
現在位置算出装置及びプログラム
【課題】できるだけ計算回数を抑えながら、道路リンク上の現在位置を精度良く算出することができる現在位置算出装置を提供する。
【解決手段】絶対位置情報に基づいて現在位置候補を算出する(S120)。また、道路幅員データ等から、走行可能な道路面としての走行可能領域を算出し、走行可能領域の中央部を示す走行可能領域中央軌跡を算出する(S130)。また、車両が走行していると推定される推定走行位置を算出する(S135)。そして、走行可能領域中央軌跡と推定走行位置との間の距離に基づき走行可能領域中央軌跡に対応する道路リンク上に存在する現在位置候補の評価を行い(S145)、地図上に表示する現在位置候補を選択する(S155)。
【解決手段】絶対位置情報に基づいて現在位置候補を算出する(S120)。また、道路幅員データ等から、走行可能な道路面としての走行可能領域を算出し、走行可能領域の中央部を示す走行可能領域中央軌跡を算出する(S130)。また、車両が走行していると推定される推定走行位置を算出する(S135)。そして、走行可能領域中央軌跡と推定走行位置との間の距離に基づき走行可能領域中央軌跡に対応する道路リンク上に存在する現在位置候補の評価を行い(S145)、地図上に表示する現在位置候補を選択する(S155)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の現在位置を算出する現在位置算出装置に関する。
【背景技術】
【0002】
従来、自立航法により走行軌跡を算出し、その算出した走行軌跡と地図データとの相関を取ることにより自車位置を推測するというマップマッチング手法が知られている。例えば、特許文献1に記載された技術は、車両の走行軌跡を一定距離の線分で折線近似するとともに、道路リンクに基づく候補道路も同様に一定距離の線分で折線近似し、折線近似された走行軌跡と折線近似された候補道路とのベクトルのずれが最小となるよう走行軌跡と候補道路とを合わせる(マッチングする)ものである。しかし、マップマッチング手法で使用される道路リンクは、実在する道路面(通行方向の異なる道路も含めた道路領域)のほぼ中心を通過するように設定されていることが一般的であり、このことが原因で正確なマップマッチングができない場合があるという問題を有していた。以下にその例を、図11を用いて説明する。
【0003】
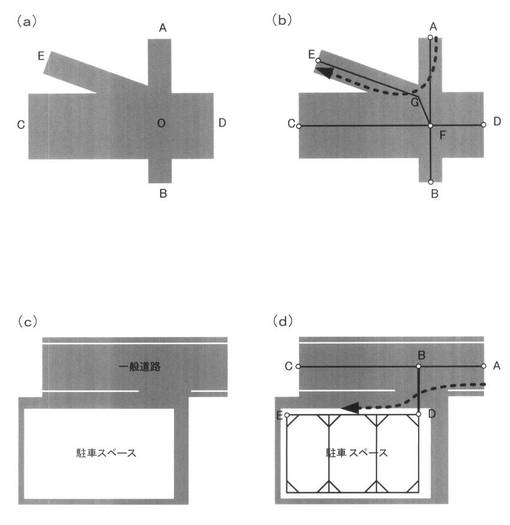
図11(a)に示す例は、交差点Oと、その交差点Oより延びる幅の広い道路OC,ODと、交差点より延びる幅の狭い道路OA,OB,OEとからなる交差点図である。このような交差点には、図11(b)に示すように、道路面のほぼ中心を通過するように道路リンク(リンクデータ)が設定される。
【0004】
このため、車両が交差点のAから進入し、Eへ退出する走行パターンの場合、対応する道路リンク列はAF→FG→GEとなるが、道路リンク列の形状が走行軌跡と合わない区間を含むため、道路リンクと走行軌跡との相関性が低下し、道路上を走行していると見なせない、又は別の道路(例えばAF→FC)の方が相関性が高いと判断されて間違った道路上に自車位置が算出されてしまうことが考えられる。
【0005】
また図11(c)に示す例は、幅の広い道路に奥行きのある駐車スペースが隣接している場合の道路図である。このような配置関係においては道路の駐車スペースとの接続部分は、図11(d)に示すように、駐車スペースの開口部分の中央を道路リンクが通るように設定される(道路リンクBD参照)。
【0006】
このため、車両が道路から駐車スペースに進入する場合に対応する道路リンク列はAB→BD→DEだが、上述した方法のマップマッチングを行うと、道路リンク列AB→BCの方がよりベクトル間のずれが小さくなるため、誤った自車位置が算出されてしまう結果となる。
【0007】
これらの問題点は、実在する道路は領域を持った面であることに対し、マッチングする候補道路を、道路リンク(道路面の中心線)によって近似したことに起因するものであり、同様の問題は具体例を用いて説明した場合に限らず様々な状況で発生する。
【0008】
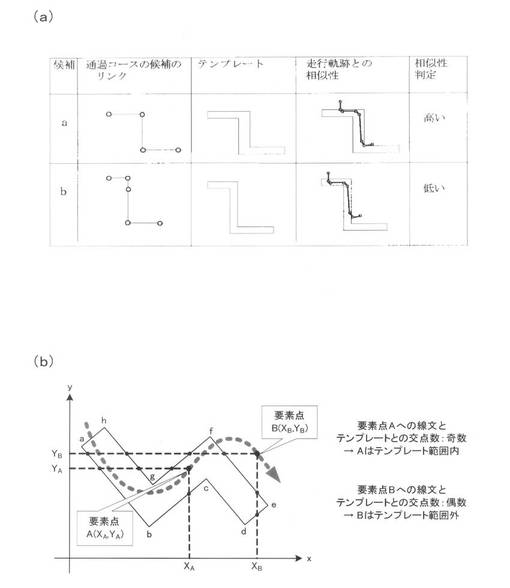
上述した問題を軽減する手法として、道路の幅員が考慮された形のテンプレートを作成し、そのテンプレート内に車両の走行軌跡が収まるように車両の走行軌跡あるいは進行方位を修正し、現在位置を同定するマップマッチング方法が知られている(特許文献2参照)。具体的には、道路の幅員を用いて2次元の多角形のテンプレートを作成し、所定区間の走行軌跡の要素点がそのテンプレート内に収まっているかどうかで走行軌跡と道路との相似性を判断する(図12(a)参照)。
【0009】
しかしながら、2次元のテンプレート内に要素点が収まっているか否かを判定するためには、テンプレートを構成する要素点数分の座標を扱うためのメモリ領域が、判定に用いるテンプレート数分必要となる。また、要素点がテンプレートに含まれているかどうかの判定は、例えばテンプレート範囲外から対象とする要素点に引いた線分とテンプレートを構成する線分との交点の数が偶数か奇数かにより判定することができるが(図12(b)参照)、この判定処理を要素点数×テンプレート数だけ実施しなければならないため、演算回数が非常に多くなってしまうことが懸念される。メモリ使用量の増加は、コストアップにつながり、計算回数の増加は、リアルタイム性が要求される現在位置算出ができなくなるとともにマップマッチング処理に使用されるCPUで動作する他の機能へも影響を及ぼしてしまう。
【特許文献1】特開平2−130415号公報
【特許文献2】特開平10−300492号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、上述した問題にかんがみなされたものであり、できるだけ計算回数を抑えながら、道路リンク上の現在位置を精度良く算出することができる現在位置算出装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するためになされた請求項1に記載の現在位置算出装置は、絶対位置情報取得手段と、道路データ取得手段と、走行可能領域中央軌跡算出手段と、推定走行位置特定手段と、評価手段と、現在位置決定手段とを備える。絶対位置情報取得手段は、自車両の絶対位置を特定可能な情報である絶対位置情報を取得し、道路データ取得手段は、道路リンク及び道路の幅員の情報を取得する。また、走行可能領域中央軌跡算出手段は、道路データ取得手段から取得される道路リンク及び幅員の情報に基づき、道路リンク毎に自車両の走行可能領域を算出し、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する。また、推定走行位置特定手段は、絶対位置情報取得手段により取得された絶対位置情報に基づき自車両の推定走行位置を特定する。また、評価手段は、推定走行位置特定手段により推定走行位置が特定されると、その特定された推定走行位置と、走行可能領域中央軌跡算出手段によって算出された走行可能領域中央軌跡との間の距離に基づいて走行可能領域中央軌跡に対応する道路リンクの評価を行う。また、現在位置決定手段は、評価手段による道路リンクの評価に基づき、自車両が現在走行している可能性の高い道路リンクを選択し、その選択した道路リンク上の位置に自車両の現在位置を決定する。
【0012】
このように、推定走行位置と走行可能領域中央軌跡との間の距離に基づき走行可能領域中央軌跡に対応する道路リンクの評価を行い、その評価に基づいて自車両が存在する道路リンクを選択して自車両の現在位置を決定するようになっていれば、道路リンクを直接用いて評価を行う従来の現在位置決定装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、本発明の現在位置算出装置は、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0013】
ところで、自車両の相対的な移動情報を取得する相対移動情報取得手段をさらに備えるように現在位置算出装置を構成し、推定走行位置特定手段は、絶対位置情報に替えて相対移動情報取得手段により取得された移動情報に基づき自車両の推定走行位置を特定するようになっていてもよい(請求項2)。
【0014】
このように、自車両の相対的な移動情報に基づいて推定走行位置を求めるようになっていても、上述した請求項1に記載の現在位置算出装置と同様の効果を得ることができる。
また、上記課題を解決するためになされた請求項3に記載の現在位置算出装置は、絶対位置情報取得手段と、相対移動情報取得手段と、道路データ取得手段と、現在位置候補設定手段と、道路リンク列特定手段と、走行可能領域中央軌跡算出手段と、現在位置候補更新手段と、推定走行位置特定手段と、評価手段と、現在位置決定手段とを備える。絶対位置情報取得手段は、自車両の絶対位置を特定可能な情報である絶対位置情報を取得し、相対移動情報取得手段は、自車両の相対的な移動情報を取得し、道路データ取得手段は、道路リンク及び道路の幅員の情報を取得する。また、現在位置候補設定手段は、絶対位置情報取得手段により取得される絶対位置情報に基づき、道路データ取得手段により取得される道路リンクの中から自車両が走行している可能性のある道路リンクを少なくとも一つ抽出し、抽出した各々の道路リンク上に現在位置の候補となる現在位置候補を設定する。また、道路リンク列特定手段は、設定されている現在位置候補の位置する道路リンクを起点として、そこから自車両が走行可能な道路リンク列を現在位置候補毎に少なくとも一つ、道路データ取得手段から取得される道路リンクに基づいて特定する。また、走行可能領域中央軌跡算出手段は、道路リンク列特定手段により道路リンク列が特定されると、道路リンク列毎に、道路データ取得手段により取得される幅員の情報に基づいて自車両の走行可能領域を算出するとともに、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する。現在位置候補更新手段は、相対移動情報取得手段により取得される移動情報に基づき、設定されている現在位置候補の位置をそれぞれ更新し、推定走行位置特定手段は、絶対位置情報取得手段により取得された絶対位置情報に基づき自車両の推定走行位置を特定する。また、評価手段は、推定走行位置特定手段により推定走行位置が特定されると、その特定された推定走行位置と、走行可能領域中央軌跡算出手段により算出されている各走行可能領域中央軌跡とに基づいて各走行可能領域中央軌跡に対応する道路リンク列上に存在する現在位置候補の評価を行う。現在位置決定手段は、評価手段により各現在位置候補の評価が行われると、相対的に評価の高い現在位置候補を一つ選択し、その選択した現在位置候補を、道路リンク上の自車両の現在位置として決定する。
【0015】
このように、推定走行位置と走行可能領域中央軌跡との間の距離に基づき現在位置候補(走行可能領域中央軌跡に対応する道路リンク上に存在する現在位置候補)の評価を行い、その評価に基づいて道路リンク上の自車両の現在位置を決定するようになっていれば、道路リンクを直接用いて評価を行う従来の現在位置決定装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、本発明の現在位置算出装置は、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、また、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0016】
ところで、道路リンク列特定手段は、前記起点より、所定の距離、又は、所定のリンク数に達するまで道路リンクをたどり、道路リンク列を特定するようになっているとよい(請求項4)。なお、「所定のリンク数」や「所定の距離」は、現在位置算出装置のハードウェア処理能力や、現在位置算出装置に望まれる位置精度に応じて決定すればよい。
【0017】
このようになっていれば、必要以上に長い道路リンク列が特定されることを防止することができる。
また、道路リンク列特定手段は、直進方向に連なる道路リンクを優先して道路リンク列を特定するようになっているとよい(請求項5)。
【0018】
一般的に、交差点では右左折する割合よりも、直進する割合の方が高い。したがって、直進方向に連なる道路リンクを優先して道路リンク列を選定するようになっていれば、より走行可能性の高い道路リンク列を特定することができる。
【0019】
また、案内経路に関する情報である案内経路情報を取得する案内経路情報取得手段をさらに備えるように現在位置算出装置を構成し、道路リンク列特定手段は、案内経路情報取得手段により取得される案内経路情報に基づいて特定される案内経路に沿う道路リンク列を優先して特定するようになっているとよい(請求項6)。
【0020】
一般的に、案内が行われている経路(案内経路)は近い将来に走行する可能性が非常に高い。したがって、案内経路に沿う道路リンク列を優先して特定するようになっていれば、走行可能性の高い道路リンク列を特定することができる。
【0021】
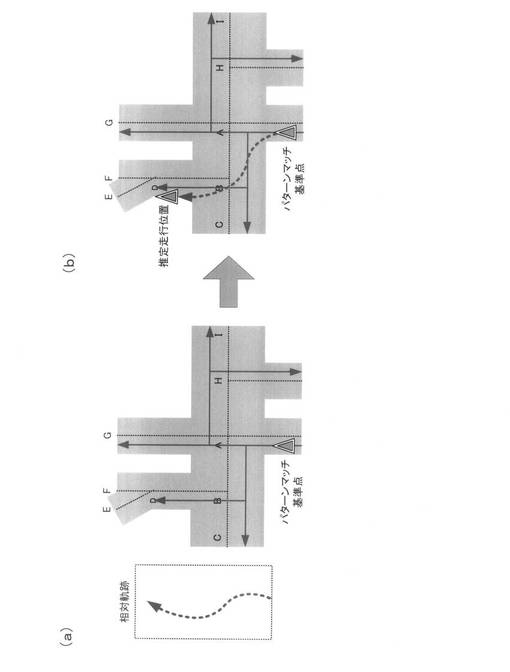
また、移動情報取得手段により取得された移動情報に基づいて過去の自車両の移動軌跡を算出する移動軌跡算出手段を備えるように現在位置算出装置を構成し、推定走行位置特定手段は、絶対位置情報取得手段により取得された絶対位置情報に基づいて自車両の推定走行位置を特定することに替えて、走行可能領域中央軌跡算出手段により算出された走行可能領域中央軌跡のうち、移動軌跡算出手段により算出された移動軌跡と最も一致性が高いと判断される走行可能領域中央軌跡を所定のタイミング毎に選択するとともに、選択した走行可能領域中央軌跡上にパターンマッチ基準点を設定し、以降、移動軌跡算出手段により算出された移動軌跡の起点をパターンマッチ基準点とすることによって移動軌跡より求まる位置を推定走行位置として特定するようになっていてもよい(請求項7)。
【0022】
このように、所定のタイミング毎にパターンマッチ基準点を設定して移動軌跡の起点とすることにより、演算回数を抑えながら、精度よく推定走行位置を特定することができる。
【0023】
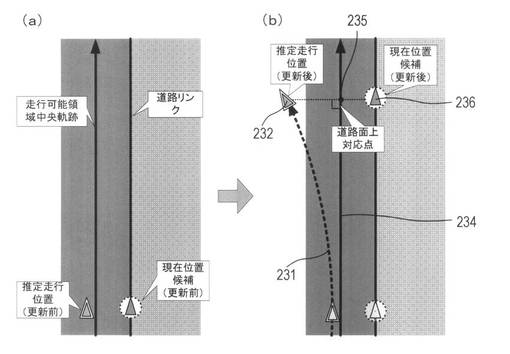
なお、現在位置候補更新手段は、推定走行位置から走行可能領域中央軌跡への最近傍点を道路面上対応点として決定し、その決定した道路面上対応点に対応する道路リンク上の位置を、更新後の現在位置候補とするようになっているとよい(請求項8)。
【0024】
このようになっていれば、最近傍点以外の点を道路面上対応点とするような場合と比較し、適切に現在位置候補を更新することができる。
また、評価手段は、推定走行位置特定手段により特定された推定走行位置と、走行可能領域中央軌跡算出手段により算出されている各走行可能領域との間の距離に基づき、前記評価を行うようになっていてもよい(請求項9)。
【0025】
このようになっていれば、適切に現在位置候補の評価を行うことができる。
ところで、評価手段により前記各現在位置候補の評価が行われると、相対的に評価の低い現在位置候補を選択し、その選択した現在位置候補を処理対象から削除(除外)する現在位置候補削除手段をさらに備えるように現在位置算出装置を構成するとよい(請求項10)。
【0026】
このようになっていれば、現在位置の算出精度を維持しながら、現在位置候補を適切な数に抑えることができ、現在位置算出装置の実現に必要なハードウェアリソースを抑えることができる。
【0027】
ところで、上述した各手段としての機能をプログラムによって実現してもよい(請求項11)。このようなプログラムを、ナビゲーション装置等が内蔵するコンピュータに実行させれば、そのナビゲーション装置は、上述した本発明の現在位置算出装置と同様の作用及び効果を奏するナビゲーション装置として機能する。また、プログラムはネットワーク等を用いて流通させることも可能である上、ナビゲーション装置等におけるプログラムの入れ替えは、部品の入れ替えに比較して容易である。したがって、ナビゲーション装置等の機能向上を容易に行うこともできる。
【発明を実施するための最良の形態】
【0028】
以下、本発明が適用された実施形態について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0029】
[構成の説明]
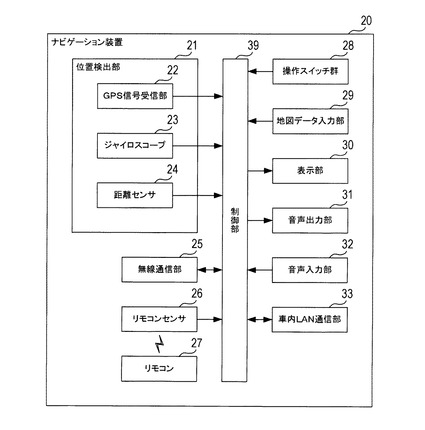
図1は、本発明の現在位置算出装置の機能が組み込まれたナビゲーション装置20の概略構成を示すブロック図である。
【0030】
ナビゲーション装置20は車両に搭載され、車両の現在位置を検出する位置検出部21と、外部と無線通信を行う無線通信部25と、利用者からの各種指示を入力するための操作スイッチ群28と、操作スイッチ群28と同様に各種指示を入力可能であってナビゲーション装置20の本体とは別体となったリモートコントロール端末(以下、リモコンと称す)27と、リモコン27からの信号を入力するリモコンセンサ26と、地図データや音声データ等が記録された地図記憶媒体からデータを入力する地図データ入力部29と、地図や各種情報の表示を行うための表示部30と、各種のガイド音声等を出力するための音声出力部31と、利用者が発話した音声を入力してその入力した音声に基づく電気信号を出力する音声入力部32と、車内LANに接続された各種ECU等と通信を行う車内LAN通信部33と、上述した位置検出部21,無線通信部25,操作スイッチ群28,リモコンセンサ26,地図データ入力部29,音声入力部32,車内LAN通信部33からの入力に応じて各種処理を実行し、無線通信部25,表示部30,音声出力部31,車内LAN通信部33を制御する制御部39とを備えている。
【0031】
位置検出部21は、GPS(Global Positioning System)用の人工衛星からの電波を図示しないGPSアンテナを介して受信してその受信信号を制御部39へ出力するGPS信号受信部22と、車両に加えられる回転運動の大きさを検出するジャイロスコープ23と、車両の走行した距離を検出するための距離センサ24とを備えている。そして、これら各部22〜24からの出力信号に基づいて制御部39が、車両の位置,方位,速度等を算出する。なお、GPS信号受信部22からの出力信号に基づいて現在位置を求める方式は様々な方式があるが、単独測位方式、相対測位方式のいずれであってもよい。
【0032】
操作スイッチ群28は、表示部30の表示面と一体に構成されたタッチパネル及び表示部30の周囲に設けられたメカニカルなキースイッチ等から構成される。なお、タッチパネルと表示部30とは積層一体化されており、タッチパネルには、感圧方式,電磁誘導方式,静電容量方式,あるいはこれらを組み合わせた方式など各種の方式があるが、そのいずれを用いてもよい。
【0033】
リモコン27は、複数のボタンから構成されており、いずれかのボタンが押下されるとそのボタンの種類に応じた信号が赤外線等の近距離無線通信を介してリモコンセンサ26に届くように構成されている。
【0034】
リモコンセンサ26は、リモコン27から送られる信号を受信し、受信した信号を制御部39へ出力するようになっている。
無線通信部25は、路側に設置された光ビーコンや電波ビーコン等を介してVICSの情報センタから事故情報や渋滞情報等を取得したり、パケット通信網を介してサーバから観光案内情報等を取得したりする。
【0035】
地図データ入力部29は、図示しない地図データ記憶媒体(例えばハードディスクやDVD−ROM等)に記憶された各種データを入力するための装置である。地図データ記憶媒体には、地図データ(ノードデータ、リンクデータ、道路幅員データ、道路種別データ、通行規制データ、コストデータ、道路名称データ、交差点データ等)、POIデータ(POI名称データ、ジャンルデータ、位置データ等)、案内用の音声データ、音声認識データ等が記憶されている。なお、地図データ記憶媒体からこれらのデータを入力する代わりに、通信ネットワークを介してこれらのデータを入力するようになっていてもよい。
【0036】
表示部30は、液晶ディスプレイや有機ELディスプレイ等からなり、表示部30の表示画面には、位置検出部21にて検出した車両の現在位置と地図データ入力部29より入力された地図データとから特定した現在地を示すマーク、目的地までの誘導経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイド等も表示できる。
【0037】
音声入力部32は、利用者が音声を入力(発話)するとその入力した音声に基づく電気信号(音声信号)を制御部39に出力するものである。利用者はこの音声入力部32に様々な音声を入力することにより、ナビゲーション装置20を操作することができる。
【0038】
車内LAN通信部33は、車内LANに接続された各種のECU(エンジンECU、AT−ECU、ブレーキECU等)や各種のセンサ(方向指示器センサ、ドア開閉センサ等)との通信を担う。
【0039】
制御部39は、CPU,ROM,RAM,フラッシュメモリ,I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びフラッシュメモリ等に記憶されたプログラムに基づいて各種処理を実行する。例えば、位置検出部21からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出し、地図データ入力部29を介して読み込んだ現在位置付近の地図等を表示部30に表示する現在位置表示動作や、地図データ入力部29を介して読み込んだ地図データと、操作スイッチ群28やリモコン27等がユーザによって操作されることにより設定された目的地とに基づいて現在位置から目的地までの最適な経路を算出する経路算出処理や、その算出した経路を表示部30に表示させたり音声出力部31に音声として出力させたりすることにより経路を案内する経路案内処理等を実行する。
【0040】
[動作の説明]
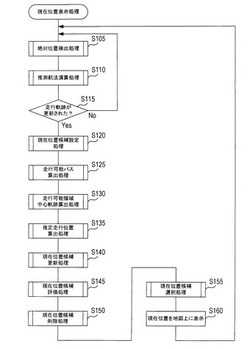
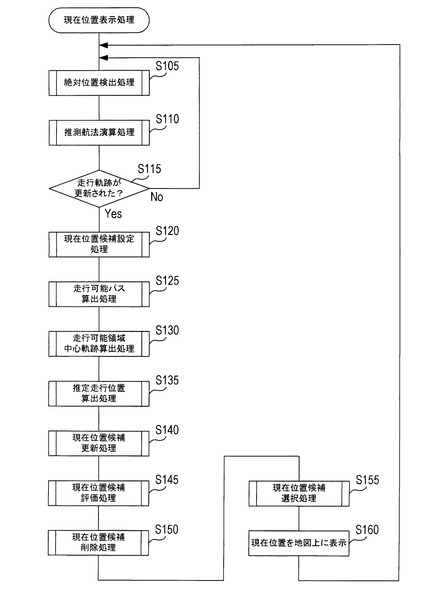
次に、ナビゲーション装置20の動作のうち、本発明に関連する動作である現在位置表示動作について、図2のフローチャートを用いて説明する。現在位置表示動作は、ナビゲーション装置20への電力供給が開始された際に実行が開始される。
【0041】
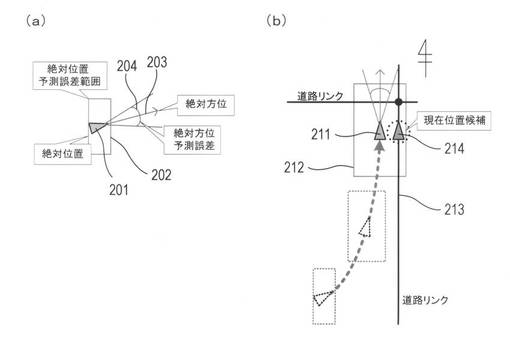
(1)絶対位置検出処理(S105)
制御部39は、現在位置表示動作の実行を開始すると、まず、絶対位置検出処理を実行する(S105)。この絶対位置検出処理では、GPS信号受信部22より得られた信号に基づいて自車両の絶対位置、移動速度、及び、絶対方位を検出(演算)する。なお、自車両の絶対位置には、GPS信号受信部22より得られた信号の誤差や計算時の丸め誤差等により、図3(a)に示すように、絶対位置201に対して絶対位置予測誤差範囲202を限度とする位置誤差がある。また、自車両の絶対方位203には、絶対方位予測誤差範囲204を限度とする方位誤差がある。
【0042】
(2)推測航法演算処理(S110)
次に、制御部39は、推測航法演算処理を実行する(S110)。この推測航法演算処理では、ジャイロスコープ23及び距離センサ24から得られる信号に基づき、前回の処理実行時からの自車両の相対移動距離及び相対方位変化量を求め、それらに基づき前回の処理実行時からの走行軌跡(移動軌跡)を算出する。そして、その算出した走行軌跡を過去(前回の処理実行時よりも前)に求めた走行軌跡に継ぎ足すことにより、過去から現在に渡る相対的な走行軌跡を算出する。なお、ここでいう「相対的」というのは、緯度、経度、東西南北といった絶対的な基準ではなく、過去が基準という意味である。また、S105で演算した絶対位置を用い、各センサの誤差を補正して相対移動距離及び相対方位変化量を求めるようになっているとよい。
【0043】
次に、制御部39は、推測航法演算処理にて算出された走行軌跡が更新されたか否かを判定する(S115)。自車両が移動していれば、走行軌跡が更新されたと判定されることになるし、例えば、走行軌跡を求めるタイミングが所定時間毎であるならば、走行軌跡を求めるタイミングが到来した直後に、走行軌跡が更新されたと判定されることになる。走行軌跡が更新されたと判定した場合は(S115:Yes)、S120へ処理を移行し、走行軌跡は更新されていないと判定した場合は(S115:No)、S105へ処理を戻す。
【0044】
(3)現在位置候補設定処理(S120)
走行軌跡が更新されたと判定した場合に進むS120では、制御部39は、現在位置候補設定処理を実行する(S120)。この現在位置候補設定処理では、S105で演算した絶対位置及び絶対方位とそれらの予測誤差に基づいて自車両が走行している可能性のあるリンクを、地図データ入力部29を介して地図データを参照して特定し、その特定したリンク上に現在位置候補を設定する。例えば、図3(b)に示すように、自車両の絶対位置が地点211であり、その予測誤差範囲がエリア212であり、自車両の絶対方位が北である場合には、エリア212に掛かるリンクであって、北方向に延びているリンクであるリンク213を特定する。そして、特定したリンク213上の点であって、絶対位置に最も近い点214を現在位置候補として設定する。なお、自車両が走行している可能性のあるリンクは複数特定してもよく、その特定したリンク毎に現在位置候補を設定してもよい。
【0045】
(4)走行可能パス算出処理(S125)
次に、制御部39は、走行可能パス算出処理を実行する(S125)。この走行可能パス算出処理では、S120で設定された現在位置候補(又は現在位置候補が存在している道路リンク)を起点として、通行規制を考慮して考え得る走行可能な道路リンク列を走行可能パスとして全て算出(特定)する。なお、算出するリンク列の長さは、所定距離以下とする。距離で制限する替わりに、リンク数で、算出する走行可能パスの長さを制限してもよい。また、車両の走行方向を考慮して走行可能パスを算出するようになっているとよい。また、S120で現在位置候補が複数設定された場合は、それぞれの候補毎に走行可能パスを算出する。
【0046】
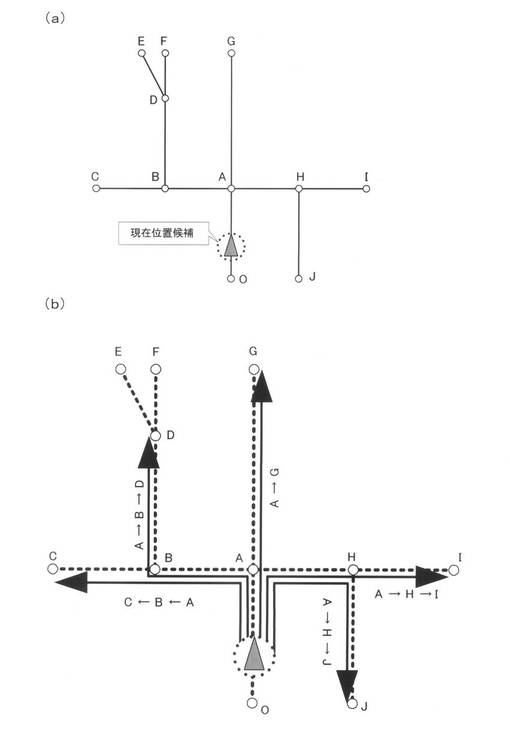
ここで具体例を、図4を用いて説明する。図4(a)に示すようなノード配置の場合において、ノードOとノードAの間(リンクOA上)に現在位置候補が設定されていたとする。この場合においては、走行可能パス算出処理では、図4(b)に示すような、リンクOA→リンクAB→リンクBC(ノードA→ノードB→ノードC)という走行可能パス、リンクOA→リンクAB→リンクBD(ノードA→ノードB→ノードD)という走行可能パス、リンクOA→リンクAG(ノードA→ノードG)という走行可能パス、リンクOA→リンクAH→リンクHI(ノードA→ノードH→ノードI)という走行可能パス、リンクOA→リンクAH→リンクHJ(ノードA→ノードH→ノードJ)という走行可能パスの5通りの走行可能パスが算出できる。なお、ノードDでは、ノードEにつながるリンクとノードFへつながるリンクの二つのリンクが存在するが、走行可能パスがノードDまで算出された時点で、現在位置候補からの走行可能パスの長さが所定距離に達していた場合には、それ以降のリンク(又はノード)の探索は行わない。
【0047】
なお、一般的に、交差点では右左折する割合よりも、直進する割合の方が高い。したがって、直進方向に連なる道路リンクを優先して道路リンク列を選定するようにしてもよい。そして、自車両が右左折したことを検知した場合に、自車両の走行方向に接続するリンク列を取得し走行可能パスを算出し直すようにしてもよい。このようにすれば、走行可能性の高い道路リンク列を算出することができ、処理効率が高まる。
【0048】
また、ナビゲーション装置20において案内経路が設定されている場合には、その案内経路の情報(案内経路情報)を取得するステップを走行可能パス算出処理の前に実行し、案内経路情報に基づいて特定される案内経路に沿う道路リンク列を優先して算出するようになっていてもよい。一般的に、案内が行われている経路(案内経路)は近い将来に走行する可能性が非常に高い。したがって、案内経路に沿う道路リンク列を優先して算出するようになっていれば、走行可能性の高い道路リンク列を算出することができ、処理効率が高まる。
【0049】
(5)走行可能領域中央軌跡算出処理(S130)
次に、制御部39は、走行可能領域中央軌跡算出処理を実行する(S130)。この走行可能領域中央軌跡算出処理では、作成した走行可能パス毎に、地図データに含まれる道路幅員データ(又は、車線数及び車線毎の幅を示す情報)から、走行可能な道路面としての走行可能領域を算出する。その際、通行方向・通行規制(一方通行・双方向通行、右側通行・左側通行)を考慮した走行可能領域を求める。なお、双方向通行の道路リンクであれば、リンクに対して通行可能な領域側のみを、一方通行であればリンクを中心とした両側を走行可能領域とする。走行可能領域を算出すると、その領域の中央部を示す中央線を求め、その中央線を結んで走行可能領域中央軌跡を算出する。
【0050】
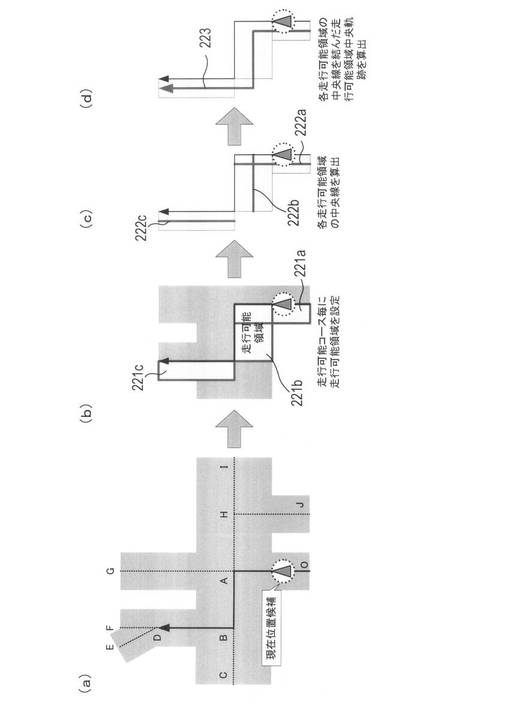
ここで具体例を、図5を用いて説明する。図5(a)に示すような、道路リンク列(リンクOA→リンクAB→リンクBD)についての走行可能領域中央軌跡を算出する場合について説明する。
【0051】
まず、道路リンク列を構成する道路リンク毎に、道路幅員データ(又は、車線線・車線幅)の情報に基づいて通行方向を考慮しつつ、走行可能領域221a〜221cを求める(図5(b)参照)。つまり、自車両が走行可能な道路幅分だけ道路リンクを基準として領域を設定する。
【0052】
続いて、設定した走行可能領域を走行するとした場合の中央線である走行可能領域中央線222a〜222cを算出する(図5(c)参照)。
続いて、走行可能領域中央線222a〜222cのそれぞれを短縮又は延長して接続し、走行可能領域中央軌跡223を算出する(図5(d)参照)。
【0053】
なお、道路幅員データ(又は、車線数及び車線毎の幅を示す情報)を使用し、走行可能領域を算出したが、これらのデータが未整備の場合には、道路種別によって固定の幅員を想定して、走行可能領域を算出してもよい。
【0054】
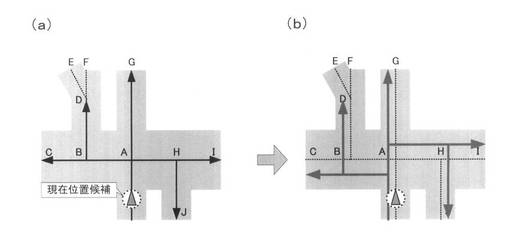
このような走行可能領域中央軌跡算出処理の結果、例えば、図6(a)に示す各道路リンク列に対し、図6(b)に示すような各走行可能領域中央軌跡が算出される。
(6)推定走行位置算出処理(S135)
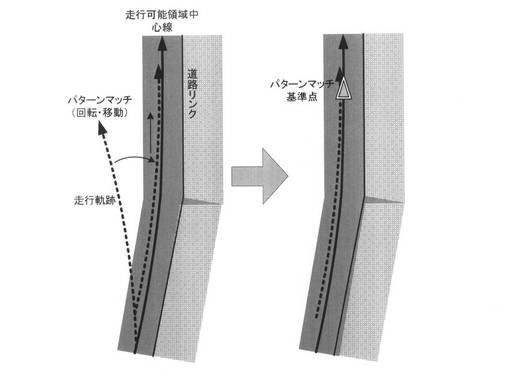
次に、制御部39は、推定走行位置算出処理を実行する(S135)。この推定走行位置算出処理では、過去所定区間(例えば過去200m)の走行軌跡と各走行可能領域中央軌跡とのパターンマッチを行う。この「走行軌跡」というのは、上述したS110において算出された走行軌跡である。パターンマッチは相対軌跡と走行可能領域中央軌跡との距離差・方位差が最も小さくなるように移動・回転することにより行う。移動・回転させる補正量は、相対軌跡の精度上発生し得る誤差、パターンマッチにより発生し得る誤差、及び地図データの精度上発生し得る誤差の範囲内に限定するものとする。その結果、走行軌跡と走行可能領域中央軌跡との一致性が最も高いと判断された走行可能領域中央軌跡上に、以降の処理で起点となるパターンマッチ基準点を生成する(図7参照)。
【0055】
なお、パターンマッチ基準点の更新判定は処理負荷低減のために、所定距離走行毎(例えば50m走行毎)に行ってもよいし、右左折・カーブ走行後等、走行軌跡に特徴が現れたタイミングあるいはそれらの双方のタイミングに行うようにしてもよい。
【0056】
次に、最新のパターンマッチ基準点を起点として、走行軌跡から得られた位置を推定走行位置として設定する。ここで具体例を、図8用いて説明する。図8(a)には、相対軌跡図と、パターンマッチ基準点が設定された走行可能領域中央軌跡図とが描かれており、走行可能領域中央軌跡図におけるパターンマッチ基準点を基点として、走行軌跡を重ねたものが、図8(b)に示された図である。そして、その走行軌跡の先端部分を推定走行位置231として設定する。
【0057】
走行軌跡は、長い区間であれば誤差が累積していくが、短い区間であれば局所的な変動が小さく車両の走行軌跡形状を最も正確に表現できるという特徴を持つ。しかしながら、このような走行軌跡を用いて推定走行位置を設定する替わりに、S105で検出された絶対位置情報によって定まる位置を推定走行位置として設定してもよい。
【0058】
(7)現在位置候補更新処理(S140)
次に、制御部39は、現在位置候補更新処理を実行する(S140)。この現在位置候補更新処理では、S135で新たに算出した推定走行位置から走行可能領域中央軌跡への最近傍点を道路面上対応点として決定する。そして、道路面上対応点に対応する道路リンク上の位置を新たな現在位置候補とする。これにより各現在位置候補を更新する。
【0059】
ここで具体例を、図9を用いて説明する。図9(a)は、新たな推定走行位置が算出される前(更新前)の状態である。図9(b)は、推定走行位置が新たに算出された後(更新後)の状態である。つまり、図示しないパターンマッチ基準点を起点して走行軌跡231から新たな推定走行位置232が算出されると、その算出された推定走行位置232から走行可能領域中央軌跡234への最近傍点である道路面上対応点235を決定する。そして、その道路面上対応点235に対応する道路リンク上の位置を更新後の現在位置候補236とする。このような処理が、現在設定されている現在位置候補全てに対して行われる。
【0060】
(8)現在位置候補評価処理(S145)
次に、制御部39は、現在位置候補評価処理を実行する(S145)。この現在位置候補評価処理では、推定走行位置と道路面上対応点との距離差及び道路幅員から、走行可能領域からの推定走行位置の乖離距離を求め、これを元に対応する各現在位置候補の確からしさを示す評価値を算出する。この評価値は推定走行方位と対応する走行可能領域中央軌跡の方位との方位差や、絶対位置と道路上対応点との距離差・方位差など、その他の道路形状と走行軌跡・絶対位置との関係から得られる別の指標を組み合わせた値としてもよく、また、それらの所定区間の平均値としたり、過去の積算値と最新の瞬間値に所定の重みづけ係数をかけて積算した値を評価値としたりしてもよい。
【0061】
ここで具体例を、図10を用いて説明する。推定走行位置241と道路面上対応点242との距離差D及び道路幅員Wから、走行可能領域243から推定走行位置241までの乖離距離Lを求める。このようにして算出した乖離距離Lを用い、例えば、評価値(t)=評価値(t-1)×係数k+乖離距離L×(1−係数k)といった式により、評価値を求める。
【0062】
(9)現在位置候補削除処理(S150)
次に、制御部39は、現在位置候補削除処理を実行する(S150)。この現在位置候補削除処理では、S145で算出した各評価値に基づき、正しい候補である可能性が低いと相対的に判断できる候補を削除する(以降、処理対象外として扱う)。なお、この判断は、S145で算出した評価値に加え、現在位置候補と絶対位置との距離差等、他の要素を組み合わせて行ってもよい。
【0063】
(10)現在位置候補選択処理(S155)
次に、制御部39は、現在候補選択処理を実行する(S155)。この現在位置候補選択処理では、各現在位置候補の評価値及び前回の選択結果から、現在位置として表示部26に出力すべき現在位置候補を選択する。選択方法としては、例えば、現在位置候補毎に今回と前回の評価値を合計して最も高い現在位置候補を選択したり、前回選択した現在位置候補の評価値に所定値を足し合わせた上で、最も評価値の高い現在位置候補を選択したりすることが考えられる。
【0064】
現在位置候補を選択すると、その現在位置候補の位置を表示部30に表示されている地図に所定のアイコンを重畳することによって表示させる(S160)。なお、前回に表示させたアイコンは削除する。そして、制御部39は、S105へ処理を戻す。
【0065】
[実施形態の効果]
上記実施形態のナビゲーション装置20は、走行可能領域の中央部を示す走行可能領域中央軌跡を算出し、その算出した走行可能領域中央軌跡と推定走行位置との間の距離に基づき走行可能領域中央軌跡に対応する道路リンク上に存在する現在位置候補の評価を行う(S140)。したがって、道路リンクを直接用いて評価を行う従来の現在位置決定装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、ナビゲーション装置20は、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、また、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0066】
また、上記実施形態のナビゲーション装置20は、走行可能パス算出処理(S125)において、現在位置候補(又は現在位置候補が存在している道路リンク)を起点として、所定の距離、又は、所定のリンク数に達するまで道路リンクをたどり、道路リンク列(走行可能パス)を特定する。したがって、必要以上に長い道路リンク列が特定されることがない。
【0067】
また、上記実施形態のナビゲーション装置20は、推測航法演算処理(S110)において、ジャイロスコープ23及び距離センサ24から得られる信号に基づき、前回の処理実行時からの自車両の相対移動距離及び相対方位変化量を求め、それらに基づき前回の処理実行時からの走行軌跡を算出する。そして、走行軌跡と最も一致性が高いと判断される走行可能領域中央軌跡を所定のタイミング毎に選択するとともに、選択した走行可能領域中央軌跡上にパターンマッチ基準点を設定し、以降、走行軌跡の起点をパターンマッチ基準点とすることによって走行軌跡より求まる位置を推定走行位置とする(S135)。
【0068】
したがって、都度、走行軌跡と走行可能領域中央軌跡とをマッチングする場合と比較して、演算回数を抑えることができ、効率よく推定走行位置を特定することができる。
また、上記実施形態のナビゲーション装置20は、推定走行位置から走行可能領域中央軌跡への最近傍点を道路面上対応点として決定し、現在位置候補更新処理(S140)において、その決定した道路面上対応点に対応する道路リンク上の位置を、更新後の現在位置候補とするようになっている。したがって、最近傍点以外の点を道路面上対応点とするような場合と比較して、適切に現在位置候補を更新することができる。
【0069】
また、上記実施形態のナビゲーション装置20は、現在位置候補評価処理(S145)において、推定走行位置と各走行可能領域との間の距離に基づき、各現在位置候補の評価を行うようになっている。したがって、適切に現在位置候補の評価を行うことができる。
【0070】
また、上記実施形態のナビゲーション装置20は、現在位置候補削除処理(S150)において、相対的に評価の低い現在位置候補を選択し、その選択した現在位置候補を削除する。したがって、現在位置候補を適切な数に抑えることができ、ナビゲーション装置20の実現に必要なハードウェアリソースを抑えることができる。
【0071】
[特許請求の範囲との対応]
上記実施形態の説明で用いた用語と、特許請求の範囲に記載した用語との対応を示す。絶対位置検出処理(S105)が絶対位置情報取得手段としての機能に相当し、推測航法演算処理(S110)が相対移動情報取得手段及び移動軌跡算出手段としての機能に相当し、地図データ入力部29が道路データ取得手段に相当する。また、現在位置候補設定処理(S120)が現在位置候補設定手段としての機能に相当し、走行可能パス算出処理(S125)が道路リンク列特定手段としての機能に相当し、走行可能領域中央軌跡算出処理(S130)が走行可能領域中央軌跡算出手段としての機能に相当する。また、現在位置候補更新処理(S140)が現在位置候補更新手段としての機能に相当し、推定走行位置算出処理(S135)が推定走行位置特定手段としての機能に相当する。また、現在位置候補評価処理(S145)が評価手段としての機能に相当し、現在位置候補選択処理(S155)が現在位置決定手段としての機能に相当し、現在位置候補削除処理(S150)が現在位置候補削除手段としての機能に相当する。
【0072】
[他の実施形態]
上記実施形態のナビゲーション装置20は、現在位置候補を一又は複数設定し、それぞれの現在位置候補を評価して、最も評価の高い現在位置候補を選択して地図上に表示するようになっていたが、このような現在位置候補を複数設定せずに、絶対位置検出処理(S105)で算出された絶対位置と、その絶対位置付近の道路リンクから算出される走行可能領域中央軌跡との距離に基づいて道路リンクの評価を行い、最も評価の高い道路リンクを選択して、その選択した道路リンク上の位置に自車両の現在位置を決定するようにしてもよい(この各処理が特許請求の範囲の請求項1における推定走行位置特定手段、評価手段及び現在位置決定手段としての機能に相当する)。
【0073】
このようにしても、道路リンクを直接用いて評価を行う従来のナビゲーション装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0074】
また、推測航法演算処理(S110)で算出された走行軌跡を用いて、現在位置付近の道路リンクから算出される走行可能領域中央軌跡とマッチングさせ、最もマッチング度合いの高い走行可能領域中央軌跡に対応する道路リンク上の位置に自車両の現在位置を決定するようにしてもよい(この処理が特許請求の範囲の請求項2における推定走行位置特定手段としての機能に相当する)。このようにしても、同様の効果を得ることができる。
【図面の簡単な説明】
【0075】
【図1】ナビゲーション装置の概略構成を示すブロック図である。
【図2】現在位置表示動作を説明するためのフローチャートである。
【図3】絶対位置検出処理における誤差について説明するための説明図及び、候補設定処理において現在位置候補を設定する様子を説明するための説明図である。
【図4】走行可能パス算出処理において走行可能パスを算出する様子を説明するための説明図である。
【図5】走行可能領域中央軌跡算出処理において走行可能領域中央軌跡を算出する様子を説明するための説明図である。
【図6】走行可能領域中央軌跡算出処理により設定された複数の走行可能領域中央軌跡を説明するための説明図である。
【図7】推定走行位置算出処理においてパターンマッチ基準点を設定する様子を説明するための説明図である。
【図8】最新のパターンマッチ基準点を起点として、走行軌跡から推定走行位置を設定する様子を説明するための説明図である。
【図9】現在位置候補更新処理において現在位置候補を更新する様子を説明するための説明図である。
【図10】現在位置候補評価処理における評価方法を説明するための説明図である。
【図11】従来技術を説明するための説明図である。
【図12】従来技術を説明するための説明図である。
【符号の説明】
【0076】
20…ナビゲーション装置、21…位置検出部、22…GPS信号受信部、23…ジャイロスコープ、24…距離センサ、25…無線通信部、26…リモコンセンサ、27…リモコン、28…操作スイッチ群、29…地図データ入力部、30…表示部、31…音声出力部、32…音声入力部、33…車内LAN通信部、39…制御部。
【技術分野】
【0001】
本発明は、車両の現在位置を算出する現在位置算出装置に関する。
【背景技術】
【0002】
従来、自立航法により走行軌跡を算出し、その算出した走行軌跡と地図データとの相関を取ることにより自車位置を推測するというマップマッチング手法が知られている。例えば、特許文献1に記載された技術は、車両の走行軌跡を一定距離の線分で折線近似するとともに、道路リンクに基づく候補道路も同様に一定距離の線分で折線近似し、折線近似された走行軌跡と折線近似された候補道路とのベクトルのずれが最小となるよう走行軌跡と候補道路とを合わせる(マッチングする)ものである。しかし、マップマッチング手法で使用される道路リンクは、実在する道路面(通行方向の異なる道路も含めた道路領域)のほぼ中心を通過するように設定されていることが一般的であり、このことが原因で正確なマップマッチングができない場合があるという問題を有していた。以下にその例を、図11を用いて説明する。
【0003】
図11(a)に示す例は、交差点Oと、その交差点Oより延びる幅の広い道路OC,ODと、交差点より延びる幅の狭い道路OA,OB,OEとからなる交差点図である。このような交差点には、図11(b)に示すように、道路面のほぼ中心を通過するように道路リンク(リンクデータ)が設定される。
【0004】
このため、車両が交差点のAから進入し、Eへ退出する走行パターンの場合、対応する道路リンク列はAF→FG→GEとなるが、道路リンク列の形状が走行軌跡と合わない区間を含むため、道路リンクと走行軌跡との相関性が低下し、道路上を走行していると見なせない、又は別の道路(例えばAF→FC)の方が相関性が高いと判断されて間違った道路上に自車位置が算出されてしまうことが考えられる。
【0005】
また図11(c)に示す例は、幅の広い道路に奥行きのある駐車スペースが隣接している場合の道路図である。このような配置関係においては道路の駐車スペースとの接続部分は、図11(d)に示すように、駐車スペースの開口部分の中央を道路リンクが通るように設定される(道路リンクBD参照)。
【0006】
このため、車両が道路から駐車スペースに進入する場合に対応する道路リンク列はAB→BD→DEだが、上述した方法のマップマッチングを行うと、道路リンク列AB→BCの方がよりベクトル間のずれが小さくなるため、誤った自車位置が算出されてしまう結果となる。
【0007】
これらの問題点は、実在する道路は領域を持った面であることに対し、マッチングする候補道路を、道路リンク(道路面の中心線)によって近似したことに起因するものであり、同様の問題は具体例を用いて説明した場合に限らず様々な状況で発生する。
【0008】
上述した問題を軽減する手法として、道路の幅員が考慮された形のテンプレートを作成し、そのテンプレート内に車両の走行軌跡が収まるように車両の走行軌跡あるいは進行方位を修正し、現在位置を同定するマップマッチング方法が知られている(特許文献2参照)。具体的には、道路の幅員を用いて2次元の多角形のテンプレートを作成し、所定区間の走行軌跡の要素点がそのテンプレート内に収まっているかどうかで走行軌跡と道路との相似性を判断する(図12(a)参照)。
【0009】
しかしながら、2次元のテンプレート内に要素点が収まっているか否かを判定するためには、テンプレートを構成する要素点数分の座標を扱うためのメモリ領域が、判定に用いるテンプレート数分必要となる。また、要素点がテンプレートに含まれているかどうかの判定は、例えばテンプレート範囲外から対象とする要素点に引いた線分とテンプレートを構成する線分との交点の数が偶数か奇数かにより判定することができるが(図12(b)参照)、この判定処理を要素点数×テンプレート数だけ実施しなければならないため、演算回数が非常に多くなってしまうことが懸念される。メモリ使用量の増加は、コストアップにつながり、計算回数の増加は、リアルタイム性が要求される現在位置算出ができなくなるとともにマップマッチング処理に使用されるCPUで動作する他の機能へも影響を及ぼしてしまう。
【特許文献1】特開平2−130415号公報
【特許文献2】特開平10−300492号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、上述した問題にかんがみなされたものであり、できるだけ計算回数を抑えながら、道路リンク上の現在位置を精度良く算出することができる現在位置算出装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するためになされた請求項1に記載の現在位置算出装置は、絶対位置情報取得手段と、道路データ取得手段と、走行可能領域中央軌跡算出手段と、推定走行位置特定手段と、評価手段と、現在位置決定手段とを備える。絶対位置情報取得手段は、自車両の絶対位置を特定可能な情報である絶対位置情報を取得し、道路データ取得手段は、道路リンク及び道路の幅員の情報を取得する。また、走行可能領域中央軌跡算出手段は、道路データ取得手段から取得される道路リンク及び幅員の情報に基づき、道路リンク毎に自車両の走行可能領域を算出し、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する。また、推定走行位置特定手段は、絶対位置情報取得手段により取得された絶対位置情報に基づき自車両の推定走行位置を特定する。また、評価手段は、推定走行位置特定手段により推定走行位置が特定されると、その特定された推定走行位置と、走行可能領域中央軌跡算出手段によって算出された走行可能領域中央軌跡との間の距離に基づいて走行可能領域中央軌跡に対応する道路リンクの評価を行う。また、現在位置決定手段は、評価手段による道路リンクの評価に基づき、自車両が現在走行している可能性の高い道路リンクを選択し、その選択した道路リンク上の位置に自車両の現在位置を決定する。
【0012】
このように、推定走行位置と走行可能領域中央軌跡との間の距離に基づき走行可能領域中央軌跡に対応する道路リンクの評価を行い、その評価に基づいて自車両が存在する道路リンクを選択して自車両の現在位置を決定するようになっていれば、道路リンクを直接用いて評価を行う従来の現在位置決定装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、本発明の現在位置算出装置は、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0013】
ところで、自車両の相対的な移動情報を取得する相対移動情報取得手段をさらに備えるように現在位置算出装置を構成し、推定走行位置特定手段は、絶対位置情報に替えて相対移動情報取得手段により取得された移動情報に基づき自車両の推定走行位置を特定するようになっていてもよい(請求項2)。
【0014】
このように、自車両の相対的な移動情報に基づいて推定走行位置を求めるようになっていても、上述した請求項1に記載の現在位置算出装置と同様の効果を得ることができる。
また、上記課題を解決するためになされた請求項3に記載の現在位置算出装置は、絶対位置情報取得手段と、相対移動情報取得手段と、道路データ取得手段と、現在位置候補設定手段と、道路リンク列特定手段と、走行可能領域中央軌跡算出手段と、現在位置候補更新手段と、推定走行位置特定手段と、評価手段と、現在位置決定手段とを備える。絶対位置情報取得手段は、自車両の絶対位置を特定可能な情報である絶対位置情報を取得し、相対移動情報取得手段は、自車両の相対的な移動情報を取得し、道路データ取得手段は、道路リンク及び道路の幅員の情報を取得する。また、現在位置候補設定手段は、絶対位置情報取得手段により取得される絶対位置情報に基づき、道路データ取得手段により取得される道路リンクの中から自車両が走行している可能性のある道路リンクを少なくとも一つ抽出し、抽出した各々の道路リンク上に現在位置の候補となる現在位置候補を設定する。また、道路リンク列特定手段は、設定されている現在位置候補の位置する道路リンクを起点として、そこから自車両が走行可能な道路リンク列を現在位置候補毎に少なくとも一つ、道路データ取得手段から取得される道路リンクに基づいて特定する。また、走行可能領域中央軌跡算出手段は、道路リンク列特定手段により道路リンク列が特定されると、道路リンク列毎に、道路データ取得手段により取得される幅員の情報に基づいて自車両の走行可能領域を算出するとともに、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する。現在位置候補更新手段は、相対移動情報取得手段により取得される移動情報に基づき、設定されている現在位置候補の位置をそれぞれ更新し、推定走行位置特定手段は、絶対位置情報取得手段により取得された絶対位置情報に基づき自車両の推定走行位置を特定する。また、評価手段は、推定走行位置特定手段により推定走行位置が特定されると、その特定された推定走行位置と、走行可能領域中央軌跡算出手段により算出されている各走行可能領域中央軌跡とに基づいて各走行可能領域中央軌跡に対応する道路リンク列上に存在する現在位置候補の評価を行う。現在位置決定手段は、評価手段により各現在位置候補の評価が行われると、相対的に評価の高い現在位置候補を一つ選択し、その選択した現在位置候補を、道路リンク上の自車両の現在位置として決定する。
【0015】
このように、推定走行位置と走行可能領域中央軌跡との間の距離に基づき現在位置候補(走行可能領域中央軌跡に対応する道路リンク上に存在する現在位置候補)の評価を行い、その評価に基づいて道路リンク上の自車両の現在位置を決定するようになっていれば、道路リンクを直接用いて評価を行う従来の現在位置決定装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、本発明の現在位置算出装置は、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、また、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0016】
ところで、道路リンク列特定手段は、前記起点より、所定の距離、又は、所定のリンク数に達するまで道路リンクをたどり、道路リンク列を特定するようになっているとよい(請求項4)。なお、「所定のリンク数」や「所定の距離」は、現在位置算出装置のハードウェア処理能力や、現在位置算出装置に望まれる位置精度に応じて決定すればよい。
【0017】
このようになっていれば、必要以上に長い道路リンク列が特定されることを防止することができる。
また、道路リンク列特定手段は、直進方向に連なる道路リンクを優先して道路リンク列を特定するようになっているとよい(請求項5)。
【0018】
一般的に、交差点では右左折する割合よりも、直進する割合の方が高い。したがって、直進方向に連なる道路リンクを優先して道路リンク列を選定するようになっていれば、より走行可能性の高い道路リンク列を特定することができる。
【0019】
また、案内経路に関する情報である案内経路情報を取得する案内経路情報取得手段をさらに備えるように現在位置算出装置を構成し、道路リンク列特定手段は、案内経路情報取得手段により取得される案内経路情報に基づいて特定される案内経路に沿う道路リンク列を優先して特定するようになっているとよい(請求項6)。
【0020】
一般的に、案内が行われている経路(案内経路)は近い将来に走行する可能性が非常に高い。したがって、案内経路に沿う道路リンク列を優先して特定するようになっていれば、走行可能性の高い道路リンク列を特定することができる。
【0021】
また、移動情報取得手段により取得された移動情報に基づいて過去の自車両の移動軌跡を算出する移動軌跡算出手段を備えるように現在位置算出装置を構成し、推定走行位置特定手段は、絶対位置情報取得手段により取得された絶対位置情報に基づいて自車両の推定走行位置を特定することに替えて、走行可能領域中央軌跡算出手段により算出された走行可能領域中央軌跡のうち、移動軌跡算出手段により算出された移動軌跡と最も一致性が高いと判断される走行可能領域中央軌跡を所定のタイミング毎に選択するとともに、選択した走行可能領域中央軌跡上にパターンマッチ基準点を設定し、以降、移動軌跡算出手段により算出された移動軌跡の起点をパターンマッチ基準点とすることによって移動軌跡より求まる位置を推定走行位置として特定するようになっていてもよい(請求項7)。
【0022】
このように、所定のタイミング毎にパターンマッチ基準点を設定して移動軌跡の起点とすることにより、演算回数を抑えながら、精度よく推定走行位置を特定することができる。
【0023】
なお、現在位置候補更新手段は、推定走行位置から走行可能領域中央軌跡への最近傍点を道路面上対応点として決定し、その決定した道路面上対応点に対応する道路リンク上の位置を、更新後の現在位置候補とするようになっているとよい(請求項8)。
【0024】
このようになっていれば、最近傍点以外の点を道路面上対応点とするような場合と比較し、適切に現在位置候補を更新することができる。
また、評価手段は、推定走行位置特定手段により特定された推定走行位置と、走行可能領域中央軌跡算出手段により算出されている各走行可能領域との間の距離に基づき、前記評価を行うようになっていてもよい(請求項9)。
【0025】
このようになっていれば、適切に現在位置候補の評価を行うことができる。
ところで、評価手段により前記各現在位置候補の評価が行われると、相対的に評価の低い現在位置候補を選択し、その選択した現在位置候補を処理対象から削除(除外)する現在位置候補削除手段をさらに備えるように現在位置算出装置を構成するとよい(請求項10)。
【0026】
このようになっていれば、現在位置の算出精度を維持しながら、現在位置候補を適切な数に抑えることができ、現在位置算出装置の実現に必要なハードウェアリソースを抑えることができる。
【0027】
ところで、上述した各手段としての機能をプログラムによって実現してもよい(請求項11)。このようなプログラムを、ナビゲーション装置等が内蔵するコンピュータに実行させれば、そのナビゲーション装置は、上述した本発明の現在位置算出装置と同様の作用及び効果を奏するナビゲーション装置として機能する。また、プログラムはネットワーク等を用いて流通させることも可能である上、ナビゲーション装置等におけるプログラムの入れ替えは、部品の入れ替えに比較して容易である。したがって、ナビゲーション装置等の機能向上を容易に行うこともできる。
【発明を実施するための最良の形態】
【0028】
以下、本発明が適用された実施形態について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0029】
[構成の説明]
図1は、本発明の現在位置算出装置の機能が組み込まれたナビゲーション装置20の概略構成を示すブロック図である。
【0030】
ナビゲーション装置20は車両に搭載され、車両の現在位置を検出する位置検出部21と、外部と無線通信を行う無線通信部25と、利用者からの各種指示を入力するための操作スイッチ群28と、操作スイッチ群28と同様に各種指示を入力可能であってナビゲーション装置20の本体とは別体となったリモートコントロール端末(以下、リモコンと称す)27と、リモコン27からの信号を入力するリモコンセンサ26と、地図データや音声データ等が記録された地図記憶媒体からデータを入力する地図データ入力部29と、地図や各種情報の表示を行うための表示部30と、各種のガイド音声等を出力するための音声出力部31と、利用者が発話した音声を入力してその入力した音声に基づく電気信号を出力する音声入力部32と、車内LANに接続された各種ECU等と通信を行う車内LAN通信部33と、上述した位置検出部21,無線通信部25,操作スイッチ群28,リモコンセンサ26,地図データ入力部29,音声入力部32,車内LAN通信部33からの入力に応じて各種処理を実行し、無線通信部25,表示部30,音声出力部31,車内LAN通信部33を制御する制御部39とを備えている。
【0031】
位置検出部21は、GPS(Global Positioning System)用の人工衛星からの電波を図示しないGPSアンテナを介して受信してその受信信号を制御部39へ出力するGPS信号受信部22と、車両に加えられる回転運動の大きさを検出するジャイロスコープ23と、車両の走行した距離を検出するための距離センサ24とを備えている。そして、これら各部22〜24からの出力信号に基づいて制御部39が、車両の位置,方位,速度等を算出する。なお、GPS信号受信部22からの出力信号に基づいて現在位置を求める方式は様々な方式があるが、単独測位方式、相対測位方式のいずれであってもよい。
【0032】
操作スイッチ群28は、表示部30の表示面と一体に構成されたタッチパネル及び表示部30の周囲に設けられたメカニカルなキースイッチ等から構成される。なお、タッチパネルと表示部30とは積層一体化されており、タッチパネルには、感圧方式,電磁誘導方式,静電容量方式,あるいはこれらを組み合わせた方式など各種の方式があるが、そのいずれを用いてもよい。
【0033】
リモコン27は、複数のボタンから構成されており、いずれかのボタンが押下されるとそのボタンの種類に応じた信号が赤外線等の近距離無線通信を介してリモコンセンサ26に届くように構成されている。
【0034】
リモコンセンサ26は、リモコン27から送られる信号を受信し、受信した信号を制御部39へ出力するようになっている。
無線通信部25は、路側に設置された光ビーコンや電波ビーコン等を介してVICSの情報センタから事故情報や渋滞情報等を取得したり、パケット通信網を介してサーバから観光案内情報等を取得したりする。
【0035】
地図データ入力部29は、図示しない地図データ記憶媒体(例えばハードディスクやDVD−ROM等)に記憶された各種データを入力するための装置である。地図データ記憶媒体には、地図データ(ノードデータ、リンクデータ、道路幅員データ、道路種別データ、通行規制データ、コストデータ、道路名称データ、交差点データ等)、POIデータ(POI名称データ、ジャンルデータ、位置データ等)、案内用の音声データ、音声認識データ等が記憶されている。なお、地図データ記憶媒体からこれらのデータを入力する代わりに、通信ネットワークを介してこれらのデータを入力するようになっていてもよい。
【0036】
表示部30は、液晶ディスプレイや有機ELディスプレイ等からなり、表示部30の表示画面には、位置検出部21にて検出した車両の現在位置と地図データ入力部29より入力された地図データとから特定した現在地を示すマーク、目的地までの誘導経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイド等も表示できる。
【0037】
音声入力部32は、利用者が音声を入力(発話)するとその入力した音声に基づく電気信号(音声信号)を制御部39に出力するものである。利用者はこの音声入力部32に様々な音声を入力することにより、ナビゲーション装置20を操作することができる。
【0038】
車内LAN通信部33は、車内LANに接続された各種のECU(エンジンECU、AT−ECU、ブレーキECU等)や各種のセンサ(方向指示器センサ、ドア開閉センサ等)との通信を担う。
【0039】
制御部39は、CPU,ROM,RAM,フラッシュメモリ,I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びフラッシュメモリ等に記憶されたプログラムに基づいて各種処理を実行する。例えば、位置検出部21からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出し、地図データ入力部29を介して読み込んだ現在位置付近の地図等を表示部30に表示する現在位置表示動作や、地図データ入力部29を介して読み込んだ地図データと、操作スイッチ群28やリモコン27等がユーザによって操作されることにより設定された目的地とに基づいて現在位置から目的地までの最適な経路を算出する経路算出処理や、その算出した経路を表示部30に表示させたり音声出力部31に音声として出力させたりすることにより経路を案内する経路案内処理等を実行する。
【0040】
[動作の説明]
次に、ナビゲーション装置20の動作のうち、本発明に関連する動作である現在位置表示動作について、図2のフローチャートを用いて説明する。現在位置表示動作は、ナビゲーション装置20への電力供給が開始された際に実行が開始される。
【0041】
(1)絶対位置検出処理(S105)
制御部39は、現在位置表示動作の実行を開始すると、まず、絶対位置検出処理を実行する(S105)。この絶対位置検出処理では、GPS信号受信部22より得られた信号に基づいて自車両の絶対位置、移動速度、及び、絶対方位を検出(演算)する。なお、自車両の絶対位置には、GPS信号受信部22より得られた信号の誤差や計算時の丸め誤差等により、図3(a)に示すように、絶対位置201に対して絶対位置予測誤差範囲202を限度とする位置誤差がある。また、自車両の絶対方位203には、絶対方位予測誤差範囲204を限度とする方位誤差がある。
【0042】
(2)推測航法演算処理(S110)
次に、制御部39は、推測航法演算処理を実行する(S110)。この推測航法演算処理では、ジャイロスコープ23及び距離センサ24から得られる信号に基づき、前回の処理実行時からの自車両の相対移動距離及び相対方位変化量を求め、それらに基づき前回の処理実行時からの走行軌跡(移動軌跡)を算出する。そして、その算出した走行軌跡を過去(前回の処理実行時よりも前)に求めた走行軌跡に継ぎ足すことにより、過去から現在に渡る相対的な走行軌跡を算出する。なお、ここでいう「相対的」というのは、緯度、経度、東西南北といった絶対的な基準ではなく、過去が基準という意味である。また、S105で演算した絶対位置を用い、各センサの誤差を補正して相対移動距離及び相対方位変化量を求めるようになっているとよい。
【0043】
次に、制御部39は、推測航法演算処理にて算出された走行軌跡が更新されたか否かを判定する(S115)。自車両が移動していれば、走行軌跡が更新されたと判定されることになるし、例えば、走行軌跡を求めるタイミングが所定時間毎であるならば、走行軌跡を求めるタイミングが到来した直後に、走行軌跡が更新されたと判定されることになる。走行軌跡が更新されたと判定した場合は(S115:Yes)、S120へ処理を移行し、走行軌跡は更新されていないと判定した場合は(S115:No)、S105へ処理を戻す。
【0044】
(3)現在位置候補設定処理(S120)
走行軌跡が更新されたと判定した場合に進むS120では、制御部39は、現在位置候補設定処理を実行する(S120)。この現在位置候補設定処理では、S105で演算した絶対位置及び絶対方位とそれらの予測誤差に基づいて自車両が走行している可能性のあるリンクを、地図データ入力部29を介して地図データを参照して特定し、その特定したリンク上に現在位置候補を設定する。例えば、図3(b)に示すように、自車両の絶対位置が地点211であり、その予測誤差範囲がエリア212であり、自車両の絶対方位が北である場合には、エリア212に掛かるリンクであって、北方向に延びているリンクであるリンク213を特定する。そして、特定したリンク213上の点であって、絶対位置に最も近い点214を現在位置候補として設定する。なお、自車両が走行している可能性のあるリンクは複数特定してもよく、その特定したリンク毎に現在位置候補を設定してもよい。
【0045】
(4)走行可能パス算出処理(S125)
次に、制御部39は、走行可能パス算出処理を実行する(S125)。この走行可能パス算出処理では、S120で設定された現在位置候補(又は現在位置候補が存在している道路リンク)を起点として、通行規制を考慮して考え得る走行可能な道路リンク列を走行可能パスとして全て算出(特定)する。なお、算出するリンク列の長さは、所定距離以下とする。距離で制限する替わりに、リンク数で、算出する走行可能パスの長さを制限してもよい。また、車両の走行方向を考慮して走行可能パスを算出するようになっているとよい。また、S120で現在位置候補が複数設定された場合は、それぞれの候補毎に走行可能パスを算出する。
【0046】
ここで具体例を、図4を用いて説明する。図4(a)に示すようなノード配置の場合において、ノードOとノードAの間(リンクOA上)に現在位置候補が設定されていたとする。この場合においては、走行可能パス算出処理では、図4(b)に示すような、リンクOA→リンクAB→リンクBC(ノードA→ノードB→ノードC)という走行可能パス、リンクOA→リンクAB→リンクBD(ノードA→ノードB→ノードD)という走行可能パス、リンクOA→リンクAG(ノードA→ノードG)という走行可能パス、リンクOA→リンクAH→リンクHI(ノードA→ノードH→ノードI)という走行可能パス、リンクOA→リンクAH→リンクHJ(ノードA→ノードH→ノードJ)という走行可能パスの5通りの走行可能パスが算出できる。なお、ノードDでは、ノードEにつながるリンクとノードFへつながるリンクの二つのリンクが存在するが、走行可能パスがノードDまで算出された時点で、現在位置候補からの走行可能パスの長さが所定距離に達していた場合には、それ以降のリンク(又はノード)の探索は行わない。
【0047】
なお、一般的に、交差点では右左折する割合よりも、直進する割合の方が高い。したがって、直進方向に連なる道路リンクを優先して道路リンク列を選定するようにしてもよい。そして、自車両が右左折したことを検知した場合に、自車両の走行方向に接続するリンク列を取得し走行可能パスを算出し直すようにしてもよい。このようにすれば、走行可能性の高い道路リンク列を算出することができ、処理効率が高まる。
【0048】
また、ナビゲーション装置20において案内経路が設定されている場合には、その案内経路の情報(案内経路情報)を取得するステップを走行可能パス算出処理の前に実行し、案内経路情報に基づいて特定される案内経路に沿う道路リンク列を優先して算出するようになっていてもよい。一般的に、案内が行われている経路(案内経路)は近い将来に走行する可能性が非常に高い。したがって、案内経路に沿う道路リンク列を優先して算出するようになっていれば、走行可能性の高い道路リンク列を算出することができ、処理効率が高まる。
【0049】
(5)走行可能領域中央軌跡算出処理(S130)
次に、制御部39は、走行可能領域中央軌跡算出処理を実行する(S130)。この走行可能領域中央軌跡算出処理では、作成した走行可能パス毎に、地図データに含まれる道路幅員データ(又は、車線数及び車線毎の幅を示す情報)から、走行可能な道路面としての走行可能領域を算出する。その際、通行方向・通行規制(一方通行・双方向通行、右側通行・左側通行)を考慮した走行可能領域を求める。なお、双方向通行の道路リンクであれば、リンクに対して通行可能な領域側のみを、一方通行であればリンクを中心とした両側を走行可能領域とする。走行可能領域を算出すると、その領域の中央部を示す中央線を求め、その中央線を結んで走行可能領域中央軌跡を算出する。
【0050】
ここで具体例を、図5を用いて説明する。図5(a)に示すような、道路リンク列(リンクOA→リンクAB→リンクBD)についての走行可能領域中央軌跡を算出する場合について説明する。
【0051】
まず、道路リンク列を構成する道路リンク毎に、道路幅員データ(又は、車線線・車線幅)の情報に基づいて通行方向を考慮しつつ、走行可能領域221a〜221cを求める(図5(b)参照)。つまり、自車両が走行可能な道路幅分だけ道路リンクを基準として領域を設定する。
【0052】
続いて、設定した走行可能領域を走行するとした場合の中央線である走行可能領域中央線222a〜222cを算出する(図5(c)参照)。
続いて、走行可能領域中央線222a〜222cのそれぞれを短縮又は延長して接続し、走行可能領域中央軌跡223を算出する(図5(d)参照)。
【0053】
なお、道路幅員データ(又は、車線数及び車線毎の幅を示す情報)を使用し、走行可能領域を算出したが、これらのデータが未整備の場合には、道路種別によって固定の幅員を想定して、走行可能領域を算出してもよい。
【0054】
このような走行可能領域中央軌跡算出処理の結果、例えば、図6(a)に示す各道路リンク列に対し、図6(b)に示すような各走行可能領域中央軌跡が算出される。
(6)推定走行位置算出処理(S135)
次に、制御部39は、推定走行位置算出処理を実行する(S135)。この推定走行位置算出処理では、過去所定区間(例えば過去200m)の走行軌跡と各走行可能領域中央軌跡とのパターンマッチを行う。この「走行軌跡」というのは、上述したS110において算出された走行軌跡である。パターンマッチは相対軌跡と走行可能領域中央軌跡との距離差・方位差が最も小さくなるように移動・回転することにより行う。移動・回転させる補正量は、相対軌跡の精度上発生し得る誤差、パターンマッチにより発生し得る誤差、及び地図データの精度上発生し得る誤差の範囲内に限定するものとする。その結果、走行軌跡と走行可能領域中央軌跡との一致性が最も高いと判断された走行可能領域中央軌跡上に、以降の処理で起点となるパターンマッチ基準点を生成する(図7参照)。
【0055】
なお、パターンマッチ基準点の更新判定は処理負荷低減のために、所定距離走行毎(例えば50m走行毎)に行ってもよいし、右左折・カーブ走行後等、走行軌跡に特徴が現れたタイミングあるいはそれらの双方のタイミングに行うようにしてもよい。
【0056】
次に、最新のパターンマッチ基準点を起点として、走行軌跡から得られた位置を推定走行位置として設定する。ここで具体例を、図8用いて説明する。図8(a)には、相対軌跡図と、パターンマッチ基準点が設定された走行可能領域中央軌跡図とが描かれており、走行可能領域中央軌跡図におけるパターンマッチ基準点を基点として、走行軌跡を重ねたものが、図8(b)に示された図である。そして、その走行軌跡の先端部分を推定走行位置231として設定する。
【0057】
走行軌跡は、長い区間であれば誤差が累積していくが、短い区間であれば局所的な変動が小さく車両の走行軌跡形状を最も正確に表現できるという特徴を持つ。しかしながら、このような走行軌跡を用いて推定走行位置を設定する替わりに、S105で検出された絶対位置情報によって定まる位置を推定走行位置として設定してもよい。
【0058】
(7)現在位置候補更新処理(S140)
次に、制御部39は、現在位置候補更新処理を実行する(S140)。この現在位置候補更新処理では、S135で新たに算出した推定走行位置から走行可能領域中央軌跡への最近傍点を道路面上対応点として決定する。そして、道路面上対応点に対応する道路リンク上の位置を新たな現在位置候補とする。これにより各現在位置候補を更新する。
【0059】
ここで具体例を、図9を用いて説明する。図9(a)は、新たな推定走行位置が算出される前(更新前)の状態である。図9(b)は、推定走行位置が新たに算出された後(更新後)の状態である。つまり、図示しないパターンマッチ基準点を起点して走行軌跡231から新たな推定走行位置232が算出されると、その算出された推定走行位置232から走行可能領域中央軌跡234への最近傍点である道路面上対応点235を決定する。そして、その道路面上対応点235に対応する道路リンク上の位置を更新後の現在位置候補236とする。このような処理が、現在設定されている現在位置候補全てに対して行われる。
【0060】
(8)現在位置候補評価処理(S145)
次に、制御部39は、現在位置候補評価処理を実行する(S145)。この現在位置候補評価処理では、推定走行位置と道路面上対応点との距離差及び道路幅員から、走行可能領域からの推定走行位置の乖離距離を求め、これを元に対応する各現在位置候補の確からしさを示す評価値を算出する。この評価値は推定走行方位と対応する走行可能領域中央軌跡の方位との方位差や、絶対位置と道路上対応点との距離差・方位差など、その他の道路形状と走行軌跡・絶対位置との関係から得られる別の指標を組み合わせた値としてもよく、また、それらの所定区間の平均値としたり、過去の積算値と最新の瞬間値に所定の重みづけ係数をかけて積算した値を評価値としたりしてもよい。
【0061】
ここで具体例を、図10を用いて説明する。推定走行位置241と道路面上対応点242との距離差D及び道路幅員Wから、走行可能領域243から推定走行位置241までの乖離距離Lを求める。このようにして算出した乖離距離Lを用い、例えば、評価値(t)=評価値(t-1)×係数k+乖離距離L×(1−係数k)といった式により、評価値を求める。
【0062】
(9)現在位置候補削除処理(S150)
次に、制御部39は、現在位置候補削除処理を実行する(S150)。この現在位置候補削除処理では、S145で算出した各評価値に基づき、正しい候補である可能性が低いと相対的に判断できる候補を削除する(以降、処理対象外として扱う)。なお、この判断は、S145で算出した評価値に加え、現在位置候補と絶対位置との距離差等、他の要素を組み合わせて行ってもよい。
【0063】
(10)現在位置候補選択処理(S155)
次に、制御部39は、現在候補選択処理を実行する(S155)。この現在位置候補選択処理では、各現在位置候補の評価値及び前回の選択結果から、現在位置として表示部26に出力すべき現在位置候補を選択する。選択方法としては、例えば、現在位置候補毎に今回と前回の評価値を合計して最も高い現在位置候補を選択したり、前回選択した現在位置候補の評価値に所定値を足し合わせた上で、最も評価値の高い現在位置候補を選択したりすることが考えられる。
【0064】
現在位置候補を選択すると、その現在位置候補の位置を表示部30に表示されている地図に所定のアイコンを重畳することによって表示させる(S160)。なお、前回に表示させたアイコンは削除する。そして、制御部39は、S105へ処理を戻す。
【0065】
[実施形態の効果]
上記実施形態のナビゲーション装置20は、走行可能領域の中央部を示す走行可能領域中央軌跡を算出し、その算出した走行可能領域中央軌跡と推定走行位置との間の距離に基づき走行可能領域中央軌跡に対応する道路リンク上に存在する現在位置候補の評価を行う(S140)。したがって、道路リンクを直接用いて評価を行う従来の現在位置決定装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、ナビゲーション装置20は、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、また、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0066】
また、上記実施形態のナビゲーション装置20は、走行可能パス算出処理(S125)において、現在位置候補(又は現在位置候補が存在している道路リンク)を起点として、所定の距離、又は、所定のリンク数に達するまで道路リンクをたどり、道路リンク列(走行可能パス)を特定する。したがって、必要以上に長い道路リンク列が特定されることがない。
【0067】
また、上記実施形態のナビゲーション装置20は、推測航法演算処理(S110)において、ジャイロスコープ23及び距離センサ24から得られる信号に基づき、前回の処理実行時からの自車両の相対移動距離及び相対方位変化量を求め、それらに基づき前回の処理実行時からの走行軌跡を算出する。そして、走行軌跡と最も一致性が高いと判断される走行可能領域中央軌跡を所定のタイミング毎に選択するとともに、選択した走行可能領域中央軌跡上にパターンマッチ基準点を設定し、以降、走行軌跡の起点をパターンマッチ基準点とすることによって走行軌跡より求まる位置を推定走行位置とする(S135)。
【0068】
したがって、都度、走行軌跡と走行可能領域中央軌跡とをマッチングする場合と比較して、演算回数を抑えることができ、効率よく推定走行位置を特定することができる。
また、上記実施形態のナビゲーション装置20は、推定走行位置から走行可能領域中央軌跡への最近傍点を道路面上対応点として決定し、現在位置候補更新処理(S140)において、その決定した道路面上対応点に対応する道路リンク上の位置を、更新後の現在位置候補とするようになっている。したがって、最近傍点以外の点を道路面上対応点とするような場合と比較して、適切に現在位置候補を更新することができる。
【0069】
また、上記実施形態のナビゲーション装置20は、現在位置候補評価処理(S145)において、推定走行位置と各走行可能領域との間の距離に基づき、各現在位置候補の評価を行うようになっている。したがって、適切に現在位置候補の評価を行うことができる。
【0070】
また、上記実施形態のナビゲーション装置20は、現在位置候補削除処理(S150)において、相対的に評価の低い現在位置候補を選択し、その選択した現在位置候補を削除する。したがって、現在位置候補を適切な数に抑えることができ、ナビゲーション装置20の実現に必要なハードウェアリソースを抑えることができる。
【0071】
[特許請求の範囲との対応]
上記実施形態の説明で用いた用語と、特許請求の範囲に記載した用語との対応を示す。絶対位置検出処理(S105)が絶対位置情報取得手段としての機能に相当し、推測航法演算処理(S110)が相対移動情報取得手段及び移動軌跡算出手段としての機能に相当し、地図データ入力部29が道路データ取得手段に相当する。また、現在位置候補設定処理(S120)が現在位置候補設定手段としての機能に相当し、走行可能パス算出処理(S125)が道路リンク列特定手段としての機能に相当し、走行可能領域中央軌跡算出処理(S130)が走行可能領域中央軌跡算出手段としての機能に相当する。また、現在位置候補更新処理(S140)が現在位置候補更新手段としての機能に相当し、推定走行位置算出処理(S135)が推定走行位置特定手段としての機能に相当する。また、現在位置候補評価処理(S145)が評価手段としての機能に相当し、現在位置候補選択処理(S155)が現在位置決定手段としての機能に相当し、現在位置候補削除処理(S150)が現在位置候補削除手段としての機能に相当する。
【0072】
[他の実施形態]
上記実施形態のナビゲーション装置20は、現在位置候補を一又は複数設定し、それぞれの現在位置候補を評価して、最も評価の高い現在位置候補を選択して地図上に表示するようになっていたが、このような現在位置候補を複数設定せずに、絶対位置検出処理(S105)で算出された絶対位置と、その絶対位置付近の道路リンクから算出される走行可能領域中央軌跡との距離に基づいて道路リンクの評価を行い、最も評価の高い道路リンクを選択して、その選択した道路リンク上の位置に自車両の現在位置を決定するようにしてもよい(この各処理が特許請求の範囲の請求項1における推定走行位置特定手段、評価手段及び現在位置決定手段としての機能に相当する)。
【0073】
このようにしても、道路リンクを直接用いて評価を行う従来のナビゲーション装置と比較して正確に現在位置を特定することができる(∵道路リンクに比較して走行可能領域中央軌跡の方が実際の自車両の通行位置に近いため)。また、従来の装置のように多角形のテンプレートにおける要素点数分の座標を扱うためのメモリ領域は必要なく、代わりに線分用(走行可能領域中央軌跡用)のメモリ領域を用意することで済み、これに伴い演算回数も少なくて済む。したがって、現在位置の特定に必要なハードウェアリソースが従来の装置と比較して少なくて済む。
【0074】
また、推測航法演算処理(S110)で算出された走行軌跡を用いて、現在位置付近の道路リンクから算出される走行可能領域中央軌跡とマッチングさせ、最もマッチング度合いの高い走行可能領域中央軌跡に対応する道路リンク上の位置に自車両の現在位置を決定するようにしてもよい(この処理が特許請求の範囲の請求項2における推定走行位置特定手段としての機能に相当する)。このようにしても、同様の効果を得ることができる。
【図面の簡単な説明】
【0075】
【図1】ナビゲーション装置の概略構成を示すブロック図である。
【図2】現在位置表示動作を説明するためのフローチャートである。
【図3】絶対位置検出処理における誤差について説明するための説明図及び、候補設定処理において現在位置候補を設定する様子を説明するための説明図である。
【図4】走行可能パス算出処理において走行可能パスを算出する様子を説明するための説明図である。
【図5】走行可能領域中央軌跡算出処理において走行可能領域中央軌跡を算出する様子を説明するための説明図である。
【図6】走行可能領域中央軌跡算出処理により設定された複数の走行可能領域中央軌跡を説明するための説明図である。
【図7】推定走行位置算出処理においてパターンマッチ基準点を設定する様子を説明するための説明図である。
【図8】最新のパターンマッチ基準点を起点として、走行軌跡から推定走行位置を設定する様子を説明するための説明図である。
【図9】現在位置候補更新処理において現在位置候補を更新する様子を説明するための説明図である。
【図10】現在位置候補評価処理における評価方法を説明するための説明図である。
【図11】従来技術を説明するための説明図である。
【図12】従来技術を説明するための説明図である。
【符号の説明】
【0076】
20…ナビゲーション装置、21…位置検出部、22…GPS信号受信部、23…ジャイロスコープ、24…距離センサ、25…無線通信部、26…リモコンセンサ、27…リモコン、28…操作スイッチ群、29…地図データ入力部、30…表示部、31…音声出力部、32…音声入力部、33…車内LAN通信部、39…制御部。
【特許請求の範囲】
【請求項1】
自車両の絶対位置を特定可能な情報である絶対位置情報を取得する絶対位置情報取得手段と、
道路リンク及び道路の幅員の情報を取得する道路データ取得手段と、
前記道路データ取得手段から取得される道路リンク及び前記幅員の情報に基づき、道路リンク毎に自車両の走行可能領域を算出し、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する走行可能領域中央軌跡算出手段と、
前記絶対位置情報取得手段により取得された前記絶対位置情報に基づき自車両の推定走行位置を特定する推定走行位置特定手段と、
前記推定走行位置特定手段により前記推定走行位置が特定されると、その特定された推定走行位置と、前記走行可能領域中央軌跡算出手段によって算出された前記走行可能領域中央軌跡との間の距離に基づいて前記走行可能領域中央軌跡に対応する前記道路リンクの評価を行う評価手段と、
前記評価手段による前記道路リンクの評価に基づき、自車両が現在走行している可能性の高い道路リンクを選択し、その選択した道路リンク上の位置に自車両の現在位置を決定する現在位置決定手段と、
を備えることを特徴とする現在位置算出装置。
【請求項2】
請求項1に記載に現在位置算出装置において、
自車両の相対的な移動情報を取得する相対移動情報取得手段をさらに備え、
前記推定走行位置特定手段は、前記絶対位置情報に替えて前記相対移動情報取得手段により取得された前記移動情報に基づき自車両の推定走行位置を特定すること、
を特徴とする現在位置算出装置。
【請求項3】
自車両の絶対位置を特定可能な情報である絶対位置情報を取得する絶対位置情報取得手段と、
自車両の相対的な移動情報を取得する相対移動情報取得手段と、
道路リンク及び道路の幅員の情報を取得する道路データ取得手段と、
前記絶対位置情報取得手段により取得される前記絶対位置情報に基づき、前記道路データ取得手段により取得される道路リンクの中から自車両が走行している可能性のある道路リンクを少なくとも一つ抽出し、抽出した各々の道路リンク上に現在位置の候補となる現在位置候補を設定する現在位置候補設定手段と、
設定されている前記現在位置候補の位置する道路リンクを起点として、そこから自車両が走行可能な道路リンク列を前記現在位置候補毎に少なくとも一つ、前記道路データ取得手段から取得される道路リンクに基づいて特定する道路リンク列特定手段と、
前記道路リンク列特定手段により前記道路リンク列が特定されると、前記道路リンク列毎に、前記道路データ取得手段により取得される前記幅員の情報に基づいて自車両の走行可能領域を算出するとともに、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する走行可能領域中央軌跡算出手段と、
前記相対移動情報取得手段により取得される前記移動情報に基づき、設定されている前記現在位置候補の位置をそれぞれ更新する現在位置候補更新手段と、
前記絶対位置情報取得手段により取得された前記絶対位置情報に基づき自車両の推定走行位置を特定する推定走行位置特定手段と、
前記推定走行位置特定手段により前記推定走行位置が特定されると、その特定された推定走行位置と、前記走行可能領域中央軌跡算出手段により算出されている前記各走行可能領域中央軌跡とに基づいて前記各走行可能領域中央軌跡に対応する前記道路リンク列上に存在する前記現在位置候補の評価を行う評価手段と、
前記評価手段により前記各現在位置候補の評価が行われると、相対的に評価の高い前記現在位置候補を一つ選択し、その選択した前記現在位置候補を、道路リンク上の自車両の現在位置として決定する現在位置決定手段と、
を備えることを特徴とする現在位置算出装置。
【請求項4】
請求項3に記載の現在位置算出装置において、
前記道路リンク列特定手段は、前記起点より、所定の長さ、又は、所定のリンク数に達するまで道路リンクをたどって前記道路リンク列を特定すること、
を特徴とする現在位置算出装置。
【請求項5】
請求項3又は4に記載の現在位置算出装置において、
前記道路リンク列特定手段は、前記起点から直進方向に連なる道路リンクを優先して前記道路リンク列を特定すること、
を特徴とする現在位置算出装置。
【請求項6】
請求項3又は請求項4に記載の現在位置算出装置において、
さらに、案内経路に関する情報である案内経路情報を取得する案内経路情報取得手段を備え、
前記道路リンク列特定手段は、前記案内経路情報取得手段により取得される前記案内経路情報に基づいて特定される案内経路に沿う道路リンク列を優先して特定すること、
を特徴とする現在位置算出装置。
【請求項7】
請求項3〜請求項6のいずれかに記載の現在位置算出装置において、
さらに、前記移動情報取得手段により取得された前記移動情報に基づいて過去の自車両の移動軌跡を算出する移動軌跡算出手段を備え、
前記推定走行位置特定手段は、前記絶対位置情報取得手段により取得された前記絶対位置情報に基づいて自車両の推定走行位置を特定することに替えて、前記走行可能領域中央軌跡算出手段により算出された前記走行可能領域中央軌跡のうち、前記移動軌跡算出手段により算出された前記移動軌跡と最も一致性が高いと判断される前記走行可能領域中央軌跡を所定のタイミング毎に選択するとともに、選択した前記走行可能領域中央軌跡上にパターンマッチ基準点を設定し、以降、前記移動軌跡算出手段により算出された前記移動軌跡の起点を前記パターンマッチ基準点とすることによって前記移動軌跡より求まる位置を推定走行位置として特定すること、
を特徴とする現在位置算出装置。
【請求項8】
請求項7に記載の現在位置算出装置において、
前記現在位置候補更新手段は、前記推定走行位置から前記走行可能領域中央軌跡への最近傍点を道路面上対応点として決定し、その決定した道路面上対応点に対応する道路リンク上の位置を、更新後の現在位置候補とすること、
を特徴とする現在位置算出装置。
【請求項9】
請求項3〜請求項8のいずれかに記載の現在位置算出装置において、
前記評価手段は、前記推定走行位置特定手段により特定された前記推定走行位置と、前記走行可能領域中央軌跡算出手段により算出されている前記各走行可能領域との間の距離に基づき、前記評価を行うこと、
を特徴とする現在位置算出装置。
【請求項10】
請求項3〜請求項9のいずれかに記載の現在位置算出装置において
前記評価手段により前記各現在位置候補の評価が行われると、相対的に評価の低い前記現在位置候補を選択し、その選択した前記現在位置候補を処理対象から削除する現在位置候補削除手段をさらに備えること、
を特徴とする現在位置算出装置。
【請求項11】
コンピュータを、請求項1〜請求項10のいずれかに記載の現在位置算出装置における前記各手段として機能させるためのプログラム。
【請求項1】
自車両の絶対位置を特定可能な情報である絶対位置情報を取得する絶対位置情報取得手段と、
道路リンク及び道路の幅員の情報を取得する道路データ取得手段と、
前記道路データ取得手段から取得される道路リンク及び前記幅員の情報に基づき、道路リンク毎に自車両の走行可能領域を算出し、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する走行可能領域中央軌跡算出手段と、
前記絶対位置情報取得手段により取得された前記絶対位置情報に基づき自車両の推定走行位置を特定する推定走行位置特定手段と、
前記推定走行位置特定手段により前記推定走行位置が特定されると、その特定された推定走行位置と、前記走行可能領域中央軌跡算出手段によって算出された前記走行可能領域中央軌跡との間の距離に基づいて前記走行可能領域中央軌跡に対応する前記道路リンクの評価を行う評価手段と、
前記評価手段による前記道路リンクの評価に基づき、自車両が現在走行している可能性の高い道路リンクを選択し、その選択した道路リンク上の位置に自車両の現在位置を決定する現在位置決定手段と、
を備えることを特徴とする現在位置算出装置。
【請求項2】
請求項1に記載に現在位置算出装置において、
自車両の相対的な移動情報を取得する相対移動情報取得手段をさらに備え、
前記推定走行位置特定手段は、前記絶対位置情報に替えて前記相対移動情報取得手段により取得された前記移動情報に基づき自車両の推定走行位置を特定すること、
を特徴とする現在位置算出装置。
【請求項3】
自車両の絶対位置を特定可能な情報である絶対位置情報を取得する絶対位置情報取得手段と、
自車両の相対的な移動情報を取得する相対移動情報取得手段と、
道路リンク及び道路の幅員の情報を取得する道路データ取得手段と、
前記絶対位置情報取得手段により取得される前記絶対位置情報に基づき、前記道路データ取得手段により取得される道路リンクの中から自車両が走行している可能性のある道路リンクを少なくとも一つ抽出し、抽出した各々の道路リンク上に現在位置の候補となる現在位置候補を設定する現在位置候補設定手段と、
設定されている前記現在位置候補の位置する道路リンクを起点として、そこから自車両が走行可能な道路リンク列を前記現在位置候補毎に少なくとも一つ、前記道路データ取得手段から取得される道路リンクに基づいて特定する道路リンク列特定手段と、
前記道路リンク列特定手段により前記道路リンク列が特定されると、前記道路リンク列毎に、前記道路データ取得手段により取得される前記幅員の情報に基づいて自車両の走行可能領域を算出するとともに、その算出した走行可能領域の中央部を示す走行可能領域中央軌跡を算出する走行可能領域中央軌跡算出手段と、
前記相対移動情報取得手段により取得される前記移動情報に基づき、設定されている前記現在位置候補の位置をそれぞれ更新する現在位置候補更新手段と、
前記絶対位置情報取得手段により取得された前記絶対位置情報に基づき自車両の推定走行位置を特定する推定走行位置特定手段と、
前記推定走行位置特定手段により前記推定走行位置が特定されると、その特定された推定走行位置と、前記走行可能領域中央軌跡算出手段により算出されている前記各走行可能領域中央軌跡とに基づいて前記各走行可能領域中央軌跡に対応する前記道路リンク列上に存在する前記現在位置候補の評価を行う評価手段と、
前記評価手段により前記各現在位置候補の評価が行われると、相対的に評価の高い前記現在位置候補を一つ選択し、その選択した前記現在位置候補を、道路リンク上の自車両の現在位置として決定する現在位置決定手段と、
を備えることを特徴とする現在位置算出装置。
【請求項4】
請求項3に記載の現在位置算出装置において、
前記道路リンク列特定手段は、前記起点より、所定の長さ、又は、所定のリンク数に達するまで道路リンクをたどって前記道路リンク列を特定すること、
を特徴とする現在位置算出装置。
【請求項5】
請求項3又は4に記載の現在位置算出装置において、
前記道路リンク列特定手段は、前記起点から直進方向に連なる道路リンクを優先して前記道路リンク列を特定すること、
を特徴とする現在位置算出装置。
【請求項6】
請求項3又は請求項4に記載の現在位置算出装置において、
さらに、案内経路に関する情報である案内経路情報を取得する案内経路情報取得手段を備え、
前記道路リンク列特定手段は、前記案内経路情報取得手段により取得される前記案内経路情報に基づいて特定される案内経路に沿う道路リンク列を優先して特定すること、
を特徴とする現在位置算出装置。
【請求項7】
請求項3〜請求項6のいずれかに記載の現在位置算出装置において、
さらに、前記移動情報取得手段により取得された前記移動情報に基づいて過去の自車両の移動軌跡を算出する移動軌跡算出手段を備え、
前記推定走行位置特定手段は、前記絶対位置情報取得手段により取得された前記絶対位置情報に基づいて自車両の推定走行位置を特定することに替えて、前記走行可能領域中央軌跡算出手段により算出された前記走行可能領域中央軌跡のうち、前記移動軌跡算出手段により算出された前記移動軌跡と最も一致性が高いと判断される前記走行可能領域中央軌跡を所定のタイミング毎に選択するとともに、選択した前記走行可能領域中央軌跡上にパターンマッチ基準点を設定し、以降、前記移動軌跡算出手段により算出された前記移動軌跡の起点を前記パターンマッチ基準点とすることによって前記移動軌跡より求まる位置を推定走行位置として特定すること、
を特徴とする現在位置算出装置。
【請求項8】
請求項7に記載の現在位置算出装置において、
前記現在位置候補更新手段は、前記推定走行位置から前記走行可能領域中央軌跡への最近傍点を道路面上対応点として決定し、その決定した道路面上対応点に対応する道路リンク上の位置を、更新後の現在位置候補とすること、
を特徴とする現在位置算出装置。
【請求項9】
請求項3〜請求項8のいずれかに記載の現在位置算出装置において、
前記評価手段は、前記推定走行位置特定手段により特定された前記推定走行位置と、前記走行可能領域中央軌跡算出手段により算出されている前記各走行可能領域との間の距離に基づき、前記評価を行うこと、
を特徴とする現在位置算出装置。
【請求項10】
請求項3〜請求項9のいずれかに記載の現在位置算出装置において
前記評価手段により前記各現在位置候補の評価が行われると、相対的に評価の低い前記現在位置候補を選択し、その選択した前記現在位置候補を処理対象から削除する現在位置候補削除手段をさらに備えること、
を特徴とする現在位置算出装置。
【請求項11】
コンピュータを、請求項1〜請求項10のいずれかに記載の現在位置算出装置における前記各手段として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−276224(P2009−276224A)
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願番号】特願2008−128294(P2008−128294)
【出願日】平成20年5月15日(2008.5.15)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願日】平成20年5月15日(2008.5.15)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]