
生体組織の処置をシミュレーションするためのシミュレータ及び方法
実体ハンドルと、画面と、実体ハンドルの運動を検知する運動検知手段と、運動検知手段によって検知される実体ハンドルの運動に基づいて、仮想ハンドルが生体組織に対する位置関係において画面上で動かされるシミュレーションプログラムとを備えるコンピュータとを有する生体組織の処置をシミュレーションするためのシミュレータにおいて、実体ハンドルは生体組織を非接触で処置するためのレーザーのレーザー光を出射するレーザーヘッドを模している。シミュレータは、レーザーのレーザーパラメータと生体組織の組織パラメータとを入力する入力手段を有する。シミュレーションプログラムは、位置関係及びレーザーパラメータに基づいて生体組織上でのレーザー光の照射面と該照射面の中でのエネルギー密度の分布とを算出する。シミュレーションプログラムは、エネルギー密度の分布と組織パラメータとに基づいて画面上に物質の除去を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体組織の処置をシミュレーションするためのシミュレータ装置及び方法に関し、より具体的には歯科処置をシミュレーションするためのシミュレータ及び方法に関する。
【背景技術】
【0002】
科学の多くの領域において、並進及び回転の自由度を有するハンドルの手動操作が、その手動操作に対応する器具の運動へと機械的又は電気機械的に変換される。この変換は、例えば、適切な増大型やサーボ型の伝達を介して行うことが可能であり、その場合、ハンドルを握り手として、器具を把持部として設計することができる。このような補助具は、例えば、危険物質を扱う実験室において使用される。作業者は握り手において握る動作を行うが、握られる対象は、作業者の手の運動に追随する離れた位置にある把持部によって処理される。「画像空間(image space)」とは、器具(把持具)が配置されている空間である。画像空間は「物体空間(object space)」、つまりハンドルが動かされる3次元空間(観測空間)と関連付けられている。もし「画像空間」(器具が配置されている空間)が単に仮想的なものであり、コンピュータの画面に表現されているものであるならば、操作は現実においては実行されず、単にシミュレーションされるだけである。本発明は、このようなシミュレーションを実行することができる装置を開示するものである。コンピュータの画面に表示される仮想的な画像は、器具とその器具が組み込まれた環境を、「被加工物」つまり操作が行われる対象との位置関係において描写する。従って、器具と被加工物が画像空間において相互に対して同じ位置関係をとって動く限りにおいて、画像空間は物体空間のコピーとなる。本願発明によると、上記の一般的な序論における「被加工物」は人体組織であり、シミュレータは、医学的介入を行うことを習得するために作業者によって使用される。
【0003】
ここに開示されるシミュレーション装置は、歯科医学の虫歯の処置において、物質を消費することなく、ドリルや類似の物を取り扱う練習を所望の回数行い、その過程において発生する力を経験することができるコスト面で効率の良い方法として使用され得る。一般的に、コンピュータ断層撮影法(CT)又は磁気共鳴断層撮影法(MRI)を使用して得られた実際の患者のデータを生体組織をシミュレーションするための基礎として使用することができる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、生体組織(上記の一般的な序論における「被加工物」)の処置をシミュレーションするのに使用することができるシミュレータを提供することである。本発明の別の課題は、生体組織の処置をシミュレーションするための方法を提供することである。
【課題を解決するための手段】
【0005】
実体ハンドル(real handle)は、生体組織を非接触で処置するためのレーザーにおけるレーザー光を出射するレーザーヘッドを模したものである。実体ハンドル、特に動作検知手段によって検知される実体ハンドルの運動は、生体組織との位置関係において、コンピュータの画面にリアルタイムで表示される。この過程において、生体組織は、仮想的に、つまりコンピュータ画面上に表示することもできるし、あるいは現実の模型として縮尺どおりに形成することもできる。前者の場合には、使用者/作業者の集中は完全に画面上に表現された仮想世界に向けられる。後者の場合には、作業者は実世界と仮想世界の両方において行われる運動を見ることができ、シミュレータの操作を習得するのに有益である。シミュレータの操作において、前者の仮想世界を見ることは、後者の場合の第二の過程であるとみなせる。いずれの場合にも、実体ハンドルはコンピュータのマウスのカーソルのように振舞うが、マウスの2次元の運動が画面上に2次元の運動として表示されるのとは異なり、関連付けられた運動においてx、y、z、α、β、γの座標を備える6次元の位相空間を有する実体ハンドルが、x’、y’、z’、α’、β’、γ’の座標を備える仮想の6次元の位相空間に表示される。ここで、(vx,vy,vz,ωx,ωy,ωz)real(実体)→(vx’,vy’,vz’,ωx’,ωy’,ωz’)virtual(仮想)であり、i,j,k,l∈{x,y,z}として、viは物体空間における速度、vj’は画像空間における速度、ωkは物体空間における(x、y、z軸に関する)角速度、ωl’は画像空間における(x’、y’、z’軸に関する)角速度である。ここで言う「関連付けられた」とは、仮想空間がコンピュータ上でカバリエ投影図として表現されるということであり、その結果、実体ハンドルのΔx(Δy)の並進運動は、仮想ハンドル(virtual handle)のΔx’(Δy’)の並進運動となる(ただしΔx=Δx’、Δy=Δy’であり、画面の平面は単位ベクトルex、eyを用いてx・ex、y・eyで規定される)。そして、実体ハンドルのΔzの並進運動は、仮想ハンドルのΔz’の並進運動となる(ただしΔz’=1/2Δzである)。それぞれの角度の表現は、実体ハンドル及びその仮想像中の2点の座標によって定まる。さらには、角度α(α’)、β(β’)、γ(γ’)はそれぞれ、ハンドルの長軸と、yz平面におけるx軸、xz平面におけるy軸、xy平面におけるz軸との間の角度であり、ωx、ωy、ωzは対応する角速度である。あるいは、「関連付けられた」状態とする代わりに、運動をより明確化するために、運動をある倍率で伸張し、それによって画面上の表示を拡大することもできるし、又は操作領域の全体像をよりよく見られるようにするために、運動を圧縮し、それによって画面上の表示のサイズを縮小することもできる。
【0006】
シミュレータはさらに、コンピュータにレーザーのレーザーパラメータとシミュレーションされる生体組織の組織パラメータを入力するための入力装置を有する。レーザーパラメータは、連続出力又はパルス出力とすることができる出力モード、レーザー光の波長λ又は波長範囲Δλ、強度、レーザーから発せられるレーザー光の拡がり角を含むものである。組織パラメータは組織の種類(例えば上皮組織、結合組織または支持組織、筋組織、神経組織、そして硬質及び軟質の歯系組織)、使用される波長λに対する反射及び吸収、(例えば唾液による)湿潤、硬さ、注入されたエネルギーをより深い箇所の組織に伝達することに関して重要な熱伝導度を含むものである。シミュレーションプログラムは、これらのパラメータを使用して、最適な処置期間Δtと最短の処置距離を決定する。シミュレーションプログラムはさらに、この位置関係及びレーザーパラメータに基づいて、シミュレーションされる生体組織のレーザー光を照射される表面と、その照射される表面の範囲におけるエネルギー密度の分布とを算出する。照射される生体組織の表面の領域は、ハンドルからの距離が長くなるほど、そしてレーザー光の入射角が直角からずれるほど、広くなる。例えば、大臼歯又は小臼歯の咀嚼面の場合には、照射される表面の領域は、複雑な形状を有する。
【0007】
シミュレーションプログラムは、エネルギー密度の分布及び組織パラメータに基づいて、シミュレーションされる組織がどのように除去されるかを画面上に表示する。物質(組織)の除去は、その瞬間に捉えられる表面構造のみを見えるようにして3次元で表現される。あるいは、その瞬間に捉えられる表面構造に重ねて、当初の生体組織の形状を透けた影として見えるようにしておいて、組織の除去を表現する。当初の組織形状を透けた影として表示することによって、局所的に除去された物質の量が可視化されるという利点があり、それによって、組織においてどの程度の「深さ」まで照射が行われたのかを明確に知ることができる。シミュレータ装置が除去される組織を画面上に2次元で表示する場合にも、除去された物質の量を透けさせて表示しなくてもよく、表示がより明確になるという点を除いて、同じ議論が本質的に当てはまる。
【0008】
処置の間、ハンドルの位置が一定に保たれるならば、物質(組織)の除去が連続的に起こるため、レーザー光の通り道の形状及びエネルギー密度の分布は自然に変化する。その結果、エネルギー密度は局所的に急激に変化することがあり、許容される最大値を超えて急激に上昇することがある。このことは、例えば歯の一部が「欠ける」ことによって、物質の除去が実質的に「より大きな」体積を単位として不連続に起こる処置において特に考慮に入れておかなければならない。所定の処置の状況において予想される不連続的な除去を作業者に前もって伝達できるならば有利であり、その結果、単位時間当たりの除去量を少なくするためにレーザー光の強度を小さくすることができる。シミュレータ装置は、「感触型の装置(haptic system)」に類似させて構築することができる。感触型の装置においては、実際的な力学的反応を操作者が経験するが、この反応はシミュレーションされる処置の状況に対応し、作業者がシミュレーションされる医療器具を制御しながら操作するのを容易にするものである。シミュレータ装置において、本物の力学的反応が存在しないことは、習得の成功に対して等価に寄与する視覚−音響制御の要素によって少なくとも部分的に埋め合わせられる。シミュレーションにおいては、実際の場合にはレーザー光が目に見えないという事情も考慮される。シミュレーションの場合にも、生体組織に対するレーザー光の影響のみが表示される。
【0009】
レーザー光はスイッチが作動されている間のみ出射される。スイッチは、実体ハンドルに組み込むこともできるし、あるいは足踏みスイッチとして設計することもできる。その結果、従来の歯科用ドリルについて使用される用語で言うと、実体ハンドルを、作業者の集中に支障を来さない単純な方法で「下ろす(put down)」ことができる。従って、それまででどの程度処置が達成されたのかを評価するため、また生体組織のさらに別の箇所を選択するために、処置を中断することができる。シミュレータは、レーザー光が出射されている間、つまりスイッチが作動されている間、信号発生手段によって音響信号を出す。このようにして、作業者は反応を経験し、このことは過失による出射を回避する助けとなる。
【0010】
シミュレータ装置はスイッチの作動時間を決定し、その結果、処置時間も決定する。処置時間は、画面に表示され、照射によって達成される除去の効果に基づくものである。処置時間は、生体組織、レーザー光、そして組織に対するレーザー光の位置に関する所定のパラメータに基づいて決定される。シミュレータ装置は、処置期間Δtを決定する処置時間決定手段を有する。処置時間はスイッチを一度短く作動させることで開始され、レーザー光の出射は処置期間が経過した後に自動的に停止される。スイッチを新たに短く作動させると、レーザー光がさらに処置期間Δtの間新たに出射される。処置期間は処置に固有の対応表を使用して決定することもできるし、あるいは作業者の経験に基づいたものとすることもできる。スイッチは足踏みスイッチと実体ハンドルに組み込まれた手動スイッチの両方を含んでいる。手動スイッチを過失で作動させてしまうことによってレーザー光が意図せずに出射されることをなくし、足踏みスイッチと手動スイッチが同時に作動された場合にのみレーザー光が出射されるように、足踏みスイッチと手動スイッチは直列接続されている。
【0011】
シミュレーションプログラムは、仮想ハンドルとシミュレーションされる生体組織の位置関係を検知する。この位置関係には、ハンドルと組織の間の空間的分離(最短距離)、そしてハンドルからのレーザー光の出射位置とレーザー光の軸が生体組織の表面と交わる点との間の処置距離のような種々の成分が含まれる。この空間的分離及び処置距離は、常に同じである必要はない。特に、空間的分離は、ハンドルの形状及び生体組織の形状に依存する。位置関係のもう1つの成分は、ハンドルの長軸とシミュレーションされる生体組織の特徴軸との間の角度である。例えば生体組織が歯である場合には、歯の長軸であり、つまり、その歯が歯根を1つ有する場合には、切縁又は咀嚼面の中心から歯根の先端に至る仮想線である。もしその歯が複数の歯根を有する場合には、特徴軸は咀嚼面の中心から二分岐又は三分岐の中心へ伸びる。シミュレータ装置は、2つの視点の間を切り替え、又は複数の視点の間を巡回する表示設定手段を有している。表示設定手段は、ハンドルの長軸及び生体組織の特徴軸を表示する色も設定する。
【0012】
シミュレーションプログラムはレーザー光及び照射面を表示する。照射面の形状及びレーザー光が影響を及ぼす生体組織の領域は、通常初心者には見積もることができないので、照射面を色付きで表示し、照射部がどのように分布しているのという感覚を初心者が培うのを補助することが好ましい。照射面を色付きで表示することは、処置すべき表面領域のみに照射を行うためにハンドルをどのように保持し、配置すべきかを初心者が習得するのを補助するものでもある。しかしながら、上記のように、実際のレーザー光及び実際の照射面は一般的には目に見えず、少なくとも裸眼では見えない。
【0013】
シミュレータ装置で使用されるレーザーは、Nd:YAGレーザー、Ho:YAGレーザー、又はEr:YAGレーザーである。つまりネオジム、ホルミウム、又はエルビウムがドープされたイットリウム−アルミニウム−ガーネットレーザーである。これらのレーザーの波長は、1024nm、2127nm、2940nmである。しかし、シミュレータ装置において、これら以外の波長を使用することもできる。使用するレーザーの種類は、処置される組織に依存する。具体的には、分光吸収に依存し、吸収が強いほどレーザーの侵入深さが浅くなり、よってレーザーが侵入した組織におけるエネルギー密度が高くなる。
【0014】
シミュレータ装置は、仮想ハンドルとシミュレーションされる生体組織との間の望まない接触(分離距離が最低限になること)を通知するための通知手段を有する。通知手段は、分離距離が最低限の領域に仮想ハンドルが入った時に通知を行う。もし実際のハンドルと実際の組織の間の距離が最低限の分離距離よりも短くなると、ハンドルが組織と接触する危険性がある。このようなことは特に、ハンドルの幅が比較的広く、熟練していない作業者がレーザー光又は生体組織の照射領域に集中している場合に起こる可能性があり、その結果、組織と横方向に接触してしまう。
【0015】
一実施例においては、仮想ハンドルとシミュレーションされる生体組織との間の最低限の分離距離に仮想ハンドルが入らないように、実体ハンドルの運動を阻止できる。さらに、生体組織から離れる方向の実体ハンドルの並進運動及び/又は実体ハンドルの(位置に依存する)角度方向の運動が、処置される生体組織の周辺の3次元の空間の範囲内でのみ可能となるように、実体ハンドルの運動を制限することができる。このことは、歯の処置の場合に、処置される歯のみではなく、その歯の口腔内における位置も画面に表示されることを意味している。歯又は歯肉組織のようなその他の歯系組織の処置において口腔がハンドルの運動の自由度を制限するので、このことは重要である。処置される歯又は組織が口腔内の深い位置にあるほど、ハンドルの運動の自由度が制限される。従って、奥の大臼歯の処置は、門歯又は犬歯の処置よりも高い技術を要する。
【0016】
シミュレータ装置は、生体組織及び第一の実体ハンドルとの位置関係において画面上に表示される第二の実体ハンドルを有することができる。シミュレータ装置は、患者及び/又は作業者の頭の運動を検知する別の動作検知手段を有することもできる。シミュレータ装置は、強調された3次元コンピュータグラフィックスのような専用の3次元可視化手段を有することもできる。これらの付加的な部品は、シミュレーション装置の使用をより実際的なものとする。シミュレータ装置を使用して所望の時間の練習を行った後、作業者はこれらの付加的な部品を個別に又は組み合わせて付加することができる。患者の頭の運動の画面への表示は、シミュレーションされる生体組織が典型的な運動の影響を受けるようにすることで最も簡単に行うことができ、画面上に単に模式的に表示することができる。シミュレーションの現実感を増すため、口を開けた頭を画面上に模式的に表示することができる。これによって作業者は、患者の痛みによるシミュレーションされた反射運動に対する反応を習得する。
【0017】
最後に、作業者の頭の運動の検知は、1人又は複数の作業者の観察角度からの画像空間を表示するのに使用される。
【0018】
3次元画像は、左目と右目が異なる情報つまり像を認識する3次元眼鏡を使用して作ることができる。これは、3次元眼鏡の左レンズと右レンズに異なった彩色(赤と緑)を施すこと、又は異なる偏光を遮らせることによって行うことができる。特に複数の作業者又は補助者が一緒にシミュレータ装置で作業をする場合に、それぞれの作業者が自身の観察角度からシミュレーションされる生体組織を見られるように、作業者らはそれぞれ独立したスクリーンに対応する眼鏡を使用する。画面はそれぞれの眼鏡に組み込むことができる。このようにして、作業者らは3次元の「協同的仮想現実(cooperative virtual reality)」に参加することができる。シミュレータは、様々な視点の間で切り替えを行うことができ、監督者に用いられる3次元眼鏡を有する。監督者は、複数の使用者の習得過程を監視して各使用者の視点を受け継ぐことができる
【0019】
上記シミュレータ装置を使用して生体組織の処置をシミュレーションする方法は、レーザーヘッドとして設計された実体ハンドルを6次元の位相空間で動かす過程を有する。実体ハンドルの運動は、仮想的な6次元の位相空間において、仮想ハンドルの運動として表示される。仮想ハンドルの運動は、シミュレータ装置の画面上で、シミュレーションされる生体組織に対する位置関係において表示される。シミュレータ装置は、レーザーヘッドから出射されるレーザー光による生体組織の照射をシミュレートする。
【0020】
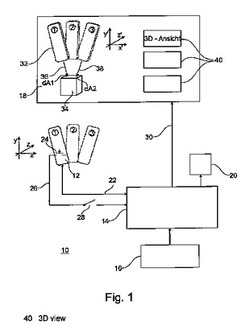
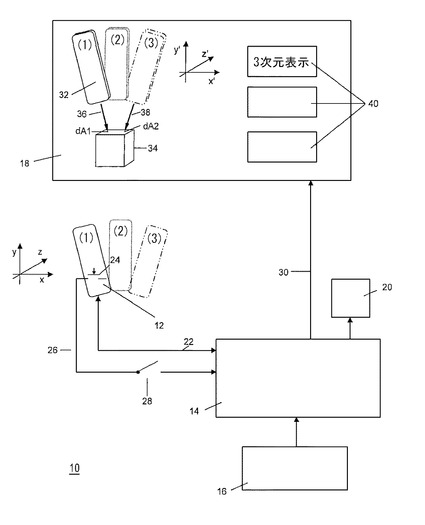
図1は、実体ハンドル12、コンピュータ14、キーボード16、画面18、スピーカー20を有するシミュレータ装置10を示している。実体ハンドル12は、レーザーのレーザーヘッドを示している。ハンドル12は、シミュレータ装置10の使用者がxyz物体空間(観察空間)において意のままに動かせるように、コンピュータ14に取り付けられている。これにより、ハンドル12は、xyz物体空間において、3次元の並進自由度{x,y,z}とx、y、z軸の周りの3次元の回転自由度{ωx,ωy,ωz}を有する。ハンドル12又はそのホルダ(不図示)は、コンピュータ14に双方向データライン22を介して接続されている。一方では、ハンドル12に組み込まれた運動検知手段(不図示)によって検知されたハンドル12の運動のデータは、データライン22を介してコンピュータ14に伝達される。他方では、所定の状況でハンドル12の一定の運動を阻止するデータがコンピュータ14からホルダに送られる。このことは、ハンドル12の運動を許容する受動的な役割と、一定のそれ以外の運動を阻止する能動的な役割をホルダが果たすことを意味している。ハンドル12は、ライン26を介してコンピュータ14に接続されるスイッチ24も有している。さらに、スイッチ24と直列接続されたスイッチ28がライン26の途中に配置されている。ハンドル12に至る電気回路を閉じるためには、スイッチ24と28の両方が必要であり、スイッチ24は手で押して作動され、スイッチ28は作業者の足で作動される。
【0021】
画面18は、ライン30を介してコンピュータ14に接続されており、画面18はコンピュータ14によって制御される。x’y’z’画像空間は画面18上に表示され、そこでは、実体ハンドル12と同じ大きさと形状を有する仮想ハンドル32が、処置される生体組織34との位置関係において表示される。実体ハンドル12から受け取った運動のデータから、コンピュータ14は仮想ハンドル32のための運動のデータを生成する。仮想ハンドル32は、実体ハンドル12の運動にリアルタイムで追随する。このように、コンピュータ14は、(vx,vy,vz,ωx,ωy,ωz)real→(vx’,vy’,vz’,ωx’,ωy’,ωz’)virtualとして、画面18上の仮想的な画像空間における実際の物体空間の表現を生成している。図1に、実体ハンドル12と仮想ハンドル32の対応する運動を図で示す。ここで、ハンドル12が開始点(1)から終了点(3)まで動くのに伴い、これらの運動が画面18上の画像空間に表示される。
【0022】
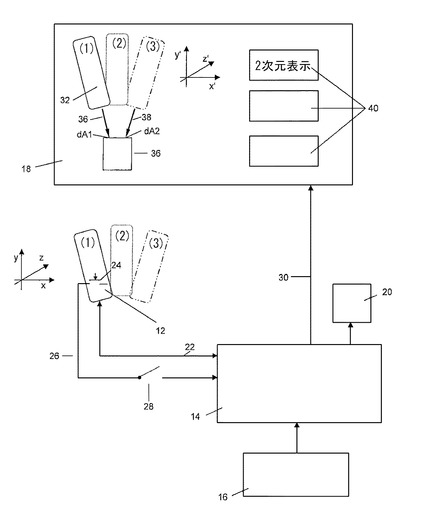
図1において、矢印36及び38は、画面18上の開始点(1)及び終了点(3)におけるレーザー光を示している。第一の表面要素dA1を処置した後に、レーザー光を停止し、第二の表面要素dA2を処置するためにレーザーヘッド12、32を位置(3)に動かした後で再びレーザー光を出射することができることを示すため、中間の位置(2)においては、矢印が表示されていない。例えば、第一及び第二の表面要素dA1、dA2は、歯の異なる面である。レーザーヘッド12、32は、実体ハンドル12上のスイッチ24と足踏みスイッチ28の両方が作動された時、処置期間Δtの間のみレーザー光を出射する。特に、スイッチ28は、望まないレーザー光の出射を防止するのに使用される。このように、画面18には、スイッチ24と28が同時に作動された時のみ、レーザー光を表す矢印が表示される。
【0023】
レーザー光を表す矢印36、38は、仮想ハンドル32の下端に位置するレーザーヘッドよりレーザー光が出射される箇所から始まっている。矢印36、38は表面要素dA1、dA2で終わっている。コンピュータ14が矢印36、38の位置、長さ、方向を正しく再現できるように、実体ハンドル12及び仮想ハンドル32の両方について参照位置を定義しなければならない。参照位置は、画面18上に別の位置として表示される。
【0024】
画面18には、複数のウインドウ40が表示されてもよい。シミュレータ装置10は、キーボード16を介して入力される、又はコンピュータ14のメモリ(不図示)から読み出される、レーザーパラメータ及び組織パラメータをウインドウ40に表示する。
【0025】
図1では、仮想ハンドル32とシミュレーションされる生体組織34の3次元表示を画面18上に示している。3次元表示に対応するパラメータ及び情報がウインドウ40の最上段のウインドウに表示されている。図2では、仮想ハンドル32とシミュレーションされる生体組織34の2次元表示を画面18上に示している。2次元表示に対応するパラメータ及び情報が図2のウインドウ40の最上段のウインドウに表示されている。従って、上述のシミュレーションされる生体組織34の断面図のような、付加的な画像を表示することもできる。仮想ハンドル32が、仮想ハンドル32とシミュレーションされる生体組織34の間の分離距離として許容される最低値の中に入ったことを知らせる警告信号を画面18上に視覚的に表示するか、あるいはスピーカー20を通して音響的に伝達することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施形態にかかる、三次元表示を備えるシミュレータ装置の構成を示す概略図である。
【図2】本発明の一実施形態にかかる、二次元表示を備えるシミュレータ装置の構成を示す概略図である。
【技術分野】
【0001】
本発明は、生体組織の処置をシミュレーションするためのシミュレータ装置及び方法に関し、より具体的には歯科処置をシミュレーションするためのシミュレータ及び方法に関する。
【背景技術】
【0002】
科学の多くの領域において、並進及び回転の自由度を有するハンドルの手動操作が、その手動操作に対応する器具の運動へと機械的又は電気機械的に変換される。この変換は、例えば、適切な増大型やサーボ型の伝達を介して行うことが可能であり、その場合、ハンドルを握り手として、器具を把持部として設計することができる。このような補助具は、例えば、危険物質を扱う実験室において使用される。作業者は握り手において握る動作を行うが、握られる対象は、作業者の手の運動に追随する離れた位置にある把持部によって処理される。「画像空間(image space)」とは、器具(把持具)が配置されている空間である。画像空間は「物体空間(object space)」、つまりハンドルが動かされる3次元空間(観測空間)と関連付けられている。もし「画像空間」(器具が配置されている空間)が単に仮想的なものであり、コンピュータの画面に表現されているものであるならば、操作は現実においては実行されず、単にシミュレーションされるだけである。本発明は、このようなシミュレーションを実行することができる装置を開示するものである。コンピュータの画面に表示される仮想的な画像は、器具とその器具が組み込まれた環境を、「被加工物」つまり操作が行われる対象との位置関係において描写する。従って、器具と被加工物が画像空間において相互に対して同じ位置関係をとって動く限りにおいて、画像空間は物体空間のコピーとなる。本願発明によると、上記の一般的な序論における「被加工物」は人体組織であり、シミュレータは、医学的介入を行うことを習得するために作業者によって使用される。
【0003】
ここに開示されるシミュレーション装置は、歯科医学の虫歯の処置において、物質を消費することなく、ドリルや類似の物を取り扱う練習を所望の回数行い、その過程において発生する力を経験することができるコスト面で効率の良い方法として使用され得る。一般的に、コンピュータ断層撮影法(CT)又は磁気共鳴断層撮影法(MRI)を使用して得られた実際の患者のデータを生体組織をシミュレーションするための基礎として使用することができる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、生体組織(上記の一般的な序論における「被加工物」)の処置をシミュレーションするのに使用することができるシミュレータを提供することである。本発明の別の課題は、生体組織の処置をシミュレーションするための方法を提供することである。
【課題を解決するための手段】
【0005】
実体ハンドル(real handle)は、生体組織を非接触で処置するためのレーザーにおけるレーザー光を出射するレーザーヘッドを模したものである。実体ハンドル、特に動作検知手段によって検知される実体ハンドルの運動は、生体組織との位置関係において、コンピュータの画面にリアルタイムで表示される。この過程において、生体組織は、仮想的に、つまりコンピュータ画面上に表示することもできるし、あるいは現実の模型として縮尺どおりに形成することもできる。前者の場合には、使用者/作業者の集中は完全に画面上に表現された仮想世界に向けられる。後者の場合には、作業者は実世界と仮想世界の両方において行われる運動を見ることができ、シミュレータの操作を習得するのに有益である。シミュレータの操作において、前者の仮想世界を見ることは、後者の場合の第二の過程であるとみなせる。いずれの場合にも、実体ハンドルはコンピュータのマウスのカーソルのように振舞うが、マウスの2次元の運動が画面上に2次元の運動として表示されるのとは異なり、関連付けられた運動においてx、y、z、α、β、γの座標を備える6次元の位相空間を有する実体ハンドルが、x’、y’、z’、α’、β’、γ’の座標を備える仮想の6次元の位相空間に表示される。ここで、(vx,vy,vz,ωx,ωy,ωz)real(実体)→(vx’,vy’,vz’,ωx’,ωy’,ωz’)virtual(仮想)であり、i,j,k,l∈{x,y,z}として、viは物体空間における速度、vj’は画像空間における速度、ωkは物体空間における(x、y、z軸に関する)角速度、ωl’は画像空間における(x’、y’、z’軸に関する)角速度である。ここで言う「関連付けられた」とは、仮想空間がコンピュータ上でカバリエ投影図として表現されるということであり、その結果、実体ハンドルのΔx(Δy)の並進運動は、仮想ハンドル(virtual handle)のΔx’(Δy’)の並進運動となる(ただしΔx=Δx’、Δy=Δy’であり、画面の平面は単位ベクトルex、eyを用いてx・ex、y・eyで規定される)。そして、実体ハンドルのΔzの並進運動は、仮想ハンドルのΔz’の並進運動となる(ただしΔz’=1/2Δzである)。それぞれの角度の表現は、実体ハンドル及びその仮想像中の2点の座標によって定まる。さらには、角度α(α’)、β(β’)、γ(γ’)はそれぞれ、ハンドルの長軸と、yz平面におけるx軸、xz平面におけるy軸、xy平面におけるz軸との間の角度であり、ωx、ωy、ωzは対応する角速度である。あるいは、「関連付けられた」状態とする代わりに、運動をより明確化するために、運動をある倍率で伸張し、それによって画面上の表示を拡大することもできるし、又は操作領域の全体像をよりよく見られるようにするために、運動を圧縮し、それによって画面上の表示のサイズを縮小することもできる。
【0006】
シミュレータはさらに、コンピュータにレーザーのレーザーパラメータとシミュレーションされる生体組織の組織パラメータを入力するための入力装置を有する。レーザーパラメータは、連続出力又はパルス出力とすることができる出力モード、レーザー光の波長λ又は波長範囲Δλ、強度、レーザーから発せられるレーザー光の拡がり角を含むものである。組織パラメータは組織の種類(例えば上皮組織、結合組織または支持組織、筋組織、神経組織、そして硬質及び軟質の歯系組織)、使用される波長λに対する反射及び吸収、(例えば唾液による)湿潤、硬さ、注入されたエネルギーをより深い箇所の組織に伝達することに関して重要な熱伝導度を含むものである。シミュレーションプログラムは、これらのパラメータを使用して、最適な処置期間Δtと最短の処置距離を決定する。シミュレーションプログラムはさらに、この位置関係及びレーザーパラメータに基づいて、シミュレーションされる生体組織のレーザー光を照射される表面と、その照射される表面の範囲におけるエネルギー密度の分布とを算出する。照射される生体組織の表面の領域は、ハンドルからの距離が長くなるほど、そしてレーザー光の入射角が直角からずれるほど、広くなる。例えば、大臼歯又は小臼歯の咀嚼面の場合には、照射される表面の領域は、複雑な形状を有する。
【0007】
シミュレーションプログラムは、エネルギー密度の分布及び組織パラメータに基づいて、シミュレーションされる組織がどのように除去されるかを画面上に表示する。物質(組織)の除去は、その瞬間に捉えられる表面構造のみを見えるようにして3次元で表現される。あるいは、その瞬間に捉えられる表面構造に重ねて、当初の生体組織の形状を透けた影として見えるようにしておいて、組織の除去を表現する。当初の組織形状を透けた影として表示することによって、局所的に除去された物質の量が可視化されるという利点があり、それによって、組織においてどの程度の「深さ」まで照射が行われたのかを明確に知ることができる。シミュレータ装置が除去される組織を画面上に2次元で表示する場合にも、除去された物質の量を透けさせて表示しなくてもよく、表示がより明確になるという点を除いて、同じ議論が本質的に当てはまる。
【0008】
処置の間、ハンドルの位置が一定に保たれるならば、物質(組織)の除去が連続的に起こるため、レーザー光の通り道の形状及びエネルギー密度の分布は自然に変化する。その結果、エネルギー密度は局所的に急激に変化することがあり、許容される最大値を超えて急激に上昇することがある。このことは、例えば歯の一部が「欠ける」ことによって、物質の除去が実質的に「より大きな」体積を単位として不連続に起こる処置において特に考慮に入れておかなければならない。所定の処置の状況において予想される不連続的な除去を作業者に前もって伝達できるならば有利であり、その結果、単位時間当たりの除去量を少なくするためにレーザー光の強度を小さくすることができる。シミュレータ装置は、「感触型の装置(haptic system)」に類似させて構築することができる。感触型の装置においては、実際的な力学的反応を操作者が経験するが、この反応はシミュレーションされる処置の状況に対応し、作業者がシミュレーションされる医療器具を制御しながら操作するのを容易にするものである。シミュレータ装置において、本物の力学的反応が存在しないことは、習得の成功に対して等価に寄与する視覚−音響制御の要素によって少なくとも部分的に埋め合わせられる。シミュレーションにおいては、実際の場合にはレーザー光が目に見えないという事情も考慮される。シミュレーションの場合にも、生体組織に対するレーザー光の影響のみが表示される。
【0009】
レーザー光はスイッチが作動されている間のみ出射される。スイッチは、実体ハンドルに組み込むこともできるし、あるいは足踏みスイッチとして設計することもできる。その結果、従来の歯科用ドリルについて使用される用語で言うと、実体ハンドルを、作業者の集中に支障を来さない単純な方法で「下ろす(put down)」ことができる。従って、それまででどの程度処置が達成されたのかを評価するため、また生体組織のさらに別の箇所を選択するために、処置を中断することができる。シミュレータは、レーザー光が出射されている間、つまりスイッチが作動されている間、信号発生手段によって音響信号を出す。このようにして、作業者は反応を経験し、このことは過失による出射を回避する助けとなる。
【0010】
シミュレータ装置はスイッチの作動時間を決定し、その結果、処置時間も決定する。処置時間は、画面に表示され、照射によって達成される除去の効果に基づくものである。処置時間は、生体組織、レーザー光、そして組織に対するレーザー光の位置に関する所定のパラメータに基づいて決定される。シミュレータ装置は、処置期間Δtを決定する処置時間決定手段を有する。処置時間はスイッチを一度短く作動させることで開始され、レーザー光の出射は処置期間が経過した後に自動的に停止される。スイッチを新たに短く作動させると、レーザー光がさらに処置期間Δtの間新たに出射される。処置期間は処置に固有の対応表を使用して決定することもできるし、あるいは作業者の経験に基づいたものとすることもできる。スイッチは足踏みスイッチと実体ハンドルに組み込まれた手動スイッチの両方を含んでいる。手動スイッチを過失で作動させてしまうことによってレーザー光が意図せずに出射されることをなくし、足踏みスイッチと手動スイッチが同時に作動された場合にのみレーザー光が出射されるように、足踏みスイッチと手動スイッチは直列接続されている。
【0011】
シミュレーションプログラムは、仮想ハンドルとシミュレーションされる生体組織の位置関係を検知する。この位置関係には、ハンドルと組織の間の空間的分離(最短距離)、そしてハンドルからのレーザー光の出射位置とレーザー光の軸が生体組織の表面と交わる点との間の処置距離のような種々の成分が含まれる。この空間的分離及び処置距離は、常に同じである必要はない。特に、空間的分離は、ハンドルの形状及び生体組織の形状に依存する。位置関係のもう1つの成分は、ハンドルの長軸とシミュレーションされる生体組織の特徴軸との間の角度である。例えば生体組織が歯である場合には、歯の長軸であり、つまり、その歯が歯根を1つ有する場合には、切縁又は咀嚼面の中心から歯根の先端に至る仮想線である。もしその歯が複数の歯根を有する場合には、特徴軸は咀嚼面の中心から二分岐又は三分岐の中心へ伸びる。シミュレータ装置は、2つの視点の間を切り替え、又は複数の視点の間を巡回する表示設定手段を有している。表示設定手段は、ハンドルの長軸及び生体組織の特徴軸を表示する色も設定する。
【0012】
シミュレーションプログラムはレーザー光及び照射面を表示する。照射面の形状及びレーザー光が影響を及ぼす生体組織の領域は、通常初心者には見積もることができないので、照射面を色付きで表示し、照射部がどのように分布しているのという感覚を初心者が培うのを補助することが好ましい。照射面を色付きで表示することは、処置すべき表面領域のみに照射を行うためにハンドルをどのように保持し、配置すべきかを初心者が習得するのを補助するものでもある。しかしながら、上記のように、実際のレーザー光及び実際の照射面は一般的には目に見えず、少なくとも裸眼では見えない。
【0013】
シミュレータ装置で使用されるレーザーは、Nd:YAGレーザー、Ho:YAGレーザー、又はEr:YAGレーザーである。つまりネオジム、ホルミウム、又はエルビウムがドープされたイットリウム−アルミニウム−ガーネットレーザーである。これらのレーザーの波長は、1024nm、2127nm、2940nmである。しかし、シミュレータ装置において、これら以外の波長を使用することもできる。使用するレーザーの種類は、処置される組織に依存する。具体的には、分光吸収に依存し、吸収が強いほどレーザーの侵入深さが浅くなり、よってレーザーが侵入した組織におけるエネルギー密度が高くなる。
【0014】
シミュレータ装置は、仮想ハンドルとシミュレーションされる生体組織との間の望まない接触(分離距離が最低限になること)を通知するための通知手段を有する。通知手段は、分離距離が最低限の領域に仮想ハンドルが入った時に通知を行う。もし実際のハンドルと実際の組織の間の距離が最低限の分離距離よりも短くなると、ハンドルが組織と接触する危険性がある。このようなことは特に、ハンドルの幅が比較的広く、熟練していない作業者がレーザー光又は生体組織の照射領域に集中している場合に起こる可能性があり、その結果、組織と横方向に接触してしまう。
【0015】
一実施例においては、仮想ハンドルとシミュレーションされる生体組織との間の最低限の分離距離に仮想ハンドルが入らないように、実体ハンドルの運動を阻止できる。さらに、生体組織から離れる方向の実体ハンドルの並進運動及び/又は実体ハンドルの(位置に依存する)角度方向の運動が、処置される生体組織の周辺の3次元の空間の範囲内でのみ可能となるように、実体ハンドルの運動を制限することができる。このことは、歯の処置の場合に、処置される歯のみではなく、その歯の口腔内における位置も画面に表示されることを意味している。歯又は歯肉組織のようなその他の歯系組織の処置において口腔がハンドルの運動の自由度を制限するので、このことは重要である。処置される歯又は組織が口腔内の深い位置にあるほど、ハンドルの運動の自由度が制限される。従って、奥の大臼歯の処置は、門歯又は犬歯の処置よりも高い技術を要する。
【0016】
シミュレータ装置は、生体組織及び第一の実体ハンドルとの位置関係において画面上に表示される第二の実体ハンドルを有することができる。シミュレータ装置は、患者及び/又は作業者の頭の運動を検知する別の動作検知手段を有することもできる。シミュレータ装置は、強調された3次元コンピュータグラフィックスのような専用の3次元可視化手段を有することもできる。これらの付加的な部品は、シミュレーション装置の使用をより実際的なものとする。シミュレータ装置を使用して所望の時間の練習を行った後、作業者はこれらの付加的な部品を個別に又は組み合わせて付加することができる。患者の頭の運動の画面への表示は、シミュレーションされる生体組織が典型的な運動の影響を受けるようにすることで最も簡単に行うことができ、画面上に単に模式的に表示することができる。シミュレーションの現実感を増すため、口を開けた頭を画面上に模式的に表示することができる。これによって作業者は、患者の痛みによるシミュレーションされた反射運動に対する反応を習得する。
【0017】
最後に、作業者の頭の運動の検知は、1人又は複数の作業者の観察角度からの画像空間を表示するのに使用される。
【0018】
3次元画像は、左目と右目が異なる情報つまり像を認識する3次元眼鏡を使用して作ることができる。これは、3次元眼鏡の左レンズと右レンズに異なった彩色(赤と緑)を施すこと、又は異なる偏光を遮らせることによって行うことができる。特に複数の作業者又は補助者が一緒にシミュレータ装置で作業をする場合に、それぞれの作業者が自身の観察角度からシミュレーションされる生体組織を見られるように、作業者らはそれぞれ独立したスクリーンに対応する眼鏡を使用する。画面はそれぞれの眼鏡に組み込むことができる。このようにして、作業者らは3次元の「協同的仮想現実(cooperative virtual reality)」に参加することができる。シミュレータは、様々な視点の間で切り替えを行うことができ、監督者に用いられる3次元眼鏡を有する。監督者は、複数の使用者の習得過程を監視して各使用者の視点を受け継ぐことができる
【0019】
上記シミュレータ装置を使用して生体組織の処置をシミュレーションする方法は、レーザーヘッドとして設計された実体ハンドルを6次元の位相空間で動かす過程を有する。実体ハンドルの運動は、仮想的な6次元の位相空間において、仮想ハンドルの運動として表示される。仮想ハンドルの運動は、シミュレータ装置の画面上で、シミュレーションされる生体組織に対する位置関係において表示される。シミュレータ装置は、レーザーヘッドから出射されるレーザー光による生体組織の照射をシミュレートする。
【0020】
図1は、実体ハンドル12、コンピュータ14、キーボード16、画面18、スピーカー20を有するシミュレータ装置10を示している。実体ハンドル12は、レーザーのレーザーヘッドを示している。ハンドル12は、シミュレータ装置10の使用者がxyz物体空間(観察空間)において意のままに動かせるように、コンピュータ14に取り付けられている。これにより、ハンドル12は、xyz物体空間において、3次元の並進自由度{x,y,z}とx、y、z軸の周りの3次元の回転自由度{ωx,ωy,ωz}を有する。ハンドル12又はそのホルダ(不図示)は、コンピュータ14に双方向データライン22を介して接続されている。一方では、ハンドル12に組み込まれた運動検知手段(不図示)によって検知されたハンドル12の運動のデータは、データライン22を介してコンピュータ14に伝達される。他方では、所定の状況でハンドル12の一定の運動を阻止するデータがコンピュータ14からホルダに送られる。このことは、ハンドル12の運動を許容する受動的な役割と、一定のそれ以外の運動を阻止する能動的な役割をホルダが果たすことを意味している。ハンドル12は、ライン26を介してコンピュータ14に接続されるスイッチ24も有している。さらに、スイッチ24と直列接続されたスイッチ28がライン26の途中に配置されている。ハンドル12に至る電気回路を閉じるためには、スイッチ24と28の両方が必要であり、スイッチ24は手で押して作動され、スイッチ28は作業者の足で作動される。
【0021】
画面18は、ライン30を介してコンピュータ14に接続されており、画面18はコンピュータ14によって制御される。x’y’z’画像空間は画面18上に表示され、そこでは、実体ハンドル12と同じ大きさと形状を有する仮想ハンドル32が、処置される生体組織34との位置関係において表示される。実体ハンドル12から受け取った運動のデータから、コンピュータ14は仮想ハンドル32のための運動のデータを生成する。仮想ハンドル32は、実体ハンドル12の運動にリアルタイムで追随する。このように、コンピュータ14は、(vx,vy,vz,ωx,ωy,ωz)real→(vx’,vy’,vz’,ωx’,ωy’,ωz’)virtualとして、画面18上の仮想的な画像空間における実際の物体空間の表現を生成している。図1に、実体ハンドル12と仮想ハンドル32の対応する運動を図で示す。ここで、ハンドル12が開始点(1)から終了点(3)まで動くのに伴い、これらの運動が画面18上の画像空間に表示される。
【0022】
図1において、矢印36及び38は、画面18上の開始点(1)及び終了点(3)におけるレーザー光を示している。第一の表面要素dA1を処置した後に、レーザー光を停止し、第二の表面要素dA2を処置するためにレーザーヘッド12、32を位置(3)に動かした後で再びレーザー光を出射することができることを示すため、中間の位置(2)においては、矢印が表示されていない。例えば、第一及び第二の表面要素dA1、dA2は、歯の異なる面である。レーザーヘッド12、32は、実体ハンドル12上のスイッチ24と足踏みスイッチ28の両方が作動された時、処置期間Δtの間のみレーザー光を出射する。特に、スイッチ28は、望まないレーザー光の出射を防止するのに使用される。このように、画面18には、スイッチ24と28が同時に作動された時のみ、レーザー光を表す矢印が表示される。
【0023】
レーザー光を表す矢印36、38は、仮想ハンドル32の下端に位置するレーザーヘッドよりレーザー光が出射される箇所から始まっている。矢印36、38は表面要素dA1、dA2で終わっている。コンピュータ14が矢印36、38の位置、長さ、方向を正しく再現できるように、実体ハンドル12及び仮想ハンドル32の両方について参照位置を定義しなければならない。参照位置は、画面18上に別の位置として表示される。
【0024】
画面18には、複数のウインドウ40が表示されてもよい。シミュレータ装置10は、キーボード16を介して入力される、又はコンピュータ14のメモリ(不図示)から読み出される、レーザーパラメータ及び組織パラメータをウインドウ40に表示する。
【0025】
図1では、仮想ハンドル32とシミュレーションされる生体組織34の3次元表示を画面18上に示している。3次元表示に対応するパラメータ及び情報がウインドウ40の最上段のウインドウに表示されている。図2では、仮想ハンドル32とシミュレーションされる生体組織34の2次元表示を画面18上に示している。2次元表示に対応するパラメータ及び情報が図2のウインドウ40の最上段のウインドウに表示されている。従って、上述のシミュレーションされる生体組織34の断面図のような、付加的な画像を表示することもできる。仮想ハンドル32が、仮想ハンドル32とシミュレーションされる生体組織34の間の分離距離として許容される最低値の中に入ったことを知らせる警告信号を画面18上に視覚的に表示するか、あるいはスピーカー20を通して音響的に伝達することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施形態にかかる、三次元表示を備えるシミュレータ装置の構成を示す概略図である。
【図2】本発明の一実施形態にかかる、二次元表示を備えるシミュレータ装置の構成を示す概略図である。
【特許請求の範囲】
【請求項1】
3つの併進自由度と3つの回転自由度とを有する実体ハンドルと、
生体組織と仮想ハンドルとを備える処置領域の3次元モデルを表示する画面と、
前記実体ハンドルの3次元の運動を検知する運動検知手段と、
前記運動検知手段によって検知される前記実体ハンドルの運動に基づいて、前記仮想ハンドルが前記生体組織に対する位置関係において前記画面上で動かされるシミュレーションプログラムを備えるコンピュータと、を有する生体組織の処置をシミュレーションするためのシミュレータにおいて、
前記実体ハンドルは前記生体組織を非接触で処置するためのレーザーのレーザー光を出射するレーザーヘッドを模しており、
前記シミュレータは、前記レーザーのレーザーパラメータと前記生体組織の組織パラメータとを入力する入力手段を有し、
前記シミュレーションプログラムは、前記位置関係及び前記レーザーパラメータに基づいて前記生体組織上での前記レーザー光の照射面と該照射面の中でのエネルギー密度の分布とを算出し、
前記シミュレーションプログラムは、前記エネルギー密度の分布と前記組織パラメータとに基づいて前記画面上に物質の除去を表示することを特徴とするシミュレータ。
【請求項2】
スイッチを有し、前記スイッチが作動されている間、前記レーザー光を出射することを特徴とする請求項1に記載のシミュレータ。
【請求項3】
前記スイッチが作動している間、音響信号を発する信号発生手段を有することを特徴とする請求項2に記載のシミュレータ。
【請求項4】
前記スイッチの作動時間を検知する時間検知手段を有することを特徴とする請求項2又は3に記載のシミュレータ。
【請求項5】
前記画面上の表示は、縮小又は拡大されたスケールで表示することができることを特徴とする請求項1〜4のいずれかに記載のシミュレータ。
【請求項6】
前記仮想ハンドルと前記生体組織との間の位置関係が検知されることを特徴する請求項1〜5のいずれかに記載のシミュレータ。
【請求項7】
前記シミュレーションプログラムは、前記画面上に、前記生体組織の断面図において前記物質の除去を表示することを特徴とする請求項1〜6のいずれかに記載のシミュレータ。
【請求項8】
前記シミュレーションプログラムは、前記レーザー光及び前記照射面を表示することを特徴とする請求項1〜7のいずれかに記載のシミュレータ。
【請求項9】
前記レーザーパラメータは、前記レーザー光の波長、強度、開き角、及び/又はレーザー光の種類を含むことを特徴とする請求項1〜8のいずれかに記載のシミュレータ。
【請求項10】
前記組織パラメータは、物質組成、硬さ、色、分光反射率、及び/又は表面の粗さを含むことを特徴とする請求項1〜9のいずれかに記載のシミュレータ。
【請求項11】
前記組織は、硬質の歯系組織又は軟質の歯系組織であることを特徴とする請求項1〜10のいずれかに記載のシミュレータ。
【請求項12】
前記組織は歯肉組織であることを特徴とする請求項1〜10のいずれかに記載のシミュレータ。
【請求項13】
前記レーザーはNd:YAGレーザー、Ho:YAGレーザー、又はEr:YAGレーザーであることを特徴とする請求項1〜12のいずれかに記載のシミュレータ。
【請求項14】
前記スイッチは、前記ハンドルに組み込まれたものであるか、又は足踏みスイッチであることを特徴とする請求項2〜13のいずれかに記載のシミュレータ。
【請求項15】
前記ハンドルと前記組織との間の望まない接触を通知する通知手段を有することを特徴とする請求項1〜14のいずれかに記載のシミュレータ。
【請求項16】
前記仮想ハンドルが前記生体組織から最低限の距離だけ離れた状態でなくなる方向への前記実体ハンドルの運動を阻止する阻止手段を有することを特徴とする請求項1〜15のいずれかに記載のシミュレータ。
【請求項17】
前記生体組織及び前記実体ハンドルに対する位置関係において前記画面に表示される少なくとも1つの別の実体ハンドルをさらに有することを特徴とする請求項1〜16のいずれかに記載のシミュレータ。
【請求項18】
少なくとも1つの別の運動検知手段を患者及び/又は操作者の頭の運動を検知するためにさらに有し、3次元可視化手段を有することを特徴とする請求項1〜17のいずれかに記載のシミュレータ。
【請求項19】
レーザーヘッドとして設計された実体ハンドルを実体的な6次元位相空間において運動させる過程と、
前記実体ハンドルの運動を、仮想的な6次元位相空間における仮想ハンドルの運動として描写する過程と、
シミュレータの画面上で前記仮想ハンドルの運動を生体組織との位置関係において表現する過程と、
前記生体組織に前記レーザーヘッドから出射されたレーザー光を照射する過程と、を含むことを特徴とする、請求項1〜18のいずれかに記載のシミュレータを使用した生体組織の処置をシミュレーションする方法。
【請求項1】
3つの併進自由度と3つの回転自由度とを有する実体ハンドルと、
生体組織と仮想ハンドルとを備える処置領域の3次元モデルを表示する画面と、
前記実体ハンドルの3次元の運動を検知する運動検知手段と、
前記運動検知手段によって検知される前記実体ハンドルの運動に基づいて、前記仮想ハンドルが前記生体組織に対する位置関係において前記画面上で動かされるシミュレーションプログラムを備えるコンピュータと、を有する生体組織の処置をシミュレーションするためのシミュレータにおいて、
前記実体ハンドルは前記生体組織を非接触で処置するためのレーザーのレーザー光を出射するレーザーヘッドを模しており、
前記シミュレータは、前記レーザーのレーザーパラメータと前記生体組織の組織パラメータとを入力する入力手段を有し、
前記シミュレーションプログラムは、前記位置関係及び前記レーザーパラメータに基づいて前記生体組織上での前記レーザー光の照射面と該照射面の中でのエネルギー密度の分布とを算出し、
前記シミュレーションプログラムは、前記エネルギー密度の分布と前記組織パラメータとに基づいて前記画面上に物質の除去を表示することを特徴とするシミュレータ。
【請求項2】
スイッチを有し、前記スイッチが作動されている間、前記レーザー光を出射することを特徴とする請求項1に記載のシミュレータ。
【請求項3】
前記スイッチが作動している間、音響信号を発する信号発生手段を有することを特徴とする請求項2に記載のシミュレータ。
【請求項4】
前記スイッチの作動時間を検知する時間検知手段を有することを特徴とする請求項2又は3に記載のシミュレータ。
【請求項5】
前記画面上の表示は、縮小又は拡大されたスケールで表示することができることを特徴とする請求項1〜4のいずれかに記載のシミュレータ。
【請求項6】
前記仮想ハンドルと前記生体組織との間の位置関係が検知されることを特徴する請求項1〜5のいずれかに記載のシミュレータ。
【請求項7】
前記シミュレーションプログラムは、前記画面上に、前記生体組織の断面図において前記物質の除去を表示することを特徴とする請求項1〜6のいずれかに記載のシミュレータ。
【請求項8】
前記シミュレーションプログラムは、前記レーザー光及び前記照射面を表示することを特徴とする請求項1〜7のいずれかに記載のシミュレータ。
【請求項9】
前記レーザーパラメータは、前記レーザー光の波長、強度、開き角、及び/又はレーザー光の種類を含むことを特徴とする請求項1〜8のいずれかに記載のシミュレータ。
【請求項10】
前記組織パラメータは、物質組成、硬さ、色、分光反射率、及び/又は表面の粗さを含むことを特徴とする請求項1〜9のいずれかに記載のシミュレータ。
【請求項11】
前記組織は、硬質の歯系組織又は軟質の歯系組織であることを特徴とする請求項1〜10のいずれかに記載のシミュレータ。
【請求項12】
前記組織は歯肉組織であることを特徴とする請求項1〜10のいずれかに記載のシミュレータ。
【請求項13】
前記レーザーはNd:YAGレーザー、Ho:YAGレーザー、又はEr:YAGレーザーであることを特徴とする請求項1〜12のいずれかに記載のシミュレータ。
【請求項14】
前記スイッチは、前記ハンドルに組み込まれたものであるか、又は足踏みスイッチであることを特徴とする請求項2〜13のいずれかに記載のシミュレータ。
【請求項15】
前記ハンドルと前記組織との間の望まない接触を通知する通知手段を有することを特徴とする請求項1〜14のいずれかに記載のシミュレータ。
【請求項16】
前記仮想ハンドルが前記生体組織から最低限の距離だけ離れた状態でなくなる方向への前記実体ハンドルの運動を阻止する阻止手段を有することを特徴とする請求項1〜15のいずれかに記載のシミュレータ。
【請求項17】
前記生体組織及び前記実体ハンドルに対する位置関係において前記画面に表示される少なくとも1つの別の実体ハンドルをさらに有することを特徴とする請求項1〜16のいずれかに記載のシミュレータ。
【請求項18】
少なくとも1つの別の運動検知手段を患者及び/又は操作者の頭の運動を検知するためにさらに有し、3次元可視化手段を有することを特徴とする請求項1〜17のいずれかに記載のシミュレータ。
【請求項19】
レーザーヘッドとして設計された実体ハンドルを実体的な6次元位相空間において運動させる過程と、
前記実体ハンドルの運動を、仮想的な6次元位相空間における仮想ハンドルの運動として描写する過程と、
シミュレータの画面上で前記仮想ハンドルの運動を生体組織との位置関係において表現する過程と、
前記生体組織に前記レーザーヘッドから出射されたレーザー光を照射する過程と、を含むことを特徴とする、請求項1〜18のいずれかに記載のシミュレータを使用した生体組織の処置をシミュレーションする方法。
【図1】


【図2】
【図2】
【公表番号】特表2013−517815(P2013−517815A)
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−549349(P2012−549349)
【出願日】平成23年1月19日(2011.1.19)
【国際出願番号】PCT/EP2011/050709
【国際公開番号】WO2011/089164
【国際公開日】平成23年7月28日(2011.7.28)
【出願人】(512168652)
【Fターム(参考)】
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年1月19日(2011.1.19)
【国際出願番号】PCT/EP2011/050709
【国際公開番号】WO2011/089164
【国際公開日】平成23年7月28日(2011.7.28)
【出願人】(512168652)
【Fターム(参考)】
[ Back to top ]