
現在位置表示装置
【課題】GPS信号を再度受信した際に、GPS信号に基づく現在位置と、表示位置とが離れている場合に、スムーズにその誤差を解消して表示すること。
【解決手段】表示手段と、GPS受信手段と、前記GPS受信手段において受信されたGPS信号に基づいて現在位置を算出する現在位置算出手段と、前記GPS信号が受信できなくなる前に、前記現在位置算出手段により算出された現在位置に基づいて前記表示手段に表示される現在位置マークの位置を決定する表示位置決定手段と、を備える現在位置表示装置において、前記現在位置表示装置は、位置比較手段を備え、前記GPS受信手段が前記GPS信号を受信できない場合に、前記位置比較手段により前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であると判定された場合、前記現在位置マークを、前記GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示する。
【解決手段】表示手段と、GPS受信手段と、前記GPS受信手段において受信されたGPS信号に基づいて現在位置を算出する現在位置算出手段と、前記GPS信号が受信できなくなる前に、前記現在位置算出手段により算出された現在位置に基づいて前記表示手段に表示される現在位置マークの位置を決定する表示位置決定手段と、を備える現在位置表示装置において、前記現在位置表示装置は、位置比較手段を備え、前記GPS受信手段が前記GPS信号を受信できない場合に、前記位置比較手段により前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であると判定された場合、前記現在位置マークを、前記GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は現在位置表示装置、より詳細には、トンネル等のGPS信号を受信できない区間からGPS信号を受信できる区間に移動した際に生じる現在位置の表示位置のずれを解消する表示を行う現在位置表示装置に関する。
【背景技術】
【0002】
自動車等の誘導案内に使用されるカーナビゲーション装置は、GPS衛星からの信号を受信することによって車両の現在位置を特定し、特定された現在位置を地図上に表示してユーザに案内するものである。また、出発地と目的地を経路探索条件として入力し、この経路探索条件を満たすように経路探索を行うことによってその間の最適経路を特定し、最適経路を地図上に表示し、この経路に沿って経路案内を行っている。
【0003】
また、多くのカーナビゲーション装置においては、GPS信号による現在位置の測位に加え、自動車等に設置された車速センサやジャイロスコープ等の自律航法手段と連携することによって現在位置をさらに正確に検出することが行われている。自律航法手段を使用することにより車両が走行した距離や方向を詳細に検出することができる。これにより、現在位置特定の精度を向上でき、また、トンネルやビルの谷間等GPS信号が受信できないところでも現在位置を特定することができる。
【0004】
下記特許文献1(特開平06−317650号公報)は、GPS信号を受信できないときに、現在位置がトンネル内かどうかを判定し、トンネル内であるときは画面上のトンネルの表示を強調するナビゲーション装置を開示している。
【0005】
また、下記特許文献2(特開平05−010774号公報)は、GPS受信機と地磁気センサと加速度センサを備え、GPS衛星からの情報を受信できないときに、加速度センサと地磁気センサからの情報を使用して現在位置を特定するナビゲーション装置を開示している。これにより、トンネルやビルの谷間においてGPS信号が受信不可能な場合でも途切れることなく現在位置を特定してナビゲーション装置の表示部に表示することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平06−317650号公報
【特許文献2】特開平05−010774号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、ナビゲーション装置を搭載した自動車等の車両がトンネル等のGPS信号を受信できない経路を走行する場合、上記特許文献1のようなナビゲーション装置であれば、現在位置の表示は、GPS信号を受信できたトンネルの手前で一旦停止し、トンネル走行中はトンネルの表示が強調され、その後GPS信号を再受信するトンネルの出口で再開されることになり、自車の現在位置をトンネル内での位置を含めて連続的に表示することはできない。
【0008】
また、上記特許文献2のようなナビゲーション装置であれば、トンネル走行中は、地磁気センサや加速度センサの出力に基づいてトンネル内の現在位置を特定して地図上に表示することができるが、地磁気センサや加速度センサの出力に含まれる誤差によって車両の実際の位置と表示されている位置がずれてしまうことがある。また、トンネル内で急激な加減速がある場合は、特に車両の実際の位置とナビゲーション装置が算出した位置との差はより大きくなる。この差は、車両がトンネルから出て、再びGPS信号を受信し、GPS信号に基づいた現在位置に現在位置表示を修正することで改善されるが、その際に、いきなり自車の現在位置が飛んだような(スキップしたような)表示になってしまう。
【0009】
すなわち、ナビゲーション装置が加速度センサなどの出力に基づき算出した位置が実際の車両の位置より遅れている場合に、車両がトンネルを出た際のGPS信号に基づいた現在位置に現在位置表示を修正すると、遅れた距離だけ現在位置表示が変動するため、いきなり自車の現在位置が飛んだような(スキップしたような)表示になってしまう。
【0010】
また、ナビゲーション装置が加速度センサなどの出力に基づき算出した位置が実際の車両の位置より先走りしている場合には、表示している現在位置が先にトンネル出口に到達してしまいユーザに違和感を与えてしまうと共に、GPS信号が受信できないため現在位置の表示がトンネル出口で停止してしまい、ユーザに不信感を与えてしまうといった問題がある。
【0011】
そこで、本発明は、GPS信号を受信できない区間を通行している際に、GPS信号を再び受信できる位置に近づいたと推測される際に、実際の位置と現在位置表示との誤差をスムーズに解消して表示する現在位置表示装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するために、本願請求項1にかかる発明は、表示手段と、GPS受信手段と、前記GPS受信手段において受信されたGPS信号に基づいて現在位置を算出する現在位置算出手段と、前記GPS信号が受信できなくなる前に、前記現在位置算出手段により算出された現在位置に基づいて前記表示手段に表示される現在位置マークの位置を決定する表示位置決定手段と、を備える現在位置表示装置において、前記現在位置表示装置は、位置比較手段を備え、前記GPS受信手段が前記GPS信号を受信できない場合に、前記位置比較手段により前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であると判定された場合、前記現在位置マークを、前記GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示することを特徴とする。
【0013】
また、本願請求項2にかかる発明は、請求項1にかかる発明において、前記現在位置表示装置は、自律航法手段を備え、前記現在位置算出手段は、前記GPS受信手段が前記GPS信号を受信できない場合、前記GPS信号が受信できなくなる前に算出した現在位置及び前記自律航法手段の出力に基づいて現在位置を算出し、前記表示位置決定手段は、該算出された現在位置に基づいて前記現在位置マークの位置を決定することを特徴とする。
【0014】
また、本願請求項3にかかる発明は、請求項1又は2にかかる発明において、前記現在位置表示装置は、GPS信号を受信できる位置を含む地図情報を記憶する地図記憶手段を備え、前記位置比較手段は、前記地図情報を参照し、前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であるか否かを判定することを特徴とする。
【0015】
また、本願請求項4にかかる発明は、請求項1乃至3にかかる発明において、前記表示手段に表示されている地図の縮尺に応じて、前記現在位置マークを、前記現在位置GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示するか否かを切り換えることを特徴とする。
【0016】
また、本願請求項5にかかる発明は、請求項1乃至4にかかる発明において、前記表示手段に表示されている地図の縮尺に応じて、前記所定距離の値を変動させることを特徴とする。
【発明の効果】
【0017】
本願請求項1にかかる発明によると、GPS信号が受信できない場合に、現在位置マークの位置とGPS信号を再度受信できる位置とが所定距離以内であると判定された場合、現在位置マークを、GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される現在位置マークの位置より進行方向に対し後方に表示するため、表示している現在位置マークが先にトンネル出口に到達してしまいユーザに違和感を与えてしまうことを防止することができる。
【0018】
また、本願請求項2にかかる発明によると、GPS信号を受信できない場合、GPS信号が受信できなくなる前に算出した現在位置及び自律航法手段の出力に基づいて現在位置を算出し、該算出された現在位置に基づいて現在位置マークの位置を決定するため、トンネルなどのGPS信号を受信できない場合でも、現在位置を算出して、表示することができる。
【0019】
また、本願請求項3にかかる発明によると、GPS信号を受信できる位置を含む地図情報を記憶する地図記憶手段を備えているため、現在位置マークの位置とGPS信号を再度受信できる位置とが所定距離以内であるか否かを正確に判定できる。
【0020】
また、本願請求項4にかかる発明によると、表示手段に表示されている地図の縮尺に応じて、現在位置マークを、GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される現在位置マークの位置より進行方向に対し後方に表示するか否かを切り換えるため、地図が広域のときなど、本発明の効果が得られにくいときは、本発明の処理を行なわず、無駄な処理を行なうことがなくなる。
【0021】
また、本願請求項5にかかる発明によると、表示手段に表示されている地図の縮尺に応じて、所定距離の値を変動させるため、地図が広域のときなど、本発明の効果が得られにくいときは、無駄な処理を行なうことが少なくなり、且つ、地図が詳細のときなど、本発明の効果が顕著に得られる際には、確実に、本発明の処理を行なうことが可能となる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施例に係るナビゲーション装置10の内部ブロック図である。
【図2】本実施例にかかるナビゲーション装置10におけるトンネル出口付近での現在位置の表示動作を示すフローチャートである。
【図3】図2に続くフローチャートである。
【図4】図2及び図3のフローチャートに従ってナビゲーション装置10がンネル出口付近において行う表示位置の修正の概念図である。
【図5】本実施例にかかるナビゲーション装置10におけるトンネル出口付近において、現在位置表示が実際の自動車の位置よりも進んでいる場合の現在位置の表示動作を示すフローチャートである。
【図6】図5のフローチャートに従ってナビゲーション装置10がトンネル出口付近において行う表示位置の修正の概念図である。
【発明を実施するための形態】
【0023】
以下、本願発明を実施するための最良の形態を実施例と共に図1〜図6を参照して詳細に説明する。ただし、以下に示す実施形態は、本発明の技術的思想を具体化するためのナビゲーション装置を例示して説明するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の現在位置表示装置にも等しく適用し得るものである。
【実施例】
【0024】
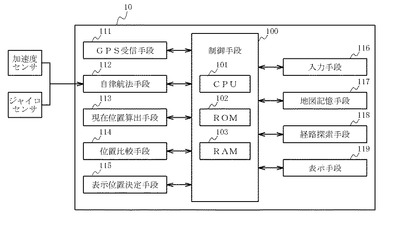
最初に、図1を参照して本発明の実施例に係るナビゲーション装置10について説明する。なお、図1は、本発明の実施例に係るナビゲーション装置10の内部ブロック図である。
【0025】
ナビゲーション装置10は、制御手段100、GPS受信手段111、自律航法手段112、現在位置算出手段113、位置比較手段114、表示位置決定手段115、入力手段116、地図記憶手段117、経路探索手段118、表示手段119を備えて構成される。
【0026】
制御手段100は、CPU101、ROM102、RAM103を含むマイクロプロセッサから構成され、ROM102に記憶されたプログラムをCPU101において実行することによりナビゲーション装置10の各部の動作を制御する。
【0027】
GPS受信手段111は、地球上空を周回している複数のGPS衛星から、各GPS衛星の位置情報及び時刻情報を含むGPS信号を受信するアンテナなどを含んで構成される。GPS信号には、アルマナックデータ及びエフェメリスデータの2種類のデータが含まれる。アルマナックデータは、全GPS衛星の軌道情報及び衛星時計の補正情報を含み、エフェメリスデータは、各GPS衛星の詳細な位置情報及びGPS信号を発射した時刻情報を含む。
【0028】
自律航法手段112は、ナビゲーション装置10が搭載される車両に設置された加速度センサ、ジャイロセンサ等に接続され、センサからの検出信号を適切な出力信号に変換する。なお、加速度センサ、ジャイロセンサ等のセンサはナビゲーション装置10が備えてもよい。
【0029】
現在位置算出手段113は、GPS受信手段111において受信したアルマナックデータ及びエフェメリスデータに基づき、緯度情報及び経度情報からなる車両の推定現在位置(GPS信号に基づく推定現在位置)を算出する。
【0030】
現在位置算出手段113は、一般的には、所定の時間間隔、例えば、本実施例では1秒間隔でGPS信号に基づく推定現在位置を算出する。そして、現在位置算出手段113は、今回算出した推定現在位置と前回算出した推定現在位置に基づいて、車両の角速度、加速度および速度などを算出することが可能である。従って、現在位置算出手段113により1秒に1回、車両の現在位置、速度、角速度、加速度等の値が算出される。
【0031】
現在位置算出手段113は、さらに、自律航法手段112において変換出力された加速度センサの出力、ジャイロセンサの出力に基づいて、推定現在位置(自律航法手段112に基づく推定現在位置)を算出する。例えば、本実施例の自律航法手段112においては、10msec毎に角速度、加速度を検出し、100msec毎に、10msec毎に検出した角速度、加速度(それぞれ10個のデータ)の平均値を算出して、さらに、100msec毎に算出された角速度、加速度の平均値の10個のデータを用いて移動平均し、車両の角速度、加速度とする処理を行う。100msec毎の移動平均値算出処理にあたっては、100msec毎に得られる最新の10個のデータを用いて、(1番目のデータを削除し、11番目のデータを採用する)それらの平均値を100msec毎に算出する。
【0032】
そして、現在位置算出手段113は、GPS信号に基づく推定現在位置を基準とし、自律航法手段112により算出された角速度、加速度を用いることにより自律航法手段112に基づく推定現在位置を算出する。
【0033】
ここで、本実施例においては、GPS信号に基づく推定現在位置は1秒間隔であり、自律航法手段112により算出される角速度、加速度は100msec間隔であるため、GPS信号に基づく推定現在位置の算出中(1秒間中)の車両の位置を自律航法手段112に基づいて算出することで、車両の位置の更新間隔が短くなり、車両の位置特定の精度が向上する。
【0034】
なお、自律航法手段112に基づく推定現在位置を連続して算出する場合は、前回算出した自律航法手段112に基づく推定現在位置を基準とし、自律航法手段112により算出された角速度、加速度を用いることにより自律航法手段112に基づく推定現在位置を算出することが好ましい。
【0035】
このように現在位置算出手段113は、GPS受信手段111および自律航法手段112によって車両の現在位置を算出するが、その他にも、上記GPS信号を受信して算出した推定現在位置と前回算出した推定現在位置から算出される車両の速度が時速20km/h以下ではGPS受信手段111による推定現在位置が用いられ、時速20km/hを上回ると自律航法手段112による推定現在位置が用いられるように構成してもよく、さらに、GPS受信手段111による推定現在位置と自律航法手段112による推定現在位置の差が所定以上であった場合には、自律航法手段112による推定現在位置をGPS受信手段111による推定現在位置にオフセットするように構成してもよい。
【0036】
また、地下通路やトンネルなどGPS信号の受信が不可能でGPS信号に基づく推定現在位置が算出できない場所を走行している場合、あるいは、マルチパスの影響によりGPS受信手段111による測位結果に大きな誤差か生じるビル街などを走行している場合には、GPS受信手段111に基づく推定現在位置を採用せず、自律航法手段112による推定現在位置を用いるように構成される。また、逆にジャイロセンサ、加速度センサの誤差により自律航法手段112による推定現在位置に大きな誤差が生じる場合には、GPS受信手段111に基づく推定現在位置が用いられる。
【0037】
位置比較手段114は、トンネル等のGPS信号を受信できない区間を走行した後に再びGPS信号を受信できるようになった場合、GPS信号に基づく推定現在位置と、それまでの現在位置表示420(図4参照)の位置(自律航法手段112の出力に基づいて後述する表示位置決定手段115によって特定された現在位置の表示位置)とを比較し、両者がどの程度の距離だけ離れているかを判定するものである。すなわち、トンネル等のGPS信号を受信できない区間を走行している場合は、上述の通り、自律航法手段112に基づく推定現在位置が採用されているため、自律航法手段112に基づく推定現在位置に基づいて現在位置表示420の表示を行なっている。そして、その際に、再びGPS信号を受信できるようになった場合、GPS信号に基づく推定現在位置と、現在位置表示420の位置との距離を判定する。
【0038】
また、位置比較手段114は、後述する表示手段119に表示されている現在位置表示420の位置と後述する地図記憶手段117に記憶されている地図情報を比較することによって車両がトンネル内を走行しているか否かを判定する。また、位置比較手段114は、現在位置表示420の位置とトンネル出口位置との距離を判定する。
【0039】
表示位置決定手段115は、現在位置表示420を表示する位置を決定する手段であり、特に、位置比較手段114において、自律航法手段112に基づく推定現在位置とGPS信号に基づく推定現在位置とが所定距離以上離れていると判定された場合に、現在位置表示420を表示する位置を、現在、表示している位置からGPS信号に基づく推定現在位置へと段階的に近づくように移動させる。表示位置決定の具体的な方法は後述する。
【0040】
入力手段116は、車両のドライバ等によって操作される各種キー、スイッチ、タッチパネル等から構成されるものであり、例えば、ナビゲーション装置10を用いて目的地までの経路案内を行う場合、出発地、目的地、経由地等を入力するためのものである。
【0041】
地図記憶手段117は、道路の分岐地点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータと縮尺の異なる複数の地図画像を含む地図情報を記憶する。道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が含まれる他、分岐地点から所定距離だけ離れた案内地点において、右左折、直進等の経路案内を行う経路案内データ及び案内地点の位置座標が記憶される。
【0042】
また、道路リンクデータには、始点及び終点となる道路ノード番号、道路種別、ノード間の距離情報であるリンク長(リンクコスト)、所要時間、車線数、車道幅などが含まれる。道路リンクデータには、さらに、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。道路種別とは、高架道路と高架下道路との別、高速道路や有料道路の別、国道や都道府県道等の別を含む情報である。
【0043】
さらに、地図記憶手段117には、海岸線、湖沼、河川形状などの水系データ、行政境界データ、駐車場をはじめとする施設位置、施設形状、施設名称などを含む施設データからなる背景データが記憶されている。
【0044】
さらに、地図記憶手段117には、車両の走行路や目的地までの案内経路、目的地までの走行距離、走行時間を示すための地図情報が記憶される。また、地図情報は、トンネルやビル街、地下道路などのGPS信号が受信できない場所が識別されており、さらにトンネルの出入口、地下道路の出入口などGPS信号が受信できなくなる位置、或いは、GPS信号が受信可能になる位置も含まれる。なお、GPS信号が受信できる場所か否かの情報は、車両がその場所を通過した際に、GPS信号を受信できたか否かを判別し、判別結果を反映して、更新するように構成してもよい。
【0045】
経路探索手段118は、ユーザが入力手段116を用いて目的地を入力すると、地図記憶手段117に記憶されている地図情報を参照し、現在位置又はユーザによって指定された出発地から目的地に至る最適な案内経路を探索するものである。
【0046】
案内経路の探索は、現在位置又は出発地に対応する道路ノードから目的地に対応する道路ノードまでに至るリンクとノードをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長(走行距離)又は総所要時間等が最短となる経路を案内経路とし、当該経路に属する道路ノードやリンクを案内経路データとして提供するものである。
【0047】
表示手段119は、地図画像や案内経路画像、車両の現在位置を示すマーク(本実施例では現在位置表示420)等を表示してユーザが視認できるようにするためのものであり、液晶ディスプレイなどで構成される。なお、この表示手段119は、タッチセンサを備えた入力手段116として機能させてもよい。この場合、ディスプレイ上に表示されたアイコンをユーザが触れることで選択入力が行われる。
【0048】
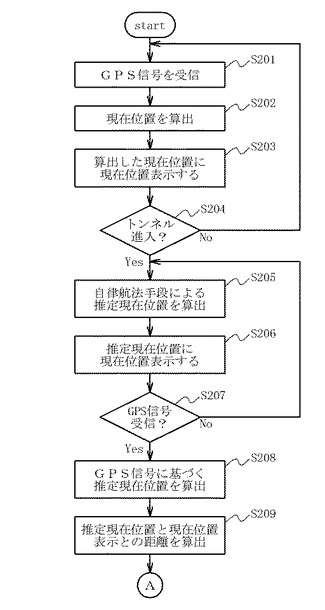
次に、本発明のナビゲーション装置10における現在位置の表示について、図2〜図6を参照して説明する。図2及び図3は、本実施例にかかるナビゲーション装置10におけるトンネル出口付近での現在位置の表示動作を示すフローチャートである。図4は、図2のフローチャートに従ってナビゲーション装置10がトンネル出口付近において行う表示位置の修正の概念図である。図5は、本実施例にかかるナビゲーション装置10におけるトンネル出口付近において、現在位置表示420が実際の自動車の位置よりも進んでいる場合の現在位置の表示動作を示すフローチャートであり、図6は、図5のフローチャートに従ってナビゲーション装置10がトンネル出口付近において行う表示位置の修正の概念図である。なお、以下の説明では、車両の例として自動車410(図4参照)を用いて説明する。
【0049】
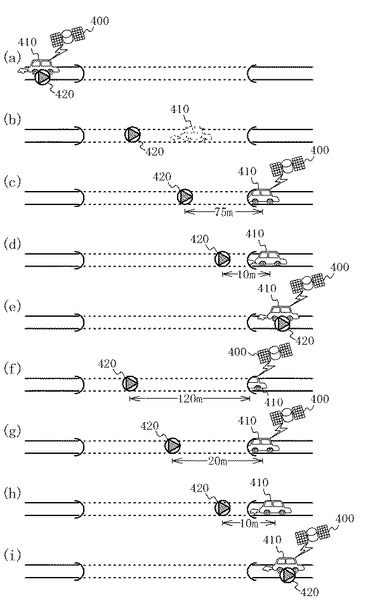
まず、図4(a)に示すように、本実施例のナビゲーション装置10を搭載した自動車410がGPS衛星400からのGPS信号を受信できる道路を走行している場合について考える。なお、図4にはGPS衛星400は1機しか描かれていないが、実際には複数存在する。
【0050】
ステップS201において、GPS受信手段111はGPS衛星400からGPS信号を受信する。次いでステップS202において、現在位置算出手段113は、受信したGPS信号に基づいて推定現在位置を算出する。なお、このとき、自動車410に搭載された加速度センサやジャイロセンサ等の自律航法手段112の出力信号に基づいて、現在位置算出手段113は自律航法手段112に基づく推定現在位置を算出してもよい。
【0051】
ステップS203においては、表示位置決定手段115が現在位置算出手段113において算出されたGPS信号に基づく推定現在位置に基づいて現在位置を表示する位置を決定し、現在位置表示420を表示手段119に表示する。図4(a)では、現在位置表示420として進行方向を三角形で示し、それを円で囲んだマークを用いている。この現在位置表示420は、自動車410の実際の位置と略同一の位置に表示されている。
【0052】
次いで、ステップS204において、自動車410がトンネルに進入したか否かを判別する。これは、位置比較手段114が、表示手段119に表示された現在位置表示420の位置と地図記憶手段117に記憶されている地図情報とを比較することによって判定される。
また、その他にも、トンネル付近でGPS信号が受信できなくなった場合、トンネルに進入したと判定することも可能である。トンネル内に進入したと判定されなかった場合、ステップS201の処理に戻り、ステップS201〜ステップS204の処理を繰り返し行う。
【0053】
ステップS204において、自動車410がトンネルに進入したと判別された場合、ステップS205の処理に進む。この状態が図4(b)に示されている。このとき、自動車410のGPS受信手段111はGPS衛星400からのGPS信号を受信することができない。そこでステップS205では、現在位置算出手段113が自律航法手段112に基づく推定現在位置を算出することでトンネル内の自動車410の現在位置を算出する。続くステップS206では、表示位置決定手段115が自律航法手段112に基づく推定現在位置を自動車410の現在位置として現在位置表示420の表示を行う。図4(b)では、実際の自動車410の位置から少しずれた位置に現在位置表示420が表示されているが、これは、加速度センサやジャイロセンサの誤差によって生じるものである。この誤差は、経年変化や温度による誤差、道路の勾配や路面状態による誤差、加速度センサやジャイロセンサを備えたポータブルナビゲーションなどであれば取り付け角度などの取り付け方による誤差など、様々な要因が考えられる。
【0054】
なお、ナビゲーション装置10が自律航法手段112を備えておらず、加速度センサやジャイロセンサ等が搭載されていない場合には、トンネルに進入する前に算出されたGPS信号に基づく推定現在位置とその前のGPS信号に基づく推定現在位置とに基づき現在位置算出手段113がトンネル進入時の自動車410の速度を算出し、表示位置決定手段115が算出された速度に基づき自動車410のトンネル内の現在位置を決定するようにしてもよい。
【0055】
ステップS207において、GPS受信手段111はGPS信号を受信したか否かを判別する。GPS信号を受信しない場合は、ステップS205〜S207の処理を繰り返し行う。ステップS207において、GPS信号を受信したと判別された場合、ステップS208の処理に進む。
【0056】
ステップS208において、GPS受信手段111がGPS衛星400から受信したGPS信号に基づき、現在位置算出手段113がGPS信号に基づく推定現在位置を算出する。次いでステップS209において、位置比較手段114は、表示手段119に表示されている現在位置表示420の位置と、S207で受信したGPS信号に基づく推定現在位置とを比較し、その距離を算出する。
【0057】
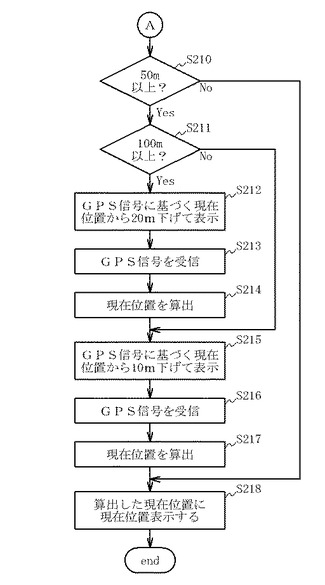
図3のステップS210において、現在位置表示420の位置とGPS信号に基づく推定現在位置との差が50m以上か否かを判別し、50m未満の場合には、ステップ218の処理に進み、50m以上の場合にはステップS211の処理に進む。ステップS211では、さらに、現在位置表示420の位置とGPS信号に基づく推定現在位置との差が100m以上か否かを判別する。
【0058】
図4(c)の場合、自動車410がトンネル出口に差し掛かったところでGPS衛星400からのGPS信号を受信することができた。これまで自動車410は、自律航法手段112に基づく推定現在位置に基づいて現在位置表示420の表示を行ってきたが、ここでGPS信号に基づく推定現在位置を得ることができ、図4(c)では、トンネル出口のところにGPS信号に基づく推定現在位置を得ることができる。しかしながら、このときの現在位置表示420の位置は、GPS信号に基づく推定現在位置から75m遅れた位置ある。この場合、ステップS210、ステップS211の処理において、現在位置表示420の位置とGPS信号に基づく現在位置との差が50m以上100m以内であるから、処理はステップS215に進む。
【0059】
ステップS215では、表示位置決定手段115が現在位置表示420を表示する位置を、GPS信号に基づく推定現在位置から10m後方にずらした位置に決定し、表示手段119に表示する。このときの自動車410のGPS信号に基づく現在位置と表示手段119に表示される現在位置表示420の位置との関係が図4(d)に示されている。図4(d)では、GPS信号に基づく推定現在位置から10m後方に現在位置表示420が表示されている。
【0060】
続くステップS216では、GPS受信手段111がGPS衛星400からのGPS信号を受信し、ステップS217において現在位置算出手段113がGPS信号に基づく新たな推定現在位置を算出し、ステップS218において算出された推定現在位置を現在位置とし、表示手段119に現在位置表示420として表示する。このときの状態が図4(e)に示されている。図4(e)では、GPS信号に基づく推定現在位置と現在位置表示420とが同一の位置に表示されている。
【0061】
ステップS210及びステップS211において、現在位置表示420の位置とGPS信号に基づく推定現在位置との差が100m以上であると判定された場合、処理はステップS212に進む。なお、この状況が図4(f)に示されている。図4(f)では、自動車410がトンネル出口に差し掛かったときにGPS衛星400からのGPS信号を受信でき、GPS信号に基づく推定現在位置をトンネル出口のところに得ることができるが、現在位置表示420の位置は、GPS信号に基づく推定現在位置から120m遅れた位置にある。
【0062】
ステップS212において、表示位置決定手段115が現在位置表示420を表示する位置を、GPS信号に基づく推定現在位置から20m後方にずらした位置に決定し、表示手段119に表示する。このときの自動車410のGPS信号に基づく推定現在位置と表示手段119に表示された現在位置表示420の位置との関係が図4(g)に示されている。図4(g)では、自動車410の位置(GPS信号に基づく推定現在位置)から20m後方に現在位置表示420が表示されている。
【0063】
次いで、ステップS213において、GPS受信手段111がGPS衛星400からのGPS信号を受信し、ステップS214において現在位置算出手段113がGPS信号に基づく新たな推定現在位置を算出する。
【0064】
次いで、ステップS215において、表示位置決定手段115が現在位置表示420を表示する位置を、S213で受信したGPS信号に基づく新たな推定現在位置から10m後方にずらした位置に決定し、表示手段119に表示する。このときの自動車410のGPS信号に基づく推定現在位置と表示手段119に表示される現在位置表示420の位置との関係が図4(h)に示されている。図4(h)では、自動車410の位置(GPS信号に基づく推定現在位置)から10m後方に現在位置表示420が表示されている。
【0065】
続くステップS216では、GPS受信手段111がGPS衛星400からのGPS信号を受信し、ステップS217において現在位置算出手段113がGPS信号に基づく新たな推定現在位置を算出し、ステップS218において算出された推定現在位置を現在位置とし、表示手段119に現在位置表示420として表示する。このときの状態が図4(i)に示されている。図4(i)では、自動車410の位置(GPS信号に基づく推定現在位置)と現在位置表示420とが同一の位置に表示されている。
【0066】
ステップS210において、GPS信号に基づく推定現在位置と現在位置表示420との距離が50m未満であると判別された場合は、ステップS218の処理に進み、GPS信号に基づく推定現在位置を現在位置として現在位置表示420を表示し、本発明の処理を終了する。
【0067】
なお、この後は、従来どおり、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示する。
【0068】
また、上記実施例では、GPS信号に基づく推定現在位置が算出される毎に、現在位置表示420を、算出されたGPS信号に基づく推定現在位置に段階的に近づかせるように説明を行ったが、上述の通り、自律航法手段112に基づく推定現在位置がGPS信号に基づく推定現在位置より短い周期で算出され、GPS信号に基づく推定現在位置が算出される間の現在位置表示420の位置を、自律航法手段112に基づく推定現在位置に基づいて決定している場合などは、自律航法手段112に基づく推定現在位置が算出される毎に、現在位置表示420を、算出された自律航法手段112に基づく推定現在位置に段階的に近づかせるようにしてもよい。すなわち、現在位置の算出方法に係らず現在位置が算出される毎に、現在位置表示420を、算出された現在位置に段階的に近づかせるようにしてもよい。
【0069】
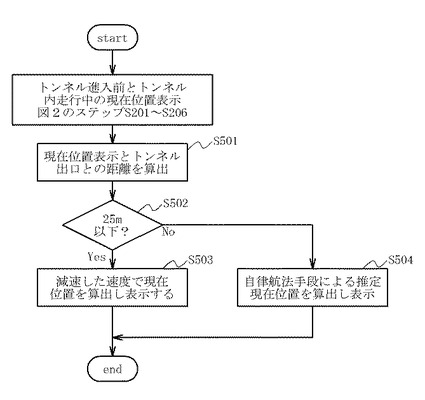
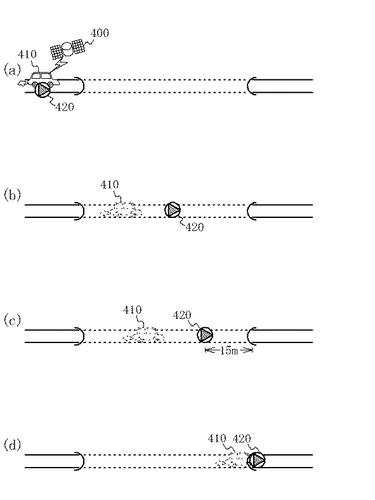
次に、トンネル内において現在位置表示420が実際の自動車の位置よりも進み過ぎた場合の処理について、図5のフローチャート及び図6の概念図を用いて説明する。
【0070】
まず、図6(a)に示すように、本実施例のナビゲーション装置10を搭載した自動車410がGPS衛星400からのGPS信号を受信できる道路を走行し、次いで、図6(b)に示すように、自動車410がトンネルに進入したものとする。このときのナビゲーション装置10における処理は、図2のステップS201〜S206の処理と同様なので詳細な説明は省略する。トンネル内で、自律航法手段112に基づく推定現在位置を算出し、現在位置表示420として表示する。
【0071】
なお、図6(b)では、自律航法手段112の出力に誤差が含まれるために、現在位置表示420の位置が自動車410の位置よりも進みすぎている。図5のステップS501において、位置比較手段114が現在位置表示420の位置とトンネル出口との距離を算出する。これは、地図記憶手段117に記憶された地図情報を参照することで算出することが可能である。
【0072】
なお、ジャイロセンサの出力やGPS信号に基づく推定現在位置の履歴などから進行方向を判別し、現在走行しているトンネル、進行方向及び地図情報を参照することにより、トンネルの出口の位置を判別することが可能である。
【0073】
ステップS502において、現在位置表示420の位置とトンネル出口との距離が所定距離以下、例えば、25m以下であるか否かを判定し、所定距離以下であれば、ステップS503において、現在位置算出手段113は自律航法手段112によって算出される自動車410の加速度または加速度に基づいて算出される速度よりも減速した速度で自律航法手段112に基づく推定現在位置を算出する。例えば、自律航法手段112によって時速60kmで自動車410が走行していると算出される場合、時速30kmの速度で走行しているとみなし、自律航法手段112に基づく推定現在位置を算出する。
【0074】
すなわち、例えば、1秒間隔で現在位置表示420を更新する場合に、時速60kmで自動車410が走行している場合であれば、現在位置表示420の位置から約17m進んだ位置が自律航法手段112に基づく推定現在位置として算出されるが、現在位置表示420の位置とトンネル出口までの距離が25m以下の場合に限っては、時速60kmで自動車410が走行している場合であっても、約8m進んだ位置が自律航法手段112に基づく推定現在位置として算出される。
【0075】
ここで、トンネル出口までの距離が25m以下である場合の自律航法手段112に基づく推定現在位置の算出方法は、上記に限らず、通常通り算出した自律航法手段112に基づく推定現在位置より所定距離下がった位置としてもよいし、予め定められた速度に基づいて推定されてもよい。
【0076】
そして、算出された自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示手段119に表示し、処理を終える。
【0077】
ここで、現在位置表示420の位置とトンネル出口までの距離が25m以下の場合、
現在位置表示420を表示する位置の決定方法は、上記に限らず、トンネル出口までの距離が25m以下と判定された場合、表示位置決定手段115は、自律航法手段112に基づく推定現在位置に関係なく、所定の位置を現在位置表示420を表示する位置として決定してもよい。なお、所定の位置とは、例えば、当該トンネルの出口から20m、15m、10m、5mの位置である。この位置は、地図情報を参照することで求めることが可能である。そして、表示位置決定手段115は、例えば一秒毎に、現在位置表示20を表示する位置を当該トンネルの出口から20m、15m、10m、5mの位置とする。
【0078】
さらに、例えば、自律航法手段112によって算出される自動車410の加速度または加速度に基づいて算出される速度が所定値以上であれば、表示位置決定手段115が、自律航法手段112に基づく推定現在位置に関係なく、所定の位置を現在位置表示420を表示する位置として決定する方法とし、そして、自律航法手段112によって算出される自動車410の加速度または加速度に基づいて算出される速度が所定値以下であれば、現在位置算出手段113が低速(自律航法手段112により算出される加速度または加速度に基づいて算出される速度より遅い速度)で走行しているとみなし、自律航法手段112に基づく推定現在位置を算出する方法としてもよい。
【0079】
上記の処理を行なうことにより、現在位置表示420を実際の自律航法手段112の出力に基づいた現在位置よりも進行方向に対して後方に表示することができる。
【0080】
なお、ナビゲーション装置10が自律航法手段112を備えておらず、加速度センサやジャイロセンサ等が搭載されていない場合には、トンネルに進入する前に算出されたGPS信号に基づく推定現在位置とその前のGPS信号に基づく推定現在位置とに基づき現在位置算出手段113がトンネル進入時の自動車410の速度を算出し、表示位置決定手段115が算出された速度に基づき自動車410のトンネル内の現在位置を決定するようにしてもよく、その際も、現在位置表示420の位置とトンネル出口までの距離が25m以下になった場合、現在位置算出手段113により算出された速度より減速した速度に基づき、自動車410のトンネル内の現在位置を決定するようにするのが好ましい。
【0081】
このときの状態が図6(c)、図6(d)に示されている。図6(c)では、自動車410の実際の位置よりも現在位置表示420がトンネル出口側に進んだ位置に表示されている。そして現在位置表示420の位置からトンネル出口までは15mである。そこで、上述したように、現在位置表示420の位置を自律航法手段112によって算出される加速度または加速度に基づいて算出される速度よりも減速した速度を用いて現在位置表示420を表示する位置を決定し、表示を行う。その状態が図6(d)に示されている。図6(d)では、現在位置表示420がトンネル出口付近に表示されており、自動車410の実際の位置もトンネル出口付近にあり、自動車410の実際の位置が現在位置表示420に追いついていることがわかる。
【0082】
これにより、現在位置表示420(自律航法手段112に基づく推定現在位置)がトンネル内で先走り、自動車410よりもかなり早くトンネル出口に到達してしまうといった場合を防ぐことができ、ユーザに違和感を持たせることがなくなる。
【0083】
自動車410がトンネルを出ると、ナビゲーション装置10はGPS衛星400からのGPS信号を受信することができ、同時に自律航法手段112の出力も得ることができるから、自動車410の実際の位置と現在位置表示420の位置とは正確に一致させて表示させることができる。
【0084】
ステップS502において、現在位置表示420の位置とトンネル出口との距離が所定距離以下、例えば、25m以下でないと判定された場合、ステップS504において、表示位置決定手段115は自律航法手段112に基づく推定現在位置に基づいて現在位置表示420の位置を決定し表示手段119に表示し、処理を終える。なお、ステップS504の処理後は、ステップS501の処理に戻ってもよい。また、自動車410がトンネルを出て、GPS信号を受信し、GPS信号に基づく推定現在位置が算出されると、GPS信号に基づく推定現在位置に基づいて現在位置表示420を表示し、この後は、従来どおり、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示する。
【0085】
本発明によれば、以上説明したように現在位置表示420を表示する位置を調整することにより、車両がトンネル等のGPS信号を受信できない区間からGPS信号を受信できる区間に移動した際に生じる現在位置表示420の表示位置のずれをスムーズに解消することができ、利用者に違和感を与えることがなくなる。また、トンネル内において自動車410の位置と現在位置表示420が略同じ位置であったとしても、自動車410がトンネルを出て、GPS信号を受信し、GPS信号に基づいて現在位置を算出するまでに、多少の時間がかかるため、そのような場合においても、現在位置表示420を遅らせて表示することにより、トンネルの出口において、現在位置表示420をスムーズに表示することができる。
【0086】
なお、上記実施例の図3のフローチャートにおいて、GPS信号に基づく推定現在位置と現在位置表示420との距離が50m以上であった場合(S210のYes)、GPS信号に基づく推定現在位置から下げて表示した後、GPS信号を受信し、GPS信号に基づく推定現在位置を算出する毎に、GPS信号に基づく推定現在位置に現在位置表示420を近づけるように説明を行ったが、これに限ることはなく、例えば、GPS信号に基づく推定現在位置と現在位置表示420との距離が50m以上であった場合(S210のYes)、GPS信号に基づく推定現在位置から下げて表示し、その後、所定時間(例えば0,5秒)が経過する毎に、GPS信号に基づく推定現在位置に現在位置表示420を近づけるようにしてもよい。
【0087】
すなわち、トンネルを出た際に受信したGPS信号に基づく推定現在位置を算出してから、次のGPS信号に基づく推定現在位置を算出するまでに、トンネルを出た際に受信したGPS信号に基づく推定現在位置に現在位置表示420が段階的に近づくように構成してもよい。
【0088】
その際、所定時間は、現在位置算出手段113が算出するGPS信号に基づく推定現在位置の算出間隔と、段階的に近づくために現在位置表示420を更新する回数とに基づき算出されることが好ましい。
【0089】
すなわち、上記実施例の図4(f)のようにGPS信号に基づく推定現在位置と現在位置表示420との距離が120mの場合、上記実施例では、まず、GPS信号に基づく推定現在位置から現在位置表示420を20m下げて表示した後、次に、10m下げて表示し、そして、GPS信号に基づく推定現在位置に現在位置表示420を表示しているため、表示する位置を更新する回数は2回である。そして、上記実施例では、現在位置算出手段113が算出するGPS信号に基づく推定現在位置の算出間隔は、1秒間隔であるため、これを、更新する回数の2回で除算することにより、所定時間(0,5秒)を算出することができる。
【0090】
また、本発明は、表示手段119に表示している地図の縮尺に応じて、処理を切り替えるように構成してもよい。
【0091】
すなわち、現在、表示手段119に表示している地図の縮尺を判別し、表示手段119に表示している地図の縮尺が広域である場合は、本発明によって得られる効果が少ないため、本発明の処理を行なわず、表示手段119に表示している地図の縮尺が詳細である場合は、本発明の効果が顕著に現れるため、本発明の処理を行なうように構成してもよい。
【0092】
また、表示手段119に表示している地図の縮尺に応じて、図3のS210、S211及び図5のS502などで用いる値が変動するように構成してもよい。例えば、表示手段119に表示している地図の縮尺が広域であれば、上記値を大きな値とし、表示手段119に表示している地図の縮尺が詳細であれば、値を小さな値とする。これにより、地図の縮尺が広域であれば、視認できないほどの段階的な表示を行なうことが少なくなるため、無駄な処理を行なわずに済む。また、地図の縮尺が詳細であっても、スムーズに段階的な表示を行なうことが可能となる。
【0093】
さらに、上記実施例では、表示位置決定手段115は、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示する位置を決定したが、この際、現在位置表示420を表示する位置を、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置としてもよいし、その他にも、現在位置算出手段113が推定現在位置を算出するためにかかる処理時間を考慮して、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置よりも先の位置を現在位置表示420を表示する位置として決定してもよい。
【0094】
また、上記のフローチャートにおいて、入力手段116を介してナビゲーション装置10の電源オフ操作がされた場合は、フローチャートの処理を中断して、電源をオフとする。
【符号の説明】
【0095】
10 ナビゲーション装置
100 制御手段
101 CPU
102 ROM
103 RAM
111 GPS受信手段
112 自律航法手段
113 現在位置算出手段
114 位置比較手段
115 表示位置決定手段
116 入力手段
117 地図記憶手段
118 経路探索手段
119 表示手段
400 GPS衛星
410 自動車
420 現在位置表示
【技術分野】
【0001】
本発明は現在位置表示装置、より詳細には、トンネル等のGPS信号を受信できない区間からGPS信号を受信できる区間に移動した際に生じる現在位置の表示位置のずれを解消する表示を行う現在位置表示装置に関する。
【背景技術】
【0002】
自動車等の誘導案内に使用されるカーナビゲーション装置は、GPS衛星からの信号を受信することによって車両の現在位置を特定し、特定された現在位置を地図上に表示してユーザに案内するものである。また、出発地と目的地を経路探索条件として入力し、この経路探索条件を満たすように経路探索を行うことによってその間の最適経路を特定し、最適経路を地図上に表示し、この経路に沿って経路案内を行っている。
【0003】
また、多くのカーナビゲーション装置においては、GPS信号による現在位置の測位に加え、自動車等に設置された車速センサやジャイロスコープ等の自律航法手段と連携することによって現在位置をさらに正確に検出することが行われている。自律航法手段を使用することにより車両が走行した距離や方向を詳細に検出することができる。これにより、現在位置特定の精度を向上でき、また、トンネルやビルの谷間等GPS信号が受信できないところでも現在位置を特定することができる。
【0004】
下記特許文献1(特開平06−317650号公報)は、GPS信号を受信できないときに、現在位置がトンネル内かどうかを判定し、トンネル内であるときは画面上のトンネルの表示を強調するナビゲーション装置を開示している。
【0005】
また、下記特許文献2(特開平05−010774号公報)は、GPS受信機と地磁気センサと加速度センサを備え、GPS衛星からの情報を受信できないときに、加速度センサと地磁気センサからの情報を使用して現在位置を特定するナビゲーション装置を開示している。これにより、トンネルやビルの谷間においてGPS信号が受信不可能な場合でも途切れることなく現在位置を特定してナビゲーション装置の表示部に表示することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平06−317650号公報
【特許文献2】特開平05−010774号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、ナビゲーション装置を搭載した自動車等の車両がトンネル等のGPS信号を受信できない経路を走行する場合、上記特許文献1のようなナビゲーション装置であれば、現在位置の表示は、GPS信号を受信できたトンネルの手前で一旦停止し、トンネル走行中はトンネルの表示が強調され、その後GPS信号を再受信するトンネルの出口で再開されることになり、自車の現在位置をトンネル内での位置を含めて連続的に表示することはできない。
【0008】
また、上記特許文献2のようなナビゲーション装置であれば、トンネル走行中は、地磁気センサや加速度センサの出力に基づいてトンネル内の現在位置を特定して地図上に表示することができるが、地磁気センサや加速度センサの出力に含まれる誤差によって車両の実際の位置と表示されている位置がずれてしまうことがある。また、トンネル内で急激な加減速がある場合は、特に車両の実際の位置とナビゲーション装置が算出した位置との差はより大きくなる。この差は、車両がトンネルから出て、再びGPS信号を受信し、GPS信号に基づいた現在位置に現在位置表示を修正することで改善されるが、その際に、いきなり自車の現在位置が飛んだような(スキップしたような)表示になってしまう。
【0009】
すなわち、ナビゲーション装置が加速度センサなどの出力に基づき算出した位置が実際の車両の位置より遅れている場合に、車両がトンネルを出た際のGPS信号に基づいた現在位置に現在位置表示を修正すると、遅れた距離だけ現在位置表示が変動するため、いきなり自車の現在位置が飛んだような(スキップしたような)表示になってしまう。
【0010】
また、ナビゲーション装置が加速度センサなどの出力に基づき算出した位置が実際の車両の位置より先走りしている場合には、表示している現在位置が先にトンネル出口に到達してしまいユーザに違和感を与えてしまうと共に、GPS信号が受信できないため現在位置の表示がトンネル出口で停止してしまい、ユーザに不信感を与えてしまうといった問題がある。
【0011】
そこで、本発明は、GPS信号を受信できない区間を通行している際に、GPS信号を再び受信できる位置に近づいたと推測される際に、実際の位置と現在位置表示との誤差をスムーズに解消して表示する現在位置表示装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するために、本願請求項1にかかる発明は、表示手段と、GPS受信手段と、前記GPS受信手段において受信されたGPS信号に基づいて現在位置を算出する現在位置算出手段と、前記GPS信号が受信できなくなる前に、前記現在位置算出手段により算出された現在位置に基づいて前記表示手段に表示される現在位置マークの位置を決定する表示位置決定手段と、を備える現在位置表示装置において、前記現在位置表示装置は、位置比較手段を備え、前記GPS受信手段が前記GPS信号を受信できない場合に、前記位置比較手段により前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であると判定された場合、前記現在位置マークを、前記GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示することを特徴とする。
【0013】
また、本願請求項2にかかる発明は、請求項1にかかる発明において、前記現在位置表示装置は、自律航法手段を備え、前記現在位置算出手段は、前記GPS受信手段が前記GPS信号を受信できない場合、前記GPS信号が受信できなくなる前に算出した現在位置及び前記自律航法手段の出力に基づいて現在位置を算出し、前記表示位置決定手段は、該算出された現在位置に基づいて前記現在位置マークの位置を決定することを特徴とする。
【0014】
また、本願請求項3にかかる発明は、請求項1又は2にかかる発明において、前記現在位置表示装置は、GPS信号を受信できる位置を含む地図情報を記憶する地図記憶手段を備え、前記位置比較手段は、前記地図情報を参照し、前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であるか否かを判定することを特徴とする。
【0015】
また、本願請求項4にかかる発明は、請求項1乃至3にかかる発明において、前記表示手段に表示されている地図の縮尺に応じて、前記現在位置マークを、前記現在位置GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示するか否かを切り換えることを特徴とする。
【0016】
また、本願請求項5にかかる発明は、請求項1乃至4にかかる発明において、前記表示手段に表示されている地図の縮尺に応じて、前記所定距離の値を変動させることを特徴とする。
【発明の効果】
【0017】
本願請求項1にかかる発明によると、GPS信号が受信できない場合に、現在位置マークの位置とGPS信号を再度受信できる位置とが所定距離以内であると判定された場合、現在位置マークを、GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される現在位置マークの位置より進行方向に対し後方に表示するため、表示している現在位置マークが先にトンネル出口に到達してしまいユーザに違和感を与えてしまうことを防止することができる。
【0018】
また、本願請求項2にかかる発明によると、GPS信号を受信できない場合、GPS信号が受信できなくなる前に算出した現在位置及び自律航法手段の出力に基づいて現在位置を算出し、該算出された現在位置に基づいて現在位置マークの位置を決定するため、トンネルなどのGPS信号を受信できない場合でも、現在位置を算出して、表示することができる。
【0019】
また、本願請求項3にかかる発明によると、GPS信号を受信できる位置を含む地図情報を記憶する地図記憶手段を備えているため、現在位置マークの位置とGPS信号を再度受信できる位置とが所定距離以内であるか否かを正確に判定できる。
【0020】
また、本願請求項4にかかる発明によると、表示手段に表示されている地図の縮尺に応じて、現在位置マークを、GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される現在位置マークの位置より進行方向に対し後方に表示するか否かを切り換えるため、地図が広域のときなど、本発明の効果が得られにくいときは、本発明の処理を行なわず、無駄な処理を行なうことがなくなる。
【0021】
また、本願請求項5にかかる発明によると、表示手段に表示されている地図の縮尺に応じて、所定距離の値を変動させるため、地図が広域のときなど、本発明の効果が得られにくいときは、無駄な処理を行なうことが少なくなり、且つ、地図が詳細のときなど、本発明の効果が顕著に得られる際には、確実に、本発明の処理を行なうことが可能となる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施例に係るナビゲーション装置10の内部ブロック図である。
【図2】本実施例にかかるナビゲーション装置10におけるトンネル出口付近での現在位置の表示動作を示すフローチャートである。
【図3】図2に続くフローチャートである。
【図4】図2及び図3のフローチャートに従ってナビゲーション装置10がンネル出口付近において行う表示位置の修正の概念図である。
【図5】本実施例にかかるナビゲーション装置10におけるトンネル出口付近において、現在位置表示が実際の自動車の位置よりも進んでいる場合の現在位置の表示動作を示すフローチャートである。
【図6】図5のフローチャートに従ってナビゲーション装置10がトンネル出口付近において行う表示位置の修正の概念図である。
【発明を実施するための形態】
【0023】
以下、本願発明を実施するための最良の形態を実施例と共に図1〜図6を参照して詳細に説明する。ただし、以下に示す実施形態は、本発明の技術的思想を具体化するためのナビゲーション装置を例示して説明するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の現在位置表示装置にも等しく適用し得るものである。
【実施例】
【0024】
最初に、図1を参照して本発明の実施例に係るナビゲーション装置10について説明する。なお、図1は、本発明の実施例に係るナビゲーション装置10の内部ブロック図である。
【0025】
ナビゲーション装置10は、制御手段100、GPS受信手段111、自律航法手段112、現在位置算出手段113、位置比較手段114、表示位置決定手段115、入力手段116、地図記憶手段117、経路探索手段118、表示手段119を備えて構成される。
【0026】
制御手段100は、CPU101、ROM102、RAM103を含むマイクロプロセッサから構成され、ROM102に記憶されたプログラムをCPU101において実行することによりナビゲーション装置10の各部の動作を制御する。
【0027】
GPS受信手段111は、地球上空を周回している複数のGPS衛星から、各GPS衛星の位置情報及び時刻情報を含むGPS信号を受信するアンテナなどを含んで構成される。GPS信号には、アルマナックデータ及びエフェメリスデータの2種類のデータが含まれる。アルマナックデータは、全GPS衛星の軌道情報及び衛星時計の補正情報を含み、エフェメリスデータは、各GPS衛星の詳細な位置情報及びGPS信号を発射した時刻情報を含む。
【0028】
自律航法手段112は、ナビゲーション装置10が搭載される車両に設置された加速度センサ、ジャイロセンサ等に接続され、センサからの検出信号を適切な出力信号に変換する。なお、加速度センサ、ジャイロセンサ等のセンサはナビゲーション装置10が備えてもよい。
【0029】
現在位置算出手段113は、GPS受信手段111において受信したアルマナックデータ及びエフェメリスデータに基づき、緯度情報及び経度情報からなる車両の推定現在位置(GPS信号に基づく推定現在位置)を算出する。
【0030】
現在位置算出手段113は、一般的には、所定の時間間隔、例えば、本実施例では1秒間隔でGPS信号に基づく推定現在位置を算出する。そして、現在位置算出手段113は、今回算出した推定現在位置と前回算出した推定現在位置に基づいて、車両の角速度、加速度および速度などを算出することが可能である。従って、現在位置算出手段113により1秒に1回、車両の現在位置、速度、角速度、加速度等の値が算出される。
【0031】
現在位置算出手段113は、さらに、自律航法手段112において変換出力された加速度センサの出力、ジャイロセンサの出力に基づいて、推定現在位置(自律航法手段112に基づく推定現在位置)を算出する。例えば、本実施例の自律航法手段112においては、10msec毎に角速度、加速度を検出し、100msec毎に、10msec毎に検出した角速度、加速度(それぞれ10個のデータ)の平均値を算出して、さらに、100msec毎に算出された角速度、加速度の平均値の10個のデータを用いて移動平均し、車両の角速度、加速度とする処理を行う。100msec毎の移動平均値算出処理にあたっては、100msec毎に得られる最新の10個のデータを用いて、(1番目のデータを削除し、11番目のデータを採用する)それらの平均値を100msec毎に算出する。
【0032】
そして、現在位置算出手段113は、GPS信号に基づく推定現在位置を基準とし、自律航法手段112により算出された角速度、加速度を用いることにより自律航法手段112に基づく推定現在位置を算出する。
【0033】
ここで、本実施例においては、GPS信号に基づく推定現在位置は1秒間隔であり、自律航法手段112により算出される角速度、加速度は100msec間隔であるため、GPS信号に基づく推定現在位置の算出中(1秒間中)の車両の位置を自律航法手段112に基づいて算出することで、車両の位置の更新間隔が短くなり、車両の位置特定の精度が向上する。
【0034】
なお、自律航法手段112に基づく推定現在位置を連続して算出する場合は、前回算出した自律航法手段112に基づく推定現在位置を基準とし、自律航法手段112により算出された角速度、加速度を用いることにより自律航法手段112に基づく推定現在位置を算出することが好ましい。
【0035】
このように現在位置算出手段113は、GPS受信手段111および自律航法手段112によって車両の現在位置を算出するが、その他にも、上記GPS信号を受信して算出した推定現在位置と前回算出した推定現在位置から算出される車両の速度が時速20km/h以下ではGPS受信手段111による推定現在位置が用いられ、時速20km/hを上回ると自律航法手段112による推定現在位置が用いられるように構成してもよく、さらに、GPS受信手段111による推定現在位置と自律航法手段112による推定現在位置の差が所定以上であった場合には、自律航法手段112による推定現在位置をGPS受信手段111による推定現在位置にオフセットするように構成してもよい。
【0036】
また、地下通路やトンネルなどGPS信号の受信が不可能でGPS信号に基づく推定現在位置が算出できない場所を走行している場合、あるいは、マルチパスの影響によりGPS受信手段111による測位結果に大きな誤差か生じるビル街などを走行している場合には、GPS受信手段111に基づく推定現在位置を採用せず、自律航法手段112による推定現在位置を用いるように構成される。また、逆にジャイロセンサ、加速度センサの誤差により自律航法手段112による推定現在位置に大きな誤差が生じる場合には、GPS受信手段111に基づく推定現在位置が用いられる。
【0037】
位置比較手段114は、トンネル等のGPS信号を受信できない区間を走行した後に再びGPS信号を受信できるようになった場合、GPS信号に基づく推定現在位置と、それまでの現在位置表示420(図4参照)の位置(自律航法手段112の出力に基づいて後述する表示位置決定手段115によって特定された現在位置の表示位置)とを比較し、両者がどの程度の距離だけ離れているかを判定するものである。すなわち、トンネル等のGPS信号を受信できない区間を走行している場合は、上述の通り、自律航法手段112に基づく推定現在位置が採用されているため、自律航法手段112に基づく推定現在位置に基づいて現在位置表示420の表示を行なっている。そして、その際に、再びGPS信号を受信できるようになった場合、GPS信号に基づく推定現在位置と、現在位置表示420の位置との距離を判定する。
【0038】
また、位置比較手段114は、後述する表示手段119に表示されている現在位置表示420の位置と後述する地図記憶手段117に記憶されている地図情報を比較することによって車両がトンネル内を走行しているか否かを判定する。また、位置比較手段114は、現在位置表示420の位置とトンネル出口位置との距離を判定する。
【0039】
表示位置決定手段115は、現在位置表示420を表示する位置を決定する手段であり、特に、位置比較手段114において、自律航法手段112に基づく推定現在位置とGPS信号に基づく推定現在位置とが所定距離以上離れていると判定された場合に、現在位置表示420を表示する位置を、現在、表示している位置からGPS信号に基づく推定現在位置へと段階的に近づくように移動させる。表示位置決定の具体的な方法は後述する。
【0040】
入力手段116は、車両のドライバ等によって操作される各種キー、スイッチ、タッチパネル等から構成されるものであり、例えば、ナビゲーション装置10を用いて目的地までの経路案内を行う場合、出発地、目的地、経由地等を入力するためのものである。
【0041】
地図記憶手段117は、道路の分岐地点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータと縮尺の異なる複数の地図画像を含む地図情報を記憶する。道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が含まれる他、分岐地点から所定距離だけ離れた案内地点において、右左折、直進等の経路案内を行う経路案内データ及び案内地点の位置座標が記憶される。
【0042】
また、道路リンクデータには、始点及び終点となる道路ノード番号、道路種別、ノード間の距離情報であるリンク長(リンクコスト)、所要時間、車線数、車道幅などが含まれる。道路リンクデータには、さらに、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。道路種別とは、高架道路と高架下道路との別、高速道路や有料道路の別、国道や都道府県道等の別を含む情報である。
【0043】
さらに、地図記憶手段117には、海岸線、湖沼、河川形状などの水系データ、行政境界データ、駐車場をはじめとする施設位置、施設形状、施設名称などを含む施設データからなる背景データが記憶されている。
【0044】
さらに、地図記憶手段117には、車両の走行路や目的地までの案内経路、目的地までの走行距離、走行時間を示すための地図情報が記憶される。また、地図情報は、トンネルやビル街、地下道路などのGPS信号が受信できない場所が識別されており、さらにトンネルの出入口、地下道路の出入口などGPS信号が受信できなくなる位置、或いは、GPS信号が受信可能になる位置も含まれる。なお、GPS信号が受信できる場所か否かの情報は、車両がその場所を通過した際に、GPS信号を受信できたか否かを判別し、判別結果を反映して、更新するように構成してもよい。
【0045】
経路探索手段118は、ユーザが入力手段116を用いて目的地を入力すると、地図記憶手段117に記憶されている地図情報を参照し、現在位置又はユーザによって指定された出発地から目的地に至る最適な案内経路を探索するものである。
【0046】
案内経路の探索は、現在位置又は出発地に対応する道路ノードから目的地に対応する道路ノードまでに至るリンクとノードをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長(走行距離)又は総所要時間等が最短となる経路を案内経路とし、当該経路に属する道路ノードやリンクを案内経路データとして提供するものである。
【0047】
表示手段119は、地図画像や案内経路画像、車両の現在位置を示すマーク(本実施例では現在位置表示420)等を表示してユーザが視認できるようにするためのものであり、液晶ディスプレイなどで構成される。なお、この表示手段119は、タッチセンサを備えた入力手段116として機能させてもよい。この場合、ディスプレイ上に表示されたアイコンをユーザが触れることで選択入力が行われる。
【0048】
次に、本発明のナビゲーション装置10における現在位置の表示について、図2〜図6を参照して説明する。図2及び図3は、本実施例にかかるナビゲーション装置10におけるトンネル出口付近での現在位置の表示動作を示すフローチャートである。図4は、図2のフローチャートに従ってナビゲーション装置10がトンネル出口付近において行う表示位置の修正の概念図である。図5は、本実施例にかかるナビゲーション装置10におけるトンネル出口付近において、現在位置表示420が実際の自動車の位置よりも進んでいる場合の現在位置の表示動作を示すフローチャートであり、図6は、図5のフローチャートに従ってナビゲーション装置10がトンネル出口付近において行う表示位置の修正の概念図である。なお、以下の説明では、車両の例として自動車410(図4参照)を用いて説明する。
【0049】
まず、図4(a)に示すように、本実施例のナビゲーション装置10を搭載した自動車410がGPS衛星400からのGPS信号を受信できる道路を走行している場合について考える。なお、図4にはGPS衛星400は1機しか描かれていないが、実際には複数存在する。
【0050】
ステップS201において、GPS受信手段111はGPS衛星400からGPS信号を受信する。次いでステップS202において、現在位置算出手段113は、受信したGPS信号に基づいて推定現在位置を算出する。なお、このとき、自動車410に搭載された加速度センサやジャイロセンサ等の自律航法手段112の出力信号に基づいて、現在位置算出手段113は自律航法手段112に基づく推定現在位置を算出してもよい。
【0051】
ステップS203においては、表示位置決定手段115が現在位置算出手段113において算出されたGPS信号に基づく推定現在位置に基づいて現在位置を表示する位置を決定し、現在位置表示420を表示手段119に表示する。図4(a)では、現在位置表示420として進行方向を三角形で示し、それを円で囲んだマークを用いている。この現在位置表示420は、自動車410の実際の位置と略同一の位置に表示されている。
【0052】
次いで、ステップS204において、自動車410がトンネルに進入したか否かを判別する。これは、位置比較手段114が、表示手段119に表示された現在位置表示420の位置と地図記憶手段117に記憶されている地図情報とを比較することによって判定される。
また、その他にも、トンネル付近でGPS信号が受信できなくなった場合、トンネルに進入したと判定することも可能である。トンネル内に進入したと判定されなかった場合、ステップS201の処理に戻り、ステップS201〜ステップS204の処理を繰り返し行う。
【0053】
ステップS204において、自動車410がトンネルに進入したと判別された場合、ステップS205の処理に進む。この状態が図4(b)に示されている。このとき、自動車410のGPS受信手段111はGPS衛星400からのGPS信号を受信することができない。そこでステップS205では、現在位置算出手段113が自律航法手段112に基づく推定現在位置を算出することでトンネル内の自動車410の現在位置を算出する。続くステップS206では、表示位置決定手段115が自律航法手段112に基づく推定現在位置を自動車410の現在位置として現在位置表示420の表示を行う。図4(b)では、実際の自動車410の位置から少しずれた位置に現在位置表示420が表示されているが、これは、加速度センサやジャイロセンサの誤差によって生じるものである。この誤差は、経年変化や温度による誤差、道路の勾配や路面状態による誤差、加速度センサやジャイロセンサを備えたポータブルナビゲーションなどであれば取り付け角度などの取り付け方による誤差など、様々な要因が考えられる。
【0054】
なお、ナビゲーション装置10が自律航法手段112を備えておらず、加速度センサやジャイロセンサ等が搭載されていない場合には、トンネルに進入する前に算出されたGPS信号に基づく推定現在位置とその前のGPS信号に基づく推定現在位置とに基づき現在位置算出手段113がトンネル進入時の自動車410の速度を算出し、表示位置決定手段115が算出された速度に基づき自動車410のトンネル内の現在位置を決定するようにしてもよい。
【0055】
ステップS207において、GPS受信手段111はGPS信号を受信したか否かを判別する。GPS信号を受信しない場合は、ステップS205〜S207の処理を繰り返し行う。ステップS207において、GPS信号を受信したと判別された場合、ステップS208の処理に進む。
【0056】
ステップS208において、GPS受信手段111がGPS衛星400から受信したGPS信号に基づき、現在位置算出手段113がGPS信号に基づく推定現在位置を算出する。次いでステップS209において、位置比較手段114は、表示手段119に表示されている現在位置表示420の位置と、S207で受信したGPS信号に基づく推定現在位置とを比較し、その距離を算出する。
【0057】
図3のステップS210において、現在位置表示420の位置とGPS信号に基づく推定現在位置との差が50m以上か否かを判別し、50m未満の場合には、ステップ218の処理に進み、50m以上の場合にはステップS211の処理に進む。ステップS211では、さらに、現在位置表示420の位置とGPS信号に基づく推定現在位置との差が100m以上か否かを判別する。
【0058】
図4(c)の場合、自動車410がトンネル出口に差し掛かったところでGPS衛星400からのGPS信号を受信することができた。これまで自動車410は、自律航法手段112に基づく推定現在位置に基づいて現在位置表示420の表示を行ってきたが、ここでGPS信号に基づく推定現在位置を得ることができ、図4(c)では、トンネル出口のところにGPS信号に基づく推定現在位置を得ることができる。しかしながら、このときの現在位置表示420の位置は、GPS信号に基づく推定現在位置から75m遅れた位置ある。この場合、ステップS210、ステップS211の処理において、現在位置表示420の位置とGPS信号に基づく現在位置との差が50m以上100m以内であるから、処理はステップS215に進む。
【0059】
ステップS215では、表示位置決定手段115が現在位置表示420を表示する位置を、GPS信号に基づく推定現在位置から10m後方にずらした位置に決定し、表示手段119に表示する。このときの自動車410のGPS信号に基づく現在位置と表示手段119に表示される現在位置表示420の位置との関係が図4(d)に示されている。図4(d)では、GPS信号に基づく推定現在位置から10m後方に現在位置表示420が表示されている。
【0060】
続くステップS216では、GPS受信手段111がGPS衛星400からのGPS信号を受信し、ステップS217において現在位置算出手段113がGPS信号に基づく新たな推定現在位置を算出し、ステップS218において算出された推定現在位置を現在位置とし、表示手段119に現在位置表示420として表示する。このときの状態が図4(e)に示されている。図4(e)では、GPS信号に基づく推定現在位置と現在位置表示420とが同一の位置に表示されている。
【0061】
ステップS210及びステップS211において、現在位置表示420の位置とGPS信号に基づく推定現在位置との差が100m以上であると判定された場合、処理はステップS212に進む。なお、この状況が図4(f)に示されている。図4(f)では、自動車410がトンネル出口に差し掛かったときにGPS衛星400からのGPS信号を受信でき、GPS信号に基づく推定現在位置をトンネル出口のところに得ることができるが、現在位置表示420の位置は、GPS信号に基づく推定現在位置から120m遅れた位置にある。
【0062】
ステップS212において、表示位置決定手段115が現在位置表示420を表示する位置を、GPS信号に基づく推定現在位置から20m後方にずらした位置に決定し、表示手段119に表示する。このときの自動車410のGPS信号に基づく推定現在位置と表示手段119に表示された現在位置表示420の位置との関係が図4(g)に示されている。図4(g)では、自動車410の位置(GPS信号に基づく推定現在位置)から20m後方に現在位置表示420が表示されている。
【0063】
次いで、ステップS213において、GPS受信手段111がGPS衛星400からのGPS信号を受信し、ステップS214において現在位置算出手段113がGPS信号に基づく新たな推定現在位置を算出する。
【0064】
次いで、ステップS215において、表示位置決定手段115が現在位置表示420を表示する位置を、S213で受信したGPS信号に基づく新たな推定現在位置から10m後方にずらした位置に決定し、表示手段119に表示する。このときの自動車410のGPS信号に基づく推定現在位置と表示手段119に表示される現在位置表示420の位置との関係が図4(h)に示されている。図4(h)では、自動車410の位置(GPS信号に基づく推定現在位置)から10m後方に現在位置表示420が表示されている。
【0065】
続くステップS216では、GPS受信手段111がGPS衛星400からのGPS信号を受信し、ステップS217において現在位置算出手段113がGPS信号に基づく新たな推定現在位置を算出し、ステップS218において算出された推定現在位置を現在位置とし、表示手段119に現在位置表示420として表示する。このときの状態が図4(i)に示されている。図4(i)では、自動車410の位置(GPS信号に基づく推定現在位置)と現在位置表示420とが同一の位置に表示されている。
【0066】
ステップS210において、GPS信号に基づく推定現在位置と現在位置表示420との距離が50m未満であると判別された場合は、ステップS218の処理に進み、GPS信号に基づく推定現在位置を現在位置として現在位置表示420を表示し、本発明の処理を終了する。
【0067】
なお、この後は、従来どおり、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示する。
【0068】
また、上記実施例では、GPS信号に基づく推定現在位置が算出される毎に、現在位置表示420を、算出されたGPS信号に基づく推定現在位置に段階的に近づかせるように説明を行ったが、上述の通り、自律航法手段112に基づく推定現在位置がGPS信号に基づく推定現在位置より短い周期で算出され、GPS信号に基づく推定現在位置が算出される間の現在位置表示420の位置を、自律航法手段112に基づく推定現在位置に基づいて決定している場合などは、自律航法手段112に基づく推定現在位置が算出される毎に、現在位置表示420を、算出された自律航法手段112に基づく推定現在位置に段階的に近づかせるようにしてもよい。すなわち、現在位置の算出方法に係らず現在位置が算出される毎に、現在位置表示420を、算出された現在位置に段階的に近づかせるようにしてもよい。
【0069】
次に、トンネル内において現在位置表示420が実際の自動車の位置よりも進み過ぎた場合の処理について、図5のフローチャート及び図6の概念図を用いて説明する。
【0070】
まず、図6(a)に示すように、本実施例のナビゲーション装置10を搭載した自動車410がGPS衛星400からのGPS信号を受信できる道路を走行し、次いで、図6(b)に示すように、自動車410がトンネルに進入したものとする。このときのナビゲーション装置10における処理は、図2のステップS201〜S206の処理と同様なので詳細な説明は省略する。トンネル内で、自律航法手段112に基づく推定現在位置を算出し、現在位置表示420として表示する。
【0071】
なお、図6(b)では、自律航法手段112の出力に誤差が含まれるために、現在位置表示420の位置が自動車410の位置よりも進みすぎている。図5のステップS501において、位置比較手段114が現在位置表示420の位置とトンネル出口との距離を算出する。これは、地図記憶手段117に記憶された地図情報を参照することで算出することが可能である。
【0072】
なお、ジャイロセンサの出力やGPS信号に基づく推定現在位置の履歴などから進行方向を判別し、現在走行しているトンネル、進行方向及び地図情報を参照することにより、トンネルの出口の位置を判別することが可能である。
【0073】
ステップS502において、現在位置表示420の位置とトンネル出口との距離が所定距離以下、例えば、25m以下であるか否かを判定し、所定距離以下であれば、ステップS503において、現在位置算出手段113は自律航法手段112によって算出される自動車410の加速度または加速度に基づいて算出される速度よりも減速した速度で自律航法手段112に基づく推定現在位置を算出する。例えば、自律航法手段112によって時速60kmで自動車410が走行していると算出される場合、時速30kmの速度で走行しているとみなし、自律航法手段112に基づく推定現在位置を算出する。
【0074】
すなわち、例えば、1秒間隔で現在位置表示420を更新する場合に、時速60kmで自動車410が走行している場合であれば、現在位置表示420の位置から約17m進んだ位置が自律航法手段112に基づく推定現在位置として算出されるが、現在位置表示420の位置とトンネル出口までの距離が25m以下の場合に限っては、時速60kmで自動車410が走行している場合であっても、約8m進んだ位置が自律航法手段112に基づく推定現在位置として算出される。
【0075】
ここで、トンネル出口までの距離が25m以下である場合の自律航法手段112に基づく推定現在位置の算出方法は、上記に限らず、通常通り算出した自律航法手段112に基づく推定現在位置より所定距離下がった位置としてもよいし、予め定められた速度に基づいて推定されてもよい。
【0076】
そして、算出された自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示手段119に表示し、処理を終える。
【0077】
ここで、現在位置表示420の位置とトンネル出口までの距離が25m以下の場合、
現在位置表示420を表示する位置の決定方法は、上記に限らず、トンネル出口までの距離が25m以下と判定された場合、表示位置決定手段115は、自律航法手段112に基づく推定現在位置に関係なく、所定の位置を現在位置表示420を表示する位置として決定してもよい。なお、所定の位置とは、例えば、当該トンネルの出口から20m、15m、10m、5mの位置である。この位置は、地図情報を参照することで求めることが可能である。そして、表示位置決定手段115は、例えば一秒毎に、現在位置表示20を表示する位置を当該トンネルの出口から20m、15m、10m、5mの位置とする。
【0078】
さらに、例えば、自律航法手段112によって算出される自動車410の加速度または加速度に基づいて算出される速度が所定値以上であれば、表示位置決定手段115が、自律航法手段112に基づく推定現在位置に関係なく、所定の位置を現在位置表示420を表示する位置として決定する方法とし、そして、自律航法手段112によって算出される自動車410の加速度または加速度に基づいて算出される速度が所定値以下であれば、現在位置算出手段113が低速(自律航法手段112により算出される加速度または加速度に基づいて算出される速度より遅い速度)で走行しているとみなし、自律航法手段112に基づく推定現在位置を算出する方法としてもよい。
【0079】
上記の処理を行なうことにより、現在位置表示420を実際の自律航法手段112の出力に基づいた現在位置よりも進行方向に対して後方に表示することができる。
【0080】
なお、ナビゲーション装置10が自律航法手段112を備えておらず、加速度センサやジャイロセンサ等が搭載されていない場合には、トンネルに進入する前に算出されたGPS信号に基づく推定現在位置とその前のGPS信号に基づく推定現在位置とに基づき現在位置算出手段113がトンネル進入時の自動車410の速度を算出し、表示位置決定手段115が算出された速度に基づき自動車410のトンネル内の現在位置を決定するようにしてもよく、その際も、現在位置表示420の位置とトンネル出口までの距離が25m以下になった場合、現在位置算出手段113により算出された速度より減速した速度に基づき、自動車410のトンネル内の現在位置を決定するようにするのが好ましい。
【0081】
このときの状態が図6(c)、図6(d)に示されている。図6(c)では、自動車410の実際の位置よりも現在位置表示420がトンネル出口側に進んだ位置に表示されている。そして現在位置表示420の位置からトンネル出口までは15mである。そこで、上述したように、現在位置表示420の位置を自律航法手段112によって算出される加速度または加速度に基づいて算出される速度よりも減速した速度を用いて現在位置表示420を表示する位置を決定し、表示を行う。その状態が図6(d)に示されている。図6(d)では、現在位置表示420がトンネル出口付近に表示されており、自動車410の実際の位置もトンネル出口付近にあり、自動車410の実際の位置が現在位置表示420に追いついていることがわかる。
【0082】
これにより、現在位置表示420(自律航法手段112に基づく推定現在位置)がトンネル内で先走り、自動車410よりもかなり早くトンネル出口に到達してしまうといった場合を防ぐことができ、ユーザに違和感を持たせることがなくなる。
【0083】
自動車410がトンネルを出ると、ナビゲーション装置10はGPS衛星400からのGPS信号を受信することができ、同時に自律航法手段112の出力も得ることができるから、自動車410の実際の位置と現在位置表示420の位置とは正確に一致させて表示させることができる。
【0084】
ステップS502において、現在位置表示420の位置とトンネル出口との距離が所定距離以下、例えば、25m以下でないと判定された場合、ステップS504において、表示位置決定手段115は自律航法手段112に基づく推定現在位置に基づいて現在位置表示420の位置を決定し表示手段119に表示し、処理を終える。なお、ステップS504の処理後は、ステップS501の処理に戻ってもよい。また、自動車410がトンネルを出て、GPS信号を受信し、GPS信号に基づく推定現在位置が算出されると、GPS信号に基づく推定現在位置に基づいて現在位置表示420を表示し、この後は、従来どおり、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示する。
【0085】
本発明によれば、以上説明したように現在位置表示420を表示する位置を調整することにより、車両がトンネル等のGPS信号を受信できない区間からGPS信号を受信できる区間に移動した際に生じる現在位置表示420の表示位置のずれをスムーズに解消することができ、利用者に違和感を与えることがなくなる。また、トンネル内において自動車410の位置と現在位置表示420が略同じ位置であったとしても、自動車410がトンネルを出て、GPS信号を受信し、GPS信号に基づいて現在位置を算出するまでに、多少の時間がかかるため、そのような場合においても、現在位置表示420を遅らせて表示することにより、トンネルの出口において、現在位置表示420をスムーズに表示することができる。
【0086】
なお、上記実施例の図3のフローチャートにおいて、GPS信号に基づく推定現在位置と現在位置表示420との距離が50m以上であった場合(S210のYes)、GPS信号に基づく推定現在位置から下げて表示した後、GPS信号を受信し、GPS信号に基づく推定現在位置を算出する毎に、GPS信号に基づく推定現在位置に現在位置表示420を近づけるように説明を行ったが、これに限ることはなく、例えば、GPS信号に基づく推定現在位置と現在位置表示420との距離が50m以上であった場合(S210のYes)、GPS信号に基づく推定現在位置から下げて表示し、その後、所定時間(例えば0,5秒)が経過する毎に、GPS信号に基づく推定現在位置に現在位置表示420を近づけるようにしてもよい。
【0087】
すなわち、トンネルを出た際に受信したGPS信号に基づく推定現在位置を算出してから、次のGPS信号に基づく推定現在位置を算出するまでに、トンネルを出た際に受信したGPS信号に基づく推定現在位置に現在位置表示420が段階的に近づくように構成してもよい。
【0088】
その際、所定時間は、現在位置算出手段113が算出するGPS信号に基づく推定現在位置の算出間隔と、段階的に近づくために現在位置表示420を更新する回数とに基づき算出されることが好ましい。
【0089】
すなわち、上記実施例の図4(f)のようにGPS信号に基づく推定現在位置と現在位置表示420との距離が120mの場合、上記実施例では、まず、GPS信号に基づく推定現在位置から現在位置表示420を20m下げて表示した後、次に、10m下げて表示し、そして、GPS信号に基づく推定現在位置に現在位置表示420を表示しているため、表示する位置を更新する回数は2回である。そして、上記実施例では、現在位置算出手段113が算出するGPS信号に基づく推定現在位置の算出間隔は、1秒間隔であるため、これを、更新する回数の2回で除算することにより、所定時間(0,5秒)を算出することができる。
【0090】
また、本発明は、表示手段119に表示している地図の縮尺に応じて、処理を切り替えるように構成してもよい。
【0091】
すなわち、現在、表示手段119に表示している地図の縮尺を判別し、表示手段119に表示している地図の縮尺が広域である場合は、本発明によって得られる効果が少ないため、本発明の処理を行なわず、表示手段119に表示している地図の縮尺が詳細である場合は、本発明の効果が顕著に現れるため、本発明の処理を行なうように構成してもよい。
【0092】
また、表示手段119に表示している地図の縮尺に応じて、図3のS210、S211及び図5のS502などで用いる値が変動するように構成してもよい。例えば、表示手段119に表示している地図の縮尺が広域であれば、上記値を大きな値とし、表示手段119に表示している地図の縮尺が詳細であれば、値を小さな値とする。これにより、地図の縮尺が広域であれば、視認できないほどの段階的な表示を行なうことが少なくなるため、無駄な処理を行なわずに済む。また、地図の縮尺が詳細であっても、スムーズに段階的な表示を行なうことが可能となる。
【0093】
さらに、上記実施例では、表示位置決定手段115は、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置に基づいて現在位置表示420を表示する位置を決定したが、この際、現在位置表示420を表示する位置を、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置としてもよいし、その他にも、現在位置算出手段113が推定現在位置を算出するためにかかる処理時間を考慮して、GPS信号に基づく推定現在位置または自律航法手段112に基づく推定現在位置よりも先の位置を現在位置表示420を表示する位置として決定してもよい。
【0094】
また、上記のフローチャートにおいて、入力手段116を介してナビゲーション装置10の電源オフ操作がされた場合は、フローチャートの処理を中断して、電源をオフとする。
【符号の説明】
【0095】
10 ナビゲーション装置
100 制御手段
101 CPU
102 ROM
103 RAM
111 GPS受信手段
112 自律航法手段
113 現在位置算出手段
114 位置比較手段
115 表示位置決定手段
116 入力手段
117 地図記憶手段
118 経路探索手段
119 表示手段
400 GPS衛星
410 自動車
420 現在位置表示
【特許請求の範囲】
【請求項1】
表示手段と、GPS受信手段と、前記GPS受信手段において受信されたGPS信号に基づいて現在位置を算出する現在位置算出手段と、前記GPS信号が受信できなくなる前に、前記現在位置算出手段により算出された現在位置に基づいて前記表示手段に表示される現在位置マークの位置を決定する表示位置決定手段と、を備える現在位置表示装置において、
前記現在位置表示装置は、位置比較手段を備え、
前記GPS受信手段が前記GPS信号を受信できない場合に、前記位置比較手段により前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であると判定された場合、前記現在位置マークを、前記GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示することを特徴とする現在位置表示装置。
【請求項2】
前記現在位置表示装置は、自律航法手段を備え、
前記現在位置算出手段は、前記GPS受信手段が前記GPS信号を受信できない場合、前記GPS信号が受信できなくなる前に算出した現在位置及び前記自律航法手段の出力に基づいて現在位置を算出し、前記表示位置決定手段は、該算出された現在位置に基づいて前記現在位置マークの位置を決定することを特徴とする請求項1に記載の現在位置表示装置。
【請求項3】
前記現在位置表示装置は、GPS信号を受信できる位置を含む地図情報を記憶する地図記憶手段を備え、
前記位置比較手段は、前記地図情報を参照し、前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であるか否かを判定することを特徴とする請求項1又は2に記載の現在位置表示装置。
【請求項4】
前記表示手段に表示されている地図の縮尺に応じて、前記現在位置マークを、前記現在位置GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示するか否かを切り換えることを特徴とする請求項1乃至3に記載の現在位置表示装置。
【請求項5】
前記表示手段に表示されている地図の縮尺に応じて、前記所定距離の値を変動させることを特徴とする請求項1乃至4に記載の現在位置表示装置。
【請求項1】
表示手段と、GPS受信手段と、前記GPS受信手段において受信されたGPS信号に基づいて現在位置を算出する現在位置算出手段と、前記GPS信号が受信できなくなる前に、前記現在位置算出手段により算出された現在位置に基づいて前記表示手段に表示される現在位置マークの位置を決定する表示位置決定手段と、を備える現在位置表示装置において、
前記現在位置表示装置は、位置比較手段を備え、
前記GPS受信手段が前記GPS信号を受信できない場合に、前記位置比較手段により前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であると判定された場合、前記現在位置マークを、前記GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示することを特徴とする現在位置表示装置。
【請求項2】
前記現在位置表示装置は、自律航法手段を備え、
前記現在位置算出手段は、前記GPS受信手段が前記GPS信号を受信できない場合、前記GPS信号が受信できなくなる前に算出した現在位置及び前記自律航法手段の出力に基づいて現在位置を算出し、前記表示位置決定手段は、該算出された現在位置に基づいて前記現在位置マークの位置を決定することを特徴とする請求項1に記載の現在位置表示装置。
【請求項3】
前記現在位置表示装置は、GPS信号を受信できる位置を含む地図情報を記憶する地図記憶手段を備え、
前記位置比較手段は、前記地図情報を参照し、前記現在位置マークの位置と前記GPS信号を再度受信できる位置とが所定距離以内であるか否かを判定することを特徴とする請求項1又は2に記載の現在位置表示装置。
【請求項4】
前記表示手段に表示されている地図の縮尺に応じて、前記現在位置マークを、前記現在位置GPS信号が受信できなくなる前に算出された現在位置に基づいて決定される前記現在位置マークの位置より進行方向に対し後方に表示するか否かを切り換えることを特徴とする請求項1乃至3に記載の現在位置表示装置。
【請求項5】
前記表示手段に表示されている地図の縮尺に応じて、前記所定距離の値を変動させることを特徴とする請求項1乃至4に記載の現在位置表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−158286(P2011−158286A)
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願番号】特願2010−18506(P2010−18506)
【出願日】平成22年1月29日(2010.1.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願日】平成22年1月29日(2010.1.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]