
生体組織特性のマッピング装置
本発明は、多面的な生体組織の組織検査に適した装置を提供する。該装置は、少なくとも1つの触覚センサ装置からなる周期的変位可能体を装着した体管内に配置可能なプローブを備え、該周期的変位可能体は1Hz〜500Hzの範囲の励起周波数帯域幅と、1mm未満の最大ストローク長、および0.01N〜1Nの範囲の変位力を有し、該変位可能体は、少なくとも該励起周波数を制御するための変位コントローラを有する変位装置を備える。変位モニタ装置および変位力モニタ装置に接続され、該変位可能体は、該周期的変位可能体の周期的な変位により該組織に加えられる該変位力による、周期的な圧縮に対する該生体組織の粘弾性の反応をモニタする。本発明には、体管に隣接する生体組織の組織プロファイルを生成する方法、および、本発明の装置を利用した診断方法も含まれる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体組織の組織分析(プロファイリング)の分野に関し、より具体的には、体管に隣接する組織について組織分析する装置に関する。
【背景技術】
【0002】
医師達は、患者の状態を検査したり診断するときに、患者の症状、臨床試験の結果、および様々な有望な療法に対する患者の応答の考察を含む多くのステップを踏む。多くの状態に対して、正確な初期診断により、特に、多くの有望な治療選択肢が存在する場合に、患者を最適な治療コースに導くことができる。このことは、症状がより素早く緩和されるため、患者にとって有益であり、また、症状に適した治療法を見つけるために、患者が連続的な処置を受けなければならない可能性を減少させる。また、より迅速な診断および処置により、患者はより素早くこの手順を済ませ、再診のためにクリニックを訪れる回数を減らせるので、不適切な治療が処方され、時間が浪費されることの頻度を減少させるという観点から、資源の節約および経済的理由の点で、医療制度にとって非常に有益である。
【0003】
多くの組織異常は、患者が典型的で特徴的な症状パターンを示す原因となりうる。例えば、前立腺における異常な組織成分の増殖は、良性の前立腺肥大症(BPH)または前立腺癌における、膀胱排出障害を示す典型的で特徴的な症状のパターンを患者が示す原因となりうる。異常な組織成分は、様々な方法で膀胱排出障害に寄与すると考えられている。器官を構成する組織およびこれらの組織成分の異常に対する洞察を得ることにより、特定の症状の根本的な原因をより正確に診断することができ、よって、より効果的な処置が可能となる。理想的には、この情報を確認するための処置に使用される器具または装置は、低侵襲性であり、患者に対して低リスクであり、かつ、簡単で素早く使用できるとよい。
【0004】
体管に近接する組織の硬さおよび物質を検査するために使用される最もシンプルな技術の一つは、例えば、直腸内、膣内などの体管内に挿入した指を用いる組織の触診に依存している。かかる技術は、非常に主観的であり、検査可能な組織の深さに限度があり、指が体管内をどの程度の深さまで届くかにより制限されるため、明らかに不利である。
【0005】
例えば、米国特許第5265612号、および、米国特許第5107837号に記載されているように、多くの超音波画像診断法を用いる器具が知られている。しかし、これらの器具は、一般的に、マトリックスとの弾性の相違により明らかになる組織異常の発見に用いられる。他の器具では(例えば、米国特許第5785663号)、マトリックスの組織と異なる弾性を有する表面および表面直下の領域を、明らかにするために、プローブ下での圧力分布が用いられている。
【特許文献1】米国特許第5265612号
【特許文献2】米国特許第5107837号
【特許文献3】米国特許第5785663号
【非特許文献1】Gander M J, MacPherson W N, Barton J S, Reuben R L, Jones J D C, Stevens R, Chana K S, Anderson S J, Jones T V.“Embedded micromachined fibre optic Fabry-Perot pressure sensors in aerodynamics applications”, IEEE Sensors 2002.
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、体管に隣接する生体組織の組織構造の検査に使用される現存の器具の不都合を、軽減または解消することである。
【課題を解決するための手段】
【0007】
本発明の第一の態様により、多面的な生体組織の組織構造を検査するのに適した装置が提供される。該装置は、少なくとも1つの触覚センサ装置からなる周期的変位可能体を備える、体管内に配置可能なプローブからなる。該周期的変位可能体は、1Hz〜500KHzの範囲の励起周波数帯域幅と、1mm未満の最大ストローク長、および0.01N〜1Nの範囲の変位力を有する。また、該変位可能体は、該励起周波数およびストローク長を制御する変位コントローラを有する変位装置を備える。該変位体は、変位モニタ装置および力モニタ装置に接続され、該周期的変位可能体の周期的な変位により該組織に加えられる該変位力による、周期的な圧縮に対する該生体組織の粘弾性の反応をモニタする。
【0008】
このように、本発明により、組織の圧縮率、すなわち、組織の粘弾性を共に構成する、組織の弾力性およびその減衰効果をモニタできる装置が提供される。例えば、前立腺の場合、筋肉成分は、ばねのような特性をより有する一方、腺成分は、ダンパとして作用する強い傾向を有する。殆どの生体組織を含めて、ある種の物質は、フックの法則には従わないが、粘弾性を示す。この粘弾性は、以下の式に従って、時変応力σ(t)を、歪み履歴ε(t−Δt)のみならず、時変歪みε(t)に関連づけて記述される。
【数1】
【0009】
式中、D1およびD2は物質の弾性であり、τは固有の時定数である。このような物質が正弦波歪みε=ε^sinωtを受ける時、応力は次式で与えられる。
【数2】
【0010】
このような物質が正弦波歪みを受けると、生体組織を圧縮する本発明の変位可能体の周期的な変位におけるように、歪みおよび応力は、次式により関連付けられる。
【数3】
【0011】
式中、量(E1+iE2)は、動的弾性率に対応する複素数であり、物質の弾性を詳細に説明する。たびたびこの複素数の弾性率は、広く動的弾性率と称され、歪みの振幅に対する応力の振幅の比率として実験で測定される。以後、|E*|または振幅率と称する。
【0012】
1つ以上の組織成分の過剰増殖、または、特定の組織成分の均衡の乱れが病変をもたらす場合がしばしばあるが、本発明の装置は、そのような異なるシナリオ間における特定および識別を支援する。
【0013】
本発明による体管内に配置可能なプローブは、以下の体管に限定されないが、男性および女性の生殖器・泌尿器路、胃腸器路、呼吸器路を含む様々な異なる体管内にまたは沿っての挿入、および、動脈および静脈血管系内への挿入に適した、様々な異なる大きさ、および形状に作製可能である。さらに、このようなプローブはまた、腹腔鏡手術に使用される装置に内蔵することも可能であり、別の方法では得られない触覚フィードバックの代替手段となりうる。
【0014】
一般的に、体管内にある程度容易に入れることができ、その上、体管におおよそ適合する直径を有するように、プローブの寸法は決められる。当然、患者によって備わる体管の大きさは著しく異なる。それと同時に、殆どの体管は、ほぼ全面的に崩壊状態にある場合も含む、実質的に弛緩した状態と、例えば、通常の液体流量が管を通過する、正常な拡張状態と、管壁の完全な状態を危うくすることはないが、管壁を押し離すために通常より非常に大きな程度の力が負荷されている、実質的に拡張した状態との間で、大きくなったり小さくなったりするように、ある程度容易に伸縮可能である。したがって、例えば、成人男性の尿道の場合、通常の平均直径は5mmのオーダーであるが、3.5mm〜7mmの範囲で変動しうる。しかし、尿道の平均直径は、4mm〜10mmの、全面的に弛緩した状態から、実質的に拡張した状態の直径範囲を有することもありうる。
【0015】
典型的には、尿道への挿入に適した装置は、プローブ直径が5mm以下であり、プローブの長さは一般的に1cm〜3cmの範囲であり、好ましくは、約15mmである。このようなプローブは、典型的に長さが25cm〜30cmの細長い体管内に配置可能な配置装置の一端に装着できると好ましい。
【0016】
胃腸器系の管の寸法はずっと大きく、より膨張性であるので、一般的に12mm〜20mmというかなり大きめの直径を有する内視鏡やプローブを収容可能である。本発明による装置は、呼吸器系または血管系の管に挿入するのにも適している。このような系は、幅広い範囲にわたって直径が異なる体管からなる。例えば、呼吸器路の体管は、その直径が、約15mm〜20mmから数ミクロンまで徐々に減少しており、同様に、血管系の太めの血管は、約20mm〜30mmの直径を有し、一方、細めの毛細管はミクロン範囲の直径を有する。したがって、プローブの直径は、プローブを使用する必要がある最小の体管の大きさに対応する寸法を有するように設計される。例えば、1.5mm〜3mmのプローブ直径を有する装置は、心臓動脈に到達させる場合に適している。プローブを身体に挿入したり、身体の管系に通すとき、プローブを当該の管に到達させることが可能な、十分な長さおよび適切な直径を有する細長い配置装置に、このような装置のプローブを装着することができる。
【0017】
周期的変位可能体は、検査の繰返し、振動を有する変位、および、周りの組織に接触したり圧縮することから受ける圧力に耐えうる十分な耐久性を有する材料から選択される、実質的に強固であり不活性な材料からなる。好ましくは、材料が、アレルギーまたは過敏反応のような、装置に対する有害反応の可能性を減少させる生体適合性を有するべきであり、好ましくは無毒性であるべきである。材料が生体耐性を有し、使用中に、尿素、アミラーゼ、塩酸のような、身体内で遭遇する生体液、化学薬品、酵素などとの接触に耐え得ることが好ましい。適切な材料として、ステンレス鋼のような適切な金属類、ポリエチレン、ポリプロピレンのようなポリアルケン類を含む天然ポリマーまたは合成ポリマー、シリコンゴムを含む天然ゴムまたは合成ゴムがある。上述したような適切な生体適合性および生体耐性物質が塗布されていたり、またはこれらにより被覆されている場合には、他の材料も同様に用いることが可能である。
【0018】
体管壁に接触したとき、比較的低い摩擦力を有する材料を用いるのが有利である。好ましくはまたは追加的に、プローブは水性の潤滑ゲルのような生理学的に許容される潤滑剤と共に用いることが可能である。
【0019】
生体成分内に挿入されたり、生体成分と接触する装置およびプローブのその他の部品もまた、一般に、生体適合性、生体耐性物質からなる。
【0020】
変位可能体の周期的な変位を、様々な手段により作動させることができる。例えば、適切な加圧流体(油圧または空気圧式)回路;適切な、柔軟な駆動軸を有し、回転運動を往復運動に変換するためのカム、クランクなどのような装置を用いる近位装着(細長いプローブ配置装置の外側−患者の身体の外の末端に装着)のモータまたは遠位装着のモータのような機械システム;および圧電アクチュエータである。
【0021】
加圧流体回路を利用するものでは、装置の使用中に、検査を受けている患者の体外にポンプまたは他の加圧流体源を有すると便利である。経時変化する変位力および変位についても、患者体外で感知し制御することが可能であるので、身体内に挿入する必要のある装置の嵩を最小化できる。
【0022】
微細加工可能なシリコンまたはニッケルのような強固な材料で形成された微小ピストンおよびシューにより変位を付与することは好都合である。微小ピストンの直径は、一般的にプローブの直径のおよそ5分の1である。油圧または空気圧あるいは、上述したタイプの適切な機械システムは、例えば、微小ピストンおよびシューを作動させるのに用いることが可能である。加圧流体回路を用いるものでは、そのようなアクチュエータに関連する力は、駆動流体圧を用いて測定できる。機械システムを用いるものでは、力変換器をシステムに内蔵し、変位力を測定することが可能である。このような力変換器は、力を測定するために、圧電抵抗歪みゲージおよびこれに懸垂しているピストンを内蔵しているエッチング処理されたシリコンのダイヤフラムから微細加工することが可能である。変位を測定するための、当業者には周知の多くのシステムも存在し、これらは、変位可能体の一部に対応する光ファイバを用いる距離の干渉計測の利用を含む。
【0023】
変位可能体の圧電作動変位を組み込む装置は、特に、圧電装置が、プローブ内に容易に内蔵が可能であるので、装置の小型化および使用の簡便さを高めることができる。一般に、石英、ロッシェル塩のような圧電性質を有するいずれかの圧電材料、または、好ましくはジルコン酸チタン酸鉛(PZT)を基にした材料を使用できる。圧電材料は、圧電抵抗歪みゲージを組み込んでいるエッチング処理されたシリコンの微細加工されたダイヤフラム上に圧電材料を装着することにより、力変換器と共に備えることが可能である。あるいは、変位を、ピストンまたはシューにおいて往復運動を提供するために、上記タイプの機械システムに接続された小径の静電または電磁回転モータのような機械システムにより提供してもよい。モータの電流および電圧特性を、作動変位力を推定するために用いることもできる。
【0024】
異なる組織の粘弾性の性質を検査するのに用いられる、変位周波数、変位ストローク長、および変位力値の範囲は変化する。例えば、高コラーゲン含有量を有する変位可能体による変位に対し、大きな抵抗を与える高密な構造および構成を有する組織は、一般に、腺物質のような低密でより容易に変位可能な組織より、これらの組織に印加される変位力がより大きい。
【0025】
各々の組織のタイプに適切な変位周波数、変位ストローク長、および、変位力の範囲は、組織成分、または、特定の対象となるその他の特性因子を様々な割合で含む一連の試料を用いて、実験的に容易に決定することができる。例えば、プローブは、近表面の癌、癌の性質(拡散型か集中型か、どのくらい発達しているか、など)を探索したり、または、動脈プラークの石灰化の程度を査定するのに有用である。
【0026】
触覚センサ装置は、一般に装置の使用中に圧縮されている組織の近位にあり、また、組織に直接接触していることが好ましい。触覚センサ装置のセンサは、プローブの変位可能体内に組み込まれていることが好ましい。好ましくは、センサ装置は、圧縮されている組織により受ける動的応力および動的歪みを検知することが可能である。経時変化する力、および経時変化する変位の測定は、経時変化する応力および経時変化する歪みを特定するのに用いられる。
【数4】
【数5】
【数6】
【0027】
上述した式によると、各作動の周波数に対して、動的弾性率の成分(E1、E2)の値は、経時変化する応力および経時変化する歪みの振幅の比率、並びに、応力と歪みとの間の位相差から得ることができる。周波数に関するこれら成分の変動は、その後、圧縮されている組織を特徴づける手段として用いることができる。実際、動的弾性率のこれらの値は、前立腺肥大症(BPH)または癌に冒されている前立腺組織を、典型的に正常な前立腺と区別する。
【0028】
一般に、装置の変位可能体は、変位力を印加する固定された接触表面領域を有する。しかし、本発明の代替形態では、代替のプローブの変位可能体を単純に手動で交換することにより、変位可能体の寸法を変更することができる。あるいは、装置のプローブに、当分野で周知の技術により、寸法を制御できる、拡縮可能な変位可能体を備えてもよい。
【0029】
多くの適切な力検知器は、一体型歪みゲージを有する、エッチング処理されたシリコンのダイヤフラムを含む変位可能体に内蔵が可能である。あるいは、力検知器を、変位制御装置内に、または、パワーソースに組み込んでもよい。例えば、油圧作動が利用されているものでは、分析されている組織により受ける力を、入力された力または油圧流体中の圧力の情報から簡単に決定することができる。
【0030】
変位制御される装置を利用することが便利である。この装置は、位置が制御されるアクチュエータにより変位が送達されるタイプのものである。したがって、アクチュエータに対する制御信号を、動的変位を測定するために用いることが可能である。該アクチュエータは、強固な形状であることが好ましい。便利なアクチュエータは、電磁シェーカまたはピストンポンプ(適切な油圧流体回路を介して、管の内部に油圧流体圧力を送る油圧ピストンを作動させるため、体外での使用にのみ適している)、カム昇降機構に遠隔接続されているミニ回転モータ、および、組織上である程度直接的に作動するためにプローブに装着されている圧電結晶を含む。
【0031】
装置は、典型的に、検査を受けている身体の外部に処理装置を備えており、この処理装置は、少なくとも1つの動的弾性率を生成する入力データおよび出力データ、並びに、振幅比率を処理する。一般的に、干渉を最小化するために、混合周波数変位を適用するが、多くの変位サイクルは、各周波数で単一部位に適用される。時間関数としての応力および歪みの測定値は、その後、信号を平均値化し、各周波数での位相差、並びに、振幅比率が決定され、各周波数に対する動的弾性率の値を出す。動的弾性率は複素弾性率と同義である。
【0032】
様々な異なる振動周波数で周期的な変位を繰り返すことより、組織に特徴的な動的弾性率、または複素弾性率が生成される。変位可能体およびプローブを、組織の表面で異なる位置に容易に移動させることが可能であり、組織の複数の領域を分析するために組織の周期的変位が繰り返され機械的応答の表面輪郭プロファイルを提供する。このようなプロファイルは、管内で変位可能体を軸方向にまたは円周方向に移動させることにより、あるいは、軸方向におよび/または円周方向に分布される、多数の変位可能体を備えることにより生成される。
【0033】
プロファイルまたはマップは、ビデオディスプレイ装置(VDU)画面または印刷装置またはプロッティング装置のような装置に接続された、いずれかの適切な表示装置を介して表示可能である。
【0034】
好ましくは、装置は、既知の組織像に関する組織プロファイルまたはマップの参照データベースを備え、その既知の組織像に対するその後の組織についての比較または評価をなすことができる。そのような設備では、コンピュータが生成する組織の組織像の説明が提供され、多少の診断指標さえ提供されうる。
【0035】
なお、物質の粘弾性の完全な記述が動的弾性率に含まれる一方、実質的に有益な情報もまた振幅比率(|E*|)から入手可能であり、これは時として大まかに(正確ではなく)「動的弾性率」とも称される。この比率は、所定の周波数での歪みの振幅に対する応力の振幅の比率として簡単に入手可能であり、動的弾性率の「減衰」成分の反映として、様々な周波数で異なる。
【0036】
良性と悪性の組織との間の著しい差異が、所定の周波数、典型的には1Hz〜30Hzの範囲の周波数での振幅比率(のみ)を検討することにより、識別できることが分かっている。したがって、疑いを避けるために、本発明は、振幅比率(のみ)をモニタするための方法および装置も包含する。
【0037】
本発明の第二態様は、管に隣接する生体組織の組織プロファイルを生成する、以下のステップからなる方法を提供する。
【0038】
a)本発明による装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置で、該生体組織の体管表面と接触させる、
c)該体管表面全域の該接触位置で、該生体組織を周期的に圧縮するように、1Hz〜500Hzの励起周波数帯域幅、1mm未満の最大ストローク、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各表面接触組織の位置での該組織の粘弾性応答をモニタリングする、および、
e)該体管表面全域の組織の粘弾性応答のプロファイルを生成する。
【発明の効果】
【0039】
本発明の方法を利用して、所定の組織の粘弾性についての情報を入手することが可能である。この組織の性質は組織型依存性であり、一部の組織は、より圧縮可能で弾性があるが、他の組織は、力が除去されると上昇した減衰効果を有し、圧縮されていない寸法に戻るのにより長く時間が掛かる。本発明による方法は、従って、組織の組織学的構成を表示するのに用いることが可能である。
【0040】
このような方法は、例えば、良性前立腺肥大症(BPH)では、膀胱排出障害を引き起こす組織学的異常を診断する上で医師を支援し、それに応じて適切な処置が処方されることが可能となる。例えば、粘弾性プロファイルによる増大した腺性含有量を有する前立腺は、5−アルファ−還元酵素阻害剤のような腺性物質の量を減少させる薬物療法で、治療が可能である。筋肉含有量が異常で、しかも弛緩できない前立腺は、アルファ−アドレナリン遮断剤のような筋肉弛緩剤を用いて治療が可能である。さらに、前立腺内の良性および悪性の経過から生じる組織の特徴における差異を利用することにより、初期の段階で、適切かつ費用対効果のある治療法を正しく特定することによって、資源のより効果的な利用が、達成可能である。
【0041】
本発明のさらなる態様では、体管に隣接する生体組織の組織学的異常により顕著となる症状を診断する、以下のステップからなる方法を提供する。
【0042】
a)本発明による装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置のうちの連続した領域での該生体組織の体管表面に接触させる、
c)該体管表面全域の該接触位置で、該生体組織を周期的に圧縮するように、1Hz〜500Hzの励起周波数帯域幅、1mm未満の最大ストローク長、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各組織表面接触位置での該組織の粘弾性応答をモニタリングする、
e)該体管表面全域の組織の粘弾性応答のプロファイルを生成する、
f)該生成された粘弾性応答プロファイルを既知の組織学的特徴を有する組織の粘弾性応答プロフィールと比較する。
【発明を実施するための最良の形態】
【0043】
本発明のさらに好適な特徴および利点は、添付の図面を参照して、以下の実施形態および詳細な説明により明らかにされる。
【0044】
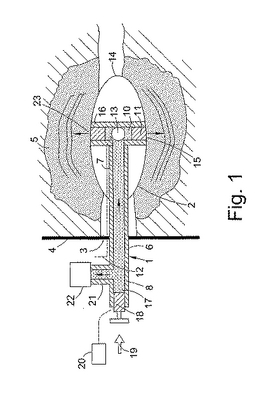
図1は、前立腺5の組織特性を検査するために、患者の陰茎4の尿路3に挿入した、プローブ部2を有する油圧式ピストンを用いた組織特性測定装置1を概略的に示す。さらに詳細に述べると、装置1は、一般に、ポリプロピレンのような物質からなる比較的分厚い壁をめぐらした、部分的に柔軟な細長い油圧流体管6を備え、該油圧流体管6は、近位端部8を押すことにより、尿路3に沿って、該プローブ部2を備える遠位端部7を推進できるように、また、油圧が近位端部8から遠位端部7へ該管に沿って効率的に送達されるように、実質的に寸法が安定している。
【0045】
さらに詳細に述べると、プローブ部2は、伸長する2つ以上のシリンダ部10を有するヘッド部9を有し、シリンダ部10には、各々ピストン11が装着されている。遠隔制御12される分配弁13が、1つまたはそれ以上のシリンダ部10のいずれかを油圧液管6に選択的に接続するためにヘッド部9中に装着される。ヘッド部9は、シリンダ部10の遠位末端部16を閉鎖する弾性的変形可能部15を有するシリコンエラストマのような物質からなるシース14内に入れられており、ピストン11が油圧流体圧力で外側に押されると、ピストン11が、該弾性変形可能なシース部15による戻り付勢力を受けるようになっている。後者は、「機械的に透明」であるように、すなわち、測定されている組織と比較して、小さい動的弾性率を有するように、形成され配置される。
【0046】
油圧流体管6の近位端部8は、可変周波数周期的変位駆動装置19(例えば、電磁作動の線変位変換器)に駆動的に接続している駆動ピストン18を装着し、駆動ピストン18の瞬時の変位を記録するための変位モニタ装置20を備えるシリンダ部17を有する。近位端部8は、駆動ピストン18が変位するときに油圧流体の圧力をモニタリングするために、枝管21に接続されている圧力変換装置22を備える枝管21も有する。
【0047】
装置1の使用中、駆動ピストン18が駆動装置19により変位すると、油圧流体は管6に沿って変位し、対応するヘッドピストン11の変位を生じさせる(油圧液の非圧縮性による)。駆動ピストン18の所定の変位に対する、ヘッドピストン11の周知の変位に基づいて、予め装置を校正することにより、駆動ピストン18の変位を測定することを、ヘッドピストン11の変位を示すことに用いることが可能となる。
【0048】
ヘッドピストン11の変位は、変位される前立腺組織5の一部23のみならず、弾性的変位可能シース部15により制限される。これにより、圧力変換器22により測定される油圧流体中の圧力の増加がもたらされるが、このことは、弾性的変形可能シース部15の弾性のみならず、ヘッドピストン11により変位する前立腺組織部23の弾性にも依存する。変位した組織部23の減衰特性のために、圧力の増加(応力)は、変位(歪み)との位相の不一致となり、振幅と位相角の差異の比率が、動的弾性率を決定するのに用いられる。
【0049】
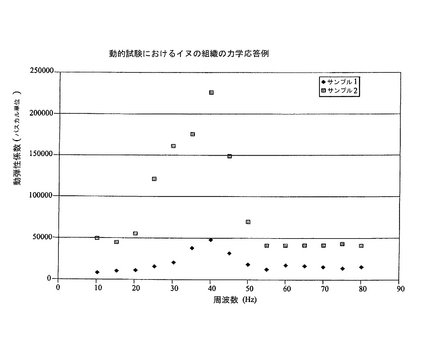
図4は、10Hz〜80Hzの異なる周波数の範囲にわたって、上記の装置の簡略化した形態を用いて、前立腺組織試料を試験管内でのプローブ検査により得た、サンプルのグラフを示す。グラフから分かるように、2つの組織は、動的弾性率対周波数のパターンに明白な差異を示し、約40Hzの周波数において非常に大きな差異が見られる。周波数に対する動的弾性率のパターンは、一連の試験管内での実験により、組織の構造と相関関係を有することが認められている。
【0050】
[実施例1] 良性および悪性の前立腺組織試料の検査
方法
良性の前立腺閉塞(BPO)のために、前立腺の経尿道的切除術(TURP)を受けた10人の患者から52の新しい組織試料を採取した。前立腺の癌(PCa)による閉塞のためのTURPを受けた3人の患者から、16の新しい組織試料を採取した。個々の組織試料は、電気機械的シェーカーを用いて、試料に動的圧縮歪みを加えることにより、直ちに機械的試験にかけ、「動的弾性率」、すなわち「振幅比率」(|E*|)を求めた。良性および悪性の組織試料の|E*|値を、単一要素の分散分析(ANOVA)を用いて比較した。試料をその後ホルマリンに固定し、パラフィンワックスに包埋した。処理済みの組織からの切片内にある上皮組織(ET)をその後、抗前立腺特異抗原(anti−PSA)で免疫組織化学的に染色し、染色されたET内の個々の腺の大きさをコンピュータ化した画像解析で測定した。良性および悪性組織試料内の個々の腺の大きさもまたANOVAを使って比較した。
【0051】
結果
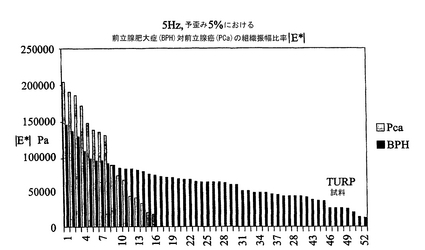
図5は、振幅によりソートされた、上記の装置の簡略化した形態を用いて、ヒト前立腺組織試料を試験管内でプローブ検査して入手し、5Hzの単一周波数で得た振幅比率(動的弾性率の弾性成分)の値を簡略的に示す。より詳細に後述するように、この周波数でのこの動的弾性率の要素は、2つの型の組織を区別するのに十分である。
【0052】
図6は、上記の装置の簡略化した形態を用いて、ヒト前立腺組織試料を試験管内でプローブ検査することで入手し、また、5Hzの単一周波数で得た振幅比率の試料値(動的弾性率の弾性部分)を示す。この場合、プローブ検査された全ての組織試料は、腺物質の含有量が低く(15%未満)なるように事前に選択された。試料の平滑筋含有量を、平滑筋を表すために選択的に染色した顕微鏡画像の染色面積比率を計算して決定した。図6から分かるように、組織学的構成、組織の弾性成分についてさえも、動的弾性率のある面に影響をもち、入手可能な診断情報の質を高める。装置のより全面的な発展型では、そのような情報の範囲は、腺の周りの多くのプローブポイントに基づいて診断を達成するために、測定データに使われる可能性がある。
【0053】
図5および図6に示す結果のより詳細な分析は、BPOのためにTURPを受けた患者から採取した52の組織試料の|E*|(平均±標準誤差(SEM))が62±30KPaであったことを示す。PCaのためにTURPを受けた患者から採集した16の組織試料の|E*|(平均±SEM)は、105±66KPaであった。単一要素ANOVAは、2つのグループの間で統計学的に有意な差異を示した(p=0.0004)。52のBPO試料のET内における平均腺面積は、17,000μm2 であり、16のPCa試料内では、6,500μm2 であった。この場合にも、ANOVAは、2つのグループ間で統計学的に有意な差異を示した(p=1.4*10-5 )。
【0054】
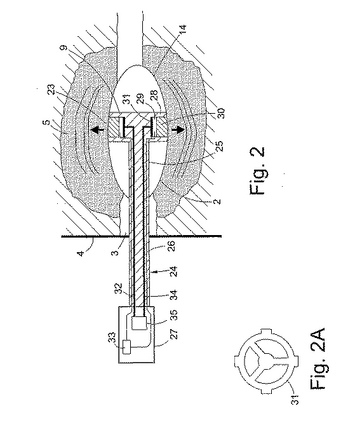
図2は、同様の参照番号により表示されている同様の部品を有する、組織特性測定装置24の図1に類似の概略図である。装置24のプローブ部2は、プローブ部2を制御装置27に接続している、柔軟で実質的に寸法が安定した導管26の遠位端部25に装着されている。
【0055】
プローブ部2は、シース14内に、角度的に分配され放射状に外側に延びた複数のヘッド部品28を持ち、その各々が外側に面しているシュー部品30と応力振動板(ダイヤフラム)31との間にはさまれている圧電セラミック部品29を有する、ヘッド部9を収納する。圧電セラミック部品29は、シュー30の所定の変位を誘発するように、圧電セラミック部品29を作動させるため、様々な周波数の範囲で電気信号を印加するために形成され、配置された電気信号供給装置33に電気的に接続32される。不安定な前立腺組織部23に加えられた力を、例えば、公知の方法(例えば、Ganderらを参照)による光学干渉法を用いて、応力振動板31の歪みをモニタリングすることで監視するが、応力振動板31は、光ファイバ34により光学干渉計装置35に接続されている。圧電セラミック部品29は、歪みゲージの歪み29aをモニタリングするために振動板に装着され、微細加工された圧電抵抗式歪みゲージの形態で、力変換器と共に備えることも可能である。
【0056】
装置の使用中、電気信号を圧電セラミック部品29に印加すると、力が、組織部23に対してシュー30を圧しながらシュー30に加えられる。それと同時に、応力振動板31が対応する反応を受ける。圧電セラミックの変位は、その特性により、また引きこまれた電流に印加する電圧により決定されるが、一方、反応振動板の歪みは、加えられた力を測定する。力と変位は、上述した方法に類似の方法で、作動周波数の範囲にわたる動的弾性率を決定するのに用いられる。
【0057】
図3は、同様の参照番号により表示されている同様の部品を有する、組織特性測定装置1の図1に類似の概略図である。装置1のプローブ部2は、被覆された37、捻れ剛性の可撓性軸駆動伝達部品38の遠位端部36に装着される。カム部品39は、駆動軸により回転するために駆動軸38の遠位末端部36に装着され、反対側に放射状に外側に延びるヘッド部品42内に備えられている円筒41の内部に装着された、ピストン40を外側に周期的に押す。図1の実施形態に示すように、ピストン40は、ヘッド部シース14の弾性変形可能シース部15により、円筒41の内部に係留されるが、それはまたピストン40の戻りばねとしても作動する。組織部23により提供されるピストン40の外側向きの変位に対する抵抗は、駆動軸38の駆動モータ44上に備えられているトルク変換器43によりモニタリングされる。
【0058】
本装置1の使用中に、回転モータの角位置は、軸エンコーダにより、またはモータの電流―電圧特性を用いて、モニタリングすることが可能である。角位置は、直接にピストンの変位を決定する。力は、モータにより出力するトルクから決定され、トルクの電圧−電流特性によるか、または、駆動軸のトルク変換器の組み入れによるかのいずれかにより測定可能である。この場合にも、動的弾性率は、力と変位の時刻歴から決定することができる。
【図面の簡単な説明】
【0059】
【図1】使用中における本発明の組織特性測定装置の一つの実施形態を示す概略断面図である。
【図2】別の実施形態を示す概略断面図である。
【図3】別の実施形態を示す概略断面図である。
【図4】イヌ前立腺の明確に識別できる試料に対する動的弾性率の周波数関数としての2つのプロファイルを示すグラフである。
【図5】一連の良性および癌性のヒト前立腺組織試料に対する単一周波数での振幅比率の値を示すグラフである。
【図6】単一周波数での振幅比率と一連のヒト前立腺組織試料の筋肉含有量との間の関係を示すグラフである。
【技術分野】
【0001】
本発明は、生体組織の組織分析(プロファイリング)の分野に関し、より具体的には、体管に隣接する組織について組織分析する装置に関する。
【背景技術】
【0002】
医師達は、患者の状態を検査したり診断するときに、患者の症状、臨床試験の結果、および様々な有望な療法に対する患者の応答の考察を含む多くのステップを踏む。多くの状態に対して、正確な初期診断により、特に、多くの有望な治療選択肢が存在する場合に、患者を最適な治療コースに導くことができる。このことは、症状がより素早く緩和されるため、患者にとって有益であり、また、症状に適した治療法を見つけるために、患者が連続的な処置を受けなければならない可能性を減少させる。また、より迅速な診断および処置により、患者はより素早くこの手順を済ませ、再診のためにクリニックを訪れる回数を減らせるので、不適切な治療が処方され、時間が浪費されることの頻度を減少させるという観点から、資源の節約および経済的理由の点で、医療制度にとって非常に有益である。
【0003】
多くの組織異常は、患者が典型的で特徴的な症状パターンを示す原因となりうる。例えば、前立腺における異常な組織成分の増殖は、良性の前立腺肥大症(BPH)または前立腺癌における、膀胱排出障害を示す典型的で特徴的な症状のパターンを患者が示す原因となりうる。異常な組織成分は、様々な方法で膀胱排出障害に寄与すると考えられている。器官を構成する組織およびこれらの組織成分の異常に対する洞察を得ることにより、特定の症状の根本的な原因をより正確に診断することができ、よって、より効果的な処置が可能となる。理想的には、この情報を確認するための処置に使用される器具または装置は、低侵襲性であり、患者に対して低リスクであり、かつ、簡単で素早く使用できるとよい。
【0004】
体管に近接する組織の硬さおよび物質を検査するために使用される最もシンプルな技術の一つは、例えば、直腸内、膣内などの体管内に挿入した指を用いる組織の触診に依存している。かかる技術は、非常に主観的であり、検査可能な組織の深さに限度があり、指が体管内をどの程度の深さまで届くかにより制限されるため、明らかに不利である。
【0005】
例えば、米国特許第5265612号、および、米国特許第5107837号に記載されているように、多くの超音波画像診断法を用いる器具が知られている。しかし、これらの器具は、一般的に、マトリックスとの弾性の相違により明らかになる組織異常の発見に用いられる。他の器具では(例えば、米国特許第5785663号)、マトリックスの組織と異なる弾性を有する表面および表面直下の領域を、明らかにするために、プローブ下での圧力分布が用いられている。
【特許文献1】米国特許第5265612号
【特許文献2】米国特許第5107837号
【特許文献3】米国特許第5785663号
【非特許文献1】Gander M J, MacPherson W N, Barton J S, Reuben R L, Jones J D C, Stevens R, Chana K S, Anderson S J, Jones T V.“Embedded micromachined fibre optic Fabry-Perot pressure sensors in aerodynamics applications”, IEEE Sensors 2002.
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、体管に隣接する生体組織の組織構造の検査に使用される現存の器具の不都合を、軽減または解消することである。
【課題を解決するための手段】
【0007】
本発明の第一の態様により、多面的な生体組織の組織構造を検査するのに適した装置が提供される。該装置は、少なくとも1つの触覚センサ装置からなる周期的変位可能体を備える、体管内に配置可能なプローブからなる。該周期的変位可能体は、1Hz〜500KHzの範囲の励起周波数帯域幅と、1mm未満の最大ストローク長、および0.01N〜1Nの範囲の変位力を有する。また、該変位可能体は、該励起周波数およびストローク長を制御する変位コントローラを有する変位装置を備える。該変位体は、変位モニタ装置および力モニタ装置に接続され、該周期的変位可能体の周期的な変位により該組織に加えられる該変位力による、周期的な圧縮に対する該生体組織の粘弾性の反応をモニタする。
【0008】
このように、本発明により、組織の圧縮率、すなわち、組織の粘弾性を共に構成する、組織の弾力性およびその減衰効果をモニタできる装置が提供される。例えば、前立腺の場合、筋肉成分は、ばねのような特性をより有する一方、腺成分は、ダンパとして作用する強い傾向を有する。殆どの生体組織を含めて、ある種の物質は、フックの法則には従わないが、粘弾性を示す。この粘弾性は、以下の式に従って、時変応力σ(t)を、歪み履歴ε(t−Δt)のみならず、時変歪みε(t)に関連づけて記述される。
【数1】
【0009】
式中、D1およびD2は物質の弾性であり、τは固有の時定数である。このような物質が正弦波歪みε=ε^sinωtを受ける時、応力は次式で与えられる。
【数2】
【0010】
このような物質が正弦波歪みを受けると、生体組織を圧縮する本発明の変位可能体の周期的な変位におけるように、歪みおよび応力は、次式により関連付けられる。
【数3】
【0011】
式中、量(E1+iE2)は、動的弾性率に対応する複素数であり、物質の弾性を詳細に説明する。たびたびこの複素数の弾性率は、広く動的弾性率と称され、歪みの振幅に対する応力の振幅の比率として実験で測定される。以後、|E*|または振幅率と称する。
【0012】
1つ以上の組織成分の過剰増殖、または、特定の組織成分の均衡の乱れが病変をもたらす場合がしばしばあるが、本発明の装置は、そのような異なるシナリオ間における特定および識別を支援する。
【0013】
本発明による体管内に配置可能なプローブは、以下の体管に限定されないが、男性および女性の生殖器・泌尿器路、胃腸器路、呼吸器路を含む様々な異なる体管内にまたは沿っての挿入、および、動脈および静脈血管系内への挿入に適した、様々な異なる大きさ、および形状に作製可能である。さらに、このようなプローブはまた、腹腔鏡手術に使用される装置に内蔵することも可能であり、別の方法では得られない触覚フィードバックの代替手段となりうる。
【0014】
一般的に、体管内にある程度容易に入れることができ、その上、体管におおよそ適合する直径を有するように、プローブの寸法は決められる。当然、患者によって備わる体管の大きさは著しく異なる。それと同時に、殆どの体管は、ほぼ全面的に崩壊状態にある場合も含む、実質的に弛緩した状態と、例えば、通常の液体流量が管を通過する、正常な拡張状態と、管壁の完全な状態を危うくすることはないが、管壁を押し離すために通常より非常に大きな程度の力が負荷されている、実質的に拡張した状態との間で、大きくなったり小さくなったりするように、ある程度容易に伸縮可能である。したがって、例えば、成人男性の尿道の場合、通常の平均直径は5mmのオーダーであるが、3.5mm〜7mmの範囲で変動しうる。しかし、尿道の平均直径は、4mm〜10mmの、全面的に弛緩した状態から、実質的に拡張した状態の直径範囲を有することもありうる。
【0015】
典型的には、尿道への挿入に適した装置は、プローブ直径が5mm以下であり、プローブの長さは一般的に1cm〜3cmの範囲であり、好ましくは、約15mmである。このようなプローブは、典型的に長さが25cm〜30cmの細長い体管内に配置可能な配置装置の一端に装着できると好ましい。
【0016】
胃腸器系の管の寸法はずっと大きく、より膨張性であるので、一般的に12mm〜20mmというかなり大きめの直径を有する内視鏡やプローブを収容可能である。本発明による装置は、呼吸器系または血管系の管に挿入するのにも適している。このような系は、幅広い範囲にわたって直径が異なる体管からなる。例えば、呼吸器路の体管は、その直径が、約15mm〜20mmから数ミクロンまで徐々に減少しており、同様に、血管系の太めの血管は、約20mm〜30mmの直径を有し、一方、細めの毛細管はミクロン範囲の直径を有する。したがって、プローブの直径は、プローブを使用する必要がある最小の体管の大きさに対応する寸法を有するように設計される。例えば、1.5mm〜3mmのプローブ直径を有する装置は、心臓動脈に到達させる場合に適している。プローブを身体に挿入したり、身体の管系に通すとき、プローブを当該の管に到達させることが可能な、十分な長さおよび適切な直径を有する細長い配置装置に、このような装置のプローブを装着することができる。
【0017】
周期的変位可能体は、検査の繰返し、振動を有する変位、および、周りの組織に接触したり圧縮することから受ける圧力に耐えうる十分な耐久性を有する材料から選択される、実質的に強固であり不活性な材料からなる。好ましくは、材料が、アレルギーまたは過敏反応のような、装置に対する有害反応の可能性を減少させる生体適合性を有するべきであり、好ましくは無毒性であるべきである。材料が生体耐性を有し、使用中に、尿素、アミラーゼ、塩酸のような、身体内で遭遇する生体液、化学薬品、酵素などとの接触に耐え得ることが好ましい。適切な材料として、ステンレス鋼のような適切な金属類、ポリエチレン、ポリプロピレンのようなポリアルケン類を含む天然ポリマーまたは合成ポリマー、シリコンゴムを含む天然ゴムまたは合成ゴムがある。上述したような適切な生体適合性および生体耐性物質が塗布されていたり、またはこれらにより被覆されている場合には、他の材料も同様に用いることが可能である。
【0018】
体管壁に接触したとき、比較的低い摩擦力を有する材料を用いるのが有利である。好ましくはまたは追加的に、プローブは水性の潤滑ゲルのような生理学的に許容される潤滑剤と共に用いることが可能である。
【0019】
生体成分内に挿入されたり、生体成分と接触する装置およびプローブのその他の部品もまた、一般に、生体適合性、生体耐性物質からなる。
【0020】
変位可能体の周期的な変位を、様々な手段により作動させることができる。例えば、適切な加圧流体(油圧または空気圧式)回路;適切な、柔軟な駆動軸を有し、回転運動を往復運動に変換するためのカム、クランクなどのような装置を用いる近位装着(細長いプローブ配置装置の外側−患者の身体の外の末端に装着)のモータまたは遠位装着のモータのような機械システム;および圧電アクチュエータである。
【0021】
加圧流体回路を利用するものでは、装置の使用中に、検査を受けている患者の体外にポンプまたは他の加圧流体源を有すると便利である。経時変化する変位力および変位についても、患者体外で感知し制御することが可能であるので、身体内に挿入する必要のある装置の嵩を最小化できる。
【0022】
微細加工可能なシリコンまたはニッケルのような強固な材料で形成された微小ピストンおよびシューにより変位を付与することは好都合である。微小ピストンの直径は、一般的にプローブの直径のおよそ5分の1である。油圧または空気圧あるいは、上述したタイプの適切な機械システムは、例えば、微小ピストンおよびシューを作動させるのに用いることが可能である。加圧流体回路を用いるものでは、そのようなアクチュエータに関連する力は、駆動流体圧を用いて測定できる。機械システムを用いるものでは、力変換器をシステムに内蔵し、変位力を測定することが可能である。このような力変換器は、力を測定するために、圧電抵抗歪みゲージおよびこれに懸垂しているピストンを内蔵しているエッチング処理されたシリコンのダイヤフラムから微細加工することが可能である。変位を測定するための、当業者には周知の多くのシステムも存在し、これらは、変位可能体の一部に対応する光ファイバを用いる距離の干渉計測の利用を含む。
【0023】
変位可能体の圧電作動変位を組み込む装置は、特に、圧電装置が、プローブ内に容易に内蔵が可能であるので、装置の小型化および使用の簡便さを高めることができる。一般に、石英、ロッシェル塩のような圧電性質を有するいずれかの圧電材料、または、好ましくはジルコン酸チタン酸鉛(PZT)を基にした材料を使用できる。圧電材料は、圧電抵抗歪みゲージを組み込んでいるエッチング処理されたシリコンの微細加工されたダイヤフラム上に圧電材料を装着することにより、力変換器と共に備えることが可能である。あるいは、変位を、ピストンまたはシューにおいて往復運動を提供するために、上記タイプの機械システムに接続された小径の静電または電磁回転モータのような機械システムにより提供してもよい。モータの電流および電圧特性を、作動変位力を推定するために用いることもできる。
【0024】
異なる組織の粘弾性の性質を検査するのに用いられる、変位周波数、変位ストローク長、および変位力値の範囲は変化する。例えば、高コラーゲン含有量を有する変位可能体による変位に対し、大きな抵抗を与える高密な構造および構成を有する組織は、一般に、腺物質のような低密でより容易に変位可能な組織より、これらの組織に印加される変位力がより大きい。
【0025】
各々の組織のタイプに適切な変位周波数、変位ストローク長、および、変位力の範囲は、組織成分、または、特定の対象となるその他の特性因子を様々な割合で含む一連の試料を用いて、実験的に容易に決定することができる。例えば、プローブは、近表面の癌、癌の性質(拡散型か集中型か、どのくらい発達しているか、など)を探索したり、または、動脈プラークの石灰化の程度を査定するのに有用である。
【0026】
触覚センサ装置は、一般に装置の使用中に圧縮されている組織の近位にあり、また、組織に直接接触していることが好ましい。触覚センサ装置のセンサは、プローブの変位可能体内に組み込まれていることが好ましい。好ましくは、センサ装置は、圧縮されている組織により受ける動的応力および動的歪みを検知することが可能である。経時変化する力、および経時変化する変位の測定は、経時変化する応力および経時変化する歪みを特定するのに用いられる。
【数4】
【数5】
【数6】
【0027】
上述した式によると、各作動の周波数に対して、動的弾性率の成分(E1、E2)の値は、経時変化する応力および経時変化する歪みの振幅の比率、並びに、応力と歪みとの間の位相差から得ることができる。周波数に関するこれら成分の変動は、その後、圧縮されている組織を特徴づける手段として用いることができる。実際、動的弾性率のこれらの値は、前立腺肥大症(BPH)または癌に冒されている前立腺組織を、典型的に正常な前立腺と区別する。
【0028】
一般に、装置の変位可能体は、変位力を印加する固定された接触表面領域を有する。しかし、本発明の代替形態では、代替のプローブの変位可能体を単純に手動で交換することにより、変位可能体の寸法を変更することができる。あるいは、装置のプローブに、当分野で周知の技術により、寸法を制御できる、拡縮可能な変位可能体を備えてもよい。
【0029】
多くの適切な力検知器は、一体型歪みゲージを有する、エッチング処理されたシリコンのダイヤフラムを含む変位可能体に内蔵が可能である。あるいは、力検知器を、変位制御装置内に、または、パワーソースに組み込んでもよい。例えば、油圧作動が利用されているものでは、分析されている組織により受ける力を、入力された力または油圧流体中の圧力の情報から簡単に決定することができる。
【0030】
変位制御される装置を利用することが便利である。この装置は、位置が制御されるアクチュエータにより変位が送達されるタイプのものである。したがって、アクチュエータに対する制御信号を、動的変位を測定するために用いることが可能である。該アクチュエータは、強固な形状であることが好ましい。便利なアクチュエータは、電磁シェーカまたはピストンポンプ(適切な油圧流体回路を介して、管の内部に油圧流体圧力を送る油圧ピストンを作動させるため、体外での使用にのみ適している)、カム昇降機構に遠隔接続されているミニ回転モータ、および、組織上である程度直接的に作動するためにプローブに装着されている圧電結晶を含む。
【0031】
装置は、典型的に、検査を受けている身体の外部に処理装置を備えており、この処理装置は、少なくとも1つの動的弾性率を生成する入力データおよび出力データ、並びに、振幅比率を処理する。一般的に、干渉を最小化するために、混合周波数変位を適用するが、多くの変位サイクルは、各周波数で単一部位に適用される。時間関数としての応力および歪みの測定値は、その後、信号を平均値化し、各周波数での位相差、並びに、振幅比率が決定され、各周波数に対する動的弾性率の値を出す。動的弾性率は複素弾性率と同義である。
【0032】
様々な異なる振動周波数で周期的な変位を繰り返すことより、組織に特徴的な動的弾性率、または複素弾性率が生成される。変位可能体およびプローブを、組織の表面で異なる位置に容易に移動させることが可能であり、組織の複数の領域を分析するために組織の周期的変位が繰り返され機械的応答の表面輪郭プロファイルを提供する。このようなプロファイルは、管内で変位可能体を軸方向にまたは円周方向に移動させることにより、あるいは、軸方向におよび/または円周方向に分布される、多数の変位可能体を備えることにより生成される。
【0033】
プロファイルまたはマップは、ビデオディスプレイ装置(VDU)画面または印刷装置またはプロッティング装置のような装置に接続された、いずれかの適切な表示装置を介して表示可能である。
【0034】
好ましくは、装置は、既知の組織像に関する組織プロファイルまたはマップの参照データベースを備え、その既知の組織像に対するその後の組織についての比較または評価をなすことができる。そのような設備では、コンピュータが生成する組織の組織像の説明が提供され、多少の診断指標さえ提供されうる。
【0035】
なお、物質の粘弾性の完全な記述が動的弾性率に含まれる一方、実質的に有益な情報もまた振幅比率(|E*|)から入手可能であり、これは時として大まかに(正確ではなく)「動的弾性率」とも称される。この比率は、所定の周波数での歪みの振幅に対する応力の振幅の比率として簡単に入手可能であり、動的弾性率の「減衰」成分の反映として、様々な周波数で異なる。
【0036】
良性と悪性の組織との間の著しい差異が、所定の周波数、典型的には1Hz〜30Hzの範囲の周波数での振幅比率(のみ)を検討することにより、識別できることが分かっている。したがって、疑いを避けるために、本発明は、振幅比率(のみ)をモニタするための方法および装置も包含する。
【0037】
本発明の第二態様は、管に隣接する生体組織の組織プロファイルを生成する、以下のステップからなる方法を提供する。
【0038】
a)本発明による装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置で、該生体組織の体管表面と接触させる、
c)該体管表面全域の該接触位置で、該生体組織を周期的に圧縮するように、1Hz〜500Hzの励起周波数帯域幅、1mm未満の最大ストローク、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各表面接触組織の位置での該組織の粘弾性応答をモニタリングする、および、
e)該体管表面全域の組織の粘弾性応答のプロファイルを生成する。
【発明の効果】
【0039】
本発明の方法を利用して、所定の組織の粘弾性についての情報を入手することが可能である。この組織の性質は組織型依存性であり、一部の組織は、より圧縮可能で弾性があるが、他の組織は、力が除去されると上昇した減衰効果を有し、圧縮されていない寸法に戻るのにより長く時間が掛かる。本発明による方法は、従って、組織の組織学的構成を表示するのに用いることが可能である。
【0040】
このような方法は、例えば、良性前立腺肥大症(BPH)では、膀胱排出障害を引き起こす組織学的異常を診断する上で医師を支援し、それに応じて適切な処置が処方されることが可能となる。例えば、粘弾性プロファイルによる増大した腺性含有量を有する前立腺は、5−アルファ−還元酵素阻害剤のような腺性物質の量を減少させる薬物療法で、治療が可能である。筋肉含有量が異常で、しかも弛緩できない前立腺は、アルファ−アドレナリン遮断剤のような筋肉弛緩剤を用いて治療が可能である。さらに、前立腺内の良性および悪性の経過から生じる組織の特徴における差異を利用することにより、初期の段階で、適切かつ費用対効果のある治療法を正しく特定することによって、資源のより効果的な利用が、達成可能である。
【0041】
本発明のさらなる態様では、体管に隣接する生体組織の組織学的異常により顕著となる症状を診断する、以下のステップからなる方法を提供する。
【0042】
a)本発明による装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置のうちの連続した領域での該生体組織の体管表面に接触させる、
c)該体管表面全域の該接触位置で、該生体組織を周期的に圧縮するように、1Hz〜500Hzの励起周波数帯域幅、1mm未満の最大ストローク長、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各組織表面接触位置での該組織の粘弾性応答をモニタリングする、
e)該体管表面全域の組織の粘弾性応答のプロファイルを生成する、
f)該生成された粘弾性応答プロファイルを既知の組織学的特徴を有する組織の粘弾性応答プロフィールと比較する。
【発明を実施するための最良の形態】
【0043】
本発明のさらに好適な特徴および利点は、添付の図面を参照して、以下の実施形態および詳細な説明により明らかにされる。
【0044】
図1は、前立腺5の組織特性を検査するために、患者の陰茎4の尿路3に挿入した、プローブ部2を有する油圧式ピストンを用いた組織特性測定装置1を概略的に示す。さらに詳細に述べると、装置1は、一般に、ポリプロピレンのような物質からなる比較的分厚い壁をめぐらした、部分的に柔軟な細長い油圧流体管6を備え、該油圧流体管6は、近位端部8を押すことにより、尿路3に沿って、該プローブ部2を備える遠位端部7を推進できるように、また、油圧が近位端部8から遠位端部7へ該管に沿って効率的に送達されるように、実質的に寸法が安定している。
【0045】
さらに詳細に述べると、プローブ部2は、伸長する2つ以上のシリンダ部10を有するヘッド部9を有し、シリンダ部10には、各々ピストン11が装着されている。遠隔制御12される分配弁13が、1つまたはそれ以上のシリンダ部10のいずれかを油圧液管6に選択的に接続するためにヘッド部9中に装着される。ヘッド部9は、シリンダ部10の遠位末端部16を閉鎖する弾性的変形可能部15を有するシリコンエラストマのような物質からなるシース14内に入れられており、ピストン11が油圧流体圧力で外側に押されると、ピストン11が、該弾性変形可能なシース部15による戻り付勢力を受けるようになっている。後者は、「機械的に透明」であるように、すなわち、測定されている組織と比較して、小さい動的弾性率を有するように、形成され配置される。
【0046】
油圧流体管6の近位端部8は、可変周波数周期的変位駆動装置19(例えば、電磁作動の線変位変換器)に駆動的に接続している駆動ピストン18を装着し、駆動ピストン18の瞬時の変位を記録するための変位モニタ装置20を備えるシリンダ部17を有する。近位端部8は、駆動ピストン18が変位するときに油圧流体の圧力をモニタリングするために、枝管21に接続されている圧力変換装置22を備える枝管21も有する。
【0047】
装置1の使用中、駆動ピストン18が駆動装置19により変位すると、油圧流体は管6に沿って変位し、対応するヘッドピストン11の変位を生じさせる(油圧液の非圧縮性による)。駆動ピストン18の所定の変位に対する、ヘッドピストン11の周知の変位に基づいて、予め装置を校正することにより、駆動ピストン18の変位を測定することを、ヘッドピストン11の変位を示すことに用いることが可能となる。
【0048】
ヘッドピストン11の変位は、変位される前立腺組織5の一部23のみならず、弾性的変位可能シース部15により制限される。これにより、圧力変換器22により測定される油圧流体中の圧力の増加がもたらされるが、このことは、弾性的変形可能シース部15の弾性のみならず、ヘッドピストン11により変位する前立腺組織部23の弾性にも依存する。変位した組織部23の減衰特性のために、圧力の増加(応力)は、変位(歪み)との位相の不一致となり、振幅と位相角の差異の比率が、動的弾性率を決定するのに用いられる。
【0049】
図4は、10Hz〜80Hzの異なる周波数の範囲にわたって、上記の装置の簡略化した形態を用いて、前立腺組織試料を試験管内でのプローブ検査により得た、サンプルのグラフを示す。グラフから分かるように、2つの組織は、動的弾性率対周波数のパターンに明白な差異を示し、約40Hzの周波数において非常に大きな差異が見られる。周波数に対する動的弾性率のパターンは、一連の試験管内での実験により、組織の構造と相関関係を有することが認められている。
【0050】
[実施例1] 良性および悪性の前立腺組織試料の検査
方法
良性の前立腺閉塞(BPO)のために、前立腺の経尿道的切除術(TURP)を受けた10人の患者から52の新しい組織試料を採取した。前立腺の癌(PCa)による閉塞のためのTURPを受けた3人の患者から、16の新しい組織試料を採取した。個々の組織試料は、電気機械的シェーカーを用いて、試料に動的圧縮歪みを加えることにより、直ちに機械的試験にかけ、「動的弾性率」、すなわち「振幅比率」(|E*|)を求めた。良性および悪性の組織試料の|E*|値を、単一要素の分散分析(ANOVA)を用いて比較した。試料をその後ホルマリンに固定し、パラフィンワックスに包埋した。処理済みの組織からの切片内にある上皮組織(ET)をその後、抗前立腺特異抗原(anti−PSA)で免疫組織化学的に染色し、染色されたET内の個々の腺の大きさをコンピュータ化した画像解析で測定した。良性および悪性組織試料内の個々の腺の大きさもまたANOVAを使って比較した。
【0051】
結果
図5は、振幅によりソートされた、上記の装置の簡略化した形態を用いて、ヒト前立腺組織試料を試験管内でプローブ検査して入手し、5Hzの単一周波数で得た振幅比率(動的弾性率の弾性成分)の値を簡略的に示す。より詳細に後述するように、この周波数でのこの動的弾性率の要素は、2つの型の組織を区別するのに十分である。
【0052】
図6は、上記の装置の簡略化した形態を用いて、ヒト前立腺組織試料を試験管内でプローブ検査することで入手し、また、5Hzの単一周波数で得た振幅比率の試料値(動的弾性率の弾性部分)を示す。この場合、プローブ検査された全ての組織試料は、腺物質の含有量が低く(15%未満)なるように事前に選択された。試料の平滑筋含有量を、平滑筋を表すために選択的に染色した顕微鏡画像の染色面積比率を計算して決定した。図6から分かるように、組織学的構成、組織の弾性成分についてさえも、動的弾性率のある面に影響をもち、入手可能な診断情報の質を高める。装置のより全面的な発展型では、そのような情報の範囲は、腺の周りの多くのプローブポイントに基づいて診断を達成するために、測定データに使われる可能性がある。
【0053】
図5および図6に示す結果のより詳細な分析は、BPOのためにTURPを受けた患者から採取した52の組織試料の|E*|(平均±標準誤差(SEM))が62±30KPaであったことを示す。PCaのためにTURPを受けた患者から採集した16の組織試料の|E*|(平均±SEM)は、105±66KPaであった。単一要素ANOVAは、2つのグループの間で統計学的に有意な差異を示した(p=0.0004)。52のBPO試料のET内における平均腺面積は、17,000μm2 であり、16のPCa試料内では、6,500μm2 であった。この場合にも、ANOVAは、2つのグループ間で統計学的に有意な差異を示した(p=1.4*10-5 )。
【0054】
図2は、同様の参照番号により表示されている同様の部品を有する、組織特性測定装置24の図1に類似の概略図である。装置24のプローブ部2は、プローブ部2を制御装置27に接続している、柔軟で実質的に寸法が安定した導管26の遠位端部25に装着されている。
【0055】
プローブ部2は、シース14内に、角度的に分配され放射状に外側に延びた複数のヘッド部品28を持ち、その各々が外側に面しているシュー部品30と応力振動板(ダイヤフラム)31との間にはさまれている圧電セラミック部品29を有する、ヘッド部9を収納する。圧電セラミック部品29は、シュー30の所定の変位を誘発するように、圧電セラミック部品29を作動させるため、様々な周波数の範囲で電気信号を印加するために形成され、配置された電気信号供給装置33に電気的に接続32される。不安定な前立腺組織部23に加えられた力を、例えば、公知の方法(例えば、Ganderらを参照)による光学干渉法を用いて、応力振動板31の歪みをモニタリングすることで監視するが、応力振動板31は、光ファイバ34により光学干渉計装置35に接続されている。圧電セラミック部品29は、歪みゲージの歪み29aをモニタリングするために振動板に装着され、微細加工された圧電抵抗式歪みゲージの形態で、力変換器と共に備えることも可能である。
【0056】
装置の使用中、電気信号を圧電セラミック部品29に印加すると、力が、組織部23に対してシュー30を圧しながらシュー30に加えられる。それと同時に、応力振動板31が対応する反応を受ける。圧電セラミックの変位は、その特性により、また引きこまれた電流に印加する電圧により決定されるが、一方、反応振動板の歪みは、加えられた力を測定する。力と変位は、上述した方法に類似の方法で、作動周波数の範囲にわたる動的弾性率を決定するのに用いられる。
【0057】
図3は、同様の参照番号により表示されている同様の部品を有する、組織特性測定装置1の図1に類似の概略図である。装置1のプローブ部2は、被覆された37、捻れ剛性の可撓性軸駆動伝達部品38の遠位端部36に装着される。カム部品39は、駆動軸により回転するために駆動軸38の遠位末端部36に装着され、反対側に放射状に外側に延びるヘッド部品42内に備えられている円筒41の内部に装着された、ピストン40を外側に周期的に押す。図1の実施形態に示すように、ピストン40は、ヘッド部シース14の弾性変形可能シース部15により、円筒41の内部に係留されるが、それはまたピストン40の戻りばねとしても作動する。組織部23により提供されるピストン40の外側向きの変位に対する抵抗は、駆動軸38の駆動モータ44上に備えられているトルク変換器43によりモニタリングされる。
【0058】
本装置1の使用中に、回転モータの角位置は、軸エンコーダにより、またはモータの電流―電圧特性を用いて、モニタリングすることが可能である。角位置は、直接にピストンの変位を決定する。力は、モータにより出力するトルクから決定され、トルクの電圧−電流特性によるか、または、駆動軸のトルク変換器の組み入れによるかのいずれかにより測定可能である。この場合にも、動的弾性率は、力と変位の時刻歴から決定することができる。
【図面の簡単な説明】
【0059】
【図1】使用中における本発明の組織特性測定装置の一つの実施形態を示す概略断面図である。
【図2】別の実施形態を示す概略断面図である。
【図3】別の実施形態を示す概略断面図である。
【図4】イヌ前立腺の明確に識別できる試料に対する動的弾性率の周波数関数としての2つのプロファイルを示すグラフである。
【図5】一連の良性および癌性のヒト前立腺組織試料に対する単一周波数での振幅比率の値を示すグラフである。
【図6】単一周波数での振幅比率と一連のヒト前立腺組織試料の筋肉含有量との間の関係を示すグラフである。
【特許請求の範囲】
【請求項1】
少なくとも1つの触覚センサ装置からなる周期的変位可能体を備える、体管内に配置可能なプローブを有し、該周期的変位可能体は、1Hz〜500kHzの範囲の励起周波数帯域幅と、1mm未満の最大ストローク長、および、0.01N〜1Nの範囲の変位力を有しており、また、該周期的変位可能体は、少なくとも前記励起周波数を制御する変位コントローラを有する変位装置を備えており、さらに、該周期的変位可能体は、変位モニタ装置および変位力モニタ装置に接続され、該周期的変位可能体の周期的な変位により前記組織に加えられる変位力による、周期的な圧縮に対する生体組織の粘弾性の反応をモニタする、多面的な生体組織の組織構造を検査するのに適した装置。
【請求項2】
前記プローブが、男女の泌尿器・生殖器路、胃腸器路、呼吸器路、動脈および静脈血管系のうちの少なくとも1つにおける体管内に挿入可能なように、形成および配置される、請求項1に記載の装置。
【請求項3】
前記プローブが、5mm以下の直径を有し、尿道内に挿入可能である、請求項1に記載の装置。
【請求項4】
前記プローブが、1cm〜3cmの長さを有する、請求項3に記載の装置。
【請求項5】
前記変位可能体を、加圧流体回路、機械的駆動システム、および、圧電アクチュエータのうちの少なくとも1つにより、作動させる、請求項1〜4のいずれかに記載の装置。
【請求項6】
前記プローブが、細長く、体管内に挿入可能な、配置装置の末端部に取り付けられている、請求項1〜5のいずれかに記載の装置。
【請求項7】
前記変位可能体が、近位に取り付けられたモータにより作動する、請求項6に記載の装置。
【請求項8】
前記変位可能体が、前記細長い配置装置により該変位可能体に駆動可能に接続され、遠位に取り付けられたモータにより作動する、請求項6に記載の装置。
【請求項9】
前記変位可能体が、加圧流体回路により作動する少なくとも1つの微小ピストンを備える、請求項1〜8のいずれかに記載の装置。
【請求項10】
前記変位可能体が、少なくとも1つのシューを備え、該シューと応力検知素子との間に挟まれた圧電装置上に前記シューが取り付けられ、これらが、応力をモニタするように構成および配置されており、前記装置の使用に際して、該変位可能体により、接触する組織へ加えられる力が決定されるようになっている、請求項1〜8のいずれかに記載の装置。
【請求項11】
前記装置の使用に際して、前記組織に力を加えるために使用される、前記変位可能体の力伝達面の領域と、前記変位可能体に伝えられる力の振幅とのうち、少なくとも1つが、ユーザにより調整可能に、形成および配置されている、請求項1〜10のいずれかに記載の装置。
【請求項12】
前記変位可能体が、その位置を制御可能なアクチュエータを内蔵しており、これにより、該アクチュエータ用の制御信号が、該変位可能体の変位をモニタするために使用可能となっている、請求項1〜11のいずれかに記載の装置。
【請求項13】
前記変位可能体の変位コントローラ、パワーソース、および、前記変位可能体それ自体のうち、少なくとも1つに、力検知器が組み込まれている、請求項1〜12のいずれかに記載の装置。
【請求項14】
複数の異なる励起周波数の中から選択された1つを適用するように形成および配置されている変位コントローラを備える、請求項1〜13のいずれかに記載の装置。
【請求項15】
前記励起周波数とストローク長のそれぞれを制御するように形成および配置されている変位コントローラを備える、請求項1〜14のいずれかに記載の装置。
【請求項16】
体管内で前記変位可能体の位置を変化させるための位置制御装置を含むことにより、前記装置の使用に際して、複数の異なる体管表面部位に、連続的に該装置が接触できるようにしている、請求項1〜15のいずれかに記載の装置。
【請求項17】
変位データおよび変位力データを処理するように形成および配置された処理ユニットを含むことにより、動的弾性率および振幅率のうち、少なくとも1つを生成するようになっている、請求項1〜16のいずれかに記載の装置。
【請求項18】
a)請求項1に記載の装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置で、該生体組織の体管表面と接触させる、
c)該体管表面全域の接触位置で、該生体組織を周期的に圧縮するように、1Hz〜50Hzの励起周波数帯域幅、1mm未満の最大ストローク、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各表面接触組織の位置での該組織の粘弾性応答をモニタする、および、
e)該体管表面全体の組織の粘弾性応答のプロファイルを生成する、
ことからなる、体管近傍の生体組織の組織学的プロファイルを生成するための方法。
【請求項19】
プロファイルされる生体組織のタイプに応じて適切な組織プロファイリングがなせるように、変位周波数、変位ストローク長、および、変位力の値を決定する予備工程を有する、請求項18に記載の方法。
【請求項20】
前記変位可能体が、前記体管の軸方向および/または周方向に分布している、前記複数の組織表面接触位置に対してかかわる、請求項18または19のいずれかに記載の方法。
【請求項21】
a)請求項1に記載の装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置のうちの連続した領域で、該生体組織の体管表面と接触させる、
c)該体管表面全域の接触位置で、該生体組織を周期的に圧縮するように、1Hz〜50Hzの励起周波数帯域幅、1mm未満の最大ストローク、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各表面接触組織の位置での該組織の粘弾性応答をモニタする、
e)該体管表面全体の組織の粘弾性応答のプロファイルを生成する、および、
f)該生成された粘弾性応答プロファイルを既知の組織学的特徴を有する組織の粘弾性応答プロファイルと比較する、
ことからなる、体管近傍の生体組織における組織異常により呈される症状の診断方法。
【請求項1】
少なくとも1つの触覚センサ装置からなる周期的変位可能体を備える、体管内に配置可能なプローブを有し、該周期的変位可能体は、1Hz〜500kHzの範囲の励起周波数帯域幅と、1mm未満の最大ストローク長、および、0.01N〜1Nの範囲の変位力を有しており、また、該周期的変位可能体は、少なくとも前記励起周波数を制御する変位コントローラを有する変位装置を備えており、さらに、該周期的変位可能体は、変位モニタ装置および変位力モニタ装置に接続され、該周期的変位可能体の周期的な変位により前記組織に加えられる変位力による、周期的な圧縮に対する生体組織の粘弾性の反応をモニタする、多面的な生体組織の組織構造を検査するのに適した装置。
【請求項2】
前記プローブが、男女の泌尿器・生殖器路、胃腸器路、呼吸器路、動脈および静脈血管系のうちの少なくとも1つにおける体管内に挿入可能なように、形成および配置される、請求項1に記載の装置。
【請求項3】
前記プローブが、5mm以下の直径を有し、尿道内に挿入可能である、請求項1に記載の装置。
【請求項4】
前記プローブが、1cm〜3cmの長さを有する、請求項3に記載の装置。
【請求項5】
前記変位可能体を、加圧流体回路、機械的駆動システム、および、圧電アクチュエータのうちの少なくとも1つにより、作動させる、請求項1〜4のいずれかに記載の装置。
【請求項6】
前記プローブが、細長く、体管内に挿入可能な、配置装置の末端部に取り付けられている、請求項1〜5のいずれかに記載の装置。
【請求項7】
前記変位可能体が、近位に取り付けられたモータにより作動する、請求項6に記載の装置。
【請求項8】
前記変位可能体が、前記細長い配置装置により該変位可能体に駆動可能に接続され、遠位に取り付けられたモータにより作動する、請求項6に記載の装置。
【請求項9】
前記変位可能体が、加圧流体回路により作動する少なくとも1つの微小ピストンを備える、請求項1〜8のいずれかに記載の装置。
【請求項10】
前記変位可能体が、少なくとも1つのシューを備え、該シューと応力検知素子との間に挟まれた圧電装置上に前記シューが取り付けられ、これらが、応力をモニタするように構成および配置されており、前記装置の使用に際して、該変位可能体により、接触する組織へ加えられる力が決定されるようになっている、請求項1〜8のいずれかに記載の装置。
【請求項11】
前記装置の使用に際して、前記組織に力を加えるために使用される、前記変位可能体の力伝達面の領域と、前記変位可能体に伝えられる力の振幅とのうち、少なくとも1つが、ユーザにより調整可能に、形成および配置されている、請求項1〜10のいずれかに記載の装置。
【請求項12】
前記変位可能体が、その位置を制御可能なアクチュエータを内蔵しており、これにより、該アクチュエータ用の制御信号が、該変位可能体の変位をモニタするために使用可能となっている、請求項1〜11のいずれかに記載の装置。
【請求項13】
前記変位可能体の変位コントローラ、パワーソース、および、前記変位可能体それ自体のうち、少なくとも1つに、力検知器が組み込まれている、請求項1〜12のいずれかに記載の装置。
【請求項14】
複数の異なる励起周波数の中から選択された1つを適用するように形成および配置されている変位コントローラを備える、請求項1〜13のいずれかに記載の装置。
【請求項15】
前記励起周波数とストローク長のそれぞれを制御するように形成および配置されている変位コントローラを備える、請求項1〜14のいずれかに記載の装置。
【請求項16】
体管内で前記変位可能体の位置を変化させるための位置制御装置を含むことにより、前記装置の使用に際して、複数の異なる体管表面部位に、連続的に該装置が接触できるようにしている、請求項1〜15のいずれかに記載の装置。
【請求項17】
変位データおよび変位力データを処理するように形成および配置された処理ユニットを含むことにより、動的弾性率および振幅率のうち、少なくとも1つを生成するようになっている、請求項1〜16のいずれかに記載の装置。
【請求項18】
a)請求項1に記載の装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置で、該生体組織の体管表面と接触させる、
c)該体管表面全域の接触位置で、該生体組織を周期的に圧縮するように、1Hz〜50Hzの励起周波数帯域幅、1mm未満の最大ストローク、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各表面接触組織の位置での該組織の粘弾性応答をモニタする、および、
e)該体管表面全体の組織の粘弾性応答のプロファイルを生成する、
ことからなる、体管近傍の生体組織の組織学的プロファイルを生成するための方法。
【請求項19】
プロファイルされる生体組織のタイプに応じて適切な組織プロファイリングがなせるように、変位周波数、変位ストローク長、および、変位力の値を決定する予備工程を有する、請求項18に記載の方法。
【請求項20】
前記変位可能体が、前記体管の軸方向および/または周方向に分布している、前記複数の組織表面接触位置に対してかかわる、請求項18または19のいずれかに記載の方法。
【請求項21】
a)請求項1に記載の装置を準備する、
b)該装置のプローブを体管内に挿入して、該プローブの周期的変位可能体を該体管表面全域の複数の位置のうちの連続した領域で、該生体組織の体管表面と接触させる、
c)該体管表面全域の接触位置で、該生体組織を周期的に圧縮するように、1Hz〜50Hzの励起周波数帯域幅、1mm未満の最大ストローク、および、0.01N〜1Nの範囲の変位力で、該変位可能体を周期的に変位させる、
d)該変位体による圧縮に対する各表面接触組織の位置での該組織の粘弾性応答をモニタする、
e)該体管表面全体の組織の粘弾性応答のプロファイルを生成する、および、
f)該生成された粘弾性応答プロファイルを既知の組織学的特徴を有する組織の粘弾性応答プロファイルと比較する、
ことからなる、体管近傍の生体組織における組織異常により呈される症状の診断方法。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2006−508727(P2006−508727A)
【公表日】平成18年3月16日(2006.3.16)
【国際特許分類】
【出願番号】特願2004−556506(P2004−556506)
【出願日】平成15年12月3日(2003.12.3)
【国際出願番号】PCT/GB2003/005217
【国際公開番号】WO2004/049929
【国際公開日】平成16年6月17日(2004.6.17)
【出願人】(505077002)ヘリオット−ワット ユニバーシティ (1)
【出願人】(501337513)ザ ユニバーシティ コート オブ ザ ユニバーシティ オブ エジンバラ (8)
【出願人】(505199094)
【Fターム(参考)】
【公表日】平成18年3月16日(2006.3.16)
【国際特許分類】
【出願日】平成15年12月3日(2003.12.3)
【国際出願番号】PCT/GB2003/005217
【国際公開番号】WO2004/049929
【国際公開日】平成16年6月17日(2004.6.17)
【出願人】(505077002)ヘリオット−ワット ユニバーシティ (1)
【出願人】(501337513)ザ ユニバーシティ コート オブ ザ ユニバーシティ オブ エジンバラ (8)
【出願人】(505199094)
【Fターム(参考)】
[ Back to top ]