
現在位置表示装置、及び現在位置表示方法
【課題】ジャイロスコープの出力を用いて現在位置を精度良く地図上に表示すること。
【解決手段】現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段と、を備え、前記現在位置検出手段によって仮想現在位置を検出し、前記傾斜判定手段によって検出された角速度に基づいて前記傾斜判定手段が傾斜角度を算出し、前記傾斜角度に基づいて地図データベースを参照して前記仮想現在位置付近の前記候補となるリンクに対する信頼度を算出し、前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理し、前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示する。
【解決手段】現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段と、を備え、前記現在位置検出手段によって仮想現在位置を検出し、前記傾斜判定手段によって検出された角速度に基づいて前記傾斜判定手段が傾斜角度を算出し、前記傾斜角度に基づいて地図データベースを参照して前記仮想現在位置付近の前記候補となるリンクに対する信頼度を算出し、前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理し、前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置表示装置、及び現在位置表示方法に関し、特に、高速道路等の本線、又は高速道路本線から一般道への進入路、分岐路における走行を検出して地図上に正しく表示することができる現在位置表示装置、及び現在位置表示方法に関する。
【背景技術】
【0002】
従来、ナビゲーション装置においては、GPS衛星からのGPS信号を受信し、その情報に基づいて現在位置を算出し、算出した現在位置をナビゲーション装置に設けられた表示画面上に表示されている地図に表示することにより、ユーザが今どこにいるのか識別できるようにしている。
【0003】
さらに、求められた現在位置のデータを地図データベースに記憶されている道路データと比較し、現在位置が道路データ上にない場合等は、各種のマッチング方法を用いて適切な道路上に現在位置をマッチングし、表示画面に地図とともに現在位置を表示している。
【0004】
しかしながら、一般的な高速道路等においては、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする。このような場合、ナビゲーション装置は、高速道路の本線を走行しているのか、それとも一般道を走行しているのか判断することが困難であり、正確なマッチング処理を行うことができず、地図上に不正確な現在位置表示を行ってしまう場合があった。
【0005】
下記特許文献1(平9−304095号公報)は、「車載用ナビゲーション装置」についての発明を開示している。この車載用ナビゲーション装置は、方位センサ、車速センサ、自動車の速度、進行方向変化量、停車時間、連続走行時間等に基づいてナビゲーション装置を搭載した車両が高速道路上か否かを判定することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−304095号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、ナビゲーション装置が車両に固定的に設置されるようなタイプの場合、車から配線される車速パルス信号や傾斜センサ等の信号の入力を受け付けることができる。そのため、GPS信号による現在位置の算出に加え、上記入力された信号を用いて現在位置の算出結果を補正し、より正確な現在位置を検出することができる。
【0008】
しかしながら、ナビゲーション装置が車両に取り外し可能に設置されるようなタイプ(ポータブルタイプ)の場合、車両へ装着する度に、車から配線される車速パルス信号や傾斜センサ等との配線作業を行うのはユーザにとって負担となるため、通常は、このような配線は行わずに使用されるケースが多い。そして、車から配線される車速パルス信号や傾斜センサ等からの入力信号を受けることはできないと、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする場合に、ナビゲーション装置は車両が高速道路の本線を走行しているのか、又は一般道を走行しているのかを判定できないため、現在位置を正確に地図上に表示することができないという課題が生じる。
【0009】
そこで、本発明の目的は、ジャイロスコープを内蔵したナビゲーション装置において、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする場合でも、ジャイロスコープの出力を用いて現在位置を精度良く判定し地図上に表示することができる現在位置表示装置、及び現在位置表示方法を提供することである。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明の現在位置表示装置は、
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備え、前記マップマッチング手段が前記現在位置検出手段によって検出された仮想現在位置を、前記地図データベースから特定したマップマッチングの候補となるリンク上に実際の現在位置としてマッチング処理し、前記実際の現在位置を前記表示制御手段が前記表示手段に地図画像とともに表示する現在位置表示装置において、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、前記傾斜判定手段は、検出した角速度に基づいて傾斜角度を算出し、前記傾斜角度と前記地図データベースを参照して前記候補となるリンクに対する信頼度を算出し、算出された該信頼度に基づき前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理することを特徴とする。
【0011】
また、上記現在位置表示装置の発明の一態様において、
前記地図データベースは、前記傾斜判定手段が傾斜角度を算出すべき地点である第1検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第1検知地点付近にあるときに傾斜角度を算出し、算出した該傾斜角度に基づいて前記候補となるリンクに対する第1の信頼度を算出することを特徴とする。
【0012】
また、上記現在位置表示装置の発明の一態様において、
前記地図データベースは、前記第1検知地点に関連付けられた第2検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第2検知地点付近にあるときにさらに傾斜角度を算出し、算出した該傾斜角度に基づいて前記第1の信頼度を補正することを特徴とする。
【0013】
また、本発明の現在位置表示方法は、
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置における現在位置表示方法であって、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、
(1)前記現在位置検出手段によって仮想現在位置を検出するステップと、
(2)検出した角速度に基づいて前記傾斜判定手段が傾斜角度を算出するステップと、
(3)前記傾斜角度と前記地図データベースを参照して前記仮想現在位置付近のマップマッチングの候補となるリンクに対する信頼度を算出するステップと、
(4)前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理するステップと、
(5)前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示するステップと、
を備えることを特徴とする。
【発明の効果】
【0014】
本発明の現在位置表示装置によれば、下記に示すような優れた効果を奏する。
【0015】
すなわち、本発明の現在位置表示装置は、角速度の変化を検出する傾斜判定手段を備え、前記傾斜判定手段は、検出した角速度に基づいて傾斜角度を算出し、前記傾斜角度と前記地図データベースを参照して前記候補となるリンクに対する信頼度を算出し、算出された該信頼度に基づき前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理する。これにより、車両の傾きの変化を識別することで、精度良くマッチング処理を行い、現在位置をより正確にユーザに通知することができるようになる。
【0016】
また、本発明の一態様によれば、傾斜判定手段が傾斜角度を算出すべき第1検知地点、例えば高速道路等の本線と連結路がほぼ平行に設けられ、且つ、連結路が本線に対しわずかな分岐角度で設けられているような地点を記憶しておき、この地点に差し掛かったときに傾斜角度を算出し、さらにそれに基づいて候補となるリンクに対する信頼度を算出し、信頼度の高いリンク上にマッチング処理する。これにより、信頼度良くマッチング処理を行うことが可能となる。
【0017】
また、本発明の一態様によれば、傾斜判定手段が傾斜角度を算出すべき第1地点とそれに関連付けられた第2検知地点を示す情報を記憶しておき、傾斜判定手段は、仮想現在位置が第1検知地点と第2検知地点付近にあるときにそれぞれ傾斜角度を算出し、第1検知地点の信頼度に対して第2検知地点で算出された傾斜角度でもって信頼度を補正する。これにより、2箇所において傾斜角度を算出するから、1箇所で傾斜角度を算出して信頼度を求めていたときに比べてさらに精度よくマップマッチングを行うことが可能となる。
【0018】
また、本発明の現在位置表示方法によれば、上記の現在位置表示装置におけるのと同様に、精度良く現在位置の表示を行うことができるという効果を奏することが可能となる。
【図面の簡単な説明】
【0019】
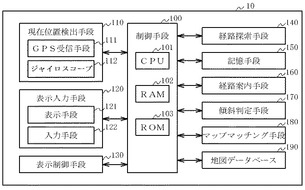
【図1】本実施例に係るナビゲーション装置10の内部ブロック図を示す。
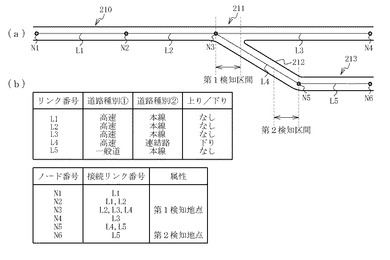
【図2】本実施例の地図データベース190に記憶されている道路データの説明図である。
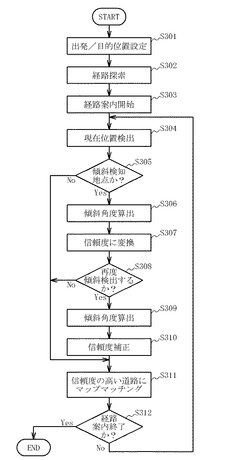
【図3】本実施例のナビゲーション装置10における経路案内及び現在位置表示方法の動作を示すフローチャートである。
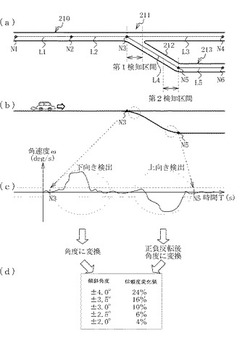
【図4】本実施例のナビゲーション装置10において、検出された傾きに基づいてマップマッチングを行う方法の概略説明図である。
【発明を実施するための形態】
【0020】
以下、本願発明を実施するための最良の形態を実施例と共に図1〜図4を参照して詳細に説明する。ただし、以下に示す実施例は、本発明の技術思想を具体化するための現在位置表示装置、及び現在位置表示方法としてナビゲーション装置を例示して説明するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の現在位置表示装置、及び現在位置表示方法にも等しく適用し得るものである。
【実施例1】
【0021】
図1は、本実施例に係るナビゲーション装置10の内部ブロック図を示している。図1に示されているように、ナビゲーション装置10は制御手段100、現在位置検出手段110、表示入力手段120、表示制御手段130、経路探索手段140、記憶手段150、経路案内手段160、傾斜判定手段170、マップマッチング手段180、地図データベース190を備えて構成されている。
【0022】
制御手段100は、CPU101、RAM102、ROM103を備えて構成されており、RAM102及び/又はROM103に記憶された制御プログラムをCPU101において実行することにより、下記に説明する各部の動作を制御・統括する。
【0023】
現在位置検出手段110は、GPS受信手段111を備えており、GPS受信手段111が所定の時間間隔で地球上空を周回している複数のGPS衛星から受信する時刻情報を含む電波(衛星信号)に基づき車両の位置情報(GPS測位位置)を算出する。
【0024】
現在位置検出手段110は、また、加速度センサ(図示せず)や、ジャイロスコープ112などの自律航法センサを備えることで、加速度センサ及びジャイロスコープ112からの出力に基づき、GPS受信手段111が受信した衛星信号に基づき算出した位置情報を補正することもできる。また、自律航法センサを備えることで、GPS衛星信号が受信できないトンネルや地下街、地下駐車場、建物内の駐車場、あるいは、高層ビル街などGPS衛星信号の反射によるマルチパスの影響を受ける場所でも、加速度センサやジャイロスコープ112からの出力によりナビゲーション装置10(車両)の位置を算出することができる。
【0025】
表示入力手段120は表示手段121と入力手段122より構成される。表示手段121は液晶表示ユニットであり、入力手段122は液晶表示ユニットの液晶画面上に取り付けられたタッチパネルである。表示手段121は、本実施例のナビゲーション装置10で表示される地図画像、案内経路を示す表示画像等を表示し、入力手段122はユーザにより操作されて、出発位置、目的位置等の経路探索条件の入力を行うのに用いられる。
【0026】
表示制御手段130は、記憶手段150に記憶された案内経路(後述)に沿って地図データベース190から抽出された地図画像を処理して表示手段121に表示したり、地図画像に案内経路を示す表示画像を重ねて表示手段121に表示したりするものである。
【0027】
経路探索手段140は、出発位置又は現在位置検出手段110によって検出された現在位置から表示入力手段120を用いてユーザが設定した目的位置に至る最適な経路(案内経路)を、地図データベース190に記憶されている地図情報を参照して探索するが、出発位置又は現在位置に対応する道路のノードから目的位置に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路として得る。
【0028】
記憶手段150は、表示入力手段120によってユーザが入力した出発位置や目的位置、また、経路探索手段140によって経路探索された案内経路を案内経路データとして記憶する。さらに、ジャイロスコープ112から出力された角速度に基づき傾斜判定手段170が算出したナビゲーション装置10の傾斜角度(車両の傾斜角度)を記憶する。
【0029】
なお、本実施例では、ナビゲーション装置10が車両に対して平行に設置されているものとし、以下の説明では、傾斜判定手段170が算出した傾斜角度を車両の傾斜角度として説明を行う。
【0030】
経路案内手段160は、記憶手段150に記憶された案内経路と、現在位置検出手段110によって検出された現在位置とに基づいて、表示制御手段130に地図データベース190から現在位置周辺の地図情報の抽出と案内経路を示す表示画像の表示を指示し、表示制御手段130は、抽出した地図画像に案内経路を示す表示画像を重ねて表示手段121に表示する。また、経路案内手段160は、ナビゲーション装置10がスピーカ等を備える場合には、経路案内の音声ガイダンスを放送するなどしてユーザが案内経路に沿って移動するのを助ける。なお、音声ガイダンスは、地図データベース190の道路データに対応付けられて地図データベース190等に記憶されていることが好ましい。
【0031】
傾斜判定手段170は、現在位置が道路データのノードに関連付けられた傾斜を検出すべき地点(検知地点)にあるか否かの判定を行い、現在位置が傾斜検知地点にあると判定した場合に、ジャイロスコープ112から出力された角速度データを所定時間積分することにより、車両の傾斜角度を算出し、記憶手段150に記憶する。
【0032】
さらに、傾斜判定手段170は、算出した傾斜角度と道路データのリンクに関連付けられた上り/下り属性を比較することによって、後述するマップマッチング手段180により特定されたマップマッチングの候補となるリンクに対する信頼度を算出する。ここで、マップマッチングの候補となるリンクとは、例えば、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする場合は、本線と分岐路及び/又は進入路に対応したリンクを言う(図2で示す、ノードN3から分岐するリンクL3及びリンクL4)また、信頼度とは、マップマッチングの候補となるリンクのうちのどのリンクを走行している可能性が高いかを示す指標となる評価値であり。
【0033】
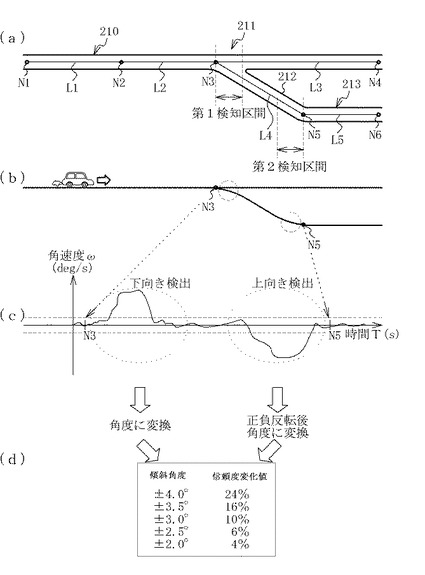
具体的には、図4(d)に示すように、傾斜角度と信頼度の変化値を対応付けたデータテーブルを記憶手段150等に設けておき、傾斜角度が算出された場合に、マップマッチングの候補となるリンクに対する信頼度を算出された傾斜角度に対応した信頼度の変化値だけ変化させる。例えば、リンク属性として「上り」が付加されたリンクと、「属性なし」のリンクがマップマッチングの候補となっている場合に、プラス3度の傾斜角度が算出された場合、図4(d)に示されるデータテーブルを参照して「属性なし」のリンクに対する信頼度を10%差し引く。つまり、「上り」が付加されたリンクと、「属性なし」のリンク、それぞれの評価値が予め100%に設定されていた場合、「属性なし」のリンクの評価値を10%差し引いて90%とする。これにより信頼度が高い「上り」が付加されたリンクに対し後述するマップマッチング手段180によるマップマッチング処理が行われる。
【0034】
また、傾斜判定手段170は、一度傾斜検出を行った後に再度傾斜検出を行う必要があるか否かを判定し、所定条件を満たす場合に再度傾斜角度を算出し、マップマッチングの候補となるリンクに対する信頼度を算出する。なお、所定条件とは最初に行った傾斜算出の際にマップマッチングの候補となるリンク(図2で示す、リンクL3とリンクL4)の信頼度の差が所定値以下の場合(どちらのリンクにマップマッチングするか決着がつかない場合)や、地図データベース190の道路データのノード属性に再度傾斜検出を行うべき地点(第2検知地点)が設定されている場合である。
【0035】
そして、再度傾斜検出を行う場合も同様にマップマッチングの候補となっているリンクに対する信頼度の算出を行う。
【0036】
なお、車両が第1検知区間を通過する際にジャイロスコープ112から出力される角速度データを正の角速度データとした場合、第2検知区間を通過する際に出力される角速度データは負の角速度データとなる。そこで、第2検地区間で角速度データが出力された場合、出力された角速度データの正負を反転させたうえで傾斜角度を求める。
【0037】
マップマッチング手段180は、現在位置検出手段110によって算出された現在位置を仮想現在位置とし、その仮想現在位置の近隣にあるマップマッチングの候補となるリンク、特に、本実施例では、本線に対応するリンクと、本線からわずかな傾斜角度で分岐している分岐路や進入路等に対応したリンクを特定する(図2で示す、ノードN3から分岐するリンクL3、L4)。次いでマップマッチング手段180は、仮想現在位置からそれらのリンクに垂線を下ろし、垂線とリンクの交点を実際の現在位置候補とし、仮想現在位置から現在位置候補までの距離に、これらマップマッチングの候補となるリンクに対する信頼度(傾斜判定手段170により算出)をそれぞれ加味して最も信頼度の高いリンク上の位置を実際の現在位置とする。つまり、本実施例では、仮想現在位置から現在位置候補までの距離に加え、傾斜判定手段170により算出されたマップマッチングの候補となるリンクに対する信頼度を総合させて実際の現在位置を特定することができるようになる。
【0038】
地図データベース190は、道路データ、建物データ、背景データ、テキストデータから構成される地図情報を保持している。
【0039】
道路データは、道路をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータから構成される。ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、交差点情報や交差点名称及び傾き検出地点(図2における第1検知地点、第2検知地点)であることを示す情報等のノード属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0040】
なお、図2における第2検知地点は、第1検知地点に対応した検知地点として対応づけられて記憶されている。
【0041】
また、リンクデータは、リンクの始点及び終点となるノード番号、高速道路や一般道や街路等を区別するための第一道路種別、さらに、それぞれの道路の本線や連結路を区別するための第2道路種別、さらに道路の傾斜をあらわす上り/下り属性、距離及び/又は所要時間、国道○号線のような道路名称、進行方向のデータを含んで構成される。上り/下り属性には、上記の情報に加えて道路の実際の勾配の情報が記憶されるようにしてもよい。リンクデータは上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0042】
建物データは、建物の少なくとも3点からなる位置座標(緯度・経度)、駅、ビル、民家等の建物の種別、表示色のデータを含んで構成される。また背景データは、海岸線、湖沼、河川形状、山林等の背景画像データとなる少なくとも3点からなる位置座標(緯度・経度)、表示色のデータを含んで構成される。
【0043】
テキストデータは、それぞれの地名や河川名等の文字(名称)、及びその座標(緯度・経度)のデータを含んで構成される。
【0044】
なお、上記のナビゲーション装置10は、地図データベース190をナビゲーショ装置10に内蔵したスタンドアロン型のものとして説明したが、本発明はこれに限定されることはない。例えば、ナビゲーション装置10に通信手段(図示せず)を設け、ナビゲーション装置10の外部の情報提供サーバ(図示せず)に接続して通信を行い、情報提供サーバに備えられた地図データベースから上記の案内経路に関連付けられた地図情報を取得するようにしてもよい。
【0045】
その場合、ナビゲーション装置10は出発地点又は現在地点と目的地点とを指定し、これを経路探索条件として情報提供サーバに送信し、経路探索を依頼する。情報提供サーバは経路探索手段が設けられており、ナビゲーション装置10から受信した出発地点又は現在地点と目的地点とを経路探索条件として経路探索を行い、探索結果をナビゲーション装置10へ送信する。
【0046】
次に、図2を参照して、本実施例の地図データベース190に記憶されている道路データについて詳細に説明する。なお、図2は本実施例の地図データベースに記憶されている道路データの説明図である。
【0047】
図2に示されるように、高速道路210にインターチェンジ211が設けられており、そこでは連結路212が分岐して一般道213に接続するような道路がある(図2(a))とする。その場合、道路データは、高速道路210の起点となるノードN1、高速道路210の中間地点のノードN2、インターチェンジ211における高速道路210と一般道213への連結路212との分岐点となるノードN3、高速道路210の終点となるノードN4、連結路212と一般道213の接続点であるノードN5、一般道213の終点となるノードN6、高速道路210に対応付けられたリンクL1~L3、高速道路から一般道にかけての連結路212に対応付けられたリンクL4、連結路212に接続された一般道213に対応付けられたリンクL5から構成される。
【0048】
さらに、連結路212に対応するリンクL4には上り/下り属性として「下り」が付加されている(図2(b))。これは、高速道路210から連結路212で分岐した後ある程度の傾斜で下っていき、一般道213に接続していることを表している。なお、上り/下り属性には、道路の実際の勾配の情報が含まれるようにしてもよい。
【0049】
また、上り/下り属性を備えているリンクL4の両端のノードN3、ノードN5にはその地点が傾きを検出すべき地点であることを示す第1検知地点(N3)、第2検知地点(N5)の情報が関連付けられている。
【0050】
次に、図3及び図4を参照して本実施例に係るナビゲーション装置10における現在位置表示方法について説明する。なお、図3は本実施例のナビゲーション装置10における経路案内及び現在位置表示方法の動作を示すフローチャートである。また、図4は、本実施例のナビゲーション装置10において、検出された傾きに基づいてマップマッチングを行う方法を示す概略説明図である。
【0051】
まず、ステップS301において、表示入力手段120を構成する入力手段122を介してユーザにより出発位置と目的位置が入力・設定される。そして、入力された出発位置、目的位置は記憶手段150に記憶される。
【0052】
次いでステップS302において、経路探索手段140が記憶手段150に記憶された出発位置と目的位置に基づき、地図データベース190を参照し、経路探索を行う。経路探索は、出発位置又は現在位置に対応する道路のノードから目的位置に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路とし、当該経路に属する道路のノードやリンクを案内経路データとして記憶手段150に記憶する。
【0053】
なお、上記において、ユーザが出発地点を特定しない場合には、現在位置検出手段110によって検出された現在位置から目的位置までの経路探索を行う。
【0054】
ステップS303において、経路案内手段160は経路案内を開始し、ステップS304において、現在位置検出手段110が現在位置を算出し、これを仮想現在位置とする。ステップS305において傾斜判定手段170は、地図データベース190の道路データに記憶されているノードデータの属性を参照することにより、仮想現在位置が傾斜を検知すべき地点にあるか否かを判定する。具体的には、自動車が高速道路210を走行しており、インターチェンジ211に差し掛かった場合、傾斜判定手段170はノードN3に関連付けられている第1検知地点の情報に基づき現在位置が傾斜を検知すべき地点に位置していることを判定する。なお、図2、図4では、傾斜を検知すべき地点ではなく、第1検知地点から所定距離範囲に及ぶ区間(第1検知区間)として示しており、この区間内において傾斜が算出される。なお、この第1検知区間の範囲は変更可能であり、任意に設定することもできる。
現在位置が傾斜を検出すべき地点にいないと判定された場合はステップS311の処理に進み、マップマッチング手段180が通常のマップマッチングを行い、経路案内が終了していなければステップS304の処理に戻る。
【0055】
ステップS305において現在位置が傾斜を検出すべき地点であると判定された場合、続くステップS306の処理に進む。なお、このとき、車両は図4において高速道路210と一般道213への連結路212との分岐点となるノードN3を通過し、ノードN3に接続されているリンクL3(本線)、L4(連結路)のどちらかを走行しようとしている状態に対応している。
【0056】
ステップS306において、傾斜判定手段170は、ジャイロスコープ112によって出力された角速度を所定時間積分することで車両の傾斜角度を求め、記憶手段150に記憶する。なお、角速度の積分計算はジャイロスコープ112自体に行わせてもよい。
【0057】
ステップS307において、傾斜判定手段170は、ステップS306の処理で求めた傾斜角度に基づいて、ノードN3に接続されたリンクL3、L4のそれぞれに対する走行信頼度を求める。具体的には、算出された傾斜角度と、リンクL3、L4に関連付けられた上り/下り属性を比較することによって信頼度を算出する。リンクに関連付けられた上り/下り属性に道路の勾配の情報が含まれている場合、傾斜判定手段170はこの勾配情報を、算出された傾斜角度と比較することにより、候補となるそれぞれのリンクL3、L4に対する信頼度を算出することもできる。
【0058】
続くステップS308において、傾斜判定手段170は再度傾斜角度を検出するか否かを判定する。具体的には、ステップS307において求められたそれぞれの候補となるリンクに対する信頼度の差が所定値に満たない場合、再度傾斜角度検出を行うと判断する。或いは、地図データベース190の道路データのノード属性を参照し、第2検知地点が設定されている場合に再度傾斜角度の検出を行うこともできる。
【0059】
例えば、ノードN3において第1検知地点であることが検出された場合、傾斜判定手段170はそれに続くリンクの端点となるノードN4、N5に第2検知地点、つまり、第1検知地点に関連付けられた第2の検知地点が設けられているか否かを判定し、第2検知地点がない場合はステップS311の処理に進み、マップマッチング手段180は候補となるリンクのうちより信頼度の高いリンク上にマップマッチング処理を行う。
【0060】
第2検知地点がある場合はステップS309の処理に進む。なお、実際には傾斜を検知すべきなのは、第2検知地点から手前の所定距離範囲に及ぶ区間であり、図4では第2検知区間として示している。この第2検知区間の範囲は変更可能であり、任意に設定することもできる。
【0061】
ステップS309において、連結路212付近を走行中であるとみなされ、仮想現在位置が第2検知区間に差し掛かると、傾斜判定手段170は、ジャイロスコープ112から出力された角速度を所定時間積分することで車両の傾斜角度を求める。
【0062】
なお、車両がインターチェンジ211において本線から連絡路212に分岐して走行している場合、ノードN3から始まる第1検知区間を通過する際にジャイロスコープ112から出力される角速度データを正の角速度とした場合、ノードN5に至る第2検知区間を通過する際に出力される角速度データは負の角速度データとなる。そこで、第2検地区間で出力された角速度データの正負を反転させたうえで傾斜角度を求める。
【0063】
続くステップS310において、傾斜判定手段170は、新たに測定した傾斜角度に基づいて該当するリンクL3、L4のそれぞれに対する走行信頼度を補正する。この走行信頼度の補正は、第1検知地点で得られた信頼度が低い場合にのみ行ってもよいし、第1検知地点で求められた信頼度に、第2検知地点で求められた信頼度を加算することによって行ってもよい。
【0064】
ステップS311において、マップマッチング手段180は、仮想現在位置から現在位置候補までの距離に、上記の方法で求められた傾斜角度に基づく信頼度を加味し、総合的に信頼度の高いほうのリンクを走行リンクとして特定し、現在位置を特定されたリンクの所定位置にマップマッチングし、表示制御手段130は、表示手段121に地図画像とともに案内画像を表示する。
【0065】
ステップS312において、経路案内手段160は、マップマッチングされた現在位置が目的位置か否かを判定することによって経路案内を終了すべきか判定する。目的位置に到達しているなら、経路案内を終了する。目的位置に達していない場合は、ステップS304の処理に進む。
【0066】
上記の方法により、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行、且つ、わずかな分岐角度で設けられているような場合に、ナビゲーション装置に内蔵されたジャイロスコープの角速度の出力を用いて車両の傾き角度を検出し、その傾き角度から関係するリンクに対する信頼度を算出し、より信頼度の高いものを走行リンクとして特定し、現在位置をそのリンク上にマップマッチングすることにより、マッチングの精度を向上することが可能となる。
【0067】
さらに、車両の傾き角度を第1の検知地点において検出した場合に、第1検知地点に関連付けられた第2の地点においても車両の傾き角度を検出し、第1検出地点で求められた信頼度を補正し、信頼度の高いものを走行リンクとして特定し、現在位置をそのリンク上にマップマッチングする。これにより、より精度の高いマップマッチングすることが可能となる。
【0068】
なお、上記の実施例では、本発明の現在位置表示装置としてナビゲーション装置を例示し、出発位置と目的位置を指定し、経路探索を行って得られた経路に沿って経路案内を行う場合を示したが、本発明はこれに限定されない。例えば、経路案内は行わず、現在位置検出手段110によって検出された現在位置を対応する地図上に表示するような場合にも適合することができる。
【0069】
また、本実施例では、ジャイロスコープ112の出力に基づき傾斜判定手段170が車両の傾斜角度を算出するように記載したが、これに限るものではなく、例えば、加速度センサや傾斜センサ等の出力を用いて傾斜角度を算出できるのであれば、これら各種センサの出力を用いて算出しても構わない。
【符号の説明】
【0070】
10 ナビゲーション装置
100 制御手段
110 現在位置検出手段
112 ジャイロスコープ
120 表示入力手段
130 表示制御手段
140 経路探索手段
150 記憶手段
160 経路案内手段
170 傾斜判定手段
180 マップマッチング手段
190 地図データベース
【技術分野】
【0001】
本発明は、現在位置表示装置、及び現在位置表示方法に関し、特に、高速道路等の本線、又は高速道路本線から一般道への進入路、分岐路における走行を検出して地図上に正しく表示することができる現在位置表示装置、及び現在位置表示方法に関する。
【背景技術】
【0002】
従来、ナビゲーション装置においては、GPS衛星からのGPS信号を受信し、その情報に基づいて現在位置を算出し、算出した現在位置をナビゲーション装置に設けられた表示画面上に表示されている地図に表示することにより、ユーザが今どこにいるのか識別できるようにしている。
【0003】
さらに、求められた現在位置のデータを地図データベースに記憶されている道路データと比較し、現在位置が道路データ上にない場合等は、各種のマッチング方法を用いて適切な道路上に現在位置をマッチングし、表示画面に地図とともに現在位置を表示している。
【0004】
しかしながら、一般的な高速道路等においては、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする。このような場合、ナビゲーション装置は、高速道路の本線を走行しているのか、それとも一般道を走行しているのか判断することが困難であり、正確なマッチング処理を行うことができず、地図上に不正確な現在位置表示を行ってしまう場合があった。
【0005】
下記特許文献1(平9−304095号公報)は、「車載用ナビゲーション装置」についての発明を開示している。この車載用ナビゲーション装置は、方位センサ、車速センサ、自動車の速度、進行方向変化量、停車時間、連続走行時間等に基づいてナビゲーション装置を搭載した車両が高速道路上か否かを判定することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−304095号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、ナビゲーション装置が車両に固定的に設置されるようなタイプの場合、車から配線される車速パルス信号や傾斜センサ等の信号の入力を受け付けることができる。そのため、GPS信号による現在位置の算出に加え、上記入力された信号を用いて現在位置の算出結果を補正し、より正確な現在位置を検出することができる。
【0008】
しかしながら、ナビゲーション装置が車両に取り外し可能に設置されるようなタイプ(ポータブルタイプ)の場合、車両へ装着する度に、車から配線される車速パルス信号や傾斜センサ等との配線作業を行うのはユーザにとって負担となるため、通常は、このような配線は行わずに使用されるケースが多い。そして、車から配線される車速パルス信号や傾斜センサ等からの入力信号を受けることはできないと、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする場合に、ナビゲーション装置は車両が高速道路の本線を走行しているのか、又は一般道を走行しているのかを判定できないため、現在位置を正確に地図上に表示することができないという課題が生じる。
【0009】
そこで、本発明の目的は、ジャイロスコープを内蔵したナビゲーション装置において、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする場合でも、ジャイロスコープの出力を用いて現在位置を精度良く判定し地図上に表示することができる現在位置表示装置、及び現在位置表示方法を提供することである。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明の現在位置表示装置は、
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備え、前記マップマッチング手段が前記現在位置検出手段によって検出された仮想現在位置を、前記地図データベースから特定したマップマッチングの候補となるリンク上に実際の現在位置としてマッチング処理し、前記実際の現在位置を前記表示制御手段が前記表示手段に地図画像とともに表示する現在位置表示装置において、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、前記傾斜判定手段は、検出した角速度に基づいて傾斜角度を算出し、前記傾斜角度と前記地図データベースを参照して前記候補となるリンクに対する信頼度を算出し、算出された該信頼度に基づき前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理することを特徴とする。
【0011】
また、上記現在位置表示装置の発明の一態様において、
前記地図データベースは、前記傾斜判定手段が傾斜角度を算出すべき地点である第1検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第1検知地点付近にあるときに傾斜角度を算出し、算出した該傾斜角度に基づいて前記候補となるリンクに対する第1の信頼度を算出することを特徴とする。
【0012】
また、上記現在位置表示装置の発明の一態様において、
前記地図データベースは、前記第1検知地点に関連付けられた第2検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第2検知地点付近にあるときにさらに傾斜角度を算出し、算出した該傾斜角度に基づいて前記第1の信頼度を補正することを特徴とする。
【0013】
また、本発明の現在位置表示方法は、
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置における現在位置表示方法であって、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、
(1)前記現在位置検出手段によって仮想現在位置を検出するステップと、
(2)検出した角速度に基づいて前記傾斜判定手段が傾斜角度を算出するステップと、
(3)前記傾斜角度と前記地図データベースを参照して前記仮想現在位置付近のマップマッチングの候補となるリンクに対する信頼度を算出するステップと、
(4)前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理するステップと、
(5)前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示するステップと、
を備えることを特徴とする。
【発明の効果】
【0014】
本発明の現在位置表示装置によれば、下記に示すような優れた効果を奏する。
【0015】
すなわち、本発明の現在位置表示装置は、角速度の変化を検出する傾斜判定手段を備え、前記傾斜判定手段は、検出した角速度に基づいて傾斜角度を算出し、前記傾斜角度と前記地図データベースを参照して前記候補となるリンクに対する信頼度を算出し、算出された該信頼度に基づき前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理する。これにより、車両の傾きの変化を識別することで、精度良くマッチング処理を行い、現在位置をより正確にユーザに通知することができるようになる。
【0016】
また、本発明の一態様によれば、傾斜判定手段が傾斜角度を算出すべき第1検知地点、例えば高速道路等の本線と連結路がほぼ平行に設けられ、且つ、連結路が本線に対しわずかな分岐角度で設けられているような地点を記憶しておき、この地点に差し掛かったときに傾斜角度を算出し、さらにそれに基づいて候補となるリンクに対する信頼度を算出し、信頼度の高いリンク上にマッチング処理する。これにより、信頼度良くマッチング処理を行うことが可能となる。
【0017】
また、本発明の一態様によれば、傾斜判定手段が傾斜角度を算出すべき第1地点とそれに関連付けられた第2検知地点を示す情報を記憶しておき、傾斜判定手段は、仮想現在位置が第1検知地点と第2検知地点付近にあるときにそれぞれ傾斜角度を算出し、第1検知地点の信頼度に対して第2検知地点で算出された傾斜角度でもって信頼度を補正する。これにより、2箇所において傾斜角度を算出するから、1箇所で傾斜角度を算出して信頼度を求めていたときに比べてさらに精度よくマップマッチングを行うことが可能となる。
【0018】
また、本発明の現在位置表示方法によれば、上記の現在位置表示装置におけるのと同様に、精度良く現在位置の表示を行うことができるという効果を奏することが可能となる。
【図面の簡単な説明】
【0019】
【図1】本実施例に係るナビゲーション装置10の内部ブロック図を示す。
【図2】本実施例の地図データベース190に記憶されている道路データの説明図である。
【図3】本実施例のナビゲーション装置10における経路案内及び現在位置表示方法の動作を示すフローチャートである。
【図4】本実施例のナビゲーション装置10において、検出された傾きに基づいてマップマッチングを行う方法の概略説明図である。
【発明を実施するための形態】
【0020】
以下、本願発明を実施するための最良の形態を実施例と共に図1〜図4を参照して詳細に説明する。ただし、以下に示す実施例は、本発明の技術思想を具体化するための現在位置表示装置、及び現在位置表示方法としてナビゲーション装置を例示して説明するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の現在位置表示装置、及び現在位置表示方法にも等しく適用し得るものである。
【実施例1】
【0021】
図1は、本実施例に係るナビゲーション装置10の内部ブロック図を示している。図1に示されているように、ナビゲーション装置10は制御手段100、現在位置検出手段110、表示入力手段120、表示制御手段130、経路探索手段140、記憶手段150、経路案内手段160、傾斜判定手段170、マップマッチング手段180、地図データベース190を備えて構成されている。
【0022】
制御手段100は、CPU101、RAM102、ROM103を備えて構成されており、RAM102及び/又はROM103に記憶された制御プログラムをCPU101において実行することにより、下記に説明する各部の動作を制御・統括する。
【0023】
現在位置検出手段110は、GPS受信手段111を備えており、GPS受信手段111が所定の時間間隔で地球上空を周回している複数のGPS衛星から受信する時刻情報を含む電波(衛星信号)に基づき車両の位置情報(GPS測位位置)を算出する。
【0024】
現在位置検出手段110は、また、加速度センサ(図示せず)や、ジャイロスコープ112などの自律航法センサを備えることで、加速度センサ及びジャイロスコープ112からの出力に基づき、GPS受信手段111が受信した衛星信号に基づき算出した位置情報を補正することもできる。また、自律航法センサを備えることで、GPS衛星信号が受信できないトンネルや地下街、地下駐車場、建物内の駐車場、あるいは、高層ビル街などGPS衛星信号の反射によるマルチパスの影響を受ける場所でも、加速度センサやジャイロスコープ112からの出力によりナビゲーション装置10(車両)の位置を算出することができる。
【0025】
表示入力手段120は表示手段121と入力手段122より構成される。表示手段121は液晶表示ユニットであり、入力手段122は液晶表示ユニットの液晶画面上に取り付けられたタッチパネルである。表示手段121は、本実施例のナビゲーション装置10で表示される地図画像、案内経路を示す表示画像等を表示し、入力手段122はユーザにより操作されて、出発位置、目的位置等の経路探索条件の入力を行うのに用いられる。
【0026】
表示制御手段130は、記憶手段150に記憶された案内経路(後述)に沿って地図データベース190から抽出された地図画像を処理して表示手段121に表示したり、地図画像に案内経路を示す表示画像を重ねて表示手段121に表示したりするものである。
【0027】
経路探索手段140は、出発位置又は現在位置検出手段110によって検出された現在位置から表示入力手段120を用いてユーザが設定した目的位置に至る最適な経路(案内経路)を、地図データベース190に記憶されている地図情報を参照して探索するが、出発位置又は現在位置に対応する道路のノードから目的位置に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路として得る。
【0028】
記憶手段150は、表示入力手段120によってユーザが入力した出発位置や目的位置、また、経路探索手段140によって経路探索された案内経路を案内経路データとして記憶する。さらに、ジャイロスコープ112から出力された角速度に基づき傾斜判定手段170が算出したナビゲーション装置10の傾斜角度(車両の傾斜角度)を記憶する。
【0029】
なお、本実施例では、ナビゲーション装置10が車両に対して平行に設置されているものとし、以下の説明では、傾斜判定手段170が算出した傾斜角度を車両の傾斜角度として説明を行う。
【0030】
経路案内手段160は、記憶手段150に記憶された案内経路と、現在位置検出手段110によって検出された現在位置とに基づいて、表示制御手段130に地図データベース190から現在位置周辺の地図情報の抽出と案内経路を示す表示画像の表示を指示し、表示制御手段130は、抽出した地図画像に案内経路を示す表示画像を重ねて表示手段121に表示する。また、経路案内手段160は、ナビゲーション装置10がスピーカ等を備える場合には、経路案内の音声ガイダンスを放送するなどしてユーザが案内経路に沿って移動するのを助ける。なお、音声ガイダンスは、地図データベース190の道路データに対応付けられて地図データベース190等に記憶されていることが好ましい。
【0031】
傾斜判定手段170は、現在位置が道路データのノードに関連付けられた傾斜を検出すべき地点(検知地点)にあるか否かの判定を行い、現在位置が傾斜検知地点にあると判定した場合に、ジャイロスコープ112から出力された角速度データを所定時間積分することにより、車両の傾斜角度を算出し、記憶手段150に記憶する。
【0032】
さらに、傾斜判定手段170は、算出した傾斜角度と道路データのリンクに関連付けられた上り/下り属性を比較することによって、後述するマップマッチング手段180により特定されたマップマッチングの候補となるリンクに対する信頼度を算出する。ここで、マップマッチングの候補となるリンクとは、例えば、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行に設けられ、且つ、分岐路や進入路が本線に対しわずかな分岐角度で設けられていたりする場合は、本線と分岐路及び/又は進入路に対応したリンクを言う(図2で示す、ノードN3から分岐するリンクL3及びリンクL4)また、信頼度とは、マップマッチングの候補となるリンクのうちのどのリンクを走行している可能性が高いかを示す指標となる評価値であり。
【0033】
具体的には、図4(d)に示すように、傾斜角度と信頼度の変化値を対応付けたデータテーブルを記憶手段150等に設けておき、傾斜角度が算出された場合に、マップマッチングの候補となるリンクに対する信頼度を算出された傾斜角度に対応した信頼度の変化値だけ変化させる。例えば、リンク属性として「上り」が付加されたリンクと、「属性なし」のリンクがマップマッチングの候補となっている場合に、プラス3度の傾斜角度が算出された場合、図4(d)に示されるデータテーブルを参照して「属性なし」のリンクに対する信頼度を10%差し引く。つまり、「上り」が付加されたリンクと、「属性なし」のリンク、それぞれの評価値が予め100%に設定されていた場合、「属性なし」のリンクの評価値を10%差し引いて90%とする。これにより信頼度が高い「上り」が付加されたリンクに対し後述するマップマッチング手段180によるマップマッチング処理が行われる。
【0034】
また、傾斜判定手段170は、一度傾斜検出を行った後に再度傾斜検出を行う必要があるか否かを判定し、所定条件を満たす場合に再度傾斜角度を算出し、マップマッチングの候補となるリンクに対する信頼度を算出する。なお、所定条件とは最初に行った傾斜算出の際にマップマッチングの候補となるリンク(図2で示す、リンクL3とリンクL4)の信頼度の差が所定値以下の場合(どちらのリンクにマップマッチングするか決着がつかない場合)や、地図データベース190の道路データのノード属性に再度傾斜検出を行うべき地点(第2検知地点)が設定されている場合である。
【0035】
そして、再度傾斜検出を行う場合も同様にマップマッチングの候補となっているリンクに対する信頼度の算出を行う。
【0036】
なお、車両が第1検知区間を通過する際にジャイロスコープ112から出力される角速度データを正の角速度データとした場合、第2検知区間を通過する際に出力される角速度データは負の角速度データとなる。そこで、第2検地区間で角速度データが出力された場合、出力された角速度データの正負を反転させたうえで傾斜角度を求める。
【0037】
マップマッチング手段180は、現在位置検出手段110によって算出された現在位置を仮想現在位置とし、その仮想現在位置の近隣にあるマップマッチングの候補となるリンク、特に、本実施例では、本線に対応するリンクと、本線からわずかな傾斜角度で分岐している分岐路や進入路等に対応したリンクを特定する(図2で示す、ノードN3から分岐するリンクL3、L4)。次いでマップマッチング手段180は、仮想現在位置からそれらのリンクに垂線を下ろし、垂線とリンクの交点を実際の現在位置候補とし、仮想現在位置から現在位置候補までの距離に、これらマップマッチングの候補となるリンクに対する信頼度(傾斜判定手段170により算出)をそれぞれ加味して最も信頼度の高いリンク上の位置を実際の現在位置とする。つまり、本実施例では、仮想現在位置から現在位置候補までの距離に加え、傾斜判定手段170により算出されたマップマッチングの候補となるリンクに対する信頼度を総合させて実際の現在位置を特定することができるようになる。
【0038】
地図データベース190は、道路データ、建物データ、背景データ、テキストデータから構成される地図情報を保持している。
【0039】
道路データは、道路をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータから構成される。ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、交差点情報や交差点名称及び傾き検出地点(図2における第1検知地点、第2検知地点)であることを示す情報等のノード属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0040】
なお、図2における第2検知地点は、第1検知地点に対応した検知地点として対応づけられて記憶されている。
【0041】
また、リンクデータは、リンクの始点及び終点となるノード番号、高速道路や一般道や街路等を区別するための第一道路種別、さらに、それぞれの道路の本線や連結路を区別するための第2道路種別、さらに道路の傾斜をあらわす上り/下り属性、距離及び/又は所要時間、国道○号線のような道路名称、進行方向のデータを含んで構成される。上り/下り属性には、上記の情報に加えて道路の実際の勾配の情報が記憶されるようにしてもよい。リンクデータは上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0042】
建物データは、建物の少なくとも3点からなる位置座標(緯度・経度)、駅、ビル、民家等の建物の種別、表示色のデータを含んで構成される。また背景データは、海岸線、湖沼、河川形状、山林等の背景画像データとなる少なくとも3点からなる位置座標(緯度・経度)、表示色のデータを含んで構成される。
【0043】
テキストデータは、それぞれの地名や河川名等の文字(名称)、及びその座標(緯度・経度)のデータを含んで構成される。
【0044】
なお、上記のナビゲーション装置10は、地図データベース190をナビゲーショ装置10に内蔵したスタンドアロン型のものとして説明したが、本発明はこれに限定されることはない。例えば、ナビゲーション装置10に通信手段(図示せず)を設け、ナビゲーション装置10の外部の情報提供サーバ(図示せず)に接続して通信を行い、情報提供サーバに備えられた地図データベースから上記の案内経路に関連付けられた地図情報を取得するようにしてもよい。
【0045】
その場合、ナビゲーション装置10は出発地点又は現在地点と目的地点とを指定し、これを経路探索条件として情報提供サーバに送信し、経路探索を依頼する。情報提供サーバは経路探索手段が設けられており、ナビゲーション装置10から受信した出発地点又は現在地点と目的地点とを経路探索条件として経路探索を行い、探索結果をナビゲーション装置10へ送信する。
【0046】
次に、図2を参照して、本実施例の地図データベース190に記憶されている道路データについて詳細に説明する。なお、図2は本実施例の地図データベースに記憶されている道路データの説明図である。
【0047】
図2に示されるように、高速道路210にインターチェンジ211が設けられており、そこでは連結路212が分岐して一般道213に接続するような道路がある(図2(a))とする。その場合、道路データは、高速道路210の起点となるノードN1、高速道路210の中間地点のノードN2、インターチェンジ211における高速道路210と一般道213への連結路212との分岐点となるノードN3、高速道路210の終点となるノードN4、連結路212と一般道213の接続点であるノードN5、一般道213の終点となるノードN6、高速道路210に対応付けられたリンクL1~L3、高速道路から一般道にかけての連結路212に対応付けられたリンクL4、連結路212に接続された一般道213に対応付けられたリンクL5から構成される。
【0048】
さらに、連結路212に対応するリンクL4には上り/下り属性として「下り」が付加されている(図2(b))。これは、高速道路210から連結路212で分岐した後ある程度の傾斜で下っていき、一般道213に接続していることを表している。なお、上り/下り属性には、道路の実際の勾配の情報が含まれるようにしてもよい。
【0049】
また、上り/下り属性を備えているリンクL4の両端のノードN3、ノードN5にはその地点が傾きを検出すべき地点であることを示す第1検知地点(N3)、第2検知地点(N5)の情報が関連付けられている。
【0050】
次に、図3及び図4を参照して本実施例に係るナビゲーション装置10における現在位置表示方法について説明する。なお、図3は本実施例のナビゲーション装置10における経路案内及び現在位置表示方法の動作を示すフローチャートである。また、図4は、本実施例のナビゲーション装置10において、検出された傾きに基づいてマップマッチングを行う方法を示す概略説明図である。
【0051】
まず、ステップS301において、表示入力手段120を構成する入力手段122を介してユーザにより出発位置と目的位置が入力・設定される。そして、入力された出発位置、目的位置は記憶手段150に記憶される。
【0052】
次いでステップS302において、経路探索手段140が記憶手段150に記憶された出発位置と目的位置に基づき、地図データベース190を参照し、経路探索を行う。経路探索は、出発位置又は現在位置に対応する道路のノードから目的位置に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路とし、当該経路に属する道路のノードやリンクを案内経路データとして記憶手段150に記憶する。
【0053】
なお、上記において、ユーザが出発地点を特定しない場合には、現在位置検出手段110によって検出された現在位置から目的位置までの経路探索を行う。
【0054】
ステップS303において、経路案内手段160は経路案内を開始し、ステップS304において、現在位置検出手段110が現在位置を算出し、これを仮想現在位置とする。ステップS305において傾斜判定手段170は、地図データベース190の道路データに記憶されているノードデータの属性を参照することにより、仮想現在位置が傾斜を検知すべき地点にあるか否かを判定する。具体的には、自動車が高速道路210を走行しており、インターチェンジ211に差し掛かった場合、傾斜判定手段170はノードN3に関連付けられている第1検知地点の情報に基づき現在位置が傾斜を検知すべき地点に位置していることを判定する。なお、図2、図4では、傾斜を検知すべき地点ではなく、第1検知地点から所定距離範囲に及ぶ区間(第1検知区間)として示しており、この区間内において傾斜が算出される。なお、この第1検知区間の範囲は変更可能であり、任意に設定することもできる。
現在位置が傾斜を検出すべき地点にいないと判定された場合はステップS311の処理に進み、マップマッチング手段180が通常のマップマッチングを行い、経路案内が終了していなければステップS304の処理に戻る。
【0055】
ステップS305において現在位置が傾斜を検出すべき地点であると判定された場合、続くステップS306の処理に進む。なお、このとき、車両は図4において高速道路210と一般道213への連結路212との分岐点となるノードN3を通過し、ノードN3に接続されているリンクL3(本線)、L4(連結路)のどちらかを走行しようとしている状態に対応している。
【0056】
ステップS306において、傾斜判定手段170は、ジャイロスコープ112によって出力された角速度を所定時間積分することで車両の傾斜角度を求め、記憶手段150に記憶する。なお、角速度の積分計算はジャイロスコープ112自体に行わせてもよい。
【0057】
ステップS307において、傾斜判定手段170は、ステップS306の処理で求めた傾斜角度に基づいて、ノードN3に接続されたリンクL3、L4のそれぞれに対する走行信頼度を求める。具体的には、算出された傾斜角度と、リンクL3、L4に関連付けられた上り/下り属性を比較することによって信頼度を算出する。リンクに関連付けられた上り/下り属性に道路の勾配の情報が含まれている場合、傾斜判定手段170はこの勾配情報を、算出された傾斜角度と比較することにより、候補となるそれぞれのリンクL3、L4に対する信頼度を算出することもできる。
【0058】
続くステップS308において、傾斜判定手段170は再度傾斜角度を検出するか否かを判定する。具体的には、ステップS307において求められたそれぞれの候補となるリンクに対する信頼度の差が所定値に満たない場合、再度傾斜角度検出を行うと判断する。或いは、地図データベース190の道路データのノード属性を参照し、第2検知地点が設定されている場合に再度傾斜角度の検出を行うこともできる。
【0059】
例えば、ノードN3において第1検知地点であることが検出された場合、傾斜判定手段170はそれに続くリンクの端点となるノードN4、N5に第2検知地点、つまり、第1検知地点に関連付けられた第2の検知地点が設けられているか否かを判定し、第2検知地点がない場合はステップS311の処理に進み、マップマッチング手段180は候補となるリンクのうちより信頼度の高いリンク上にマップマッチング処理を行う。
【0060】
第2検知地点がある場合はステップS309の処理に進む。なお、実際には傾斜を検知すべきなのは、第2検知地点から手前の所定距離範囲に及ぶ区間であり、図4では第2検知区間として示している。この第2検知区間の範囲は変更可能であり、任意に設定することもできる。
【0061】
ステップS309において、連結路212付近を走行中であるとみなされ、仮想現在位置が第2検知区間に差し掛かると、傾斜判定手段170は、ジャイロスコープ112から出力された角速度を所定時間積分することで車両の傾斜角度を求める。
【0062】
なお、車両がインターチェンジ211において本線から連絡路212に分岐して走行している場合、ノードN3から始まる第1検知区間を通過する際にジャイロスコープ112から出力される角速度データを正の角速度とした場合、ノードN5に至る第2検知区間を通過する際に出力される角速度データは負の角速度データとなる。そこで、第2検地区間で出力された角速度データの正負を反転させたうえで傾斜角度を求める。
【0063】
続くステップS310において、傾斜判定手段170は、新たに測定した傾斜角度に基づいて該当するリンクL3、L4のそれぞれに対する走行信頼度を補正する。この走行信頼度の補正は、第1検知地点で得られた信頼度が低い場合にのみ行ってもよいし、第1検知地点で求められた信頼度に、第2検知地点で求められた信頼度を加算することによって行ってもよい。
【0064】
ステップS311において、マップマッチング手段180は、仮想現在位置から現在位置候補までの距離に、上記の方法で求められた傾斜角度に基づく信頼度を加味し、総合的に信頼度の高いほうのリンクを走行リンクとして特定し、現在位置を特定されたリンクの所定位置にマップマッチングし、表示制御手段130は、表示手段121に地図画像とともに案内画像を表示する。
【0065】
ステップS312において、経路案内手段160は、マップマッチングされた現在位置が目的位置か否かを判定することによって経路案内を終了すべきか判定する。目的位置に到達しているなら、経路案内を終了する。目的位置に達していない場合は、ステップS304の処理に進む。
【0066】
上記の方法により、高速道路の本線と一般道への連結路である分岐路や進入路がほぼ平行、且つ、わずかな分岐角度で設けられているような場合に、ナビゲーション装置に内蔵されたジャイロスコープの角速度の出力を用いて車両の傾き角度を検出し、その傾き角度から関係するリンクに対する信頼度を算出し、より信頼度の高いものを走行リンクとして特定し、現在位置をそのリンク上にマップマッチングすることにより、マッチングの精度を向上することが可能となる。
【0067】
さらに、車両の傾き角度を第1の検知地点において検出した場合に、第1検知地点に関連付けられた第2の地点においても車両の傾き角度を検出し、第1検出地点で求められた信頼度を補正し、信頼度の高いものを走行リンクとして特定し、現在位置をそのリンク上にマップマッチングする。これにより、より精度の高いマップマッチングすることが可能となる。
【0068】
なお、上記の実施例では、本発明の現在位置表示装置としてナビゲーション装置を例示し、出発位置と目的位置を指定し、経路探索を行って得られた経路に沿って経路案内を行う場合を示したが、本発明はこれに限定されない。例えば、経路案内は行わず、現在位置検出手段110によって検出された現在位置を対応する地図上に表示するような場合にも適合することができる。
【0069】
また、本実施例では、ジャイロスコープ112の出力に基づき傾斜判定手段170が車両の傾斜角度を算出するように記載したが、これに限るものではなく、例えば、加速度センサや傾斜センサ等の出力を用いて傾斜角度を算出できるのであれば、これら各種センサの出力を用いて算出しても構わない。
【符号の説明】
【0070】
10 ナビゲーション装置
100 制御手段
110 現在位置検出手段
112 ジャイロスコープ
120 表示入力手段
130 表示制御手段
140 経路探索手段
150 記憶手段
160 経路案内手段
170 傾斜判定手段
180 マップマッチング手段
190 地図データベース
【特許請求の範囲】
【請求項1】
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備え、前記マップマッチング手段が前記現在位置検出手段によって検出された仮想現在位置を、前記地図データベースから特定したマップマッチングの候補となるリンク上に実際の現在位置としてマッチング処理し、前記実際の現在位置を前記表示制御手段が前記表示手段に地図画像とともに表示する現在位置表示装置において、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、前記傾斜判定手段は、検出した角速度に基づいて傾斜角度を算出し、前記傾斜角度と前記地図データベースを参照して前記候補となるリンクに対する信頼度を算出し、算出された該信頼度に基づき前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理することを特徴とする現在位置表示装置。
【請求項2】
前記地図データベースは、前記傾斜判定手段が傾斜角度を算出すべき地点である第1検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第1検知地点付近にあるときに傾斜角度を算出し、算出した該傾斜角度に基づいて前記候補となるリンクに対する第1の信頼度を算出することを特徴とする請求項1に記載の現在位置表示装置。
【請求項3】
前記地図データベースは、前記第1検知地点に関連付けられた第2検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第2検知地点付近にあるときにさらに傾斜角度を算出し、算出した該傾斜角度に基づいて前記第1の信頼度を補正することを特徴とする請求項2に記載の現在位置表示装置。
【請求項4】
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置における現在位置表示方法であって、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、
(1)前記現在位置検出手段によって仮想現在位置を検出するステップと、
(2)検出した角速度に基づいて前記傾斜判定手段が傾斜角度を算出するステップと、
(3)前記傾斜角度と前記地図データベースを参照して前記仮想現在位置付近のマップマッチングの候補となるリンクに対する信頼度を算出するステップと、
(4)前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理するステップと、
(5)前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示するステップと、
を備えることを特徴とする現在位置表示方法。
【請求項1】
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備え、前記マップマッチング手段が前記現在位置検出手段によって検出された仮想現在位置を、前記地図データベースから特定したマップマッチングの候補となるリンク上に実際の現在位置としてマッチング処理し、前記実際の現在位置を前記表示制御手段が前記表示手段に地図画像とともに表示する現在位置表示装置において、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、前記傾斜判定手段は、検出した角速度に基づいて傾斜角度を算出し、前記傾斜角度と前記地図データベースを参照して前記候補となるリンクに対する信頼度を算出し、算出された該信頼度に基づき前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理することを特徴とする現在位置表示装置。
【請求項2】
前記地図データベースは、前記傾斜判定手段が傾斜角度を算出すべき地点である第1検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第1検知地点付近にあるときに傾斜角度を算出し、算出した該傾斜角度に基づいて前記候補となるリンクに対する第1の信頼度を算出することを特徴とする請求項1に記載の現在位置表示装置。
【請求項3】
前記地図データベースは、前記第1検知地点に関連付けられた第2検知地点を示す情報を記憶しており、前記傾斜判定手段は、前記仮想現在位置が前記第2検知地点付近にあるときにさらに傾斜角度を算出し、算出した該傾斜角度に基づいて前記第1の信頼度を補正することを特徴とする請求項2に記載の現在位置表示装置。
【請求項4】
現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置における現在位置表示方法であって、
前記現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段を備え、
(1)前記現在位置検出手段によって仮想現在位置を検出するステップと、
(2)検出した角速度に基づいて前記傾斜判定手段が傾斜角度を算出するステップと、
(3)前記傾斜角度と前記地図データベースを参照して前記仮想現在位置付近のマップマッチングの候補となるリンクに対する信頼度を算出するステップと、
(4)前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理するステップと、
(5)前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示するステップと、
を備えることを特徴とする現在位置表示方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−226950(P2011−226950A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−97762(P2010−97762)
【出願日】平成22年4月21日(2010.4.21)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月21日(2010.4.21)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]