
生体情報取得装置

【課題】操作者による操作性を向上させて生体情報の取得エラーを減少させ、かつ小型に構成可能として限られたスペースへの実装も容易する。
【解決手段】前後に回転中心となる回転支点部2を設けた取り付け台1の上下の面に互いの読取り面が逆方向を向くように指静脈情報取得部3と掌静脈情報取得部4を固定した構成として、指静脈情報取得部3と掌静脈情報取得部4の使用したい方が上側になるように回転させ、所望の角度に停止させて指や掌をかざすことで、指や掌の静脈情報を生体情報として取得できるようにした。
【解決手段】前後に回転中心となる回転支点部2を設けた取り付け台1の上下の面に互いの読取り面が逆方向を向くように指静脈情報取得部3と掌静脈情報取得部4を固定した構成として、指静脈情報取得部3と掌静脈情報取得部4の使用したい方が上側になるように回転させ、所望の角度に停止させて指や掌をかざすことで、指や掌の静脈情報を生体情報として取得できるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、銀行の自動化機器等において本人認証を行うための生体情報を取得する生体情報取得装置に関するものである。
【背景技術】
【0002】
銀行の自動化機器等においては、本人認証を行うための生体情報として指静脈情報(指静脈パターン)や掌静脈情報(掌静脈パターン)を取得する生体情報取得装置が使用されている。
従来の生体情報取得装置(生体認証装置)として、例えば、特許文献1に示される装置がある。この生体情報取得装置は、回転台を介して自動化機器に取付け、この回転台により生体情報取得装置を水平方向へ回転可能とし、指や掌を水平にかざすことで生体情報を取得するものとなっている。
【0003】
また、別の生体情報取得装置として、例えば、特許文献2に示されるように指静脈情報取得(指静脈情報検出)センサと、掌(手のひら)静脈情報取得(掌静脈情報検出)センサとを備えた装置がある。この生体情報取得装置では、指静脈情報取得センサを有する指先ガイドを移動可能に支持することで掌静脈情報取得センサとの間の距離を可変にするスライドレールと、前記指先ガイドを掌静脈情報取得センサ側に付勢するバネ部材等からなるセンサ移動機構を設けておき、指を前記指先ガイド上に載せてから、指先ガイドを掌静脈検出センサ側に移動させることで、指及び掌を、指静脈検出センサと掌静脈検出センサ上方の検出位置にセットして、指静脈情報と掌静脈情報を生体情報として同時に取得できるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−277428号公報
【特許文献2】特開2008−054747号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1の装置では、指や掌を水平にかざす必要があるが、人の自然な動作では指や掌が左右に傾くことが多く、そのため指や掌を水平にかざす場合、意図的にそれを行わなければならないため、操作性が悪く、生体情報の取得エラーが生じやすいという問題がある。
【0006】
また、特許文献2の装置では、指静脈情報取得センサと掌静脈情報取得センサ間の距離を可変にするスライドレール及びバネ部材等からなるセンサ移動機構を設けているため、生体情報取得装置が大型になり、自動化機器等の限られたスペースへの実装が困難になるだけでなく、指静脈情報取得センサと掌静脈情報取得センサが水平に配置されているため、指と掌が自然な形になる状態で静脈情報の取得ができず、操作性が悪いという問題がある。
本発明は、このような問題を解決することを課題とする。
【課題を解決するための手段】
【0007】
そのため、本発明は、前後方向に向けた回転支点部を設けた取り付け台の上下の面に、互いの読取り面が逆方向を向くように指静脈情報取得部と掌静脈情報取得部を固定し、
前記指静脈情報取得部と前記掌静脈情報取得部の使用したい方が上側になるように前記回転支点部を中心に回転させ、所望の角度に停止させて指または掌をかざすことで、前記指静脈情報取得部または前記掌静脈情報取得部により指または掌の静脈情報を生体情報として取得することを特徴とする。
【発明の効果】
【0008】
このようにした本発明は、操作者が簡単な操作で指静脈情報取得部と掌静脈情報取得部を使い分けることができ、操作者の指、手、手首、腕、肘、肩等が窮屈な状態になることなく、自然な状態で生体情報の取得が行われるので、操作性が向上し、正常な生体情報を確実に取得できるので、生体情報の取得エラーを減少させることができるという効果が得られる。
また、従来装置のような指静脈情報取得部と掌静脈情報取得部の距離を可変にする移動機構を必要とせず、小型に構成できるので、自動化機器等の取付け対象装置の限られたスペースへの実装も容易になるという効果も得られる。
【図面の簡単な説明】
【0009】
【図1】実施例1を示す斜視図
【図2】実施例1の作用を示す斜視図
【図3】実施例2を示す斜視図
【図4】実施例1の作用を示す斜視図
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明による生体情報取得装置の実施例を説明する。
【実施例1】
【0011】
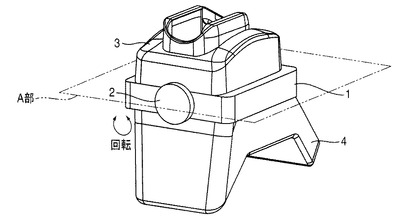
図1は実施例1を示す斜視図で、図において1は取付け台であり、前後の端面の同位置に回転支点部2を有している。この回転支点部2は取付け台1を貫通する軸であってもよい。
3は指静脈情報取得部で、指をかざし易くするために上面側の前後の端部をU字形に切欠いた形状に形成し、底部側には指の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けている。
【0012】
4は掌静脈情報取得部で、掌(手のひら)をかざし易くするために上面側の前後の端部に形成し、底部側には掌の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けている。
指静脈情報取得部3と掌静脈情報取得部4は取付け台1の上下の面に互いの読取り面が逆方向を向くように図示しないネジ等で固定されている。
【0013】
このように構成した生体情報取得装置は、銀行の自動化機器等の取付け対象装置のA部(面)に図示しない回転支点部2を中心に回転でき、かつ任意の角度に停止させて、その停止角度に保持可能なようにトルクヒンジ等によって取り付けられる。この場合、一方向への回転角度は360度程度とし、往復方向に回転可能とする。
【0014】
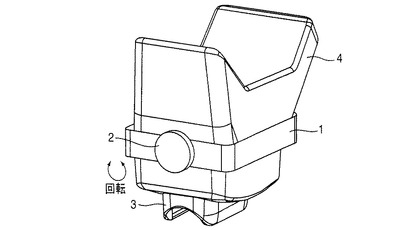
上述した実施例1の作用について説明する。図2は実施例1の作用を示す斜視図で、 操作者が手動により、指静脈情報取得部3と掌静脈情報取得部4のいずれかが上側になるように回転支点部2を中心に回転させる。
【0015】
例えば、図1に示したように指静脈情報取得部3が上側にあり、掌静脈情報取得部4が下側にある状態で、掌静脈情報取得部4を使用したい場合、図2に示したように掌静脈情報取得部4が上側になるように回転支点部2を中心に右または左に回転させ、掌静脈情報取得部4の読取り面が所望の角度で上向きになったとき、回転を停止させる。この状態で、掌静脈情報取得部4の上面側の前後の端部に指の付け根側の部分と手首側の部分を載せるようにして掌をかざすと、掌静脈情報取得部4の底部側に設けた図示しない掌静脈情報取得センサが掌の静脈情報(静脈パターン)を取得(検出)する。
【0016】
また、図2に示したように掌静脈情報取得部4が上側にあり、指静脈情報取得部3が下側にある状態で、指静脈情報取得部3を使用したい場合は、図1に示したように指静脈情報取得部3が上側になるように回転支点部2を中心に右または左に回転させ、指静脈情報取得部3の読取り面が所望の角度で上向きになったとき、回転を停止させる。この状態で指静脈情報取得部3の上面側の前後の端部に例えば人差し指を載せるようしてかざすと、指静脈情報取得部3の底部側に設けた図示しない指静脈情報取得センサが人差し指の静脈情報(静脈パターン)を取得(検出)する。
このように操作者が指静脈情報取得部3と掌静脈情報取得部4のいずれかが上側になるように回転支点部2を中心に回転させ、指静脈情報取得部3や掌静脈情報取得部4に指や掌をかざすことによりそれぞれの静脈情報を生体情報として取得することができる。
【0017】
以上説明したように実施例1では、前後に回転中心となる回転支点部を設けた取り付け台の上下の面に互いの読取り面が逆方向を向くように指静脈情報取得部と掌静脈情報取得部を固定した構成として、指静脈情報取得部と掌静脈情報取得部の使用したい方が上側になるように回転させ、所望の角度に停止させて指や掌をかざすことで、指や掌の静脈情報を生体情報として取得することができるようにしているため、操作者が簡単な操作で指静脈情報取得部と掌静脈情報取得部を使い分けることができ、自然な動作で生体情報の取得が行われるので、操作性が向上し、正常な生体情報を確実に取得できるので、生体情報の取得エラーを減少させることができるという効果が得られる。
また、実施例1では、従来装置のような指静脈情報取得部と掌静脈情報取得部の距離を可変にする移動機構を必要とせず、小型に構成できるので、自動化機器等の取付け対象装置の限られたスペースへの実装も容易になるという効果も得られる。
【実施例2】
【0018】
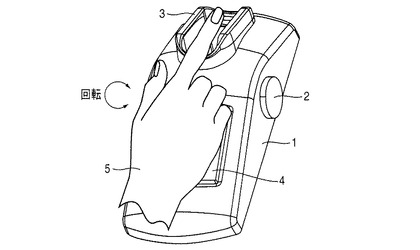
図3は実施例2を示す斜視図で、この実施例2は取付け台1の左右の端面の同位置に回転支点部2を設け、この回転支点部2を境にして取付け台1の前部側に指静脈情報取得部3をネジ等で固定すると共に、取付け台1の後部側に掌静脈情報取得部4を指静脈情報取得部3に対して所定の角度(鈍角)を成すようにネジ等で固定したものとなっている。この指静脈情報取得部3と掌静脈情報取得部4が成す角度は鈍角であり、より具体的には親指と人差し指以外の指を軽く曲げたときつまり自然な握り手にしたとき人差し指と掌が成す角度とする。
【0019】
この実施例2においても回転支点部2が取付け台1を貫通する軸であってもよい。
また、指静脈情報取得部3は、指をかざし易くするために上面側の前後の端部をU字形に切欠いた形状に形成し、底部側には指の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けているもので、掌静脈情報取得部4は、掌(手のひら)をかざし易くするために上面側の前後の端部に形成し、底部側には掌の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けている。
【0020】
このように構成した生体情報取得装置は、回転支点部2を中心に回転でき、かつ任意の角度に停止させて、その停止角度に保持可能なように銀行の自動化機器等の取付け対象装置トルクヒンジ等によって取り付けられる。
【0021】
上述した実施例2の作用について説明する。図4は実施例2の作用を示す斜視図で、 操作者が自身の手5を自然な握り手の状態で、指静脈情報取得部3の上面側の前後の端部に例えば人差し指を載せるようしてかざすと共に、掌静脈情報取得部4の上面側の前後の端部に指の付け根側の部分と手首側の部分を載せるようにして掌をかざすと、指静脈情報取得部3と掌静脈情報取得部4が操作者の手になじむように回転支点部2を中心に回転する。そして、この状態で指静脈情報取得部3の底部側に設けた図示しない指静脈情報取得センサが人差し指の静脈情報(静脈パターン)を取得(検出)し、同時に掌静脈情報取得部4の底部側に設けた図示しない掌静脈情報取得センサが掌の静脈情報(静脈パターン)を取得(検出)する。
【0022】
このように操作者が自然な握り手の状態で指静脈情報取得部3と掌静脈情報取得部4に指と掌をかざすことにより指や掌のそれぞれの静脈情報を生体情報として同時に取得することができる。
【0023】
以上説明したように実施例2では、取付け台の左右の端面の同位置に回転支点部を設け、この回転支点部を境にして取付け台の前部側に指静脈情報取得部を固定すると共に、取付け台の後部側に掌静脈情報取得部を固定し、指静脈情報取得部と掌静脈情報取得部が成す角度を、自然な握り手にしたとき人差し指と掌が成す自然な角度にする構成として、自然な握り手の状態で指静脈情報取得部と掌静脈情報取得部に指と掌をかざすことにより指や掌のそれぞれの静脈情報を生体情報として同時に取得することができるようにしているため、操作者の簡単な操作と、自然な動作で生体情報の取得が行われことになり、これにより操作性が向上し、正常な生体情報を確実に取得できるので、生体情報の取得エラーを減少させることができるという効果が得られる。
【0024】
また、実施例2でも、従来装置のような指静脈情報取得部と掌静脈情報取得部の距離を可変にする移動機構を必要とせず、小型に構成できるので、自動化機器等の取付け対象装置の限られたスペースへの実装も容易になるという効果も得られ、更に移動機構による移動を行わないため、生体情報の取得にかかる時間を短縮できるという効果も得られる。
【0025】
また、指静脈情報取得部と掌静脈情報取得部を左右の手で使い分ける際に、指静脈情報取得部と掌静脈情報取得部にかざす握り手形状を区別する必要がなく、どちらの手であっても同一の自然な握り手形状にて、常に最適な状態での静脈情報の取得が可能になるという効果も得られる。
【符号の説明】
【0026】
1 取付け台
2 回転支点部
3 指静脈情報取得部
4 掌静脈情報取得部
5 手
【技術分野】
【0001】
本発明は、銀行の自動化機器等において本人認証を行うための生体情報を取得する生体情報取得装置に関するものである。
【背景技術】
【0002】
銀行の自動化機器等においては、本人認証を行うための生体情報として指静脈情報(指静脈パターン)や掌静脈情報(掌静脈パターン)を取得する生体情報取得装置が使用されている。
従来の生体情報取得装置(生体認証装置)として、例えば、特許文献1に示される装置がある。この生体情報取得装置は、回転台を介して自動化機器に取付け、この回転台により生体情報取得装置を水平方向へ回転可能とし、指や掌を水平にかざすことで生体情報を取得するものとなっている。
【0003】
また、別の生体情報取得装置として、例えば、特許文献2に示されるように指静脈情報取得(指静脈情報検出)センサと、掌(手のひら)静脈情報取得(掌静脈情報検出)センサとを備えた装置がある。この生体情報取得装置では、指静脈情報取得センサを有する指先ガイドを移動可能に支持することで掌静脈情報取得センサとの間の距離を可変にするスライドレールと、前記指先ガイドを掌静脈情報取得センサ側に付勢するバネ部材等からなるセンサ移動機構を設けておき、指を前記指先ガイド上に載せてから、指先ガイドを掌静脈検出センサ側に移動させることで、指及び掌を、指静脈検出センサと掌静脈検出センサ上方の検出位置にセットして、指静脈情報と掌静脈情報を生体情報として同時に取得できるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−277428号公報
【特許文献2】特開2008−054747号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1の装置では、指や掌を水平にかざす必要があるが、人の自然な動作では指や掌が左右に傾くことが多く、そのため指や掌を水平にかざす場合、意図的にそれを行わなければならないため、操作性が悪く、生体情報の取得エラーが生じやすいという問題がある。
【0006】
また、特許文献2の装置では、指静脈情報取得センサと掌静脈情報取得センサ間の距離を可変にするスライドレール及びバネ部材等からなるセンサ移動機構を設けているため、生体情報取得装置が大型になり、自動化機器等の限られたスペースへの実装が困難になるだけでなく、指静脈情報取得センサと掌静脈情報取得センサが水平に配置されているため、指と掌が自然な形になる状態で静脈情報の取得ができず、操作性が悪いという問題がある。
本発明は、このような問題を解決することを課題とする。
【課題を解決するための手段】
【0007】
そのため、本発明は、前後方向に向けた回転支点部を設けた取り付け台の上下の面に、互いの読取り面が逆方向を向くように指静脈情報取得部と掌静脈情報取得部を固定し、
前記指静脈情報取得部と前記掌静脈情報取得部の使用したい方が上側になるように前記回転支点部を中心に回転させ、所望の角度に停止させて指または掌をかざすことで、前記指静脈情報取得部または前記掌静脈情報取得部により指または掌の静脈情報を生体情報として取得することを特徴とする。
【発明の効果】
【0008】
このようにした本発明は、操作者が簡単な操作で指静脈情報取得部と掌静脈情報取得部を使い分けることができ、操作者の指、手、手首、腕、肘、肩等が窮屈な状態になることなく、自然な状態で生体情報の取得が行われるので、操作性が向上し、正常な生体情報を確実に取得できるので、生体情報の取得エラーを減少させることができるという効果が得られる。
また、従来装置のような指静脈情報取得部と掌静脈情報取得部の距離を可変にする移動機構を必要とせず、小型に構成できるので、自動化機器等の取付け対象装置の限られたスペースへの実装も容易になるという効果も得られる。
【図面の簡単な説明】
【0009】
【図1】実施例1を示す斜視図
【図2】実施例1の作用を示す斜視図
【図3】実施例2を示す斜視図
【図4】実施例1の作用を示す斜視図
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明による生体情報取得装置の実施例を説明する。
【実施例1】
【0011】
図1は実施例1を示す斜視図で、図において1は取付け台であり、前後の端面の同位置に回転支点部2を有している。この回転支点部2は取付け台1を貫通する軸であってもよい。
3は指静脈情報取得部で、指をかざし易くするために上面側の前後の端部をU字形に切欠いた形状に形成し、底部側には指の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けている。
【0012】
4は掌静脈情報取得部で、掌(手のひら)をかざし易くするために上面側の前後の端部に形成し、底部側には掌の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けている。
指静脈情報取得部3と掌静脈情報取得部4は取付け台1の上下の面に互いの読取り面が逆方向を向くように図示しないネジ等で固定されている。
【0013】
このように構成した生体情報取得装置は、銀行の自動化機器等の取付け対象装置のA部(面)に図示しない回転支点部2を中心に回転でき、かつ任意の角度に停止させて、その停止角度に保持可能なようにトルクヒンジ等によって取り付けられる。この場合、一方向への回転角度は360度程度とし、往復方向に回転可能とする。
【0014】
上述した実施例1の作用について説明する。図2は実施例1の作用を示す斜視図で、 操作者が手動により、指静脈情報取得部3と掌静脈情報取得部4のいずれかが上側になるように回転支点部2を中心に回転させる。
【0015】
例えば、図1に示したように指静脈情報取得部3が上側にあり、掌静脈情報取得部4が下側にある状態で、掌静脈情報取得部4を使用したい場合、図2に示したように掌静脈情報取得部4が上側になるように回転支点部2を中心に右または左に回転させ、掌静脈情報取得部4の読取り面が所望の角度で上向きになったとき、回転を停止させる。この状態で、掌静脈情報取得部4の上面側の前後の端部に指の付け根側の部分と手首側の部分を載せるようにして掌をかざすと、掌静脈情報取得部4の底部側に設けた図示しない掌静脈情報取得センサが掌の静脈情報(静脈パターン)を取得(検出)する。
【0016】
また、図2に示したように掌静脈情報取得部4が上側にあり、指静脈情報取得部3が下側にある状態で、指静脈情報取得部3を使用したい場合は、図1に示したように指静脈情報取得部3が上側になるように回転支点部2を中心に右または左に回転させ、指静脈情報取得部3の読取り面が所望の角度で上向きになったとき、回転を停止させる。この状態で指静脈情報取得部3の上面側の前後の端部に例えば人差し指を載せるようしてかざすと、指静脈情報取得部3の底部側に設けた図示しない指静脈情報取得センサが人差し指の静脈情報(静脈パターン)を取得(検出)する。
このように操作者が指静脈情報取得部3と掌静脈情報取得部4のいずれかが上側になるように回転支点部2を中心に回転させ、指静脈情報取得部3や掌静脈情報取得部4に指や掌をかざすことによりそれぞれの静脈情報を生体情報として取得することができる。
【0017】
以上説明したように実施例1では、前後に回転中心となる回転支点部を設けた取り付け台の上下の面に互いの読取り面が逆方向を向くように指静脈情報取得部と掌静脈情報取得部を固定した構成として、指静脈情報取得部と掌静脈情報取得部の使用したい方が上側になるように回転させ、所望の角度に停止させて指や掌をかざすことで、指や掌の静脈情報を生体情報として取得することができるようにしているため、操作者が簡単な操作で指静脈情報取得部と掌静脈情報取得部を使い分けることができ、自然な動作で生体情報の取得が行われるので、操作性が向上し、正常な生体情報を確実に取得できるので、生体情報の取得エラーを減少させることができるという効果が得られる。
また、実施例1では、従来装置のような指静脈情報取得部と掌静脈情報取得部の距離を可変にする移動機構を必要とせず、小型に構成できるので、自動化機器等の取付け対象装置の限られたスペースへの実装も容易になるという効果も得られる。
【実施例2】
【0018】
図3は実施例2を示す斜視図で、この実施例2は取付け台1の左右の端面の同位置に回転支点部2を設け、この回転支点部2を境にして取付け台1の前部側に指静脈情報取得部3をネジ等で固定すると共に、取付け台1の後部側に掌静脈情報取得部4を指静脈情報取得部3に対して所定の角度(鈍角)を成すようにネジ等で固定したものとなっている。この指静脈情報取得部3と掌静脈情報取得部4が成す角度は鈍角であり、より具体的には親指と人差し指以外の指を軽く曲げたときつまり自然な握り手にしたとき人差し指と掌が成す角度とする。
【0019】
この実施例2においても回転支点部2が取付け台1を貫通する軸であってもよい。
また、指静脈情報取得部3は、指をかざし易くするために上面側の前後の端部をU字形に切欠いた形状に形成し、底部側には指の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けているもので、掌静脈情報取得部4は、掌(手のひら)をかざし易くするために上面側の前後の端部に形成し、底部側には掌の静脈情報(静脈パターン)を取得(検出)する図示しない指静脈情報取得センサを設けている。
【0020】
このように構成した生体情報取得装置は、回転支点部2を中心に回転でき、かつ任意の角度に停止させて、その停止角度に保持可能なように銀行の自動化機器等の取付け対象装置トルクヒンジ等によって取り付けられる。
【0021】
上述した実施例2の作用について説明する。図4は実施例2の作用を示す斜視図で、 操作者が自身の手5を自然な握り手の状態で、指静脈情報取得部3の上面側の前後の端部に例えば人差し指を載せるようしてかざすと共に、掌静脈情報取得部4の上面側の前後の端部に指の付け根側の部分と手首側の部分を載せるようにして掌をかざすと、指静脈情報取得部3と掌静脈情報取得部4が操作者の手になじむように回転支点部2を中心に回転する。そして、この状態で指静脈情報取得部3の底部側に設けた図示しない指静脈情報取得センサが人差し指の静脈情報(静脈パターン)を取得(検出)し、同時に掌静脈情報取得部4の底部側に設けた図示しない掌静脈情報取得センサが掌の静脈情報(静脈パターン)を取得(検出)する。
【0022】
このように操作者が自然な握り手の状態で指静脈情報取得部3と掌静脈情報取得部4に指と掌をかざすことにより指や掌のそれぞれの静脈情報を生体情報として同時に取得することができる。
【0023】
以上説明したように実施例2では、取付け台の左右の端面の同位置に回転支点部を設け、この回転支点部を境にして取付け台の前部側に指静脈情報取得部を固定すると共に、取付け台の後部側に掌静脈情報取得部を固定し、指静脈情報取得部と掌静脈情報取得部が成す角度を、自然な握り手にしたとき人差し指と掌が成す自然な角度にする構成として、自然な握り手の状態で指静脈情報取得部と掌静脈情報取得部に指と掌をかざすことにより指や掌のそれぞれの静脈情報を生体情報として同時に取得することができるようにしているため、操作者の簡単な操作と、自然な動作で生体情報の取得が行われことになり、これにより操作性が向上し、正常な生体情報を確実に取得できるので、生体情報の取得エラーを減少させることができるという効果が得られる。
【0024】
また、実施例2でも、従来装置のような指静脈情報取得部と掌静脈情報取得部の距離を可変にする移動機構を必要とせず、小型に構成できるので、自動化機器等の取付け対象装置の限られたスペースへの実装も容易になるという効果も得られ、更に移動機構による移動を行わないため、生体情報の取得にかかる時間を短縮できるという効果も得られる。
【0025】
また、指静脈情報取得部と掌静脈情報取得部を左右の手で使い分ける際に、指静脈情報取得部と掌静脈情報取得部にかざす握り手形状を区別する必要がなく、どちらの手であっても同一の自然な握り手形状にて、常に最適な状態での静脈情報の取得が可能になるという効果も得られる。
【符号の説明】
【0026】
1 取付け台
2 回転支点部
3 指静脈情報取得部
4 掌静脈情報取得部
5 手
【特許請求の範囲】
【請求項1】
前後方向に向けた回転支点部を設けた取り付け台の上下の面に、互いの読取り面が逆方向を向くように指静脈情報取得部と掌静脈情報取得部を固定し、
前記指静脈情報取得部と前記掌静脈情報取得部の使用したい方が上側になるように前記回転支点部を中心に回転させ、所望の角度に停止させて指または掌をかざすことで、前記指静脈情報取得部または前記掌静脈情報取得部により指または掌の静脈情報を生体情報として取得することを特徴とする生体情報取得装置。
【請求項2】
取付け台の左右の端面の同位置に回転支点部を設け、この回転支点部を境にして前記取付け台の前部側に指静脈情報取得部を固定すると共に、前記取付け台の後部側に掌静脈情報取得部を固定し、
前記指静脈情報取得部と前記掌静脈情報取得部が成す角度を、自然な握り手にしたとき人差し指と掌が成す自然な角度として、前記指静脈情報取得部と前記掌静脈情報取得部に指と掌をかざすことにより指及び掌のそれぞれの静脈情報を生体情報として同時に取得することを特徴とする生体情報取得装置。
【請求項1】
前後方向に向けた回転支点部を設けた取り付け台の上下の面に、互いの読取り面が逆方向を向くように指静脈情報取得部と掌静脈情報取得部を固定し、
前記指静脈情報取得部と前記掌静脈情報取得部の使用したい方が上側になるように前記回転支点部を中心に回転させ、所望の角度に停止させて指または掌をかざすことで、前記指静脈情報取得部または前記掌静脈情報取得部により指または掌の静脈情報を生体情報として取得することを特徴とする生体情報取得装置。
【請求項2】
取付け台の左右の端面の同位置に回転支点部を設け、この回転支点部を境にして前記取付け台の前部側に指静脈情報取得部を固定すると共に、前記取付け台の後部側に掌静脈情報取得部を固定し、
前記指静脈情報取得部と前記掌静脈情報取得部が成す角度を、自然な握り手にしたとき人差し指と掌が成す自然な角度として、前記指静脈情報取得部と前記掌静脈情報取得部に指と掌をかざすことにより指及び掌のそれぞれの静脈情報を生体情報として同時に取得することを特徴とする生体情報取得装置。
【図1】


【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−159888(P2012−159888A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−17248(P2011−17248)
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000000295)沖電気工業株式会社 (6,645)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000000295)沖電気工業株式会社 (6,645)
【Fターム(参考)】
[ Back to top ]