
球形飛行機及びテールシッター機
【課題】狭所からの垂直離陸後に翼で飛行し、ホバリングも可能であり、着陸後に地上移動可能であり、再離陸できる柔軟・有用な使用用途の飛行機を提供する。
【解決手段】球形飛行機12は、プロペラ1の後流38内において、全体の重心10よりも前方にエレベータ3及びラダー4が設けられ、垂直離着陸及び通常巡行飛行が可能とされたテールシッター機32と、これを囲んで機体と一体に設けられ、少なくともプロペラの直径に相当する面積を有する飛行方向についての前部及び後部が開放された球殻体8とを有している。
【解決手段】球形飛行機12は、プロペラ1の後流38内において、全体の重心10よりも前方にエレベータ3及びラダー4が設けられ、垂直離着陸及び通常巡行飛行が可能とされたテールシッター機32と、これを囲んで機体と一体に設けられ、少なくともプロペラの直径に相当する面積を有する飛行方向についての前部及び後部が開放された球殻体8とを有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として垂直離着陸及び通常巡航飛行が可能な航空機に係り、特に進出先での着陸、地上移動及び再離陸が容易な球形飛行機と、進出先での離着陸を容易とするために空中と接地中の両方において同様の制御方式で機体姿勢を制御することができるテールシッター機(テールシッター型VTOL機)に関する。
【背景技術】
【0002】
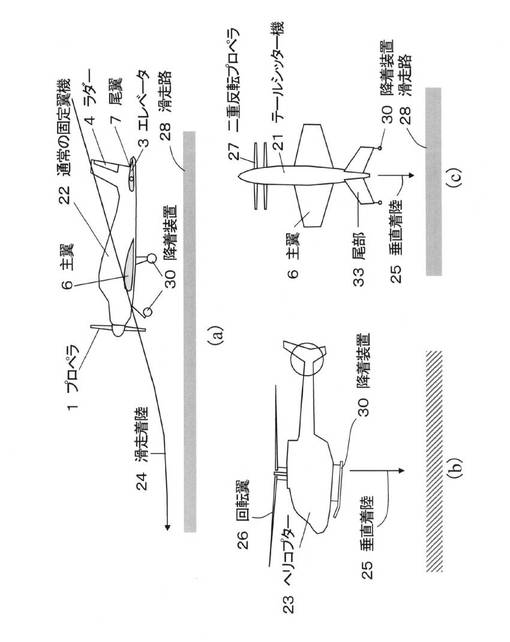
図9に示すように、従来の各種航空機には、同図(a)に示す通常の固定翼機22の他、同図(b)に示すヘリコプター23や、同図(c)に示すテールシッター型VTOL機21のように、垂直離着陸が可能な航空機(VTOL機)がある。
【0003】
垂直離着陸が可能な航空機(VTOL機)は、離着陸の際に地表面近くに大きな空間と広い滑走面を必要としないため、市街地、不整地、森林及び山岳等での離着陸も場合によっては可能であり、柔軟な運用が可能であることを特長とする。また、VTOL機は必然的に空中で速度を0、つまりホバリングができるため、地上からは接近できない現場の詳細な情報収集に有用である。さらに、進出先に垂直着陸に必要な地形があれば、エネルギー効率の悪いホバリングを行わなくとも、着陸して定常的な情報収集及び待機時間の延伸が可能である。
【0004】
しかし、図9(b)に示したヘリコプター23等の典型的なVTOL機は、固定翼機22のように翼を利用した効率の良い高速巡航飛行ができず、速度、進出距離、滞空時間等の性能面においては優れているとは言えない。また、離着陸の際には非線形的な複雑な操作を必要とするうえ、不整地において自力での地上移動はほぼ不可能であり、着陸地点の地形と姿勢によっては再離陸ができない場合がある。
【0005】
そこで、VTOL機の巡航時の性能を向上させる一つの方法としてテールシッター方式がある。図9(c)に示すテールシッター型VTOL機21は、通常の固定翼機22と同様に、巡航中は固定翼である主翼6を用いた高効率の高速飛行を行うが、離着陸時には機体を垂直に立てて推力方向を上向きにし、機体重量とほぼ同じ推力を用いて機体を浮遊させ、尾部33を下にしたまま離着陸を行う。そのため、テールシッター型VTOL機21は複雑で重量増加となるティルト機構等を必要とせず、比較的簡素な機体構成でありながら通常巡航飛行及び定点での離着陸の能力も兼ね備えているという特長を持っている。
【0006】
下記特許文献1及び2には、この種のテールシッター型VTOL機についての発明が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−213397号公報
【特許文献2】米国特許第5289994号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
一方で、従来のテールシッター型VTOL機21は推力重量比が1以上である推進装置を搭載しなければならない、速度Oにおいて姿勢制御が可能となるように工夫する必要がある、巡航飛行〜ホバリング間の遷移飛行の空力制御が難しい、風が強い状況においても機体を垂直に立てた状態で着地させる必要がある、接地前後の姿勢制御が非常に困難、地上での自力移動は不可能といった多くの短所がある。
【0009】
障害物との接触については、通常、図9(c)に示すテールシッター型VTOL機21は降着装置30以外の部分が他の物と接触することは想定されていないため、障害物との接触の可能性が非常に高い災害現場、屋内及び森林等の環境では、航空機を飛行させることは危険である。また、進出先で着陸時に機体が倒れてしまった場合は、機体が破損するだけでなく、そこから再離陸することは不可能である。
【0010】
したがって、現時点では「狭い場所からの垂直離陸→翼を用いた高速巡航飛行で進出→目的地上空にて情報収集のため滞空またはホバリング→長時間の情報収集のため目的地周辺に着地→さらに詳細情報を取得するため地上移動で接近→障害物を乗り越える→任務達成後に再離陸→高速巡航飛行にて帰投→風により垂直着陸が難しい場合は滑走着陸」といった非常に柔軟で有用な使用用途を実現できる航空機は存在しない。
【0011】
本発明はこうした実状に鑑みてなされたものであり、上記の用途の少なくとも一部を実現できる飛行機を提案することを目的としている。
より具体的には、まず後述する新規なテールシッター機には限定しないが、垂直着陸又は滑走着陸が可能な飛行機を球殻内に取り付けることにより上記の用途の少なくとも一部を実現できる球形飛行機を提案することを基本の目的としている。次に、垂直離着陸及び高速巡航飛行が可能で機体構成が簡素であり、制御も容易な新規なテールシッター機を実現することを第1の目的としている。そして、この新規なテールシッター機を球殻内に取り付けることにより上記の用途を実現できる球形飛行機を提案することを第2の目的としている。
【課題を解決するための手段】
【0012】
基本の目的に係る請求項1に記載された基本発明の球形飛行機は、
プロペラ推進装置の後流内に3舵を配した垂直着陸又は滑走着陸が可能な飛行機と、
前記飛行機を囲んで前記飛行機と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴としている。
【0013】
第1の目的に係る請求項2に記載された第1発明のテールシッター機は、
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵とを有し、垂直離着陸及び通常巡行飛行が可能なテールシッター機において、
重心よりも前方にエレベータ及びラダーが設けられたことを特徴としている。
【0014】
第2の目的に係る請求項3に記載された第2発明の球形飛行機は、
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵のうち、全体の重心よりも前方にエレベータ及びラダーが設けられ、垂直離着陸及び通常巡行飛行が可能とされたテールシッター型VTOL機と、
前記テールシッター型VTOL機を囲んで前記機体と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴としている。
【0015】
請求項4に記載された球形飛行機は、請求項3記載の球形飛行機において、
全体の重心よりも前方において前記機体と前記球殻体を連結する4枚の先尾翼が90°間隔で設けられ、前記エレベータ及び前記ラダーは互いに90°間隔で2枚ずつの前記先尾翼に設けられ、
全体の重心よりも後方において前記機体と前記球殻体を連結する4枚の主翼が前記尾翼の間の位置となるように90°間隔で設けられ、前記エルロンは該主翼に設けられたことを特徴としている。
【0016】
請求項5に記載された球形飛行機は、請求項4記載の球形飛行機において、
地上回転移動、垂直離陸、ホバリング、通常巡航飛行を含む運航態様群から選択される任意の運航態様に適した重心位置を得るために、前記機体に搭載された重量物を前記機体内で移動させるための重心移動制御手段を有することを特徴としている。
【0017】
請求項6に記載された球形飛行機は、請求項4記載の球形飛行機において、
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、プロペラ推進装置におけるプロペラピッチ角を逆ピッチにし又はプロペラ回転方向を逆にすることにより、推力の方向を反転させられるように構成したことを特徴としている。
【0018】
請求項7に記載された球形飛行機は、請求項4記載の球形飛行機において、
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、前記主翼の前記エルロンを動作させて回転モーメントを発生するように構成したことを特徴としている。
【0019】
請求項8に記載された球形飛行機は、請求項4記載の球形飛行機において、
通常巡航飛行中に飛行効率と安定性を向上させるために、前記球殻体の一部を展開翼として展開できることを特徴としている。
【0020】
請求項9に記載された球形飛行機は、請求項1、3乃至8のいずれか1つに記載の球形飛行機において、
遠隔操縦、自律行動が可能な無人機であることを特徴としている。
【発明の効果】
【0021】
基本発明の球形飛行機によれば、外形が球であるため着陸時に破損が生じにくく、従来機では着陸できないような不整地にも着陸が可能となる。また、垂直着陸機の場合であっても天候や地上の条件に応じて滑走着陸が可能となる。また、その場合には、沈降率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら着陸できるので、困難な垂直着陸を行なわなくとも安定した着陸が行なえるので、帰投が確実になる。また、機体を球殻で覆っているため、地面との接触以外にも強くなり、例えば建物の壁や天井等との接触にも強い。
【0022】
第1発明のテールシッター機によれば、水平飛行中に縦と方向に関する安定が得られる重心位置及び舵面配置でありながら、空中での引き起こし操舵と同じ操作によって、接地中でも同じ方向に機首を動かすことが可能となる。このことは副次的に、接地中の機体の重心位置が地面に近くなり安定度が増すことと、尾翼と比較して大きくかつ強い構造である主翼を接地箇所にすることができるというテールシッター機にとってのメリットに貢献することとなる。
【0023】
第2発明の球形飛行機によれば、外形が球であるため着陸時に破損が生じにくく、従来機では着陸できないような不整地にも着陸が可能となる。また、垂直着陸機が可能であるとともに、天候や地上の条件に応じて滑走着陸も可能となる。また、その場合には、沈降率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら着陸できるので、条件によっては困難となる垂直着陸を行なわなくとも安定した着陸が行なえるので、帰投が確実になる。また、機体を球殻で覆っているため、地面との接触以外にも強くなり、例えば建物の壁や天井等との接触にも強い。
【0024】
さらに、その構成として取り込んだ第1発明のテールシッター機の姿勢制御を利用し、地上においてもプロペラ後流と舵面が発生するコントロールモーメントにより、機体を移動させたい方向に姿勢を傾け続けることで、機体全体の回転移動が可能となる。
【0025】
これにより、地上を移動するたびに飛び上がらなくて済むため、エネルギーを温存できかつ安全である。回転移動では乗り越えることが困難な大きな段差や急斜面に直面した場合のみ、一時的に離陸し飛び越えることとなる。
【図面の簡単な説明】
【0026】
【図1】(a)は第1発明のベースとして本発明者が想定したテールシッター機の地上での姿勢制御を示す図、(b)は第1発明のテールシッター機の地上での姿勢制御を示す図である。
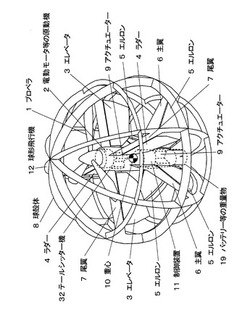
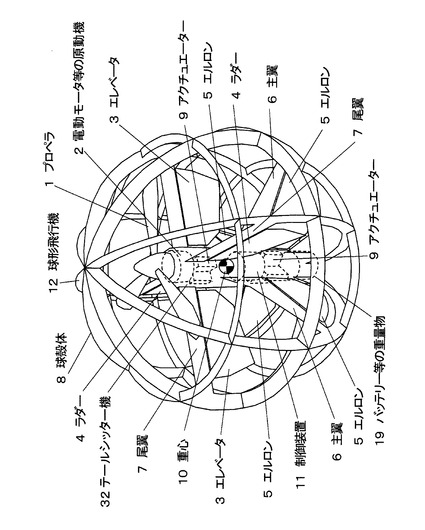
【図2】図2は基本発明乃至第2発明の実施形態である球形飛行機の構成を示す図である。
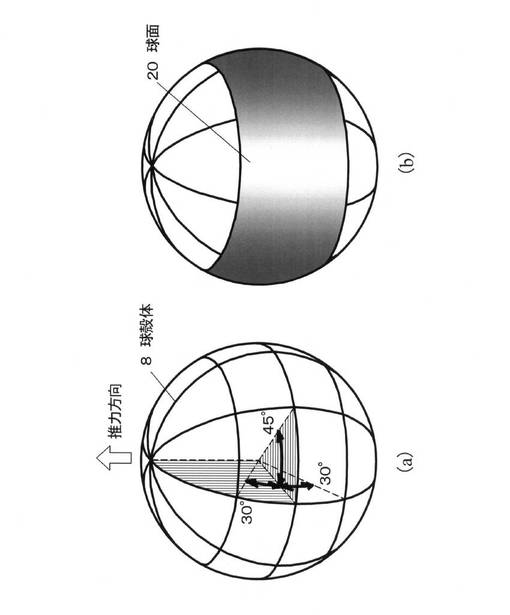
【図3】図3は基本発明乃至第2発明の実施形態である球形飛行機の外形を示す図である。
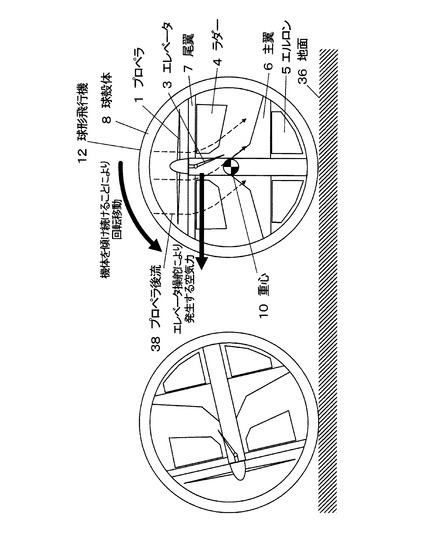
【図4】図4は基本発明乃至第2発明の実施形態である球形飛行機の回転方法を示す図である。
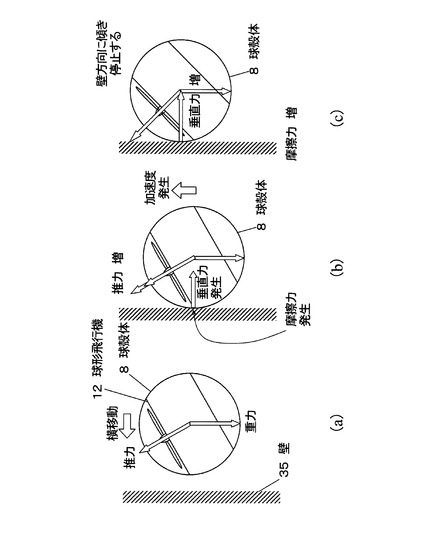
【図5】図5は基本発明乃至第2発明の実施形態である球形飛行機が壁に接触した際の挙動を示す図である。
【図6】図6は基本発明乃至第2発明の実施形態である球形飛行機の変形例を示す図である。
【図7】図7は基本発明乃至第2発明の変形例の球形飛行機が、推力反転により、逆さまの状態から脱出する方法を示す図である。
【図8】図8は基本発明乃至第2発明の変形例の球形飛行機が、統合舵面により、逆さまの状態から脱出する方法を示す図である。
【図9】図9は従来の各種航空機及びその着陸方式を示す図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態を図1〜図9を参照して説明する。
1.第1発明とその実施形態について
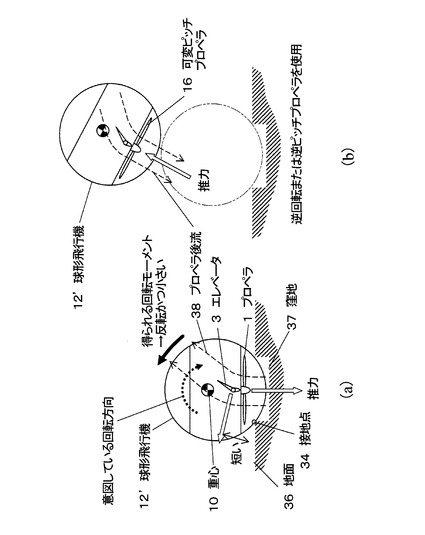
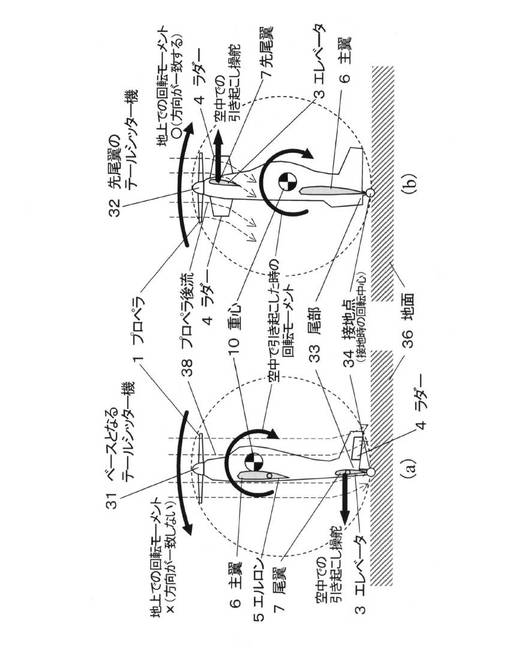
本発明者は、第1の目的に係るテールシッター機を案出するための出発点として、まず図1(a)に示すように、ベースとなるテールシッター機31を想定した。
このベースとなるテールシッター機31は、推進装置に大径のプロペラ1を用いて推力重量比1以上を達成し、プロペラ後流38内にエルロン5、エレベータ3、ラダー4が配置されているものである。このような機体であれば、機体を垂直に立てた状態でホバリングをしても、機体のロール、ピッチ、ヨー軸のコントロールが可能である。
【0028】
さらに、本発明の目的を考慮すると、飛行機は進出先での着陸及び再離陸も想定しているため、離着陸に特別な発進装置や回収装置を使用せず、機体の尾部33を接地させた状態から垂直離陸し、垂直着陸は尾部33を接地させることで行うこととする。
【0029】
第1発明のベースの機体としては簡素な構造である単発機とし、プロペラ1の反トルクについては、エルロン5で打ち消すこととするが、図9(c)に示したような2重反転プロペラ27または多発のプロペラを反転させることによって、プロペラ1の反トルクを相殺することも重量増加とのトレードオフにより可能である。
【0030】
図9(a)に示したような通常の固定翼機22の場合、重心付近に主翼、重心から離れた後方に尾翼が配置されており、エレベータ3及びラダー4は、尾翼7の後端に配置されている。このような固定翼機22が水平飛行中に機首を引き起こす際には、エレベータ3の後縁を上げ、尾翼7に下向きのカを発生させることによって頭上げモーメントを発生させる必要がある。
【0031】
このような構造であるテールシッター機31の垂直離陸について考える。図1(a)に示すように、空中での引き起こし操作と同じ様にエレベータ3を動かすと、プロペラ1の後流38が舵面にあたり、空中と同じ方向に力が働くが、接地中は重心10を中心とした回転運動ではなく、接地点34を中心とした回転運動となるため、引き起こしとは反対の方向に機体が傾いてしまい、制御が困難となる。この原因はピッチングモーメントを発生する舵面と回転中心の位置関係が空中と接地中で逆転してしまう点にある。
【0032】
したがって、本発明者は、第1の目的を達成すべく、進出先で離着陸が容易なテールシッター機を得るために、空中と接地中の両方において同様の制御方式により機体姿勢を制御できるようにしたテールシッター機を提案する。
【0033】
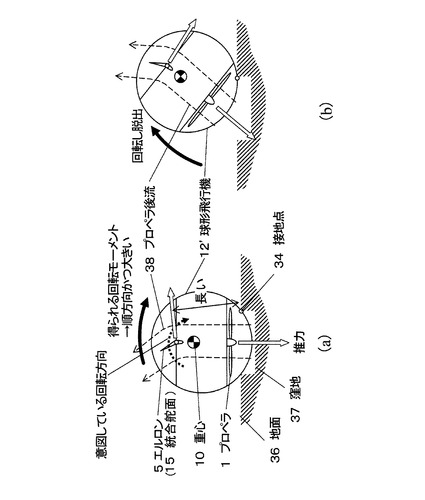
図1(b)に示すように、第1発明のテールシッター機32は、エレベータ3及びラダー4が重心10より前方に配置され、先尾翼形式のテールシッター機となっている。
【0034】
これにより、水平飛行中に縦と方向に関する安定が得られる重心位置及び舵面配置でありながら、空中での引き起こし操舵と同じ操作によって、接地中でも同じ方向に機首を動かすことが可能となる。
【0035】
このことは副次的に、接地中の機体の重心位置が地面に近くなり安定度が増すことと、尾部33と比較して大きくかつ強い構造である主翼6を接地箇所にすることができるというテールシッター機にとってのメリットに貢献している。
【0036】
2.基本発明及び第2発明とその実施形態について
次に、基本の目的を達成するとともに、第2の目的も同時に達成するべく、不整地に対する安全な垂直着陸又は滑走着陸が可能な基本発明の飛行機であって、機体全体が回転移動できるために不整地着陸後に地上移動が可能であり、安定した垂直離陸による再離陸を行なって確実に帰投することができる第2発明の飛行機を提案する。
ここで、第2発明の飛行機は、第1発明のテールシッター機を応用したものであり、その機体を球殻体で囲んで一体化した球形飛行機であることを特徴としている。
【0037】
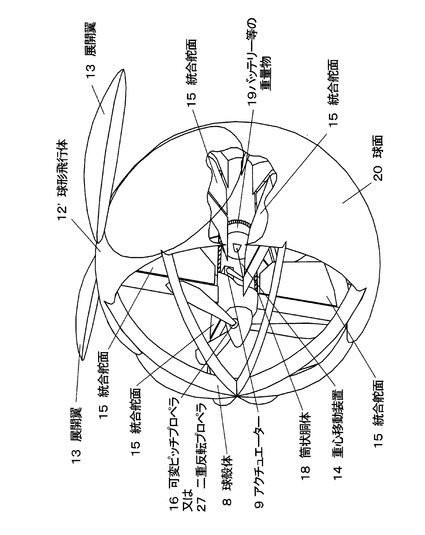
図2に示すように、この球形飛行機12は、第1発明と実質的に同様の基本構造を有するテールシッター機32と、このテールシッター機32を内部に取り囲んで機体と一体に連結された球殻体8とを有している。
【0038】
図2に示すように、テールシッター機32は、機体に設けられたプロペラ推進装置としての電動モータ等の原動機2と、原動機2に連動連結されて回転駆動されるプロペラ1を有している。
【0039】
また、機体に設けられて前記プロペラの後流内に配された3舵(エレベータ、ラダー、エルロン)のうち、全体の重心10よりも前方にエレベータ3及びラダー4が設けられ、垂直離着陸及び通常巡行飛行が可能とされている。
【0040】
また、重心10よりも前方には、機体と球殻体8を連結する4枚の尾翼7が90°間隔で4枚設けられており、前記エレベータ3及び前記ラダー4は互いに90°間隔となるように2枚ずつの前記尾翼7に設けられている。なお、この尾翼7は、重心10よりも前方に配置されていることから先尾翼と呼ぶこともできる。また、重心10よりも後方には、機体と球殻体8を連結する4枚の主翼6が尾翼7の間の位置となるように90°間隔で4枚設けられ、前記エルロン5は該主翼6に設けられている。
【0041】
図2に示すように、球殻体8は、外面が閉止された完全な球面から構成されるものではない。外形を完全な球面で覆ってしまうと、航空機としての機能を果たさないため、飛行方向についての前部及び後部については、少なくともプロペラ1の直径に相当する面積分は開放されている必要がある。本実施形態では、地上で効率良く回転できること、地上回転中にプロペラ及び舵面が接地しないこと、推力、揚抗比及び舵効きへの悪影響を少なくすること、軽く丈夫であること並びに製造が容易であることを追求し、図2及び図3(a)に示す外形が球に近い骨組み構造とした。
【0042】
図3(a)に示すように、球殻体8の形状を地球儀に例えて説明すると、推力方向は地軸と平行とし、緯度0度(赤道)及び緯度±30度の緯線と、経度45度刻みの経線に相当する配置の骨組みを互いに連結し、一体構造の剛性の高い球殻体8を構成する。なお、本発明における「球殻体」とは、必ずしも完全な球形状のみを意味するのではなく、この他にも正12面体、正20面体及びサッカーボール型のような地上を転動しやすい球に近い形状も含むものとする。
【0043】
また、図3(b)のように、緯度−30〜+30度の範囲を完全な球面20の一部で帯状に覆うこともできる。このようにすれば、全体の剛性をより高めることができ、また内部に配置する飛行機の接続位置をより自由に選ぶことができる。この帯状の部分は図3(b)のように板材でもよいが、網で覆えば飛行安定への影響を極限できるため飛行機としてはより好ましい。
【0044】
図4に示すように、本実施形態の球形飛行機12は、着陸した後、地面36の上を回転して移動し、障害物があればこれを乗り越え、最後には適当な姿勢になって再離陸することが予定されている。ここで、球殻体8自体が地面36上で効率よく転がるためには、重心10が球殻体8の中心にある必要がある。しかしながら、先尾翼形式のテールシッター機32の外形を球に近い本実施形態のような球殻体8とした場合、地上で垂直状態から90度以上傾くと、舵角に対する回転モーメントの方向が逆転する。したがって、連続して回転するには1回転できる程度の回転速度を、機体が上を向いている間に与え続け、惰性で1回転した後、再び機体が上を向いている間に回転モーメントを与えるといった操作が必要となる。このことから、本実施形態の球形飛行機12では、図4に示すように重心位置を球の中心よりも僅かに下げることによって起き上がり小法師のような効果で、何も外力を与えない状態では自然と機首が上を向くように設定する。これにより、スムーズな垂直離陸も可能となる。
【0045】
また、離陸を容易にするために、球殻体8の底を僅かにプロペラ1の回転面と平行な面でカットし、略円形の平坦面を設けておくことも有効である。
【0046】
重心位置が球の中心よりも僅かに下(水平飛行中では後方)になったことにより、空中でのコントロールモーメントを稼ぐためにはエレベータ3及びラダー4の面積を大きく、かつできるだけ前方に配置し重心までの距離を大きくしなければならない。しかし、前方にはプロペラ1があり、プロペラ1を前方に配置するにつれ、球殻体8内に収まるプロペラ1の直径が小さくなり、ホバリング中の姿勢制御に必要とする後流38の範囲が狭くなることとなる。
【0047】
したがって、必要なプロペラ1の直径はホバリング時に必要なエレベータ3及びラダー4等の舵面の大きさから決定し、その位置は球殻体8内においてできる限り前方に配置することとする。プロペラ1の位置が決まれば、図1を参照して前述したように、その直後にエレベータ3及びラダー4を配置する。
【0048】
上記により、舵面が大きくなり、縦と方向の静安定を得るために主翼6及び垂直安定板を大きくかつ後方に配置しなければならないが、それらを狭い球殻体8内に収めるためには工夫が必要である。球殻体8内の前後の距離には限界があるため、エレベータ3またはラダー4が大きな舵角となった場合、後流38が主翼6等へ大きく干渉することとなる。この干渉をできる限り減らすため、図1を参照して前述したように、主翼6はエレベータ3とラダー4の軸の中間の45度となるようにX翼配置とする。
【0049】
垂直離陸時に発生するプロペラ1の反トルクを押さえるエルロン5については、トルクの大きさと舵効きから、図1を参照して前述したように、これらの後方に4枚設置することとしている。
【0050】
このように、第1発明のテールシッター機32を球殻体8の内部に取り付けた本実施形態の球形飛行機12によれば、特別な可動装置を必要とせずに進出先での垂直離着陸、水平飛行、地上移動及び滑走着陸が可能となる。
【0051】
すなわち図4に示すように、機体外形が球形であれば、第1発明のテールシッター機32における姿勢制御機能を利用し、地上においてもプロペラ後流38とエレベータ3やラダー4等の舵面が発生するコントロールモーメント(図ではエレベータ操舵により発生する空気力の矢印として表現)により、機体を移動させたい方向に姿勢を傾け続けることで、矢印で示すように機体全体の回転移動が可能となる。
【0052】
これにより、地上を移動するたびに飛び上がらなくて済むため、エネルギーを温存できかつ安全である。回転移動では乗り越えることが困難な大きな段差や急斜面に直面した場合のみ、一時的に離陸し飛び越えることとなる。
【0053】
また、外形を球殻体8にすることにより、不整地での地上移動が可能になること以外にも、次の3つの効果を得ることができる。
【0054】
まず1つ目は、外形が球であるため、球殻体8内に設けたテールシッター機32が地上で機体が倒れて破損または再離陸不可能となる心配がなくなり、厳密に垂直姿勢を保持し、速度をほぼ0にしなくとも、沈下率を守るだけで垂直着陸が可能となる。地上移動能力も考慮すると、従来機では着陸すべきではない不整地にも着陸が可能となる。
【0055】
2つ目は、本例のような球形飛行機12が滑走着陸を行う際には、沈下率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら無事に着陸することができる。テールシッター機32に滑走着陸の能力があるということは、風が強い状況において、非常に難しい垂直着陸を行わなくとも安定した着陸が行えるため、確実に帰投が可能となることを意味している。
【0056】
3つ目は、機体を球殻体8で覆っているため、図5に示すように地面との接触以外にも、壁35や図示しない天井等との接触に強くなることが挙げられる。図5(a)〜(c)に示すように、本実施形態の球形飛行機12がホバリング中に壁35等の障害物に接触した場合には、接触直前の推力からの増分が、球形飛行機12を壁35に押しつける方向に傾けさせ、その状態から推力を減らすと、接触点を支点としながら垂直姿勢に戻るため、接触位置を保持することも可能となる。
【0057】
次に、図2に示した本実施形態の球形飛行機及び図6に示す本実施形態の変形例の球形飛行機のさらに詳細な特徴部分について説明する。なお、図6に示す変形例の球形飛行機の基本的構成は図2の球形飛行機と実質的に略同一であるので、当該基本構成については前述した実施形態の説明を援用して適宜省略するものとする。
【0058】
図2の実施形態の球形飛行機12では、重心10を球殻体8の中心よりも僅かに下方に設定したが、この重心10の位置は可変である。すなわち球形飛行機12は、重心10の位置を変更するための重心移動制御手段を備えている。この重心移動制御手段は、機体の重量物であるペイロードやバッテリー19、原動機2等を移動させるアクチュエータ9と、これを駆動制御する制御装置11からなり、これら重量物を移動させることにより、飛行機全体の重心10の位置を、球形飛行機12の運航態様乃至使用場面毎に適した位置に任意に変更することができる。例えば、球形飛行機12は、地上回転移動、垂直離陸、ホバリング、通常巡航飛行を含む種々の運航態様をとることができ、それぞれの運航態様乃至使用場面毎に最適な重心位置は微妙に異なるが、本例によれば重心移動制御手段によって重心の位置を最適に設定し、最適な飛行乃至移動時の制御を行なうことができる。
【0059】
図6に示した変形例の球形飛行機12’も重心移動制御手段としての重心移動装置14を備えている。変形例における重心移動装置14は、筒状胴体18の内部に設けられたバッテリー等の重量物19を移動させるアクチュエータ9と、図示しない制御手段とを含んでいる。
【0060】
本変形例によれば、重心移動装置14によってエンジン2の下の筒状胴体18の中でサーボ等のアクチュエーター9を用いて重量物19を上下させる。例えば、地上回転移動中は球の中心に重心10を移動させ、離陸からホバリングにおいてはできる限り下方に重心10を移動させ、水平飛行時は縦安定と巡航効率を考慮した位置に重心10を移動させる。
【0061】
次に、変形例の球形飛行機12’が逆さまになった状態で窪地にはまる等、図7及び図8のような脱出できない状況下で脱出するための機能について説明する。
【0062】
球形飛行機12’は、地面36の上を回転移動中に一時的に逆さまになっても、基本的には回転の慣性力で通過または起き上がり小法師の原理で起き上がることになる。しかし、図7及び図8に示すように、不幸にも逆さまの状態で窪地37等にはまり、姿勢を拘束された場合には、推力は機体を地面に押しつける方向にしか働かず、エレベータ3及びラダー4(不図示)も回転重心となる地上からの距離が短くなることと、操舵と回転力の方向が逆転することのため、制御が困難となる。
【0063】
そこで、変形例の球形飛行機12’は、図6に示すように可変ピッチプロペラ16又は二重反転プロペラ27を有しており、これらを逆ピッチとして推力方向を反転させることによって、図7(b)のように脱出することができる。
【0064】
また、図8に示すように、逆さまの状態では、主翼の後端にあるエルロン5を統合舵面15としてエレベータまたはラダーのように機能させることとすれば、球体飛行体12’に図8(b)に示すような適切な回転力を与えて窪地37から脱出することができる。脱出以外の場面において、エレベータ及びラダーにもエルロンとしての機能を付加し、8つの舵面を統合舵面15として地上移動、離着陸、水平飛行の場面にあわせて必要なモーメントを発生するための舵角を配分することによって効率良く飛行及び移動することが可能となる。
【0065】
次に、変形例の球形飛行機12’は、図6に示すように、水平飛行状態において展開翼13を展開する機能を備えている。球形飛行機12’は地上で転がることを前提としているため、展開翼13は、図6のように球殻体8の一部を覆う球面20の一部を成すこととなる。球面20をわざわざ翼型として用いている航空機は無いが、球形飛行機12’においては、球面20の一部をそのまま展開することで機体の簡素化を図ることができる。展開翼13は水平飛行中のみ展開し、エネルギー効率と飛行安定の増加に寄与する。
【0066】
以上説明したように、本発明の基本発明に係る球形飛行機によれば、外形が球であるため着陸時に破損が生じにくく、不整地にも着陸が可能である。また、垂直着陸機の場合であっても条件に応じて滑走着陸が可能であり、その場合には沈降率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら着陸できる。また、機体を球殻で覆っているため、地面との接触以外にも強くなり、例えば建物の壁や天井等との接触にも強い。
【0067】
さらに、本発明の第1発明に係るテールシッター機によれば、水平飛行中に縦と方向に関する安定が得られる重心位置及び舵面配置でありながら、空中での引き起こし操舵と同じ操作で接地中でも同じ方向に機首を動かすことができ、また接地中の機体の重心位置が地面に近くなり安定度が増し、強い構造の主翼を接地箇所にできるというメリットがある。
【0068】
さらに、本発明の第2発明に係る球形飛行機によれば、基本発明の効果に加え、第1発明のテールシッター機の姿勢制御を利用し、地上においてもプロペラ後流と舵面が発生するコントロールモーメントにより、機体を移動させたい方向に姿勢を傾け続けることで、機体全体を任意の方向に回転移動させて地上を移動していくことが可能となる。これにより、地上を移動するためにその都度飛び上がる必要がなく、回転移動では乗り越えることが困難な大きな段差や急斜面に直面した場合のみ、一時的に離陸し飛び越えればよく、エネルギーを温存できかつ安全である。
【0069】
なお、以上の説明では、基本発明と第2発明を、第1発明のテールシッター機を球殻体内に取り付けた球形飛行機の実施形態で説明したが、基本発明としては、球殻体内に取り付ける飛行機は別に第1発明のテールシッター機に限らず、従来のテールシッター機であっても、通常の固定翼機であってもよく、このような組み合わせによっても、少なくとも着陸を従来よりも安定して行なえる等、前述したような効果がある。
【符号の説明】
【0070】
1…プロペラ
2…重量物である電動モータ等の原動機
3…3舵の一つであるエレベータ
4…3舵の一つであるラダー
5…3舵の一つであるエルロン
6…主翼
7…尾翼
8…球殻体
9…重心移動制御手段を構成するアクチュエータ
10…重心
11…重心移動制御手段を構成する制御装置
12,12’…球形飛行機
13…展開翼
14…重心移動制御手段としての重心移動装置
16…可変ピッチプロペラ
19…バッテリー等の重量物
27…二重反転プロペラ
38…プロペラの後流
【技術分野】
【0001】
本発明は、主として垂直離着陸及び通常巡航飛行が可能な航空機に係り、特に進出先での着陸、地上移動及び再離陸が容易な球形飛行機と、進出先での離着陸を容易とするために空中と接地中の両方において同様の制御方式で機体姿勢を制御することができるテールシッター機(テールシッター型VTOL機)に関する。
【背景技術】
【0002】
図9に示すように、従来の各種航空機には、同図(a)に示す通常の固定翼機22の他、同図(b)に示すヘリコプター23や、同図(c)に示すテールシッター型VTOL機21のように、垂直離着陸が可能な航空機(VTOL機)がある。
【0003】
垂直離着陸が可能な航空機(VTOL機)は、離着陸の際に地表面近くに大きな空間と広い滑走面を必要としないため、市街地、不整地、森林及び山岳等での離着陸も場合によっては可能であり、柔軟な運用が可能であることを特長とする。また、VTOL機は必然的に空中で速度を0、つまりホバリングができるため、地上からは接近できない現場の詳細な情報収集に有用である。さらに、進出先に垂直着陸に必要な地形があれば、エネルギー効率の悪いホバリングを行わなくとも、着陸して定常的な情報収集及び待機時間の延伸が可能である。
【0004】
しかし、図9(b)に示したヘリコプター23等の典型的なVTOL機は、固定翼機22のように翼を利用した効率の良い高速巡航飛行ができず、速度、進出距離、滞空時間等の性能面においては優れているとは言えない。また、離着陸の際には非線形的な複雑な操作を必要とするうえ、不整地において自力での地上移動はほぼ不可能であり、着陸地点の地形と姿勢によっては再離陸ができない場合がある。
【0005】
そこで、VTOL機の巡航時の性能を向上させる一つの方法としてテールシッター方式がある。図9(c)に示すテールシッター型VTOL機21は、通常の固定翼機22と同様に、巡航中は固定翼である主翼6を用いた高効率の高速飛行を行うが、離着陸時には機体を垂直に立てて推力方向を上向きにし、機体重量とほぼ同じ推力を用いて機体を浮遊させ、尾部33を下にしたまま離着陸を行う。そのため、テールシッター型VTOL機21は複雑で重量増加となるティルト機構等を必要とせず、比較的簡素な機体構成でありながら通常巡航飛行及び定点での離着陸の能力も兼ね備えているという特長を持っている。
【0006】
下記特許文献1及び2には、この種のテールシッター型VTOL機についての発明が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−213397号公報
【特許文献2】米国特許第5289994号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
一方で、従来のテールシッター型VTOL機21は推力重量比が1以上である推進装置を搭載しなければならない、速度Oにおいて姿勢制御が可能となるように工夫する必要がある、巡航飛行〜ホバリング間の遷移飛行の空力制御が難しい、風が強い状況においても機体を垂直に立てた状態で着地させる必要がある、接地前後の姿勢制御が非常に困難、地上での自力移動は不可能といった多くの短所がある。
【0009】
障害物との接触については、通常、図9(c)に示すテールシッター型VTOL機21は降着装置30以外の部分が他の物と接触することは想定されていないため、障害物との接触の可能性が非常に高い災害現場、屋内及び森林等の環境では、航空機を飛行させることは危険である。また、進出先で着陸時に機体が倒れてしまった場合は、機体が破損するだけでなく、そこから再離陸することは不可能である。
【0010】
したがって、現時点では「狭い場所からの垂直離陸→翼を用いた高速巡航飛行で進出→目的地上空にて情報収集のため滞空またはホバリング→長時間の情報収集のため目的地周辺に着地→さらに詳細情報を取得するため地上移動で接近→障害物を乗り越える→任務達成後に再離陸→高速巡航飛行にて帰投→風により垂直着陸が難しい場合は滑走着陸」といった非常に柔軟で有用な使用用途を実現できる航空機は存在しない。
【0011】
本発明はこうした実状に鑑みてなされたものであり、上記の用途の少なくとも一部を実現できる飛行機を提案することを目的としている。
より具体的には、まず後述する新規なテールシッター機には限定しないが、垂直着陸又は滑走着陸が可能な飛行機を球殻内に取り付けることにより上記の用途の少なくとも一部を実現できる球形飛行機を提案することを基本の目的としている。次に、垂直離着陸及び高速巡航飛行が可能で機体構成が簡素であり、制御も容易な新規なテールシッター機を実現することを第1の目的としている。そして、この新規なテールシッター機を球殻内に取り付けることにより上記の用途を実現できる球形飛行機を提案することを第2の目的としている。
【課題を解決するための手段】
【0012】
基本の目的に係る請求項1に記載された基本発明の球形飛行機は、
プロペラ推進装置の後流内に3舵を配した垂直着陸又は滑走着陸が可能な飛行機と、
前記飛行機を囲んで前記飛行機と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴としている。
【0013】
第1の目的に係る請求項2に記載された第1発明のテールシッター機は、
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵とを有し、垂直離着陸及び通常巡行飛行が可能なテールシッター機において、
重心よりも前方にエレベータ及びラダーが設けられたことを特徴としている。
【0014】
第2の目的に係る請求項3に記載された第2発明の球形飛行機は、
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵のうち、全体の重心よりも前方にエレベータ及びラダーが設けられ、垂直離着陸及び通常巡行飛行が可能とされたテールシッター型VTOL機と、
前記テールシッター型VTOL機を囲んで前記機体と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴としている。
【0015】
請求項4に記載された球形飛行機は、請求項3記載の球形飛行機において、
全体の重心よりも前方において前記機体と前記球殻体を連結する4枚の先尾翼が90°間隔で設けられ、前記エレベータ及び前記ラダーは互いに90°間隔で2枚ずつの前記先尾翼に設けられ、
全体の重心よりも後方において前記機体と前記球殻体を連結する4枚の主翼が前記尾翼の間の位置となるように90°間隔で設けられ、前記エルロンは該主翼に設けられたことを特徴としている。
【0016】
請求項5に記載された球形飛行機は、請求項4記載の球形飛行機において、
地上回転移動、垂直離陸、ホバリング、通常巡航飛行を含む運航態様群から選択される任意の運航態様に適した重心位置を得るために、前記機体に搭載された重量物を前記機体内で移動させるための重心移動制御手段を有することを特徴としている。
【0017】
請求項6に記載された球形飛行機は、請求項4記載の球形飛行機において、
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、プロペラ推進装置におけるプロペラピッチ角を逆ピッチにし又はプロペラ回転方向を逆にすることにより、推力の方向を反転させられるように構成したことを特徴としている。
【0018】
請求項7に記載された球形飛行機は、請求項4記載の球形飛行機において、
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、前記主翼の前記エルロンを動作させて回転モーメントを発生するように構成したことを特徴としている。
【0019】
請求項8に記載された球形飛行機は、請求項4記載の球形飛行機において、
通常巡航飛行中に飛行効率と安定性を向上させるために、前記球殻体の一部を展開翼として展開できることを特徴としている。
【0020】
請求項9に記載された球形飛行機は、請求項1、3乃至8のいずれか1つに記載の球形飛行機において、
遠隔操縦、自律行動が可能な無人機であることを特徴としている。
【発明の効果】
【0021】
基本発明の球形飛行機によれば、外形が球であるため着陸時に破損が生じにくく、従来機では着陸できないような不整地にも着陸が可能となる。また、垂直着陸機の場合であっても天候や地上の条件に応じて滑走着陸が可能となる。また、その場合には、沈降率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら着陸できるので、困難な垂直着陸を行なわなくとも安定した着陸が行なえるので、帰投が確実になる。また、機体を球殻で覆っているため、地面との接触以外にも強くなり、例えば建物の壁や天井等との接触にも強い。
【0022】
第1発明のテールシッター機によれば、水平飛行中に縦と方向に関する安定が得られる重心位置及び舵面配置でありながら、空中での引き起こし操舵と同じ操作によって、接地中でも同じ方向に機首を動かすことが可能となる。このことは副次的に、接地中の機体の重心位置が地面に近くなり安定度が増すことと、尾翼と比較して大きくかつ強い構造である主翼を接地箇所にすることができるというテールシッター機にとってのメリットに貢献することとなる。
【0023】
第2発明の球形飛行機によれば、外形が球であるため着陸時に破損が生じにくく、従来機では着陸できないような不整地にも着陸が可能となる。また、垂直着陸機が可能であるとともに、天候や地上の条件に応じて滑走着陸も可能となる。また、その場合には、沈降率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら着陸できるので、条件によっては困難となる垂直着陸を行なわなくとも安定した着陸が行なえるので、帰投が確実になる。また、機体を球殻で覆っているため、地面との接触以外にも強くなり、例えば建物の壁や天井等との接触にも強い。
【0024】
さらに、その構成として取り込んだ第1発明のテールシッター機の姿勢制御を利用し、地上においてもプロペラ後流と舵面が発生するコントロールモーメントにより、機体を移動させたい方向に姿勢を傾け続けることで、機体全体の回転移動が可能となる。
【0025】
これにより、地上を移動するたびに飛び上がらなくて済むため、エネルギーを温存できかつ安全である。回転移動では乗り越えることが困難な大きな段差や急斜面に直面した場合のみ、一時的に離陸し飛び越えることとなる。
【図面の簡単な説明】
【0026】
【図1】(a)は第1発明のベースとして本発明者が想定したテールシッター機の地上での姿勢制御を示す図、(b)は第1発明のテールシッター機の地上での姿勢制御を示す図である。
【図2】図2は基本発明乃至第2発明の実施形態である球形飛行機の構成を示す図である。
【図3】図3は基本発明乃至第2発明の実施形態である球形飛行機の外形を示す図である。
【図4】図4は基本発明乃至第2発明の実施形態である球形飛行機の回転方法を示す図である。
【図5】図5は基本発明乃至第2発明の実施形態である球形飛行機が壁に接触した際の挙動を示す図である。
【図6】図6は基本発明乃至第2発明の実施形態である球形飛行機の変形例を示す図である。
【図7】図7は基本発明乃至第2発明の変形例の球形飛行機が、推力反転により、逆さまの状態から脱出する方法を示す図である。
【図8】図8は基本発明乃至第2発明の変形例の球形飛行機が、統合舵面により、逆さまの状態から脱出する方法を示す図である。
【図9】図9は従来の各種航空機及びその着陸方式を示す図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態を図1〜図9を参照して説明する。
1.第1発明とその実施形態について
本発明者は、第1の目的に係るテールシッター機を案出するための出発点として、まず図1(a)に示すように、ベースとなるテールシッター機31を想定した。
このベースとなるテールシッター機31は、推進装置に大径のプロペラ1を用いて推力重量比1以上を達成し、プロペラ後流38内にエルロン5、エレベータ3、ラダー4が配置されているものである。このような機体であれば、機体を垂直に立てた状態でホバリングをしても、機体のロール、ピッチ、ヨー軸のコントロールが可能である。
【0028】
さらに、本発明の目的を考慮すると、飛行機は進出先での着陸及び再離陸も想定しているため、離着陸に特別な発進装置や回収装置を使用せず、機体の尾部33を接地させた状態から垂直離陸し、垂直着陸は尾部33を接地させることで行うこととする。
【0029】
第1発明のベースの機体としては簡素な構造である単発機とし、プロペラ1の反トルクについては、エルロン5で打ち消すこととするが、図9(c)に示したような2重反転プロペラ27または多発のプロペラを反転させることによって、プロペラ1の反トルクを相殺することも重量増加とのトレードオフにより可能である。
【0030】
図9(a)に示したような通常の固定翼機22の場合、重心付近に主翼、重心から離れた後方に尾翼が配置されており、エレベータ3及びラダー4は、尾翼7の後端に配置されている。このような固定翼機22が水平飛行中に機首を引き起こす際には、エレベータ3の後縁を上げ、尾翼7に下向きのカを発生させることによって頭上げモーメントを発生させる必要がある。
【0031】
このような構造であるテールシッター機31の垂直離陸について考える。図1(a)に示すように、空中での引き起こし操作と同じ様にエレベータ3を動かすと、プロペラ1の後流38が舵面にあたり、空中と同じ方向に力が働くが、接地中は重心10を中心とした回転運動ではなく、接地点34を中心とした回転運動となるため、引き起こしとは反対の方向に機体が傾いてしまい、制御が困難となる。この原因はピッチングモーメントを発生する舵面と回転中心の位置関係が空中と接地中で逆転してしまう点にある。
【0032】
したがって、本発明者は、第1の目的を達成すべく、進出先で離着陸が容易なテールシッター機を得るために、空中と接地中の両方において同様の制御方式により機体姿勢を制御できるようにしたテールシッター機を提案する。
【0033】
図1(b)に示すように、第1発明のテールシッター機32は、エレベータ3及びラダー4が重心10より前方に配置され、先尾翼形式のテールシッター機となっている。
【0034】
これにより、水平飛行中に縦と方向に関する安定が得られる重心位置及び舵面配置でありながら、空中での引き起こし操舵と同じ操作によって、接地中でも同じ方向に機首を動かすことが可能となる。
【0035】
このことは副次的に、接地中の機体の重心位置が地面に近くなり安定度が増すことと、尾部33と比較して大きくかつ強い構造である主翼6を接地箇所にすることができるというテールシッター機にとってのメリットに貢献している。
【0036】
2.基本発明及び第2発明とその実施形態について
次に、基本の目的を達成するとともに、第2の目的も同時に達成するべく、不整地に対する安全な垂直着陸又は滑走着陸が可能な基本発明の飛行機であって、機体全体が回転移動できるために不整地着陸後に地上移動が可能であり、安定した垂直離陸による再離陸を行なって確実に帰投することができる第2発明の飛行機を提案する。
ここで、第2発明の飛行機は、第1発明のテールシッター機を応用したものであり、その機体を球殻体で囲んで一体化した球形飛行機であることを特徴としている。
【0037】
図2に示すように、この球形飛行機12は、第1発明と実質的に同様の基本構造を有するテールシッター機32と、このテールシッター機32を内部に取り囲んで機体と一体に連結された球殻体8とを有している。
【0038】
図2に示すように、テールシッター機32は、機体に設けられたプロペラ推進装置としての電動モータ等の原動機2と、原動機2に連動連結されて回転駆動されるプロペラ1を有している。
【0039】
また、機体に設けられて前記プロペラの後流内に配された3舵(エレベータ、ラダー、エルロン)のうち、全体の重心10よりも前方にエレベータ3及びラダー4が設けられ、垂直離着陸及び通常巡行飛行が可能とされている。
【0040】
また、重心10よりも前方には、機体と球殻体8を連結する4枚の尾翼7が90°間隔で4枚設けられており、前記エレベータ3及び前記ラダー4は互いに90°間隔となるように2枚ずつの前記尾翼7に設けられている。なお、この尾翼7は、重心10よりも前方に配置されていることから先尾翼と呼ぶこともできる。また、重心10よりも後方には、機体と球殻体8を連結する4枚の主翼6が尾翼7の間の位置となるように90°間隔で4枚設けられ、前記エルロン5は該主翼6に設けられている。
【0041】
図2に示すように、球殻体8は、外面が閉止された完全な球面から構成されるものではない。外形を完全な球面で覆ってしまうと、航空機としての機能を果たさないため、飛行方向についての前部及び後部については、少なくともプロペラ1の直径に相当する面積分は開放されている必要がある。本実施形態では、地上で効率良く回転できること、地上回転中にプロペラ及び舵面が接地しないこと、推力、揚抗比及び舵効きへの悪影響を少なくすること、軽く丈夫であること並びに製造が容易であることを追求し、図2及び図3(a)に示す外形が球に近い骨組み構造とした。
【0042】
図3(a)に示すように、球殻体8の形状を地球儀に例えて説明すると、推力方向は地軸と平行とし、緯度0度(赤道)及び緯度±30度の緯線と、経度45度刻みの経線に相当する配置の骨組みを互いに連結し、一体構造の剛性の高い球殻体8を構成する。なお、本発明における「球殻体」とは、必ずしも完全な球形状のみを意味するのではなく、この他にも正12面体、正20面体及びサッカーボール型のような地上を転動しやすい球に近い形状も含むものとする。
【0043】
また、図3(b)のように、緯度−30〜+30度の範囲を完全な球面20の一部で帯状に覆うこともできる。このようにすれば、全体の剛性をより高めることができ、また内部に配置する飛行機の接続位置をより自由に選ぶことができる。この帯状の部分は図3(b)のように板材でもよいが、網で覆えば飛行安定への影響を極限できるため飛行機としてはより好ましい。
【0044】
図4に示すように、本実施形態の球形飛行機12は、着陸した後、地面36の上を回転して移動し、障害物があればこれを乗り越え、最後には適当な姿勢になって再離陸することが予定されている。ここで、球殻体8自体が地面36上で効率よく転がるためには、重心10が球殻体8の中心にある必要がある。しかしながら、先尾翼形式のテールシッター機32の外形を球に近い本実施形態のような球殻体8とした場合、地上で垂直状態から90度以上傾くと、舵角に対する回転モーメントの方向が逆転する。したがって、連続して回転するには1回転できる程度の回転速度を、機体が上を向いている間に与え続け、惰性で1回転した後、再び機体が上を向いている間に回転モーメントを与えるといった操作が必要となる。このことから、本実施形態の球形飛行機12では、図4に示すように重心位置を球の中心よりも僅かに下げることによって起き上がり小法師のような効果で、何も外力を与えない状態では自然と機首が上を向くように設定する。これにより、スムーズな垂直離陸も可能となる。
【0045】
また、離陸を容易にするために、球殻体8の底を僅かにプロペラ1の回転面と平行な面でカットし、略円形の平坦面を設けておくことも有効である。
【0046】
重心位置が球の中心よりも僅かに下(水平飛行中では後方)になったことにより、空中でのコントロールモーメントを稼ぐためにはエレベータ3及びラダー4の面積を大きく、かつできるだけ前方に配置し重心までの距離を大きくしなければならない。しかし、前方にはプロペラ1があり、プロペラ1を前方に配置するにつれ、球殻体8内に収まるプロペラ1の直径が小さくなり、ホバリング中の姿勢制御に必要とする後流38の範囲が狭くなることとなる。
【0047】
したがって、必要なプロペラ1の直径はホバリング時に必要なエレベータ3及びラダー4等の舵面の大きさから決定し、その位置は球殻体8内においてできる限り前方に配置することとする。プロペラ1の位置が決まれば、図1を参照して前述したように、その直後にエレベータ3及びラダー4を配置する。
【0048】
上記により、舵面が大きくなり、縦と方向の静安定を得るために主翼6及び垂直安定板を大きくかつ後方に配置しなければならないが、それらを狭い球殻体8内に収めるためには工夫が必要である。球殻体8内の前後の距離には限界があるため、エレベータ3またはラダー4が大きな舵角となった場合、後流38が主翼6等へ大きく干渉することとなる。この干渉をできる限り減らすため、図1を参照して前述したように、主翼6はエレベータ3とラダー4の軸の中間の45度となるようにX翼配置とする。
【0049】
垂直離陸時に発生するプロペラ1の反トルクを押さえるエルロン5については、トルクの大きさと舵効きから、図1を参照して前述したように、これらの後方に4枚設置することとしている。
【0050】
このように、第1発明のテールシッター機32を球殻体8の内部に取り付けた本実施形態の球形飛行機12によれば、特別な可動装置を必要とせずに進出先での垂直離着陸、水平飛行、地上移動及び滑走着陸が可能となる。
【0051】
すなわち図4に示すように、機体外形が球形であれば、第1発明のテールシッター機32における姿勢制御機能を利用し、地上においてもプロペラ後流38とエレベータ3やラダー4等の舵面が発生するコントロールモーメント(図ではエレベータ操舵により発生する空気力の矢印として表現)により、機体を移動させたい方向に姿勢を傾け続けることで、矢印で示すように機体全体の回転移動が可能となる。
【0052】
これにより、地上を移動するたびに飛び上がらなくて済むため、エネルギーを温存できかつ安全である。回転移動では乗り越えることが困難な大きな段差や急斜面に直面した場合のみ、一時的に離陸し飛び越えることとなる。
【0053】
また、外形を球殻体8にすることにより、不整地での地上移動が可能になること以外にも、次の3つの効果を得ることができる。
【0054】
まず1つ目は、外形が球であるため、球殻体8内に設けたテールシッター機32が地上で機体が倒れて破損または再離陸不可能となる心配がなくなり、厳密に垂直姿勢を保持し、速度をほぼ0にしなくとも、沈下率を守るだけで垂直着陸が可能となる。地上移動能力も考慮すると、従来機では着陸すべきではない不整地にも着陸が可能となる。
【0055】
2つ目は、本例のような球形飛行機12が滑走着陸を行う際には、沈下率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら無事に着陸することができる。テールシッター機32に滑走着陸の能力があるということは、風が強い状況において、非常に難しい垂直着陸を行わなくとも安定した着陸が行えるため、確実に帰投が可能となることを意味している。
【0056】
3つ目は、機体を球殻体8で覆っているため、図5に示すように地面との接触以外にも、壁35や図示しない天井等との接触に強くなることが挙げられる。図5(a)〜(c)に示すように、本実施形態の球形飛行機12がホバリング中に壁35等の障害物に接触した場合には、接触直前の推力からの増分が、球形飛行機12を壁35に押しつける方向に傾けさせ、その状態から推力を減らすと、接触点を支点としながら垂直姿勢に戻るため、接触位置を保持することも可能となる。
【0057】
次に、図2に示した本実施形態の球形飛行機及び図6に示す本実施形態の変形例の球形飛行機のさらに詳細な特徴部分について説明する。なお、図6に示す変形例の球形飛行機の基本的構成は図2の球形飛行機と実質的に略同一であるので、当該基本構成については前述した実施形態の説明を援用して適宜省略するものとする。
【0058】
図2の実施形態の球形飛行機12では、重心10を球殻体8の中心よりも僅かに下方に設定したが、この重心10の位置は可変である。すなわち球形飛行機12は、重心10の位置を変更するための重心移動制御手段を備えている。この重心移動制御手段は、機体の重量物であるペイロードやバッテリー19、原動機2等を移動させるアクチュエータ9と、これを駆動制御する制御装置11からなり、これら重量物を移動させることにより、飛行機全体の重心10の位置を、球形飛行機12の運航態様乃至使用場面毎に適した位置に任意に変更することができる。例えば、球形飛行機12は、地上回転移動、垂直離陸、ホバリング、通常巡航飛行を含む種々の運航態様をとることができ、それぞれの運航態様乃至使用場面毎に最適な重心位置は微妙に異なるが、本例によれば重心移動制御手段によって重心の位置を最適に設定し、最適な飛行乃至移動時の制御を行なうことができる。
【0059】
図6に示した変形例の球形飛行機12’も重心移動制御手段としての重心移動装置14を備えている。変形例における重心移動装置14は、筒状胴体18の内部に設けられたバッテリー等の重量物19を移動させるアクチュエータ9と、図示しない制御手段とを含んでいる。
【0060】
本変形例によれば、重心移動装置14によってエンジン2の下の筒状胴体18の中でサーボ等のアクチュエーター9を用いて重量物19を上下させる。例えば、地上回転移動中は球の中心に重心10を移動させ、離陸からホバリングにおいてはできる限り下方に重心10を移動させ、水平飛行時は縦安定と巡航効率を考慮した位置に重心10を移動させる。
【0061】
次に、変形例の球形飛行機12’が逆さまになった状態で窪地にはまる等、図7及び図8のような脱出できない状況下で脱出するための機能について説明する。
【0062】
球形飛行機12’は、地面36の上を回転移動中に一時的に逆さまになっても、基本的には回転の慣性力で通過または起き上がり小法師の原理で起き上がることになる。しかし、図7及び図8に示すように、不幸にも逆さまの状態で窪地37等にはまり、姿勢を拘束された場合には、推力は機体を地面に押しつける方向にしか働かず、エレベータ3及びラダー4(不図示)も回転重心となる地上からの距離が短くなることと、操舵と回転力の方向が逆転することのため、制御が困難となる。
【0063】
そこで、変形例の球形飛行機12’は、図6に示すように可変ピッチプロペラ16又は二重反転プロペラ27を有しており、これらを逆ピッチとして推力方向を反転させることによって、図7(b)のように脱出することができる。
【0064】
また、図8に示すように、逆さまの状態では、主翼の後端にあるエルロン5を統合舵面15としてエレベータまたはラダーのように機能させることとすれば、球体飛行体12’に図8(b)に示すような適切な回転力を与えて窪地37から脱出することができる。脱出以外の場面において、エレベータ及びラダーにもエルロンとしての機能を付加し、8つの舵面を統合舵面15として地上移動、離着陸、水平飛行の場面にあわせて必要なモーメントを発生するための舵角を配分することによって効率良く飛行及び移動することが可能となる。
【0065】
次に、変形例の球形飛行機12’は、図6に示すように、水平飛行状態において展開翼13を展開する機能を備えている。球形飛行機12’は地上で転がることを前提としているため、展開翼13は、図6のように球殻体8の一部を覆う球面20の一部を成すこととなる。球面20をわざわざ翼型として用いている航空機は無いが、球形飛行機12’においては、球面20の一部をそのまま展開することで機体の簡素化を図ることができる。展開翼13は水平飛行中のみ展開し、エネルギー効率と飛行安定の増加に寄与する。
【0066】
以上説明したように、本発明の基本発明に係る球形飛行機によれば、外形が球であるため着陸時に破損が生じにくく、不整地にも着陸が可能である。また、垂直着陸機の場合であっても条件に応じて滑走着陸が可能であり、その場合には沈降率のみを守れば、どのような姿勢で接地したとしても、破損することなく転がりながら着陸できる。また、機体を球殻で覆っているため、地面との接触以外にも強くなり、例えば建物の壁や天井等との接触にも強い。
【0067】
さらに、本発明の第1発明に係るテールシッター機によれば、水平飛行中に縦と方向に関する安定が得られる重心位置及び舵面配置でありながら、空中での引き起こし操舵と同じ操作で接地中でも同じ方向に機首を動かすことができ、また接地中の機体の重心位置が地面に近くなり安定度が増し、強い構造の主翼を接地箇所にできるというメリットがある。
【0068】
さらに、本発明の第2発明に係る球形飛行機によれば、基本発明の効果に加え、第1発明のテールシッター機の姿勢制御を利用し、地上においてもプロペラ後流と舵面が発生するコントロールモーメントにより、機体を移動させたい方向に姿勢を傾け続けることで、機体全体を任意の方向に回転移動させて地上を移動していくことが可能となる。これにより、地上を移動するためにその都度飛び上がる必要がなく、回転移動では乗り越えることが困難な大きな段差や急斜面に直面した場合のみ、一時的に離陸し飛び越えればよく、エネルギーを温存できかつ安全である。
【0069】
なお、以上の説明では、基本発明と第2発明を、第1発明のテールシッター機を球殻体内に取り付けた球形飛行機の実施形態で説明したが、基本発明としては、球殻体内に取り付ける飛行機は別に第1発明のテールシッター機に限らず、従来のテールシッター機であっても、通常の固定翼機であってもよく、このような組み合わせによっても、少なくとも着陸を従来よりも安定して行なえる等、前述したような効果がある。
【符号の説明】
【0070】
1…プロペラ
2…重量物である電動モータ等の原動機
3…3舵の一つであるエレベータ
4…3舵の一つであるラダー
5…3舵の一つであるエルロン
6…主翼
7…尾翼
8…球殻体
9…重心移動制御手段を構成するアクチュエータ
10…重心
11…重心移動制御手段を構成する制御装置
12,12’…球形飛行機
13…展開翼
14…重心移動制御手段としての重心移動装置
16…可変ピッチプロペラ
19…バッテリー等の重量物
27…二重反転プロペラ
38…プロペラの後流
【特許請求の範囲】
【請求項1】
プロペラ推進装置の後流内に3舵を配した垂直着陸又は滑走着陸が可能な飛行機と、
前記飛行機を囲んで前記飛行機と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴とする球形飛行機。
【請求項2】
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵とを有し、垂直離着陸及び通常巡行飛行が可能なテールシッター機において、
重心よりも前方にエレベータ及びラダーが設けられたことを特徴とするテールシッター機。
【請求項3】
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵のうち、全体の重心よりも前方にエレベータ及びラダーが設けられ、垂直離着陸及び通常巡行飛行が可能とされたテールシッター機と、
前記テールシッター機を囲んで前記機体と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴とする球形飛行機。
【請求項4】
全体の重心よりも前方において前記機体と前記球殻体を連結する4枚の先尾翼が90°間隔で設けられ、前記エレベータ及び前記ラダーは互いに90°間隔で2枚ずつの前記先尾翼に設けられ、
全体の重心よりも後方において前記機体と前記球殻体を連結する4枚の主翼が前記尾翼の間の位置となるように90°間隔で設けられ、前記エルロンは該主翼に設けられたことを特徴とする請求項3記載の球形飛行機。
【請求項5】
地上回転移動、垂直離陸、ホバリング、通常巡航飛行を含む運航態様群から選択される任意の運航態様に適した重心位置を得るために、前記機体に搭載された重量物を前記機体内で移動させるための重心移動制御手段を有することを特徴とする請求項4記載の球形飛行機。
【請求項6】
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、プロペラ推進装置におけるプロペラピッチ角を逆ピッチにし又はプロペラ回転方向を逆にすることにより、推力の方向を反転させられるように構成したことを特徴とする請求項4記載の球形飛行機。
【請求項7】
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、前記主翼の前記エルロンを動作させて回転モーメントを発生するように構成したことを特徴とする請求項4記載の球形飛行機。
【請求項8】
通常巡航飛行中に飛行効率と安定性を向上させるために、前記球殻体の一部を展開翼として展開できることを特徴とする請求項4記載の球形飛行機。
【請求項9】
遠隔操縦、自律行動が可能な無人機であることを特徴とする請求項1、3乃至8のいずれか1つに記載の球形飛行機。
【請求項1】
プロペラ推進装置の後流内に3舵を配した垂直着陸又は滑走着陸が可能な飛行機と、
前記飛行機を囲んで前記飛行機と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴とする球形飛行機。
【請求項2】
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵とを有し、垂直離着陸及び通常巡行飛行が可能なテールシッター機において、
重心よりも前方にエレベータ及びラダーが設けられたことを特徴とするテールシッター機。
【請求項3】
機体と、前記機体に設けられたプロペラ推進装置と、前記機体に設けられて前記プロペラ推進装置の後流内に配された3舵のうち、全体の重心よりも前方にエレベータ及びラダーが設けられ、垂直離着陸及び通常巡行飛行が可能とされたテールシッター機と、
前記テールシッター機を囲んで前記機体と一体に設けられ、少なくとも前記プロペラ推進装置の直径に相当する面積を有する飛行方向についての前部及び後部については開放されている球殻体と、
を有することを特徴とする球形飛行機。
【請求項4】
全体の重心よりも前方において前記機体と前記球殻体を連結する4枚の先尾翼が90°間隔で設けられ、前記エレベータ及び前記ラダーは互いに90°間隔で2枚ずつの前記先尾翼に設けられ、
全体の重心よりも後方において前記機体と前記球殻体を連結する4枚の主翼が前記尾翼の間の位置となるように90°間隔で設けられ、前記エルロンは該主翼に設けられたことを特徴とする請求項3記載の球形飛行機。
【請求項5】
地上回転移動、垂直離陸、ホバリング、通常巡航飛行を含む運航態様群から選択される任意の運航態様に適した重心位置を得るために、前記機体に搭載された重量物を前記機体内で移動させるための重心移動制御手段を有することを特徴とする請求項4記載の球形飛行機。
【請求項6】
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、プロペラ推進装置におけるプロペラピッチ角を逆ピッチにし又はプロペラ回転方向を逆にすることにより、推力の方向を反転させられるように構成したことを特徴とする請求項4記載の球形飛行機。
【請求項7】
地上回転移動中に凹所に嵌まった状態から自力で脱出するために、前記主翼の前記エルロンを動作させて回転モーメントを発生するように構成したことを特徴とする請求項4記載の球形飛行機。
【請求項8】
通常巡航飛行中に飛行効率と安定性を向上させるために、前記球殻体の一部を展開翼として展開できることを特徴とする請求項4記載の球形飛行機。
【請求項9】
遠隔操縦、自律行動が可能な無人機であることを特徴とする請求項1、3乃至8のいずれか1つに記載の球形飛行機。
【図2】


【図4】
【図5】
【図6】
【図7】
【図8】
【図1】
【図3】
【図9】
【図4】
【図5】
【図6】
【図7】
【図8】
【図1】
【図3】
【図9】
【公開番号】特開2010−52713(P2010−52713A)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【公開請求】
【出願番号】特願2009−52244(P2009−52244)
【出願日】平成21年3月5日(2009.3.5)
【出願人】(390014306)防衛省技術研究本部長 (169)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願番号】特願2009−52244(P2009−52244)
【出願日】平成21年3月5日(2009.3.5)
【出願人】(390014306)防衛省技術研究本部長 (169)
[ Back to top ]