
現在位置算出装置および現在位置算出方法
【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は現在位置算出装置および現在位置算出方法に関し、特に、移動体の真の現在位置を算出できる現在位置算出装置および現在位置算出方法に関するものである。
【背景技術】
【0002】
現在位置算出装置は、従来から様々な方法で移動体の現在位置を算出してきた。例えば、GPSによる位置情報を利用して、車両の現在位置を算出するカーナビゲーション装置が多く利用されている。
【0003】
一方、GPS等による位置情報の取得が困難な状況下では、移動体である車両に備えられた車速パルス、角速度センサー(ジャイロセンサー)を用いて現在位置の算出およびその補正を行っていた。
【0004】
しかし、このような車速パルス、角速度センサーを用いた補正では、現在位置算出の際に生じる誤差が累積してしまうという問題があった。また、角速度センサーの精度以下の動作が検知できず、角度誤差も累積するという問題もあった。
【0005】
そこで、特許文献1には、ランドマーク(電柱、信号機、道路標識等)がある地図データリストにより、車両の現在位置を特定する方法が示されている。
【0006】
具体的には、自車から確認可能な最も遠方にあるランドマークと自車の現在位置との距離を、例えば左右両眼の役目を果たす一対のTVカメラの、ステレオ画像を用いた3次元測定により求める。そして、そのランドマークに対応する地図上のランドマーク座標から車両の現在位置を特定する。
【0007】
ランドマークとランドマーク座標との対応を求める際には、自車のステレオ画像によりランドマーク種類とランドマーク間の相互距離とを観測地図リストとして作成し、地図データリストと作成した観測地図リストとのリストマッチングを行い、その対応を求める。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平8−247775号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1に示した方法では、走行路にあるランドマーク(電柱、信号機、道路標識等)が有る特定の地点でしか目標物が設定できず、目標物になりそうなものが無い単調な道路が続く場合などにランドマークが定まらないという問題があった。
【0010】
本発明は、上記のような問題を解決するためになされたものであり、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【課題を解決するための手段】
【0011】
本発明にかかる現在位置算出装置は、移動体の現在位置における2次元画像である観測画像が入力される観測画像入力部と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部と、前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する照合部と、前記照合部における照合結果に基づいて、前記移動体の真の現在位置を算出する現在位置算出部とを備えることを特徴とする。
【0012】
本発明にかかる現在位置算出方法は、(a)移動体の現在位置における2次元画像である観測画像を入力する工程と、(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、(c)前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する工程と、(d)前記工程(c)における照合結果に基づいて、前記移動体の真の現在位置を算出する工程とを備えることを特徴とする。
【発明の効果】
【0013】
本発明にかかる現在位置算出装置によれば、移動体の現在位置における2次元画像である観測画像が入力される観測画像入力部と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部と、前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する照合部と、前記照合部における照合結果に基づいて、前記移動体の真の現在位置を算出する現在位置算出部とを備えることにより、現在位置における2次元画像を用いることで誤差の累積を抑制し、画像マッチングによって移動体の真の現在位置を算出することができる。
【0014】
本発明にかかる現在位置算出方法によれば、(a)移動体の現在位置における2次元画像である観測画像を入力する工程と、(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、(c)前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する工程と、(d)前記工程(c)における照合結果に基づいて、前記移動体の真の現在位置を算出する工程とを備えることにより、現在位置における2次元画像を用いることで誤差の累積を抑制し、画像マッチングによって移動体の真の現在位置を算出することができる。
【図面の簡単な説明】
【0015】
【図1】実施の形態1にかかる現在位置算出装置の構成を示す図である。
【図2】実施の形態1にかかる観測画像の例を示す図である。
【図3】実施の形態1にかかるピクセルパターンの例を示す図である。
【図4】実施の形態1にかかる地図データの例を示す図である。
【図5】実施の形態1にかかる地図データの通信例を示す図である。
【図6】実施の形態1にかかるピクセルパターンの例を示す図である。
【図7】実施の形態1にかかる補正部および現在位置算出部の構成を示す図である。
【図8】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図9】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図10】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図11】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図12】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図13】実施の形態1にかかる現在位置算出装置の動作を示す図である。
【図14】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【図15】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【図16】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【図17】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【発明を実施するための形態】
【0016】
<A.実施の形態1>
<A−1.構成>
図1は、本発明にかかる現在位置算出装置の全体構成を、概念的に示したものである。なお、以下の説明では、特に「車両」の現在位置を算出する場合について説明するが、本発明は、車両の位置を算出する場合に限られるものではなく、一般に移動体の現在位置を算出することができる現在位置算出装置である。
【0017】
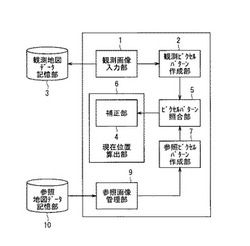
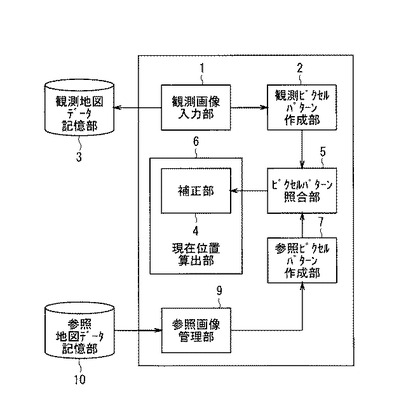
図1に示すように、現在位置算出装置は、移動体としての車両の現在位置において車両側から車両の周囲の全方向を連続的に撮像した2次元画像(観測画像)が入力される観測画像入力部1と、観測画像入力部1における観測画像から、観測ピクセルパターンを作成する観測ピクセルパターン作成部2とを備えている。また、観測画像入力部1における観測画像に所定の属性データを付加させ、平面地図データ上に観測地図データとしてリンクさせて記憶する観測地図データ記憶部3をさらに備えることができるが、当該構成は、ネットワーク等を介して利用することもできる。
【0018】
また、例えばネットワーク上において、予め平面地図データ上の所定の地点にリンクされた、その位置における車両側から撮像した2次元画像(参照画像)を含む参照地図データを記憶する参照地図データ記憶部10と、参照地図データ記憶部10から所定の参照地図データを取得し、その参照画像を管理する参照画像管理部9と、参照画像管理部9における参照画像から、参照ピクセルパターンを作成する参照ピクセルパターン作成部7と、観測ピクセルパターンと参照ピクセルパターンとを画像マッチングにより照合するピクセルパターン照合部5と、GPS等による位置情報やピクセルパターン照合部5における照合結果に基づいて、車両の真の現在位置を算出する現在位置算出部6と、現在位置算出部6において、照合結果から算出される値の補正を行う補正部4とを備える。
【0019】
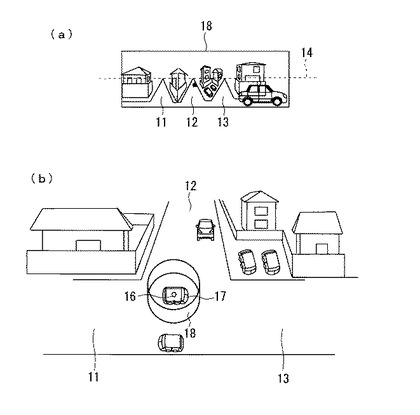
観測画像入力部1は、観測画像として、例えば車両等に取り付けられた全方向カメラ16によって撮像された、図2(a)および(b)に示すようなパノラマ画像18(アラウンドビュー)を取得することができる。図2(b)に示すような自車17位置から、全方向カメラ16を用いて観測した場合、図2(a)に示すようなパノラマ画像18を取得することができる(図2(a)に示すパノラマ画像18は、図2(b)に示すパノラマ画像18を平面状に広げたものである)。水平線14が画像の中央付近にあり、道路11、道路12、道路13のそれぞれが、順に示されている。
【0020】
なお、入力される観測画像はパノラマ画像である必要はなく、所定範囲の建造物等を車両側から観測したものであればよい。
【0021】
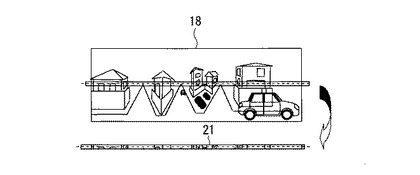
観測ピクセルパターン作成部2は、図3に示すように、観測画像(パノラマ画像18)から当該観測画像の一部、例えば所定の高さ分の水平方向のピクセルパターンを切り取り、観測ピクセルパターン21を作成する。切り取る部分の高さは、最も位置特定に有利な高さ位置、例えば外乱の少ない水平線高さ位置(通りの自動車、人、通りに面した塀等に関係しない高さ)を中心とすることが望ましい。
【0022】
観測地図データ記憶部3および参照地図データ記憶部10は、例えば図4(a)に示すように、平面地図データ103上にリンクさせて地図データ102(観測地図データまたは参照地図データ)を記憶している。
【0023】
参照地図データ記憶部10では、リンクに際して、参照画像(図4(b)に例示するパノラマ画像111)に属性データ(例えば、緯度および経度、画像地図名、データ基点角θ(データ取り込み初期角)、画像傾き角、水平線上下比率)を付加させた参照地図データを記憶することができる。属性データと参照画像との対応関係は例えば図4(c)に示すようになり、データ基点角θ106、画像傾き角(ピッチφ107、ロールψ108)、水平線14の水平線上下比率109がそれぞれ定義される。
【0024】
観測地図データ記憶部3においても、リンクに際して、観測画像に上記の属性データを付加させた観測地図データを記憶することができ、観測地図データと参照地図データとの記憶形式は、汎用性を高めるため統一されていることが望ましい。このようにすれば、観測地図データ記憶部3に記憶された観測地図データは、参照地図データ記憶部10に記憶された参照地図データと同様に、参照画像管理部9に取得される地図データとして活用できる。
【0025】
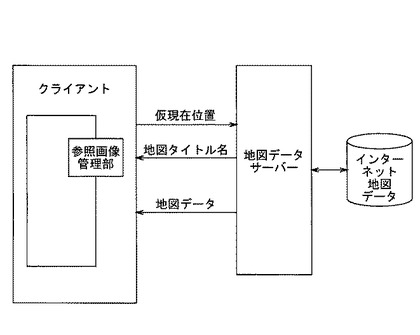
地図データの具体例としては、例えば特表2010−531007号公報に示すようなものがある。地図データを記憶する図5に示すような地図データサーバーにアクセスし、車両の仮現在位置を通知することで、対応する地図データが取得できる。仮現在位置については後述する。
【0026】
一般にデジタル地図は、国土地理院の平面地形図等をベースに作られ、フォーマットは日本工業規格(JIS−D0810)に準拠した業界標準のKiwi−Wフォーマット等で作られている。また、インターネットでは、グーグルおよびヤフー等でのデジタル地図検索が一般的となっている。よって、観測地図データまたは参照地図データを既存のグーグルストリートビュー等と同様の記憶形式とすることで、汎用性を高めることも可能である。
【0027】
参照画像管理部9は、参照地図データ記憶部10における所定の参照地図データを取得し、その参照画像を管理する。取得する参照地図データの平面地図データ上の座標位置は、車両の仮現在位置に基づいて設定される。
【0028】
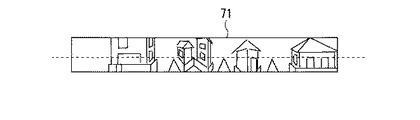
参照ピクセルパターン作成部7は、図6に示すように、参照画像から例えば所定高さ分の水平方向のピクセルパターンを切り取り、参照ピクセルパターン71を作成する。参照ピクセルパターン71は、観測ピクセルパターン21(図3参照)と対応する水平高さであることが望ましく、また対応する観測ピクセルパターン21と比較して所定高さである切り出し幅を広くしておくことが望ましい。これは、観測ピクセルパターン21と参照ピクセルパターン71とでマッチングを行う際に、観測ピクセルパターン21に生じている観測誤差を考慮するためである。なお逆に、観測ピクセルパターン21の切り出し幅を広くすることも可能である。
【0029】
<A−2.動作>
次に、本発明にかかる現在位置算出装置の動作を説明する。
【0030】
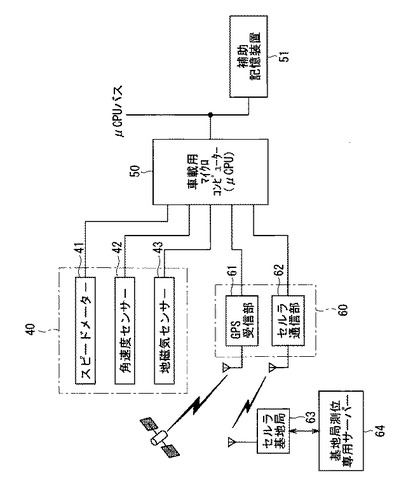
図7は、図1において概念的に示された補正部4および現在位置算出部6を具体的に示した構成図である。特に、慣性航法センサー40および車載用マイクロコンピューター50を含む構成が補正部4に対応する。
【0031】
慣性航法センサー40は、スピードメーター41(車速パルス)、角速度センサー42、地磁気センサー43を備える。位置特定センサー60は、GPS受信部61を備える。慣性航法センサー40および位置特定センサー60は、それぞれ車載用マイクロコンピューター50に接続される。
【0032】
また位置特定センサー60は、GPS受信部61において、GPSによる位置情報を受信できる。
【0033】
さらに車載用マイクロコンピューター50には、補助記憶装置51が接続されている。
【0034】
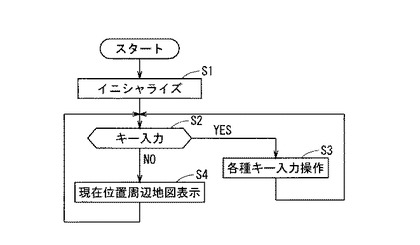
図8に示すように車載用マイクロコンピューター50は、プログラムを実行させるためのイニシャライズを行い(ステップS1)、ユーザからのキー入力があるか否かを判断する(ステップS2)。キー入力がある場合には、当該キー入力に対応した入力操作を行う(ステップS3)。キー入力がない場合には、例えば、車両の現在位置周辺の地図を表示画面に表示することができる(ステップS4)。
【0035】
本発明にかかる現在位置算出装置は、当該画面表示等の動作をしながら、車両の現在位置を算出する動作を行う。以下に現在位置算出処理の全体のフローを説明する。
【0036】
まず、位置特定センサー60のGPS受信部61において、GPSによる位置情報を取得する。取得した位置情報および慣性航法センサーの測位データに基づいて、車両の現在位置を特定する。このとき、位置特定の精度を高めるために、GPSにより複数回取得した位置情報の平均値である平均GPS測位位置を用いることも可能である。
【0037】
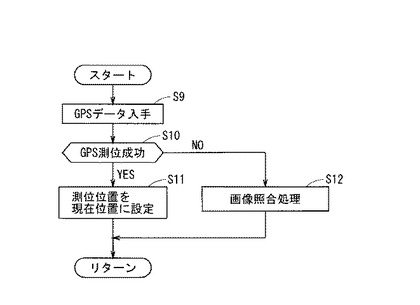
具体的には図9に示すように、まずGPSによる位置情報を取得する(ステップS9)。次に、取得した位置情報から車両の測位位置(緯度および経度)を特定し、GPS測位が成功したかを判定する。具体的には、(1)GPSにより特定した車両の測位位置と前回決定された車両の現在位置との座標差が所定の範囲内であるか否か、(2)平均GPS測位位置のσ値が規定値以上ばらついているか否か、(3)受信レベルが規定値以下か否か等に基づいて判断する(ステップS10)。ここで、前回決定された車両の現在位置とは、本動作を行う直前までに認識されていた車両の現在位置であり、現在位置算出部6に記憶されている。認識していた時間が近いほど、より正確な位置情報となる。また、この現在位置算出部6に記憶されている前回決定された車両の現在位置は、後に説明する画像照合処理において仮現在位置として用いられる。
【0038】
GPSによる測位が成功したと判定された場合にはステップS11へ、GPSによる測位が成功しなかったと判定された場合にはステップS12へそれぞれ進む。
【0039】
ステップS11においては、GPSにより特定した車両の測位位置を車両の真の現在位置として設定し、記憶する。
【0040】
ステップS12においては、画像照合処理に進む。画像照合処理については、後で詳しく説明する。
【0041】
GPS受信部61により決定した車両の現在位置を慣性航法センサー40の距離センサーとしてのスピードメーター41(車速パルス)、方位センサーとしての角速度センサー42(ジャイロセンサー)および地磁気センサー43を用いて補正し、車両の現在位置を設定する。
【0042】
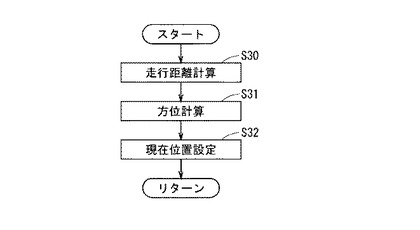
具体的には図10に示すように、スピードメーター41を用いて、走行距離の計算を行う(ステップS30)。次に、角速度センサー42および地磁気センサー43を用いて、方位の計算を行う(ステップS31)。
【0043】
次に、GPS受信部61により決定した車両の現在位置を算出した走行距離、方位を用いて補正し、車両の真の現在位置として設定し、記憶する(ステップS32)。
【0044】
次に、GPSによる位置情報の取得困難な状況下で行われる画像照合処理の動作について説明する。
【0045】
GPS衛星からの電波等の受信が困難な、高層ビルが並ぶ市街地や外国等において、以下のような動作を行う。なお、同様にGPS衛星からの電波等が受信困難なトンネル内、地下および立体駐車場、大きな建物等においても、条件が整えば以下のような動作が可能である。
【0046】
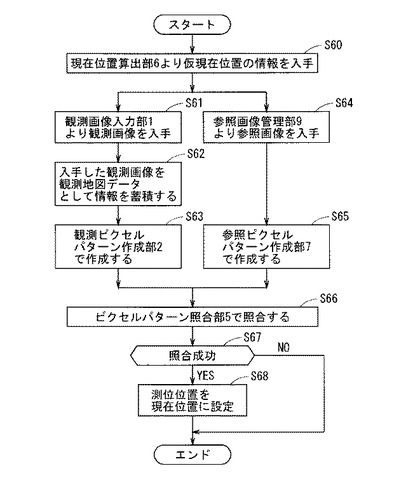
図9で示す現在位置を算出する処理フローでGPS測位に失敗し、ステップS12の画像照合処理に進んだ場合、まず、図11に示すように、例えば現在位置算出部6より、前回の現在位置算出処理で設定された現在位置である仮現在位置の情報を取得する(ステップS60)。
【0047】
次に、観測画像入力部1において、観測画像を取得し(ステップS61)、取得した観測画像に属性データを付加し、観測地図データとして観測地図データ記憶部3に記憶する(ステップS62)。観測ピクセルパターン作成部2において、取得した観測画像から、例えば水平方向の観測ピクセルパターンを作成する(ステップS63)。なお、観測画像に属性データを付加して記憶する動作は、必須の動作ではない。
【0048】
一方で参照画像管理部9では、現在位置算出部6より得た仮現在位置の情報から、参照地図データ記憶部10における、仮現在位置に対応する参照地図データを取得し、さらに当該参照地図データから参照画像を取得する(ステップS64)。そして、参照ピクセルパターン作成部7において、取得した参照画像から、例えば水平方向の参照ピクセルパターンを作成する(ステップS65)。
【0049】
次に、ピクセルパターン照合部5において、観測ピクセルパターンと参照ピクセルパターンとの照合処理を行う(ステップS66)。
【0050】
ここで、ピクセルパターンの照合処理の動作について、図12を用いて説明する。
【0051】
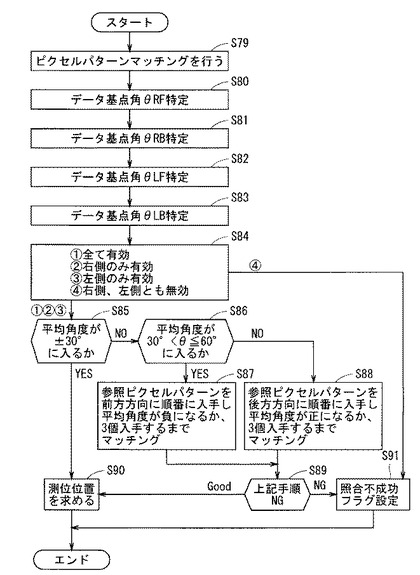
まずピクセルパターン照合部5において、観測ピクセルパターンと参照ピクセルパターンとのピクセルパターンマッチング(画像マッチング)を行う(ステップS79)。
【0052】
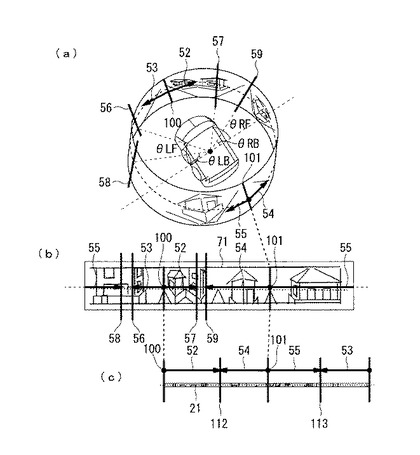
ピクセルパターンマッチングは、例えば図13に示すような方法で車両の右前方部分、右後方部分、左前方部分、左後方部分の4箇所に分けて行う。車両を囲むように配置される参照ピクセルパターン71に含まれる方位情報および車両の進行方向に基づいて、車両進行方向の前後に前方マッチング開始点100および後方マッチング開始点101を設定する(図13(a)参照)。
【0053】
観測ピクセルパターン21(図13(c)参照)においても、参照ピクセルパターン71(図13(b)参照)と対応させて、車両進行方向の前方および後方に、前方マッチング開始点100および後方マッチング開始点101を設定する。
【0054】
例えば右前方マッチング推移52でマッチングを行う場合は、観測ピクセルパターン21の前方マッチング開始点100と、参照ピクセルパターン71の前方マッチング開始点100とを基点として、ともに右前方マッチング推移52の方向(周方向の時計回り)にピクセルパターンマッチングで行い、観測ピクセルパターン21の右マッチング最終位置112(前方マッチング開始点100から時計回りに90°の位置)まで到達させる。このとき、参照ピクセルパターン71において観測ピクセルパターン21とマッチングされた位置を右前方マッチング最終位置57とする。
【0055】
同様にして後方マッチング開始点101を基点として右後方マッチング推移54の方向(周方向の反時計回り)で右後方マッチング最終位置59を求め、さらに、左前方マッチング推移53の方向、左後方マッチング推移55の方向のそれぞれにおいても、観測ピクセルパターン21の左マッチング最終位置113(前方マッチング開始点100から反時計回りに90°の位置)まで到達させ、観測ピクセルパターン21とマッチングされた位置を左前方マッチング最終位置56および左後方マッチング最終位置58として求める。
【0056】
なお、本実施の形態では、観測ピクセルパターン21のマッチング最終位置を固定してマッチングを行ったが、参照ピクセルパターン71のマッチング最終位置を固定してマッチングを行ってもよい。
【0057】
また、本実施の形態では、観測画像および参照画像双方のピクセルパターンを切り出し、マッチングをしたが、観測画像および参照画像の双方、または一方がピクセルパターンを切り出したものでなく、画像全体としてマッチングを行うことも可能である。
【0058】
当該方法は、ピクセル間の単調連続性を保持しつつ、画素毎に対応関係を求めることが可能となるため、比較する参照ピクセルパターン71および観測ピクセルパターン21の車両の位置が多少ずれ、画像が異なっていても、安定性の高いマッチングを行うことができるため望ましい。
【0059】
平面地図データ上で、車両中心を通る、車両の進行方向に垂直な方向の線を基準線として、車両中心から、左前方マッチング最終位置56、右前方マッチング最終位置57、左後方マッチング最終位置58、右後方マッチング最終位置59のそれぞれに対して形成される角度を、それぞれデータ基点角θLF、データ基点角θRF、データ基点角θLB、データ基点角θRBとする(図13(a)参照)。
【0060】
上記のような方法で、データ基点角θ(データ基点角θRF、データ基点角θRB、データ基点角θLF、データ基点角θLB)を特定する(ステップS80〜ステップS83)。なお特定の順序は、当該フローチャートに示す場合に限られない。
【0061】
次に、データ基点角θが有効であるか否かを判定する(ステップS84)。有効か否かは、例えば各データ基点角θが±60°の範囲内であるか否かで判定する。(1)4つのデータ基点角が全て±60°の範囲内である場合(全てのデータ基点角θが有効である場合)、または、(2)車両右側のデータ基点角θ(データ基点角θRFおよびデータ基点角θRB)は±60°の範囲内である場合(車両右側のデータ基点角θRが有効である場合)、または、(3)車両左側のデータ基点角θ(データ基点角θLFおよびデータ基点角θLB)は±60°の範囲内である場合(車両左側のデータ基点角θLが有効である場合)には、ステップS85に進む。一方、それ以外の場合(車両右側のデータ基点角θR、車両左側のデータ基点角θLともに無効である場合)には、ステップS91へ進む。
【0062】
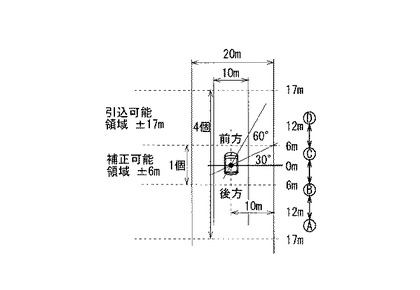
ここで、データ基点角θが±60°の範囲内である場合について図14に示す。
【0063】
まず、観測ピクセルパターンと比較する参照ピクセルパターンが、カメラの死角による欠陥を抑制するため、平面地図上に約10m間隔でリンクされているとする。
【0064】
また、観測ピクセルパターン21は例えば外乱の少ない水平線の高さ等の位置を収集しているが、水平線の高さに関わらず、画像中マッチングが可能な特徴ある立ち木、建物等が画像に写り画像マッチング可能となる。この画像マッチングが可能な道路と並行する固定物の位置の想定線を画像収集予測線とする。
【0065】
道路幅を10m、観測ピクセルパターン21の画像収集予測線間の距離を20mとすると、道路中央に位置した車両から、進行方向と垂直な方向の観測ピクセルパターン21の画像収集予測線までの距離は10mとなる。
【0066】
図14に示すように、車両からみてのデータ基点角(データ基点角θRFまたはデータ基点角θRB)が+30°となる観測ピクセルパターン21の画像収集予測線上の地点は、車両からおよそ6m前方となる。同様に、車両からみてのデータ基点角が+60°となる観測ピクセルパターン21の画像収集予測線上の地点は、車両からおよそ17m前方となる。
【0067】
車両の前後方向±6mまでの範囲(補正可能領域)においては、参照ピクセルパターンが1つ存在する(図14においてはCのみ)として、当該1つの参照ピクセルパターンを基準に、データ基点角θによる車両の進行方向の位置補正をする。
【0068】
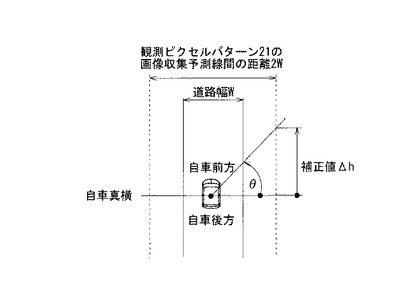
当該補正は、例えば図15に示すように、道路幅Wに対して観測ピクセルパターン21の画像収集予測線間の距離を2Wとし、データ基点角θを図のようにとると、
補正値Δh=W×tan(θ)
として計算することができる。道路幅が不明である場合には、例えばW=10(m)として計算する。当該補正を行うことで、車両の測位位置を求めることができる。
【0069】
同様に、車両の前後方向±17mまでの範囲(引込可能領域)においては、参照ピクセルパターンが4つ存在する(図14においてはA〜D)として、当該4つの参照ピクセルパターンを基準に、データ基点角θによる車両の進行方向の位置補正をする。
【0070】
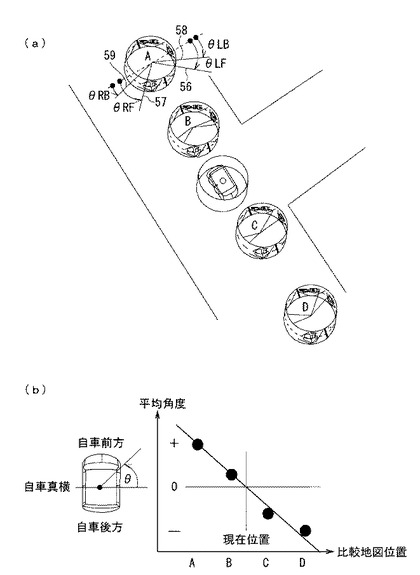
具体的には、図16に示すように位置補正を行う。図14に示したA〜Dの参照ピクセルパターン71が図16(a)のような座標位置であるとき、データ基点角θRFとデータ基点角θRBとの平均角度、または、データ基点角θLFとデータ基点角θLBとの平均角度は図16(b)に示すように変化する。
【0071】
これらの平均角度が0°となる座標位置が車両の測位位置となるので、A〜Dの各平均角度の推移から、車両の測位位置を求めることができる。
【0072】
データ基点角θが±60°の範囲外となる場合、マッチング視野端は車両の前後方向±17mを超える範囲となり、測位位置を算出するまでにさらに多くの参照ピクセルパターンとのピクセルパターンマッチングを行う必要がある。また、各ピクセルパターンマッチングにおける推移幅が短く、マッチング精度が低下してしまう。よって、データ基点角θが例えば±60°の範囲内の場合に有効としている。なお、参照ピクセルパターンの作成間隔や、マッチングの演算速度等によって、当該角度範囲は変更可能である。
【0073】
ステップS85において、前述のように、データ基点角θRFとデータ基点角θRBとの平均角度、または、データ基点角θLFとデータ基点角θLBとの平均角度が、±30°の範囲内であるか否かを判定する。平均角度が±30°の範囲内である場合には、ステップS90に進む。そして、当該平均角度に基づいて車両の進行方向の位置補正を行い、測位位置を求める(図15参照)。平均角度が±30°の範囲外である場合には、ステップS86へ進む。
【0074】
ステップS86において、平均角度が30°より大きく60°以下であるか否かを判定する。そうである場合にはステップS87へ、そうでない場合、すなわち、平均角度が−60°以上で−30°未満である場合にはステップS88へそれぞれ進む。
【0075】
ステップS87においては、車両の進行方向(前方)に順に参照ピクセルパターンを取得し、平均角度が負の値になるか、若しくは参照ピクセルパターンを3つ取得するまで、マッチング動作を繰り返す。当該動作が終了したら、ステップS89へ進む。
【0076】
ステップS88においては、車両の進行方向と逆方向(後方)に順に参照ピクセルパターンを取得し、平均角度が正の値になるか、若しくは参照ピクセルパターンを3つ取得するまで、マッチング動作を繰り返す。当該動作が終了したら、ステップS89へ進む。
【0077】
ステップS89において、上記の繰り返しマッチング動作が適切に終了したか否かを判断し、適切に終了した場合にはステップS90へ、そうでない場合にはステップS91へそれぞれ進む。
【0078】
ステップS90においては、平均角度の推移から、車両の測位位置を求める(図16(b)参照)。ステップS91においては、照合失敗フラグを設定して終了する。
【0079】
次に、現在位置算出部6において、観測ピクセルパターンと参照ピクセルパターンとの照合が成功したか否かを判断し(図11のステップS67)、照合が成功した場合にはステップS68へ、照合が失敗した場合には画像照合処理を終了して現在位置算出処理に戻る。
【0080】
ステップS68において、測位位置を真の現在位置に設定して記憶し、現在位置算出処理に戻る。
【0081】
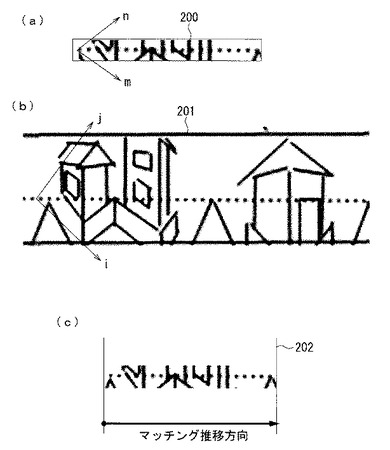
図17に、上記のピクセルパターンマッチングの例を示す。
【0082】
画素位置をm座標、n座標により特定できる観測ピクセルパターン200(図17(a)参照)と、これと類似するピクセルパターンを含む、画素位置をi座標、j座標により特定できる参照ピクセルパターン201(図17(b)参照)とを用意する。
【0083】
類似する画像パターンの画素毎の対応関係を、両者のマッチング開始点からマッチング最終位置までマッチングを推移させることにより、順にみていく(図17(c)参照)。
【0084】
両者の画像位置と画像間距離の累積値が最小となる最小累積距離を、その最小累積距離を順次積み上げる計算をする事により求め、観測ピクセルパターン200上のマッチング最終位置202に対応する参照ピクセルパターン201上のマッチング最終位置を求める。このようにして、単調連続性を保持しつつ、画素毎に対応関係を求めることができる。
【0085】
ここで、上記のピクセルパターンマッチング動作には多少の時間がかかってしまい、車両の位置を知ることができた時点では、観測画像を取得した時刻から遅れ、車両の位置は変わってしまっていることが考えられる。
【0086】
このような場合には、慣性航法センサー40の距離センサーとしてのスピードメーター41(車速パルス)、方位センサーとしての角速度センサー42および地磁気センサー43を用いて、ピクセルパターンマッチング動作中の車両の位置変化(画像マッチングによって算出された現在位置を基点とする移動距離および移動方向)を算出し、現在位置の補正を行うことができる。すなわち、ピクセルパターンマッチングによって算出された、観測画像が作成された位置(現在位置)を、現在位置算出部6から当該情報が出力される時に実際に車両が到達している位置(真の現在位置)に補正することができる。
【0087】
ここで、車両が移動していないような場合には、観測画像が作成された位置(現在位置)と実際に車両が到達している位置(真の現在位置)とは同じ位置となるため、当該補正の必要はない。
【0088】
なお、ピクセルパターンマッチングによって得られた車両の現在位置に対して、地図データマッチングによる位置の調整を行うことも可能である。
【0089】
上記のピクセルパターンマッチング動作は、GPS等による位置情報の取得可能な状況下であっても並行して行ってよい。当該動作により算出された車両の真の現在位置と、GPS等による位置情報から算出された現在位置との間に差異がある場合には、GPSにより算出された現在位置を基準として校正してもよい。ただし、当該ピクセルパターンマッチング動作により計算速度に影響が出る等の問題が生じる場合には、ピクセルパターンマッチング動作を停止しておくことも可能である。
【0090】
このようにして算出された車両の真の現在位置を基準にして、さらに目的地までの経路誘導等を展開することが可能である。
【0091】
<A−3.効果>
本発明にかかる実施の形態によれば、現在位置算出装置において、移動体としての自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備えることで、現在位置における2次元画像(観測画像)を用いて誤差の累積を抑制し、画像マッチングによって自車17の真の現在位置を算出することができる。
【0092】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、仮現在位置が、移動体としての自車17における既知の位置情報に基づいて決定されることで、直前までに認識されていた現在位置を基準にして参照画像を取得することができる。
【0093】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、観測画像および参照画像が、移動体としての自車17の周囲を表示するパノラマ画像であることで、周囲の全方向を連続的に撮像した画像で画像マッチングすることにより、自車17の真の現在位置を算出することができる。
【0094】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、照合部としてのピクセルパターン照合部5が、観測画像および参照画像において、移動体としての自車17の進行方向における前方および後方を基点として画像マッチングを行い、当該画像マッチングの終わり位置(マッチング最終位置)に基づいて、照合結果を生成することで、各マッチング最終位置に基づくデータ基点角の大きさによって、データの有効無効の判断、および、さらなる画像マッチングの有無の判断ができ、自車17の真の現在位置を算出することができる。
【0095】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、照合部としてのピクセルパターン照合部5は、観測画像と、仮現在位置から所定範囲内に対応する複数の参照画像とを、画像マッチングにより照合し、現在位置算出部6が、ピクセルパターン照合部5における複数の参照画像を用いた照合結果に基づいて、移動体としての自車17の真の現在位置を算出することで、自車17の現在位置が仮現在位置から所定以上に離れているような場合であっても、仮現在位置周辺に関連づけられた参照画像を用いる等により自車17の真の現在位置を算出することができる。
【0096】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、観測画像および参照画像のうち少なくとも一方が、画像から画像の一部であるピクセルパターンを抽出して照合に用いられることで、画像マッチングを容易にすることができる。
【0097】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、ピクセルパターンが、画像における水平線高さを中心に所定の高さで有することで、外乱の少ない画像を比較に用いることができる。
【0098】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、移動体としての自車17の現在位置に関するデータである属性データを付加して観測画像を記憶する、観測地図データ記憶部3をさらに備えることで、観測地図データを観測地図データ記憶部3に記憶し、参照地図データと合わせて、画像マッチングのために画像を参照することができる。
【0099】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、現在位置算出部6が、照合結果に基づいて算出された移動体としての自車17の現在位置を自車17の移動距離および移動方向に基づいて補正し、真の現在位置を算出する補正部4をさらに備えることで、画像マッチングによって算出された現在位置と、実際に車両が到達している現在位置とが異なっているような場合であっても、自車17の移動距離および移動方向から、真の現在位置を適切に算出することができる。
【0100】
また、本発明にかかる実施の形態によれば、現在位置算出方法において、(a)移動体としての自車17の現在位置における2次元画像である観測画像を入力する工程と、(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、(c)観測画像と、仮現在位置に対応する参照画像とを、画像マッチングにより照合する工程と、(d)工程(c)における照合結果に基づいて、自車17の真の現在位置を算出する工程とを備えることで、現在位置における2次元画像を用いることで誤差の累積を抑制し、画像マッチングによって自車17の真の現在位置を算出することができる。
【0101】
なお本発明は、その発明の範囲内において、本実施の形態における任意の構成要素の変形もしくは省略が可能である。
【符号の説明】
【0102】
1 観測画像入力部、2 観測ピクセルパターン作成部、3 観測地図データ記憶部、4 補正部、5 ピクセルパターン照合部、6 現在位置算出部、7 参照ピクセルパターン作成部、9 参照画像管理部、10 参照地図データ記憶部、11〜13 道路、14 水平線、16 全方向カメラ、17 自車、18,111 パノラマ画像、21,200 観測ピクセルパターン、40 慣性航法センサー、41 スピードメーター、42 角速度センサー、43 地磁気センサー、50 車載用マイクロコンピューター、51 補助記憶装置、52 右前方マッチング推移、53 左前方マッチング推移、54 右後方マッチング推移、55 左後方マッチング推移、56 左前方マッチング最終位置、57 右前方マッチング最終位置、58 左後方マッチング最終位置、59 右後方マッチング最終位置、60 位置特定センサー、61 GPS受信部、62 セルラ通信部、63 セルラ基地局、64 基地局測位専用サーバー、71,201 参照ピクセルパターン、100 前方マッチング開始点、101 後方マッチング開始点、102 地図データ、103 平面地図データ、106 データ基点角θ、107 ピッチφ、108 ロールψ、109 水平線上下比率、112 右マッチング最終位置、113 左マッチング最終位置、202 最終マッチング位置。
【技術分野】
【0001】
本発明は現在位置算出装置および現在位置算出方法に関し、特に、移動体の真の現在位置を算出できる現在位置算出装置および現在位置算出方法に関するものである。
【背景技術】
【0002】
現在位置算出装置は、従来から様々な方法で移動体の現在位置を算出してきた。例えば、GPSによる位置情報を利用して、車両の現在位置を算出するカーナビゲーション装置が多く利用されている。
【0003】
一方、GPS等による位置情報の取得が困難な状況下では、移動体である車両に備えられた車速パルス、角速度センサー(ジャイロセンサー)を用いて現在位置の算出およびその補正を行っていた。
【0004】
しかし、このような車速パルス、角速度センサーを用いた補正では、現在位置算出の際に生じる誤差が累積してしまうという問題があった。また、角速度センサーの精度以下の動作が検知できず、角度誤差も累積するという問題もあった。
【0005】
そこで、特許文献1には、ランドマーク(電柱、信号機、道路標識等)がある地図データリストにより、車両の現在位置を特定する方法が示されている。
【0006】
具体的には、自車から確認可能な最も遠方にあるランドマークと自車の現在位置との距離を、例えば左右両眼の役目を果たす一対のTVカメラの、ステレオ画像を用いた3次元測定により求める。そして、そのランドマークに対応する地図上のランドマーク座標から車両の現在位置を特定する。
【0007】
ランドマークとランドマーク座標との対応を求める際には、自車のステレオ画像によりランドマーク種類とランドマーク間の相互距離とを観測地図リストとして作成し、地図データリストと作成した観測地図リストとのリストマッチングを行い、その対応を求める。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平8−247775号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1に示した方法では、走行路にあるランドマーク(電柱、信号機、道路標識等)が有る特定の地点でしか目標物が設定できず、目標物になりそうなものが無い単調な道路が続く場合などにランドマークが定まらないという問題があった。
【0010】
本発明は、上記のような問題を解決するためになされたものであり、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【課題を解決するための手段】
【0011】
本発明にかかる現在位置算出装置は、移動体の現在位置における2次元画像である観測画像が入力される観測画像入力部と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部と、前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する照合部と、前記照合部における照合結果に基づいて、前記移動体の真の現在位置を算出する現在位置算出部とを備えることを特徴とする。
【0012】
本発明にかかる現在位置算出方法は、(a)移動体の現在位置における2次元画像である観測画像を入力する工程と、(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、(c)前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する工程と、(d)前記工程(c)における照合結果に基づいて、前記移動体の真の現在位置を算出する工程とを備えることを特徴とする。
【発明の効果】
【0013】
本発明にかかる現在位置算出装置によれば、移動体の現在位置における2次元画像である観測画像が入力される観測画像入力部と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部と、前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する照合部と、前記照合部における照合結果に基づいて、前記移動体の真の現在位置を算出する現在位置算出部とを備えることにより、現在位置における2次元画像を用いることで誤差の累積を抑制し、画像マッチングによって移動体の真の現在位置を算出することができる。
【0014】
本発明にかかる現在位置算出方法によれば、(a)移動体の現在位置における2次元画像である観測画像を入力する工程と、(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、(c)前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する工程と、(d)前記工程(c)における照合結果に基づいて、前記移動体の真の現在位置を算出する工程とを備えることにより、現在位置における2次元画像を用いることで誤差の累積を抑制し、画像マッチングによって移動体の真の現在位置を算出することができる。
【図面の簡単な説明】
【0015】
【図1】実施の形態1にかかる現在位置算出装置の構成を示す図である。
【図2】実施の形態1にかかる観測画像の例を示す図である。
【図3】実施の形態1にかかるピクセルパターンの例を示す図である。
【図4】実施の形態1にかかる地図データの例を示す図である。
【図5】実施の形態1にかかる地図データの通信例を示す図である。
【図6】実施の形態1にかかるピクセルパターンの例を示す図である。
【図7】実施の形態1にかかる補正部および現在位置算出部の構成を示す図である。
【図8】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図9】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図10】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図11】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図12】実施の形態1にかかる、現在位置算出装置の動作を示すフローチャートである。
【図13】実施の形態1にかかる現在位置算出装置の動作を示す図である。
【図14】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【図15】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【図16】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【図17】実施の形態1にかかる現在位置算出装置の動作を説明する図である。
【発明を実施するための形態】
【0016】
<A.実施の形態1>
<A−1.構成>
図1は、本発明にかかる現在位置算出装置の全体構成を、概念的に示したものである。なお、以下の説明では、特に「車両」の現在位置を算出する場合について説明するが、本発明は、車両の位置を算出する場合に限られるものではなく、一般に移動体の現在位置を算出することができる現在位置算出装置である。
【0017】
図1に示すように、現在位置算出装置は、移動体としての車両の現在位置において車両側から車両の周囲の全方向を連続的に撮像した2次元画像(観測画像)が入力される観測画像入力部1と、観測画像入力部1における観測画像から、観測ピクセルパターンを作成する観測ピクセルパターン作成部2とを備えている。また、観測画像入力部1における観測画像に所定の属性データを付加させ、平面地図データ上に観測地図データとしてリンクさせて記憶する観測地図データ記憶部3をさらに備えることができるが、当該構成は、ネットワーク等を介して利用することもできる。
【0018】
また、例えばネットワーク上において、予め平面地図データ上の所定の地点にリンクされた、その位置における車両側から撮像した2次元画像(参照画像)を含む参照地図データを記憶する参照地図データ記憶部10と、参照地図データ記憶部10から所定の参照地図データを取得し、その参照画像を管理する参照画像管理部9と、参照画像管理部9における参照画像から、参照ピクセルパターンを作成する参照ピクセルパターン作成部7と、観測ピクセルパターンと参照ピクセルパターンとを画像マッチングにより照合するピクセルパターン照合部5と、GPS等による位置情報やピクセルパターン照合部5における照合結果に基づいて、車両の真の現在位置を算出する現在位置算出部6と、現在位置算出部6において、照合結果から算出される値の補正を行う補正部4とを備える。
【0019】
観測画像入力部1は、観測画像として、例えば車両等に取り付けられた全方向カメラ16によって撮像された、図2(a)および(b)に示すようなパノラマ画像18(アラウンドビュー)を取得することができる。図2(b)に示すような自車17位置から、全方向カメラ16を用いて観測した場合、図2(a)に示すようなパノラマ画像18を取得することができる(図2(a)に示すパノラマ画像18は、図2(b)に示すパノラマ画像18を平面状に広げたものである)。水平線14が画像の中央付近にあり、道路11、道路12、道路13のそれぞれが、順に示されている。
【0020】
なお、入力される観測画像はパノラマ画像である必要はなく、所定範囲の建造物等を車両側から観測したものであればよい。
【0021】
観測ピクセルパターン作成部2は、図3に示すように、観測画像(パノラマ画像18)から当該観測画像の一部、例えば所定の高さ分の水平方向のピクセルパターンを切り取り、観測ピクセルパターン21を作成する。切り取る部分の高さは、最も位置特定に有利な高さ位置、例えば外乱の少ない水平線高さ位置(通りの自動車、人、通りに面した塀等に関係しない高さ)を中心とすることが望ましい。
【0022】
観測地図データ記憶部3および参照地図データ記憶部10は、例えば図4(a)に示すように、平面地図データ103上にリンクさせて地図データ102(観測地図データまたは参照地図データ)を記憶している。
【0023】
参照地図データ記憶部10では、リンクに際して、参照画像(図4(b)に例示するパノラマ画像111)に属性データ(例えば、緯度および経度、画像地図名、データ基点角θ(データ取り込み初期角)、画像傾き角、水平線上下比率)を付加させた参照地図データを記憶することができる。属性データと参照画像との対応関係は例えば図4(c)に示すようになり、データ基点角θ106、画像傾き角(ピッチφ107、ロールψ108)、水平線14の水平線上下比率109がそれぞれ定義される。
【0024】
観測地図データ記憶部3においても、リンクに際して、観測画像に上記の属性データを付加させた観測地図データを記憶することができ、観測地図データと参照地図データとの記憶形式は、汎用性を高めるため統一されていることが望ましい。このようにすれば、観測地図データ記憶部3に記憶された観測地図データは、参照地図データ記憶部10に記憶された参照地図データと同様に、参照画像管理部9に取得される地図データとして活用できる。
【0025】
地図データの具体例としては、例えば特表2010−531007号公報に示すようなものがある。地図データを記憶する図5に示すような地図データサーバーにアクセスし、車両の仮現在位置を通知することで、対応する地図データが取得できる。仮現在位置については後述する。
【0026】
一般にデジタル地図は、国土地理院の平面地形図等をベースに作られ、フォーマットは日本工業規格(JIS−D0810)に準拠した業界標準のKiwi−Wフォーマット等で作られている。また、インターネットでは、グーグルおよびヤフー等でのデジタル地図検索が一般的となっている。よって、観測地図データまたは参照地図データを既存のグーグルストリートビュー等と同様の記憶形式とすることで、汎用性を高めることも可能である。
【0027】
参照画像管理部9は、参照地図データ記憶部10における所定の参照地図データを取得し、その参照画像を管理する。取得する参照地図データの平面地図データ上の座標位置は、車両の仮現在位置に基づいて設定される。
【0028】
参照ピクセルパターン作成部7は、図6に示すように、参照画像から例えば所定高さ分の水平方向のピクセルパターンを切り取り、参照ピクセルパターン71を作成する。参照ピクセルパターン71は、観測ピクセルパターン21(図3参照)と対応する水平高さであることが望ましく、また対応する観測ピクセルパターン21と比較して所定高さである切り出し幅を広くしておくことが望ましい。これは、観測ピクセルパターン21と参照ピクセルパターン71とでマッチングを行う際に、観測ピクセルパターン21に生じている観測誤差を考慮するためである。なお逆に、観測ピクセルパターン21の切り出し幅を広くすることも可能である。
【0029】
<A−2.動作>
次に、本発明にかかる現在位置算出装置の動作を説明する。
【0030】
図7は、図1において概念的に示された補正部4および現在位置算出部6を具体的に示した構成図である。特に、慣性航法センサー40および車載用マイクロコンピューター50を含む構成が補正部4に対応する。
【0031】
慣性航法センサー40は、スピードメーター41(車速パルス)、角速度センサー42、地磁気センサー43を備える。位置特定センサー60は、GPS受信部61を備える。慣性航法センサー40および位置特定センサー60は、それぞれ車載用マイクロコンピューター50に接続される。
【0032】
また位置特定センサー60は、GPS受信部61において、GPSによる位置情報を受信できる。
【0033】
さらに車載用マイクロコンピューター50には、補助記憶装置51が接続されている。
【0034】
図8に示すように車載用マイクロコンピューター50は、プログラムを実行させるためのイニシャライズを行い(ステップS1)、ユーザからのキー入力があるか否かを判断する(ステップS2)。キー入力がある場合には、当該キー入力に対応した入力操作を行う(ステップS3)。キー入力がない場合には、例えば、車両の現在位置周辺の地図を表示画面に表示することができる(ステップS4)。
【0035】
本発明にかかる現在位置算出装置は、当該画面表示等の動作をしながら、車両の現在位置を算出する動作を行う。以下に現在位置算出処理の全体のフローを説明する。
【0036】
まず、位置特定センサー60のGPS受信部61において、GPSによる位置情報を取得する。取得した位置情報および慣性航法センサーの測位データに基づいて、車両の現在位置を特定する。このとき、位置特定の精度を高めるために、GPSにより複数回取得した位置情報の平均値である平均GPS測位位置を用いることも可能である。
【0037】
具体的には図9に示すように、まずGPSによる位置情報を取得する(ステップS9)。次に、取得した位置情報から車両の測位位置(緯度および経度)を特定し、GPS測位が成功したかを判定する。具体的には、(1)GPSにより特定した車両の測位位置と前回決定された車両の現在位置との座標差が所定の範囲内であるか否か、(2)平均GPS測位位置のσ値が規定値以上ばらついているか否か、(3)受信レベルが規定値以下か否か等に基づいて判断する(ステップS10)。ここで、前回決定された車両の現在位置とは、本動作を行う直前までに認識されていた車両の現在位置であり、現在位置算出部6に記憶されている。認識していた時間が近いほど、より正確な位置情報となる。また、この現在位置算出部6に記憶されている前回決定された車両の現在位置は、後に説明する画像照合処理において仮現在位置として用いられる。
【0038】
GPSによる測位が成功したと判定された場合にはステップS11へ、GPSによる測位が成功しなかったと判定された場合にはステップS12へそれぞれ進む。
【0039】
ステップS11においては、GPSにより特定した車両の測位位置を車両の真の現在位置として設定し、記憶する。
【0040】
ステップS12においては、画像照合処理に進む。画像照合処理については、後で詳しく説明する。
【0041】
GPS受信部61により決定した車両の現在位置を慣性航法センサー40の距離センサーとしてのスピードメーター41(車速パルス)、方位センサーとしての角速度センサー42(ジャイロセンサー)および地磁気センサー43を用いて補正し、車両の現在位置を設定する。
【0042】
具体的には図10に示すように、スピードメーター41を用いて、走行距離の計算を行う(ステップS30)。次に、角速度センサー42および地磁気センサー43を用いて、方位の計算を行う(ステップS31)。
【0043】
次に、GPS受信部61により決定した車両の現在位置を算出した走行距離、方位を用いて補正し、車両の真の現在位置として設定し、記憶する(ステップS32)。
【0044】
次に、GPSによる位置情報の取得困難な状況下で行われる画像照合処理の動作について説明する。
【0045】
GPS衛星からの電波等の受信が困難な、高層ビルが並ぶ市街地や外国等において、以下のような動作を行う。なお、同様にGPS衛星からの電波等が受信困難なトンネル内、地下および立体駐車場、大きな建物等においても、条件が整えば以下のような動作が可能である。
【0046】
図9で示す現在位置を算出する処理フローでGPS測位に失敗し、ステップS12の画像照合処理に進んだ場合、まず、図11に示すように、例えば現在位置算出部6より、前回の現在位置算出処理で設定された現在位置である仮現在位置の情報を取得する(ステップS60)。
【0047】
次に、観測画像入力部1において、観測画像を取得し(ステップS61)、取得した観測画像に属性データを付加し、観測地図データとして観測地図データ記憶部3に記憶する(ステップS62)。観測ピクセルパターン作成部2において、取得した観測画像から、例えば水平方向の観測ピクセルパターンを作成する(ステップS63)。なお、観測画像に属性データを付加して記憶する動作は、必須の動作ではない。
【0048】
一方で参照画像管理部9では、現在位置算出部6より得た仮現在位置の情報から、参照地図データ記憶部10における、仮現在位置に対応する参照地図データを取得し、さらに当該参照地図データから参照画像を取得する(ステップS64)。そして、参照ピクセルパターン作成部7において、取得した参照画像から、例えば水平方向の参照ピクセルパターンを作成する(ステップS65)。
【0049】
次に、ピクセルパターン照合部5において、観測ピクセルパターンと参照ピクセルパターンとの照合処理を行う(ステップS66)。
【0050】
ここで、ピクセルパターンの照合処理の動作について、図12を用いて説明する。
【0051】
まずピクセルパターン照合部5において、観測ピクセルパターンと参照ピクセルパターンとのピクセルパターンマッチング(画像マッチング)を行う(ステップS79)。
【0052】
ピクセルパターンマッチングは、例えば図13に示すような方法で車両の右前方部分、右後方部分、左前方部分、左後方部分の4箇所に分けて行う。車両を囲むように配置される参照ピクセルパターン71に含まれる方位情報および車両の進行方向に基づいて、車両進行方向の前後に前方マッチング開始点100および後方マッチング開始点101を設定する(図13(a)参照)。
【0053】
観測ピクセルパターン21(図13(c)参照)においても、参照ピクセルパターン71(図13(b)参照)と対応させて、車両進行方向の前方および後方に、前方マッチング開始点100および後方マッチング開始点101を設定する。
【0054】
例えば右前方マッチング推移52でマッチングを行う場合は、観測ピクセルパターン21の前方マッチング開始点100と、参照ピクセルパターン71の前方マッチング開始点100とを基点として、ともに右前方マッチング推移52の方向(周方向の時計回り)にピクセルパターンマッチングで行い、観測ピクセルパターン21の右マッチング最終位置112(前方マッチング開始点100から時計回りに90°の位置)まで到達させる。このとき、参照ピクセルパターン71において観測ピクセルパターン21とマッチングされた位置を右前方マッチング最終位置57とする。
【0055】
同様にして後方マッチング開始点101を基点として右後方マッチング推移54の方向(周方向の反時計回り)で右後方マッチング最終位置59を求め、さらに、左前方マッチング推移53の方向、左後方マッチング推移55の方向のそれぞれにおいても、観測ピクセルパターン21の左マッチング最終位置113(前方マッチング開始点100から反時計回りに90°の位置)まで到達させ、観測ピクセルパターン21とマッチングされた位置を左前方マッチング最終位置56および左後方マッチング最終位置58として求める。
【0056】
なお、本実施の形態では、観測ピクセルパターン21のマッチング最終位置を固定してマッチングを行ったが、参照ピクセルパターン71のマッチング最終位置を固定してマッチングを行ってもよい。
【0057】
また、本実施の形態では、観測画像および参照画像双方のピクセルパターンを切り出し、マッチングをしたが、観測画像および参照画像の双方、または一方がピクセルパターンを切り出したものでなく、画像全体としてマッチングを行うことも可能である。
【0058】
当該方法は、ピクセル間の単調連続性を保持しつつ、画素毎に対応関係を求めることが可能となるため、比較する参照ピクセルパターン71および観測ピクセルパターン21の車両の位置が多少ずれ、画像が異なっていても、安定性の高いマッチングを行うことができるため望ましい。
【0059】
平面地図データ上で、車両中心を通る、車両の進行方向に垂直な方向の線を基準線として、車両中心から、左前方マッチング最終位置56、右前方マッチング最終位置57、左後方マッチング最終位置58、右後方マッチング最終位置59のそれぞれに対して形成される角度を、それぞれデータ基点角θLF、データ基点角θRF、データ基点角θLB、データ基点角θRBとする(図13(a)参照)。
【0060】
上記のような方法で、データ基点角θ(データ基点角θRF、データ基点角θRB、データ基点角θLF、データ基点角θLB)を特定する(ステップS80〜ステップS83)。なお特定の順序は、当該フローチャートに示す場合に限られない。
【0061】
次に、データ基点角θが有効であるか否かを判定する(ステップS84)。有効か否かは、例えば各データ基点角θが±60°の範囲内であるか否かで判定する。(1)4つのデータ基点角が全て±60°の範囲内である場合(全てのデータ基点角θが有効である場合)、または、(2)車両右側のデータ基点角θ(データ基点角θRFおよびデータ基点角θRB)は±60°の範囲内である場合(車両右側のデータ基点角θRが有効である場合)、または、(3)車両左側のデータ基点角θ(データ基点角θLFおよびデータ基点角θLB)は±60°の範囲内である場合(車両左側のデータ基点角θLが有効である場合)には、ステップS85に進む。一方、それ以外の場合(車両右側のデータ基点角θR、車両左側のデータ基点角θLともに無効である場合)には、ステップS91へ進む。
【0062】
ここで、データ基点角θが±60°の範囲内である場合について図14に示す。
【0063】
まず、観測ピクセルパターンと比較する参照ピクセルパターンが、カメラの死角による欠陥を抑制するため、平面地図上に約10m間隔でリンクされているとする。
【0064】
また、観測ピクセルパターン21は例えば外乱の少ない水平線の高さ等の位置を収集しているが、水平線の高さに関わらず、画像中マッチングが可能な特徴ある立ち木、建物等が画像に写り画像マッチング可能となる。この画像マッチングが可能な道路と並行する固定物の位置の想定線を画像収集予測線とする。
【0065】
道路幅を10m、観測ピクセルパターン21の画像収集予測線間の距離を20mとすると、道路中央に位置した車両から、進行方向と垂直な方向の観測ピクセルパターン21の画像収集予測線までの距離は10mとなる。
【0066】
図14に示すように、車両からみてのデータ基点角(データ基点角θRFまたはデータ基点角θRB)が+30°となる観測ピクセルパターン21の画像収集予測線上の地点は、車両からおよそ6m前方となる。同様に、車両からみてのデータ基点角が+60°となる観測ピクセルパターン21の画像収集予測線上の地点は、車両からおよそ17m前方となる。
【0067】
車両の前後方向±6mまでの範囲(補正可能領域)においては、参照ピクセルパターンが1つ存在する(図14においてはCのみ)として、当該1つの参照ピクセルパターンを基準に、データ基点角θによる車両の進行方向の位置補正をする。
【0068】
当該補正は、例えば図15に示すように、道路幅Wに対して観測ピクセルパターン21の画像収集予測線間の距離を2Wとし、データ基点角θを図のようにとると、
補正値Δh=W×tan(θ)
として計算することができる。道路幅が不明である場合には、例えばW=10(m)として計算する。当該補正を行うことで、車両の測位位置を求めることができる。
【0069】
同様に、車両の前後方向±17mまでの範囲(引込可能領域)においては、参照ピクセルパターンが4つ存在する(図14においてはA〜D)として、当該4つの参照ピクセルパターンを基準に、データ基点角θによる車両の進行方向の位置補正をする。
【0070】
具体的には、図16に示すように位置補正を行う。図14に示したA〜Dの参照ピクセルパターン71が図16(a)のような座標位置であるとき、データ基点角θRFとデータ基点角θRBとの平均角度、または、データ基点角θLFとデータ基点角θLBとの平均角度は図16(b)に示すように変化する。
【0071】
これらの平均角度が0°となる座標位置が車両の測位位置となるので、A〜Dの各平均角度の推移から、車両の測位位置を求めることができる。
【0072】
データ基点角θが±60°の範囲外となる場合、マッチング視野端は車両の前後方向±17mを超える範囲となり、測位位置を算出するまでにさらに多くの参照ピクセルパターンとのピクセルパターンマッチングを行う必要がある。また、各ピクセルパターンマッチングにおける推移幅が短く、マッチング精度が低下してしまう。よって、データ基点角θが例えば±60°の範囲内の場合に有効としている。なお、参照ピクセルパターンの作成間隔や、マッチングの演算速度等によって、当該角度範囲は変更可能である。
【0073】
ステップS85において、前述のように、データ基点角θRFとデータ基点角θRBとの平均角度、または、データ基点角θLFとデータ基点角θLBとの平均角度が、±30°の範囲内であるか否かを判定する。平均角度が±30°の範囲内である場合には、ステップS90に進む。そして、当該平均角度に基づいて車両の進行方向の位置補正を行い、測位位置を求める(図15参照)。平均角度が±30°の範囲外である場合には、ステップS86へ進む。
【0074】
ステップS86において、平均角度が30°より大きく60°以下であるか否かを判定する。そうである場合にはステップS87へ、そうでない場合、すなわち、平均角度が−60°以上で−30°未満である場合にはステップS88へそれぞれ進む。
【0075】
ステップS87においては、車両の進行方向(前方)に順に参照ピクセルパターンを取得し、平均角度が負の値になるか、若しくは参照ピクセルパターンを3つ取得するまで、マッチング動作を繰り返す。当該動作が終了したら、ステップS89へ進む。
【0076】
ステップS88においては、車両の進行方向と逆方向(後方)に順に参照ピクセルパターンを取得し、平均角度が正の値になるか、若しくは参照ピクセルパターンを3つ取得するまで、マッチング動作を繰り返す。当該動作が終了したら、ステップS89へ進む。
【0077】
ステップS89において、上記の繰り返しマッチング動作が適切に終了したか否かを判断し、適切に終了した場合にはステップS90へ、そうでない場合にはステップS91へそれぞれ進む。
【0078】
ステップS90においては、平均角度の推移から、車両の測位位置を求める(図16(b)参照)。ステップS91においては、照合失敗フラグを設定して終了する。
【0079】
次に、現在位置算出部6において、観測ピクセルパターンと参照ピクセルパターンとの照合が成功したか否かを判断し(図11のステップS67)、照合が成功した場合にはステップS68へ、照合が失敗した場合には画像照合処理を終了して現在位置算出処理に戻る。
【0080】
ステップS68において、測位位置を真の現在位置に設定して記憶し、現在位置算出処理に戻る。
【0081】
図17に、上記のピクセルパターンマッチングの例を示す。
【0082】
画素位置をm座標、n座標により特定できる観測ピクセルパターン200(図17(a)参照)と、これと類似するピクセルパターンを含む、画素位置をi座標、j座標により特定できる参照ピクセルパターン201(図17(b)参照)とを用意する。
【0083】
類似する画像パターンの画素毎の対応関係を、両者のマッチング開始点からマッチング最終位置までマッチングを推移させることにより、順にみていく(図17(c)参照)。
【0084】
両者の画像位置と画像間距離の累積値が最小となる最小累積距離を、その最小累積距離を順次積み上げる計算をする事により求め、観測ピクセルパターン200上のマッチング最終位置202に対応する参照ピクセルパターン201上のマッチング最終位置を求める。このようにして、単調連続性を保持しつつ、画素毎に対応関係を求めることができる。
【0085】
ここで、上記のピクセルパターンマッチング動作には多少の時間がかかってしまい、車両の位置を知ることができた時点では、観測画像を取得した時刻から遅れ、車両の位置は変わってしまっていることが考えられる。
【0086】
このような場合には、慣性航法センサー40の距離センサーとしてのスピードメーター41(車速パルス)、方位センサーとしての角速度センサー42および地磁気センサー43を用いて、ピクセルパターンマッチング動作中の車両の位置変化(画像マッチングによって算出された現在位置を基点とする移動距離および移動方向)を算出し、現在位置の補正を行うことができる。すなわち、ピクセルパターンマッチングによって算出された、観測画像が作成された位置(現在位置)を、現在位置算出部6から当該情報が出力される時に実際に車両が到達している位置(真の現在位置)に補正することができる。
【0087】
ここで、車両が移動していないような場合には、観測画像が作成された位置(現在位置)と実際に車両が到達している位置(真の現在位置)とは同じ位置となるため、当該補正の必要はない。
【0088】
なお、ピクセルパターンマッチングによって得られた車両の現在位置に対して、地図データマッチングによる位置の調整を行うことも可能である。
【0089】
上記のピクセルパターンマッチング動作は、GPS等による位置情報の取得可能な状況下であっても並行して行ってよい。当該動作により算出された車両の真の現在位置と、GPS等による位置情報から算出された現在位置との間に差異がある場合には、GPSにより算出された現在位置を基準として校正してもよい。ただし、当該ピクセルパターンマッチング動作により計算速度に影響が出る等の問題が生じる場合には、ピクセルパターンマッチング動作を停止しておくことも可能である。
【0090】
このようにして算出された車両の真の現在位置を基準にして、さらに目的地までの経路誘導等を展開することが可能である。
【0091】
<A−3.効果>
本発明にかかる実施の形態によれば、現在位置算出装置において、移動体としての自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備えることで、現在位置における2次元画像(観測画像)を用いて誤差の累積を抑制し、画像マッチングによって自車17の真の現在位置を算出することができる。
【0092】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、仮現在位置が、移動体としての自車17における既知の位置情報に基づいて決定されることで、直前までに認識されていた現在位置を基準にして参照画像を取得することができる。
【0093】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、観測画像および参照画像が、移動体としての自車17の周囲を表示するパノラマ画像であることで、周囲の全方向を連続的に撮像した画像で画像マッチングすることにより、自車17の真の現在位置を算出することができる。
【0094】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、照合部としてのピクセルパターン照合部5が、観測画像および参照画像において、移動体としての自車17の進行方向における前方および後方を基点として画像マッチングを行い、当該画像マッチングの終わり位置(マッチング最終位置)に基づいて、照合結果を生成することで、各マッチング最終位置に基づくデータ基点角の大きさによって、データの有効無効の判断、および、さらなる画像マッチングの有無の判断ができ、自車17の真の現在位置を算出することができる。
【0095】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、照合部としてのピクセルパターン照合部5は、観測画像と、仮現在位置から所定範囲内に対応する複数の参照画像とを、画像マッチングにより照合し、現在位置算出部6が、ピクセルパターン照合部5における複数の参照画像を用いた照合結果に基づいて、移動体としての自車17の真の現在位置を算出することで、自車17の現在位置が仮現在位置から所定以上に離れているような場合であっても、仮現在位置周辺に関連づけられた参照画像を用いる等により自車17の真の現在位置を算出することができる。
【0096】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、観測画像および参照画像のうち少なくとも一方が、画像から画像の一部であるピクセルパターンを抽出して照合に用いられることで、画像マッチングを容易にすることができる。
【0097】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、ピクセルパターンが、画像における水平線高さを中心に所定の高さで有することで、外乱の少ない画像を比較に用いることができる。
【0098】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、移動体としての自車17の現在位置に関するデータである属性データを付加して観測画像を記憶する、観測地図データ記憶部3をさらに備えることで、観測地図データを観測地図データ記憶部3に記憶し、参照地図データと合わせて、画像マッチングのために画像を参照することができる。
【0099】
また、本発明にかかる実施の形態によれば、現在位置算出装置において、現在位置算出部6が、照合結果に基づいて算出された移動体としての自車17の現在位置を自車17の移動距離および移動方向に基づいて補正し、真の現在位置を算出する補正部4をさらに備えることで、画像マッチングによって算出された現在位置と、実際に車両が到達している現在位置とが異なっているような場合であっても、自車17の移動距離および移動方向から、真の現在位置を適切に算出することができる。
【0100】
また、本発明にかかる実施の形態によれば、現在位置算出方法において、(a)移動体としての自車17の現在位置における2次元画像である観測画像を入力する工程と、(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、(c)観測画像と、仮現在位置に対応する参照画像とを、画像マッチングにより照合する工程と、(d)工程(c)における照合結果に基づいて、自車17の真の現在位置を算出する工程とを備えることで、現在位置における2次元画像を用いることで誤差の累積を抑制し、画像マッチングによって自車17の真の現在位置を算出することができる。
【0101】
なお本発明は、その発明の範囲内において、本実施の形態における任意の構成要素の変形もしくは省略が可能である。
【符号の説明】
【0102】
1 観測画像入力部、2 観測ピクセルパターン作成部、3 観測地図データ記憶部、4 補正部、5 ピクセルパターン照合部、6 現在位置算出部、7 参照ピクセルパターン作成部、9 参照画像管理部、10 参照地図データ記憶部、11〜13 道路、14 水平線、16 全方向カメラ、17 自車、18,111 パノラマ画像、21,200 観測ピクセルパターン、40 慣性航法センサー、41 スピードメーター、42 角速度センサー、43 地磁気センサー、50 車載用マイクロコンピューター、51 補助記憶装置、52 右前方マッチング推移、53 左前方マッチング推移、54 右後方マッチング推移、55 左後方マッチング推移、56 左前方マッチング最終位置、57 右前方マッチング最終位置、58 左後方マッチング最終位置、59 右後方マッチング最終位置、60 位置特定センサー、61 GPS受信部、62 セルラ通信部、63 セルラ基地局、64 基地局測位専用サーバー、71,201 参照ピクセルパターン、100 前方マッチング開始点、101 後方マッチング開始点、102 地図データ、103 平面地図データ、106 データ基点角θ、107 ピッチφ、108 ロールψ、109 水平線上下比率、112 右マッチング最終位置、113 左マッチング最終位置、202 最終マッチング位置。
【特許請求の範囲】
【請求項1】
移動体の現在位置における2次元画像である観測画像が入力される観測画像入力部と、
所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部と、
前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する照合部と、
前記照合部における照合結果に基づいて、前記移動体の真の現在位置を算出する現在位置算出部とを備えることを特徴とする、
現在位置算出装置。
【請求項2】
前記観測画像および前記参照画像が、前記移動体の周囲を表示するパノラマ画像であることを特徴とする、
請求項1に記載の現在位置算出装置。
【請求項3】
前記照合部が、前記観測画像および前記参照画像において、前記移動体の進行方向における前方および後方を基点として前記画像マッチングを行い、当該画像マッチングの終わり位置に基づいて、前記照合結果を生成することを特徴とする、
請求項2に記載の現在位置算出装置。
【請求項4】
前記照合部は、前記観測画像と、前記仮現在位置から所定範囲内に対応する複数の前記参照画像とを、前記画像マッチングにより照合し、
前記現在位置算出部が、前記照合部における複数の前記参照画像を用いた前記照合結果に基づいて、前記移動体の前記真の現在位置を算出することを特徴とする、
請求項1〜3のいずれかに記載の現在位置算出装置。
【請求項5】
前記観測画像および前記参照画像のうち少なくとも一方が、画像から前記画像の一部であるピクセルパターンを抽出して前記照合に用いられることを特徴とする、
請求項1〜4のいずれかに記載の現在位置算出装置。
【請求項6】
前記ピクセルパターンが、画像における水平線高さを中心に所定の高さを有することを特徴とする、
請求項5に記載の現在位置算出装置。
【請求項7】
前記現在位置算出部が、前記照合結果に基づいて算出された前記移動体の前記現在位置を前記移動体の移動距離および移動方向に基づいて補正し、前記真の現在位置を算出する補正部をさらに備えることを特徴とする、
請求項1〜6のいずれかに記載の現在位置算出装置。
【請求項8】
(a)移動体の現在位置における2次元画像である観測画像を入力する工程と、
(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、
(c)前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する工程と、
(d)前記工程(c)における照合結果に基づいて、前記移動体の真の現在位置を算出する工程とを備えることを特徴とする、
現在位置算出方法。
【請求項9】
前記工程(a)および(b)における前記観測画像および前記参照画像が、前記移動体の周囲を表示するパノラマ画像であることを特徴とする、
請求項8に記載の現在位置算出方法。
【請求項10】
前記工程(c)が、前記観測画像および前記参照画像において、前記移動体の進行方向における前方および後方を基点として前記画像マッチングを行い、当該画像マッチングの終わり位置に基づいて、前記照合結果を生成する工程であることを特徴とする、
請求項9に記載の現在位置算出方法。
【請求項11】
前記工程(c)は、前記観測画像と、前記仮現在位置から所定範囲内に対応する複数の前記参照画像とを、前記画像マッチングにより照合する工程であり、
前記工程(d)が、前記工程(c)における複数の前記参照画像を用いた前記照合結果に基づいて、前記移動体の前記真の現在位置を算出する工程であることを特徴とする、
請求項8〜10のいずれかに記載の現在位置算出方法。
【請求項12】
前記工程(a)および(b)における前記観測画像および前記参照画像のうち少なくとも一方が、画像から前記画像の一部であるピクセルパターンを抽出して前記照合に用いられることを特徴とする、
請求項8〜11のいずれかに記載の現在位置算出方法。
【請求項13】
前記ピクセルパターンが、画像における水平線高さを中心に所定の高さを有することを特徴とする、
請求項12に記載の現在位置算出方法。
【請求項14】
前記工程(d)は、前記工程(c)における照合結果に基づいて算出された前記移動体の前記現在位置を前記移動体の移動距離および移動方向に基づいて補正し、前記真の現在位置を算出する工程であることを特徴とする、
請求項8〜13のいずれかに記載の現在位置算出方法。
【請求項1】
移動体の現在位置における2次元画像である観測画像が入力される観測画像入力部と、
所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部と、
前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する照合部と、
前記照合部における照合結果に基づいて、前記移動体の真の現在位置を算出する現在位置算出部とを備えることを特徴とする、
現在位置算出装置。
【請求項2】
前記観測画像および前記参照画像が、前記移動体の周囲を表示するパノラマ画像であることを特徴とする、
請求項1に記載の現在位置算出装置。
【請求項3】
前記照合部が、前記観測画像および前記参照画像において、前記移動体の進行方向における前方および後方を基点として前記画像マッチングを行い、当該画像マッチングの終わり位置に基づいて、前記照合結果を生成することを特徴とする、
請求項2に記載の現在位置算出装置。
【請求項4】
前記照合部は、前記観測画像と、前記仮現在位置から所定範囲内に対応する複数の前記参照画像とを、前記画像マッチングにより照合し、
前記現在位置算出部が、前記照合部における複数の前記参照画像を用いた前記照合結果に基づいて、前記移動体の前記真の現在位置を算出することを特徴とする、
請求項1〜3のいずれかに記載の現在位置算出装置。
【請求項5】
前記観測画像および前記参照画像のうち少なくとも一方が、画像から前記画像の一部であるピクセルパターンを抽出して前記照合に用いられることを特徴とする、
請求項1〜4のいずれかに記載の現在位置算出装置。
【請求項6】
前記ピクセルパターンが、画像における水平線高さを中心に所定の高さを有することを特徴とする、
請求項5に記載の現在位置算出装置。
【請求項7】
前記現在位置算出部が、前記照合結果に基づいて算出された前記移動体の前記現在位置を前記移動体の移動距離および移動方向に基づいて補正し、前記真の現在位置を算出する補正部をさらに備えることを特徴とする、
請求項1〜6のいずれかに記載の現在位置算出装置。
【請求項8】
(a)移動体の現在位置における2次元画像である観測画像を入力する工程と、
(b)所定の地点に関連した2次元画像である参照画像を用意する工程と、
(c)前記観測画像と、記憶されている現在位置である仮現在位置に対応する前記参照画像とを、画像マッチングにより照合する工程と、
(d)前記工程(c)における照合結果に基づいて、前記移動体の真の現在位置を算出する工程とを備えることを特徴とする、
現在位置算出方法。
【請求項9】
前記工程(a)および(b)における前記観測画像および前記参照画像が、前記移動体の周囲を表示するパノラマ画像であることを特徴とする、
請求項8に記載の現在位置算出方法。
【請求項10】
前記工程(c)が、前記観測画像および前記参照画像において、前記移動体の進行方向における前方および後方を基点として前記画像マッチングを行い、当該画像マッチングの終わり位置に基づいて、前記照合結果を生成する工程であることを特徴とする、
請求項9に記載の現在位置算出方法。
【請求項11】
前記工程(c)は、前記観測画像と、前記仮現在位置から所定範囲内に対応する複数の前記参照画像とを、前記画像マッチングにより照合する工程であり、
前記工程(d)が、前記工程(c)における複数の前記参照画像を用いた前記照合結果に基づいて、前記移動体の前記真の現在位置を算出する工程であることを特徴とする、
請求項8〜10のいずれかに記載の現在位置算出方法。
【請求項12】
前記工程(a)および(b)における前記観測画像および前記参照画像のうち少なくとも一方が、画像から前記画像の一部であるピクセルパターンを抽出して前記照合に用いられることを特徴とする、
請求項8〜11のいずれかに記載の現在位置算出方法。
【請求項13】
前記ピクセルパターンが、画像における水平線高さを中心に所定の高さを有することを特徴とする、
請求項12に記載の現在位置算出方法。
【請求項14】
前記工程(d)は、前記工程(c)における照合結果に基づいて算出された前記移動体の前記現在位置を前記移動体の移動距離および移動方向に基づいて補正し、前記真の現在位置を算出する工程であることを特徴とする、
請求項8〜13のいずれかに記載の現在位置算出方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−61270(P2013−61270A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−200540(P2011−200540)
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]