
生体信号推定装置及びプログラム
【課題】車両の運転者の生体信号を精度良く推定することができるようにする。
【解決手段】生体信号検出部12により生体信号を出力する。加速度検出部14により加速度信号を出力する。高速フーリエ変換演算部22によって、生体信号及び加速度信号に対して高速フーリエ変換を行う。カルマンフィルタ演算部24によって、加速度信号の各周波数成分に基づいて、生体信号の周波数毎に、カルマンフィルタで用いられる観測雑音の共分散を決定し、カルマンゲインを算出する。生体信号の周波数成分を観測値として、各周波数毎に、算出されたカルマンゲインを用いたカルマンフィルタに従って、運転者の生体信号を推定する。
【解決手段】生体信号検出部12により生体信号を出力する。加速度検出部14により加速度信号を出力する。高速フーリエ変換演算部22によって、生体信号及び加速度信号に対して高速フーリエ変換を行う。カルマンフィルタ演算部24によって、加速度信号の各周波数成分に基づいて、生体信号の周波数毎に、カルマンフィルタで用いられる観測雑音の共分散を決定し、カルマンゲインを算出する。生体信号の周波数成分を観測値として、各周波数毎に、算出されたカルマンゲインを用いたカルマンフィルタに従って、運転者の生体信号を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体信号推定装置及びプログラムに係り、特に、生体センサからの出力信号に基づいて、運転者の生体信号を推定する生体信号推定装置及びプログラムに関する。
【背景技術】
【0002】
従来より、車両の運転者の状況推定のため、運転者の生体信号を計測する技術が多く開発されている(例えば、特許文献1〜特許文献5)。
【0003】
特許文献1では、ステアリングに設置した電極により、運転操作を行う運転者の両手の電位を計測する技術が開示されている。また、特許文献2では静電容量型の心電計による運転者の心拍を計測する技術が開示されている。さらに、特許文献3では電波式ドップラ法を用いて運転者の心拍に伴う人体表面の振動を計測する方法が開示されている。特許文献4では電波式ドップラ法を用いて心拍及び呼吸を計測する方法が開示されている。
【0004】
しかし、走行中の車内において運転者の生体信号を計測する際は、車両を介して運転者及び計測装置に加わる環境雑音、運転者の能動的な体動(運転操作等)に伴う雑音など、種々の雑音が混入されるため、雑音に対してロバストな信号処理技術が必要とされる。特許文献5では、車両の加速度に応じてマップから生体信号の補正量を抽出し、加速度の影響を補正する手法を提案している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−102188号公報
【特許文献2】特開2007−82938号公報
【特許文献3】特開2006−55504号公報
【特許文献4】特表2006−510880号公報
【特許文献5】特開2009−213636号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の特許文献5では、車両加速度により生体信号に混入する雑音を抑制するため、加速度に応じたマップを適用する手法が開示されている。上記の特許文献5に記載の手法では、車両を介して運転者及び計測装置に加わる環境雑音を低減させることは出来るが、運転者の能動的な体動(運転操作等)に伴う雑音を低減させることはできない。また、車両の加速度によって生体信号に加わる雑音は、運転者の姿勢等によって異なるため、事前に用意したマップだけでは対応できない場合も多い。
【0007】
本発明は、上述した事情を考慮して成されたものであり、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる生体信号推定装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明の生体信号推定装置は、車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサと、前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段と、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段と、前記生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段と、を含んで構成されている。
【0009】
本発明のプログラムは、コンピュータを、前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段、及び車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段として機能させるためのプログラムである。
【0010】
本発明によれば、生体センサによって、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する。計測手段によって、前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する。
【0011】
そして、カルマンゲイン算出手段によって、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出する。生体信号推定手段によって、前記生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する。
【0012】
このように、計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、観測雑音の共分散を決定して、カルマンゲインを算出し、カルマンフィルタに従って、運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0013】
本発明に係るカルマンゲイン算出手段は、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方が大きいほど、前記観測雑音の共分散が大きくなるように決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するようにすることができる。
【0014】
本発明に係る生体信号推定装置は、前記生体センサによって出力された出力信号、及び前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の各々に対して、周波数分析を行う周波数分析手段を更に含み、前記カルマンゲイン算出手段は、周波数の各組み合わせについて、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の予め求められた影響度合いと、前記周波数分析手段による前記操作量及び前記運動状態量の少なくとも一方の周波数分析の結果とに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定するようにすることができる。また、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の影響度合いを、周波数が近いほど大きくなるように予め求めることができる。
【0015】
本発明に係る生体信号推定装置は、前記生体センサによって出力された出力信号に対して、周波数分析を行う周波数分析手段を更に含み、前記カルマンゲイン算出手段は、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の大きさの各範囲との間の予め求められた影響度合いと、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の大きさとに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定するようにすることができる。
【0016】
本発明に係る計測手段は、前記運動状態量として、前記車両の加速度を計測するようにすることができる。
【0017】
本発明に係る計測手段は、前記操作量として、ステアリング角速度及びペダル角速度の少なくとも一方を計測するようにすることができる。
【0018】
本発明に係る生体信号推定手段は、時刻t−1までの出力信号の時系列に基づいて、現時刻tにおける状態ベクトルxt|t-1を予測し、現時刻tにおける観測値としての出力信号ytと、前記予測された状態ベクトルxt|t-1と、現時刻tについて算出されたカルマンゲインKtとに基づいて、現時刻tにおける状態ベクトルxt|tを更新し、現時刻tにおける状態ベクトルxt|tに基づいて、現時刻tにおける観測状態を含まない生体信号を推定するようにすることができる。
【0019】
なお、上記の発明のプログラムを記憶する記憶媒体は、特に限定されず、ハードディスクであってもよいし、ROMであってもよい。また、CD−ROMやDVDディスク、光磁気ディスクやICカードであってもよい。更にまた、該プログラムを、ネットワークに接続されたサーバ等からダウンロードするようにしてもよい。
【発明の効果】
【0020】
以上説明したように、本発明に係る生体信号推定装置及びプログラムによれば、計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、観測雑音の共分散を決定して、カルマンゲインを算出し、カルマンフィルタに従って、運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる、という効果が得られる。
【図面の簡単な説明】
【0021】
【図1】第1の実施の形態に係る生体信号推定装置の構成を示すブロック図である。
【図2】生体信号検出部を配置した様子を示す図である。
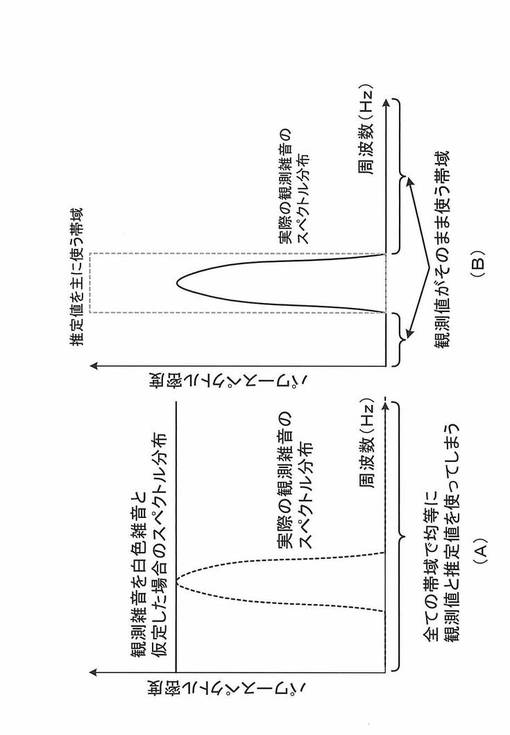
【図3】(A)観測雑音を白色雑音と仮定した場合を示す図、及び(B)車両加速度の影響を受けやすい周波数帯域を考慮した場合を示す図である。
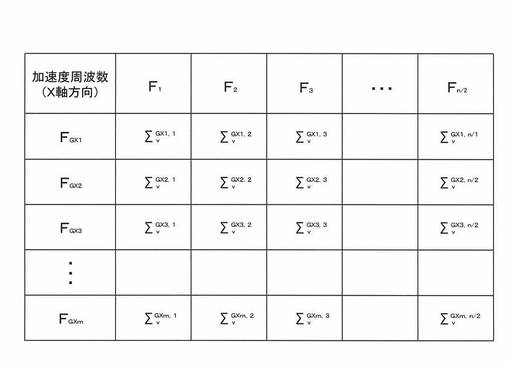
【図4】対照表を示す図である。
【図5】第1の実施の形態の生体信号推定装置における生体信号推定処理ルーチンの内容を示すフローチャートである。
【図6】対照表を示す図である。
【図7】第3の実施の形態に係る生体信号推定装置の構成を示すブロック図である。
【図8】生体信号検出部及びステアリング角速度検出部を配置した様子を示す図である。
【図9】対照表を示す図である。
【図10】第4の実施の形態に係る生体信号推定装置の構成を示すブロック図である。
【図11】生体信号検出部及びペダル角速度検出部を配置した様子を示す図である。
【図12】対照表を示す図である。
【発明を実施するための形態】
【0022】
以下、図面を参照して本発明の実施の形態を詳細に説明する。まず、第1の実施の形態では、運転者の生体信号を推定する生体信号推定装置に本発明を適用した場合について説明する。
【0023】
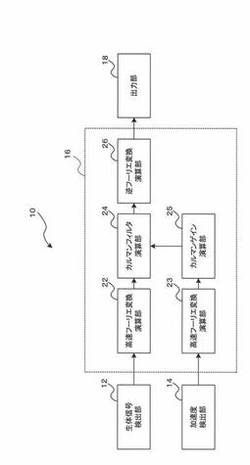
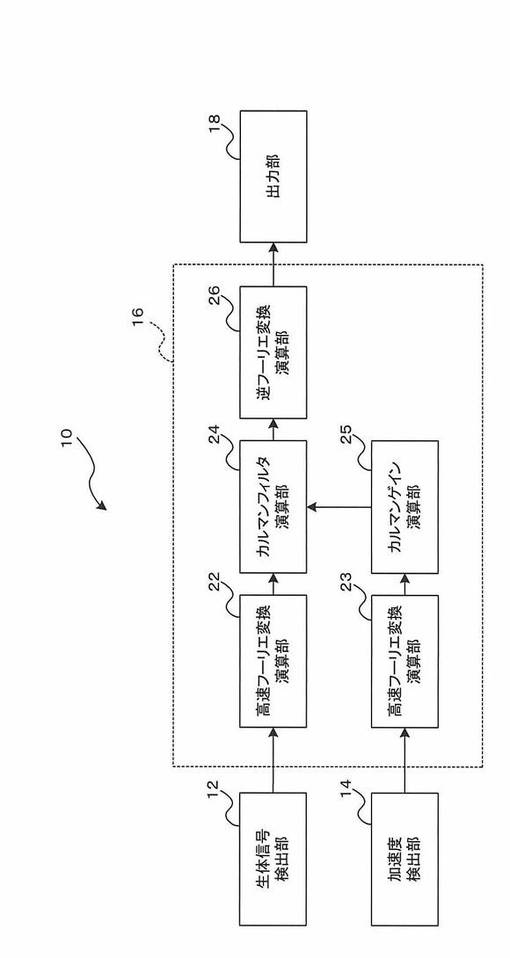
図1に示すように、第1の実施の形態に係る生体信号推定装置10は、生体信号検出部12と、加速度検出部14と、コンピュータ16と、出力部18とを備えている。図2に示すように、生体信号検出部12は、車両側(例えば、シート)に取り付けられ、運転者20の表面振動を検出し、検出された表面振動に応じた生体信号を出力する。生体信号検出部12は、サンプリング周期Δt[秒]で、運転者20のセンサ側の表面振動を検出し、生体信号を出力する。生体信号検出部12としては、例えば、レーダドップラセンサや定在波レーダ等の電波式センサ、圧電素子やPVDF圧力センサ等の圧力センサ、加速度センサ等を用いることができる。
【0024】
加速度検出部14は、車両を構成する部材に固定されており、車両の3軸加速度を検出し、検出した加速度に応じた加速度信号を出力する。なお、加速度検出部14は、計測手段の一例である。
【0025】
コンピュータ16は、生体信号検出部12から出力された生体信号及び加速度検出部14によって出力された加速度信号に基づいて、運転者20の表面振動から生体信号を推定し、出力部18により推定結果を出力する。なお、推定される生体信号は、例えば、心拍、心音、脈波、呼吸、呼吸音等である。
【0026】
コンピュータ16は、生体信号推定装置10全体の制御を司るCPU、後述する生体信号推定処理ルーチンのプログラム等を記憶した記憶媒体としてのROM、ワークエリアとしてデータを一時格納するRAM、及びこれらを接続するバスを含んで構成されている。このような構成の場合には、各構成要素の機能を実現するためのプログラムをROMやHDD等の記憶媒体に記憶しておき、これをCPUが実行することによって、各機能が実現されるようにする。
【0027】
このコンピュータ16をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、図1に示すように、生体信号検出部12から出力された生体信号に対して、高速フーリエ変換を行う高速フーリエ変換演算部22と、加速度検出部14によって出力された加速度信号に対して、高速フーリエ変換を行う高速フーリエ変換演算部23と、カルマンフィルタを用いて、生体信号の各周波数成分を推定するカルマンフィルタ演算部24と、加速度信号の各周波数成分に応じてカルマンゲインを演算するカルマンゲイン演算部25と、生体信号の各周波数成分に対して逆高速フーリエ変換を行って、生体信号を演算する逆フーリエ変換演算部26と、を備えている。高速フーリエ変換演算部22が、周波数分析手段の一例であり、カルマンゲイン演算部25は、カルマンゲイン算出手段の一例であり、カルマンフィルタ演算部24及び逆フーリエ変換演算部26は、生体信号推定手段の一例である。
【0028】
高速フーリエ変換演算部22は、入力された生体信号の時系列から、現時刻tにおける直近n点の生体信号を抽出し、高速フーリエ変換を行う。
【0029】
サンプリングレートΔtでサンプリングされた時刻tから前方n点の生体信号Stを以下の式のように定義する。ただし、nは偶数とし、Δt=1とする。
【0030】
【数1】

Stを高速フーリエ変換すると、n点の離散フーリエ変換(DFT)が得られるが、冗長な部分が含まれているので、冗長な部分を除いたn/2点のDFTを振幅と位相に分け、振幅をSAti、位相をSPtiとし、その時の周波数をFi[Hz]とする。ただしi=1、2、…、n/2である。
【0031】
高速フーリエ変換演算部22は、n/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを出力する。
【0032】
また、高速フーリエ変換演算部23は、X軸方向、Y軸方向、及びZ軸方向の3軸の加速度各々について、入力された加速度信号の時系列より、現時刻tにおける直近の加速度信号を抽出し、高速フーリエ変換を行い、m点の周波数FGXj(j=1、2、…、m)でのパワースペクトル密度PSDGXjを算出する。また、Y軸方向、Z軸方向についてもそれぞれ同様に、m点の周波数FGYj、FGZjでのパワースペクトル密度PSDGYj、PSDGZjを算出する。
【0033】
カルマンフィルタ演算部24は、周波数Fiごとにカルマンフィルタを用いた状態推定を行う。本実施の形態で用いるカルマンフィルタは、以下の(1)式〜(3)式で表される確率線形システムに基づいている。ただし、生体信号Stに含まれる任意の周波数Fi[Hz]の観測雑音がないと仮定した時の生体信号の振幅をAtiとし、位相をPtiとする。
【0034】
【数2】
また、Ftは状態遷移行列、Gtは駆動行列である。wtはシステム雑音ベクトル、ytは観測値、Htは観測行列、vtは観測雑音ベクトルである。生体信号検出部12で検出する誤差が含まれる生体信号の時刻tにおける前方n点の高速フーリエ変換を観測値ytとする。
【0035】
また、システム雑音ベクトルwtは生体信号に依存する雑音であり、駆動行列Gtもシステム雑音に依存して決まると考えられる。一方、観測雑音ベクトルvtは、生体に外力が加わる事による振動や生体の動作に伴う体動による雑音が含まれる。
【0036】
カルマンフィルタ演算部24は、以下の(A)、(B)、(E)、(F)の手順で状態推定を行う。
(A)時刻t−1において更新された状態ベクトル^xt−1|t−1より、以下の(4)式に従って、現時刻tにおける状態ベクトル^xt|t-1を予測する。
【0037】
【数3】
ここで、^xt|t-1は、時刻t−1までの観測値yt-1がわかっている時のxtの推定値であり、^xt−1|t−1は、時刻t−1までの観測値yt-1がわかっている時のxt-1の推定値である。
(B)以下の(5)式に従って、^xt|t−1の誤差の共分散行列Σt|t−1を予測する。
【0038】
【数4】
ただし、Σwt−1は、システム雑音雑音ベクトルwt-1の共分散行列である。
(C)カルマンゲイン演算部25は、観測雑音ベクトルvtの共分散行列Σvtを決定する。観測雑音vtの共分散行列Σvtは、後述するように、加速度検出部14より出力された加速度信号に応じて決定される。
(D)カルマンゲイン演算部25は、以下の(6)式に従って、カルマンゲインKtを算出する。
【0039】
【数5】
(E)現時刻tにおいて実際に観測された観測ベクトルyi=[SAti,SPit]Tを用い、以下の(7)式に従って、現時刻tにおける状態ベクトル^xt|tを更新する。
【0040】
【数6】
(F)以下の(8)式に従って、^xt|tの共分散Σt|tを更新する。
【0041】
【数7】
以上の手順により出力された^xt|tの第一要素は、観測雑音がないと仮定した時の周波数Fiにおける生体信号の振幅の推定値であり、第二要素は、周波数Fiにおける生体信号の位相の推定値である。上記の手順を、周波数Fiごとに行うことにより、生体信号の振幅配列、及び生体信号の位相配列を得ることができる。なお、生体信号の解析に必要な周波数帯域が限定されている場合は、解析が不要な周波数帯域の周波数Fiについてカルマンフィルタを用いた状態推定を行う必要はない。
【0042】
ここで、上記(C)手順において、観測雑音の共分散行列を決定する原理について説明する。
【0043】
カルマンフィルタを用いた信号処理を行う場合、観測雑音vtの共分散行列Σvtが不明なことがほとんどである。そのため、従来は観測雑音vtが適当なエネルギーを有する白色雑音であると仮定して共分散行列Σvtを求めて、求められた共分散行列Σvtよりカルマンゲインを決定することが多かった。
【0044】
ここで、あるシステムにおいて、観測雑音vtのパワースペクトル密度が図3(A)に示すように偏っていた場合を考えると、観測雑音vtが白色雑音であると仮定してカルマンゲインを設定した場合には、本来観測雑音vtの影響を受けない帯域の観測値まで推定値と置き換えて信号処理することとなり、観測値を活かしきれない、という問題点がある。
【0045】
人体に振動が加わった場合、振動の一部の周波数は人体によく伝播し、人体を大きく動揺させるが、他の周波数の振動は人体の振動に影響を与えにくいことが知られている(いわゆる共振周波数)。これは、車両加速度に対する人体の振動の影響についても同様である。そこで、車両加速度の周波数分布(各周波数成分)に応じて、各周波数毎に観測雑音の共分散行列を設定して、カルマンゲインを決定することにより、図3(B)に示すように、車両加速度の影響を受けやすい周波数帯域は推定値を使い、影響を受けにくい帯域は観測値を使うようにカルマンゲインを設定することが可能になる。これにより、「観測雑音の影響を受けにくい帯域も推定値を使うことにより観測値を活かしきれない」という従来技術の問題点を解決することができる。
【0046】
以上の理由により、車両加速度により、観測雑音が多く含まれている周波数帯域を推定し、その帯域の信号はカルマンフィルタによる推定値を多く用い、それ以外の帯域では観測値を多く用いることにより、雑音の少ない周波数帯域の生体信号を残したまま、雑音を低減することが可能になり、生体信号の推定精度を上げることができる。
【0047】
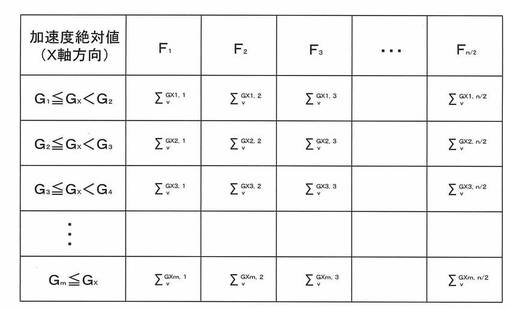
そこで、本実施の形態では、カルマンゲイン演算部25が、以下のように、各周波数Fiに対して、観測雑音vtの共分散行列Σvtを、加速度検出部14より出力された加速度信号の周波数分布に応じて決定する。まず、X軸方向の加速度について、図4に示すような、m点の周波数FGXj(j=1、2、…、m)において単位パワースペクトル密度の振動が加わった場合の、周波数Fiの生体信号の影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列ΣvGXi,jを格納した対照表を予め用意しておく。当該対照表では、生体信号の周波数Fiと、加速度信号の周波数FGXjが近いほど、影響度合いが大きいため、当該周波数の組み合わせに対応する観測雑音vtの共分散行列ΣvGXj,tの値として大きい値が格納されている。当該対照表を用いて、対象の周波数Fiと各周波数FGXjの組み合わせに対する、観測雑音vtの共分散行列ΣvGXi,jと、パワースペクトル密度PSDGXjにより、X軸の加速度に伴うΣvtGXを決定する。
【0048】
Σvt GXは、以下の式に示すように、ΣvGXi,jと、周波数FGXjのパワースペクトル密度PSDGXjの積をi=1,・・・,n/2,j=1,・・・,mで足し合わせることによって求められる。
【0049】
【数8】
これによって、周波数FGXj(j=1、2、…、m)において単位パワースペクトル密度が大きいほど、観測雑音vtの共分散行列ΣvtGXが大きくなるように決定される。
【0050】
また、同様にして、Y軸方向についてΣvtGY、Z軸方向についてΣvtGZを求める。以上より、求められたΣvtGX、ΣvtGY及びΣvtGZの和をΣvtとして決定する。
【0051】
上記図4に示した対照表は、例えば、本実施の形態に係る生体信号推定装置10を備えた車両、または本発明に関連する部分(生体信号検出部12や加速度検出部14、運転者が搭乗するシート等及びその接合構造が保持されていること)を複数の周波数で加振し、その時の運転者の振動特性を計測することで得ることができる。
【0052】
逆フーリエ変換演算部26は、カルマンフィルタ演算部24により推定された生体信号の周波数配列、生体信号の振幅配列、及び生体信号の位相配列に対し、逆高速フーリエ変換を行うことにより、雑音を除去した生体信号を演算し、出力部18により、演算された生体信号が示す生体信号を推定結果として外部に対して出力する。
【0053】
次に、第1の実施の形態の生体信号推定装置10の作用について説明する。
【0054】
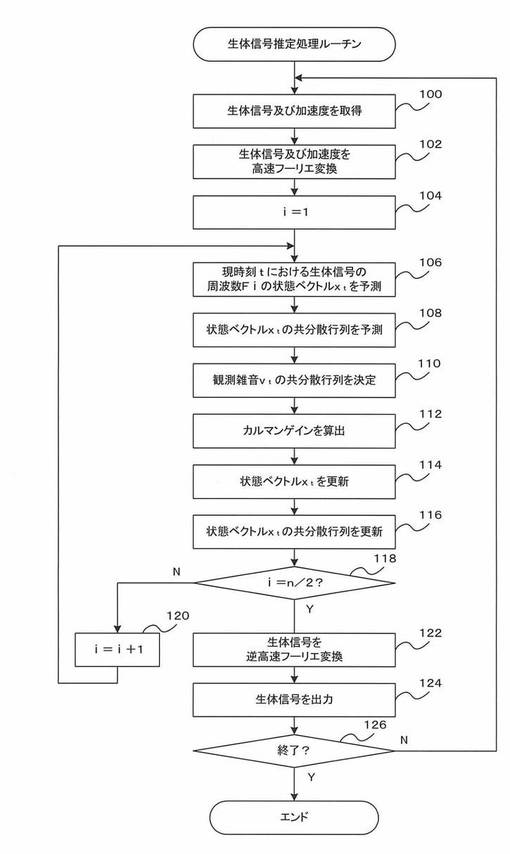
まず、生体信号検出部12により、運転者20の表面の振動を連続して検出して、検出した振動に応じた生体信号を連続して出力する。また、加速度検出部14によって、車両の3軸加速度を連続して検出して、検出した3軸加速度に応じた加速度信号を連続して出力する。このとき、生体信号推定装置10のコンピュータ16によって、図5に示す生体信号推定処理ルーチンを実行する。
【0055】
ステップ100で、生体信号検出部12による直近の所定期間分の生体信号を取得すると共に、加速度検出部14による直近の所定期間分の加速度信号を取得する。ステップ102において、上記ステップ100で取得した生体信号に対して、高速フーリエ変換を行って、生体信号に対するn/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを生成する。また、上記ステップ100で取得した加速度信号に対して、X軸方向、Y軸方向、及びZ軸方向の3軸の加速度各々について、高速フーリエ変換を行って、m点の周波数FGXj(j=1、2、…、m)でのパワースペクトル密度PSDGXj、周波数FGYjでのパワースペクトル密度PSDGYj、周波数FGZjでのパワースペクトル密度PSDGZjを算出する。
【0056】
次のステップ104では、生体信号の周波数配列の周波数を識別するための変数iを初期値1に設定する。また、カルマンフィルタの計算で用いる各種パラメータの初期値を設定する。
【0057】
そして、ステップ106において、上記(4)式に従って、現時刻tにおける生体信号の周波数Fiの状態ベクトル^xt|t-1を予測する。次のステップ108では、上記(5)式に従って、状態ベクトル^xt|t-1の共分散Σt|t−1を予測する。
【0058】
そして、ステップ110において、上記ステップ102で得られた加速度信号の各周波数FGXjでのパワースペクトル密度PSDGXj、各周波数FGYjでのパワースペクトル密度PSDGYj、各周波数FGZjでのパワースペクトル密度PSDGZjと、予め求められた上記図4に示すX軸方向の対照表、Y軸方向の対照表、Z軸方向の対照表と基づいて、X軸方向の加速度に伴うΣvtGX、Y軸方向の加速度に伴うΣvtGY、Z軸方向の加速度に伴うΣvtGZを求め、周波数Fiに対する観測雑音vtの共分散行列Σvtを決定する。
【0059】
次のステップ112では、上記ステップ108で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記ステップ110で決定された周波数Fiに対する観測雑音vtの共分散行列Σvtとに基づいて、上記(6)式に従って、周波数Fiに対するカルマンゲインKtを算出する。
【0060】
そして、ステップ114において、上記ステップ102で求められた現時刻tにおける周波数Fiの振幅配列Ati、位相配列Pitと、上記ステップ112で算出されたカルマンゲインKtとに基づいて、上記(7)式に従って、現時刻tにおける周波数Fiに対する状態ベクトル^xt|tを更新する。また、ステップ116において、上記ステップ108で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記ステップ112で算出されたカルマンゲインKtとに基づいて、上記(8)式に従って、状態ベクトル^xt|tの共分散Σt|tを更新する。
【0061】
そして、ステップ118において、変数iが、n/2になったか否かを判定する。変数iがn/2に到達していない場合には、ステップ120において、変数iを1インクリメントして、上記ステップ106へ戻る。一方、変数iがn/2に到達した場合には、全ての周波数Fiについて、状態ベクトル^xt|tを推定したと判断して、ステップ122へ移行する。
【0062】
ステップ122では、上記ステップ114で求められた各周波数Fiに対する状態ベクトル^xt|tから得られる、生体信号の各周波数Fiの振幅の推定値及び位相の推定値に対して、逆高速フーリエ変換を行うことにより、現時刻tにおける生体信号を算出する。
【0063】
そして、ステップ124において、上記ステップ122で算出された現時刻tにおける生体信号を出力する。ステップ126では、上記の処理を終了するか否かを判定し、終了しない場合には、上記ステップ100へ戻り、次時刻について同様の処理を行う。一方、上記の処理を終了すると判定された場合には、生体信号推定処理ルーチンを終了する。
【0064】
上記のように生体信号推定処理ルーチンが実行されると、生体信号検出部12により出力される生体信号の時系列と、加速度検出部14により出力される加速度信号の時系列とに基づいて、推定された生体信号の時系列が生体信号推定装置10から出力される。
【0065】
以上説明したように、第1の実施の形態の生体信号推定装置によれば、検出された加速度信号の各周波数成分に基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、観測雑音がないと仮定した時の運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0066】
本実施の形態では、カルマンフィルタによる生体信号の状態推定を行う。一般にカルマンフィルタは、誤差のある観測値を用いて、動的システムの状態を推定あるいは制御するためのフィルタであり、観測値の誤差に応じて観測値と推定値との寄与を調整することができる。このカルマンフィルタのゲインを、車両挙動又は運転操作に応じて切り替えることにより、観測値と推定値とを最適な寄与で使い分けることが可能になり、雑音の多い状況下でも、精度よく生体信号を推定することが可能になる。
【0067】
また、車両の運転者の生体信号を無拘束かつ非接触で計測する場合、車両挙動に起因する受動的な体動による雑音、運転操作等に起因する能動的な体動による雑音が混入するため、精度の高い計測を行うことは困難である。本実施の形態では、体動による雑音が多い状況下でも、生体信号を精度よく推定できる。
【0068】
なお、上記の実施の形態では、X、Y、Zの3軸の加速度を基にΣvtを決定したが、生体信号検出部の出力に与えない座標軸がある場合には、該当する座標軸の加速度は考慮しなくてもよい。また、車両の回転角速度も生体信号検出部の出力に影響する場合は、車両の回転角速度を更に考慮してΣvtを決定してもよい。この場合には、加速度検出部で計測できる座標軸を増やすようにすればよい。
【0069】
次に、第2の実施の形態について説明する。なお、第2の実施の形態に係る生体信号推定装置は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0070】
第2の実施の形態では、各大きさの加速度が加わった場合の、周波数Fiの生体信号の影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列ΣvGXi,jを格納した対照表を用いている点が、第1の実施の形態と異なっている。
【0071】
車両からの加速度入力には、路面の段差などによるインパルス入力も多い。そこで、第2の実施の形態の生体信号推定装置は、以下に説明するように、観測雑音vtの共分散行列Σvtを、加速度検出部14より出力された加速度信号の座標軸ごとの絶対値に応じて決定する。
【0072】
まず、X軸方向の加速度について、図6に示すような、絶対値が各範囲Gi≦Gx<Gjとなる加速度Gxが加わった場合の、周波数Fiの生体信号への影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列ΣvGXi,jを格納した対照表を予め用意しておく。対照表では、各周波数Fiにおいて、加速度Gxの絶対値が大きいほど、対応する観測雑音vtの共分散行列ΣvGXi,jが大きくなるように値が格納されている。各周波数Fiについて、加速度の絶対値GXと対象の周波数Fiとの組み合わせに対する、観測雑音vtの共分散行列ΣvGXi,jにより、X軸方向の加速度に伴うΣvXを求める。また、同様にして、Y軸方向についての対照表を用いて、Y軸方向の加速度に伴うΣvYを求め、Z軸方向についての対照表を用いて、Z軸方向の加速度に伴うΣvZを求める。以上より、求められたΣvX、ΣvY及びΣvZの和をΣvtとして決定する。このように、各周波数Fiについて、観測雑音vtの共分散行列Σvtが決定される。
【0073】
上記図6に示した対照表は、例えば、本実施の形態に係る生体信号推定装置を備えた車両、または本発明に関連する部分に対して、複数の大きさの加速度を入力し、その時の運転者の振動特性を計測することで得ることができる。
【0074】
次に、第2の実施の形態に係る生体信号推定処理ルーチンについて説明する。
【0075】
まず、生体信号検出部12による直近の所定期間分の生体信号を取得すると共に、加速度検出部14による現時刻の加速度信号を取得する。そして、上記で取得した生体信号に対して、高速フーリエ変換を行って、生体信号に対するn/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを生成する。
【0076】
次に、生体信号の周波数配列の周波数を識別するための変数iを初期値1に設定する。また、カルマンフィルタの計算で用いる各種パラメータの初期値を設定する。
【0077】
そして、上記(4)式に従って、現時刻tにおける生体信号の周波数Fiの状態ベクトル^xt|t-1を予測する。次に、上記(5)式に従って、状態ベクトル^xt|t-1の共分散Σt|t−1を予測する。
【0078】
そして、上記で得られた加速度信号の各座標軸における絶対値GX、GY、GZと、予め求められた上記図6に示すX軸方向の対照表、Y軸方向の対照表、Z軸方向の対照表と基づいて、X軸の加速度に伴うΣvX、Y軸方向についてΣvY、Z軸方向についてΣvZを求め、周波数Fiに対する観測雑音vtの共分散行列Σvtを決定する。
【0079】
次に、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で決定された周波数Fiに対する観測雑音vtの共分散行列Σvtとに基づいて、上記(6)式に従って、周波数Fiに対するカルマンゲインKtを算出する。
【0080】
そして、上記で求められた現時刻tにおける周波数Fiの振幅配列Ati、位相配列Ptiと、上記で算出されたカルマンゲインKtとに基づいて、上記(7)式に従って、現時刻tにおける周波数Fiに対する状態ベクトル^xt|tを更新する。また、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で算出されたカルマンゲインKtとに基づいて、上記(8)式に従って、状態ベクトル^xt|tの共分散Σt|tを更新する。
【0081】
上記の各処理を、変数iが、n/2になるまで繰り返し行い、全ての周波数Fiについて、状態ベクトル^xt|tを推定する。
【0082】
そして、上記で求められた各周波数Fiに対する状態ベクトル^xt|tから得られる、生体信号の各周波数Fiの振幅の推定値及び位相の推定値に対して、逆高速フーリエ変換を行うことにより、現時刻tにおける生体信号を算出する。
【0083】
そして、上記で算出された現時刻tにおける生体信号が示す生体信号を出力する。上記の処理を終了するか否かを判定し、終了しない場合には、最初の処理へ戻り、次時刻について同様の処理を行う。
【0084】
なお、第2の実施の形態に係る生体信号推定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0085】
このように、検出された加速度の絶対値に基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、観測雑音がないと仮定した時の運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0086】
加速度振幅と観測雑音の周波数帯域との間には直接の因果関係は存在しない。しかし、人体に加速度を入力した場合には、加速度の振幅がある程度までの範囲である場合は、こらえなどにより人体の振動は低減される。また、加速度の振幅がある程度以上の場合は、共振周波数を中心に人体が振動する。また、さらに大きい加速度が入力されると、人体が共振周波数以外の周波数帯域の振動も無視できなくなってくると考えられる。このことから、加速度振幅により、観測雑音の各周波数成分への影響は変化すると考えられる。そこで、本実施の形態では、加速度の振幅(絶対値)と観測雑音の各周波数成分との間の影響度合いに応じて、周波数毎に観測雑音の共分散行列を決定し、カルマンゲインを設定することにより、観測雑音の影響を受けやすい周波数では推定値を多く使い、影響を受けにくい周波数では観測値を多く使うことにより、雑音の少ない周波数の生体信号を残したまま、雑音を低減することができる。
【0087】
なお、上記の実施の形態では、X、Y、Zの3軸の加速度を基にΣvtを決定したが、生体信号検出部の出力に与えない座標軸がある場合には、該当する座標軸の加速度は考慮しなくてもよい。また、車両の回転角速度も生体信号検出部の出力に影響する場合は、車両の回転角速度を更に考慮してΣvtを決定してもよい。
【0088】
次に、第3の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については、同一符号を付して説明を省略する。
【0089】
第3の実施の形態では、ステアリング角速度を検出して、観測雑音の共分散行列を決定している点が、第1の実施の形態と異なっている。
【0090】
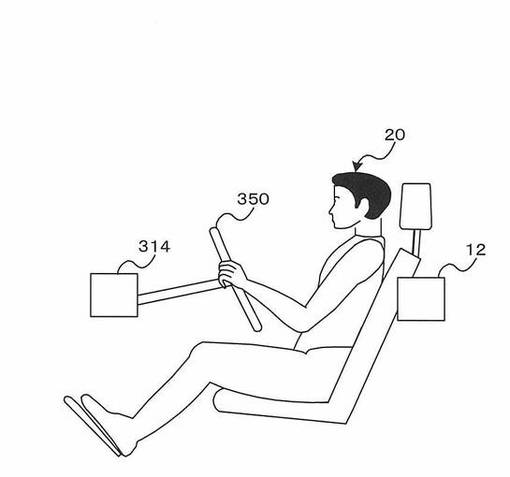
図7に示すように、第3の実施の形態に係る生体信号推定装置310は、生体信号検出部12、ステアリング角速度検出部314と、コンピュータ316と、出力部18とを備えている。
【0091】
ステアリング角速度検出部314は、図8に示すように、運転者によって操作されるステアリング350のステアリング角度を検出すると共に、検出されたステアリング角度からステアリング角速度を算出して、算出されたステアリング角速度に応じたステアリング角速度信号を出力する。
【0092】
コンピュータ316は、高速フーリエ変換演算部22と、カルマンフィルタ演算部324と、カルマンゲイン演算部325と、逆フーリエ変換演算部26とを備えている。
【0093】
高速フーリエ変換演算部22は、生体信号検出部12から出力された生体信号に対して、高速フーリエ変換を行う。
【0094】
カルマンフィルタ演算部324は、上記の第1の実施の形態と同様に、上記(A)、(B)、(E)、(F)の手順により、カルマンフィルタを用いて、生体信号の各周波数成分(振幅、位相)を推定する。
【0095】
上記の(C)の手順では、カルマンゲイン演算部325は、ステアリング角速度信号に応じて、観測雑音vtの共分散行列Σvtを決定する。
【0096】
ここで、上記(C)手順において、観測雑音の共分散行列を決定する原理について説明する。
【0097】
ハンドル操作やペダル操作は、その速さや大きさによって、人体の振動に与える影響が異なる。例えば、体動の大きな運転操作であっても、速い動きであれば、観測雑音には低い周波数の振動はあまり含まれず、例えば呼吸などの低い周波数の生体信号は検出しやすい可能性がある。しかし、従来のように観測雑音を白色雑音と仮定する方法では、低い周波数の観測値も推定値に置き換えてしまうため、計測できている信号を活かしきれない.本実施の形態では、操作の速さ(ステアリング角速度)に基づき、観測雑音の共分散行列を設定することにより、従来技術では活かしきれなかった信号を活かすことができる。
【0098】
以上の理由により、ステアリング角速度により、観測雑音が多く含まれている周波数帯域を推定し、その帯域の信号はカルマンフィルタによる推定値を多く用い、それ以外の帯域では観測値を多く用いることにより、できる限りもとの生体信号を残したまま、雑音をカットすることが可能になり、生体信号の検出精度を上げることができる。
【0099】
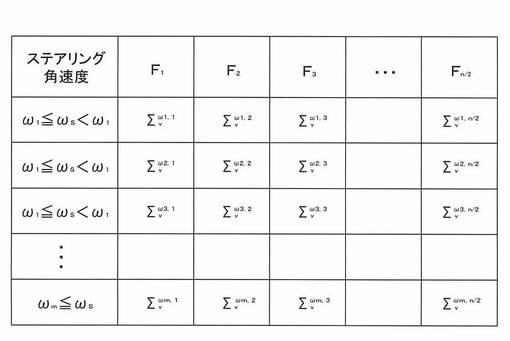
そこで、本実施の形態では、以下のように、各周波数Fiに対して、観測雑音vtの共分散行列Σvtを、ステアリング角速度検出部314より出力されたステアリング角速度信号に応じて決定する。まず、図9に示すような、各範囲ωi≦ωs<ωjとなるステアリング角速度ωsが加わった場合の、周波数Fiの生体信号への影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列Σvωi,jを格納した対照表を予め用意しておく。対照表では、各周波数Fiにおいて、ステアリング角速度が大きいほど、対応する観測雑音vtの共分散行列Σvωi,jが大きくなるように値が格納されている。各周波数Fiについて、ステアリング角速度の大きさと対象の周波数Fiとの組み合わせに対する、観測雑音vtの共分散行列Σvωi,jをΣvtとして決定する。このように、各周波数Fiについて、観測雑音vtの共分散行列Σvtが決定される。
【0100】
次に、第3の実施の形態に係る生体信号推定処理ルーチンが実行される。まず、生体信号検出部12による直近の所定期間分の生体信号を取得すると共に、ステアリング角速度検出部314による現時刻のステアリング角速度信号を取得する。そして、上記で取得した生体信号に対して、高速フーリエ変換を行って、生体信号に対するn/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを生成する。
【0101】
次に、生体信号の周波数配列の周波数を識別するための変数iを初期値1に設定する。また、カルマンフィルタの計算で用いる各種パラメータの初期値を設定する。
【0102】
そして、上記(4)式に従って、現時刻tにおける生体信号の周波数Fiの状態ベクトル^xt|t-1を予測する。次に、上記(5)式に従って、状態ベクトル^xt|t-1の共分散Σt|t−1を予測する。
【0103】
そして、上記で得られたステアリング角速度信号が示す角速度ωsと、予め求められた上記図9に示す対照表と基づいて、角速度ωsが含まれる角速度の範囲ωi≦ωs<ωjに対するΣvωi,jを求め、周波数Fiに対する観測雑音vtの共分散行列Σvtを決定する。
【0104】
次に、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で決定された周波数Fiに対する観測雑音vtの共分散行列Σvtとに基づいて、上記(6)式に従って、周波数Fiに対するカルマンゲインKtを算出する。
【0105】
そして、上記で求められた現時刻tにおける周波数Fiの振幅配列Ati、位相配列Ptiと、上記で算出されたカルマンゲインKtとに基づいて、上記(7)式に従って、現時刻tにおける周波数Fiに対する状態ベクトル^xt|tを更新する。また、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で算出されたカルマンゲインKtとに基づいて、上記(8)式に従って、状態ベクトル^xt|tの共分散Σt|tを更新する。
【0106】
上記の各処理を、変数iが、n/2になるまで繰り返し行い、全ての周波数Fiについて、状態ベクトル^xt|tを推定する。
【0107】
そして、上記で求められた各周波数Fiに対する状態ベクトル^xt|tから得られる、生体信号の各周波数Fiの振幅の推定値及び位相の推定値に対して、逆高速フーリエ変換を行うことにより、観測雑音がないと仮定した時の現時刻tにおける生体信号を算出する。
【0108】
そして、上記で算出された現時刻tにおける生体信号を出力する。上記の処理を終了するか否かを判定し、終了しない場合には、最初の処理へ戻り、次時刻について同様の処理を行う。
【0109】
なお、第3の実施の形態に係る生体信号推定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0110】
このように、検出されたステアリング角速度の大きさに基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、運転者の生体信号を推定することにより、車両の運転者の生体信号を精度良く推定することができる。
【0111】
ステアリング角度ではなくステアリング角速度を用いて、観測雑音の共分散行列を決定するようにした理由は、ステアリングを一定角度で保持している場合は、ステアリング角度が大きくても体動は少なく、生体信号に混入する雑音も小さいと考えられるためである。
【0112】
なお、上述した第1の実施の形態と同様に、ステアリング角速度に対して高速フーリエ変換を行い、ステアリング角速度の各周波数成分と、生体信号の各周波数成分との間の影響度合いに基づいて、各周波数毎に、観測雑音の共分散を決定するようにしてもよい。
【0113】
次に、第4の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については、同一符号を付して説明を省略する。
【0114】
第4の実施の形態では、ペダル角速度を検出して、観測雑音の共分散行列を決定している点が、第3の実施の形態と異なっている。
【0115】
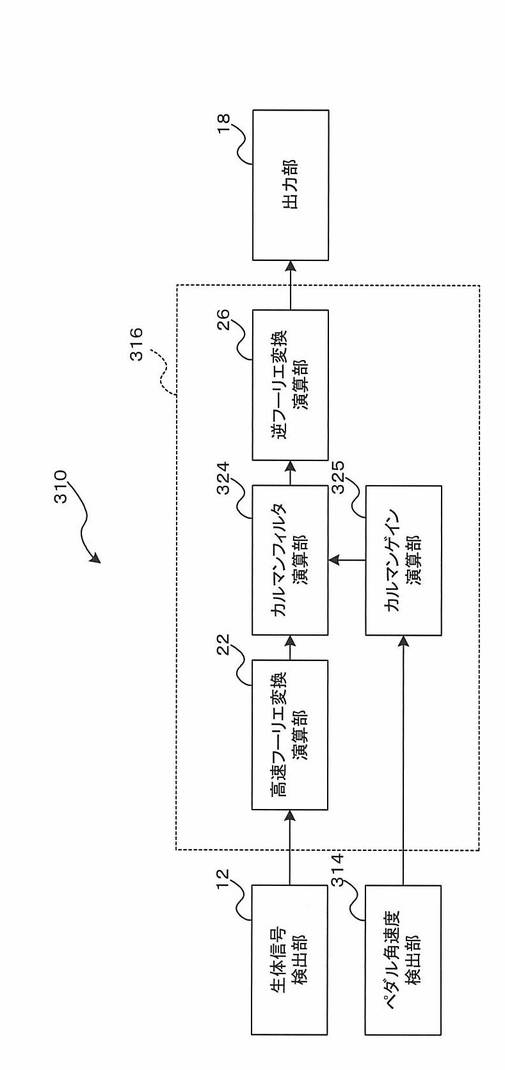
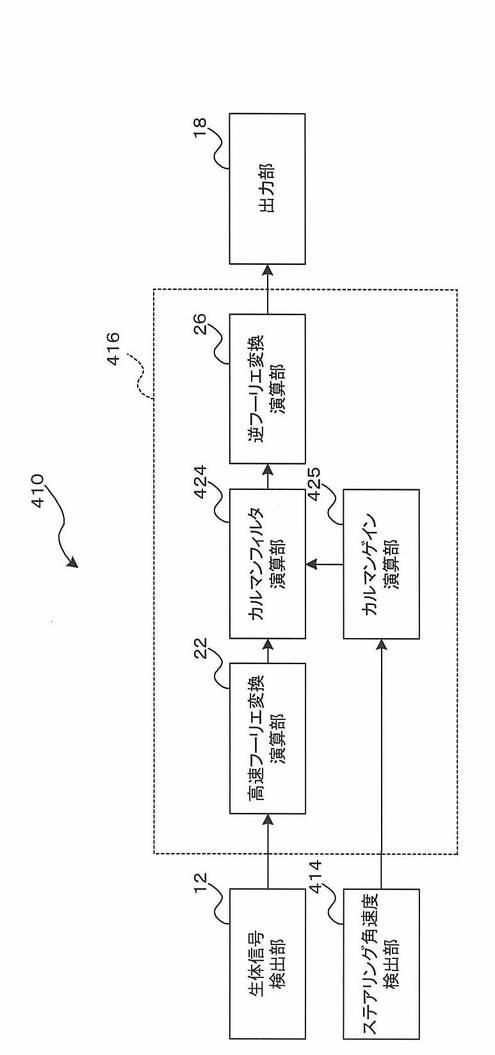
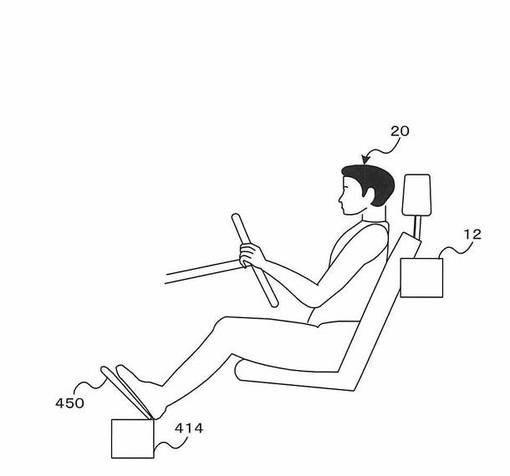
図10に示すように、第4の実施の形態に係る生体信号推定装置410は、生体信号検出部12、ペダル角速度検出部414と、コンピュータ416と、出力部18とを備えている。
【0116】
ペダル角速度検出部414は、図11に示すように、運転者によって操作されるアクセルペダル450のペダル角度を検出すると共に、検出されたペダル角度からペダル角速度を算出して、算出されたペダル角速度に応じたペダル角速度信号を出力する。
【0117】
コンピュータ416は、高速フーリエ変換演算部22と、カルマンフィルタ演算部424と、カルマンゲイン演算部425と、逆フーリエ変換演算部26とを備えている。
【0118】
高速フーリエ変換演算部22は、生体信号検出部12から出力された生体信号に対して、高速フーリエ変換を行う。
【0119】
カルマンフィルタ演算部424は、上記の第1の実施の形態と同様に、上記(A)、(B)、(E)、(F)の手順により、カルマンフィルタを用いて、生体信号の各周波数成分(振幅、位相)を推定する。
【0120】
上記の(C)の手順では、カルマンゲイン演算部425は、ペダル角速度信号に応じて、観測雑音vtの共分散行列Σvtを決定する。ここで、上記(C)手順において、観測雑音の共分散行列を決定する原理について説明する。
【0121】
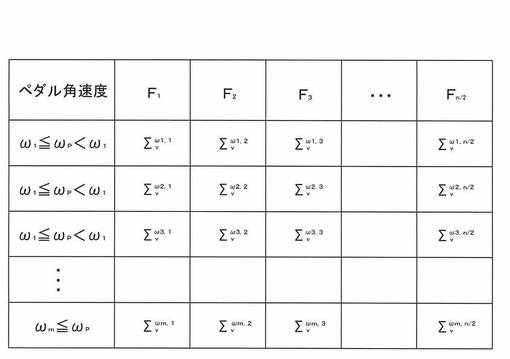
本実施の形態では、以下のように、各周波数Fiに対して、観測雑音vtの共分散行列Σvtを、ペダル角速度検出部414より出力されたペダル角速度信号に応じて決定する。まず、図12に示すような、各範囲ωi≦ωp<ωjとなるペダル角速度ωpが加わった場合の、周波数Fiの生体信号への影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列Σvωi,jを格納した対照表を予め用意しておく。対照表では、各周波数Fiにおいて、ペダル角速度が大きいほど、対応する観測雑音vtの共分散行列Σvωi,jが大きくなるように値が格納されている。各周波数Fiについて、ペダル角速度の大きさと対象の周波数Fiとの組み合わせに対する、観測雑音vtの共分散行列Σvωi,jをΣvtとして決定する。このように、各周波数Fiについて、観測雑音vtの共分散行列Σvtが決定される。
【0122】
なお、第4の実施の形態に係る生体信号推定装置の他の構成及び作用については、第3の実施の形態と同様であるため、説明を省略する。
【0123】
このように、検出されたペダル角速度の大きさに基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0124】
ペダル角度ではなくペダル角速度を用いて、観測雑音の共分散を決定するようにした理由は、ペダルを一定角度で保持している場合は、ペダルを大きく踏み込んでいても体動は少なく、生体信号に混入する雑音も小さいと考えられるためである。
【0125】
なお、上記の実施の形態では、アクセルペダルのペダル角速度を検出する場合を例に説明したが、これに限定されるものではなく、ブレーキペダルのペダル角速度を検出するようにしてもよい。
【0126】
また、上述した第1の実施の形態と同様に、ペダル角速度に対して高速フーリエ変換を行い、ペダル角速度の各周波数成分と、生体信号の各周波数成分との間の影響度合いに基づいて、各周波数毎に、観測雑音の共分散を決定するようにしてもよい。
【0127】
また、上述した第1の実施の形態又は第2の実施の形態と同様に加速度信号を用いて決定した観測雑音の共分散と、上述した第3の実施の形態と同様にステアリング角速度信号を用いて決定した観測雑音の共分散と、上述した第4の実施の形態と同様にペダル角速度信号を用いて決定した観測雑音の共分散とを組み合わせて、最終的な観測雑音の共分散を決定するようにしてもよい。
【符号の説明】
【0128】
10、310、410 生体信号推定装置
12 生体信号検出部
14 加速度検出部
16、316、416 コンピュータ
22、23 高速フーリエ変換演算部
24、324、424 カルマンフィルタ演算部
25、325、425 カルマンゲイン演算部
26 逆フーリエ変換演算部
314 ステアリング角速度検出部
414 ペダル角速度検出部
【技術分野】
【0001】
本発明は、生体信号推定装置及びプログラムに係り、特に、生体センサからの出力信号に基づいて、運転者の生体信号を推定する生体信号推定装置及びプログラムに関する。
【背景技術】
【0002】
従来より、車両の運転者の状況推定のため、運転者の生体信号を計測する技術が多く開発されている(例えば、特許文献1〜特許文献5)。
【0003】
特許文献1では、ステアリングに設置した電極により、運転操作を行う運転者の両手の電位を計測する技術が開示されている。また、特許文献2では静電容量型の心電計による運転者の心拍を計測する技術が開示されている。さらに、特許文献3では電波式ドップラ法を用いて運転者の心拍に伴う人体表面の振動を計測する方法が開示されている。特許文献4では電波式ドップラ法を用いて心拍及び呼吸を計測する方法が開示されている。
【0004】
しかし、走行中の車内において運転者の生体信号を計測する際は、車両を介して運転者及び計測装置に加わる環境雑音、運転者の能動的な体動(運転操作等)に伴う雑音など、種々の雑音が混入されるため、雑音に対してロバストな信号処理技術が必要とされる。特許文献5では、車両の加速度に応じてマップから生体信号の補正量を抽出し、加速度の影響を補正する手法を提案している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−102188号公報
【特許文献2】特開2007−82938号公報
【特許文献3】特開2006−55504号公報
【特許文献4】特表2006−510880号公報
【特許文献5】特開2009−213636号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の特許文献5では、車両加速度により生体信号に混入する雑音を抑制するため、加速度に応じたマップを適用する手法が開示されている。上記の特許文献5に記載の手法では、車両を介して運転者及び計測装置に加わる環境雑音を低減させることは出来るが、運転者の能動的な体動(運転操作等)に伴う雑音を低減させることはできない。また、車両の加速度によって生体信号に加わる雑音は、運転者の姿勢等によって異なるため、事前に用意したマップだけでは対応できない場合も多い。
【0007】
本発明は、上述した事情を考慮して成されたものであり、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる生体信号推定装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明の生体信号推定装置は、車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサと、前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段と、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段と、前記生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段と、を含んで構成されている。
【0009】
本発明のプログラムは、コンピュータを、前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段、及び車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段として機能させるためのプログラムである。
【0010】
本発明によれば、生体センサによって、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する。計測手段によって、前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する。
【0011】
そして、カルマンゲイン算出手段によって、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出する。生体信号推定手段によって、前記生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する。
【0012】
このように、計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、観測雑音の共分散を決定して、カルマンゲインを算出し、カルマンフィルタに従って、運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0013】
本発明に係るカルマンゲイン算出手段は、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方が大きいほど、前記観測雑音の共分散が大きくなるように決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するようにすることができる。
【0014】
本発明に係る生体信号推定装置は、前記生体センサによって出力された出力信号、及び前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の各々に対して、周波数分析を行う周波数分析手段を更に含み、前記カルマンゲイン算出手段は、周波数の各組み合わせについて、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の予め求められた影響度合いと、前記周波数分析手段による前記操作量及び前記運動状態量の少なくとも一方の周波数分析の結果とに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定するようにすることができる。また、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の影響度合いを、周波数が近いほど大きくなるように予め求めることができる。
【0015】
本発明に係る生体信号推定装置は、前記生体センサによって出力された出力信号に対して、周波数分析を行う周波数分析手段を更に含み、前記カルマンゲイン算出手段は、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の大きさの各範囲との間の予め求められた影響度合いと、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の大きさとに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定するようにすることができる。
【0016】
本発明に係る計測手段は、前記運動状態量として、前記車両の加速度を計測するようにすることができる。
【0017】
本発明に係る計測手段は、前記操作量として、ステアリング角速度及びペダル角速度の少なくとも一方を計測するようにすることができる。
【0018】
本発明に係る生体信号推定手段は、時刻t−1までの出力信号の時系列に基づいて、現時刻tにおける状態ベクトルxt|t-1を予測し、現時刻tにおける観測値としての出力信号ytと、前記予測された状態ベクトルxt|t-1と、現時刻tについて算出されたカルマンゲインKtとに基づいて、現時刻tにおける状態ベクトルxt|tを更新し、現時刻tにおける状態ベクトルxt|tに基づいて、現時刻tにおける観測状態を含まない生体信号を推定するようにすることができる。
【0019】
なお、上記の発明のプログラムを記憶する記憶媒体は、特に限定されず、ハードディスクであってもよいし、ROMであってもよい。また、CD−ROMやDVDディスク、光磁気ディスクやICカードであってもよい。更にまた、該プログラムを、ネットワークに接続されたサーバ等からダウンロードするようにしてもよい。
【発明の効果】
【0020】
以上説明したように、本発明に係る生体信号推定装置及びプログラムによれば、計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、観測雑音の共分散を決定して、カルマンゲインを算出し、カルマンフィルタに従って、運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる、という効果が得られる。
【図面の簡単な説明】
【0021】
【図1】第1の実施の形態に係る生体信号推定装置の構成を示すブロック図である。
【図2】生体信号検出部を配置した様子を示す図である。
【図3】(A)観測雑音を白色雑音と仮定した場合を示す図、及び(B)車両加速度の影響を受けやすい周波数帯域を考慮した場合を示す図である。
【図4】対照表を示す図である。
【図5】第1の実施の形態の生体信号推定装置における生体信号推定処理ルーチンの内容を示すフローチャートである。
【図6】対照表を示す図である。
【図7】第3の実施の形態に係る生体信号推定装置の構成を示すブロック図である。
【図8】生体信号検出部及びステアリング角速度検出部を配置した様子を示す図である。
【図9】対照表を示す図である。
【図10】第4の実施の形態に係る生体信号推定装置の構成を示すブロック図である。
【図11】生体信号検出部及びペダル角速度検出部を配置した様子を示す図である。
【図12】対照表を示す図である。
【発明を実施するための形態】
【0022】
以下、図面を参照して本発明の実施の形態を詳細に説明する。まず、第1の実施の形態では、運転者の生体信号を推定する生体信号推定装置に本発明を適用した場合について説明する。
【0023】
図1に示すように、第1の実施の形態に係る生体信号推定装置10は、生体信号検出部12と、加速度検出部14と、コンピュータ16と、出力部18とを備えている。図2に示すように、生体信号検出部12は、車両側(例えば、シート)に取り付けられ、運転者20の表面振動を検出し、検出された表面振動に応じた生体信号を出力する。生体信号検出部12は、サンプリング周期Δt[秒]で、運転者20のセンサ側の表面振動を検出し、生体信号を出力する。生体信号検出部12としては、例えば、レーダドップラセンサや定在波レーダ等の電波式センサ、圧電素子やPVDF圧力センサ等の圧力センサ、加速度センサ等を用いることができる。
【0024】
加速度検出部14は、車両を構成する部材に固定されており、車両の3軸加速度を検出し、検出した加速度に応じた加速度信号を出力する。なお、加速度検出部14は、計測手段の一例である。
【0025】
コンピュータ16は、生体信号検出部12から出力された生体信号及び加速度検出部14によって出力された加速度信号に基づいて、運転者20の表面振動から生体信号を推定し、出力部18により推定結果を出力する。なお、推定される生体信号は、例えば、心拍、心音、脈波、呼吸、呼吸音等である。
【0026】
コンピュータ16は、生体信号推定装置10全体の制御を司るCPU、後述する生体信号推定処理ルーチンのプログラム等を記憶した記憶媒体としてのROM、ワークエリアとしてデータを一時格納するRAM、及びこれらを接続するバスを含んで構成されている。このような構成の場合には、各構成要素の機能を実現するためのプログラムをROMやHDD等の記憶媒体に記憶しておき、これをCPUが実行することによって、各機能が実現されるようにする。
【0027】
このコンピュータ16をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、図1に示すように、生体信号検出部12から出力された生体信号に対して、高速フーリエ変換を行う高速フーリエ変換演算部22と、加速度検出部14によって出力された加速度信号に対して、高速フーリエ変換を行う高速フーリエ変換演算部23と、カルマンフィルタを用いて、生体信号の各周波数成分を推定するカルマンフィルタ演算部24と、加速度信号の各周波数成分に応じてカルマンゲインを演算するカルマンゲイン演算部25と、生体信号の各周波数成分に対して逆高速フーリエ変換を行って、生体信号を演算する逆フーリエ変換演算部26と、を備えている。高速フーリエ変換演算部22が、周波数分析手段の一例であり、カルマンゲイン演算部25は、カルマンゲイン算出手段の一例であり、カルマンフィルタ演算部24及び逆フーリエ変換演算部26は、生体信号推定手段の一例である。
【0028】
高速フーリエ変換演算部22は、入力された生体信号の時系列から、現時刻tにおける直近n点の生体信号を抽出し、高速フーリエ変換を行う。
【0029】
サンプリングレートΔtでサンプリングされた時刻tから前方n点の生体信号Stを以下の式のように定義する。ただし、nは偶数とし、Δt=1とする。
【0030】
【数1】
Stを高速フーリエ変換すると、n点の離散フーリエ変換(DFT)が得られるが、冗長な部分が含まれているので、冗長な部分を除いたn/2点のDFTを振幅と位相に分け、振幅をSAti、位相をSPtiとし、その時の周波数をFi[Hz]とする。ただしi=1、2、…、n/2である。
【0031】
高速フーリエ変換演算部22は、n/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを出力する。
【0032】
また、高速フーリエ変換演算部23は、X軸方向、Y軸方向、及びZ軸方向の3軸の加速度各々について、入力された加速度信号の時系列より、現時刻tにおける直近の加速度信号を抽出し、高速フーリエ変換を行い、m点の周波数FGXj(j=1、2、…、m)でのパワースペクトル密度PSDGXjを算出する。また、Y軸方向、Z軸方向についてもそれぞれ同様に、m点の周波数FGYj、FGZjでのパワースペクトル密度PSDGYj、PSDGZjを算出する。
【0033】
カルマンフィルタ演算部24は、周波数Fiごとにカルマンフィルタを用いた状態推定を行う。本実施の形態で用いるカルマンフィルタは、以下の(1)式〜(3)式で表される確率線形システムに基づいている。ただし、生体信号Stに含まれる任意の周波数Fi[Hz]の観測雑音がないと仮定した時の生体信号の振幅をAtiとし、位相をPtiとする。
【0034】
【数2】
また、Ftは状態遷移行列、Gtは駆動行列である。wtはシステム雑音ベクトル、ytは観測値、Htは観測行列、vtは観測雑音ベクトルである。生体信号検出部12で検出する誤差が含まれる生体信号の時刻tにおける前方n点の高速フーリエ変換を観測値ytとする。
【0035】
また、システム雑音ベクトルwtは生体信号に依存する雑音であり、駆動行列Gtもシステム雑音に依存して決まると考えられる。一方、観測雑音ベクトルvtは、生体に外力が加わる事による振動や生体の動作に伴う体動による雑音が含まれる。
【0036】
カルマンフィルタ演算部24は、以下の(A)、(B)、(E)、(F)の手順で状態推定を行う。
(A)時刻t−1において更新された状態ベクトル^xt−1|t−1より、以下の(4)式に従って、現時刻tにおける状態ベクトル^xt|t-1を予測する。
【0037】
【数3】
ここで、^xt|t-1は、時刻t−1までの観測値yt-1がわかっている時のxtの推定値であり、^xt−1|t−1は、時刻t−1までの観測値yt-1がわかっている時のxt-1の推定値である。
(B)以下の(5)式に従って、^xt|t−1の誤差の共分散行列Σt|t−1を予測する。
【0038】
【数4】
ただし、Σwt−1は、システム雑音雑音ベクトルwt-1の共分散行列である。
(C)カルマンゲイン演算部25は、観測雑音ベクトルvtの共分散行列Σvtを決定する。観測雑音vtの共分散行列Σvtは、後述するように、加速度検出部14より出力された加速度信号に応じて決定される。
(D)カルマンゲイン演算部25は、以下の(6)式に従って、カルマンゲインKtを算出する。
【0039】
【数5】
(E)現時刻tにおいて実際に観測された観測ベクトルyi=[SAti,SPit]Tを用い、以下の(7)式に従って、現時刻tにおける状態ベクトル^xt|tを更新する。
【0040】
【数6】
(F)以下の(8)式に従って、^xt|tの共分散Σt|tを更新する。
【0041】
【数7】
以上の手順により出力された^xt|tの第一要素は、観測雑音がないと仮定した時の周波数Fiにおける生体信号の振幅の推定値であり、第二要素は、周波数Fiにおける生体信号の位相の推定値である。上記の手順を、周波数Fiごとに行うことにより、生体信号の振幅配列、及び生体信号の位相配列を得ることができる。なお、生体信号の解析に必要な周波数帯域が限定されている場合は、解析が不要な周波数帯域の周波数Fiについてカルマンフィルタを用いた状態推定を行う必要はない。
【0042】
ここで、上記(C)手順において、観測雑音の共分散行列を決定する原理について説明する。
【0043】
カルマンフィルタを用いた信号処理を行う場合、観測雑音vtの共分散行列Σvtが不明なことがほとんどである。そのため、従来は観測雑音vtが適当なエネルギーを有する白色雑音であると仮定して共分散行列Σvtを求めて、求められた共分散行列Σvtよりカルマンゲインを決定することが多かった。
【0044】
ここで、あるシステムにおいて、観測雑音vtのパワースペクトル密度が図3(A)に示すように偏っていた場合を考えると、観測雑音vtが白色雑音であると仮定してカルマンゲインを設定した場合には、本来観測雑音vtの影響を受けない帯域の観測値まで推定値と置き換えて信号処理することとなり、観測値を活かしきれない、という問題点がある。
【0045】
人体に振動が加わった場合、振動の一部の周波数は人体によく伝播し、人体を大きく動揺させるが、他の周波数の振動は人体の振動に影響を与えにくいことが知られている(いわゆる共振周波数)。これは、車両加速度に対する人体の振動の影響についても同様である。そこで、車両加速度の周波数分布(各周波数成分)に応じて、各周波数毎に観測雑音の共分散行列を設定して、カルマンゲインを決定することにより、図3(B)に示すように、車両加速度の影響を受けやすい周波数帯域は推定値を使い、影響を受けにくい帯域は観測値を使うようにカルマンゲインを設定することが可能になる。これにより、「観測雑音の影響を受けにくい帯域も推定値を使うことにより観測値を活かしきれない」という従来技術の問題点を解決することができる。
【0046】
以上の理由により、車両加速度により、観測雑音が多く含まれている周波数帯域を推定し、その帯域の信号はカルマンフィルタによる推定値を多く用い、それ以外の帯域では観測値を多く用いることにより、雑音の少ない周波数帯域の生体信号を残したまま、雑音を低減することが可能になり、生体信号の推定精度を上げることができる。
【0047】
そこで、本実施の形態では、カルマンゲイン演算部25が、以下のように、各周波数Fiに対して、観測雑音vtの共分散行列Σvtを、加速度検出部14より出力された加速度信号の周波数分布に応じて決定する。まず、X軸方向の加速度について、図4に示すような、m点の周波数FGXj(j=1、2、…、m)において単位パワースペクトル密度の振動が加わった場合の、周波数Fiの生体信号の影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列ΣvGXi,jを格納した対照表を予め用意しておく。当該対照表では、生体信号の周波数Fiと、加速度信号の周波数FGXjが近いほど、影響度合いが大きいため、当該周波数の組み合わせに対応する観測雑音vtの共分散行列ΣvGXj,tの値として大きい値が格納されている。当該対照表を用いて、対象の周波数Fiと各周波数FGXjの組み合わせに対する、観測雑音vtの共分散行列ΣvGXi,jと、パワースペクトル密度PSDGXjにより、X軸の加速度に伴うΣvtGXを決定する。
【0048】
Σvt GXは、以下の式に示すように、ΣvGXi,jと、周波数FGXjのパワースペクトル密度PSDGXjの積をi=1,・・・,n/2,j=1,・・・,mで足し合わせることによって求められる。
【0049】
【数8】
これによって、周波数FGXj(j=1、2、…、m)において単位パワースペクトル密度が大きいほど、観測雑音vtの共分散行列ΣvtGXが大きくなるように決定される。
【0050】
また、同様にして、Y軸方向についてΣvtGY、Z軸方向についてΣvtGZを求める。以上より、求められたΣvtGX、ΣvtGY及びΣvtGZの和をΣvtとして決定する。
【0051】
上記図4に示した対照表は、例えば、本実施の形態に係る生体信号推定装置10を備えた車両、または本発明に関連する部分(生体信号検出部12や加速度検出部14、運転者が搭乗するシート等及びその接合構造が保持されていること)を複数の周波数で加振し、その時の運転者の振動特性を計測することで得ることができる。
【0052】
逆フーリエ変換演算部26は、カルマンフィルタ演算部24により推定された生体信号の周波数配列、生体信号の振幅配列、及び生体信号の位相配列に対し、逆高速フーリエ変換を行うことにより、雑音を除去した生体信号を演算し、出力部18により、演算された生体信号が示す生体信号を推定結果として外部に対して出力する。
【0053】
次に、第1の実施の形態の生体信号推定装置10の作用について説明する。
【0054】
まず、生体信号検出部12により、運転者20の表面の振動を連続して検出して、検出した振動に応じた生体信号を連続して出力する。また、加速度検出部14によって、車両の3軸加速度を連続して検出して、検出した3軸加速度に応じた加速度信号を連続して出力する。このとき、生体信号推定装置10のコンピュータ16によって、図5に示す生体信号推定処理ルーチンを実行する。
【0055】
ステップ100で、生体信号検出部12による直近の所定期間分の生体信号を取得すると共に、加速度検出部14による直近の所定期間分の加速度信号を取得する。ステップ102において、上記ステップ100で取得した生体信号に対して、高速フーリエ変換を行って、生体信号に対するn/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを生成する。また、上記ステップ100で取得した加速度信号に対して、X軸方向、Y軸方向、及びZ軸方向の3軸の加速度各々について、高速フーリエ変換を行って、m点の周波数FGXj(j=1、2、…、m)でのパワースペクトル密度PSDGXj、周波数FGYjでのパワースペクトル密度PSDGYj、周波数FGZjでのパワースペクトル密度PSDGZjを算出する。
【0056】
次のステップ104では、生体信号の周波数配列の周波数を識別するための変数iを初期値1に設定する。また、カルマンフィルタの計算で用いる各種パラメータの初期値を設定する。
【0057】
そして、ステップ106において、上記(4)式に従って、現時刻tにおける生体信号の周波数Fiの状態ベクトル^xt|t-1を予測する。次のステップ108では、上記(5)式に従って、状態ベクトル^xt|t-1の共分散Σt|t−1を予測する。
【0058】
そして、ステップ110において、上記ステップ102で得られた加速度信号の各周波数FGXjでのパワースペクトル密度PSDGXj、各周波数FGYjでのパワースペクトル密度PSDGYj、各周波数FGZjでのパワースペクトル密度PSDGZjと、予め求められた上記図4に示すX軸方向の対照表、Y軸方向の対照表、Z軸方向の対照表と基づいて、X軸方向の加速度に伴うΣvtGX、Y軸方向の加速度に伴うΣvtGY、Z軸方向の加速度に伴うΣvtGZを求め、周波数Fiに対する観測雑音vtの共分散行列Σvtを決定する。
【0059】
次のステップ112では、上記ステップ108で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記ステップ110で決定された周波数Fiに対する観測雑音vtの共分散行列Σvtとに基づいて、上記(6)式に従って、周波数Fiに対するカルマンゲインKtを算出する。
【0060】
そして、ステップ114において、上記ステップ102で求められた現時刻tにおける周波数Fiの振幅配列Ati、位相配列Pitと、上記ステップ112で算出されたカルマンゲインKtとに基づいて、上記(7)式に従って、現時刻tにおける周波数Fiに対する状態ベクトル^xt|tを更新する。また、ステップ116において、上記ステップ108で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記ステップ112で算出されたカルマンゲインKtとに基づいて、上記(8)式に従って、状態ベクトル^xt|tの共分散Σt|tを更新する。
【0061】
そして、ステップ118において、変数iが、n/2になったか否かを判定する。変数iがn/2に到達していない場合には、ステップ120において、変数iを1インクリメントして、上記ステップ106へ戻る。一方、変数iがn/2に到達した場合には、全ての周波数Fiについて、状態ベクトル^xt|tを推定したと判断して、ステップ122へ移行する。
【0062】
ステップ122では、上記ステップ114で求められた各周波数Fiに対する状態ベクトル^xt|tから得られる、生体信号の各周波数Fiの振幅の推定値及び位相の推定値に対して、逆高速フーリエ変換を行うことにより、現時刻tにおける生体信号を算出する。
【0063】
そして、ステップ124において、上記ステップ122で算出された現時刻tにおける生体信号を出力する。ステップ126では、上記の処理を終了するか否かを判定し、終了しない場合には、上記ステップ100へ戻り、次時刻について同様の処理を行う。一方、上記の処理を終了すると判定された場合には、生体信号推定処理ルーチンを終了する。
【0064】
上記のように生体信号推定処理ルーチンが実行されると、生体信号検出部12により出力される生体信号の時系列と、加速度検出部14により出力される加速度信号の時系列とに基づいて、推定された生体信号の時系列が生体信号推定装置10から出力される。
【0065】
以上説明したように、第1の実施の形態の生体信号推定装置によれば、検出された加速度信号の各周波数成分に基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、観測雑音がないと仮定した時の運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0066】
本実施の形態では、カルマンフィルタによる生体信号の状態推定を行う。一般にカルマンフィルタは、誤差のある観測値を用いて、動的システムの状態を推定あるいは制御するためのフィルタであり、観測値の誤差に応じて観測値と推定値との寄与を調整することができる。このカルマンフィルタのゲインを、車両挙動又は運転操作に応じて切り替えることにより、観測値と推定値とを最適な寄与で使い分けることが可能になり、雑音の多い状況下でも、精度よく生体信号を推定することが可能になる。
【0067】
また、車両の運転者の生体信号を無拘束かつ非接触で計測する場合、車両挙動に起因する受動的な体動による雑音、運転操作等に起因する能動的な体動による雑音が混入するため、精度の高い計測を行うことは困難である。本実施の形態では、体動による雑音が多い状況下でも、生体信号を精度よく推定できる。
【0068】
なお、上記の実施の形態では、X、Y、Zの3軸の加速度を基にΣvtを決定したが、生体信号検出部の出力に与えない座標軸がある場合には、該当する座標軸の加速度は考慮しなくてもよい。また、車両の回転角速度も生体信号検出部の出力に影響する場合は、車両の回転角速度を更に考慮してΣvtを決定してもよい。この場合には、加速度検出部で計測できる座標軸を増やすようにすればよい。
【0069】
次に、第2の実施の形態について説明する。なお、第2の実施の形態に係る生体信号推定装置は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0070】
第2の実施の形態では、各大きさの加速度が加わった場合の、周波数Fiの生体信号の影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列ΣvGXi,jを格納した対照表を用いている点が、第1の実施の形態と異なっている。
【0071】
車両からの加速度入力には、路面の段差などによるインパルス入力も多い。そこで、第2の実施の形態の生体信号推定装置は、以下に説明するように、観測雑音vtの共分散行列Σvtを、加速度検出部14より出力された加速度信号の座標軸ごとの絶対値に応じて決定する。
【0072】
まず、X軸方向の加速度について、図6に示すような、絶対値が各範囲Gi≦Gx<Gjとなる加速度Gxが加わった場合の、周波数Fiの生体信号への影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列ΣvGXi,jを格納した対照表を予め用意しておく。対照表では、各周波数Fiにおいて、加速度Gxの絶対値が大きいほど、対応する観測雑音vtの共分散行列ΣvGXi,jが大きくなるように値が格納されている。各周波数Fiについて、加速度の絶対値GXと対象の周波数Fiとの組み合わせに対する、観測雑音vtの共分散行列ΣvGXi,jにより、X軸方向の加速度に伴うΣvXを求める。また、同様にして、Y軸方向についての対照表を用いて、Y軸方向の加速度に伴うΣvYを求め、Z軸方向についての対照表を用いて、Z軸方向の加速度に伴うΣvZを求める。以上より、求められたΣvX、ΣvY及びΣvZの和をΣvtとして決定する。このように、各周波数Fiについて、観測雑音vtの共分散行列Σvtが決定される。
【0073】
上記図6に示した対照表は、例えば、本実施の形態に係る生体信号推定装置を備えた車両、または本発明に関連する部分に対して、複数の大きさの加速度を入力し、その時の運転者の振動特性を計測することで得ることができる。
【0074】
次に、第2の実施の形態に係る生体信号推定処理ルーチンについて説明する。
【0075】
まず、生体信号検出部12による直近の所定期間分の生体信号を取得すると共に、加速度検出部14による現時刻の加速度信号を取得する。そして、上記で取得した生体信号に対して、高速フーリエ変換を行って、生体信号に対するn/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを生成する。
【0076】
次に、生体信号の周波数配列の周波数を識別するための変数iを初期値1に設定する。また、カルマンフィルタの計算で用いる各種パラメータの初期値を設定する。
【0077】
そして、上記(4)式に従って、現時刻tにおける生体信号の周波数Fiの状態ベクトル^xt|t-1を予測する。次に、上記(5)式に従って、状態ベクトル^xt|t-1の共分散Σt|t−1を予測する。
【0078】
そして、上記で得られた加速度信号の各座標軸における絶対値GX、GY、GZと、予め求められた上記図6に示すX軸方向の対照表、Y軸方向の対照表、Z軸方向の対照表と基づいて、X軸の加速度に伴うΣvX、Y軸方向についてΣvY、Z軸方向についてΣvZを求め、周波数Fiに対する観測雑音vtの共分散行列Σvtを決定する。
【0079】
次に、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で決定された周波数Fiに対する観測雑音vtの共分散行列Σvtとに基づいて、上記(6)式に従って、周波数Fiに対するカルマンゲインKtを算出する。
【0080】
そして、上記で求められた現時刻tにおける周波数Fiの振幅配列Ati、位相配列Ptiと、上記で算出されたカルマンゲインKtとに基づいて、上記(7)式に従って、現時刻tにおける周波数Fiに対する状態ベクトル^xt|tを更新する。また、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で算出されたカルマンゲインKtとに基づいて、上記(8)式に従って、状態ベクトル^xt|tの共分散Σt|tを更新する。
【0081】
上記の各処理を、変数iが、n/2になるまで繰り返し行い、全ての周波数Fiについて、状態ベクトル^xt|tを推定する。
【0082】
そして、上記で求められた各周波数Fiに対する状態ベクトル^xt|tから得られる、生体信号の各周波数Fiの振幅の推定値及び位相の推定値に対して、逆高速フーリエ変換を行うことにより、現時刻tにおける生体信号を算出する。
【0083】
そして、上記で算出された現時刻tにおける生体信号が示す生体信号を出力する。上記の処理を終了するか否かを判定し、終了しない場合には、最初の処理へ戻り、次時刻について同様の処理を行う。
【0084】
なお、第2の実施の形態に係る生体信号推定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0085】
このように、検出された加速度の絶対値に基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、観測雑音がないと仮定した時の運転者の生体信号を推定することにより、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0086】
加速度振幅と観測雑音の周波数帯域との間には直接の因果関係は存在しない。しかし、人体に加速度を入力した場合には、加速度の振幅がある程度までの範囲である場合は、こらえなどにより人体の振動は低減される。また、加速度の振幅がある程度以上の場合は、共振周波数を中心に人体が振動する。また、さらに大きい加速度が入力されると、人体が共振周波数以外の周波数帯域の振動も無視できなくなってくると考えられる。このことから、加速度振幅により、観測雑音の各周波数成分への影響は変化すると考えられる。そこで、本実施の形態では、加速度の振幅(絶対値)と観測雑音の各周波数成分との間の影響度合いに応じて、周波数毎に観測雑音の共分散行列を決定し、カルマンゲインを設定することにより、観測雑音の影響を受けやすい周波数では推定値を多く使い、影響を受けにくい周波数では観測値を多く使うことにより、雑音の少ない周波数の生体信号を残したまま、雑音を低減することができる。
【0087】
なお、上記の実施の形態では、X、Y、Zの3軸の加速度を基にΣvtを決定したが、生体信号検出部の出力に与えない座標軸がある場合には、該当する座標軸の加速度は考慮しなくてもよい。また、車両の回転角速度も生体信号検出部の出力に影響する場合は、車両の回転角速度を更に考慮してΣvtを決定してもよい。
【0088】
次に、第3の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については、同一符号を付して説明を省略する。
【0089】
第3の実施の形態では、ステアリング角速度を検出して、観測雑音の共分散行列を決定している点が、第1の実施の形態と異なっている。
【0090】
図7に示すように、第3の実施の形態に係る生体信号推定装置310は、生体信号検出部12、ステアリング角速度検出部314と、コンピュータ316と、出力部18とを備えている。
【0091】
ステアリング角速度検出部314は、図8に示すように、運転者によって操作されるステアリング350のステアリング角度を検出すると共に、検出されたステアリング角度からステアリング角速度を算出して、算出されたステアリング角速度に応じたステアリング角速度信号を出力する。
【0092】
コンピュータ316は、高速フーリエ変換演算部22と、カルマンフィルタ演算部324と、カルマンゲイン演算部325と、逆フーリエ変換演算部26とを備えている。
【0093】
高速フーリエ変換演算部22は、生体信号検出部12から出力された生体信号に対して、高速フーリエ変換を行う。
【0094】
カルマンフィルタ演算部324は、上記の第1の実施の形態と同様に、上記(A)、(B)、(E)、(F)の手順により、カルマンフィルタを用いて、生体信号の各周波数成分(振幅、位相)を推定する。
【0095】
上記の(C)の手順では、カルマンゲイン演算部325は、ステアリング角速度信号に応じて、観測雑音vtの共分散行列Σvtを決定する。
【0096】
ここで、上記(C)手順において、観測雑音の共分散行列を決定する原理について説明する。
【0097】
ハンドル操作やペダル操作は、その速さや大きさによって、人体の振動に与える影響が異なる。例えば、体動の大きな運転操作であっても、速い動きであれば、観測雑音には低い周波数の振動はあまり含まれず、例えば呼吸などの低い周波数の生体信号は検出しやすい可能性がある。しかし、従来のように観測雑音を白色雑音と仮定する方法では、低い周波数の観測値も推定値に置き換えてしまうため、計測できている信号を活かしきれない.本実施の形態では、操作の速さ(ステアリング角速度)に基づき、観測雑音の共分散行列を設定することにより、従来技術では活かしきれなかった信号を活かすことができる。
【0098】
以上の理由により、ステアリング角速度により、観測雑音が多く含まれている周波数帯域を推定し、その帯域の信号はカルマンフィルタによる推定値を多く用い、それ以外の帯域では観測値を多く用いることにより、できる限りもとの生体信号を残したまま、雑音をカットすることが可能になり、生体信号の検出精度を上げることができる。
【0099】
そこで、本実施の形態では、以下のように、各周波数Fiに対して、観測雑音vtの共分散行列Σvtを、ステアリング角速度検出部314より出力されたステアリング角速度信号に応じて決定する。まず、図9に示すような、各範囲ωi≦ωs<ωjとなるステアリング角速度ωsが加わった場合の、周波数Fiの生体信号への影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列Σvωi,jを格納した対照表を予め用意しておく。対照表では、各周波数Fiにおいて、ステアリング角速度が大きいほど、対応する観測雑音vtの共分散行列Σvωi,jが大きくなるように値が格納されている。各周波数Fiについて、ステアリング角速度の大きさと対象の周波数Fiとの組み合わせに対する、観測雑音vtの共分散行列Σvωi,jをΣvtとして決定する。このように、各周波数Fiについて、観測雑音vtの共分散行列Σvtが決定される。
【0100】
次に、第3の実施の形態に係る生体信号推定処理ルーチンが実行される。まず、生体信号検出部12による直近の所定期間分の生体信号を取得すると共に、ステアリング角速度検出部314による現時刻のステアリング角速度信号を取得する。そして、上記で取得した生体信号に対して、高速フーリエ変換を行って、生体信号に対するn/2点の周波数配列Fi、振幅配列SAti、位相配列SPtiを生成する。
【0101】
次に、生体信号の周波数配列の周波数を識別するための変数iを初期値1に設定する。また、カルマンフィルタの計算で用いる各種パラメータの初期値を設定する。
【0102】
そして、上記(4)式に従って、現時刻tにおける生体信号の周波数Fiの状態ベクトル^xt|t-1を予測する。次に、上記(5)式に従って、状態ベクトル^xt|t-1の共分散Σt|t−1を予測する。
【0103】
そして、上記で得られたステアリング角速度信号が示す角速度ωsと、予め求められた上記図9に示す対照表と基づいて、角速度ωsが含まれる角速度の範囲ωi≦ωs<ωjに対するΣvωi,jを求め、周波数Fiに対する観測雑音vtの共分散行列Σvtを決定する。
【0104】
次に、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で決定された周波数Fiに対する観測雑音vtの共分散行列Σvtとに基づいて、上記(6)式に従って、周波数Fiに対するカルマンゲインKtを算出する。
【0105】
そして、上記で求められた現時刻tにおける周波数Fiの振幅配列Ati、位相配列Ptiと、上記で算出されたカルマンゲインKtとに基づいて、上記(7)式に従って、現時刻tにおける周波数Fiに対する状態ベクトル^xt|tを更新する。また、上記で予測された状態ベクトル^xt|t-1の共分散Σt|t−1と、上記で算出されたカルマンゲインKtとに基づいて、上記(8)式に従って、状態ベクトル^xt|tの共分散Σt|tを更新する。
【0106】
上記の各処理を、変数iが、n/2になるまで繰り返し行い、全ての周波数Fiについて、状態ベクトル^xt|tを推定する。
【0107】
そして、上記で求められた各周波数Fiに対する状態ベクトル^xt|tから得られる、生体信号の各周波数Fiの振幅の推定値及び位相の推定値に対して、逆高速フーリエ変換を行うことにより、観測雑音がないと仮定した時の現時刻tにおける生体信号を算出する。
【0108】
そして、上記で算出された現時刻tにおける生体信号を出力する。上記の処理を終了するか否かを判定し、終了しない場合には、最初の処理へ戻り、次時刻について同様の処理を行う。
【0109】
なお、第3の実施の形態に係る生体信号推定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0110】
このように、検出されたステアリング角速度の大きさに基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、運転者の生体信号を推定することにより、車両の運転者の生体信号を精度良く推定することができる。
【0111】
ステアリング角度ではなくステアリング角速度を用いて、観測雑音の共分散行列を決定するようにした理由は、ステアリングを一定角度で保持している場合は、ステアリング角度が大きくても体動は少なく、生体信号に混入する雑音も小さいと考えられるためである。
【0112】
なお、上述した第1の実施の形態と同様に、ステアリング角速度に対して高速フーリエ変換を行い、ステアリング角速度の各周波数成分と、生体信号の各周波数成分との間の影響度合いに基づいて、各周波数毎に、観測雑音の共分散を決定するようにしてもよい。
【0113】
次に、第4の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については、同一符号を付して説明を省略する。
【0114】
第4の実施の形態では、ペダル角速度を検出して、観測雑音の共分散行列を決定している点が、第3の実施の形態と異なっている。
【0115】
図10に示すように、第4の実施の形態に係る生体信号推定装置410は、生体信号検出部12、ペダル角速度検出部414と、コンピュータ416と、出力部18とを備えている。
【0116】
ペダル角速度検出部414は、図11に示すように、運転者によって操作されるアクセルペダル450のペダル角度を検出すると共に、検出されたペダル角度からペダル角速度を算出して、算出されたペダル角速度に応じたペダル角速度信号を出力する。
【0117】
コンピュータ416は、高速フーリエ変換演算部22と、カルマンフィルタ演算部424と、カルマンゲイン演算部425と、逆フーリエ変換演算部26とを備えている。
【0118】
高速フーリエ変換演算部22は、生体信号検出部12から出力された生体信号に対して、高速フーリエ変換を行う。
【0119】
カルマンフィルタ演算部424は、上記の第1の実施の形態と同様に、上記(A)、(B)、(E)、(F)の手順により、カルマンフィルタを用いて、生体信号の各周波数成分(振幅、位相)を推定する。
【0120】
上記の(C)の手順では、カルマンゲイン演算部425は、ペダル角速度信号に応じて、観測雑音vtの共分散行列Σvtを決定する。ここで、上記(C)手順において、観測雑音の共分散行列を決定する原理について説明する。
【0121】
本実施の形態では、以下のように、各周波数Fiに対して、観測雑音vtの共分散行列Σvtを、ペダル角速度検出部414より出力されたペダル角速度信号に応じて決定する。まず、図12に示すような、各範囲ωi≦ωp<ωjとなるペダル角速度ωpが加わった場合の、周波数Fiの生体信号への影響度合いに応じた、周波数Fiにおける観測雑音vtの共分散行列Σvωi,jを格納した対照表を予め用意しておく。対照表では、各周波数Fiにおいて、ペダル角速度が大きいほど、対応する観測雑音vtの共分散行列Σvωi,jが大きくなるように値が格納されている。各周波数Fiについて、ペダル角速度の大きさと対象の周波数Fiとの組み合わせに対する、観測雑音vtの共分散行列Σvωi,jをΣvtとして決定する。このように、各周波数Fiについて、観測雑音vtの共分散行列Σvtが決定される。
【0122】
なお、第4の実施の形態に係る生体信号推定装置の他の構成及び作用については、第3の実施の形態と同様であるため、説明を省略する。
【0123】
このように、検出されたペダル角速度の大きさに基づいて、各周波数毎に、観測雑音の共分散を決定してカルマンゲインを算出し、カルマンフィルタに従って、車両の運転者の観測状態を含まない生体信号を精度良く推定することができる。
【0124】
ペダル角度ではなくペダル角速度を用いて、観測雑音の共分散を決定するようにした理由は、ペダルを一定角度で保持している場合は、ペダルを大きく踏み込んでいても体動は少なく、生体信号に混入する雑音も小さいと考えられるためである。
【0125】
なお、上記の実施の形態では、アクセルペダルのペダル角速度を検出する場合を例に説明したが、これに限定されるものではなく、ブレーキペダルのペダル角速度を検出するようにしてもよい。
【0126】
また、上述した第1の実施の形態と同様に、ペダル角速度に対して高速フーリエ変換を行い、ペダル角速度の各周波数成分と、生体信号の各周波数成分との間の影響度合いに基づいて、各周波数毎に、観測雑音の共分散を決定するようにしてもよい。
【0127】
また、上述した第1の実施の形態又は第2の実施の形態と同様に加速度信号を用いて決定した観測雑音の共分散と、上述した第3の実施の形態と同様にステアリング角速度信号を用いて決定した観測雑音の共分散と、上述した第4の実施の形態と同様にペダル角速度信号を用いて決定した観測雑音の共分散とを組み合わせて、最終的な観測雑音の共分散を決定するようにしてもよい。
【符号の説明】
【0128】
10、310、410 生体信号推定装置
12 生体信号検出部
14 加速度検出部
16、316、416 コンピュータ
22、23 高速フーリエ変換演算部
24、324、424 カルマンフィルタ演算部
25、325、425 カルマンゲイン演算部
26 逆フーリエ変換演算部
314 ステアリング角速度検出部
414 ペダル角速度検出部
【特許請求の範囲】
【請求項1】
車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサと、
前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段と、
前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段と、
前記生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段と、
を含む生体信号推定装置。
【請求項2】
前記カルマンゲイン算出手段は、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方が大きいほど、前記観測雑音の共分散が大きくなるように決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出する請求項1記載の生体信号推定装置。
【請求項3】
前記生体センサによって出力された出力信号、及び前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の各々に対して、周波数分析を行う周波数分析手段を更に含み、
前記カルマンゲイン算出手段は、周波数の各組み合わせについて、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の予め求められた影響度合いと、前記周波数分析手段による前記操作量及び前記運動状態量の少なくとも一方の周波数分析の結果とに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、
前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定する請求項1又は2記載の生体信号推定装置。
【請求項4】
前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の影響度合いを、周波数が近いほど大きくなるように予め求めた請求項3記載の生体信号推定装置。
【請求項5】
前記生体センサによって出力された出力信号に対して、周波数分析を行う周波数分析手段を更に含み、
前記カルマンゲイン算出手段は、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の大きさの各範囲との間の予め求められた影響度合いと、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の大きさとに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、
前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定する請求項1又は2記載の生体信号推定装置。
【請求項6】
前記計測手段は、前記運動状態量として、前記車両の加速度を計測する請求項1〜請求項5の何れか1項記載の生体信号推定装置。
【請求項7】
前記計測手段は、前記操作量として、ステアリング角速度及びペダル角速度の少なくとも一方を計測する請求項1〜請求項6の何れか1項記載の生体信号推定装置。
【請求項8】
前記生体信号推定手段は、時刻t−1までの出力信号の時系列に基づいて、現時刻tにおける状態ベクトルxt|t-1を予測し、現時刻tにおける観測値としての出力信号ytと、前記予測された状態ベクトルxt|t-1と、現時刻tについて算出されたカルマンゲインKtとに基づいて、現時刻tにおける状態ベクトルxt|tを更新し、現時刻tにおける状態ベクトルxt|tに基づいて、現時刻tにおける観測状態を含まない生体信号を推定する請求項1〜請求項7の何れか1項記載の生体信号推定装置。
【請求項9】
コンピュータを、
前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段、及び
車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段
として機能させるためのプログラム。
【請求項1】
車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサと、
前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段と、
前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段と、
前記生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段と、
を含む生体信号推定装置。
【請求項2】
前記カルマンゲイン算出手段は、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方が大きいほど、前記観測雑音の共分散が大きくなるように決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出する請求項1記載の生体信号推定装置。
【請求項3】
前記生体センサによって出力された出力信号、及び前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の各々に対して、周波数分析を行う周波数分析手段を更に含み、
前記カルマンゲイン算出手段は、周波数の各組み合わせについて、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の予め求められた影響度合いと、前記周波数分析手段による前記操作量及び前記運動状態量の少なくとも一方の周波数分析の結果とに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、
前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定する請求項1又は2記載の生体信号推定装置。
【請求項4】
前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の各周波数成分との間の影響度合いを、周波数が近いほど大きくなるように予め求めた請求項3記載の生体信号推定装置。
【請求項5】
前記生体センサによって出力された出力信号に対して、周波数分析を行う周波数分析手段を更に含み、
前記カルマンゲイン算出手段は、前記出力信号の各周波数成分と、前記操作量及び前記運動状態量の少なくとも一方の大きさの各範囲との間の予め求められた影響度合いと、前記計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方の大きさとに基づいて、前記出力信号の周波数毎に前記観測雑音の共分散を決定し、前記出力信号の周波数毎に決定された前記観測雑音の共分散に基づいて、前記出力信号の周波数毎に前記カルマンゲインを算出し、
前記生体信号推定手段は、前記出力信号の周波数毎に、前記周波数について算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号の周波数成分を推定する請求項1又は2記載の生体信号推定装置。
【請求項6】
前記計測手段は、前記運動状態量として、前記車両の加速度を計測する請求項1〜請求項5の何れか1項記載の生体信号推定装置。
【請求項7】
前記計測手段は、前記操作量として、ステアリング角速度及びペダル角速度の少なくとも一方を計測する請求項1〜請求項6の何れか1項記載の生体信号推定装置。
【請求項8】
前記生体信号推定手段は、時刻t−1までの出力信号の時系列に基づいて、現時刻tにおける状態ベクトルxt|t-1を予測し、現時刻tにおける観測値としての出力信号ytと、前記予測された状態ベクトルxt|t-1と、現時刻tについて算出されたカルマンゲインKtとに基づいて、現時刻tにおける状態ベクトルxt|tを更新し、現時刻tにおける状態ベクトルxt|tに基づいて、現時刻tにおける観測状態を含まない生体信号を推定する請求項1〜請求項7の何れか1項記載の生体信号推定装置。
【請求項9】
コンピュータを、
前記運転者により操作された操作部の操作量及び車両の運動状態量の少なくとも一方を計測する計測手段によって計測された前記操作量及び前記運動状態量の少なくとも一方に基づいて、カルマンフィルタで用いられる観測雑音の共分散を決定し、決定された前記観測雑音の共分散に基づいて、カルマンゲインを算出するカルマンゲイン算出手段、及び
車両側に取り付けられ、かつ、運転者の生体信号を検出して前記生体信号に応じた出力信号を出力する生体センサによって出力された出力信号を観測値として、前記カルマンゲイン算出手段によって算出された前記カルマンゲインを用いたカルマンフィルタに従って、前記運転者の観測状態を含まない生体信号を推定する生体信号推定手段
として機能させるためのプログラム。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−85702(P2013−85702A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228924(P2011−228924)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]