
生体状態推定装置及びプログラム並びに記録媒体
【課題】例えば運転中などの様に、精度の高い生体状態の推定が難しい状況においても、高い精度の生体状態の推定が可能な生体状態推定装置を提供すること。
【解決手段】ステップ200では、心電センサ1とドライバの手とが接触しているか否かを判定する。ステップ210では、心電波形から算出した心拍間隔が、所定の範囲内であるか否かを判定する。ステップ200で心電センサ1との接触状態が適切でないと判断された場合、或いは、ステップ210で心拍間隔のデータが異常であると判断された場合には、ステップ230にて、脈波センサ3とドライバの手とが接触しているか否かを判定する。ステップ240では、脈波波形から算出した脈波間隔が、所定の範囲内であるか否かを判定する。ステップ250では、脈拍間隔が正常であるので、この脈拍間隔を用いて心拍間隔を補間し、その心拍間隔を、記憶装置17や表示装置19に出力する。
【解決手段】ステップ200では、心電センサ1とドライバの手とが接触しているか否かを判定する。ステップ210では、心電波形から算出した心拍間隔が、所定の範囲内であるか否かを判定する。ステップ200で心電センサ1との接触状態が適切でないと判断された場合、或いは、ステップ210で心拍間隔のデータが異常であると判断された場合には、ステップ230にて、脈波センサ3とドライバの手とが接触しているか否かを判定する。ステップ240では、脈波波形から算出した脈波間隔が、所定の範囲内であるか否かを判定する。ステップ250では、脈拍間隔が正常であるので、この脈拍間隔を用いて心拍間隔を補間し、その心拍間隔を、記憶装置17や表示装置19に出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば車両に搭載されてドライバ等の生体の状態を推定できる生体状態推定装置及びプログラム並びに記録媒体に関する。
【背景技術】
【0002】
従来より、運転中のドライバの状態を推定する方法として、ドライバの心拍数を測定し、その心拍数の変化からドライバの状態を判定する技術が提案されている(特許文献1参照)。この技術では、心電信号から心拍数を精度良く検出するために、心拍間隔の状態に基づいて心拍数のデータのチェックしている。
【0003】
またこれとは別に、医療分野において患者の状態を把握するために、患者の心拍数と心拍間隔とを求める場合、心電図の代替えとして脈波を用いる技術が提案されている(特許文献2参照)。この技術は、脈波センサによって得られた脈波R−R間隔を心拍間隔と等価とみなして、心拍間隔を求めるものである。
【特許文献1】特開平6−22914号公報
【特許文献2】特開平8−229013号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
心電信号は、皮膚に電極を貼り付けて、電極2点間での電位差を増幅することにより検出できるが、例えばステアリングの左右に電極を埋め込んだセンサによる計測の場合や、車内振動下での計測時などでは、心電波形が不安定となることがあり、心電R波と心電R波との時間間隔である心拍間隔、ひいては、そこから算出できる生体指標、例えば心拍数やゆらぎを示す心拍間隔の変動値などの算出が困難となるという問題も生ずる。
【0005】
このような場合、前記特許文献1の技術では、前後の正常な心拍間隔データの中間値で補間しているが、根拠のない補間値では誤差が発生するという問題がある。
また、前記特許文献2の技術においては、心電信号と脈波信号の位相差は、血圧や血管などユーザの状態により変化するため、脈拍間隔と心拍間隔は完全に1:1とはいえず、その誤差が考慮されていないという問題がある。つまり、日常、様々な環境下で計測する場合は、その差を考慮する必要があるが、現状では、脈拍間隔は単に心拍間隔の代替(置き換え)として使用されるだけであり、よって、その誤差を考慮することなく、心拍間隔の変動値を表示したり被験者の状態を推定することは適当でない。
【0006】
本発明は、上記問題点を解決するためになされたものであり、心拍間隔を精度良く検出できる生体状態推定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)請求項1の発明は、心電波形取得手段によって得られた生体の心電波形と、脈波波形取得手段によって得られた生体の脈波波形とに基づいて、生体の状態を推定する生体状態推定装置であって、前記心電波形が心拍を検出するのに適切でない状態であるか否かを判定する測定状態判定手段と、前記測定状態判定手段によって前記心電波形が心拍を検出するのに適切でない状態であると判定された場合には、前記脈波波形を用いて前記心電波形の補間を行う補間手段と、を備えたことを特徴とする。
【0008】
本発明では、心電波形が心拍を検出するのに適切でない状態であるか否かを判定し、心電波形が心拍を検出するのに適切でない状態であると判定された場合には、脈波波形を用いて心電波形の補間を行う。
【0009】
従って、心拍を検出するのに好ましい心電波形が得られない場合であっても、常に高い精度で心拍間隔を検出することができる。よって、この心拍間隔を用いて、心拍数や心拍間隔の変動量を示す指標などの算出ができるので、これらの指標等を用いて生体の状態を精度良く推定することができる。
【0010】
ここで、心電波形が心拍を検出するのに適切でない状態としては、例えばセンサの装着状態が不十分な場合(電極の非接触等)や、車両振動等によってノイズが発生する場合が挙げられる。つまり、この様な状態では、正確な心拍間隔を求めるのに必要な心電波形が得られないことがある。
【0011】
(2)請求項2の発明では、 前記測定状態判定手段は、前記心電波形取得手段と前記生体との接触状態又は前記脈波波形取得手段と前記生体との接触状態を検出する接触状態検出手段から信号に基づいて、心拍の検出に適した状態か否かを判定することを特徴とする。
【0012】
例えば心電センサの様な心電波形取得手段が生体に適正に装着されていない場合(例えば電極に接触していない場合)には、正確な心電波形が得られない。従って、心電波形取得手段と生体との接触状態を、例えば接触インピーダンスセンサの様な接触状態検出手段で検出することにより、心拍の検出に適した状態か否かを判定することができる。
【0013】
同様に、脈波センサの様な脈波波形取得手段が生体に適正に装着されていない場合(例えばセンサとの間に隙間がある場合)には、正確な脈波波形が得られない。従って、脈波波形取得手段と生体との接触状態を、例えば圧力センサの様な接触状態検出手段で検出することにより、脈拍の検出に適した状態か否かを判定することができる。
【0014】
(3)請求項3の発明では、前記測定状態判定手段は、心拍間隔が所定の許容範囲を外れたか否かによって、心拍の検出に適した状態か否かを判定することを特徴とする。
心拍間隔が通常ではありえない程度に過大な場合や過少な場合には、例えばセンサの装着ミスやノイズ等が原因である考えられるので、その様な場合には、心拍の検出に適した状態ではないと判定する。これにより、心拍の検出に適した状態か否かの状態判定を精度良く行うことができる。
【0015】
(4)請求項4の発明では、前記補間手段は、心拍間隔を脈拍間隔で補間することを特徴とする。
例えば心電センサによって得られた心拍間隔と例えば脈波センサによって得られた脈拍間隔とは、後述する図4に示す様に、完全ではないものの、ほぼ1:1の対応関係にあるので、精度の高い心電間隔が得られない期間は、脈波間隔を用いて補間することができる。
【0016】
(5)請求項5の発明では、前記補間手段は、脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点を用いて脈拍間隔を求め、該脈拍間隔を用いて心拍間隔を補間することを特徴とする。
【0017】
脈拍間隔は、脈拍毎の波形に繰り返して現れるピーク等を示す特徴点、即ち、脈波波形の特徴点(例えば周知の進行波のピークP1等)や、脈波の1階微分波形の特徴点(例えば速度脈波のa1等)や、波形の2階微分波形の特徴点(例えば加速度脈波のa等)を用いて算出することができる。
【0018】
(6)請求項6の発明では、前記補間手段は、心拍間隔に対応している最新の脈拍間隔を用いて、そのまま補間することを特徴とする。
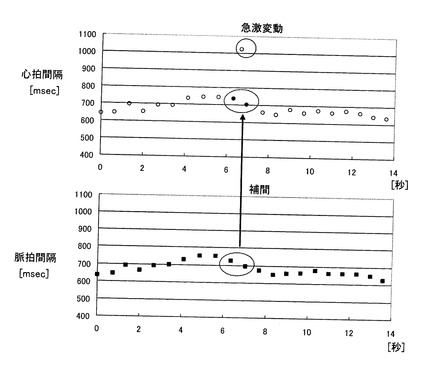
本発明は、補間方法を例示したものである。本発明では、後述する図5に示す様に、精度の低い心拍間隔に対応している最新の脈拍間隔を用いて、そのまま補間する。これにより、簡易な手法で精度良く心拍間隔を補間することができる。
【0019】
(7)請求項7の発明では、
前記補間手段は、前回の心電R波と前回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点との時間差と、今回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点の位置とから、今回の心電R波位置を推定し、該推定した今回の心電R波位置と前回の心電R波との時間間隔を、心拍間隔として補間することを特徴とする。
【0020】
本発明は、補間方法を例示したものである。本発明では、後述する図11に示す様に、脈波波形のずれを考慮して心拍間隔を補間することができる。
(8)請求項8の発明では、前記補間した心拍間隔から、心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出することを特徴とする。
【0021】
本発明では、補間した心拍間隔を用いることにより、精度良く心拍数や心拍間隔の変動量を示す指標を算出することができる。
なお、心拍間隔の変動量を示す指標(いわゆる心拍数のゆらぎを示す指標)としては、例えば周知の(心拍数のゆらぎを周波数解析して得られる)ゆらぎの高周波成分(HF)、低周波成分(LF)、その成分の比(LF/HF)等が挙げられる。
【0022】
(9)請求項9の発明では、前記心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出する際に、前記補間の数、補間の連続数、及び補間の割合のうち少なくとも1種に応じて、データの信頼性を示す信頼度を算出することを特徴とする。
【0023】
補間が多いということは、好ましい心拍波形が得られていない状態であるので、データの信頼性を示すために、補間の状態に応じた信頼度を算出する。
ここで、補間の数とは、補間を行った回数のことであり、補間の連続数とは、補間を行った回数のうち補間が連続している数のことであり、補間の割合とは、所定期間における心拍数(又は脈波数)のうち補間を行った回数の割合のことである。
【0024】
(10)請求項10の発明では、前記信頼度は、前記補間の数、補間の連続数、及び補間の割合について、いずれも多いほど低下することを特徴とする。
補間の数が多いほど、補間を連続して行うほど、または、補間の割合が多いほどデータの信頼性が低いと考えられるので、本発明ではその様に設定している。
【0025】
(11)請求項11の発明では、前記心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち、少なくとも1種を表示することを特徴とする。
本発明では、心拍数や心拍間隔の変動量を示す指標や信頼度を、ディスプレイ等に表示する。なお、音声等で報知してもよい。
【0026】
(12)請求項12の発明は、前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち少なくとも2種から、ユーザの状態を判定することを特徴とする。
本発明は、ドライバ等の状態(例えば不整脈等の状態)を判定する場合は、心拍数や心拍間隔の変動量を示す指標や信頼度を用いるので、精度良く状態判定を行うことができる。
【0027】
(13)請求項13の発明は、前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定の閾値を切り換えることを特徴とする。
例えば信頼度が低い場合には、データの信頼性が低いのであるから、通常通りに心拍数や心拍間隔の変動量を示す指標による状態判定を行う場合に比べて、例えば異常と判定する基準を高くする(異常との判定をし難くする)ことにより、誤判定を防止することができる。
【0028】
(14)請求項14の発明では、前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定に用いるデータの重み付けを変えることを特徴とする。
判定に用いるデータには、信頼性の高いものと低いものがある。例えば補間の数が同じでも、それが連続した補間であるか否かで信頼性が異なる。よって、例えば信頼度が低い場合には、異常との判定をし難くする様にデータに重み付けすることにより、前記請求項13の発明と同様に、誤判定を防止することができる。
【0029】
(15)請求項15の発明では、前記ユーザの状態を判定する場合には、その判定結果及び前記信頼度のうち、少なくとも判定結果を表示する。
本発明では、判定結果や信頼度を例えばディスプレイに表示するので、ドライバ等はその表示から自身の状態を認識することができる。
【0030】
(16)請求項16の発明では、前記信頼度が所定以上の場合のみ、前記表示内容を表示することを特徴とする。
信頼度が低い場合、判定結果等を表示しても、ドライバ等に不安を与えるだけであるので、必要度が高いデータのみを表示する様にする。
【0031】
(17)請求項17の発明では、前記信頼度が低下した場合に、該信頼度低下に関する警告を行うことを特徴とする。
信頼度が低下した場合に警告を行うことにより、例えばドライバ等はセンサの装着状態等を確認することができる。
【0032】
(18)請求項18の発明では、前記脈波波形取得手段の装着状態が良いかどうかを、前記装着状態判定手段から判断し、良い場合のみ前記補間処理を実行することを特徴とする。
【0033】
例えば脈波センサの装着状態が悪い場合には、脈波センサから得られる脈波波形も精度が高いものではない。従って、脈波センサ等の装着状態が良い場合のみ脈波波形による補間を行うのである。
【0034】
(19)請求項19の発明では、前記生体状態の推定を、車両内におけるドライバに対して実行することを特徴とする。
本発明は、生体状態の推定対象を例示したものである。
【0035】
(20)請求項20の発明では、前記信頼度を、車両情報を組み合わせて算出することを特徴とする。
例えば車両がカーブを走行している場合や高速で走行している場合には、センサの装着状態が悪くなったりノイズが大きくなったりすることがある。従って、車両状態に対応して信頼度を設定することが望ましい。
【0036】
(21)請求項21の発明では、前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうちの少なくとも2種と、車両情報とから、前記ドライバの状態を判定することを特徴とする。
【0037】
上述した様に、車両の状態によってセンサ等から得られる信号の状態も変化するので、生体情報だけでなく、車両情報(例えば車速や操舵角)も加味してドライバの状態を判定することが好ましい。
【0038】
(22)請求項22の発明では、前記ドライバの状態を判定結果に基づいて、車両を制御することを特徴とする。
例えばドライバの状態が運転に好ましくない状態となった場合(例えば不整脈が発生した場合)などには、その旨を記憶したり、又はその旨を報知する(例えばディスプレイに表示又は音声等で報知)。また、車両の走行状態を制御する。具体的には、加速を禁止したり、徐々に速度を低下させたり、ハザードランプを点滅する制御等を実施してもよい。
【0039】
(23)請求項23の発明では、前記車両のナビゲーション装置を用いて、前記生体状態の推定結果及び警告内容の少なくとも一方を表示することを特徴とする。
ナビゲーション装置には、ディスプレイが装備されているので、このディスプレイを用いて判定結果や警告を表示する。なお、音声等で報知してもよい。
【0040】
(24)請求項24の発明は、前記請求項1〜23のいずれかに記載の生体状態推定装置の機能を実現させるためのプログラムである。
よって、マイクロコンピュータ等でこのプログラムを実施することにより、補間処理、指標等の演算処理、生体状態の推定処理等を行うことができる。
【0041】
(25)請求項25の発明は、前記請求項24に記載のプログラムを記録したコンピュータ読取可能な記録媒体である。
よって、この記録媒体に記録したプログラムを用いて、補間処理、指標等の演算処理、生体状態の推定処理等を行うことができる。
【発明を実施するための最良の形態】
【0042】
次に、本発明の最良の形態(実施形態)について説明する。
[第1実施形態]
本実施形態では、自動車に搭載されてドライバの心拍間隔などを測定するとともに、その測定結果などに基づいてドライバの状態の評価を行う生体状態推定装置について説明する。
【0043】
a)まず、本実施形態の生体状態推定装置のシステム構成を、図1のブロック図に基づいて説明する。
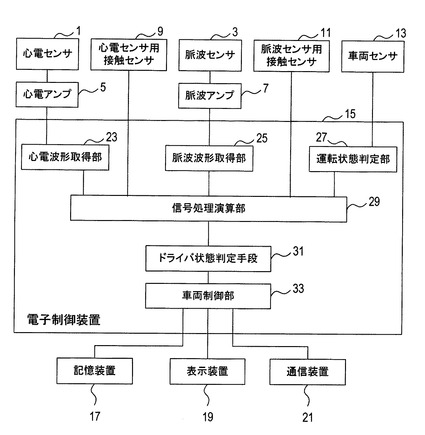
図1に示す様に、本実施形態の生体状態推定装置1は、心電センサ1と、脈波センサ3と、心電アンプ5と、脈波アンプ7と、心電センサ用接触センサ9と、脈波センサ用接触センサ11と、車両センサ13と、電子制御装置15と、記憶装置17と、表示装置19と、通信装置21とを備えている。
【0044】
このうち、前記電子制御装置15は、心電波形取得部23と、脈波波形取得部25と、運転状態判定部27と、信号処理演算部29と、ドライバ状態判定部31と、車両制御部33とを備えている。
【0045】
以下、各構成について説明する。
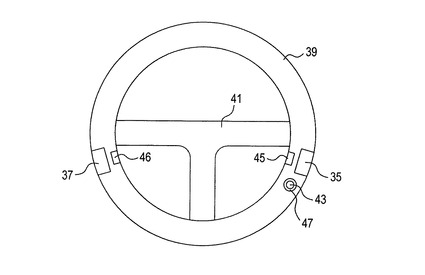
前記心電センサ1は、心電波形を取得するための心電波形取得手段であり、図2に示す様に、心電位を測定するための一対の電極35、37が、車両を操舵するためのステアリング39の表面に配置され、心電センサ1の本体(電気回路等:図示せず)がステアリング39の内部に埋め込まれている。ここで、電極35、37をステアリング39表面に配置するのは、運転者の左右の手のそれぞれに確実に電極35、37を接触させる様にするためである。この心電センサ1は、採取した心電波形に関する信号を心電アンプ5に送信する。なお、心電センサ1の本体は、ステアリングコラム41内部やダッシュボード(図示せず)内部に配置してもよい。
【0046】
前記脈波センサ3は、光電素子を用いて指の血流量から血圧や脈拍数を算出するための脈波波形取得手段であり、心電センサ1と同様に、運転者の指の腹の部分に(光の送受信を行う)測定部43を確実に接触させる様に、測定部43はステアリング39の表面に配置され、脈波センサ3の本体(電気回路等:図示せず)はステアリング39の内部に埋め込まれている。この脈波センサ3は、採取した脈拍および血圧に関する信号を脈波アンプ7に送信する。なお、脈波センサ3は、運転者の手首に巻きつける様に装着され圧電素子を用いて脈拍や血圧を測定する様にしてもよい。
【0047】
前記心電アンプ5及び脈波アンプ7は、それぞれ心電センサ1及び脈波センサ3から受信した信号を増幅するための装置である。この心電アンプ5及び脈波アンプ7は、増幅した信号を、それぞれ心電波形取得部23及び脈波波形取得部25に送信する。
【0048】
前記心電センサ用接触センサ9は、心電センサ1が皮膚に接触しているかどうかを識別するセンサ(例えば一対の電極を備えた接触インピーダンス計測センサ)であり、心電センサ1と一体もしくは併設されている。
【0049】
例えば右手用の接触インピーダンス計測センサの一方の確認用電極は、図2に示す様に、心電センサ1の一方の電極35と共用され、他方の確認用電極45は前記電極35と隣接して配置されている。この場合、右手がステアリングの右側の電極35及び確認用電極45に接触したときに、この電極35及び確認用電極45間のインピーダンスを求めることにより、右手が心電センサ1の一方の電極35に接触していると判断できる。同様に、左用の接触インピーダンス計測センサの一方の確認用電極は、心電センサ1の一方の電極37と共用され、他方の確認用電極46は前記電極37と隣接して配置されている。
【0050】
前記脈波センサ用接触センサ11は、脈波センサ3が皮膚に接触しているかどうかを識別するセンサ(例えば圧力センサ)であり、脈波センサ3と一体もしくは併設されている。例えば圧力センサの感圧部47は、脈波センサ3の測定部43に隣接して配置されている。
【0051】
前記車両センサ13は、例えば図示しない車速センサ、操舵角センサ、スロットル開度センサ、ブレーキセンサなど、車両の走行状態などの各種の車両状態を検出するセンサである。
【0052】
前記記憶装置17は、例えばハードディスク等からなり、測定した心拍間隔等の各種のデータを記憶する装置である。この記憶装置17では、車両制御部33にてデータ記憶が必要と判定された場合には、心電波形取得部6及び脈波波形取得部7にて取得した心電波形及び脈波波形、信号処理演算部29にて算出された心拍間隔及び心拍間隔の変動量を示す指標、ドライバ状態判定部31にて判定したドライバの状態推定結果等を記憶する。
【0053】
前記表示装置19は、LCD(Liquid Crystal Display)や有機EL(Electroluminescence)ディスプレイ等のナビゲーション装置に用いられる車載用表示装置である。この表示装置19は、後述する様に、心拍数やドライバの状態推定結果、その結果の信頼度などを表示する装置である。なお、場合によっては、車両を停車させるよう警告メッセージを画面に表示させたり、付属のスピーカから音声メッセージを発したり、或いは、LED(Light Emitting Diode)等の警告ランプを点滅させたりする。
【0054】
前記通信装置21は、外部との通信を行うための装置であり、電子制御装置15からの指令により、医療機関や救急等の予め登録された連絡先に警報を発したり、車両の位置情報を伝達したりするために使用される。
【0055】
b)次に、前記電子制御装置15について説明する。
電子制御装置15は、周知のマイクロコンピュータを主要部とする制御装置であり、心電センサ1、脈波センサ3、及び車両センサ13などからの信号を入力し、その信号を、前記心電波形取得部23、脈波波形取得部25、運転状態判定部27、信号処理演算部29、及びドライバ状態判定部31にて処理し、その処理結果に応じて、記憶装置17、表示装置19、及び通信装置21に対して制御信号を出力する。
【0056】
以下、電子制御装置15の各機能について説明する。
前記心電波形取得部23では、心電アンプ5により増幅された心電波形を取得し、同様に、脈波波形取得部25では、脈波アンプ7により増幅された脈波波形を取得する。
【0057】
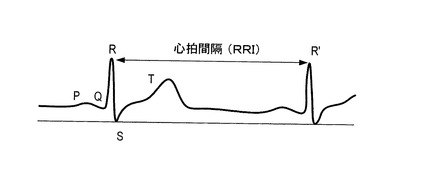
ここで心電波形(心電図波形)について、図3に基づいて説明する。
心電波形は、主に、心房の電気的興奮を反映するP波と、心室の電気的興奮を反映するQ波、R波、及びS波(以下、「QRS群」という。)と、興奮した心室の心筋細胞が再分極する過程を反映するT波とから構成されている。
【0058】
このうち、R波の波高(電位差)が最も大きく、筋電位等のノイズに対して最も頑健であるといえる。次に波高が大きいのがT波であり、P波が最も小さい波高を有する。心電波形のうち、R波ピークとR波ピークの間隔を心拍間隔(RRI)と呼び、心拍間隔の逆数に60を乗じて心拍数が算出できる。
【0059】
更に、心拍間隔の変動量から、人の状態評価が可能となる。この心拍間隔の変動量を示す指標として、例えば、心拍間隔を周波数解析することで自律神経活動量を評価できるといわれている。具体的には、高周波成分HF(0.15〜0.4Hz)が副交感神経活動量を反映し、低周波成分LF(0.04〜0.15Hz)と高周波成分との比(LF/HF)が交感神経活動量を反映するといわれている。また、任意時間帯における心拍間隔の標準偏差SD、さらにそれを心拍間隔の平均値で規格化する下記の変動係数CVrrという指標なども使われている。
CVrr=任意時間帯における心拍間隔のSD/任意時間帯における心拍間隔の平均
前記車両状態判定部27では、車両センサ13からの信号を受信して、車両が停車中であるか、一定速度で走行中であるか、加速若しくは減速中であるか、または、カーブ若しくは曲がり角等を通過中であるか(つまりステアリング34をきっているか)等を判定する。
【0060】
この車両状態判定部27における判定結果は、信号処理演算部29に送信され、後述するドライバの心電、脈波に基づいた状態推定などに反映する。例えば、車両停車中は、運転者が安静状態になり易く筋電位等のノイズが少なくなるが、走行中やステアリング操作中は、ノイズも増加するために、その考慮が必要となる。
【0061】
前記信号処理演算部29は、後に詳述する様に、心電波形取得部23で取得した心電波形、脈波波形取得部25で取得した脈波波形などに基づいて、心拍間隔を補正するとともに、心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標を算出する。この信号処理演算部29にて算出された結果は、ドライバ状態推定部31に出力される。
【0062】
前記ドライバ状態推定部31では、信号処理演算部29にて算出した補間処理後の心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標から、ドライバの状態を推定する。例えば、ドライバの体調であったり眠気であったり、ドライバが運転に適した状態かを推定する。なお、この推定方法については、例えば特開2005−312653号公報に記載の心拍間隔の標準偏差の大きさを用いる等の周知の手法を採用できる。このドライバ状態判定部31にて判定されたドライバの状態推定結果は、車両制御部33に送信される。
【0063】
前記車両制御部33では、ドライバ状態推定部31の推定結果に基づいて、ドライバ、同乗者、車両などへ、どのようなアクションを起こすかを決定する。そして、その決定に応じた制御信号は、記憶装置17、表示装置19、通信装置21に出力される。
【0064】
この他、車両制御部33は、例えば、ドライバの状態が運転するには危険と判定した場合は、ドライバの車両操作を支援するよう自動的に段階的ブレーキをかけ、車両を安全に停車されたり、周囲の車両に注意を促すために、ハザードランプを点滅させてもよい。
【0065】
c)次に、本実施形態における特徴的な処理の概要について説明する。
<心拍間隔の補間処理>
図3に示す心電波形のR波検出には、元波形もしくは微分波形から最大ピークを求める方法があり、また、特開2007−301101号公報で示すようなテンプレートから求める方法がある。
【0066】
しかし、ここで問題となるのが心電波形の検出精度である。
つまり、心電センサ1が採取する心電波形は、車両が停車中の場合や一定速度で直進走行している場合等、運転者が安静状態にある場合には、運転者の体動も比較的小さく、運転者の手とステアリング39表面の電極35、37との接触圧も一定になり易いので、心電波形が比較的安定する傾向にある。しかし、心電センサ1が採取する心電波形は、運転者の体動による筋電位等の影響を受け易く、車両が加速中、減速中またはカーブ走行中の場合等には、運転者の体動も比較的大きく、運転者の手とステアリング39表面の電極35、37との接触圧が変化し易いので、心電波形は乱れ易い傾向にある。また、心電センサ1は、運転者がステアリング39を操作する際、片手をステアリング39から離したりすると、その間、心電波形を採取できなくなる。
【0067】
一方、脈波センサ3が採取する脈波波形も、心電波形と同様に、運転者の体動によって乱れる傾向にある。しかし、心電波形とは、その計測原理や計測部位が異なることから、必ずしも波形の乱れが心電波形と同期しているわけではない。特に、前述した様に、心電波形は左手、右手の2点間の差動増幅で採取するが、脈波波形は1点での採取になるため、片手をステアリング39から離しても脈波波形が採取できる。
【0068】
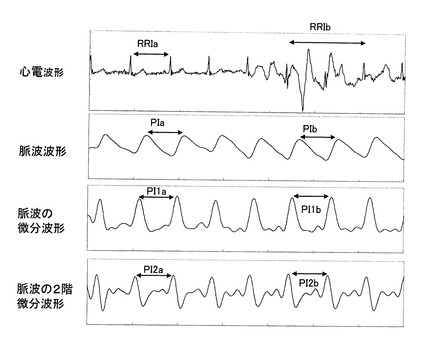
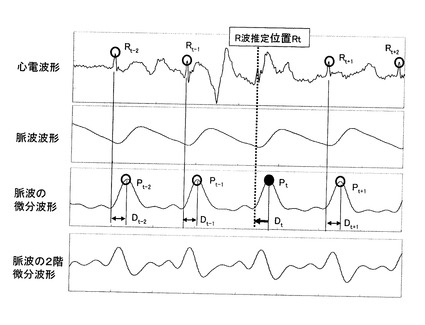
図4に、運転中に片手が一瞬浮いた時の心電波形と、脈波波形と、脈波の微分波形と、脈波の2階微分波形を示す。図4に示す様に、心電波形はノイズで乱れていても脈波波形は正常に採取できている時間帯が存在することが分かる。
【0069】
また、脈波は心臓が拍動するとほぼ同時に体中に伝わるので、心電波形と脈波波形は、末梢に伝導する分の位相差はあるが、ほぼ同じ周期で形成される。つまり、心電波形RRIa、脈波波形RIa、脈波の微分波形PI2a、脈波の2階微分波形PI3aはほぼ等価である。
【0070】
そこで、本実施形態では、脈波と心電を同時収集する構成において、心拍間隔の欠落部を脈波にて補間するのである。具体的には、心電波形のRRIbが前回と比べて異常に変動したとき、脈波波形のPIb、脈波の微分波形PI2b、脈波の2階微分波形PI3bの少なくとも1つにて補間する。
【0071】
例えば図5に示す様に、心拍間隔を脈拍間隔で補間することで、ほぼ正確な心拍間隔、またその変動量を示す指標を算出することができる。つまり、心拍間隔が同図の例えば6〜8秒の間において異常に大きくなった場合でも、それに対応する脈波間隔を心拍間隔として採用することにより、ほぼ正確な心拍間隔が得られる。
【0072】
詳しくは、心拍間隔と脈拍間隔とは、ほぼ1対1に対応しているので、脈拍間隔を用いて心拍間隔を補間する場合には、正確な心拍間隔が得られている期間のデータを利用して、本来正確な心拍間隔が得られると予想されるタイミングを、例えば心電R波位置と脈波特徴量の位置を比較する等の様にして決め、そのタイミングに対応した脈拍間隔をそのま心拍間隔として採用するのである。
【0073】
これにより、単純に従来技術(特開平6−22914号公報参照)の様に中間値で補正する場合よりも、心拍間隔の精度が向上する。
また、本実施形態は、心拍間隔の欠落部を脈拍間隔で補間するものであるが、例えば脈波センサ3が体と接触せず、脈波波形が検出できない時間帯も発生する。したがって、圧力センサなどで脈波センサ3と体との接触を判定し、非接触と判定した場合は、補間処理をしない。
<補間した心拍間隔を用いた信頼度等の処理>
前記ドライバ状態推定部31では、信号処理演算部29にて算出した補間処理後の心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標から、ドライバの状態を推定する。
【0074】
例えば、ドライバの体調(例えば不整脈の発生状態や血圧の状態)であったり眠気であったり、ドライバが運転に適した状態かを推定する。なお、心拍数や心拍間隔の変動量を示す指標からドライバの状態を推定する手法としては、周知の例えば特開2005−312653号公報に記載の技術を採用できる。
【0075】
この場合、心拍間隔の欠落部を脈拍間隔で補間処理した指標を、そのまま用いることも可能であるが、一層精度を上げることも考えられる。
つまり、心拍間隔と脈拍間隔はほぼ等価するものの、完全に1:1で対応するわけでなく、心臓から血管までの間における血圧や血管状態でその関係は変化するので、補間処理した指標をそのまま用いると、ドライバの状態推定結果に誤判定が生じるという可能性がある。
【0076】
そこで、本実施形態では、前述の補間方法とともに、心拍間隔の補間条件から、心拍数、心拍間隔の変動量を示す指標の信頼度を算出して表示し、更に、その信頼度に応じて、ドライバの状態判定の条件に反映する。
【0077】
ここで、信頼度について説明する。
前記信頼度とは、ドライバの状態を判断するデータ、例えば心拍数、心拍間隔の変動量を示す指標の信頼性の程度(レベル)を示すものであり、脈拍間隔の補間数や解析対象の時間帯における割合が多いほど、信頼度は低下するものとする。
【0078】
例えば、心拍間隔60データのうち、全体の10%である6データを脈拍間隔で補間した場合、信頼度90%とする。さらに、1点ずつ心拍間隔が欠落する場合よりも連続で欠落した場合の方が誤差が大きくなることから、補間の連続数が多いほど、信頼度は低下するものとする。例えば、10%のデータが1点ずつ欠落した場合を信頼度90%とすると、それらが連続して欠落している場合は、信頼度低下を2倍とし、信頼度80%とする。
【0079】
この様にして得られた信頼度を、補間処理後の心拍数、心拍間隔の変動量を示す指標とともにドライバ等へ表示することで、表示された数値全てを信用するような誤解を招くことを防止できる。なお、更に信頼度が低下する場合には、心電や脈波のセンサ接触が不良であることが考えられるため、ドライバへ警告、注意を報知する。
【0080】
また、この様にして得られた信頼度は、補間処理後の心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標とともに、ドライバの状態推定に反映する。
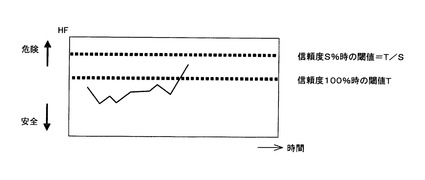
例えば、HFを用いてドライバが運転に適さない状態を判定する際、信頼度100%の場合には信頼性が高いことを想定して閾値を設定できるが、信頼性50%の場合は100%と同様の閾値を設定すると、ドライバの状態が通常状態にもかかわらず、異常状態であると誤判定を招く可能性も出てくる。したがって、例えば、信頼度が低い場合には、運転不適状態の判定閾値を上げることで、誤判定をしない様にする。
【0081】
ここで、図6に状態推定の閾値設定の例を示す。例えば、信頼度100%時の閾値をTと設定すると、信頼度S%時の閾値は、T/Sとして、信頼度が低くなるほど、閾値を上げて、危険と誤判定しにくくする。
【0082】
更に、前記閾値だけでなく、下記の様に、データの連続性から状態を判定してもよい。
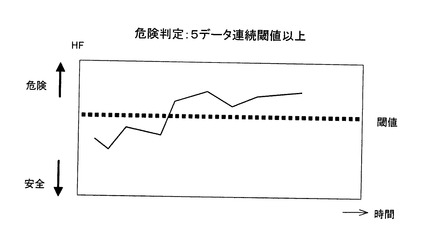
例えば、図7に示す様に、HFが所定の閾値よりも5データ連続で上回ったとき、危険と判定してもよい。しかし、5データ全てが信頼度100%でない場合には、状態判定結果の信頼性を欠くことになる。そこで、単純に連続データ数のみで判定せず、データ毎の信頼度で重み付けすることとする。例えば、信頼度100%のときを1、信頼度50%を0.5とし、判定条件をデータ数5ではなく、重み付けも含め5とする。これにより信頼度100%のときは、5データ連続で危険と判定し、信頼度50%のときは、1データ0.5のため、閾値を10データ連続で上回ったとき危険と判定する。
【0083】
そして、この様にして得られたドライバの状態推定結果をドライバへ表示する。
また、状態推定結果だけでなく、判定時の信頼度も同時に表示してもよい。
更に、状態推定の内容、運転操作への支障、個々の好みによって、常時表示せず必要なときだけ表示する方が望ましいことも考えられるため、信頼度が所定以上、例えば信頼度80%以上のみ、状態推定結果、信頼度を表示してもよい。なお、信頼度の低下を警告してもよい。
【0084】
d)次に、電子制御装置15にて行われる処理について、図8〜図10のフローチャートに基づいて説明する。
<メインルーチン>
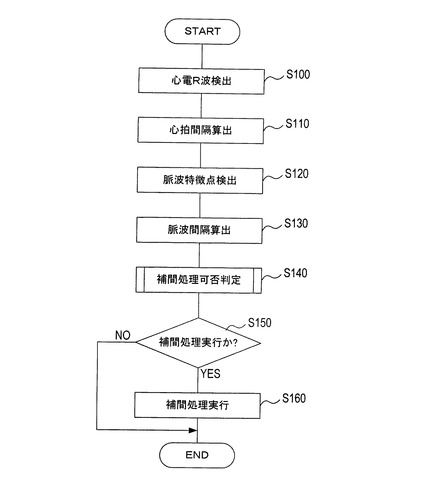
本処理は、心電波形及び脈波波形の取得から補間処理までを行うものである。
【0085】
図8のステップ(S)100では、心電センサ1によって得られた心電波形から、その心電R波を検出する。
続くステップ110では、心電R波のピーク間隔から、心拍間隔(RRI:図4のRRIa等)を算出する。
【0086】
続くステップ120では、脈波センサ3によって得られた脈波波形から、脈波特徴点を検出する。例えば前記図4に示す脈波波形からそのピーク(例えば周知の進行波のピークP1等)を求める。なお、図4の脈波の微分波形を用いる場合は、その特徴量(例えば速度脈波のa1等)を用いることができ、同様に、脈波の2階微分波形を用いる場合は、その特徴量(例えば加速度脈波のa等)を用いることができる。
【0087】
続くステップ130では、例えば脈波特徴点のピークの間隔(図4のPIa等)を算出する。
続くステップ140では、後述する補間処理を実施するか否か(即ち補間処理が必要で且つそれが可能か否か)の判定処理を行う。なお、補間処理を実施すると判定された場合には、例えばそれを示すフラグを設定する。
【0088】
続くステップ150では、補間処理を実行するか否かを、前記フラグが設定されているか否かによって判定する。ここで肯定判断されると、ステップ160に進み、一方否定判断されると一旦本処理を終了する。
【0089】
ステップ160では、上述した補間処理を実行する。すなわち、脈波センサ3によって得られた脈拍間隔を用いて、心電センサ1によって得られた心拍間隔を補間する処理を行い、一旦本処理を終了する。
<補間処理可否判定>
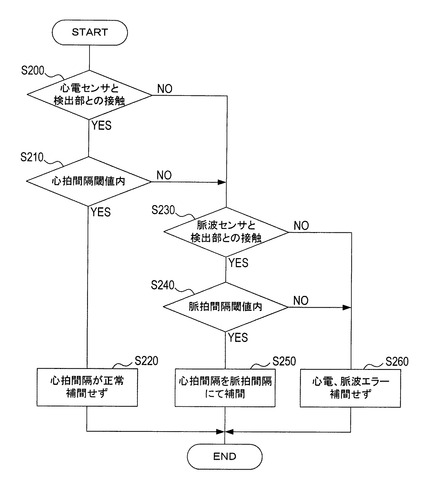
本処理は、前記ステップ140の補間処理の可否判定を行う処理である。
【0090】
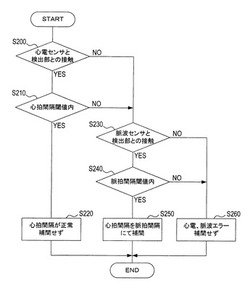
図9のステップ200では、心電センサ1とドライバの手(検出部)とが接触しているか否か(即ち心電センサ1から正確な信号が得られるか否か)を、心電センサ用接触センサ(接触インピーダンス計測センサ)9からの信号により判定し、ここで肯定判断されるとステップ210に進み、一方否定判断されるとステップ230に進む。
【0091】
つまり、例えば右手の場合、接触インピーダンス計測センサによって、その確認用電極45と心電センサ1の電極35とに人の手が触れていた場合に得られるインピーダンスと同様なインピーダンスが検出された場合には、心電センサ1の電極35にドライバの手が接触していると判断するのである。
【0092】
ステップ210では、心電波形から算出した心拍間隔が、所定の範囲内(心拍間隔が正常と判断できる範囲内)であるか否かを判定する。ここで肯定判断されるとステップ220に進み、一方否定判断されるとステップ230に進む。
【0093】
ステップ230では、心拍間隔が正常であるので、補正せず、その心拍間隔を、例えば記憶装置17に記憶したり、表示装置19に表示したり、通信装置21により外部に通信したりし、一旦本処理を終了する。
【0094】
一方、前記ステップ200で否定判断された場合(即ち心電センサ1との接触状態が適切でないと判断された場合)、或いは、前記ステップ210で否定判断された場合(即ち、心拍間隔のデータが異常であると判断された場合)には、ステップ230にて、脈波センサ3とドライバの手(検出部)とが接触しているか否かを判定する。即ち、脈波センサ3から正確な信号が得られるか否かを、脈波センサ用接触センサ(圧力センサ)11からの信号により判定し、ここで肯定判断されるとステップ240に進み、一方否定判断されるとステップ260に進む。
【0095】
つまり、例えば圧力センサによって、その感圧部47に人の手が触れていた場合に得られる圧力と同様な圧力が検出された場合には、脈波センサ3の測定部43にドライバの手が接触していると判断するのである。
【0096】
ステップ240では、脈波波形から算出した脈波間隔が、所定の範囲内(脈波間隔が正常と判断できる範囲内)であるか否かを判定する。ここで肯定判断されるとステップ250に進み、一方否定判断されるとステップ260に進む。
【0097】
ステップ250では、脈拍間隔が正常であるので、この脈拍間隔を用いて心拍間隔を補間し、その心拍間隔を、例えば記憶装置17に記憶したり、表示装置19に表示したり、通信装置21により外部に通信したりし、一旦本処理を終了する。
【0098】
一方、前記ステップ230で否定判断された場合(即ち脈波センサ3との接触状態が適切でないと判断された場合)、或いは、前記ステップ240で否定判断された場合(即ち、脈拍間隔のデータが異常であると判断された場合)には、ステップ260にて、心拍間隔及び脈波間隔ともエラーとして、補間処理を実施せず、一旦本処理を終了する。
<ドライバの状態判定>
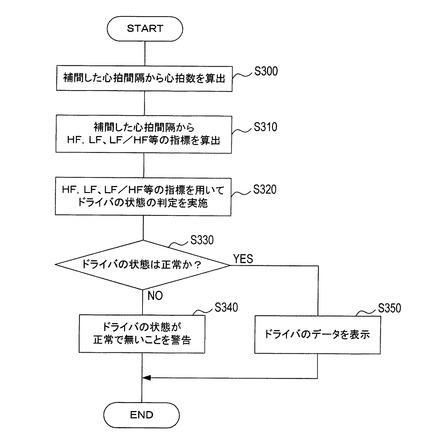
本処理は、補間処理によって得られた心拍間隔を用いて、心拍数や心拍間隔の変動量の指標を求め、それらに基づいてドライバの状態を推定する処理である。
【0099】
図10のステップ300では、補間した心拍間隔を用いて、心拍数(心拍間隔の逆数×60)を算出する。
続くステップ310では、心拍間隔の周波数解析を行って、LF、HF、LF/HF等の指標を算出する。
【0100】
続くステップ320では、上述した指標を用いて、例えば特開2007−301101等に示す様に、ドライバの状態(例えば不整脈や血圧の状態など)が、何らかの警告を必要とする状態か否か(即ち正常な状態では無いか否か)を判定する処理を行う。なお、判定処理の結果、ドライバの状態が正常ではないと判定された場合には、例えばそれを示すフラグを設定する。
【0101】
この判定を行う場合には、上述した様に、データの信頼度等を加味してドライバの状態を判定する。例えば補間の数、補間の連続数、補間の割合が多い場合には、データの信頼性が低いので、ドライバの状態を異常と判定する閾値を上げたり、逆に、データの重み付けを調節して、誤判定をしない様にする。更に、車両の走行状態によってもデータの信頼性が変化するので、例えばカーブを走行中や高速走行中の場合には、データの信頼度を低く設定してもよい。
【0102】
続くステップ330では、警告等の処理を実行するか否かを、前記フラグが設定されているか否かによって判定する。ここで肯定判断されると、ステップ340に進み、一方否定判断されるとステップ350に進む。
【0103】
ステップ340では、ドライバが正常な状態では無いと判定されたので、その内容に応じて、警報等を報知して、例えば表示装置19に表示したり音声等で報知して、一旦本処理を終了する。
【0104】
一方、ステップ350では、ドライバが正常な状態であるので、例えばその旨を表示したり、心拍数等のデータを表示装置19に表示して、一旦本処理を終了する。
e)この様に、本実施形態では、心電センサ1及び脈波センサ3からの信号を用いて、心電間隔及び脈波間隔を算出するとともに、心電間隔のデータが正常でない場合には、脈波間隔を用いて心電間隔を補間するので、常に精度の良いデータが得られるという顕著な効果を奏する。
【0105】
また、補間した心拍間隔から心拍数、LH、HF、LF/HF等のドライバの状態を判定する指標を算出するとともに、この指標を用いてドライバの状態を判定する際には、データの信頼度も考慮するので、ドライバの状態を誤判定する可能性が低いという利点がある。
[第2実施形態]
次に、第2実施形態について説明するが、前記第1実施形態と同様な内容の説明は省略する。
【0106】
図11に示す様に、心電波形と脈波波形(ここでは例えば脈波の微分波形)とには、時間的なズレがある。
本実施形態では、例えば前回の心電R波位置Rt-1と対応する(微分波形の)脈波特徴点位置Pt-1が検出できるとともに、欠落した心電R波に対応する今回の脈波特徴点位置Ptが検出できた場合は、今回の脈波特徴点位置Ptと、前回の脈波特徴点位置Pt-1と前回の心電R波位置Rt-1との時間差Dt-1から、今回の心電R波位置Ptを推定し、補間することができる。
【0107】
詳しくは、推定した今回の心電R波位置Ptは、今回の脈波特徴点位置Ptから、前回の脈波特徴点位置Pt-1と前回の心電R波位置Rt-1との時間差Dt-1を引くことにより求めることができる。
【0108】
本実施形態でも、前記第1実施形態と同様な効果を奏する。
以上、本実施形態では車両内のドライバを対象とした例について詳説したが、本発明は、上述した実施形態に制限されることはなく、本発明を逸脱しない範囲で、種々の変形及び置換を加えることができる。
【0109】
(1)ここで車両内のドライバを対象としたのは、車両内は、安定した心電計測が困難な状況が多く、本発明が特に生かされる用途であるためである。
また、車両状態、車両操作状況が、心電、脈波の取得性能に大きく影響するので、車両内にて本発明を実施する場合は、車速や操舵角等の車両情報を信頼度算出に反映することが好ましい。また、車両情報も組み合わせて、ドライバの状態を推定してもよい。
【0110】
例えば、ステアリング操作量が多いときなど、信頼度を低下させる。また、車両速度が速いほど、前述の推定判定の閾値を下げて、危険と判定し易くしてもよい。
(2)また、車両とは関係なく、既存の心電装置、脈波装置で同時に取得した心電波形、脈波波形をパーソナルコンピュータに読み込み、パーソナルコンピュータにて、測定対象の状態を判定してもよい。
【0111】
(3)更に、上述した生体状態推定装置の機能は、コンピュータのプログラムにより実行される処理により実現することができ、このプログラムは、記録媒体に記録できる。
つまり、上述した様なプログラムをコンピュータシステムにて実現する機能は、例えば、コンピュータシステム側で起動するプログラムとして備えることができる。このようなプログラムの場合、例えば、フレキシブルディスク、光磁気ディスク、CD−ROM、DVD、ハードディスク等のコンピュータ読み取り可能な記録媒体に記録し、必要に応じてコンピュータシステムにロードして起動することにより用いることができる。この他、ROMやバックアップRAM等をコンピュータ読み取り可能な記録媒体として前記プログラムを記録しておき、このROMあるいはバックアップRAM等をコンピュータシステムに組み込んで用いても良い。
【図面の簡単な説明】
【0112】
【図1】第1実施形態の生体状態推定装置の機能を示すブロック図である。
【図2】第1実施形態における各センサの配置を示す説明図である。
【図3】心電信号を示すグラフである。
【図4】心電波形、脈波波形、脈波の微分波形、脈波の2階微分波形の対応関係を示すグラフである。
【図5】脈拍間隔を用いて心拍間隔を補間する手法を示す説明図である。
【図6】信頼度に応じて閾値を変更する手法を示すグラフである。
【図7】連続するデータを用いた危険判定の手法を説明するグラフである。
【図8】第1実施形態におけるメインルーチンを示すフローチャートである。
【図9】心拍間隔の補間方法の処理を示すフローチャートである。
【図10】ドライバの状態を判定する処理を示すフローチャートである。
【図11】第2実施形態において、心電波形、脈波波形、脈波の微分波形、脈波の2階微分波形の関係を示すグラフである。
【符号の説明】
【0113】
1…心電センサ
3…脈波センサ
13…車両センサ
19…表示装置
29…信号処理演算部
31…ドライバ状態判定部
33…車両制御部
【技術分野】
【0001】
本発明は、例えば車両に搭載されてドライバ等の生体の状態を推定できる生体状態推定装置及びプログラム並びに記録媒体に関する。
【背景技術】
【0002】
従来より、運転中のドライバの状態を推定する方法として、ドライバの心拍数を測定し、その心拍数の変化からドライバの状態を判定する技術が提案されている(特許文献1参照)。この技術では、心電信号から心拍数を精度良く検出するために、心拍間隔の状態に基づいて心拍数のデータのチェックしている。
【0003】
またこれとは別に、医療分野において患者の状態を把握するために、患者の心拍数と心拍間隔とを求める場合、心電図の代替えとして脈波を用いる技術が提案されている(特許文献2参照)。この技術は、脈波センサによって得られた脈波R−R間隔を心拍間隔と等価とみなして、心拍間隔を求めるものである。
【特許文献1】特開平6−22914号公報
【特許文献2】特開平8−229013号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
心電信号は、皮膚に電極を貼り付けて、電極2点間での電位差を増幅することにより検出できるが、例えばステアリングの左右に電極を埋め込んだセンサによる計測の場合や、車内振動下での計測時などでは、心電波形が不安定となることがあり、心電R波と心電R波との時間間隔である心拍間隔、ひいては、そこから算出できる生体指標、例えば心拍数やゆらぎを示す心拍間隔の変動値などの算出が困難となるという問題も生ずる。
【0005】
このような場合、前記特許文献1の技術では、前後の正常な心拍間隔データの中間値で補間しているが、根拠のない補間値では誤差が発生するという問題がある。
また、前記特許文献2の技術においては、心電信号と脈波信号の位相差は、血圧や血管などユーザの状態により変化するため、脈拍間隔と心拍間隔は完全に1:1とはいえず、その誤差が考慮されていないという問題がある。つまり、日常、様々な環境下で計測する場合は、その差を考慮する必要があるが、現状では、脈拍間隔は単に心拍間隔の代替(置き換え)として使用されるだけであり、よって、その誤差を考慮することなく、心拍間隔の変動値を表示したり被験者の状態を推定することは適当でない。
【0006】
本発明は、上記問題点を解決するためになされたものであり、心拍間隔を精度良く検出できる生体状態推定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)請求項1の発明は、心電波形取得手段によって得られた生体の心電波形と、脈波波形取得手段によって得られた生体の脈波波形とに基づいて、生体の状態を推定する生体状態推定装置であって、前記心電波形が心拍を検出するのに適切でない状態であるか否かを判定する測定状態判定手段と、前記測定状態判定手段によって前記心電波形が心拍を検出するのに適切でない状態であると判定された場合には、前記脈波波形を用いて前記心電波形の補間を行う補間手段と、を備えたことを特徴とする。
【0008】
本発明では、心電波形が心拍を検出するのに適切でない状態であるか否かを判定し、心電波形が心拍を検出するのに適切でない状態であると判定された場合には、脈波波形を用いて心電波形の補間を行う。
【0009】
従って、心拍を検出するのに好ましい心電波形が得られない場合であっても、常に高い精度で心拍間隔を検出することができる。よって、この心拍間隔を用いて、心拍数や心拍間隔の変動量を示す指標などの算出ができるので、これらの指標等を用いて生体の状態を精度良く推定することができる。
【0010】
ここで、心電波形が心拍を検出するのに適切でない状態としては、例えばセンサの装着状態が不十分な場合(電極の非接触等)や、車両振動等によってノイズが発生する場合が挙げられる。つまり、この様な状態では、正確な心拍間隔を求めるのに必要な心電波形が得られないことがある。
【0011】
(2)請求項2の発明では、 前記測定状態判定手段は、前記心電波形取得手段と前記生体との接触状態又は前記脈波波形取得手段と前記生体との接触状態を検出する接触状態検出手段から信号に基づいて、心拍の検出に適した状態か否かを判定することを特徴とする。
【0012】
例えば心電センサの様な心電波形取得手段が生体に適正に装着されていない場合(例えば電極に接触していない場合)には、正確な心電波形が得られない。従って、心電波形取得手段と生体との接触状態を、例えば接触インピーダンスセンサの様な接触状態検出手段で検出することにより、心拍の検出に適した状態か否かを判定することができる。
【0013】
同様に、脈波センサの様な脈波波形取得手段が生体に適正に装着されていない場合(例えばセンサとの間に隙間がある場合)には、正確な脈波波形が得られない。従って、脈波波形取得手段と生体との接触状態を、例えば圧力センサの様な接触状態検出手段で検出することにより、脈拍の検出に適した状態か否かを判定することができる。
【0014】
(3)請求項3の発明では、前記測定状態判定手段は、心拍間隔が所定の許容範囲を外れたか否かによって、心拍の検出に適した状態か否かを判定することを特徴とする。
心拍間隔が通常ではありえない程度に過大な場合や過少な場合には、例えばセンサの装着ミスやノイズ等が原因である考えられるので、その様な場合には、心拍の検出に適した状態ではないと判定する。これにより、心拍の検出に適した状態か否かの状態判定を精度良く行うことができる。
【0015】
(4)請求項4の発明では、前記補間手段は、心拍間隔を脈拍間隔で補間することを特徴とする。
例えば心電センサによって得られた心拍間隔と例えば脈波センサによって得られた脈拍間隔とは、後述する図4に示す様に、完全ではないものの、ほぼ1:1の対応関係にあるので、精度の高い心電間隔が得られない期間は、脈波間隔を用いて補間することができる。
【0016】
(5)請求項5の発明では、前記補間手段は、脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点を用いて脈拍間隔を求め、該脈拍間隔を用いて心拍間隔を補間することを特徴とする。
【0017】
脈拍間隔は、脈拍毎の波形に繰り返して現れるピーク等を示す特徴点、即ち、脈波波形の特徴点(例えば周知の進行波のピークP1等)や、脈波の1階微分波形の特徴点(例えば速度脈波のa1等)や、波形の2階微分波形の特徴点(例えば加速度脈波のa等)を用いて算出することができる。
【0018】
(6)請求項6の発明では、前記補間手段は、心拍間隔に対応している最新の脈拍間隔を用いて、そのまま補間することを特徴とする。
本発明は、補間方法を例示したものである。本発明では、後述する図5に示す様に、精度の低い心拍間隔に対応している最新の脈拍間隔を用いて、そのまま補間する。これにより、簡易な手法で精度良く心拍間隔を補間することができる。
【0019】
(7)請求項7の発明では、
前記補間手段は、前回の心電R波と前回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点との時間差と、今回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点の位置とから、今回の心電R波位置を推定し、該推定した今回の心電R波位置と前回の心電R波との時間間隔を、心拍間隔として補間することを特徴とする。
【0020】
本発明は、補間方法を例示したものである。本発明では、後述する図11に示す様に、脈波波形のずれを考慮して心拍間隔を補間することができる。
(8)請求項8の発明では、前記補間した心拍間隔から、心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出することを特徴とする。
【0021】
本発明では、補間した心拍間隔を用いることにより、精度良く心拍数や心拍間隔の変動量を示す指標を算出することができる。
なお、心拍間隔の変動量を示す指標(いわゆる心拍数のゆらぎを示す指標)としては、例えば周知の(心拍数のゆらぎを周波数解析して得られる)ゆらぎの高周波成分(HF)、低周波成分(LF)、その成分の比(LF/HF)等が挙げられる。
【0022】
(9)請求項9の発明では、前記心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出する際に、前記補間の数、補間の連続数、及び補間の割合のうち少なくとも1種に応じて、データの信頼性を示す信頼度を算出することを特徴とする。
【0023】
補間が多いということは、好ましい心拍波形が得られていない状態であるので、データの信頼性を示すために、補間の状態に応じた信頼度を算出する。
ここで、補間の数とは、補間を行った回数のことであり、補間の連続数とは、補間を行った回数のうち補間が連続している数のことであり、補間の割合とは、所定期間における心拍数(又は脈波数)のうち補間を行った回数の割合のことである。
【0024】
(10)請求項10の発明では、前記信頼度は、前記補間の数、補間の連続数、及び補間の割合について、いずれも多いほど低下することを特徴とする。
補間の数が多いほど、補間を連続して行うほど、または、補間の割合が多いほどデータの信頼性が低いと考えられるので、本発明ではその様に設定している。
【0025】
(11)請求項11の発明では、前記心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち、少なくとも1種を表示することを特徴とする。
本発明では、心拍数や心拍間隔の変動量を示す指標や信頼度を、ディスプレイ等に表示する。なお、音声等で報知してもよい。
【0026】
(12)請求項12の発明は、前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち少なくとも2種から、ユーザの状態を判定することを特徴とする。
本発明は、ドライバ等の状態(例えば不整脈等の状態)を判定する場合は、心拍数や心拍間隔の変動量を示す指標や信頼度を用いるので、精度良く状態判定を行うことができる。
【0027】
(13)請求項13の発明は、前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定の閾値を切り換えることを特徴とする。
例えば信頼度が低い場合には、データの信頼性が低いのであるから、通常通りに心拍数や心拍間隔の変動量を示す指標による状態判定を行う場合に比べて、例えば異常と判定する基準を高くする(異常との判定をし難くする)ことにより、誤判定を防止することができる。
【0028】
(14)請求項14の発明では、前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定に用いるデータの重み付けを変えることを特徴とする。
判定に用いるデータには、信頼性の高いものと低いものがある。例えば補間の数が同じでも、それが連続した補間であるか否かで信頼性が異なる。よって、例えば信頼度が低い場合には、異常との判定をし難くする様にデータに重み付けすることにより、前記請求項13の発明と同様に、誤判定を防止することができる。
【0029】
(15)請求項15の発明では、前記ユーザの状態を判定する場合には、その判定結果及び前記信頼度のうち、少なくとも判定結果を表示する。
本発明では、判定結果や信頼度を例えばディスプレイに表示するので、ドライバ等はその表示から自身の状態を認識することができる。
【0030】
(16)請求項16の発明では、前記信頼度が所定以上の場合のみ、前記表示内容を表示することを特徴とする。
信頼度が低い場合、判定結果等を表示しても、ドライバ等に不安を与えるだけであるので、必要度が高いデータのみを表示する様にする。
【0031】
(17)請求項17の発明では、前記信頼度が低下した場合に、該信頼度低下に関する警告を行うことを特徴とする。
信頼度が低下した場合に警告を行うことにより、例えばドライバ等はセンサの装着状態等を確認することができる。
【0032】
(18)請求項18の発明では、前記脈波波形取得手段の装着状態が良いかどうかを、前記装着状態判定手段から判断し、良い場合のみ前記補間処理を実行することを特徴とする。
【0033】
例えば脈波センサの装着状態が悪い場合には、脈波センサから得られる脈波波形も精度が高いものではない。従って、脈波センサ等の装着状態が良い場合のみ脈波波形による補間を行うのである。
【0034】
(19)請求項19の発明では、前記生体状態の推定を、車両内におけるドライバに対して実行することを特徴とする。
本発明は、生体状態の推定対象を例示したものである。
【0035】
(20)請求項20の発明では、前記信頼度を、車両情報を組み合わせて算出することを特徴とする。
例えば車両がカーブを走行している場合や高速で走行している場合には、センサの装着状態が悪くなったりノイズが大きくなったりすることがある。従って、車両状態に対応して信頼度を設定することが望ましい。
【0036】
(21)請求項21の発明では、前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうちの少なくとも2種と、車両情報とから、前記ドライバの状態を判定することを特徴とする。
【0037】
上述した様に、車両の状態によってセンサ等から得られる信号の状態も変化するので、生体情報だけでなく、車両情報(例えば車速や操舵角)も加味してドライバの状態を判定することが好ましい。
【0038】
(22)請求項22の発明では、前記ドライバの状態を判定結果に基づいて、車両を制御することを特徴とする。
例えばドライバの状態が運転に好ましくない状態となった場合(例えば不整脈が発生した場合)などには、その旨を記憶したり、又はその旨を報知する(例えばディスプレイに表示又は音声等で報知)。また、車両の走行状態を制御する。具体的には、加速を禁止したり、徐々に速度を低下させたり、ハザードランプを点滅する制御等を実施してもよい。
【0039】
(23)請求項23の発明では、前記車両のナビゲーション装置を用いて、前記生体状態の推定結果及び警告内容の少なくとも一方を表示することを特徴とする。
ナビゲーション装置には、ディスプレイが装備されているので、このディスプレイを用いて判定結果や警告を表示する。なお、音声等で報知してもよい。
【0040】
(24)請求項24の発明は、前記請求項1〜23のいずれかに記載の生体状態推定装置の機能を実現させるためのプログラムである。
よって、マイクロコンピュータ等でこのプログラムを実施することにより、補間処理、指標等の演算処理、生体状態の推定処理等を行うことができる。
【0041】
(25)請求項25の発明は、前記請求項24に記載のプログラムを記録したコンピュータ読取可能な記録媒体である。
よって、この記録媒体に記録したプログラムを用いて、補間処理、指標等の演算処理、生体状態の推定処理等を行うことができる。
【発明を実施するための最良の形態】
【0042】
次に、本発明の最良の形態(実施形態)について説明する。
[第1実施形態]
本実施形態では、自動車に搭載されてドライバの心拍間隔などを測定するとともに、その測定結果などに基づいてドライバの状態の評価を行う生体状態推定装置について説明する。
【0043】
a)まず、本実施形態の生体状態推定装置のシステム構成を、図1のブロック図に基づいて説明する。
図1に示す様に、本実施形態の生体状態推定装置1は、心電センサ1と、脈波センサ3と、心電アンプ5と、脈波アンプ7と、心電センサ用接触センサ9と、脈波センサ用接触センサ11と、車両センサ13と、電子制御装置15と、記憶装置17と、表示装置19と、通信装置21とを備えている。
【0044】
このうち、前記電子制御装置15は、心電波形取得部23と、脈波波形取得部25と、運転状態判定部27と、信号処理演算部29と、ドライバ状態判定部31と、車両制御部33とを備えている。
【0045】
以下、各構成について説明する。
前記心電センサ1は、心電波形を取得するための心電波形取得手段であり、図2に示す様に、心電位を測定するための一対の電極35、37が、車両を操舵するためのステアリング39の表面に配置され、心電センサ1の本体(電気回路等:図示せず)がステアリング39の内部に埋め込まれている。ここで、電極35、37をステアリング39表面に配置するのは、運転者の左右の手のそれぞれに確実に電極35、37を接触させる様にするためである。この心電センサ1は、採取した心電波形に関する信号を心電アンプ5に送信する。なお、心電センサ1の本体は、ステアリングコラム41内部やダッシュボード(図示せず)内部に配置してもよい。
【0046】
前記脈波センサ3は、光電素子を用いて指の血流量から血圧や脈拍数を算出するための脈波波形取得手段であり、心電センサ1と同様に、運転者の指の腹の部分に(光の送受信を行う)測定部43を確実に接触させる様に、測定部43はステアリング39の表面に配置され、脈波センサ3の本体(電気回路等:図示せず)はステアリング39の内部に埋め込まれている。この脈波センサ3は、採取した脈拍および血圧に関する信号を脈波アンプ7に送信する。なお、脈波センサ3は、運転者の手首に巻きつける様に装着され圧電素子を用いて脈拍や血圧を測定する様にしてもよい。
【0047】
前記心電アンプ5及び脈波アンプ7は、それぞれ心電センサ1及び脈波センサ3から受信した信号を増幅するための装置である。この心電アンプ5及び脈波アンプ7は、増幅した信号を、それぞれ心電波形取得部23及び脈波波形取得部25に送信する。
【0048】
前記心電センサ用接触センサ9は、心電センサ1が皮膚に接触しているかどうかを識別するセンサ(例えば一対の電極を備えた接触インピーダンス計測センサ)であり、心電センサ1と一体もしくは併設されている。
【0049】
例えば右手用の接触インピーダンス計測センサの一方の確認用電極は、図2に示す様に、心電センサ1の一方の電極35と共用され、他方の確認用電極45は前記電極35と隣接して配置されている。この場合、右手がステアリングの右側の電極35及び確認用電極45に接触したときに、この電極35及び確認用電極45間のインピーダンスを求めることにより、右手が心電センサ1の一方の電極35に接触していると判断できる。同様に、左用の接触インピーダンス計測センサの一方の確認用電極は、心電センサ1の一方の電極37と共用され、他方の確認用電極46は前記電極37と隣接して配置されている。
【0050】
前記脈波センサ用接触センサ11は、脈波センサ3が皮膚に接触しているかどうかを識別するセンサ(例えば圧力センサ)であり、脈波センサ3と一体もしくは併設されている。例えば圧力センサの感圧部47は、脈波センサ3の測定部43に隣接して配置されている。
【0051】
前記車両センサ13は、例えば図示しない車速センサ、操舵角センサ、スロットル開度センサ、ブレーキセンサなど、車両の走行状態などの各種の車両状態を検出するセンサである。
【0052】
前記記憶装置17は、例えばハードディスク等からなり、測定した心拍間隔等の各種のデータを記憶する装置である。この記憶装置17では、車両制御部33にてデータ記憶が必要と判定された場合には、心電波形取得部6及び脈波波形取得部7にて取得した心電波形及び脈波波形、信号処理演算部29にて算出された心拍間隔及び心拍間隔の変動量を示す指標、ドライバ状態判定部31にて判定したドライバの状態推定結果等を記憶する。
【0053】
前記表示装置19は、LCD(Liquid Crystal Display)や有機EL(Electroluminescence)ディスプレイ等のナビゲーション装置に用いられる車載用表示装置である。この表示装置19は、後述する様に、心拍数やドライバの状態推定結果、その結果の信頼度などを表示する装置である。なお、場合によっては、車両を停車させるよう警告メッセージを画面に表示させたり、付属のスピーカから音声メッセージを発したり、或いは、LED(Light Emitting Diode)等の警告ランプを点滅させたりする。
【0054】
前記通信装置21は、外部との通信を行うための装置であり、電子制御装置15からの指令により、医療機関や救急等の予め登録された連絡先に警報を発したり、車両の位置情報を伝達したりするために使用される。
【0055】
b)次に、前記電子制御装置15について説明する。
電子制御装置15は、周知のマイクロコンピュータを主要部とする制御装置であり、心電センサ1、脈波センサ3、及び車両センサ13などからの信号を入力し、その信号を、前記心電波形取得部23、脈波波形取得部25、運転状態判定部27、信号処理演算部29、及びドライバ状態判定部31にて処理し、その処理結果に応じて、記憶装置17、表示装置19、及び通信装置21に対して制御信号を出力する。
【0056】
以下、電子制御装置15の各機能について説明する。
前記心電波形取得部23では、心電アンプ5により増幅された心電波形を取得し、同様に、脈波波形取得部25では、脈波アンプ7により増幅された脈波波形を取得する。
【0057】
ここで心電波形(心電図波形)について、図3に基づいて説明する。
心電波形は、主に、心房の電気的興奮を反映するP波と、心室の電気的興奮を反映するQ波、R波、及びS波(以下、「QRS群」という。)と、興奮した心室の心筋細胞が再分極する過程を反映するT波とから構成されている。
【0058】
このうち、R波の波高(電位差)が最も大きく、筋電位等のノイズに対して最も頑健であるといえる。次に波高が大きいのがT波であり、P波が最も小さい波高を有する。心電波形のうち、R波ピークとR波ピークの間隔を心拍間隔(RRI)と呼び、心拍間隔の逆数に60を乗じて心拍数が算出できる。
【0059】
更に、心拍間隔の変動量から、人の状態評価が可能となる。この心拍間隔の変動量を示す指標として、例えば、心拍間隔を周波数解析することで自律神経活動量を評価できるといわれている。具体的には、高周波成分HF(0.15〜0.4Hz)が副交感神経活動量を反映し、低周波成分LF(0.04〜0.15Hz)と高周波成分との比(LF/HF)が交感神経活動量を反映するといわれている。また、任意時間帯における心拍間隔の標準偏差SD、さらにそれを心拍間隔の平均値で規格化する下記の変動係数CVrrという指標なども使われている。
CVrr=任意時間帯における心拍間隔のSD/任意時間帯における心拍間隔の平均
前記車両状態判定部27では、車両センサ13からの信号を受信して、車両が停車中であるか、一定速度で走行中であるか、加速若しくは減速中であるか、または、カーブ若しくは曲がり角等を通過中であるか(つまりステアリング34をきっているか)等を判定する。
【0060】
この車両状態判定部27における判定結果は、信号処理演算部29に送信され、後述するドライバの心電、脈波に基づいた状態推定などに反映する。例えば、車両停車中は、運転者が安静状態になり易く筋電位等のノイズが少なくなるが、走行中やステアリング操作中は、ノイズも増加するために、その考慮が必要となる。
【0061】
前記信号処理演算部29は、後に詳述する様に、心電波形取得部23で取得した心電波形、脈波波形取得部25で取得した脈波波形などに基づいて、心拍間隔を補正するとともに、心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標を算出する。この信号処理演算部29にて算出された結果は、ドライバ状態推定部31に出力される。
【0062】
前記ドライバ状態推定部31では、信号処理演算部29にて算出した補間処理後の心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標から、ドライバの状態を推定する。例えば、ドライバの体調であったり眠気であったり、ドライバが運転に適した状態かを推定する。なお、この推定方法については、例えば特開2005−312653号公報に記載の心拍間隔の標準偏差の大きさを用いる等の周知の手法を採用できる。このドライバ状態判定部31にて判定されたドライバの状態推定結果は、車両制御部33に送信される。
【0063】
前記車両制御部33では、ドライバ状態推定部31の推定結果に基づいて、ドライバ、同乗者、車両などへ、どのようなアクションを起こすかを決定する。そして、その決定に応じた制御信号は、記憶装置17、表示装置19、通信装置21に出力される。
【0064】
この他、車両制御部33は、例えば、ドライバの状態が運転するには危険と判定した場合は、ドライバの車両操作を支援するよう自動的に段階的ブレーキをかけ、車両を安全に停車されたり、周囲の車両に注意を促すために、ハザードランプを点滅させてもよい。
【0065】
c)次に、本実施形態における特徴的な処理の概要について説明する。
<心拍間隔の補間処理>
図3に示す心電波形のR波検出には、元波形もしくは微分波形から最大ピークを求める方法があり、また、特開2007−301101号公報で示すようなテンプレートから求める方法がある。
【0066】
しかし、ここで問題となるのが心電波形の検出精度である。
つまり、心電センサ1が採取する心電波形は、車両が停車中の場合や一定速度で直進走行している場合等、運転者が安静状態にある場合には、運転者の体動も比較的小さく、運転者の手とステアリング39表面の電極35、37との接触圧も一定になり易いので、心電波形が比較的安定する傾向にある。しかし、心電センサ1が採取する心電波形は、運転者の体動による筋電位等の影響を受け易く、車両が加速中、減速中またはカーブ走行中の場合等には、運転者の体動も比較的大きく、運転者の手とステアリング39表面の電極35、37との接触圧が変化し易いので、心電波形は乱れ易い傾向にある。また、心電センサ1は、運転者がステアリング39を操作する際、片手をステアリング39から離したりすると、その間、心電波形を採取できなくなる。
【0067】
一方、脈波センサ3が採取する脈波波形も、心電波形と同様に、運転者の体動によって乱れる傾向にある。しかし、心電波形とは、その計測原理や計測部位が異なることから、必ずしも波形の乱れが心電波形と同期しているわけではない。特に、前述した様に、心電波形は左手、右手の2点間の差動増幅で採取するが、脈波波形は1点での採取になるため、片手をステアリング39から離しても脈波波形が採取できる。
【0068】
図4に、運転中に片手が一瞬浮いた時の心電波形と、脈波波形と、脈波の微分波形と、脈波の2階微分波形を示す。図4に示す様に、心電波形はノイズで乱れていても脈波波形は正常に採取できている時間帯が存在することが分かる。
【0069】
また、脈波は心臓が拍動するとほぼ同時に体中に伝わるので、心電波形と脈波波形は、末梢に伝導する分の位相差はあるが、ほぼ同じ周期で形成される。つまり、心電波形RRIa、脈波波形RIa、脈波の微分波形PI2a、脈波の2階微分波形PI3aはほぼ等価である。
【0070】
そこで、本実施形態では、脈波と心電を同時収集する構成において、心拍間隔の欠落部を脈波にて補間するのである。具体的には、心電波形のRRIbが前回と比べて異常に変動したとき、脈波波形のPIb、脈波の微分波形PI2b、脈波の2階微分波形PI3bの少なくとも1つにて補間する。
【0071】
例えば図5に示す様に、心拍間隔を脈拍間隔で補間することで、ほぼ正確な心拍間隔、またその変動量を示す指標を算出することができる。つまり、心拍間隔が同図の例えば6〜8秒の間において異常に大きくなった場合でも、それに対応する脈波間隔を心拍間隔として採用することにより、ほぼ正確な心拍間隔が得られる。
【0072】
詳しくは、心拍間隔と脈拍間隔とは、ほぼ1対1に対応しているので、脈拍間隔を用いて心拍間隔を補間する場合には、正確な心拍間隔が得られている期間のデータを利用して、本来正確な心拍間隔が得られると予想されるタイミングを、例えば心電R波位置と脈波特徴量の位置を比較する等の様にして決め、そのタイミングに対応した脈拍間隔をそのま心拍間隔として採用するのである。
【0073】
これにより、単純に従来技術(特開平6−22914号公報参照)の様に中間値で補正する場合よりも、心拍間隔の精度が向上する。
また、本実施形態は、心拍間隔の欠落部を脈拍間隔で補間するものであるが、例えば脈波センサ3が体と接触せず、脈波波形が検出できない時間帯も発生する。したがって、圧力センサなどで脈波センサ3と体との接触を判定し、非接触と判定した場合は、補間処理をしない。
<補間した心拍間隔を用いた信頼度等の処理>
前記ドライバ状態推定部31では、信号処理演算部29にて算出した補間処理後の心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標から、ドライバの状態を推定する。
【0074】
例えば、ドライバの体調(例えば不整脈の発生状態や血圧の状態)であったり眠気であったり、ドライバが運転に適した状態かを推定する。なお、心拍数や心拍間隔の変動量を示す指標からドライバの状態を推定する手法としては、周知の例えば特開2005−312653号公報に記載の技術を採用できる。
【0075】
この場合、心拍間隔の欠落部を脈拍間隔で補間処理した指標を、そのまま用いることも可能であるが、一層精度を上げることも考えられる。
つまり、心拍間隔と脈拍間隔はほぼ等価するものの、完全に1:1で対応するわけでなく、心臓から血管までの間における血圧や血管状態でその関係は変化するので、補間処理した指標をそのまま用いると、ドライバの状態推定結果に誤判定が生じるという可能性がある。
【0076】
そこで、本実施形態では、前述の補間方法とともに、心拍間隔の補間条件から、心拍数、心拍間隔の変動量を示す指標の信頼度を算出して表示し、更に、その信頼度に応じて、ドライバの状態判定の条件に反映する。
【0077】
ここで、信頼度について説明する。
前記信頼度とは、ドライバの状態を判断するデータ、例えば心拍数、心拍間隔の変動量を示す指標の信頼性の程度(レベル)を示すものであり、脈拍間隔の補間数や解析対象の時間帯における割合が多いほど、信頼度は低下するものとする。
【0078】
例えば、心拍間隔60データのうち、全体の10%である6データを脈拍間隔で補間した場合、信頼度90%とする。さらに、1点ずつ心拍間隔が欠落する場合よりも連続で欠落した場合の方が誤差が大きくなることから、補間の連続数が多いほど、信頼度は低下するものとする。例えば、10%のデータが1点ずつ欠落した場合を信頼度90%とすると、それらが連続して欠落している場合は、信頼度低下を2倍とし、信頼度80%とする。
【0079】
この様にして得られた信頼度を、補間処理後の心拍数、心拍間隔の変動量を示す指標とともにドライバ等へ表示することで、表示された数値全てを信用するような誤解を招くことを防止できる。なお、更に信頼度が低下する場合には、心電や脈波のセンサ接触が不良であることが考えられるため、ドライバへ警告、注意を報知する。
【0080】
また、この様にして得られた信頼度は、補間処理後の心拍間隔、心拍数、HFなど心拍間隔の変動量を示す指標とともに、ドライバの状態推定に反映する。
例えば、HFを用いてドライバが運転に適さない状態を判定する際、信頼度100%の場合には信頼性が高いことを想定して閾値を設定できるが、信頼性50%の場合は100%と同様の閾値を設定すると、ドライバの状態が通常状態にもかかわらず、異常状態であると誤判定を招く可能性も出てくる。したがって、例えば、信頼度が低い場合には、運転不適状態の判定閾値を上げることで、誤判定をしない様にする。
【0081】
ここで、図6に状態推定の閾値設定の例を示す。例えば、信頼度100%時の閾値をTと設定すると、信頼度S%時の閾値は、T/Sとして、信頼度が低くなるほど、閾値を上げて、危険と誤判定しにくくする。
【0082】
更に、前記閾値だけでなく、下記の様に、データの連続性から状態を判定してもよい。
例えば、図7に示す様に、HFが所定の閾値よりも5データ連続で上回ったとき、危険と判定してもよい。しかし、5データ全てが信頼度100%でない場合には、状態判定結果の信頼性を欠くことになる。そこで、単純に連続データ数のみで判定せず、データ毎の信頼度で重み付けすることとする。例えば、信頼度100%のときを1、信頼度50%を0.5とし、判定条件をデータ数5ではなく、重み付けも含め5とする。これにより信頼度100%のときは、5データ連続で危険と判定し、信頼度50%のときは、1データ0.5のため、閾値を10データ連続で上回ったとき危険と判定する。
【0083】
そして、この様にして得られたドライバの状態推定結果をドライバへ表示する。
また、状態推定結果だけでなく、判定時の信頼度も同時に表示してもよい。
更に、状態推定の内容、運転操作への支障、個々の好みによって、常時表示せず必要なときだけ表示する方が望ましいことも考えられるため、信頼度が所定以上、例えば信頼度80%以上のみ、状態推定結果、信頼度を表示してもよい。なお、信頼度の低下を警告してもよい。
【0084】
d)次に、電子制御装置15にて行われる処理について、図8〜図10のフローチャートに基づいて説明する。
<メインルーチン>
本処理は、心電波形及び脈波波形の取得から補間処理までを行うものである。
【0085】
図8のステップ(S)100では、心電センサ1によって得られた心電波形から、その心電R波を検出する。
続くステップ110では、心電R波のピーク間隔から、心拍間隔(RRI:図4のRRIa等)を算出する。
【0086】
続くステップ120では、脈波センサ3によって得られた脈波波形から、脈波特徴点を検出する。例えば前記図4に示す脈波波形からそのピーク(例えば周知の進行波のピークP1等)を求める。なお、図4の脈波の微分波形を用いる場合は、その特徴量(例えば速度脈波のa1等)を用いることができ、同様に、脈波の2階微分波形を用いる場合は、その特徴量(例えば加速度脈波のa等)を用いることができる。
【0087】
続くステップ130では、例えば脈波特徴点のピークの間隔(図4のPIa等)を算出する。
続くステップ140では、後述する補間処理を実施するか否か(即ち補間処理が必要で且つそれが可能か否か)の判定処理を行う。なお、補間処理を実施すると判定された場合には、例えばそれを示すフラグを設定する。
【0088】
続くステップ150では、補間処理を実行するか否かを、前記フラグが設定されているか否かによって判定する。ここで肯定判断されると、ステップ160に進み、一方否定判断されると一旦本処理を終了する。
【0089】
ステップ160では、上述した補間処理を実行する。すなわち、脈波センサ3によって得られた脈拍間隔を用いて、心電センサ1によって得られた心拍間隔を補間する処理を行い、一旦本処理を終了する。
<補間処理可否判定>
本処理は、前記ステップ140の補間処理の可否判定を行う処理である。
【0090】
図9のステップ200では、心電センサ1とドライバの手(検出部)とが接触しているか否か(即ち心電センサ1から正確な信号が得られるか否か)を、心電センサ用接触センサ(接触インピーダンス計測センサ)9からの信号により判定し、ここで肯定判断されるとステップ210に進み、一方否定判断されるとステップ230に進む。
【0091】
つまり、例えば右手の場合、接触インピーダンス計測センサによって、その確認用電極45と心電センサ1の電極35とに人の手が触れていた場合に得られるインピーダンスと同様なインピーダンスが検出された場合には、心電センサ1の電極35にドライバの手が接触していると判断するのである。
【0092】
ステップ210では、心電波形から算出した心拍間隔が、所定の範囲内(心拍間隔が正常と判断できる範囲内)であるか否かを判定する。ここで肯定判断されるとステップ220に進み、一方否定判断されるとステップ230に進む。
【0093】
ステップ230では、心拍間隔が正常であるので、補正せず、その心拍間隔を、例えば記憶装置17に記憶したり、表示装置19に表示したり、通信装置21により外部に通信したりし、一旦本処理を終了する。
【0094】
一方、前記ステップ200で否定判断された場合(即ち心電センサ1との接触状態が適切でないと判断された場合)、或いは、前記ステップ210で否定判断された場合(即ち、心拍間隔のデータが異常であると判断された場合)には、ステップ230にて、脈波センサ3とドライバの手(検出部)とが接触しているか否かを判定する。即ち、脈波センサ3から正確な信号が得られるか否かを、脈波センサ用接触センサ(圧力センサ)11からの信号により判定し、ここで肯定判断されるとステップ240に進み、一方否定判断されるとステップ260に進む。
【0095】
つまり、例えば圧力センサによって、その感圧部47に人の手が触れていた場合に得られる圧力と同様な圧力が検出された場合には、脈波センサ3の測定部43にドライバの手が接触していると判断するのである。
【0096】
ステップ240では、脈波波形から算出した脈波間隔が、所定の範囲内(脈波間隔が正常と判断できる範囲内)であるか否かを判定する。ここで肯定判断されるとステップ250に進み、一方否定判断されるとステップ260に進む。
【0097】
ステップ250では、脈拍間隔が正常であるので、この脈拍間隔を用いて心拍間隔を補間し、その心拍間隔を、例えば記憶装置17に記憶したり、表示装置19に表示したり、通信装置21により外部に通信したりし、一旦本処理を終了する。
【0098】
一方、前記ステップ230で否定判断された場合(即ち脈波センサ3との接触状態が適切でないと判断された場合)、或いは、前記ステップ240で否定判断された場合(即ち、脈拍間隔のデータが異常であると判断された場合)には、ステップ260にて、心拍間隔及び脈波間隔ともエラーとして、補間処理を実施せず、一旦本処理を終了する。
<ドライバの状態判定>
本処理は、補間処理によって得られた心拍間隔を用いて、心拍数や心拍間隔の変動量の指標を求め、それらに基づいてドライバの状態を推定する処理である。
【0099】
図10のステップ300では、補間した心拍間隔を用いて、心拍数(心拍間隔の逆数×60)を算出する。
続くステップ310では、心拍間隔の周波数解析を行って、LF、HF、LF/HF等の指標を算出する。
【0100】
続くステップ320では、上述した指標を用いて、例えば特開2007−301101等に示す様に、ドライバの状態(例えば不整脈や血圧の状態など)が、何らかの警告を必要とする状態か否か(即ち正常な状態では無いか否か)を判定する処理を行う。なお、判定処理の結果、ドライバの状態が正常ではないと判定された場合には、例えばそれを示すフラグを設定する。
【0101】
この判定を行う場合には、上述した様に、データの信頼度等を加味してドライバの状態を判定する。例えば補間の数、補間の連続数、補間の割合が多い場合には、データの信頼性が低いので、ドライバの状態を異常と判定する閾値を上げたり、逆に、データの重み付けを調節して、誤判定をしない様にする。更に、車両の走行状態によってもデータの信頼性が変化するので、例えばカーブを走行中や高速走行中の場合には、データの信頼度を低く設定してもよい。
【0102】
続くステップ330では、警告等の処理を実行するか否かを、前記フラグが設定されているか否かによって判定する。ここで肯定判断されると、ステップ340に進み、一方否定判断されるとステップ350に進む。
【0103】
ステップ340では、ドライバが正常な状態では無いと判定されたので、その内容に応じて、警報等を報知して、例えば表示装置19に表示したり音声等で報知して、一旦本処理を終了する。
【0104】
一方、ステップ350では、ドライバが正常な状態であるので、例えばその旨を表示したり、心拍数等のデータを表示装置19に表示して、一旦本処理を終了する。
e)この様に、本実施形態では、心電センサ1及び脈波センサ3からの信号を用いて、心電間隔及び脈波間隔を算出するとともに、心電間隔のデータが正常でない場合には、脈波間隔を用いて心電間隔を補間するので、常に精度の良いデータが得られるという顕著な効果を奏する。
【0105】
また、補間した心拍間隔から心拍数、LH、HF、LF/HF等のドライバの状態を判定する指標を算出するとともに、この指標を用いてドライバの状態を判定する際には、データの信頼度も考慮するので、ドライバの状態を誤判定する可能性が低いという利点がある。
[第2実施形態]
次に、第2実施形態について説明するが、前記第1実施形態と同様な内容の説明は省略する。
【0106】
図11に示す様に、心電波形と脈波波形(ここでは例えば脈波の微分波形)とには、時間的なズレがある。
本実施形態では、例えば前回の心電R波位置Rt-1と対応する(微分波形の)脈波特徴点位置Pt-1が検出できるとともに、欠落した心電R波に対応する今回の脈波特徴点位置Ptが検出できた場合は、今回の脈波特徴点位置Ptと、前回の脈波特徴点位置Pt-1と前回の心電R波位置Rt-1との時間差Dt-1から、今回の心電R波位置Ptを推定し、補間することができる。
【0107】
詳しくは、推定した今回の心電R波位置Ptは、今回の脈波特徴点位置Ptから、前回の脈波特徴点位置Pt-1と前回の心電R波位置Rt-1との時間差Dt-1を引くことにより求めることができる。
【0108】
本実施形態でも、前記第1実施形態と同様な効果を奏する。
以上、本実施形態では車両内のドライバを対象とした例について詳説したが、本発明は、上述した実施形態に制限されることはなく、本発明を逸脱しない範囲で、種々の変形及び置換を加えることができる。
【0109】
(1)ここで車両内のドライバを対象としたのは、車両内は、安定した心電計測が困難な状況が多く、本発明が特に生かされる用途であるためである。
また、車両状態、車両操作状況が、心電、脈波の取得性能に大きく影響するので、車両内にて本発明を実施する場合は、車速や操舵角等の車両情報を信頼度算出に反映することが好ましい。また、車両情報も組み合わせて、ドライバの状態を推定してもよい。
【0110】
例えば、ステアリング操作量が多いときなど、信頼度を低下させる。また、車両速度が速いほど、前述の推定判定の閾値を下げて、危険と判定し易くしてもよい。
(2)また、車両とは関係なく、既存の心電装置、脈波装置で同時に取得した心電波形、脈波波形をパーソナルコンピュータに読み込み、パーソナルコンピュータにて、測定対象の状態を判定してもよい。
【0111】
(3)更に、上述した生体状態推定装置の機能は、コンピュータのプログラムにより実行される処理により実現することができ、このプログラムは、記録媒体に記録できる。
つまり、上述した様なプログラムをコンピュータシステムにて実現する機能は、例えば、コンピュータシステム側で起動するプログラムとして備えることができる。このようなプログラムの場合、例えば、フレキシブルディスク、光磁気ディスク、CD−ROM、DVD、ハードディスク等のコンピュータ読み取り可能な記録媒体に記録し、必要に応じてコンピュータシステムにロードして起動することにより用いることができる。この他、ROMやバックアップRAM等をコンピュータ読み取り可能な記録媒体として前記プログラムを記録しておき、このROMあるいはバックアップRAM等をコンピュータシステムに組み込んで用いても良い。
【図面の簡単な説明】
【0112】
【図1】第1実施形態の生体状態推定装置の機能を示すブロック図である。
【図2】第1実施形態における各センサの配置を示す説明図である。
【図3】心電信号を示すグラフである。
【図4】心電波形、脈波波形、脈波の微分波形、脈波の2階微分波形の対応関係を示すグラフである。
【図5】脈拍間隔を用いて心拍間隔を補間する手法を示す説明図である。
【図6】信頼度に応じて閾値を変更する手法を示すグラフである。
【図7】連続するデータを用いた危険判定の手法を説明するグラフである。
【図8】第1実施形態におけるメインルーチンを示すフローチャートである。
【図9】心拍間隔の補間方法の処理を示すフローチャートである。
【図10】ドライバの状態を判定する処理を示すフローチャートである。
【図11】第2実施形態において、心電波形、脈波波形、脈波の微分波形、脈波の2階微分波形の関係を示すグラフである。
【符号の説明】
【0113】
1…心電センサ
3…脈波センサ
13…車両センサ
19…表示装置
29…信号処理演算部
31…ドライバ状態判定部
33…車両制御部
【特許請求の範囲】
【請求項1】
心電波形取得手段によって得られた生体の心電波形と、脈波波形取得手段によって得られた生体の脈波波形とに基づいて、生体の状態を推定する生体状態推定装置であって、
前記心電波形が心拍を検出するのに適切でない状態であるか否かを判定する測定状態判定手段と、
前記測定状態判定手段によって前記心電波形が心拍を検出するのに適切でない状態であると判定された場合には、前記脈波波形を用いて前記心電波形の補間を行う補間手段と、
を備えたことを特徴とする生体状態推定装置。
【請求項2】
前記測定状態判定手段は、前記心電波形取得手段と前記生体との接触状態又は前記脈波波形取得手段と前記生体との接触状態を検出する接触状態検出手段から信号に基づいて、心拍の検出に適した状態か否かを判定することを特徴とする請求項1に記載の生体状態推定装置。
【請求項3】
前記測定状態判定手段は、心拍間隔が所定の許容範囲を外れたか否かによって、心拍の検出に適した状態か否かを判定することを特徴とする請求項1又は2に記載の生体状態推定装置。
【請求項4】
前記補間手段は、心拍間隔を脈拍間隔で補間することを特徴とする請求項1〜3のいずれかに記載の生体状態推定装置。
【請求項5】
前記補間手段は、脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点を用いて脈拍間隔を求め、該脈拍間隔を用いて心拍間隔を補間することを特徴とする請求項4に記載の生体状態推定装置。
【請求項6】
前記補間手段は、心拍間隔に対応している最新の脈拍間隔を用いて、そのまま補間することを特徴とする請求項4又は5に記載の生体状態推定装置。
【請求項7】
前記補間手段は、前回の心電R波と前回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点との時間差と、今回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点の位置とから、今回の心電R波位置を推定し、該推定した今回の心電R波位置と前回の心電R波との時間間隔を、心拍間隔として補間することを特徴とする請求項4又は5に記載の生体状態推定装置。
【請求項8】
前記補間した心拍間隔から、心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出することを特徴とする請求項1〜7のいずれかに記載の生体状態推定装置。
【請求項9】
前記心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出する際に、前記補間の数、補間の連続数、及び補間の割合のうち少なくとも1種に応じて、データの信頼性を示す信頼度を算出することを特徴とする請求項8に記載の生体状態推定装置。
【請求項10】
前記信頼度は、前記補間の数、補間の連続数、及び補間の割合について、いずれも多いほど低下することを特徴とする請求項8又は9に記載の生体状態推定装置。
【請求項11】
前記心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち、少なくとも1種を表示することを特徴とする請求項8〜10のいずれかに記載の生体状態推定装置。
【請求項12】
前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち少なくとも2種から、ユーザの状態を判定することを特徴とする請求項8〜11のいずれかに記載の生体状態推定装置。
【請求項13】
前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定の閾値を切り換えることを特徴とする請求項12に記載の生体状態推定装置。
【請求項14】
前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定に用いるデータの重み付けを変えることを特徴とする請求項12に記載の生体状態推定装置。
【請求項15】
前記ユーザの状態を判定する場合には、その判定結果及び前記信頼度のうち、少なくとも判定結果を表示することを特徴とする請求項12〜14のいずれかに記載の生体状態推定装置。
【請求項16】
前記信頼度が所定以上の場合のみ、前記表示内容を表示することを特徴とする請求項9〜15のいずれかに記載の生体状態推定装置。
【請求項17】
前記信頼度が低下した場合に、該信頼度低下に関する警告を行うことを特徴とする請求項9〜16のいずれかに記載の生体状態推定装置。
【請求項18】
前記脈波波形取得手段の装着状態が良いかどうかを、前記装着状態判定手段から判断し、良い場合のみ前記補間処理を実行することを特徴とする請求項2〜17のいずれかに記載の生体状態推定装置。
【請求項19】
前記生体状態の推定を、車両内におけるドライバに対して実行することを特徴とする請求項1〜18のいずれかに記載の生体状態推定装置。
【請求項20】
前記信頼度を、車両情報を組み合わせて算出することを特徴とする請求項19に記載の生体状態推定装置。
【請求項21】
前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうちの少なくとも2種と、車両情報とから、前記ドライバの状態を判定することを特徴とする請求項20に記載の生体状態推定装置。
【請求項22】
前記ドライバの状態を判定結果に基づいて、車両を制御することを特徴とする請求項21に記載の生体状態推定装置。
【請求項23】
前記車両のナビゲーション装置を用いて、前記生体状態の推定結果及び警告内容の少なくとも一方を表示することを特徴とする請求項19〜22のいずれかに記載の生体状態推定装置。
【請求項24】
コンピュータを、前記請求項1〜23のいずれかに記載の測定状態判定手段及び補間手段として機能させるためのプログラム。
【請求項25】
前記請求項24に記載のプログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項1】
心電波形取得手段によって得られた生体の心電波形と、脈波波形取得手段によって得られた生体の脈波波形とに基づいて、生体の状態を推定する生体状態推定装置であって、
前記心電波形が心拍を検出するのに適切でない状態であるか否かを判定する測定状態判定手段と、
前記測定状態判定手段によって前記心電波形が心拍を検出するのに適切でない状態であると判定された場合には、前記脈波波形を用いて前記心電波形の補間を行う補間手段と、
を備えたことを特徴とする生体状態推定装置。
【請求項2】
前記測定状態判定手段は、前記心電波形取得手段と前記生体との接触状態又は前記脈波波形取得手段と前記生体との接触状態を検出する接触状態検出手段から信号に基づいて、心拍の検出に適した状態か否かを判定することを特徴とする請求項1に記載の生体状態推定装置。
【請求項3】
前記測定状態判定手段は、心拍間隔が所定の許容範囲を外れたか否かによって、心拍の検出に適した状態か否かを判定することを特徴とする請求項1又は2に記載の生体状態推定装置。
【請求項4】
前記補間手段は、心拍間隔を脈拍間隔で補間することを特徴とする請求項1〜3のいずれかに記載の生体状態推定装置。
【請求項5】
前記補間手段は、脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点を用いて脈拍間隔を求め、該脈拍間隔を用いて心拍間隔を補間することを特徴とする請求項4に記載の生体状態推定装置。
【請求項6】
前記補間手段は、心拍間隔に対応している最新の脈拍間隔を用いて、そのまま補間することを特徴とする請求項4又は5に記載の生体状態推定装置。
【請求項7】
前記補間手段は、前回の心電R波と前回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点との時間差と、今回の脈波波形、脈波の1階微分波形、及び波形の2階微分波形のいずれかの特徴点の位置とから、今回の心電R波位置を推定し、該推定した今回の心電R波位置と前回の心電R波との時間間隔を、心拍間隔として補間することを特徴とする請求項4又は5に記載の生体状態推定装置。
【請求項8】
前記補間した心拍間隔から、心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出することを特徴とする請求項1〜7のいずれかに記載の生体状態推定装置。
【請求項9】
前記心拍数及び心拍間隔の変動量を示す指標のうち少なくとも一方を算出する際に、前記補間の数、補間の連続数、及び補間の割合のうち少なくとも1種に応じて、データの信頼性を示す信頼度を算出することを特徴とする請求項8に記載の生体状態推定装置。
【請求項10】
前記信頼度は、前記補間の数、補間の連続数、及び補間の割合について、いずれも多いほど低下することを特徴とする請求項8又は9に記載の生体状態推定装置。
【請求項11】
前記心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち、少なくとも1種を表示することを特徴とする請求項8〜10のいずれかに記載の生体状態推定装置。
【請求項12】
前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうち少なくとも2種から、ユーザの状態を判定することを特徴とする請求項8〜11のいずれかに記載の生体状態推定装置。
【請求項13】
前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定の閾値を切り換えることを特徴とする請求項12に記載の生体状態推定装置。
【請求項14】
前記ユーザの状態を判定する場合には、前記信頼度に応じて、判定に用いるデータの重み付けを変えることを特徴とする請求項12に記載の生体状態推定装置。
【請求項15】
前記ユーザの状態を判定する場合には、その判定結果及び前記信頼度のうち、少なくとも判定結果を表示することを特徴とする請求項12〜14のいずれかに記載の生体状態推定装置。
【請求項16】
前記信頼度が所定以上の場合のみ、前記表示内容を表示することを特徴とする請求項9〜15のいずれかに記載の生体状態推定装置。
【請求項17】
前記信頼度が低下した場合に、該信頼度低下に関する警告を行うことを特徴とする請求項9〜16のいずれかに記載の生体状態推定装置。
【請求項18】
前記脈波波形取得手段の装着状態が良いかどうかを、前記装着状態判定手段から判断し、良い場合のみ前記補間処理を実行することを特徴とする請求項2〜17のいずれかに記載の生体状態推定装置。
【請求項19】
前記生体状態の推定を、車両内におけるドライバに対して実行することを特徴とする請求項1〜18のいずれかに記載の生体状態推定装置。
【請求項20】
前記信頼度を、車両情報を組み合わせて算出することを特徴とする請求項19に記載の生体状態推定装置。
【請求項21】
前記補間後の心拍数、心拍間隔の変動量を示す指標、及び信頼度のうちの少なくとも2種と、車両情報とから、前記ドライバの状態を判定することを特徴とする請求項20に記載の生体状態推定装置。
【請求項22】
前記ドライバの状態を判定結果に基づいて、車両を制御することを特徴とする請求項21に記載の生体状態推定装置。
【請求項23】
前記車両のナビゲーション装置を用いて、前記生体状態の推定結果及び警告内容の少なくとも一方を表示することを特徴とする請求項19〜22のいずれかに記載の生体状態推定装置。
【請求項24】
コンピュータを、前記請求項1〜23のいずれかに記載の測定状態判定手段及び補間手段として機能させるためのプログラム。
【請求項25】
前記請求項24に記載のプログラムを記録したコンピュータ読み取り可能な記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−261419(P2009−261419A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−110602(P2008−110602)
【出願日】平成20年4月21日(2008.4.21)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(803000034)学校法人日本医科大学 (37)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月21日(2008.4.21)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(803000034)学校法人日本医科大学 (37)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]