
球状表面弾性波素子の複数周波数駆動計測装置
【課題】
高速に駆動周波数を変更することおよび、複数の周波数を同時に出力することを可能とする。
【解決手段】
球状表面弾性波素子に複数の周波数で駆動信号を印加するための駆動系回路と、
前記球状表面弾性波素子から出力される複数の周波数の周回受信信号を計測するため計測系回路と、
で構成される球状表面弾性波素子の複数周波数駆動計測装置であって、
前記駆動系回路および前記計測系回路から前記球状表面弾性波素子の間に、前記複数の周波数でそれぞれ共振する複数個の直列共振回路および、複数個の並列共振回路を備えたことを特徴とする球状表面弾性波素子の複数周波数駆動計測装置を提供する。
高速に駆動周波数を変更することおよび、複数の周波数を同時に出力することを可能とする。
【解決手段】
球状表面弾性波素子に複数の周波数で駆動信号を印加するための駆動系回路と、
前記球状表面弾性波素子から出力される複数の周波数の周回受信信号を計測するため計測系回路と、
で構成される球状表面弾性波素子の複数周波数駆動計測装置であって、
前記駆動系回路および前記計測系回路から前記球状表面弾性波素子の間に、前記複数の周波数でそれぞれ共振する複数個の直列共振回路および、複数個の並列共振回路を備えたことを特徴とする球状表面弾性波素子の複数周波数駆動計測装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、球状表面弾性波素子の駆動および周回受信信号の計測装置に係り、特に複数の周波数による球状表面弾性波素子の駆動計測装置に関する。
【背景技術】
【0002】
近年、平板形状ではなく、球形状の圧電性結晶基材の表面にすだれ状電極が形成された球状表面弾性波素子が知られている(例えば、特許文献1参照)。
【0003】
この球状表面弾性波素子は、駆動信号として高周波バースト信号がすだれ状電極に印加されると、すだれ状電極から表面弾性波(Surface Acoustic Wave)が励起され、表面弾性波が基材表面の円環状領域を多重に周回する。
【0004】
ここで、表面弾性波は、基材表面の状態に応じて多重周回する速度が変化する。同様に、表面弾性波は、基材表面への分子の付着等により、円環状領域の周長が表面弾性波の波長の整数倍となるとき、共鳴周波数が変化する。
【0005】
このため、球状表面弾性波素子は、基材表面の円環状領域に付着した分子や、円環状領域に成膜された反応膜と環境ガス等との反応を検出する等の用途が提案されている。
【0006】
駆動信号として球状表面弾性波素子に印加する高周波バースト信号の周波数は、球状表面弾性波素子上のすだれ状電極の形状や、基材表面の付着物や円環状領域に成膜された反応膜等で決まり複数の周波数で駆動計測する場合がある。
【0007】
特許文献等は以下の通りである。
【特許文献1】国際公開第WO 01/45255号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、駆動系回路および計測系回路と球状表面弾性波素子の間には信号伝達を効率よく行うためのインピーダンスマッチング回路が必要であるが、前記インピーダンスマッチング回路は、周波数によって回路定数が決まっている。
【0009】
従って、複数の周波数で駆動する場合、おのおのの周波数にあわせた複数個のインピーダンスマッチング回路を駆動周波数に応じて切り替える手段か、インピーダンスマッチング回路定数を変更する手段をもって駆動計測を行う必要がある。
【0010】
インピーダンスマッチング回路の切り替え手段、もしくはインピーダンスマッチング回路定数を変更する手段としては、切り替え時間が十分遅い場合、機械接点を持ったスイッチを手動で切り替えてもよいし、電磁リレーで機械接点を電気的に切り替えてもよいが数mS以下での高速スイッチングはできない。
【0011】
しかしながら、高精度計測においてはドリフトの問題から駆動周波数を高速に切り替える必要がある。電子スイッチや、フォトモスリレーを用いれば高速スイッチングは可能であるが、球状表面弾性波素子の駆動周波数が10MHzを越える高周波である場合、スイッチ素子の持つ静電容量の影響で、回路上は遮断状態にしても駆動信号および周回受信信号が漏洩してしまう問題があり高周波の複数の駆動周波数を高速に切り替えることは困難である。
【0012】
さらに、計測精度を向上するために複数の周波数を切り替えるのではなく合成して同時に出力する方法も考えられているが、スイッチによる切り替え方式では実現不可能である。
【0013】
本発明は、上記事情を考慮してなされたもので、複数の周波数で球状表面弾性波素子を駆動計測する装置において、高速に駆動周波数を変更することおよび、複数の周波数を同時に出力することを可能とする、球状表面弾性波素子の複数周波数駆動計測装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
請求項1に対応する発明は、球状表面弾性波素子に複数の周波数で駆動信号を印加するための駆動系回路と、前記球状表面弾性波素子から出力される複数の周波数の周回受信信号を計測するため計測系回路と、で構成される球状表面弾性波素子の複数周波数駆動計測装置であって、前記駆動系回路および前記計測系回路から前記球状表面弾性波素子の間に、前記複数の周波数でそれぞれ共振する複数個の直列共振回路および、複数個の並列共振回路を備えたことを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0015】
請求項2に対応する発明は、請求項1の球状表面弾性波素子の複数周波数駆動計測装置において、駆動計測する複数の周波数がそれぞれ少なくとも1.3倍以上離れていることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0016】
請求項3に対応する発明は、請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、駆動計測する複数周波数の駆動信号は同時には一つの周波数を出力し、これを順次切り替えることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0017】
請求項4に対応する発明は、請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、駆動計測する複数周波数の駆動信号は、同時に複数周波数の合成駆動信号を出力することを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0018】
請求項5に対応する発明は、請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、同一経路に印加するための駆動系回路であり、出計測系回路がその同一経路の周回受信信号を計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0019】
請求項6に対応する発明は、請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、周波数毎に異なる経路に印加するための駆動系回路であり、出計測系回路がその周波数毎に異なる経路の周回受信信号を各々計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0020】
従って、請求項1から6に対応する発明は、たとえば、2つの周波数で球状表面弾性波素子を駆動計測する場合、第1周波数をf1とし、第2周波数をf2として(ただしf1<1.3×f2またはf1>1.3×f2)、駆動系回路および計測系回路から前記表面弾性波素子の間に、f1で共振状態となる直列共振回路とf1で共振状態となる並列共振回路とをコイルで結合させた回路および、f2で共振状態となる直列共振回路と、f2で共振状態となる並列共振回路とをコイルで結合させた回路を並列に構成する。
【0021】
なお、f1で共振する前記並列共振回路および、f2で共振する前記並列共振回路は前記球状表面弾性波素子に対するインピーダンスマッチング回路を兼ねている。
【0022】
これにより、f1で共振状態となる前記直列共振回路とf2で共振状態となる前記直列共振回路とにより、通過する周波数の選択性をもたせ、通過した周波数に適したインピーダンスマッチング回路へ駆動計測信号を伝達することができる。
【0023】
また、インピーダンスマッチング回路がf1で共振する前記並列共振回路およびf2で共振状態となる前記並列共振回路で構成されているため、インピーダンスマッチングに適合しない周波数に対しては、インピーダンスマッチングに適合する側の並列共振回路のインピーダンスが無限大に近い値となることに比べ十分インピーダンスが低くなり、電気的にはその存在を無視できるようになる。
【0024】
このことは、駆動計測する周波数に適合したインピーダンスマッチング回路が受動的に自動選択されることを示している。
【0025】
これにより、複数の周波数で球状表面弾性波素子を駆動および計測する装置において、前記複数の周波数にそれぞれ適合する複数個のインピーダンスマッチング回路をスイッチ等により切り替える必要が無くなった。
【発明の効果】
【0026】
以上説明したように、本発明によれば、複数の周波数で球状表面弾性波素子を駆動計測する装置において、高速に駆動計測周波数を変更することおよび、複数の駆動周波数を合成し同時に出力することが可能となった。
【発明を実施するための最良の形態】
【0027】
以下、本発明の各実施形態について図面を参照しながら説明する。
【0028】
<第1の実施形態>
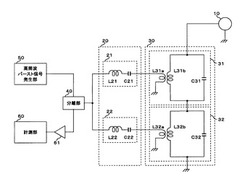
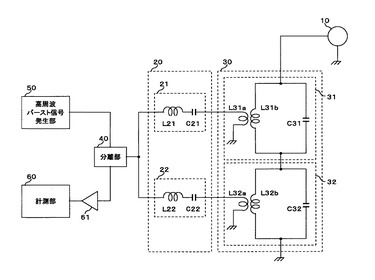
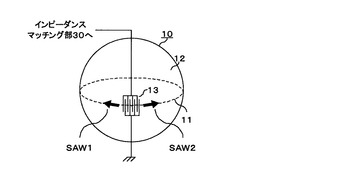
図1は本発明の第1の実施形態にかかる球状表面弾性波素子の複数周波数駆動計測装置の構成を示す模式図であり、図2はこの球状表面弾性波素子の構成を示す模式図である。
【0029】
この複数周波数駆動計測装置は、球状表面弾性波素子10、周波数選択部20、インピーダンスマッチング部30、分離部40、高周波バースト信号発生部50、計測部60を備えている。
【0030】
ここで、球状表面弾性波素子10は、伝搬面11を有する球状部材12およびすだれ状電極13を備えている。伝搬面11は、連続した曲面からなる円環状の表面を有し、この円環状の表面の少なくとも一部に、すだれ状電極13により励起される互いに逆方向に伝搬する表面弾性波SAW1、SAW2を周回させるための周回経路を備えている。球状部材12は、一旦励起された表面弾性波が多重周回可能な伝搬面11を有する三次元基体であり、本実施形態では、直径10mmの球状に加工された単結晶の水晶材料を用いている。
【0031】
周波数選択部20は、コイルとコンデンサを直列に接続した直列共振回路となっており、高周波バースト信号発生部50からの駆動信号もしくは、球状表面弾性波素子10からの受信周回信号を周波数選択性を持たせて通過させるものである。
【0032】
インピーダンスマッチング部30は、コイルとコンデンサを並列に接続した並列共振回
路となっており、高周波バースト信号発生部50からの駆動系回路および計測部60と球状表面弾性波素子10とのインピーダンスマッチングを周波数選択性を持って行うものである。
【0033】
分離部40は、高周波バースト信号発生部50からの駆動信号を計測部60へ流さないように、また周回受信信号を高周波バースト信号発生部50へ流さないようにするものである。
【0034】
高周波バースト信号発生部50は、任意周波数のバースト信号を断続的に発生させ、これを駆動信号として球状表面弾性波素子10のすだれ状電極13に印加するものである。
【0035】
計測部60は、すだれ状電極13から出力された多重周回中の表面弾性波SAW1、SAW2の検出信号を増幅器61で増幅し検出信号の強度を計測するものである。
【0036】
次に、以上のように構成された前記球状表面弾性波素子の複数周波数駆動計測装置の動作を詳細に説明する。
【0037】
本実施形態では、複数周波数を第1周波数f1および、第2周波数f2(ただしf1<1.3×f2またはf1>1.3×f2)の2つの周波数としている。
【0038】
なぜ1.3以上が好ましいかというと、異なる周波数による差異を検出することで高精度な計測ができることが近い周波数ではそのメリットが活かせない、つまり、差異があまり出ないからである。
【0039】
また、本方式では電気的特性から、1.3倍以下の周波数の切り分けが困難だらである。理論的には切り分けが可能だが、実際はQ(共振の良さ)が有限で経験上1.3倍以上離れていないと本方式を有効に利用することができないからである。
【0040】
高周波バースト信号発生部50は、第1周波数f1および、第2周波数f2のバースト信号を交互に断続的に発生させる。
【0041】
周波数選択部20は、通過周波数をf1とした周波数選択回路21と通過周波数をf2とした周波数選択回路22とが並列に接続されている。
【0042】
周波数選択回路21はコイルL21とコンデンサC21が直列に接続された直列共振回路を形成しており、周波数f1で共振するようになっている。
【0043】
周波数選択回路22はコイルL22とコンデンサC22が直列に接続された直列共振回路を形成しており、周波数f2で共振するようになっている。
【0044】
ここで高周波バースト信号発生部50から周波数f1のバースト信号が出力されたとする。
【0045】
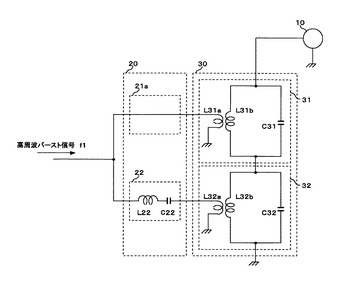
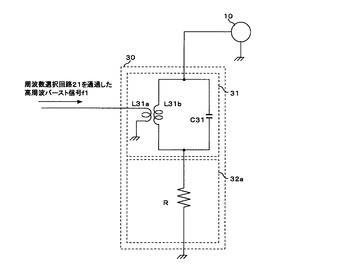
周波数f1のバースト信号は周波数選択回路21、周波数選択回路22にそれぞれに印加されるが、周波数選択回路21は周波数f1で直列共振するのでインピーダンスはほぼ零になる(理論的には直列共振回路における共振状態ではインピーダンスは零となるが、現実的にはコイルの純抵抗成分が残るためわずかにインピーダンスを持つ)のに対し、周波数選択回路22は、共振状態とならないのでインピーダンスを持つ。図3はこの状態を等価的に表したもので直列共振状態である周波数選択回路21はインピーダンスほぼ零の短絡状態21aとなる、言い換えれば単なる電線に等価となる。このため高周波バースト
信号発生部50から出力された周波数f1のバースト信号は、そのほとんどが周波数選択回路21を通ることになる。
【0046】
次に周波数選択回路21を通った周波数f1のバースト信号は、インピーダンスマッチング部30へ印加される。
【0047】
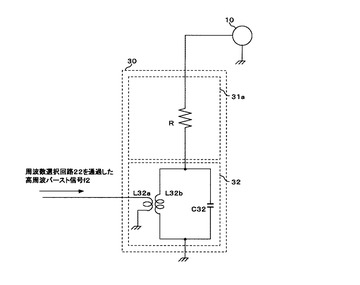
インピーダンスマッチング部30は、共振周波数をf1としたインピーダンスマッチング回路31と共振周波数をf2としたインピーダンスマッチング回路32とが直列に接続されている。
【0048】
インピーダンスマッチング回路31は、二次コイルL31aおよび二次コイルL31aとトランスを構成するコイルL31bとコンデンサC31が並列に接続された並列共振回路を形成しており、周波数f1で共振するようになっている。
【0049】
インピーダンスマッチング回路32は、二次コイルL32aおよび二次コイルL32aとトランスを構成するコイルL32bとコンデンサC32が並列に接続された並列共振回路を形成しており、周波数f2で共振するようになっている。
【0050】
ここで、球状表面弾性波素子に対するインピーダンスマッチングについて補足説明をする。
【0051】
本実施形態で使用した球状表面弾性波素子10は動作インピーダンスが非常に高いのに対し、高周波電子機器、たとえば本実施形態で使用した高周波バースト信号発生部50や計測部60などは、入出力インピーダンスは一般的に50Ωとなっている。また図示していない接続用高周波同軸ケーブルも特性インピーダンスは50Ωである。このように50Ω系の回路に動作インピーダンスが非常に高い球状表面弾性波素子10を直接接続するとエネルギーロスが大きく効率よく球状表面弾性波素子10を駆動することができない。
【0052】
したがって、インピーダンスマッチング回路を高周波バースト信号発生部50および計測部60と球状表面弾性波素子10の間に挿入することにより、球状表面弾性波素子10の動作インピーダンスを50Ωもしくはその近傍の低いインピーダンスに変換し、エネルギーロスを抑え効率よく球状表面弾性波素子10を駆動することができる状態にしている。
【0053】
具体的には、インピーダンスマッチング回路は、コイルL31bとコンデンサC31による並列共振回路もしくは、コイルL32bとコンデンサC32による並列共振回路で構成し、並列共振状態となったとき球状表面弾性波素子10からみたインピーダンスマッチング回路は非常に高いインピーダンスとなり、動作インピーダンスが非常に高い球状表面弾性波素子10とインピーダンスマッチングがとれる。
【0054】
一方、インピーダンスマッチング用コイルL31bにトランスを構成するように二次コイルL31aを設け、二次コイルL31aの一端を接地し、他端を高周波バースト信号発生部50および計測部60へ接続して、高周波バースト信号発生部50および計測部60からみたインピーダンスマッチング回路のインピーダンスが、50Ωになるようにしてある。また、二次コイルL31aの巻き数は、インピーダンスマッチング用コイルL32bの巻き数より格段に少ない値である。
【0055】
このように、本実施形態における、インピーダンスマッチング回路は、共振状態となったとき、高周波バースト信号発生部50および計測部60と球状表面弾性波素子10のインピーダンスマッチングがとれるものである。
【0056】
周波数選択回路21を通った周波数f1のバースト信号は、共振周波数をf1としたインピーダンスマッチング回路31で並列共振状態となり、インピーダンスマッチング回路31のインピーダンスが非常に高くなり(理論的には並列共振回路における共振状態ではインピーダンスは無限大となるが、現実的にはコイルの純抵抗成分が残るため無限大とはならない)、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0057】
一方、周波数選択回路21を通った周波数f1のバースト信号は、インピーダンスマッチング回路31と直列に接続されている共振周波数をf2としたインピーダンスマッチング回路32にも流れるが、インピーダンスマッチング回路32は並列共振状態とはならないので、並列共振状態にあるインピーダンスマッチング回路31の非常に高いインピーダンスと比べ十分低い値となる。図4はこの状態を等価的に表したもので、インピーダンスマッチング回路31は、十分低い抵抗32aを介して接地されていると見なすことができる。
【0058】
この結果、周波数f1のバースト信号は、周波数f1に最適なインピーダンスマッチング回路31を介してインピーダンスマッチングが行われ、球状表面弾性波素子10へ駆動信号を印加する事ができる。
【0059】
次に、すだれ状電極13は、周波数f1のバースト信号の印加により、球状部材12の表面に互いに逆方向に伝搬する弾性表面波SAW1,SAW2を励起し、表面に沿い伝搬させると共に、伝搬した表面弾性波SAW1,SAW2の図示していない合成波SAWを受信して周回受信信号を励起出力可能とする。この弾性表面波SAW1,SAW2は、すだれ状電極13を通過しながら球状部材12の表面を多重周回する。
【0060】
周波数f1のバースト信号の印加終了後、すだれ状電極13は、励起した周回受信信号を出力する。前記周回受信信号は印加されたバースト信号と同じ周波数で返される。したがって前記周回受信信号の周波数はf1である。
【0061】
前記周回受信信号は、前記動作原理に基づきインピーダンスマッチング回路31および周波数選択回路21を通り、分離部40を経て増幅器61で検出信号を増幅し計測部60へ入力される。
【0062】
次に、高周波バースト信号発生部50から周波数f2のバースト信号が出力されたとする。
【0063】
周波数f2のバースト信号は周波数選択回路21、周波数選択回路22にそれぞれに印加されるが、周波数選択回路22は周波数f2で直列共振するのでインピーダンスはほぼ零になるのに対し、周波数選択回路21は、共振状態とならないのでインピーダンスを持つ。図5はこの状態を等価的に表したもので直列共振状態である周波数選択回路22はインピーダンスほぼ零の短絡状態22aとなる。このため高周波バースト信号発生部50から出力された周波数f2のバースト信号は、そのほとんどが周波数選択回路22を通ることになる。
【0064】
次に周波数選択回路22を通った周波数f2のバースト信号は、インピーダンスマッチング部30へ印加され共振周波数をf2としたインピーダンスマッチング回路32で並列共振状態となり、インピーダンスマッチング回路32のインピーダンスが非常に高くなり、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0065】
一方、周波数選択回路22を通った周波数f2のバースト信号は、インピーダンスマッチング回路32と直列に接続されている共振周波数をf1としたインピーダンスマッチング回路31にも流れるが、インピーダンスマッチング回路31は並列共振状態とはならないので、並列共振状態にあるインピーダンスマッチング回路32の非常に高いインピーダンスと比べ十分低い値となる。図6はこの状態を等価的に表したもので、インピーダンスマッチング回路32は、十分低い抵抗31aを介して球状表面弾性波素子10へ接続されていると見なすことができる。
【0066】
この結果、周波数f2のバースト信号は、周波数f2に最適なインピーダンスマッチング回路32を介してインピーダンスマッチングが行われ、球状表面弾性波素子10へ駆動信号を印加する事ができる。
【0067】
次に、すだれ状電極13は、周波数f2のバースト信号の印加により、球状部材12の表面に互いに逆方向に伝搬する弾性表面波SAW1,SAW2を励起し、表面に沿い伝搬させると共に、伝搬した表面弾性波SAW1,SAW2の合成波SAWを受信して周回受信信号を励起出力可能とする。この弾性表面波SAW1,SAW2は、すだれ状電極13を通過しながら球状部材12の表面を多重周回する。
【0068】
周波数f2のバースト信号の印加終了後、すだれ状電極13は、励起した周回受信信号を出力する。前記周回受信信号は印加されたバースト信号と同じ周波数で返される。したがって前記周回受信信号の周波数はf2である。
【0069】
前記周回受信信号は、前記動作原理に基づきインピーダンスマッチング回路32および周波数選択回路22を通り、分離部40を経て増幅器61で検出信号を増幅し計測部60へ入力される。
【0070】
上述したように、本実施形態によれば、高周波バースト信号発生部50より出力された高周波バースト信号は、その周波数に適合したマッチング回路が受動的に自動選択されてインピーダンスマッチングが行われ、球状表面弾性波素子10を駆動する。
【0071】
球状表面弾性波素子10より出力される周回受信信号は、その周波数に適合したインピーダンスマッチング回路を受動的に自動選択し、インピーダンスマッチングを行い計測部60へ入力される。
【0072】
以上の説明は、周回経路が単一経路の場合で説明したが、この周波数毎に異なる経路に信号を印加し、計測するものであっても構わない。
【0073】
次に、本実施形態に関連する実施例1について述べる。
【0074】
<実施例1>
複数周波数を20MHzおよび、45MHzの2つの周波数として、球状表面弾性波素子を駆動し、その周回受信信号を計測部60で測定した。
【0075】
本実施例の構成を示した模式図は、図1に示すとおりで第1の実施形態と同様であるので説明は省略する。
【0076】
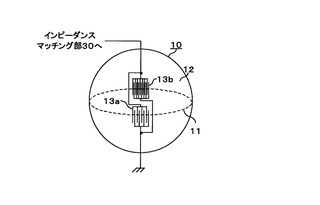
図7は、は本実施例で使用する球状弾性表面波素子の構成を示した模式図である。
【0077】
球状弾性表面波素子10Sに用いるすだれ状電極は、2つのすだれ状電極13a,13
bを、球状部材12に接して形成する。すだれ状電極13aは20MHzで、13bは45MHzで表面弾性波が発生する電極パターンを持ち、同一の伝搬面11に弾性表面波を励起する。2つのすだれ状電極13a,13bは、電気的には並列接続されている。
【0078】
なお、すだれ状電極13a,13bに15MHzと45MHzのように、一方の周波数が他方の周波数の整数倍となる駆動信号で、同一の伝搬面に弾性表面波を励起すると、一方のすだれ状電極が他方のすだれ状電極が励起した弾性表面波の周回を阻害することがある。そのため、15MHzと45MHzの組合せより、20MHzと45MHzのような組合せの方が望ましい。
【0079】
高周波バースト信号発生部50は、駆動信号としての20MHzの高周波バースト信号および45MHzの高周波バースト信号を交互に出力する。いずれも出力電力は、20dBmである。
【0080】
まず20MHzのバースト信号をゲート時間100μSで送出後、50μSの計測時間待機の後、45MHzの周波数の高周波バースト信号をゲート時間100μSで送出し50μSの計測時間待機をする。その後は上記タイミングを繰り返し行う。
【0081】
したがって、前記2つの周波数の高周波バースト信号は、150μSごとに切り替えられることになる。
【0082】
計測部60は、連続して受信可能な状態となっており、任意時間の周回受信信号強度を測定することができ、本実施例では、バースト信号送出後20μs後の周回受信信号強度を測定した。
【0083】
その結果、20MHzの高周波バースト信号印加時、周回受信信号は平均0.3dBm。45MHzの高周波バースト信号印加時、周回受信信号は平均4.6dBmであった。
【0084】
20MHzおよび45MHzの高周波信号の交互の切り替え時間が150μSのように高速であった場合、電磁リレーのような機械接点を持ったスイッチでは当然として切り替えられないし、フォトモスリレーのような電子スイッチでも内部容量の関係から切り替えにはmS単位以上の時間がかかり、このような状態で駆動計測を行っても正しいインピーダンスマッチングが行われず、受信される周回受信信号強度は−30dBm以下となる。
【0085】
従って、実施例1の実験は、150μSの高速切り替えでありながら、良好に動作していることを示している。
【0086】
<第2の実施形態>
次に、第2の実施形態について説明する。
【0087】
本実施形態の構成を示す模式図は、第1の実施形態における図1と図2と同様であるので説明は省略する。以上のように構成された前記球状表面弾性波素子の複数周波数駆動計測装置の動作を説明する。
【0088】
本実施形態では、複数周波数を第1周波数f1および、第2周波数f2(ただしf1<1.3×f2またはf1>1.3×f2)の2つの周波数としている。
【0089】
高周波バースト信号発生部50は、第1周波数f1および、第2周波数f2のバースト信号を合成して同時に発生させる。
【0090】
第1周波数f1および、第2周波数f2を合成したバースト信号は、周波数選択部20へ印加されるが、周波数選択回路21を通過する前記バースト信号は周波数選択回路21の作用により周波数f1のみ、周波数選択回路22を通過する前記バースト信号は周波数選択回路22の作用により周波数f2のみが通過する。
【0091】
周波数選択回路21を通った周波数f1のバースト信号は、共振周波数をf1としたインピーダンスマッチング回路31で並列共振状態となり、インピーダンスマッチング回路31のインピーダンスが非常に高くなり、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0092】
周波数選択回路22を通った周波数f2のバースト信号は、共振周波数をf2としたインピーダンスマッチング回路32で並列共振状態となり、インピーダンスマッチング回路32のインピーダンスが非常に高くなり、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0093】
次に、すだれ状電極13は、周波数f1およびf2の各バースト信号の印加により、球状部材12の表面に互いに逆方向に伝搬する弾性表面波SAW1,SAW2を励起し、表面に沿い伝搬させると共に、伝搬した表面弾性波SAW1,SAW2の合成波SAWを受信して周回受信信号を励起出力可能とする。この弾性表面波SAW1,SAW2は、すだれ状電極13を通過しながら球状部材12の表面を多重周回する。
【0094】
周波数f1およびf2の合成バースト信号の印加終了後、すだれ状電極13は、励起した周回受信信号を出力する。前記周回受信信号は印加されたバースト信号と同じ周波数で返される。したがって前記周回受信信号の周波数はf1とf2を合成したものである。
【0095】
前記周回受信信号は、前記動作原理に基づきインピーダンスマッチング部30および周波数選択部20を通り、分離部40を経て増幅器61で検出信号を増幅し計測部60へ入力される。
【0096】
上述したように、本実施形態によれば、高周波バースト信号発生部50より出力された高周波合成バースト信号は、その周波数に適合したインピーダンスマッチング回路が受動的に自動選択されてインピーダンスマッチングが行われ、球状表面弾性波素子10を駆動する。
【0097】
球状表面弾性波素子10より出力される周回受信信号は、その周波数に適合したインピーダンスマッチング回路を受動的に自動選択し、インピーダンスマッチングを行い計測部60へ入力される。
【0098】
次に、本実施形態に関連する実施例2について述べる。
【0099】
<実施例2>
複数周波数を20MHzおよび、45MHzの2つの周波数として、球状表面弾性波素子を駆動し、その周回受信信号を計測部60で測定した。
【0100】
本実施例の構成を示した模式図は、第1の実施形態における図1と同様であるので説明は省略する。
【0101】
また、本実施例で使用する球状弾性表面波素子の構成を示した模式図は、実施例1における図7と同様であるので説明は省略する。
【0102】
高周波バースト信号発生部50は、駆動信号として20MHzの高周波バースト信号および45MHzの高周波バースト信号を合成し出力する。出力電力は、20dBmである。
【0103】
計測部60は、連続して受信可能な状態となっており、任意時間の周回受信信号強度を測定することができ、本実施例では、バースト信号送出後20μs後の周回受信信号強度を測定した。
【0104】
計測部60で受信した、周回受信信号強度は、20MHzと45MHzの合成波であるので、図示していない計算機によって高速フーリエ変換を行い20MHz成分と45MHz成分に分離した。
【0105】
その結果、20MHzの周回受信信号は平均−1.0dBm。45MHzの周回受信信号は平均3.6dBmであった。
【0106】
本実施例のように周波数成分ごとに適したインピーダンスマッチングを行わず駆動計測を行ってもエネルギーロスが大きく、受信される周回受信信号強度は−40dBm以下となる。
【0107】
従って、実施例2の実験は、2つの周波数の同時駆動でありながら、良好に動作していることを示している。
【0108】
このように、複数の周波数で球状表面弾性波素子を駆動計測する装置において、前記複数の周波数にそれぞれ適合する複数個のインピーダンスマッチング回路をスイッチ等により切り替える必要が無くなったので、高速に駆動計測周波数を変更することおよび、複数の駆動周波数を合成し同時に出力することが可能となった
なお、本願発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に亘る構成要素を適宜組合せてもよい。
【図面の簡単な説明】
【0109】
【図1】本発明の第1の実施形態にかかる球状表面弾性波素子の複数周波数駆動計測装置の構成を示す模式図である。
【図2】同実施形態にかかる球状表面弾性波素子の構成を示す模式図である。
【図3】同実施形態にかかる動作を説明するための等価回路図である。
【図4】同実施形態にかかる動作を説明するための等価回路図である。
【図5】同実施形態にかかる動作を説明するための等価回路図である。
【図6】同実施形態にかかる動作を説明するための等価回路図である。
【図7】本発明の実施例1にかかる球状表面弾性波素子の構成を示す模式図である。
【符号の説明】
【0110】
10…球状表面弾性波素子、11…伝搬面、12…球状部材,13、13a、13b…すだれ状電極、20…周波数選択部、21、22…周波数選択回路、21a、22a…等価回路、30…インピーダンスマッチング部、31、32…インピーダンスマッチング回路、31a、32a…等価回路、40…分離部、50…高周波バースト信号発生部、60…計測部、61…増幅器、C21、C22、C31、C32…コンデンサ、L21、L22、L31a、L31b、L32a、L32b…コイル、R…抵抗
【技術分野】
【0001】
本発明は、球状表面弾性波素子の駆動および周回受信信号の計測装置に係り、特に複数の周波数による球状表面弾性波素子の駆動計測装置に関する。
【背景技術】
【0002】
近年、平板形状ではなく、球形状の圧電性結晶基材の表面にすだれ状電極が形成された球状表面弾性波素子が知られている(例えば、特許文献1参照)。
【0003】
この球状表面弾性波素子は、駆動信号として高周波バースト信号がすだれ状電極に印加されると、すだれ状電極から表面弾性波(Surface Acoustic Wave)が励起され、表面弾性波が基材表面の円環状領域を多重に周回する。
【0004】
ここで、表面弾性波は、基材表面の状態に応じて多重周回する速度が変化する。同様に、表面弾性波は、基材表面への分子の付着等により、円環状領域の周長が表面弾性波の波長の整数倍となるとき、共鳴周波数が変化する。
【0005】
このため、球状表面弾性波素子は、基材表面の円環状領域に付着した分子や、円環状領域に成膜された反応膜と環境ガス等との反応を検出する等の用途が提案されている。
【0006】
駆動信号として球状表面弾性波素子に印加する高周波バースト信号の周波数は、球状表面弾性波素子上のすだれ状電極の形状や、基材表面の付着物や円環状領域に成膜された反応膜等で決まり複数の周波数で駆動計測する場合がある。
【0007】
特許文献等は以下の通りである。
【特許文献1】国際公開第WO 01/45255号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、駆動系回路および計測系回路と球状表面弾性波素子の間には信号伝達を効率よく行うためのインピーダンスマッチング回路が必要であるが、前記インピーダンスマッチング回路は、周波数によって回路定数が決まっている。
【0009】
従って、複数の周波数で駆動する場合、おのおのの周波数にあわせた複数個のインピーダンスマッチング回路を駆動周波数に応じて切り替える手段か、インピーダンスマッチング回路定数を変更する手段をもって駆動計測を行う必要がある。
【0010】
インピーダンスマッチング回路の切り替え手段、もしくはインピーダンスマッチング回路定数を変更する手段としては、切り替え時間が十分遅い場合、機械接点を持ったスイッチを手動で切り替えてもよいし、電磁リレーで機械接点を電気的に切り替えてもよいが数mS以下での高速スイッチングはできない。
【0011】
しかしながら、高精度計測においてはドリフトの問題から駆動周波数を高速に切り替える必要がある。電子スイッチや、フォトモスリレーを用いれば高速スイッチングは可能であるが、球状表面弾性波素子の駆動周波数が10MHzを越える高周波である場合、スイッチ素子の持つ静電容量の影響で、回路上は遮断状態にしても駆動信号および周回受信信号が漏洩してしまう問題があり高周波の複数の駆動周波数を高速に切り替えることは困難である。
【0012】
さらに、計測精度を向上するために複数の周波数を切り替えるのではなく合成して同時に出力する方法も考えられているが、スイッチによる切り替え方式では実現不可能である。
【0013】
本発明は、上記事情を考慮してなされたもので、複数の周波数で球状表面弾性波素子を駆動計測する装置において、高速に駆動周波数を変更することおよび、複数の周波数を同時に出力することを可能とする、球状表面弾性波素子の複数周波数駆動計測装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
請求項1に対応する発明は、球状表面弾性波素子に複数の周波数で駆動信号を印加するための駆動系回路と、前記球状表面弾性波素子から出力される複数の周波数の周回受信信号を計測するため計測系回路と、で構成される球状表面弾性波素子の複数周波数駆動計測装置であって、前記駆動系回路および前記計測系回路から前記球状表面弾性波素子の間に、前記複数の周波数でそれぞれ共振する複数個の直列共振回路および、複数個の並列共振回路を備えたことを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0015】
請求項2に対応する発明は、請求項1の球状表面弾性波素子の複数周波数駆動計測装置において、駆動計測する複数の周波数がそれぞれ少なくとも1.3倍以上離れていることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0016】
請求項3に対応する発明は、請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、駆動計測する複数周波数の駆動信号は同時には一つの周波数を出力し、これを順次切り替えることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0017】
請求項4に対応する発明は、請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、駆動計測する複数周波数の駆動信号は、同時に複数周波数の合成駆動信号を出力することを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0018】
請求項5に対応する発明は、請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、同一経路に印加するための駆動系回路であり、出計測系回路がその同一経路の周回受信信号を計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0019】
請求項6に対応する発明は、請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、周波数毎に異なる経路に印加するための駆動系回路であり、出計測系回路がその周波数毎に異なる経路の周回受信信号を各々計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置である。
【0020】
従って、請求項1から6に対応する発明は、たとえば、2つの周波数で球状表面弾性波素子を駆動計測する場合、第1周波数をf1とし、第2周波数をf2として(ただしf1<1.3×f2またはf1>1.3×f2)、駆動系回路および計測系回路から前記表面弾性波素子の間に、f1で共振状態となる直列共振回路とf1で共振状態となる並列共振回路とをコイルで結合させた回路および、f2で共振状態となる直列共振回路と、f2で共振状態となる並列共振回路とをコイルで結合させた回路を並列に構成する。
【0021】
なお、f1で共振する前記並列共振回路および、f2で共振する前記並列共振回路は前記球状表面弾性波素子に対するインピーダンスマッチング回路を兼ねている。
【0022】
これにより、f1で共振状態となる前記直列共振回路とf2で共振状態となる前記直列共振回路とにより、通過する周波数の選択性をもたせ、通過した周波数に適したインピーダンスマッチング回路へ駆動計測信号を伝達することができる。
【0023】
また、インピーダンスマッチング回路がf1で共振する前記並列共振回路およびf2で共振状態となる前記並列共振回路で構成されているため、インピーダンスマッチングに適合しない周波数に対しては、インピーダンスマッチングに適合する側の並列共振回路のインピーダンスが無限大に近い値となることに比べ十分インピーダンスが低くなり、電気的にはその存在を無視できるようになる。
【0024】
このことは、駆動計測する周波数に適合したインピーダンスマッチング回路が受動的に自動選択されることを示している。
【0025】
これにより、複数の周波数で球状表面弾性波素子を駆動および計測する装置において、前記複数の周波数にそれぞれ適合する複数個のインピーダンスマッチング回路をスイッチ等により切り替える必要が無くなった。
【発明の効果】
【0026】
以上説明したように、本発明によれば、複数の周波数で球状表面弾性波素子を駆動計測する装置において、高速に駆動計測周波数を変更することおよび、複数の駆動周波数を合成し同時に出力することが可能となった。
【発明を実施するための最良の形態】
【0027】
以下、本発明の各実施形態について図面を参照しながら説明する。
【0028】
<第1の実施形態>
図1は本発明の第1の実施形態にかかる球状表面弾性波素子の複数周波数駆動計測装置の構成を示す模式図であり、図2はこの球状表面弾性波素子の構成を示す模式図である。
【0029】
この複数周波数駆動計測装置は、球状表面弾性波素子10、周波数選択部20、インピーダンスマッチング部30、分離部40、高周波バースト信号発生部50、計測部60を備えている。
【0030】
ここで、球状表面弾性波素子10は、伝搬面11を有する球状部材12およびすだれ状電極13を備えている。伝搬面11は、連続した曲面からなる円環状の表面を有し、この円環状の表面の少なくとも一部に、すだれ状電極13により励起される互いに逆方向に伝搬する表面弾性波SAW1、SAW2を周回させるための周回経路を備えている。球状部材12は、一旦励起された表面弾性波が多重周回可能な伝搬面11を有する三次元基体であり、本実施形態では、直径10mmの球状に加工された単結晶の水晶材料を用いている。
【0031】
周波数選択部20は、コイルとコンデンサを直列に接続した直列共振回路となっており、高周波バースト信号発生部50からの駆動信号もしくは、球状表面弾性波素子10からの受信周回信号を周波数選択性を持たせて通過させるものである。
【0032】
インピーダンスマッチング部30は、コイルとコンデンサを並列に接続した並列共振回
路となっており、高周波バースト信号発生部50からの駆動系回路および計測部60と球状表面弾性波素子10とのインピーダンスマッチングを周波数選択性を持って行うものである。
【0033】
分離部40は、高周波バースト信号発生部50からの駆動信号を計測部60へ流さないように、また周回受信信号を高周波バースト信号発生部50へ流さないようにするものである。
【0034】
高周波バースト信号発生部50は、任意周波数のバースト信号を断続的に発生させ、これを駆動信号として球状表面弾性波素子10のすだれ状電極13に印加するものである。
【0035】
計測部60は、すだれ状電極13から出力された多重周回中の表面弾性波SAW1、SAW2の検出信号を増幅器61で増幅し検出信号の強度を計測するものである。
【0036】
次に、以上のように構成された前記球状表面弾性波素子の複数周波数駆動計測装置の動作を詳細に説明する。
【0037】
本実施形態では、複数周波数を第1周波数f1および、第2周波数f2(ただしf1<1.3×f2またはf1>1.3×f2)の2つの周波数としている。
【0038】
なぜ1.3以上が好ましいかというと、異なる周波数による差異を検出することで高精度な計測ができることが近い周波数ではそのメリットが活かせない、つまり、差異があまり出ないからである。
【0039】
また、本方式では電気的特性から、1.3倍以下の周波数の切り分けが困難だらである。理論的には切り分けが可能だが、実際はQ(共振の良さ)が有限で経験上1.3倍以上離れていないと本方式を有効に利用することができないからである。
【0040】
高周波バースト信号発生部50は、第1周波数f1および、第2周波数f2のバースト信号を交互に断続的に発生させる。
【0041】
周波数選択部20は、通過周波数をf1とした周波数選択回路21と通過周波数をf2とした周波数選択回路22とが並列に接続されている。
【0042】
周波数選択回路21はコイルL21とコンデンサC21が直列に接続された直列共振回路を形成しており、周波数f1で共振するようになっている。
【0043】
周波数選択回路22はコイルL22とコンデンサC22が直列に接続された直列共振回路を形成しており、周波数f2で共振するようになっている。
【0044】
ここで高周波バースト信号発生部50から周波数f1のバースト信号が出力されたとする。
【0045】
周波数f1のバースト信号は周波数選択回路21、周波数選択回路22にそれぞれに印加されるが、周波数選択回路21は周波数f1で直列共振するのでインピーダンスはほぼ零になる(理論的には直列共振回路における共振状態ではインピーダンスは零となるが、現実的にはコイルの純抵抗成分が残るためわずかにインピーダンスを持つ)のに対し、周波数選択回路22は、共振状態とならないのでインピーダンスを持つ。図3はこの状態を等価的に表したもので直列共振状態である周波数選択回路21はインピーダンスほぼ零の短絡状態21aとなる、言い換えれば単なる電線に等価となる。このため高周波バースト
信号発生部50から出力された周波数f1のバースト信号は、そのほとんどが周波数選択回路21を通ることになる。
【0046】
次に周波数選択回路21を通った周波数f1のバースト信号は、インピーダンスマッチング部30へ印加される。
【0047】
インピーダンスマッチング部30は、共振周波数をf1としたインピーダンスマッチング回路31と共振周波数をf2としたインピーダンスマッチング回路32とが直列に接続されている。
【0048】
インピーダンスマッチング回路31は、二次コイルL31aおよび二次コイルL31aとトランスを構成するコイルL31bとコンデンサC31が並列に接続された並列共振回路を形成しており、周波数f1で共振するようになっている。
【0049】
インピーダンスマッチング回路32は、二次コイルL32aおよび二次コイルL32aとトランスを構成するコイルL32bとコンデンサC32が並列に接続された並列共振回路を形成しており、周波数f2で共振するようになっている。
【0050】
ここで、球状表面弾性波素子に対するインピーダンスマッチングについて補足説明をする。
【0051】
本実施形態で使用した球状表面弾性波素子10は動作インピーダンスが非常に高いのに対し、高周波電子機器、たとえば本実施形態で使用した高周波バースト信号発生部50や計測部60などは、入出力インピーダンスは一般的に50Ωとなっている。また図示していない接続用高周波同軸ケーブルも特性インピーダンスは50Ωである。このように50Ω系の回路に動作インピーダンスが非常に高い球状表面弾性波素子10を直接接続するとエネルギーロスが大きく効率よく球状表面弾性波素子10を駆動することができない。
【0052】
したがって、インピーダンスマッチング回路を高周波バースト信号発生部50および計測部60と球状表面弾性波素子10の間に挿入することにより、球状表面弾性波素子10の動作インピーダンスを50Ωもしくはその近傍の低いインピーダンスに変換し、エネルギーロスを抑え効率よく球状表面弾性波素子10を駆動することができる状態にしている。
【0053】
具体的には、インピーダンスマッチング回路は、コイルL31bとコンデンサC31による並列共振回路もしくは、コイルL32bとコンデンサC32による並列共振回路で構成し、並列共振状態となったとき球状表面弾性波素子10からみたインピーダンスマッチング回路は非常に高いインピーダンスとなり、動作インピーダンスが非常に高い球状表面弾性波素子10とインピーダンスマッチングがとれる。
【0054】
一方、インピーダンスマッチング用コイルL31bにトランスを構成するように二次コイルL31aを設け、二次コイルL31aの一端を接地し、他端を高周波バースト信号発生部50および計測部60へ接続して、高周波バースト信号発生部50および計測部60からみたインピーダンスマッチング回路のインピーダンスが、50Ωになるようにしてある。また、二次コイルL31aの巻き数は、インピーダンスマッチング用コイルL32bの巻き数より格段に少ない値である。
【0055】
このように、本実施形態における、インピーダンスマッチング回路は、共振状態となったとき、高周波バースト信号発生部50および計測部60と球状表面弾性波素子10のインピーダンスマッチングがとれるものである。
【0056】
周波数選択回路21を通った周波数f1のバースト信号は、共振周波数をf1としたインピーダンスマッチング回路31で並列共振状態となり、インピーダンスマッチング回路31のインピーダンスが非常に高くなり(理論的には並列共振回路における共振状態ではインピーダンスは無限大となるが、現実的にはコイルの純抵抗成分が残るため無限大とはならない)、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0057】
一方、周波数選択回路21を通った周波数f1のバースト信号は、インピーダンスマッチング回路31と直列に接続されている共振周波数をf2としたインピーダンスマッチング回路32にも流れるが、インピーダンスマッチング回路32は並列共振状態とはならないので、並列共振状態にあるインピーダンスマッチング回路31の非常に高いインピーダンスと比べ十分低い値となる。図4はこの状態を等価的に表したもので、インピーダンスマッチング回路31は、十分低い抵抗32aを介して接地されていると見なすことができる。
【0058】
この結果、周波数f1のバースト信号は、周波数f1に最適なインピーダンスマッチング回路31を介してインピーダンスマッチングが行われ、球状表面弾性波素子10へ駆動信号を印加する事ができる。
【0059】
次に、すだれ状電極13は、周波数f1のバースト信号の印加により、球状部材12の表面に互いに逆方向に伝搬する弾性表面波SAW1,SAW2を励起し、表面に沿い伝搬させると共に、伝搬した表面弾性波SAW1,SAW2の図示していない合成波SAWを受信して周回受信信号を励起出力可能とする。この弾性表面波SAW1,SAW2は、すだれ状電極13を通過しながら球状部材12の表面を多重周回する。
【0060】
周波数f1のバースト信号の印加終了後、すだれ状電極13は、励起した周回受信信号を出力する。前記周回受信信号は印加されたバースト信号と同じ周波数で返される。したがって前記周回受信信号の周波数はf1である。
【0061】
前記周回受信信号は、前記動作原理に基づきインピーダンスマッチング回路31および周波数選択回路21を通り、分離部40を経て増幅器61で検出信号を増幅し計測部60へ入力される。
【0062】
次に、高周波バースト信号発生部50から周波数f2のバースト信号が出力されたとする。
【0063】
周波数f2のバースト信号は周波数選択回路21、周波数選択回路22にそれぞれに印加されるが、周波数選択回路22は周波数f2で直列共振するのでインピーダンスはほぼ零になるのに対し、周波数選択回路21は、共振状態とならないのでインピーダンスを持つ。図5はこの状態を等価的に表したもので直列共振状態である周波数選択回路22はインピーダンスほぼ零の短絡状態22aとなる。このため高周波バースト信号発生部50から出力された周波数f2のバースト信号は、そのほとんどが周波数選択回路22を通ることになる。
【0064】
次に周波数選択回路22を通った周波数f2のバースト信号は、インピーダンスマッチング部30へ印加され共振周波数をf2としたインピーダンスマッチング回路32で並列共振状態となり、インピーダンスマッチング回路32のインピーダンスが非常に高くなり、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0065】
一方、周波数選択回路22を通った周波数f2のバースト信号は、インピーダンスマッチング回路32と直列に接続されている共振周波数をf1としたインピーダンスマッチング回路31にも流れるが、インピーダンスマッチング回路31は並列共振状態とはならないので、並列共振状態にあるインピーダンスマッチング回路32の非常に高いインピーダンスと比べ十分低い値となる。図6はこの状態を等価的に表したもので、インピーダンスマッチング回路32は、十分低い抵抗31aを介して球状表面弾性波素子10へ接続されていると見なすことができる。
【0066】
この結果、周波数f2のバースト信号は、周波数f2に最適なインピーダンスマッチング回路32を介してインピーダンスマッチングが行われ、球状表面弾性波素子10へ駆動信号を印加する事ができる。
【0067】
次に、すだれ状電極13は、周波数f2のバースト信号の印加により、球状部材12の表面に互いに逆方向に伝搬する弾性表面波SAW1,SAW2を励起し、表面に沿い伝搬させると共に、伝搬した表面弾性波SAW1,SAW2の合成波SAWを受信して周回受信信号を励起出力可能とする。この弾性表面波SAW1,SAW2は、すだれ状電極13を通過しながら球状部材12の表面を多重周回する。
【0068】
周波数f2のバースト信号の印加終了後、すだれ状電極13は、励起した周回受信信号を出力する。前記周回受信信号は印加されたバースト信号と同じ周波数で返される。したがって前記周回受信信号の周波数はf2である。
【0069】
前記周回受信信号は、前記動作原理に基づきインピーダンスマッチング回路32および周波数選択回路22を通り、分離部40を経て増幅器61で検出信号を増幅し計測部60へ入力される。
【0070】
上述したように、本実施形態によれば、高周波バースト信号発生部50より出力された高周波バースト信号は、その周波数に適合したマッチング回路が受動的に自動選択されてインピーダンスマッチングが行われ、球状表面弾性波素子10を駆動する。
【0071】
球状表面弾性波素子10より出力される周回受信信号は、その周波数に適合したインピーダンスマッチング回路を受動的に自動選択し、インピーダンスマッチングを行い計測部60へ入力される。
【0072】
以上の説明は、周回経路が単一経路の場合で説明したが、この周波数毎に異なる経路に信号を印加し、計測するものであっても構わない。
【0073】
次に、本実施形態に関連する実施例1について述べる。
【0074】
<実施例1>
複数周波数を20MHzおよび、45MHzの2つの周波数として、球状表面弾性波素子を駆動し、その周回受信信号を計測部60で測定した。
【0075】
本実施例の構成を示した模式図は、図1に示すとおりで第1の実施形態と同様であるので説明は省略する。
【0076】
図7は、は本実施例で使用する球状弾性表面波素子の構成を示した模式図である。
【0077】
球状弾性表面波素子10Sに用いるすだれ状電極は、2つのすだれ状電極13a,13
bを、球状部材12に接して形成する。すだれ状電極13aは20MHzで、13bは45MHzで表面弾性波が発生する電極パターンを持ち、同一の伝搬面11に弾性表面波を励起する。2つのすだれ状電極13a,13bは、電気的には並列接続されている。
【0078】
なお、すだれ状電極13a,13bに15MHzと45MHzのように、一方の周波数が他方の周波数の整数倍となる駆動信号で、同一の伝搬面に弾性表面波を励起すると、一方のすだれ状電極が他方のすだれ状電極が励起した弾性表面波の周回を阻害することがある。そのため、15MHzと45MHzの組合せより、20MHzと45MHzのような組合せの方が望ましい。
【0079】
高周波バースト信号発生部50は、駆動信号としての20MHzの高周波バースト信号および45MHzの高周波バースト信号を交互に出力する。いずれも出力電力は、20dBmである。
【0080】
まず20MHzのバースト信号をゲート時間100μSで送出後、50μSの計測時間待機の後、45MHzの周波数の高周波バースト信号をゲート時間100μSで送出し50μSの計測時間待機をする。その後は上記タイミングを繰り返し行う。
【0081】
したがって、前記2つの周波数の高周波バースト信号は、150μSごとに切り替えられることになる。
【0082】
計測部60は、連続して受信可能な状態となっており、任意時間の周回受信信号強度を測定することができ、本実施例では、バースト信号送出後20μs後の周回受信信号強度を測定した。
【0083】
その結果、20MHzの高周波バースト信号印加時、周回受信信号は平均0.3dBm。45MHzの高周波バースト信号印加時、周回受信信号は平均4.6dBmであった。
【0084】
20MHzおよび45MHzの高周波信号の交互の切り替え時間が150μSのように高速であった場合、電磁リレーのような機械接点を持ったスイッチでは当然として切り替えられないし、フォトモスリレーのような電子スイッチでも内部容量の関係から切り替えにはmS単位以上の時間がかかり、このような状態で駆動計測を行っても正しいインピーダンスマッチングが行われず、受信される周回受信信号強度は−30dBm以下となる。
【0085】
従って、実施例1の実験は、150μSの高速切り替えでありながら、良好に動作していることを示している。
【0086】
<第2の実施形態>
次に、第2の実施形態について説明する。
【0087】
本実施形態の構成を示す模式図は、第1の実施形態における図1と図2と同様であるので説明は省略する。以上のように構成された前記球状表面弾性波素子の複数周波数駆動計測装置の動作を説明する。
【0088】
本実施形態では、複数周波数を第1周波数f1および、第2周波数f2(ただしf1<1.3×f2またはf1>1.3×f2)の2つの周波数としている。
【0089】
高周波バースト信号発生部50は、第1周波数f1および、第2周波数f2のバースト信号を合成して同時に発生させる。
【0090】
第1周波数f1および、第2周波数f2を合成したバースト信号は、周波数選択部20へ印加されるが、周波数選択回路21を通過する前記バースト信号は周波数選択回路21の作用により周波数f1のみ、周波数選択回路22を通過する前記バースト信号は周波数選択回路22の作用により周波数f2のみが通過する。
【0091】
周波数選択回路21を通った周波数f1のバースト信号は、共振周波数をf1としたインピーダンスマッチング回路31で並列共振状態となり、インピーダンスマッチング回路31のインピーダンスが非常に高くなり、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0092】
周波数選択回路22を通った周波数f2のバースト信号は、共振周波数をf2としたインピーダンスマッチング回路32で並列共振状態となり、インピーダンスマッチング回路32のインピーダンスが非常に高くなり、動作インピーダンスの非常に高い球状表面弾性波素子10とインピーダンスマッチングをとることができる。
【0093】
次に、すだれ状電極13は、周波数f1およびf2の各バースト信号の印加により、球状部材12の表面に互いに逆方向に伝搬する弾性表面波SAW1,SAW2を励起し、表面に沿い伝搬させると共に、伝搬した表面弾性波SAW1,SAW2の合成波SAWを受信して周回受信信号を励起出力可能とする。この弾性表面波SAW1,SAW2は、すだれ状電極13を通過しながら球状部材12の表面を多重周回する。
【0094】
周波数f1およびf2の合成バースト信号の印加終了後、すだれ状電極13は、励起した周回受信信号を出力する。前記周回受信信号は印加されたバースト信号と同じ周波数で返される。したがって前記周回受信信号の周波数はf1とf2を合成したものである。
【0095】
前記周回受信信号は、前記動作原理に基づきインピーダンスマッチング部30および周波数選択部20を通り、分離部40を経て増幅器61で検出信号を増幅し計測部60へ入力される。
【0096】
上述したように、本実施形態によれば、高周波バースト信号発生部50より出力された高周波合成バースト信号は、その周波数に適合したインピーダンスマッチング回路が受動的に自動選択されてインピーダンスマッチングが行われ、球状表面弾性波素子10を駆動する。
【0097】
球状表面弾性波素子10より出力される周回受信信号は、その周波数に適合したインピーダンスマッチング回路を受動的に自動選択し、インピーダンスマッチングを行い計測部60へ入力される。
【0098】
次に、本実施形態に関連する実施例2について述べる。
【0099】
<実施例2>
複数周波数を20MHzおよび、45MHzの2つの周波数として、球状表面弾性波素子を駆動し、その周回受信信号を計測部60で測定した。
【0100】
本実施例の構成を示した模式図は、第1の実施形態における図1と同様であるので説明は省略する。
【0101】
また、本実施例で使用する球状弾性表面波素子の構成を示した模式図は、実施例1における図7と同様であるので説明は省略する。
【0102】
高周波バースト信号発生部50は、駆動信号として20MHzの高周波バースト信号および45MHzの高周波バースト信号を合成し出力する。出力電力は、20dBmである。
【0103】
計測部60は、連続して受信可能な状態となっており、任意時間の周回受信信号強度を測定することができ、本実施例では、バースト信号送出後20μs後の周回受信信号強度を測定した。
【0104】
計測部60で受信した、周回受信信号強度は、20MHzと45MHzの合成波であるので、図示していない計算機によって高速フーリエ変換を行い20MHz成分と45MHz成分に分離した。
【0105】
その結果、20MHzの周回受信信号は平均−1.0dBm。45MHzの周回受信信号は平均3.6dBmであった。
【0106】
本実施例のように周波数成分ごとに適したインピーダンスマッチングを行わず駆動計測を行ってもエネルギーロスが大きく、受信される周回受信信号強度は−40dBm以下となる。
【0107】
従って、実施例2の実験は、2つの周波数の同時駆動でありながら、良好に動作していることを示している。
【0108】
このように、複数の周波数で球状表面弾性波素子を駆動計測する装置において、前記複数の周波数にそれぞれ適合する複数個のインピーダンスマッチング回路をスイッチ等により切り替える必要が無くなったので、高速に駆動計測周波数を変更することおよび、複数の駆動周波数を合成し同時に出力することが可能となった
なお、本願発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に亘る構成要素を適宜組合せてもよい。
【図面の簡単な説明】
【0109】
【図1】本発明の第1の実施形態にかかる球状表面弾性波素子の複数周波数駆動計測装置の構成を示す模式図である。
【図2】同実施形態にかかる球状表面弾性波素子の構成を示す模式図である。
【図3】同実施形態にかかる動作を説明するための等価回路図である。
【図4】同実施形態にかかる動作を説明するための等価回路図である。
【図5】同実施形態にかかる動作を説明するための等価回路図である。
【図6】同実施形態にかかる動作を説明するための等価回路図である。
【図7】本発明の実施例1にかかる球状表面弾性波素子の構成を示す模式図である。
【符号の説明】
【0110】
10…球状表面弾性波素子、11…伝搬面、12…球状部材,13、13a、13b…すだれ状電極、20…周波数選択部、21、22…周波数選択回路、21a、22a…等価回路、30…インピーダンスマッチング部、31、32…インピーダンスマッチング回路、31a、32a…等価回路、40…分離部、50…高周波バースト信号発生部、60…計測部、61…増幅器、C21、C22、C31、C32…コンデンサ、L21、L22、L31a、L31b、L32a、L32b…コイル、R…抵抗
【特許請求の範囲】
【請求項1】
球状表面弾性波素子に複数の周波数で駆動信号を印加するための駆動系回路と、
前記球状表面弾性波素子から出力される複数の周波数の周回受信信号を計測するため計測系回路と、
で構成される球状表面弾性波素子の複数周波数駆動計測装置であって、
前記駆動系回路および前記計測系回路から前記球状表面弾性波素子の間に、前記複数の周波数でそれぞれ共振する複数個の直列共振回路および、複数個の並列共振回路を備えたことを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項2】
請求項1の球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数の周波数がそれぞれ少なくとも1.3倍以上離れていることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項3】
請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は同時には一つの周波数を出力し、これを順次切り替えることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項4】
請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、同時に複数周波数の合成駆動信号を出力することを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項5】
請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、同一経路に印加するための駆動系回路であり、出計測系回路がその同一経路の周回受信信号を計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項6】
請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、周波数毎に異なる経路に印加するための駆動系回路であり、出計測系回路がその周波数毎に異なる経路の周回受信信号を各々計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項1】
球状表面弾性波素子に複数の周波数で駆動信号を印加するための駆動系回路と、
前記球状表面弾性波素子から出力される複数の周波数の周回受信信号を計測するため計測系回路と、
で構成される球状表面弾性波素子の複数周波数駆動計測装置であって、
前記駆動系回路および前記計測系回路から前記球状表面弾性波素子の間に、前記複数の周波数でそれぞれ共振する複数個の直列共振回路および、複数個の並列共振回路を備えたことを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項2】
請求項1の球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数の周波数がそれぞれ少なくとも1.3倍以上離れていることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項3】
請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は同時には一つの周波数を出力し、これを順次切り替えることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項4】
請求項1または請求項2の球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、同時に複数周波数の合成駆動信号を出力することを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項5】
請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、同一経路に印加するための駆動系回路であり、出計測系回路がその同一経路の周回受信信号を計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【請求項6】
請求項1から4何れかの球状表面弾性波素子の複数周波数駆動計測装置において、
駆動計測する複数周波数の駆動信号は、周波数毎に異なる経路に印加するための駆動系回路であり、出計測系回路がその周波数毎に異なる経路の周回受信信号を各々計測する計測系回路であることを特徴とする球状表面弾性波素子の複数周波数駆動計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−232451(P2007−232451A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−52018(P2006−52018)
【出願日】平成18年2月28日(2006.2.28)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年2月28日(2006.2.28)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
[ Back to top ]