
生体内マーカを使ったターゲットの位置特定
本発明は、生体内マーカの画像化のための方法及び装置に関係するものである。一実施形態では、本方法は、第一の画像化様式で、体内に常駐する複数のマーカを画像化することを含むことができる。本方法はまた、第一のビームアイソセンタに対する、その複数のマーカの第一の座標を特定することも含むであろう。本方法はまた、第二の画像化様式で、その複数のマーカを画像化すること、及び第二のビームアイソセンタに対する、その複数のマーカの第二の座標を特定することも含むであろう。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、医療装置及び手順の分野に関するものであり、特に、体内のターゲットの一特定に関するものである。
【背景技術】
【0002】
放射線治療は、悪性腫瘍のような人(又は動物)体のターゲットボリュームに、選択的に大量の放射線を照射する医療手順を含む。放射線治療の意図は、有害な組織を破壊するように、ターゲットとされる生物学組織に放射線を照射することである。周囲の体組織への損傷を最小にするために、多くの従来の治療方法は、「照射線量細分化」を利用して、各々が予定された全放射線量の一部のみを運ぶように、予定された一連の治療活動において、放射線の適用量を運ぶ。健康な体組織は、典型的には、照射した放射線によって生じた損傷から回復する、より大きい能力を持つ。多くの治療活動にわたって、運ばれる放射線を分散させることは、健康な組織に、放射線の損傷から回復する機会を与え、従って、充分な放射線照射を維持して、腫瘍を破壊すると同時に、健康な組織への永続的な損傷の量を減らす。
【0003】
日々の配置の変動、及び様々な形式の臓器運動は、治療ビームに対するターゲットの位置の不安定性に寄与するということが、知られている。電子ポータル画像装置の画質は、現在、ただ単に正確な患者の配置、及び患者の位置監視の目的のために、ビーム配信の前又は間に、それらの電子ポータル画像を使用して一又はそれ以上の低照射線量の画像を作り出すことができる程度である。
【0004】
従来の2D X線投影画像は、骨の構造のような堅い組織の視覚化を可能にする。しかしながら、放射線治療の多くの柔らかい組織のターゲットは、そのような画像において視覚化することは、困難又は不可能である。例としては、診断用画質の2D X線画像においてさえも見ることのできない前立腺の境界である。それゆえ、キロボルト(KV)及びメガボルト(MV)の両方の2D画像化線形加速器は、患者の配置において、通常、骨構造に依るものであり、従って、前立腺のような柔らかい組織のターゲットが、その骨構造に対して移動する時、その不正確な配置という結果になる。
【0005】
例えば、輝度変調放射線手術(IMRS)のターゲットとしての背骨(椎体)のような、幾つかの骨構造のターゲットにおいてさえも、そのターゲットの位置に加えて、ターゲットの配向も正確に知ることが必要とされる。しかしながら、これらのターゲットの一般的には丸い境界のため、2D X線立体画像のペアに基づく三角測量を使って、それらの格好を正確に推定することは困難である。
【0006】
一つの提案される解決策は、放射線治療室におけるコンピュータ断層撮影(CT)三次元X線画像化の使用である。例としては、オンボード画像化(OBI)又はポータル画像化を使ったレール上CT、及び円錐ビームCTである。幾つかの柔らかい組織のターゲットの境界は、CTスライスでよりよく見える。ターゲットボリューム全体にわたるスライスの集合で、それらの外形を描くことができ、従って、CT画像の治療計画において行われたのと殆ど同じ方法で、3Dでターゲットの輪郭を描くことができる。臨床的に有効であるために、オンライン画像作成様式としての室内CTは、高速立体画像再構成、及び高速CT類似輪郭能力の両方を必要とする。たとえ、高速かつ高信頼の3D類似輪郭が利用可能になったとしても、室内CT設備は追加コストを必要とし、レール上CTの場合、幾つかの診療所におけるスペース要求を抑える。
【0007】
(本発明の実施形態の要約)
本発明は、生体内マーカの画像化のための方法及び装置に関係するものである。一実施形態では、本方法は、第一の画像化様式で、体内に常駐する複数のマーカを画像化することを含むことができる。本方法はまた、第一のビームアイソセンタに対する、その複数のマーカの第一の座標を特定することも含むであろう。本方法はまた、第二の画像化様式で、その複数のマーカを画像化すること、及び第二のビームアイソセンタに対する、その複数のマーカの第二の座標を特定することも含むであろう。
【0008】
本発明の更なる特徴及び利点は、添付図面、及び、以下に続く詳細な説明より明らかであろう。
【0009】
添付図面の図において、本発明を、限定としてではなく、例として図示する。
【0010】
(詳細な説明)
以下の説明では、本発明の完全な理解を提供するために、具体的なシステム、構成要素、方法等の例のような、非常に多くの具体的な詳細が示されている。しかしながら、本発明を実践するのに、これらの具体的な詳細を用いる必要はないということが、当業者には明らかであろう。他の例では、本発明を不必要に不明瞭にするのを避けるために、よく知られた構成要素、又は方法は、詳細に説明していない。
【0011】
本発明は、様々なステップを含み、それらを以下で説明する。本発明のステップは、ハードウェア構成要素によって実施することができる、或いはマシン実行可能な命令で具体化することができ、それらを使用して、汎用又は専用のプロセッサに、その命令でプログラムされたステップを実施させることができる。そのかわりに、ハードウェア及びソフトウェアの組み合わせによって、ステップを実施することもできる。
【0012】
本発明は、コンピュータプログラム製品、又はソフトウェアとして提供することができ、それらは、命令を格納したマシン読み取り可能な媒体を含むことができ、それらを使って、本発明により処理を実施するようにコンピュータシステム(又は、他の電子デバイス)をプログラムすることができる。マシン読み取り可能な媒体は、マシン(例えば、コンピュータ)によって読み取り可能な形(例えば、ソフトウェア、処理アプリケーション)で情報を格納、又は送信するための如何なる機構も含む。マシン読み取り可能な媒体は、磁気ストレージ媒体(例えば、フロッピーディスク)、光学ストレージ媒体(例えば、CD−ROM)、光磁気ストレージ媒体、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、消去可能なプログラム可能メモリ(例えば、EPROM,及びEEPROM)、フラッシュメモリ、電気、光、音響、又は他の形の伝播信号(例えば、搬送波、赤外線信号、デジタル信号等)、又は電子命令を格納するのに適した他の形式の媒体を含むことができるが、それらに限定されない。
【0013】
本発明はまた、一以上のコンピュータシステムによって、マシン読み取り可能な媒体を格納、及び/又は実行する分散コンピューティング環境で実践することもできる。さらに、コンピュータシステム間で転送される情報を、遠隔診断又は監視システムにおけるようなコンピュータシステムを接続する通信媒体をまたがって、プル、又はプッシュのいずれかすることができる。遠隔診断又は監視において、ユーザは、本発明を利用して、ユーザと患者との間の物理的な隔離の存在にも関わらず、患者を診断又は監視することができる。
【0014】
生体内マーカを使った、センサ装置、及び/又はターゲットの体内での位置特定のための方法、及び装置について論じている。一実施形態では、ターゲットは解剖学的標識とすることができ、マーカはマーカ種とすることができる。ターゲットボリュームにおいて、体内に、マーカを埋め込むことができる。(例えば、計画過程の一部として)例えば、治療を計画するために使用されるCTデータセット、シミュレータからの放射線透過画像、又は初日の治療での放射線透過画像のような画像化手法を使って、治療アイソセンタに対して、(例えば、放射線不透過の)マーカを位置特定することができる。位置特定されたマーカは、3D基準位置として働く。次に、後続の治療活動では、その後続の活動で得られた(例えば、X線)画像を使って,再びマーカを位置特定することができる。前に得られた画像と同じ画像化様式、或いは異なる画像化様式を使ってマーカを画像化することができる場合にはその異なる画像化様式、のいずれかを使って、後続の画像を得ることができる。
【0015】
マーカの位置を、それらの基準位置と比較することにより、患者の位置及び配向(及び/又は、治療ビームの方向及び形状)について必要な如何なる調整も特定することができる。治療ビームに対するターゲットの形状が、計画された形状にできるだけ近いように、その調整を特定することができる。
【0016】
一実施形態では、ターゲットは、センサ装置とすることができる。以下の解説は、センサ装置に関するものとすることができるが、そのセンサ装置はまた、応答器又はトランスポンダのような遠隔測定能力を持つこともできる。一実施形態では、説明する方法及び装置は、体内で一又はそれ以上のセンサ装置(例えば、センサ、応答器、トランスポンダ等)を位置特定する手段を提供する。センサ装置は、例えば、注入による埋め込みのような様々な手段によって、体内に置くことができる。その位置は、例えば、腫瘍の隣、通常の組織、又は対象の如何なる他の領域、ともすることができる。例えば、放射線不透過性,超音波、磁気、又は画像化することのできる他の特性、を測定する画像化手法によって、装置を識別することができる。装置の画像化可能特性は、その構成内で一体化しているとすることができる、或いはそれを画像化可能にするために、装置に付加することができる。一実施形態では、装置は、画像化可能なマーカのアレイ又は集合体の一部として、体内に置くことができる。画像化可能なマーカの一又はそれ以上はまた、センサ装置とすることもできる。
【0017】
装置は、例えば、放射線量、温度、pH、代謝、酸素化のような様々な生理学的パラメータの一又はそれ以上を検出する、一又はそれ以上のセンサ要素を含むことができる。一実施形態では、装置は、例えば遠隔計測技術によって、そのような測定値を記録、及び/又は伝送することができる。同様に、装置は、外部信号(例えば、電気、光、超音波、磁気)に応答することができる、或いは、測定されている内部受信信号に応答するようにプログラムされることができる。センサ装置内のセンサ要素の各々の位置を、以下でさらに詳細に解説する一又はそれ以上のマーカに対して、特定することができる。
【0018】
一実施形態では、例えば、装置内に封入された治療薬の放出によって、信号に応答するように、装置を構成することができる。例えば、装置は、外部信号に応答して、「作動状態」になって、体内に注入、或いは別の方法で埋め込まれた他の小さい容器に封じ込められた治療薬、又は診断薬の放出をもたらす第二の局所信号を作り出すことができる。
【0019】
画像処理ソフトウェアを使って、センサ装置を位置特定することができる。一実施形態では、この過程は、様々な視点から取られた画像の解析を含むであろう。画像化される装置の体内での位置は、マーカのアレイと結び付けられることができ、そしてまた、そのマーカのアレイは、画像化方法によって表示される様々な解剖学的位置と結び付けられることができる。従って、センサ装置の位置は、解剖学的標識に対して既知とすることができる。センサ装置が置かれている体の部分の運動によって生じたセンサ装置の移動もまた、積分時間にわたるセンサ装置の位置が直接分かる、或いは数学的にモデル化され、予測できるように、測定することができる。
【0020】
一実施形態では、センサ装置の配向もまた、複数のマーカ、又は複数の画像化特性の使用によって特定することができる。例えば、マーカを、装置上の様々な位置に、或いは装置上に異なるパターンで配置することができる。センサ装置のケースの異なる部分は、異なる画像化特性を持つように製造することができる。体内に幾つかのセンサ装置が置かれている場合には、それらは、各々、異なる画像化マーカ、又は異なる画像化特性を持つことができ、それによって、具体的な装置の位置、ならびに装置の配向を特定することを可能にする。
【0021】
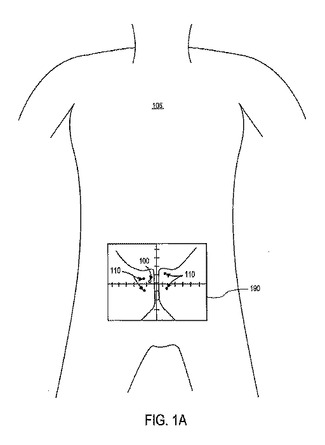
図1Aは、センサ装置、及び複数のマーカ(例えば、マーカ種)を有する患者の体内の前立腺領域の拡大画像を示している。センサ装置100、及びマーカ110は、体内(105)の対象の領域に、又はその近くに置かれる。一実施形態では、図1Aに示すように、センサ装置100を、マーカ種のアレイ110で定められるボリューム内に置くことができる。代替の実施形態では、センサ装置100を、マーカのアレイ110で定められるボリュームの外に置くことができる。
【0022】
例えば、図1Aに示すように、対象の領域は、腫瘍細胞集団を持つ前立腺を包含する体内105のターゲットボリュームとすることができる。マーカのアレイ110は、センサ装置100がマーカのアレイ110で定められるボリューム内に置かれた前立腺の近くに、埋め込むことができる。センサ装置100を、前立腺内に置いて、受信された治療用放射線の照射線量を測定することができる。従来の画像化手法は、センサ装置を位置特定することができるが、体内105における、特に他の解剖学的標識に対する、センサ装置の正確な位置を知ることが望ましいであろう。例えば、センサ装置100を前立腺内に埋め込んで、前立腺の腫瘍に配信された放射線の照射線量を監視する場合には、他の解剖学的標識(例えば、直腸壁)に配信された放射線を推定、さもなければ特定し、後続の放射線治療によるそのような領域への損傷を最小限に抑えるために、これらの他の解剖学的標識へのその装置の近さを知ることが望ましいであろう。
【0023】
図1A及び1Bは、解説を容易にするだけのために前立腺領域を示しており、本発明は、前立腺領域のみで使用することに限定されないことに、注意すべきである。代替の実施形態では、対象の領域は、他の臓器(例えば、肝臓、又は肺)、腫瘍、正常な組織等のような、体内の如何なる他の領域も含むことができる。
【0024】
センサ装置100は、例えば、放射線照射線量、温度、pH、代謝、酸素化のような様々な生理学的パラメータの一又はそれ以上を検出することができる。上記の例を継続しながら、センサ装置100を使用して、前立腺の腫瘍細胞に配信された放射線の照射線量を監視することができる。一実施形態では、センサ装置100は、例えば遠隔計測技術によって、そのような測定値を記録、及び/又は送信することができる。センサ、及び遠隔計測技術は、この技術分野では既知であり、従って、詳細な解説を提供しない。
【0025】
センサ装置100は、外部信号(例えば、電気、光、超音波、磁気)に応答することができる、或いは、測定されている内部受信信号に応答するようにプログラムされることができる。一実施形態では、センサ装置100を、信号に応答して、例えば、センサ装置100に封入された治療薬(例えば、前立腺腫瘍のための化学療法)を放出するように、構成することができる。他の実施形態における他の例では、センサ装置100は、外部信号に応答して、「作動状態」になって、体内105に注入、さもなければ埋め込まれた他の装置(示されていない)内に密封された治療又は診断薬の放出をもたらす第二の局所信号を作り出すこともできる。
【0026】
マーカ110は、以下に説明するように、画像化システムがそのマーカを検出できるように、ターゲット組織ボリュームに対して所定の位置にとどまることを意図されている。一実施形態では、例えば、センサ装置、及び/又はマーカ110を、生検注射器の針内に置くことができる。針は患者の体内に注入され、センサ装置、及び/又はマーカ種110が、針から体組織内へ放出される。そのかわりに、他の方法を使用して、外科手術のように、センサ装置及び/又はマーカ110を埋め込むこともできる。
【0027】
治療の間、例えば、短いx線照射を使用して、画像化の目的のための画像を形成することができる。そのような画像において、骨、及び気道のみは容易に識別でき、柔らかい組織の輪郭描写は限られる。しかしながら、図1Aに示された前立腺領域のようなターゲットボリューム内に置かれたマーカ110は、ターゲットのファクシミリとして働く。例えば、キロボルトのx線又はメガボルトのx線、超音波、或いはMRIのような幾つかの様式のうちの一つを使って、センサ装置100、及び/又はマーカ110を画像化することができる。一実施形態では、マーカ110を使用して、内部座標系を特定することができ、そのような内部座標系に対して、センサ装置100の位置を特定することができる。
【0028】
一実施形態では、マーカ110はマーカ種とすることができる。マーカ種は、ほぼ3.0から6.0ミリメートルの範囲の長さ、及びほぼ0.5から3.0ミリメートルの範囲の直径を持つ円筒形の形状とすることができる。代替の実施形態では、マーカ種は、他の形状(例えば、長方形、球形等)、及び他の直径を有することができる。マーカ110は、マーカ種のみに限定されないことに注意すべきである。そのかわりに、例えば、外科用クリップ、及び整形外科用ねじのような、画像化可能特性を持つ他の形式のマーカデバイスを、マーカ110として利用することができる。
【0029】
従来のマーカ種は、その高密度、大きい原子番号、及び生物学的適合性のため、例えば金及びプラチナのような様々な材料で作られていた。マーカ種は、典型的には、完全にイナクティブなので、それは、体に全く傷をつけない、あるいは患者に不快を生じさせない傾向がある。マーカ110は、患者に一度埋め込まれたら、ターゲットボリュームに対して移動しないことが望ましいであろう。一実施形態では、一又はそれ以上のマーカ110は、滑らかな表面を持つ完全な固形、或いはそのボリューム全体にわたって穴だらけ、とすることができる。そのかわりに、高密度材料、及び多孔性材料の組み合わせを持つマーカ110を使用して、組織の癒着とともに画像化検出性を促進することができる。
【0030】
そのかわりに、他の材料(例えば、タングステン、又はタンタル)、及び材料の組み合わせを、マーカ110に使用することもできる。例えば、MRI画像化を使用すべき場合には、マーカ110の材料を、特にMRI応用例で効果的であるように選択することができる。マーカ110は、磁界の摂動を最小限に抑えるように選択された材料から生成することができる。一つのそのような実施形態では、マーカ110を、反対符号の磁化率を持つ材料の組み合わせで作ることができる。反磁性体(例えば、金)を外部磁界に置いた時、それは、金属の内部から、磁界を排除する傾向がある。摂動されない磁界パターンと比べた時、より多数の磁力線が、金属を貫通するのではなく、金属のまわりを通過するように、磁力線をそらす。反対に、外部磁界内の常磁性体(例えば、プラチナ、及びタンタル)は、反磁性体と反対方向に磁界を摂動させ、それにより、常磁性体を通過する磁力線の数を増やすように磁力線をそらすであろう。
【0031】
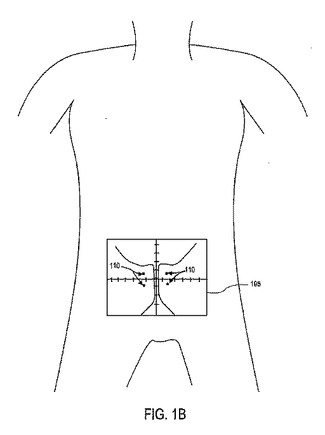
一つの特定の実施形態では、マーカ110は、図1A及び1Bに示すように、(例えば、放射線不透過、音波、磁気、又は他の材料特性を測定する画像化手法による)二又はそれ以上の様式を使って、それらを画像化することができるような材料で構成される。図1Bは、第二の様式で画像化不可能なセンサ装置、及び第二の様式で画像化可能なマーカのアレイを示している。一実施形態では、図1Aの拡大画像190で示すように、第一の様式を使って、マーカ110.及びセンサ装置110の両方を画像化することができる。マーカ110のアレイの画像を使用して内部座標系を確立し、図6に関して以下で説明するように、その確立された内部座標系において、一又はそれ以上のマーカ110に対して、センサ装置100の位置を特定することができる。
【0032】
第二の様式では、マーカ110はまた、図1Bの拡大画像195で示すように画像化することができるが、しかしながら、第二の装置100は、図1Bの拡大画像195内にセンサ装置100がないことで示されるように、この第二の様式では画像化可能ではないとすることができる。そのような実施形態では、画像処理ソフトウェアを使って、第二の画像化様式でのマーカ種のアレイの位置を、第一の画像化様式でのそれらの位置と関連付けて、前に確立された座標系において、センサ装置100を特定することができる。第一の画像化様式で画像化されたセンサ装置100の体内105における位置を特定する。(拡大画像195で示される)第二の様式でのマーカ110のアレイの位置を、座標系において特定した時、次に、センサ装置100の位置を、内部座標系において(すなわち、一又はそれ以上のマーカ110に対して)計算し、図4に関して以下で説明するように、計算システムで表示することができる。定位の過程は、図6に関して、以下でより詳細に論じる。
【0033】
このように、たとえ図1Bの第二の様式195において、センサ装置100を画像化することができなくても、マーカのアレイ110に対して、体内105におけるセンサ装置100の位置を知ることができる。そして次に、これを、その画像化様式で見ることのできる様々な解剖学的標識と結びつけることができる。従って、また、解剖学的標識に対しても、センサ装置100の位置を知ることができる。例えば、センサ装置100が置かれた体の部分の運動によって生じたセンサ装置100の移動もまた、積分時間にわたる装置の位置を直接計算することができる、或いは数学的にモデル化し予測することができるように測定することができる。図6について以下で説明するように、3D位置 対 時間の追跡を実施することができる。一実施形態では、次に、例えば、引用により本出願に組み入れられる「放射線治療の予測生理学的ゲーティングのための方法及びシステム」という名称の係属中の米国特許出願第09/178,383号で説明するように、予測フィルタを使って,結果として生じるマーカの軌跡を処理することができる。そのかわりに、この技術分野で既知の他の予測フィルタを使用することもできる。
【0034】
例えば、呼吸、及び筋肉運動における通常の変動、又は疾患の進行(例えば、頭蓋内の膨張)によって生じる弾性構造(例えば、臓器)の変形のため、対象の体内領域の位置は常に変化する。そのようなものは、領域(例えば、臓器)が固定位置にとどまることを妨げ、治療用放射線を正確な点(例えば、腫瘍)に当てることをより困難にする。センサ装置100を、そのような体内105の歪む解剖学的領域に置いた場合には、外部の比較放射線源に対して、センサ装置100を、同じ固定位置で位置を特定することはできない。また、マーカ種のアレイ110もその歪む解剖学的領域に置いた場合には、そのセンサ装置100の位置をマーカ種のアレイ110と関連付けることにより、体内105でのセンサ装置100のより正確な位置を特定することができる。ターゲットボリューム(例えば、腫瘍)が充分な放射線を受け取ること、及びその周辺の隣接する非ターゲットボリューム(例えば、健康な組織)への損傷を最小限に抑えることを確実にするために、体内105のセンサ装置100の位置をより正確に知ることは、例えば特定の領域における放射線の測定、及び/又は配信を促すことができる。
【0035】
更なる実施形態では、センサ装置100を用いて、或いは用いないでのいずれかで、マーカのアレイ110を使用して、マーカのアレイであって、おそらく解剖学的標識ではない110を直接画像化することのできるシステムを使って、解剖学的標識の位置を特定することができる。そのような実施形態では、解剖学的標識(例えば、骨,臓器、又は他の体の構造)を、第一の画像化様式、及びその第一の画像化様式でまた画像化可能なマーカのアレイ110に対するその体内105における位置を用いて、画像化する。画像化システムは、マーカ種のアレイ110に基づいて内部座標系を生成し、その座標系において、解剖学的標識の位置を特定する。例えば、超音波画像化システムを使用する場合には、その画像化システムは、超音波手法を使って,解剖学的標識の位置、及びマーカ110の位置を検出することができる。検出されたマーカを使って、内部座標系を計算することができる。マーカ110の位置に基づいて、内部座標系に対して(例えば、マーカのうちの少なくとも1つに対して)、解剖学的標識の正確な位置を計算することができる。
【0036】
次に続く活動において、マーカのアレイ110は、第二の画像化様式195で画像化可能であるが、解剖学的標識は不可能であろう。しかしながら、たとえ第二の様式で、解剖学的標識を画像化することができなかったとしても、その解剖学的標識の位置は、前に特定されたマーカ110との位置関係により、なおもその座標系において特定することができる。このように、マーカ110は、図1Bの第二の様式195で画像化可能であるので、確立された内部座標系に基づいて、解剖学的標識の位置を特定することができる。
【0037】
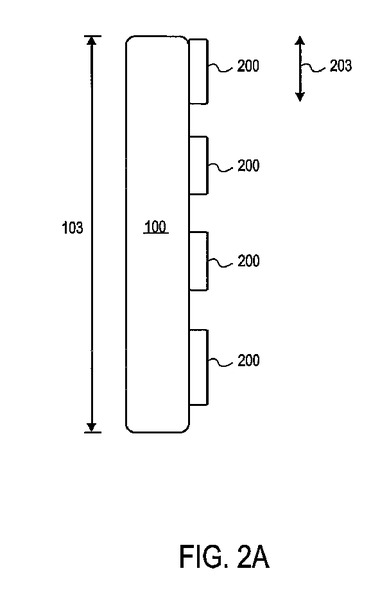
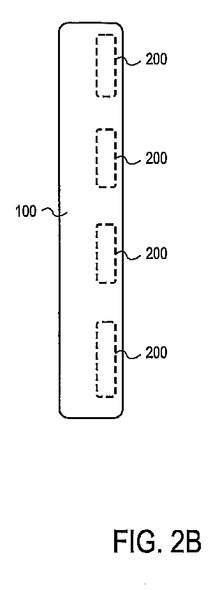
図2Aは、そのケース上に一またはそれ以上のマーカが配置されたセンサ装置の実施形態を示している。この実施形態では、センサ装置100は、そのセンサ装置のケースに結合された複数のマーカ200を含む。図示を容易にするだけのため、4つのマーカを持つようにセンサ装置を示している。代替の実施形態では、センサ装置100は、4以上又は以下のマーカ200を持つ、或いは全くマーカを持たないであろう。図2Aは、センサ装置100の全長103に沿って配置されたマーカ200を示しているが、マーカ200は、センサ装置100上に如何なる形状でも配置することができる。一実施形態では、全長103は、例えば、26ミリメートル以下とすることができる。そのかわりに、センサ装置100は、他の長さを持つこともできる。他の実施形態では、図2Bに示すように、マーカ200を、センサ装置200内に配置することもできる。
【0038】
一つの特定の実施形態では、例えば、マーカ種200は、円筒形の形状であり、ほぼ3.0〜6.0ミリメートルの範囲の長さ、及びほぼ0.5〜3.0ミリメートルの範囲の直径を持つことができる。代替の実施形態では、マーカ種200は、他の形状(例えば、長方形、球形等)、及び他の寸法を持つことができる。
【0039】
センサ装置100は、一度、患者内に埋め込まれると、ターゲットボリュームに対して移動しないことが望ましい。一実施形態では、一又はそれ以上のマーカ200は、滑らかな表面を持つ完全な固形、或いはそのボリューム全体にわたって穴だらけであるとすることができる。そのかわりに、一又はそれ以上のマーカ200は、それを使用して、組織の癒着とともに画像化検出性を促進することのできる、高密度材料及び多孔性材料の組み合わせを持つこともできる。
【0040】
そのかわりに、マーカ200について、他の材料(例えば、タングステン、又はタンタル)及び材料の組み合わせを使用することもできる。例えば、MRI画像化を使用する場合には、マーカ200の材料を、MRI応用例で特に効果的であるように選択することができる。マーカ200は、磁界の摂動を最小限に抑えるように選択された材料から生成することができる。一つのそのような実施形態では、図1Aのマーカ110に関して上で説明したように、逆の符号の磁化率を持つ材料の組み合わせで、マーカを作ることができる。
【0041】
図3は、複数の画像化特性を持つケースを有するセンサ装置の一実施形態を示している。一実施形態では、例えば、センサ装置100のケースの異なる部分(例えば、310及び320)を、異なる画像化特性を持つように製造することができる。
【0042】
前で述べたように、マーカ200及び/又は画像化特性を、センサ装置100上の様々な位置に、或いはセンサ装置100上に様々なパターンで配置することができる。このように、センサ装置100の配向を、図2A、2Bの複数のマーカ、又は図3の複数の画像化特性の領域(例えば、310及び320)の使用を通して特定することができる。幾つかのセンサ装置100を体内105に置いた場合には、その上/その中に配置された複数の画像化マーカ、又はセンサ装置の構成(例えば、そのケースの部分)に一体化された複数の画像化特性の手段を通してというように、それらは各々、異なるマーカ特性を持つことができ、それによって、具体的な装置の位置、ならびに装置の配向を特定することを可能にする。
【0043】
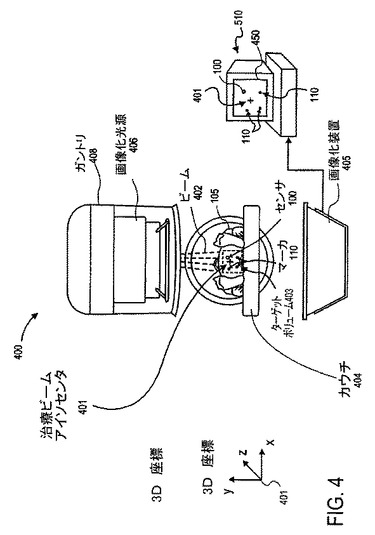
図4に示すような画像システムによって、一又はそれ以上のセンサ装置100、又はマーカ110の位置を突き止めることができる。図4は、治療計画及び/又は配信システムを表すシステム400の一実施形態を示している。処理計画システムについて時々説明する一方で、システム400はまた、治療配信システムも表している。このように、ビーム402は、解説の状況によって、画像化ビーム、及び治療用ビームの両方を表すことができる。計画システム、及び治療システムは、物理的に異なる機械、或いは機械内に一緒に組み込まれている、とすることができる。例えば一実施形態では、配信システムは、例えば、カリフォルニアのVarian Medical Systems Inc.から市販されているClinac(登録商標)線形加速器、及び多葉コリメータ(MLCTM)とすることができる。示されたシステムの構成400は、説明及び図示を容易にする目的のためだけのものであり、この技術分野で既知の様々な他の構成も使用することができ、例えば、画像装置405を、処理用テーブル404内に組み込むのではなく、ガントリ上に置くこともできる。説明を容易にするだけのために、特定の画像化様式について、画像化システム400を説明することができ、上で言及したように、他の画像化様式も使用することができることもにもまた、注意すべきである。
【0044】
治療用テーブル404、及び画像化装置405によってサポートされる人体105を、図4に示している。画像化光源(例えば、キロボルトx線、メガボルトx線、超音波、MRI等)406を、例えばガントリ408内に置くことができ、画像化装置405を、例えば画像化光源406と逆側の人体105の下に置くことができる。画像化装置405は、画像化光源406によって生成されたビーム402を検出、及び受信できるように置かれる。画像化装置405の出力画像は、コンピュータ510へ送信される。
【0045】
コンピュータ510は、少なくとも1つのマーカ110、センサ装置100、及び/又は解剖学的標識の画像を含む、画像化装置406の出力画像を受信する。画像化装置406から受信された画像を、コンピュータ510で使用して、マーカ110の座標系を創り出す。第一の画像化様式を使った第一の治療活動において、マーカ種110、及びセンサ装置100(及び/又は解剖学的標識)を検出し、マーカ110の各々の座標を特定し、コンピュータ510内に格納する。その後、次の活動において、異なる画像化様式を使って、システム400は、マーカ100を検出し、コンピュータ510内の格納されたデータとの比較により、座標系において、それらの位置を特定することができる。次に、第二の様式で画像化可能でないセンサ装置110及び/又は解剖学的標識の位置を、上で説明したように、前に確立された座標系を使うことによって、コンピュータシステム510により特定することができる。
【0046】
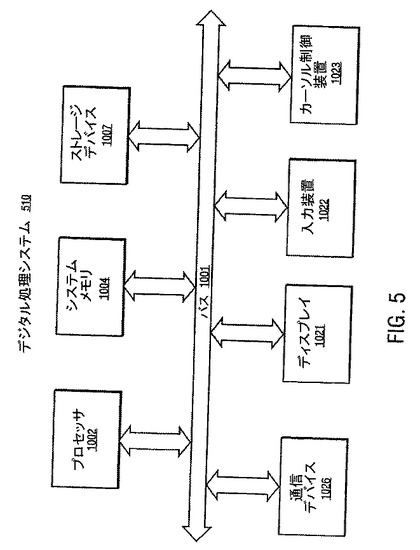
図5は、ワークステーション、パーソナルコンピュータ、ラップトップコンピュータ、ハンドヘルドコンピュータ、携帯型情報端末(PDA)、閉回路監視ボックス等の例を表す、図4のデジタル処理システム510の一実施形態を示しており、そこに、本発明の機能を実装することができる。
【0047】
デジタル処理システム510は、デジタル処理システムの構成部品間でデータを転送するためのバス、又は他の手段1001を含む。デジタル処理システム510はまた、情報を処理するための、バス1001と結合されたプロセッサ1002のような処理手段を含む。プロセッサ1002は、一又はそれ以上の汎用プロセッサ(例えば、モトローラ パワーPC プロセッサ、及びインテル ペンティアム プロセッサ)、又はデジタル信号プロセッサ(DSP)(例えば、テキサス インストゥルメンツ DSP)のような専用プロセッサを表すことができる。プロセッサ1002は、本出願で説明する操作及びステップを実施するための命令を実行するように、構成することができる。例えば、プロセッサ1002は、命令を実行して、そのプロセッサに血管介入場所を追跡させるように構成することができる。
【0048】
デジタル処理システム510は、さらに、プロセッサ1002により実行される情報及び命令を格納するための、バス1001に結合される、ランダムアクセスメモリ(RAM)、又は他の動的ストレージデバイスを含み得るシステムメモリ1004を含む。システムメモリ1004はまた、プロセッサ1002による命令の実行の間、一時的な変数、又は他の中間情報を格納するために使用することができる。システムメモリ1004はまた、プロセッサ1002のための静的な情報及び命令を格納するための、バス1001に結合された読み出し専用メモリ(ROM)、及び/又は他の静的なストレージデバイスを含むこともできる。
【0049】
ストレージデバイス1007は、情報、及び命令を格納するための、バス1001に結合された一又はそれ以上のストレージデバイス(例えば、磁気ディスクドライブ、又は光ディスクドライブ)を表している。本出願で説明したステップを実施するための命令を格納するために、ストレージデバイス1007を使用することもできる。
【0050】
一実施形態では、またデジタル処理システム510を、ブラウン管(CRT)又は液晶ディスプレイ(LCD)のような、情報をユーザに表示するための表示装置1021に、バス1001を介して結合することができる。このような情報は、図4の画像450に示されるような座標系、マーカ、センサ装置、及び/又は解剖学的標識のような図形、及び/又はテキストの描写を含むであろう。情報、及び/又はコマンド選択をプロセッサ1022へ伝達するために、ライトペンのような入力装置1022を、バス1001に結合することができる。更なる形式のユーザ入力装置は、マウス、トラックボール、又はカーソル方向キーのような、方向情報及びコマンド選択をプロセッサ1002へ伝達し、ディスプレイ1021上のカーソル移動を制御するためのカーソル制御1023である。
【0051】
また、通信デバイス1026(例えば、モデム、又はネットワークインターフェースカード)を、バス1001に結合することもできる。例えば、通信デバイス1026は、イーサネットカード、トークンリングカード、或いは、遠隔診断、又は監視システムのような、デジタル処理システム510が接続を確立しているネットワークへの通信リンクを提供するための他の形式のインターフェース、とすることができる。
【0052】
デジタル処理システム510は、多くの異なる構成及びアーキテクチャを持ち得り、かつ本発明で用いることのできるシステムのたった1つの例を表している、ということがわかるであろう。例えば、幾つかのシステムは、しばしば、周辺バス、専用キャッシュバス等のような複数のバスを持つ。
【0053】
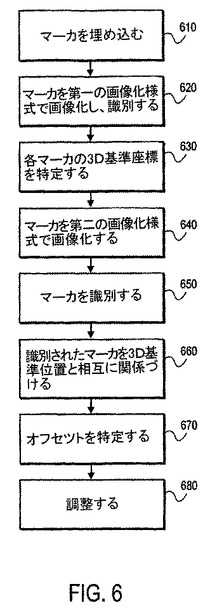
図6は、標識の位置を突き止める方法の一実施形態を示している。治療計画段階において、マーカ110(及び、望まれる場合には、一又はそれ以上のセンサ装置100)を、図4のターゲットボリュームB403内に埋め込む、ステップ610。図1A及び1Bに関して上で説明した手法で、埋め込みを実施することができる。典型的には、腫瘍の放射線治療計画プロセスの一部として、放射線ビーム内で、体、従って腫瘍を正確に配置するために、患者を治療するために使用される(既知のサイズ及び形状を持つ)治療用ビームのアイソセンタを、(例えば、医師によって)特定する。例えば、治療計画の間、ターゲットボリューム403を通る、体105の一連のCTスライスを取ることができる。医者は、(例えば、2D又は3Dのいずれかで表される)CTスライスで腫瘍を見て、一又はそれ以上のCTスライスのコンピュータ501のディスプレイ上で、治療ボリューム403の境界を定めることができる。この技術分野で既知の治療計画ソフトウェアを使って、定められた境界に基づいてアイソセンタ401を計算することができる。一実施形態では、例えば、カリフォルニアのVarian Medical Systemsから市販されているEclipseTM治療計画ソフトウェアを使用することができる。そのかわりに、他の治療計画ソフトウェアを使用することもできる。そのような正確な配置は、周辺の正常な組織への放射線の照射量を最小限に抑えると同時に、腫瘍に配信される治療用放射線の照射量を最大化する。
【0054】
一実施形態では、治療計画プロセスの一部として、治療用機械ビーム402のアイソセンタ401(従って、ターゲットボリューム403)に対して、埋め込まれたマーカ110の3D座標の位置を特定することができる。例えば、ターゲットボリューム403を通る、体105の一連のCTスライスを使って、第一の画像化様式で、マーカ110を画像化することができる、ステップ620。CTは、体105を通って投影されたスライスで、ボリューム要素(ボクセル)あたりの平均x線吸収を測定する。この技術分野で既知の自動化、又はユーザ支援手法を使って、(例えば、コンピュータシステム510を使って)CTスライスでマーカ110を特定することができる計画用CTセット。そのかわりに、他の画像化様式で、また他の時間(例えば、治療計画活動の前又は後)において、マーカ110の定位を実施することができる。マーカ110の3D基準座標の特定のために、第一の様式の画像を、コンピュータシステム(例えば、コンピュータシステム510)に移入することができる。
【0055】
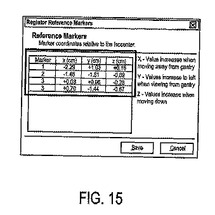
ステップ620からの情報を使い、治療用ビームのアイソセンタ401が既知であると仮定すると、そのアイソセンタ401に対する各マーカ110の3D基準座標を、その技術分野で既知であるソフトウェア手法を使って特定することができる、ステップ630。マーカの位置特定を、治療計画より前(従って、アイソセンタ401が知られる前)に実施する実施形態では、マーカのボクセル座標を(例えば、コンピュータシステム510に)格納し、アイソセンタ401が特定されると、そのボクセル座標を、そのアイソセンタ401に対する基準座標に変換することができる。例えば、一実施形態において図15に示されるようなグラフィカルユーザインターフェースを使って、基準マーカの座標をユーザに表示することができる。この実施形態では、アイソセンタ401に対する各マーカの3D基準座標(x、y、z)は、マーカがガントリ408からより離れるとき増大する正のx値、ガントリ408から見てマーカが左へ離れるとき増大する正のy値、マーカがガントリ408から下方向により離れるとき増大する正のz値で、特定される。そのかわりに、座標について、他の位置関係を使用することもできる。
【0056】
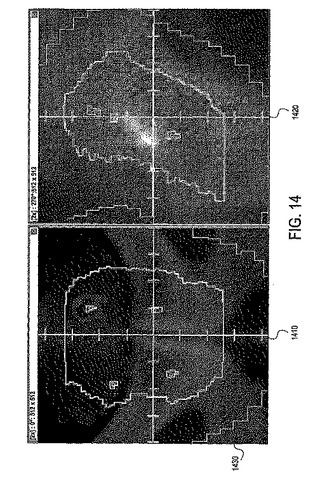
他の方法を使用して、マーカ110の位置を特定することができることに、注意すべきである。更なる実施形態では、例えば、図14に示すように、CTセットを使って様々な視野角から作り出されたデジタル再生放射線透過写真(DRR)を使って、この技術分野において既知の三角測量手法によって、マーカの位置を特定することができる。図14は、例えば、視野角Aに対して、第一の視野角1410、及び第二の視野角1420が270°をなしていることを示している。図14のDRRは、マーカのフィールド形状(例えば、フィールド形状1430)を含むことができる。また更なる実施形態では、グラフィカルユーザインターフェースを通したそのような座標入力、又はマーク付けの手法を使って、マーカ110の位置を、システムのユーザによって、手動で入力することができる。
【0057】
前に言及したように、毎日の治療用機械のセットアップの変動、及び治療計画活動において生じた様々な形式の臓器運動は、特定の治療活動の間の、治療用機械ビーム402のアイソセンタ401に対するターゲットボリューム403の位置の不確定さに寄与する。如何なるそのような位置の片寄りも最小限に抑えるために、マーカ110を使用して、ターゲットボリューム403を、治療用ビーム402とよりぴったりと一線上に揃える。ステップ630において、計画のアイソセンタ401に対する各マーカ110の3D基準座標を特定したので、治療活動の間、マーカ110が画像化可能である場合には、治療時における既知のビームアイソセンタに対するマーカ110の位置の如何なるオフセットも、特定し、調整することができる。
【0058】
特定の治療活動において、これを実現するために、マーカ110を第二の様式で画像化する、ステップ640。第二の様式は、第一の様式と同じとすることもできる。そのかわりに、ステップ640において画像を獲得するために使用される第二の画像化様式は、第一の画像化様式とは異なるものとすることもできる。一実施形態では、第二の様式の画像は、例えばMVポータル画像装置、及び/又はKV画像装置を使って獲得されるX線画像とすることができる。画像装置405の基準座標は、治療用機械のアイソセンタ401に対して較正される、と仮定する。
【0059】
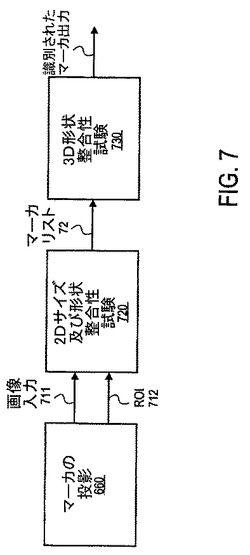
ステップ650では、第二の様式の画像(例えば、X線)内のマーカ110(例えば、放射線不透過)を特定する。第二の様式の画像は、マーカとみなされ得るマーカでないオブジェクト、又は画像(偽マーカ)を含み得る、ということに注意すべきである。一実施形態では、図7に関して解説するように、誤って検出されたマーカを、識別されたマーカのセットから取り除くことができる。
【0060】
ステップ660では、獲得された画像の既知の形状に基づいて、マーカを3Dから2D画像領域の投影した後、ステップ650の第二の様式の画像内で識別された各マーカ110を、ステップ620において特定されるようなその3D基準位置と互いに関連付けられる。一実施形態では、ステップ650において識別されたマーカ110は、図7に関して以下で解説する一貫性試験を通過したマーカである。もう1つの選択肢として、一貫性試験を用いる必要はない、或いは他の形式の選別を実施して、識別されたマーカのセットに到達することもできる。
【0061】
識別されたマーカ110の2D座標を使って、治療用機械のアイソセンタ401に対する、そのマーカのセットの位置、及び配向を見つける、ステップ660。一実施形態では、治療用機械のアイソセンタ401に対するマーカ110の位置及び配向を、二又はそれ以上の画像から、三角測量によって特定することができる。例えば、様々な位置においてとられた一又はそれ以上の画像からのデータを混ぜ合わせることにより、治療ボリューム403の立体表示を得ることができる。治療用カウチ404は、治療用機械400における操作半径内に、患者、従って治療ボリューム403を配置することができる。単一のガントリ408の位置において、或いはガントリの回転によって、様々な半径方向の位置において、複数の単一画像を生成することができ、任意の2つの画像を選択して、コンピュータ510によって、治療ボリュームの立体表示に合成することができる。立体表示を生成して、選択された半径方向位置における2D断面データを提供することができる。立体表示を使用して、既知の治療ビームのアイソセンタ410に対するマーカ110の3D座標を特定することができる。そのかわりに、他の三角測量手法を用いることもできる。三角測量手法は、この技術分野では既知であり、従って、詳細な説明は提供しない。
【0062】
更なる例として、代替の実施形態では、引用により本出願に組み入れられる係属中の米国特許出願10/234,658号で説明するように、ステップ630の基準マーカ座標によって定められる堅い構造の単一の表示位置、及び配向の推定を使って、治療用機械のアイソセンタ401に対するマーカ110の位置、及び配向を特定することができる。前者の実施形態の方法は、前立腺、又は肝臓のような、より堅くないターゲットにより適しているであろう。後者の実施形態の方法は、骨組織のような密に堅いターゲットに対して効果的であろう。そのかわりに、さらに他の方法を使用して、マーカのセットの位置及び配向を特定することもできる。
【0063】
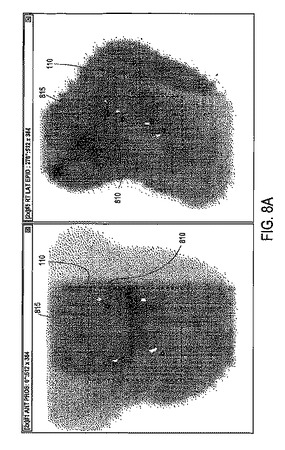
検出されたマーカについて、各マーカ110の3D座標を、その対応する3D基準座標(例えば、図8Aの3D基準座標の位置810)と比較して、2つのデータセット間のオフセットを(例えば、デルタx,y,z値の形で)特定する、ステップ670。理論的には、患者の体105を完璧に配置した場合には、2つのデータセット間に全くオフセットがない、すなわちマーカ110のはずである。しかしながら、実際には、図8Aに示すように、2つのセット間には、いくらかのオフセット(例えば、オフセット815)が存在するであろう。
【0064】
ステップ650において、埋め込まれたマーカ110の幾つかを画像化、又は識別できることにもまた注意すべきである。ステップ650において識別されなかったマーカの位置を、ステップ620で得られた基準マーカ位置間の位置関係に基づいて特定することができる。一実施形態では、剛体変換は、基準マーカセットに適用される時、識別されたマーカ110の3D座標間の平均二乗誤差を最小にすると推定されるであろう。ステップ650の第二の画像化様式で検出されなかったマーカを含む基準マーカセットに剛体変換を適用した時、その第二の画像化様式で検出されなかったマーカの推定位置を得ることができる。一実施形態では、例えば、検出されなかったマーカは、実際には、図1Bの第二の様式195、又は図6のステップ640で画像化可能でない(マーカ特性を持つ、或いは持たない)センサ100ということもある。代替の実施形態では、例えば、検出されなかったマーカは、実際には、マーカの1つではなく、解剖学的標識ということもある。
【0065】
ステップ680では、基準マーカセットと治療活動のマーカセットとの間のオフセット位置、及び配向の差異に基づいて、ターゲットボリューム403についての治療形状と計画形状との間の最も良い一致を実現するために、患者のセットアップに対して必要な調整(例えば、カウチ404の位置、及び/又は配向)、及び/又は治療ビーム402に対して必要な調整(例えば、ガントリ408の角度、コリメータの回転角等)を推定することができる。他の手法でもオフセット情報を特定できることに、注意すべきである。代替の実施形態では、例えば、基準マーカセット、及び治療活動の検出されたマーカセットの両方の質量の中心(重心)を計算、及び比較して、その2つの間の位置オフセットを特定することができる。
【0066】
図7は、画像内でマーカを検出し、偽マーカを取り除く一実施形態を示している。この実施形態では、ステップ650において誤って検出されたマーカを、識別されたマーカのセットから取り除くことができる。ステップ660に関して上で説明したように、得られた画像の既知の形状に基づいてマーカ110を投影した後、画像711、及びその画像における対象の領域(ROI)712を、2Dサイズ及び形状の整合性試験に提供する、ステップ720。2Dサイズ及び形状の整合性試験を実施して、画像内のマーカを識別する。一実施形態では、中央値フィルタ、及び/又は接続構成要素解析を利用した自動検出アルゴリズムを使って、2Dサイズ及び形状の整合性試験を実施することができる。
【0067】
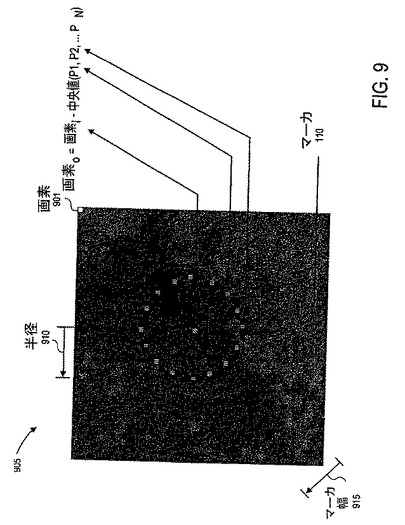
図9は、マーカを含む画像の中央値フィルタリングの一実施形態を示している。中央値フィルタ905を使用して、画像の画素の輝度値をフィルタリングして、特定の画像画素がマーカ(又は、他の画像化可能なオブジェクト)の一部、或いは背景ノイズを含むかどうか特定することができる。
【0068】
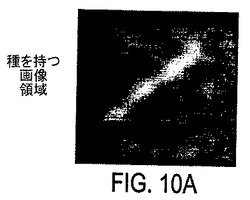
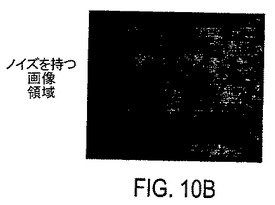
この実施形態では、画像内の特定の数の画素(例えば、画素901、画素I、等)について、その中心画素(例えば、画素I)のまわりの(特定の近似半径を有する)ほぼ円形又は「リング状」の特定の数の周辺画素(例えば、P1,P2,PN等)を、中央値フィルタが推定する。中央値フィルタ905は、周辺画素(例えば、画素P1,P2等)の中央輝度値をとり、その中央値を推定された中心画素から引いて、フィルタリングされた画素輝度値 画素0を出力する。画素0を使用して、以下の図10−12に示すように、フィルタ画像を生成する。中央値フィルタ905の効果は、画像の背景輝度ノイズを取り除いて、以下の図10A及び10Bで示すような、マーカ110と元々の画像背景との間のよりよく目に見える区別を有するフィルタ画像を作りだすことである。
【0069】
特定の一実施形態では、例えば、N=16である(すなわち、リング状の中央値フィルタが16個の周辺画素を推定する)。マーカ幅915の半分より大きくなるように、半径910を選択する。特定の一実施形態では、例えば、画素の既知のサイズ、及び埋め込まれたマーカ110の既知のサイズに基づいて、ほぼ10画素となるように、円の半径910を選択する。他の実施形態では、リングの直径(2×半径910)を、マーカ幅915の幅のほぼ2.6倍となるように選択し、それは画素901のサイズとは無関係である。これは、リングがマーカ110と交差している時でさえも、中央値統計データが背景(マーカでない)画素の中央値を表すようにさせる。
【0070】
そのかわりに、他の評価領域の周辺形状(例えば、楕円、長方形、正方形等)、寸法、画像内で推定された画素の数、周辺画素の数等を使用することもできる。代替の実施形態では、他のフィルタリング(例えば、平均値フィルタリング)、及びこの技術分野で既知の背景減算手法を使用することもできる。
【0071】
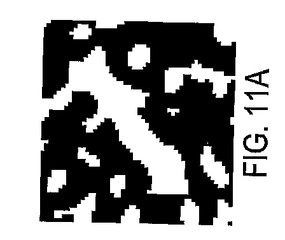
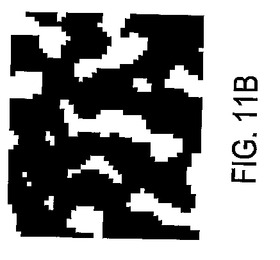
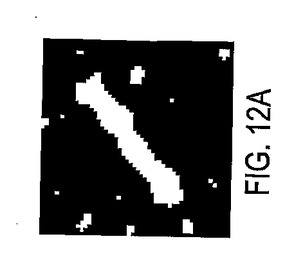
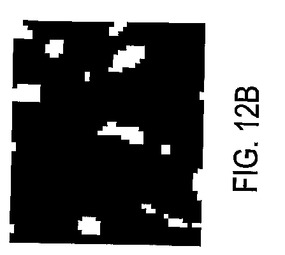
図10A及び10Bは、それぞれ、2Dサイズ及び形状整合性試験720における中央値フィルタ905の使用の後の、一つのマーカを含む画像のROI、及び全くマーカを含まない画像(単なる背景)のROIを示している。図7に関して上で説明したように、一実施形態では、図7に関して上で説明したように、一実施形態では、2Dサイズ及び形状の整合性試験720はまた、接続構成要素解析を利用して、さらに、画像の背景からマーカを仕切ることができる。接続構成要素解析では、画像内の全ての接続された構成要素を見つける。ノイズの外形を取り除くために、閾値によって、小さい面積を持つ領域をフィルタリングする。マーカ110のサイズに基づいて、スレッショルドを減少、又は増加させることができる。図11A及び11Bは、それぞれ、低スレッショルドでの接続構成要素解析後の、一つのマーカを含む画像のROI、及び全くマーカを含まない画像のROI(単なる背景)を示している。図12A及び12Bは、それぞれ、図11A及び11Bの画像において使用された閾値より高い閾値での接続構成要素解析後の、一つのマーカを含む画像領域、及びマーカを全く含まない画像領域(単なる背景)を示している。接続構成要素解析手法は、この技術分野で既知であり、従って、詳細な説明は提供しない。
【0072】
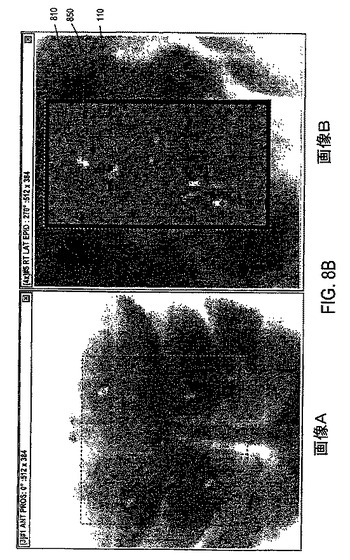
図7を参照し返すと、2Dサイズ及び形状の整合性試験720を実施した後、次に、識別されたマーカのマーカリスト721を、3D形状整合性試験730へ出力する。3D形状整合性試験730を使用して、偽マーカをふるい落とすことができる。一実施形態では、エピポーラコインシデンス拘束を使って、3D形状整合性試験730を実施することができる。図8Bに示すように、この条件は、立体画像のペアの可用性に基づいている。画像A内の点(画素の位置)は、3D空間において、線として逆投影される。立体ペアのもう一方の画像Bにおける3D線の画像は、エピポーラ線850である。それゆえ、一方の画像(例えば、画像A)においてマーカ110を検出した時、もう一方の画像(例えば、画像B)におけるその投影は、マーカ110の第一の画像位置のエピポーラ線850上にある、或いは非常に近いはずである。予想される近さの度合いは、較正エラーの量に依る。エピポーラ拘束を使用して、一つの画像において、他の画像における検出に基づいて検出のための探索領域を定め、その制約を満たさない誤った検出を除くことができる。時々、マーカ110は、一方の画像において高い信頼度で検出されるが、その一方で、立体ペアの他方の画像では殆ど見えないことがある。一実施形態では、エピポーラ線850を使用して、マーカ110がよく見えない方の画像において、より低い検出閾値で探索領域を設定する。
【0073】
対象の領域、或いは一又はそれ以上のマーカについて、2Dサイズ及び形状の整合性試験、及び3D形状整合性試験を実施することができる。より少ない画像、及び/又はより少ないマーカの場合においては、図6及び7の上記のステップのサブセット又は変形を使用することができる、ということに注意すべきである。
【0074】
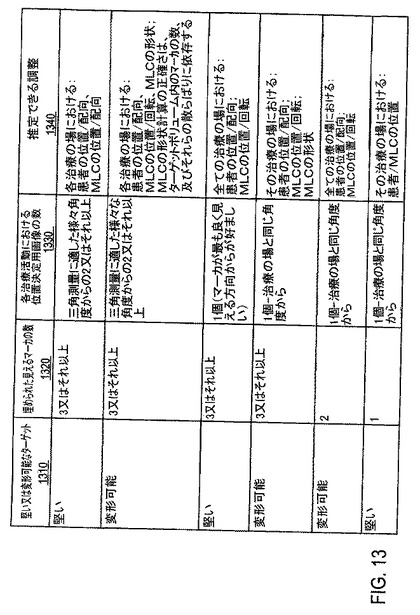
前に言及したように、治療活動におけるマーカ110の位置を、それらの基準位置と比較することにより、患者の体105の位置及び配向、及び/又は治療ビーム402の方向及び形状に対する調整を、治療ビーム402に対する実際のターゲットボリューム403が、可能性のある標識の変形(例えば、腫瘍)を適応させるように、ビーム形状に対して可能な調整をされた計画ターゲットボリューム403にできるだけ近くなるような方法で、計算することができる。推定することのできる患者、及びビームの調整、及びその推定の正確さは、埋め込まれたマーカ110の数、治療活動において第二の画像化様式で生成された画像内で見えるマーカ110の数、治療活動において得られた画像の数、及びターゲットボリューム403の堅さによって変化する。例のケースは、図13の表に関して以下で説明するケースを含む(が、それらに限定されない)。
【0075】
図13は、様々な位置特定パラメータ間の関係を示す表である。表1300は、カラム1310、1320、1330、及び1340を含む。カラム1310は、ターゲットボリュームの堅さ(例えば、治療行程にわたるマーカ110間の間隔がどのくらい固定されているか)についての情報を含む。カラム1320は、画像内で見える、埋め込まれたマーカ110の数を含む。カラム1330は、推定することのできる患者の体105、及び/又は治療ビーム402の位置決めに対する調整を含む。カラム1340は、各治療活動において必要となり得る位置決定用画像の数を含む。
【0076】
一実施形態では、推定することのできる(例えば、患者、及び/又はビームの)調整(及びその推定の正確さ)、及び治療活動の間に必要とされ得る位置決定用画像の数は、(1)ターゲットの堅さ、及び(2)画像内で見えるマーカの数、に基づくものとすることができる。
【0077】
ターゲットの堅さは、相対語で定めることができる。上の表で言及した推定調整のうちの幾つかを実装する有効性は、ターゲットがどれくらい堅いかに依存する。例えば、堅さの仮定は、一般的には、骨のターゲットに付けられたマーカ110として認められ得るものである。これに対して、前立腺は、骨のターゲットよりいくらか広い範囲までの治療の行程の間、変形し、サイズが変化するであろう。前立腺を変形可能なターゲットとして治療し、各治療活動の各場において、MLCの形状を実際に調整するためには、ターゲットボリューム403じゅうにある程度均一に散らばった、より多数のマーカ110が、必要とされるであろう。MLCは、例えば、両方とも引用により本出願に組み入れられる米国特許第5,166,531号、及び第4,868,843号で解説される。
【0078】
前述の明細書では、本発明を、その特定の実施形態の例について説明した。しかしながら、添付の特許請求の範囲で示されたような、本発明のより広い技術的範囲から逸脱することなく、それに様々な修正及び変更が成され得ることが、明らかであろう。例えば、マーカの3D基準座標を、ビームのアイソセンタと直接結びつける必要はない。マーカ110の基準座標を、他の座標系(例えば、場所外の座標)、又はビームアイソセンタとの既知の関係を有するオブジェクトとの対応関係によって、間接的に、アイソセンタに対して特定することもできる。従って、本明細書、及び図面は、限定的な観点ではなく、例示的な観点で考えられるべきである。
【図面の簡単な説明】
【0079】
【図1A】センサ装置、及び複数のマーカ種を有する患者の体の前立腺領域の拡大画像を示している。
【図1B】第二の画像化様式を使った、画像化可能なマーカのアレイ、及び画像化可能でないセンサ装置を有する前立腺領域の拡大画像を示している。
【図2A】その上にマーカが配置されたセンサ装置の一実施形態を示している。
【図2B】その中にマーカが配置されたセンサ装置の代替の実施形態を示している。
【図3】複数の画像化特性を持つケーシングを有するセンサ装置の一実施形態を示している。
【図4】画像化システムの一実施形態を示している。
【図5】図4のデジタル処理システムの一実施形態を示している。
【図6】位置特定方法の一実施形態を示している。
【図7】マーカを検出し、画像内の偽マーカを取り除く一実施形態を示している。
【図8A】異なる時間において画像化された内部マーカ間の位置オフセットの一実施形態を示している。
【図8B】立体画像のペア、及びエピポーラ線の一実施形態を示している。
【図9】マーカを含む画像部分の中央値フィルタリングの一実施形態を示している。
【図10A】中央値フィルタの使用後の、マーカを含む対象の画像領域の一実施形態を示している。
【図10B】中央値フィルタの使用後の、マーカを含まない対象の画像領域の一実施形態を示している。
【図11A】低閾値での接続構成要素解析後の、マーカを含む対象の画像領域の一実施形態を示している。
【図11B】低閾値での接続構成要素解析後の、マーカを含まない対象の画像領域の一実施形態を示している。
【図12A】図11Aの画像に使用されたものより高い閾値での接続構成要素解析後の、マーカを含む対象の画像領域を示している。
【図12B】図11Bの画像に使用されたものより高い閾値での接続構成要素解析後の、マーカを含まない対象の画像領域を示している。
【図13】様々な位置特定パラメータ間の関係を示す表である。
【図14】CTセットを使って,さまざまなビュー角度から生み出されたデジタル再生放射線写真を使って、マーカの位置を特定する代替の実施形態を示している。
【図15】画像化されたマーカの3D座標を図式的に表示する一実施形態を示している。
【技術分野】
【0001】
本発明は、医療装置及び手順の分野に関するものであり、特に、体内のターゲットの一特定に関するものである。
【背景技術】
【0002】
放射線治療は、悪性腫瘍のような人(又は動物)体のターゲットボリュームに、選択的に大量の放射線を照射する医療手順を含む。放射線治療の意図は、有害な組織を破壊するように、ターゲットとされる生物学組織に放射線を照射することである。周囲の体組織への損傷を最小にするために、多くの従来の治療方法は、「照射線量細分化」を利用して、各々が予定された全放射線量の一部のみを運ぶように、予定された一連の治療活動において、放射線の適用量を運ぶ。健康な体組織は、典型的には、照射した放射線によって生じた損傷から回復する、より大きい能力を持つ。多くの治療活動にわたって、運ばれる放射線を分散させることは、健康な組織に、放射線の損傷から回復する機会を与え、従って、充分な放射線照射を維持して、腫瘍を破壊すると同時に、健康な組織への永続的な損傷の量を減らす。
【0003】
日々の配置の変動、及び様々な形式の臓器運動は、治療ビームに対するターゲットの位置の不安定性に寄与するということが、知られている。電子ポータル画像装置の画質は、現在、ただ単に正確な患者の配置、及び患者の位置監視の目的のために、ビーム配信の前又は間に、それらの電子ポータル画像を使用して一又はそれ以上の低照射線量の画像を作り出すことができる程度である。
【0004】
従来の2D X線投影画像は、骨の構造のような堅い組織の視覚化を可能にする。しかしながら、放射線治療の多くの柔らかい組織のターゲットは、そのような画像において視覚化することは、困難又は不可能である。例としては、診断用画質の2D X線画像においてさえも見ることのできない前立腺の境界である。それゆえ、キロボルト(KV)及びメガボルト(MV)の両方の2D画像化線形加速器は、患者の配置において、通常、骨構造に依るものであり、従って、前立腺のような柔らかい組織のターゲットが、その骨構造に対して移動する時、その不正確な配置という結果になる。
【0005】
例えば、輝度変調放射線手術(IMRS)のターゲットとしての背骨(椎体)のような、幾つかの骨構造のターゲットにおいてさえも、そのターゲットの位置に加えて、ターゲットの配向も正確に知ることが必要とされる。しかしながら、これらのターゲットの一般的には丸い境界のため、2D X線立体画像のペアに基づく三角測量を使って、それらの格好を正確に推定することは困難である。
【0006】
一つの提案される解決策は、放射線治療室におけるコンピュータ断層撮影(CT)三次元X線画像化の使用である。例としては、オンボード画像化(OBI)又はポータル画像化を使ったレール上CT、及び円錐ビームCTである。幾つかの柔らかい組織のターゲットの境界は、CTスライスでよりよく見える。ターゲットボリューム全体にわたるスライスの集合で、それらの外形を描くことができ、従って、CT画像の治療計画において行われたのと殆ど同じ方法で、3Dでターゲットの輪郭を描くことができる。臨床的に有効であるために、オンライン画像作成様式としての室内CTは、高速立体画像再構成、及び高速CT類似輪郭能力の両方を必要とする。たとえ、高速かつ高信頼の3D類似輪郭が利用可能になったとしても、室内CT設備は追加コストを必要とし、レール上CTの場合、幾つかの診療所におけるスペース要求を抑える。
【0007】
(本発明の実施形態の要約)
本発明は、生体内マーカの画像化のための方法及び装置に関係するものである。一実施形態では、本方法は、第一の画像化様式で、体内に常駐する複数のマーカを画像化することを含むことができる。本方法はまた、第一のビームアイソセンタに対する、その複数のマーカの第一の座標を特定することも含むであろう。本方法はまた、第二の画像化様式で、その複数のマーカを画像化すること、及び第二のビームアイソセンタに対する、その複数のマーカの第二の座標を特定することも含むであろう。
【0008】
本発明の更なる特徴及び利点は、添付図面、及び、以下に続く詳細な説明より明らかであろう。
【0009】
添付図面の図において、本発明を、限定としてではなく、例として図示する。
【0010】
(詳細な説明)
以下の説明では、本発明の完全な理解を提供するために、具体的なシステム、構成要素、方法等の例のような、非常に多くの具体的な詳細が示されている。しかしながら、本発明を実践するのに、これらの具体的な詳細を用いる必要はないということが、当業者には明らかであろう。他の例では、本発明を不必要に不明瞭にするのを避けるために、よく知られた構成要素、又は方法は、詳細に説明していない。
【0011】
本発明は、様々なステップを含み、それらを以下で説明する。本発明のステップは、ハードウェア構成要素によって実施することができる、或いはマシン実行可能な命令で具体化することができ、それらを使用して、汎用又は専用のプロセッサに、その命令でプログラムされたステップを実施させることができる。そのかわりに、ハードウェア及びソフトウェアの組み合わせによって、ステップを実施することもできる。
【0012】
本発明は、コンピュータプログラム製品、又はソフトウェアとして提供することができ、それらは、命令を格納したマシン読み取り可能な媒体を含むことができ、それらを使って、本発明により処理を実施するようにコンピュータシステム(又は、他の電子デバイス)をプログラムすることができる。マシン読み取り可能な媒体は、マシン(例えば、コンピュータ)によって読み取り可能な形(例えば、ソフトウェア、処理アプリケーション)で情報を格納、又は送信するための如何なる機構も含む。マシン読み取り可能な媒体は、磁気ストレージ媒体(例えば、フロッピーディスク)、光学ストレージ媒体(例えば、CD−ROM)、光磁気ストレージ媒体、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、消去可能なプログラム可能メモリ(例えば、EPROM,及びEEPROM)、フラッシュメモリ、電気、光、音響、又は他の形の伝播信号(例えば、搬送波、赤外線信号、デジタル信号等)、又は電子命令を格納するのに適した他の形式の媒体を含むことができるが、それらに限定されない。
【0013】
本発明はまた、一以上のコンピュータシステムによって、マシン読み取り可能な媒体を格納、及び/又は実行する分散コンピューティング環境で実践することもできる。さらに、コンピュータシステム間で転送される情報を、遠隔診断又は監視システムにおけるようなコンピュータシステムを接続する通信媒体をまたがって、プル、又はプッシュのいずれかすることができる。遠隔診断又は監視において、ユーザは、本発明を利用して、ユーザと患者との間の物理的な隔離の存在にも関わらず、患者を診断又は監視することができる。
【0014】
生体内マーカを使った、センサ装置、及び/又はターゲットの体内での位置特定のための方法、及び装置について論じている。一実施形態では、ターゲットは解剖学的標識とすることができ、マーカはマーカ種とすることができる。ターゲットボリュームにおいて、体内に、マーカを埋め込むことができる。(例えば、計画過程の一部として)例えば、治療を計画するために使用されるCTデータセット、シミュレータからの放射線透過画像、又は初日の治療での放射線透過画像のような画像化手法を使って、治療アイソセンタに対して、(例えば、放射線不透過の)マーカを位置特定することができる。位置特定されたマーカは、3D基準位置として働く。次に、後続の治療活動では、その後続の活動で得られた(例えば、X線)画像を使って,再びマーカを位置特定することができる。前に得られた画像と同じ画像化様式、或いは異なる画像化様式を使ってマーカを画像化することができる場合にはその異なる画像化様式、のいずれかを使って、後続の画像を得ることができる。
【0015】
マーカの位置を、それらの基準位置と比較することにより、患者の位置及び配向(及び/又は、治療ビームの方向及び形状)について必要な如何なる調整も特定することができる。治療ビームに対するターゲットの形状が、計画された形状にできるだけ近いように、その調整を特定することができる。
【0016】
一実施形態では、ターゲットは、センサ装置とすることができる。以下の解説は、センサ装置に関するものとすることができるが、そのセンサ装置はまた、応答器又はトランスポンダのような遠隔測定能力を持つこともできる。一実施形態では、説明する方法及び装置は、体内で一又はそれ以上のセンサ装置(例えば、センサ、応答器、トランスポンダ等)を位置特定する手段を提供する。センサ装置は、例えば、注入による埋め込みのような様々な手段によって、体内に置くことができる。その位置は、例えば、腫瘍の隣、通常の組織、又は対象の如何なる他の領域、ともすることができる。例えば、放射線不透過性,超音波、磁気、又は画像化することのできる他の特性、を測定する画像化手法によって、装置を識別することができる。装置の画像化可能特性は、その構成内で一体化しているとすることができる、或いはそれを画像化可能にするために、装置に付加することができる。一実施形態では、装置は、画像化可能なマーカのアレイ又は集合体の一部として、体内に置くことができる。画像化可能なマーカの一又はそれ以上はまた、センサ装置とすることもできる。
【0017】
装置は、例えば、放射線量、温度、pH、代謝、酸素化のような様々な生理学的パラメータの一又はそれ以上を検出する、一又はそれ以上のセンサ要素を含むことができる。一実施形態では、装置は、例えば遠隔計測技術によって、そのような測定値を記録、及び/又は伝送することができる。同様に、装置は、外部信号(例えば、電気、光、超音波、磁気)に応答することができる、或いは、測定されている内部受信信号に応答するようにプログラムされることができる。センサ装置内のセンサ要素の各々の位置を、以下でさらに詳細に解説する一又はそれ以上のマーカに対して、特定することができる。
【0018】
一実施形態では、例えば、装置内に封入された治療薬の放出によって、信号に応答するように、装置を構成することができる。例えば、装置は、外部信号に応答して、「作動状態」になって、体内に注入、或いは別の方法で埋め込まれた他の小さい容器に封じ込められた治療薬、又は診断薬の放出をもたらす第二の局所信号を作り出すことができる。
【0019】
画像処理ソフトウェアを使って、センサ装置を位置特定することができる。一実施形態では、この過程は、様々な視点から取られた画像の解析を含むであろう。画像化される装置の体内での位置は、マーカのアレイと結び付けられることができ、そしてまた、そのマーカのアレイは、画像化方法によって表示される様々な解剖学的位置と結び付けられることができる。従って、センサ装置の位置は、解剖学的標識に対して既知とすることができる。センサ装置が置かれている体の部分の運動によって生じたセンサ装置の移動もまた、積分時間にわたるセンサ装置の位置が直接分かる、或いは数学的にモデル化され、予測できるように、測定することができる。
【0020】
一実施形態では、センサ装置の配向もまた、複数のマーカ、又は複数の画像化特性の使用によって特定することができる。例えば、マーカを、装置上の様々な位置に、或いは装置上に異なるパターンで配置することができる。センサ装置のケースの異なる部分は、異なる画像化特性を持つように製造することができる。体内に幾つかのセンサ装置が置かれている場合には、それらは、各々、異なる画像化マーカ、又は異なる画像化特性を持つことができ、それによって、具体的な装置の位置、ならびに装置の配向を特定することを可能にする。
【0021】
図1Aは、センサ装置、及び複数のマーカ(例えば、マーカ種)を有する患者の体内の前立腺領域の拡大画像を示している。センサ装置100、及びマーカ110は、体内(105)の対象の領域に、又はその近くに置かれる。一実施形態では、図1Aに示すように、センサ装置100を、マーカ種のアレイ110で定められるボリューム内に置くことができる。代替の実施形態では、センサ装置100を、マーカのアレイ110で定められるボリュームの外に置くことができる。
【0022】
例えば、図1Aに示すように、対象の領域は、腫瘍細胞集団を持つ前立腺を包含する体内105のターゲットボリュームとすることができる。マーカのアレイ110は、センサ装置100がマーカのアレイ110で定められるボリューム内に置かれた前立腺の近くに、埋め込むことができる。センサ装置100を、前立腺内に置いて、受信された治療用放射線の照射線量を測定することができる。従来の画像化手法は、センサ装置を位置特定することができるが、体内105における、特に他の解剖学的標識に対する、センサ装置の正確な位置を知ることが望ましいであろう。例えば、センサ装置100を前立腺内に埋め込んで、前立腺の腫瘍に配信された放射線の照射線量を監視する場合には、他の解剖学的標識(例えば、直腸壁)に配信された放射線を推定、さもなければ特定し、後続の放射線治療によるそのような領域への損傷を最小限に抑えるために、これらの他の解剖学的標識へのその装置の近さを知ることが望ましいであろう。
【0023】
図1A及び1Bは、解説を容易にするだけのために前立腺領域を示しており、本発明は、前立腺領域のみで使用することに限定されないことに、注意すべきである。代替の実施形態では、対象の領域は、他の臓器(例えば、肝臓、又は肺)、腫瘍、正常な組織等のような、体内の如何なる他の領域も含むことができる。
【0024】
センサ装置100は、例えば、放射線照射線量、温度、pH、代謝、酸素化のような様々な生理学的パラメータの一又はそれ以上を検出することができる。上記の例を継続しながら、センサ装置100を使用して、前立腺の腫瘍細胞に配信された放射線の照射線量を監視することができる。一実施形態では、センサ装置100は、例えば遠隔計測技術によって、そのような測定値を記録、及び/又は送信することができる。センサ、及び遠隔計測技術は、この技術分野では既知であり、従って、詳細な解説を提供しない。
【0025】
センサ装置100は、外部信号(例えば、電気、光、超音波、磁気)に応答することができる、或いは、測定されている内部受信信号に応答するようにプログラムされることができる。一実施形態では、センサ装置100を、信号に応答して、例えば、センサ装置100に封入された治療薬(例えば、前立腺腫瘍のための化学療法)を放出するように、構成することができる。他の実施形態における他の例では、センサ装置100は、外部信号に応答して、「作動状態」になって、体内105に注入、さもなければ埋め込まれた他の装置(示されていない)内に密封された治療又は診断薬の放出をもたらす第二の局所信号を作り出すこともできる。
【0026】
マーカ110は、以下に説明するように、画像化システムがそのマーカを検出できるように、ターゲット組織ボリュームに対して所定の位置にとどまることを意図されている。一実施形態では、例えば、センサ装置、及び/又はマーカ110を、生検注射器の針内に置くことができる。針は患者の体内に注入され、センサ装置、及び/又はマーカ種110が、針から体組織内へ放出される。そのかわりに、他の方法を使用して、外科手術のように、センサ装置及び/又はマーカ110を埋め込むこともできる。
【0027】
治療の間、例えば、短いx線照射を使用して、画像化の目的のための画像を形成することができる。そのような画像において、骨、及び気道のみは容易に識別でき、柔らかい組織の輪郭描写は限られる。しかしながら、図1Aに示された前立腺領域のようなターゲットボリューム内に置かれたマーカ110は、ターゲットのファクシミリとして働く。例えば、キロボルトのx線又はメガボルトのx線、超音波、或いはMRIのような幾つかの様式のうちの一つを使って、センサ装置100、及び/又はマーカ110を画像化することができる。一実施形態では、マーカ110を使用して、内部座標系を特定することができ、そのような内部座標系に対して、センサ装置100の位置を特定することができる。
【0028】
一実施形態では、マーカ110はマーカ種とすることができる。マーカ種は、ほぼ3.0から6.0ミリメートルの範囲の長さ、及びほぼ0.5から3.0ミリメートルの範囲の直径を持つ円筒形の形状とすることができる。代替の実施形態では、マーカ種は、他の形状(例えば、長方形、球形等)、及び他の直径を有することができる。マーカ110は、マーカ種のみに限定されないことに注意すべきである。そのかわりに、例えば、外科用クリップ、及び整形外科用ねじのような、画像化可能特性を持つ他の形式のマーカデバイスを、マーカ110として利用することができる。
【0029】
従来のマーカ種は、その高密度、大きい原子番号、及び生物学的適合性のため、例えば金及びプラチナのような様々な材料で作られていた。マーカ種は、典型的には、完全にイナクティブなので、それは、体に全く傷をつけない、あるいは患者に不快を生じさせない傾向がある。マーカ110は、患者に一度埋め込まれたら、ターゲットボリュームに対して移動しないことが望ましいであろう。一実施形態では、一又はそれ以上のマーカ110は、滑らかな表面を持つ完全な固形、或いはそのボリューム全体にわたって穴だらけ、とすることができる。そのかわりに、高密度材料、及び多孔性材料の組み合わせを持つマーカ110を使用して、組織の癒着とともに画像化検出性を促進することができる。
【0030】
そのかわりに、他の材料(例えば、タングステン、又はタンタル)、及び材料の組み合わせを、マーカ110に使用することもできる。例えば、MRI画像化を使用すべき場合には、マーカ110の材料を、特にMRI応用例で効果的であるように選択することができる。マーカ110は、磁界の摂動を最小限に抑えるように選択された材料から生成することができる。一つのそのような実施形態では、マーカ110を、反対符号の磁化率を持つ材料の組み合わせで作ることができる。反磁性体(例えば、金)を外部磁界に置いた時、それは、金属の内部から、磁界を排除する傾向がある。摂動されない磁界パターンと比べた時、より多数の磁力線が、金属を貫通するのではなく、金属のまわりを通過するように、磁力線をそらす。反対に、外部磁界内の常磁性体(例えば、プラチナ、及びタンタル)は、反磁性体と反対方向に磁界を摂動させ、それにより、常磁性体を通過する磁力線の数を増やすように磁力線をそらすであろう。
【0031】
一つの特定の実施形態では、マーカ110は、図1A及び1Bに示すように、(例えば、放射線不透過、音波、磁気、又は他の材料特性を測定する画像化手法による)二又はそれ以上の様式を使って、それらを画像化することができるような材料で構成される。図1Bは、第二の様式で画像化不可能なセンサ装置、及び第二の様式で画像化可能なマーカのアレイを示している。一実施形態では、図1Aの拡大画像190で示すように、第一の様式を使って、マーカ110.及びセンサ装置110の両方を画像化することができる。マーカ110のアレイの画像を使用して内部座標系を確立し、図6に関して以下で説明するように、その確立された内部座標系において、一又はそれ以上のマーカ110に対して、センサ装置100の位置を特定することができる。
【0032】
第二の様式では、マーカ110はまた、図1Bの拡大画像195で示すように画像化することができるが、しかしながら、第二の装置100は、図1Bの拡大画像195内にセンサ装置100がないことで示されるように、この第二の様式では画像化可能ではないとすることができる。そのような実施形態では、画像処理ソフトウェアを使って、第二の画像化様式でのマーカ種のアレイの位置を、第一の画像化様式でのそれらの位置と関連付けて、前に確立された座標系において、センサ装置100を特定することができる。第一の画像化様式で画像化されたセンサ装置100の体内105における位置を特定する。(拡大画像195で示される)第二の様式でのマーカ110のアレイの位置を、座標系において特定した時、次に、センサ装置100の位置を、内部座標系において(すなわち、一又はそれ以上のマーカ110に対して)計算し、図4に関して以下で説明するように、計算システムで表示することができる。定位の過程は、図6に関して、以下でより詳細に論じる。
【0033】
このように、たとえ図1Bの第二の様式195において、センサ装置100を画像化することができなくても、マーカのアレイ110に対して、体内105におけるセンサ装置100の位置を知ることができる。そして次に、これを、その画像化様式で見ることのできる様々な解剖学的標識と結びつけることができる。従って、また、解剖学的標識に対しても、センサ装置100の位置を知ることができる。例えば、センサ装置100が置かれた体の部分の運動によって生じたセンサ装置100の移動もまた、積分時間にわたる装置の位置を直接計算することができる、或いは数学的にモデル化し予測することができるように測定することができる。図6について以下で説明するように、3D位置 対 時間の追跡を実施することができる。一実施形態では、次に、例えば、引用により本出願に組み入れられる「放射線治療の予測生理学的ゲーティングのための方法及びシステム」という名称の係属中の米国特許出願第09/178,383号で説明するように、予測フィルタを使って,結果として生じるマーカの軌跡を処理することができる。そのかわりに、この技術分野で既知の他の予測フィルタを使用することもできる。
【0034】
例えば、呼吸、及び筋肉運動における通常の変動、又は疾患の進行(例えば、頭蓋内の膨張)によって生じる弾性構造(例えば、臓器)の変形のため、対象の体内領域の位置は常に変化する。そのようなものは、領域(例えば、臓器)が固定位置にとどまることを妨げ、治療用放射線を正確な点(例えば、腫瘍)に当てることをより困難にする。センサ装置100を、そのような体内105の歪む解剖学的領域に置いた場合には、外部の比較放射線源に対して、センサ装置100を、同じ固定位置で位置を特定することはできない。また、マーカ種のアレイ110もその歪む解剖学的領域に置いた場合には、そのセンサ装置100の位置をマーカ種のアレイ110と関連付けることにより、体内105でのセンサ装置100のより正確な位置を特定することができる。ターゲットボリューム(例えば、腫瘍)が充分な放射線を受け取ること、及びその周辺の隣接する非ターゲットボリューム(例えば、健康な組織)への損傷を最小限に抑えることを確実にするために、体内105のセンサ装置100の位置をより正確に知ることは、例えば特定の領域における放射線の測定、及び/又は配信を促すことができる。
【0035】
更なる実施形態では、センサ装置100を用いて、或いは用いないでのいずれかで、マーカのアレイ110を使用して、マーカのアレイであって、おそらく解剖学的標識ではない110を直接画像化することのできるシステムを使って、解剖学的標識の位置を特定することができる。そのような実施形態では、解剖学的標識(例えば、骨,臓器、又は他の体の構造)を、第一の画像化様式、及びその第一の画像化様式でまた画像化可能なマーカのアレイ110に対するその体内105における位置を用いて、画像化する。画像化システムは、マーカ種のアレイ110に基づいて内部座標系を生成し、その座標系において、解剖学的標識の位置を特定する。例えば、超音波画像化システムを使用する場合には、その画像化システムは、超音波手法を使って,解剖学的標識の位置、及びマーカ110の位置を検出することができる。検出されたマーカを使って、内部座標系を計算することができる。マーカ110の位置に基づいて、内部座標系に対して(例えば、マーカのうちの少なくとも1つに対して)、解剖学的標識の正確な位置を計算することができる。
【0036】
次に続く活動において、マーカのアレイ110は、第二の画像化様式195で画像化可能であるが、解剖学的標識は不可能であろう。しかしながら、たとえ第二の様式で、解剖学的標識を画像化することができなかったとしても、その解剖学的標識の位置は、前に特定されたマーカ110との位置関係により、なおもその座標系において特定することができる。このように、マーカ110は、図1Bの第二の様式195で画像化可能であるので、確立された内部座標系に基づいて、解剖学的標識の位置を特定することができる。
【0037】
図2Aは、そのケース上に一またはそれ以上のマーカが配置されたセンサ装置の実施形態を示している。この実施形態では、センサ装置100は、そのセンサ装置のケースに結合された複数のマーカ200を含む。図示を容易にするだけのため、4つのマーカを持つようにセンサ装置を示している。代替の実施形態では、センサ装置100は、4以上又は以下のマーカ200を持つ、或いは全くマーカを持たないであろう。図2Aは、センサ装置100の全長103に沿って配置されたマーカ200を示しているが、マーカ200は、センサ装置100上に如何なる形状でも配置することができる。一実施形態では、全長103は、例えば、26ミリメートル以下とすることができる。そのかわりに、センサ装置100は、他の長さを持つこともできる。他の実施形態では、図2Bに示すように、マーカ200を、センサ装置200内に配置することもできる。
【0038】
一つの特定の実施形態では、例えば、マーカ種200は、円筒形の形状であり、ほぼ3.0〜6.0ミリメートルの範囲の長さ、及びほぼ0.5〜3.0ミリメートルの範囲の直径を持つことができる。代替の実施形態では、マーカ種200は、他の形状(例えば、長方形、球形等)、及び他の寸法を持つことができる。
【0039】
センサ装置100は、一度、患者内に埋め込まれると、ターゲットボリュームに対して移動しないことが望ましい。一実施形態では、一又はそれ以上のマーカ200は、滑らかな表面を持つ完全な固形、或いはそのボリューム全体にわたって穴だらけであるとすることができる。そのかわりに、一又はそれ以上のマーカ200は、それを使用して、組織の癒着とともに画像化検出性を促進することのできる、高密度材料及び多孔性材料の組み合わせを持つこともできる。
【0040】
そのかわりに、マーカ200について、他の材料(例えば、タングステン、又はタンタル)及び材料の組み合わせを使用することもできる。例えば、MRI画像化を使用する場合には、マーカ200の材料を、MRI応用例で特に効果的であるように選択することができる。マーカ200は、磁界の摂動を最小限に抑えるように選択された材料から生成することができる。一つのそのような実施形態では、図1Aのマーカ110に関して上で説明したように、逆の符号の磁化率を持つ材料の組み合わせで、マーカを作ることができる。
【0041】
図3は、複数の画像化特性を持つケースを有するセンサ装置の一実施形態を示している。一実施形態では、例えば、センサ装置100のケースの異なる部分(例えば、310及び320)を、異なる画像化特性を持つように製造することができる。
【0042】
前で述べたように、マーカ200及び/又は画像化特性を、センサ装置100上の様々な位置に、或いはセンサ装置100上に様々なパターンで配置することができる。このように、センサ装置100の配向を、図2A、2Bの複数のマーカ、又は図3の複数の画像化特性の領域(例えば、310及び320)の使用を通して特定することができる。幾つかのセンサ装置100を体内105に置いた場合には、その上/その中に配置された複数の画像化マーカ、又はセンサ装置の構成(例えば、そのケースの部分)に一体化された複数の画像化特性の手段を通してというように、それらは各々、異なるマーカ特性を持つことができ、それによって、具体的な装置の位置、ならびに装置の配向を特定することを可能にする。
【0043】
図4に示すような画像システムによって、一又はそれ以上のセンサ装置100、又はマーカ110の位置を突き止めることができる。図4は、治療計画及び/又は配信システムを表すシステム400の一実施形態を示している。処理計画システムについて時々説明する一方で、システム400はまた、治療配信システムも表している。このように、ビーム402は、解説の状況によって、画像化ビーム、及び治療用ビームの両方を表すことができる。計画システム、及び治療システムは、物理的に異なる機械、或いは機械内に一緒に組み込まれている、とすることができる。例えば一実施形態では、配信システムは、例えば、カリフォルニアのVarian Medical Systems Inc.から市販されているClinac(登録商標)線形加速器、及び多葉コリメータ(MLCTM)とすることができる。示されたシステムの構成400は、説明及び図示を容易にする目的のためだけのものであり、この技術分野で既知の様々な他の構成も使用することができ、例えば、画像装置405を、処理用テーブル404内に組み込むのではなく、ガントリ上に置くこともできる。説明を容易にするだけのために、特定の画像化様式について、画像化システム400を説明することができ、上で言及したように、他の画像化様式も使用することができることもにもまた、注意すべきである。
【0044】
治療用テーブル404、及び画像化装置405によってサポートされる人体105を、図4に示している。画像化光源(例えば、キロボルトx線、メガボルトx線、超音波、MRI等)406を、例えばガントリ408内に置くことができ、画像化装置405を、例えば画像化光源406と逆側の人体105の下に置くことができる。画像化装置405は、画像化光源406によって生成されたビーム402を検出、及び受信できるように置かれる。画像化装置405の出力画像は、コンピュータ510へ送信される。
【0045】
コンピュータ510は、少なくとも1つのマーカ110、センサ装置100、及び/又は解剖学的標識の画像を含む、画像化装置406の出力画像を受信する。画像化装置406から受信された画像を、コンピュータ510で使用して、マーカ110の座標系を創り出す。第一の画像化様式を使った第一の治療活動において、マーカ種110、及びセンサ装置100(及び/又は解剖学的標識)を検出し、マーカ110の各々の座標を特定し、コンピュータ510内に格納する。その後、次の活動において、異なる画像化様式を使って、システム400は、マーカ100を検出し、コンピュータ510内の格納されたデータとの比較により、座標系において、それらの位置を特定することができる。次に、第二の様式で画像化可能でないセンサ装置110及び/又は解剖学的標識の位置を、上で説明したように、前に確立された座標系を使うことによって、コンピュータシステム510により特定することができる。
【0046】
図5は、ワークステーション、パーソナルコンピュータ、ラップトップコンピュータ、ハンドヘルドコンピュータ、携帯型情報端末(PDA)、閉回路監視ボックス等の例を表す、図4のデジタル処理システム510の一実施形態を示しており、そこに、本発明の機能を実装することができる。
【0047】
デジタル処理システム510は、デジタル処理システムの構成部品間でデータを転送するためのバス、又は他の手段1001を含む。デジタル処理システム510はまた、情報を処理するための、バス1001と結合されたプロセッサ1002のような処理手段を含む。プロセッサ1002は、一又はそれ以上の汎用プロセッサ(例えば、モトローラ パワーPC プロセッサ、及びインテル ペンティアム プロセッサ)、又はデジタル信号プロセッサ(DSP)(例えば、テキサス インストゥルメンツ DSP)のような専用プロセッサを表すことができる。プロセッサ1002は、本出願で説明する操作及びステップを実施するための命令を実行するように、構成することができる。例えば、プロセッサ1002は、命令を実行して、そのプロセッサに血管介入場所を追跡させるように構成することができる。
【0048】
デジタル処理システム510は、さらに、プロセッサ1002により実行される情報及び命令を格納するための、バス1001に結合される、ランダムアクセスメモリ(RAM)、又は他の動的ストレージデバイスを含み得るシステムメモリ1004を含む。システムメモリ1004はまた、プロセッサ1002による命令の実行の間、一時的な変数、又は他の中間情報を格納するために使用することができる。システムメモリ1004はまた、プロセッサ1002のための静的な情報及び命令を格納するための、バス1001に結合された読み出し専用メモリ(ROM)、及び/又は他の静的なストレージデバイスを含むこともできる。
【0049】
ストレージデバイス1007は、情報、及び命令を格納するための、バス1001に結合された一又はそれ以上のストレージデバイス(例えば、磁気ディスクドライブ、又は光ディスクドライブ)を表している。本出願で説明したステップを実施するための命令を格納するために、ストレージデバイス1007を使用することもできる。
【0050】
一実施形態では、またデジタル処理システム510を、ブラウン管(CRT)又は液晶ディスプレイ(LCD)のような、情報をユーザに表示するための表示装置1021に、バス1001を介して結合することができる。このような情報は、図4の画像450に示されるような座標系、マーカ、センサ装置、及び/又は解剖学的標識のような図形、及び/又はテキストの描写を含むであろう。情報、及び/又はコマンド選択をプロセッサ1022へ伝達するために、ライトペンのような入力装置1022を、バス1001に結合することができる。更なる形式のユーザ入力装置は、マウス、トラックボール、又はカーソル方向キーのような、方向情報及びコマンド選択をプロセッサ1002へ伝達し、ディスプレイ1021上のカーソル移動を制御するためのカーソル制御1023である。
【0051】
また、通信デバイス1026(例えば、モデム、又はネットワークインターフェースカード)を、バス1001に結合することもできる。例えば、通信デバイス1026は、イーサネットカード、トークンリングカード、或いは、遠隔診断、又は監視システムのような、デジタル処理システム510が接続を確立しているネットワークへの通信リンクを提供するための他の形式のインターフェース、とすることができる。
【0052】
デジタル処理システム510は、多くの異なる構成及びアーキテクチャを持ち得り、かつ本発明で用いることのできるシステムのたった1つの例を表している、ということがわかるであろう。例えば、幾つかのシステムは、しばしば、周辺バス、専用キャッシュバス等のような複数のバスを持つ。
【0053】
図6は、標識の位置を突き止める方法の一実施形態を示している。治療計画段階において、マーカ110(及び、望まれる場合には、一又はそれ以上のセンサ装置100)を、図4のターゲットボリュームB403内に埋め込む、ステップ610。図1A及び1Bに関して上で説明した手法で、埋め込みを実施することができる。典型的には、腫瘍の放射線治療計画プロセスの一部として、放射線ビーム内で、体、従って腫瘍を正確に配置するために、患者を治療するために使用される(既知のサイズ及び形状を持つ)治療用ビームのアイソセンタを、(例えば、医師によって)特定する。例えば、治療計画の間、ターゲットボリューム403を通る、体105の一連のCTスライスを取ることができる。医者は、(例えば、2D又は3Dのいずれかで表される)CTスライスで腫瘍を見て、一又はそれ以上のCTスライスのコンピュータ501のディスプレイ上で、治療ボリューム403の境界を定めることができる。この技術分野で既知の治療計画ソフトウェアを使って、定められた境界に基づいてアイソセンタ401を計算することができる。一実施形態では、例えば、カリフォルニアのVarian Medical Systemsから市販されているEclipseTM治療計画ソフトウェアを使用することができる。そのかわりに、他の治療計画ソフトウェアを使用することもできる。そのような正確な配置は、周辺の正常な組織への放射線の照射量を最小限に抑えると同時に、腫瘍に配信される治療用放射線の照射量を最大化する。
【0054】
一実施形態では、治療計画プロセスの一部として、治療用機械ビーム402のアイソセンタ401(従って、ターゲットボリューム403)に対して、埋め込まれたマーカ110の3D座標の位置を特定することができる。例えば、ターゲットボリューム403を通る、体105の一連のCTスライスを使って、第一の画像化様式で、マーカ110を画像化することができる、ステップ620。CTは、体105を通って投影されたスライスで、ボリューム要素(ボクセル)あたりの平均x線吸収を測定する。この技術分野で既知の自動化、又はユーザ支援手法を使って、(例えば、コンピュータシステム510を使って)CTスライスでマーカ110を特定することができる計画用CTセット。そのかわりに、他の画像化様式で、また他の時間(例えば、治療計画活動の前又は後)において、マーカ110の定位を実施することができる。マーカ110の3D基準座標の特定のために、第一の様式の画像を、コンピュータシステム(例えば、コンピュータシステム510)に移入することができる。
【0055】
ステップ620からの情報を使い、治療用ビームのアイソセンタ401が既知であると仮定すると、そのアイソセンタ401に対する各マーカ110の3D基準座標を、その技術分野で既知であるソフトウェア手法を使って特定することができる、ステップ630。マーカの位置特定を、治療計画より前(従って、アイソセンタ401が知られる前)に実施する実施形態では、マーカのボクセル座標を(例えば、コンピュータシステム510に)格納し、アイソセンタ401が特定されると、そのボクセル座標を、そのアイソセンタ401に対する基準座標に変換することができる。例えば、一実施形態において図15に示されるようなグラフィカルユーザインターフェースを使って、基準マーカの座標をユーザに表示することができる。この実施形態では、アイソセンタ401に対する各マーカの3D基準座標(x、y、z)は、マーカがガントリ408からより離れるとき増大する正のx値、ガントリ408から見てマーカが左へ離れるとき増大する正のy値、マーカがガントリ408から下方向により離れるとき増大する正のz値で、特定される。そのかわりに、座標について、他の位置関係を使用することもできる。
【0056】
他の方法を使用して、マーカ110の位置を特定することができることに、注意すべきである。更なる実施形態では、例えば、図14に示すように、CTセットを使って様々な視野角から作り出されたデジタル再生放射線透過写真(DRR)を使って、この技術分野において既知の三角測量手法によって、マーカの位置を特定することができる。図14は、例えば、視野角Aに対して、第一の視野角1410、及び第二の視野角1420が270°をなしていることを示している。図14のDRRは、マーカのフィールド形状(例えば、フィールド形状1430)を含むことができる。また更なる実施形態では、グラフィカルユーザインターフェースを通したそのような座標入力、又はマーク付けの手法を使って、マーカ110の位置を、システムのユーザによって、手動で入力することができる。
【0057】
前に言及したように、毎日の治療用機械のセットアップの変動、及び治療計画活動において生じた様々な形式の臓器運動は、特定の治療活動の間の、治療用機械ビーム402のアイソセンタ401に対するターゲットボリューム403の位置の不確定さに寄与する。如何なるそのような位置の片寄りも最小限に抑えるために、マーカ110を使用して、ターゲットボリューム403を、治療用ビーム402とよりぴったりと一線上に揃える。ステップ630において、計画のアイソセンタ401に対する各マーカ110の3D基準座標を特定したので、治療活動の間、マーカ110が画像化可能である場合には、治療時における既知のビームアイソセンタに対するマーカ110の位置の如何なるオフセットも、特定し、調整することができる。
【0058】
特定の治療活動において、これを実現するために、マーカ110を第二の様式で画像化する、ステップ640。第二の様式は、第一の様式と同じとすることもできる。そのかわりに、ステップ640において画像を獲得するために使用される第二の画像化様式は、第一の画像化様式とは異なるものとすることもできる。一実施形態では、第二の様式の画像は、例えばMVポータル画像装置、及び/又はKV画像装置を使って獲得されるX線画像とすることができる。画像装置405の基準座標は、治療用機械のアイソセンタ401に対して較正される、と仮定する。
【0059】
ステップ650では、第二の様式の画像(例えば、X線)内のマーカ110(例えば、放射線不透過)を特定する。第二の様式の画像は、マーカとみなされ得るマーカでないオブジェクト、又は画像(偽マーカ)を含み得る、ということに注意すべきである。一実施形態では、図7に関して解説するように、誤って検出されたマーカを、識別されたマーカのセットから取り除くことができる。
【0060】
ステップ660では、獲得された画像の既知の形状に基づいて、マーカを3Dから2D画像領域の投影した後、ステップ650の第二の様式の画像内で識別された各マーカ110を、ステップ620において特定されるようなその3D基準位置と互いに関連付けられる。一実施形態では、ステップ650において識別されたマーカ110は、図7に関して以下で解説する一貫性試験を通過したマーカである。もう1つの選択肢として、一貫性試験を用いる必要はない、或いは他の形式の選別を実施して、識別されたマーカのセットに到達することもできる。
【0061】
識別されたマーカ110の2D座標を使って、治療用機械のアイソセンタ401に対する、そのマーカのセットの位置、及び配向を見つける、ステップ660。一実施形態では、治療用機械のアイソセンタ401に対するマーカ110の位置及び配向を、二又はそれ以上の画像から、三角測量によって特定することができる。例えば、様々な位置においてとられた一又はそれ以上の画像からのデータを混ぜ合わせることにより、治療ボリューム403の立体表示を得ることができる。治療用カウチ404は、治療用機械400における操作半径内に、患者、従って治療ボリューム403を配置することができる。単一のガントリ408の位置において、或いはガントリの回転によって、様々な半径方向の位置において、複数の単一画像を生成することができ、任意の2つの画像を選択して、コンピュータ510によって、治療ボリュームの立体表示に合成することができる。立体表示を生成して、選択された半径方向位置における2D断面データを提供することができる。立体表示を使用して、既知の治療ビームのアイソセンタ410に対するマーカ110の3D座標を特定することができる。そのかわりに、他の三角測量手法を用いることもできる。三角測量手法は、この技術分野では既知であり、従って、詳細な説明は提供しない。
【0062】
更なる例として、代替の実施形態では、引用により本出願に組み入れられる係属中の米国特許出願10/234,658号で説明するように、ステップ630の基準マーカ座標によって定められる堅い構造の単一の表示位置、及び配向の推定を使って、治療用機械のアイソセンタ401に対するマーカ110の位置、及び配向を特定することができる。前者の実施形態の方法は、前立腺、又は肝臓のような、より堅くないターゲットにより適しているであろう。後者の実施形態の方法は、骨組織のような密に堅いターゲットに対して効果的であろう。そのかわりに、さらに他の方法を使用して、マーカのセットの位置及び配向を特定することもできる。
【0063】
検出されたマーカについて、各マーカ110の3D座標を、その対応する3D基準座標(例えば、図8Aの3D基準座標の位置810)と比較して、2つのデータセット間のオフセットを(例えば、デルタx,y,z値の形で)特定する、ステップ670。理論的には、患者の体105を完璧に配置した場合には、2つのデータセット間に全くオフセットがない、すなわちマーカ110のはずである。しかしながら、実際には、図8Aに示すように、2つのセット間には、いくらかのオフセット(例えば、オフセット815)が存在するであろう。
【0064】
ステップ650において、埋め込まれたマーカ110の幾つかを画像化、又は識別できることにもまた注意すべきである。ステップ650において識別されなかったマーカの位置を、ステップ620で得られた基準マーカ位置間の位置関係に基づいて特定することができる。一実施形態では、剛体変換は、基準マーカセットに適用される時、識別されたマーカ110の3D座標間の平均二乗誤差を最小にすると推定されるであろう。ステップ650の第二の画像化様式で検出されなかったマーカを含む基準マーカセットに剛体変換を適用した時、その第二の画像化様式で検出されなかったマーカの推定位置を得ることができる。一実施形態では、例えば、検出されなかったマーカは、実際には、図1Bの第二の様式195、又は図6のステップ640で画像化可能でない(マーカ特性を持つ、或いは持たない)センサ100ということもある。代替の実施形態では、例えば、検出されなかったマーカは、実際には、マーカの1つではなく、解剖学的標識ということもある。
【0065】
ステップ680では、基準マーカセットと治療活動のマーカセットとの間のオフセット位置、及び配向の差異に基づいて、ターゲットボリューム403についての治療形状と計画形状との間の最も良い一致を実現するために、患者のセットアップに対して必要な調整(例えば、カウチ404の位置、及び/又は配向)、及び/又は治療ビーム402に対して必要な調整(例えば、ガントリ408の角度、コリメータの回転角等)を推定することができる。他の手法でもオフセット情報を特定できることに、注意すべきである。代替の実施形態では、例えば、基準マーカセット、及び治療活動の検出されたマーカセットの両方の質量の中心(重心)を計算、及び比較して、その2つの間の位置オフセットを特定することができる。
【0066】
図7は、画像内でマーカを検出し、偽マーカを取り除く一実施形態を示している。この実施形態では、ステップ650において誤って検出されたマーカを、識別されたマーカのセットから取り除くことができる。ステップ660に関して上で説明したように、得られた画像の既知の形状に基づいてマーカ110を投影した後、画像711、及びその画像における対象の領域(ROI)712を、2Dサイズ及び形状の整合性試験に提供する、ステップ720。2Dサイズ及び形状の整合性試験を実施して、画像内のマーカを識別する。一実施形態では、中央値フィルタ、及び/又は接続構成要素解析を利用した自動検出アルゴリズムを使って、2Dサイズ及び形状の整合性試験を実施することができる。
【0067】
図9は、マーカを含む画像の中央値フィルタリングの一実施形態を示している。中央値フィルタ905を使用して、画像の画素の輝度値をフィルタリングして、特定の画像画素がマーカ(又は、他の画像化可能なオブジェクト)の一部、或いは背景ノイズを含むかどうか特定することができる。
【0068】
この実施形態では、画像内の特定の数の画素(例えば、画素901、画素I、等)について、その中心画素(例えば、画素I)のまわりの(特定の近似半径を有する)ほぼ円形又は「リング状」の特定の数の周辺画素(例えば、P1,P2,PN等)を、中央値フィルタが推定する。中央値フィルタ905は、周辺画素(例えば、画素P1,P2等)の中央輝度値をとり、その中央値を推定された中心画素から引いて、フィルタリングされた画素輝度値 画素0を出力する。画素0を使用して、以下の図10−12に示すように、フィルタ画像を生成する。中央値フィルタ905の効果は、画像の背景輝度ノイズを取り除いて、以下の図10A及び10Bで示すような、マーカ110と元々の画像背景との間のよりよく目に見える区別を有するフィルタ画像を作りだすことである。
【0069】
特定の一実施形態では、例えば、N=16である(すなわち、リング状の中央値フィルタが16個の周辺画素を推定する)。マーカ幅915の半分より大きくなるように、半径910を選択する。特定の一実施形態では、例えば、画素の既知のサイズ、及び埋め込まれたマーカ110の既知のサイズに基づいて、ほぼ10画素となるように、円の半径910を選択する。他の実施形態では、リングの直径(2×半径910)を、マーカ幅915の幅のほぼ2.6倍となるように選択し、それは画素901のサイズとは無関係である。これは、リングがマーカ110と交差している時でさえも、中央値統計データが背景(マーカでない)画素の中央値を表すようにさせる。
【0070】
そのかわりに、他の評価領域の周辺形状(例えば、楕円、長方形、正方形等)、寸法、画像内で推定された画素の数、周辺画素の数等を使用することもできる。代替の実施形態では、他のフィルタリング(例えば、平均値フィルタリング)、及びこの技術分野で既知の背景減算手法を使用することもできる。
【0071】
図10A及び10Bは、それぞれ、2Dサイズ及び形状整合性試験720における中央値フィルタ905の使用の後の、一つのマーカを含む画像のROI、及び全くマーカを含まない画像(単なる背景)のROIを示している。図7に関して上で説明したように、一実施形態では、図7に関して上で説明したように、一実施形態では、2Dサイズ及び形状の整合性試験720はまた、接続構成要素解析を利用して、さらに、画像の背景からマーカを仕切ることができる。接続構成要素解析では、画像内の全ての接続された構成要素を見つける。ノイズの外形を取り除くために、閾値によって、小さい面積を持つ領域をフィルタリングする。マーカ110のサイズに基づいて、スレッショルドを減少、又は増加させることができる。図11A及び11Bは、それぞれ、低スレッショルドでの接続構成要素解析後の、一つのマーカを含む画像のROI、及び全くマーカを含まない画像のROI(単なる背景)を示している。図12A及び12Bは、それぞれ、図11A及び11Bの画像において使用された閾値より高い閾値での接続構成要素解析後の、一つのマーカを含む画像領域、及びマーカを全く含まない画像領域(単なる背景)を示している。接続構成要素解析手法は、この技術分野で既知であり、従って、詳細な説明は提供しない。
【0072】
図7を参照し返すと、2Dサイズ及び形状の整合性試験720を実施した後、次に、識別されたマーカのマーカリスト721を、3D形状整合性試験730へ出力する。3D形状整合性試験730を使用して、偽マーカをふるい落とすことができる。一実施形態では、エピポーラコインシデンス拘束を使って、3D形状整合性試験730を実施することができる。図8Bに示すように、この条件は、立体画像のペアの可用性に基づいている。画像A内の点(画素の位置)は、3D空間において、線として逆投影される。立体ペアのもう一方の画像Bにおける3D線の画像は、エピポーラ線850である。それゆえ、一方の画像(例えば、画像A)においてマーカ110を検出した時、もう一方の画像(例えば、画像B)におけるその投影は、マーカ110の第一の画像位置のエピポーラ線850上にある、或いは非常に近いはずである。予想される近さの度合いは、較正エラーの量に依る。エピポーラ拘束を使用して、一つの画像において、他の画像における検出に基づいて検出のための探索領域を定め、その制約を満たさない誤った検出を除くことができる。時々、マーカ110は、一方の画像において高い信頼度で検出されるが、その一方で、立体ペアの他方の画像では殆ど見えないことがある。一実施形態では、エピポーラ線850を使用して、マーカ110がよく見えない方の画像において、より低い検出閾値で探索領域を設定する。
【0073】
対象の領域、或いは一又はそれ以上のマーカについて、2Dサイズ及び形状の整合性試験、及び3D形状整合性試験を実施することができる。より少ない画像、及び/又はより少ないマーカの場合においては、図6及び7の上記のステップのサブセット又は変形を使用することができる、ということに注意すべきである。
【0074】
前に言及したように、治療活動におけるマーカ110の位置を、それらの基準位置と比較することにより、患者の体105の位置及び配向、及び/又は治療ビーム402の方向及び形状に対する調整を、治療ビーム402に対する実際のターゲットボリューム403が、可能性のある標識の変形(例えば、腫瘍)を適応させるように、ビーム形状に対して可能な調整をされた計画ターゲットボリューム403にできるだけ近くなるような方法で、計算することができる。推定することのできる患者、及びビームの調整、及びその推定の正確さは、埋め込まれたマーカ110の数、治療活動において第二の画像化様式で生成された画像内で見えるマーカ110の数、治療活動において得られた画像の数、及びターゲットボリューム403の堅さによって変化する。例のケースは、図13の表に関して以下で説明するケースを含む(が、それらに限定されない)。
【0075】
図13は、様々な位置特定パラメータ間の関係を示す表である。表1300は、カラム1310、1320、1330、及び1340を含む。カラム1310は、ターゲットボリュームの堅さ(例えば、治療行程にわたるマーカ110間の間隔がどのくらい固定されているか)についての情報を含む。カラム1320は、画像内で見える、埋め込まれたマーカ110の数を含む。カラム1330は、推定することのできる患者の体105、及び/又は治療ビーム402の位置決めに対する調整を含む。カラム1340は、各治療活動において必要となり得る位置決定用画像の数を含む。
【0076】
一実施形態では、推定することのできる(例えば、患者、及び/又はビームの)調整(及びその推定の正確さ)、及び治療活動の間に必要とされ得る位置決定用画像の数は、(1)ターゲットの堅さ、及び(2)画像内で見えるマーカの数、に基づくものとすることができる。
【0077】
ターゲットの堅さは、相対語で定めることができる。上の表で言及した推定調整のうちの幾つかを実装する有効性は、ターゲットがどれくらい堅いかに依存する。例えば、堅さの仮定は、一般的には、骨のターゲットに付けられたマーカ110として認められ得るものである。これに対して、前立腺は、骨のターゲットよりいくらか広い範囲までの治療の行程の間、変形し、サイズが変化するであろう。前立腺を変形可能なターゲットとして治療し、各治療活動の各場において、MLCの形状を実際に調整するためには、ターゲットボリューム403じゅうにある程度均一に散らばった、より多数のマーカ110が、必要とされるであろう。MLCは、例えば、両方とも引用により本出願に組み入れられる米国特許第5,166,531号、及び第4,868,843号で解説される。
【0078】
前述の明細書では、本発明を、その特定の実施形態の例について説明した。しかしながら、添付の特許請求の範囲で示されたような、本発明のより広い技術的範囲から逸脱することなく、それに様々な修正及び変更が成され得ることが、明らかであろう。例えば、マーカの3D基準座標を、ビームのアイソセンタと直接結びつける必要はない。マーカ110の基準座標を、他の座標系(例えば、場所外の座標)、又はビームアイソセンタとの既知の関係を有するオブジェクトとの対応関係によって、間接的に、アイソセンタに対して特定することもできる。従って、本明細書、及び図面は、限定的な観点ではなく、例示的な観点で考えられるべきである。
【図面の簡単な説明】
【0079】
【図1A】センサ装置、及び複数のマーカ種を有する患者の体の前立腺領域の拡大画像を示している。
【図1B】第二の画像化様式を使った、画像化可能なマーカのアレイ、及び画像化可能でないセンサ装置を有する前立腺領域の拡大画像を示している。
【図2A】その上にマーカが配置されたセンサ装置の一実施形態を示している。
【図2B】その中にマーカが配置されたセンサ装置の代替の実施形態を示している。
【図3】複数の画像化特性を持つケーシングを有するセンサ装置の一実施形態を示している。
【図4】画像化システムの一実施形態を示している。
【図5】図4のデジタル処理システムの一実施形態を示している。
【図6】位置特定方法の一実施形態を示している。
【図7】マーカを検出し、画像内の偽マーカを取り除く一実施形態を示している。
【図8A】異なる時間において画像化された内部マーカ間の位置オフセットの一実施形態を示している。
【図8B】立体画像のペア、及びエピポーラ線の一実施形態を示している。
【図9】マーカを含む画像部分の中央値フィルタリングの一実施形態を示している。
【図10A】中央値フィルタの使用後の、マーカを含む対象の画像領域の一実施形態を示している。
【図10B】中央値フィルタの使用後の、マーカを含まない対象の画像領域の一実施形態を示している。
【図11A】低閾値での接続構成要素解析後の、マーカを含む対象の画像領域の一実施形態を示している。
【図11B】低閾値での接続構成要素解析後の、マーカを含まない対象の画像領域の一実施形態を示している。
【図12A】図11Aの画像に使用されたものより高い閾値での接続構成要素解析後の、マーカを含む対象の画像領域を示している。
【図12B】図11Bの画像に使用されたものより高い閾値での接続構成要素解析後の、マーカを含まない対象の画像領域を示している。
【図13】様々な位置特定パラメータ間の関係を示す表である。
【図14】CTセットを使って,さまざまなビュー角度から生み出されたデジタル再生放射線写真を使って、マーカの位置を特定する代替の実施形態を示している。
【図15】画像化されたマーカの3D座標を図式的に表示する一実施形態を示している。
【特許請求の範囲】
【請求項1】
体内に常駐する複数のマーカを、第一の画像化様式で画像化し、
第一のビームアイソセンタに対する、前記複数のマーカの第一の座標を特定し、
前記複数のマーカを、第二の画像化様式で画像化し、及び、
第二のビームアイソセンタに対する、前記複数のマーカの第二の座標を特定する
ステップを含むことを特徴とする方法。
【請求項2】
前記第一のビームアイソセンタは、予定した治療ビームアイソセンタであり、前記第二のビームアイソセンタは、治療時における治療機械ビームアイソセンタである
ことを特徴とする、請求項1に記載の方法。
【請求項3】
前記第二の座標を前記第一の座標と相互に関係付け、及び
前記複数のマーカのうちの少なくとも一つについて、前記第一の座標と前記第二の座標との間のオフセットを計算すること
をさらに含むことを特徴とする、請求項2に記載の方法。
【請求項4】
前記第一の画像化様式はCTであり、前記第二の画像化様式は、KV及びMV画像化のうちの一方である
ことを特徴とする、請求項2に記載の方法。
【請求項5】
前記計算されたオフセットに基づいて、前記複数のマーカの位置を調整すること
をさらに含むことを特徴とする、請求項3に記載の方法。
【請求項6】
前記第二の画像化様式で画像化された前記複数のマーカの一又はそれ以上を識別すること
をさらに含むことを特徴とする、請求項1に記載の方法。
【請求項7】
前記第一の画像化様式で前記複数のマーカを画像化するステップは、第一の画像を生成し、かつ、前記第二の画像化様式で前記複数のマーカを画像化するステップは、第二の画像を生成する
ことを特徴とする、請求項6に記載の方法。
【請求項8】
前記第二の画像化様式で画像化される前記複数のマーカの一又はそれ以上を識別することは、前記第二の画像の対象の領域の2Dサイズ及び形状整合性試験を実施することを含む
ことを特徴とする、請求項7に記載の方法。
【請求項9】
前記2Dサイズ及び形状整合性試験は、中央値フィルタリング、及び接続構成要素解析を含む
ことを特徴とする、請求項8に記載の方法。
【請求項10】
前記第二の画像化様式で画像化された前記複数のマーカの一又はそれ以上を識別することは、前記第二の画像の前記対象の領域の3D形状整合性試験を実施することを含む
ことを特徴とする、請求項8に記載の方法。
【請求項11】
前記3D形状整合性試験はエピポーラコインシデンス拘束を含む
ことを特徴とする、請求項11に記載の方法。
【請求項12】
前記複数のマーカの一又はそれ以上を識別することは、前記複数のマーカの一又はそれ以上を誤って識別することを含み、
該一又はそれ以上の誤って識別されたマーカを取り除くこと
をさらに含むことを特徴とする、請求項6に記載の方法。
【請求項13】
前記第二の画像化様式で画像化されない前記複数のマーカの一又はそれ以上の位置を特定すること
をさらに含むことを特徴とする、請求項6に記載の方法。
【請求項14】
画像化された前記複数のマーカの一又はそれ以上の前記第一の座標と、前記第二の座標との間の関係に基づいて、前記位置を特定すること
ことを特徴とする、請求項13に記載の方法。
【請求項15】
前記位置を特定することは、
剛体変換を推定し、及び
前記剛体変換を前記第一の座標に適用して、前記第二の画像化様式で画像化されない前記複数のマーカの一又はそれ以上の前記位置を推定すること
を含むことを特徴とする、請求項14に記載の方法。
【請求項16】
前記位置は、ユーザによって手動で特定される
ことを特徴とする、請求項13に記載の方法。
【請求項17】
複数の内部マーカを有する体を提供し、及び
前記複数の内部マーカを使って、治療ビームに対する、前記体内のターゲットボリュームの位置を調整する
ステップを含むことを特徴とする方法。
【請求項18】
前記調整するステップは、第一の画像化様式で画像化される前記複数の内部マーカと、第二の画像化様式で画像化される前記複数の内部マーカとの間の位置オフセットを特定することを含む
ことを特徴とする、請求項17に記載の方法。
【請求項19】
前記複数の内部マーカを埋め込むこと
をさらに含むことを特徴とする、請求項17に記載の方法。
【請求項20】
前記位置オフセットを特定することは、
第一の画像化様式で画像化される前記複数の内部マーカの第一の座標を、第二の画像化様式で画像化される前記複数の内部マーカの第二の座標と相互に関係付け、及び
前記複数のマーカのうちの少なくとも一つについて、前記第一の座標と前記第二の座標との間の差を計算すること
を含むことを特徴とする、請求項17に記載の方法。
【請求項21】
マーカを含む画像を提供し、及び
中央値フィルタを使って、前記画像をフィルタリングする
ステップを含むことを特徴とする方法。
【請求項22】
前記フィルタリングするステップは、推定された中心画素のまわりの周辺画素の中央輝度値をとり、前記中心画素から前記中央輝度値を引いて、フィルタリングされた出力画素輝度値を生成することを含む
ことを特徴とする、請求項21に記載の方法。
【請求項23】
前記周辺画素は、前記中心画素のまわりの、近似円の周辺上の画素である
ことを特徴とする、請求項22に記載の方法。
【請求項24】
前記周辺画素は、前記中心画素のまわりの、近似円の周辺上の画素である
ことを特徴とする、請求項23に記載の方法。
【請求項25】
前記近似円の半径が前記マーカの幅より大きい
ことを特徴とする、請求項24に記載の方法。
【請求項26】
それに命令を格納するマシン読み取り可能な媒体であって、
前記命令は、プロセッサによって実行される時、該プロセッサに
マーカを含む画像の画素輝度に対応する信号を受信し、及び
中央値フィルタを使って、前記画像をフィルタリングすること
を含む上記を実施させる
ことを特徴とする媒体。
【請求項27】
前記フィルタリングすることは、推定されている中心画素のまわりの周辺画素の中央輝度値をとり、該中央輝度値を前記中心画素から引いて、フィルタリングされた出力画素輝度値を生成することを含む
ことを特徴とする、請求項26に記載のマシン読み取り可能な媒体。
【請求項28】
そこに命令を格納するマシン読み取り可能な媒体であって、
前記命令は、プロセッサによって実行される時、該プロセッサに、
画像の対象の領域の2Dサイズ及び形状整合性試験を実施すること、及び
前記対象の領域の3D形状整合性試験を実施して、前記画像内の複数のマーカの一又はそれ以上を識別すること
を含む上記を実施させる
ことを特徴とする媒体。
【請求項29】
前記3D形状整合性試験はエピポーラコインシデンス拘束を含む
ことを特徴とする、請求項28に記載のマシン読み取り可能な媒体。
【請求項30】
前記プロセッサは、前記画像内に見えない前記複数のマーカの一又はそれ以上の位置を特定することを含む上記をさらに実施する
ことを特徴とする、請求項28に記載のマシン読み取り可能な媒体。
【請求項31】
ターゲットを含む体のターゲットボリューム内の複数の内部マーカの一又はそれ以上を画像化して、画像を生成し、及び
前記ターゲットの堅さ、及び前記画像内に見えるマーカの数に基づいて、治療活動において、前記体及び治療ビームの少なくとも一方に対する調整を推定する
ステップを含むことを特徴とする方法。
【請求項32】
前記ターゲットの堅さ、及び前記画像内に見えるマーカの数に基づいて、前記治療活動に必要な位置決定用画像の数を推定すること
をさらに含むことを特徴とする、請求項31に記載の方法。
【請求項33】
前記複数のマーカを埋め込むこと
をさらに含むことを特徴とする、請求項31に記載の方法。
【請求項34】
前記ターゲットが堅く、前記見えるマーカの数が少なくとも1つである
ことを特徴とする、請求項31に記載の方法。
【請求項35】
前記調整が、患者の位置の調整である
ことを特徴とする、請求項34に記載の方法。
【請求項36】
前記調整が、MLCの位置の調整である
ことを特徴とする、請求項34に記載の方法。
【請求項37】
前記ターゲットが堅く、前記見えるマーカの数が少なくとも2つである
ことを特徴とする、請求項31に記載の方法。
【請求項38】
前記調整が、患者の配向の調整である
ことを特徴とする、請求項37に記載の方法。
【請求項39】
前記調整が、MLCの回転の調整である
ことを特徴とする、請求項37に記載の方法。
【請求項40】
前記ターゲットが変形可能であり、かつ、前記見えるマーカの数が三又はそれ以上である
ことを特徴とする、請求項31に記載の方法。
【請求項41】
前記調整が、MLCの形状である
ことを特徴とする、請求項40に記載の方法。
【請求項42】
ターゲットを含む体のターゲットボリューム内の複数の内部マーカの一又はそれ以上を画像化して、画像を生成し、及び
前記ターゲットの堅さ、及び前記画像内に見えるマーカの数に基づいて、治療活動に必要な位置決定用画像の数を推定する
ステップを含むことを特徴とする方法。
【請求項43】
前記ターゲットが堅く、かつ前記見えるマーカの数が少なくとも1つである
ことを特徴とする、請求項42に記載の方法。
【請求項44】
前記位置決定用画像の数が1つである
ことを特徴とする、請求項43に記載の方法。
【請求項45】
前記位置決定用画像が、治療ビームの角度と同じ角度からのものである
ことを特徴とする、請求項42に記載の方法。
【請求項46】
前記ターゲットが堅く、前記見えるマーカの数が三又はそれ以上であり、及び
前記位置決定用画像の数が、三角測量に適した様々な角度からの二又はそれ以上である
ことを特徴とする、請求項32に記載の方法。
【請求項47】
前記ターゲットが変形可能であり、前記見えるマーカの数が三又はそれ以上であり、及び
前記位置決定用画像の数が、少なくとも、治療ビームの角度と同じ角度からの1つである
ことを特徴とする、請求項32に記載の方法。
【請求項48】
前記ターゲットが変形可能であり、前記見えるマーカの数が三又はそれ以上であり、及び
前記位置決定用画像の数が、三角測量に適した様々な角度からの二又はそれ以上である
ことを特徴とする、請求項32に記載の方法。
【請求項49】
体内に常駐する複数のマーカを、第一の画像化様式で画像化するための手段、
第一のビームアイソセンタに対する、前記複数のマーカの第一の座標を特定するための手段、
前記複数のマーカを、第二の画像化様式で画像化するための手段、及び
第二のビームアイソセンタに対する、前記複数のマーカの第二の座標を特定するための手段
を備えることを特徴とする装置。
【請求項50】
前記第一のビームアイソセンタが、予定した治療ビームアイソセンタであり、前記第二のビームアイソセンタが、治療時における治療機械のビームアイソセンタである
ことを特徴とする、請求項49に記載の装置。
【請求項51】
前記第二の座標を、前記第一の座標と相互に関係付けるための手段、及び
前記複数のマーカの少なくとも一つについて、前記第一の座標と前記第二の座標との間のオフセットを計算するための手段、
をさらに備えることを特徴とする、請求項50に記載の装置。
【請求項52】
前記計算されたオフセットに基づいて、前記複数のマーカの位置を調整するための手段、
をさらに備えることを特徴とする、請求項51に記載の装置。
【請求項53】
前記第二の画像化様式で画像化される前記複数のマーカの一又はそれ以上を識別するための手段、
をさらに備えることを特徴とする、請求項49に記載の装置。
【請求項54】
第一のビームアイソセンタを有する画像化ビームを生成する第一のビーム源、
第二のビームアイソセンタを有する治療ビームを生成する第二のビーム源、
前記画像化ビームを受信するように結合された、体内に常駐する複数のマーカを、第一の画像化様式で画像化する第一の画像化装置、
前記治療ビームを受信するように結合された、前記複数のマーカを、第二の画像化様式で画像化する第二の画像化装置、及び
前記第一及び第二の画像化装置に結合された、前記第一のビームアイソセンタに対する前記複数のマーカの第一の座標を特定し、かつ前記第二のビームアイソセンタに対する前記複数のマーカの第二の座標を特定するコンピュータ、
を備えることを特徴とするシステム。
【請求項55】
前記第一の画像化装置、及び前記第二の画像化装置が、同じ画像化装置である
ことを特徴とする、請求項54に記載のシステム。
【請求項1】
体内に常駐する複数のマーカを、第一の画像化様式で画像化し、
第一のビームアイソセンタに対する、前記複数のマーカの第一の座標を特定し、
前記複数のマーカを、第二の画像化様式で画像化し、及び、
第二のビームアイソセンタに対する、前記複数のマーカの第二の座標を特定する
ステップを含むことを特徴とする方法。
【請求項2】
前記第一のビームアイソセンタは、予定した治療ビームアイソセンタであり、前記第二のビームアイソセンタは、治療時における治療機械ビームアイソセンタである
ことを特徴とする、請求項1に記載の方法。
【請求項3】
前記第二の座標を前記第一の座標と相互に関係付け、及び
前記複数のマーカのうちの少なくとも一つについて、前記第一の座標と前記第二の座標との間のオフセットを計算すること
をさらに含むことを特徴とする、請求項2に記載の方法。
【請求項4】
前記第一の画像化様式はCTであり、前記第二の画像化様式は、KV及びMV画像化のうちの一方である
ことを特徴とする、請求項2に記載の方法。
【請求項5】
前記計算されたオフセットに基づいて、前記複数のマーカの位置を調整すること
をさらに含むことを特徴とする、請求項3に記載の方法。
【請求項6】
前記第二の画像化様式で画像化された前記複数のマーカの一又はそれ以上を識別すること
をさらに含むことを特徴とする、請求項1に記載の方法。
【請求項7】
前記第一の画像化様式で前記複数のマーカを画像化するステップは、第一の画像を生成し、かつ、前記第二の画像化様式で前記複数のマーカを画像化するステップは、第二の画像を生成する
ことを特徴とする、請求項6に記載の方法。
【請求項8】
前記第二の画像化様式で画像化される前記複数のマーカの一又はそれ以上を識別することは、前記第二の画像の対象の領域の2Dサイズ及び形状整合性試験を実施することを含む
ことを特徴とする、請求項7に記載の方法。
【請求項9】
前記2Dサイズ及び形状整合性試験は、中央値フィルタリング、及び接続構成要素解析を含む
ことを特徴とする、請求項8に記載の方法。
【請求項10】
前記第二の画像化様式で画像化された前記複数のマーカの一又はそれ以上を識別することは、前記第二の画像の前記対象の領域の3D形状整合性試験を実施することを含む
ことを特徴とする、請求項8に記載の方法。
【請求項11】
前記3D形状整合性試験はエピポーラコインシデンス拘束を含む
ことを特徴とする、請求項11に記載の方法。
【請求項12】
前記複数のマーカの一又はそれ以上を識別することは、前記複数のマーカの一又はそれ以上を誤って識別することを含み、
該一又はそれ以上の誤って識別されたマーカを取り除くこと
をさらに含むことを特徴とする、請求項6に記載の方法。
【請求項13】
前記第二の画像化様式で画像化されない前記複数のマーカの一又はそれ以上の位置を特定すること
をさらに含むことを特徴とする、請求項6に記載の方法。
【請求項14】
画像化された前記複数のマーカの一又はそれ以上の前記第一の座標と、前記第二の座標との間の関係に基づいて、前記位置を特定すること
ことを特徴とする、請求項13に記載の方法。
【請求項15】
前記位置を特定することは、
剛体変換を推定し、及び
前記剛体変換を前記第一の座標に適用して、前記第二の画像化様式で画像化されない前記複数のマーカの一又はそれ以上の前記位置を推定すること
を含むことを特徴とする、請求項14に記載の方法。
【請求項16】
前記位置は、ユーザによって手動で特定される
ことを特徴とする、請求項13に記載の方法。
【請求項17】
複数の内部マーカを有する体を提供し、及び
前記複数の内部マーカを使って、治療ビームに対する、前記体内のターゲットボリュームの位置を調整する
ステップを含むことを特徴とする方法。
【請求項18】
前記調整するステップは、第一の画像化様式で画像化される前記複数の内部マーカと、第二の画像化様式で画像化される前記複数の内部マーカとの間の位置オフセットを特定することを含む
ことを特徴とする、請求項17に記載の方法。
【請求項19】
前記複数の内部マーカを埋め込むこと
をさらに含むことを特徴とする、請求項17に記載の方法。
【請求項20】
前記位置オフセットを特定することは、
第一の画像化様式で画像化される前記複数の内部マーカの第一の座標を、第二の画像化様式で画像化される前記複数の内部マーカの第二の座標と相互に関係付け、及び
前記複数のマーカのうちの少なくとも一つについて、前記第一の座標と前記第二の座標との間の差を計算すること
を含むことを特徴とする、請求項17に記載の方法。
【請求項21】
マーカを含む画像を提供し、及び
中央値フィルタを使って、前記画像をフィルタリングする
ステップを含むことを特徴とする方法。
【請求項22】
前記フィルタリングするステップは、推定された中心画素のまわりの周辺画素の中央輝度値をとり、前記中心画素から前記中央輝度値を引いて、フィルタリングされた出力画素輝度値を生成することを含む
ことを特徴とする、請求項21に記載の方法。
【請求項23】
前記周辺画素は、前記中心画素のまわりの、近似円の周辺上の画素である
ことを特徴とする、請求項22に記載の方法。
【請求項24】
前記周辺画素は、前記中心画素のまわりの、近似円の周辺上の画素である
ことを特徴とする、請求項23に記載の方法。
【請求項25】
前記近似円の半径が前記マーカの幅より大きい
ことを特徴とする、請求項24に記載の方法。
【請求項26】
それに命令を格納するマシン読み取り可能な媒体であって、
前記命令は、プロセッサによって実行される時、該プロセッサに
マーカを含む画像の画素輝度に対応する信号を受信し、及び
中央値フィルタを使って、前記画像をフィルタリングすること
を含む上記を実施させる
ことを特徴とする媒体。
【請求項27】
前記フィルタリングすることは、推定されている中心画素のまわりの周辺画素の中央輝度値をとり、該中央輝度値を前記中心画素から引いて、フィルタリングされた出力画素輝度値を生成することを含む
ことを特徴とする、請求項26に記載のマシン読み取り可能な媒体。
【請求項28】
そこに命令を格納するマシン読み取り可能な媒体であって、
前記命令は、プロセッサによって実行される時、該プロセッサに、
画像の対象の領域の2Dサイズ及び形状整合性試験を実施すること、及び
前記対象の領域の3D形状整合性試験を実施して、前記画像内の複数のマーカの一又はそれ以上を識別すること
を含む上記を実施させる
ことを特徴とする媒体。
【請求項29】
前記3D形状整合性試験はエピポーラコインシデンス拘束を含む
ことを特徴とする、請求項28に記載のマシン読み取り可能な媒体。
【請求項30】
前記プロセッサは、前記画像内に見えない前記複数のマーカの一又はそれ以上の位置を特定することを含む上記をさらに実施する
ことを特徴とする、請求項28に記載のマシン読み取り可能な媒体。
【請求項31】
ターゲットを含む体のターゲットボリューム内の複数の内部マーカの一又はそれ以上を画像化して、画像を生成し、及び
前記ターゲットの堅さ、及び前記画像内に見えるマーカの数に基づいて、治療活動において、前記体及び治療ビームの少なくとも一方に対する調整を推定する
ステップを含むことを特徴とする方法。
【請求項32】
前記ターゲットの堅さ、及び前記画像内に見えるマーカの数に基づいて、前記治療活動に必要な位置決定用画像の数を推定すること
をさらに含むことを特徴とする、請求項31に記載の方法。
【請求項33】
前記複数のマーカを埋め込むこと
をさらに含むことを特徴とする、請求項31に記載の方法。
【請求項34】
前記ターゲットが堅く、前記見えるマーカの数が少なくとも1つである
ことを特徴とする、請求項31に記載の方法。
【請求項35】
前記調整が、患者の位置の調整である
ことを特徴とする、請求項34に記載の方法。
【請求項36】
前記調整が、MLCの位置の調整である
ことを特徴とする、請求項34に記載の方法。
【請求項37】
前記ターゲットが堅く、前記見えるマーカの数が少なくとも2つである
ことを特徴とする、請求項31に記載の方法。
【請求項38】
前記調整が、患者の配向の調整である
ことを特徴とする、請求項37に記載の方法。
【請求項39】
前記調整が、MLCの回転の調整である
ことを特徴とする、請求項37に記載の方法。
【請求項40】
前記ターゲットが変形可能であり、かつ、前記見えるマーカの数が三又はそれ以上である
ことを特徴とする、請求項31に記載の方法。
【請求項41】
前記調整が、MLCの形状である
ことを特徴とする、請求項40に記載の方法。
【請求項42】
ターゲットを含む体のターゲットボリューム内の複数の内部マーカの一又はそれ以上を画像化して、画像を生成し、及び
前記ターゲットの堅さ、及び前記画像内に見えるマーカの数に基づいて、治療活動に必要な位置決定用画像の数を推定する
ステップを含むことを特徴とする方法。
【請求項43】
前記ターゲットが堅く、かつ前記見えるマーカの数が少なくとも1つである
ことを特徴とする、請求項42に記載の方法。
【請求項44】
前記位置決定用画像の数が1つである
ことを特徴とする、請求項43に記載の方法。
【請求項45】
前記位置決定用画像が、治療ビームの角度と同じ角度からのものである
ことを特徴とする、請求項42に記載の方法。
【請求項46】
前記ターゲットが堅く、前記見えるマーカの数が三又はそれ以上であり、及び
前記位置決定用画像の数が、三角測量に適した様々な角度からの二又はそれ以上である
ことを特徴とする、請求項32に記載の方法。
【請求項47】
前記ターゲットが変形可能であり、前記見えるマーカの数が三又はそれ以上であり、及び
前記位置決定用画像の数が、少なくとも、治療ビームの角度と同じ角度からの1つである
ことを特徴とする、請求項32に記載の方法。
【請求項48】
前記ターゲットが変形可能であり、前記見えるマーカの数が三又はそれ以上であり、及び
前記位置決定用画像の数が、三角測量に適した様々な角度からの二又はそれ以上である
ことを特徴とする、請求項32に記載の方法。
【請求項49】
体内に常駐する複数のマーカを、第一の画像化様式で画像化するための手段、
第一のビームアイソセンタに対する、前記複数のマーカの第一の座標を特定するための手段、
前記複数のマーカを、第二の画像化様式で画像化するための手段、及び
第二のビームアイソセンタに対する、前記複数のマーカの第二の座標を特定するための手段
を備えることを特徴とする装置。
【請求項50】
前記第一のビームアイソセンタが、予定した治療ビームアイソセンタであり、前記第二のビームアイソセンタが、治療時における治療機械のビームアイソセンタである
ことを特徴とする、請求項49に記載の装置。
【請求項51】
前記第二の座標を、前記第一の座標と相互に関係付けるための手段、及び
前記複数のマーカの少なくとも一つについて、前記第一の座標と前記第二の座標との間のオフセットを計算するための手段、
をさらに備えることを特徴とする、請求項50に記載の装置。
【請求項52】
前記計算されたオフセットに基づいて、前記複数のマーカの位置を調整するための手段、
をさらに備えることを特徴とする、請求項51に記載の装置。
【請求項53】
前記第二の画像化様式で画像化される前記複数のマーカの一又はそれ以上を識別するための手段、
をさらに備えることを特徴とする、請求項49に記載の装置。
【請求項54】
第一のビームアイソセンタを有する画像化ビームを生成する第一のビーム源、
第二のビームアイソセンタを有する治療ビームを生成する第二のビーム源、
前記画像化ビームを受信するように結合された、体内に常駐する複数のマーカを、第一の画像化様式で画像化する第一の画像化装置、
前記治療ビームを受信するように結合された、前記複数のマーカを、第二の画像化様式で画像化する第二の画像化装置、及び
前記第一及び第二の画像化装置に結合された、前記第一のビームアイソセンタに対する前記複数のマーカの第一の座標を特定し、かつ前記第二のビームアイソセンタに対する前記複数のマーカの第二の座標を特定するコンピュータ、
を備えることを特徴とするシステム。
【請求項55】
前記第一の画像化装置、及び前記第二の画像化装置が、同じ画像化装置である
ことを特徴とする、請求項54に記載のシステム。
【図1A】


【図1B】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図12A】
【図12B】
【図13】
【図14】
【図15】
【図1B】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図12A】
【図12B】
【図13】
【図14】
【図15】
【公表番号】特表2007−505690(P2007−505690A)
【公表日】平成19年3月15日(2007.3.15)
【国際特許分類】
【出願番号】特願2006−526908(P2006−526908)
【出願日】平成16年8月25日(2004.8.25)
【国際出願番号】PCT/US2004/027596
【国際公開番号】WO2005/036124
【国際公開日】平成17年4月21日(2005.4.21)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
2.ペンティアム
3.イーサネット
【出願人】(303064178)ヴァリアン メディカル システムズ テクノロジーズ インコーポレイテッド (10)
【Fターム(参考)】
【公表日】平成19年3月15日(2007.3.15)
【国際特許分類】
【出願日】平成16年8月25日(2004.8.25)
【国際出願番号】PCT/US2004/027596
【国際公開番号】WO2005/036124
【国際公開日】平成17年4月21日(2005.4.21)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
2.ペンティアム
3.イーサネット
【出願人】(303064178)ヴァリアン メディカル システムズ テクノロジーズ インコーポレイテッド (10)
【Fターム(参考)】
[ Back to top ]