
現在位置算出装置
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電波航法によって現在位置を算出する技術に関するものである。
【背景技術】
【0002】
受信電波を利用する電波航法によって現在位置の測位を行う現在位置算出装置としては、従来より、GPS衛星による衛星測位によって現在位置の算出を行う現在位置算出装置が知られている。
また、このような現在位置算出装置における現在位置算出の技術としては、移動体に搭載される現在位置算出装置において、衛星測位による計測が行えた場合には、当該衛星測位によって計測した位置と、前回現在位置として決定した位置に前回以降の移動体の移動量を加えた位置との加重平均位置を今回の現在位置として決定し、衛星測位による計測が行えなかった場合には、前回現在位置として決定した位置に前回以降の移動体の後の移動量を加えた位置を今回の現在位置として決定する技術が知られている(たとえば、特許文献1)。
【0003】
また、現在位置算出装置における現在位置算出の技術としては、移動体に搭載される現在位置算出装置において、前回現在位置として決定した位置に前回計測した移動体の移動速度より求なる移動量を加えた位置を予測位置とし、予測位置周辺に設定した誤差範囲内に、今回衛星測位によって計測した位置が存在しない場合には、予測位置を今回の現在位置として決定し、誤差範囲内に今回衛星測位によって計測した位置が存在する場合には、前回現在位置として決定した位置に、前回衛星測位によって計測した位置と今回衛星測位によって計測した位置との差分を加えた位置を、今回の現在位置として決定する技術も知られている(たとえば、特許文献2)。
【特許文献1】特開平3-181815号公報
【特許文献2】特開平8-313278号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
さて、特許文献2の現在位置算出装置に、衛星測位による計測が行えなかったときの処理として特許文献1の現在位置算出装置の技術を適用すると、衛星測位による計測が行えなかった期間の現在位置は、衛星測位による計測が行えなくなる前に最後に衛星測位による計測が行えたときに決定した現在位置に、それ以降の移動体の移動量を加えた位置として決定されることになる。
【0005】
また、前回まで衛星測位による計測が行なえず、今回衛星測位による計測が行えたときの、今回の現在位置は以下のように決定されることになる。すなわち、衛星測位による計測が行えなくなる前に最後に衛星測位によって計測が行えたときに決定した現在位置に、それ以降の移動体の移動量を加えた位置を予測位置とし、予測位置周辺に設定した誤差範囲内に、今回衛星測位によって計測した位置が存在しない場合には、予測位置を今回の現在位置として決定し、誤差範囲内に今回衛星測位によって計測した位置が存在する場合には、衛星測位による計測が行えなくなる前に最後に衛星測位による計測がおこなえたときに決定した現在位置に、今回衛星測位によって計測した位置と当該最後に衛星測位によって計測した位置との差分を加えた位置を今回の現在位置として決定する。
【0006】
ここで、現在位置算出装置は、移動体の移動量を直接計測する手段を持たず、各期間における移動体の移動量は、特許文献2の技術と同様に、最後に衛星測位による計測が行えたときに衛星測位によって得られる移動体の移動速度より算出するものとする。
しかし、このようにすると、衛星測位による計測が行えない期間が比較的長期間に渡った場合などには、当該期間中の移動体の移動量が、衛星測位による計測が行えなくなる前に最後に衛星測位によって計測した移動体の移動速度より推定される移動量と大きく異なることがある。そして、この場合には、衛星測位による計測が行えない期間の経過後に、衛星測位によって計測された位置が正しい位置であっても、この正しい位置を現在位置として決定することができなくなる、または、衛星測位による計測が行えない期間の経過後に正しい位置を現在位置として決定できるようになるまで長時間を要してしまうという問題が生じる。
【0007】
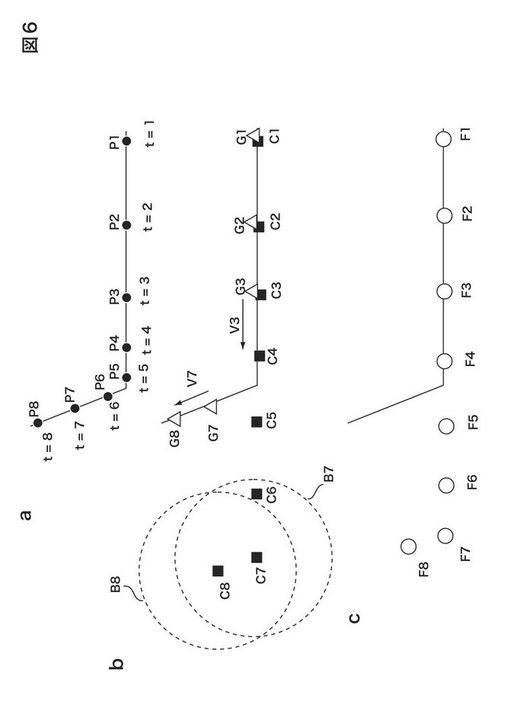
すなわち、たとえば、図6aに示すように移動体の現実の位置がt=1からt=8の期間にP1からP8に示すように移動したものとする。
そして、図6bに示すように、t=1からt=3の期間に、衛星測位によって衛星測位位置G1からG3が計測された後、t=4からt=6の衛星測位による計測が行えない期間が発生し、その後、t=7、t=8の期間に、衛星測位によって衛星測位位置G7、G8が計測されたものとする。また、t=1からt=3の期間に予測位置C1からC3が算出され、t=1において図6bの測位位置G1と予測位置C1とから図6cのF1の位置が現在位置として決定され、t=2において図6bの測位位置G2と予測位置C2とから図6cのF2の位置が現在位置として決定され、t=3において図6bの測位位置G3と予測位置C3とから図6cのF3の位置が現在位置として決定されたものとする。
【0008】
そして、この場合、衛星測位による計測が行えないt=4からt=6の期間には、最後に衛星測位によって計測が行えたt=3の時点で決定された図6cの現在位置F3と、当該t=3の時点で衛星測位によって計測された図6の移動速度V3より算出される各時点の予測位置C4からC6が図6cのF4からF6のように現在位置として決定される。
【0009】
また、t=7の衛星測位により位置の計測が復帰した時点では、t=3の時点で決定された図6cの現在位置F3と、当該t=3の時点で衛星測位によって計測された図6bの移動速度V3より、図6bの予測位置C7が算出され、その周辺に誤差範囲B7が設定される。
【0010】
図6a、図6bより理解されるように、このt=7の時点では、衛星測位によって計測が行えないt=4からt=6の期間に移動体の移動方向や速度が変化しているために、予測位置C7は、図6aに示す正しい現在位置P7から比較的大きく離れたものとなっている。そして、このために、図6bに示すt=7の時点で衛星測位によって計測された衛星測位位置G7が正しく現在位置P7を示すものであっても誤差範囲B7の外の位置となってしまい、図6cに示すように、正しい現在位置P7から離れた予測位置C7の位置がt=7の時点の現在位置F7として決定されてしまう。
【0011】
そして、次の時点t=8でも、正しい現在位置P8から離れた予測位置C7に基づく現在位置F7から図6bの予測位置C8が算出されるために、図6a、bに示すように、衛星測位によって計測された衛星測位位置G8が正しく現在位置P8を示すものであっても、やはり、予測位置C8周辺に設定される誤差範囲B8の外の位置となってしまい、図6cに示すように、正しい現在位置P8から離れた予測位置C8の位置がt=8の時点の現在位置F8として決定されてしまうことになる。
【0012】
そこで、本発明は、受信電波を利用する電波航法による計測が行えなかった期間の経過後に、より適正に現在位置を算出することのできる現在位置算出装置を提供することを課題とする。
【課題を解決するための手段】
【0013】
前記課題達成のために、移動体の現在位置を算出する現在位置算出装置を、受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とを含めて構成すると共に、前記現在位置算出部に、今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを備えたものである。
【0014】
このような現在位置算出装置によれば、電波航法部が前回測位データを計測してから今回までの間の期間の移動量を、その期間の直前に計測した移動速度と移動方向とのみよって推定するのではなく、当該期間の前後において計測した移動速度と移動方向とより推定する。したがって、当該期間中に移動体の移動速度や移動方向が変化した場合でも、より適切に当該期間中の移動速度と移動方向の推定が行える蓋然性が向上する。したがって、電波航法部が測位データを計測できないために、電波航法部が測位データを計測しない期間が比較的長期間に渡った場合でも、その期間の経過後に、より現実の現在位置に近い位置に予測位置を算出し、算出した予測位置やその周辺に設定した予測範囲を用いて、より適正に現在位置を算出することができる確率が向上する。
【0015】
また、前記課題達成のために、本発明は、移動体の現在位置を算出する現在位置算出装置を、受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とより構成し、前記現在位置算出部に、前記電波航法部が測位データを計測できなかった期間の経過直後の回において、今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを備えたものである。
【0016】
このような現在位置算出装置によれば、電波航法部が測位データを計測できなかった期間中の移動量を、その期間の直前に計測した移動速度と移動方向とのみよって推定するのではなく、当該期間の前後において計測した移動速度と移動方向とより推定する。したがって、電波航法部が測位データを計測できなかった期間中に移動体の移動速度や移動方向が変化した場合でも、より適切に当該期間中の移動速度と移動方向の推定が行える蓋然性が向上し、この結果、より現実の現在位置に近い位置に予測位置を算出し、算出した予測位置やその周辺に設定した予測範囲を用いて、より適正に現在位置を算出することができる確率が向上する。
【0017】
ここで、以上の現在位置算出装置は、たとえば、今回前記電波航法部が計測した測位データが表す移動方向と過去に前記電波航法部が計測した測位データが表す移動方向との平均によって求まる方向に、今回前記電波航法部が計測した測位データが表す移動速度と過去に前記電波航法部が計測した測位データが表す移動速度との平均によって求まる速度で、前記電波航法部が過去最後に測位データを計測してから今回までの経過時間分移動した場合に得られる移動量を、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量として推定するようにしてよい。
このようにすることにより、比較的、実際の移動量に近い移動量を推定することができる蓋然性を高めることができる。
【0018】
また、以上の現在位置算出装置は、前記予測手段において、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする所定の大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする所定の大きさの範囲となるように前記予測範囲を設定するよう構成してもよい。
また、前記電波航法部が測位データを計測できなかった期間の経過直後の回において予測範囲を設定する場合には、前記予測手段において、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする、前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする、記前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となるように前記予測範囲を設定するようにしてもよい。これらのようにすることにより、移動体が存在する可能性の高い範囲のみを適切に含むように予測範囲を設定することができる。
【0019】
また、以上の現在位置算出装置は、前記現在位置決定手段において、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれている場合に、今回前記電波航法部が計測した測位データが表す位置を今回算出する現在位置として決定し、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれていない場合に、前記予測位置を今回算出する現在位置として決定するように構成してもよい。
【0020】
なお、以上の現在位置算出装置において、前記移動体は自動車であってよく、前記電波航法部は衛星測位によって前記測位データを計測するものであってよい。また、以上の現在位置算出装置と、当該現在位置算出装置が算出した現在位置と地図とのマップマッチングによって算出した現在位置を、地図を表す地図画像表示に表示した案内画像を表示する現在位置表示部とを含めて、車載のナビゲーション装置を構成するようにしてもよい。
【発明の効果】
【0021】
以上のように本発明によれば、受信電波を利用する電波航法による計測が行えなかった期間の経過後に、より適正に現在位置を算出することのできる現在位置算出装置を提供することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施形態について、車載のナビゲーション装置への適用を例にとり説明する。
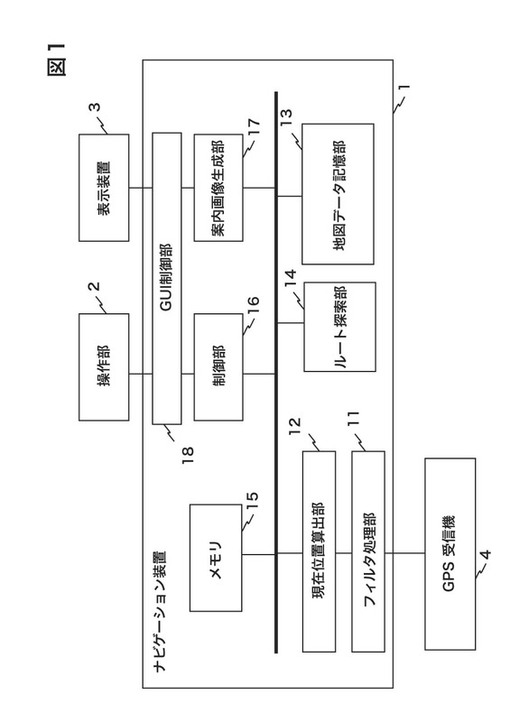
図1に本実施形態に係るナビゲーション装置の構成を示す。
図示するように、ナビゲーション装置は、制御装置1、操作部2、表示装置3、GPS受信機4を備えている。そして、制御装置1は、フィルタ処理部11、現在位置算出部12、道路地図データを記憶したDVDドライブやHDDなどの記憶装置である地図データ記憶部13、ルート探索部14、メモリ15、制御部16、案内画像生成部17、制御装置1とユーザ間のGUIを制御するGUI制御部18を備えている。
【0023】
このような構成において、GPS受信機4は、衛星測位により測位した現在位置である測位位置や、現在の移動速度や、現在の移動方向を計測する。また、フィルタ処理部11は、GPS受信機4が計測した測位位置を後述するフィルタ処理により補正し現在位置を出力する。そして、現在位置算出部12は、フィルタ処理が出力した現在位置に対して、地図データ記憶部13から読み出した地図データが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標や、現在の進行方向として最も確からしい方向を算定し、現在位置、進行方向としてメモリ15に設定する。
【0024】
そして、制御部16は、ユーザの目的地設定要求に応じて、ユーザから操作部2、GUI制御部18を介して目的地の設定を受付け、これをメモリ15にセットする。そして、目的地までの推奨ルートをルート探索部14に探索させる。ルート探索部14は、必要地理的範囲の道路ユニットのデータを地図データ記憶部13から読み出し、メモリ15に設定されている現在位置から目的地までの経路を、所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ15にセットする。ここで、制御部16は、メモリ15にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ15にセットされている目的地と推奨ルートをクリアする処理も行う。
【0025】
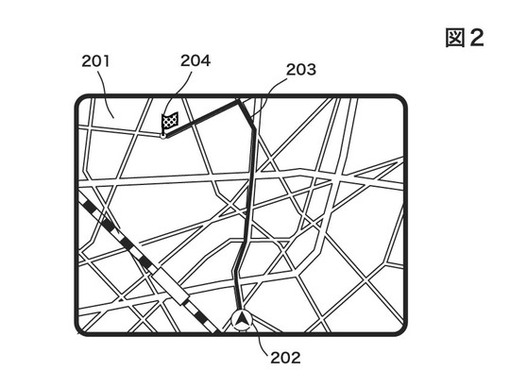
一方、案内画像生成部17は、たとえば、図2に示すように、地図データ記憶部13から読み出した地図データが示す地図を表す地図画像201上に、メモリ15にセットされている現在位置202や推奨ルート203や目的地204を表した案内画像を生成し、GUI制御部18を介して表示装置3に表示する処理などを行う。
【0026】
以下、前述したフィルタ処理部11が行うフィルタ処理について説明する。
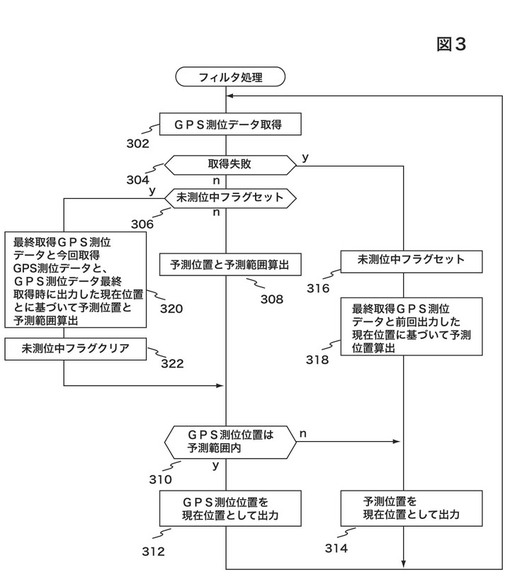
図3に、このフィルタ処理の手順を示す。
図示するようにフィルタ処理では、まず、GPS受信からGPS受信機4が計測した測位位置や現在の移動速度や現在の移動方向を測位データとして取得する(ステップ302)。そして、測位データが正常に取得できたかどうかを調べ(ステップ304)、正常に取得できていれば、次に未測位中フラグがセットされているかどうかを調べる(ステップ306)。ここで、未測位中フラグは、この時点において、前回GPS受信機4から測位データを正常に取得できなかった場合にはセットされた状態となっている。なお、マルチパスや障害物の発生などによってGPS受信機4が正常に計測を行えないときに、フィルタ処理は、GPS受信機4から正常に測位データを取得することができなくなる。
【0027】
そして、未測位中フラグがセットされていなければ、予測位置と予測範囲を算出する(ステップ308)。このステップ308における予測位置の算出は、たとえば、後述するステップ312または314で前回出力した現在位置から、前回GPS受信機4から取得した測位データが示す移動方向に、前回GPS受信機4から取得した測位データが示す移動速度で、前回測位データをGPS受信機4から取得してから現在までの経過時間分移動した位置を、予測位置として算出することにより行う。また、ステップ308における予測範囲の算出は、たとえば、算出した予測位置を中心とする所定半径の円内の領域を予測範囲として算出することにより行う。
【0028】
次に、予測位置と予測範囲を算出したならば、今回GPS受信機4から取得した測位データが示す測位位置が、予測範囲内に含まれるかどうかを調べ(ステップ310)、含まれている場合には、今回GPS受信機4から取得した測位データが示す測位位置を現在位置として出力し(ステップ312)、ステップ302に戻る。一方、今回GPS受信機4から取得した測位データが示す測位位置が、予測範囲内に含まれていない場合には、先に算出した予測位置を、現在位置として出力し(ステップ314)、ステップ302に戻る。
【0029】
さて、ステップ304に戻り、当該ステップ304において、GPS受信機4から正常に測位データが取得できなかった場合には、まず、未測位中フラグをセットする(ステップ316)、そして、ステップ312または314で前回出力した現在位置から、前回以前に最後にGPS受信機4から正常に取得した測位データが示す移動方向に、前回以前に最後にGPS受信機4から正常に取得した測位データが示す移動速度で、前回ステップ302でGPS受信機4からの測位データの取得を試みてから現在までの経過時間分移動した位置を、予測位置として算出する(ステップ318)。そして、算出した予測位置を、現在位置として出力し(ステップ314)、ステップ302に戻る。
【0030】
次にステップ308に戻り、当該ステップ308において未測位中フラグがセットされていると判定された場合には、前回以前に最後にGPS受信機4から正常に取得した測位データと今回GPS受信機4から取得した測位データと、前回以前に最後にGPS受信機4から正常に測位データを取得した回にステップ312または314で出力した現在位置とに基づいて予測位置と予測範囲を算出する(ステップ320)。
【0031】
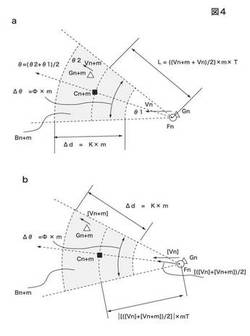
ここで、このステップ320の予測位置と予測範囲の算出は、次のように行う。
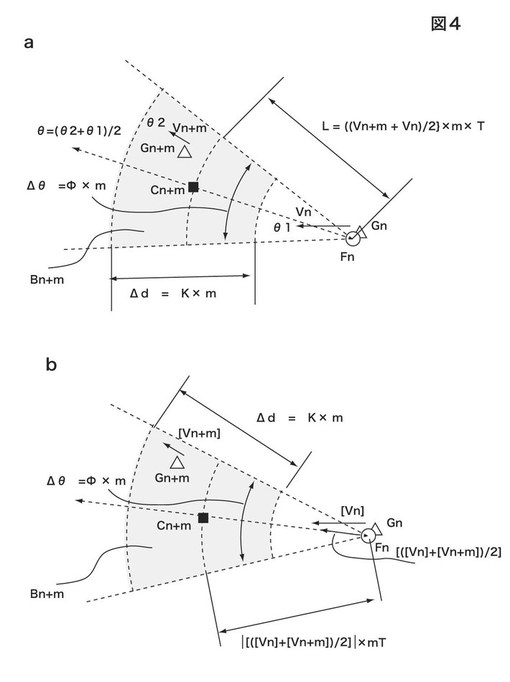
いま、図4aに示すように、前回以前に最後にGPS受信機4から測位データを取得した回nにステップ312または314で出力した現在位置がFnであるとする。また、その回nに、GPS受信機4から取得した測位データが示す測位位置がGn、移動速度がVn、移動方向がθ1であるとする。そして、今回n+mに、GPS受信機4から取得した測位データが示す測位位置がGn+m、移動速度がVn+m、移動方向がθ2であるとする。
【0032】
この場合、今回の予測位置Cn+mは、図示するように、回nに出力した現在位置Fnから、回nの移動方向θ1と今回n+mの移動方向θ2の平均として求まる方向(θ1+θ2)/2に、回nの移動速度Vnと今回n+mの移動速度Vn+mの平均として求まる速度{(Vn) + (Vn+m)}/2で、回nから今回までの経過時間(たとえば、各回のインターバルがTであるとすればm×T)進んだ位置を今回の予測位置Cn+mとすることにより求める。すなわち、回n移動方向と今回n+mの移動方向との平均である方向に、回nの移動速度と今回n+mの移動速度との平均である速度で、車両が回nから今回n+mまでの間移動したものとして、今回の予測位置Cn+mを求める。
【0033】
また、今回の予測範囲Bn+mは、回nに出力した現在位置Fnからの距離の範囲が、回nに出力した現在位置Fnから予測位置Cn+mまでの距離をLとしてL+Δd/2からL-(Δd/2)の範囲となり、回nに出力した現在位置Fnから見た方向の範囲が、回nに出力した現在位置Fnから見た予測位置Cn+mの方向をθとして、θ+(Δθ/2)からθ-(Δθ/2)となる範囲とする。ここで、Δdは、固定値としてもよいが、回nから今回までの経過時間が大きくなるほど大きくなるように設定することが好ましい。また、Δθも、固定値としてもよいが、回nから今回までの経過時間が大きくなるほど大きくなるように設定することが好ましい。たとえば、各回のインターバルが固定であれば、KとΦを固定値として、Δd=K×m、Δθ=Φ×mなどによってΔd、Δθを求めるなどしてよい。
【0034】
さて、図3に戻り、以上のようにして予測位置と予測範囲を算出したならば、未測位中フラグをクリアし(ステップ322)、今回GPS受信機4から取得した測位データが示す測位位置が、予測範囲内に含まれるかどうかを調べ(ステップ310)、含まれている場合には、今回GPS受信機4から取得した測位データが示す測位位置を現在位置として出力し(ステップ312)、ステップ302に戻る。一方、今回GPS受信機4から取得した測位データが示す現在位置が、予測範囲内に含まれていない場合には、先に算出した予測位置を、現在位置として出力し(ステップ314)、ステップ302に戻る。
【0035】
以上、フィルタ処理が行うフィルタ処理について説明した。
ここで、このようなフィルタ処理の処理例を図5に示す。
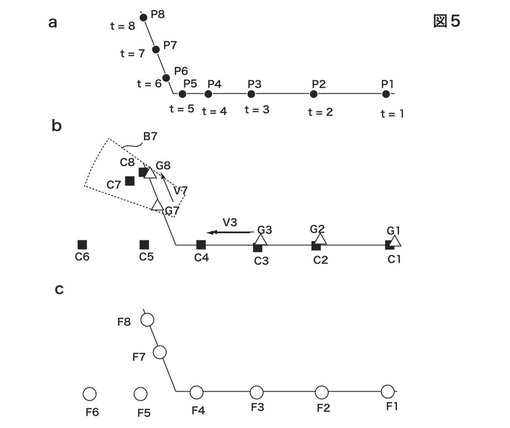
いま、図5aに示すように、先の図6aの場合と同様に、自車両の現実の位置がt=1からt=8の期間にP1からP8に示すように移動したものとする。
そして、図5bに示すように、t=1からt=3の期間に、GPS受信機4から取得した測位データが表す測位位置がG1からG3と変化した後、t=4からt=6のGPS受信機4が衛星測位を行えないために測位データを取得できない期間が発生し、その後、t=7、t=8の期間に、GPS受信機4から取得した測位データが表す測位位置がG7、G8と変化したものとする。また、t=1からt=3の期間に予測位置C1からC3が算出され、t=1において図5bの測位位置G1と予測位置C1とから図5cのF1の位置が現在位置として出力され、t=2において図5bの測位位置G2と予測位置C2とから図5cのF2の位置が現在位置として出力され、t=3において図5bの測位位置G3と予測位置C3とから図5cのF3の位置が現在位置として出力されたものとする。
【0036】
そして、この場合、衛星測位によって位置が計測できないt=4からt=6の期間には、最後にGPS受信機4から正常に測位データを取得できたt=3の時点で決定された図5cの現在位置F3と、当該t=3の時点でGPS受信機4から取得した測位データが示す図5の移動速度V3より算出される各時点の予測位置C4からC6が図5cのF4からF6のように現在位置として決定される。
【0037】
また、t=7のGPS受信機4からの測位データの取得が正常に行えるように復帰した時点では、t=3の時点で決定された図5cの現在位置F3と、当該t=3の時点でGPS受信機4から取得した測位データが示す図5bの移動速度V3と、t=7の時点でGPS受信機4から取得した測位データが示す図5bの移動速度V7とより、図5bの予測位置C7が算出され、その周辺に予測範囲B7が設定される。
【0038】
ここで、図5a、bより理解されるように、このt=7の時点では、予測位置C7を、t=3の時点の移動速度、移動方向と、t=7の時点の移動速度、移動方向をより推定される、t=4からt=6の期間の自車両の移動量に基づいて算出するので、t=4からt=6の期間に自車両の移動方向や速度が変化していても、予測位置C7として、図5aに示す正しい現在位置P7に比較的近い位置を算出することができる。すなわち、本フィルタ処理によれば、GPS受信機4が衛星測位を行えないために測位データを取得できない期間の自車両の移動速度と移動方向を、その期間の直前における自車両の移動速度と移動方向とのみよって推定するのではなく、当該期間の前後における自車両の移動速度と移動方向とより推定する。したがって、より適切にGPS受信機4が衛星測位を行えないために測位データを取得できない期間の自車両の移動速度と移動方向の推定が行え、この結果、より現実の現在位置に近い位置に予測位置を算出することができるようになる。
【0039】
さて、このように、予測位置C7として、図5aに示す正しい現在位置P7に比較的近い位置に算出されるので、図5bに示すt=7の時点の測位位置G7が比較的正しく現在位置P7を示すものであれば、この測位位置G7は予測範囲B7内となり、図5cに示すように、この測位位置G7を、t=7の時点の現在位置F7として出力することができるようになる。
【0040】
以上、本発明の実施形態について説明した。
ところで、以上に説明したフィルタ処理のステップ320における予測位置の算出は、図4bに示すように行っても良い。
すなわち、図4bに示すように、前回以前に最後にGPS受信機4から測位データを取得した回nにステップ312または314で出力した現在位置がFnであるとする。また、その回nに、GPS受信機4から取得した測位データが示す測位位置がGn、移動速度がVn、移動方向がθ1であるとする。そして、方向θ1、大きさVnを持ったベクトルを移動ベクトル[Vn]とする。そして、今回n+mに、GPS受信機4から取得した測位データが示す測位位置がGn+m、移動速度がVn+m、移動方向がθ2であるとする。そして、方向θ2、大きさVn+mを持ったベクトルを移動ベクトル[Vn+m]とする。
【0041】
この場合、今回の予測位置Cn+mは、図示するように、回nに出力した現在位置Fnから、移動ベクトル[Vn]と移動ベクトル[Vn+m]との平均ベクトルの方向に、平均ベクトルの大きさに回nから今回までの経過時間(たとえば、各回のインターバルがTであるとすればm×T)乗じた距離進んだ位置を今回の予測位置Cn+mとすることにより求める。すなわち、回n移動ベクトルと今回n+mの移動ベクトルとの平均ベクトルを移動ベクトルとして、車両が回nから今回n+mまでの間移動したものとして、今回の予測位置Cn+mを求める。
なお、この場合にも、予測範囲Bn+mは、算出した予測位置Cn+mに基づいて上述のように算出する。
【0042】
また、以上のフィルタ処理のステップ312では、GPS受信機4から取得した測位位置に代えて、今回GPS受信機4から取得した測位データが示す測位位置と、前回以前に最後にGPS受信機4から正常に取得した測位データが示す測位位置の差分を、前回以前に最後にGPS受信機4から測位データを正常に取得した回に出力した現在位置に加算した位置を現在位置として算出するようにしてもよい。または、以上のフィルタ処理のステップ312では、GPS受信機4から取得した測位位置に代えて、所定の手法によって算出した測位位置と予測位置の信頼性に応じた加重を用いた、当該測位位置と予測位置との加重平均によって求めた位置を現在位置として出力してもよい。
【0043】
また、以上のフィルタ処理のステップ308では、ステップ320と同様にして予測位置と予測範囲を算出するようにしてもよい。
また、以上のフィルタ処理のステップ304でGPS受信機4から正常に測位データを取得できなかったと判定された場合には、現在位置は不明として、その出力を行わないようにしてもよい。
また、以上の実施形態は、GPS受信機4に代えてGPS衛星ではない他の測位用衛星が送信する電波、または、地上局が送信する電波を用いた電波航法によって測位データの計測を行う受信機を備える場合にも、同様に適用することができる。
【図面の簡単な説明】
【0044】
【図1】本発明の実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】本発明の実施形態に係るナビゲーション装置の表示画面例を示すブロック図である。
【図3】本発明の実施形態に係るフィルタ処理を示すフローチャートである。
【図4】本発明の実施形態に係る予測位置と予測範囲の算出例を示す図である。
【図5】本発明の実施形態に係るフィルタ処理の処理例を示す図である。
【図6】従来の現在位置算出例を示す図である。
【符号の説明】
【0045】
1…制御装置、2…操作部、3…表示装置、4…GPS受信機、11…フィルタ処理部、12…現在位置算出部、13…地図データ記憶部、14…ルート探索部、15…メモリ、16…制御部、17…案内画像生成部、18…GUI制御部。
【技術分野】
【0001】
本発明は、電波航法によって現在位置を算出する技術に関するものである。
【背景技術】
【0002】
受信電波を利用する電波航法によって現在位置の測位を行う現在位置算出装置としては、従来より、GPS衛星による衛星測位によって現在位置の算出を行う現在位置算出装置が知られている。
また、このような現在位置算出装置における現在位置算出の技術としては、移動体に搭載される現在位置算出装置において、衛星測位による計測が行えた場合には、当該衛星測位によって計測した位置と、前回現在位置として決定した位置に前回以降の移動体の移動量を加えた位置との加重平均位置を今回の現在位置として決定し、衛星測位による計測が行えなかった場合には、前回現在位置として決定した位置に前回以降の移動体の後の移動量を加えた位置を今回の現在位置として決定する技術が知られている(たとえば、特許文献1)。
【0003】
また、現在位置算出装置における現在位置算出の技術としては、移動体に搭載される現在位置算出装置において、前回現在位置として決定した位置に前回計測した移動体の移動速度より求なる移動量を加えた位置を予測位置とし、予測位置周辺に設定した誤差範囲内に、今回衛星測位によって計測した位置が存在しない場合には、予測位置を今回の現在位置として決定し、誤差範囲内に今回衛星測位によって計測した位置が存在する場合には、前回現在位置として決定した位置に、前回衛星測位によって計測した位置と今回衛星測位によって計測した位置との差分を加えた位置を、今回の現在位置として決定する技術も知られている(たとえば、特許文献2)。
【特許文献1】特開平3-181815号公報
【特許文献2】特開平8-313278号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
さて、特許文献2の現在位置算出装置に、衛星測位による計測が行えなかったときの処理として特許文献1の現在位置算出装置の技術を適用すると、衛星測位による計測が行えなかった期間の現在位置は、衛星測位による計測が行えなくなる前に最後に衛星測位による計測が行えたときに決定した現在位置に、それ以降の移動体の移動量を加えた位置として決定されることになる。
【0005】
また、前回まで衛星測位による計測が行なえず、今回衛星測位による計測が行えたときの、今回の現在位置は以下のように決定されることになる。すなわち、衛星測位による計測が行えなくなる前に最後に衛星測位によって計測が行えたときに決定した現在位置に、それ以降の移動体の移動量を加えた位置を予測位置とし、予測位置周辺に設定した誤差範囲内に、今回衛星測位によって計測した位置が存在しない場合には、予測位置を今回の現在位置として決定し、誤差範囲内に今回衛星測位によって計測した位置が存在する場合には、衛星測位による計測が行えなくなる前に最後に衛星測位による計測がおこなえたときに決定した現在位置に、今回衛星測位によって計測した位置と当該最後に衛星測位によって計測した位置との差分を加えた位置を今回の現在位置として決定する。
【0006】
ここで、現在位置算出装置は、移動体の移動量を直接計測する手段を持たず、各期間における移動体の移動量は、特許文献2の技術と同様に、最後に衛星測位による計測が行えたときに衛星測位によって得られる移動体の移動速度より算出するものとする。
しかし、このようにすると、衛星測位による計測が行えない期間が比較的長期間に渡った場合などには、当該期間中の移動体の移動量が、衛星測位による計測が行えなくなる前に最後に衛星測位によって計測した移動体の移動速度より推定される移動量と大きく異なることがある。そして、この場合には、衛星測位による計測が行えない期間の経過後に、衛星測位によって計測された位置が正しい位置であっても、この正しい位置を現在位置として決定することができなくなる、または、衛星測位による計測が行えない期間の経過後に正しい位置を現在位置として決定できるようになるまで長時間を要してしまうという問題が生じる。
【0007】
すなわち、たとえば、図6aに示すように移動体の現実の位置がt=1からt=8の期間にP1からP8に示すように移動したものとする。
そして、図6bに示すように、t=1からt=3の期間に、衛星測位によって衛星測位位置G1からG3が計測された後、t=4からt=6の衛星測位による計測が行えない期間が発生し、その後、t=7、t=8の期間に、衛星測位によって衛星測位位置G7、G8が計測されたものとする。また、t=1からt=3の期間に予測位置C1からC3が算出され、t=1において図6bの測位位置G1と予測位置C1とから図6cのF1の位置が現在位置として決定され、t=2において図6bの測位位置G2と予測位置C2とから図6cのF2の位置が現在位置として決定され、t=3において図6bの測位位置G3と予測位置C3とから図6cのF3の位置が現在位置として決定されたものとする。
【0008】
そして、この場合、衛星測位による計測が行えないt=4からt=6の期間には、最後に衛星測位によって計測が行えたt=3の時点で決定された図6cの現在位置F3と、当該t=3の時点で衛星測位によって計測された図6の移動速度V3より算出される各時点の予測位置C4からC6が図6cのF4からF6のように現在位置として決定される。
【0009】
また、t=7の衛星測位により位置の計測が復帰した時点では、t=3の時点で決定された図6cの現在位置F3と、当該t=3の時点で衛星測位によって計測された図6bの移動速度V3より、図6bの予測位置C7が算出され、その周辺に誤差範囲B7が設定される。
【0010】
図6a、図6bより理解されるように、このt=7の時点では、衛星測位によって計測が行えないt=4からt=6の期間に移動体の移動方向や速度が変化しているために、予測位置C7は、図6aに示す正しい現在位置P7から比較的大きく離れたものとなっている。そして、このために、図6bに示すt=7の時点で衛星測位によって計測された衛星測位位置G7が正しく現在位置P7を示すものであっても誤差範囲B7の外の位置となってしまい、図6cに示すように、正しい現在位置P7から離れた予測位置C7の位置がt=7の時点の現在位置F7として決定されてしまう。
【0011】
そして、次の時点t=8でも、正しい現在位置P8から離れた予測位置C7に基づく現在位置F7から図6bの予測位置C8が算出されるために、図6a、bに示すように、衛星測位によって計測された衛星測位位置G8が正しく現在位置P8を示すものであっても、やはり、予測位置C8周辺に設定される誤差範囲B8の外の位置となってしまい、図6cに示すように、正しい現在位置P8から離れた予測位置C8の位置がt=8の時点の現在位置F8として決定されてしまうことになる。
【0012】
そこで、本発明は、受信電波を利用する電波航法による計測が行えなかった期間の経過後に、より適正に現在位置を算出することのできる現在位置算出装置を提供することを課題とする。
【課題を解決するための手段】
【0013】
前記課題達成のために、移動体の現在位置を算出する現在位置算出装置を、受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とを含めて構成すると共に、前記現在位置算出部に、今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを備えたものである。
【0014】
このような現在位置算出装置によれば、電波航法部が前回測位データを計測してから今回までの間の期間の移動量を、その期間の直前に計測した移動速度と移動方向とのみよって推定するのではなく、当該期間の前後において計測した移動速度と移動方向とより推定する。したがって、当該期間中に移動体の移動速度や移動方向が変化した場合でも、より適切に当該期間中の移動速度と移動方向の推定が行える蓋然性が向上する。したがって、電波航法部が測位データを計測できないために、電波航法部が測位データを計測しない期間が比較的長期間に渡った場合でも、その期間の経過後に、より現実の現在位置に近い位置に予測位置を算出し、算出した予測位置やその周辺に設定した予測範囲を用いて、より適正に現在位置を算出することができる確率が向上する。
【0015】
また、前記課題達成のために、本発明は、移動体の現在位置を算出する現在位置算出装置を、受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とより構成し、前記現在位置算出部に、前記電波航法部が測位データを計測できなかった期間の経過直後の回において、今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを備えたものである。
【0016】
このような現在位置算出装置によれば、電波航法部が測位データを計測できなかった期間中の移動量を、その期間の直前に計測した移動速度と移動方向とのみよって推定するのではなく、当該期間の前後において計測した移動速度と移動方向とより推定する。したがって、電波航法部が測位データを計測できなかった期間中に移動体の移動速度や移動方向が変化した場合でも、より適切に当該期間中の移動速度と移動方向の推定が行える蓋然性が向上し、この結果、より現実の現在位置に近い位置に予測位置を算出し、算出した予測位置やその周辺に設定した予測範囲を用いて、より適正に現在位置を算出することができる確率が向上する。
【0017】
ここで、以上の現在位置算出装置は、たとえば、今回前記電波航法部が計測した測位データが表す移動方向と過去に前記電波航法部が計測した測位データが表す移動方向との平均によって求まる方向に、今回前記電波航法部が計測した測位データが表す移動速度と過去に前記電波航法部が計測した測位データが表す移動速度との平均によって求まる速度で、前記電波航法部が過去最後に測位データを計測してから今回までの経過時間分移動した場合に得られる移動量を、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量として推定するようにしてよい。
このようにすることにより、比較的、実際の移動量に近い移動量を推定することができる蓋然性を高めることができる。
【0018】
また、以上の現在位置算出装置は、前記予測手段において、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする所定の大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする所定の大きさの範囲となるように前記予測範囲を設定するよう構成してもよい。
また、前記電波航法部が測位データを計測できなかった期間の経過直後の回において予測範囲を設定する場合には、前記予測手段において、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする、前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする、記前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となるように前記予測範囲を設定するようにしてもよい。これらのようにすることにより、移動体が存在する可能性の高い範囲のみを適切に含むように予測範囲を設定することができる。
【0019】
また、以上の現在位置算出装置は、前記現在位置決定手段において、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれている場合に、今回前記電波航法部が計測した測位データが表す位置を今回算出する現在位置として決定し、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれていない場合に、前記予測位置を今回算出する現在位置として決定するように構成してもよい。
【0020】
なお、以上の現在位置算出装置において、前記移動体は自動車であってよく、前記電波航法部は衛星測位によって前記測位データを計測するものであってよい。また、以上の現在位置算出装置と、当該現在位置算出装置が算出した現在位置と地図とのマップマッチングによって算出した現在位置を、地図を表す地図画像表示に表示した案内画像を表示する現在位置表示部とを含めて、車載のナビゲーション装置を構成するようにしてもよい。
【発明の効果】
【0021】
以上のように本発明によれば、受信電波を利用する電波航法による計測が行えなかった期間の経過後に、より適正に現在位置を算出することのできる現在位置算出装置を提供することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施形態について、車載のナビゲーション装置への適用を例にとり説明する。
図1に本実施形態に係るナビゲーション装置の構成を示す。
図示するように、ナビゲーション装置は、制御装置1、操作部2、表示装置3、GPS受信機4を備えている。そして、制御装置1は、フィルタ処理部11、現在位置算出部12、道路地図データを記憶したDVDドライブやHDDなどの記憶装置である地図データ記憶部13、ルート探索部14、メモリ15、制御部16、案内画像生成部17、制御装置1とユーザ間のGUIを制御するGUI制御部18を備えている。
【0023】
このような構成において、GPS受信機4は、衛星測位により測位した現在位置である測位位置や、現在の移動速度や、現在の移動方向を計測する。また、フィルタ処理部11は、GPS受信機4が計測した測位位置を後述するフィルタ処理により補正し現在位置を出力する。そして、現在位置算出部12は、フィルタ処理が出力した現在位置に対して、地図データ記憶部13から読み出した地図データが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標や、現在の進行方向として最も確からしい方向を算定し、現在位置、進行方向としてメモリ15に設定する。
【0024】
そして、制御部16は、ユーザの目的地設定要求に応じて、ユーザから操作部2、GUI制御部18を介して目的地の設定を受付け、これをメモリ15にセットする。そして、目的地までの推奨ルートをルート探索部14に探索させる。ルート探索部14は、必要地理的範囲の道路ユニットのデータを地図データ記憶部13から読み出し、メモリ15に設定されている現在位置から目的地までの経路を、所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ15にセットする。ここで、制御部16は、メモリ15にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ15にセットされている目的地と推奨ルートをクリアする処理も行う。
【0025】
一方、案内画像生成部17は、たとえば、図2に示すように、地図データ記憶部13から読み出した地図データが示す地図を表す地図画像201上に、メモリ15にセットされている現在位置202や推奨ルート203や目的地204を表した案内画像を生成し、GUI制御部18を介して表示装置3に表示する処理などを行う。
【0026】
以下、前述したフィルタ処理部11が行うフィルタ処理について説明する。
図3に、このフィルタ処理の手順を示す。
図示するようにフィルタ処理では、まず、GPS受信からGPS受信機4が計測した測位位置や現在の移動速度や現在の移動方向を測位データとして取得する(ステップ302)。そして、測位データが正常に取得できたかどうかを調べ(ステップ304)、正常に取得できていれば、次に未測位中フラグがセットされているかどうかを調べる(ステップ306)。ここで、未測位中フラグは、この時点において、前回GPS受信機4から測位データを正常に取得できなかった場合にはセットされた状態となっている。なお、マルチパスや障害物の発生などによってGPS受信機4が正常に計測を行えないときに、フィルタ処理は、GPS受信機4から正常に測位データを取得することができなくなる。
【0027】
そして、未測位中フラグがセットされていなければ、予測位置と予測範囲を算出する(ステップ308)。このステップ308における予測位置の算出は、たとえば、後述するステップ312または314で前回出力した現在位置から、前回GPS受信機4から取得した測位データが示す移動方向に、前回GPS受信機4から取得した測位データが示す移動速度で、前回測位データをGPS受信機4から取得してから現在までの経過時間分移動した位置を、予測位置として算出することにより行う。また、ステップ308における予測範囲の算出は、たとえば、算出した予測位置を中心とする所定半径の円内の領域を予測範囲として算出することにより行う。
【0028】
次に、予測位置と予測範囲を算出したならば、今回GPS受信機4から取得した測位データが示す測位位置が、予測範囲内に含まれるかどうかを調べ(ステップ310)、含まれている場合には、今回GPS受信機4から取得した測位データが示す測位位置を現在位置として出力し(ステップ312)、ステップ302に戻る。一方、今回GPS受信機4から取得した測位データが示す測位位置が、予測範囲内に含まれていない場合には、先に算出した予測位置を、現在位置として出力し(ステップ314)、ステップ302に戻る。
【0029】
さて、ステップ304に戻り、当該ステップ304において、GPS受信機4から正常に測位データが取得できなかった場合には、まず、未測位中フラグをセットする(ステップ316)、そして、ステップ312または314で前回出力した現在位置から、前回以前に最後にGPS受信機4から正常に取得した測位データが示す移動方向に、前回以前に最後にGPS受信機4から正常に取得した測位データが示す移動速度で、前回ステップ302でGPS受信機4からの測位データの取得を試みてから現在までの経過時間分移動した位置を、予測位置として算出する(ステップ318)。そして、算出した予測位置を、現在位置として出力し(ステップ314)、ステップ302に戻る。
【0030】
次にステップ308に戻り、当該ステップ308において未測位中フラグがセットされていると判定された場合には、前回以前に最後にGPS受信機4から正常に取得した測位データと今回GPS受信機4から取得した測位データと、前回以前に最後にGPS受信機4から正常に測位データを取得した回にステップ312または314で出力した現在位置とに基づいて予測位置と予測範囲を算出する(ステップ320)。
【0031】
ここで、このステップ320の予測位置と予測範囲の算出は、次のように行う。
いま、図4aに示すように、前回以前に最後にGPS受信機4から測位データを取得した回nにステップ312または314で出力した現在位置がFnであるとする。また、その回nに、GPS受信機4から取得した測位データが示す測位位置がGn、移動速度がVn、移動方向がθ1であるとする。そして、今回n+mに、GPS受信機4から取得した測位データが示す測位位置がGn+m、移動速度がVn+m、移動方向がθ2であるとする。
【0032】
この場合、今回の予測位置Cn+mは、図示するように、回nに出力した現在位置Fnから、回nの移動方向θ1と今回n+mの移動方向θ2の平均として求まる方向(θ1+θ2)/2に、回nの移動速度Vnと今回n+mの移動速度Vn+mの平均として求まる速度{(Vn) + (Vn+m)}/2で、回nから今回までの経過時間(たとえば、各回のインターバルがTであるとすればm×T)進んだ位置を今回の予測位置Cn+mとすることにより求める。すなわち、回n移動方向と今回n+mの移動方向との平均である方向に、回nの移動速度と今回n+mの移動速度との平均である速度で、車両が回nから今回n+mまでの間移動したものとして、今回の予測位置Cn+mを求める。
【0033】
また、今回の予測範囲Bn+mは、回nに出力した現在位置Fnからの距離の範囲が、回nに出力した現在位置Fnから予測位置Cn+mまでの距離をLとしてL+Δd/2からL-(Δd/2)の範囲となり、回nに出力した現在位置Fnから見た方向の範囲が、回nに出力した現在位置Fnから見た予測位置Cn+mの方向をθとして、θ+(Δθ/2)からθ-(Δθ/2)となる範囲とする。ここで、Δdは、固定値としてもよいが、回nから今回までの経過時間が大きくなるほど大きくなるように設定することが好ましい。また、Δθも、固定値としてもよいが、回nから今回までの経過時間が大きくなるほど大きくなるように設定することが好ましい。たとえば、各回のインターバルが固定であれば、KとΦを固定値として、Δd=K×m、Δθ=Φ×mなどによってΔd、Δθを求めるなどしてよい。
【0034】
さて、図3に戻り、以上のようにして予測位置と予測範囲を算出したならば、未測位中フラグをクリアし(ステップ322)、今回GPS受信機4から取得した測位データが示す測位位置が、予測範囲内に含まれるかどうかを調べ(ステップ310)、含まれている場合には、今回GPS受信機4から取得した測位データが示す測位位置を現在位置として出力し(ステップ312)、ステップ302に戻る。一方、今回GPS受信機4から取得した測位データが示す現在位置が、予測範囲内に含まれていない場合には、先に算出した予測位置を、現在位置として出力し(ステップ314)、ステップ302に戻る。
【0035】
以上、フィルタ処理が行うフィルタ処理について説明した。
ここで、このようなフィルタ処理の処理例を図5に示す。
いま、図5aに示すように、先の図6aの場合と同様に、自車両の現実の位置がt=1からt=8の期間にP1からP8に示すように移動したものとする。
そして、図5bに示すように、t=1からt=3の期間に、GPS受信機4から取得した測位データが表す測位位置がG1からG3と変化した後、t=4からt=6のGPS受信機4が衛星測位を行えないために測位データを取得できない期間が発生し、その後、t=7、t=8の期間に、GPS受信機4から取得した測位データが表す測位位置がG7、G8と変化したものとする。また、t=1からt=3の期間に予測位置C1からC3が算出され、t=1において図5bの測位位置G1と予測位置C1とから図5cのF1の位置が現在位置として出力され、t=2において図5bの測位位置G2と予測位置C2とから図5cのF2の位置が現在位置として出力され、t=3において図5bの測位位置G3と予測位置C3とから図5cのF3の位置が現在位置として出力されたものとする。
【0036】
そして、この場合、衛星測位によって位置が計測できないt=4からt=6の期間には、最後にGPS受信機4から正常に測位データを取得できたt=3の時点で決定された図5cの現在位置F3と、当該t=3の時点でGPS受信機4から取得した測位データが示す図5の移動速度V3より算出される各時点の予測位置C4からC6が図5cのF4からF6のように現在位置として決定される。
【0037】
また、t=7のGPS受信機4からの測位データの取得が正常に行えるように復帰した時点では、t=3の時点で決定された図5cの現在位置F3と、当該t=3の時点でGPS受信機4から取得した測位データが示す図5bの移動速度V3と、t=7の時点でGPS受信機4から取得した測位データが示す図5bの移動速度V7とより、図5bの予測位置C7が算出され、その周辺に予測範囲B7が設定される。
【0038】
ここで、図5a、bより理解されるように、このt=7の時点では、予測位置C7を、t=3の時点の移動速度、移動方向と、t=7の時点の移動速度、移動方向をより推定される、t=4からt=6の期間の自車両の移動量に基づいて算出するので、t=4からt=6の期間に自車両の移動方向や速度が変化していても、予測位置C7として、図5aに示す正しい現在位置P7に比較的近い位置を算出することができる。すなわち、本フィルタ処理によれば、GPS受信機4が衛星測位を行えないために測位データを取得できない期間の自車両の移動速度と移動方向を、その期間の直前における自車両の移動速度と移動方向とのみよって推定するのではなく、当該期間の前後における自車両の移動速度と移動方向とより推定する。したがって、より適切にGPS受信機4が衛星測位を行えないために測位データを取得できない期間の自車両の移動速度と移動方向の推定が行え、この結果、より現実の現在位置に近い位置に予測位置を算出することができるようになる。
【0039】
さて、このように、予測位置C7として、図5aに示す正しい現在位置P7に比較的近い位置に算出されるので、図5bに示すt=7の時点の測位位置G7が比較的正しく現在位置P7を示すものであれば、この測位位置G7は予測範囲B7内となり、図5cに示すように、この測位位置G7を、t=7の時点の現在位置F7として出力することができるようになる。
【0040】
以上、本発明の実施形態について説明した。
ところで、以上に説明したフィルタ処理のステップ320における予測位置の算出は、図4bに示すように行っても良い。
すなわち、図4bに示すように、前回以前に最後にGPS受信機4から測位データを取得した回nにステップ312または314で出力した現在位置がFnであるとする。また、その回nに、GPS受信機4から取得した測位データが示す測位位置がGn、移動速度がVn、移動方向がθ1であるとする。そして、方向θ1、大きさVnを持ったベクトルを移動ベクトル[Vn]とする。そして、今回n+mに、GPS受信機4から取得した測位データが示す測位位置がGn+m、移動速度がVn+m、移動方向がθ2であるとする。そして、方向θ2、大きさVn+mを持ったベクトルを移動ベクトル[Vn+m]とする。
【0041】
この場合、今回の予測位置Cn+mは、図示するように、回nに出力した現在位置Fnから、移動ベクトル[Vn]と移動ベクトル[Vn+m]との平均ベクトルの方向に、平均ベクトルの大きさに回nから今回までの経過時間(たとえば、各回のインターバルがTであるとすればm×T)乗じた距離進んだ位置を今回の予測位置Cn+mとすることにより求める。すなわち、回n移動ベクトルと今回n+mの移動ベクトルとの平均ベクトルを移動ベクトルとして、車両が回nから今回n+mまでの間移動したものとして、今回の予測位置Cn+mを求める。
なお、この場合にも、予測範囲Bn+mは、算出した予測位置Cn+mに基づいて上述のように算出する。
【0042】
また、以上のフィルタ処理のステップ312では、GPS受信機4から取得した測位位置に代えて、今回GPS受信機4から取得した測位データが示す測位位置と、前回以前に最後にGPS受信機4から正常に取得した測位データが示す測位位置の差分を、前回以前に最後にGPS受信機4から測位データを正常に取得した回に出力した現在位置に加算した位置を現在位置として算出するようにしてもよい。または、以上のフィルタ処理のステップ312では、GPS受信機4から取得した測位位置に代えて、所定の手法によって算出した測位位置と予測位置の信頼性に応じた加重を用いた、当該測位位置と予測位置との加重平均によって求めた位置を現在位置として出力してもよい。
【0043】
また、以上のフィルタ処理のステップ308では、ステップ320と同様にして予測位置と予測範囲を算出するようにしてもよい。
また、以上のフィルタ処理のステップ304でGPS受信機4から正常に測位データを取得できなかったと判定された場合には、現在位置は不明として、その出力を行わないようにしてもよい。
また、以上の実施形態は、GPS受信機4に代えてGPS衛星ではない他の測位用衛星が送信する電波、または、地上局が送信する電波を用いた電波航法によって測位データの計測を行う受信機を備える場合にも、同様に適用することができる。
【図面の簡単な説明】
【0044】
【図1】本発明の実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】本発明の実施形態に係るナビゲーション装置の表示画面例を示すブロック図である。
【図3】本発明の実施形態に係るフィルタ処理を示すフローチャートである。
【図4】本発明の実施形態に係る予測位置と予測範囲の算出例を示す図である。
【図5】本発明の実施形態に係るフィルタ処理の処理例を示す図である。
【図6】従来の現在位置算出例を示す図である。
【符号の説明】
【0045】
1…制御装置、2…操作部、3…表示装置、4…GPS受信機、11…フィルタ処理部、12…現在位置算出部、13…地図データ記憶部、14…ルート探索部、15…メモリ、16…制御部、17…案内画像生成部、18…GUI制御部。
【特許請求の範囲】
【請求項1】
移動体の現在位置を算出する現在位置算出装置であって、
受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、
前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とを有し、
前記現在位置算出部は、
今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、
前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを有することを特徴とする現在位置算出装置。
【請求項2】
移動体の現在位置を算出する現在位置算出装置であって、
受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、
前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とを有し、
前記現在位置算出部は、
前記電波航法部が測位データを計測できなかった期間の経過直後の回において、今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、
前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを有することを特徴とする現在位置算出装置。
【請求項3】
請求項1または2記載の現在位置算出装置であって、
前記予測手段は、今回前記電波航法部が計測した測位データが表す移動方向と過去に前記電波航法部が計測した測位データが表す移動方向との平均によって求まる方向に、今回前記電波航法部が計測した測位データが表す移動速度と過去に前記電波航法部が計測した測位データが表す移動速度との平均によって求まる速度で、前記電波航法部が過去最後に測位データを計測してから今回までの経過時間分移動した場合に得られる移動量を、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量として推定することを特徴とする現在位置算出装置。
【請求項4】
請求項1、2または3記載の現在位置算出装置であって、
前記予測手段は、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする所定の大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする所定の大きさの範囲となるように前記予測範囲を設定することを特徴とする現在位置算出装置。
【請求項5】
請求項2記載の現在位置算出装置であって、
前記予測手段は、
今回前記電波航法部が計測した測位データが表す移動方向と過去に前記電波航法部が計測した測位データが表す移動方向との平均によって求まる方向に、今回前記電波航法部が計測した測位データが表す移動速度と過去に前記電波航法部が計測した測位データが表す移動速度との平均によって求まる速度で、前記電波航法部が過去最後に測位データを計測してから今回までの経過時間分移動した場合に得られる移動量を、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量として推定し、かつ、
前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする、前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする、記前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となるように前記予測範囲を設定することを特徴とする現在位置算出装置。
【請求項6】
請求項1、2、3、4または5記載の現在位置算出装置であって、
前記現在位置決定手段は、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれている場合に、今回前記電波航法部が計測した測位データが表す位置を今回算出する現在位置として決定し、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれていない場合に、前記予測位置を今回算出する現在位置として決定することを特徴とする現在位置算出装置。
【請求項7】
請求項1、2、3、4、5または6記載の現在位置算出装置であって、
前記移動体は自動車であり、前記電波航法部は衛星測位によって前記測位データを計測することを特徴とする現在位置算出装置。
【請求項8】
請求項7記載の現在位置算出装置と、
前記現在位置算出装置が算出した現在位置と地図とのマップマッチングによって算出した現在位置を、地図を表す地図画像表示に表示した案内画像を表示する現在位置表示部とを有することを特徴とするナビゲーション装置。
【請求項1】
移動体の現在位置を算出する現在位置算出装置であって、
受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、
前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とを有し、
前記現在位置算出部は、
今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、
前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを有することを特徴とする現在位置算出装置。
【請求項2】
移動体の現在位置を算出する現在位置算出装置であって、
受信電波を利用する電波航法により移動体の位置と移動速度と移動方向を表す測位データの計測を行う電波航法部と、
前記電波航法部が算出した測位データに基づいて、逐次各回の現在位置の算出を行う現在位置算出部とを有し、
前記現在位置算出部は、
前記電波航法部が測位データを計測できなかった期間の経過直後の回において、今回前記電波航法部が計測した測位データが表す移動速度と移動方向と、過去に前記電波航法部が計測した測位データが表す移動速度と移動方向とに基づいて、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量を推定し、推定した移動量を、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置に加算した位置を予測位置として設定すると共に、設定した予測位置の周辺に予測範囲を設定する予測手段と、
前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれているかどうかに基づいて、今回前記電波航法部が計測した測位データが表す位置の信頼度を算定し、算定した信頼度と、前記電波航法部が計測した測位データが表す位置と、前記予測位置とに基づいて、今回現在位置として算出する位置を決定する現在位置決定手段とを有することを特徴とする現在位置算出装置。
【請求項3】
請求項1または2記載の現在位置算出装置であって、
前記予測手段は、今回前記電波航法部が計測した測位データが表す移動方向と過去に前記電波航法部が計測した測位データが表す移動方向との平均によって求まる方向に、今回前記電波航法部が計測した測位データが表す移動速度と過去に前記電波航法部が計測した測位データが表す移動速度との平均によって求まる速度で、前記電波航法部が過去最後に測位データを計測してから今回までの経過時間分移動した場合に得られる移動量を、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量として推定することを特徴とする現在位置算出装置。
【請求項4】
請求項1、2または3記載の現在位置算出装置であって、
前記予測手段は、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする所定の大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする所定の大きさの範囲となるように前記予測範囲を設定することを特徴とする現在位置算出装置。
【請求項5】
請求項2記載の現在位置算出装置であって、
前記予測手段は、
今回前記電波航法部が計測した測位データが表す移動方向と過去に前記電波航法部が計測した測位データが表す移動方向との平均によって求まる方向に、今回前記電波航法部が計測した測位データが表す移動速度と過去に前記電波航法部が計測した測位データが表す移動速度との平均によって求まる速度で、前記電波航法部が過去最後に測位データを計測してから今回までの経過時間分移動した場合に得られる移動量を、前記電波航法部が過去最後に測位データを計測してから今回までの移動体の移動量として推定し、かつ、
前記電波航法部が過去最後に測定データを計測した回に算出した現在位置からの距離の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置と設定した予測位置との間の距離を中心とする、前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となり、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た方向の範囲が、前記電波航法部が過去最後に測定データを計測した回に算出した現在位置から見た前記予測位置の方向を中心とする、記前記電波航法部が測位データを計測できなかった期間の長さに応じて定まる大きさの範囲となるように前記予測範囲を設定することを特徴とする現在位置算出装置。
【請求項6】
請求項1、2、3、4または5記載の現在位置算出装置であって、
前記現在位置決定手段は、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれている場合に、今回前記電波航法部が計測した測位データが表す位置を今回算出する現在位置として決定し、前記予測手段が設定した予測範囲内に、今回前記電波航法部が計測した測位データが表す位置が含まれていない場合に、前記予測位置を今回算出する現在位置として決定することを特徴とする現在位置算出装置。
【請求項7】
請求項1、2、3、4、5または6記載の現在位置算出装置であって、
前記移動体は自動車であり、前記電波航法部は衛星測位によって前記測位データを計測することを特徴とする現在位置算出装置。
【請求項8】
請求項7記載の現在位置算出装置と、
前記現在位置算出装置が算出した現在位置と地図とのマップマッチングによって算出した現在位置を、地図を表す地図画像表示に表示した案内画像を表示する現在位置表示部とを有することを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−24503(P2007−24503A)
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願番号】特願2005−202491(P2005−202491)
【出願日】平成17年7月12日(2005.7.12)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願日】平成17年7月12日(2005.7.12)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]