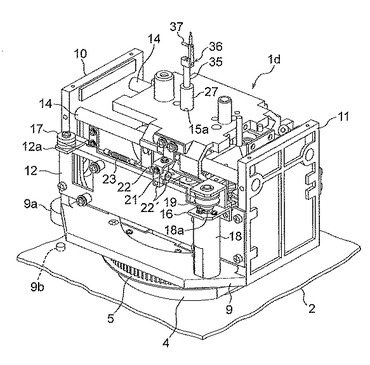
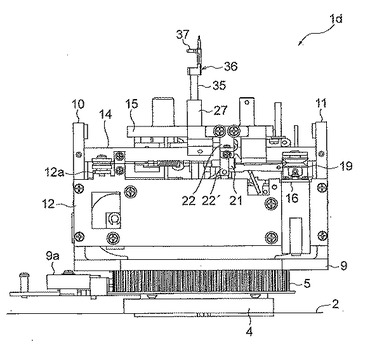
さらに、回転ベース9の長手方向両端部には、図3に示すように、上下に延び、且つ互いに対向する平行なレール取付板10,11が一体に固定され、レール取付板10の一側部とレール取付板11の一側部には、側板12の長手方向端部がそれぞれ固定され、図4に示すように、レール取付板10の他側部とレール取付板11の他側部には、側板13の長手方向端部がそれぞれ固定されている。
【0050】
対向するレール取付板10,11の上部間には、図4に示すように、互いに平行で、且つ軸状の一対のガイドレール14,14が水平に配設されている。この各ガイドレール14,14の両端部は、レール取付板10,11に固定されていて、ガイドレール14,14には、スライダ15がこれらガイドレール14,14の長手方向に沿って進退移動可能に保持されている。
【0051】
さらに、側板12には、図2及び図3に示すように、レール取付板10に近接させて、かつ側板12の側方に向けて水平に突出するプーリ支持板部12aが、折曲げにより一体に形成されていると共に、レール取付板11に近接させて、かつ側板12の側方に向けて水平に突出するモータ取付用のブラケット16が固定されている。
【0052】
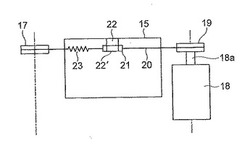
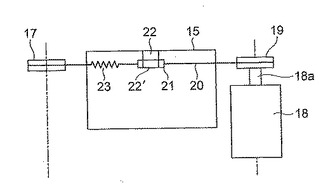
そして、プーリ支持板部12aには、図2に示すように、従動プーリ17が上下に延びる軸線を中心として水平回転自在に取り付けられ、ブラケット16には、スライダ移動用の駆動モータ18(接触子移動制御手段、押圧制御モータ)の上端部が固定されている。この駆動モータ18としては、例えば、DCモータ等が用いられている。また、この駆動モータ18は、出力軸18aの軸線が上下に延びていて、この出力軸18aには、図7及び図8に示すように、駆動プーリ19が取り付けられている。
【0053】
これら両プーリ17,19には、ワイヤ20が掛け渡され、このワイヤ20の一端部は、軸状のワイヤ保持部材21に保持されている。このワイヤ保持部材21は、ブラケット22,22′を介してスライダ15に固定されている。また、ワイヤ20の両端部は、コイルスプリング23を介して連結され、全体として環状とされている。これにより、駆動モータ18を正転または逆転させると、出力軸18a及び駆動プーリ19が正転または逆転させられて、これら出力軸18aおよびプーリ19に架け渡されたワイヤ20が変位することにより、スライダ15が図3中左又は右に移動させられるようになっている。
【0054】
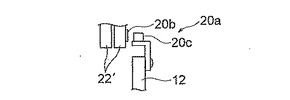
ブラケット22′と側板12との間には、図9に示すように、スライダ15の移動位置(移動量)の基準位置(原点)を検出するための原点センサ20aが設けられている。この原点センサ20aとしては、例えば、反射型のフォトセンサ等を用いている。この原点センサ20aは、上下に延びたスリット状の反射面(図示せず)が設けられた反射板20bを有すると共に、発光素子と受光素子を備えた反射型のフォトセンサ20cを有する。
【0055】
そして、反射板20bはブラケット22′に設けられ、フォトセンサ20cは側板12に設けられている。なお、原点センサ20aとしては、透過型のフォトセンサや近接センサ等の周知の技術を採用することもできる。
【0056】
側板13の長手方向中央部には、図4に示すように、側方に向けて水平に突出する支持板部13aが一体に折曲げにより形成されている。この側板13とスライダ15との間には、ガイドレール14の延びる方向(水平方向)へのスライダ15の移動位置を検出するリニアスケール24(位置検出手段)が動径検出センサとして設けられている。
【0057】
このリニアスケール24は、ガイドレール14と平行にスライダ15に保持され、ガイドレール14に沿った方向への位置情報が表された軸状のメインスケール25と、支持板部13aに固定されて、メインスケール25に表されている位置情報を読み取る検出ヘッド26とを備えている。
【0058】
この検出ヘッド26は、メインスケール25の位置情報を読み取ることで、スライダ15の水平方向への移動位置(制御位置情報)を検出するようになっている。リニアスケール24としては、例えば、周知の磁気式のものや光学式のものを用いることができる。例えば、磁気式の場合、メインスケール25の長手方向に沿って、磁極S,Nの磁気パターンを位置情報として交互に微小間隔で設け、この磁気パターンを検出ヘッド26で検出することにより、スライダ15の移動量(移動位置)を検出することができる。
【0059】
また、光学式の場合、メインスケール25を板状に形成し、且つこのメインスケール25の長手方向に沿って、微小間隔のスリットを設け、メインスケール25を挟むように発光素子と受光素子とを配設すると共に、発光素子からの光をメインスケール25のスリットを介して受光素子により検出して、通過したスリットの数を求めることにより、スライダ15の移動量(移動位置)を検出することができる。
【0060】
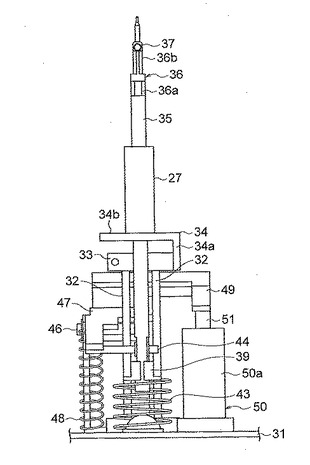
スライダ15の略中央部には、図2に示すように、貫通孔15aが形成され、この貫通孔15aには、上下に延びるガイド筒27が挿通されている。このスライダ15の下方には、図4に示すように、支持枠28が配設されている。この支持枠28は、上端部がスライダ15に保持された縦フレーム29,30と、縦フレーム29,30の下端部に固定された横板31とを備えている。
【0061】
横板31には、図12に示すように、上下に延び且つ互いに平行に設けられた軸状の一対の支持部材32,32の下端部が固定されている。この支持部材32,32の上端部には、保持部材33が固定され、この保持部材33には、側面形状がL字状に形成されたガイド支持部材34の縦壁34aが固定されている。このガイド支持部材34の横壁34b上にはガイド筒27の下端部が固定されている。
【0062】
そして、ガイド筒27には、上下に延びる接触子軸35が上下動自在に嵌合保持され、
接触子軸35の上端部には、接触子取付部材36が一体に設けられている。この接触子取
付部材36は、接触子軸35の上端部に垂直に取り付けられた取付部36aと、取付部3
6aから上方に延びる垂直部36bとから形成され、これらはL字状に形成されている。この垂直部36bの上端部には、取付部36aと平行に延びた接触子(フィーラ)37が一体に設けられている。
【0063】
接触子軸35の下端部には、図10〜図12に示すように、ブラケット39が固定されている。そして、ブラケット39とガイド支持部材34との間には、図11に示すように、
上下方向の移動位置(=Z軸値)を検出するリニアスケール40が、高さ検出センサとして設けられている。
【0064】
このリニアスケール40は、接触子軸35と平行に配設された、上下方向の移動位置が表された軸状のメインスケール41と、メインスケール41の上下方向への移動量(移動位置)を検出し、この検出結果に基づいて接触子37の上下方向への移動位置を検出する検出ヘッド42を備えている。メインスケール41は、上端部が保持部材33に固定され、且つ下端部がブラケット39に固定(又は保持)されている。また、検出ヘッド42は、保持部材33に保持されている。このリニアスケール40も、上述したリニアスケール24と同様に、磁気式又は光学式のものを採用することができる。
【0065】
ブラケット39と横板31との間には、図10〜図12に示すように、接触子軸35を上方に向けてバネ付勢するコイルスプリング43が設けられている。さらに、接触子軸3
5の下端部近傍には、ブラケット39の上方に位置し、且つ接触子軸35と直交する係合
軸44が取り付けられている。
【0066】
また、横板31上には、図10に示すように、U字状に形成したブラケット45が固定され、このブラケット45の対向壁45a,45aには、支持軸46の両端部が軸線回りに回動可能に保持され、この支持軸46に押さえレバー47が固定されている。
【0067】
この押さえレバー47は、係合軸44の上部に当接させられている。そして、この押さえレバー47と横板31との間には、レバー引き下げ用の引張りコイルスプリング48が設けられている。この引張りコイルスプリング48の引張りバネ力(弾性係数)は、コイルスプリング43のバネ力(弾性係数)よりも大きく設定されている。
【0068】
また、支持軸46には、上昇位置規制レバー49が固定されている。この上昇位置規制
レバー49は、押さえレバー47による係合軸44の上昇限度を規制して、接触子軸35
及び接触子37の上昇位置を規定するのに用いられる。この上昇位置規制レバー49は、押さえレバー47と同方向に延びている。
【0069】
そして、この上昇位置規制レバー49の下方には、アクチュエータモータ50が配設さ
れている。このアクチュエータモータ50は、横板31上に固定されたモータ本体50a
と、このモータ本体50aから上方に向けて突出し、且つ軸線が接触子軸35と平行に設
けられたシャフト51とを有する。そして、このシャフト51の上端には、上昇位置規制レバー49が引張りコイルスプリング48の引張りバネ力により当接させられている。
【0070】
アクチュエータモータ50としては、DCモータ等が用いられる。この、アクチュエータモータ50は、正転させることによりシャフト51が上方に移動し、逆転させることによりシャフト51が下方に移動するようになっている。
【0071】
なお、コイルスプリング43,支持軸46,押さえレバー47,引張りコイルスプリング48,上昇位置規制レバー49およびアクチュエータモータ50等は、接触子37を昇降させる昇降機構を構成している。
<制御回路>
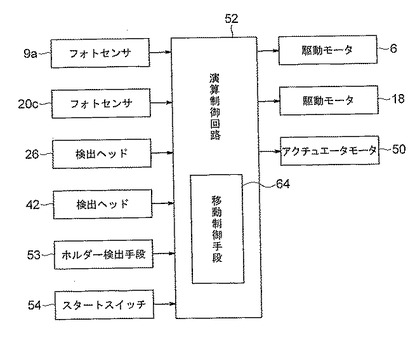
図13に示すように、フォトセンサ9aからの回転ベース9の回転方向原点位置検出信号と、フォトセンサ20cからのスライダ15の動径方向原点位置検出信号と、リニアスケール24の検出ヘッド26からの上下方向移動量検出信号と、リニアスケール40の検出ヘッド42からのZ軸移動量検出信号が、それぞれ演算制御回路52に入力されるようになっている。また、この演算制御回路52は、駆動モータ6,18およびアクチュエータモータ50を作動制御するようになっている。
【0072】
スライド枠3,3の一方の側壁には、図1に示したように、眼鏡枠の保持を検出するホルダー検出手段53が設けられている。このホルダー検出手段53には、マクロスイッチ等が用いられていて、このホルダー検出手段53のマクロスイッチからの検出信号は、図13に示したように演算制御回路52(移動制御手段64、演算手段)に入力されるようになっている。図中の符号54は測定開始用のスタートスイッチである。
[玉型形状測定装置全体の作用]
この眼鏡枠測定装置100で眼鏡枠の形状測定を行う前は、アクチュエータモータ50のシャフト51の上端が図10〜図12に示したように最下端に位置している。この位置では押さえレバー47が、コイルスプリング43よりもバネ力の強い引張りコイルスプリング48によって、係合軸44を介して接触子軸35を下方に押し下げている。これにより、接触子37は最下端に位置させられている。
【0073】
この状態の眼鏡枠測定装置100で眼鏡枠の形状測定を行う場合には、例えば特開平10−328992号公報におけるように、図11に示した眼鏡枠の左(右)の眼鏡枠LF(RF)を図11の如く保持棒3b1,3b2間で挟持させる。この保持の仕方は特開平10−328992号公報と同様である。
【0074】
また、この保持棒3b1,3b2間に保持された眼鏡枠LF(RF)は、図11に示したように測定開始前の状態では接触子37よりも上方に位置するように設定されている。即ち、接触子37は、眼鏡枠LF(RF)よりも下方の初期位置(イ)に位置させられている。しかも、図11に示したように、接触子37は、保持棒3b1,3b2間に保持された眼鏡枠LF(RF)の略中央の初期位置(i)に位置されている。
【0075】
この位置では、フォトセンサ9aが発光手段9bからの光束から回転ベース9の回転方向の原点を検出し、原点センサ20aがスライダ15の動径方向の原点を検出している状態となっている。
【0076】
なお、眼鏡枠が三次元に湾曲していても、眼鏡枠の保持棒3b1,3b2による眼鏡枠の保持された部分は他の部分よりも最も低く設定した高さとなる。この保持された部分では、眼鏡枠LF(RF)のヤゲン溝Ymの高さも設定した高さとなり、眼鏡枠の形状測定開始位置Bとなる。
【0077】
この状態から図13のスタートスイッチ54をオンに切り替えられると、演算制御回路52はアクチュエータモータ50を正転させて、図11の位置からシャフト51を所定量だけ上昇させる。この際、シャフト51は、上昇位置規制レバー49の自由端部を引張りコイルスプリング48のバネ力に抗して上方に所定量持ち上げて、上昇位置規制レバー49を支持軸46と一体に回動させる。
【0078】
これに伴い、押さえレバー47は、支持軸46と一体に回動して、自由端部が上方に所定量上昇させられる。そして、この押さえレバー47の自由端部の上昇により、係合軸44がコイルスプリング43のバネ力により押さえレバー47の自由端部に追従して上昇させられ、接触子軸35が所定量上昇させられる。
【0079】
この接触子軸35の上昇量、即ちアクチュエータモータ50によるシャフト51の上方への上昇量は、接触子37の先端が図11の初期位置(イ)から上述した形状測定開始位置Bのヤゲン溝Ymに臨む高さ(ロ)まで上昇する量Lとなる。
【0080】
そして、演算制御回路52は、駆動モータ18を駆動制御して駆動プーリ19を回転させ、図2、図7のワイヤー20によりスライダ15をガイドレール14に沿って移動させる。この際、スライダ15は図11の矢印A1方向に移動させられる。この移動は、接触子37の先端が形状測定開始位置Bでヤゲン溝Ymに当接させられるまで行われる。しかも、接触子37の先端がヤゲン溝Ymに当接した状態では、接触子37はヤゲン溝Ymにコイルスプリング23のバネ力で弾接させられる。この状態で、駆動モータ18が停止される。
【0081】
なお、接触子37の先端がヤゲン溝Ymに当接したときには、駆動モータ18にかかる負荷が増大するので、この電流変化を検出することで、接触子37の先端がヤゲン溝Ymに当接したのを検出して、駆動モータ18を停止させることもできるが、本実施形態の眼鏡枠測定装置100では、後述する構成によって駆動モータ18を制御している。
【0082】
この後、演算制御回路52は、さらにアクチュエータモータ50を正転させて、所定量だけ上昇させる。この際、シャフト51は、上昇位置規制レバー49の自由端部を引張りコイルスプリング48のバネ力に抗して上方に所定量持ち上げて、上昇位置規制レバー49を支持軸46と一体に回動させる。
【0083】
これに伴い、押さえレバー47は、支持軸46と一体に回動して、自由端部が上方に所定量上昇させられ、押さえレバー47の自由端部が係合軸44から所定量離反させられ、接触子軸35が上方に変移可能となる。
【0084】
次に、演算制御回路52は、駆動モータ6を駆動制御して、駆動モータ6を正転させる。この駆動モータ6の回転は、ピニオン7,タイミングベルト8を介して従動ギヤ5に伝達され、従動ギヤ5が回転ベース9と一体に水平回転させられる(図6参照)。
【0085】
この回転ベース9の回転に伴い、スライダ15及びこのスライダ15に設けられた多数の部品が回転ベース9と一体に水平回転し、接触子37の先端がヤゲン溝Ymに沿って摺動移動する。
【0086】
この際、スライダ15が接触子37と一体にガイドレール14に沿って移動するので、スライダ15の原点位置からスライダ15が移動したときの移動量は、接触子37の先端の移動量と同じになる。この移動量は、リニアスケール24の検出ヘッド26の検出信号に基づいて演算制御回路52により求められる。
【0087】
しかも、接触子軸35の中心から接触子37の先端までの寸法(長さ)は既知であるので、スライダ15が原点にあるときの回転ベース9の回転中心から接触子37の先端までの距離を予め設定しておくことで、スライダ15がガイドレール14に沿って移動したときにおいて、回転ベース9の回転中心から接触子37の先端までの距離が変化しても、この距離の変化を動径値ρiとすることができる。
【0088】
したがって、駆動モータ6の回転による回転ベース9の回転角度位値θiを、回転方向の位置検出手段としての演算制御回路52が、駆動モータ6の駆動パルス数から求め、この回転角度位値θiにそれぞれ対応する動径値ρiを求めることで、演算手段としての演算制御回路52が、眼鏡枠LF(RF)のヤゲン溝Ymの周方向に沿った輪郭形状(眼鏡枠形状)を、極座標形式の眼鏡枠形状情報(θi,ρi)として求めることができる。
【0089】
また、接触子37の先端がヤゲン溝Ymに沿って摺接移動する際、眼鏡枠LF(RF)に上下方向の湾曲がある場合、この上下方向への湾曲状態は、リニアスケール40の検出ヘッド42の検出信号から演算制御回路52により上下方向の変位量として求められる。この上下方向への変位量は、Z軸値Ziとなる。
【0090】
従って、眼鏡枠LF(RF)の眼鏡枠形状は、演算制御回路52により三次元の眼鏡枠形状情報(θi,ρi,Zi)として求められる。
[接触子内部の構成]
ここで、上述した一実施形態の眼鏡枠測定装置100における接触子37の詳細な構成を図14に基づき説明する。
【0091】
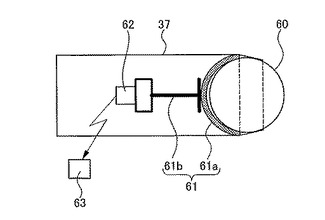
図14に示すように、接触子37は、先端に球状部材60を回転自在に抱持しており、接触子37の内部には、球状部材60と接するように設けられた、球状部材60に作用する圧力を検出する圧力検出手段61が組み込まれている。この圧力検出手段61は、ダイアフラム61aと、ダイアフラム61aの動きを圧力として検出する圧力検出部61bとを有する。
【0092】
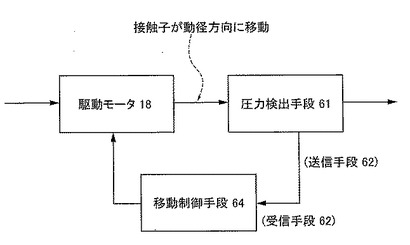
また、接触子37は、圧力検出手段61により検出された接触子37の先端(球状部材60)にかかる圧力を押圧力情報として送信する送信手段62を内部に備えている。さらに、演算制御回路52は、送信手段62により送信された押圧力情報を受信する受信手段63を有すると共に、受信手段63によって受信された押圧力情報が表す圧力が一定の圧力となるように、駆動モータ18による接触子37の動径方向への移動を制御する移動制御手段64の機能を有している。
【0093】
なお、圧力検出手段61と移動制御手段64(演算制御回路52)との間の押圧力情報の送受信は、送信手段62と受信手段63とによる無線によるものに限定されるものではなく、通常の電線を用いた有線での送受信であってもよい。この場合、送信手段62と受信手段63とを省略した構成とすることができる。
[接触子の作用]
次に、本実施形態に係る眼鏡枠測定装置100の作用について説明する。
【0094】
眼鏡枠LF(RF)の輪郭形状を測定する際、駆動モータ6による回転ベース9の回転に伴い、スライダ15及びこのスライダ15に設けられた多数の部品が回転ベース9と一体に水平面内回転し、一方、駆動モータ18の回転によるスライダ15の動径方向への移動により、接触子37の先端がヤゲン溝Ymに沿って摺接移動する。このとき、接触子37の先端は、ヤゲン溝Ymとの摺動によって、回転ベース9の回転方向と反対の向きに回転モーメントを受ける。
【0095】
しかし、本実施形態の眼鏡枠測定装置100は、接触子37の先端に回転自在に設けられた球状部材60が回転することにより、摺動抵抗を低減するため、この回転モーメントを小さくすることができる。
【0096】
また、眼鏡枠LF(RF)の輪郭形状を測定する際、球状部材60は眼鏡枠LF(RF)のヤゲン溝Ymと接する反力として眼鏡枠LF(RF)から押圧力を受ける。この球状部材60にかかる押圧力は、図15に示すように、圧力検出手段61によりが検出される。この検出された押圧力は圧力検出手段61によって電気信号等の押圧力情報に変換され、送信手段62が、電線などの有線接続または電波などの無線接続(赤外線送信、無線LAN等)により、移動制御手段64に備えられた受信手段63に送信する。
【0097】
移動制御手段64(演算制御回路52)は、受信手段63によって受信された押圧力情報が、球状部材60とヤゲン溝Ymとが適切な一定の圧力で当接するように設定された規定値Rより小さい場合には、接触子37が眼鏡枠LF(RF)に近づく方向に移動するように駆動モータ18を正転させて、押圧力情報が規定値Rを維持するように駆動モータ18を制御する。反対に受信された圧力情報が規定値Rより大きい場合には、接触子37が眼鏡枠LF(RF)から離れる方向に移動するように駆動モータ18を逆転させて、押圧力情報が規定値Rを維持するように駆動モータ18を制御する。
【0098】
このように移動制御手段64は、接触子37の眼鏡枠方向に対する動き(動径方向に沿った移動)を制御することで、球状部材60が眼鏡枠LF(RF)から受ける押圧力を一定とするように調整する。
【0099】
以上のように本実施形態に係る眼鏡枠測定装置100によれば、眼鏡枠LF(RF)の輪郭形状の測定時に、接触子37の先端に回転自在に設けられた球状部材60が、回転方向とは反対の向きに回転することで、接触子37と眼鏡枠LF(RF)との間に生じる摺動抵抗を低減するため、接触子37及び眼鏡枠LF(RF)が受ける回転モーメントを軽減させることができる。
【0100】
つまり、球状部材60の回転により接触子37の動きを滑らかにすることができ、この結果、眼鏡枠LF(RF)と接触子37との間に生じる摺動抵抗を少なくし、接触子37の軸が撓んだり、折れたり、眼鏡枠LF(RF)の輪郭形状が歪んだりすることを防ぐことができる。
【0101】
また、球状部材60が眼鏡枠LF(RF)から受ける押圧力が一定となるように動径方向の移動量が調整されるため、眼鏡枠LF(RF)の輪郭形状測定時に眼鏡枠LF(RF)に対する押圧力が不足して、接触子37が、当接されている眼鏡枠LF(RF)のヤゲン溝Ymから外れてしまうことを防ぐことができる。
【0102】
さらに、接触子37の眼鏡枠LF(RF)に対する押圧力が過剰となり、接触子37や眼鏡枠LF(RF)の輪郭形状を変形させてしまうことを防ぐこともできる。
【0103】
なお、本実施形態に係る眼鏡枠測定装置100は、圧力検出手段61が接触子37の内部において球状部材60と接するように設けられているが、本発明に係る眼鏡枠測定装置はこの形態に限定されるものではなく、例えば、圧力検出手段61が球状部材60の内部に設けられた構成を採用することもできる。
【0104】
このように、圧力検出手段61を球状部材60の内部に設けた構成の眼鏡枠形状測定装置によっても、上述した実施形態の眼鏡枠形状測定装置100と同様の作用、効果を発揮することができる。
【0105】
また、図14は、圧力検出手段61が球状部材60に対して受け皿のように覆う構成であるが、この圧力検出手段61は、球状部材60が動径方向に押圧される力を検出できる形状であれば、図16(a)に示すように、2点(ア),(イ)のみで接していたり、図16(b),(c)に示すように、1点(ウ)または(エ)のみで接する形状であっても良い。
【0106】
なお、圧力検出手段61は、ダイアフラムのみならず、タッチセンサ、圧電素子、またはMEMS(マイクロ電気機械システム)を用いても良い。
【0107】
または、ダイアフラムを用いるものでは、ダイアフラムにひずみゲージを設置した圧力センサを適用することもできる。
【0108】
なお、本実施形態は、図11に示したように、引張りコイルスプリング48によって上昇位置規制レバー49を下方に付勢し、この付勢によって上昇位置規制レバー49と一体的に下方に付勢された押さえレバー47が係合軸44を下方に付勢することで、接触子37が設けられた接触子軸35の上昇を規制し、一方、アクチュエータモータ50を駆動させてシャフト51を上昇させることで、アクチュエータモータ50のシャフト51が引張りコイルスプリング48の付勢力に抗して上昇位置規制レバー49を上昇させると、上昇位置規制レバー49と一体的に押さえレバー47も上昇し、これにより、押さえレバー47による係合軸44の下方への拘束が解除されて、接触子37の上下方向への変位を自在とする構成であるが、接触子37の上下方向への変位の規制および解除を行う構成は、このような態様に限定されるものではない。
【0109】
すなわち、例えば、特開2002−122829号公報の図4〜図6に示されているような、パルスモータと、パルスモータの軸に設けられたピニオンギアと、ピニオンギアに噛合するラックとによって、接触子37の上下方向への変位の規制および解除を行う構成を採用することもできる。
【0110】
また、図7に示したようなモータ18およびワイヤー20による、接触子37を動径方向に駆動する構成に代えて、モータと上記ラックおよびピニオンギアの組み合わせとを用いた構成を適用することもできる。
【0111】
次に、本発明の玉型形状測定装置の中心となる形態について説明する。
【0112】
まず構成について説明する。
【0113】
本発明に係る眼鏡枠測定装置(玉型形状測定装置)100は、上記の前提となる構成に加えて、接触子(フィーラ)37の単位時間当たりの移動量を検出する移動量検出手段と、接触子37の移動を制御する制御手段と、を有している。
【0114】
制御手段は、移動量検出手段により検出された、眼鏡枠(レンズ枠)LF(RF)の溝に向かって移動する際の接触子37の移動量に応じた移動速度が緩慢になるように、接触子37の移動を制御する。
【0115】
また、制御手段は、接触子37の移動速度が、第1所定値以上である場合には移動速度を下げるように接触子37の移動を制御し、一方、第1所定値よりも低い値である第2所定値未満である場合には移動速度を上げるように接触子37の移動を制御する。
【0116】
なお、「第1所定値」とは、接触子37が眼鏡枠LF(RF)の溝に当接した際に眼鏡枠LF(RF)が破損しない上限の速度である。また、「第2所定値」とは、接触子37が移動するときに生じる移動摩擦に打ち勝つ最低限の速度である。
【0117】
さらに、制御手段は、移動量検出手段が、接触子37の移動量を所定時間以上検出しない場合には、接触子37が眼鏡枠LF(RF)の溝に当接したと判断し、接触子37の移動を終了させるように制御する。
【0118】
そして、これらの制御は、制御手段が駆動モータ(DCモータ)18へ供給する電流の制御することにより行う。
【0119】
次に作用について説明する。
【0120】
測定を開始する際には、あらかじめ設定されている電流値(第1所定値および第2所定値に対応する電流量)を駆動モータ18に設定する。
【0121】
また、移動量検出手段は、単位時間(例えば1mSec)ごとに接触子37に付随しているリニアスケール24を利用し、単位時間ごとの移動量を検出する。
【0122】
検出された移動量に応じた移動速度が、設定された第1所定値に対応する移動速度よりも速い場合は、接触子37の移動速度が速すぎると判断し、一定量電流値を落とし、移動速度を下げる。このとき、駆動モータ18へ供給する電流を停止させ、接触子37が惰性で移動するようにして、移動速度を下げるようすることも可能である。
【0123】
一方、検出された移動量が、設定された第2所定値に対応する移動速度よりも遅い場合は、移動の際の摩擦により接触子37の移動が止まる可能性があるため、一定量電流値を上げ、移動速度を上げていく。
【0124】
この場合、第1所定値は、例えば1秒当たり80〜100mmの移動量に対応する移動速度であり、第2所定値は、例えば1秒当たり10mm以下の移動量に対応する移動速度である。
【0125】
また、接触子37の移動速度は、例えば1秒当たり30mm〜50mm程度の移動量に対応する移動速度であるように制御されることが好ましい。
【0126】
このように、制御手段は、眼鏡枠LF(RF)に接触子37を当接する際に、接触子37の移動速度を緩慢にし、眼鏡枠LF(RF)の周縁にゆっくりと係合し、眼鏡枠LF(RF)への衝撃を弱めるように接触子37の制御を行う。
【0127】
そして、接触子37が眼鏡枠LF(RF)の周縁に当接した際には、移動量検出手段による移動量の検出が行われず、この移動量の検出が行われない時間が所定時間以上である場合には、制御手段は接触子37の移動を終了させる。
【0128】
以上のように、本発明に係る玉型形状測定装置100によれば、接触子37の移動速度が緩慢に、すなわち、接触子37が眼鏡枠LF(RF)の溝に当接した際に、眼鏡枠LF(RF)が破損しない程度であって、移動の際の摩擦に打ち勝つ程度の範囲の速度になるように制御されることにより、接触子37が停止しまうのを防止しつつ、当接する際の衝撃を弱めることができ、眼鏡枠LF(RF)の破損の防止を可能にすることができる。
【0129】
また、接触子37の移動速度が第1所定値以上である場合には移動速度を下げるように制御されることにより、接触子37が眼鏡枠LF(RF)に突き当たったとき、接触子37が眼鏡枠LF(RF)の周縁に当たって跳ね返ること防止することができる。
【0130】
さらに、接触子37の移動速度が第1所定値よりも低い値である第2所定値未満である場合には移動速度を上げるように制御されることにより、移動の際の摩擦などにより接触子37が途中で止まってしまうことを防止することができる。
【0131】
そして、移動量検出手段が、接触子37の移動量を所定時間以上検出しない場合には、接触子37が眼鏡枠LF(RF)の溝に当接したと判断し、接触子37の移動を終了させることにより、接触子37が眼鏡枠LF(RF)の溝に当接する前に止まってしまうことを防ぐことができる。
【0132】
また、駆動モータ(DCモータ)18へ供給する電流の制御することにより、接触子37の移動を制御することにより、複雑な構成を用いることなく接触子37の移動の制御を行うことができる。
【0133】
なお、本実施形態では眼鏡枠(レンズ枠)LF(RF)の形状を測定する場合について説明したが、本発明に係る玉型形状測定装置及び玉型形状測定方法は、この態様に限定されるものではなく、例えば、レンズ枠に限らず、型板、パターン又はデモレンズ等の玉型の形状測定において採用することもできる。
【符号の説明】
【0134】
15 スライダ
17 従動プーリ
18 駆動モータ
18a 出力軸
19 従動プーリ
20 ワイヤ
21 ワイヤ保持部材
22,22’ ブラケット
23 コイルスプリング
【技術分野】
【0001】
本発明は、玉型形状測定装置及び玉型形状測定方法に関し、詳細には、眼鏡のレンズ枠などの玉型(型板、パターン、デモレンズなどを含む)形状を測定する玉板形状測定装置及び玉型形状測定方法に関するものである。
【背景技術】
【0002】
従来から、例えば特許文献1又は2に示すように、レンズ枠にフィーラ(接触子、測定子、スタイラス)を当接させて、レンズ枠の形状を測定する際に、フィーラの回転方向、回転速度を可変にすることにより、細いレンズ枠や、いわゆるカニ眼レンズ枠などのレンズ枠が変形しないようにしたレンズ枠形状測定装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−36084号公報
【特許文献2】特開2002−98518号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、フィーラを回転させる前に眼鏡レンズ枠又は型板などに向けてフィーラを当接させる際、フィーラを、レンズ枠又は型板に向けて移動速度を変えることなく直線的に移動させてレンズ枠の溝又は型板の周縁にフィーラを当接させるため、このときレンズ枠又は型板が破損してしまう可能性があった。
【0005】
また、フィーラを、DCモータ等を利用してレンズ枠の溝にセット(当接)する際、フィーラを移動させるための摩擦に打ち勝つだけの力量を与えると、フィーラの移動速度が速すぎてしまい、レンズ枠の溝にフィーラが突き当たったとき、フィーラがレンズ枠から跳ね返ってバウンドするなどの問題があった。
【0006】
一方、フィーラがレンズ枠からバウンドをしないようにフィーラを静かに移動させると、移動の際の摩擦に打ち勝つことができず、フィーラが途中で止まってしまう問題があった。
【0007】
このような問題は、型板の形状を測定する型板測定用フィーラにおいても同様であり、型板測定用フィーラが型板の周縁に当たって跳ね返る問題があった。
【0008】
そこで、本発明では、前記問題を解決した玉型形状測定装置及び玉型形状測定方法を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明に係る玉型形状測定装置は、フィーラと、前記フィーラがレンズ枠の溝又は型板の周縁に向かって移動する際の、前記フィーラの単位時間当たりの移動量を検出する移動量検出手段と、前記移動量検出手段により検出された前記単位時間当たりの移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御する制御手段と、を有することを特徴とする。
【0010】
ここで、「移動速度が緩慢に」とは、フィーラがレンズ枠の溝又は型板の周縁に当接した際に、レンズ枠や型板が破損しない程度であって、移動の際の摩擦に打ち勝つ程度の範囲の速度であることを意味する。
【0011】
これにより、フィーラが停止してしまうのを防止しつつ、レンズ枠又は前記型板への衝撃を弱め、レンズ枠又は前記型板の破損を防止することができる。
【0012】
また、本発明に係る玉型形状測定装置において、前記制御手段は、前記移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする。
【0013】
これにより、フィーラの移動速度が速いことによるフィーラのレンズ枠又は型板からの跳ね返りを防止することができる。
【0014】
ここで、「第1所定値」とは、フィーラがレンズ枠の溝や型板の周縁に当接した際に、レンズ枠や型板が破損しない上限の速度である。
【0015】
さらに、本発明に係る玉型形状測定装置において、前記制御手段は、前記移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする。
【0016】
ここで、「第2所定値」とは、フィーラが移動するときに生じる移動摩擦に打ち勝つ最低限の速度を意味する。
【0017】
これにより、移動摩擦によりフィーラが途中で止まってしまうことを防止することができる。
【0018】
そして、本発明に係る玉型形状測定装置において、前記制御手段は、前記移動量検出手段が、前記移動速度を所定時間以上検出しない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする。
【0019】
これにより、フィーラがレンズ枠の溝又は型板の周縁に当接する前に止まってしまうことを防ぐことができる。
【0020】
また、本発明に係る玉型形状測定装置において、前記フィーラを移動させるDCモータを有し、前記制御手段は、前記DCモータへ供給する電流の制御することにより、前記フィーラの移動速度を制御することを特徴とする。
【0021】
これにより、複雑な構成を用いることなくフィーラの移動の制御を行うことができる。
【0022】
また、本発明に係る玉型形状測定方法は、レンズ枠の溝又は型板の周縁に向かって移動するフィーラの単位時間当たりの移動量を検出し、検出された前記移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御することを特徴とする。
【0023】
これにより、レンズ枠又は前記型板への衝撃を弱め、レンズ枠又は前記型板の破損を防止することができる。
【0024】
さらに、本発明に係る玉型形状測定方法において、検出された前記フィーラの移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする。
【0025】
これにより、フィーラの移動速度が速いことによるフィーラのレンズ枠又は型板からの跳ね返りを防止することができる。
【0026】
そして、本発明に係る玉型形状測定方法において、検出された前記フィーラの移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする。
【0027】
これにより、移動摩擦によりフィーラが途中で止まってしまうことを防止することができる。
【0028】
また、本発明に係る玉型形状測定方法において、前記フィーラの移動速度が所定時間以上検出されない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする。
【0029】
これにより、フィーラがレンズ枠の溝又は型板の周縁に当接する前に止まってしまうことを防ぐことができる。
【0030】
さらに、本発明に係る玉型形状測定方法において、前記フィーラを移動させるDCモータへ供給する電流の制御することにより、前記フィーラの移動を制御することを特徴とする。
【0031】
これにより、複雑な構成を用いることなくフィーラの移動の制御を行うことができる。
【0032】
また、本発明に係る玉型形状測定装置及び玉型形状測定方法は、レンズ枠の溝又は型板の周縁にセットする際のレンズ枠形状用又は型板測定用のフィーラの移動中の単位時間当たりの移動量(移動速度)をチェックし、フィーラの移動速度が速すぎる場合は、移動モータの電流を落として移動速度を遅くし、移動速度が遅くなったときは、摩擦により止まってしまう可能性があるため、移動モータの電流を上げて、摩擦により止まらないよう、フィーラの移動速度を速めるよう制御することができる装置・方法であり、眼鏡レンズ枠又は型板にフィーラを当接させる際に、前記フィーラの移動速度を緩慢にし、前記レンズ枠の溝又は前記型板の周縁にゆっくりと係合し、前記レンズ枠又は前記型板への衝撃を弱めるように作用することを特徴とする。
【0033】
これにより、レンズ枠又は前記型板への衝撃を弱め、レンズ枠又は前記型板の破損を防止することができる。
【0034】
また、本発明に係る玉型形状測定装置及び玉型形状測定方法は、フィーラが前後方向に移動する機構であって、その移動方法をモータ等を利用して移動させる際に、前記フィーラの移動速度が一定以上にならないように単位時間当たりの移動量を監視し、あらかじめ設定された速度に達したときは、前記モータの電流等を制御し、前記移動速度を一定になるように電流を制御する制御手段を有することを特徴とする。
【0035】
これにより、フィーラの前後方向の移動速度を一定にし、移動速度が速いことによるフィーラのレンズ枠又は型板からの跳ね返りを防止し、かつ、移動摩擦によりフィーラが途中で止まってしまうことを防止することができる。
【0036】
また、本発明に係る玉型形状測定装置及び玉型形状測定方法は、フィーラの移動速度を監視し、一定時間以上移動量が検出されなかった場合、前記フィーラがレンズ枠の溝に入ったかどうか又は型板の周縁に当接したのかどうかを確認し、次の測定動作に移行するかどうか判断する判断手段を有することを特徴とする。
【0037】
これにより、フィーラがレンズ枠の溝に入る前に次の測定動作に移行してしまうことを防止できる。
【発明の効果】
【0038】
本発明に係る玉型形状測定装置及び玉型形状測定方法によれば、フィーラの移動速度を緩慢にし、レンズ枠又は型板への衝撃を弱めるように作用させるために、レンズ枠の溝又は型板の周縁にゆっくりと係合させることができ、レンズ枠又は型板が破損してしまう可能性を軽減させることができる。
【0039】
また、レンズ枠測定用又は型板測定用のフィーラがレンズ枠の溝又は型板の周縁から跳ね返ってバウンドすることなく、かつ、フィーラの移動摩擦により止まることなく、フィーラの移動速度を制御することができる。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態である眼鏡枠測定装置の一部を示す部分概略斜視図である。
【図2】図1の眼鏡枠測定装置の測定機構の斜視図である。
【図3】図2の測定機構の正面図である。
【図4】図2の測定機構の背面図である。
【図5】図2の測定機構の右側面図である。
【図6】図2の測定機構の回転ベースの駆動手段を示す模式図である。
【図7】図2のスライダの駆動機構を説明するための模式図である。
【図8】図7の平面図である。
【図9】図2のスライダの原点位置を検出する手段を示す概略説明図である。
【図10】図2の接触子の昇降機構を示す斜視図である。
【図11】図10の昇降機構による眼鏡枠の測定のための説明図である。
【図12】図11の左側面図である。
【図13】図1に示した眼鏡枠測定装置の制御回路図である。
【図14】本発明の一実施形態である眼鏡枠測定装置の接触子の内部構成を示す部分拡大断面図である。
【図15】本発明の一実施形態である眼鏡枠測定装置の移動制御手段による制御機構回路図である。
【図16】(a)〜(c)は、その他の実施形態である眼鏡枠測定装置の接触子の内部構成を示す部分拡大断面図である。
【発明を実施するための形態】
【0041】
まず、本発明の玉型形状測定装置の前提となる形態について、図面を参照して説明する。
[玉型形状測定装置全体の構成]
図1は、本発明の一実施形態である眼鏡枠測定装置100(玉型形状測定装置)の一部を示す部分概略斜視図である。また、図2は、図1に示した眼鏡枠測定装置100の測定機構を示す斜視図である。
【0042】
図1において、眼鏡枠測定装置100は、測定装置本体1を有する。この測定装置本体1は、測定機構収納用のケース部1aと、眼鏡枠(レンズ枠)を保持する眼鏡枠保持機構1bとを備え、ケース部1a内の底部には、図2に示したベース2が設けられている。
【0043】
また、眼鏡枠保持機構1bは、ケース部1aに固定された一対の平行なガイドロッド1c,1cを有する。そして、このガイドロッド1c,1cにはスライド枠3,3が相対接近・離反可能に保持されている。このスライド枠3,3は、図示しないコイルスプリング等で互いに接近する方向にバネ付勢されている。
【0044】
また、スライド枠3,3は、眼鏡枠(図示せず)が当接させられる、互いに対向した縦壁3a,3aを有すると共に、この眼鏡枠を保持させる眼鏡枠保持手段3bを有する。
【0045】
この眼鏡枠保持手段3bは、縦壁3aから突出する下部側の保持棒3b1と、保持棒3b1に対して上側から開閉可能にスライド枠3に取り付けられた上側の保持棒3b2とを有する。この眼鏡枠保持手段3bは、図示しない眼鏡の左右の眼鏡枠に対応してそれぞれ設けられる。なお、このような眼鏡枠保持機構1bとしては、例えば、特開平10−328992号公報等に開示された構成、又はその他周知の技術を採用することができる。したがって、眼鏡枠保持機構1bの詳細な説明は省略する。
【0046】
また、ベース2上には、図2〜図5に示すように、測定機構1dが設けられている。この測定機構1dは、ベース2上に固定されたベース支持部材4を有する。このベース支持部材4には、大径の従動ギヤ5が、鉛直軸を中心とする水平回転自在に取り付けられている。また、ベース2には、図6に模式的に示した駆動モータ6(接触子制御手段)が取り付けられている。この駆動モータ6の出力軸6aには、ピニオン7が固定され、このピニオン7と従動ギヤ5とには、タイミングベルト8が掛け渡されている。
【0047】
そして、駆動モータ6を作動させると、駆動モータ6の出力軸6aの回転がピニオン7
及びタイミングベルト8を介して従動ギヤ5に伝達されて、従動ギヤ5が回転させられる
ようになっている。なお、駆動モータ6としては、例えば、2相ステッピングモータ等が用いられている。
【0048】
従動ギヤ5には、図2に示すように、その上部に回転ベース9が一体に固定されている。この回転ベース9には、回転の基準位置(原点、位置)を検出するフォトセンサ9aが取り付けられ、ベース2上には、回転の基準位置を支持する発光手段9bが配設され、この発光手段9bから線状又は点状の光束を原点マークとして上方に向けて照射し、この原点マークとしての光束をフォトセンサ9aが検出したときに、回転ベース9の水平回転の基準位置を検出することができる。なお、原点を検出する装置としては、透過型のフォトセンサや反射型のフォトセンサ或いは近接センサ等の周知の技術を採用することができる。
【0049】
さらに、回転ベース9の長手方向両端部には、図3に示すように、上下に延び、且つ互いに対向する平行なレール取付板10,11が一体に固定され、レール取付板10の一側部とレール取付板11の一側部には、側板12の長手方向端部がそれぞれ固定され、図4に示すように、レール取付板10の他側部とレール取付板11の他側部には、側板13の長手方向端部がそれぞれ固定されている。
【0050】
対向するレール取付板10,11の上部間には、図4に示すように、互いに平行で、且つ軸状の一対のガイドレール14,14が水平に配設されている。この各ガイドレール14,14の両端部は、レール取付板10,11に固定されていて、ガイドレール14,14には、スライダ15がこれらガイドレール14,14の長手方向に沿って進退移動可能に保持されている。
【0051】
さらに、側板12には、図2及び図3に示すように、レール取付板10に近接させて、かつ側板12の側方に向けて水平に突出するプーリ支持板部12aが、折曲げにより一体に形成されていると共に、レール取付板11に近接させて、かつ側板12の側方に向けて水平に突出するモータ取付用のブラケット16が固定されている。
【0052】
そして、プーリ支持板部12aには、図2に示すように、従動プーリ17が上下に延びる軸線を中心として水平回転自在に取り付けられ、ブラケット16には、スライダ移動用の駆動モータ18(接触子移動制御手段、押圧制御モータ)の上端部が固定されている。この駆動モータ18としては、例えば、DCモータ等が用いられている。また、この駆動モータ18は、出力軸18aの軸線が上下に延びていて、この出力軸18aには、図7及び図8に示すように、駆動プーリ19が取り付けられている。
【0053】
これら両プーリ17,19には、ワイヤ20が掛け渡され、このワイヤ20の一端部は、軸状のワイヤ保持部材21に保持されている。このワイヤ保持部材21は、ブラケット22,22′を介してスライダ15に固定されている。また、ワイヤ20の両端部は、コイルスプリング23を介して連結され、全体として環状とされている。これにより、駆動モータ18を正転または逆転させると、出力軸18a及び駆動プーリ19が正転または逆転させられて、これら出力軸18aおよびプーリ19に架け渡されたワイヤ20が変位することにより、スライダ15が図3中左又は右に移動させられるようになっている。
【0054】
ブラケット22′と側板12との間には、図9に示すように、スライダ15の移動位置(移動量)の基準位置(原点)を検出するための原点センサ20aが設けられている。この原点センサ20aとしては、例えば、反射型のフォトセンサ等を用いている。この原点センサ20aは、上下に延びたスリット状の反射面(図示せず)が設けられた反射板20bを有すると共に、発光素子と受光素子を備えた反射型のフォトセンサ20cを有する。
【0055】
そして、反射板20bはブラケット22′に設けられ、フォトセンサ20cは側板12に設けられている。なお、原点センサ20aとしては、透過型のフォトセンサや近接センサ等の周知の技術を採用することもできる。
【0056】
側板13の長手方向中央部には、図4に示すように、側方に向けて水平に突出する支持板部13aが一体に折曲げにより形成されている。この側板13とスライダ15との間には、ガイドレール14の延びる方向(水平方向)へのスライダ15の移動位置を検出するリニアスケール24(位置検出手段)が動径検出センサとして設けられている。
【0057】
このリニアスケール24は、ガイドレール14と平行にスライダ15に保持され、ガイドレール14に沿った方向への位置情報が表された軸状のメインスケール25と、支持板部13aに固定されて、メインスケール25に表されている位置情報を読み取る検出ヘッド26とを備えている。
【0058】
この検出ヘッド26は、メインスケール25の位置情報を読み取ることで、スライダ15の水平方向への移動位置(制御位置情報)を検出するようになっている。リニアスケール24としては、例えば、周知の磁気式のものや光学式のものを用いることができる。例えば、磁気式の場合、メインスケール25の長手方向に沿って、磁極S,Nの磁気パターンを位置情報として交互に微小間隔で設け、この磁気パターンを検出ヘッド26で検出することにより、スライダ15の移動量(移動位置)を検出することができる。
【0059】
また、光学式の場合、メインスケール25を板状に形成し、且つこのメインスケール25の長手方向に沿って、微小間隔のスリットを設け、メインスケール25を挟むように発光素子と受光素子とを配設すると共に、発光素子からの光をメインスケール25のスリットを介して受光素子により検出して、通過したスリットの数を求めることにより、スライダ15の移動量(移動位置)を検出することができる。
【0060】
スライダ15の略中央部には、図2に示すように、貫通孔15aが形成され、この貫通孔15aには、上下に延びるガイド筒27が挿通されている。このスライダ15の下方には、図4に示すように、支持枠28が配設されている。この支持枠28は、上端部がスライダ15に保持された縦フレーム29,30と、縦フレーム29,30の下端部に固定された横板31とを備えている。
【0061】
横板31には、図12に示すように、上下に延び且つ互いに平行に設けられた軸状の一対の支持部材32,32の下端部が固定されている。この支持部材32,32の上端部には、保持部材33が固定され、この保持部材33には、側面形状がL字状に形成されたガイド支持部材34の縦壁34aが固定されている。このガイド支持部材34の横壁34b上にはガイド筒27の下端部が固定されている。
【0062】
そして、ガイド筒27には、上下に延びる接触子軸35が上下動自在に嵌合保持され、
接触子軸35の上端部には、接触子取付部材36が一体に設けられている。この接触子取
付部材36は、接触子軸35の上端部に垂直に取り付けられた取付部36aと、取付部3
6aから上方に延びる垂直部36bとから形成され、これらはL字状に形成されている。この垂直部36bの上端部には、取付部36aと平行に延びた接触子(フィーラ)37が一体に設けられている。
【0063】
接触子軸35の下端部には、図10〜図12に示すように、ブラケット39が固定されている。そして、ブラケット39とガイド支持部材34との間には、図11に示すように、
上下方向の移動位置(=Z軸値)を検出するリニアスケール40が、高さ検出センサとして設けられている。
【0064】
このリニアスケール40は、接触子軸35と平行に配設された、上下方向の移動位置が表された軸状のメインスケール41と、メインスケール41の上下方向への移動量(移動位置)を検出し、この検出結果に基づいて接触子37の上下方向への移動位置を検出する検出ヘッド42を備えている。メインスケール41は、上端部が保持部材33に固定され、且つ下端部がブラケット39に固定(又は保持)されている。また、検出ヘッド42は、保持部材33に保持されている。このリニアスケール40も、上述したリニアスケール24と同様に、磁気式又は光学式のものを採用することができる。
【0065】
ブラケット39と横板31との間には、図10〜図12に示すように、接触子軸35を上方に向けてバネ付勢するコイルスプリング43が設けられている。さらに、接触子軸3
5の下端部近傍には、ブラケット39の上方に位置し、且つ接触子軸35と直交する係合
軸44が取り付けられている。
【0066】
また、横板31上には、図10に示すように、U字状に形成したブラケット45が固定され、このブラケット45の対向壁45a,45aには、支持軸46の両端部が軸線回りに回動可能に保持され、この支持軸46に押さえレバー47が固定されている。
【0067】
この押さえレバー47は、係合軸44の上部に当接させられている。そして、この押さえレバー47と横板31との間には、レバー引き下げ用の引張りコイルスプリング48が設けられている。この引張りコイルスプリング48の引張りバネ力(弾性係数)は、コイルスプリング43のバネ力(弾性係数)よりも大きく設定されている。
【0068】
また、支持軸46には、上昇位置規制レバー49が固定されている。この上昇位置規制
レバー49は、押さえレバー47による係合軸44の上昇限度を規制して、接触子軸35
及び接触子37の上昇位置を規定するのに用いられる。この上昇位置規制レバー49は、押さえレバー47と同方向に延びている。
【0069】
そして、この上昇位置規制レバー49の下方には、アクチュエータモータ50が配設さ
れている。このアクチュエータモータ50は、横板31上に固定されたモータ本体50a
と、このモータ本体50aから上方に向けて突出し、且つ軸線が接触子軸35と平行に設
けられたシャフト51とを有する。そして、このシャフト51の上端には、上昇位置規制レバー49が引張りコイルスプリング48の引張りバネ力により当接させられている。
【0070】
アクチュエータモータ50としては、DCモータ等が用いられる。この、アクチュエータモータ50は、正転させることによりシャフト51が上方に移動し、逆転させることによりシャフト51が下方に移動するようになっている。
【0071】
なお、コイルスプリング43,支持軸46,押さえレバー47,引張りコイルスプリング48,上昇位置規制レバー49およびアクチュエータモータ50等は、接触子37を昇降させる昇降機構を構成している。
<制御回路>
図13に示すように、フォトセンサ9aからの回転ベース9の回転方向原点位置検出信号と、フォトセンサ20cからのスライダ15の動径方向原点位置検出信号と、リニアスケール24の検出ヘッド26からの上下方向移動量検出信号と、リニアスケール40の検出ヘッド42からのZ軸移動量検出信号が、それぞれ演算制御回路52に入力されるようになっている。また、この演算制御回路52は、駆動モータ6,18およびアクチュエータモータ50を作動制御するようになっている。
【0072】
スライド枠3,3の一方の側壁には、図1に示したように、眼鏡枠の保持を検出するホルダー検出手段53が設けられている。このホルダー検出手段53には、マクロスイッチ等が用いられていて、このホルダー検出手段53のマクロスイッチからの検出信号は、図13に示したように演算制御回路52(移動制御手段64、演算手段)に入力されるようになっている。図中の符号54は測定開始用のスタートスイッチである。
[玉型形状測定装置全体の作用]
この眼鏡枠測定装置100で眼鏡枠の形状測定を行う前は、アクチュエータモータ50のシャフト51の上端が図10〜図12に示したように最下端に位置している。この位置では押さえレバー47が、コイルスプリング43よりもバネ力の強い引張りコイルスプリング48によって、係合軸44を介して接触子軸35を下方に押し下げている。これにより、接触子37は最下端に位置させられている。
【0073】
この状態の眼鏡枠測定装置100で眼鏡枠の形状測定を行う場合には、例えば特開平10−328992号公報におけるように、図11に示した眼鏡枠の左(右)の眼鏡枠LF(RF)を図11の如く保持棒3b1,3b2間で挟持させる。この保持の仕方は特開平10−328992号公報と同様である。
【0074】
また、この保持棒3b1,3b2間に保持された眼鏡枠LF(RF)は、図11に示したように測定開始前の状態では接触子37よりも上方に位置するように設定されている。即ち、接触子37は、眼鏡枠LF(RF)よりも下方の初期位置(イ)に位置させられている。しかも、図11に示したように、接触子37は、保持棒3b1,3b2間に保持された眼鏡枠LF(RF)の略中央の初期位置(i)に位置されている。
【0075】
この位置では、フォトセンサ9aが発光手段9bからの光束から回転ベース9の回転方向の原点を検出し、原点センサ20aがスライダ15の動径方向の原点を検出している状態となっている。
【0076】
なお、眼鏡枠が三次元に湾曲していても、眼鏡枠の保持棒3b1,3b2による眼鏡枠の保持された部分は他の部分よりも最も低く設定した高さとなる。この保持された部分では、眼鏡枠LF(RF)のヤゲン溝Ymの高さも設定した高さとなり、眼鏡枠の形状測定開始位置Bとなる。
【0077】
この状態から図13のスタートスイッチ54をオンに切り替えられると、演算制御回路52はアクチュエータモータ50を正転させて、図11の位置からシャフト51を所定量だけ上昇させる。この際、シャフト51は、上昇位置規制レバー49の自由端部を引張りコイルスプリング48のバネ力に抗して上方に所定量持ち上げて、上昇位置規制レバー49を支持軸46と一体に回動させる。
【0078】
これに伴い、押さえレバー47は、支持軸46と一体に回動して、自由端部が上方に所定量上昇させられる。そして、この押さえレバー47の自由端部の上昇により、係合軸44がコイルスプリング43のバネ力により押さえレバー47の自由端部に追従して上昇させられ、接触子軸35が所定量上昇させられる。
【0079】
この接触子軸35の上昇量、即ちアクチュエータモータ50によるシャフト51の上方への上昇量は、接触子37の先端が図11の初期位置(イ)から上述した形状測定開始位置Bのヤゲン溝Ymに臨む高さ(ロ)まで上昇する量Lとなる。
【0080】
そして、演算制御回路52は、駆動モータ18を駆動制御して駆動プーリ19を回転させ、図2、図7のワイヤー20によりスライダ15をガイドレール14に沿って移動させる。この際、スライダ15は図11の矢印A1方向に移動させられる。この移動は、接触子37の先端が形状測定開始位置Bでヤゲン溝Ymに当接させられるまで行われる。しかも、接触子37の先端がヤゲン溝Ymに当接した状態では、接触子37はヤゲン溝Ymにコイルスプリング23のバネ力で弾接させられる。この状態で、駆動モータ18が停止される。
【0081】
なお、接触子37の先端がヤゲン溝Ymに当接したときには、駆動モータ18にかかる負荷が増大するので、この電流変化を検出することで、接触子37の先端がヤゲン溝Ymに当接したのを検出して、駆動モータ18を停止させることもできるが、本実施形態の眼鏡枠測定装置100では、後述する構成によって駆動モータ18を制御している。
【0082】
この後、演算制御回路52は、さらにアクチュエータモータ50を正転させて、所定量だけ上昇させる。この際、シャフト51は、上昇位置規制レバー49の自由端部を引張りコイルスプリング48のバネ力に抗して上方に所定量持ち上げて、上昇位置規制レバー49を支持軸46と一体に回動させる。
【0083】
これに伴い、押さえレバー47は、支持軸46と一体に回動して、自由端部が上方に所定量上昇させられ、押さえレバー47の自由端部が係合軸44から所定量離反させられ、接触子軸35が上方に変移可能となる。
【0084】
次に、演算制御回路52は、駆動モータ6を駆動制御して、駆動モータ6を正転させる。この駆動モータ6の回転は、ピニオン7,タイミングベルト8を介して従動ギヤ5に伝達され、従動ギヤ5が回転ベース9と一体に水平回転させられる(図6参照)。
【0085】
この回転ベース9の回転に伴い、スライダ15及びこのスライダ15に設けられた多数の部品が回転ベース9と一体に水平回転し、接触子37の先端がヤゲン溝Ymに沿って摺動移動する。
【0086】
この際、スライダ15が接触子37と一体にガイドレール14に沿って移動するので、スライダ15の原点位置からスライダ15が移動したときの移動量は、接触子37の先端の移動量と同じになる。この移動量は、リニアスケール24の検出ヘッド26の検出信号に基づいて演算制御回路52により求められる。
【0087】
しかも、接触子軸35の中心から接触子37の先端までの寸法(長さ)は既知であるので、スライダ15が原点にあるときの回転ベース9の回転中心から接触子37の先端までの距離を予め設定しておくことで、スライダ15がガイドレール14に沿って移動したときにおいて、回転ベース9の回転中心から接触子37の先端までの距離が変化しても、この距離の変化を動径値ρiとすることができる。
【0088】
したがって、駆動モータ6の回転による回転ベース9の回転角度位値θiを、回転方向の位置検出手段としての演算制御回路52が、駆動モータ6の駆動パルス数から求め、この回転角度位値θiにそれぞれ対応する動径値ρiを求めることで、演算手段としての演算制御回路52が、眼鏡枠LF(RF)のヤゲン溝Ymの周方向に沿った輪郭形状(眼鏡枠形状)を、極座標形式の眼鏡枠形状情報(θi,ρi)として求めることができる。
【0089】
また、接触子37の先端がヤゲン溝Ymに沿って摺接移動する際、眼鏡枠LF(RF)に上下方向の湾曲がある場合、この上下方向への湾曲状態は、リニアスケール40の検出ヘッド42の検出信号から演算制御回路52により上下方向の変位量として求められる。この上下方向への変位量は、Z軸値Ziとなる。
【0090】
従って、眼鏡枠LF(RF)の眼鏡枠形状は、演算制御回路52により三次元の眼鏡枠形状情報(θi,ρi,Zi)として求められる。
[接触子内部の構成]
ここで、上述した一実施形態の眼鏡枠測定装置100における接触子37の詳細な構成を図14に基づき説明する。
【0091】
図14に示すように、接触子37は、先端に球状部材60を回転自在に抱持しており、接触子37の内部には、球状部材60と接するように設けられた、球状部材60に作用する圧力を検出する圧力検出手段61が組み込まれている。この圧力検出手段61は、ダイアフラム61aと、ダイアフラム61aの動きを圧力として検出する圧力検出部61bとを有する。
【0092】
また、接触子37は、圧力検出手段61により検出された接触子37の先端(球状部材60)にかかる圧力を押圧力情報として送信する送信手段62を内部に備えている。さらに、演算制御回路52は、送信手段62により送信された押圧力情報を受信する受信手段63を有すると共に、受信手段63によって受信された押圧力情報が表す圧力が一定の圧力となるように、駆動モータ18による接触子37の動径方向への移動を制御する移動制御手段64の機能を有している。
【0093】
なお、圧力検出手段61と移動制御手段64(演算制御回路52)との間の押圧力情報の送受信は、送信手段62と受信手段63とによる無線によるものに限定されるものではなく、通常の電線を用いた有線での送受信であってもよい。この場合、送信手段62と受信手段63とを省略した構成とすることができる。
[接触子の作用]
次に、本実施形態に係る眼鏡枠測定装置100の作用について説明する。
【0094】
眼鏡枠LF(RF)の輪郭形状を測定する際、駆動モータ6による回転ベース9の回転に伴い、スライダ15及びこのスライダ15に設けられた多数の部品が回転ベース9と一体に水平面内回転し、一方、駆動モータ18の回転によるスライダ15の動径方向への移動により、接触子37の先端がヤゲン溝Ymに沿って摺接移動する。このとき、接触子37の先端は、ヤゲン溝Ymとの摺動によって、回転ベース9の回転方向と反対の向きに回転モーメントを受ける。
【0095】
しかし、本実施形態の眼鏡枠測定装置100は、接触子37の先端に回転自在に設けられた球状部材60が回転することにより、摺動抵抗を低減するため、この回転モーメントを小さくすることができる。
【0096】
また、眼鏡枠LF(RF)の輪郭形状を測定する際、球状部材60は眼鏡枠LF(RF)のヤゲン溝Ymと接する反力として眼鏡枠LF(RF)から押圧力を受ける。この球状部材60にかかる押圧力は、図15に示すように、圧力検出手段61によりが検出される。この検出された押圧力は圧力検出手段61によって電気信号等の押圧力情報に変換され、送信手段62が、電線などの有線接続または電波などの無線接続(赤外線送信、無線LAN等)により、移動制御手段64に備えられた受信手段63に送信する。
【0097】
移動制御手段64(演算制御回路52)は、受信手段63によって受信された押圧力情報が、球状部材60とヤゲン溝Ymとが適切な一定の圧力で当接するように設定された規定値Rより小さい場合には、接触子37が眼鏡枠LF(RF)に近づく方向に移動するように駆動モータ18を正転させて、押圧力情報が規定値Rを維持するように駆動モータ18を制御する。反対に受信された圧力情報が規定値Rより大きい場合には、接触子37が眼鏡枠LF(RF)から離れる方向に移動するように駆動モータ18を逆転させて、押圧力情報が規定値Rを維持するように駆動モータ18を制御する。
【0098】
このように移動制御手段64は、接触子37の眼鏡枠方向に対する動き(動径方向に沿った移動)を制御することで、球状部材60が眼鏡枠LF(RF)から受ける押圧力を一定とするように調整する。
【0099】
以上のように本実施形態に係る眼鏡枠測定装置100によれば、眼鏡枠LF(RF)の輪郭形状の測定時に、接触子37の先端に回転自在に設けられた球状部材60が、回転方向とは反対の向きに回転することで、接触子37と眼鏡枠LF(RF)との間に生じる摺動抵抗を低減するため、接触子37及び眼鏡枠LF(RF)が受ける回転モーメントを軽減させることができる。
【0100】
つまり、球状部材60の回転により接触子37の動きを滑らかにすることができ、この結果、眼鏡枠LF(RF)と接触子37との間に生じる摺動抵抗を少なくし、接触子37の軸が撓んだり、折れたり、眼鏡枠LF(RF)の輪郭形状が歪んだりすることを防ぐことができる。
【0101】
また、球状部材60が眼鏡枠LF(RF)から受ける押圧力が一定となるように動径方向の移動量が調整されるため、眼鏡枠LF(RF)の輪郭形状測定時に眼鏡枠LF(RF)に対する押圧力が不足して、接触子37が、当接されている眼鏡枠LF(RF)のヤゲン溝Ymから外れてしまうことを防ぐことができる。
【0102】
さらに、接触子37の眼鏡枠LF(RF)に対する押圧力が過剰となり、接触子37や眼鏡枠LF(RF)の輪郭形状を変形させてしまうことを防ぐこともできる。
【0103】
なお、本実施形態に係る眼鏡枠測定装置100は、圧力検出手段61が接触子37の内部において球状部材60と接するように設けられているが、本発明に係る眼鏡枠測定装置はこの形態に限定されるものではなく、例えば、圧力検出手段61が球状部材60の内部に設けられた構成を採用することもできる。
【0104】
このように、圧力検出手段61を球状部材60の内部に設けた構成の眼鏡枠形状測定装置によっても、上述した実施形態の眼鏡枠形状測定装置100と同様の作用、効果を発揮することができる。
【0105】
また、図14は、圧力検出手段61が球状部材60に対して受け皿のように覆う構成であるが、この圧力検出手段61は、球状部材60が動径方向に押圧される力を検出できる形状であれば、図16(a)に示すように、2点(ア),(イ)のみで接していたり、図16(b),(c)に示すように、1点(ウ)または(エ)のみで接する形状であっても良い。
【0106】
なお、圧力検出手段61は、ダイアフラムのみならず、タッチセンサ、圧電素子、またはMEMS(マイクロ電気機械システム)を用いても良い。
【0107】
または、ダイアフラムを用いるものでは、ダイアフラムにひずみゲージを設置した圧力センサを適用することもできる。
【0108】
なお、本実施形態は、図11に示したように、引張りコイルスプリング48によって上昇位置規制レバー49を下方に付勢し、この付勢によって上昇位置規制レバー49と一体的に下方に付勢された押さえレバー47が係合軸44を下方に付勢することで、接触子37が設けられた接触子軸35の上昇を規制し、一方、アクチュエータモータ50を駆動させてシャフト51を上昇させることで、アクチュエータモータ50のシャフト51が引張りコイルスプリング48の付勢力に抗して上昇位置規制レバー49を上昇させると、上昇位置規制レバー49と一体的に押さえレバー47も上昇し、これにより、押さえレバー47による係合軸44の下方への拘束が解除されて、接触子37の上下方向への変位を自在とする構成であるが、接触子37の上下方向への変位の規制および解除を行う構成は、このような態様に限定されるものではない。
【0109】
すなわち、例えば、特開2002−122829号公報の図4〜図6に示されているような、パルスモータと、パルスモータの軸に設けられたピニオンギアと、ピニオンギアに噛合するラックとによって、接触子37の上下方向への変位の規制および解除を行う構成を採用することもできる。
【0110】
また、図7に示したようなモータ18およびワイヤー20による、接触子37を動径方向に駆動する構成に代えて、モータと上記ラックおよびピニオンギアの組み合わせとを用いた構成を適用することもできる。
【0111】
次に、本発明の玉型形状測定装置の中心となる形態について説明する。
【0112】
まず構成について説明する。
【0113】
本発明に係る眼鏡枠測定装置(玉型形状測定装置)100は、上記の前提となる構成に加えて、接触子(フィーラ)37の単位時間当たりの移動量を検出する移動量検出手段と、接触子37の移動を制御する制御手段と、を有している。
【0114】
制御手段は、移動量検出手段により検出された、眼鏡枠(レンズ枠)LF(RF)の溝に向かって移動する際の接触子37の移動量に応じた移動速度が緩慢になるように、接触子37の移動を制御する。
【0115】
また、制御手段は、接触子37の移動速度が、第1所定値以上である場合には移動速度を下げるように接触子37の移動を制御し、一方、第1所定値よりも低い値である第2所定値未満である場合には移動速度を上げるように接触子37の移動を制御する。
【0116】
なお、「第1所定値」とは、接触子37が眼鏡枠LF(RF)の溝に当接した際に眼鏡枠LF(RF)が破損しない上限の速度である。また、「第2所定値」とは、接触子37が移動するときに生じる移動摩擦に打ち勝つ最低限の速度である。
【0117】
さらに、制御手段は、移動量検出手段が、接触子37の移動量を所定時間以上検出しない場合には、接触子37が眼鏡枠LF(RF)の溝に当接したと判断し、接触子37の移動を終了させるように制御する。
【0118】
そして、これらの制御は、制御手段が駆動モータ(DCモータ)18へ供給する電流の制御することにより行う。
【0119】
次に作用について説明する。
【0120】
測定を開始する際には、あらかじめ設定されている電流値(第1所定値および第2所定値に対応する電流量)を駆動モータ18に設定する。
【0121】
また、移動量検出手段は、単位時間(例えば1mSec)ごとに接触子37に付随しているリニアスケール24を利用し、単位時間ごとの移動量を検出する。
【0122】
検出された移動量に応じた移動速度が、設定された第1所定値に対応する移動速度よりも速い場合は、接触子37の移動速度が速すぎると判断し、一定量電流値を落とし、移動速度を下げる。このとき、駆動モータ18へ供給する電流を停止させ、接触子37が惰性で移動するようにして、移動速度を下げるようすることも可能である。
【0123】
一方、検出された移動量が、設定された第2所定値に対応する移動速度よりも遅い場合は、移動の際の摩擦により接触子37の移動が止まる可能性があるため、一定量電流値を上げ、移動速度を上げていく。
【0124】
この場合、第1所定値は、例えば1秒当たり80〜100mmの移動量に対応する移動速度であり、第2所定値は、例えば1秒当たり10mm以下の移動量に対応する移動速度である。
【0125】
また、接触子37の移動速度は、例えば1秒当たり30mm〜50mm程度の移動量に対応する移動速度であるように制御されることが好ましい。
【0126】
このように、制御手段は、眼鏡枠LF(RF)に接触子37を当接する際に、接触子37の移動速度を緩慢にし、眼鏡枠LF(RF)の周縁にゆっくりと係合し、眼鏡枠LF(RF)への衝撃を弱めるように接触子37の制御を行う。
【0127】
そして、接触子37が眼鏡枠LF(RF)の周縁に当接した際には、移動量検出手段による移動量の検出が行われず、この移動量の検出が行われない時間が所定時間以上である場合には、制御手段は接触子37の移動を終了させる。
【0128】
以上のように、本発明に係る玉型形状測定装置100によれば、接触子37の移動速度が緩慢に、すなわち、接触子37が眼鏡枠LF(RF)の溝に当接した際に、眼鏡枠LF(RF)が破損しない程度であって、移動の際の摩擦に打ち勝つ程度の範囲の速度になるように制御されることにより、接触子37が停止しまうのを防止しつつ、当接する際の衝撃を弱めることができ、眼鏡枠LF(RF)の破損の防止を可能にすることができる。
【0129】
また、接触子37の移動速度が第1所定値以上である場合には移動速度を下げるように制御されることにより、接触子37が眼鏡枠LF(RF)に突き当たったとき、接触子37が眼鏡枠LF(RF)の周縁に当たって跳ね返ること防止することができる。
【0130】
さらに、接触子37の移動速度が第1所定値よりも低い値である第2所定値未満である場合には移動速度を上げるように制御されることにより、移動の際の摩擦などにより接触子37が途中で止まってしまうことを防止することができる。
【0131】
そして、移動量検出手段が、接触子37の移動量を所定時間以上検出しない場合には、接触子37が眼鏡枠LF(RF)の溝に当接したと判断し、接触子37の移動を終了させることにより、接触子37が眼鏡枠LF(RF)の溝に当接する前に止まってしまうことを防ぐことができる。
【0132】
また、駆動モータ(DCモータ)18へ供給する電流の制御することにより、接触子37の移動を制御することにより、複雑な構成を用いることなく接触子37の移動の制御を行うことができる。
【0133】
なお、本実施形態では眼鏡枠(レンズ枠)LF(RF)の形状を測定する場合について説明したが、本発明に係る玉型形状測定装置及び玉型形状測定方法は、この態様に限定されるものではなく、例えば、レンズ枠に限らず、型板、パターン又はデモレンズ等の玉型の形状測定において採用することもできる。
【符号の説明】
【0134】
15 スライダ
17 従動プーリ
18 駆動モータ
18a 出力軸
19 従動プーリ
20 ワイヤ
21 ワイヤ保持部材
22,22’ ブラケット
23 コイルスプリング
【特許請求の範囲】
【請求項1】
フィーラと、
前記フィーラがレンズ枠の溝又は型板の周縁に向かって移動する際の、前記フィーラの単位時間当たりの移動量を検出する移動量検出手段と、
前記移動量検出手段により検出された前記単位時間当たりの移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御する制御手段と、
を有することを特徴とする玉型形状測定装置。
【請求項2】
前記制御手段は、前記移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする請求項1に記載の玉型形状測定装置。
【請求項3】
前記制御手段は、前記移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする請求項2に記載の玉型形状測定装置。
【請求項4】
前記制御手段は、前記移動量検出手段が、前記移動量を所定時間以上検出しない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする請求項1から3のいずれか1項に記載の玉型形状測定装置。
【請求項5】
前記フィーラを移動させるDCモータを有し、
前記制御手段は、前記DCモータへ供給する電流の制御することにより、前記フィーラの移動速度を制御することを特徴とする請求項1から4のいずれか1項に記載の玉型形状測定装置。
【請求項6】
レンズ枠の溝又は型板の周縁に向かって移動するフィーラの単位時間当たりの移動量を検出し、
検出された前記移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御することを特徴とする玉型形状測定方法。
【請求項7】
検出された前記フィーラの移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする請求項6に記載の玉型形状測定方法。
【請求項8】
検出された前記フィーラの移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする請求項7に記載の玉型形状測定方法。
【請求項9】
前記フィーラの移動速度が所定時間以上検出されない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする請求項6から8のいずれか1項に記載の玉型形状測定方法。
【請求項10】
前記フィーラを移動させるDCモータへ供給する電流の制御することにより、前記フィーラの移動を制御することを特徴とする請求項6から9のいずれか1項に記載の玉型形状測定方法。
【請求項1】
フィーラと、
前記フィーラがレンズ枠の溝又は型板の周縁に向かって移動する際の、前記フィーラの単位時間当たりの移動量を検出する移動量検出手段と、
前記移動量検出手段により検出された前記単位時間当たりの移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御する制御手段と、
を有することを特徴とする玉型形状測定装置。
【請求項2】
前記制御手段は、前記移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする請求項1に記載の玉型形状測定装置。
【請求項3】
前記制御手段は、前記移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする請求項2に記載の玉型形状測定装置。
【請求項4】
前記制御手段は、前記移動量検出手段が、前記移動量を所定時間以上検出しない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする請求項1から3のいずれか1項に記載の玉型形状測定装置。
【請求項5】
前記フィーラを移動させるDCモータを有し、
前記制御手段は、前記DCモータへ供給する電流の制御することにより、前記フィーラの移動速度を制御することを特徴とする請求項1から4のいずれか1項に記載の玉型形状測定装置。
【請求項6】
レンズ枠の溝又は型板の周縁に向かって移動するフィーラの単位時間当たりの移動量を検出し、
検出された前記移動量に応じた移動速度が緩慢になるように、前記フィーラの移動を制御することを特徴とする玉型形状測定方法。
【請求項7】
検出された前記フィーラの移動速度が第1所定値以上である場合には、前記移動速度を下げるように前記フィーラの移動を制御することを特徴とする請求項6に記載の玉型形状測定方法。
【請求項8】
検出された前記フィーラの移動速度が、前記第1所定値よりも低い値である第2所定値未満である場合には、前記移動速度を上げるように前記フィーラの移動を制御することを特徴とする請求項7に記載の玉型形状測定方法。
【請求項9】
前記フィーラの移動速度が所定時間以上検出されない場合には、前記フィーラが前記レンズ枠の溝又は前記型板の周縁に当接したと判断し、前記フィーラの移動を終了させるように制御することを特徴とする請求項6から8のいずれか1項に記載の玉型形状測定方法。
【請求項10】
前記フィーラを移動させるDCモータへ供給する電流の制御することにより、前記フィーラの移動を制御することを特徴とする請求項6から9のいずれか1項に記載の玉型形状測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2009−300427(P2009−300427A)
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願番号】特願2009−71194(P2009−71194)
【出願日】平成21年3月24日(2009.3.24)
【出願人】(000220343)株式会社トプコン (904)
【Fターム(参考)】
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願日】平成21年3月24日(2009.3.24)
【出願人】(000220343)株式会社トプコン (904)
【Fターム(参考)】
[ Back to top ]