
玉軸受のボール位相検出方法
【課題】安価なセンサと信号処理によって、正確にボールの位相を検出することができる玉軸受のボール位相検出方法を提供する。
【解決手段】玉軸受1のボール位相検出方法は、センサ13が軸受1の軸方向側方で対向するようにセンサ13及び軸受1を設置する工程と、軸受1を回転させながら、軸受1内に挿入されたボール4又は保持器5とセンサ13との距離に応じた信号を検出する工程と、検出された信号を、軸受1の回転角度情報と共に、制御装置14に出力する工程と、制御装置14にて、検出された信号から最小二乗法を用いて2次関数を求め、ボール4の頂点位置を判断する工程と、を備える。
【解決手段】玉軸受1のボール位相検出方法は、センサ13が軸受1の軸方向側方で対向するようにセンサ13及び軸受1を設置する工程と、軸受1を回転させながら、軸受1内に挿入されたボール4又は保持器5とセンサ13との距離に応じた信号を検出する工程と、検出された信号を、軸受1の回転角度情報と共に、制御装置14に出力する工程と、制御装置14にて、検出された信号から最小二乗法を用いて2次関数を求め、ボール4の頂点位置を判断する工程と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、玉軸受のボール位相検出方法に関する。
【背景技術】
【0002】
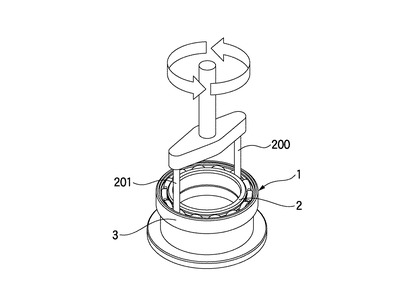
従来、玉軸受の製造や検査等において、玉の位相を検出することが要求されており、種々の方法により行なわれている。第1の方法としては、図5に示すように、カメラ100により、軸受1の画像を取り込み、画像処理を行なう事で軸受1のボールの位置を求め、位相を検出している。第2の方法では、変位センサや光電センサを用い、光量、又は変位情報のみに閾値を設け、この値によりボールの位置を求める。第3の方法では、図6に示すように、位置決めピン200,201を使用し、このピン200,201を揺動させながら軸受1の内輪2と外輪3の間に下降させ、ボールとボールとの間にピン200,201を挿入することでボールの位相を合わせている。なお、出願人は、提示すべきこれらの方法に関する先行技術文献を見出せなかった。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、第1の方法では、装置が複雑になり、価格が高くなるという問題がある。また、第2の方法では、対象物の光沢や油付着等の要因により誤検出が多く、装置稼働率低下の原因となっていた。第3の方法では、ピン200,201がボール頂点に下降した場合には、位相を合わせることができず、また、軸受1と接触して強制的に位相を合わせるので、ゴミが発生する等の問題がある。
【0004】
本発明は、上述した課題に鑑みて為されたものであり、その目的は、安価なセンサと信号処理によって、正確にボールの位相を検出することができる玉軸受のボール位相検出方法を提供することにある。
【課題を解決するための手段】
【0005】
(1) センサが軸受の軸方向側方で対向するように前記センサ及び前記軸受を設置する工程と、
前記軸受を回転させながら、前記軸受内に挿入されたボール又は保持器と前記センサとの距離に応じた信号を検出する工程と、
前記検出された信号と前記軸受の回転角度情報とを制御装置に取り込む工程と、
前記制御装置にて、前記検出された信号から最小二乗法を用いて2次関数を求め、前記ボールの頂点位置を判断する工程と、
を備えることを特徴とする玉軸受のボール位相検出方法。
なお、「ボールの頂点位置」とは、センサとの距離が最も近いボール上の位置を意味し、保持器とセンサとの距離を検出する場合には、ボールの頂点位置は、検出された保持器とセンサとの距離が最も近い保持器の頂点位置に基づいて判断される。
【発明の効果】
【0006】
本発明の玉軸受のボール位相検出方法によれば、センサを用いて、軸受を回転させながら、軸受内に挿入されたボール又は保持器とセンサとの距離に応じた信号を検出し、制御装置にて、検出された信号から最小二乗法を用いて2次関数を求め、ボールの頂点位置を判断するようにしたので、ノイズに影響されずに安定してボールの頂点位置を求めることができ、玉の位相を正確に且つ安価に検出することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明に係る玉軸受の位相検出方法について、図面を参照して詳細に説明する。
【0008】
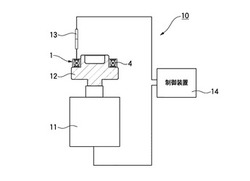
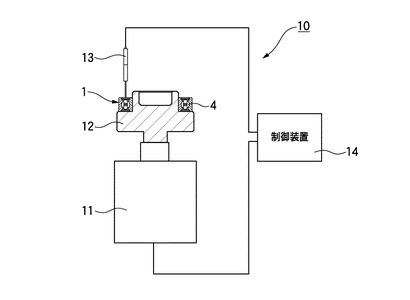
図1及び図2に示すように、本発明の位相検出装置10は、モータ11によって治工具12上に配置される玉軸受1を回転駆動すると共に、玉軸受1の軸方向側面に対向配置されてボール4の位相情報を検出するセンサ13を備える。また、これらモータ11及びセンサ13は、制御装置14と電気的に接続されている。
【0009】
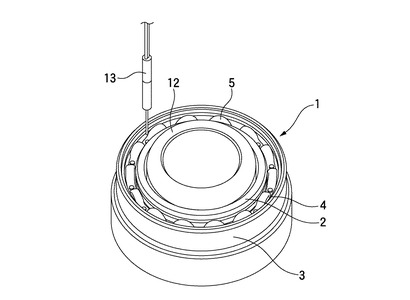
センサ13は、変位センサ或いは光電センサであり、図2に示すように、玉軸受1の内輪2、外輪3の間、具体的には、ボール4の中心軌道位置上の所定の位置に設置される。
【0010】
そして、位相検出装置10は、玉軸受1を回転させながら、玉軸受1内に挿入された保持器5とセンサ13との距離に応じた信号を検出する。ここで、本実施形態では、玉軸受1の保持器5が鉄製であるため、ボール4の中心軌道位置が保持器5で覆われていることから、センサ13は、保持器5との距離を検出する。なお、センサ13は、保持器5との距離を検出する代わりに、可能であれば、軸受1内に挿入されたボール4との距離を検出しても良い。
【0011】
ここで、モータ11は、サーボモータ等の回転角度を読み取れる駆動源からなり、センサ13から出力されるアナログ出力信号は、回転角度に同期して機械の制御装置14に取り込まれる。
【0012】
そして、制御装置14内に取り込まれたデータにより、最小二乗法を用いて、検出されたアナログ出力信号から近似2次関数を求める。この2次関数の係数から、ボール4の頂点位置を判断し、ボール4の位相を検出している。
【0013】
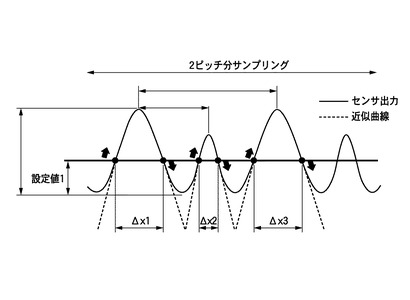
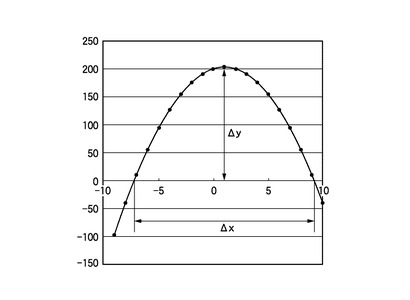
図3は、2ピッチ分をサンプリングした、センサ13から得られた信号を示している。信号には、検出したいボール4の位相情報の他に、リベット部やノイズ等の情報が含まれる。この情報から正確にボール4の位置を検出する為、センサ出力の最下点(センサからの距離が最も離れた位置)から予め設けた閾値(設定値1)を越えた部分に関して、それぞれ最小二乗法を用いて、上に凸な2次関数(y=ax2+bx+c)を求める。求めた2次関数が、ボール部分かどうかの判断は、図4に示した予め設けた閾値(y=0とする)における各Δxの値が、予め決められた範囲にあるかどうかで決定される。ここで、Δxは、

より求めることができる。図3に示したように、ボール部(Δx1)とそうでない部分(Δx2)では、幅が大きく異なることから、安定してボール部分と判断する事が可能である。
【0014】
ボール部分と判断された2次関数(y=ax2+bx+c)について、ボール部分の頂点の座標(x,y)は、
で求めることができる。これにより、ノイズに影響されずに、安定してボール4の頂点(本実施形態では、保持器5の頂点)を求めることが可能となり、ボール4の位相を確実に検出することができる。
【0015】
従って、本実施形態のボール位相検出方法によれば、センサ13を用いて、軸受1を回転させながら、軸受1内に挿入されたボール4又は保持器5とセンサ13との距離に応じた信号を検出し、制御装置14にて、検出された信号から最小二乗法を用いて2次関数を求め、ボール4の頂点位置を判断するようにしたので、ノイズに影響されずに安定してボール4の頂点位置を求めることができ、ボール4の位相を正確に且つ安価に検出することができる。
【0016】
なお、本発明は、前述した実施形態に限定されるものではなく、適宜な変形、改良等が可能である。
本発明の位相検出装置は、例えば、ボール4にグリースを塗布するグリース封入装置や、軸受1のラジアル隙間を測定する軸受検査装置に適用可能である。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態に係る位相検出装置の概略図である。
【図2】図1のセンサによる検出状態を表す要部斜視図である。
【図3】信号処理説明図である。
【図4】他の信号処理説明図である。
【図5】従来の位相検出方法を示す斜視図である。
【図6】他の従来の位相検出方法を示す斜視図である。
【符号の説明】
【0018】
1 玉軸受
2 内輪
3 外輪
4 ボール
5 保持器
10 位相検出装置
13 センサ
14 制御装置
【技術分野】
【0001】
本発明は、玉軸受のボール位相検出方法に関する。
【背景技術】
【0002】
従来、玉軸受の製造や検査等において、玉の位相を検出することが要求されており、種々の方法により行なわれている。第1の方法としては、図5に示すように、カメラ100により、軸受1の画像を取り込み、画像処理を行なう事で軸受1のボールの位置を求め、位相を検出している。第2の方法では、変位センサや光電センサを用い、光量、又は変位情報のみに閾値を設け、この値によりボールの位置を求める。第3の方法では、図6に示すように、位置決めピン200,201を使用し、このピン200,201を揺動させながら軸受1の内輪2と外輪3の間に下降させ、ボールとボールとの間にピン200,201を挿入することでボールの位相を合わせている。なお、出願人は、提示すべきこれらの方法に関する先行技術文献を見出せなかった。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、第1の方法では、装置が複雑になり、価格が高くなるという問題がある。また、第2の方法では、対象物の光沢や油付着等の要因により誤検出が多く、装置稼働率低下の原因となっていた。第3の方法では、ピン200,201がボール頂点に下降した場合には、位相を合わせることができず、また、軸受1と接触して強制的に位相を合わせるので、ゴミが発生する等の問題がある。
【0004】
本発明は、上述した課題に鑑みて為されたものであり、その目的は、安価なセンサと信号処理によって、正確にボールの位相を検出することができる玉軸受のボール位相検出方法を提供することにある。
【課題を解決するための手段】
【0005】
(1) センサが軸受の軸方向側方で対向するように前記センサ及び前記軸受を設置する工程と、
前記軸受を回転させながら、前記軸受内に挿入されたボール又は保持器と前記センサとの距離に応じた信号を検出する工程と、
前記検出された信号と前記軸受の回転角度情報とを制御装置に取り込む工程と、
前記制御装置にて、前記検出された信号から最小二乗法を用いて2次関数を求め、前記ボールの頂点位置を判断する工程と、
を備えることを特徴とする玉軸受のボール位相検出方法。
なお、「ボールの頂点位置」とは、センサとの距離が最も近いボール上の位置を意味し、保持器とセンサとの距離を検出する場合には、ボールの頂点位置は、検出された保持器とセンサとの距離が最も近い保持器の頂点位置に基づいて判断される。
【発明の効果】
【0006】
本発明の玉軸受のボール位相検出方法によれば、センサを用いて、軸受を回転させながら、軸受内に挿入されたボール又は保持器とセンサとの距離に応じた信号を検出し、制御装置にて、検出された信号から最小二乗法を用いて2次関数を求め、ボールの頂点位置を判断するようにしたので、ノイズに影響されずに安定してボールの頂点位置を求めることができ、玉の位相を正確に且つ安価に検出することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明に係る玉軸受の位相検出方法について、図面を参照して詳細に説明する。
【0008】
図1及び図2に示すように、本発明の位相検出装置10は、モータ11によって治工具12上に配置される玉軸受1を回転駆動すると共に、玉軸受1の軸方向側面に対向配置されてボール4の位相情報を検出するセンサ13を備える。また、これらモータ11及びセンサ13は、制御装置14と電気的に接続されている。
【0009】
センサ13は、変位センサ或いは光電センサであり、図2に示すように、玉軸受1の内輪2、外輪3の間、具体的には、ボール4の中心軌道位置上の所定の位置に設置される。
【0010】
そして、位相検出装置10は、玉軸受1を回転させながら、玉軸受1内に挿入された保持器5とセンサ13との距離に応じた信号を検出する。ここで、本実施形態では、玉軸受1の保持器5が鉄製であるため、ボール4の中心軌道位置が保持器5で覆われていることから、センサ13は、保持器5との距離を検出する。なお、センサ13は、保持器5との距離を検出する代わりに、可能であれば、軸受1内に挿入されたボール4との距離を検出しても良い。
【0011】
ここで、モータ11は、サーボモータ等の回転角度を読み取れる駆動源からなり、センサ13から出力されるアナログ出力信号は、回転角度に同期して機械の制御装置14に取り込まれる。
【0012】
そして、制御装置14内に取り込まれたデータにより、最小二乗法を用いて、検出されたアナログ出力信号から近似2次関数を求める。この2次関数の係数から、ボール4の頂点位置を判断し、ボール4の位相を検出している。
【0013】
図3は、2ピッチ分をサンプリングした、センサ13から得られた信号を示している。信号には、検出したいボール4の位相情報の他に、リベット部やノイズ等の情報が含まれる。この情報から正確にボール4の位置を検出する為、センサ出力の最下点(センサからの距離が最も離れた位置)から予め設けた閾値(設定値1)を越えた部分に関して、それぞれ最小二乗法を用いて、上に凸な2次関数(y=ax2+bx+c)を求める。求めた2次関数が、ボール部分かどうかの判断は、図4に示した予め設けた閾値(y=0とする)における各Δxの値が、予め決められた範囲にあるかどうかで決定される。ここで、Δxは、
より求めることができる。図3に示したように、ボール部(Δx1)とそうでない部分(Δx2)では、幅が大きく異なることから、安定してボール部分と判断する事が可能である。
【0014】
ボール部分と判断された2次関数(y=ax2+bx+c)について、ボール部分の頂点の座標(x,y)は、
で求めることができる。これにより、ノイズに影響されずに、安定してボール4の頂点(本実施形態では、保持器5の頂点)を求めることが可能となり、ボール4の位相を確実に検出することができる。
【0015】
従って、本実施形態のボール位相検出方法によれば、センサ13を用いて、軸受1を回転させながら、軸受1内に挿入されたボール4又は保持器5とセンサ13との距離に応じた信号を検出し、制御装置14にて、検出された信号から最小二乗法を用いて2次関数を求め、ボール4の頂点位置を判断するようにしたので、ノイズに影響されずに安定してボール4の頂点位置を求めることができ、ボール4の位相を正確に且つ安価に検出することができる。
【0016】
なお、本発明は、前述した実施形態に限定されるものではなく、適宜な変形、改良等が可能である。
本発明の位相検出装置は、例えば、ボール4にグリースを塗布するグリース封入装置や、軸受1のラジアル隙間を測定する軸受検査装置に適用可能である。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態に係る位相検出装置の概略図である。
【図2】図1のセンサによる検出状態を表す要部斜視図である。
【図3】信号処理説明図である。
【図4】他の信号処理説明図である。
【図5】従来の位相検出方法を示す斜視図である。
【図6】他の従来の位相検出方法を示す斜視図である。
【符号の説明】
【0018】
1 玉軸受
2 内輪
3 外輪
4 ボール
5 保持器
10 位相検出装置
13 センサ
14 制御装置
【特許請求の範囲】
【請求項1】
センサが軸受の軸方向側方で対向するように前記センサ及び前記軸受を設置する工程と、
前記軸受を回転させながら、前記軸受内に挿入されたボール又は保持器と前記センサとの距離に応じた信号を検出する工程と、
前記検出された信号と前記軸受の回転角度情報とを制御装置に取り込む工程と、
前記制御装置にて、前記検出された信号から最小二乗法を用いて2次関数を求め、前記ボールの頂点位置を判断する工程と、
を備えることを特徴とする玉軸受のボール位相検出方法。
【請求項1】
センサが軸受の軸方向側方で対向するように前記センサ及び前記軸受を設置する工程と、
前記軸受を回転させながら、前記軸受内に挿入されたボール又は保持器と前記センサとの距離に応じた信号を検出する工程と、
前記検出された信号と前記軸受の回転角度情報とを制御装置に取り込む工程と、
前記制御装置にて、前記検出された信号から最小二乗法を用いて2次関数を求め、前記ボールの頂点位置を判断する工程と、
を備えることを特徴とする玉軸受のボール位相検出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−261797(P2008−261797A)
【公開日】平成20年10月30日(2008.10.30)
【国際特許分類】
【出願番号】特願2007−106189(P2007−106189)
【出願日】平成19年4月13日(2007.4.13)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成20年10月30日(2008.10.30)
【国際特許分類】
【出願日】平成19年4月13日(2007.4.13)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]