
生体インピーダンス測定装置
【課題】消費電力を抑えつつ、生体のインピーダンスの平均値および生体のインピーダンスの変化量を高い精度で検出することができる生体インピーダンス測定装置を提供する。
【解決手段】インピーダンス測定部Z_MEASは、所定の電流に基づく検査電流を生体ORGに流して、生体ORGのインピーダンスに対応する検査電圧を取得する。アンプ部AMPBは、補正電圧を基準に検査電圧を増幅する。AD変換装置ADCは、アンプ部AMPBの出力をAD変換する。制御装置CPUは、AD変換装置ADCのAD変換結果に基づいて、アンプ部AMPBの出力がAD変換装置ADCの入力ダイナミックレンジ内に納まるように検査電流および補正電圧を制御し、所定の電流、補正電圧、およびAD変換結果に基づいて生体ORGのインピーダンスの平均値および生体ORGのインピーダンスの変化量を計算する。
【解決手段】インピーダンス測定部Z_MEASは、所定の電流に基づく検査電流を生体ORGに流して、生体ORGのインピーダンスに対応する検査電圧を取得する。アンプ部AMPBは、補正電圧を基準に検査電圧を増幅する。AD変換装置ADCは、アンプ部AMPBの出力をAD変換する。制御装置CPUは、AD変換装置ADCのAD変換結果に基づいて、アンプ部AMPBの出力がAD変換装置ADCの入力ダイナミックレンジ内に納まるように検査電流および補正電圧を制御し、所定の電流、補正電圧、およびAD変換結果に基づいて生体ORGのインピーダンスの平均値および生体ORGのインピーダンスの変化量を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、植込み型医療機器に搭載可能な生体インピーダンス測定装置に関する。
【背景技術】
【0002】
生体の心拍出量および肺動脈楔入圧を精度よく算出する方法として、特許文献1に開示された方法が知られている。図11は、特許文献1に開示された心拍出量モニタシステムの構成を示している。以下、図11を用いて、この心拍出量モニタシステムの動作の概略を説明する。なお、特許文献1に開示された構成に対して、以下の説明の都合上の変更を施した構成が図11に示されている。
【0003】
心拍出量モニタシステムは、心臓に交流電流を印加することにより得られるインピーダンス信号を用いて、心拍出量および肺動脈楔入圧を算出する。抽出部11は、受信部10で受信されたインピーダンス信号に基づいて、最小インピーダンス信号Zminと、最大インピーダンス信号Zmaxと、インピーダンス平均値信号Zmeanとを抽出する。
【0004】
固形組織由来インピーダンス推定部12は、肺循環に高張食塩水を注入した後の所定時間内に得られたインピーダンス信号の一心周期内の最大値と最小値とからなる複数心周期のデータセットに基づいて、固形組織由来インピーダンスZsを推定する。心拍出量算出部13は、以下の(A)式を用いて、心拍出量を精度よく算出している。
CO=k・(1/(Zmin−Zs)−1/(Zmax−Zs))・HR (A)
ここで、CO:心拍出量、k:補正係数、HR:心拍数である。
【0005】
肺動脈楔入圧算出部14は、以下の(B)式を用いて、肺動脈楔入圧を精度よく算出している。
PAWP=A×C/(Zmean−Zs)−CO×B (B)
ここで、PAWP:肺動脈楔入圧、A、B、C:補正係数である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−168120号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
一般に、心臓のインピーダンス平均値信号Zmeanの値は500Ω程度であることが知られており、最小インピーダンス信号Zminの値は500Ω−5Ω程度、最大インピーダンス信号Zmaxの値は500Ω+5Ω程度であることが知られている。即ち、インピーダンス平均値信号Zmeanに対する最小インピーダンス信号Zminまたは最大インピーダンス信号Zmaxのばらつきは、心臓のインピーダンス平均値信号に対して±1%程度である。
【0008】
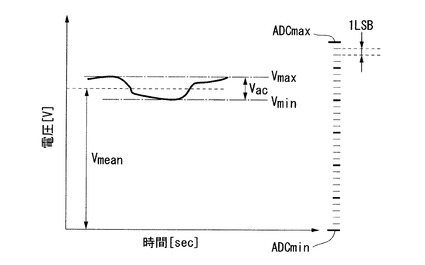
上記の(A)式、(B)式に記載された計算を行うために心臓のインピーダンス信号に相当する電圧をAD変換装置で取り込もうとした場合、拍出に伴う心臓のインピーダンス平均値信号Zmean、最小インピーダンス信号Zmin、最大インピーダンス信号Zmaxの差分であるインピーダンス変化信号Zacを検出するためには、AD変換装置に高い有効ビット数が求められる。この様子を図12に示す。なお、図中のインピーダンス平均電圧Vmean、インピーダンス変化電圧Vac、インピーダンス最大電圧Vmax、インピーダンス最少電圧Vminは夫々、インピーダンス平均値信号Zmean、インピーダンス変化信号Zac、最大インピーダンス信号Zmax、最小インピーダンス信号Zminに対応する電圧信号である。また、1LSBはAD変換装置の最少分解能である。
【0009】
以下の(C)式はAD変換装置の消費電力Pdを表す関係式である。ここで、fc:サンプリング周波数、ENOB:有効ビット数である。(C)式は、AD変換装置の消費電力Pdがサンプリング周波数fcと2ENOBの積に比例することを示している。
【0010】
【数1】

【0011】
(C)式からもわかるように、高い有効ビット数を有するAD変換装置では大きな消費電力が必要となる。これは、AD変換装置を搭載する心拍出量モニタシステムにおいても大きな消費電力が必要となることを意味し、心拍出量モニタシステムを搭載する植込み型医療機器の植込み可能期間を短くしてしまうという課題がある。
【0012】
本発明は、上述した課題に鑑みてなされたものであって、消費電力を抑えつつ、生体のインピーダンスの平均値および生体のインピーダンスの変化量を高い精度で検出することができる生体インピーダンス測定装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明は、上記の課題を解決するためになされたもので、所定の電流に基づく検査電流を生体に流して、前記生体のインピーダンスに対応する検査電圧を取得するインピーダンス測定部と、補正電圧を基準に前記検査電圧を増幅するアンプ部と、前記アンプ部の出力をAD変換するAD変換装置と、前記AD変換装置のAD変換結果に基づいて、前記アンプ部の出力が前記AD変換装置の入力ダイナミックレンジ内に納まるように前記検査電流および前記補正電圧を制御し、前記所定の電流、前記補正電圧、および前記AD変換結果に基づいて前記生体のインピーダンスの平均値および前記生体のインピーダンスの変化量を計算する制御装置と、を有する生体インピーダンス測定装置である。
【0014】
また、本発明の生体インピーダンス測定装置において、前記アンプ部は、ローパスフィルタを有する。
【0015】
また、本発明の生体インピーダンス測定装置において、前記インピーダンス測定部は、前記所定の電流を、生体インピーダンスの変化周波数よりも高い変調周波数を有する変調信号で変調し、前記検査電流を生成する変調回路と、前記検査電流を生体に印加して得られる測定電圧を復調し、前記検査電圧を生成する復調回路と、を有し、前記ローパスフィルタは、前記変調回路の変調周波数の2倍よりも小さく、前記生体インピーダンスの変化周波数よりも高い周波数に設定されたカットオフ周波数を有する。
【0016】
また、本発明の生体インピーダンス測定装置において、前記アンプ部は、第1の非反転入力端子、第1の反転入力端子、および第1の出力端子を備え、前記第1の非反転入力端子に前記検査電圧が入力され、前記第1の反転入力端子と前記第1の出力端子が接続された第1の演算増幅器と、第2の非反転入力端子、第2の反転入力端子、および第2の出力端子を備え、前記第2の非反転入力端子に前記補正電圧が入力される第2の演算増幅器と、第1の端子および第2の端子を備え、前記第1の端子が前記第1の演算増幅器の前記第1の出力端子に接続され、前記第2の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続された入力抵抗と、第3の端子および第4の端子を備え、前記第3の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第4の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還抵抗と、第5の端子および第6の端子を備え、前記第5の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第6の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還容量と、を有する。
【発明の効果】
【0017】
本発明によれば、AD変換装置のAD変換結果に基づいて、アンプ部の出力がAD変換装置の入力ダイナミックレンジ内に納まるように検査電流および補正電圧を制御することによって、生体のインピーダンス変化量に対応する電圧を高いゲインで増幅することができる。したがって、有効ビット数が少ないAD変換装置を使用しても十分な分解能で生体のインピーダンス変化量に対応する電圧を取得することが可能となり、消費電力を抑えつつ、生体のインピーダンスの平均値および生体のインピーダンスの変化量を高い精度で検出することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る生体インピーダンス測定装置の構成を示すブロック図である。
【図2】本発明の一実施形態に係るインピーダンス測定部の構成を示すブロック図である。
【図3】本発明の一実施形態に係るインピーダンス測定部中の主要信号の波形および周波数成分を示す図である。
【図4】本発明の一実施形態に係るインピーダンス測定部が有する定電流生成部の構成を示す回路図である。
【図5】本発明の一実施形態に係るインピーダンス測定部が有する変調回路の構成を示す回路図である。
【図6】本発明の一実施形態に係るインピーダンス測定部が有する復調回路の構成を示す回路図である。
【図7】本発明の一実施形態に係るアンプ部の構成を示す回路図である。
【図8】本発明の一実施形態に係る生体インピーダンス測定装置で取得される心臓のインピーダンスに係る信号の変化を示すタイミングチャートである。
【図9】本発明の一実施形態に係る制御装置の動作の手順を示すフローチャートである。
【図10】図9の各ステップにおけるインピーダンス変動電圧の変化を示すタイミングチャートである。
【図11】従来の心拍出量モニタシステムの構成を示すブロック図である。
【図12】従来の心拍出量モニタシステムで取得される心臓のインピーダンスに係る信号の変化を示すタイミングチャートである。
【発明を実施するための形態】
【0019】
以下、図面を参照し、本発明の実施形態を説明する。
【0020】
<生体インピーダンス測定装置>
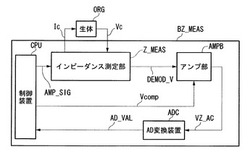
図1は、本発明の一実施形態に係る生体インピーダンス測定装置の構成を示している。図1に示す生体インピーダンス測定装置BZ_MEASは、インピーダンス測定部Z_MEASと、アンプ部AMPBと、AD変換装置ADCと、制御装置CPUと、で構成されている。
【0021】
インピーダンス測定部Z_MEASは、測定対象の生体ORGに対して検査電流Icを印加するための第1リード線と、生体ORGに生じた検査電圧Vcを検出するための第2リード線とに接続されている。インピーダンス測定部Z_MEASには、検査電流Icの大きさを制御するための振幅制御信号AMP_SIGが入力されている。また、インピーダンス測定部Z_MEASはアンプ部AMPBにも接続されている。インピーダンス測定部Z_MEASは、定電流を変調した検査電流Icを生体ORGに流して、生体ORGに生じた検査電圧Vcを取得し、生体ORGのインピーダンスに応じた電圧信号である復調電圧DEMOD_Vをアンプ部AMPBに出力する。
【0022】
アンプ部AMPBは、インピーダンス測定部Z_MEASと、AD変換装置ADCと、制御装置CPUと、に接続されており、インピーダンス測定部Z_MEASから入力された復調電圧DEMOD_Vを、補正電圧Vcompを基準に所定の倍率で増幅し、生体ORGのインピーダンスの変動に応じたインピーダンス変動電圧VZ_ACをAD変換装置ADCに出力する。
【0023】
AD変換装置ADCは、アンプ部AMPBと、制御装置CPUと、に接続されており、アンプ部AMPBから入力されるインピーダンス変動電圧VZ_ACをアナログからデジタルにAD変換し、AD変換結果AD_VALを制御装置CPUに出力する。
【0024】
制御装置CPUは、アンプ部AMPBと、インピーダンス測定部Z_MEASと、AD変換装置ADCと、に接続されている。制御装置CPUは、検査電流Icの大きさを制御するための振幅制御信号AMP_SIGをインピーダンス測定部Z_MEASに出力する。また、制御装置CPUは、AD変換装置ADCから入力されたAD変換結果AD_VALに応じて、アンプ部AMPBに出力する補正電圧Vcompおよび振幅制御信号AMP_SIGを調整すると同時に、振幅制御信号AMP_SIGと、AD変換結果AD_VALと、補正電圧VCOMPと、の値を用いて、生体のインピーダンス平均信号Zmeanおよびインピーダンス変化信号Zacの値を計算する。
【0025】
<インピーダンス測定部>
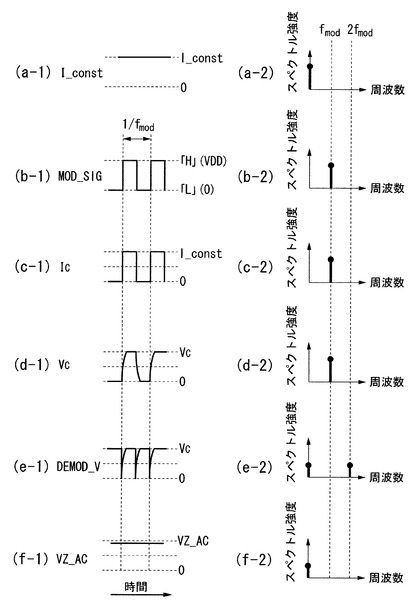
以下、図2、図3、図4、図5、図6を用いてインピーダンス測定部Z_MEASの動作をより詳細に説明する。図2はインピーダンス測定部Z_MEASの構成を示している。図3は、インピーダンス測定部Z_MEAS中の主要信号の波形および周波数成分を示している。図3の(a−1)、(b−1)、(c−1)、(d−1)、(e−1)、(f−1)は、後述する主要信号の波形を表し、横軸は時間、縦軸は信号の振幅を表す。また、図3の(a−2)、(b−2)、(c−2)、(d−2)、(e−2)、(f−2)は、後述する主要信号の周波数成分を表し、横軸は周波数、縦軸はスペクトル強度を表す。図4は、インピーダンス測定部Z_MEASが有する定電流生成部の構成を示している。図5は、インピーダンス測定部Z_MEASが有する変調回路の構成を示している。図6は、インピーダンス測定部Z_MEASが有する復調回路の構成を示している。
【0026】
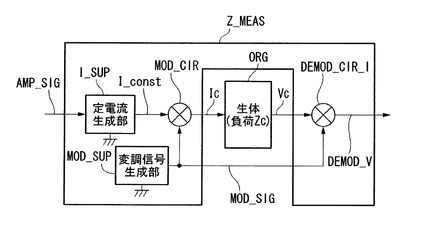
以下、基本的には図2を用いてインピーダンス測定部Z_MEASの動作を説明するが、必要に応じて図3、図4、図5、図6を引用する。図2に記載の通り、インピーダンス測定部Z_MEASは、定電流生成部I_SUPと、変調回路MOD_CIRと、変調信号生成部MOD_SUPと、復調回路DEMOD_CIR_Iと、で構成されている。
【0027】
定電流生成部I_SUPは、制御装置CPUと、変調回路MOD_CIRと、に接続されており、制御装置CPUから入力される振幅制御信号AMP_SIGに応じた定電流I_constを変調回路MOD_CIRに出力する。定電流生成部I_SUPは具体的には、図4に示すように、演算増幅器M1と、抵抗器R1と、NMOSトランジスタQ1と、を有する定電流回路で構成されており、以下の(1)式で表される定電流I_constを出力する。ただし、VDDは定電流生成部I_SUPに供給されている電源電圧であり、VAMP_SIGは振幅制御信号AMP_SIGの電圧であり、R_constは抵抗器R1の抵抗値である。
I_const=(VDD−VAMP_SIG)/R_const (1)
【0028】
なお、定電流I_constの波形は図3(a−1)に示す通りであり、定電流Iconstは、時間に拠らず一定の値を示す。また、定電流I_constの周波数成分は図3(a−2)に示す通りである。定電流I_constは時間に拠らず一定なため、周波数0にスペクトルのピークを有する。
【0029】
変調信号生成部MOD_SUPは変調回路MOD_CIRに接続されており、測定対象となる生体インピーダンスの変化周波数forgよりも高い変調周波数fmodで信号レベルがハイレベル(以下「H」と記載)とローレベル(以下「L」と記載)で切り替わる矩形波である変調信号MOD_SIGを生成し、変調回路MOD_CIRと復調回路DEMOD_CIF_Iに出力する。なお、変調信号MOD_SIGの波形は図3(b−1)に示す通りである。変調信号MOD_SIGは、周期1/fmodで「H」と「L」が切り替わる。変調信号MOD_SIGのスペクトルは図3(b−2)に示す通り、変調周波数fmodにピークを有する。
【0030】
矩形波である変調信号MOD_SIGをf(t)とおいた場合、そのフーリエ展開は以下の(2)式で表される。
f(t)=(VDD/2)・{sin(2π・fmod・t)+ (1/3)・sin(3・2π・fmod・t)+ (1/5)・sin(5・2π・fmod・t)+・・・} (2)
【0031】
説明を簡略にするため、図3(b−2)には、変調信号MOD_SIGを構成する基本波sin(2π・fmod・t)のスペクトル成分のみを記載している。生体インピーダンス測定装置BZ_MEASの動作原理を説明するためには基本波成分のみの議論で十分なため、以降でも基本波の成分のみを考察する。
【0032】
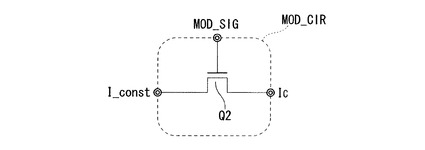
変調回路MOD_CIRは、定電流生成部I_SUPと、変調信号生成部MOD_SUPと、生体ORGと、に接続されており、定電流I_constと変調信号MOD_SIGとを掛け合わせた信号を検査電流Icとして生体ORGに出力する。変調回路MOD_CIRは具体的には、図5に示すアナログスイッチQ2で構成されており、変調信号MOD_SIGが「H」の場合にオンし、変調信号MOD_SIGが「L」の場合にオフする。なお、検査電流Icの波形は図3(c−1)に示すような矩形波であり、検査電流Icのスペクトルは図3(c−2)に示す通り、変調周波数fmodにピークを有する。検査電流Icの基本周波数成分は以下の(3)式で表される。
I_const×sin(2π・fmod・t) (3)
【0033】
検査電流Icを生体ORGに印加することにより、以下の(4)式で与えられる検査電圧Vcが発生する。ただし、Zcは生体ORGのインピーダンスであり、αは生体インピーダンスが純粋な抵抗成分でない場合に生じる位相ずれである。生体の有する容量成分やインダクタンス成分が抵抗成分に比べて十分に小さい場合、αは無視することができる。なお、検査電圧Vcの波形は図3(d−1)に示す通りである。検査電圧Vcのスペクトルは図3(d−2)に示す通り、変調周波数fmodにピークを有する。
Vc=I_const×|Zc|×sin(2π・fmod・t+α) (4)
【0034】
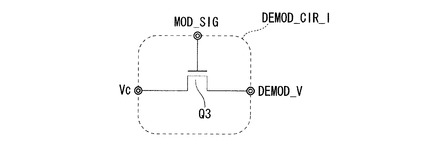
復調回路DEMOD_CIR_Iは、生体ORGと、変調信号生成部MOD_SUPと、アンプ部AMPBと、に接続されており、検査電圧Vcと変調信号MOD_SIGとを掛け合わせた信号を復調電圧DEMOD_Vとしてアンプ部AMPBに出力する。復調回路DEMOD_CIR_Iは具体的には、図6に示すアナログスイッチQ3で構成されており、変調信号MOD_SIGが「H」の場合にオンし、変調信号MOD_SIGが「L」の場合にオフする。
【0035】
復調電圧DEMOD_Vの基本周波数成分は以下の(5)式で与えられる。
I_const×Zc×sin(2π・fmod・t+α)×sin2π・fmod・t
=(1/2)×I_const×|Zc|{cos(-α)-cos(4π・fmod・t)} (5)
【0036】
なお、復調電圧DEMOD_Vの波形は図3(e−1)に示す通りであり、周波数成分は図3(e−2)に示す通りである。(5)式および図3(e−2)からわかるとおり、生体ORGで発生した電圧信号に基づく復調電圧DEMOD_Vは、cos(-α)の項で表わされるDC成分と、-cos(4π・fmod・t)の項で表わされる、変調周波数fmodの2倍に変調された周波数の成分とを有する。
【0037】
<アンプ部>
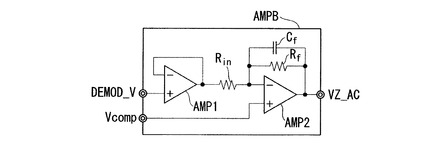
以下、図7を用いてアンプ部AMPBについて説明する。アンプ部AMPBは、第1の演算増幅器AMP1と、第2の演算増幅器AMP2と、入力抵抗Rinと、帰還抵抗Rfと、帰還容量Cfと、で構成されている。
【0038】
第1の演算増幅器AMP1の非反転入力端子には復調信号DEMOD_Vが入力され、第1の演算増幅器AMP1の反転入力端子と出力端子が接続されている。第2の演算増幅器AMP2の非反転入力端子には補正電圧Vcompが入力され、第2の演算増幅器AMP2の出力端子からインピーダンス変動電圧VZ_ACが出力される。入力抵抗Rinの第1端子は第1の演算増幅器AMP1の出力端子に接続され、入力抵抗Rinの第2端子は第2の演算増幅器AMP2の反転入力端子に接続されている。
【0039】
帰還抵抗Rfの第1端子は第2の演算増幅器AMP2の反転入力端子に接続され、帰還抵抗Rfの第2端子は第2の演算増幅器AMP2の出力端子に接続されている。帰還容量Cfの第1端子は第2の演算増幅器AMP2の反転入力端子に接続され、帰還容量Cfの第2端子は第2の演算増幅器AMP2の出力端子に接続されている。
【0040】
第1の演算増幅器AMP1はボルテージフォロアとして動作し、比較的高いインピーダンスを有する復調電圧DEMOD_Vをバッファして、入力抵抗Rinの第1端子に出力する。また、第2の演算増幅器AMP2と、入力抵抗Rinと、帰還抵抗Rfと、帰還容量Cfと、は、反転増幅機能を有するローパスフィルタとして動作し、カットオフ周波数fLPFは以下の(6)式で与えられる。
【0041】
【数2】
【0042】
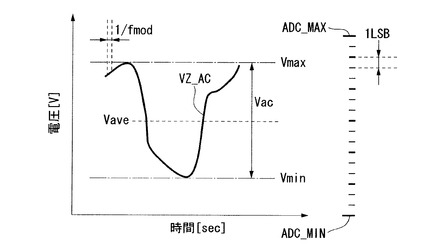
カットオフ周波数fLPFは、変調周波数fmodの基本周波数の2倍よりも小さく、生体インピーダンスの変化周波数fORGよりも大きな値に設定されている。このため、上記のローパスフィルタとしての動作により、(5)式における-cos(4π・fmod・t)の項で表わされる高周波成分が取り除かれる。したがって、アンプ部AMPBで増幅される信号は、(5)式の (1/2)×I_const×|Zc|{cos(-α)}の成分となる。この波形を図3(f−1)に示す。なお、この波形は、変調周波数fmodの変化時間に対応したスケールで描かれており、変調周波数fmodに基づく周期よりも長い周期で変動するインピーダンス変動電圧VZ_ACが時間に応じて変化しないように描かれている。実際のインピーダンス変動電圧VZ_ACは、図8に示すように、生体インピーダンスの変化周波数fORGでゆるやかに変動している。図3(f−2)のインピーダンス変動電圧VZ_ACのスペクトルが示すように、アンプ部AMPBから出力される信号の周波数成分は、ローパスフィルタで高周波成分が取り除かれるため、略DC成分にのみピークを有する。
【0043】
また、アンプ部AMPBは、以下の(7)式が示す特性で信号を増幅する。ただし、Vout:第2の演算増幅器AMP2の出力端子から出力される電圧、Vin:入力抵抗Rinの第1端子に入力される電圧、Vcomp:第2の演算増幅器AMP2の非反転入力端子に入力される電圧である。
【0044】
【数3】
【0045】
ここで、Vin=Vmean+Vacとおくと、(7)式は(8)式のように変形される。
【0046】
【数4】
【0047】
ここで、時間的に変化しない成分を(9)式で示す平均電圧Vaveとすると、(10)式が得られる。
【0048】
【数5】
【0049】
【数6】
【0050】
後で詳細を説明する通り、制御装置CPUは、平均電圧VaveがAD変換装置ADCの入力電圧範囲内(入力ダイナミックレンジ内)に納まるように補正電圧Vcompを調整する。したがって、インピーダンス平均電圧Vmeanがどのような値であっても、補正電圧Vcompを調整することにより、アンプ部AMPBは、平均電圧Vaveを中心としてインピーダンス変化電圧Vacのみを−(Rf/Rin)倍することができる。
【0051】
即ち、制御装置CPUは、(9)式に示す補正電圧Vcompを生成することにより、AD変換装置ADCの入力電圧範囲内でありながら、インピーダンス変化電圧Vacを高ゲインで増幅することができる。このため、AD変換装置ADCの分解能を低くしても、生体インピーダンスの変化に対応する電圧信号の変化を高い分解能で測定することができる。
【0052】
<制御装置>
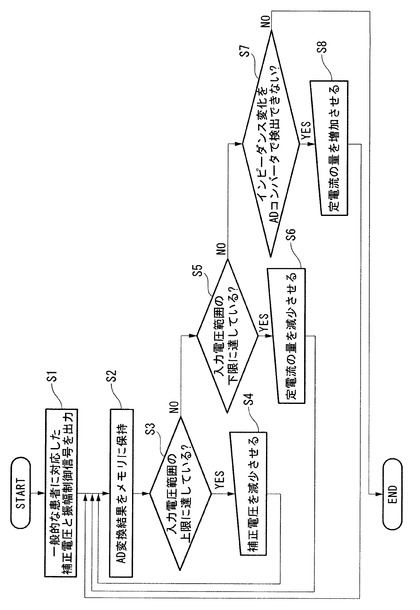
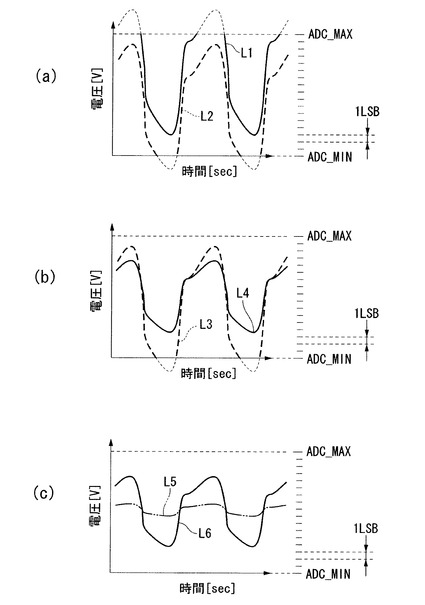
以下、制御装置CPUが補正電圧Vcompを調整する動作について、図9および図10を用いて説明する。図9は、制御装置CPUが行う基準電圧調整の手順を示している。また、図10は、図9に示した各ステップにおけるインピーダンス変動電圧VZ_ACの波形を示している。
【0053】
(ステップS1)
生体インピーダンス測定装置BZ_MEASが生体ORGに接続されて動作を開始すると、制御装置CPUは、一般的な患者の生体のインピーダンス平均電圧Vmeanおよびインピーダンス変化電圧Vacを検出するのに最適な補正電圧Vcompと振幅制御信号AMP_SIGを出力する。この動作が終わると、処理はステップS2に進む。
【0054】
(ステップS2)
制御装置CPUは、所定の時間(生体のインピーダンス変化の1周期以上の時間)にわたるAD変換結果AD_VALを取り込み、制御装置CPU内部のメモリに保持する。この動作が終わると、処理はステップS3に進む。
【0055】
(ステップS3)
制御装置CPUは、メモリに保持されたAD変換結果AD_VALの値がAD変換装置ADCにおけるAD変換可能電圧の上限値ADC_MAXに達しているか否かを判定する。もし、AD変換結果AD_VALの値がAD変換可能電圧の上限値ADC_MAXに達している場合(例えば図10(a)の波形L1が得られた場合)には処理がステップS4に進み、AD変換結果AD_VALの値がAD変換可能電圧の上限値ADC_MAXに達していない場合(例えば図10(a)の波形L2が得られた場合)には処理がステップS5に進む。
【0056】
(ステップS4)
制御装置CPUは、アンプ部AMPBに印加する補正電圧Vcompを現在の電圧に対して所定の割合だけ減少させる。この制御が行われることにより、例えば図10(a)の波形L1が波形L2に変化し、変動の中心電圧が低下する。この動作が終わると、処理はステップS2に移行する。
【0057】
(ステップS5)
制御装置CPUは、メモリに保持されたAD変換結果AD_VALの値がAD変換装置ADCにおけるAD変換可能電圧の下限値ADC_MINに達しているか否かを判定する。もし、AD変換結果AD_VALの値がAD変換可能電圧の下限値ADC_MINに達している場合(例えば図10(b)の波形L3が得られた場合)には処理がステップS6に進み、AD変換結果AD_VALの値がAD変換可能電圧の下限値ADC_MINに達していない場合(例えば図10(b)の波形L4が得られた場合)には処理がステップS7に進む。
【0058】
(ステップS6)
制御装置CPUは、振幅制御信号AMP_SIGを増加させることにより、定電流I_constを現在の電流に対して所定の割合だけ減少させる。この制御が行われることにより、図10(b)の波形L3が波形L4に変化し、信号の振幅が減少する。この動作が終わると、処理がステップS2に移行する。
【0059】
(ステップS7)
制御装置CPUは、メモリに保持されたAD変換結果AD_VALの値が十分な振幅を有するか否かを判定する。もし、AD変換結果AD_VALの値が数LSB程度しか変化せず、インピーダンス変化電圧Vacを十分な分解能でAD変換できない場合(例えば図10(c)の波形L5が得られた場合)には処理がステップS8に進む。AD変換結果AD_VALの値の変化が十分に大きく、インピーダンス変化電圧Vacを十分な分解能でAD変換できる場合(例えば図10(c)の波形L6が得られた場合)には本制御シーケンスは終了する。
【0060】
(ステップS8)
制御装置CPUは、振幅制御信号AMP_SIGを減少させることにより、定電流I_constを現在の電流に対して所定の割合だけ増加させる。この制御が行われることにより、図10(c)の波形L5が波形L6に変化し、信号の振幅が増加する。この動作が終わると、処理はステップS2に移行する。
【0061】
以上のようなシーケンスにより、生体インピーダンスの変化成分が十分な振幅をもちつつ、その振幅をAD変換装置ADCの入力電圧範囲内(ダイナミックレンジ内)に収めることができる。
【0062】
以下、制御装置CPUにおけるインピーダンス値の計算方法について説明する。制御装置CPUは、補正電圧Vcompと、平均電圧Vaveと、振幅制御信号AMP_SIGと、からインピーダンス平均値信号Zmeanとインピーダンス変化信号Zacを計算する。(9)式を変形すると、インピーダンス平均電圧Vmeanは以下の(11)式で与えられる。
【0063】
【数7】
【0064】
したがって、オームの法則から、インピーダンス平均値信号Zmeanは以下の(12)式で求められる。
Zmean=Vmean/Iconst (12)
【0065】
また、(12)式に(1)式を代入することにより、以下の(13)式が求まる。
Zmean=Vmean/{(VDD−AMP_SIG)×R_const} (13)
【0066】
同様にして、インピーダンス変化信号Zacは以下の(14)式で与えられる。
Zac=Vac/{(VDD−AMP_SIG)×R_const} (14)
【0067】
上述したように、本実施形態の生体インピーダンス測定装置BZ_MEASによれば、制御装置CPUは、生体ORGのインピーダンス変動信号VZ_ACがAD変換装置ADCの入力電圧範囲内に納まるように検査電流Icおよび補正電圧Vcompを調整することにより、インピーダンス変化電圧Vacを高いゲインで増幅することができる。したがって、AD変換装置ADCの有効ビット数が少ない場合でも、十分な分解能で、生体インピーダンスの平均値(Zmean)と生体インピーダンスの変化成分(Zac)を計算することができる。
【0068】
AD変換装置の消費電力Pdを表す(15)式からもわかるとおり、有効ビット数が少ない場合、AD変換装置ADCは小さな消費電力で動作するため、生体インピーダンス測定装置BZ_MEASにおける消費電力を低減させることができる。
【0069】
【数8】
【0070】
したがって、低消費電力を実現しつつ、高い精度で生体インピーダンスの平均値および変化量を検出することができる。また、ローパスフィルタにより所望の帯域外の信号成分を除去できるため、より正確なインピーダンス変動信号VZ_ACを得ることができる。
【0071】
以上、図面を参照して本発明の実施形態について詳述してきたが、具体的な構成は上記の実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0072】
BZ_MEAS・・・生体インピーダンス測定装置、Z_MEAS・・・インピーダンス測定部、AMPB・・・アンプ部、ADC・・・AD変換装置、CPU・・・制御装置、I_SUP・・・定電流生成部、MOD_CIR・・・変調回路、MOD_SUP・・・変調信号生成部、DEMOD_CIR_I・・・復調回路、M1・・・演算増幅器、R1・・・抵抗器、Q1・・・NMOSトランジスタ、Q2,Q3・・・アナログスイッチ、AMP1・・・第1の演算増幅器、AMP2・・・第2の演算増幅器、Rin・・・入力抵抗、Rf・・・帰還抵抗、Cf・・・帰還容量
【技術分野】
【0001】
本発明は、植込み型医療機器に搭載可能な生体インピーダンス測定装置に関する。
【背景技術】
【0002】
生体の心拍出量および肺動脈楔入圧を精度よく算出する方法として、特許文献1に開示された方法が知られている。図11は、特許文献1に開示された心拍出量モニタシステムの構成を示している。以下、図11を用いて、この心拍出量モニタシステムの動作の概略を説明する。なお、特許文献1に開示された構成に対して、以下の説明の都合上の変更を施した構成が図11に示されている。
【0003】
心拍出量モニタシステムは、心臓に交流電流を印加することにより得られるインピーダンス信号を用いて、心拍出量および肺動脈楔入圧を算出する。抽出部11は、受信部10で受信されたインピーダンス信号に基づいて、最小インピーダンス信号Zminと、最大インピーダンス信号Zmaxと、インピーダンス平均値信号Zmeanとを抽出する。
【0004】
固形組織由来インピーダンス推定部12は、肺循環に高張食塩水を注入した後の所定時間内に得られたインピーダンス信号の一心周期内の最大値と最小値とからなる複数心周期のデータセットに基づいて、固形組織由来インピーダンスZsを推定する。心拍出量算出部13は、以下の(A)式を用いて、心拍出量を精度よく算出している。
CO=k・(1/(Zmin−Zs)−1/(Zmax−Zs))・HR (A)
ここで、CO:心拍出量、k:補正係数、HR:心拍数である。
【0005】
肺動脈楔入圧算出部14は、以下の(B)式を用いて、肺動脈楔入圧を精度よく算出している。
PAWP=A×C/(Zmean−Zs)−CO×B (B)
ここで、PAWP:肺動脈楔入圧、A、B、C:補正係数である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−168120号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
一般に、心臓のインピーダンス平均値信号Zmeanの値は500Ω程度であることが知られており、最小インピーダンス信号Zminの値は500Ω−5Ω程度、最大インピーダンス信号Zmaxの値は500Ω+5Ω程度であることが知られている。即ち、インピーダンス平均値信号Zmeanに対する最小インピーダンス信号Zminまたは最大インピーダンス信号Zmaxのばらつきは、心臓のインピーダンス平均値信号に対して±1%程度である。
【0008】
上記の(A)式、(B)式に記載された計算を行うために心臓のインピーダンス信号に相当する電圧をAD変換装置で取り込もうとした場合、拍出に伴う心臓のインピーダンス平均値信号Zmean、最小インピーダンス信号Zmin、最大インピーダンス信号Zmaxの差分であるインピーダンス変化信号Zacを検出するためには、AD変換装置に高い有効ビット数が求められる。この様子を図12に示す。なお、図中のインピーダンス平均電圧Vmean、インピーダンス変化電圧Vac、インピーダンス最大電圧Vmax、インピーダンス最少電圧Vminは夫々、インピーダンス平均値信号Zmean、インピーダンス変化信号Zac、最大インピーダンス信号Zmax、最小インピーダンス信号Zminに対応する電圧信号である。また、1LSBはAD変換装置の最少分解能である。
【0009】
以下の(C)式はAD変換装置の消費電力Pdを表す関係式である。ここで、fc:サンプリング周波数、ENOB:有効ビット数である。(C)式は、AD変換装置の消費電力Pdがサンプリング周波数fcと2ENOBの積に比例することを示している。
【0010】
【数1】
【0011】
(C)式からもわかるように、高い有効ビット数を有するAD変換装置では大きな消費電力が必要となる。これは、AD変換装置を搭載する心拍出量モニタシステムにおいても大きな消費電力が必要となることを意味し、心拍出量モニタシステムを搭載する植込み型医療機器の植込み可能期間を短くしてしまうという課題がある。
【0012】
本発明は、上述した課題に鑑みてなされたものであって、消費電力を抑えつつ、生体のインピーダンスの平均値および生体のインピーダンスの変化量を高い精度で検出することができる生体インピーダンス測定装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明は、上記の課題を解決するためになされたもので、所定の電流に基づく検査電流を生体に流して、前記生体のインピーダンスに対応する検査電圧を取得するインピーダンス測定部と、補正電圧を基準に前記検査電圧を増幅するアンプ部と、前記アンプ部の出力をAD変換するAD変換装置と、前記AD変換装置のAD変換結果に基づいて、前記アンプ部の出力が前記AD変換装置の入力ダイナミックレンジ内に納まるように前記検査電流および前記補正電圧を制御し、前記所定の電流、前記補正電圧、および前記AD変換結果に基づいて前記生体のインピーダンスの平均値および前記生体のインピーダンスの変化量を計算する制御装置と、を有する生体インピーダンス測定装置である。
【0014】
また、本発明の生体インピーダンス測定装置において、前記アンプ部は、ローパスフィルタを有する。
【0015】
また、本発明の生体インピーダンス測定装置において、前記インピーダンス測定部は、前記所定の電流を、生体インピーダンスの変化周波数よりも高い変調周波数を有する変調信号で変調し、前記検査電流を生成する変調回路と、前記検査電流を生体に印加して得られる測定電圧を復調し、前記検査電圧を生成する復調回路と、を有し、前記ローパスフィルタは、前記変調回路の変調周波数の2倍よりも小さく、前記生体インピーダンスの変化周波数よりも高い周波数に設定されたカットオフ周波数を有する。
【0016】
また、本発明の生体インピーダンス測定装置において、前記アンプ部は、第1の非反転入力端子、第1の反転入力端子、および第1の出力端子を備え、前記第1の非反転入力端子に前記検査電圧が入力され、前記第1の反転入力端子と前記第1の出力端子が接続された第1の演算増幅器と、第2の非反転入力端子、第2の反転入力端子、および第2の出力端子を備え、前記第2の非反転入力端子に前記補正電圧が入力される第2の演算増幅器と、第1の端子および第2の端子を備え、前記第1の端子が前記第1の演算増幅器の前記第1の出力端子に接続され、前記第2の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続された入力抵抗と、第3の端子および第4の端子を備え、前記第3の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第4の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還抵抗と、第5の端子および第6の端子を備え、前記第5の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第6の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還容量と、を有する。
【発明の効果】
【0017】
本発明によれば、AD変換装置のAD変換結果に基づいて、アンプ部の出力がAD変換装置の入力ダイナミックレンジ内に納まるように検査電流および補正電圧を制御することによって、生体のインピーダンス変化量に対応する電圧を高いゲインで増幅することができる。したがって、有効ビット数が少ないAD変換装置を使用しても十分な分解能で生体のインピーダンス変化量に対応する電圧を取得することが可能となり、消費電力を抑えつつ、生体のインピーダンスの平均値および生体のインピーダンスの変化量を高い精度で検出することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る生体インピーダンス測定装置の構成を示すブロック図である。
【図2】本発明の一実施形態に係るインピーダンス測定部の構成を示すブロック図である。
【図3】本発明の一実施形態に係るインピーダンス測定部中の主要信号の波形および周波数成分を示す図である。
【図4】本発明の一実施形態に係るインピーダンス測定部が有する定電流生成部の構成を示す回路図である。
【図5】本発明の一実施形態に係るインピーダンス測定部が有する変調回路の構成を示す回路図である。
【図6】本発明の一実施形態に係るインピーダンス測定部が有する復調回路の構成を示す回路図である。
【図7】本発明の一実施形態に係るアンプ部の構成を示す回路図である。
【図8】本発明の一実施形態に係る生体インピーダンス測定装置で取得される心臓のインピーダンスに係る信号の変化を示すタイミングチャートである。
【図9】本発明の一実施形態に係る制御装置の動作の手順を示すフローチャートである。
【図10】図9の各ステップにおけるインピーダンス変動電圧の変化を示すタイミングチャートである。
【図11】従来の心拍出量モニタシステムの構成を示すブロック図である。
【図12】従来の心拍出量モニタシステムで取得される心臓のインピーダンスに係る信号の変化を示すタイミングチャートである。
【発明を実施するための形態】
【0019】
以下、図面を参照し、本発明の実施形態を説明する。
【0020】
<生体インピーダンス測定装置>
図1は、本発明の一実施形態に係る生体インピーダンス測定装置の構成を示している。図1に示す生体インピーダンス測定装置BZ_MEASは、インピーダンス測定部Z_MEASと、アンプ部AMPBと、AD変換装置ADCと、制御装置CPUと、で構成されている。
【0021】
インピーダンス測定部Z_MEASは、測定対象の生体ORGに対して検査電流Icを印加するための第1リード線と、生体ORGに生じた検査電圧Vcを検出するための第2リード線とに接続されている。インピーダンス測定部Z_MEASには、検査電流Icの大きさを制御するための振幅制御信号AMP_SIGが入力されている。また、インピーダンス測定部Z_MEASはアンプ部AMPBにも接続されている。インピーダンス測定部Z_MEASは、定電流を変調した検査電流Icを生体ORGに流して、生体ORGに生じた検査電圧Vcを取得し、生体ORGのインピーダンスに応じた電圧信号である復調電圧DEMOD_Vをアンプ部AMPBに出力する。
【0022】
アンプ部AMPBは、インピーダンス測定部Z_MEASと、AD変換装置ADCと、制御装置CPUと、に接続されており、インピーダンス測定部Z_MEASから入力された復調電圧DEMOD_Vを、補正電圧Vcompを基準に所定の倍率で増幅し、生体ORGのインピーダンスの変動に応じたインピーダンス変動電圧VZ_ACをAD変換装置ADCに出力する。
【0023】
AD変換装置ADCは、アンプ部AMPBと、制御装置CPUと、に接続されており、アンプ部AMPBから入力されるインピーダンス変動電圧VZ_ACをアナログからデジタルにAD変換し、AD変換結果AD_VALを制御装置CPUに出力する。
【0024】
制御装置CPUは、アンプ部AMPBと、インピーダンス測定部Z_MEASと、AD変換装置ADCと、に接続されている。制御装置CPUは、検査電流Icの大きさを制御するための振幅制御信号AMP_SIGをインピーダンス測定部Z_MEASに出力する。また、制御装置CPUは、AD変換装置ADCから入力されたAD変換結果AD_VALに応じて、アンプ部AMPBに出力する補正電圧Vcompおよび振幅制御信号AMP_SIGを調整すると同時に、振幅制御信号AMP_SIGと、AD変換結果AD_VALと、補正電圧VCOMPと、の値を用いて、生体のインピーダンス平均信号Zmeanおよびインピーダンス変化信号Zacの値を計算する。
【0025】
<インピーダンス測定部>
以下、図2、図3、図4、図5、図6を用いてインピーダンス測定部Z_MEASの動作をより詳細に説明する。図2はインピーダンス測定部Z_MEASの構成を示している。図3は、インピーダンス測定部Z_MEAS中の主要信号の波形および周波数成分を示している。図3の(a−1)、(b−1)、(c−1)、(d−1)、(e−1)、(f−1)は、後述する主要信号の波形を表し、横軸は時間、縦軸は信号の振幅を表す。また、図3の(a−2)、(b−2)、(c−2)、(d−2)、(e−2)、(f−2)は、後述する主要信号の周波数成分を表し、横軸は周波数、縦軸はスペクトル強度を表す。図4は、インピーダンス測定部Z_MEASが有する定電流生成部の構成を示している。図5は、インピーダンス測定部Z_MEASが有する変調回路の構成を示している。図6は、インピーダンス測定部Z_MEASが有する復調回路の構成を示している。
【0026】
以下、基本的には図2を用いてインピーダンス測定部Z_MEASの動作を説明するが、必要に応じて図3、図4、図5、図6を引用する。図2に記載の通り、インピーダンス測定部Z_MEASは、定電流生成部I_SUPと、変調回路MOD_CIRと、変調信号生成部MOD_SUPと、復調回路DEMOD_CIR_Iと、で構成されている。
【0027】
定電流生成部I_SUPは、制御装置CPUと、変調回路MOD_CIRと、に接続されており、制御装置CPUから入力される振幅制御信号AMP_SIGに応じた定電流I_constを変調回路MOD_CIRに出力する。定電流生成部I_SUPは具体的には、図4に示すように、演算増幅器M1と、抵抗器R1と、NMOSトランジスタQ1と、を有する定電流回路で構成されており、以下の(1)式で表される定電流I_constを出力する。ただし、VDDは定電流生成部I_SUPに供給されている電源電圧であり、VAMP_SIGは振幅制御信号AMP_SIGの電圧であり、R_constは抵抗器R1の抵抗値である。
I_const=(VDD−VAMP_SIG)/R_const (1)
【0028】
なお、定電流I_constの波形は図3(a−1)に示す通りであり、定電流Iconstは、時間に拠らず一定の値を示す。また、定電流I_constの周波数成分は図3(a−2)に示す通りである。定電流I_constは時間に拠らず一定なため、周波数0にスペクトルのピークを有する。
【0029】
変調信号生成部MOD_SUPは変調回路MOD_CIRに接続されており、測定対象となる生体インピーダンスの変化周波数forgよりも高い変調周波数fmodで信号レベルがハイレベル(以下「H」と記載)とローレベル(以下「L」と記載)で切り替わる矩形波である変調信号MOD_SIGを生成し、変調回路MOD_CIRと復調回路DEMOD_CIF_Iに出力する。なお、変調信号MOD_SIGの波形は図3(b−1)に示す通りである。変調信号MOD_SIGは、周期1/fmodで「H」と「L」が切り替わる。変調信号MOD_SIGのスペクトルは図3(b−2)に示す通り、変調周波数fmodにピークを有する。
【0030】
矩形波である変調信号MOD_SIGをf(t)とおいた場合、そのフーリエ展開は以下の(2)式で表される。
f(t)=(VDD/2)・{sin(2π・fmod・t)+ (1/3)・sin(3・2π・fmod・t)+ (1/5)・sin(5・2π・fmod・t)+・・・} (2)
【0031】
説明を簡略にするため、図3(b−2)には、変調信号MOD_SIGを構成する基本波sin(2π・fmod・t)のスペクトル成分のみを記載している。生体インピーダンス測定装置BZ_MEASの動作原理を説明するためには基本波成分のみの議論で十分なため、以降でも基本波の成分のみを考察する。
【0032】
変調回路MOD_CIRは、定電流生成部I_SUPと、変調信号生成部MOD_SUPと、生体ORGと、に接続されており、定電流I_constと変調信号MOD_SIGとを掛け合わせた信号を検査電流Icとして生体ORGに出力する。変調回路MOD_CIRは具体的には、図5に示すアナログスイッチQ2で構成されており、変調信号MOD_SIGが「H」の場合にオンし、変調信号MOD_SIGが「L」の場合にオフする。なお、検査電流Icの波形は図3(c−1)に示すような矩形波であり、検査電流Icのスペクトルは図3(c−2)に示す通り、変調周波数fmodにピークを有する。検査電流Icの基本周波数成分は以下の(3)式で表される。
I_const×sin(2π・fmod・t) (3)
【0033】
検査電流Icを生体ORGに印加することにより、以下の(4)式で与えられる検査電圧Vcが発生する。ただし、Zcは生体ORGのインピーダンスであり、αは生体インピーダンスが純粋な抵抗成分でない場合に生じる位相ずれである。生体の有する容量成分やインダクタンス成分が抵抗成分に比べて十分に小さい場合、αは無視することができる。なお、検査電圧Vcの波形は図3(d−1)に示す通りである。検査電圧Vcのスペクトルは図3(d−2)に示す通り、変調周波数fmodにピークを有する。
Vc=I_const×|Zc|×sin(2π・fmod・t+α) (4)
【0034】
復調回路DEMOD_CIR_Iは、生体ORGと、変調信号生成部MOD_SUPと、アンプ部AMPBと、に接続されており、検査電圧Vcと変調信号MOD_SIGとを掛け合わせた信号を復調電圧DEMOD_Vとしてアンプ部AMPBに出力する。復調回路DEMOD_CIR_Iは具体的には、図6に示すアナログスイッチQ3で構成されており、変調信号MOD_SIGが「H」の場合にオンし、変調信号MOD_SIGが「L」の場合にオフする。
【0035】
復調電圧DEMOD_Vの基本周波数成分は以下の(5)式で与えられる。
I_const×Zc×sin(2π・fmod・t+α)×sin2π・fmod・t
=(1/2)×I_const×|Zc|{cos(-α)-cos(4π・fmod・t)} (5)
【0036】
なお、復調電圧DEMOD_Vの波形は図3(e−1)に示す通りであり、周波数成分は図3(e−2)に示す通りである。(5)式および図3(e−2)からわかるとおり、生体ORGで発生した電圧信号に基づく復調電圧DEMOD_Vは、cos(-α)の項で表わされるDC成分と、-cos(4π・fmod・t)の項で表わされる、変調周波数fmodの2倍に変調された周波数の成分とを有する。
【0037】
<アンプ部>
以下、図7を用いてアンプ部AMPBについて説明する。アンプ部AMPBは、第1の演算増幅器AMP1と、第2の演算増幅器AMP2と、入力抵抗Rinと、帰還抵抗Rfと、帰還容量Cfと、で構成されている。
【0038】
第1の演算増幅器AMP1の非反転入力端子には復調信号DEMOD_Vが入力され、第1の演算増幅器AMP1の反転入力端子と出力端子が接続されている。第2の演算増幅器AMP2の非反転入力端子には補正電圧Vcompが入力され、第2の演算増幅器AMP2の出力端子からインピーダンス変動電圧VZ_ACが出力される。入力抵抗Rinの第1端子は第1の演算増幅器AMP1の出力端子に接続され、入力抵抗Rinの第2端子は第2の演算増幅器AMP2の反転入力端子に接続されている。
【0039】
帰還抵抗Rfの第1端子は第2の演算増幅器AMP2の反転入力端子に接続され、帰還抵抗Rfの第2端子は第2の演算増幅器AMP2の出力端子に接続されている。帰還容量Cfの第1端子は第2の演算増幅器AMP2の反転入力端子に接続され、帰還容量Cfの第2端子は第2の演算増幅器AMP2の出力端子に接続されている。
【0040】
第1の演算増幅器AMP1はボルテージフォロアとして動作し、比較的高いインピーダンスを有する復調電圧DEMOD_Vをバッファして、入力抵抗Rinの第1端子に出力する。また、第2の演算増幅器AMP2と、入力抵抗Rinと、帰還抵抗Rfと、帰還容量Cfと、は、反転増幅機能を有するローパスフィルタとして動作し、カットオフ周波数fLPFは以下の(6)式で与えられる。
【0041】
【数2】
【0042】
カットオフ周波数fLPFは、変調周波数fmodの基本周波数の2倍よりも小さく、生体インピーダンスの変化周波数fORGよりも大きな値に設定されている。このため、上記のローパスフィルタとしての動作により、(5)式における-cos(4π・fmod・t)の項で表わされる高周波成分が取り除かれる。したがって、アンプ部AMPBで増幅される信号は、(5)式の (1/2)×I_const×|Zc|{cos(-α)}の成分となる。この波形を図3(f−1)に示す。なお、この波形は、変調周波数fmodの変化時間に対応したスケールで描かれており、変調周波数fmodに基づく周期よりも長い周期で変動するインピーダンス変動電圧VZ_ACが時間に応じて変化しないように描かれている。実際のインピーダンス変動電圧VZ_ACは、図8に示すように、生体インピーダンスの変化周波数fORGでゆるやかに変動している。図3(f−2)のインピーダンス変動電圧VZ_ACのスペクトルが示すように、アンプ部AMPBから出力される信号の周波数成分は、ローパスフィルタで高周波成分が取り除かれるため、略DC成分にのみピークを有する。
【0043】
また、アンプ部AMPBは、以下の(7)式が示す特性で信号を増幅する。ただし、Vout:第2の演算増幅器AMP2の出力端子から出力される電圧、Vin:入力抵抗Rinの第1端子に入力される電圧、Vcomp:第2の演算増幅器AMP2の非反転入力端子に入力される電圧である。
【0044】
【数3】
【0045】
ここで、Vin=Vmean+Vacとおくと、(7)式は(8)式のように変形される。
【0046】
【数4】
【0047】
ここで、時間的に変化しない成分を(9)式で示す平均電圧Vaveとすると、(10)式が得られる。
【0048】
【数5】
【0049】
【数6】
【0050】
後で詳細を説明する通り、制御装置CPUは、平均電圧VaveがAD変換装置ADCの入力電圧範囲内(入力ダイナミックレンジ内)に納まるように補正電圧Vcompを調整する。したがって、インピーダンス平均電圧Vmeanがどのような値であっても、補正電圧Vcompを調整することにより、アンプ部AMPBは、平均電圧Vaveを中心としてインピーダンス変化電圧Vacのみを−(Rf/Rin)倍することができる。
【0051】
即ち、制御装置CPUは、(9)式に示す補正電圧Vcompを生成することにより、AD変換装置ADCの入力電圧範囲内でありながら、インピーダンス変化電圧Vacを高ゲインで増幅することができる。このため、AD変換装置ADCの分解能を低くしても、生体インピーダンスの変化に対応する電圧信号の変化を高い分解能で測定することができる。
【0052】
<制御装置>
以下、制御装置CPUが補正電圧Vcompを調整する動作について、図9および図10を用いて説明する。図9は、制御装置CPUが行う基準電圧調整の手順を示している。また、図10は、図9に示した各ステップにおけるインピーダンス変動電圧VZ_ACの波形を示している。
【0053】
(ステップS1)
生体インピーダンス測定装置BZ_MEASが生体ORGに接続されて動作を開始すると、制御装置CPUは、一般的な患者の生体のインピーダンス平均電圧Vmeanおよびインピーダンス変化電圧Vacを検出するのに最適な補正電圧Vcompと振幅制御信号AMP_SIGを出力する。この動作が終わると、処理はステップS2に進む。
【0054】
(ステップS2)
制御装置CPUは、所定の時間(生体のインピーダンス変化の1周期以上の時間)にわたるAD変換結果AD_VALを取り込み、制御装置CPU内部のメモリに保持する。この動作が終わると、処理はステップS3に進む。
【0055】
(ステップS3)
制御装置CPUは、メモリに保持されたAD変換結果AD_VALの値がAD変換装置ADCにおけるAD変換可能電圧の上限値ADC_MAXに達しているか否かを判定する。もし、AD変換結果AD_VALの値がAD変換可能電圧の上限値ADC_MAXに達している場合(例えば図10(a)の波形L1が得られた場合)には処理がステップS4に進み、AD変換結果AD_VALの値がAD変換可能電圧の上限値ADC_MAXに達していない場合(例えば図10(a)の波形L2が得られた場合)には処理がステップS5に進む。
【0056】
(ステップS4)
制御装置CPUは、アンプ部AMPBに印加する補正電圧Vcompを現在の電圧に対して所定の割合だけ減少させる。この制御が行われることにより、例えば図10(a)の波形L1が波形L2に変化し、変動の中心電圧が低下する。この動作が終わると、処理はステップS2に移行する。
【0057】
(ステップS5)
制御装置CPUは、メモリに保持されたAD変換結果AD_VALの値がAD変換装置ADCにおけるAD変換可能電圧の下限値ADC_MINに達しているか否かを判定する。もし、AD変換結果AD_VALの値がAD変換可能電圧の下限値ADC_MINに達している場合(例えば図10(b)の波形L3が得られた場合)には処理がステップS6に進み、AD変換結果AD_VALの値がAD変換可能電圧の下限値ADC_MINに達していない場合(例えば図10(b)の波形L4が得られた場合)には処理がステップS7に進む。
【0058】
(ステップS6)
制御装置CPUは、振幅制御信号AMP_SIGを増加させることにより、定電流I_constを現在の電流に対して所定の割合だけ減少させる。この制御が行われることにより、図10(b)の波形L3が波形L4に変化し、信号の振幅が減少する。この動作が終わると、処理がステップS2に移行する。
【0059】
(ステップS7)
制御装置CPUは、メモリに保持されたAD変換結果AD_VALの値が十分な振幅を有するか否かを判定する。もし、AD変換結果AD_VALの値が数LSB程度しか変化せず、インピーダンス変化電圧Vacを十分な分解能でAD変換できない場合(例えば図10(c)の波形L5が得られた場合)には処理がステップS8に進む。AD変換結果AD_VALの値の変化が十分に大きく、インピーダンス変化電圧Vacを十分な分解能でAD変換できる場合(例えば図10(c)の波形L6が得られた場合)には本制御シーケンスは終了する。
【0060】
(ステップS8)
制御装置CPUは、振幅制御信号AMP_SIGを減少させることにより、定電流I_constを現在の電流に対して所定の割合だけ増加させる。この制御が行われることにより、図10(c)の波形L5が波形L6に変化し、信号の振幅が増加する。この動作が終わると、処理はステップS2に移行する。
【0061】
以上のようなシーケンスにより、生体インピーダンスの変化成分が十分な振幅をもちつつ、その振幅をAD変換装置ADCの入力電圧範囲内(ダイナミックレンジ内)に収めることができる。
【0062】
以下、制御装置CPUにおけるインピーダンス値の計算方法について説明する。制御装置CPUは、補正電圧Vcompと、平均電圧Vaveと、振幅制御信号AMP_SIGと、からインピーダンス平均値信号Zmeanとインピーダンス変化信号Zacを計算する。(9)式を変形すると、インピーダンス平均電圧Vmeanは以下の(11)式で与えられる。
【0063】
【数7】
【0064】
したがって、オームの法則から、インピーダンス平均値信号Zmeanは以下の(12)式で求められる。
Zmean=Vmean/Iconst (12)
【0065】
また、(12)式に(1)式を代入することにより、以下の(13)式が求まる。
Zmean=Vmean/{(VDD−AMP_SIG)×R_const} (13)
【0066】
同様にして、インピーダンス変化信号Zacは以下の(14)式で与えられる。
Zac=Vac/{(VDD−AMP_SIG)×R_const} (14)
【0067】
上述したように、本実施形態の生体インピーダンス測定装置BZ_MEASによれば、制御装置CPUは、生体ORGのインピーダンス変動信号VZ_ACがAD変換装置ADCの入力電圧範囲内に納まるように検査電流Icおよび補正電圧Vcompを調整することにより、インピーダンス変化電圧Vacを高いゲインで増幅することができる。したがって、AD変換装置ADCの有効ビット数が少ない場合でも、十分な分解能で、生体インピーダンスの平均値(Zmean)と生体インピーダンスの変化成分(Zac)を計算することができる。
【0068】
AD変換装置の消費電力Pdを表す(15)式からもわかるとおり、有効ビット数が少ない場合、AD変換装置ADCは小さな消費電力で動作するため、生体インピーダンス測定装置BZ_MEASにおける消費電力を低減させることができる。
【0069】
【数8】
【0070】
したがって、低消費電力を実現しつつ、高い精度で生体インピーダンスの平均値および変化量を検出することができる。また、ローパスフィルタにより所望の帯域外の信号成分を除去できるため、より正確なインピーダンス変動信号VZ_ACを得ることができる。
【0071】
以上、図面を参照して本発明の実施形態について詳述してきたが、具体的な構成は上記の実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0072】
BZ_MEAS・・・生体インピーダンス測定装置、Z_MEAS・・・インピーダンス測定部、AMPB・・・アンプ部、ADC・・・AD変換装置、CPU・・・制御装置、I_SUP・・・定電流生成部、MOD_CIR・・・変調回路、MOD_SUP・・・変調信号生成部、DEMOD_CIR_I・・・復調回路、M1・・・演算増幅器、R1・・・抵抗器、Q1・・・NMOSトランジスタ、Q2,Q3・・・アナログスイッチ、AMP1・・・第1の演算増幅器、AMP2・・・第2の演算増幅器、Rin・・・入力抵抗、Rf・・・帰還抵抗、Cf・・・帰還容量
【特許請求の範囲】
【請求項1】
所定の電流に基づく検査電流を生体に流して、前記生体のインピーダンスに対応する検査電圧を取得するインピーダンス測定部と、
補正電圧を基準に前記検査電圧を増幅するアンプ部と、
前記アンプ部の出力をAD変換するAD変換装置と、
前記AD変換装置のAD変換結果に基づいて、前記アンプ部の出力が前記AD変換装置の入力ダイナミックレンジ内に納まるように前記検査電流および前記補正電圧を制御し、前記所定の電流、前記補正電圧、および前記AD変換結果に基づいて前記生体のインピーダンスの平均値および前記生体のインピーダンスの変化量を計算する制御装置と、
を有する生体インピーダンス測定装置。
【請求項2】
前記アンプ部は、ローパスフィルタを有する請求項1に係る生体インピーダンス測定装置。
【請求項3】
前記インピーダンス測定部は、
前記所定の電流を、生体インピーダンスの変化周波数よりも高い変調周波数を有する変調信号で変調し、前記検査電流を生成する変調回路と、
前記検査電流を生体に印加して得られる測定電圧を復調し、前記検査電圧を生成する復調回路と、
を有し、前記ローパスフィルタは、前記変調回路の変調周波数の2倍よりも小さく、前記生体インピーダンスの変化周波数よりも高い周波数に設定されたカットオフ周波数を有する請求項2に係る生体インピーダンス測定装置。
【請求項4】
前記アンプ部は、
第1の非反転入力端子、第1の反転入力端子、および第1の出力端子を備え、前記第1の非反転入力端子に前記検査電圧が入力され、前記第1の反転入力端子と前記第1の出力端子が接続された第1の演算増幅器と、
第2の非反転入力端子、第2の反転入力端子、および第2の出力端子を備え、前記第2の非反転入力端子に前記補正電圧が入力される第2の演算増幅器と、
第1の端子および第2の端子を備え、前記第1の端子が前記第1の演算増幅器の前記第1の出力端子に接続され、前記第2の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続された入力抵抗と、
第3の端子および第4の端子を備え、前記第3の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第4の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還抵抗と、
第5の端子および第6の端子を備え、前記第5の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第6の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還容量と、
を有する請求項2に記載の生体インピーダンス測定装置。
【請求項1】
所定の電流に基づく検査電流を生体に流して、前記生体のインピーダンスに対応する検査電圧を取得するインピーダンス測定部と、
補正電圧を基準に前記検査電圧を増幅するアンプ部と、
前記アンプ部の出力をAD変換するAD変換装置と、
前記AD変換装置のAD変換結果に基づいて、前記アンプ部の出力が前記AD変換装置の入力ダイナミックレンジ内に納まるように前記検査電流および前記補正電圧を制御し、前記所定の電流、前記補正電圧、および前記AD変換結果に基づいて前記生体のインピーダンスの平均値および前記生体のインピーダンスの変化量を計算する制御装置と、
を有する生体インピーダンス測定装置。
【請求項2】
前記アンプ部は、ローパスフィルタを有する請求項1に係る生体インピーダンス測定装置。
【請求項3】
前記インピーダンス測定部は、
前記所定の電流を、生体インピーダンスの変化周波数よりも高い変調周波数を有する変調信号で変調し、前記検査電流を生成する変調回路と、
前記検査電流を生体に印加して得られる測定電圧を復調し、前記検査電圧を生成する復調回路と、
を有し、前記ローパスフィルタは、前記変調回路の変調周波数の2倍よりも小さく、前記生体インピーダンスの変化周波数よりも高い周波数に設定されたカットオフ周波数を有する請求項2に係る生体インピーダンス測定装置。
【請求項4】
前記アンプ部は、
第1の非反転入力端子、第1の反転入力端子、および第1の出力端子を備え、前記第1の非反転入力端子に前記検査電圧が入力され、前記第1の反転入力端子と前記第1の出力端子が接続された第1の演算増幅器と、
第2の非反転入力端子、第2の反転入力端子、および第2の出力端子を備え、前記第2の非反転入力端子に前記補正電圧が入力される第2の演算増幅器と、
第1の端子および第2の端子を備え、前記第1の端子が前記第1の演算増幅器の前記第1の出力端子に接続され、前記第2の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続された入力抵抗と、
第3の端子および第4の端子を備え、前記第3の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第4の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還抵抗と、
第5の端子および第6の端子を備え、前記第5の端子が前記第2の演算増幅器の前記第2の反転入力端子に接続され、前記第6の端子が前記第2の演算増幅器の前記第2の出力端子に接続された帰還容量と、
を有する請求項2に記載の生体インピーダンス測定装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−157463(P2012−157463A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−18201(P2011−18201)
【出願日】平成23年1月31日(2011.1.31)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年1月31日(2011.1.31)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]