
球体駆動モジュール及びそれを用いた搬送装置
【課題】シンプルな構造を有し、短時間で搬送物の方向転換、位置決めを行う球体駆動モジュール及びそれを用いた搬送装置を提供する。
【解決手段】搬送物下面に当接して回転可能な球体11と、球体11を回転する駆動機構12と、球体11を回転可能に保持する球体保持部材13と、球体保持部材13及び駆動機構12の基台14と、支持部材15を介して基台14に取付けられ、球体保持部材13及び駆動機構12を覆い上面の開口部16から球体11の上部を露出させるカバー部材17とを有する球体駆動モジュール10であって、駆動機構12は、平面視して球体11の中心に向けて直交する方向から球体11に当接する第1、第2の駆動輪18、19と、第1、第2の駆動輪18、19の第1、第2の回転駆動源20、21と、球体11を挟んで第1、第2の駆動輪18、19と対向する第1、第2の補助受け部材22、23とを備え、球体11の表層部はゴム又は樹脂からなる。
【解決手段】搬送物下面に当接して回転可能な球体11と、球体11を回転する駆動機構12と、球体11を回転可能に保持する球体保持部材13と、球体保持部材13及び駆動機構12の基台14と、支持部材15を介して基台14に取付けられ、球体保持部材13及び駆動機構12を覆い上面の開口部16から球体11の上部を露出させるカバー部材17とを有する球体駆動モジュール10であって、駆動機構12は、平面視して球体11の中心に向けて直交する方向から球体11に当接する第1、第2の駆動輪18、19と、第1、第2の駆動輪18、19の第1、第2の回転駆動源20、21と、球体11を挟んで第1、第2の駆動輪18、19と対向する第1、第2の補助受け部材22、23とを備え、球体11の表層部はゴム又は樹脂からなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、底が平坦な搬送物の下面に当接して回転可能な球体を備えた球体駆動モジュール及びそれを用いた搬送物の位置決め及び/又は搬送を行う搬送装置に関する。
【背景技術】
【0002】
従来、生産現場において、限られたスペース内で直進移動してくる搬送物(例えば、製品や半製品)を別の方向に向けて直進移動させようとする場合、搬送物に方向性がない場合は、例えば、方向転換場所に対して上流側搬送装置と下流側搬送装置を段違いに設置し、方向転換場所に搬送物の昇降装置を設けて、上流側搬送装置から受入れた搬送物を昇降して下流側搬送装置に載せ換えている。また、搬送物に方向性がある場合は、方向転換場所に対して上流側搬送装置と下流側搬送装置を同一高さ位置に設置し、方向転換場所に搬送物の旋回装置を設けて、上流側搬送装置から受入れた搬送物の方向を下流側搬送装置の搬送方向に対して調整してから下流側搬送装置に載せ換えている。このため、上流側搬送装置から下流側搬送装置に搬送物を受け渡すのに時間を要するという問題が生じる。そして、搬送物が大きくなる程、また搬送物が重くなる程、昇降装置や旋回装置が大型化して搬送設備コストが上昇すると共に、搬送物の受け渡し時間が長くなるという問題が生じる。
【0003】
そこで、例えば、特許文献1に示すように、方向転換場所に、円盤状の回転体の上に当接配置されて回転する球体を備えた装置を複数並べて設置し、上流側搬送装置から送出された搬送物が方向転換場所に払出されて複数の装置により支持された際、各装置の円盤状の回転体を球体に対して移動し、球体との接触位置を変えることで球体の回転方向を変化させて搬送物の方向を変え、次いで、円盤状の回転体を球体に対して再度移動して、球体の回転方向を下流側搬送装置の受入れ側に向けることにより、搬送物を下流側搬送装置に載せ換えることが開示されている。
【0004】
また、特許文献2には、球体と、球体の径より小さい開口を有し、少なくとも開口部に弾性効果を有して球体を収納するハウジングと、圧電素子を三角トラス状に組合わせてその頂点部に摩擦面を有し、摩擦面がハウジングに収納された球体の表面に開口に対向する方向から接触するように配設され、球体の接線方向に運動することにより球体を2次元に駆動する駆動体とを備え、開口部で球体を駆動体に押し付けて摩擦力を増大させて一部が開口から露出した球体を任意の方向に回転させる2自由度球体駆動装置が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−34008号公報
【特許文献2】特許第2993427号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の装置では、上流側搬送装置から受入れた搬送物の方向転換を行う際及び方向転換が終了してから搬送物を下流側搬送装置に送出す際に、それぞれ円盤状の回転体を移動しなければならないので、搬送物の受入れ、搬送物の方向転換、及び搬送物の送出しの各動作が不連続となって、上流側搬送装置から下流側搬送装置に搬送物を受け渡すのに時間を要するという問題がある。また、円盤状の回転体上での球体の高精度の位置決めと、円盤状の回転体上での球体のスリップを防止した回転が達成されないと、球体の回転方向を高精度に制御して搬送物を駆動することができず、高精度で搬送物の位置決めを行う場合、円盤状の回転体の駆動制御系が複雑になって設備コストが上昇するという問題がある。更に、球体上に搬送物が載置された状態で、球体に当接している円盤状の回転体を移動させるため、球体及び円盤状の回転体がそれぞれ磨耗し易く、メンテナンス負担が大きくなるという問題が生じる。また、球体及び円盤状の回転体が磨耗すると、球体が円盤状の回転体上で一様に回転することが困難になって、搬送物を所定方向に安定して送出すこと及び搬送物の方向転換を円滑かつ精度よく行うことが困難になる。
【0007】
一方、特許文献2に記載の2自由度球体駆動装置においては、開口から露出した球体の上端に接触する搬送物を、球体の回転方向を制御することにより所定の方向に向けて駆動することができるが、球体に接触する搬送物の重量が重くなると、圧電素子を三角トラス状に組合わせ形成した摩擦面が押圧されて変形し、球体を所定の方向に回転させることが困難になるという問題が生じる。また、摩擦面の変形を抑制するため圧電素子を剛性の高い部材で支持すると、圧電素子の振動を球体に伝達することが困難になって、球体を効率的に回転させることができないという問題が生じる。
【0008】
本発明はかかる事情に鑑みてなされたもので、シンプルな構造を有し、低コストでかつ短時間で搬送物の方向転換、位置決めを精度よく行うことが可能な球体駆動モジュール及びそれを用いた搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記目的に沿う第1の発明に係る球体駆動モジュールは、底が平坦な搬送物の下面に当接して回転可能な球体と、該球体を回転駆動する駆動機構と、前記球体を回転可能に保持する球体保持部材と、前記球体保持部材及び前記駆動機構を載置する基台と、複数の支持部材を介して前記基台に取付けられて、前記球体保持部材及び前記駆動機構を覆うと共に、上面に形成された開口部から前記球体の上部を露出させるカバー部材とを有する球体駆動モジュールであって、
前記駆動機構は、平面視して前記球体(前記球体の中心を通る水平面と該球体の表面とが交わって形成される大円)の中心に向けて直交する方向から該球体(該大円の円周)に当接する第1、第2の駆動輪と、前記第1、第2の駆動輪をそれぞれ回転駆動する第1、第2の回転駆動源と、前記球体(前記大円)を挟んで前記第1、第2の駆動輪とそれぞれ対向して設けられ、回転自由に保持された第1、第2の補助受け部材とを備え、しかも、前記球体の少なくとも表層部はゴム又は樹脂からなっている。
ここで、前記第1、第2の補助受け部材としては、補助輪の他、自在回転ボール、滑り軸受け等がある。
【0010】
第1の発明に係る球体駆動モジュールにおいて、前記第1、第2の駆動輪が前記球体に当接する部分は、凸断面円弧状となっていることが好ましい。
また、前記第1、第2の駆動輪が前記球体に当接する部分は、ゴム、樹脂、金属、又はこれらの2以上から構成することができる。
【0011】
第1の発明に係る球体駆動モジュールにおいて、前記第1、第2の補助受け部材は、第1、第2の補助輪であって、該第1、第2の補助輪が前記球体に当接する部分は、金属からなることが好ましい。
ここで、前記第1、第2の補助輪は、前記球体の中心に向けて該第1、第2の補助輪が移動可能な第1、第2のスライド機構をそれぞれ備え、更に、前記第1、第2の補助輪はそれぞれ弾性部材によって、前記球体の中心方向に押圧されていることが好ましい。
【0012】
第1の発明に係る球体駆動モジュールにおいて、前記球体に対して直交方向から当接する前記第1、第2の補助輪の中央位置に、前記球体に当接する第3の補助輪を設けることができる。
ここで、前記第3の補助輪は、前記球体の中心に向けて該第3の補助輪が移動可能な第3のスライド機構を備え、更に、前記第3の補助輪は、弾性部材によって前記球体の中心方向に押圧され、しかも、前記球体に当接する部分は金属からなっていることが好ましい。
【0013】
前記目的に沿う第2の発明に係る球体駆動モジュールを用いた搬送装置は、第1の発明に係る球体駆動モジュールを、前記カバー部材の前記開口部から突出する前記球体の上端を上方に向け、該球体の上端の高さ位置を同一平面上に合わせて少なくとも3つ、取付けベースに設けている。
なお、ここで、本発明に係る搬送装置は、搬送物を移動(直線移動、方向転換)させる場合の他、搬送物の位置決めを行う場合も含まれる。
【0014】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、前記各球体駆動モジュールの前記球体の上端は、平面視して前記取付けベースの中心から一定距離の円周上に等間隔に配置されていることが好ましい。
【0015】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、前記第1、第2の回転駆動源には減速機を設けることができる。
【発明の効果】
【0016】
第1の発明に係る球体駆動モジュール及び第2の発明に係る球体駆動モジュールを用いた搬送装置においては、平面視して球体の中心に向けて直交する方向から球体に当接する第1、第2の駆動輪を有するので、第1、第2の駆動輪を同時に又は交互にそれぞれ回転させることで、球体を任意の方向に応答性よく回転することができる。なお、第1、第2の駆動輪を交互に微小回転すると、球体と第1、第2の駆動輪との間に滑りを生じることなく駆動させることができる。また、第1、第2の駆動輪を同時に回転させると、第1、第2の駆動輪の合成ベクトル方向に球体を駆動することができる。
ここで、球体が、第1、第2の駆動輪と第1、第2の補助受け部材より挟まれているので、球体の中心位置を一定に保って球体を回転することができ、球体の回転方向を安定化することができる。また、球体の少なくとも表層部はゴム又は樹脂からなるため、搬送物との間でスリップが生じ難く、搬送物に駆動力を確実に伝達することができる。その結果、下面が球体の上端に当接している搬送物を、球体の上端の回転方向に向けて駆動(押し出す)ことができ、短時間で搬送物の方向転換や位置決めを精度よく行うことができる。
また、第1、第2の駆動輪は、平面視して球体(球体の中心を通る水平面と球体の表面とが交わって形成される大円)の中心に向けて直交する方向から球体(球体の大円)に当接し、第1、第2の補助受け部材は球体(球体の大円)を挟んで第1、第2の駆動輪とそれぞれ対向しているので、基台からカバー部材を取外して球体を露出させると、この球体を上方に向けて取外すことができ、球体の交換を容易に行うことができる。
更に、駆動機構は、第1、第2の駆動輪と、第1、第2の回転駆動源と、第1、第2の補助受け部材とを備えたシンプルな構造のため、低コストで製作することができる。
【0017】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の駆動輪が球体に当接する部分が、凸断面円弧状となっている場合、球体の表面に現れる第1、第2の駆動輪の当接部の軌跡が線状となって、球体を円滑に回転することができる。
【0018】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の駆動輪が球体に当接する部分が、1)ゴム、2)樹脂、又は3)ゴム、樹脂、及び金属の2以上からなる場合、球体と第1、第2の駆動輪との間でスリップが生じ難く、球体に駆動力を確実に伝達することができる。
また、第1、第2の駆動輪が球体に当接する部分が、金属からなる場合、第1、第2の駆動輪の磨耗を防止できる。
【0019】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の補助受け部材が、第1、第2の補助輪であって、第1、第2の補助輪が球体に当接する部分が、金属からなる場合、第1、第2の補助輪と球体との間でスリップが生じやすくなって、球体を円滑に回転することができる。
【0020】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の補助輪が、球体の中心に向けて第1、第2の補助輪が移動可能な第1、第2のスライド機構をそれぞれ備え、更に、第1、第2の補助輪がそれぞれ弾性部材によって、球体の中心方向に押圧されている場合、第1、第2の補助輪を球体に常に当接させることができ、第1、第2の駆動輪との間で球体を安定して保持することができる。また、第1、第2の補助輪の直径が変化しても球体に当接させることができ、第1、第2の補助輪の寸法許容範囲を大きく確保でき、第1、第2の補助輪の製作コストを低減することができる。
【0021】
第1の発明に係る球体駆動モジュールにおいて、球体に対して直交方向から当接する第1、第2の補助輪の中央位置に、球体に当接する第3の補助輪を設けた場合、球体の中心位置のずれを更に防止して球体を回転することができる。このため、搬送物の重量が増しても、球体を任意の方向に安定して回転することができる。
【0022】
第1の発明に係る球体駆動モジュールにおいて、第3の補助輪が、球体の中心に向けて第3の補助輪が移動可能な第3のスライド機構を備え、更に、第3の補助輪が、弾性部材によって球体の中心方向に押圧されている場合、第3の補助輪を球体に常に当接させることができ、第1、第2の駆動輪及び第1、第2の補助輪との間で球体を安定して保持することができる。また、第3の補助輪の直径が変化しても球体に当接させることができ、第3の補助輪の寸法許容範囲を大きく確保でき、第3の補助輪の製作コストを低減することができる。
また、球体に当接する部分が金属からなっている場合、第3の補助輪と球体との間でスリップが生じやすくなって、球体を円滑に回転することができる。
【0023】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、各球体駆動モジュールの球体の上端が、平面視して取付けベースの中心から一定距離の円周上に等間隔に配置されている場合、搬送物の直進又はその場回転においては、各球体駆動モジュールの操作条件を同一にすることができ、制御が容易になる。
【0024】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、第1、第2の回転駆動源に減速機が設けられている場合、第1、第2の駆動輪の回転角度を精度よく制御することができ、球体の回転角度の制御が容易になる。その結果、搬送物を所定の駆動方向に向けて駆動することができ、搬送物の高精度位置決めが可能になる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施の形態に係る球体駆動モジュールの平面図である。
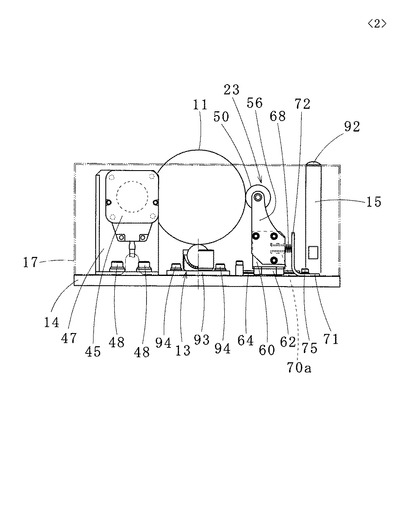
【図2】同球体駆動モジュールの一部省略正面図である。
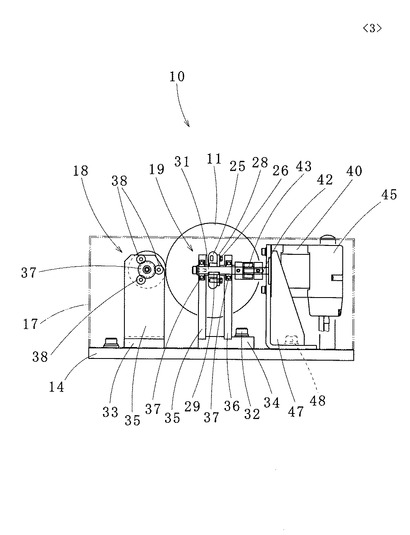
【図3】同球体駆動モジュールの一部省略左側面図である。
【図4】同球体駆動モジュールの一部省略右側面図である。
【図5】第1の駆動輪の説明図である。
【図6】第2の駆動輪の説明図である。
【図7】第1の補助輪の説明図である。
【図8】第2の補助輪の説明図である。
【図9】第3の補助輪の説明図である。
【図10】本発明の球体駆動モジュールを用いた第1、第2の実施の形態に係る搬送装置から形成された搬送設備の平面図である。
【図11】同搬送設備の一部省略正面図である。
【図12】第1の実施の形態に係る搬送装置の側面図である。
【図13】第2の実施の形態に係る搬送装置の一部省略側面図である。
【発明を実施するための形態】
【0026】
続いて、添付した図面を参照しつつ、本発明を具体化した実施の形態につき説明し、本発明の理解に供する。
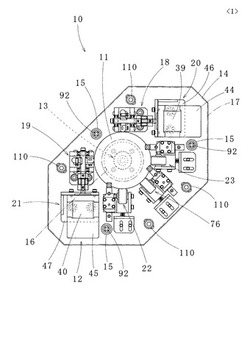
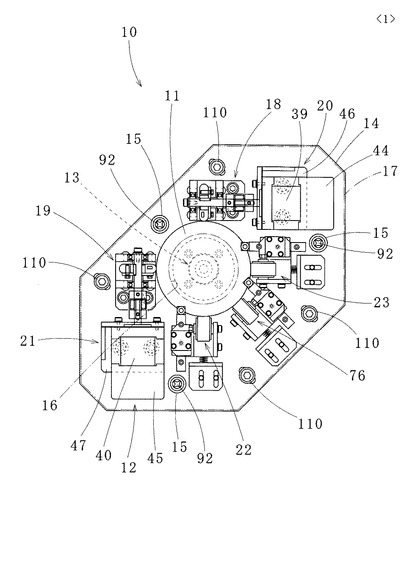
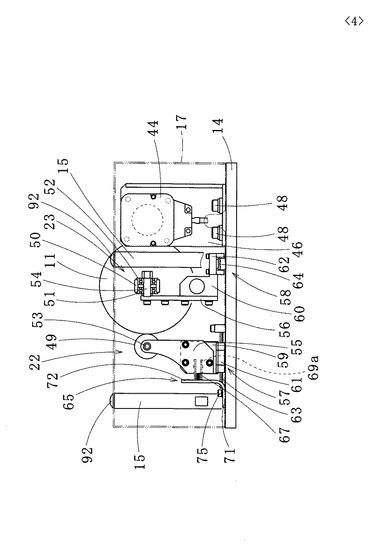
本発明の一実施の形態に係る球体駆動モジュール10は、図1、図2に示すように、底が平坦な搬送物(図示せず)の下面に当接して回転可能な球体11と、球体11を回転駆動する駆動機構12と、球体11を回転可能に保持する球体保持部材の一例である玉軸受け(ボールベアリング)13と、玉軸受け13及び駆動機構12を載置する平板状の基台14と、複数(本実施の形態では3つ)の支持部材15を介して基台14に取付けられて、玉軸受け13及び駆動機構12を覆うと共に、上面に形成された開口部16から球体11の上部を露出させるカバー部材17とを有している。
【0027】
ここで、駆動機構12は、平面視して球体11の中心に向けて直交する方向から球体11に当接する第1、第2の駆動輪18、19と、第1、第2の駆動輪18、19をそれぞれ回転駆動する第1、第2の回転駆動源20、21とを備えている。更に、駆動機構12は、球体11を挟んで第1、第2の駆動輪18、19とそれぞれ対向して設けられ、回転自由に保持された第1、第2の補助輪(第1、第2の補助受け部材の一例)22、23を備えている。以下、詳細に説明する。
【0028】
球体11は、例えば、球状の芯材と、芯材を被覆して、搬送物の下面に当接する表層部とを有している。ここで、芯材は、例えば、金属で形成され、表層部は、ゴム(例えばウレタン)又は樹脂(例えばポリアセタール)から形成することができる。また、球体11の直径は50〜150mmの範囲であって、例えば76mmmである。ここで、球体11の表層部がゴム又は樹脂から形成されているので、搬送物との間でスリップが生じ難く、球体11の回転力を物体に確実に伝達することができる。なお、搬送物の下面が平坦でない場合は、例えば、搬送物を下面が平坦なパレットを介して球体11に当接させればよい。
【0029】
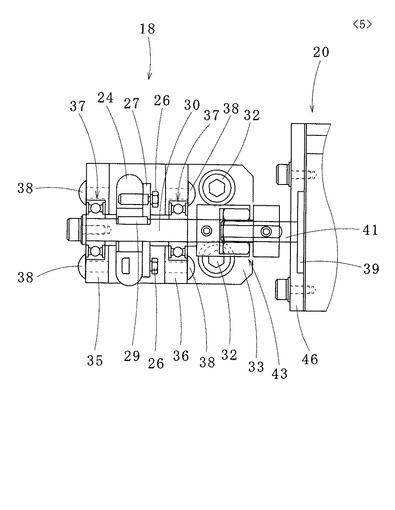
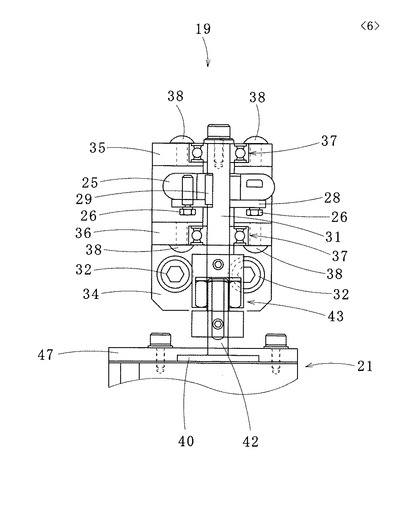
図1、図3、図5、図6に示すように、第1、第2の駆動輪18、19はそれぞれ、環状で球体11に当接する外周側が凸断面円弧状となってゴム(例えばウレタン)又は樹脂(例えばポリアセタール)から形成されたタイヤ部材24、25と、タイヤ部材24、25の内側に嵌入される軸部と軸部の一方側に連接して設けられ、タイヤ部材24、25の一方の側部に当接して締結部材26(例えばボルト)を介して固定されるつば部を備えた環状のホイール27、28と、ホイール27、28の軸部を貫通し、掛止部材29(例えば平行キー)を介して固定された車軸30、31とを有している。
【0030】
そして、車軸30、31の両側は、基台14上に締結部材の一例であるボルト32を介して固定された取付け台33、34を介して立設された対となる車軸支持部材35、36に軸受け37を介して回転可能に支持されている。ここで、車軸30、31の軸心は、球体11の上下方向中心を通る水平面上にあって、球体11の上下方向中心を通る水平面と球体11の表面とが交わって形成される大円の外側で直交している。このため、第1、第2の駆動輪18、19は、平面視して球体11の大円の中心に向けて直交する方向から球体11の大円に当接している。なお、符号38は、軸受け37を車軸支持部材35、36にそれぞれ取付けている締結部材(例えばボルト)である。
【0031】
第1、第2の回転駆動源20、21は、例えば、エンコーダ付きのパルスモータ39、40を有し、パルスモータ39、40の出力軸41、42が、第1、第2の駆動輪18、19の車軸30、31の一端側とカップリング43を介して接続している。なお、符号44,45はパルスモータ39、40のドライバ、符号46、47はパルスモータ39、40を基台14にそれぞれ取付けるモータ取付け部材、符号48はモータ取付け部材46、47を基台14に取付けるボルト(締結部材の一例)である。なお、エンコーダ付きのパルスモータ39、40の代わりに、エンコーダ付きのサーボモータを使用してもよい。
【0032】
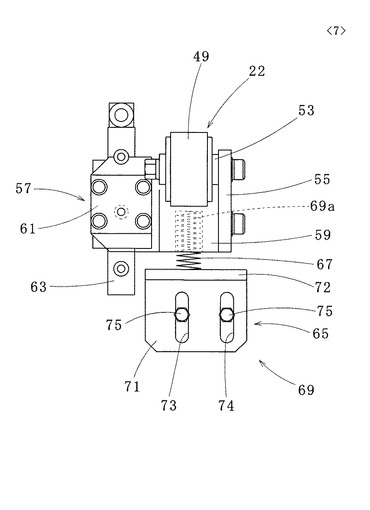
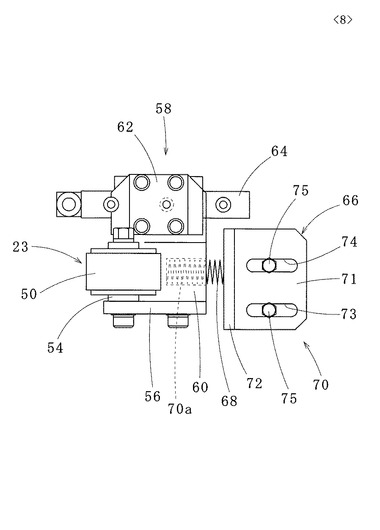
図1、図2、図4、図7、図8に示すように、第1、第2の補助輪22、23は、球体11に当接する金属製の円筒体49、50と、円筒体49、50の中央部を軸心方向に貫通し、円筒体49、50の内周面に軸心方向に並べて取付けられた対となる軸受け51、52を介して設けられた支持軸53、54とを有している。更に、第1、第2の補助輪22、23は、支持軸53、54の一側を固定して支持軸53、54を水平に保持する支持部材55、56と、支持部材55、56を介して円筒体49、50を、球体11を挟んでタイヤ部材24、25とそれぞれ対向させながら球体11の中心に向けて移動する第1、第2のスライド機構57、58とを備えている。
【0033】
第1、第2のスライド機構57、58は、円筒体49、50の支持軸53、54の一方側を保持する支持部材55、56が連結部材59、60を介して取付けられたスライド台車61、62と、基台14上に取付けられてスライド台車61、62の移動方向を定めるレール部材63、64とを有している。これによって、スライド台車61、62の移動に伴って、スライド台車61、62に取付けられた支持部材55、56に保持された支持軸53、54で支持された円筒体49、50を、球体11を挟んでタイヤ部材24、25とそれぞれ対向しながら球体11の中心に向けて進退することができる。
【0034】
更に、スライド台車61、62に取付けられた連結部材59、60の他方側(球体11に対向しない側)には、基台14に取付けられた固定金具65、66が設けられている。そして、連結部材59、60と固定金具65、66の間に圧縮状態でバネ67、68(弾性部材の一例)を配置することで、連結部材59、60を介して、支持部材55、56に保持された円筒体49、50(第1、第2の補助輪22、23)をそれぞれ球体11の中心方向に押圧する付勢手段69、70を構成している。なお、連結部材59、60には、バネ67、68の一端側が嵌入する穴69a、70aが設けられている。
【0035】
ここで、固定金具65、66は、断面視してL字状となって、水平部71が基台14に固定され、垂直部72が立設状態で連結部材59、60に対向している。また、水平部71には、平面視して球体11の中心と円筒体49、50の長手方向(軸心方向)中心とを通過する直線に平行な複数(例えば2つ)の長孔73、74が形成されている。これにより、長孔73、74にボルト75をそれぞれ挿通して基台14に形成された雌ネジ部(図示せず)に締め込むことにより、固定金具65、66を基台14に固定している。なお、雌ネジ部の位置に対して水平部71をスライドさせることにより、基台14上における垂直部72の立設位置を変化させて、平面視した際の球体11の中心と垂直部72との間の距離を調整することができ、球体11に押圧される第1、第2の補助輪22、23の加圧力を調整することができる。
【0036】
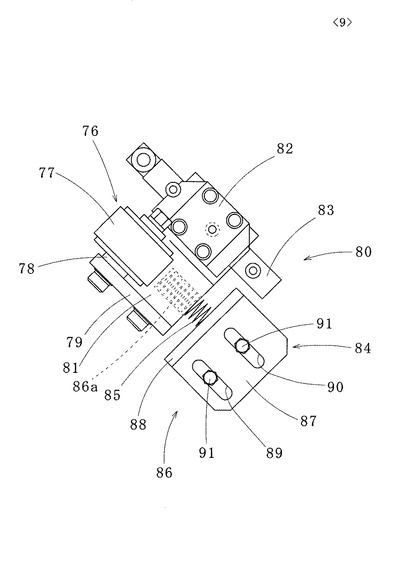
更に、球体駆動モジュール10には、図1、図9に示すように、球体11に対して直交方向から当接する第1、第2の補助輪22、23の中央位置(球体11の大円の円周に沿った周方向中央位置)に、球体11の大円に当接する第3の補助輪76が設けられている。ここで、第3の補助輪76は、球体11に当接する金属製の円筒体77と、円筒体77の中央部を軸心方向に貫通し、円筒体77の内周面に軸心方向に並べて取付けられた対となる軸受け(図示せず)を介して設けられた支持軸78とを有している。更に、第3の補助輪76は、支持軸78の一側を固定して支持軸78を水平に保持する支持部材79と、支持部材79を介して円筒体77を球体11の中心に向けて移動する第3のスライド機構80とを備えている。
【0037】
第3のスライド機構80は、円筒体77の支持軸78の一方側を保持する支持部材79が連結部材81を介して取付けられたスライド台車82と、基台14上に取付けられてスライド台車82の移動方向を定めるレール部材83とを有している。これによって、スライド台車82の移動に伴って、スライド台車82に取付けられた支持部材79に保持された支持軸78で支持された円筒体77を、球体11の中心に向けて進退することができる。
【0038】
更に、スライド台車82に取付けられた連結部材81の他方側(球体11に対向しない側)には、基台14に取付けられた固定金具84が設けられている。そして、連結部材81と固定金具84の間に圧縮状態でバネ85(弾性部材の一例)を配置することで、連結部材81を介して、支持部材79に保持された円筒体77(第3の補助輪76)を球体11の中心方向に押圧する付勢手段86を構成している。なお、連結部材81には、バネ85の一端側が嵌入する穴86aが設けられている。
【0039】
ここで、固定金具84は、断面視してL字状となって、水平部87が基台14に固定され、垂直部88が立設状態で連結部材81に対向している。また、水平部87には、平面視して球体11の中心と円筒体77の長手方向(軸心方向)中心とを通過する直線に平行な複数(例えば2つ)の長孔89、90が形成されている。これにより、長孔89、90にボルト91をそれぞれ挿通して基台14に形成された雌ネジ部(図示せず)に締め込むことにより、固定金具84を基台14に固定している。なお、雌ネジ部の位置に対して水平部87をスライドさせることにより、基台14上における垂直部88の立設位置を変化させて、平面視した際の球体11の中心と垂直部88との間の距離を調整することができ、球体11に押圧される第3の補助輪76の加圧力を調整することができる。
【0040】
カバー部材17は、平面視して基台14と同一形状であって、下方に開口し、天井部に開口部16が形成された箱状物である。また、カバー部材17を基台14に取付ける複数(本実施の形態では3つ)の支持部材15は、例えば、基台14上に立設された同一高さの支柱であって、支柱上端部の中央部には、雌ネジ部(図示せず)がそれぞれ形成されている。ここで、支持部材15の高さは、基台14に玉軸受け13を介して保持された球体11の上端の高さより低い。このため、支持部材15の上方から開口側を基台14に向けてカバー部材17を下降すると、カバー部材17の天井部の下面が支持部材15の上端面で支えられ、天井部の開口部16から球体11の上部が露出した状態になる。そして、天井部に形成された貫通孔(図示せず)に締結部材の一例である雄ネジ部材(ビス)92を挿通して雌ネジ部にねじ込むことにより、カバー部材17が支持部材15を介して基台14に取付けられる。
なお、符号93は玉軸受け13を取付ける支持台、符号94は支持台93を基台14に取付ける締結部材の一例であるボルトである。
【0041】
続いて、本発明の一実施の形態に係る球体駆動モジュール10の作用について説明する。球体駆動モジュール10では、平面視して球体11の中心に向けて直交する方向から球体11に当接する第1、第2の駆動輪18、19を有するので、第1、第2の駆動輪18、19を同時に又は交互にそれぞれ回転させることで、球体11を任意の方向に応答性よく回転することができる。ここで、球体11が、第1、第2の駆動輪18、19と第1、第2の補助輪(第1、第2の補助受け部材の一例)22、23により挟まれているので、球体11の中心位置を一定に保って球体11を回転することができ、球体11の回転方向を安定化することができる。また、球体11の少なくとも表層部はゴム又は樹脂からなるため、搬送物との間でスリップが生じ難く、搬送物に駆動力を確実に伝達することができる。その結果、下面が球体11の上端に当接している搬送物を、球体11の上端の回転方向に向けて駆動(押し出す)ことができる。
【0042】
第1、第2の駆動輪18、19は、平面視して球体11(球体11の中心を通る水平面と球体11の表面とが交わって形成される大円)の中心に向けて直交する方向から球体11(大円の円周)に当接し、第1、第2の補助輪22、23は球体11(大円)を挟んで第1、第2の駆動輪18、19とそれぞれ対向しているので、基台14からカバー部材17を取外して球体11を露出させると、この球体11を上方に向けて移動させることができ、球体11を取外すことができ、球体11の交換を容易に行うことができる。
【0043】
第1、第2の駆動輪18、19の球体11に当接する部分が、凸断面円弧状となっているので、球体11の表面に現れる第1、第2の駆動輪18、19の当接部の軌跡が線状となって、球体11を円滑に回転することができる。ここで、第1、第2の駆動輪18、19が球体11に当接する部分が、ゴム又は樹脂からなっているので、球体11と第1、第2の駆動輪18、19との間でスリップが生じ難く、球体11に駆動力を確実に伝達することができる。また、第1、第2の補助輪22、23が球体11に当接する部分が、金属からなるので、第1、第2の補助輪22、23と球体11との間でスリップが生じやすくなって、球体11を円滑に回転することができる。
【0044】
ここで、第1、第2の補助輪22、23が、球体11の中心に向けて第1、第2の補助輪22、23が移動可能な第1、第2のスライド機構57、58をそれぞれ備え、更に、第1、第2の補助輪57、58がバネ87、68によって、球体11の中心方向に押圧されているので、第1、第2の補助輪22、23を球体11に常に当接させることができ、第1、第2の駆動輪18、19との間で球体11を安定して保持することができる。また、第1、第2の補助輪22、23の直径が変化しても球体11に当接させることができ、第1、第2の補助輪22、23の寸法許容範囲を大きく確保できる。
【0045】
そして、球体11に対して直交方向から当接する第1、第2の補助輪22、23の中央位置に、球体11に当接する第3の補助輪76が設けられているので、球体11の中心位置のずれを更に防止して球体11を回転することができる。このため、搬送物の重量が増しても、球体11を任意の方向に安定して回転することができる。ここで、第3の補助輪76が、球体11の中心に向けて第3の補助輪76が移動可能な第3のスライド機構80を有し、更に、第3の補助輪76が、バネ85によって球体11の中心方向に押圧されているので、第3の補助輪76を球体11に常に当接させることができ、第1、第2の駆動輪18、19及び第1、第2の補助輪22、23と連携して球体11を安定して保持することができる。また、第3の補助輪76の直径が変化しても球体11に当接させることができ、第3の補助輪76の寸法許容範囲を大きく確保できる。そして、球体11に当接する部分が金属からなっているので、第3の補助輪76と球体11との間でスリップが生じやすくなって、球体11を円滑に回転することができる。
【0046】
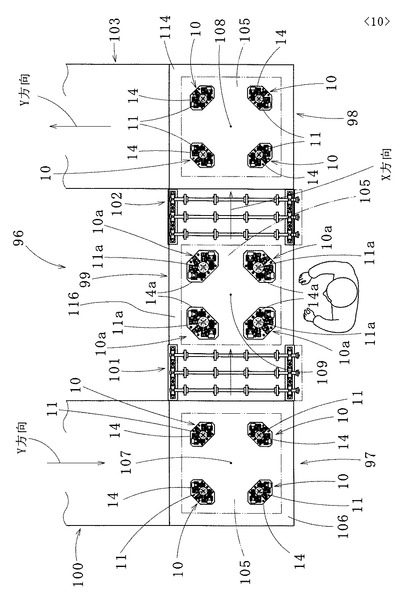
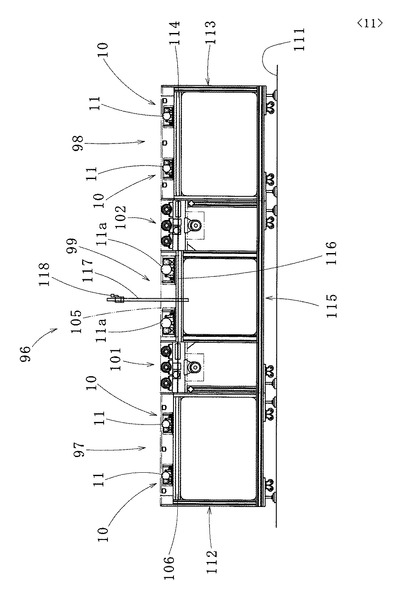
続いて、図10、図11に示すように、球体駆動モジュール10を用いた搬送設備96について説明する。この搬送設備96は、4個(即ち、少なくとも3個以上)の球体駆動モジュール10を用いた第1の実施の形態に係る搬送装置97、98(第1、第2の搬送装置という)と、4個(即ち、少なくとも3個以上)の球体駆動モジュール10aを用いた第2の実施の形態に係る搬送装置99(第3の搬送装置という)を有している。
【0047】
第1の搬送装置97の上流側には、ベルトコンベア、ローラコンベア、又はチェーンコンベアからなる第1の搬送手段100を備え、第1の搬送装置97と第3の搬送装置99の間には第2の搬送手段の一例であるローラコンベア101を、第3の搬送装置99と第2の搬送装置98の間には第3の搬送手段の一例であるローラコンベア102を有し、更に、第2の搬送装置98の下流側には、ベルトコンベア、ローラコンベア又はチェーンコンベアからなる第4の搬送手段103を備えている。
【0048】
なお、第1、第2の搬送装置97、98と第3の搬送装置99に用いている球体駆動モジュール10、10aの主な相違点は、球体駆動モジュール10aにおいては、球体駆動モジュール10に使用した球体11の直径より大きい(例えば、1.2〜1.5倍)球体11aが使用されていること、球体駆動モジュール10aの基台14aが球体駆動モジュール10の基台14より大きくなっていること、球体駆動モジュール10では第1、第2の回転駆動源20、21に減速機がなく、球体駆動モジュール10aでは第1、第2の回転駆動源に減速機が設けられていることである。これによって、第3の搬送装置99の方が第1、第2の搬送装置97、98に比較して、球体11aの細密な回転制御ができることになる。
【0049】
底が平坦な搬送物の一例である平面視して矩形形状の板状物105を、1)第1の搬送手段100によって第1の搬送装置97に搬送し(即ち、Y方向に搬送)、2)第1の搬送装置97で直角方向に方向を変えて、ローラコンベア101から第3の搬送装置99に搬送し(即ち、X方向に搬送)、ここで、第3の搬送装置99を用いてこの板状物105のXY方向の位置合わせ(位置決め)を行い、3)更にローラコンベア102を用いて、第2の搬送装置98に移載して方向転換(即ち、Y方向に搬送)を行い、第4の搬送手段103で払い出すようにしている。
【0050】
以下、これらを用いた、第1〜第3の搬送装置97〜99及びこれに付帯する装置について詳細に説明する。なお、平面視した第1、第2の搬送装置97、98、第3の搬送装置99の中心位置をそれぞれ107〜109とする。
【0051】
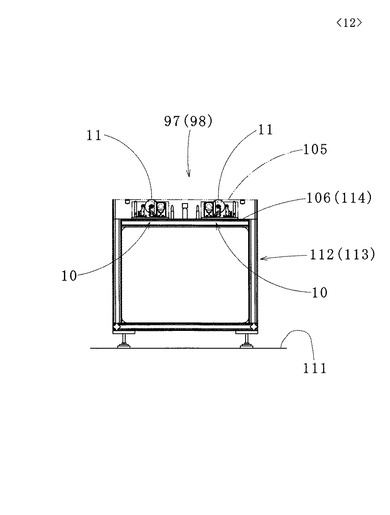
第1の搬送装置97は、図10〜図12に示すように、4つの球体駆動モジュール10を、カバー部材17の開口部16から突出する球体11の上端を上方に向けて、平面視した際の中心位置が第1の搬送装置97の中心位置107に一致するように搬送設備96を設置する床面111上に取付け架台112を介して配置された取付けベース106に取付けることにより形成されている。なお、図1に示す符号110は、球体駆動モジュール10の基台14を取付けベース106に固定する締結部材の一例であるボルトである。
【0052】
ここで、取付けベース106は、取付け架台112に配置する際に、床面111に対する高さ位置と、第1の搬送手段100及びローラコンベア101に対する水平位置が調整されて、取付けベース106に取付けられた各球体駆動モジュール10の球体11の上端の高さ位置を、第1の搬送手段100及びローラコンベア101の搬送面、即ち、搬送中の板状物105の底面が移動する面(同一平面の一例)上に合わせると共に、取付けベース106の中心位置を、第1の搬送手段100の搬送方向中心線(第1の搬送手段100の搬送方向に沿って第1の搬送手段100の幅方向(搬送方向に直交する方向)中心を通過する直線)と、ローラコンベア101の搬送方向中心線(ローラコンベア101の搬送方向に沿ってローラコンベア101の幅方向(搬送方向に直交する方向)中心を通過する直線)との交点位置に合わせている。更に、球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31のいずれか一方を、第1の搬送手段100の搬送方向に沿って配置する。したがって、取付けベース106にそれぞれ取付けられた球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31の他方は、ローラコンベア101の搬送方向に沿って(即ち、第1の搬送手段100の搬送方向に直交する方向に)配置される。
【0053】
また、各球体駆動モジュール10は、球体駆動モジュール10の球体11の上端が、取付けベース106の中心から一定距離の円周(ただし、平面視した板状物105より小さな円周)上に等間隔、例えば、取付けベース106の中心から一定距離の円周と取付けベース106の2本の対角線との交点位置(円周を4等分する位置)に合わせてそれぞれ配置することが好ましい。これによって、第1の搬送手段100によって、板状物105が、板状物105の中心が第1の搬送装置97の中心に略一致するように送出されると、板状物105を各球体駆動モジュール10で均等に支えることができる。その結果、第1の搬送装置97により、板状物105を精度よく直角方向に方向を変えて移動させることができ、板状物105をローラコンベア101の搬送方向中心線に沿って押し出すことができる。
【0054】
第2の搬送装置98は、図10〜図12に示すように、4つの球体駆動モジュール10を、カバー部材17の開口部16から突出する球体11の上端を上方に向けて、平面視した際の中心位置が第2の搬送装置98の中心位置108に一致するように搬送設備96を設置する床面111上に取付け架台113を介して配置された取付けベース114に、ボルト110を介して取付けることにより形成されている。
【0055】
ここで、取付けベース114は、取付け架台113に配置する際に、床面111に対する高さ位置と、ローラコンベア102及び第4の搬送手段103に対する水平位置が調整されて、取付けベース114に取付けられた各球体駆動モジュール10の球体11の上端の高さ位置を、ローラコンベア102及び第4の搬送手段103の搬送面、即ち、搬送中の板状物105の底面が移動する面(同一平面の一例)上に合わせると共に、取付けベース114の中心位置を、ローラコンベア102の搬送方向中心線(ローラコンベア102の搬送方向に沿ってローラコンベア102の幅方向中心を通過する直線)と、第4の搬送手段103の搬送方向中心線(第4の搬送手段103の搬送方向に沿って第4の搬送手段103の幅方向中心を通過する直線)との交点位置に合わせている。更に、球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31のいずれか一方を、ローラコンベア102の搬送方向に沿って配置する。したがって、取付けベース114にそれぞれ取付けられた球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31の他方は、第4の搬送手段103の搬送方向に沿って(即ち、ローラコンベア102の搬送方向に直交する方向に)配置される。
なお、ローラコンベア102は、ローラコンベア102の搬送方向中心線が、ローラコンベア101の搬送方向中心線と一致するように配置されている。
【0056】
また、各球体駆動モジュール10は、球体駆動モジュール10の球体11の上端が、取付けベース114の中心から一定距離の円周(ただし、平面視した板状物105より小さな円周)上に等間隔、例えば、取付けベース114の中心から一定距離の円周と取付けベース114の2本の対角線との交点位置(円周を4等分する位置)に合わせてそれぞれ配置することが好ましい。これによって、ローラコンベア102によって、板状物105が、板状物105の中心が第2の搬送装置98の中心に略一致するように送出されると、板状物105を各球体駆動モジュール10で均等に支えることができる。その結果、第2の搬送装置98により、板状物105を精度よく直角方向に方向を変えて移動させることができ、板状物105を第4の搬送手段103の搬送方向中心線に沿って押し出すことができる。
【0057】
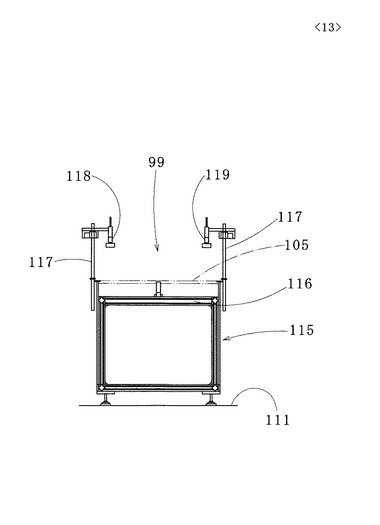
第3の搬送装置99は、図10、図11、図13に示すように、4つの球体駆動モジュール10aを、カバー部材17の開口部16から突出する球体11aの上端を上方に向けて、平面視した際の中心位置が第3の搬送装置99の中心位置109に一致するように搬送設備96を設置する床面111上に取付け架台115を介して配置された取付けベース116に、ボルト110を介して取付けることにより形成されている。
【0058】
ここで、取付けベース116は、取付け架台115に配置する際に、床面111に対する高さ位置と、ローラコンベア101、102に対する水平位置が調整されて、取付けベース116に取付けられた各球体駆動モジュール10aの球体11aの上端の高さ位置を、ローラコンベア101、102の搬送面、即ち、搬送中の板状物105の底面が移動する面(同一平面の一例)上に合わせると共に、取付けベース116の中心位置を、ローラコンベア101、102の搬送方向中心線上に合わせている。更に、球体駆動モジュール10aの第1、第2の駆動輪18、19の車軸30、31のいずれか一方を、ローラコンベア101、102の搬送方向に沿って(X方向に)配置する。したがって、取付けベース116にそれぞれ取付けられた球体駆動モジュール10aの第1、第2の駆動輪18、19の車軸30、31の他方は、ローラコンベア101、102の搬送方向に直交する方向に沿って(Y方向に)配置される。
【0059】
また、各球体駆動モジュール10aは、球体駆動モジュール10aの球体11aの上端が、取付けベース116の中心から一定距離の円周(ただし、平面視した板状物105より小さな円周)上に等間隔、例えば、取付けベース116の中心から一定距離の円周と取付けベース116の2本の対角線との交点位置(円周を4等分する位置)に合わせてそれぞれ配置することが好ましい。
これによって、ローラコンベア101によって、板状物105が、板状物105の中心が第3の搬送装置99の中心に略一致するように送出されると、板状物105を各球体駆動モジュール10aで均等に支えることができる。
【0060】
ここで、図11,図13に示すように、第3の搬送装置99上の板状物105の複数箇所を、取付けベース116の上方に保持部材117を介して設けた撮像手段118、119(カメラ)で撮影し、得られた画像と予め取得しておいた基準画像(板状物105が第3の搬送装置99上の設定した位置に載置された状態を撮影した画像)と比較することにより、ローラコンベア101から第3の搬送装置99上に送出された板状物105の位置ずれ量を把握することができる。
【0061】
したがって、第3の搬送装置99上での板状物105の位置ずれ量から、X方向のずれ成分Aと、Y方向のずれ成分Bをそれぞれ求めて、各球体駆動モジュール10aの一方の(X方向に沿った)車軸30、31の同期回転操作と、他方の(Y方向に沿った)車軸30、31の同期回転操作を組合わせて、ずれ成分A、Bが消失するように板状物105を移動させることにより、第3の搬送装置99上での板状物105の位置を設定した位置に修正する(位置決めする)ことができる。これにより、第3の搬送装置99上の板状物105に対して種々の処理を行うことができ、板状物105に対する処理が終了すると、板状物105をローラコンベア102の搬送方向中心線に沿って押し出すことができる。
【0062】
以上、本発明を、実施の形態を参照して説明してきたが、本発明は何ら上記した実施の形態に記載した構成に限定されるものではなく、特許請求の範囲に記載されている事項の範囲内で考えられるその他の実施の形態や変形例も含むものである。
例えば、第1、第2の駆動輪が球体に当接する部分を、ゴム又は樹脂から構成したが、金属から構成することも、ゴム、樹脂、及び金属の2以上を組合わせて構成することもできる。
また、4つの球体駆動モジュールを、球体駆動モジュールの球体の上端が、取付けベースの中心から一定距離の円周上に等間隔に配置した搬送装置を構成して、底が平坦な搬送物(板状物)を搬送する場合について説明したが、3つ以上(即ち、3個又は5個以上)の球体駆動モジュールを、搬送物の重心位置が各球体駆動モジュールの球体の上端を結んで形成される多角形の内側にあるように取付けベースに配置して、搬送装置を構成してもよい。
【符号の説明】
【0063】
10、10a:球体駆動モジュール、11、11a:球体、12:駆動機構、13:玉軸受け、14、14a:基台、15:支持部材、16:開口部、17:カバー部材、18:第1の駆動輪、19:第2の駆動輪、20:第1の回転駆動源、21:第2の回転駆動源、22:第1の補助輪、23:第2の補助輪、24、25:タイヤ部材、26:締結部材、27、28:ホイール、29:掛止部材、30、31:車軸、32:ボルト、33、34:取付け台、35、36:車軸支持部材、37:軸受け、38:締結部材、39、40:パルスモータ、41、42:出力軸、43:カップリング、44、45:ドライバ、46、47:モータ取付け部材、48:ボルト、49、50:円筒体、51、52:軸受け、53、54:支持軸、55、56:支持部材、57:第1のスライド機構、58:第2のスライド機構、59、60:連結部材、61、62:スライド台車、63、64:レール部材、65、66:固定金具、67、68:バネ、69:付勢手段、69a:穴、70:付勢手段、70a:穴、71:水平部、72:垂直部、73、74:長孔、75:ボルト、76:第3の補助輪、77:円筒体、78:支持軸、79:支持部材、80:第3のスライド機構、81:連結部材、82:スライド台車、83:レール部材、84:固定金具、85:バネ、86:付勢手段、86a:穴、87:水平部、88:垂直部、89、90:長孔、91:ボルト、92:雄ネジ部材、93:支持台、94:ボルト、96:搬送設備、97:搬送装置(第1の搬送装置)、98:搬送装置(第2の搬送装置)、99:搬送装置(第3の搬送装置)、100:第1の搬送手段、101、102:ローラコンベア、103:第4の搬送手段、105:板状物、106:取付けベース、107、108、109:中心位置、110:ボルト、111:床面、112、113:取付け架台、114:取付けベース、115:取付け架台、116:取付けベース、117:保持部材、118、119:撮像手段
【技術分野】
【0001】
本発明は、底が平坦な搬送物の下面に当接して回転可能な球体を備えた球体駆動モジュール及びそれを用いた搬送物の位置決め及び/又は搬送を行う搬送装置に関する。
【背景技術】
【0002】
従来、生産現場において、限られたスペース内で直進移動してくる搬送物(例えば、製品や半製品)を別の方向に向けて直進移動させようとする場合、搬送物に方向性がない場合は、例えば、方向転換場所に対して上流側搬送装置と下流側搬送装置を段違いに設置し、方向転換場所に搬送物の昇降装置を設けて、上流側搬送装置から受入れた搬送物を昇降して下流側搬送装置に載せ換えている。また、搬送物に方向性がある場合は、方向転換場所に対して上流側搬送装置と下流側搬送装置を同一高さ位置に設置し、方向転換場所に搬送物の旋回装置を設けて、上流側搬送装置から受入れた搬送物の方向を下流側搬送装置の搬送方向に対して調整してから下流側搬送装置に載せ換えている。このため、上流側搬送装置から下流側搬送装置に搬送物を受け渡すのに時間を要するという問題が生じる。そして、搬送物が大きくなる程、また搬送物が重くなる程、昇降装置や旋回装置が大型化して搬送設備コストが上昇すると共に、搬送物の受け渡し時間が長くなるという問題が生じる。
【0003】
そこで、例えば、特許文献1に示すように、方向転換場所に、円盤状の回転体の上に当接配置されて回転する球体を備えた装置を複数並べて設置し、上流側搬送装置から送出された搬送物が方向転換場所に払出されて複数の装置により支持された際、各装置の円盤状の回転体を球体に対して移動し、球体との接触位置を変えることで球体の回転方向を変化させて搬送物の方向を変え、次いで、円盤状の回転体を球体に対して再度移動して、球体の回転方向を下流側搬送装置の受入れ側に向けることにより、搬送物を下流側搬送装置に載せ換えることが開示されている。
【0004】
また、特許文献2には、球体と、球体の径より小さい開口を有し、少なくとも開口部に弾性効果を有して球体を収納するハウジングと、圧電素子を三角トラス状に組合わせてその頂点部に摩擦面を有し、摩擦面がハウジングに収納された球体の表面に開口に対向する方向から接触するように配設され、球体の接線方向に運動することにより球体を2次元に駆動する駆動体とを備え、開口部で球体を駆動体に押し付けて摩擦力を増大させて一部が開口から露出した球体を任意の方向に回転させる2自由度球体駆動装置が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−34008号公報
【特許文献2】特許第2993427号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の装置では、上流側搬送装置から受入れた搬送物の方向転換を行う際及び方向転換が終了してから搬送物を下流側搬送装置に送出す際に、それぞれ円盤状の回転体を移動しなければならないので、搬送物の受入れ、搬送物の方向転換、及び搬送物の送出しの各動作が不連続となって、上流側搬送装置から下流側搬送装置に搬送物を受け渡すのに時間を要するという問題がある。また、円盤状の回転体上での球体の高精度の位置決めと、円盤状の回転体上での球体のスリップを防止した回転が達成されないと、球体の回転方向を高精度に制御して搬送物を駆動することができず、高精度で搬送物の位置決めを行う場合、円盤状の回転体の駆動制御系が複雑になって設備コストが上昇するという問題がある。更に、球体上に搬送物が載置された状態で、球体に当接している円盤状の回転体を移動させるため、球体及び円盤状の回転体がそれぞれ磨耗し易く、メンテナンス負担が大きくなるという問題が生じる。また、球体及び円盤状の回転体が磨耗すると、球体が円盤状の回転体上で一様に回転することが困難になって、搬送物を所定方向に安定して送出すこと及び搬送物の方向転換を円滑かつ精度よく行うことが困難になる。
【0007】
一方、特許文献2に記載の2自由度球体駆動装置においては、開口から露出した球体の上端に接触する搬送物を、球体の回転方向を制御することにより所定の方向に向けて駆動することができるが、球体に接触する搬送物の重量が重くなると、圧電素子を三角トラス状に組合わせ形成した摩擦面が押圧されて変形し、球体を所定の方向に回転させることが困難になるという問題が生じる。また、摩擦面の変形を抑制するため圧電素子を剛性の高い部材で支持すると、圧電素子の振動を球体に伝達することが困難になって、球体を効率的に回転させることができないという問題が生じる。
【0008】
本発明はかかる事情に鑑みてなされたもので、シンプルな構造を有し、低コストでかつ短時間で搬送物の方向転換、位置決めを精度よく行うことが可能な球体駆動モジュール及びそれを用いた搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記目的に沿う第1の発明に係る球体駆動モジュールは、底が平坦な搬送物の下面に当接して回転可能な球体と、該球体を回転駆動する駆動機構と、前記球体を回転可能に保持する球体保持部材と、前記球体保持部材及び前記駆動機構を載置する基台と、複数の支持部材を介して前記基台に取付けられて、前記球体保持部材及び前記駆動機構を覆うと共に、上面に形成された開口部から前記球体の上部を露出させるカバー部材とを有する球体駆動モジュールであって、
前記駆動機構は、平面視して前記球体(前記球体の中心を通る水平面と該球体の表面とが交わって形成される大円)の中心に向けて直交する方向から該球体(該大円の円周)に当接する第1、第2の駆動輪と、前記第1、第2の駆動輪をそれぞれ回転駆動する第1、第2の回転駆動源と、前記球体(前記大円)を挟んで前記第1、第2の駆動輪とそれぞれ対向して設けられ、回転自由に保持された第1、第2の補助受け部材とを備え、しかも、前記球体の少なくとも表層部はゴム又は樹脂からなっている。
ここで、前記第1、第2の補助受け部材としては、補助輪の他、自在回転ボール、滑り軸受け等がある。
【0010】
第1の発明に係る球体駆動モジュールにおいて、前記第1、第2の駆動輪が前記球体に当接する部分は、凸断面円弧状となっていることが好ましい。
また、前記第1、第2の駆動輪が前記球体に当接する部分は、ゴム、樹脂、金属、又はこれらの2以上から構成することができる。
【0011】
第1の発明に係る球体駆動モジュールにおいて、前記第1、第2の補助受け部材は、第1、第2の補助輪であって、該第1、第2の補助輪が前記球体に当接する部分は、金属からなることが好ましい。
ここで、前記第1、第2の補助輪は、前記球体の中心に向けて該第1、第2の補助輪が移動可能な第1、第2のスライド機構をそれぞれ備え、更に、前記第1、第2の補助輪はそれぞれ弾性部材によって、前記球体の中心方向に押圧されていることが好ましい。
【0012】
第1の発明に係る球体駆動モジュールにおいて、前記球体に対して直交方向から当接する前記第1、第2の補助輪の中央位置に、前記球体に当接する第3の補助輪を設けることができる。
ここで、前記第3の補助輪は、前記球体の中心に向けて該第3の補助輪が移動可能な第3のスライド機構を備え、更に、前記第3の補助輪は、弾性部材によって前記球体の中心方向に押圧され、しかも、前記球体に当接する部分は金属からなっていることが好ましい。
【0013】
前記目的に沿う第2の発明に係る球体駆動モジュールを用いた搬送装置は、第1の発明に係る球体駆動モジュールを、前記カバー部材の前記開口部から突出する前記球体の上端を上方に向け、該球体の上端の高さ位置を同一平面上に合わせて少なくとも3つ、取付けベースに設けている。
なお、ここで、本発明に係る搬送装置は、搬送物を移動(直線移動、方向転換)させる場合の他、搬送物の位置決めを行う場合も含まれる。
【0014】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、前記各球体駆動モジュールの前記球体の上端は、平面視して前記取付けベースの中心から一定距離の円周上に等間隔に配置されていることが好ましい。
【0015】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、前記第1、第2の回転駆動源には減速機を設けることができる。
【発明の効果】
【0016】
第1の発明に係る球体駆動モジュール及び第2の発明に係る球体駆動モジュールを用いた搬送装置においては、平面視して球体の中心に向けて直交する方向から球体に当接する第1、第2の駆動輪を有するので、第1、第2の駆動輪を同時に又は交互にそれぞれ回転させることで、球体を任意の方向に応答性よく回転することができる。なお、第1、第2の駆動輪を交互に微小回転すると、球体と第1、第2の駆動輪との間に滑りを生じることなく駆動させることができる。また、第1、第2の駆動輪を同時に回転させると、第1、第2の駆動輪の合成ベクトル方向に球体を駆動することができる。
ここで、球体が、第1、第2の駆動輪と第1、第2の補助受け部材より挟まれているので、球体の中心位置を一定に保って球体を回転することができ、球体の回転方向を安定化することができる。また、球体の少なくとも表層部はゴム又は樹脂からなるため、搬送物との間でスリップが生じ難く、搬送物に駆動力を確実に伝達することができる。その結果、下面が球体の上端に当接している搬送物を、球体の上端の回転方向に向けて駆動(押し出す)ことができ、短時間で搬送物の方向転換や位置決めを精度よく行うことができる。
また、第1、第2の駆動輪は、平面視して球体(球体の中心を通る水平面と球体の表面とが交わって形成される大円)の中心に向けて直交する方向から球体(球体の大円)に当接し、第1、第2の補助受け部材は球体(球体の大円)を挟んで第1、第2の駆動輪とそれぞれ対向しているので、基台からカバー部材を取外して球体を露出させると、この球体を上方に向けて取外すことができ、球体の交換を容易に行うことができる。
更に、駆動機構は、第1、第2の駆動輪と、第1、第2の回転駆動源と、第1、第2の補助受け部材とを備えたシンプルな構造のため、低コストで製作することができる。
【0017】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の駆動輪が球体に当接する部分が、凸断面円弧状となっている場合、球体の表面に現れる第1、第2の駆動輪の当接部の軌跡が線状となって、球体を円滑に回転することができる。
【0018】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の駆動輪が球体に当接する部分が、1)ゴム、2)樹脂、又は3)ゴム、樹脂、及び金属の2以上からなる場合、球体と第1、第2の駆動輪との間でスリップが生じ難く、球体に駆動力を確実に伝達することができる。
また、第1、第2の駆動輪が球体に当接する部分が、金属からなる場合、第1、第2の駆動輪の磨耗を防止できる。
【0019】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の補助受け部材が、第1、第2の補助輪であって、第1、第2の補助輪が球体に当接する部分が、金属からなる場合、第1、第2の補助輪と球体との間でスリップが生じやすくなって、球体を円滑に回転することができる。
【0020】
第1の発明に係る球体駆動モジュールにおいて、第1、第2の補助輪が、球体の中心に向けて第1、第2の補助輪が移動可能な第1、第2のスライド機構をそれぞれ備え、更に、第1、第2の補助輪がそれぞれ弾性部材によって、球体の中心方向に押圧されている場合、第1、第2の補助輪を球体に常に当接させることができ、第1、第2の駆動輪との間で球体を安定して保持することができる。また、第1、第2の補助輪の直径が変化しても球体に当接させることができ、第1、第2の補助輪の寸法許容範囲を大きく確保でき、第1、第2の補助輪の製作コストを低減することができる。
【0021】
第1の発明に係る球体駆動モジュールにおいて、球体に対して直交方向から当接する第1、第2の補助輪の中央位置に、球体に当接する第3の補助輪を設けた場合、球体の中心位置のずれを更に防止して球体を回転することができる。このため、搬送物の重量が増しても、球体を任意の方向に安定して回転することができる。
【0022】
第1の発明に係る球体駆動モジュールにおいて、第3の補助輪が、球体の中心に向けて第3の補助輪が移動可能な第3のスライド機構を備え、更に、第3の補助輪が、弾性部材によって球体の中心方向に押圧されている場合、第3の補助輪を球体に常に当接させることができ、第1、第2の駆動輪及び第1、第2の補助輪との間で球体を安定して保持することができる。また、第3の補助輪の直径が変化しても球体に当接させることができ、第3の補助輪の寸法許容範囲を大きく確保でき、第3の補助輪の製作コストを低減することができる。
また、球体に当接する部分が金属からなっている場合、第3の補助輪と球体との間でスリップが生じやすくなって、球体を円滑に回転することができる。
【0023】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、各球体駆動モジュールの球体の上端が、平面視して取付けベースの中心から一定距離の円周上に等間隔に配置されている場合、搬送物の直進又はその場回転においては、各球体駆動モジュールの操作条件を同一にすることができ、制御が容易になる。
【0024】
第2の発明に係る球体駆動モジュールを用いた搬送装置において、第1、第2の回転駆動源に減速機が設けられている場合、第1、第2の駆動輪の回転角度を精度よく制御することができ、球体の回転角度の制御が容易になる。その結果、搬送物を所定の駆動方向に向けて駆動することができ、搬送物の高精度位置決めが可能になる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施の形態に係る球体駆動モジュールの平面図である。
【図2】同球体駆動モジュールの一部省略正面図である。
【図3】同球体駆動モジュールの一部省略左側面図である。
【図4】同球体駆動モジュールの一部省略右側面図である。
【図5】第1の駆動輪の説明図である。
【図6】第2の駆動輪の説明図である。
【図7】第1の補助輪の説明図である。
【図8】第2の補助輪の説明図である。
【図9】第3の補助輪の説明図である。
【図10】本発明の球体駆動モジュールを用いた第1、第2の実施の形態に係る搬送装置から形成された搬送設備の平面図である。
【図11】同搬送設備の一部省略正面図である。
【図12】第1の実施の形態に係る搬送装置の側面図である。
【図13】第2の実施の形態に係る搬送装置の一部省略側面図である。
【発明を実施するための形態】
【0026】
続いて、添付した図面を参照しつつ、本発明を具体化した実施の形態につき説明し、本発明の理解に供する。
本発明の一実施の形態に係る球体駆動モジュール10は、図1、図2に示すように、底が平坦な搬送物(図示せず)の下面に当接して回転可能な球体11と、球体11を回転駆動する駆動機構12と、球体11を回転可能に保持する球体保持部材の一例である玉軸受け(ボールベアリング)13と、玉軸受け13及び駆動機構12を載置する平板状の基台14と、複数(本実施の形態では3つ)の支持部材15を介して基台14に取付けられて、玉軸受け13及び駆動機構12を覆うと共に、上面に形成された開口部16から球体11の上部を露出させるカバー部材17とを有している。
【0027】
ここで、駆動機構12は、平面視して球体11の中心に向けて直交する方向から球体11に当接する第1、第2の駆動輪18、19と、第1、第2の駆動輪18、19をそれぞれ回転駆動する第1、第2の回転駆動源20、21とを備えている。更に、駆動機構12は、球体11を挟んで第1、第2の駆動輪18、19とそれぞれ対向して設けられ、回転自由に保持された第1、第2の補助輪(第1、第2の補助受け部材の一例)22、23を備えている。以下、詳細に説明する。
【0028】
球体11は、例えば、球状の芯材と、芯材を被覆して、搬送物の下面に当接する表層部とを有している。ここで、芯材は、例えば、金属で形成され、表層部は、ゴム(例えばウレタン)又は樹脂(例えばポリアセタール)から形成することができる。また、球体11の直径は50〜150mmの範囲であって、例えば76mmmである。ここで、球体11の表層部がゴム又は樹脂から形成されているので、搬送物との間でスリップが生じ難く、球体11の回転力を物体に確実に伝達することができる。なお、搬送物の下面が平坦でない場合は、例えば、搬送物を下面が平坦なパレットを介して球体11に当接させればよい。
【0029】
図1、図3、図5、図6に示すように、第1、第2の駆動輪18、19はそれぞれ、環状で球体11に当接する外周側が凸断面円弧状となってゴム(例えばウレタン)又は樹脂(例えばポリアセタール)から形成されたタイヤ部材24、25と、タイヤ部材24、25の内側に嵌入される軸部と軸部の一方側に連接して設けられ、タイヤ部材24、25の一方の側部に当接して締結部材26(例えばボルト)を介して固定されるつば部を備えた環状のホイール27、28と、ホイール27、28の軸部を貫通し、掛止部材29(例えば平行キー)を介して固定された車軸30、31とを有している。
【0030】
そして、車軸30、31の両側は、基台14上に締結部材の一例であるボルト32を介して固定された取付け台33、34を介して立設された対となる車軸支持部材35、36に軸受け37を介して回転可能に支持されている。ここで、車軸30、31の軸心は、球体11の上下方向中心を通る水平面上にあって、球体11の上下方向中心を通る水平面と球体11の表面とが交わって形成される大円の外側で直交している。このため、第1、第2の駆動輪18、19は、平面視して球体11の大円の中心に向けて直交する方向から球体11の大円に当接している。なお、符号38は、軸受け37を車軸支持部材35、36にそれぞれ取付けている締結部材(例えばボルト)である。
【0031】
第1、第2の回転駆動源20、21は、例えば、エンコーダ付きのパルスモータ39、40を有し、パルスモータ39、40の出力軸41、42が、第1、第2の駆動輪18、19の車軸30、31の一端側とカップリング43を介して接続している。なお、符号44,45はパルスモータ39、40のドライバ、符号46、47はパルスモータ39、40を基台14にそれぞれ取付けるモータ取付け部材、符号48はモータ取付け部材46、47を基台14に取付けるボルト(締結部材の一例)である。なお、エンコーダ付きのパルスモータ39、40の代わりに、エンコーダ付きのサーボモータを使用してもよい。
【0032】
図1、図2、図4、図7、図8に示すように、第1、第2の補助輪22、23は、球体11に当接する金属製の円筒体49、50と、円筒体49、50の中央部を軸心方向に貫通し、円筒体49、50の内周面に軸心方向に並べて取付けられた対となる軸受け51、52を介して設けられた支持軸53、54とを有している。更に、第1、第2の補助輪22、23は、支持軸53、54の一側を固定して支持軸53、54を水平に保持する支持部材55、56と、支持部材55、56を介して円筒体49、50を、球体11を挟んでタイヤ部材24、25とそれぞれ対向させながら球体11の中心に向けて移動する第1、第2のスライド機構57、58とを備えている。
【0033】
第1、第2のスライド機構57、58は、円筒体49、50の支持軸53、54の一方側を保持する支持部材55、56が連結部材59、60を介して取付けられたスライド台車61、62と、基台14上に取付けられてスライド台車61、62の移動方向を定めるレール部材63、64とを有している。これによって、スライド台車61、62の移動に伴って、スライド台車61、62に取付けられた支持部材55、56に保持された支持軸53、54で支持された円筒体49、50を、球体11を挟んでタイヤ部材24、25とそれぞれ対向しながら球体11の中心に向けて進退することができる。
【0034】
更に、スライド台車61、62に取付けられた連結部材59、60の他方側(球体11に対向しない側)には、基台14に取付けられた固定金具65、66が設けられている。そして、連結部材59、60と固定金具65、66の間に圧縮状態でバネ67、68(弾性部材の一例)を配置することで、連結部材59、60を介して、支持部材55、56に保持された円筒体49、50(第1、第2の補助輪22、23)をそれぞれ球体11の中心方向に押圧する付勢手段69、70を構成している。なお、連結部材59、60には、バネ67、68の一端側が嵌入する穴69a、70aが設けられている。
【0035】
ここで、固定金具65、66は、断面視してL字状となって、水平部71が基台14に固定され、垂直部72が立設状態で連結部材59、60に対向している。また、水平部71には、平面視して球体11の中心と円筒体49、50の長手方向(軸心方向)中心とを通過する直線に平行な複数(例えば2つ)の長孔73、74が形成されている。これにより、長孔73、74にボルト75をそれぞれ挿通して基台14に形成された雌ネジ部(図示せず)に締め込むことにより、固定金具65、66を基台14に固定している。なお、雌ネジ部の位置に対して水平部71をスライドさせることにより、基台14上における垂直部72の立設位置を変化させて、平面視した際の球体11の中心と垂直部72との間の距離を調整することができ、球体11に押圧される第1、第2の補助輪22、23の加圧力を調整することができる。
【0036】
更に、球体駆動モジュール10には、図1、図9に示すように、球体11に対して直交方向から当接する第1、第2の補助輪22、23の中央位置(球体11の大円の円周に沿った周方向中央位置)に、球体11の大円に当接する第3の補助輪76が設けられている。ここで、第3の補助輪76は、球体11に当接する金属製の円筒体77と、円筒体77の中央部を軸心方向に貫通し、円筒体77の内周面に軸心方向に並べて取付けられた対となる軸受け(図示せず)を介して設けられた支持軸78とを有している。更に、第3の補助輪76は、支持軸78の一側を固定して支持軸78を水平に保持する支持部材79と、支持部材79を介して円筒体77を球体11の中心に向けて移動する第3のスライド機構80とを備えている。
【0037】
第3のスライド機構80は、円筒体77の支持軸78の一方側を保持する支持部材79が連結部材81を介して取付けられたスライド台車82と、基台14上に取付けられてスライド台車82の移動方向を定めるレール部材83とを有している。これによって、スライド台車82の移動に伴って、スライド台車82に取付けられた支持部材79に保持された支持軸78で支持された円筒体77を、球体11の中心に向けて進退することができる。
【0038】
更に、スライド台車82に取付けられた連結部材81の他方側(球体11に対向しない側)には、基台14に取付けられた固定金具84が設けられている。そして、連結部材81と固定金具84の間に圧縮状態でバネ85(弾性部材の一例)を配置することで、連結部材81を介して、支持部材79に保持された円筒体77(第3の補助輪76)を球体11の中心方向に押圧する付勢手段86を構成している。なお、連結部材81には、バネ85の一端側が嵌入する穴86aが設けられている。
【0039】
ここで、固定金具84は、断面視してL字状となって、水平部87が基台14に固定され、垂直部88が立設状態で連結部材81に対向している。また、水平部87には、平面視して球体11の中心と円筒体77の長手方向(軸心方向)中心とを通過する直線に平行な複数(例えば2つ)の長孔89、90が形成されている。これにより、長孔89、90にボルト91をそれぞれ挿通して基台14に形成された雌ネジ部(図示せず)に締め込むことにより、固定金具84を基台14に固定している。なお、雌ネジ部の位置に対して水平部87をスライドさせることにより、基台14上における垂直部88の立設位置を変化させて、平面視した際の球体11の中心と垂直部88との間の距離を調整することができ、球体11に押圧される第3の補助輪76の加圧力を調整することができる。
【0040】
カバー部材17は、平面視して基台14と同一形状であって、下方に開口し、天井部に開口部16が形成された箱状物である。また、カバー部材17を基台14に取付ける複数(本実施の形態では3つ)の支持部材15は、例えば、基台14上に立設された同一高さの支柱であって、支柱上端部の中央部には、雌ネジ部(図示せず)がそれぞれ形成されている。ここで、支持部材15の高さは、基台14に玉軸受け13を介して保持された球体11の上端の高さより低い。このため、支持部材15の上方から開口側を基台14に向けてカバー部材17を下降すると、カバー部材17の天井部の下面が支持部材15の上端面で支えられ、天井部の開口部16から球体11の上部が露出した状態になる。そして、天井部に形成された貫通孔(図示せず)に締結部材の一例である雄ネジ部材(ビス)92を挿通して雌ネジ部にねじ込むことにより、カバー部材17が支持部材15を介して基台14に取付けられる。
なお、符号93は玉軸受け13を取付ける支持台、符号94は支持台93を基台14に取付ける締結部材の一例であるボルトである。
【0041】
続いて、本発明の一実施の形態に係る球体駆動モジュール10の作用について説明する。球体駆動モジュール10では、平面視して球体11の中心に向けて直交する方向から球体11に当接する第1、第2の駆動輪18、19を有するので、第1、第2の駆動輪18、19を同時に又は交互にそれぞれ回転させることで、球体11を任意の方向に応答性よく回転することができる。ここで、球体11が、第1、第2の駆動輪18、19と第1、第2の補助輪(第1、第2の補助受け部材の一例)22、23により挟まれているので、球体11の中心位置を一定に保って球体11を回転することができ、球体11の回転方向を安定化することができる。また、球体11の少なくとも表層部はゴム又は樹脂からなるため、搬送物との間でスリップが生じ難く、搬送物に駆動力を確実に伝達することができる。その結果、下面が球体11の上端に当接している搬送物を、球体11の上端の回転方向に向けて駆動(押し出す)ことができる。
【0042】
第1、第2の駆動輪18、19は、平面視して球体11(球体11の中心を通る水平面と球体11の表面とが交わって形成される大円)の中心に向けて直交する方向から球体11(大円の円周)に当接し、第1、第2の補助輪22、23は球体11(大円)を挟んで第1、第2の駆動輪18、19とそれぞれ対向しているので、基台14からカバー部材17を取外して球体11を露出させると、この球体11を上方に向けて移動させることができ、球体11を取外すことができ、球体11の交換を容易に行うことができる。
【0043】
第1、第2の駆動輪18、19の球体11に当接する部分が、凸断面円弧状となっているので、球体11の表面に現れる第1、第2の駆動輪18、19の当接部の軌跡が線状となって、球体11を円滑に回転することができる。ここで、第1、第2の駆動輪18、19が球体11に当接する部分が、ゴム又は樹脂からなっているので、球体11と第1、第2の駆動輪18、19との間でスリップが生じ難く、球体11に駆動力を確実に伝達することができる。また、第1、第2の補助輪22、23が球体11に当接する部分が、金属からなるので、第1、第2の補助輪22、23と球体11との間でスリップが生じやすくなって、球体11を円滑に回転することができる。
【0044】
ここで、第1、第2の補助輪22、23が、球体11の中心に向けて第1、第2の補助輪22、23が移動可能な第1、第2のスライド機構57、58をそれぞれ備え、更に、第1、第2の補助輪57、58がバネ87、68によって、球体11の中心方向に押圧されているので、第1、第2の補助輪22、23を球体11に常に当接させることができ、第1、第2の駆動輪18、19との間で球体11を安定して保持することができる。また、第1、第2の補助輪22、23の直径が変化しても球体11に当接させることができ、第1、第2の補助輪22、23の寸法許容範囲を大きく確保できる。
【0045】
そして、球体11に対して直交方向から当接する第1、第2の補助輪22、23の中央位置に、球体11に当接する第3の補助輪76が設けられているので、球体11の中心位置のずれを更に防止して球体11を回転することができる。このため、搬送物の重量が増しても、球体11を任意の方向に安定して回転することができる。ここで、第3の補助輪76が、球体11の中心に向けて第3の補助輪76が移動可能な第3のスライド機構80を有し、更に、第3の補助輪76が、バネ85によって球体11の中心方向に押圧されているので、第3の補助輪76を球体11に常に当接させることができ、第1、第2の駆動輪18、19及び第1、第2の補助輪22、23と連携して球体11を安定して保持することができる。また、第3の補助輪76の直径が変化しても球体11に当接させることができ、第3の補助輪76の寸法許容範囲を大きく確保できる。そして、球体11に当接する部分が金属からなっているので、第3の補助輪76と球体11との間でスリップが生じやすくなって、球体11を円滑に回転することができる。
【0046】
続いて、図10、図11に示すように、球体駆動モジュール10を用いた搬送設備96について説明する。この搬送設備96は、4個(即ち、少なくとも3個以上)の球体駆動モジュール10を用いた第1の実施の形態に係る搬送装置97、98(第1、第2の搬送装置という)と、4個(即ち、少なくとも3個以上)の球体駆動モジュール10aを用いた第2の実施の形態に係る搬送装置99(第3の搬送装置という)を有している。
【0047】
第1の搬送装置97の上流側には、ベルトコンベア、ローラコンベア、又はチェーンコンベアからなる第1の搬送手段100を備え、第1の搬送装置97と第3の搬送装置99の間には第2の搬送手段の一例であるローラコンベア101を、第3の搬送装置99と第2の搬送装置98の間には第3の搬送手段の一例であるローラコンベア102を有し、更に、第2の搬送装置98の下流側には、ベルトコンベア、ローラコンベア又はチェーンコンベアからなる第4の搬送手段103を備えている。
【0048】
なお、第1、第2の搬送装置97、98と第3の搬送装置99に用いている球体駆動モジュール10、10aの主な相違点は、球体駆動モジュール10aにおいては、球体駆動モジュール10に使用した球体11の直径より大きい(例えば、1.2〜1.5倍)球体11aが使用されていること、球体駆動モジュール10aの基台14aが球体駆動モジュール10の基台14より大きくなっていること、球体駆動モジュール10では第1、第2の回転駆動源20、21に減速機がなく、球体駆動モジュール10aでは第1、第2の回転駆動源に減速機が設けられていることである。これによって、第3の搬送装置99の方が第1、第2の搬送装置97、98に比較して、球体11aの細密な回転制御ができることになる。
【0049】
底が平坦な搬送物の一例である平面視して矩形形状の板状物105を、1)第1の搬送手段100によって第1の搬送装置97に搬送し(即ち、Y方向に搬送)、2)第1の搬送装置97で直角方向に方向を変えて、ローラコンベア101から第3の搬送装置99に搬送し(即ち、X方向に搬送)、ここで、第3の搬送装置99を用いてこの板状物105のXY方向の位置合わせ(位置決め)を行い、3)更にローラコンベア102を用いて、第2の搬送装置98に移載して方向転換(即ち、Y方向に搬送)を行い、第4の搬送手段103で払い出すようにしている。
【0050】
以下、これらを用いた、第1〜第3の搬送装置97〜99及びこれに付帯する装置について詳細に説明する。なお、平面視した第1、第2の搬送装置97、98、第3の搬送装置99の中心位置をそれぞれ107〜109とする。
【0051】
第1の搬送装置97は、図10〜図12に示すように、4つの球体駆動モジュール10を、カバー部材17の開口部16から突出する球体11の上端を上方に向けて、平面視した際の中心位置が第1の搬送装置97の中心位置107に一致するように搬送設備96を設置する床面111上に取付け架台112を介して配置された取付けベース106に取付けることにより形成されている。なお、図1に示す符号110は、球体駆動モジュール10の基台14を取付けベース106に固定する締結部材の一例であるボルトである。
【0052】
ここで、取付けベース106は、取付け架台112に配置する際に、床面111に対する高さ位置と、第1の搬送手段100及びローラコンベア101に対する水平位置が調整されて、取付けベース106に取付けられた各球体駆動モジュール10の球体11の上端の高さ位置を、第1の搬送手段100及びローラコンベア101の搬送面、即ち、搬送中の板状物105の底面が移動する面(同一平面の一例)上に合わせると共に、取付けベース106の中心位置を、第1の搬送手段100の搬送方向中心線(第1の搬送手段100の搬送方向に沿って第1の搬送手段100の幅方向(搬送方向に直交する方向)中心を通過する直線)と、ローラコンベア101の搬送方向中心線(ローラコンベア101の搬送方向に沿ってローラコンベア101の幅方向(搬送方向に直交する方向)中心を通過する直線)との交点位置に合わせている。更に、球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31のいずれか一方を、第1の搬送手段100の搬送方向に沿って配置する。したがって、取付けベース106にそれぞれ取付けられた球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31の他方は、ローラコンベア101の搬送方向に沿って(即ち、第1の搬送手段100の搬送方向に直交する方向に)配置される。
【0053】
また、各球体駆動モジュール10は、球体駆動モジュール10の球体11の上端が、取付けベース106の中心から一定距離の円周(ただし、平面視した板状物105より小さな円周)上に等間隔、例えば、取付けベース106の中心から一定距離の円周と取付けベース106の2本の対角線との交点位置(円周を4等分する位置)に合わせてそれぞれ配置することが好ましい。これによって、第1の搬送手段100によって、板状物105が、板状物105の中心が第1の搬送装置97の中心に略一致するように送出されると、板状物105を各球体駆動モジュール10で均等に支えることができる。その結果、第1の搬送装置97により、板状物105を精度よく直角方向に方向を変えて移動させることができ、板状物105をローラコンベア101の搬送方向中心線に沿って押し出すことができる。
【0054】
第2の搬送装置98は、図10〜図12に示すように、4つの球体駆動モジュール10を、カバー部材17の開口部16から突出する球体11の上端を上方に向けて、平面視した際の中心位置が第2の搬送装置98の中心位置108に一致するように搬送設備96を設置する床面111上に取付け架台113を介して配置された取付けベース114に、ボルト110を介して取付けることにより形成されている。
【0055】
ここで、取付けベース114は、取付け架台113に配置する際に、床面111に対する高さ位置と、ローラコンベア102及び第4の搬送手段103に対する水平位置が調整されて、取付けベース114に取付けられた各球体駆動モジュール10の球体11の上端の高さ位置を、ローラコンベア102及び第4の搬送手段103の搬送面、即ち、搬送中の板状物105の底面が移動する面(同一平面の一例)上に合わせると共に、取付けベース114の中心位置を、ローラコンベア102の搬送方向中心線(ローラコンベア102の搬送方向に沿ってローラコンベア102の幅方向中心を通過する直線)と、第4の搬送手段103の搬送方向中心線(第4の搬送手段103の搬送方向に沿って第4の搬送手段103の幅方向中心を通過する直線)との交点位置に合わせている。更に、球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31のいずれか一方を、ローラコンベア102の搬送方向に沿って配置する。したがって、取付けベース114にそれぞれ取付けられた球体駆動モジュール10の第1、第2の駆動輪18、19の車軸30、31の他方は、第4の搬送手段103の搬送方向に沿って(即ち、ローラコンベア102の搬送方向に直交する方向に)配置される。
なお、ローラコンベア102は、ローラコンベア102の搬送方向中心線が、ローラコンベア101の搬送方向中心線と一致するように配置されている。
【0056】
また、各球体駆動モジュール10は、球体駆動モジュール10の球体11の上端が、取付けベース114の中心から一定距離の円周(ただし、平面視した板状物105より小さな円周)上に等間隔、例えば、取付けベース114の中心から一定距離の円周と取付けベース114の2本の対角線との交点位置(円周を4等分する位置)に合わせてそれぞれ配置することが好ましい。これによって、ローラコンベア102によって、板状物105が、板状物105の中心が第2の搬送装置98の中心に略一致するように送出されると、板状物105を各球体駆動モジュール10で均等に支えることができる。その結果、第2の搬送装置98により、板状物105を精度よく直角方向に方向を変えて移動させることができ、板状物105を第4の搬送手段103の搬送方向中心線に沿って押し出すことができる。
【0057】
第3の搬送装置99は、図10、図11、図13に示すように、4つの球体駆動モジュール10aを、カバー部材17の開口部16から突出する球体11aの上端を上方に向けて、平面視した際の中心位置が第3の搬送装置99の中心位置109に一致するように搬送設備96を設置する床面111上に取付け架台115を介して配置された取付けベース116に、ボルト110を介して取付けることにより形成されている。
【0058】
ここで、取付けベース116は、取付け架台115に配置する際に、床面111に対する高さ位置と、ローラコンベア101、102に対する水平位置が調整されて、取付けベース116に取付けられた各球体駆動モジュール10aの球体11aの上端の高さ位置を、ローラコンベア101、102の搬送面、即ち、搬送中の板状物105の底面が移動する面(同一平面の一例)上に合わせると共に、取付けベース116の中心位置を、ローラコンベア101、102の搬送方向中心線上に合わせている。更に、球体駆動モジュール10aの第1、第2の駆動輪18、19の車軸30、31のいずれか一方を、ローラコンベア101、102の搬送方向に沿って(X方向に)配置する。したがって、取付けベース116にそれぞれ取付けられた球体駆動モジュール10aの第1、第2の駆動輪18、19の車軸30、31の他方は、ローラコンベア101、102の搬送方向に直交する方向に沿って(Y方向に)配置される。
【0059】
また、各球体駆動モジュール10aは、球体駆動モジュール10aの球体11aの上端が、取付けベース116の中心から一定距離の円周(ただし、平面視した板状物105より小さな円周)上に等間隔、例えば、取付けベース116の中心から一定距離の円周と取付けベース116の2本の対角線との交点位置(円周を4等分する位置)に合わせてそれぞれ配置することが好ましい。
これによって、ローラコンベア101によって、板状物105が、板状物105の中心が第3の搬送装置99の中心に略一致するように送出されると、板状物105を各球体駆動モジュール10aで均等に支えることができる。
【0060】
ここで、図11,図13に示すように、第3の搬送装置99上の板状物105の複数箇所を、取付けベース116の上方に保持部材117を介して設けた撮像手段118、119(カメラ)で撮影し、得られた画像と予め取得しておいた基準画像(板状物105が第3の搬送装置99上の設定した位置に載置された状態を撮影した画像)と比較することにより、ローラコンベア101から第3の搬送装置99上に送出された板状物105の位置ずれ量を把握することができる。
【0061】
したがって、第3の搬送装置99上での板状物105の位置ずれ量から、X方向のずれ成分Aと、Y方向のずれ成分Bをそれぞれ求めて、各球体駆動モジュール10aの一方の(X方向に沿った)車軸30、31の同期回転操作と、他方の(Y方向に沿った)車軸30、31の同期回転操作を組合わせて、ずれ成分A、Bが消失するように板状物105を移動させることにより、第3の搬送装置99上での板状物105の位置を設定した位置に修正する(位置決めする)ことができる。これにより、第3の搬送装置99上の板状物105に対して種々の処理を行うことができ、板状物105に対する処理が終了すると、板状物105をローラコンベア102の搬送方向中心線に沿って押し出すことができる。
【0062】
以上、本発明を、実施の形態を参照して説明してきたが、本発明は何ら上記した実施の形態に記載した構成に限定されるものではなく、特許請求の範囲に記載されている事項の範囲内で考えられるその他の実施の形態や変形例も含むものである。
例えば、第1、第2の駆動輪が球体に当接する部分を、ゴム又は樹脂から構成したが、金属から構成することも、ゴム、樹脂、及び金属の2以上を組合わせて構成することもできる。
また、4つの球体駆動モジュールを、球体駆動モジュールの球体の上端が、取付けベースの中心から一定距離の円周上に等間隔に配置した搬送装置を構成して、底が平坦な搬送物(板状物)を搬送する場合について説明したが、3つ以上(即ち、3個又は5個以上)の球体駆動モジュールを、搬送物の重心位置が各球体駆動モジュールの球体の上端を結んで形成される多角形の内側にあるように取付けベースに配置して、搬送装置を構成してもよい。
【符号の説明】
【0063】
10、10a:球体駆動モジュール、11、11a:球体、12:駆動機構、13:玉軸受け、14、14a:基台、15:支持部材、16:開口部、17:カバー部材、18:第1の駆動輪、19:第2の駆動輪、20:第1の回転駆動源、21:第2の回転駆動源、22:第1の補助輪、23:第2の補助輪、24、25:タイヤ部材、26:締結部材、27、28:ホイール、29:掛止部材、30、31:車軸、32:ボルト、33、34:取付け台、35、36:車軸支持部材、37:軸受け、38:締結部材、39、40:パルスモータ、41、42:出力軸、43:カップリング、44、45:ドライバ、46、47:モータ取付け部材、48:ボルト、49、50:円筒体、51、52:軸受け、53、54:支持軸、55、56:支持部材、57:第1のスライド機構、58:第2のスライド機構、59、60:連結部材、61、62:スライド台車、63、64:レール部材、65、66:固定金具、67、68:バネ、69:付勢手段、69a:穴、70:付勢手段、70a:穴、71:水平部、72:垂直部、73、74:長孔、75:ボルト、76:第3の補助輪、77:円筒体、78:支持軸、79:支持部材、80:第3のスライド機構、81:連結部材、82:スライド台車、83:レール部材、84:固定金具、85:バネ、86:付勢手段、86a:穴、87:水平部、88:垂直部、89、90:長孔、91:ボルト、92:雄ネジ部材、93:支持台、94:ボルト、96:搬送設備、97:搬送装置(第1の搬送装置)、98:搬送装置(第2の搬送装置)、99:搬送装置(第3の搬送装置)、100:第1の搬送手段、101、102:ローラコンベア、103:第4の搬送手段、105:板状物、106:取付けベース、107、108、109:中心位置、110:ボルト、111:床面、112、113:取付け架台、114:取付けベース、115:取付け架台、116:取付けベース、117:保持部材、118、119:撮像手段
【特許請求の範囲】
【請求項1】
底が平坦な搬送物の下面に当接して回転可能な球体と、該球体を回転駆動する駆動機構と、前記球体を回転可能に保持する球体保持部材と、前記球体保持部材及び前記駆動機構を載置する基台と、複数の支持部材を介して前記基台に取付けられて、前記球体保持部材及び前記駆動機構を覆うと共に、上面に形成された開口部から前記球体の上部を露出させるカバー部材とを有する球体駆動モジュールであって、
前記駆動機構は、平面視して前記球体の中心に向けて直交する方向から該球体に当接する第1、第2の駆動輪と、前記第1、第2の駆動輪をそれぞれ回転駆動する第1、第2の回転駆動源と、前記球体を挟んで前記第1、第2の駆動輪とそれぞれ対向して設けられ、回転自由に保持された第1、第2の補助受け部材とを備え、しかも、前記球体の少なくとも表層部はゴム又は樹脂からなることを特徴とする球体駆動モジュール。
【請求項2】
請求項1記載の球体駆動モジュールにおいて、前記第1、第2の駆動輪が前記球体に当接する部分は、凸断面円弧状となっていることを特徴とする球体駆動モジュール。
【請求項3】
請求項1又は2記載の球体駆動モジュールにおいて、前記第1、第2の駆動輪が前記球体に当接する部分は、ゴム、樹脂、金属、又はこれらの2以上からなっていることを特徴とする球体駆動モジュール。
【請求項4】
請求項1〜3のいずれか1項に記載の球体駆動モジュールにおいて、前記第1、第2の補助受け部材は、第1、第2の補助輪であって、該第1、第2の補助輪が前記球体に当接する部分は、金属からなることを特徴とする球体駆動モジュール。
【請求項5】
請求項4記載の球体駆動モジュールにおいて、前記第1、第2の補助輪は、前記球体の中心に向けて該第1、第2の補助輪が移動可能な第1、第2のスライド機構をそれぞれ備え、更に、前記第1、第2の補助輪はそれぞれ弾性部材によって、前記球体の中心方向に押圧されていることを特徴とする球体駆動モジュール。
【請求項6】
請求項4又は5記載の球体駆動モジュールにおいて、前記球体に対して直交方向から当接する前記第1、第2の補助輪の中央位置に、前記球体に当接する第3の補助輪を設けたことを特徴とする球体駆動モジュール。
【請求項7】
請求項6記載の球体駆動モジュールにおいて、前記第3の補助輪は、前記球体の中心に向けて該第3の補助輪が移動可能な第3のスライド機構を備え、更に、前記第3の補助輪は、弾性部材によって前記球体の中心方向に押圧され、しかも、前記球体に当接する部分は金属からなっていることを特徴とする球体駆動モジュール。
【請求項8】
請求項1〜7のいずれか1項に記載の球体駆動モジュールを、前記カバー部材の前記開口部から突出する前記球体の上端を上方に向け、該球体の上端の高さ位置を同一平面上に合わせて少なくとも3つ、取付けベースに設けたことを特徴とする球体駆動モジュールを用いた搬送装置。
【請求項9】
請求項9記載の球体駆動モジュールを用いた搬送装置において、前記各球体駆動モジュールの前記球体の上端は、平面視して前記取付けベースの中心から一定距離の円周上に等間隔に配置されていることを特徴とする球体駆動モジュールを用いた搬送装置。
【請求項10】
請求項8又は9記載の球体駆動モジュールを用いた搬送装置において、前記第1、第2の回転駆動源には減速機が設けられていることを特徴とする球体駆動モジュールを用いた搬送装置。
【請求項1】
底が平坦な搬送物の下面に当接して回転可能な球体と、該球体を回転駆動する駆動機構と、前記球体を回転可能に保持する球体保持部材と、前記球体保持部材及び前記駆動機構を載置する基台と、複数の支持部材を介して前記基台に取付けられて、前記球体保持部材及び前記駆動機構を覆うと共に、上面に形成された開口部から前記球体の上部を露出させるカバー部材とを有する球体駆動モジュールであって、
前記駆動機構は、平面視して前記球体の中心に向けて直交する方向から該球体に当接する第1、第2の駆動輪と、前記第1、第2の駆動輪をそれぞれ回転駆動する第1、第2の回転駆動源と、前記球体を挟んで前記第1、第2の駆動輪とそれぞれ対向して設けられ、回転自由に保持された第1、第2の補助受け部材とを備え、しかも、前記球体の少なくとも表層部はゴム又は樹脂からなることを特徴とする球体駆動モジュール。
【請求項2】
請求項1記載の球体駆動モジュールにおいて、前記第1、第2の駆動輪が前記球体に当接する部分は、凸断面円弧状となっていることを特徴とする球体駆動モジュール。
【請求項3】
請求項1又は2記載の球体駆動モジュールにおいて、前記第1、第2の駆動輪が前記球体に当接する部分は、ゴム、樹脂、金属、又はこれらの2以上からなっていることを特徴とする球体駆動モジュール。
【請求項4】
請求項1〜3のいずれか1項に記載の球体駆動モジュールにおいて、前記第1、第2の補助受け部材は、第1、第2の補助輪であって、該第1、第2の補助輪が前記球体に当接する部分は、金属からなることを特徴とする球体駆動モジュール。
【請求項5】
請求項4記載の球体駆動モジュールにおいて、前記第1、第2の補助輪は、前記球体の中心に向けて該第1、第2の補助輪が移動可能な第1、第2のスライド機構をそれぞれ備え、更に、前記第1、第2の補助輪はそれぞれ弾性部材によって、前記球体の中心方向に押圧されていることを特徴とする球体駆動モジュール。
【請求項6】
請求項4又は5記載の球体駆動モジュールにおいて、前記球体に対して直交方向から当接する前記第1、第2の補助輪の中央位置に、前記球体に当接する第3の補助輪を設けたことを特徴とする球体駆動モジュール。
【請求項7】
請求項6記載の球体駆動モジュールにおいて、前記第3の補助輪は、前記球体の中心に向けて該第3の補助輪が移動可能な第3のスライド機構を備え、更に、前記第3の補助輪は、弾性部材によって前記球体の中心方向に押圧され、しかも、前記球体に当接する部分は金属からなっていることを特徴とする球体駆動モジュール。
【請求項8】
請求項1〜7のいずれか1項に記載の球体駆動モジュールを、前記カバー部材の前記開口部から突出する前記球体の上端を上方に向け、該球体の上端の高さ位置を同一平面上に合わせて少なくとも3つ、取付けベースに設けたことを特徴とする球体駆動モジュールを用いた搬送装置。
【請求項9】
請求項9記載の球体駆動モジュールを用いた搬送装置において、前記各球体駆動モジュールの前記球体の上端は、平面視して前記取付けベースの中心から一定距離の円周上に等間隔に配置されていることを特徴とする球体駆動モジュールを用いた搬送装置。
【請求項10】
請求項8又は9記載の球体駆動モジュールを用いた搬送装置において、前記第1、第2の回転駆動源には減速機が設けられていることを特徴とする球体駆動モジュールを用いた搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−136302(P2012−136302A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−288261(P2010−288261)
【出願日】平成22年12月24日(2010.12.24)
【出願人】(504174135)国立大学法人九州工業大学 (489)
【出願人】(508090376)リーフ株式会社 (3)
【出願人】(597023189)株式会社タイヨウ (1)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【出願人】(504174135)国立大学法人九州工業大学 (489)
【出願人】(508090376)リーフ株式会社 (3)
【出願人】(597023189)株式会社タイヨウ (1)
【Fターム(参考)】
[ Back to top ]