
玉揚げ装置およびそれを備えた自動ワインダー
【課題】玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態を容易に把握することができる玉揚げ装置およびそれを備えた自動ワインダーを提供する。
【解決手段】複数並設された巻取ユニット10間を並設方向に走行し、巻取ユニット10に対して玉揚げ作業を行う玉揚げ装置20は、正面を覆う正面カバー21a、および両側面を覆う一対の側面カバー21b、21b’を備えた走行体フレーム21と、走行体フレーム21の正面カバー21aの両側にそれぞれ設けられた発光部L1、L2と、各発光部L1、L2の発光状態を制御する玉揚げ制御部25とを備える。玉揚げ制御部25は、当該玉揚げ装置20の走行時に、その走行方向の発光部L1またはL2を点滅させる。
【解決手段】複数並設された巻取ユニット10間を並設方向に走行し、巻取ユニット10に対して玉揚げ作業を行う玉揚げ装置20は、正面を覆う正面カバー21a、および両側面を覆う一対の側面カバー21b、21b’を備えた走行体フレーム21と、走行体フレーム21の正面カバー21aの両側にそれぞれ設けられた発光部L1、L2と、各発光部L1、L2の発光状態を制御する玉揚げ制御部25とを備える。玉揚げ制御部25は、当該玉揚げ装置20の走行時に、その走行方向の発光部L1またはL2を点滅させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、玉揚げ装置およびそれを備えた自動ワインダーに関するものである。
【背景技術】
【0002】
従来、複数並設された巻取ユニット間を走行して、巻取ユニットに対して玉揚げ作業を行う玉揚げ装置(作業台車)およびそれを備えた自動ワインダーが知られている(例えば特許文献1参照)。
図6に示すように、この自動ワインダー100の玉揚げ装置200は、所定の待機位置から、各巻取ユニット10を横切るレール2に沿って、満巻パッケージPを生成した巻取ユニット10へと走行し、満巻パッケージPを所定の場所へ移動させるとともに、新たなパッケージPを形成するための巻取管を当該巻取ユニット10に装着する、所謂玉揚げ作業を行うものである。
【0003】
ところで、この玉揚げ装置は、走行状態(玉揚げ装置が巻取ユニット間を走行している状態)、待機状態(玉揚げ装置が起動後に待機位置にいる起動待機状態、および玉揚げ装置が当該玉揚げ装置以外の装置の動作完了を待っているインターロック状態)、異常状態(装置に異常(機構異常や通信異常等)が生じている状態)等といった様々な動作状態をとりうるものであるが、これらの各種動作状態を容易に把握することのできる玉揚げ装置およびそれを備えた自動ワインダーは、これまで存在しなかった。
【0004】
なお、この玉揚げ装置200の中には、図6に示すような発光式の起動スイッチSWを備えたものがある。しかしながら、この玉揚げ装置200では、この起動スイッチSWの発光によって、玉揚げ装置200が起動状態(電源投入状態)にあるか否か、あるいは、玉揚げ装置200が異常状態にあるか否かを把握できる程度であって、玉揚げ装置特有の上記の走行状態や待機状態といった動作状態を判別することはできなかった。また、この玉揚げ装置200では、発光式の起動スイッチSWはそのサイズや光量が極めて小さいものであり、玉揚げ装置200から遠く離れた作業者は、その発光状態を認識することができなかった。さらに、玉揚げ装置200を監視する作業者は玉揚げ装置200の近傍にいることが多く、玉揚げ装置200が往復走行している状態では、予期せぬ接触により玉揚げ作業を中断させてしまうことがあった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−137539号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態を容易に把握することができる玉揚げ装置およびそれを備えた自動ワインダーを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明は、(1)複数並設された巻取ユニット間を並設方向に走行し、巻取ユニットに対して玉揚げ作業を行う玉揚げ装置において、
正面を覆う正面カバー、および両側面を覆う一対の側面カバーを備えた走行体フレームと、
走行体フレームの正面カバーの両側にそれぞれ設けられた発光部と、
各発光部の発光状態を制御する玉揚げ制御部とを備え、
玉揚げ制御部は、当該玉揚げ装置の走行時に、その走行方向の発光部を点滅させることとしたものである。
この構成によれば、走行体フレームの正面カバーの両側に発光部を設けて、玉揚げ制御部によって、玉揚げ装置の走行時に、その走行方向の発光部を点滅させるようになっているので、玉揚げ装置から遠く離れた作業者でも、玉揚げ装置の走行状態における走行方向を容易に把握することができる。ここで、正面とは、作業者に向く方向に形成された面(巻取ユニットの並設方向に沿って形成された面)を意味する。また、側面とは、巻取ユニットの並設方向に直交する方向に形成された面を意味する。
【0008】
また、上記構成(1)において、(2)発光部は、第1の発光色と第2の発光色とを切り替え可能であって、
玉揚げ制御部は、当該玉揚げ装置の待機状態において、各発光部を第1の発光色で発光させ、当該玉揚げ装置の異常状態において、各発光部を第2の発光色で発光させることが好ましい。
この構成によれば、各発光部の発光色の違いによって、玉揚げ装置の待機状態と異常状態を判別することができる。
【0009】
また、上記構成(2)において、(3)待機状態は、起動待機状態およびインターロック状態からなり、
玉揚げ制御部は、当該玉揚げ装置の起動待機状態において、各発光部を第1の発光色で点灯させ、当該玉揚げ装置のインターロック状態において、各発光部を第1の発光色で点滅させることが好ましい。
この構成によれば、各発光部の点灯点滅状態の違いによって、玉揚げ装置の起動待機状態とインターロック状態を判別することができる。各発光部の点灯点滅状態または発光色の違いによって、玉揚げ装置の走行状態と待機状態と異常状態と玉揚げ作業状態を判別することができる。
【0010】
また、上記構成(2)または(3)において、(4)異常状態は、機構異常状態および通信異常状態からなり、
玉揚げ制御部は、当該玉揚げ装置の機構異常状態において、各発光部を第2の発光色で点灯させ、当該玉揚げ装置の通信異常状態において、各発光部を第2の発光色で点滅させることが好ましい。
この構成によれば、各発光部の点灯点滅状態の違いによって、玉揚げ装置の機構異常状態と通信異常状態を判別することができる。
【0011】
また、上記構成(1)〜(4)のいずれかにおいて、(5)走行体フレームの正面カバーおよび各側面カバーの接合部には、それぞれコーナー部が形成されており、
各発光部は、コーナー部に設けられていることが好ましい。
この構成によれば、走行体フレームの各コーナー部に発光部を設けたので、正面および側面の両面からの視覚的な相乗効果がうまれ、当該玉揚げ装置から遠く離れた作業者でも、玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態をより容易に把握することができる。
【0012】
(6)上記構成(1)〜(5)のいずれかの玉揚げ装置を自動ワインダーに備えることもできる。
【発明の効果】
【0013】
本発明によれば、玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態を容易に把握することができる玉揚げ装置およびそれを備えた自動ワインダーを提供することができる。
【図面の簡単な説明】
【0014】
【図1】玉揚げ装置を備えた自動ワインダーを示す全体正面図である。
【図2】玉揚げ装置および巻取ユニットを示す側面図である。
【図3】玉揚げ装置を示す斜視図である。
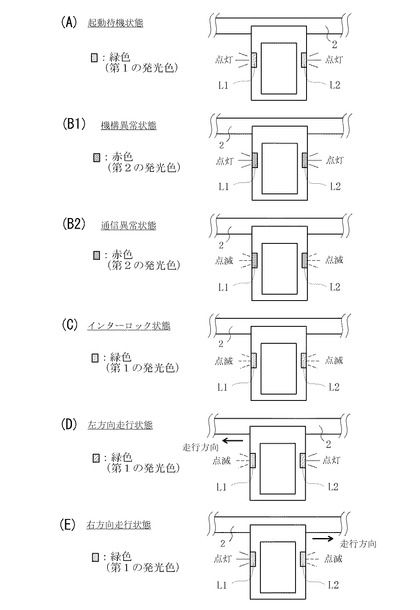
【図4】玉揚げ装置の発光部の発光状態(点灯点滅状態および発光色)を示す正面図であり、(A)は、玉揚げ装置の起動待機状態における発光部の発光状態、(B1)は、玉揚げ装置の機構異常状態における発光部の発光状態、(B2)は、玉揚げ装置の通信異常状態における発光部の発光状態、(C)は、玉揚げ装置のインターロック状態における発光部の発光状態、(D)は、玉揚げ装置の走行状態(左方向走行状態)における発光部の発光状態、(E)は、玉揚げ装置の走行状態(右方向走行状態)における発光部の発光状態を示すものである。
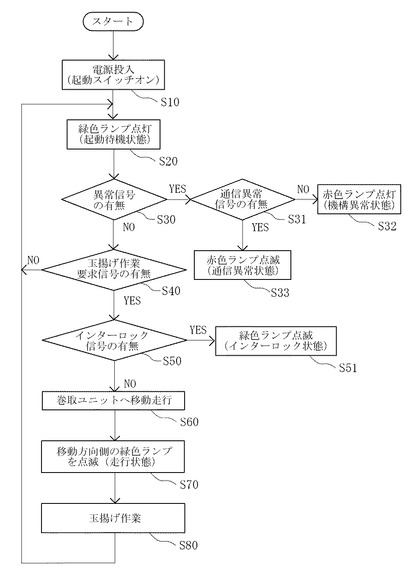
【図5】玉揚げ装置の玉揚げ制御部および発光部の動作を示すフローチャートである。
【図6】従来の玉揚げ装置を備えた自動ワインダーを示す全体正面図である。
【発明を実施するための形態】
【0015】
以下、本発明の好ましい実施例について図面を参照しながら説明する。
【0016】
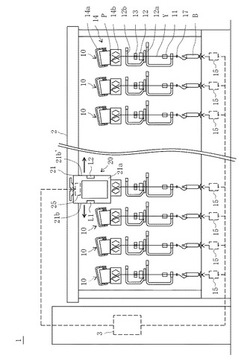
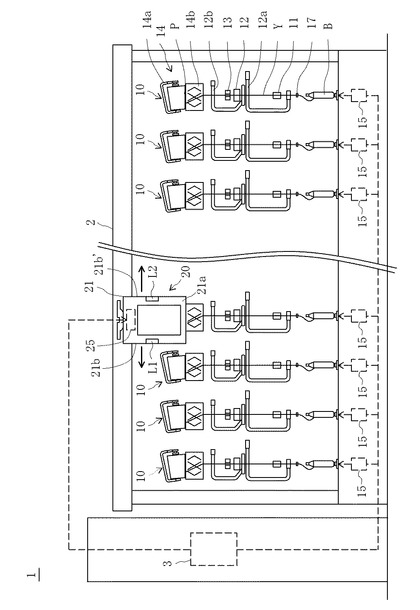
自動ワインダー(繊維機械)1は、精紡機等で生成された給糸ボビンBを巻き返して、パッケージPを形成する装置である。図1に示すように、この自動ワインダー1は、並設方向に複数並設された巻取ユニット10と、巻取ユニット10間を走行する玉揚げ装置20と、巻取ユニット10の列の一端側に配置された本体制御部3と、メインフレーム4とを備える。
【0017】
巻取ユニット10は、1本の巻取管Wに対して1個のパッケージPを形成する。図1および図2に示すように、この巻取ユニット10は、テンション装置11と、糸継ぎ装置(スプライサ)12と、糸欠陥検出装置(ヤーンクリアラ)13と、巻取装置14と、これらの装置11〜14を駆動するユニット制御部15と、巻取管収納部材(巻取管ストッカ)16とを備える。テンション装置11の下方には給糸ボビンBがセットされる。
【0018】
テンション装置11は、糸Yを挟み込んだ一対のディスク部材を回転させることで、走行する糸Yに所定の張力を付与するディスク式のものである。
【0019】
糸欠陥検出装置13は、糸Yの欠陥(例えば、スラブ等の糸欠点や糸切れ等)を検出するものである。糸欠陥検出装置13は、糸Yの欠陥を検出した場合、内蔵された糸切断用カッター(図示略)で糸Yの欠陥箇所を切断する。
【0020】
糸継ぎ装置12は、糸切れ時や糸欠陥検出装置13による糸Yの切断時において、給糸ボビンB側の糸Yと、パッケージP側の糸Yとを糸継ぎするものである。この糸継ぎ装置12の下側には、給糸ボビンB側の糸Yを吸引捕捉して当該糸継ぎ装置12に案内するサクションパイプ12aが配置され、糸継ぎ装置12の上側には、パッケージP側の糸Yを吸引補足して当該糸継ぎ装置12に案内するサクションマウス12bが配置される。糸継ぎ装置12は、これらの案内された糸Yを糸継ぎする。
【0021】
巻取装置14は、給糸ボビンBからの糸YをパッケージPに巻き返すものである。巻取装置14は、パッケージPを巻きつける巻取管Wを支持するクレードル14aと、巻取管WまたはパッケージPに接触して回転駆動するドラム14bとを備える。給糸ボビンBからの糸Yは、ドラム14bの回転駆動に追従して綾振り(トラバース)されながら解舒されて、パッケージPに巻き返される。この際、解舒バルーンが、ヤーンガイド17およびテンション装置11によって安定化される。
【0022】
玉揚げ装置20は、所定の待機位置から、各巻取ユニット10を横切るレール2(2a、2b)に沿って、満巻パッケージPを生成した巻取ユニット10へと走行し、満巻パッケージPを所定の場所へ移動させるとともに、新たなパッケージPを形成するための巻取管Wを当該巻取ユニット10に装着する、所謂玉揚げ作業を行うものである。この玉揚げ装置20は、走行状態(玉揚げ装置20が巻取ユニット10間を走行している状態)、待機状態(玉揚げ装置20が起動後に待機位置にいる起動待機状態、および玉揚げ装置が当該玉揚げ装置以外の装置の動作完了を待っているインターロック状態)、異常状態(装置に異常(機構異常や通信異常)が生じて玉揚げ装置20が走行停止している状態)等といった様々な動作状態をとる。
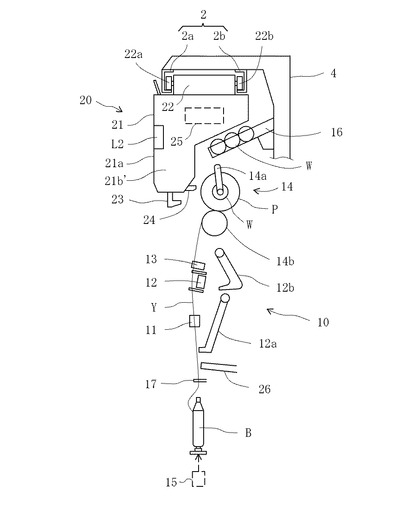
図2および図3に示すように、この玉揚げ装置20は、走行体フレーム21と、発光部L1、L2と、走行装置22と、糸把持装置23と、糸搬送レバー24と、玉揚げ制御部25とを備える。
【0023】
走行体フレーム21は、玉揚げ装置20の外周部を形成するフレームであって、正面を覆う正面カバー21a、および両側面を覆う一対の側面カバー21b、21b’を備える。ここで、正面とは、作業者に向く方向に形成された面(巻取ユニット10の並設方向に沿って形成された面)を意味する。また、側面とは、巻取ユニット10の並設方向に直交する方向に形成された面を意味する。
【0024】
発光部L1、L2は、いずれも、玉揚げ装置20の上記各種動作状態に応じて、発光状態(点灯点滅状態および/または発光色)が変化する例えばLEDランプ等の光源からなる。発光部(第1発光部)L1は、走行体フレーム21の一方の側面カバー21bと正面カバー21aの接合部に形成されたコーナー部(第1コーナー部)に設けられている。また、発光部(第2発光部)L2は、走行体フレーム21の他方の側面カバー21b’と正面カバー21aの接合部に形成されたコーナー部(第2コーナー部)に設けられている。
【0025】
走行装置22は、レール2(2a、2b)に沿って玉揚げ装置20を走行させるものであって、駆動モータ機構(図示略)と、車輪22a、22bとを備える。
【0026】
糸把持装置23は、糸吸引捕捉ノズル26により捕捉された糸Yを切断して把持するものであって、カッター(図示略)を内蔵し、下方に延びるように構成されている。また、糸搬送レバー24は、回動して糸把持装置23が把持する糸Yを引き取るものである。
【0027】
玉揚げ制御部25は、玉揚げ装置20の動作を制御するとともに、発光部L1、L2の発光状態を制御する。
【0028】
本体制御部3は、自動ワインダー1の全体を総括管理するものであり、ユニット制御部15および玉揚げ制御部25と互いに通信可能に構成されている。
【0029】
次に、玉揚げ装置20の発光部L1、L2の発光動作、および玉揚げ制御部25の動作について説明する。
まず、電源投入を行うために玉揚げ装置20の起動スイッチ(図示略)が押される(図5のステップS10参照)と、玉揚げ制御部25は、図4(A)に示すように、発光ランプL1、L2をいずれも緑色(第1の発光色)で点灯させる(図5のステップS20参照)。これによって、作業者は、玉揚げ装置20が起動待機状態であることを容易に把握できる。
【0030】
次に、玉揚げ制御部25は、本体制御部3を介して送られてくる自動ワインダー1(巻取ユニット10や玉揚げ装置20)からの異常信号の有無を判断する(図5のステップS30参照)。玉揚げ制御部25は、異常信号を受けた場合、図4(B1)または(B2)に示すように、発光ランプL1、L2をいずれも緑色とは異なる赤色(第2の発光色)で発光させる(図5のステップS32または33参照)。これによって、作業者は、玉揚げ装置20が異常状態であることを容易に把握できる。なお、玉揚げ装置20は、異常信号を受けた場合には、走行停止するようになっている。
この異常信号としては、例えば本体制御部3、ユニット制御部15および玉揚げ制御部25間の通信異常を示す通信異常信号がある。玉揚げ制御部25は、通信異常信号の有無を判定し(図5のステップS31参照)、通信異常信号を受けない場合、図4(B1)に示すように、発光ランプL1、L2を赤色で点灯させる(図5のステップS32参照)一方、通信異常を示す通信異常信号を受けた場合、図4(B2)に示すように、発光ランプL1、L2を赤色で点滅させる(図5のステップS33参照)。
【0031】
玉揚げ制御部25は、自動ワインダー1からの異常信号を受けない場合、巻取ユニット10から本体制御部3を介して送られてくる玉揚げ作業要求信号の有無を判断する(図5のステップS40参照)。
玉揚げ制御部25は、玉揚げ作業要求信号を受けない場合、図4(A)に示すように、発光ランプL1、L2をいずれも緑色で点灯させたままとする(図5のステップS20参照)。玉揚げ制御部25は、玉揚げ作業要求信号を受けた場合、本体制御部3を介して送られてくるインターロック信号の有無を判断する(図5のステップS50参照)。このインターロック信号は、例えばパッケージコンベア(図示略)による満巻パッケージPの搬送動作が完了するまで玉揚げ装置20を待機させるための信号である。なお、上記のステップS30、S40、S50の順番は、この順に限定されるものではなく、入れ替わっていてもよい。
玉揚げ制御部25は、インターロック信号を受けた場合、図4(C)に示すように、発光ランプL1、L2を緑色で点滅させる(図5のステップS51参照)。
【0032】
玉揚げ制御部25は、インターロック信号を受けない場合、玉揚げ作業要求信号を送ってきた該当する巻取ユニット10に向かって移動走行する(図5のステップS60参照)。
玉揚げ制御部25は、玉揚げ装置20が図1の左方向に走行する場合、図4(D)に示すように、走行方向(移動方向)である左側の発光ランプL1を緑色で点滅させる(図5のステップS70参照)。この時、反対側の発光ランプL2は緑色で点灯したままである。
一方、玉揚げ制御部25は、玉揚げ装置20が図1の右方向に走行する場合、図4(E)に示すように、走行方向である右側の発光ランプL2を緑色で点滅させる(図5のステップS70参照)。この時、反対側の発光ランプL1は緑色で点灯したままである。
これによって、作業者は、玉揚げ装置20が走行状態であること(玉揚げ装置20の走行方向)を容易に把握できる。
【0033】
そして、玉揚げ装置20が巻取ユニット10に到着して走行停止して、玉揚げ作業を行う(図5のステップS80参照)。この時、玉揚げ制御部25は、図4(A)に示すように、発光ランプL1、L2をいずれも緑色に点灯させている(図5のステップS20参照)。
【0034】
したがって、本発明によれば、走行体フレーム21の正面フレーム21aの両側に発光部L1,L2を設けて、玉揚げ制御部25によって、玉揚げ装置20の走行時に、その走行方向の発光部L1またはL2を点滅させるようになっているので、玉揚げ装置20から遠く離れた作業者でも、玉揚げ装置20の走行状態における走行方向を容易に把握することができる。
【0035】
また、図4(A)、(B1)、(B2)および(C)から明らかなように、各発光部L1、L2の発光色の違い(緑色と赤色)によって、玉揚げ装置20の待機状態と異常状態を判別することができる。
また、図4(B1)および(B2)から明らかなように、各発光部L1、L2の点灯点滅状態の違いによって、玉揚げ装置20の機構待機状態と通信異常状態を判別することができる。
また、図4(A)および(C)から明らかなように、各発光部L1、L2の点灯点滅状態の違いによって、玉揚げ装置20の起動待機状態とインターロック状態を判別することができる。
また、図4(A)〜(E)から明らかなように、各発光部L1、L2の点灯点滅状態または発光色の違いによって、玉揚げ装置20の走行状態と待機状態と異常状態とを判別することができる。
【0036】
さらに、走行体フレーム21の各コーナー部に発光部L1、L2を設けたので、側面フレーム21b、21b’(側面)および正面フレーム21a(正面)の各両面からの視覚的な相乗効果がうまれ、当該玉揚げ装置20から遠く離れた作業者でも、玉揚げ装置20の走行状態、待機状態、異常状態といった各種動作状態をより容易に把握することができる。
【0037】
以上、本発明に係る玉揚げ装置およびそれを備えた自動ワインダーの好ましい実施形態について説明したが、本発明は上記の構成に限定されるものではない。
例えば、上述した発光部の個数、配置場所、点灯点滅状態(点灯時の光量や点滅周期も含む)、発光色および光源の種類、ならびに、巻取装置および玉揚げ装置の種類等は、適宜変更することができる。
【符号の説明】
【0038】
1 自動ワインダー
2、2a、2b レール
3 本体制御部
4 メインフレーム
10 巻取ユニット
11 テンション装置
12 糸継ぎ装置
12a サクションパイプ
12b サクションマウス
13 糸欠陥検出装置
14 巻取装置
15 ユニット制御部
16 巻取管収納部材
17 ヤーンガイド
20 玉揚げ装置
21 走行体フレーム
21a 正面カバー
21b、21b’ 側面カバー
22 走行装置
22a、22b 車輪
23 糸把持装置
24 糸搬送レバー
25 玉揚げ制御部
26 糸吸引捕捉ノズル
100 自動ワインダー
200 玉揚げ装置
B 給糸ボビン
L1,L2 発光部
P パッケージ
SW 起動スイッチ
W 巻取管
【技術分野】
【0001】
本発明は、玉揚げ装置およびそれを備えた自動ワインダーに関するものである。
【背景技術】
【0002】
従来、複数並設された巻取ユニット間を走行して、巻取ユニットに対して玉揚げ作業を行う玉揚げ装置(作業台車)およびそれを備えた自動ワインダーが知られている(例えば特許文献1参照)。
図6に示すように、この自動ワインダー100の玉揚げ装置200は、所定の待機位置から、各巻取ユニット10を横切るレール2に沿って、満巻パッケージPを生成した巻取ユニット10へと走行し、満巻パッケージPを所定の場所へ移動させるとともに、新たなパッケージPを形成するための巻取管を当該巻取ユニット10に装着する、所謂玉揚げ作業を行うものである。
【0003】
ところで、この玉揚げ装置は、走行状態(玉揚げ装置が巻取ユニット間を走行している状態)、待機状態(玉揚げ装置が起動後に待機位置にいる起動待機状態、および玉揚げ装置が当該玉揚げ装置以外の装置の動作完了を待っているインターロック状態)、異常状態(装置に異常(機構異常や通信異常等)が生じている状態)等といった様々な動作状態をとりうるものであるが、これらの各種動作状態を容易に把握することのできる玉揚げ装置およびそれを備えた自動ワインダーは、これまで存在しなかった。
【0004】
なお、この玉揚げ装置200の中には、図6に示すような発光式の起動スイッチSWを備えたものがある。しかしながら、この玉揚げ装置200では、この起動スイッチSWの発光によって、玉揚げ装置200が起動状態(電源投入状態)にあるか否か、あるいは、玉揚げ装置200が異常状態にあるか否かを把握できる程度であって、玉揚げ装置特有の上記の走行状態や待機状態といった動作状態を判別することはできなかった。また、この玉揚げ装置200では、発光式の起動スイッチSWはそのサイズや光量が極めて小さいものであり、玉揚げ装置200から遠く離れた作業者は、その発光状態を認識することができなかった。さらに、玉揚げ装置200を監視する作業者は玉揚げ装置200の近傍にいることが多く、玉揚げ装置200が往復走行している状態では、予期せぬ接触により玉揚げ作業を中断させてしまうことがあった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−137539号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態を容易に把握することができる玉揚げ装置およびそれを備えた自動ワインダーを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明は、(1)複数並設された巻取ユニット間を並設方向に走行し、巻取ユニットに対して玉揚げ作業を行う玉揚げ装置において、
正面を覆う正面カバー、および両側面を覆う一対の側面カバーを備えた走行体フレームと、
走行体フレームの正面カバーの両側にそれぞれ設けられた発光部と、
各発光部の発光状態を制御する玉揚げ制御部とを備え、
玉揚げ制御部は、当該玉揚げ装置の走行時に、その走行方向の発光部を点滅させることとしたものである。
この構成によれば、走行体フレームの正面カバーの両側に発光部を設けて、玉揚げ制御部によって、玉揚げ装置の走行時に、その走行方向の発光部を点滅させるようになっているので、玉揚げ装置から遠く離れた作業者でも、玉揚げ装置の走行状態における走行方向を容易に把握することができる。ここで、正面とは、作業者に向く方向に形成された面(巻取ユニットの並設方向に沿って形成された面)を意味する。また、側面とは、巻取ユニットの並設方向に直交する方向に形成された面を意味する。
【0008】
また、上記構成(1)において、(2)発光部は、第1の発光色と第2の発光色とを切り替え可能であって、
玉揚げ制御部は、当該玉揚げ装置の待機状態において、各発光部を第1の発光色で発光させ、当該玉揚げ装置の異常状態において、各発光部を第2の発光色で発光させることが好ましい。
この構成によれば、各発光部の発光色の違いによって、玉揚げ装置の待機状態と異常状態を判別することができる。
【0009】
また、上記構成(2)において、(3)待機状態は、起動待機状態およびインターロック状態からなり、
玉揚げ制御部は、当該玉揚げ装置の起動待機状態において、各発光部を第1の発光色で点灯させ、当該玉揚げ装置のインターロック状態において、各発光部を第1の発光色で点滅させることが好ましい。
この構成によれば、各発光部の点灯点滅状態の違いによって、玉揚げ装置の起動待機状態とインターロック状態を判別することができる。各発光部の点灯点滅状態または発光色の違いによって、玉揚げ装置の走行状態と待機状態と異常状態と玉揚げ作業状態を判別することができる。
【0010】
また、上記構成(2)または(3)において、(4)異常状態は、機構異常状態および通信異常状態からなり、
玉揚げ制御部は、当該玉揚げ装置の機構異常状態において、各発光部を第2の発光色で点灯させ、当該玉揚げ装置の通信異常状態において、各発光部を第2の発光色で点滅させることが好ましい。
この構成によれば、各発光部の点灯点滅状態の違いによって、玉揚げ装置の機構異常状態と通信異常状態を判別することができる。
【0011】
また、上記構成(1)〜(4)のいずれかにおいて、(5)走行体フレームの正面カバーおよび各側面カバーの接合部には、それぞれコーナー部が形成されており、
各発光部は、コーナー部に設けられていることが好ましい。
この構成によれば、走行体フレームの各コーナー部に発光部を設けたので、正面および側面の両面からの視覚的な相乗効果がうまれ、当該玉揚げ装置から遠く離れた作業者でも、玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態をより容易に把握することができる。
【0012】
(6)上記構成(1)〜(5)のいずれかの玉揚げ装置を自動ワインダーに備えることもできる。
【発明の効果】
【0013】
本発明によれば、玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態を容易に把握することができる玉揚げ装置およびそれを備えた自動ワインダーを提供することができる。
【図面の簡単な説明】
【0014】
【図1】玉揚げ装置を備えた自動ワインダーを示す全体正面図である。
【図2】玉揚げ装置および巻取ユニットを示す側面図である。
【図3】玉揚げ装置を示す斜視図である。
【図4】玉揚げ装置の発光部の発光状態(点灯点滅状態および発光色)を示す正面図であり、(A)は、玉揚げ装置の起動待機状態における発光部の発光状態、(B1)は、玉揚げ装置の機構異常状態における発光部の発光状態、(B2)は、玉揚げ装置の通信異常状態における発光部の発光状態、(C)は、玉揚げ装置のインターロック状態における発光部の発光状態、(D)は、玉揚げ装置の走行状態(左方向走行状態)における発光部の発光状態、(E)は、玉揚げ装置の走行状態(右方向走行状態)における発光部の発光状態を示すものである。
【図5】玉揚げ装置の玉揚げ制御部および発光部の動作を示すフローチャートである。
【図6】従来の玉揚げ装置を備えた自動ワインダーを示す全体正面図である。
【発明を実施するための形態】
【0015】
以下、本発明の好ましい実施例について図面を参照しながら説明する。
【0016】
自動ワインダー(繊維機械)1は、精紡機等で生成された給糸ボビンBを巻き返して、パッケージPを形成する装置である。図1に示すように、この自動ワインダー1は、並設方向に複数並設された巻取ユニット10と、巻取ユニット10間を走行する玉揚げ装置20と、巻取ユニット10の列の一端側に配置された本体制御部3と、メインフレーム4とを備える。
【0017】
巻取ユニット10は、1本の巻取管Wに対して1個のパッケージPを形成する。図1および図2に示すように、この巻取ユニット10は、テンション装置11と、糸継ぎ装置(スプライサ)12と、糸欠陥検出装置(ヤーンクリアラ)13と、巻取装置14と、これらの装置11〜14を駆動するユニット制御部15と、巻取管収納部材(巻取管ストッカ)16とを備える。テンション装置11の下方には給糸ボビンBがセットされる。
【0018】
テンション装置11は、糸Yを挟み込んだ一対のディスク部材を回転させることで、走行する糸Yに所定の張力を付与するディスク式のものである。
【0019】
糸欠陥検出装置13は、糸Yの欠陥(例えば、スラブ等の糸欠点や糸切れ等)を検出するものである。糸欠陥検出装置13は、糸Yの欠陥を検出した場合、内蔵された糸切断用カッター(図示略)で糸Yの欠陥箇所を切断する。
【0020】
糸継ぎ装置12は、糸切れ時や糸欠陥検出装置13による糸Yの切断時において、給糸ボビンB側の糸Yと、パッケージP側の糸Yとを糸継ぎするものである。この糸継ぎ装置12の下側には、給糸ボビンB側の糸Yを吸引捕捉して当該糸継ぎ装置12に案内するサクションパイプ12aが配置され、糸継ぎ装置12の上側には、パッケージP側の糸Yを吸引補足して当該糸継ぎ装置12に案内するサクションマウス12bが配置される。糸継ぎ装置12は、これらの案内された糸Yを糸継ぎする。
【0021】
巻取装置14は、給糸ボビンBからの糸YをパッケージPに巻き返すものである。巻取装置14は、パッケージPを巻きつける巻取管Wを支持するクレードル14aと、巻取管WまたはパッケージPに接触して回転駆動するドラム14bとを備える。給糸ボビンBからの糸Yは、ドラム14bの回転駆動に追従して綾振り(トラバース)されながら解舒されて、パッケージPに巻き返される。この際、解舒バルーンが、ヤーンガイド17およびテンション装置11によって安定化される。
【0022】
玉揚げ装置20は、所定の待機位置から、各巻取ユニット10を横切るレール2(2a、2b)に沿って、満巻パッケージPを生成した巻取ユニット10へと走行し、満巻パッケージPを所定の場所へ移動させるとともに、新たなパッケージPを形成するための巻取管Wを当該巻取ユニット10に装着する、所謂玉揚げ作業を行うものである。この玉揚げ装置20は、走行状態(玉揚げ装置20が巻取ユニット10間を走行している状態)、待機状態(玉揚げ装置20が起動後に待機位置にいる起動待機状態、および玉揚げ装置が当該玉揚げ装置以外の装置の動作完了を待っているインターロック状態)、異常状態(装置に異常(機構異常や通信異常)が生じて玉揚げ装置20が走行停止している状態)等といった様々な動作状態をとる。
図2および図3に示すように、この玉揚げ装置20は、走行体フレーム21と、発光部L1、L2と、走行装置22と、糸把持装置23と、糸搬送レバー24と、玉揚げ制御部25とを備える。
【0023】
走行体フレーム21は、玉揚げ装置20の外周部を形成するフレームであって、正面を覆う正面カバー21a、および両側面を覆う一対の側面カバー21b、21b’を備える。ここで、正面とは、作業者に向く方向に形成された面(巻取ユニット10の並設方向に沿って形成された面)を意味する。また、側面とは、巻取ユニット10の並設方向に直交する方向に形成された面を意味する。
【0024】
発光部L1、L2は、いずれも、玉揚げ装置20の上記各種動作状態に応じて、発光状態(点灯点滅状態および/または発光色)が変化する例えばLEDランプ等の光源からなる。発光部(第1発光部)L1は、走行体フレーム21の一方の側面カバー21bと正面カバー21aの接合部に形成されたコーナー部(第1コーナー部)に設けられている。また、発光部(第2発光部)L2は、走行体フレーム21の他方の側面カバー21b’と正面カバー21aの接合部に形成されたコーナー部(第2コーナー部)に設けられている。
【0025】
走行装置22は、レール2(2a、2b)に沿って玉揚げ装置20を走行させるものであって、駆動モータ機構(図示略)と、車輪22a、22bとを備える。
【0026】
糸把持装置23は、糸吸引捕捉ノズル26により捕捉された糸Yを切断して把持するものであって、カッター(図示略)を内蔵し、下方に延びるように構成されている。また、糸搬送レバー24は、回動して糸把持装置23が把持する糸Yを引き取るものである。
【0027】
玉揚げ制御部25は、玉揚げ装置20の動作を制御するとともに、発光部L1、L2の発光状態を制御する。
【0028】
本体制御部3は、自動ワインダー1の全体を総括管理するものであり、ユニット制御部15および玉揚げ制御部25と互いに通信可能に構成されている。
【0029】
次に、玉揚げ装置20の発光部L1、L2の発光動作、および玉揚げ制御部25の動作について説明する。
まず、電源投入を行うために玉揚げ装置20の起動スイッチ(図示略)が押される(図5のステップS10参照)と、玉揚げ制御部25は、図4(A)に示すように、発光ランプL1、L2をいずれも緑色(第1の発光色)で点灯させる(図5のステップS20参照)。これによって、作業者は、玉揚げ装置20が起動待機状態であることを容易に把握できる。
【0030】
次に、玉揚げ制御部25は、本体制御部3を介して送られてくる自動ワインダー1(巻取ユニット10や玉揚げ装置20)からの異常信号の有無を判断する(図5のステップS30参照)。玉揚げ制御部25は、異常信号を受けた場合、図4(B1)または(B2)に示すように、発光ランプL1、L2をいずれも緑色とは異なる赤色(第2の発光色)で発光させる(図5のステップS32または33参照)。これによって、作業者は、玉揚げ装置20が異常状態であることを容易に把握できる。なお、玉揚げ装置20は、異常信号を受けた場合には、走行停止するようになっている。
この異常信号としては、例えば本体制御部3、ユニット制御部15および玉揚げ制御部25間の通信異常を示す通信異常信号がある。玉揚げ制御部25は、通信異常信号の有無を判定し(図5のステップS31参照)、通信異常信号を受けない場合、図4(B1)に示すように、発光ランプL1、L2を赤色で点灯させる(図5のステップS32参照)一方、通信異常を示す通信異常信号を受けた場合、図4(B2)に示すように、発光ランプL1、L2を赤色で点滅させる(図5のステップS33参照)。
【0031】
玉揚げ制御部25は、自動ワインダー1からの異常信号を受けない場合、巻取ユニット10から本体制御部3を介して送られてくる玉揚げ作業要求信号の有無を判断する(図5のステップS40参照)。
玉揚げ制御部25は、玉揚げ作業要求信号を受けない場合、図4(A)に示すように、発光ランプL1、L2をいずれも緑色で点灯させたままとする(図5のステップS20参照)。玉揚げ制御部25は、玉揚げ作業要求信号を受けた場合、本体制御部3を介して送られてくるインターロック信号の有無を判断する(図5のステップS50参照)。このインターロック信号は、例えばパッケージコンベア(図示略)による満巻パッケージPの搬送動作が完了するまで玉揚げ装置20を待機させるための信号である。なお、上記のステップS30、S40、S50の順番は、この順に限定されるものではなく、入れ替わっていてもよい。
玉揚げ制御部25は、インターロック信号を受けた場合、図4(C)に示すように、発光ランプL1、L2を緑色で点滅させる(図5のステップS51参照)。
【0032】
玉揚げ制御部25は、インターロック信号を受けない場合、玉揚げ作業要求信号を送ってきた該当する巻取ユニット10に向かって移動走行する(図5のステップS60参照)。
玉揚げ制御部25は、玉揚げ装置20が図1の左方向に走行する場合、図4(D)に示すように、走行方向(移動方向)である左側の発光ランプL1を緑色で点滅させる(図5のステップS70参照)。この時、反対側の発光ランプL2は緑色で点灯したままである。
一方、玉揚げ制御部25は、玉揚げ装置20が図1の右方向に走行する場合、図4(E)に示すように、走行方向である右側の発光ランプL2を緑色で点滅させる(図5のステップS70参照)。この時、反対側の発光ランプL1は緑色で点灯したままである。
これによって、作業者は、玉揚げ装置20が走行状態であること(玉揚げ装置20の走行方向)を容易に把握できる。
【0033】
そして、玉揚げ装置20が巻取ユニット10に到着して走行停止して、玉揚げ作業を行う(図5のステップS80参照)。この時、玉揚げ制御部25は、図4(A)に示すように、発光ランプL1、L2をいずれも緑色に点灯させている(図5のステップS20参照)。
【0034】
したがって、本発明によれば、走行体フレーム21の正面フレーム21aの両側に発光部L1,L2を設けて、玉揚げ制御部25によって、玉揚げ装置20の走行時に、その走行方向の発光部L1またはL2を点滅させるようになっているので、玉揚げ装置20から遠く離れた作業者でも、玉揚げ装置20の走行状態における走行方向を容易に把握することができる。
【0035】
また、図4(A)、(B1)、(B2)および(C)から明らかなように、各発光部L1、L2の発光色の違い(緑色と赤色)によって、玉揚げ装置20の待機状態と異常状態を判別することができる。
また、図4(B1)および(B2)から明らかなように、各発光部L1、L2の点灯点滅状態の違いによって、玉揚げ装置20の機構待機状態と通信異常状態を判別することができる。
また、図4(A)および(C)から明らかなように、各発光部L1、L2の点灯点滅状態の違いによって、玉揚げ装置20の起動待機状態とインターロック状態を判別することができる。
また、図4(A)〜(E)から明らかなように、各発光部L1、L2の点灯点滅状態または発光色の違いによって、玉揚げ装置20の走行状態と待機状態と異常状態とを判別することができる。
【0036】
さらに、走行体フレーム21の各コーナー部に発光部L1、L2を設けたので、側面フレーム21b、21b’(側面)および正面フレーム21a(正面)の各両面からの視覚的な相乗効果がうまれ、当該玉揚げ装置20から遠く離れた作業者でも、玉揚げ装置20の走行状態、待機状態、異常状態といった各種動作状態をより容易に把握することができる。
【0037】
以上、本発明に係る玉揚げ装置およびそれを備えた自動ワインダーの好ましい実施形態について説明したが、本発明は上記の構成に限定されるものではない。
例えば、上述した発光部の個数、配置場所、点灯点滅状態(点灯時の光量や点滅周期も含む)、発光色および光源の種類、ならびに、巻取装置および玉揚げ装置の種類等は、適宜変更することができる。
【符号の説明】
【0038】
1 自動ワインダー
2、2a、2b レール
3 本体制御部
4 メインフレーム
10 巻取ユニット
11 テンション装置
12 糸継ぎ装置
12a サクションパイプ
12b サクションマウス
13 糸欠陥検出装置
14 巻取装置
15 ユニット制御部
16 巻取管収納部材
17 ヤーンガイド
20 玉揚げ装置
21 走行体フレーム
21a 正面カバー
21b、21b’ 側面カバー
22 走行装置
22a、22b 車輪
23 糸把持装置
24 糸搬送レバー
25 玉揚げ制御部
26 糸吸引捕捉ノズル
100 自動ワインダー
200 玉揚げ装置
B 給糸ボビン
L1,L2 発光部
P パッケージ
SW 起動スイッチ
W 巻取管
【特許請求の範囲】
【請求項1】
複数並設された巻取ユニット間を並設方向に走行し、前記巻取ユニットに対して玉揚げ作業を行う玉揚げ装置において、
正面を覆う正面カバー、および両側面を覆う一対の側面カバーを備えた走行体フレームと、
前記走行体フレームの正面カバーの両側にそれぞれ設けられた発光部と、
前記各発光部の発光状態を制御する玉揚げ制御部とを備え、
前記玉揚げ制御部は、当該玉揚げ装置の走行時に、その走行方向の発光部を点滅させることを特徴とする玉揚げ装置。
【請求項2】
前記発光部は、第1の発光色と第2の発光色とを切り替え可能であって、
前記玉揚げ制御部は、当該玉揚げ装置の待機状態において、前記各発光部を前記第1の発光色で発光させ、当該玉揚げ装置の異常状態において、前記各発光部を前記第2の発光色で発光させることを特徴とする請求項1に記載の玉揚げ装置。
【請求項3】
前記待機状態は、起動待機状態およびインターロック状態からなり、
前記玉揚げ制御部は、当該玉揚げ装置の前記起動待機状態において、前記各発光部を前記第1の発光色で点灯させ、当該玉揚げ装置の前記インターロック状態において、前記各発光部を前記第1の発光色で点滅させることを特徴とする請求項2に記載の玉揚げ装置。
【請求項4】
前記異常状態は、機構異常状態および通信異常状態からなり、
前記玉揚げ制御部は、当該玉揚げ装置の前記機構異常状態において、前記各発光部を前記第2の発光色で点灯させ、当該玉揚げ装置の前記通信異常状態において、前記各発光部を前記第2の発光色で点滅させることを特徴とする請求項2または3に記載の玉揚げ装置。
【請求項5】
前記走行体フレームの正面カバーおよび各側面カバーの接合部には、それぞれコーナー部が形成されており、
前記各発光部は、前記コーナー部に設けられていることを特徴とする請求項1〜4のいずれかに記載の玉揚げ装置。
【請求項6】
請求項1〜5のいずれかの玉揚げ装置を備えた自動ワインダー。
【請求項1】
複数並設された巻取ユニット間を並設方向に走行し、前記巻取ユニットに対して玉揚げ作業を行う玉揚げ装置において、
正面を覆う正面カバー、および両側面を覆う一対の側面カバーを備えた走行体フレームと、
前記走行体フレームの正面カバーの両側にそれぞれ設けられた発光部と、
前記各発光部の発光状態を制御する玉揚げ制御部とを備え、
前記玉揚げ制御部は、当該玉揚げ装置の走行時に、その走行方向の発光部を点滅させることを特徴とする玉揚げ装置。
【請求項2】
前記発光部は、第1の発光色と第2の発光色とを切り替え可能であって、
前記玉揚げ制御部は、当該玉揚げ装置の待機状態において、前記各発光部を前記第1の発光色で発光させ、当該玉揚げ装置の異常状態において、前記各発光部を前記第2の発光色で発光させることを特徴とする請求項1に記載の玉揚げ装置。
【請求項3】
前記待機状態は、起動待機状態およびインターロック状態からなり、
前記玉揚げ制御部は、当該玉揚げ装置の前記起動待機状態において、前記各発光部を前記第1の発光色で点灯させ、当該玉揚げ装置の前記インターロック状態において、前記各発光部を前記第1の発光色で点滅させることを特徴とする請求項2に記載の玉揚げ装置。
【請求項4】
前記異常状態は、機構異常状態および通信異常状態からなり、
前記玉揚げ制御部は、当該玉揚げ装置の前記機構異常状態において、前記各発光部を前記第2の発光色で点灯させ、当該玉揚げ装置の前記通信異常状態において、前記各発光部を前記第2の発光色で点滅させることを特徴とする請求項2または3に記載の玉揚げ装置。
【請求項5】
前記走行体フレームの正面カバーおよび各側面カバーの接合部には、それぞれコーナー部が形成されており、
前記各発光部は、前記コーナー部に設けられていることを特徴とする請求項1〜4のいずれかに記載の玉揚げ装置。
【請求項6】
請求項1〜5のいずれかの玉揚げ装置を備えた自動ワインダー。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−67455(P2013−67455A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205801(P2011−205801)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]