
球状体搭載装置、球状体搭載方法、球状体搭載済基板および電子部品搭載済基板
【課題】製造コストの増加を抑えつつ球状体を搭載する搭載処理の効率を向上させる。
【解決手段】半田ボール300を保持する吸着ヘッド2と、吸着ヘッド2を支持する支持部3と、載置部11に載置された基板400に対して近接および離反する上下方向に沿って支持部3を移動させる移動機構4とを備えて、半田ボール300を基板400に搭載する搭載処理を実行可能に構成され、搭載処理の実行時において吸着ヘッド2が基板400に近接したときの吸着ヘッド2の移動速度を減速させる減速機構5を備え、減速機構5は、搭載処理の実行時において載置部11に当接すると共に上下方向に沿って移動可能に支持部3に連結された当接部51と、支持部3に対する当接部51の相対的な移動の向きと同じ向きに沿って支持部3に作用する抗力を生成するバネ61およびダンパ62で構成された抗力生成部52とを備えている。
【解決手段】半田ボール300を保持する吸着ヘッド2と、吸着ヘッド2を支持する支持部3と、載置部11に載置された基板400に対して近接および離反する上下方向に沿って支持部3を移動させる移動機構4とを備えて、半田ボール300を基板400に搭載する搭載処理を実行可能に構成され、搭載処理の実行時において吸着ヘッド2が基板400に近接したときの吸着ヘッド2の移動速度を減速させる減速機構5を備え、減速機構5は、搭載処理の実行時において載置部11に当接すると共に上下方向に沿って移動可能に支持部3に連結された当接部51と、支持部3に対する当接部51の相対的な移動の向きと同じ向きに沿って支持部3に作用する抗力を生成するバネ61およびダンパ62で構成された抗力生成部52とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、球状体を保持した保持ヘッドを移動させて球状体を搭載対象体に搭載する球状体搭載装置および球状体搭載方法、その球状体搭載装置または球状体搭載方法を用いて製造される球状体搭載済基板、並びにその球状体搭載済基板に電子部品が搭載された電子部品搭載済基板に関するものである。
【背景技術】
【0002】
この種の球状体搭載装置として、特開2011−40704号公報において出願人が開示した球状体搭載装置が知られている。この球状体搭載装置は、吸着ヘッド、搬送機構、および制御部などを備えて、半田ボールを基板の端子(搭載対象体)に搭載可能に構成されている。この球状体搭載装置では、搬送機構が、半田ボールを吸着している吸着ヘッドを基板の上方に搬送する。次いで、搬送機構は、吸着ヘッドによって吸着されている半田ボールの先端部が基板の端子に当接または近接する位置まで吸着ヘッドを降下させる。続いて、吸着ヘッドが吸着を解除する。これにより、基板の端子上に半田ボールが搭載される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−40704号公報(第6−11頁、第7−10図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、上記の球状体搭載装置には、改善すべき以下の課題がある。すなわち、この球状体搭載装置では、吸着ヘッドによって吸着されている半田ボールの先端部が基板の端子に当接または近接する位置まで搬送機構が吸着ヘッドを降下させ、その状態で吸着ヘッドが吸着を解除することで、端子上に半田ボールを搭載している。一方、この球状体搭載装置の搬送機構には、吸着ヘッドを支持する支持部に係合するボールネジ、およびこのボールネジを回転させるモーターで構成された上下動機構が組み込まれており、ボールネジがモーターによって回転させられることで、支持部によって支持されている吸着ヘッドを降下させている。また、この上下動機構では、吸着ヘッドによって吸着されている半田ボールの先端部が基板の端子に当接する直前まで、一定の速度で吸着ヘッドを降下させ、半田ボールの先端部が基板の端子に当接する直前でモーターを停止させて吸着ヘッドの降下を終了している。ここで、吸着ヘッドの降下速度が速いときには、モーターを停止させた際に慣性によって半田ボールが基板の端子に衝突し、その衝撃で半田ボールが位置ずれしたり、その衝撃で半田ボールが吸着ヘッドに食い付いたりするおそれがある。このため、この球状体搭載装置では、吸着ヘッドの降下速度を遅く設定して、このような事態の発生を防止している。このため、この球状体搭載装置には、降下速度が遅いことに起因して、処理効率の向上が困難であるという課題が存在する。この場合、例えば、途中の位置まで高速で降下させ、その後に低速で吸着ヘッドを降下させたり、降下速度を徐々に低下させたりする方法が考えられる。しかしながら、この方法を実現するには、吸着ヘッドの降下中において、半田ボールの大きさや基板の厚みなどに応じた適正な位置でモーターの回転速度を低下させるような高度な制御が必要となり、これに起因して製造コストが増加するという課題が存在する。
【0005】
本発明は、かかる改善すべき課題に鑑みてなされたものであり、製造コストの増加を抑えつつ球状体を搭載する搭載処理の効率を向上し得る球状体搭載装置および球状体搭載方法、その球状体搭載装置または球状体搭載方法を用いて製造される球状体搭載済基板、並びにその球状体搭載済基板を用いて製造される電子部品搭載済基板を提供することを主目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成すべく請求項1記載の球状体搭載装置は、球状体を保持する保持ヘッドと、当該保持ヘッドを支持する支持部と、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記支持部を移動させる移動機構とを備え、前記球状体を保持している前記保持ヘッドを移動させて当該球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載装置であって、前記搭載処理の実行時において前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる減速機構を備え、前記減速機構は、前記搭載処理の実行時において前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に当接すると共に前記第1の方向に沿って移動可能に前記支持部に連結された当接部と、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って当該支持部に作用する抗力を生成する抗力生成用バネおよびダンパの少なくとも一方で構成された抗力生成部とを備えている。
【0007】
また、請求項2記載の球状体搭載装置は、請求項1記載の球状体搭載装置において、前記支持部は、前記移動機構によって移動させられる第1支持体と、前記保持ヘッドが固定されると共に前記第1支持体に対して前記第1の方向に沿ってスライド可能に当該第1支持体に連結された第2支持体とを備えて構成され、前記当接部は、前記第2支持体に連結され、前記抗力生成部は、前記第2支持体に作用する抗力を生成する。
【0008】
また、請求項3記載の球状体搭載装置は、請求項2記載の球状体搭載装置において、前記第1支持体に一端部が取り付けられると共に前記第2支持体に他端部が取り付けられて前記第2支持体を牽引して前記搭載処理において前記球状体から前記搭載対象体に加わる当該球状体一つ当りの圧力を調整する圧力調整用バネを備えている。
【0009】
また、請求項4記載の球状体搭載装置は、請求項1から3のいずれかに記載の球状体搭載装置において、前記抗力生成部は、前記抗力生成用バネおよび前記ダンパの双方を備えて構成されている。
【0010】
また、請求項5記載の球状体搭載方法は、保持ヘッドに球状体を保持させ、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記保持ヘッドを支持している支持部を移動させ、前記球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載方法であって、前記第1の方向に沿って移動可能に前記支持部に連結された当接部と抗力生成用バネおよびダンパの少なくとも一方で構成されて抗力を生成する抗力生成部とを備えた減速機構を用いて前記搭載処理を実行し、その際に、前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に前記当接部を当接させ、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って前記抗力を当該支持部に作用させて前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる。
【0011】
また、請求項6記載の球状体搭載済基板は、請求項1から4のいずれかに記載の球状体搭載装置によって前記搭載対象体としての基板の端子に搭載された前記球状体が溶融されて当該端子に固着されている。
【0012】
また、請求項7記載の球状体搭載済基板は、請求項5記載の球状体搭載方法によって前記搭載対象体としての基板の端子に搭載された前記球状体が溶融されて当該端子に固着されている。
【0013】
さらに、請求項8記載の電子部品搭載済基板は、請求項6または7記載の球状体搭載済基板に固着された前記球状体の溶融体を介して接続された電子部品が当該球状体搭載済基板に搭載されている。
【発明の効果】
【0014】
請求項1記載の球状体搭載装置、および請求項5記載の球状体搭載方法では、第1の方向に沿って移動可能に支持部に連結された当接部と、支持部に対する当接部の相対的な移動の向きと同じ向きに沿って支持部に作用する抗力を生成する抗力生成用バネおよびダンパの少なくとも一方で構成された抗力生成部とを備えた減速機構を用いて、搭載処理の実行時において保持ヘッドが搭載対象体に近接したときの保持ヘッドの移動速度を減速させる。このため、この球状体搭載装置および球状体搭載方法によれば、移動機構による移動速度を速く設定することで、当接部が当接するまでの時間を短縮させることができると共に、抗力生成用バネおよびダンパの少なくとも一方を備えただけの簡易な構成の抗力生成部を有する減速機構を用いて、当接部が当接した後の移動速度を十分に減速させることができる。したがって、この球状体搭載装置および球状体搭載方法によれば、コストの増加を抑えつつ球状体を搭載する搭載処理の効率を十分に向上させることができる。
【0015】
また、請求項2記載の球状体搭載装置では、移動機構によって移動させられる第1支持体と保持ヘッドが固定されると共に第1支持体に対して第1の方向に沿ってスライド可能に第1支持体に連結された第2支持体とを備えて支持部が構成され、当接部が第2支持体に連結され、抗力生成部が第2支持体に作用する抗力を生成する。したがって、この球状体搭載装置によれば、移動機構によって第1支持体に加えられる駆動力が第2支持体には加わらないため、移動速度を減速させるのに必要なばね定数や粘性係数を算出して、抗力生成部に組み込む抗力生成用バネやダンパを選定する際に、移動機構の駆動力を考慮する必要がなくなるため、その分、選定作業を容易に行うことができる。
【0016】
また、請求項3記載の球状体搭載装置によれば、圧力調整用バネを備えたことにより、質量(重量)の異なる保持ヘッドを付け替えて搭載処理を行う際に、保持ヘッドの質量およびその保持ヘッドに吸着されている球状体の質量の合計の質量に応じて圧力調整用バネを交換する(具体的には、合計の質量が大きいほどばね定数が大きい圧力調整用バネを用い、合計の質量が小さいほどばね定数が小さい圧力調整用バネを用いる)ことで、球状体から搭載対象体に加わる球状体一つ当りの圧力を適正な圧力に調整することができる。このため、この球状体搭載装置によれば、保持ヘッドの種類に拘わらず、搭載対象体に加わる球状体一つ当りの圧力の調整によって各球状体を搭載対象体に対して確実に接触させることができる。
【0017】
また、請求項4記載の球状体搭載装置では、抗力生成用バネおよびダンパの双方を備えて抗力生成部が構成されている。このため、この球状体搭載装置によれば、抗力生成用バネが生成する抗力とダンパが生成する抗力との相乗効果により、吸着ヘッドの移動速度を短時間で減速させることができる結果、搭載処理の効率をさらに向上させることができる。
【0018】
また、請求項6および7記載の球状体搭載済基板では、上記の球状体搭載装置または上記の球状体搭載方法によって基板の端子上に搭載した球状体が溶融されて端子に固着されている。このため、この球状体搭載済基板では、基板における各端子上の正確な位置に球状体が過不足なく搭載される結果、球状体の溶融によって全ての端子上に球状体の溶融体が確実に固着される。
【0019】
また、請求項8記載の電子部品搭載済基板では、上記の球状体搭載済基板に固着された球状体の溶融体を介して電子部品の端子が球状体搭載済基板の端子に接続されている。この場合、上記の球状体搭載済基板では、全ての端子上に球状体の溶融体が確実に固着されている。このため、この電子部品実装済基板によれば、全ての電子部品の端子が球状体の溶融体を介して確実に基板の端子に接続される。
【図面の簡単な説明】
【0020】
【図1】半田ボール搭載装置1の構成を示す構成図である。
【図2】吸着ヘッド2の構成を示す断面図である。
【図3】吸着ヘッド2、支持部3、移動機構4および減速機構5の構成を示す構成図である。
【図4】供給部6およびマスク7の構成を示す断面図である。
【図5】吸着ヘッド2の底板22およびマスク7の構成を示す断面図である。
【図6】半田ボール搭載装置1の動作を説明する第1の説明図である。
【図7】半田ボール搭載装置1の動作を説明する第2の説明図である。
【図8】半田ボール搭載装置1の動作を説明する第3の説明図である。
【図9】半田ボール搭載装置1の動作を説明する第4の説明図である。
【図10】半田ボール搭載装置1の動作を説明する第5の説明図である。
【図11】半田搭載済基板600の構成を示す断面図である。
【図12】電子部品搭載済基板700の構成を示す断面図である。
【図13】半田ボール搭載装置101の構成を示す構成図である。
【図14】半田ボール搭載装置201の動作を説明する説明図である。
【発明を実施するための形態】
【0021】
以下、本発明に係る球状体搭載装置、球状体搭載方法、球状体搭載済基板および電子部品搭載済基板の実施の形態について、添付図面を参照して説明する。
【0022】
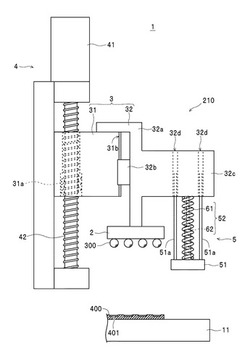
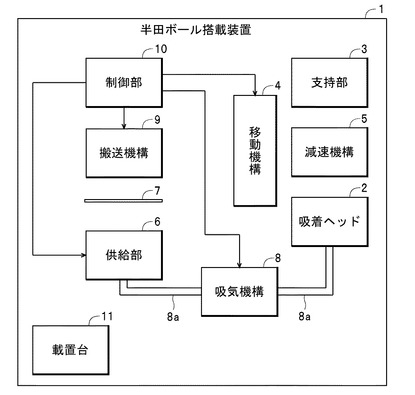
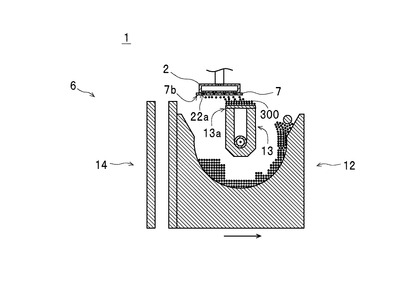
最初に、図1に示す半田ボール搭載装置1の構成について説明する。半田ボール搭載装置1は、球状体搭載装置の一例であって、同図に示すように、吸着ヘッド2、支持部3、移動機構4、減速機構5、供給部6、マスク7、吸気機構8、搬送機構9、制御部10および載置部11を備えて、球状体搭載方法に従い、球状体の一例としての微小な球状体である半田ボール(マイクロボール)300(図3〜図5参照)を搭載対象体としての基板400の端子401上(図3参照)に搭載(載置)する搭載処理を実行可能に構成されている。
【0023】
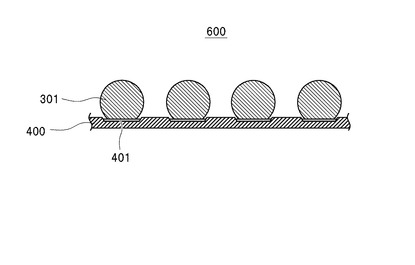
この場合、半田ボール300は、直径L1(図5参照)が80μm程度の球状に構成されている。また、半田ボール300は、図11に示すように、半田ボール搭載装置1によって基板400の各端子401上にそれぞれ搭載された後に加熱溶融されて、半球状(同図に示す半田301)となった状態で各端子401上に固着されてボールグリッドアレイ(BGA)を構成し、これによって半田搭載済基板(球状体搭載済基板)600が製造される。また、図12に示すように、このようにして製造された半田搭載済基板600には、集積回路等の電子部品701が搭載され、その電子部品701における図外の端子が半田搭載済基板600の端子401上に固着された半田ボール300(半田301)を介して端子401に接続され、これによって電子部品搭載済基板700が製造される。
【0024】
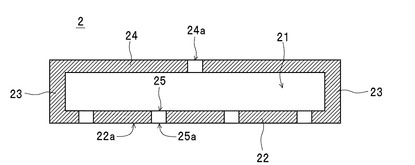
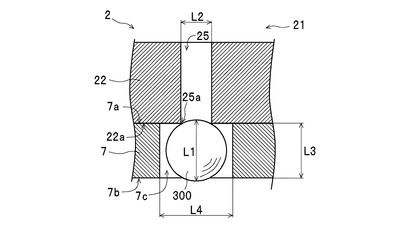
吸着ヘッド2は、保持ヘッドの一例であって、図2に示すように、一例として、底板22、側板23および天板24を備えて、内部に空隙21が形成された箱状に構成されている。また、図2,5に示すように、吸着ヘッド2の底板22には、底板22の外面(吸着面として機能する面であって、以下「吸着面22a」ともいう)に開口すると共に空隙21と連通する吸気孔25が、底板22の厚み方向に沿って複数(両図では、そのうちの一部のみを図示している)形成されている。なお、吸着面22aにおける吸気孔25の開口部を以下、「吸気口25a」ともいう。
【0025】
この場合、図5に示すように、吸気孔25(つまり、吸気口25a)の直径L2は、半田ボール300の直径L1(この例では、80μm)よりも短い40μm程度に規定されている。また、図2に示すように、吸着ヘッド2の天板24には、空隙21内の空気を排気するための排気孔24aが形成されている。この吸着ヘッド2では、空隙21内の空気の排気によって空隙21内が負圧状態となり、それに伴って吸気口25aからの吸気が行われることにより、吸着ヘッド2の吸着面22aにおける吸気口25aの縁部に半田ボール300を吸着して保持することが可能となっている(図5参照)。
【0026】
支持部3は、図3に示すように、第1支持体31および第2支持体32を備え、吸着ヘッド2を支持可能に構成されている。
【0027】
第1支持体31は、図3に示すように、後述する移動機構4のボールねじ42に係合する係合部31aを備え、ボールねじ42の回転に伴って上下方向(搭載対象体としての基板400の端子401に対して近接および離反する第1の方向)に移動させられる。また、同図に示すように、第1支持体31における第2支持体32に対向する部位側の側面には、後述する第2支持体32の連結部32bが係合する係合溝31bが上下方向に沿って形成されている。
【0028】
第2支持体32は、図3に示すように、本体部32a、連結部32bおよび取付部32cを備えて構成されている。本体部32aは、同図に示すように、L字型(逆L字型)に形成され、長尺部分の先端部(同図における下端部)に吸着ヘッド2を固定可能に構成されている。連結部32bは、第1支持体31側に突出するように本体部32aに配設されている。また、連結部32bは、第1支持体31に形成されている係合溝31bに係合して、係合溝31bに沿った(つまり、上下方向に沿った)スライドが可能となっている。
【0029】
取付部32cは、減速機構5が取り付けられる部位であって、図3に示すように、連結部32bとは逆側(第1支持体31から離反する向き)に突出するように本体部32aに配設されている。また、取付部32cには、後述する減速機構5のガイドロッド51aを挿通させるガイド孔32dが形成されている。なお、以下の説明において、吸着ヘッド2、支持部3の第2支持体32、および吸着ヘッド2によって吸着される各半田ボール300を合わせて「移動体210」ともいう。
【0030】
移動機構4は、図3に示すように、モータ41およびボールねじ42を備えて構成されている。モータ41は、制御部10の制御に従ってボールねじ42を回転させることにより、ボールねじ42に係合している支持部3の第1支持体31を上下方向に移動させる。この場合、移動機構4は、搭載処理の実行時において、第1支持体31を一定の移動速度V0で下向きに移動させる。
【0031】
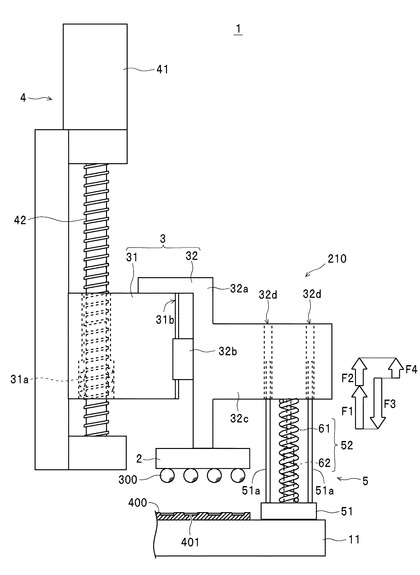
減速機構5は、搭載処理の実行時において、搭載対象体としての基板400の端子401に吸着ヘッド2が近接したときの吸着ヘッド2の移動速度を減速させる機能を有している。具体的には、減速機構5は、図3に示すように、当接部51および抗力生成部52を備えて構成されている。
【0032】
当接部51は、図3に示すように、上部に取り付けられているガイドロッド51aが第2支持体32の取付部32cに形成されているガイド孔32dに挿通されることにより、上下方向(第1の方向)沿って移動可能に取付部32cに連結されている。また、当接部51は、搭載処理の実行時において吸着ヘッド2によって保持されている半田ボール300が端子401に当接する前に、基板400が載置される載置部11(搭載対象体および載置部の少なくとも一方の一例)に当接するように、初期状態(載置部11に当接していない状態:同図参照)において吸着ヘッド2よりも下方に位置するように配置されている。
【0033】
抗力生成部52は、図3に示すように、バネ(抗力生成用バネ)61およびダンパ62を備えて構成されている。バネ61は、一例として、圧縮コイルバネ(押しバネ)で構成され、同図に示すように、第2支持体32の取付部32cと当接部51との間に配設されている。このバネ61は、第2支持体32に対する当接部51の相対的な移動の向きと同じ向きに沿って第2支持体32に作用する抗力を生成する機能を有している。具体的には、当接部51が取付部32cに近接する向きに移動しようとするときには、その向きと同じ向き(当接部51と取付部32cとを離反させる向き)に沿って第2支持体32に作用する抗力を生成する。この場合、上記した初期状態からの当接部51の移動量、すなわちバネ61の変位量をxとし、バネ61のばね定数をkとすると、バネ61が生成する抗力F1は、次の式(1)で表される。
F1=k・x ・・・式(1)
つまり、バネ61が生成する抗力F1は、当接部51の変位量xに比例する。
【0034】
ダンパ62は、一例として、油圧ダンパで構成され、図3に示すように、第2支持体32の取付部32cと当接部51との間に配設されている。このダンパ62は、第2支持体32に対する当接部51の相対的な移動の向きと同じ向きに沿って第2支持体32に作用する抗力を生成する機能を有している。具体的には、当接部51が取付部32cに近接する向きに移動しようとするときには、その向きと同じ向き(当接部51と取付部32cとを離反させる向き)に沿って第2支持体32に作用する抗力を生成する。この場合、ダンパ62内のオイルの粘性係数をDとし、第2支持体32に対する当接部51の相対的な移動速度(当接部51が載置部11に当接して停止している状態における移動体210の移動速度に相当する)をV1とすると、ダンパ62が生成する抗力F2は、次の式(2)で表される。
F2=D・V1・・・式(2)
つまり、ダンパ62が生成する抗力F2は、当接部51の移動速度V1に比例する。
【0035】
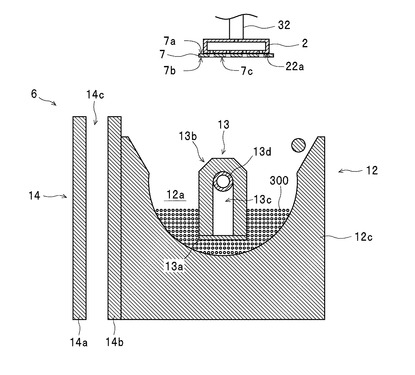
供給部6は、図4に示すように、収容容器12、吸着保持部13、および吸引部14を備えて吸着ヘッド2に対して半田ボール300を供給可能に構成されている。収容容器12は、容器本体12cと、容器本体12cの両側部に配設された2枚の側壁(図示せず)とを備えて、収容部12a内に半田ボール300を収容可能に構成されている。
【0036】
吸着保持部13は、図4に示すように、基端部13b側から先端部13aに至る吸気経路13cが内部に形成されて、収容容器12の収容部12a内に収容されている半田ボール300をその先端部13aで吸着して保持可能に構成されている。また、吸着保持部13は、基端部13bを中心として回動可能に配設されている。吸引部14は、2枚の区画壁14a,14bと収容容器12の側壁とによって形成される吸引経路14c(同図参照)を介して半田ボール300を吸引可能に構成されている。
【0037】
マスク7は、吸着ヘッド2による余剰な半田ボール300の吸着を規制する機能を有しており、供給部6の配設位置の上方の位置に配設されている。また、マスク7には、図5に示すように、吸着ヘッド2の吸着面22aと上面7aとが接触(または近接)している装着状態において吸着ヘッド2の吸気口25aに対向する位置に挿通孔7cが形成されている。この場合、挿通孔7cの直径L4は、半田ボール300が通過可能な95μm程度に規定されている。また、同図に示すように、マスク7の厚みL3は、装着状態において吸気口25aの縁部に吸着された半田ボール300の先端部が下面(他面)17bからやや突出する75μm程度に規定されている。
【0038】
吸気機構8は、吸気管8a(図1参照)を介して、吸着ヘッド2の排気孔24a、供給部6における吸着保持部13の吸気経路13cに連通する吸気管13d、および供給部6における吸引部14の吸引経路14cに繋がれた吸気ポンプ(図示せず)を備えて構成されている。また、吸気機構8は、排気孔24aと吸気ポンプとの間、吸気管13dと吸気ポンプとの間、および吸引経路14cと吸気ポンプとの間(つまり、各吸気管8aの途中)にそれぞれ配設された電磁バルブ(図示せず)を備えて構成されている。この場合、吸気機構8は、各電磁バルブが制御部10の制御に従って作動することにより、吸着ヘッド2の空隙21内を負圧状態とすることによる吸気口25aからの吸気、吸着保持部13における吸気経路13cからの吸気、および吸引部14における吸引経路14cからの吸気を個別に行うことが可能となっている。
【0039】
搬送機構9は、制御部10の制御に従い、マスク7の配設位置(半田ボール300が供給される位置)の上方の位置と、基板400の配設位置の上方の位置との間で、吸着ヘッド2、支持部3、移動機構4および減速機構5を搬送する。制御部10は、半田ボール搭載装置1を構成する各部および各機構を制御する。載置部11は、基板400を載置可能に構成されている。
【0040】
次に、半田ボール搭載装置1を用いて半田ボール300を搭載対象体としての基板400の各端子401に搭載する方法(球状体搭載方法)について、図面を参照して説明する。なお、図3に示すように、基板400は、載置部11に載置されているものとする。
【0041】
この半田ボール搭載装置1では、開始操作がされたときに、制御部10が、搬送機構9および移動機構4を制御して吸着ヘッド2を搬送(移動)させ、図4に示すように、吸着ヘッド2の吸着面22aとマスク7の上面7aとを接触(近接)させる(装着状態とさせる)。
【0042】
次いで、制御部10は、吸気機構8の電磁バルブを制御して、吸着ヘッド2の排気孔24aからの吸気を開始させる。この際に、吸着ヘッド2の空隙21内が負圧状態となって吸気口25aからの吸気が開始される。また、制御部10は、吸気機構8の電磁バルブを制御して、吸着保持部13における吸気経路13cからの吸気、および吸引部14における吸引経路14cからの吸気を開始させる。
【0043】
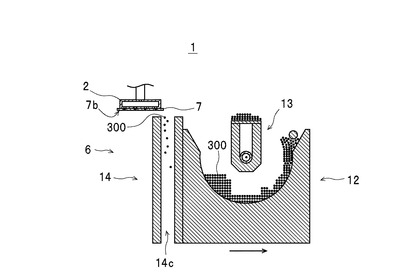
続いて、制御部10は、供給部6における図外の駆動機構を制御して、図4に示すように、吸気経路13cからの吸気に伴って先端部13aに半田ボール300を吸着している吸着保持部13を回動させ、次いで、図6に示すように、マスク7の下面7bに先端部13aを近接させた状態で供給部6を下面7bに沿って移動させる。
【0044】
この際に、先端部13aに保持されている半田ボール300が、吸着ヘッド2の吸引力によって吸着保持部13の吸引力に抗して吸着ヘッド2に引き寄せられて吸着ヘッド2に供給され、供給された半田ボール300の一部がマスク7の各挿通孔7cを通って吸着ヘッド2の吸着面22aにおける各吸気口25aの縁部に1つずつ吸着される。
【0045】
続いて、制御部10は、図外の駆動機構を制御して、図7に示すように、供給部6をマスク7の下面7bに沿ってさらに移動させる。この際に、同図に示すように、吸着保持部13に連続して吸引部14が移動させられて、吸引部14における吸引経路14cからの吸気によって余剰な半田ボール300が吸引されて除去される。
【0046】
次いで、制御部10は、搭載処理を実行する。この搭載処理では、制御部10は、移動機構4を制御して、吸着ヘッド2がマスク7から離反するように第1支持体31を上向きに移動させる。続いて、制御部10は、搬送機構9を制御して、図3に示すように、吸着ヘッド2が基板400の配設位置の上方に位置するように、吸着ヘッド2、支持部3、移動機構4および減速機構5を搬送させる。
上でお願い
【0047】
次いで、制御部10は、移動機構4を制御して、支持部3の第1支持体31を一定の移動速度V0で下向きに移動させる。この第1支持体31の移動に伴い、移動体210および減速機構5が第1支持体31と共に移動する。続いて、図8に示すように、吸着ヘッド2によって保持されている半田ボール300が基板400の端子401に当接するよりも前に、減速機構5の当接部51が載置部11に当接する。
【0048】
ここで、減速機構5の当接部51が載置部11に当接した後の支持部3、移動機構4および減速機構5の動作について説明する。この場合、支持部3の第1支持体31は、移動機構4によって移動速度V0で下向きに移動を継続する。
【0049】
また、載置部11に当接した当接部51は、第2支持体32の下向きの移動に伴って第2支持体32に対して相対的に上向きに移動する。また、当接部51の移動に応じて、バネ61が、上記した式(1)で表される抗力F1を生成し、ダンパ62が、上記した式(2)で表される抗力F2を生成する。
【0050】
一方、移動体210(吸着ヘッド2、支持部3の第2支持体32、および吸着ヘッド2によって吸着される各半田ボール300)の合計の質量をMとし、重力加速度をgとすると、移動体210に加わる重力F3は、次の式(3)で表される。
F3=M・g ・・・式(3)
【0051】
また、当接部51が載置部11に当接した後には、上記した抗力F1および抗力F2が移動体210に加わる。このため、当接部51が載置部11に当接した後に移動体210に加わる力F4の合計は、各力F1〜F4の向きを考慮すると次の式(4)で表される(図8参照)。
F4=F3−F1−F2 ・・・式(4)
なお、式(4)では、ガイドロッド51aとガイド孔32dの周壁との間の摩擦を無視している。
【0052】
また、運動の第2法則から、移動体210に加わる力F4によって質量Mの移動体210に生じる加速度aは、次の式(5)で表される。
M・a=F4 ・・・式(5)
上記した式(4)に式(1)〜式(3)、式(5)を代入して変形すると次の式(6)を得る。
a=g−k・x/M−D・V/M ・・・式(6)
式(6)から、M、k、Dを適宜の値に設定することで、加速度aを負の値(a<0)とすることができることが理解される。
【0053】
また、当接部51が載置部11に当接する以前における移動体210の移動速度V0(移動機構4が第1支持体31を下向きに移動させる移動速度)と、当接部51が載置部11に当接した後の移動体210の移動速度V1の関係は、次の式(7)で表される。
V1=V0+at ・・・式(7)
【0054】
この半田ボール搭載装置1では、移動体210の質量Mに応じて、上記した加速度aが負の値となるようなバネ61およびダンパ62を用いて抗力生成部52が構成されている。このため、この半田ボール搭載装置1では、当接部51が載置部11に当接した後における移動体210の移動速度V1が、それ以前の移動速度V0よりも減少(減速)することが上記の式(7)から理解される。
【0055】
次いで、制御部10は、図9に示すように、第1支持体31が予め決められた位置まで移動した時点で、移動機構4を制御して第1支持体31の移動を停止させる。この場合、移動機構4によって移動させられている第1支持体31は、当接部51が載置部11に当接した後においても、移動体210の移動速度V1よりも速い移動速度V0で移動するため、同図に示すように、この時点では、第1支持体31の上端部と第2支持体32における本体部32aの短尺部分とが離間している。
【0056】
続いて、移動体210が、抗力F1,F2に抗してさらに下方に移動したときには、吸着ヘッド2によって吸着されている半田ボール300の先端部が、基板400の端子401に接触する。また、図10に示すように、停止している第1支持体31の上部に第2支持体32における本体部32aの短尺部分が当接して、移動体210の移動が停止する。
【0057】
続いて、制御部10は、吸気機構8の電磁バルブを制御して、吸着ヘッド2における吸気口25aからの吸気を停止させる。この際に、吸着ヘッド2による吸着が解除されて、半田ボール300が基板400における端子401上に搭載される。次いで、制御部10は、移動機構4を制御して、第1支持体31を上方に向けて移動させた後に、搬送機構9を制御して吸着ヘッド2、支持部3、移動機構4および減速機構5を初期位置に搬送させる。以上により、基板400への半田ボール300の搭載が完了する。
【0058】
この場合、この半田ボール搭載装置1では、上記したように、当接部51が載置部11に当接した後の、つまり、吸着ヘッド2が基板400に近接したときの、移動体210の移動速度V1が十分に減速されている。このため、この半田ボール搭載装置1では、半田ボール300の先端部が、端子401に衝突して位置ずれしたり、衝突の際の衝撃で半田ボール300が吸着ヘッド2に食い付いたりする事態が確実に防止される。したがって、この半田ボール搭載装置1では、基板400における各端子401上の正確な位置に半田ボール300を過不足なく搭載することが可能となっている。
【0059】
また、この半田ボール搭載装置1では、移動機構4による移動速度V0を速く設定することで、当接部51が載置部11に当接するまでの時間が短縮されて、これによって搭載処理の効率を十分に向上させることが可能となっている。さらに、この半田ボール搭載装置1では、吸着ヘッド2の移動中においてモータ41の回転速度を低下させるような高度な制御を行うことなく、バネ61およびダンパ62を備えただけの簡易な構成の抗力生成部52を有する減速機構5を用いて搭載処理の効率の向上を実現することが可能となっている。
【0060】
続いて、半田ボール300の搭載が完了した基板400は、図外の取り出し装置によって取り出されて、図外の搭載状態検査装置に搬送され、搭載状態検査装置によって半田ボール300が過不足なく搭載されているか否かの搭載状態検査が行われる。この場合、搭載状態検査において不良と判別された基板400は、不良品のストック場所に搬送される。
【0061】
また、搭載状態検査において良好と判別された基板400は、図外のリフロー処理装置に搬送される。リフロー処理装置では、基板400に対してリフロー処理(溶融処理)が行われ、これにより、図11に示すように、基板400の端子401に搭載された各半田ボール300が溶融されて半球状(同図に示す半田301:溶融体の一例)となった状態で、基板400の端子401上に固着する。また、固着された半田301によって基板400上にボールグリッドアレイ(BGA)が構成される。以上により、同図に示すように、半田搭載済基板(球状体搭載済基板)600が製造される。
【0062】
この場合、半田ボール搭載装置1を用いて半田ボール300を搭載したことで、上記したように、基板400における各端子401上の正確な位置に半田ボール300が過不足なく搭載されている。このため、この半田搭載済基板600では、半田ボール300の溶融によって全ての端子401上に半田ボール300の溶融体(半田301)が確実に固着される。
【0063】
次いで、半田搭載済基板600は、図外の電子部品搭載装置に搬送され、続いて、電子部品搭載装置によって半田搭載済基板600に電子部品701が搭載される。次いで、例えばリフロー処理により、半田搭載済基板600における基板400の端子401上に固着された半田ボール300(半田301)が溶融されることで、搭載された電子部品701における図外の端子が、溶融された半田ボール300(半田301)を介して基板400の端子401に接続される。これにより、図12に示すように、電子部品搭載済基板700が製造される。この場合、上記したように、この半田搭載済基板600では、全ての端子401上に半田301が確実に固着されている。このため、この電子部品搭載済基板700では、電子部品701の端子と端子401とが電気的に確実に接続されている。
【0064】
このように、この半田ボール搭載装置1および球状体搭載方法では、上下方向に沿って移動可能に支持部3に連結された当接部51と、支持部3に対する当接部51の相対的な移動の向きと同じ向きに沿って支持部3に作用する抗力F1,F2を生成するバネ61およびダンパ62で構成された抗力生成部52とを備えた減速機構5を用いて、搭載処理の実行時において吸着ヘッド2が基板400に近接したときの吸着ヘッド2の移動速度V1を減速させる。このため、この半田ボール搭載装置1および球状体搭載方法によれば、移動機構4による第1支持体31の移動速度V0を速く設定することで、当接部51が載置部11に当接するまでの時間を短縮させることができると共に、バネ61およびダンパ62を備えただけの簡易な構成の抗力生成部52を有する減速機構5を用いて、当接部51が載置部11に当接した後の移動速度V1を十分に減速させることができる。したがって、この半田ボール搭載装置1および球状体搭載方法によれば、コストの増加を抑えつつ半田ボール300を搭載する搭載処理の効率を十分に向上させることができる。
【0065】
また、この半田ボール搭載装置1および球状体搭載方法では、第1支持体31と上下方向に沿ってスライド可能に第1支持体31に連結された第2支持体32とを備えた支持部3、第2支持体32に連結された当接部51、および第2支持体32に作用する抗力F1,F2を生成する抗力生成部52を用いて吸着ヘッド2の移動速度V1を減速させる。したがって、この半田ボール搭載装置1および球状体搭載方法によれば、移動機構4によって第1支持体31に加えられる駆動力が第2支持体32には加わらないため、移動速度V1を減速させるのに必要なばね定数kや粘性係数Dを算出して、抗力生成部52に組み込むバネ61やダンパ62を選定する際に、移動機構4の駆動力を考慮する必要がなくなるため、その分、選定作業を容易に行うことができる。
【0066】
また、この半田ボール搭載装置1および球状体搭載方法では、バネ61およびダンパ62の双方を備えた抗力生成部52を用いている。このため、この半田ボール搭載装置1および球状体搭載方法によれば、バネ61が生成する抗力F1とダンパ62が生成する抗力F2との相乗効果により、移動体210の移動速度V1を短時間で減速させることができる結果、搭載処理の効率をさらに向上させることができる。
【0067】
また、この半田搭載済基板600では、上記の半田ボール搭載装置1を用いて上記の球状体搭載方法によって基板400の端子401上に搭載した半田ボール300が溶融されて端子401に固着されている。このため、この半田搭載済基板600では、基板400における各端子401上の正確な位置に半田ボール300が過不足なく搭載されている。このため、この半田搭載済基板600では、半田ボール300の溶融によって全ての端子401上に半田ボール300の溶融体(半田301)が確実に固着される。
【0068】
また、この電子部品搭載済基板700では、上記の半田搭載済基板600に固着された半田301を介して電子部品701の端子が半田搭載済基板600の端子401に接続されている。この場合、上記の半田搭載済基板600では、全ての各端子401上に半田301が確実に固着されている。このため、この電子部品搭載済基板700によれば、電子部品701における全ての端子と端子401とが半田301を介して電気的に確実に接続される。
【0069】
なお、球状体搭載装置および球状体搭載方法は、上記の構成および方法に限定されない。例えば、上記した半田ボール搭載装置1に代えて、図13に示す半田ボール搭載装置101、およびこの半田ボール搭載装置101を用いた球状体搭載方法を採用することもできる。なお、以下の説明において、上記した半田ボール搭載装置1と同じ構成要素については、同じ符号を付して、重複する説明を省略する。
【0070】
この半田ボール搭載装置101では、図13に示すように、バネ(圧力調整用)33を備えて支持部3が構成されている。この場合、バネ33は、引張りコイルばね(引きバネ)で構成され、一端部(上端部)が第1支持体31に固定され、他端部(下端部)が第2支持体32の本体部32aに配設された突起部32eに固定されている。このバネ33は、第1支持体31側から第2支持体32を上向きに牽引することにより、搭載処理において半田ボール300を介して搭載対象体としての基板400の端子401に加わる半田ボール300一つ当りの圧力を調整する機能を有している。
【0071】
この半田ボール搭載装置101によれば、圧力調整用のバネ33を備えたことにより、質量(重量)の異なる吸着ヘッド2を付け替えて搭載処理を行う際に、吸着ヘッド2の質量およびその吸着ヘッド2に吸着されている半田ボール300の質量の合計の質量に応じてバネ33を交換する(具体的には、合計の質量が大きいほどばね定数が大きいバネ33を用い、合計の質量が小さいほどばね定数が小さいバネ33を用いる)ことで、半田ボール300から端子401に加わる半田ボール300一つ当りの圧力を適正な圧力に調整することができる。このため、この半田ボール搭載装置101によれば、吸着ヘッド2の種類に拘わらず、端子401に加わる半田ボール300一つ当りの圧力の調整によって各半田ボール300を端子401に対して確実に接触させることができる。
【0072】
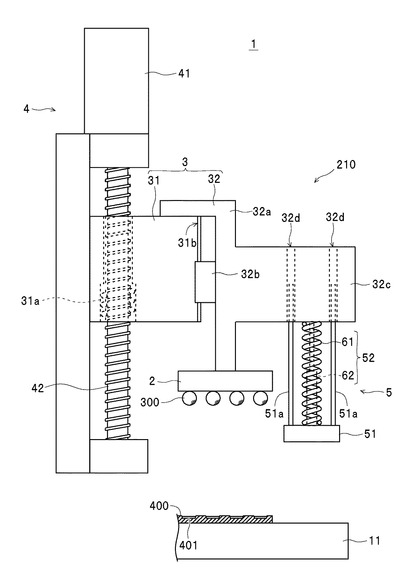
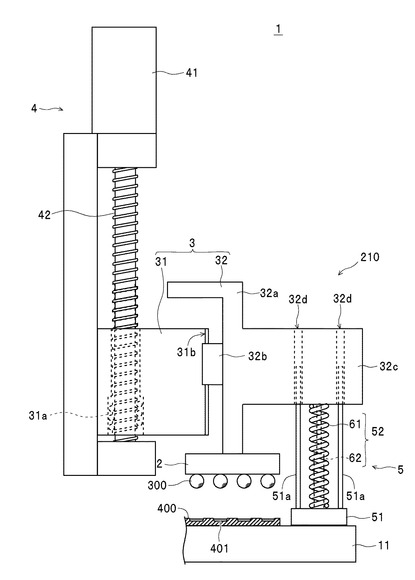
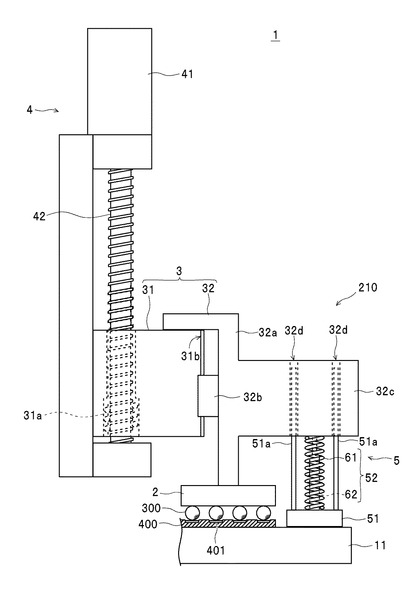
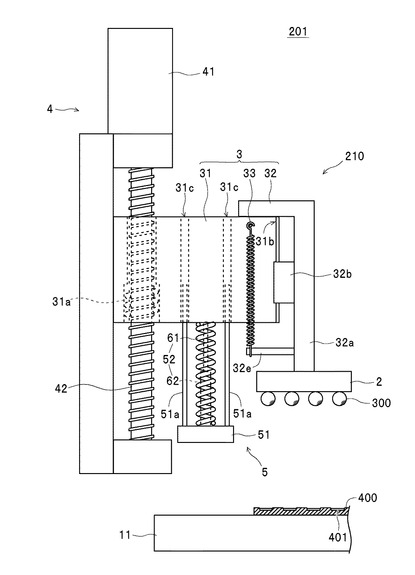
また、図14に示す半田ボール搭載装置201、およびこの半田ボール搭載装置101を用いた球状体搭載方法を採用することもできる。なお、以下の説明において、上記した半田ボール搭載装置1,101と同じ構成要素については、同じ符号を付して、重複する説明を省略する。
【0073】
この半田ボール搭載装置201では、図14に示すように、減速機構5が第1支持体31に配設されている。具体的には、この半田ボール搭載装置201では、減速機構5の当接部51に取り付けられているガイドロッド51aが第1支持体31に形成されているガイド孔31cに挿通されることにより、上下方向(第1の方向)沿って移動可能に第1支持体31に連結されている。
【0074】
また、この半田ボール搭載装置201では、図14に示すように、減速機構5の抗力生成部52を構成するバネ61およびダンパ62が、第1支持体31と当接部51との間にそれぞれ配設され、第1支持体31に対する当接部51の相対的な移動の向きと同じ向きに沿って第1支持体31に作用する抗力F1,F2を生成するバネ61およびダンパ62で構成された抗力生成部52とを備えた減速機構5を用いて、搭載処理の実行時において吸着ヘッド2が基板400に近接したときの吸着ヘッド2の移動速度V1を減速させる。
【0075】
また、この半田ボール搭載装置201では、移動機構4のモータ41が、搭載処理において、一定のトルクで回転して一定の力で第1支持体31に対して下向きに力を加える。
【0076】
この半田ボール搭載装置201では、当接部51が載置部11に当接した後に、バネ61およびダンパ62にが生成する抗力F1,F2が当接部51および第1支持体31に作用し、これによって第1支持体31および移動体210の移動速度V1が減速される。したがって、この半田ボール搭載装置201においても、上記した半田ボール搭載装置1と同様の効果を実現することができる。
【0077】
また、第1支持体31と第2支持体32とを備えて第2支持体32が第1支持体31に対してスライド可能に構成されている例について上記したが、第2支持体32と第1支持体31とを一体に形成した構成を採用することもできる。また、抗力生成部52がバネ61およびダンパ62の双方を備えている例について上記したが、バネ61およびダンパ62のいずれか一方のみを備えた抗力生成部を採用することもできる。
【0078】
また、モータ41およびボールねじ42を備えて移動機構4を構成した例について上記したが、エアシリンダで移動機構4を構成することもできる。また、当接部51を載置部11に当接させる例について上記したが、載置部11に載置された基板400に当接部51を当接させることもできる。
【符号の説明】
【0079】
1 半田ボール搭載装置
2 吸着ヘッド
3 支持部
4 移動機構
5 減速機構
11 載置部
11a 載置面
51 当接部
51a ガイドロッド
31 第1支持体
31c ガイド孔
32 第2支持体
32d ガイド孔
33,61 バネ
52 抗力生成部
62 ダンパ
300 半田ボール
301 半田
400 基板
401 端子
600 半田搭載済基板
700 電子部品実装済基板
701 電子部品
F1,F2 抗力
V1 移動速度
x 変位量
【技術分野】
【0001】
本発明は、球状体を保持した保持ヘッドを移動させて球状体を搭載対象体に搭載する球状体搭載装置および球状体搭載方法、その球状体搭載装置または球状体搭載方法を用いて製造される球状体搭載済基板、並びにその球状体搭載済基板に電子部品が搭載された電子部品搭載済基板に関するものである。
【背景技術】
【0002】
この種の球状体搭載装置として、特開2011−40704号公報において出願人が開示した球状体搭載装置が知られている。この球状体搭載装置は、吸着ヘッド、搬送機構、および制御部などを備えて、半田ボールを基板の端子(搭載対象体)に搭載可能に構成されている。この球状体搭載装置では、搬送機構が、半田ボールを吸着している吸着ヘッドを基板の上方に搬送する。次いで、搬送機構は、吸着ヘッドによって吸着されている半田ボールの先端部が基板の端子に当接または近接する位置まで吸着ヘッドを降下させる。続いて、吸着ヘッドが吸着を解除する。これにより、基板の端子上に半田ボールが搭載される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−40704号公報(第6−11頁、第7−10図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、上記の球状体搭載装置には、改善すべき以下の課題がある。すなわち、この球状体搭載装置では、吸着ヘッドによって吸着されている半田ボールの先端部が基板の端子に当接または近接する位置まで搬送機構が吸着ヘッドを降下させ、その状態で吸着ヘッドが吸着を解除することで、端子上に半田ボールを搭載している。一方、この球状体搭載装置の搬送機構には、吸着ヘッドを支持する支持部に係合するボールネジ、およびこのボールネジを回転させるモーターで構成された上下動機構が組み込まれており、ボールネジがモーターによって回転させられることで、支持部によって支持されている吸着ヘッドを降下させている。また、この上下動機構では、吸着ヘッドによって吸着されている半田ボールの先端部が基板の端子に当接する直前まで、一定の速度で吸着ヘッドを降下させ、半田ボールの先端部が基板の端子に当接する直前でモーターを停止させて吸着ヘッドの降下を終了している。ここで、吸着ヘッドの降下速度が速いときには、モーターを停止させた際に慣性によって半田ボールが基板の端子に衝突し、その衝撃で半田ボールが位置ずれしたり、その衝撃で半田ボールが吸着ヘッドに食い付いたりするおそれがある。このため、この球状体搭載装置では、吸着ヘッドの降下速度を遅く設定して、このような事態の発生を防止している。このため、この球状体搭載装置には、降下速度が遅いことに起因して、処理効率の向上が困難であるという課題が存在する。この場合、例えば、途中の位置まで高速で降下させ、その後に低速で吸着ヘッドを降下させたり、降下速度を徐々に低下させたりする方法が考えられる。しかしながら、この方法を実現するには、吸着ヘッドの降下中において、半田ボールの大きさや基板の厚みなどに応じた適正な位置でモーターの回転速度を低下させるような高度な制御が必要となり、これに起因して製造コストが増加するという課題が存在する。
【0005】
本発明は、かかる改善すべき課題に鑑みてなされたものであり、製造コストの増加を抑えつつ球状体を搭載する搭載処理の効率を向上し得る球状体搭載装置および球状体搭載方法、その球状体搭載装置または球状体搭載方法を用いて製造される球状体搭載済基板、並びにその球状体搭載済基板を用いて製造される電子部品搭載済基板を提供することを主目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成すべく請求項1記載の球状体搭載装置は、球状体を保持する保持ヘッドと、当該保持ヘッドを支持する支持部と、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記支持部を移動させる移動機構とを備え、前記球状体を保持している前記保持ヘッドを移動させて当該球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載装置であって、前記搭載処理の実行時において前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる減速機構を備え、前記減速機構は、前記搭載処理の実行時において前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に当接すると共に前記第1の方向に沿って移動可能に前記支持部に連結された当接部と、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って当該支持部に作用する抗力を生成する抗力生成用バネおよびダンパの少なくとも一方で構成された抗力生成部とを備えている。
【0007】
また、請求項2記載の球状体搭載装置は、請求項1記載の球状体搭載装置において、前記支持部は、前記移動機構によって移動させられる第1支持体と、前記保持ヘッドが固定されると共に前記第1支持体に対して前記第1の方向に沿ってスライド可能に当該第1支持体に連結された第2支持体とを備えて構成され、前記当接部は、前記第2支持体に連結され、前記抗力生成部は、前記第2支持体に作用する抗力を生成する。
【0008】
また、請求項3記載の球状体搭載装置は、請求項2記載の球状体搭載装置において、前記第1支持体に一端部が取り付けられると共に前記第2支持体に他端部が取り付けられて前記第2支持体を牽引して前記搭載処理において前記球状体から前記搭載対象体に加わる当該球状体一つ当りの圧力を調整する圧力調整用バネを備えている。
【0009】
また、請求項4記載の球状体搭載装置は、請求項1から3のいずれかに記載の球状体搭載装置において、前記抗力生成部は、前記抗力生成用バネおよび前記ダンパの双方を備えて構成されている。
【0010】
また、請求項5記載の球状体搭載方法は、保持ヘッドに球状体を保持させ、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記保持ヘッドを支持している支持部を移動させ、前記球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載方法であって、前記第1の方向に沿って移動可能に前記支持部に連結された当接部と抗力生成用バネおよびダンパの少なくとも一方で構成されて抗力を生成する抗力生成部とを備えた減速機構を用いて前記搭載処理を実行し、その際に、前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に前記当接部を当接させ、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って前記抗力を当該支持部に作用させて前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる。
【0011】
また、請求項6記載の球状体搭載済基板は、請求項1から4のいずれかに記載の球状体搭載装置によって前記搭載対象体としての基板の端子に搭載された前記球状体が溶融されて当該端子に固着されている。
【0012】
また、請求項7記載の球状体搭載済基板は、請求項5記載の球状体搭載方法によって前記搭載対象体としての基板の端子に搭載された前記球状体が溶融されて当該端子に固着されている。
【0013】
さらに、請求項8記載の電子部品搭載済基板は、請求項6または7記載の球状体搭載済基板に固着された前記球状体の溶融体を介して接続された電子部品が当該球状体搭載済基板に搭載されている。
【発明の効果】
【0014】
請求項1記載の球状体搭載装置、および請求項5記載の球状体搭載方法では、第1の方向に沿って移動可能に支持部に連結された当接部と、支持部に対する当接部の相対的な移動の向きと同じ向きに沿って支持部に作用する抗力を生成する抗力生成用バネおよびダンパの少なくとも一方で構成された抗力生成部とを備えた減速機構を用いて、搭載処理の実行時において保持ヘッドが搭載対象体に近接したときの保持ヘッドの移動速度を減速させる。このため、この球状体搭載装置および球状体搭載方法によれば、移動機構による移動速度を速く設定することで、当接部が当接するまでの時間を短縮させることができると共に、抗力生成用バネおよびダンパの少なくとも一方を備えただけの簡易な構成の抗力生成部を有する減速機構を用いて、当接部が当接した後の移動速度を十分に減速させることができる。したがって、この球状体搭載装置および球状体搭載方法によれば、コストの増加を抑えつつ球状体を搭載する搭載処理の効率を十分に向上させることができる。
【0015】
また、請求項2記載の球状体搭載装置では、移動機構によって移動させられる第1支持体と保持ヘッドが固定されると共に第1支持体に対して第1の方向に沿ってスライド可能に第1支持体に連結された第2支持体とを備えて支持部が構成され、当接部が第2支持体に連結され、抗力生成部が第2支持体に作用する抗力を生成する。したがって、この球状体搭載装置によれば、移動機構によって第1支持体に加えられる駆動力が第2支持体には加わらないため、移動速度を減速させるのに必要なばね定数や粘性係数を算出して、抗力生成部に組み込む抗力生成用バネやダンパを選定する際に、移動機構の駆動力を考慮する必要がなくなるため、その分、選定作業を容易に行うことができる。
【0016】
また、請求項3記載の球状体搭載装置によれば、圧力調整用バネを備えたことにより、質量(重量)の異なる保持ヘッドを付け替えて搭載処理を行う際に、保持ヘッドの質量およびその保持ヘッドに吸着されている球状体の質量の合計の質量に応じて圧力調整用バネを交換する(具体的には、合計の質量が大きいほどばね定数が大きい圧力調整用バネを用い、合計の質量が小さいほどばね定数が小さい圧力調整用バネを用いる)ことで、球状体から搭載対象体に加わる球状体一つ当りの圧力を適正な圧力に調整することができる。このため、この球状体搭載装置によれば、保持ヘッドの種類に拘わらず、搭載対象体に加わる球状体一つ当りの圧力の調整によって各球状体を搭載対象体に対して確実に接触させることができる。
【0017】
また、請求項4記載の球状体搭載装置では、抗力生成用バネおよびダンパの双方を備えて抗力生成部が構成されている。このため、この球状体搭載装置によれば、抗力生成用バネが生成する抗力とダンパが生成する抗力との相乗効果により、吸着ヘッドの移動速度を短時間で減速させることができる結果、搭載処理の効率をさらに向上させることができる。
【0018】
また、請求項6および7記載の球状体搭載済基板では、上記の球状体搭載装置または上記の球状体搭載方法によって基板の端子上に搭載した球状体が溶融されて端子に固着されている。このため、この球状体搭載済基板では、基板における各端子上の正確な位置に球状体が過不足なく搭載される結果、球状体の溶融によって全ての端子上に球状体の溶融体が確実に固着される。
【0019】
また、請求項8記載の電子部品搭載済基板では、上記の球状体搭載済基板に固着された球状体の溶融体を介して電子部品の端子が球状体搭載済基板の端子に接続されている。この場合、上記の球状体搭載済基板では、全ての端子上に球状体の溶融体が確実に固着されている。このため、この電子部品実装済基板によれば、全ての電子部品の端子が球状体の溶融体を介して確実に基板の端子に接続される。
【図面の簡単な説明】
【0020】
【図1】半田ボール搭載装置1の構成を示す構成図である。
【図2】吸着ヘッド2の構成を示す断面図である。
【図3】吸着ヘッド2、支持部3、移動機構4および減速機構5の構成を示す構成図である。
【図4】供給部6およびマスク7の構成を示す断面図である。
【図5】吸着ヘッド2の底板22およびマスク7の構成を示す断面図である。
【図6】半田ボール搭載装置1の動作を説明する第1の説明図である。
【図7】半田ボール搭載装置1の動作を説明する第2の説明図である。
【図8】半田ボール搭載装置1の動作を説明する第3の説明図である。
【図9】半田ボール搭載装置1の動作を説明する第4の説明図である。
【図10】半田ボール搭載装置1の動作を説明する第5の説明図である。
【図11】半田搭載済基板600の構成を示す断面図である。
【図12】電子部品搭載済基板700の構成を示す断面図である。
【図13】半田ボール搭載装置101の構成を示す構成図である。
【図14】半田ボール搭載装置201の動作を説明する説明図である。
【発明を実施するための形態】
【0021】
以下、本発明に係る球状体搭載装置、球状体搭載方法、球状体搭載済基板および電子部品搭載済基板の実施の形態について、添付図面を参照して説明する。
【0022】
最初に、図1に示す半田ボール搭載装置1の構成について説明する。半田ボール搭載装置1は、球状体搭載装置の一例であって、同図に示すように、吸着ヘッド2、支持部3、移動機構4、減速機構5、供給部6、マスク7、吸気機構8、搬送機構9、制御部10および載置部11を備えて、球状体搭載方法に従い、球状体の一例としての微小な球状体である半田ボール(マイクロボール)300(図3〜図5参照)を搭載対象体としての基板400の端子401上(図3参照)に搭載(載置)する搭載処理を実行可能に構成されている。
【0023】
この場合、半田ボール300は、直径L1(図5参照)が80μm程度の球状に構成されている。また、半田ボール300は、図11に示すように、半田ボール搭載装置1によって基板400の各端子401上にそれぞれ搭載された後に加熱溶融されて、半球状(同図に示す半田301)となった状態で各端子401上に固着されてボールグリッドアレイ(BGA)を構成し、これによって半田搭載済基板(球状体搭載済基板)600が製造される。また、図12に示すように、このようにして製造された半田搭載済基板600には、集積回路等の電子部品701が搭載され、その電子部品701における図外の端子が半田搭載済基板600の端子401上に固着された半田ボール300(半田301)を介して端子401に接続され、これによって電子部品搭載済基板700が製造される。
【0024】
吸着ヘッド2は、保持ヘッドの一例であって、図2に示すように、一例として、底板22、側板23および天板24を備えて、内部に空隙21が形成された箱状に構成されている。また、図2,5に示すように、吸着ヘッド2の底板22には、底板22の外面(吸着面として機能する面であって、以下「吸着面22a」ともいう)に開口すると共に空隙21と連通する吸気孔25が、底板22の厚み方向に沿って複数(両図では、そのうちの一部のみを図示している)形成されている。なお、吸着面22aにおける吸気孔25の開口部を以下、「吸気口25a」ともいう。
【0025】
この場合、図5に示すように、吸気孔25(つまり、吸気口25a)の直径L2は、半田ボール300の直径L1(この例では、80μm)よりも短い40μm程度に規定されている。また、図2に示すように、吸着ヘッド2の天板24には、空隙21内の空気を排気するための排気孔24aが形成されている。この吸着ヘッド2では、空隙21内の空気の排気によって空隙21内が負圧状態となり、それに伴って吸気口25aからの吸気が行われることにより、吸着ヘッド2の吸着面22aにおける吸気口25aの縁部に半田ボール300を吸着して保持することが可能となっている(図5参照)。
【0026】
支持部3は、図3に示すように、第1支持体31および第2支持体32を備え、吸着ヘッド2を支持可能に構成されている。
【0027】
第1支持体31は、図3に示すように、後述する移動機構4のボールねじ42に係合する係合部31aを備え、ボールねじ42の回転に伴って上下方向(搭載対象体としての基板400の端子401に対して近接および離反する第1の方向)に移動させられる。また、同図に示すように、第1支持体31における第2支持体32に対向する部位側の側面には、後述する第2支持体32の連結部32bが係合する係合溝31bが上下方向に沿って形成されている。
【0028】
第2支持体32は、図3に示すように、本体部32a、連結部32bおよび取付部32cを備えて構成されている。本体部32aは、同図に示すように、L字型(逆L字型)に形成され、長尺部分の先端部(同図における下端部)に吸着ヘッド2を固定可能に構成されている。連結部32bは、第1支持体31側に突出するように本体部32aに配設されている。また、連結部32bは、第1支持体31に形成されている係合溝31bに係合して、係合溝31bに沿った(つまり、上下方向に沿った)スライドが可能となっている。
【0029】
取付部32cは、減速機構5が取り付けられる部位であって、図3に示すように、連結部32bとは逆側(第1支持体31から離反する向き)に突出するように本体部32aに配設されている。また、取付部32cには、後述する減速機構5のガイドロッド51aを挿通させるガイド孔32dが形成されている。なお、以下の説明において、吸着ヘッド2、支持部3の第2支持体32、および吸着ヘッド2によって吸着される各半田ボール300を合わせて「移動体210」ともいう。
【0030】
移動機構4は、図3に示すように、モータ41およびボールねじ42を備えて構成されている。モータ41は、制御部10の制御に従ってボールねじ42を回転させることにより、ボールねじ42に係合している支持部3の第1支持体31を上下方向に移動させる。この場合、移動機構4は、搭載処理の実行時において、第1支持体31を一定の移動速度V0で下向きに移動させる。
【0031】
減速機構5は、搭載処理の実行時において、搭載対象体としての基板400の端子401に吸着ヘッド2が近接したときの吸着ヘッド2の移動速度を減速させる機能を有している。具体的には、減速機構5は、図3に示すように、当接部51および抗力生成部52を備えて構成されている。
【0032】
当接部51は、図3に示すように、上部に取り付けられているガイドロッド51aが第2支持体32の取付部32cに形成されているガイド孔32dに挿通されることにより、上下方向(第1の方向)沿って移動可能に取付部32cに連結されている。また、当接部51は、搭載処理の実行時において吸着ヘッド2によって保持されている半田ボール300が端子401に当接する前に、基板400が載置される載置部11(搭載対象体および載置部の少なくとも一方の一例)に当接するように、初期状態(載置部11に当接していない状態:同図参照)において吸着ヘッド2よりも下方に位置するように配置されている。
【0033】
抗力生成部52は、図3に示すように、バネ(抗力生成用バネ)61およびダンパ62を備えて構成されている。バネ61は、一例として、圧縮コイルバネ(押しバネ)で構成され、同図に示すように、第2支持体32の取付部32cと当接部51との間に配設されている。このバネ61は、第2支持体32に対する当接部51の相対的な移動の向きと同じ向きに沿って第2支持体32に作用する抗力を生成する機能を有している。具体的には、当接部51が取付部32cに近接する向きに移動しようとするときには、その向きと同じ向き(当接部51と取付部32cとを離反させる向き)に沿って第2支持体32に作用する抗力を生成する。この場合、上記した初期状態からの当接部51の移動量、すなわちバネ61の変位量をxとし、バネ61のばね定数をkとすると、バネ61が生成する抗力F1は、次の式(1)で表される。
F1=k・x ・・・式(1)
つまり、バネ61が生成する抗力F1は、当接部51の変位量xに比例する。
【0034】
ダンパ62は、一例として、油圧ダンパで構成され、図3に示すように、第2支持体32の取付部32cと当接部51との間に配設されている。このダンパ62は、第2支持体32に対する当接部51の相対的な移動の向きと同じ向きに沿って第2支持体32に作用する抗力を生成する機能を有している。具体的には、当接部51が取付部32cに近接する向きに移動しようとするときには、その向きと同じ向き(当接部51と取付部32cとを離反させる向き)に沿って第2支持体32に作用する抗力を生成する。この場合、ダンパ62内のオイルの粘性係数をDとし、第2支持体32に対する当接部51の相対的な移動速度(当接部51が載置部11に当接して停止している状態における移動体210の移動速度に相当する)をV1とすると、ダンパ62が生成する抗力F2は、次の式(2)で表される。
F2=D・V1・・・式(2)
つまり、ダンパ62が生成する抗力F2は、当接部51の移動速度V1に比例する。
【0035】
供給部6は、図4に示すように、収容容器12、吸着保持部13、および吸引部14を備えて吸着ヘッド2に対して半田ボール300を供給可能に構成されている。収容容器12は、容器本体12cと、容器本体12cの両側部に配設された2枚の側壁(図示せず)とを備えて、収容部12a内に半田ボール300を収容可能に構成されている。
【0036】
吸着保持部13は、図4に示すように、基端部13b側から先端部13aに至る吸気経路13cが内部に形成されて、収容容器12の収容部12a内に収容されている半田ボール300をその先端部13aで吸着して保持可能に構成されている。また、吸着保持部13は、基端部13bを中心として回動可能に配設されている。吸引部14は、2枚の区画壁14a,14bと収容容器12の側壁とによって形成される吸引経路14c(同図参照)を介して半田ボール300を吸引可能に構成されている。
【0037】
マスク7は、吸着ヘッド2による余剰な半田ボール300の吸着を規制する機能を有しており、供給部6の配設位置の上方の位置に配設されている。また、マスク7には、図5に示すように、吸着ヘッド2の吸着面22aと上面7aとが接触(または近接)している装着状態において吸着ヘッド2の吸気口25aに対向する位置に挿通孔7cが形成されている。この場合、挿通孔7cの直径L4は、半田ボール300が通過可能な95μm程度に規定されている。また、同図に示すように、マスク7の厚みL3は、装着状態において吸気口25aの縁部に吸着された半田ボール300の先端部が下面(他面)17bからやや突出する75μm程度に規定されている。
【0038】
吸気機構8は、吸気管8a(図1参照)を介して、吸着ヘッド2の排気孔24a、供給部6における吸着保持部13の吸気経路13cに連通する吸気管13d、および供給部6における吸引部14の吸引経路14cに繋がれた吸気ポンプ(図示せず)を備えて構成されている。また、吸気機構8は、排気孔24aと吸気ポンプとの間、吸気管13dと吸気ポンプとの間、および吸引経路14cと吸気ポンプとの間(つまり、各吸気管8aの途中)にそれぞれ配設された電磁バルブ(図示せず)を備えて構成されている。この場合、吸気機構8は、各電磁バルブが制御部10の制御に従って作動することにより、吸着ヘッド2の空隙21内を負圧状態とすることによる吸気口25aからの吸気、吸着保持部13における吸気経路13cからの吸気、および吸引部14における吸引経路14cからの吸気を個別に行うことが可能となっている。
【0039】
搬送機構9は、制御部10の制御に従い、マスク7の配設位置(半田ボール300が供給される位置)の上方の位置と、基板400の配設位置の上方の位置との間で、吸着ヘッド2、支持部3、移動機構4および減速機構5を搬送する。制御部10は、半田ボール搭載装置1を構成する各部および各機構を制御する。載置部11は、基板400を載置可能に構成されている。
【0040】
次に、半田ボール搭載装置1を用いて半田ボール300を搭載対象体としての基板400の各端子401に搭載する方法(球状体搭載方法)について、図面を参照して説明する。なお、図3に示すように、基板400は、載置部11に載置されているものとする。
【0041】
この半田ボール搭載装置1では、開始操作がされたときに、制御部10が、搬送機構9および移動機構4を制御して吸着ヘッド2を搬送(移動)させ、図4に示すように、吸着ヘッド2の吸着面22aとマスク7の上面7aとを接触(近接)させる(装着状態とさせる)。
【0042】
次いで、制御部10は、吸気機構8の電磁バルブを制御して、吸着ヘッド2の排気孔24aからの吸気を開始させる。この際に、吸着ヘッド2の空隙21内が負圧状態となって吸気口25aからの吸気が開始される。また、制御部10は、吸気機構8の電磁バルブを制御して、吸着保持部13における吸気経路13cからの吸気、および吸引部14における吸引経路14cからの吸気を開始させる。
【0043】
続いて、制御部10は、供給部6における図外の駆動機構を制御して、図4に示すように、吸気経路13cからの吸気に伴って先端部13aに半田ボール300を吸着している吸着保持部13を回動させ、次いで、図6に示すように、マスク7の下面7bに先端部13aを近接させた状態で供給部6を下面7bに沿って移動させる。
【0044】
この際に、先端部13aに保持されている半田ボール300が、吸着ヘッド2の吸引力によって吸着保持部13の吸引力に抗して吸着ヘッド2に引き寄せられて吸着ヘッド2に供給され、供給された半田ボール300の一部がマスク7の各挿通孔7cを通って吸着ヘッド2の吸着面22aにおける各吸気口25aの縁部に1つずつ吸着される。
【0045】
続いて、制御部10は、図外の駆動機構を制御して、図7に示すように、供給部6をマスク7の下面7bに沿ってさらに移動させる。この際に、同図に示すように、吸着保持部13に連続して吸引部14が移動させられて、吸引部14における吸引経路14cからの吸気によって余剰な半田ボール300が吸引されて除去される。
【0046】
次いで、制御部10は、搭載処理を実行する。この搭載処理では、制御部10は、移動機構4を制御して、吸着ヘッド2がマスク7から離反するように第1支持体31を上向きに移動させる。続いて、制御部10は、搬送機構9を制御して、図3に示すように、吸着ヘッド2が基板400の配設位置の上方に位置するように、吸着ヘッド2、支持部3、移動機構4および減速機構5を搬送させる。
上でお願い
【0047】
次いで、制御部10は、移動機構4を制御して、支持部3の第1支持体31を一定の移動速度V0で下向きに移動させる。この第1支持体31の移動に伴い、移動体210および減速機構5が第1支持体31と共に移動する。続いて、図8に示すように、吸着ヘッド2によって保持されている半田ボール300が基板400の端子401に当接するよりも前に、減速機構5の当接部51が載置部11に当接する。
【0048】
ここで、減速機構5の当接部51が載置部11に当接した後の支持部3、移動機構4および減速機構5の動作について説明する。この場合、支持部3の第1支持体31は、移動機構4によって移動速度V0で下向きに移動を継続する。
【0049】
また、載置部11に当接した当接部51は、第2支持体32の下向きの移動に伴って第2支持体32に対して相対的に上向きに移動する。また、当接部51の移動に応じて、バネ61が、上記した式(1)で表される抗力F1を生成し、ダンパ62が、上記した式(2)で表される抗力F2を生成する。
【0050】
一方、移動体210(吸着ヘッド2、支持部3の第2支持体32、および吸着ヘッド2によって吸着される各半田ボール300)の合計の質量をMとし、重力加速度をgとすると、移動体210に加わる重力F3は、次の式(3)で表される。
F3=M・g ・・・式(3)
【0051】
また、当接部51が載置部11に当接した後には、上記した抗力F1および抗力F2が移動体210に加わる。このため、当接部51が載置部11に当接した後に移動体210に加わる力F4の合計は、各力F1〜F4の向きを考慮すると次の式(4)で表される(図8参照)。
F4=F3−F1−F2 ・・・式(4)
なお、式(4)では、ガイドロッド51aとガイド孔32dの周壁との間の摩擦を無視している。
【0052】
また、運動の第2法則から、移動体210に加わる力F4によって質量Mの移動体210に生じる加速度aは、次の式(5)で表される。
M・a=F4 ・・・式(5)
上記した式(4)に式(1)〜式(3)、式(5)を代入して変形すると次の式(6)を得る。
a=g−k・x/M−D・V/M ・・・式(6)
式(6)から、M、k、Dを適宜の値に設定することで、加速度aを負の値(a<0)とすることができることが理解される。
【0053】
また、当接部51が載置部11に当接する以前における移動体210の移動速度V0(移動機構4が第1支持体31を下向きに移動させる移動速度)と、当接部51が載置部11に当接した後の移動体210の移動速度V1の関係は、次の式(7)で表される。
V1=V0+at ・・・式(7)
【0054】
この半田ボール搭載装置1では、移動体210の質量Mに応じて、上記した加速度aが負の値となるようなバネ61およびダンパ62を用いて抗力生成部52が構成されている。このため、この半田ボール搭載装置1では、当接部51が載置部11に当接した後における移動体210の移動速度V1が、それ以前の移動速度V0よりも減少(減速)することが上記の式(7)から理解される。
【0055】
次いで、制御部10は、図9に示すように、第1支持体31が予め決められた位置まで移動した時点で、移動機構4を制御して第1支持体31の移動を停止させる。この場合、移動機構4によって移動させられている第1支持体31は、当接部51が載置部11に当接した後においても、移動体210の移動速度V1よりも速い移動速度V0で移動するため、同図に示すように、この時点では、第1支持体31の上端部と第2支持体32における本体部32aの短尺部分とが離間している。
【0056】
続いて、移動体210が、抗力F1,F2に抗してさらに下方に移動したときには、吸着ヘッド2によって吸着されている半田ボール300の先端部が、基板400の端子401に接触する。また、図10に示すように、停止している第1支持体31の上部に第2支持体32における本体部32aの短尺部分が当接して、移動体210の移動が停止する。
【0057】
続いて、制御部10は、吸気機構8の電磁バルブを制御して、吸着ヘッド2における吸気口25aからの吸気を停止させる。この際に、吸着ヘッド2による吸着が解除されて、半田ボール300が基板400における端子401上に搭載される。次いで、制御部10は、移動機構4を制御して、第1支持体31を上方に向けて移動させた後に、搬送機構9を制御して吸着ヘッド2、支持部3、移動機構4および減速機構5を初期位置に搬送させる。以上により、基板400への半田ボール300の搭載が完了する。
【0058】
この場合、この半田ボール搭載装置1では、上記したように、当接部51が載置部11に当接した後の、つまり、吸着ヘッド2が基板400に近接したときの、移動体210の移動速度V1が十分に減速されている。このため、この半田ボール搭載装置1では、半田ボール300の先端部が、端子401に衝突して位置ずれしたり、衝突の際の衝撃で半田ボール300が吸着ヘッド2に食い付いたりする事態が確実に防止される。したがって、この半田ボール搭載装置1では、基板400における各端子401上の正確な位置に半田ボール300を過不足なく搭載することが可能となっている。
【0059】
また、この半田ボール搭載装置1では、移動機構4による移動速度V0を速く設定することで、当接部51が載置部11に当接するまでの時間が短縮されて、これによって搭載処理の効率を十分に向上させることが可能となっている。さらに、この半田ボール搭載装置1では、吸着ヘッド2の移動中においてモータ41の回転速度を低下させるような高度な制御を行うことなく、バネ61およびダンパ62を備えただけの簡易な構成の抗力生成部52を有する減速機構5を用いて搭載処理の効率の向上を実現することが可能となっている。
【0060】
続いて、半田ボール300の搭載が完了した基板400は、図外の取り出し装置によって取り出されて、図外の搭載状態検査装置に搬送され、搭載状態検査装置によって半田ボール300が過不足なく搭載されているか否かの搭載状態検査が行われる。この場合、搭載状態検査において不良と判別された基板400は、不良品のストック場所に搬送される。
【0061】
また、搭載状態検査において良好と判別された基板400は、図外のリフロー処理装置に搬送される。リフロー処理装置では、基板400に対してリフロー処理(溶融処理)が行われ、これにより、図11に示すように、基板400の端子401に搭載された各半田ボール300が溶融されて半球状(同図に示す半田301:溶融体の一例)となった状態で、基板400の端子401上に固着する。また、固着された半田301によって基板400上にボールグリッドアレイ(BGA)が構成される。以上により、同図に示すように、半田搭載済基板(球状体搭載済基板)600が製造される。
【0062】
この場合、半田ボール搭載装置1を用いて半田ボール300を搭載したことで、上記したように、基板400における各端子401上の正確な位置に半田ボール300が過不足なく搭載されている。このため、この半田搭載済基板600では、半田ボール300の溶融によって全ての端子401上に半田ボール300の溶融体(半田301)が確実に固着される。
【0063】
次いで、半田搭載済基板600は、図外の電子部品搭載装置に搬送され、続いて、電子部品搭載装置によって半田搭載済基板600に電子部品701が搭載される。次いで、例えばリフロー処理により、半田搭載済基板600における基板400の端子401上に固着された半田ボール300(半田301)が溶融されることで、搭載された電子部品701における図外の端子が、溶融された半田ボール300(半田301)を介して基板400の端子401に接続される。これにより、図12に示すように、電子部品搭載済基板700が製造される。この場合、上記したように、この半田搭載済基板600では、全ての端子401上に半田301が確実に固着されている。このため、この電子部品搭載済基板700では、電子部品701の端子と端子401とが電気的に確実に接続されている。
【0064】
このように、この半田ボール搭載装置1および球状体搭載方法では、上下方向に沿って移動可能に支持部3に連結された当接部51と、支持部3に対する当接部51の相対的な移動の向きと同じ向きに沿って支持部3に作用する抗力F1,F2を生成するバネ61およびダンパ62で構成された抗力生成部52とを備えた減速機構5を用いて、搭載処理の実行時において吸着ヘッド2が基板400に近接したときの吸着ヘッド2の移動速度V1を減速させる。このため、この半田ボール搭載装置1および球状体搭載方法によれば、移動機構4による第1支持体31の移動速度V0を速く設定することで、当接部51が載置部11に当接するまでの時間を短縮させることができると共に、バネ61およびダンパ62を備えただけの簡易な構成の抗力生成部52を有する減速機構5を用いて、当接部51が載置部11に当接した後の移動速度V1を十分に減速させることができる。したがって、この半田ボール搭載装置1および球状体搭載方法によれば、コストの増加を抑えつつ半田ボール300を搭載する搭載処理の効率を十分に向上させることができる。
【0065】
また、この半田ボール搭載装置1および球状体搭載方法では、第1支持体31と上下方向に沿ってスライド可能に第1支持体31に連結された第2支持体32とを備えた支持部3、第2支持体32に連結された当接部51、および第2支持体32に作用する抗力F1,F2を生成する抗力生成部52を用いて吸着ヘッド2の移動速度V1を減速させる。したがって、この半田ボール搭載装置1および球状体搭載方法によれば、移動機構4によって第1支持体31に加えられる駆動力が第2支持体32には加わらないため、移動速度V1を減速させるのに必要なばね定数kや粘性係数Dを算出して、抗力生成部52に組み込むバネ61やダンパ62を選定する際に、移動機構4の駆動力を考慮する必要がなくなるため、その分、選定作業を容易に行うことができる。
【0066】
また、この半田ボール搭載装置1および球状体搭載方法では、バネ61およびダンパ62の双方を備えた抗力生成部52を用いている。このため、この半田ボール搭載装置1および球状体搭載方法によれば、バネ61が生成する抗力F1とダンパ62が生成する抗力F2との相乗効果により、移動体210の移動速度V1を短時間で減速させることができる結果、搭載処理の効率をさらに向上させることができる。
【0067】
また、この半田搭載済基板600では、上記の半田ボール搭載装置1を用いて上記の球状体搭載方法によって基板400の端子401上に搭載した半田ボール300が溶融されて端子401に固着されている。このため、この半田搭載済基板600では、基板400における各端子401上の正確な位置に半田ボール300が過不足なく搭載されている。このため、この半田搭載済基板600では、半田ボール300の溶融によって全ての端子401上に半田ボール300の溶融体(半田301)が確実に固着される。
【0068】
また、この電子部品搭載済基板700では、上記の半田搭載済基板600に固着された半田301を介して電子部品701の端子が半田搭載済基板600の端子401に接続されている。この場合、上記の半田搭載済基板600では、全ての各端子401上に半田301が確実に固着されている。このため、この電子部品搭載済基板700によれば、電子部品701における全ての端子と端子401とが半田301を介して電気的に確実に接続される。
【0069】
なお、球状体搭載装置および球状体搭載方法は、上記の構成および方法に限定されない。例えば、上記した半田ボール搭載装置1に代えて、図13に示す半田ボール搭載装置101、およびこの半田ボール搭載装置101を用いた球状体搭載方法を採用することもできる。なお、以下の説明において、上記した半田ボール搭載装置1と同じ構成要素については、同じ符号を付して、重複する説明を省略する。
【0070】
この半田ボール搭載装置101では、図13に示すように、バネ(圧力調整用)33を備えて支持部3が構成されている。この場合、バネ33は、引張りコイルばね(引きバネ)で構成され、一端部(上端部)が第1支持体31に固定され、他端部(下端部)が第2支持体32の本体部32aに配設された突起部32eに固定されている。このバネ33は、第1支持体31側から第2支持体32を上向きに牽引することにより、搭載処理において半田ボール300を介して搭載対象体としての基板400の端子401に加わる半田ボール300一つ当りの圧力を調整する機能を有している。
【0071】
この半田ボール搭載装置101によれば、圧力調整用のバネ33を備えたことにより、質量(重量)の異なる吸着ヘッド2を付け替えて搭載処理を行う際に、吸着ヘッド2の質量およびその吸着ヘッド2に吸着されている半田ボール300の質量の合計の質量に応じてバネ33を交換する(具体的には、合計の質量が大きいほどばね定数が大きいバネ33を用い、合計の質量が小さいほどばね定数が小さいバネ33を用いる)ことで、半田ボール300から端子401に加わる半田ボール300一つ当りの圧力を適正な圧力に調整することができる。このため、この半田ボール搭載装置101によれば、吸着ヘッド2の種類に拘わらず、端子401に加わる半田ボール300一つ当りの圧力の調整によって各半田ボール300を端子401に対して確実に接触させることができる。
【0072】
また、図14に示す半田ボール搭載装置201、およびこの半田ボール搭載装置101を用いた球状体搭載方法を採用することもできる。なお、以下の説明において、上記した半田ボール搭載装置1,101と同じ構成要素については、同じ符号を付して、重複する説明を省略する。
【0073】
この半田ボール搭載装置201では、図14に示すように、減速機構5が第1支持体31に配設されている。具体的には、この半田ボール搭載装置201では、減速機構5の当接部51に取り付けられているガイドロッド51aが第1支持体31に形成されているガイド孔31cに挿通されることにより、上下方向(第1の方向)沿って移動可能に第1支持体31に連結されている。
【0074】
また、この半田ボール搭載装置201では、図14に示すように、減速機構5の抗力生成部52を構成するバネ61およびダンパ62が、第1支持体31と当接部51との間にそれぞれ配設され、第1支持体31に対する当接部51の相対的な移動の向きと同じ向きに沿って第1支持体31に作用する抗力F1,F2を生成するバネ61およびダンパ62で構成された抗力生成部52とを備えた減速機構5を用いて、搭載処理の実行時において吸着ヘッド2が基板400に近接したときの吸着ヘッド2の移動速度V1を減速させる。
【0075】
また、この半田ボール搭載装置201では、移動機構4のモータ41が、搭載処理において、一定のトルクで回転して一定の力で第1支持体31に対して下向きに力を加える。
【0076】
この半田ボール搭載装置201では、当接部51が載置部11に当接した後に、バネ61およびダンパ62にが生成する抗力F1,F2が当接部51および第1支持体31に作用し、これによって第1支持体31および移動体210の移動速度V1が減速される。したがって、この半田ボール搭載装置201においても、上記した半田ボール搭載装置1と同様の効果を実現することができる。
【0077】
また、第1支持体31と第2支持体32とを備えて第2支持体32が第1支持体31に対してスライド可能に構成されている例について上記したが、第2支持体32と第1支持体31とを一体に形成した構成を採用することもできる。また、抗力生成部52がバネ61およびダンパ62の双方を備えている例について上記したが、バネ61およびダンパ62のいずれか一方のみを備えた抗力生成部を採用することもできる。
【0078】
また、モータ41およびボールねじ42を備えて移動機構4を構成した例について上記したが、エアシリンダで移動機構4を構成することもできる。また、当接部51を載置部11に当接させる例について上記したが、載置部11に載置された基板400に当接部51を当接させることもできる。
【符号の説明】
【0079】
1 半田ボール搭載装置
2 吸着ヘッド
3 支持部
4 移動機構
5 減速機構
11 載置部
11a 載置面
51 当接部
51a ガイドロッド
31 第1支持体
31c ガイド孔
32 第2支持体
32d ガイド孔
33,61 バネ
52 抗力生成部
62 ダンパ
300 半田ボール
301 半田
400 基板
401 端子
600 半田搭載済基板
700 電子部品実装済基板
701 電子部品
F1,F2 抗力
V1 移動速度
x 変位量
【特許請求の範囲】
【請求項1】
球状体を保持する保持ヘッドと、当該保持ヘッドを支持する支持部と、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記支持部を移動させる移動機構とを備え、前記球状体を保持している前記保持ヘッドを移動させて当該球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載装置であって、
前記搭載処理の実行時において前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる減速機構を備え、
前記減速機構は、前記搭載処理の実行時において前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に当接すると共に前記第1の方向に沿って移動可能に前記支持部に連結された当接部と、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って当該支持部に作用する抗力を生成する抗力生成用バネおよびダンパの少なくとも一方で構成された抗力生成部とを備えている球状体搭載装置。
【請求項2】
前記支持部は、前記移動機構によって移動させられる第1支持体と、前記保持ヘッドが固定されると共に前記第1支持体に対して前記第1の方向に沿ってスライド可能に当該第1支持体に連結された第2支持体とを備えて構成され、
前記当接部は、前記第2支持体に連結され、
前記抗力生成部は、前記第2支持体に作用する抗力を生成する請求項1記載の球状体搭載装置。
【請求項3】
前記第1支持体に一端部が取り付けられると共に前記第2支持体に他端部が取り付けられて前記第2支持体を牽引して前記搭載処理において前記球状体から前記搭載対象体に加わる当該球状体一つ当りの圧力を調整する圧力調整用バネを備えている請求項2記載の球状体搭載装置。
【請求項4】
前記抗力生成部は、前記抗力生成用バネおよび前記ダンパの双方を備えて構成されている請求項1から3のいずれかに記載の球状体搭載装置。
【請求項5】
保持ヘッドに球状体を保持させ、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記保持ヘッドを支持している支持部を移動させ、前記球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載方法であって、
前記第1の方向に沿って移動可能に前記支持部に連結された当接部と抗力生成用バネおよびダンパの少なくとも一方で構成されて抗力を生成する抗力生成部とを備えた減速機構を用いて前記搭載処理を実行し、その際に、
前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に前記当接部を当接させ、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って前記抗力を当該支持部に作用させて前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる球状体搭載方法。
【請求項6】
請求項1から4のいずれかに記載の球状体搭載装置によって前記搭載対象体としての基板の端子に搭載された前記球状体を溶融して当該端子に固着させた球状体搭載済基板。
【請求項7】
請求項5記載の球状体搭載方法によって前記搭載対象体としての基板の端子に搭載された前記球状体を溶融して当該端子に固着させた球状体搭載済基板。
【請求項8】
請求項6または7記載の球状体搭載済基板に固着された前記球状体の溶融体を介して接続された電子部品が当該球状体搭載済基板に搭載されている電子部品搭載済基板。
【請求項1】
球状体を保持する保持ヘッドと、当該保持ヘッドを支持する支持部と、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記支持部を移動させる移動機構とを備え、前記球状体を保持している前記保持ヘッドを移動させて当該球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載装置であって、
前記搭載処理の実行時において前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる減速機構を備え、
前記減速機構は、前記搭載処理の実行時において前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に当接すると共に前記第1の方向に沿って移動可能に前記支持部に連結された当接部と、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って当該支持部に作用する抗力を生成する抗力生成用バネおよびダンパの少なくとも一方で構成された抗力生成部とを備えている球状体搭載装置。
【請求項2】
前記支持部は、前記移動機構によって移動させられる第1支持体と、前記保持ヘッドが固定されると共に前記第1支持体に対して前記第1の方向に沿ってスライド可能に当該第1支持体に連結された第2支持体とを備えて構成され、
前記当接部は、前記第2支持体に連結され、
前記抗力生成部は、前記第2支持体に作用する抗力を生成する請求項1記載の球状体搭載装置。
【請求項3】
前記第1支持体に一端部が取り付けられると共に前記第2支持体に他端部が取り付けられて前記第2支持体を牽引して前記搭載処理において前記球状体から前記搭載対象体に加わる当該球状体一つ当りの圧力を調整する圧力調整用バネを備えている請求項2記載の球状体搭載装置。
【請求項4】
前記抗力生成部は、前記抗力生成用バネおよび前記ダンパの双方を備えて構成されている請求項1から3のいずれかに記載の球状体搭載装置。
【請求項5】
保持ヘッドに球状体を保持させ、載置部に載置された搭載対象体に対して近接および離反する第1の方向に沿って前記保持ヘッドを支持している支持部を移動させ、前記球状体を前記搭載対象体に当接させた状態で保持を解除させて前記搭載対象体に搭載する搭載処理を実行する球状体搭載方法であって、
前記第1の方向に沿って移動可能に前記支持部に連結された当接部と抗力生成用バネおよびダンパの少なくとも一方で構成されて抗力を生成する抗力生成部とを備えた減速機構を用いて前記搭載処理を実行し、その際に、
前記保持ヘッドによって保持されている前記球状体が前記搭載対象体に当接する前に当該搭載対象体および前記載置部の少なくとも一方に前記当接部を当接させ、前記支持部に対する前記当接部の相対的な移動の向きと同じ向きに沿って前記抗力を当該支持部に作用させて前記保持ヘッドが前記搭載対象体に近接したときの当該保持ヘッドの移動速度を減速させる球状体搭載方法。
【請求項6】
請求項1から4のいずれかに記載の球状体搭載装置によって前記搭載対象体としての基板の端子に搭載された前記球状体を溶融して当該端子に固着させた球状体搭載済基板。
【請求項7】
請求項5記載の球状体搭載方法によって前記搭載対象体としての基板の端子に搭載された前記球状体を溶融して当該端子に固着させた球状体搭載済基板。
【請求項8】
請求項6または7記載の球状体搭載済基板に固着された前記球状体の溶融体を介して接続された電子部品が当該球状体搭載済基板に搭載されている電子部品搭載済基板。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】

【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−4742(P2013−4742A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−134434(P2011−134434)
【出願日】平成23年6月16日(2011.6.16)
【出願人】(000227180)日置電機株式会社 (982)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月16日(2011.6.16)
【出願人】(000227180)日置電機株式会社 (982)
【Fターム(参考)】
[ Back to top ]