
球状体搭載装置および球状体搭載方法
【課題】球状体の搭載位置と目標搭載位置との位置ずれによる不良品の発生を低減する。
【解決手段】球状体を吸着する吸着ヘッド11と、基板400を支持すると共に支持状態の基板400の位置を変更可能に構成された基板搬送部4と、球状体を吸着している吸着ヘッド11を移動させて基板400の目標搭載位置に球状体を搭載する搭載処理を実行する搭載部3と、基板搬送部4および搭載部3を制御する制御部と、球状体が搭載された基板400の撮像画像に基づいて球状体の搭載状態の良否検査を実行する検査部とを備え、制御部は、良否検査に用いた撮像画像に基づいて球状体の搭載位置と目標搭載位置との位置ずれを補正するための補正値を特定すると共に、良否検査の以後に実行する搭載処理において、基板搬送部4による基板400の位置の変更量および搭載部3による吸着ヘッド11の移動距離を補正値に基づいて増減させて位置ずれを補正する。
【解決手段】球状体を吸着する吸着ヘッド11と、基板400を支持すると共に支持状態の基板400の位置を変更可能に構成された基板搬送部4と、球状体を吸着している吸着ヘッド11を移動させて基板400の目標搭載位置に球状体を搭載する搭載処理を実行する搭載部3と、基板搬送部4および搭載部3を制御する制御部と、球状体が搭載された基板400の撮像画像に基づいて球状体の搭載状態の良否検査を実行する検査部とを備え、制御部は、良否検査に用いた撮像画像に基づいて球状体の搭載位置と目標搭載位置との位置ずれを補正するための補正値を特定すると共に、良否検査の以後に実行する搭載処理において、基板搬送部4による基板400の位置の変更量および搭載部3による吸着ヘッド11の移動距離を補正値に基づいて増減させて位置ずれを補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搭載対象体の目標搭載位置に球状体を搭載する搭載処理を実行すると共に、球状体の搭載状態の良否検査を実行する球状体搭載装置および球状体搭載方法に関するものである。
【背景技術】
【0002】
この種の球状体搭載装置として、特開2011−40704号公報において出願人が開示した球状体搭載装置が知られている。この球状体搭載装置では、供給部によって供給された半田ボール(球状体)を吸着ヘッドが吸着し、次いで、その吸着ヘッドを搭載対象体としての基板の配置位置に搬送し、基板の各端子(目標搭載位置)に対して各半田ボールをそれぞれ近接させる。続いて、吸着ヘッドによる吸着を解除する。これにより、基板の各端子に半田ボールがそれぞれ搭載される。
【0003】
また、出願人は、半田ボールを搭載する搭載処理が完了した搭載済基板を撮像して、その撮像画像に基づいて各端子に対する半田ボールの搭載状態の良否(半田ボールの搭載位置と端子の位置との位置ずれの有無)を検査する検査部を上記の球状体搭載装置に加えた球状体搭載装置を既に開発している。この球状体搭載装置では、搭載処理が完了した搭載済基板を完了順に全数検査することで、良品と不良品とを確実に仕分けることが可能となっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−40704号公報(第6−11頁、第7−10図)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、検査部を備えた上記の球状体搭載装置にも、改善すべき以下の課題がある。すなわち、従来の球状体搭載装置では、検査部による検査結果を搭載処理にフィードバックする機能を有していないため、例えば、数多くの基板に対して搭載処理を連続して行う際に、搭載状態が不良と判定されたとしても、その状態で搭載処理が継続されることとなり、不良品が数多く発生するおそれがあるという課題が存在する。
【0006】
本発明は、かかる改善すべき課題に鑑みてなされたものであり、球状体の搭載位置と目標搭載位置との位置ずれによる不良品の発生を低減し得る球状体搭載装置および球状体搭載方法を提供することを主目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成すべく請求項1記載の球状体搭載装置は、球状体を吸着する吸着ヘッドと、搭載対象体を支持すると共に支持状態の当該搭載対象体の位置を変更可能に構成された支持部と、前記球状体を吸着している前記吸着ヘッドを移動させて前記搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行する搭載部と、前記支持部および前記搭載部を制御する制御部と、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する検査部とを備えた球状体搭載装置であって、前記制御部は、前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する。
【0008】
また、請求項2記載の球状体搭載装置は、請求項1記載の球状体搭載装置において、前記制御部は、複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する。
【0009】
また、請求項3記載の球状体搭載装置は、請求項2記載の球状体搭載装置において、前記制御部は、前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する。
【0010】
また、請求項4記載の球状体搭載方法は、球状体を吸着している吸着ヘッドを移動させて支持状態の搭載対象体の位置を変更可能な支持部に支持されている当該搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行し、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する球状体搭載方法であって、前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する。
【0011】
また、請求項5記載の球状体搭載方法は、請求項4記載の球状体搭載方法において、複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する。
【0012】
また、請求項6記載の球状体搭載方法は、請求項5記載の球状体搭載方法において、前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する。
【発明の効果】
【0013】
請求項1記載の球状体搭載装置、および請求項4記載の球状体搭載方法では、良否検査に用いた撮像画像に基づいて補正値を特定すると共に、その良否検査の以後に実行する搭載処理において、支持部による搭載対象体の位置の変更量および搭載部による吸着ヘッドの移動距離の少なくとも一方を補正値に基づいて増減させて位置ずれを補正する。このため、この球状体搭載装置および球状体搭載方法によれば、良否検査の直前に実行した搭載処理において生じた位置ずれを良否検査以後に実行する搭載処理において補正することができるため、数多くの搭載対象体に対して搭載処理を連続して行う場合において、その位置ずれした状態が継続される事態を確実に防止することができる。したがって、この球状体搭載装置および球状体搭載方法によれば、球状体の搭載位置と目標搭載位置との位置ずれによる不良品の発生を十分に低減することができる。
【0014】
また、請求項2記載の球状体搭載装置、および請求項5記載の球状体搭載方法によれば、第1領域の中心位置、第2領域の中心位置、第3領域の中心位置、および第4領域の中心位置を算出すると共に、各中心位置に基づいて吸着ヘッドと搭載対象体との位置ずれ量を算出し、その位置ずれ量を補正値として特定することにより、例えば、球状体の搭載位置と目標搭載位置との位置ずれ量を各球状体(各目標搭載位置)毎に個別に求めて平均して吸着ヘッドと搭載対象体との位置ずれ量を算出する構成および方法と比較して算出手順を十分に簡略化することができるため、補正値を短時間でかつ正確に特定することができる。
【0015】
また、請求項3記載の球状体搭載装置、および請求項6記載の球状体搭載方法によれば、第1領域の中心位置と第3領域の中心位置とを結ぶ線分の中点の位置、および第2領域の中心位置と第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、各中点の位置に基づいて吸着ヘッドと搭載対象体との位置ずれ量を算出することにより、例えば、各中点の位置に基づいて座標変換を行うことで、位置ずれ量を容易に算出することができる。
【図面の簡単な説明】
【0016】
【図1】半田ボール搭載装置1の構成を示す構成図である。
【図2】半田ボール搭載装置1の平面図である。
【図3】基板400の平面図である。
【図4】吸着ヘッド11、供給部12およびプレート13の断面図である。
【図5】吸着ヘッド11に半田ボール300が吸着された状態を示す断面図である。
【図6】吸着部2の動作を説明する説明図である。
【図7】補正値特定処理を説明する第1の説明図である。
【図8】補正値特定処理を説明する第2の説明図である。
【発明を実施するための形態】
【0017】
以下、球状体搭載装置および球状体搭載方法の実施の形態について、添付図面を参照して説明する。
【0018】
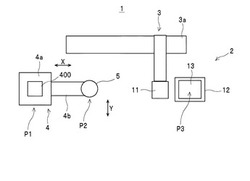
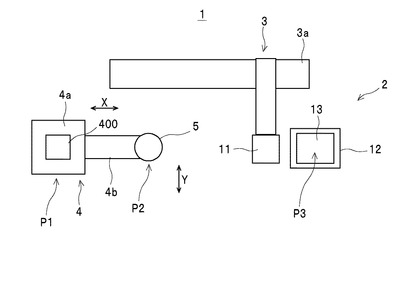
最初に、図1に示す半田ボール搭載装置1の構成について説明する。半田ボール搭載装置1は、球状体搭載装置の一例であって、基板400(搭載対象体の一例:図3参照)の端子401(目標搭載位置の一例)に対して、直径L1(図5参照)が80μm程度の微細な半田ボール300(球状体の一例:同図参照)を搭載する搭載処理を実行可能に構成されている。また、半田ボール搭載装置1は、半田ボール300が搭載された基板400(図7参照:以下、「搭載済基板600」ともいう)の撮像画像に基づいて端子401に対する半田ボール300の搭載状態の良否検査を実行可能に構成されている。なお、半田ボール搭載装置1によって基板400の各端子401にそれぞれ搭載された半田ボール300は、加熱溶融されて、半球状の溶融体となった状態で各端子401に固着されてボールグリッドアレイ(BGA)を構成する。
【0019】
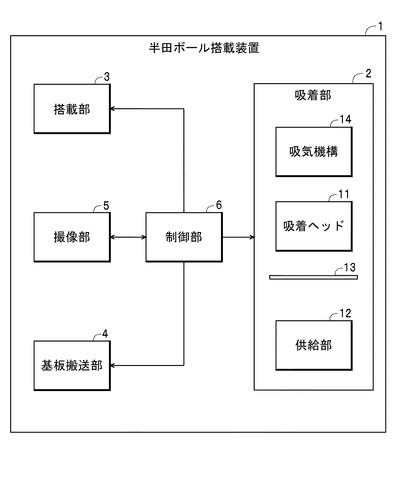
また、半田ボール搭載装置1は、図1に示すように、吸着部2、搭載部3、基板搬送部4、撮像部5および制御部6を備えて構成されている。
【0020】
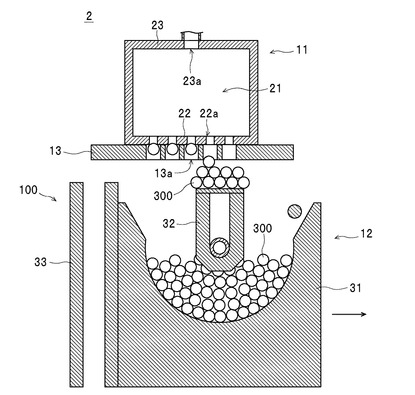
吸着部2は、図1に示すように、吸着ヘッド11、供給部12、プレート13および吸気機構14を備えて構成されて半田ボール300を吸着する(後述する吸着処理を実行する)。
【0021】
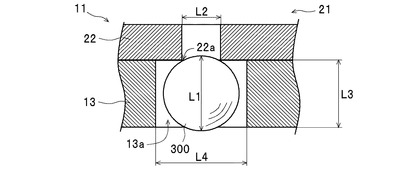
吸着ヘッド11は、一例として、図4に示すように、内部空間21を有する中空の箱型に構成されている。また、図4,5に示すように、吸着ヘッド11の底面22には、半田ボール300を吸着するための複数の吸気口22aが形成されている。この場合、各吸気口22aは、直径L2(図5参照)が例えば40μm程度に規定され、基板400における各端子401の配列パターン(図3参照)と同じ配列パターンで底面22に形成されている。つまり、各吸気口22aによって吸着された各半田ボール300は、搭載処理の実行によって基板400における各端子401(目標搭載位置)に搭載される。
【0022】
また、図4に示すように、吸着ヘッド11の天面23には、内部空間21の空気を吸気するための吸気孔23aが形成されている。この吸着ヘッド11では、内部空間21の空気が吸気孔23aを介して吸気機構14によって吸気されて内部空間21が負圧状態となり、それに伴って吸気口22aからの吸気が行われることにより、吸気口22aに半田ボール300を吸着する(図6参照)。
【0023】
供給部12は、図4に示すように、収容容器31、保持部32および吸引部33を備えて、吸着ヘッド11に半田ボール300を供給可能に構成されている。収容容器31は、半田ボール300を収容する。保持部32は、吸気機構14に接続されており、収容容器31に収容されている半田ボール300を先端部(同図における下端部)で吸着して保持する。また、保持部32は、基端部(同図における上端部)を中心として回動可能に構成されている。吸引部33は、吸気機構14に接続されており、吸着ヘッド11に供給される半田ボール300のうちの余剰分を吸引して除去する。また、供給部12は、図外の駆動部を備えており、制御部6の制御に従い、収容容器31、保持部32および吸引部33(以下、この3つの構成要素をまとめて「供給部本体100」ともいう)を移動させる処理、並びに保持部32を回動させる処理を行う。
【0024】
プレート13は、図4に示すように、板状に構成され、吸着ヘッド11の底面22に近接(または接触)している状態(図5に示す状態)において吸着ヘッド11の吸気口22aに対向する位置に、半田ボール300が通過可能な(直径L4(同図参照)が95μm程度の)挿通孔13aが形成されている。このプレート13は、供給部12によって供給された半田ボール300を挿通孔13aに挿通させて吸着ヘッド11の吸気口22aに吸着させると共に、吸着ヘッド11による余剰な半田ボール300の吸着を規制する機能を有している。この場合、同図に示すように、プレート13の厚みL3は、吸気口22aに吸着された半田ボール300の端部が下面からやや突出する75μm程度に規定されている。
【0025】
吸気機構14は、吸気管24(図4参照)を介して吸着ヘッド11の吸気孔23aに接続されて、吸着ヘッド11における内部空間21の空気を吸引する。また、吸気機構14は、供給部12の保持部32および吸引部33に図外の吸気管を介して接続され、保持部32の先端部および吸引部33の先端部からの吸気を行う。この場合、吸気機構14は、複数の電磁バルブを備えており、内部空間21の空気の吸引、並びに保持部32および吸引部33からの吸気を個別に行うことが可能に構成されている。
【0026】
搭載部3は、図2に示すように、移動機構3aを備えて構成されている。移動機構3aは、同図に示す矢印Xの方向(以下、「X方向」ともいう)、同図に示す矢印Yの方向(以下、「Y方向」ともいう)、および上下方向(X方向およびY方向に直交する)に吸着部2の吸着ヘッド11を移動可能に構成されている。この搭載部3は、制御部6の制御に従い、吸着ヘッド11を吸着地点P3(吸着ヘッド11に半田ボール300を吸着させる位置であって、吸着部2におけるプレート13の配設位置:図2参照)に移動させる。また、搭載部3は、制御部6の制御に従い、半田ボール300を吸着している吸着ヘッド11を搭載地点P2(基板400に半田ボール300を搭載する位置:同図参照)に移動させて端子401に半田ボール300を搭載させる。
【0027】
基板搬送部4は、支持部に相当し、図2に示すように、ステージ4aおよび移動機構4bを備えて構成されている。ステージ4aは、搭載対象体としての基板400をその載置面(上面)に載置可能に構成されると共に、載置された基板400を例えば吸着することによって固定(支持)可能に構成されている。また、ステージ4aは、載置面に直交する軸を中心として回動する方向(以下、「θ方向」ともいう)に基板400の位置を変更(基板400をX−Y平面上で回動)させることが可能に構成されている。
【0028】
移動機構4bは、制御部6の制御に従い、図2に示す供給地点P1(基板400をステージ4aに供給(載置)する位置)と搭載地点P2との間で、同図に示す矢印Xの方向(X方向)にステージ4aを移動させる(基板400の位置を変更させる)。
【0029】
撮像部5は、図2に示すように、搭載地点P2の上方に配置されて、制御部6の制御に従い、搭載済基板600(半田ボール300が搭載された基板400)を撮像する。
【0030】
制御部6は、吸着部2、搭載部3、基板搬送部4および撮像部5を制御する。また、制御部6は、検査部として機能し、撮像部5によって撮像された搭載済基板600の撮像画像に基づいて目標搭載位置としての端子401に対する半田ボール300の搭載状態の良否検査を実行する。この場合、制御部6は、撮像画像に基づいて半田ボール300の搭載位置、および端子401の位置を測定し、測定した各位置から半田ボール300の搭載位置と端子401の位置との位置ずれ量を算出すると共に、その位置ずれ量が予め規定された規定値以下のときには、半田ボール300の搭載状態が良好と判定し、規定値を超えるときには、半田ボール300の搭載状態が不良と判定する。
【0031】
また、制御部6は、搭載済基板600の撮像画像に基づいて半田ボール300の搭載位置と目標搭載位置としての端子401の位置との位置ずれを補正するための補正値Rを特定する。さらに、制御部6は、基板搬送部4による基板400の位置の変更量、および搭載部3による吸着ヘッド11の移動距離の少なくとも一方(つまり、変更量のみ、移動距離のみ、並びに変更量および移動距離の双方のいずれか)を増減して全体として補正値R分を相殺して位置ずれを補正する。
【0032】
次に、半田ボール搭載装置1を用いて、半田ボール300を基板400の各端子401に搭載する球状体搭載方法について、図面を参照して説明する。
【0033】
この半田ボール搭載装置1では、搭載処理の開始が指示されたときに、図2に示すように、供給地点P1に位置している基板搬送部4におけるステージ4aの載置面に図外の供給装置が基板400を載置(供給)し、ステージ4aがその基板400を保持する。
【0034】
次いで、制御部6が搭載処理を開始する。この搭載処理では、制御部6が、基板搬送部4の移動機構4bを制御して、ステージ4aを供給地点P1から搭載地点P2に移動させる。続いて、制御部6は、搭載部3の移動機構3aを制御して、吸着部2の吸着ヘッド11を吸着地点P3(プレート13の配設位置)に搬送させ、図5に示すように、底面22とプレート13とを接触(近接)させる。なお、この時点では、半田ボール300は吸着されていない。
【0035】
次いで、制御部6は、吸着部2に吸着処理を実行させる。この吸着処理では、制御部6は、吸着部2における吸気機構14の電磁バルブを制御して、吸着ヘッド11の内部空間21の空気の吸引を開始させる。この際に、吸着ヘッド11の内部空間21が負圧状態となって吸気口22aからの吸気が開始される。
【0036】
また、制御部6は、吸気機構14を制御して、供給部12における保持部32の先端部、および供給部12における吸引部33の先端部からの吸気を開始させる。続いて、保持部32の先端部(図4における下端部)からの吸気に伴い、収容容器31に収容されている半田ボール300が保持部32の先端部に吸着されて保持される。次いで、制御部6は、供給部12における図外の駆動部を制御して、保持部32の基端部側(図6における下側)を中心として保持部32を回動させる。続いて、制御部6は、保持部32の先端部がプレート13に対向した時点で、供給部12の駆動部を制御して、保持部32の回動を停止させる。
【0037】
次いで、制御部6は、供給部12の駆動部を制御して、プレート13に向けて供給部本体100を移動させ、続いて、図6に示すように、保持部32の先端部をプレート13に近接させた状態を維持しつつ供給部本体100をプレート13に沿って同図に示す矢印の向きに移動させる。この際に、先端部に保持されている半田ボール300が、吸着ヘッド11における吸気口22aからの吸気に伴う吸引力によって引き寄せられて吸着ヘッド11に供給され、供給された半田ボール300がプレート13の各挿通孔13aを通って吸着ヘッド11の各吸気口22aに1つずつ吸着される。
【0038】
次いで、制御部6は、供給部12の駆動部を制御して、供給部本体100をプレート13に沿ってさらに移動させる。この際に、吸引部33が、プレート13に付着している余剰な半田ボール300を吸引して除去する。以上で、吸着処理が終了する。
【0039】
続いて、制御部6は、搭載部3の移動機構3aを制御して、吸着ヘッド11を搭載地点P2の上方に移動させた後に、吸着ヘッド11を下向きに移動させて、吸着ヘッド11によって吸着されている半田ボール300を、搭載地点P2に搬送されている基板400の搭載面(端子401が設けられている面)に近接(接触)させる。
【0040】
次いで、制御部6は、吸気機構14の電磁バルブを制御して、吸着ヘッド11の内部空間21からの空気の吸引(吸気口22aからの吸気)を停止させる。この際に、吸気口22aによる吸着が解除されて、図7に示すように、半田ボール300が基板400の端子401に搭載される。以上で搭載処理が終了する。続いて、制御部6は、搭載部3の移動機構3aを制御して、吸着ヘッド11を上方に向けて移動させた後に、初期位置に移動させる。
【0041】
次いで、制御部6は、良否検査および補正値特定処理を実行する。制御部6は、この良否検査において、撮像部5を制御して搭載済基板600(半田ボール300が搭載された基板400)を撮像させる。続いて、制御部6は、撮像部5によって撮像された撮像画像に基づき、各半田ボール300の搭載位置、および各端子401の位置を測定する。次いで、制御部6は、測定した各位置から半田ボール300の搭載位置と端子401の位置との位置ずれ量を算出する。続いて、制御部6は、算出した位置ずれ量が予め決められた基準値以下のときには、半田ボール300の搭載状態が良好と判定し、基準値を超えるときには、半田ボール300の搭載状態が不良と判定する。
【0042】
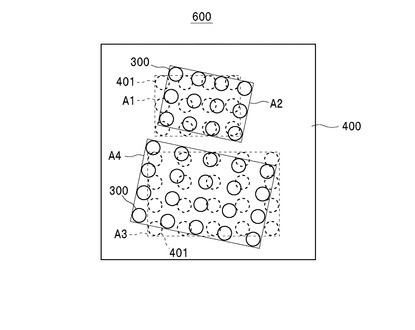
一方、制御部6は、半田ボール300の搭載位置と端子401の位置との位置ずれを補正するための補正値Rを一例として次の手順で特定する。なお、以下の説明に用いる図7,8では、半田ボール300と端子401との位置ずれを誇張して図示している。制御部6は、まず、基板400における各端子401の一部(一例として、図7における基板400の上部側に設けられている12個の端子401)の各位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各端子401を取り囲む(各端子401が含まれる)第1領域A1の中心位置Pc1(図8参照)を算出する。この場合、第1領域A1は、一例として、図7に示すように、各端子401(この例では、上記した12個の端子401)の外周に接する矩形(一例として長方形)の領域に規定されている。また、中心位置Pc1は、一例として、第1領域A1に2本の対角線を描き、各対角線の交点の位置を求めることで算出される。
【0043】
続いて、制御部6は、第1領域A1内の各端子401に搭載された半田ボール300の搭載位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各搭載位置を取り囲む(各搭載位置が含まれる)第2領域A2の中心位置Pc2(図8参照)を算出する。この場合、第2領域A2は、一例として、図7に示すように、第1領域A1内の各端子401に搭載された各半田ボール300の外周に接する矩形(一例として長方形)の領域に規定されている。また、中心位置Pc2は、一例として、第2領域A2に2本の対角線を描き、各対角線の交点の位置を求めることで算出される。
【0044】
続いて、制御部6は、第1領域A1内の端子401とは異なる複数の端子401(一例として、図7における基板400の下部側に設けられている20個の端子401)の各位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各端子401を取り囲む(各端子401が含まれる)第3領域A3の中心位置Pc3(図8参照)を算出する。続いて、制御部6は、第3領域A3内の各端子401に搭載された半田ボール300の搭載位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各搭載位置を取り囲む(各搭載位置が含まれる)第4領域A4の中心位置Pc4(同図参照)を算出する。この場合、第3領域A3は、上記した第1領域A1と同様に各端子401の外周に接する矩形(一例として長方形)の領域に規定され、第4領域A4は、上記した第2領域A2と同様に各半田ボール300の外周に接する矩形(一例として長方形)の領域に規定されている。また、中心位置Pc3,Pc4は、上記した中心位置Pc1,Pc2と同様の手法で算出される。
【0045】
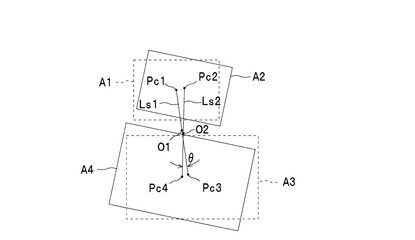
続いて、制御部6は、図8に示すように、第1領域A1の中心位置Pc1と第3領域A3の中心位置Pc3とを結ぶ線分Ls1の中点O1の位置(座標)を算出すると共に、第2領域A2の中心位置Pc2と第4領域A4の中心位置Pc4とを結ぶ線分Ls2の中点O2の位置(座標)を算出する。また、線分Ls1と線分Ls2とのなす角度θを算出する。次いで、制御部6は、中点O1の位置および中点O2の位置、並びに角度θに基づき、吸着ヘッド11(吸着ヘッド11の底面22全体)と基板400(基板400の搭載面全体)との位置ずれ量Gを算出する。
【0046】
ここで、中点O1の座標を(XO1,YO1)とし、中点O2の座標を(XO2,YO2)として、Ls2を角度θだけ回動させて、線分Ls1とLs2とを平行状態としたときの中点O2の新たな座標(XO2θ,YO2θ)を求める。つまり、中点O2の座標を中点O1の座標系に座標変換(回転変換)したときの新たな座標(XO2θ,YO2θ)を求める。この場合、座標変換の公式より、XO2θおよびYO2θは、次の(1)式および(2)式で与えられる。
XO2θ=XO2cosθ−YO2sinθ・・・(1)式
YO2θ=XO2sinθ+YO2cosθ・・・(2)式
続いて、中点O1と変換後の中点O2との間のX方向に沿った離間距離(XO1−XO2θ)、つまり、位置ずれ量GのX方向成分(ΔX)を上記(1)式を用いた次の(3)式から算出する。
ΔX=XO1−XO2θ=XO1−(XO2cosθ−YO2sinθ)・・・(3)式
また、中点O1と変換後の中点O2との間のY方向に沿った離間距離(YO1−YO2θ)、つまり位置ずれ量GのY方向成分(ΔY)を上記(2)式を用いた次の(4)式から算出する。
ΔY=YO1−YO2θ=YO1−(XO2sinθ+YO2cosθ)・・・(4)式
以上により、位置ずれ量GのX方向成分、Y方向成分およびθ方向成分が算出され、制御部6は、この位置ずれ量Gを補正値Rとして特定する。
【0047】
次いで、良否検査が終了した搭載済基板600を図外の取り出し装置がステージ4aから取り出す。続いて、制御部6は、基板搬送部4の移動機構4bを制御してステージ4aを搭載地点P2から供給地点P1に移動させる。次いで、図外の供給装置が新たな基板400をステージ4aの載置面に載置し、ステージ4aがその基板400を保持する。
【0048】
続いて、制御部6は上記した搭載処理を実行する。この際に、制御部6は、補正値Rに基づく補正処理を実行する。ここで、この補正値Rに対応する上記した位置ずれ量Gは、主として、搭載部3における移動機構3aの機械精度や基板400の寸法精度に起因するものであり、移動機構3aを制御して吸着ヘッド11を移動させる際に指定する移動距離を補正値RのX方向成分およびY方向成分の値(または、Y方向成分の値)だけ増減させ、かつ基板搬送部4を制御して基板400の位置を変更させる際の変更量を補正値Rのθ方向成分の値(または、X方向成分およびθ方向成分の値)だけ増減させることで、上記した中心位置Pc1,Pc2が一致すると共に中心位置Pc3,Pc4が一致して(中点O1,O2も一致する)位置ずれ量Gが相殺され、これによって位置ずれが補正される。
【0049】
この例では、制御部6は、基板搬送部4を制御して供給地点P1から搭載地点P2に基板400の位置を変更させる(基板400を移動させる)際の変更量を補正値Rのθ方向成分の値だけ増減させ移動(回動)させ、移動機構3aを制御して半田ボール300を吸着している吸着ヘッド11を吸着地点P3から搭載地点P2に移動させる際に指定する移動距離を補正値RのX方向成分およびY方向成分の値だけ増減させる。
【0050】
次いで、制御部6は、搭載部3の移動機構3aを制御して、吸着ヘッド11によって吸着されている半田ボール300を、基板400の搭載面に近接(接触)させ、続いて、吸気機構14の電磁バルブを制御して、吸着ヘッド11における吸気口22aからの吸気を停止させる。これにより、半田ボール300が基板400における端子401に搭載され、搭載処理が終了する。この場合、この半田ボール搭載装置1では、良否検査において用いた搭載済基板600の撮像画像に基づいて特定した補正値R、つまり、良否検査の直前に実行した搭載処理において生じた位置ずれ量Gに相当する補正値Rを特定して、良否検査の以後に実行する搭載処理において、その補正値Rを用いた補正処理を行う。このため、この半田ボール搭載装置1では、良否検査の直前の搭載処理において生じた位置ずれが、良否検査以後の搭載処理において確実に補正されるため、数多くの基板400に対して搭載処理を連続して行う場合において、その位置ずれした状態が継続される事態が確実に防止される結果、半田ボール300の搭載位置と端子401との位置ずれによる不良品の発生を十分に低減することが可能となっている。
【0051】
次いで、制御部6は、移動機構3aを制御して、吸着ヘッド11を初期位置に移動させた後に、上記した良否検査および補正値特定処理を実行する。以後、制御部6は、新たな基板400に対する搭載処理の実行時に、その以前(この例では直前)の補正値特定処理によって特定した補正値Rに基づく補正処理を実行する。
【0052】
このように、この半田ボール搭載装置1および球状体搭載方法では、良否検査に用いた撮像画像に基づいて半田ボール300の搭載位置と端子401との位置ずれを補正するための補正値Rを特定すると共に、その良否検査の以後に実行する搭載処理において、基板搬送部4による基板400の位置の変更量および搭載部3による吸着ヘッド11の移動距離を補正値Rに基づいて増減させて位置ずれを補正する。このため、この半田ボール搭載装置1および球状体搭載方法によれば、良否検査の直前に実行した搭載処理において生じた位置ずれを良否検査以後に実行する搭載処理において補正することができるため、数多くの基板400に対して搭載処理を連続して行う場合において、その位置ずれした状態が継続される事態を確実に防止することができる。したがって、この半田ボール搭載装置1および球状体搭載方法によれば、半田ボール300の搭載位置と端子401との位置ずれによる不良品の発生を十分に低減することができる。
【0053】
また、この半田ボール搭載装置1および球状体搭載方法によれば、第1領域A1の中心位置Pc1、第2領域A2の中心位置Pc2、第3領域A3の中心位置Pc3、および第4領域A4の中心位置Pc4を算出すると共に、各中心位置Pc1〜Pc4に基づいて吸着ヘッド11の底面22全体と基板400の搭載面全体との位置ずれ量Gを算出し、その位置ずれ量Gを補正値Rとして特定することにより、例えば、半田ボール300の搭載位置と端子401との位置ずれ量を各半田ボール300(各端子401)毎に個別に求めて平均して位置ずれ量Gを算出する構成および方法と比較して算出手順を十分に簡略化することができるため、補正値Rを短時間でかつ正確に特定することができる。
【0054】
また、この半田ボール搭載装置1および球状体搭載方法によれば、第1領域A1の中心位置Pc1と第3領域A3の中心位置Pc3とを結ぶ線分Ls1の中点O1の位置、および第2領域A2の中心位置Pc2と第4領域A4の中心位置Pc4とを結ぶ線分Ls2の中点O2の位置を算出すると共に、各中点O1,O2の位置に基づいて位置ずれ量Gを算出することにより、例えば、中点O1,O2の位置に基づいて座標変換を行うことで、位置ずれ量Gを容易に算出することができる。
【0055】
なお、球状体搭載装置および球状体搭載方法は、上記の構成および方法に限定されない。例えば、良否検査を1回実行する毎に補正処理を実行する構成および方法について上記したが、良否検査において算出した位置ずれ量Gが、予め規定された規定値(上記した不良と判定する規定値よりも小さい規定値)以上となったときに補正処理を実行する構成および方法を採用することもできる。また、良否検査を複数回実行する毎に1回の補正処理を実行する構成および方法を採用することもできる。
【0056】
また、上記の半田ボール搭載装置1では、基板搬送部4のステージ4aがX方向にのみ移動可能に構成されているが、X方向およびY方向の双方にステージ4aを移動可能に構成した基板搬送部を採用することもできる。この構成を採用したときには、基板搬送部4による基板400の位置の変更量を補正値RのY方向成分を増減することで、位置ずれのY方向成分を補正することができる。また、上記の例では、基板搬送部4による基板400の位置の変更量を補正値Rのθ方向成分の値だけ増減させたが、これに加えて、補正値RのX方向成分についても変更量を増減させることもできる。
【0057】
また、補正値Rにθ方向成分が含まれていないときには、搭載部3による吸着ヘッド11の移動距離のみ補正値RのX方向成分およびY方向成分の値だけ増減させることができる。また、補正値RにX方向成分およびY方向成分が含まれていないときには、基板搬送部4による基板400の位置の変更量のみ補正値Rのθ方向成分の値だけ増減させることができる。
【符号の説明】
【0058】
1 半田ボール搭載装置
2 吸着部
3 搭載部
3a 移動機構
4 基板搬送部
4a ステージ
4b 移動機構
5 撮像部
6 制御部
11 吸着ヘッド
300 半田ボール
400 基板
401 端子
A1 第1領域
A2 第2領域
A3 第3領域
A4 第4領域
Ls1,Ls2 線分
O1,O2 中点
Pc1〜Pc4 中心位置
【技術分野】
【0001】
本発明は、搭載対象体の目標搭載位置に球状体を搭載する搭載処理を実行すると共に、球状体の搭載状態の良否検査を実行する球状体搭載装置および球状体搭載方法に関するものである。
【背景技術】
【0002】
この種の球状体搭載装置として、特開2011−40704号公報において出願人が開示した球状体搭載装置が知られている。この球状体搭載装置では、供給部によって供給された半田ボール(球状体)を吸着ヘッドが吸着し、次いで、その吸着ヘッドを搭載対象体としての基板の配置位置に搬送し、基板の各端子(目標搭載位置)に対して各半田ボールをそれぞれ近接させる。続いて、吸着ヘッドによる吸着を解除する。これにより、基板の各端子に半田ボールがそれぞれ搭載される。
【0003】
また、出願人は、半田ボールを搭載する搭載処理が完了した搭載済基板を撮像して、その撮像画像に基づいて各端子に対する半田ボールの搭載状態の良否(半田ボールの搭載位置と端子の位置との位置ずれの有無)を検査する検査部を上記の球状体搭載装置に加えた球状体搭載装置を既に開発している。この球状体搭載装置では、搭載処理が完了した搭載済基板を完了順に全数検査することで、良品と不良品とを確実に仕分けることが可能となっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−40704号公報(第6−11頁、第7−10図)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、検査部を備えた上記の球状体搭載装置にも、改善すべき以下の課題がある。すなわち、従来の球状体搭載装置では、検査部による検査結果を搭載処理にフィードバックする機能を有していないため、例えば、数多くの基板に対して搭載処理を連続して行う際に、搭載状態が不良と判定されたとしても、その状態で搭載処理が継続されることとなり、不良品が数多く発生するおそれがあるという課題が存在する。
【0006】
本発明は、かかる改善すべき課題に鑑みてなされたものであり、球状体の搭載位置と目標搭載位置との位置ずれによる不良品の発生を低減し得る球状体搭載装置および球状体搭載方法を提供することを主目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成すべく請求項1記載の球状体搭載装置は、球状体を吸着する吸着ヘッドと、搭載対象体を支持すると共に支持状態の当該搭載対象体の位置を変更可能に構成された支持部と、前記球状体を吸着している前記吸着ヘッドを移動させて前記搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行する搭載部と、前記支持部および前記搭載部を制御する制御部と、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する検査部とを備えた球状体搭載装置であって、前記制御部は、前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する。
【0008】
また、請求項2記載の球状体搭載装置は、請求項1記載の球状体搭載装置において、前記制御部は、複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する。
【0009】
また、請求項3記載の球状体搭載装置は、請求項2記載の球状体搭載装置において、前記制御部は、前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する。
【0010】
また、請求項4記載の球状体搭載方法は、球状体を吸着している吸着ヘッドを移動させて支持状態の搭載対象体の位置を変更可能な支持部に支持されている当該搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行し、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する球状体搭載方法であって、前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する。
【0011】
また、請求項5記載の球状体搭載方法は、請求項4記載の球状体搭載方法において、複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する。
【0012】
また、請求項6記載の球状体搭載方法は、請求項5記載の球状体搭載方法において、前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する。
【発明の効果】
【0013】
請求項1記載の球状体搭載装置、および請求項4記載の球状体搭載方法では、良否検査に用いた撮像画像に基づいて補正値を特定すると共に、その良否検査の以後に実行する搭載処理において、支持部による搭載対象体の位置の変更量および搭載部による吸着ヘッドの移動距離の少なくとも一方を補正値に基づいて増減させて位置ずれを補正する。このため、この球状体搭載装置および球状体搭載方法によれば、良否検査の直前に実行した搭載処理において生じた位置ずれを良否検査以後に実行する搭載処理において補正することができるため、数多くの搭載対象体に対して搭載処理を連続して行う場合において、その位置ずれした状態が継続される事態を確実に防止することができる。したがって、この球状体搭載装置および球状体搭載方法によれば、球状体の搭載位置と目標搭載位置との位置ずれによる不良品の発生を十分に低減することができる。
【0014】
また、請求項2記載の球状体搭載装置、および請求項5記載の球状体搭載方法によれば、第1領域の中心位置、第2領域の中心位置、第3領域の中心位置、および第4領域の中心位置を算出すると共に、各中心位置に基づいて吸着ヘッドと搭載対象体との位置ずれ量を算出し、その位置ずれ量を補正値として特定することにより、例えば、球状体の搭載位置と目標搭載位置との位置ずれ量を各球状体(各目標搭載位置)毎に個別に求めて平均して吸着ヘッドと搭載対象体との位置ずれ量を算出する構成および方法と比較して算出手順を十分に簡略化することができるため、補正値を短時間でかつ正確に特定することができる。
【0015】
また、請求項3記載の球状体搭載装置、および請求項6記載の球状体搭載方法によれば、第1領域の中心位置と第3領域の中心位置とを結ぶ線分の中点の位置、および第2領域の中心位置と第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、各中点の位置に基づいて吸着ヘッドと搭載対象体との位置ずれ量を算出することにより、例えば、各中点の位置に基づいて座標変換を行うことで、位置ずれ量を容易に算出することができる。
【図面の簡単な説明】
【0016】
【図1】半田ボール搭載装置1の構成を示す構成図である。
【図2】半田ボール搭載装置1の平面図である。
【図3】基板400の平面図である。
【図4】吸着ヘッド11、供給部12およびプレート13の断面図である。
【図5】吸着ヘッド11に半田ボール300が吸着された状態を示す断面図である。
【図6】吸着部2の動作を説明する説明図である。
【図7】補正値特定処理を説明する第1の説明図である。
【図8】補正値特定処理を説明する第2の説明図である。
【発明を実施するための形態】
【0017】
以下、球状体搭載装置および球状体搭載方法の実施の形態について、添付図面を参照して説明する。
【0018】
最初に、図1に示す半田ボール搭載装置1の構成について説明する。半田ボール搭載装置1は、球状体搭載装置の一例であって、基板400(搭載対象体の一例:図3参照)の端子401(目標搭載位置の一例)に対して、直径L1(図5参照)が80μm程度の微細な半田ボール300(球状体の一例:同図参照)を搭載する搭載処理を実行可能に構成されている。また、半田ボール搭載装置1は、半田ボール300が搭載された基板400(図7参照:以下、「搭載済基板600」ともいう)の撮像画像に基づいて端子401に対する半田ボール300の搭載状態の良否検査を実行可能に構成されている。なお、半田ボール搭載装置1によって基板400の各端子401にそれぞれ搭載された半田ボール300は、加熱溶融されて、半球状の溶融体となった状態で各端子401に固着されてボールグリッドアレイ(BGA)を構成する。
【0019】
また、半田ボール搭載装置1は、図1に示すように、吸着部2、搭載部3、基板搬送部4、撮像部5および制御部6を備えて構成されている。
【0020】
吸着部2は、図1に示すように、吸着ヘッド11、供給部12、プレート13および吸気機構14を備えて構成されて半田ボール300を吸着する(後述する吸着処理を実行する)。
【0021】
吸着ヘッド11は、一例として、図4に示すように、内部空間21を有する中空の箱型に構成されている。また、図4,5に示すように、吸着ヘッド11の底面22には、半田ボール300を吸着するための複数の吸気口22aが形成されている。この場合、各吸気口22aは、直径L2(図5参照)が例えば40μm程度に規定され、基板400における各端子401の配列パターン(図3参照)と同じ配列パターンで底面22に形成されている。つまり、各吸気口22aによって吸着された各半田ボール300は、搭載処理の実行によって基板400における各端子401(目標搭載位置)に搭載される。
【0022】
また、図4に示すように、吸着ヘッド11の天面23には、内部空間21の空気を吸気するための吸気孔23aが形成されている。この吸着ヘッド11では、内部空間21の空気が吸気孔23aを介して吸気機構14によって吸気されて内部空間21が負圧状態となり、それに伴って吸気口22aからの吸気が行われることにより、吸気口22aに半田ボール300を吸着する(図6参照)。
【0023】
供給部12は、図4に示すように、収容容器31、保持部32および吸引部33を備えて、吸着ヘッド11に半田ボール300を供給可能に構成されている。収容容器31は、半田ボール300を収容する。保持部32は、吸気機構14に接続されており、収容容器31に収容されている半田ボール300を先端部(同図における下端部)で吸着して保持する。また、保持部32は、基端部(同図における上端部)を中心として回動可能に構成されている。吸引部33は、吸気機構14に接続されており、吸着ヘッド11に供給される半田ボール300のうちの余剰分を吸引して除去する。また、供給部12は、図外の駆動部を備えており、制御部6の制御に従い、収容容器31、保持部32および吸引部33(以下、この3つの構成要素をまとめて「供給部本体100」ともいう)を移動させる処理、並びに保持部32を回動させる処理を行う。
【0024】
プレート13は、図4に示すように、板状に構成され、吸着ヘッド11の底面22に近接(または接触)している状態(図5に示す状態)において吸着ヘッド11の吸気口22aに対向する位置に、半田ボール300が通過可能な(直径L4(同図参照)が95μm程度の)挿通孔13aが形成されている。このプレート13は、供給部12によって供給された半田ボール300を挿通孔13aに挿通させて吸着ヘッド11の吸気口22aに吸着させると共に、吸着ヘッド11による余剰な半田ボール300の吸着を規制する機能を有している。この場合、同図に示すように、プレート13の厚みL3は、吸気口22aに吸着された半田ボール300の端部が下面からやや突出する75μm程度に規定されている。
【0025】
吸気機構14は、吸気管24(図4参照)を介して吸着ヘッド11の吸気孔23aに接続されて、吸着ヘッド11における内部空間21の空気を吸引する。また、吸気機構14は、供給部12の保持部32および吸引部33に図外の吸気管を介して接続され、保持部32の先端部および吸引部33の先端部からの吸気を行う。この場合、吸気機構14は、複数の電磁バルブを備えており、内部空間21の空気の吸引、並びに保持部32および吸引部33からの吸気を個別に行うことが可能に構成されている。
【0026】
搭載部3は、図2に示すように、移動機構3aを備えて構成されている。移動機構3aは、同図に示す矢印Xの方向(以下、「X方向」ともいう)、同図に示す矢印Yの方向(以下、「Y方向」ともいう)、および上下方向(X方向およびY方向に直交する)に吸着部2の吸着ヘッド11を移動可能に構成されている。この搭載部3は、制御部6の制御に従い、吸着ヘッド11を吸着地点P3(吸着ヘッド11に半田ボール300を吸着させる位置であって、吸着部2におけるプレート13の配設位置:図2参照)に移動させる。また、搭載部3は、制御部6の制御に従い、半田ボール300を吸着している吸着ヘッド11を搭載地点P2(基板400に半田ボール300を搭載する位置:同図参照)に移動させて端子401に半田ボール300を搭載させる。
【0027】
基板搬送部4は、支持部に相当し、図2に示すように、ステージ4aおよび移動機構4bを備えて構成されている。ステージ4aは、搭載対象体としての基板400をその載置面(上面)に載置可能に構成されると共に、載置された基板400を例えば吸着することによって固定(支持)可能に構成されている。また、ステージ4aは、載置面に直交する軸を中心として回動する方向(以下、「θ方向」ともいう)に基板400の位置を変更(基板400をX−Y平面上で回動)させることが可能に構成されている。
【0028】
移動機構4bは、制御部6の制御に従い、図2に示す供給地点P1(基板400をステージ4aに供給(載置)する位置)と搭載地点P2との間で、同図に示す矢印Xの方向(X方向)にステージ4aを移動させる(基板400の位置を変更させる)。
【0029】
撮像部5は、図2に示すように、搭載地点P2の上方に配置されて、制御部6の制御に従い、搭載済基板600(半田ボール300が搭載された基板400)を撮像する。
【0030】
制御部6は、吸着部2、搭載部3、基板搬送部4および撮像部5を制御する。また、制御部6は、検査部として機能し、撮像部5によって撮像された搭載済基板600の撮像画像に基づいて目標搭載位置としての端子401に対する半田ボール300の搭載状態の良否検査を実行する。この場合、制御部6は、撮像画像に基づいて半田ボール300の搭載位置、および端子401の位置を測定し、測定した各位置から半田ボール300の搭載位置と端子401の位置との位置ずれ量を算出すると共に、その位置ずれ量が予め規定された規定値以下のときには、半田ボール300の搭載状態が良好と判定し、規定値を超えるときには、半田ボール300の搭載状態が不良と判定する。
【0031】
また、制御部6は、搭載済基板600の撮像画像に基づいて半田ボール300の搭載位置と目標搭載位置としての端子401の位置との位置ずれを補正するための補正値Rを特定する。さらに、制御部6は、基板搬送部4による基板400の位置の変更量、および搭載部3による吸着ヘッド11の移動距離の少なくとも一方(つまり、変更量のみ、移動距離のみ、並びに変更量および移動距離の双方のいずれか)を増減して全体として補正値R分を相殺して位置ずれを補正する。
【0032】
次に、半田ボール搭載装置1を用いて、半田ボール300を基板400の各端子401に搭載する球状体搭載方法について、図面を参照して説明する。
【0033】
この半田ボール搭載装置1では、搭載処理の開始が指示されたときに、図2に示すように、供給地点P1に位置している基板搬送部4におけるステージ4aの載置面に図外の供給装置が基板400を載置(供給)し、ステージ4aがその基板400を保持する。
【0034】
次いで、制御部6が搭載処理を開始する。この搭載処理では、制御部6が、基板搬送部4の移動機構4bを制御して、ステージ4aを供給地点P1から搭載地点P2に移動させる。続いて、制御部6は、搭載部3の移動機構3aを制御して、吸着部2の吸着ヘッド11を吸着地点P3(プレート13の配設位置)に搬送させ、図5に示すように、底面22とプレート13とを接触(近接)させる。なお、この時点では、半田ボール300は吸着されていない。
【0035】
次いで、制御部6は、吸着部2に吸着処理を実行させる。この吸着処理では、制御部6は、吸着部2における吸気機構14の電磁バルブを制御して、吸着ヘッド11の内部空間21の空気の吸引を開始させる。この際に、吸着ヘッド11の内部空間21が負圧状態となって吸気口22aからの吸気が開始される。
【0036】
また、制御部6は、吸気機構14を制御して、供給部12における保持部32の先端部、および供給部12における吸引部33の先端部からの吸気を開始させる。続いて、保持部32の先端部(図4における下端部)からの吸気に伴い、収容容器31に収容されている半田ボール300が保持部32の先端部に吸着されて保持される。次いで、制御部6は、供給部12における図外の駆動部を制御して、保持部32の基端部側(図6における下側)を中心として保持部32を回動させる。続いて、制御部6は、保持部32の先端部がプレート13に対向した時点で、供給部12の駆動部を制御して、保持部32の回動を停止させる。
【0037】
次いで、制御部6は、供給部12の駆動部を制御して、プレート13に向けて供給部本体100を移動させ、続いて、図6に示すように、保持部32の先端部をプレート13に近接させた状態を維持しつつ供給部本体100をプレート13に沿って同図に示す矢印の向きに移動させる。この際に、先端部に保持されている半田ボール300が、吸着ヘッド11における吸気口22aからの吸気に伴う吸引力によって引き寄せられて吸着ヘッド11に供給され、供給された半田ボール300がプレート13の各挿通孔13aを通って吸着ヘッド11の各吸気口22aに1つずつ吸着される。
【0038】
次いで、制御部6は、供給部12の駆動部を制御して、供給部本体100をプレート13に沿ってさらに移動させる。この際に、吸引部33が、プレート13に付着している余剰な半田ボール300を吸引して除去する。以上で、吸着処理が終了する。
【0039】
続いて、制御部6は、搭載部3の移動機構3aを制御して、吸着ヘッド11を搭載地点P2の上方に移動させた後に、吸着ヘッド11を下向きに移動させて、吸着ヘッド11によって吸着されている半田ボール300を、搭載地点P2に搬送されている基板400の搭載面(端子401が設けられている面)に近接(接触)させる。
【0040】
次いで、制御部6は、吸気機構14の電磁バルブを制御して、吸着ヘッド11の内部空間21からの空気の吸引(吸気口22aからの吸気)を停止させる。この際に、吸気口22aによる吸着が解除されて、図7に示すように、半田ボール300が基板400の端子401に搭載される。以上で搭載処理が終了する。続いて、制御部6は、搭載部3の移動機構3aを制御して、吸着ヘッド11を上方に向けて移動させた後に、初期位置に移動させる。
【0041】
次いで、制御部6は、良否検査および補正値特定処理を実行する。制御部6は、この良否検査において、撮像部5を制御して搭載済基板600(半田ボール300が搭載された基板400)を撮像させる。続いて、制御部6は、撮像部5によって撮像された撮像画像に基づき、各半田ボール300の搭載位置、および各端子401の位置を測定する。次いで、制御部6は、測定した各位置から半田ボール300の搭載位置と端子401の位置との位置ずれ量を算出する。続いて、制御部6は、算出した位置ずれ量が予め決められた基準値以下のときには、半田ボール300の搭載状態が良好と判定し、基準値を超えるときには、半田ボール300の搭載状態が不良と判定する。
【0042】
一方、制御部6は、半田ボール300の搭載位置と端子401の位置との位置ずれを補正するための補正値Rを一例として次の手順で特定する。なお、以下の説明に用いる図7,8では、半田ボール300と端子401との位置ずれを誇張して図示している。制御部6は、まず、基板400における各端子401の一部(一例として、図7における基板400の上部側に設けられている12個の端子401)の各位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各端子401を取り囲む(各端子401が含まれる)第1領域A1の中心位置Pc1(図8参照)を算出する。この場合、第1領域A1は、一例として、図7に示すように、各端子401(この例では、上記した12個の端子401)の外周に接する矩形(一例として長方形)の領域に規定されている。また、中心位置Pc1は、一例として、第1領域A1に2本の対角線を描き、各対角線の交点の位置を求めることで算出される。
【0043】
続いて、制御部6は、第1領域A1内の各端子401に搭載された半田ボール300の搭載位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各搭載位置を取り囲む(各搭載位置が含まれる)第2領域A2の中心位置Pc2(図8参照)を算出する。この場合、第2領域A2は、一例として、図7に示すように、第1領域A1内の各端子401に搭載された各半田ボール300の外周に接する矩形(一例として長方形)の領域に規定されている。また、中心位置Pc2は、一例として、第2領域A2に2本の対角線を描き、各対角線の交点の位置を求めることで算出される。
【0044】
続いて、制御部6は、第1領域A1内の端子401とは異なる複数の端子401(一例として、図7における基板400の下部側に設けられている20個の端子401)の各位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各端子401を取り囲む(各端子401が含まれる)第3領域A3の中心位置Pc3(図8参照)を算出する。続いて、制御部6は、第3領域A3内の各端子401に搭載された半田ボール300の搭載位置を撮像画像に基づいて特定する。次いで、特定した各位置から、これらの各搭載位置を取り囲む(各搭載位置が含まれる)第4領域A4の中心位置Pc4(同図参照)を算出する。この場合、第3領域A3は、上記した第1領域A1と同様に各端子401の外周に接する矩形(一例として長方形)の領域に規定され、第4領域A4は、上記した第2領域A2と同様に各半田ボール300の外周に接する矩形(一例として長方形)の領域に規定されている。また、中心位置Pc3,Pc4は、上記した中心位置Pc1,Pc2と同様の手法で算出される。
【0045】
続いて、制御部6は、図8に示すように、第1領域A1の中心位置Pc1と第3領域A3の中心位置Pc3とを結ぶ線分Ls1の中点O1の位置(座標)を算出すると共に、第2領域A2の中心位置Pc2と第4領域A4の中心位置Pc4とを結ぶ線分Ls2の中点O2の位置(座標)を算出する。また、線分Ls1と線分Ls2とのなす角度θを算出する。次いで、制御部6は、中点O1の位置および中点O2の位置、並びに角度θに基づき、吸着ヘッド11(吸着ヘッド11の底面22全体)と基板400(基板400の搭載面全体)との位置ずれ量Gを算出する。
【0046】
ここで、中点O1の座標を(XO1,YO1)とし、中点O2の座標を(XO2,YO2)として、Ls2を角度θだけ回動させて、線分Ls1とLs2とを平行状態としたときの中点O2の新たな座標(XO2θ,YO2θ)を求める。つまり、中点O2の座標を中点O1の座標系に座標変換(回転変換)したときの新たな座標(XO2θ,YO2θ)を求める。この場合、座標変換の公式より、XO2θおよびYO2θは、次の(1)式および(2)式で与えられる。
XO2θ=XO2cosθ−YO2sinθ・・・(1)式
YO2θ=XO2sinθ+YO2cosθ・・・(2)式
続いて、中点O1と変換後の中点O2との間のX方向に沿った離間距離(XO1−XO2θ)、つまり、位置ずれ量GのX方向成分(ΔX)を上記(1)式を用いた次の(3)式から算出する。
ΔX=XO1−XO2θ=XO1−(XO2cosθ−YO2sinθ)・・・(3)式
また、中点O1と変換後の中点O2との間のY方向に沿った離間距離(YO1−YO2θ)、つまり位置ずれ量GのY方向成分(ΔY)を上記(2)式を用いた次の(4)式から算出する。
ΔY=YO1−YO2θ=YO1−(XO2sinθ+YO2cosθ)・・・(4)式
以上により、位置ずれ量GのX方向成分、Y方向成分およびθ方向成分が算出され、制御部6は、この位置ずれ量Gを補正値Rとして特定する。
【0047】
次いで、良否検査が終了した搭載済基板600を図外の取り出し装置がステージ4aから取り出す。続いて、制御部6は、基板搬送部4の移動機構4bを制御してステージ4aを搭載地点P2から供給地点P1に移動させる。次いで、図外の供給装置が新たな基板400をステージ4aの載置面に載置し、ステージ4aがその基板400を保持する。
【0048】
続いて、制御部6は上記した搭載処理を実行する。この際に、制御部6は、補正値Rに基づく補正処理を実行する。ここで、この補正値Rに対応する上記した位置ずれ量Gは、主として、搭載部3における移動機構3aの機械精度や基板400の寸法精度に起因するものであり、移動機構3aを制御して吸着ヘッド11を移動させる際に指定する移動距離を補正値RのX方向成分およびY方向成分の値(または、Y方向成分の値)だけ増減させ、かつ基板搬送部4を制御して基板400の位置を変更させる際の変更量を補正値Rのθ方向成分の値(または、X方向成分およびθ方向成分の値)だけ増減させることで、上記した中心位置Pc1,Pc2が一致すると共に中心位置Pc3,Pc4が一致して(中点O1,O2も一致する)位置ずれ量Gが相殺され、これによって位置ずれが補正される。
【0049】
この例では、制御部6は、基板搬送部4を制御して供給地点P1から搭載地点P2に基板400の位置を変更させる(基板400を移動させる)際の変更量を補正値Rのθ方向成分の値だけ増減させ移動(回動)させ、移動機構3aを制御して半田ボール300を吸着している吸着ヘッド11を吸着地点P3から搭載地点P2に移動させる際に指定する移動距離を補正値RのX方向成分およびY方向成分の値だけ増減させる。
【0050】
次いで、制御部6は、搭載部3の移動機構3aを制御して、吸着ヘッド11によって吸着されている半田ボール300を、基板400の搭載面に近接(接触)させ、続いて、吸気機構14の電磁バルブを制御して、吸着ヘッド11における吸気口22aからの吸気を停止させる。これにより、半田ボール300が基板400における端子401に搭載され、搭載処理が終了する。この場合、この半田ボール搭載装置1では、良否検査において用いた搭載済基板600の撮像画像に基づいて特定した補正値R、つまり、良否検査の直前に実行した搭載処理において生じた位置ずれ量Gに相当する補正値Rを特定して、良否検査の以後に実行する搭載処理において、その補正値Rを用いた補正処理を行う。このため、この半田ボール搭載装置1では、良否検査の直前の搭載処理において生じた位置ずれが、良否検査以後の搭載処理において確実に補正されるため、数多くの基板400に対して搭載処理を連続して行う場合において、その位置ずれした状態が継続される事態が確実に防止される結果、半田ボール300の搭載位置と端子401との位置ずれによる不良品の発生を十分に低減することが可能となっている。
【0051】
次いで、制御部6は、移動機構3aを制御して、吸着ヘッド11を初期位置に移動させた後に、上記した良否検査および補正値特定処理を実行する。以後、制御部6は、新たな基板400に対する搭載処理の実行時に、その以前(この例では直前)の補正値特定処理によって特定した補正値Rに基づく補正処理を実行する。
【0052】
このように、この半田ボール搭載装置1および球状体搭載方法では、良否検査に用いた撮像画像に基づいて半田ボール300の搭載位置と端子401との位置ずれを補正するための補正値Rを特定すると共に、その良否検査の以後に実行する搭載処理において、基板搬送部4による基板400の位置の変更量および搭載部3による吸着ヘッド11の移動距離を補正値Rに基づいて増減させて位置ずれを補正する。このため、この半田ボール搭載装置1および球状体搭載方法によれば、良否検査の直前に実行した搭載処理において生じた位置ずれを良否検査以後に実行する搭載処理において補正することができるため、数多くの基板400に対して搭載処理を連続して行う場合において、その位置ずれした状態が継続される事態を確実に防止することができる。したがって、この半田ボール搭載装置1および球状体搭載方法によれば、半田ボール300の搭載位置と端子401との位置ずれによる不良品の発生を十分に低減することができる。
【0053】
また、この半田ボール搭載装置1および球状体搭載方法によれば、第1領域A1の中心位置Pc1、第2領域A2の中心位置Pc2、第3領域A3の中心位置Pc3、および第4領域A4の中心位置Pc4を算出すると共に、各中心位置Pc1〜Pc4に基づいて吸着ヘッド11の底面22全体と基板400の搭載面全体との位置ずれ量Gを算出し、その位置ずれ量Gを補正値Rとして特定することにより、例えば、半田ボール300の搭載位置と端子401との位置ずれ量を各半田ボール300(各端子401)毎に個別に求めて平均して位置ずれ量Gを算出する構成および方法と比較して算出手順を十分に簡略化することができるため、補正値Rを短時間でかつ正確に特定することができる。
【0054】
また、この半田ボール搭載装置1および球状体搭載方法によれば、第1領域A1の中心位置Pc1と第3領域A3の中心位置Pc3とを結ぶ線分Ls1の中点O1の位置、および第2領域A2の中心位置Pc2と第4領域A4の中心位置Pc4とを結ぶ線分Ls2の中点O2の位置を算出すると共に、各中点O1,O2の位置に基づいて位置ずれ量Gを算出することにより、例えば、中点O1,O2の位置に基づいて座標変換を行うことで、位置ずれ量Gを容易に算出することができる。
【0055】
なお、球状体搭載装置および球状体搭載方法は、上記の構成および方法に限定されない。例えば、良否検査を1回実行する毎に補正処理を実行する構成および方法について上記したが、良否検査において算出した位置ずれ量Gが、予め規定された規定値(上記した不良と判定する規定値よりも小さい規定値)以上となったときに補正処理を実行する構成および方法を採用することもできる。また、良否検査を複数回実行する毎に1回の補正処理を実行する構成および方法を採用することもできる。
【0056】
また、上記の半田ボール搭載装置1では、基板搬送部4のステージ4aがX方向にのみ移動可能に構成されているが、X方向およびY方向の双方にステージ4aを移動可能に構成した基板搬送部を採用することもできる。この構成を採用したときには、基板搬送部4による基板400の位置の変更量を補正値RのY方向成分を増減することで、位置ずれのY方向成分を補正することができる。また、上記の例では、基板搬送部4による基板400の位置の変更量を補正値Rのθ方向成分の値だけ増減させたが、これに加えて、補正値RのX方向成分についても変更量を増減させることもできる。
【0057】
また、補正値Rにθ方向成分が含まれていないときには、搭載部3による吸着ヘッド11の移動距離のみ補正値RのX方向成分およびY方向成分の値だけ増減させることができる。また、補正値RにX方向成分およびY方向成分が含まれていないときには、基板搬送部4による基板400の位置の変更量のみ補正値Rのθ方向成分の値だけ増減させることができる。
【符号の説明】
【0058】
1 半田ボール搭載装置
2 吸着部
3 搭載部
3a 移動機構
4 基板搬送部
4a ステージ
4b 移動機構
5 撮像部
6 制御部
11 吸着ヘッド
300 半田ボール
400 基板
401 端子
A1 第1領域
A2 第2領域
A3 第3領域
A4 第4領域
Ls1,Ls2 線分
O1,O2 中点
Pc1〜Pc4 中心位置
【特許請求の範囲】
【請求項1】
球状体を吸着する吸着ヘッドと、搭載対象体を支持すると共に支持状態の当該搭載対象体の位置を変更可能に構成された支持部と、前記球状体を吸着している前記吸着ヘッドを移動させて前記搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行する搭載部と、前記支持部および前記搭載部を制御する制御部と、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する検査部とを備えた球状体搭載装置であって、
前記制御部は、前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する球状体搭載装置。
【請求項2】
前記制御部は、複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する請求項1記載の球状体搭載装置。
【請求項3】
前記制御部は、前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する請求項2記載の球状体搭載装置。
【請求項4】
球状体を吸着している吸着ヘッドを移動させて支持状態の搭載対象体の位置を変更可能な支持部に支持されている当該搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行し、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する球状体搭載方法であって、
前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する球状体搭載方法。
【請求項5】
複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する請求項4記載の球状体搭載方法。
【請求項6】
前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する請求項5記載の球状体搭載方法。
【請求項1】
球状体を吸着する吸着ヘッドと、搭載対象体を支持すると共に支持状態の当該搭載対象体の位置を変更可能に構成された支持部と、前記球状体を吸着している前記吸着ヘッドを移動させて前記搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行する搭載部と、前記支持部および前記搭載部を制御する制御部と、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する検査部とを備えた球状体搭載装置であって、
前記制御部は、前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する球状体搭載装置。
【請求項2】
前記制御部は、複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する請求項1記載の球状体搭載装置。
【請求項3】
前記制御部は、前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する請求項2記載の球状体搭載装置。
【請求項4】
球状体を吸着している吸着ヘッドを移動させて支持状態の搭載対象体の位置を変更可能な支持部に支持されている当該搭載対象体の目標搭載位置に前記球状体を搭載する搭載処理を実行し、前記球状体が搭載された前記搭載対象体の撮像画像に基づいて当該球状体の搭載状態の良否検査を実行する球状体搭載方法であって、
前記良否検査に用いた前記撮像画像に基づいて前記球状体の搭載位置と前記目標搭載位置との位置ずれを補正するための補正値を特定すると共に、当該良否検査の以後に実行する前記搭載処理において、前記支持部による前記搭載対象体の位置の変更量および前記搭載部による前記吸着ヘッドの移動距離の少なくとも一方を前記補正値に基づいて増減させて前記位置ずれを補正する球状体搭載方法。
【請求項5】
複数の前記目標搭載位置を取り囲む第1領域の中心位置、前記第1領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第2領域の中心位置、前記第1領域内の前記各目標搭載位置とは異なる複数の目標搭載位置を取り囲む第3領域の中心位置、および前記第3領域内の前記各目標搭載位置にそれぞれ搭載された前記各球状体の搭載位置を取り囲む第4領域の中心位置を算出すると共に、前記各中心位置に基づいて前記吸着ヘッドと搭載対象体との位置ずれ量を算出し、当該位置ずれ量を前記補正値として特定する請求項4記載の球状体搭載方法。
【請求項6】
前記第1領域の中心位置と前記第3領域の中心位置とを結ぶ線分の中点の位置、および前記第2領域の中心位置と前記第4領域の中心位置とを結ぶ線分の中点の位置を算出すると共に、前記各中点の位置に基づいて前記位置ずれ量を算出する請求項5記載の球状体搭載方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−98474(P2013−98474A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−242282(P2011−242282)
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000227180)日置電機株式会社 (982)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000227180)日置電機株式会社 (982)
【Fターム(参考)】
[ Back to top ]