
球型モータ及びアクチュエータ
【課題】簡易な構成で自由度が大きく、所望の方向への駆動を円滑に行うことができる球型モータを提供すること。
【解決手段】複数の磁石モジュール42が設けられた球体41と、球体41の一部を露出させて覆うとともに、複数のコイルモジュール32が設けられたカバー31と、球体41とカバー31との間に配置され、球体41とカバー31との間隔を所定間隔を維持し、かつ、球体41がその周面に沿って自由に移動できるように設けられた支持機構50と、コイルモジュール32に通電することで、磁石モジュール42とコイルモジュール32による電磁誘導により駆動力を発生させるドライバ63とを備えている。
【解決手段】複数の磁石モジュール42が設けられた球体41と、球体41の一部を露出させて覆うとともに、複数のコイルモジュール32が設けられたカバー31と、球体41とカバー31との間に配置され、球体41とカバー31との間隔を所定間隔を維持し、かつ、球体41がその周面に沿って自由に移動できるように設けられた支持機構50と、コイルモジュール32に通電することで、磁石モジュール42とコイルモジュール32による電磁誘導により駆動力を発生させるドライバ63とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、球形のロータを自在に動作させることができる球型モータ及びアクチュエータに関し、特に自由度が大きいものに関する。
【背景技術】
【0002】
車椅子等を床面上を自由に移動させるためには、複数の車輪をそれぞれモータで駆動していた。この他、車椅子やロボット等を床面上を自由に移動させるための駆動機構として、球体のロータを動作させるものが知られている(例えば特許文献1参照)。
【特許文献1】特開平10−225155号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した駆動機構であると次のような問題があった。すなわち、複数のモータを駆動するものであると、振動や摩擦音、移動の際の滑り誤差が大きくなり、精度の高い駆動を行うことが困難であった。
【0004】
また、上述した球体のロータを動作させる駆動機構では、自由度が2軸方向に限られるため、所望の方向への移動を円滑に行えない場合があった。
【0005】
そこで本発明は、簡易な構成で自由度が大きく、所望の方向への駆動を円滑に行うことができる球型モータ及びアクチュエータを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決し目的を達成するために、本発明の球型モータ及びアクチュエータは次のように構成されている。
【0007】
(1)複数の磁石が設けられた球形のロータと、このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えている。
【0008】
(2)上記(1)に記載された球型モータであって、上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする。
【0009】
(3)上記(1)に記載された球型モータであって、上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする。
【0010】
(4)複数の磁石が設けられた球形のロータと、このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、その一方を上記ロータ、他方を上記ステータに結合することで、上記ロータの移動を規制する弾性部材と、上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えていることを特徴とする。
【0011】
(5)上記(4)に記載されたアクチュエータであって、上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする。
【0012】
(6)上記(4)に記載されたアクチュエータであって、上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする。
【発明の効果】
【0013】
本発明によれば、簡易な構成で自由度が大きく、所望の方向への駆動を円滑に行うことが可能となる。
【発明を実施するための最良の形態】
【0014】
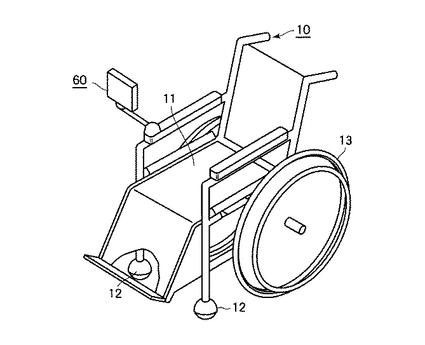
図1は本発明の一実施の形態に係る球型モータ20が組み込まれた電動車椅子10を示す斜視図、図2〜図4は球型モータ20を示す図であって、図2は上面図、図3は縦断面図、図4は下面図である。
【0015】
電動車椅子10は、車椅子本体11と、この車椅子本体11に取り付けられた一対の前輪12と、一対の後輪13とを備えている。一対の前輪12には、それぞれ球型モータ20が組み込まれている。車椅子本体11には、電動車椅子10の動作指令をするための操作部60が取り付けられている。
【0016】
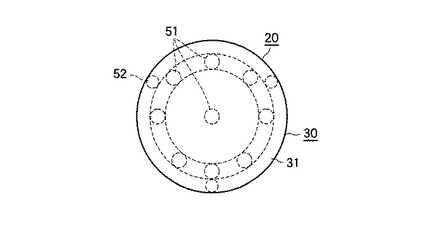
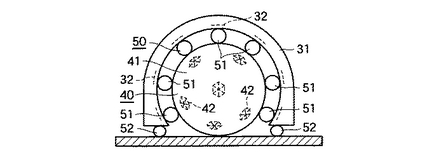
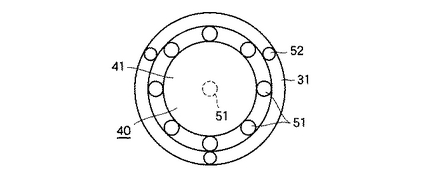
球型モータ20は、図2〜図4に示すように、車椅子本体11に固定されたステータ部30と、このステータ部30に対し所定の自由度で回転駆動されるロータ部40と、ステータ部30に対しロータ部40を円滑に回転させる支持機構50とを備えている。なお、球型モータ20は、操作部60によって駆動される。
【0017】
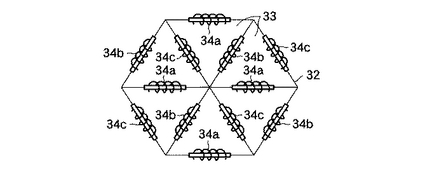
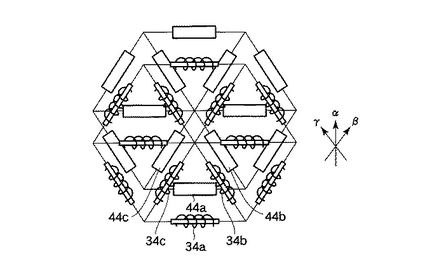
ステータ部30は、半球状のカバー31と、このカバー31内に設けられた複数のコイルモジュール32とを備えている。コイルモジュール32は、図5に示すように、6組のコイル群33から構成されている。各コイル群33は、正三角形の三辺に該当する位置に配置された3つのコイル34a〜34cを接続して形成されたものであって、隣接するコイル群33同士でコイル34a〜34cを共通して使用している。
【0018】
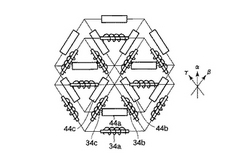
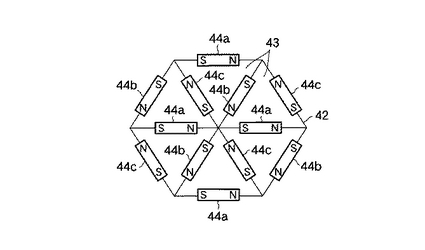
ロータ部40は、樹脂等で成形された球体41と、この球体41内部に配置された複数の磁石モジュール42とを備えている。磁石モジュール42は、図6に示すように、6組の磁石群43から構成されている。各磁石群43は、正三角形の三辺に該当する位置に配置された3つの磁石44a〜44cから構成されたものであって、隣接する磁石群43同士で磁石44a〜44cを共通して使用している。
【0019】
支持機構50は、カバー31の内周面に取り付けられたベアリング機構51と、カバー31の底面に取り付けられ、床面P上を円滑に移動するためのローラ機構52とを備えている。
【0020】
なお、コイルモジュール32と磁石モジュール42とは図7に示すように、対応する位置に配置され、各コイル34a〜34cと各磁石44a〜44cとは、対向配置されている。すなわち、後述するドライバ63を用いてコイル34a〜34cに通電することによって、磁石44a〜44cに対して吸引力及び反発力を発生させることができる。
【0021】
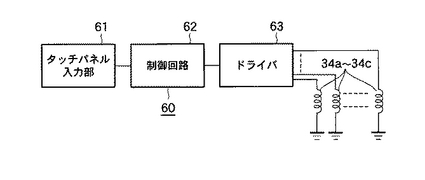
操作部60は、図8に示すように、操作者が入力を行うタッチパネル入力部61と、このタッチパネル入力部61において入力された信号を処理し制御量・回転半径・電流配分を算出する制御回路62と、この制御回路62における制御指令に基づいて上述したコイルモジュール32に電流を印加・停止するドライバ(駆動部)63とを備えている。
【0022】
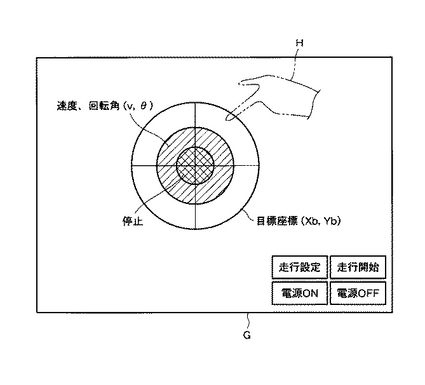
タッチパネル入力部61には、例えば図9に示すような画面が表示され、操作者の指先Hが触れることによって指令信号が入力されるようになっている。具体的には、電源ON/OFF、走行設定指令、走行開始指令、目標座標の位置指令(Xb,Yb)、速度,回転角指令(v,θ)、停止指令の各部分が設定されており、これらの部分に操作者が直接触れることにより、指令信号が出力される。
【0023】
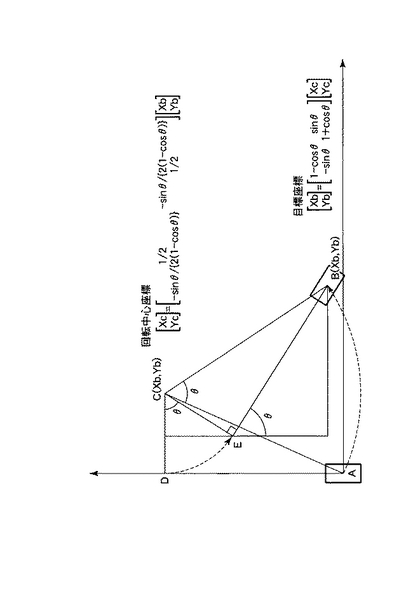
図10は、球型モータ20の全方向移動における幾何学的解析を示す説明図である。所望の方向に移動できることをホロノミックな拘束による全方向移動という。ホロノミックな拘束とは拘束条件が一般化座標と時間を変数に持つ代数方程式で表される。原点A(0,0)から点B(Xb,Yb)に移動する場合の目標点B(Xb,Yb)と回転中心点(Xc,Yc)の関係は以下のようになる。
【0024】
まず、直角三角形ADCを考える。点Cを中心に任意の角度θだけ回転させて、原点Aを原点Bに、点Hを点Mに移動させる。CD=CE=Xc、DA=EB=Ycなので、目標点B(Xb,Yb)と回転中心点C(Xc,Yc)の関係は、以下の式(1),(2)で示される。すなわち、
Xb=Xc−Xc・cosθ+Yc・sinθ …(1)
Yb=Yc−Yc・cosθ−Xc・sinθ …(2)
となり、目標点B(Xb,Yb)を行列式で表すと、以下の式(3)のようになる。すなわち、
【数1】

【0025】
回転中心点C(Xc,Yc)を表すには、式(3)の逆行列を求めることにより得られる。よって、
【数2】
【0026】
となる。
また、移動方向や移動速度については、次のようになる。まず回転角θの単位時間当りの微小変化をΔθ(一定)とする。移動方向については、(3)式にθ=Δθとして代入し、Xb,Ybを求める。これから移動方向は、
【数3】
【0027】
となる。また、Xb=0なら移動方向は上下のみ、Yb=0なら左右のみとなる。
【0028】
移動速度については、x方向、y方向の速度を求めると式(6),(7)となる。
【数4】
【0029】
この2つの値から、
【数5】
【0030】
を求めれば、目標地点への移動速度が求められる。
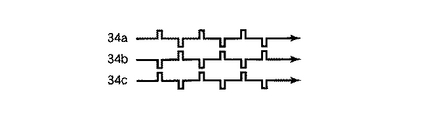
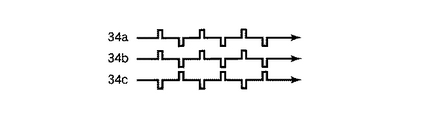
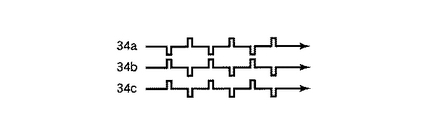
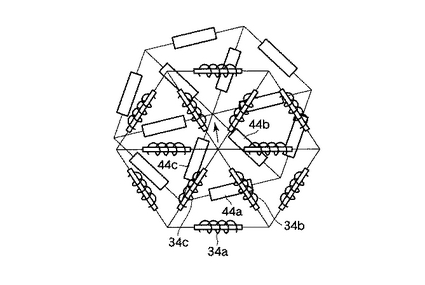
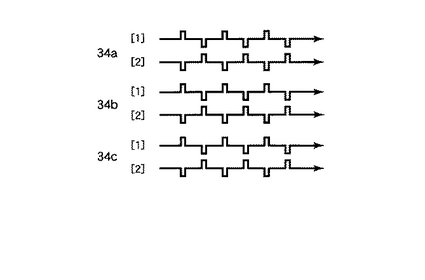
ここで、直進、回転、任意移動する場合における駆動動作について説明する。図11〜図14は、直進の場合の動作説明であって、図11はコイルモジュール32及び磁石モジュール42との位置関係を模式的に示す説明図、図12〜図14はタイミングチャートである。
【0031】
図11中矢印α方向(コイル34aに垂直方向)に進める場合には、コイル34a〜34cに対しては、図12に示すようなタイミングで電流を印加する。
【0032】
図11中矢印β方向(コイル34bに垂直方向)に進める場合には、コイル34a〜34cに対しては、図12に示すようなタイミングで電流を印加する。
【0033】
図11中矢印γ方向(コイル34cに垂直方向)に進める場合には、コイル34a〜34cに対しては、図12に示すようなタイミングで電流を印加する。
【0034】
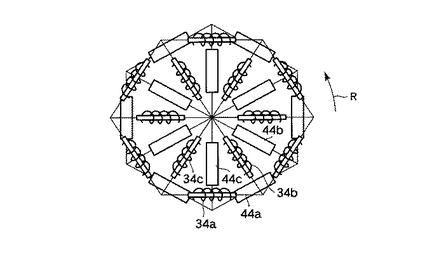
図15及び図16は、その場回転時の動作説明であって、図15はコイルモジュール32及び磁石モジュール42との位置関係を模式的に示す説明図、図16はタイミングチャートである。
【0035】
図15中矢印R方向に回転させる場合には、図16に示すようなタイミングで電流をコイル34a〜34cに印加する。
【0036】
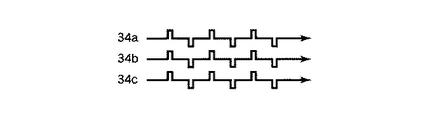
図17及び図18は、任意移動時の動作説明であって、図17はコイルモジュール32及び磁石モジュール42との位置関係を模式的に示す説明図、図18はタイミングチャートである。
【0037】
図17中矢印Q方向に移動させる場合には、図18に示すようなタイミングで電流を印加するが、相隣接するコイル群33には、[1]及び[2]に示すように、異なるタイミングで電流を印加する。
【0038】
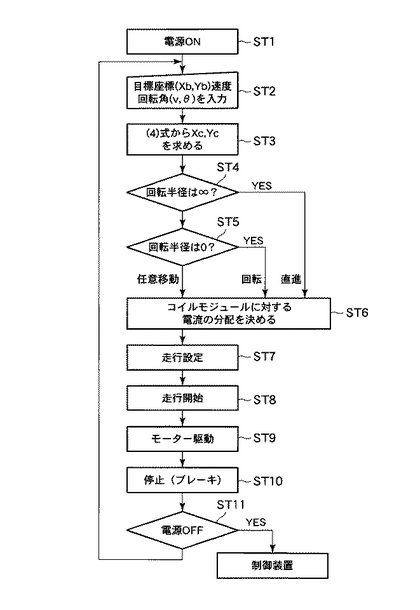
このように構成された電動車椅子10は、次のようにして動作する。すなわち、操作者が車椅子本体11に座り、タッチパネル入力部61の電源をONにする(ST1)。そして、目標座標(Xb,Yb)、速度,回転角指令(v,θ)を入力する(ST2)。前述した式(2)より、Xc,Ycが算出される(ST3)。そして、回転半径が無限大か否かが判別され(ST4)、無限大で無ければST5、無限大であれば、「直進」と判定されST6に進む。続いて、回転半径が0か否かが判別され(ST5)、0でなければ「任意移動」と判定されST6、0であれば「回転」と判定されST6に進む。
【0039】
次に、コイルモジュール32に対する電流の配分を算出する(ST6)。この算出結果に基づいて、走行設定が行われ(ST7)、走行が開始され(ST8)、コイルモジュール32に電流が印加されることで球型モータ20が駆動される(ST9)。電動車椅子10が目的位置に到着又は操作者によるブレーキ動作により停止する(ST10)。電源がOFFであるか否かが判別され(ST11)、OFFで無ければST2に戻って同様の操作が行われる。また、OFFの場合は操作終了となる。
【0040】
上述したように本実施の形態に係る電動車椅子10によれば、三方向に自由度を有する球型モータ20により、任意の方向への移動を簡単な機構で円滑に行うことができる。
【0041】
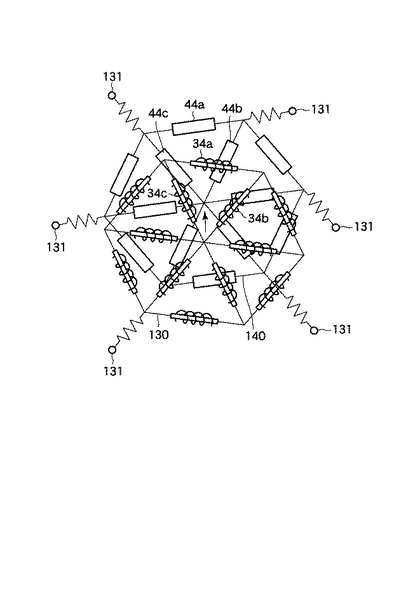
図20は本発明の第2の実施の形態に係るアクチュエータ100の構成を模式的に示す説明図である。なお、図20中、図5,6と同一機能部分には同一符号を付し、その詳細な説明は省略する。
【0042】
アクチュエータ100は、ステータ部130と、このステータ部130に対し所定の自由度で回転駆動されるロータ部140と、ステータ部130を駆動する操作部160を備えている。
【0043】
ステータ部130は、複数のコイルモジュール32を備えている。また、ロータ部140は、磁石モジュール42とを備えている。磁石モジュール42の外周に位置する磁石44a〜44c同士の接続部45には、ステータ部130の固定点131との接続に供される引張バネ46が設けられている。
【0044】
操作部160は、操作者が入力を行うタッチパネル入力部61と、このタッチパネル入力部61において入力された信号を処理し制御量・回転半径・電流配分を算出する制御回路62と、この制御回路62における制御指令に基づいて上述したコイルモジュール132に電流を印加・停止するドライバ(駆動部)63とを備えている。
【0045】
このように構成されたアクチュエータ100は、上述した球型モータ20と同様にしてステータ部130のコイルモジュール32に対してロータ部140の磁石モジュール42が吸引力・反発力を発揮させることで、駆動力を得ることができる。なお、上述したように、引張バネ46を介してステータ部130とロータ部140とは移動量は規制されているため、ロータ部140は所定の範囲内で変位するのみとなる。
【0046】
なお、本発明は前記実施の形態に限定されるものではない。すなわち、上述した実施の形態では、電動車椅子の前輪に用いたが、前輪及び後輪共に球型モータを組み込んでもよい。また、ローラ52は、球型モータ20を1〜2個用いる場合には転倒防止のために必要であるが、3個以上の球型モータ20で支持する場合には、使用しなくても良い。
【0047】
さらに、球型モータ及びアクチュエータは、各種研磨・加工機械、計測機器等の姿勢制御やレーザ加工機等の工業分野、ゲーム機、医療機器分野等の分野に適用可能である。この他、本発明の要旨を逸脱しない範囲で種々変形実施可能であるのは勿論である。
【図面の簡単な説明】
【0048】
【図1】本発明の第1の実施の形態に係る球型モータが組み込まれた電動車椅子を示す斜視図。
【図2】同球型モータを示す上面図。
【図3】同球型モータを示す縦断面図。
【図4】同球型モータを示す下面図。
【図5】同球型モータのステータに組み込まれたコイルモジュールの構成を示す説明図。
【図6】同球型モータのステータに組み込まれた磁石モジュールの構成を示す説明図。
【図7】同球型モータの動作原理を示す説明図。
【図8】同球型モータを操作する操作部の構成を示すブロック図。
【図9】同操作部におけるタッチパネル入力部の画面例を示す説明図。
【図10】同球型モータの移動原理を示す説明図。
【図11】同球型モータにおける直線移動時の動作原理を示す説明図。
【図12】同球型モータにおける直線移動時のコイルモジュールに対する印加電流のタイミングチャートの一例を示す説明図。
【図13】同球型モータにおける直線移動時のコイルモジュールに対する印加電流のタイミングチャートの別の例を示す説明図。
【図14】同球型モータにおける直線移動時のコイルモジュールに対する印加電流のタイミングチャートのさらに別の例を示す説明図。
【図15】同球型モータにおける回転時の動作原理を示す説明図。
【図16】同球型モータにおける回転時のコイルモジュールに対する印加電流のタイミングチャートの一例を示す説明図。
【図17】同球型モータにおける任意移動時の動作原理を示す説明図。
【図18】同球型モータにおける任意移動時のコイルモジュールに対する印加電流のタイミングチャートの一例を示す説明図。
【図19】同球型モータにおける処理手順を示すフローチャートを示す説明図。
【図20】本発明の第2の実施の形態に係るアクチュエータの構成を示す説明図。
【符号の説明】
【0049】
10…電動車椅子、20…球型モータ、30,130…ステータ部、32…コイルモジュール、34a〜34c…コイル、40,140…ロータ部、41…球体、42…磁石モジュール、44a〜44c…磁石、50…支持機構、60…操作部、61…タッチパネル入力部、62…制御回路、63…ドライバ(駆動部)、100…アクチュエータ。
【技術分野】
【0001】
本発明は、球形のロータを自在に動作させることができる球型モータ及びアクチュエータに関し、特に自由度が大きいものに関する。
【背景技術】
【0002】
車椅子等を床面上を自由に移動させるためには、複数の車輪をそれぞれモータで駆動していた。この他、車椅子やロボット等を床面上を自由に移動させるための駆動機構として、球体のロータを動作させるものが知られている(例えば特許文献1参照)。
【特許文献1】特開平10−225155号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した駆動機構であると次のような問題があった。すなわち、複数のモータを駆動するものであると、振動や摩擦音、移動の際の滑り誤差が大きくなり、精度の高い駆動を行うことが困難であった。
【0004】
また、上述した球体のロータを動作させる駆動機構では、自由度が2軸方向に限られるため、所望の方向への移動を円滑に行えない場合があった。
【0005】
そこで本発明は、簡易な構成で自由度が大きく、所望の方向への駆動を円滑に行うことができる球型モータ及びアクチュエータを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決し目的を達成するために、本発明の球型モータ及びアクチュエータは次のように構成されている。
【0007】
(1)複数の磁石が設けられた球形のロータと、このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えている。
【0008】
(2)上記(1)に記載された球型モータであって、上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする。
【0009】
(3)上記(1)に記載された球型モータであって、上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする。
【0010】
(4)複数の磁石が設けられた球形のロータと、このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、その一方を上記ロータ、他方を上記ステータに結合することで、上記ロータの移動を規制する弾性部材と、上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えていることを特徴とする。
【0011】
(5)上記(4)に記載されたアクチュエータであって、上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする。
【0012】
(6)上記(4)に記載されたアクチュエータであって、上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする。
【発明の効果】
【0013】
本発明によれば、簡易な構成で自由度が大きく、所望の方向への駆動を円滑に行うことが可能となる。
【発明を実施するための最良の形態】
【0014】
図1は本発明の一実施の形態に係る球型モータ20が組み込まれた電動車椅子10を示す斜視図、図2〜図4は球型モータ20を示す図であって、図2は上面図、図3は縦断面図、図4は下面図である。
【0015】
電動車椅子10は、車椅子本体11と、この車椅子本体11に取り付けられた一対の前輪12と、一対の後輪13とを備えている。一対の前輪12には、それぞれ球型モータ20が組み込まれている。車椅子本体11には、電動車椅子10の動作指令をするための操作部60が取り付けられている。
【0016】
球型モータ20は、図2〜図4に示すように、車椅子本体11に固定されたステータ部30と、このステータ部30に対し所定の自由度で回転駆動されるロータ部40と、ステータ部30に対しロータ部40を円滑に回転させる支持機構50とを備えている。なお、球型モータ20は、操作部60によって駆動される。
【0017】
ステータ部30は、半球状のカバー31と、このカバー31内に設けられた複数のコイルモジュール32とを備えている。コイルモジュール32は、図5に示すように、6組のコイル群33から構成されている。各コイル群33は、正三角形の三辺に該当する位置に配置された3つのコイル34a〜34cを接続して形成されたものであって、隣接するコイル群33同士でコイル34a〜34cを共通して使用している。
【0018】
ロータ部40は、樹脂等で成形された球体41と、この球体41内部に配置された複数の磁石モジュール42とを備えている。磁石モジュール42は、図6に示すように、6組の磁石群43から構成されている。各磁石群43は、正三角形の三辺に該当する位置に配置された3つの磁石44a〜44cから構成されたものであって、隣接する磁石群43同士で磁石44a〜44cを共通して使用している。
【0019】
支持機構50は、カバー31の内周面に取り付けられたベアリング機構51と、カバー31の底面に取り付けられ、床面P上を円滑に移動するためのローラ機構52とを備えている。
【0020】
なお、コイルモジュール32と磁石モジュール42とは図7に示すように、対応する位置に配置され、各コイル34a〜34cと各磁石44a〜44cとは、対向配置されている。すなわち、後述するドライバ63を用いてコイル34a〜34cに通電することによって、磁石44a〜44cに対して吸引力及び反発力を発生させることができる。
【0021】
操作部60は、図8に示すように、操作者が入力を行うタッチパネル入力部61と、このタッチパネル入力部61において入力された信号を処理し制御量・回転半径・電流配分を算出する制御回路62と、この制御回路62における制御指令に基づいて上述したコイルモジュール32に電流を印加・停止するドライバ(駆動部)63とを備えている。
【0022】
タッチパネル入力部61には、例えば図9に示すような画面が表示され、操作者の指先Hが触れることによって指令信号が入力されるようになっている。具体的には、電源ON/OFF、走行設定指令、走行開始指令、目標座標の位置指令(Xb,Yb)、速度,回転角指令(v,θ)、停止指令の各部分が設定されており、これらの部分に操作者が直接触れることにより、指令信号が出力される。
【0023】
図10は、球型モータ20の全方向移動における幾何学的解析を示す説明図である。所望の方向に移動できることをホロノミックな拘束による全方向移動という。ホロノミックな拘束とは拘束条件が一般化座標と時間を変数に持つ代数方程式で表される。原点A(0,0)から点B(Xb,Yb)に移動する場合の目標点B(Xb,Yb)と回転中心点(Xc,Yc)の関係は以下のようになる。
【0024】
まず、直角三角形ADCを考える。点Cを中心に任意の角度θだけ回転させて、原点Aを原点Bに、点Hを点Mに移動させる。CD=CE=Xc、DA=EB=Ycなので、目標点B(Xb,Yb)と回転中心点C(Xc,Yc)の関係は、以下の式(1),(2)で示される。すなわち、
Xb=Xc−Xc・cosθ+Yc・sinθ …(1)
Yb=Yc−Yc・cosθ−Xc・sinθ …(2)
となり、目標点B(Xb,Yb)を行列式で表すと、以下の式(3)のようになる。すなわち、
【数1】
【0025】
回転中心点C(Xc,Yc)を表すには、式(3)の逆行列を求めることにより得られる。よって、
【数2】
【0026】
となる。
また、移動方向や移動速度については、次のようになる。まず回転角θの単位時間当りの微小変化をΔθ(一定)とする。移動方向については、(3)式にθ=Δθとして代入し、Xb,Ybを求める。これから移動方向は、
【数3】
【0027】
となる。また、Xb=0なら移動方向は上下のみ、Yb=0なら左右のみとなる。
【0028】
移動速度については、x方向、y方向の速度を求めると式(6),(7)となる。
【数4】
【0029】
この2つの値から、
【数5】
【0030】
を求めれば、目標地点への移動速度が求められる。
ここで、直進、回転、任意移動する場合における駆動動作について説明する。図11〜図14は、直進の場合の動作説明であって、図11はコイルモジュール32及び磁石モジュール42との位置関係を模式的に示す説明図、図12〜図14はタイミングチャートである。
【0031】
図11中矢印α方向(コイル34aに垂直方向)に進める場合には、コイル34a〜34cに対しては、図12に示すようなタイミングで電流を印加する。
【0032】
図11中矢印β方向(コイル34bに垂直方向)に進める場合には、コイル34a〜34cに対しては、図12に示すようなタイミングで電流を印加する。
【0033】
図11中矢印γ方向(コイル34cに垂直方向)に進める場合には、コイル34a〜34cに対しては、図12に示すようなタイミングで電流を印加する。
【0034】
図15及び図16は、その場回転時の動作説明であって、図15はコイルモジュール32及び磁石モジュール42との位置関係を模式的に示す説明図、図16はタイミングチャートである。
【0035】
図15中矢印R方向に回転させる場合には、図16に示すようなタイミングで電流をコイル34a〜34cに印加する。
【0036】
図17及び図18は、任意移動時の動作説明であって、図17はコイルモジュール32及び磁石モジュール42との位置関係を模式的に示す説明図、図18はタイミングチャートである。
【0037】
図17中矢印Q方向に移動させる場合には、図18に示すようなタイミングで電流を印加するが、相隣接するコイル群33には、[1]及び[2]に示すように、異なるタイミングで電流を印加する。
【0038】
このように構成された電動車椅子10は、次のようにして動作する。すなわち、操作者が車椅子本体11に座り、タッチパネル入力部61の電源をONにする(ST1)。そして、目標座標(Xb,Yb)、速度,回転角指令(v,θ)を入力する(ST2)。前述した式(2)より、Xc,Ycが算出される(ST3)。そして、回転半径が無限大か否かが判別され(ST4)、無限大で無ければST5、無限大であれば、「直進」と判定されST6に進む。続いて、回転半径が0か否かが判別され(ST5)、0でなければ「任意移動」と判定されST6、0であれば「回転」と判定されST6に進む。
【0039】
次に、コイルモジュール32に対する電流の配分を算出する(ST6)。この算出結果に基づいて、走行設定が行われ(ST7)、走行が開始され(ST8)、コイルモジュール32に電流が印加されることで球型モータ20が駆動される(ST9)。電動車椅子10が目的位置に到着又は操作者によるブレーキ動作により停止する(ST10)。電源がOFFであるか否かが判別され(ST11)、OFFで無ければST2に戻って同様の操作が行われる。また、OFFの場合は操作終了となる。
【0040】
上述したように本実施の形態に係る電動車椅子10によれば、三方向に自由度を有する球型モータ20により、任意の方向への移動を簡単な機構で円滑に行うことができる。
【0041】
図20は本発明の第2の実施の形態に係るアクチュエータ100の構成を模式的に示す説明図である。なお、図20中、図5,6と同一機能部分には同一符号を付し、その詳細な説明は省略する。
【0042】
アクチュエータ100は、ステータ部130と、このステータ部130に対し所定の自由度で回転駆動されるロータ部140と、ステータ部130を駆動する操作部160を備えている。
【0043】
ステータ部130は、複数のコイルモジュール32を備えている。また、ロータ部140は、磁石モジュール42とを備えている。磁石モジュール42の外周に位置する磁石44a〜44c同士の接続部45には、ステータ部130の固定点131との接続に供される引張バネ46が設けられている。
【0044】
操作部160は、操作者が入力を行うタッチパネル入力部61と、このタッチパネル入力部61において入力された信号を処理し制御量・回転半径・電流配分を算出する制御回路62と、この制御回路62における制御指令に基づいて上述したコイルモジュール132に電流を印加・停止するドライバ(駆動部)63とを備えている。
【0045】
このように構成されたアクチュエータ100は、上述した球型モータ20と同様にしてステータ部130のコイルモジュール32に対してロータ部140の磁石モジュール42が吸引力・反発力を発揮させることで、駆動力を得ることができる。なお、上述したように、引張バネ46を介してステータ部130とロータ部140とは移動量は規制されているため、ロータ部140は所定の範囲内で変位するのみとなる。
【0046】
なお、本発明は前記実施の形態に限定されるものではない。すなわち、上述した実施の形態では、電動車椅子の前輪に用いたが、前輪及び後輪共に球型モータを組み込んでもよい。また、ローラ52は、球型モータ20を1〜2個用いる場合には転倒防止のために必要であるが、3個以上の球型モータ20で支持する場合には、使用しなくても良い。
【0047】
さらに、球型モータ及びアクチュエータは、各種研磨・加工機械、計測機器等の姿勢制御やレーザ加工機等の工業分野、ゲーム機、医療機器分野等の分野に適用可能である。この他、本発明の要旨を逸脱しない範囲で種々変形実施可能であるのは勿論である。
【図面の簡単な説明】
【0048】
【図1】本発明の第1の実施の形態に係る球型モータが組み込まれた電動車椅子を示す斜視図。
【図2】同球型モータを示す上面図。
【図3】同球型モータを示す縦断面図。
【図4】同球型モータを示す下面図。
【図5】同球型モータのステータに組み込まれたコイルモジュールの構成を示す説明図。
【図6】同球型モータのステータに組み込まれた磁石モジュールの構成を示す説明図。
【図7】同球型モータの動作原理を示す説明図。
【図8】同球型モータを操作する操作部の構成を示すブロック図。
【図9】同操作部におけるタッチパネル入力部の画面例を示す説明図。
【図10】同球型モータの移動原理を示す説明図。
【図11】同球型モータにおける直線移動時の動作原理を示す説明図。
【図12】同球型モータにおける直線移動時のコイルモジュールに対する印加電流のタイミングチャートの一例を示す説明図。
【図13】同球型モータにおける直線移動時のコイルモジュールに対する印加電流のタイミングチャートの別の例を示す説明図。
【図14】同球型モータにおける直線移動時のコイルモジュールに対する印加電流のタイミングチャートのさらに別の例を示す説明図。
【図15】同球型モータにおける回転時の動作原理を示す説明図。
【図16】同球型モータにおける回転時のコイルモジュールに対する印加電流のタイミングチャートの一例を示す説明図。
【図17】同球型モータにおける任意移動時の動作原理を示す説明図。
【図18】同球型モータにおける任意移動時のコイルモジュールに対する印加電流のタイミングチャートの一例を示す説明図。
【図19】同球型モータにおける処理手順を示すフローチャートを示す説明図。
【図20】本発明の第2の実施の形態に係るアクチュエータの構成を示す説明図。
【符号の説明】
【0049】
10…電動車椅子、20…球型モータ、30,130…ステータ部、32…コイルモジュール、34a〜34c…コイル、40,140…ロータ部、41…球体、42…磁石モジュール、44a〜44c…磁石、50…支持機構、60…操作部、61…タッチパネル入力部、62…制御回路、63…ドライバ(駆動部)、100…アクチュエータ。
【特許請求の範囲】
【請求項1】
複数の磁石が設けられた球形のロータと、
このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、
上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、
上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えていることを特徴とする球型モータ。
【請求項2】
上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする請求項1に記載の球型モータ。
【請求項3】
上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする請求項1に記載の球型モータ。
【請求項4】
複数の磁石が設けられた球形のロータと、
このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、
上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、
その一方を上記ロータ、他方を上記ステータに結合することで、上記ロータの移動を規制する弾性部材と、
上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えていることを特徴とするアクチュエータ。
【請求項5】
上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする請求項4に記載のアクチュエータ。
【請求項6】
上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする請求項4に記載のアクチュエータ。
【請求項1】
複数の磁石が設けられた球形のロータと、
このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、
上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、
上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えていることを特徴とする球型モータ。
【請求項2】
上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする請求項1に記載の球型モータ。
【請求項3】
上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする請求項1に記載の球型モータ。
【請求項4】
複数の磁石が設けられた球形のロータと、
このロータの一部を露出させて覆うとともに、コイルが設けられた上記ステータと、
上記ロータと上記ステータとの間に配置され、上記ロータと上記ステータとの間隔を所定間隔を維持し、かつ、上記ロータがその周面に沿って自由に移動できるように設けられた支持機構と、
その一方を上記ロータ、他方を上記ステータに結合することで、上記ロータの移動を規制する弾性部材と、
上記コイルに通電することで、上記磁石と上記コイルによる電磁誘導により駆動力を発生させる駆動部とを備えていることを特徴とするアクチュエータ。
【請求項5】
上記複数の磁石は、三角形の三辺にあたる位置に配置された3つの磁石からなる磁石群が、少なくとも複数配置されていることを特徴とする請求項4に記載のアクチュエータ。
【請求項6】
上記複数のコイルは、三角形の三辺にあたる位置に配置された3つのコイルからなるコイル群が、少なくとも複数配置されていることを特徴とする請求項4に記載のアクチュエータ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2006−33978(P2006−33978A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−207814(P2004−207814)
【出願日】平成16年7月14日(2004.7.14)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月14日(2004.7.14)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【Fターム(参考)】
[ Back to top ]