
生体インピーダンス測定装置
【課題】組織の電気インピーダンスの異方性の測定が困難であった。
【解決手段】渦電流発生装置10は、略同心円上に略等間隔に配置された複数の電磁石M1〜M3を備える。電磁石M1〜M3の端面が生体組織2の表面に対向するように配置され、各電磁石M1〜M3がそれぞれのコイルL1〜L3に流れる駆動電流に応じた渦電流を発生させる。渦電流発生装置10は、電磁石M1〜M3が発生させる渦電流の合成電流の方向が、時間とともに変化するように、コイルL1〜L3に流れる駆動電流を変化させる。電位差測定装置30は、生体組織2の表面上に配置された複数の測定用電極e1〜e4を有し、渦電流によって生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する。
【解決手段】渦電流発生装置10は、略同心円上に略等間隔に配置された複数の電磁石M1〜M3を備える。電磁石M1〜M3の端面が生体組織2の表面に対向するように配置され、各電磁石M1〜M3がそれぞれのコイルL1〜L3に流れる駆動電流に応じた渦電流を発生させる。渦電流発生装置10は、電磁石M1〜M3が発生させる渦電流の合成電流の方向が、時間とともに変化するように、コイルL1〜L3に流れる駆動電流を変化させる。電位差測定装置30は、生体組織2の表面上に配置された複数の測定用電極e1〜e4を有し、渦電流によって生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体組織を無侵襲的に測定する技術に関する。
【背景技術】
【0002】
構造が複雑な生体臓器およびそれを構成する各組織は電気的な異方性を有している。電気インピーダンスの異方性の測定により、組織の構成と電気特性に関係した質の情報を得ることが期待されるため、生理学的研究、あるいは臨床応用面のおける価値が高い。
【0003】
生体の電気インピーダンスを測定する方法として、四電極法が知られている。四電極法は、測定対象と電極との不安定な接触抵抗の影響が少ないという利点を有する反面、生体組織の形状の複雑さゆえ、生体断面のどの部分のインピーダンスを測定しているのかが判然とせず、したがって測定された結果と生理現象との対応関係の信頼性が高くないという問題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第1909038号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
生体の電気インピーダンスを測定する手法として、本発明者らは、特許文献1に記載の技術を提案している。しかし同文献に記載の技術では、2つの電磁石の間に生体組織を挟み込む必要があり、その用途には制限があった。
【0006】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、組織の電気インピーダンスの異方性を簡易に測定可能な装置の提供にある。
【課題を解決するための手段】
【0007】
本発明のある態様は、生体組織のインピーダンスを測定する生体インピーダンス測定装置に関する。生体インピーダンス測定装置は、渦電流発生装置と、電位差測定装置と、を備える。渦電流発生装置は、略同心円上に略等間隔に配置されたm個(mは2以上の整数)の電磁石であって、それぞれの端面が生体組織の表面に対向するように配置されるm個の電磁石を有する。各電磁石は、それぞれのコイルに流れる駆動電流に応じた渦電流を発生させる。渦電流発生装置は、生体組織内にm個の電磁石が発生させる渦電流の合成電流の方向が、時間とともに変化するように、m個の電磁石それぞれのコイルに流れる駆動電流を変化させる。電位差測定装置は、生体組織の表面上に配置された複数の測定用電極を有し、渦電流によって生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する。
【0008】
この態様によると、複数の電磁石に駆動電流を供給することにより、生体組織には渦電流が発生する。そしてその渦電流の合成電流の流れる方向は、各電磁石のコイルに与える駆動電流の強さ、あるいは振幅の組み合わせに応じて変化させることができる。したがって生体組織内に、任意の方向で電流を流すことができ、その電流により生ずる電位差を測定用電極のペアを用いて測定することにより、生体インピーダンスの異方性を容易、および/または正確に測定することが可能となる。また、この態様によれば、複数の電磁石の間に試料を挟み込む必要が無いため、従来技術に比べて、幅広い用途に利用できる。
【0009】
m個の電磁石それぞれのコイルには、互いに位相が略(360/m)度シフトした同一周波数の高周波の駆動電流が供給されてもよい。生体組織内には、流れる方向が駆動電流と同期して回転する合成電流が発生してもよい。
【0010】
m=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、各電磁石のコイルには、三相対称高周波の駆動電流が供給されてもよい。
【0011】
渦電流発生装置は、第1周波数を有する高周波キャリア電流を、第1周波数より低い第2周波数を有するm個の変調信号によって振幅変調することによりm個の駆動電流を生成し、m個の駆動電流それぞれをm個の電磁石それぞれのコイルに流すことにより、流れる方向が変調信号と同期して変化する合成電流を生体組織内に発生させてもよい。
【0012】
m=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置されてもよい。m個の変調信号は、位相が互いに120度シフトした第2周波数の三相対称交流の各成分であってもよい。
【0013】
ある態様の電位差測定装置は、生体組織の表面上に配置された複数のキャンセル用電極をさらに有してもよい。2つの測定用電極のペアの間に発生する電位差が実質的にゼロになるように、それと対応するキャンセル用電極のペアの間に通電する高周波電流の振幅と位相を制御し、このキャンセル用電極のペア間に流れた電流値より、対応する測定用電極のペアがなす方向のインピーダンスを測定してもよい。
【0014】
複数の測定用電極は、m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されてもよい。
【0015】
複数の測定用電極および複数のキャンセル用電極の少なくとも一方は、m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されてもよい。
【0016】
ある態様の生体インピーダンス測定装置は、m個の電磁石の第2の端面に、磁気的に共通にカップリングされるフェライトをさらに備えてもよい。フェライトとm個の電磁石の第2の端面の距離が調節可能であってもよい。
この態様によれば、フェライトと電磁石の距離に応じて、電磁石が発生する磁界が生体組織に浸透する深さを調節することができ、深さ方向のインピーダンス分布を測定することが可能となる。
【0017】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を、方法、装置などの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0018】
本発明のある態様によれば、生体組織の電気インピーダンスの異方性を簡易に測定できる。
【図面の簡単な説明】
【0019】
【図1】図1(a)、(b)は、第1の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【図2】図2(a)、(b)は、三相対称高周波の駆動電流および合成電流の向きを示す図である。
【図3】第2の駆動方式を行う駆動部の構成例を示すブロック図である。
【図4】図4(a)、(b)は、図3の駆動部の動作を示す波形図である。
【図5】第2の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【図6】図5の制御回路の構成例を示す回路図である。
【図7】第3の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【図8】第4の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【発明を実施するための形態】
【0020】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
【0021】
(第1の実施の形態)
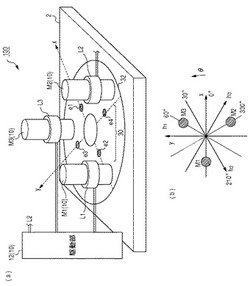
図1(a)、(b)は、第1の実施の形態に係る生体インピーダンス測定装置100の構成を示す図である。生体インピーダンス測定装置100は、生体組織のインピーダンスを測定するために利用される。図1(a)は、生体インピーダンス測定装置100の斜視図であり、図1(b)は上方断面図である。生体インピーダンス測定装置100は、主として、渦電流発生装置10および30を備える。
【0022】
渦電流発生装置10は、複数m個(mは2以上の整数)の電磁石M1〜Mmと、駆動部12を備える。本実施の形態ではm=3の場合を説明するが、本発明はそれに限定されるものではない。
【0023】
複数の電磁石M1〜M3は、略同心円上に略等間隔に配置される。電磁石M1〜M3それぞれの下側の端面は、測定対象の試料(生体組織ともいう)2の表面に対向するように配置される。好ましくは3個の電磁石M1〜M3は空間的に120度ずつ離れた略同心円上に配置される。各電磁石M1〜M3のコイルL1〜L3には、駆動部12から駆動電流IL1〜Il3が供給される。その結果、各電磁石M1〜M3は、試料2内に、駆動電流IL1〜IL3に応じた渦電流を発生させる。
【0024】
駆動部12は、生体組織内に複数の電磁石M1〜M3が発生させる渦電流の合成電流の方向が、時間とともに変化するように、複数の電磁石M1〜M3それぞれのコイルL1〜L3に流れる駆動電流IL1〜IL3を変化させる。
【0025】
図1(b)を参照する。試料2の表面と平行にx−y平面にとるものとする。第1の電磁石M1がθ=180度、第2の電磁石M2がθ=300度、第3の電磁石M3がθ=60度の位置に配置されているとする。このとき、原点O付近の観測点にて第1の電磁石M1が発生する渦電流J1は、コイルL1に流れる電流IL1を用いて、式(1)で与えられる。
J1=k1×IL1×h1 …(1)
ここでh1は、θ=90度の向きを有する単位ベクトルであり、k1は電磁石M1の形状、材料、コイルの巻き数、磁石と観測点の位置関係等によって定まる係数である。
【0026】
同様に、第2の電磁石M1が発生する渦電流J2、第3の電磁石M3が発生する渦電流J3はそれぞれ、コイルL2、L3に流れる電流IL2、IL3を用いて、式(2)、(3)で与えられる。
J2=k2×IL2×h2 …(2)
J3=k3×IL3×h3 …(3)
h2は、θ=210度の向きを有する単位ベクトル、h3はθ=330度の向きを有する単位ベクトルであり、k2、k3は、k1と同様の係数である。
【0027】
観測点において、3つの電磁石M1〜M3が作る渦電流J1〜J3の合成電流Jtotalは、式(4)で与えられる。
Jtotal=Σi=1:mJi=J1+J2+J3
=k1×IL1×h1+k2×IL2×h2+k3×IL3×h3 …(4)
ここで、Σi=1:mJiは、J1からJmの総和を表す。
【0028】
したがって、図1の渦電流発生装置10によれば、駆動電流IL1〜IL3を時々刻々と変化させることにより、合成電流Jtotalの向き、および/または大きさを時々刻々と変化させることができる。
【0029】
続いて、いくつかの好ましい駆動電流IL1〜IL3の発生手法を説明する。
【0030】
(第1の駆動方法)
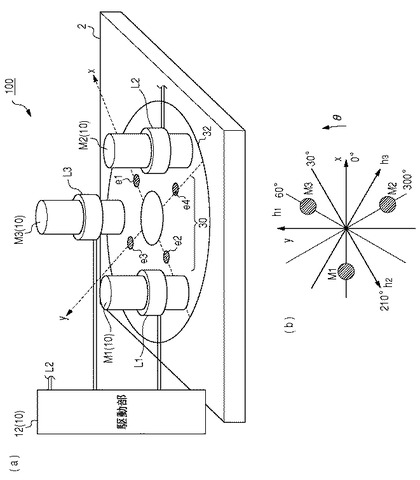
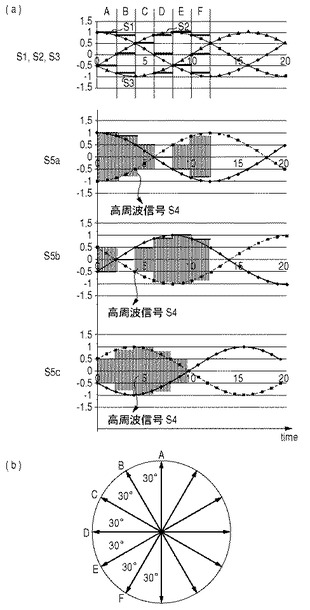
好ましい態様において、駆動部12は、電磁石M1〜M3それぞれのコイルL1〜L3に、互いに位相が略(360/m)度シフトした同一周波数の高周波の駆動電流IL1〜IL3を供給する。つまり各電磁石M1〜M3のコイルL1〜L3には、角周波数ωの三相対称高周波の駆動電流IL1〜IL3が供給される。図2(a)、(b)は、三相対称高周波の駆動電流IL1〜IL3および合成電流Jtotalの向きを示す図である。
IL1=I0・cos(ωt) …(5a)
IL2=I0・cos(ωt−2π/3) …(5b)
IL3=I0・cos(ωt−4π/3) …(5c)
【0031】
いま、観測点が3つの電磁石M1〜M3から等距離にあり、各電磁石の形状、特性が等しいとすれば、k1=k2=k3=kとみなすことができる。このとき式(4)の合成電流Jtotalは、式(6)で与えられる。
Jtotal=k×(IL1×h1+IL2×h2+IL3×h3) …(6)
【0032】
式(6)に、式(5a)〜(5c)を代入すると、式(7)を得る。
Jtotal=k×I0×{h1・cos(ωt)+h2・cos(ωt−2π/3)+h3・cos(ωt−4π/3)} …(7)
【0033】
式(7)の合成電流Jtotalをx成分Jxとy成分Jyに分解すると、式(8a)、(8b)を得る。
Jx=−(3/2)k・I0・sin(ωt) (8a)
Jy=(3/2)k・I0・cos(ωt) (8b)
【0034】
式(8a)、(8b)は、角周波数ωで時々刻々と回転する電流場を表しており、合成電流Jtotalの向きは、θ=ωt[rad]で与えられる。つまり、図1(a)の渦電流発生装置10によれば、生体組織内に、流れる方向が駆動電流IL1〜IL3と同期して回転する合成電流を発生させることができる。
【0035】
図1(a)に戻る。電位差測定装置30は、生体組織(不図示)の表面上に配置された複数の測定用電極e1〜e4を有する。複数の測定用電極e1〜e4の個数は特に限定されず、6個、あるいは8個、それ以上であってもよい。複数の測定用電極e1〜e4は、円盤(ディスク)32上に配置、固定されてもよい。
【0036】
互いに対向する2つの測定用電極e1とe2はペアをなし、e3とe4はペアをなす。上述のように渦電流発生装置10によって合成電流Jtotalを発生させると、その合成電流Jtotalが、インピーダンスを有する生体組織に流れることにより、生体組織の2点間に電位差(電圧降下)が発生する。具体的には、測定用電極e1とe2のペアの間には、オームの法則によりΔVx=Rx×Jxなる電位差が発生し、測定用電極e3とe4の間には、ΔVy=Ry×Jyなる電圧降下が発生する。RxおよびRyは、x方向およびy方向のインピーダンス成分を表す。
【0037】
このように、実施の形態に係る生体インピーダンス測定装置100によれば、対向する測定用電極のペアの間に生ずる電位差ΔVを測定することにより、インピーダンスの異方性を測定することができる。
【0038】
(第2の駆動方法)
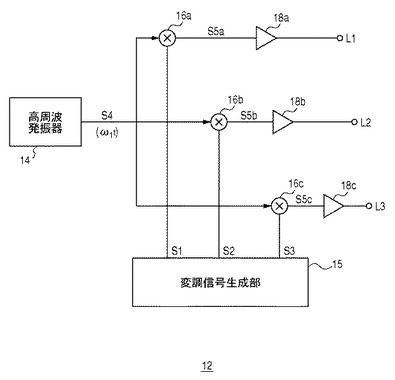
駆動部12は、第1周波数ω1を有する高周波キャリア電流を、第1周波数ω1より低い第2周波数ω2を有するm個の変調信号S1〜Smによって振幅変調することによりm個の駆動電流IL1〜ILmを生成する。そしてm個の駆動電流IL1〜ILmそれぞれを電磁石M1〜MmそれぞれのコイルL1〜Lmに流すことにより、流れる方向が変調信号S1〜Smと同期して変化する合成電流Jtotalを生体組織内に発生させる。
【0039】
図3は、第2の駆動方式を行う駆動部12の構成例を示すブロック図である。高周波発振器14は、第1周波数ω1のキャリア信号S4(=cosω1t)を生成する。変調信号生成部15は、3つの変調信号S1〜S3を生成する。乗算器16a〜16cは、キャリア信号S4に、変調信号S1〜S3を掛け合わせることにより振幅変調する。アンプ18a〜18cは、乗算器16a〜16cの出力S5a〜S5cを、対応するコイルL1〜L3に供給する。
【0040】
好ましい態様においてm=3であって、3個の電磁石M1〜M3は空間的に120度ずつ離れた略同心円上に配置される。m個の変調信号S1〜S3は、位相が互いに120度シフトした第2周波数ω2の三相対称交流の各成分であり、式(9a)〜(9c)で与えられる。
S1=cos(ω2t) …(9a)
S2=cos(ω2t−2π/3) …(9b)
S3=cos(ω2t−4π/3) …(9c)
【0041】
このとき、駆動電流IL1〜IL3は、式(10a)〜(10c)で与えられる。
IL1=I0・cos(ω1t)・cos(ω2t) …(10a)
IL2=I0・cos(ω1t)・cos(ω2t−2π/3) …(10b)
IL3=I0・cos(ω1t)・cos(ω2t−4π/3) …(10c)
【0042】
このとき、合成電流Jtotalのx成分およびy成分はそれぞれ式(11a)、(11b)で与えられる。
Jx=−(3/2)k・I0・cos(ω1t)sin(ω2t) (11a)
Jy=(3/2)k・I0・cos(ω1t)・cos(ω2t) (11b)
【0043】
この駆動方式では、合成電流Jtotalの向きθは、ω2t[rad]で与えられ、第2角周波数ω2と同期して回転する電流場を発生することができる。
【0044】
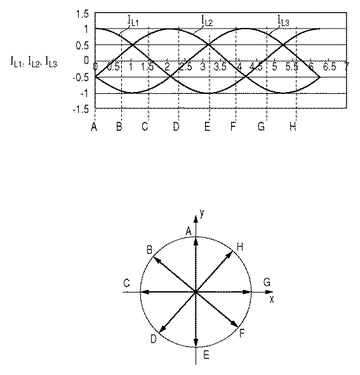
図4(a)、(b)は、図3の駆動部12の動作を示す波形図である。図4(a)に示すように変調信号S1〜S3は、式(9a)〜(9c)で与えられる信号を、量子化(サンプリング)した信号であってもよい。図4(a)では、12倍でサンプリングした信号が用いられる場合を示す。時間区間A〜Fそれぞれにおいて、変調信号S1〜S3は同じレベルをとる。図4(b)に示すように、各時間区間A〜Fにおける合成電流Jtotalの向きは、時間とともに離散的に回転させることができる。
【0045】
なお、変調信号S1〜S3は、必ずしも離散化する必要はなく、三相交流成分をそのまま用いてもよい。
あるいは、変調信号S1〜S3の波形は、図4(a)のそれらに限定されず、たとえば、位相角θをスクランブルしてもよい。言い換えれば時間区間A〜Fの順番を任意に入れ替えてもよい。
【0046】
(第2の実施の形態)
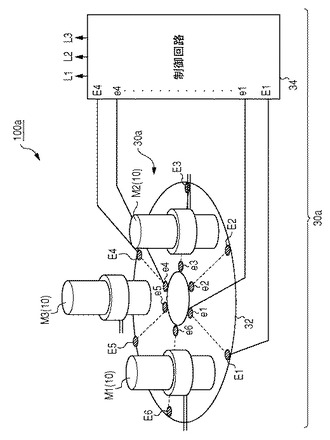
図5は、第2の実施の形態に係る生体インピーダンス測定装置100aの構成を示す図である。生体インピーダンス測定装置100aは、渦電流発生装置10は図1(a)と同様に構成され、電位差測定装置30aの構成が異なっている。なお、図1(a)と共通の構成については図示および説明は省略する。
【0047】
電位差測定装置30aは、複数の測定用電極e1〜e6に加えて、複数のキャンセル用電極(第2の電極)E1〜E6および制御回路34をさらに備える。キャンセル用電極E1〜E6は、測定用電極e1〜e6と同様に、生体組織の表面上に配置される。
【0048】
制御回路34は、複数の測定用電極e1〜e6および複数のキャンセル用電極E1〜E6に接続される。図5では、同一放射線上に配置される電極E1、e1、e4、E4のみが、制御回路34に接続されるように描かれるが、その他の電極も同様に接続される。制御回路34は、コイルL1〜L3に駆動電流IL1〜IL3を供給する駆動部12の機能も有している。
【0049】
図5の生体インピーダンス測定装置100aにおいては、渦電流発生装置10によって、合成電流Jtotalの方向θを変化させる。そして、合成電流Jtotalの方向θに応じて、複数の測定用電極e1〜e6のうち、合成電流Jtotalの方向θに沿って配置される測定用電極e1、e4のペア、e2とe5のペア、e3とe6のペアのいずれかを選択し、選択された測定用電極のペアに生ずる電位差を測定することにより、θ方向のインピーダンスを好適に測定することができる。
【0050】
測定用電極e1〜e6のみを用いた測定では、生体組織の表面付近のインピーダンスを測定できる。以下では、これにキャンセル用電極E1〜E6を組み合わせることにより、生体の表面からより深い部分のインピーダンスを測定する方法を説明する。
【0051】
複数のキャンセル用電極E1〜E6は、複数の測定用電極e1〜e6より外周側に、略同心円上に略等間隔に配置される。そして、互いに対応するi番目のキャンセル用電極Eiと測定用電極eiとは、同じ方向に配置される。また、対向する2つのキャンセル用電極E1とE4、E2とE5、E3とE6はそれぞれペアをなしている。生体のインピーダンスは、キャンセル用電極E1〜E6および測定用電極e1〜e6を組み合わせることにより、以下のように測定することもできる。
【0052】
具体的には、制御回路34は、対向する2つの測定用電極e1とe4のペアの間に発生する電位差ΔVが実質的にゼロになるように、それと対応するキャンセル用電極E1とE4のペアの間に通電する高周波電流の振幅と位相を制御する。
【0053】
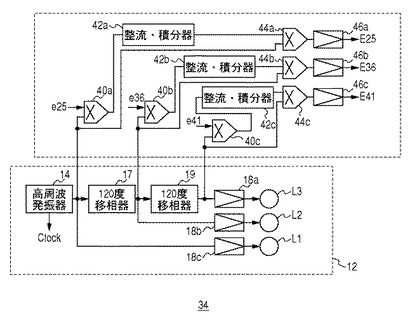
制御回路34としては、特許文献1(特許第1909038号公報)に記載の技術を好適に用いることができる。図6は、図5の制御回路34の構成例を示す回路図である。駆動部12は、高周波発振器14、120度移相器17、19、アンプ18a〜18cを備える。高周波発振器14は、所定の周波数の高周波信号を生成する。移相器17、19は、入力された高周波信号の位相を120度シフトする。アンプ18a〜18cは、位相が120度ずつシフトした3相交流信号を、対応するコイルL1〜L3に出力する。
【0054】
乗算器40a〜40cはそれぞれ、測定用電極のペア(e25、e36、e41)のうち対応するひとつの電位差と、3相交流信号のうち対応するひとつを受け、それらを乗算する。整流・積分器42a〜42cはそれぞれ、対応する乗算器40の出力を整流し、積分する。乗算器44a〜44cはそれぞれ、対応する乗算器40の出力と、三相交流信号のうち対応するひとつを受け、それらを乗算する。アンプ46a〜46cはそれぞれ、対応する乗算器44の出力に応じた信号を、対応するキャンセル用電極E25,E36,E41のいずれかに出力する。制御回路34の動作の詳細については、特許文献1を参照されたい。
【0055】
図5の生体インピーダンス測定装置100aの動作を説明する。
いま、測定用電極e1とe4のペアがなす方向θに、合成電流Jtotalが流れているものとする。このときキャンセル用電極E1とE4のペアの間に電圧を与えることにより、電磁石M1〜M3が発生する合成電流Jtotalと逆向きのキャンセル電流Jcancelが発生する。このキャンセル電流Jcancelは、生体組織の表面付近に流れるため、組織表面付近の合成電流Jtotalを、キャンセル電流Jcancelによってキャンセルすることができる。このときにキャンセル用電極E1とE4のペア間に流れる電流値は、生体組織の深い部分において、方向θのインピーダンスを示す。したがって、図5の生体インピーダンス測定装置100aによれば、キャンセル用電極に流れる電流値にもとづき、生体組織の深い部分のインピーダンスを測定することができる。
【0056】
(第3の実施の形態)
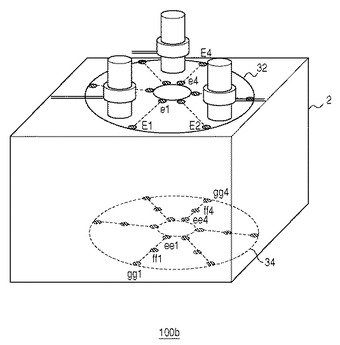
図7は、第3の実施の形態に係る生体インピーダンス測定装置100bの構成を示す図である。第3の実施の形態に係る生体インピーダンス測定装置100bは、第1または第2の実施の形態に係る生体インピーダンス測定装置と組み合わせて利用することができる。
【0057】
生体インピーダンス測定装置100bは、ディスク32上に配置された複数の測定用電極および/またはキャンセル用電極に加えて、複数の測定用電極ee1、ff1、gg1〜ee6、ff6、gg6を備える。複数の測定用電極ee1、ff1、gg1〜ee6、ff6、gg6は、ディスク36上に配置される。
【0058】
生体インピーダンス測定装置100bの動作を説明する。ディスク32とディスク36は、試料2を挟み込むように配置される。つまり、ディスク36上に配置される複数の測定用電極は、電磁石M1〜M3の下側の端面(試料側の端面)がなす面と平行で、深度が異なる面内に設置されることになる。この状態で、ディスク32によって合成電流Jtotalを発生させ、その方向を変化させながら、放射状方向に隣接する測定電極のペア(たとえばee1とff1、gg1とff1、ee4とff4、ff4とgg4)それぞれの間に生ずる電位差を測定することにより、ディスク36が設けられた深さにおけるインピーダンスを測定することができる。
【0059】
なお、第3の実施の形態において、ディスク32側には、キャンセル用電極E1〜E6のみを設け、測定用電極e1〜e6は省略してもよい。
【0060】
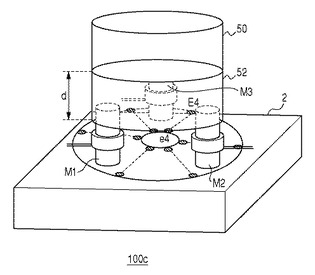
(第4の実施の形態)
図8は、第4の実施の形態に係る生体インピーダンス測定装置100cの構成を示す図である。第4の実施の形態に係る生体インピーダンス測定装置100cは、第1または第2の実施の形態に係る生体インピーダンス測定装置と組み合わせて利用することができる。
【0061】
生体インピーダンス測定装置100bは、フェライト50およびスペーサ52を備える。フェライト50は、複数の電磁石M1〜M3の第2の端面(試料2と反対の面)に、磁気的に共通にカップリングされる。フェライト50と、電磁石M1〜M3の第2の端面の間には、厚みdを有するスペーサ52が挿入される。スペーサ52により、フェライト50と電磁石M1〜M3の距離が調節可能となっている。
【0062】
図7の生体インピーダンス測定装置100cによれば、スペーサ52の厚みdに応じて、試料2の内部の磁界分布を変化させることができ、その結果、合成電流Jtotalが発生する深さを変化させることができる。すなわち、フェライト50と電磁石M1〜M3の距離dを小さくした場合、磁界を試料2の浅層部を集中させることができ、浅い部分のインピーダンスを測定することができる。反対にフェライト50と電磁石M1〜M3の距離dを大きくした場合、磁界を試料2の深層部に集中させることができ、深い部分のインピーダンスを測定することができる。
【0063】
実施の形態にもとづき、具体的な語句を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が認められる。
【符号の説明】
【0064】
100…生体インピーダンス測定装置、10…渦電流発生装置、12…駆動部、30…電位差測定装置、32…ディスク、34…制御回路、36…ディスク、40…乗算器、42…整流・積分器、44…乗算器、46…アンプ、50…フェライト、52…スペーサ、2…試料。
【技術分野】
【0001】
本発明は、生体組織を無侵襲的に測定する技術に関する。
【背景技術】
【0002】
構造が複雑な生体臓器およびそれを構成する各組織は電気的な異方性を有している。電気インピーダンスの異方性の測定により、組織の構成と電気特性に関係した質の情報を得ることが期待されるため、生理学的研究、あるいは臨床応用面のおける価値が高い。
【0003】
生体の電気インピーダンスを測定する方法として、四電極法が知られている。四電極法は、測定対象と電極との不安定な接触抵抗の影響が少ないという利点を有する反面、生体組織の形状の複雑さゆえ、生体断面のどの部分のインピーダンスを測定しているのかが判然とせず、したがって測定された結果と生理現象との対応関係の信頼性が高くないという問題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第1909038号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
生体の電気インピーダンスを測定する手法として、本発明者らは、特許文献1に記載の技術を提案している。しかし同文献に記載の技術では、2つの電磁石の間に生体組織を挟み込む必要があり、その用途には制限があった。
【0006】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、組織の電気インピーダンスの異方性を簡易に測定可能な装置の提供にある。
【課題を解決するための手段】
【0007】
本発明のある態様は、生体組織のインピーダンスを測定する生体インピーダンス測定装置に関する。生体インピーダンス測定装置は、渦電流発生装置と、電位差測定装置と、を備える。渦電流発生装置は、略同心円上に略等間隔に配置されたm個(mは2以上の整数)の電磁石であって、それぞれの端面が生体組織の表面に対向するように配置されるm個の電磁石を有する。各電磁石は、それぞれのコイルに流れる駆動電流に応じた渦電流を発生させる。渦電流発生装置は、生体組織内にm個の電磁石が発生させる渦電流の合成電流の方向が、時間とともに変化するように、m個の電磁石それぞれのコイルに流れる駆動電流を変化させる。電位差測定装置は、生体組織の表面上に配置された複数の測定用電極を有し、渦電流によって生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する。
【0008】
この態様によると、複数の電磁石に駆動電流を供給することにより、生体組織には渦電流が発生する。そしてその渦電流の合成電流の流れる方向は、各電磁石のコイルに与える駆動電流の強さ、あるいは振幅の組み合わせに応じて変化させることができる。したがって生体組織内に、任意の方向で電流を流すことができ、その電流により生ずる電位差を測定用電極のペアを用いて測定することにより、生体インピーダンスの異方性を容易、および/または正確に測定することが可能となる。また、この態様によれば、複数の電磁石の間に試料を挟み込む必要が無いため、従来技術に比べて、幅広い用途に利用できる。
【0009】
m個の電磁石それぞれのコイルには、互いに位相が略(360/m)度シフトした同一周波数の高周波の駆動電流が供給されてもよい。生体組織内には、流れる方向が駆動電流と同期して回転する合成電流が発生してもよい。
【0010】
m=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、各電磁石のコイルには、三相対称高周波の駆動電流が供給されてもよい。
【0011】
渦電流発生装置は、第1周波数を有する高周波キャリア電流を、第1周波数より低い第2周波数を有するm個の変調信号によって振幅変調することによりm個の駆動電流を生成し、m個の駆動電流それぞれをm個の電磁石それぞれのコイルに流すことにより、流れる方向が変調信号と同期して変化する合成電流を生体組織内に発生させてもよい。
【0012】
m=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置されてもよい。m個の変調信号は、位相が互いに120度シフトした第2周波数の三相対称交流の各成分であってもよい。
【0013】
ある態様の電位差測定装置は、生体組織の表面上に配置された複数のキャンセル用電極をさらに有してもよい。2つの測定用電極のペアの間に発生する電位差が実質的にゼロになるように、それと対応するキャンセル用電極のペアの間に通電する高周波電流の振幅と位相を制御し、このキャンセル用電極のペア間に流れた電流値より、対応する測定用電極のペアがなす方向のインピーダンスを測定してもよい。
【0014】
複数の測定用電極は、m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されてもよい。
【0015】
複数の測定用電極および複数のキャンセル用電極の少なくとも一方は、m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されてもよい。
【0016】
ある態様の生体インピーダンス測定装置は、m個の電磁石の第2の端面に、磁気的に共通にカップリングされるフェライトをさらに備えてもよい。フェライトとm個の電磁石の第2の端面の距離が調節可能であってもよい。
この態様によれば、フェライトと電磁石の距離に応じて、電磁石が発生する磁界が生体組織に浸透する深さを調節することができ、深さ方向のインピーダンス分布を測定することが可能となる。
【0017】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を、方法、装置などの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0018】
本発明のある態様によれば、生体組織の電気インピーダンスの異方性を簡易に測定できる。
【図面の簡単な説明】
【0019】
【図1】図1(a)、(b)は、第1の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【図2】図2(a)、(b)は、三相対称高周波の駆動電流および合成電流の向きを示す図である。
【図3】第2の駆動方式を行う駆動部の構成例を示すブロック図である。
【図4】図4(a)、(b)は、図3の駆動部の動作を示す波形図である。
【図5】第2の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【図6】図5の制御回路の構成例を示す回路図である。
【図7】第3の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【図8】第4の実施の形態に係る生体インピーダンス測定装置の構成を示す図である。
【発明を実施するための形態】
【0020】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
【0021】
(第1の実施の形態)
図1(a)、(b)は、第1の実施の形態に係る生体インピーダンス測定装置100の構成を示す図である。生体インピーダンス測定装置100は、生体組織のインピーダンスを測定するために利用される。図1(a)は、生体インピーダンス測定装置100の斜視図であり、図1(b)は上方断面図である。生体インピーダンス測定装置100は、主として、渦電流発生装置10および30を備える。
【0022】
渦電流発生装置10は、複数m個(mは2以上の整数)の電磁石M1〜Mmと、駆動部12を備える。本実施の形態ではm=3の場合を説明するが、本発明はそれに限定されるものではない。
【0023】
複数の電磁石M1〜M3は、略同心円上に略等間隔に配置される。電磁石M1〜M3それぞれの下側の端面は、測定対象の試料(生体組織ともいう)2の表面に対向するように配置される。好ましくは3個の電磁石M1〜M3は空間的に120度ずつ離れた略同心円上に配置される。各電磁石M1〜M3のコイルL1〜L3には、駆動部12から駆動電流IL1〜Il3が供給される。その結果、各電磁石M1〜M3は、試料2内に、駆動電流IL1〜IL3に応じた渦電流を発生させる。
【0024】
駆動部12は、生体組織内に複数の電磁石M1〜M3が発生させる渦電流の合成電流の方向が、時間とともに変化するように、複数の電磁石M1〜M3それぞれのコイルL1〜L3に流れる駆動電流IL1〜IL3を変化させる。
【0025】
図1(b)を参照する。試料2の表面と平行にx−y平面にとるものとする。第1の電磁石M1がθ=180度、第2の電磁石M2がθ=300度、第3の電磁石M3がθ=60度の位置に配置されているとする。このとき、原点O付近の観測点にて第1の電磁石M1が発生する渦電流J1は、コイルL1に流れる電流IL1を用いて、式(1)で与えられる。
J1=k1×IL1×h1 …(1)
ここでh1は、θ=90度の向きを有する単位ベクトルであり、k1は電磁石M1の形状、材料、コイルの巻き数、磁石と観測点の位置関係等によって定まる係数である。
【0026】
同様に、第2の電磁石M1が発生する渦電流J2、第3の電磁石M3が発生する渦電流J3はそれぞれ、コイルL2、L3に流れる電流IL2、IL3を用いて、式(2)、(3)で与えられる。
J2=k2×IL2×h2 …(2)
J3=k3×IL3×h3 …(3)
h2は、θ=210度の向きを有する単位ベクトル、h3はθ=330度の向きを有する単位ベクトルであり、k2、k3は、k1と同様の係数である。
【0027】
観測点において、3つの電磁石M1〜M3が作る渦電流J1〜J3の合成電流Jtotalは、式(4)で与えられる。
Jtotal=Σi=1:mJi=J1+J2+J3
=k1×IL1×h1+k2×IL2×h2+k3×IL3×h3 …(4)
ここで、Σi=1:mJiは、J1からJmの総和を表す。
【0028】
したがって、図1の渦電流発生装置10によれば、駆動電流IL1〜IL3を時々刻々と変化させることにより、合成電流Jtotalの向き、および/または大きさを時々刻々と変化させることができる。
【0029】
続いて、いくつかの好ましい駆動電流IL1〜IL3の発生手法を説明する。
【0030】
(第1の駆動方法)
好ましい態様において、駆動部12は、電磁石M1〜M3それぞれのコイルL1〜L3に、互いに位相が略(360/m)度シフトした同一周波数の高周波の駆動電流IL1〜IL3を供給する。つまり各電磁石M1〜M3のコイルL1〜L3には、角周波数ωの三相対称高周波の駆動電流IL1〜IL3が供給される。図2(a)、(b)は、三相対称高周波の駆動電流IL1〜IL3および合成電流Jtotalの向きを示す図である。
IL1=I0・cos(ωt) …(5a)
IL2=I0・cos(ωt−2π/3) …(5b)
IL3=I0・cos(ωt−4π/3) …(5c)
【0031】
いま、観測点が3つの電磁石M1〜M3から等距離にあり、各電磁石の形状、特性が等しいとすれば、k1=k2=k3=kとみなすことができる。このとき式(4)の合成電流Jtotalは、式(6)で与えられる。
Jtotal=k×(IL1×h1+IL2×h2+IL3×h3) …(6)
【0032】
式(6)に、式(5a)〜(5c)を代入すると、式(7)を得る。
Jtotal=k×I0×{h1・cos(ωt)+h2・cos(ωt−2π/3)+h3・cos(ωt−4π/3)} …(7)
【0033】
式(7)の合成電流Jtotalをx成分Jxとy成分Jyに分解すると、式(8a)、(8b)を得る。
Jx=−(3/2)k・I0・sin(ωt) (8a)
Jy=(3/2)k・I0・cos(ωt) (8b)
【0034】
式(8a)、(8b)は、角周波数ωで時々刻々と回転する電流場を表しており、合成電流Jtotalの向きは、θ=ωt[rad]で与えられる。つまり、図1(a)の渦電流発生装置10によれば、生体組織内に、流れる方向が駆動電流IL1〜IL3と同期して回転する合成電流を発生させることができる。
【0035】
図1(a)に戻る。電位差測定装置30は、生体組織(不図示)の表面上に配置された複数の測定用電極e1〜e4を有する。複数の測定用電極e1〜e4の個数は特に限定されず、6個、あるいは8個、それ以上であってもよい。複数の測定用電極e1〜e4は、円盤(ディスク)32上に配置、固定されてもよい。
【0036】
互いに対向する2つの測定用電極e1とe2はペアをなし、e3とe4はペアをなす。上述のように渦電流発生装置10によって合成電流Jtotalを発生させると、その合成電流Jtotalが、インピーダンスを有する生体組織に流れることにより、生体組織の2点間に電位差(電圧降下)が発生する。具体的には、測定用電極e1とe2のペアの間には、オームの法則によりΔVx=Rx×Jxなる電位差が発生し、測定用電極e3とe4の間には、ΔVy=Ry×Jyなる電圧降下が発生する。RxおよびRyは、x方向およびy方向のインピーダンス成分を表す。
【0037】
このように、実施の形態に係る生体インピーダンス測定装置100によれば、対向する測定用電極のペアの間に生ずる電位差ΔVを測定することにより、インピーダンスの異方性を測定することができる。
【0038】
(第2の駆動方法)
駆動部12は、第1周波数ω1を有する高周波キャリア電流を、第1周波数ω1より低い第2周波数ω2を有するm個の変調信号S1〜Smによって振幅変調することによりm個の駆動電流IL1〜ILmを生成する。そしてm個の駆動電流IL1〜ILmそれぞれを電磁石M1〜MmそれぞれのコイルL1〜Lmに流すことにより、流れる方向が変調信号S1〜Smと同期して変化する合成電流Jtotalを生体組織内に発生させる。
【0039】
図3は、第2の駆動方式を行う駆動部12の構成例を示すブロック図である。高周波発振器14は、第1周波数ω1のキャリア信号S4(=cosω1t)を生成する。変調信号生成部15は、3つの変調信号S1〜S3を生成する。乗算器16a〜16cは、キャリア信号S4に、変調信号S1〜S3を掛け合わせることにより振幅変調する。アンプ18a〜18cは、乗算器16a〜16cの出力S5a〜S5cを、対応するコイルL1〜L3に供給する。
【0040】
好ましい態様においてm=3であって、3個の電磁石M1〜M3は空間的に120度ずつ離れた略同心円上に配置される。m個の変調信号S1〜S3は、位相が互いに120度シフトした第2周波数ω2の三相対称交流の各成分であり、式(9a)〜(9c)で与えられる。
S1=cos(ω2t) …(9a)
S2=cos(ω2t−2π/3) …(9b)
S3=cos(ω2t−4π/3) …(9c)
【0041】
このとき、駆動電流IL1〜IL3は、式(10a)〜(10c)で与えられる。
IL1=I0・cos(ω1t)・cos(ω2t) …(10a)
IL2=I0・cos(ω1t)・cos(ω2t−2π/3) …(10b)
IL3=I0・cos(ω1t)・cos(ω2t−4π/3) …(10c)
【0042】
このとき、合成電流Jtotalのx成分およびy成分はそれぞれ式(11a)、(11b)で与えられる。
Jx=−(3/2)k・I0・cos(ω1t)sin(ω2t) (11a)
Jy=(3/2)k・I0・cos(ω1t)・cos(ω2t) (11b)
【0043】
この駆動方式では、合成電流Jtotalの向きθは、ω2t[rad]で与えられ、第2角周波数ω2と同期して回転する電流場を発生することができる。
【0044】
図4(a)、(b)は、図3の駆動部12の動作を示す波形図である。図4(a)に示すように変調信号S1〜S3は、式(9a)〜(9c)で与えられる信号を、量子化(サンプリング)した信号であってもよい。図4(a)では、12倍でサンプリングした信号が用いられる場合を示す。時間区間A〜Fそれぞれにおいて、変調信号S1〜S3は同じレベルをとる。図4(b)に示すように、各時間区間A〜Fにおける合成電流Jtotalの向きは、時間とともに離散的に回転させることができる。
【0045】
なお、変調信号S1〜S3は、必ずしも離散化する必要はなく、三相交流成分をそのまま用いてもよい。
あるいは、変調信号S1〜S3の波形は、図4(a)のそれらに限定されず、たとえば、位相角θをスクランブルしてもよい。言い換えれば時間区間A〜Fの順番を任意に入れ替えてもよい。
【0046】
(第2の実施の形態)
図5は、第2の実施の形態に係る生体インピーダンス測定装置100aの構成を示す図である。生体インピーダンス測定装置100aは、渦電流発生装置10は図1(a)と同様に構成され、電位差測定装置30aの構成が異なっている。なお、図1(a)と共通の構成については図示および説明は省略する。
【0047】
電位差測定装置30aは、複数の測定用電極e1〜e6に加えて、複数のキャンセル用電極(第2の電極)E1〜E6および制御回路34をさらに備える。キャンセル用電極E1〜E6は、測定用電極e1〜e6と同様に、生体組織の表面上に配置される。
【0048】
制御回路34は、複数の測定用電極e1〜e6および複数のキャンセル用電極E1〜E6に接続される。図5では、同一放射線上に配置される電極E1、e1、e4、E4のみが、制御回路34に接続されるように描かれるが、その他の電極も同様に接続される。制御回路34は、コイルL1〜L3に駆動電流IL1〜IL3を供給する駆動部12の機能も有している。
【0049】
図5の生体インピーダンス測定装置100aにおいては、渦電流発生装置10によって、合成電流Jtotalの方向θを変化させる。そして、合成電流Jtotalの方向θに応じて、複数の測定用電極e1〜e6のうち、合成電流Jtotalの方向θに沿って配置される測定用電極e1、e4のペア、e2とe5のペア、e3とe6のペアのいずれかを選択し、選択された測定用電極のペアに生ずる電位差を測定することにより、θ方向のインピーダンスを好適に測定することができる。
【0050】
測定用電極e1〜e6のみを用いた測定では、生体組織の表面付近のインピーダンスを測定できる。以下では、これにキャンセル用電極E1〜E6を組み合わせることにより、生体の表面からより深い部分のインピーダンスを測定する方法を説明する。
【0051】
複数のキャンセル用電極E1〜E6は、複数の測定用電極e1〜e6より外周側に、略同心円上に略等間隔に配置される。そして、互いに対応するi番目のキャンセル用電極Eiと測定用電極eiとは、同じ方向に配置される。また、対向する2つのキャンセル用電極E1とE4、E2とE5、E3とE6はそれぞれペアをなしている。生体のインピーダンスは、キャンセル用電極E1〜E6および測定用電極e1〜e6を組み合わせることにより、以下のように測定することもできる。
【0052】
具体的には、制御回路34は、対向する2つの測定用電極e1とe4のペアの間に発生する電位差ΔVが実質的にゼロになるように、それと対応するキャンセル用電極E1とE4のペアの間に通電する高周波電流の振幅と位相を制御する。
【0053】
制御回路34としては、特許文献1(特許第1909038号公報)に記載の技術を好適に用いることができる。図6は、図5の制御回路34の構成例を示す回路図である。駆動部12は、高周波発振器14、120度移相器17、19、アンプ18a〜18cを備える。高周波発振器14は、所定の周波数の高周波信号を生成する。移相器17、19は、入力された高周波信号の位相を120度シフトする。アンプ18a〜18cは、位相が120度ずつシフトした3相交流信号を、対応するコイルL1〜L3に出力する。
【0054】
乗算器40a〜40cはそれぞれ、測定用電極のペア(e25、e36、e41)のうち対応するひとつの電位差と、3相交流信号のうち対応するひとつを受け、それらを乗算する。整流・積分器42a〜42cはそれぞれ、対応する乗算器40の出力を整流し、積分する。乗算器44a〜44cはそれぞれ、対応する乗算器40の出力と、三相交流信号のうち対応するひとつを受け、それらを乗算する。アンプ46a〜46cはそれぞれ、対応する乗算器44の出力に応じた信号を、対応するキャンセル用電極E25,E36,E41のいずれかに出力する。制御回路34の動作の詳細については、特許文献1を参照されたい。
【0055】
図5の生体インピーダンス測定装置100aの動作を説明する。
いま、測定用電極e1とe4のペアがなす方向θに、合成電流Jtotalが流れているものとする。このときキャンセル用電極E1とE4のペアの間に電圧を与えることにより、電磁石M1〜M3が発生する合成電流Jtotalと逆向きのキャンセル電流Jcancelが発生する。このキャンセル電流Jcancelは、生体組織の表面付近に流れるため、組織表面付近の合成電流Jtotalを、キャンセル電流Jcancelによってキャンセルすることができる。このときにキャンセル用電極E1とE4のペア間に流れる電流値は、生体組織の深い部分において、方向θのインピーダンスを示す。したがって、図5の生体インピーダンス測定装置100aによれば、キャンセル用電極に流れる電流値にもとづき、生体組織の深い部分のインピーダンスを測定することができる。
【0056】
(第3の実施の形態)
図7は、第3の実施の形態に係る生体インピーダンス測定装置100bの構成を示す図である。第3の実施の形態に係る生体インピーダンス測定装置100bは、第1または第2の実施の形態に係る生体インピーダンス測定装置と組み合わせて利用することができる。
【0057】
生体インピーダンス測定装置100bは、ディスク32上に配置された複数の測定用電極および/またはキャンセル用電極に加えて、複数の測定用電極ee1、ff1、gg1〜ee6、ff6、gg6を備える。複数の測定用電極ee1、ff1、gg1〜ee6、ff6、gg6は、ディスク36上に配置される。
【0058】
生体インピーダンス測定装置100bの動作を説明する。ディスク32とディスク36は、試料2を挟み込むように配置される。つまり、ディスク36上に配置される複数の測定用電極は、電磁石M1〜M3の下側の端面(試料側の端面)がなす面と平行で、深度が異なる面内に設置されることになる。この状態で、ディスク32によって合成電流Jtotalを発生させ、その方向を変化させながら、放射状方向に隣接する測定電極のペア(たとえばee1とff1、gg1とff1、ee4とff4、ff4とgg4)それぞれの間に生ずる電位差を測定することにより、ディスク36が設けられた深さにおけるインピーダンスを測定することができる。
【0059】
なお、第3の実施の形態において、ディスク32側には、キャンセル用電極E1〜E6のみを設け、測定用電極e1〜e6は省略してもよい。
【0060】
(第4の実施の形態)
図8は、第4の実施の形態に係る生体インピーダンス測定装置100cの構成を示す図である。第4の実施の形態に係る生体インピーダンス測定装置100cは、第1または第2の実施の形態に係る生体インピーダンス測定装置と組み合わせて利用することができる。
【0061】
生体インピーダンス測定装置100bは、フェライト50およびスペーサ52を備える。フェライト50は、複数の電磁石M1〜M3の第2の端面(試料2と反対の面)に、磁気的に共通にカップリングされる。フェライト50と、電磁石M1〜M3の第2の端面の間には、厚みdを有するスペーサ52が挿入される。スペーサ52により、フェライト50と電磁石M1〜M3の距離が調節可能となっている。
【0062】
図7の生体インピーダンス測定装置100cによれば、スペーサ52の厚みdに応じて、試料2の内部の磁界分布を変化させることができ、その結果、合成電流Jtotalが発生する深さを変化させることができる。すなわち、フェライト50と電磁石M1〜M3の距離dを小さくした場合、磁界を試料2の浅層部を集中させることができ、浅い部分のインピーダンスを測定することができる。反対にフェライト50と電磁石M1〜M3の距離dを大きくした場合、磁界を試料2の深層部に集中させることができ、深い部分のインピーダンスを測定することができる。
【0063】
実施の形態にもとづき、具体的な語句を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が認められる。
【符号の説明】
【0064】
100…生体インピーダンス測定装置、10…渦電流発生装置、12…駆動部、30…電位差測定装置、32…ディスク、34…制御回路、36…ディスク、40…乗算器、42…整流・積分器、44…乗算器、46…アンプ、50…フェライト、52…スペーサ、2…試料。
【特許請求の範囲】
【請求項1】
生体組織のインピーダンスを測定する生体インピーダンス測定装置であって、
略同心円上に略等間隔に配置されたm個(mは2以上の整数)の電磁石であって、それぞれの端面が前記生体組織の表面に対向するように配置され、各電磁石がそれぞれのコイルに流れる駆動電流に応じた渦電流を発生させる、m個の電磁石を有し、前記生体組織内に前記m個の電磁石が発生させる渦電流の合成電流の方向が、時間とともに変化するように、前記m個の電磁石それぞれのコイルに流れる駆動電流を変化させる渦電流発生装置と、
生体組織の表面上に配置された複数の測定用電極を有し、前記渦電流によって前記生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する電位差測定装置と、
を備えることを特徴とする生体インピーダンス測定装置。
【請求項2】
前記m個の電磁石それぞれのコイルには、互いに位相が略(360/M)度シフトした同一周波数の高周波の駆動電流が供給され、前記生体組織内には、流れる方向が前記駆動電流と同期して回転する前記合成電流が発生することを特徴とする請求項1に記載の生体インピーダンス測定装置。
【請求項3】
M=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、各電磁石のコイルには、三相対称高周波の駆動電流が供給されることを特徴とする請求項2に記載の生体インピーダンス測定装置。
【請求項4】
前記渦電流発生装置は、第1周波数を有する高周波キャリア電流を、前記第1周波数より低い第2周波数を有するm個の変調信号によって振幅変調することによりm個の駆動電流を生成し、m個の駆動電流それぞれを前記m個の電磁石それぞれのコイルに流すことにより、流れる方向が前記変調信号と同期して変化する前記合成電流を前記生体組織内に発生させることを特徴とする請求項1に記載の生体インピーダンス測定装置。
【請求項5】
M=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、前記m個の変調信号は、位相が互いに120度シフトした前記第2周波数の三相対称交流の各成分であることを特徴とする請求項4に記載の生体インピーダンス測定装置。
【請求項6】
前記電位差測定装置は、
生体組織の表面上に配置された複数のキャンセル用電極をさらに有し、
対向する2つの測定用電極のペアの間に発生する電位差が実質的にゼロになるように、それと対応するキャンセル用電極のペアの間に通電する高周波電流の振幅と位相を制御し、このキャンセル用電極のペア間に流れた電流値より、対応する測定用電極のペアがなす方向のインピーダンスを測定することを特徴とする請求項1から5のいずれかに記載の生体インピーダンス測定装置。
【請求項7】
前記複数の測定用電極は、前記m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されることを特徴とする請求項1に記載の生体インピーダンス測定装置。
【請求項8】
前記複数の測定用電極および前記複数のキャンセル用電極の少なくとも一方は、前記m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されることを特徴とする請求項6に記載の生体インピーダンス測定装置。
【請求項9】
前記m個の電磁石の第2の端面に、磁気的に共通にカップリングされるフェライトをさらに備え、当該フェライトと前記m個の電磁石の第2の端面の距離が調節可能であることを特徴とする請求項1から8のいずれかに記載の生体インピーダンス測定装置。
【請求項1】
生体組織のインピーダンスを測定する生体インピーダンス測定装置であって、
略同心円上に略等間隔に配置されたm個(mは2以上の整数)の電磁石であって、それぞれの端面が前記生体組織の表面に対向するように配置され、各電磁石がそれぞれのコイルに流れる駆動電流に応じた渦電流を発生させる、m個の電磁石を有し、前記生体組織内に前記m個の電磁石が発生させる渦電流の合成電流の方向が、時間とともに変化するように、前記m個の電磁石それぞれのコイルに流れる駆動電流を変化させる渦電流発生装置と、
生体組織の表面上に配置された複数の測定用電極を有し、前記渦電流によって前記生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する電位差測定装置と、
を備えることを特徴とする生体インピーダンス測定装置。
【請求項2】
前記m個の電磁石それぞれのコイルには、互いに位相が略(360/M)度シフトした同一周波数の高周波の駆動電流が供給され、前記生体組織内には、流れる方向が前記駆動電流と同期して回転する前記合成電流が発生することを特徴とする請求項1に記載の生体インピーダンス測定装置。
【請求項3】
M=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、各電磁石のコイルには、三相対称高周波の駆動電流が供給されることを特徴とする請求項2に記載の生体インピーダンス測定装置。
【請求項4】
前記渦電流発生装置は、第1周波数を有する高周波キャリア電流を、前記第1周波数より低い第2周波数を有するm個の変調信号によって振幅変調することによりm個の駆動電流を生成し、m個の駆動電流それぞれを前記m個の電磁石それぞれのコイルに流すことにより、流れる方向が前記変調信号と同期して変化する前記合成電流を前記生体組織内に発生させることを特徴とする請求項1に記載の生体インピーダンス測定装置。
【請求項5】
M=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、前記m個の変調信号は、位相が互いに120度シフトした前記第2周波数の三相対称交流の各成分であることを特徴とする請求項4に記載の生体インピーダンス測定装置。
【請求項6】
前記電位差測定装置は、
生体組織の表面上に配置された複数のキャンセル用電極をさらに有し、
対向する2つの測定用電極のペアの間に発生する電位差が実質的にゼロになるように、それと対応するキャンセル用電極のペアの間に通電する高周波電流の振幅と位相を制御し、このキャンセル用電極のペア間に流れた電流値より、対応する測定用電極のペアがなす方向のインピーダンスを測定することを特徴とする請求項1から5のいずれかに記載の生体インピーダンス測定装置。
【請求項7】
前記複数の測定用電極は、前記m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されることを特徴とする請求項1に記載の生体インピーダンス測定装置。
【請求項8】
前記複数の測定用電極および前記複数のキャンセル用電極の少なくとも一方は、前記m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されることを特徴とする請求項6に記載の生体インピーダンス測定装置。
【請求項9】
前記m個の電磁石の第2の端面に、磁気的に共通にカップリングされるフェライトをさらに備え、当該フェライトと前記m個の電磁石の第2の端面の距離が調節可能であることを特徴とする請求項1から8のいずれかに記載の生体インピーダンス測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−205604(P2012−205604A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−58885(P2011−58885)
【出願日】平成23年3月17日(2011.3.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年度、独立行政法人科学技術振興機構 先端計測分析技術・機器開発事業、「低価格脳機能異常部位表示装置の開発」産業技術力強化法第19条の適用を受ける特許出願
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月17日(2011.3.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年度、独立行政法人科学技術振興機構 先端計測分析技術・機器開発事業、「低価格脳機能異常部位表示装置の開発」産業技術力強化法第19条の適用を受ける特許出願
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]