
生体認証装置、生体認証方法及びプログラム
【課題】眼の虹彩パターンに関する情報同士の照合を短時間に行う。
【解決手段】虹彩の画像を分割することにより形成された8つの環状領域A1〜A8に応じた特性曲線S(1)〜S(8)を生成する。そして、これらの特性曲線の傾きの極性を配列することにより、照合対象コード1〜8をそれぞれ生成する。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードとなるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【解決手段】虹彩の画像を分割することにより形成された8つの環状領域A1〜A8に応じた特性曲線S(1)〜S(8)を生成する。そして、これらの特性曲線の傾きの極性を配列することにより、照合対象コード1〜8をそれぞれ生成する。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードとなるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体認証装置、生体認証方法及びプログラムに係り、更に詳しくは、眼の虹彩のパターンを用いて認証を行う生体認証装置、眼の虹彩のパターンを用いて認証を行うための生体認証方法及びプログラムに関する。
【背景技術】
【0002】
近年、文字や記号の組み合わせからなるコードやパスワードに代えて、対象者の身体的特徴を用いて認証を行う生体認証技術の研究開発が盛んに行われている。生体認証には、例えば、指紋、手の甲の静脈パターン、眼の虹彩パターン、声紋など、個人相互間で不同な身体的特徴が用いられるのが一般的である。特に、指紋や手の甲の静脈パターンを用いた認証装置は、認証精度が向上し、装置のコストダウンが進むにつれて、ATM(Automatic Teller Machine)やパーソナルコンピュータ(PC)など、種々の装置に搭載されるに至っている。
【0003】
しかしながら、指紋や手の甲の静脈パターンを用いた認証では、対象者が指や手などの身体の一部を装置に接触させるか、ある程度近づける必要がある。このため、最近では眼の虹彩パターンを用いた生体認証技術が注目されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3307936号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
虹彩のパターンを用いた認証システムでは、照合精度と照合速度との関係がトレードオフの関係にある。また、認証システムでは、その性質上照合精度は一定のレベル以上に維持されるべきである。このため、認証システムにおける処理速度の向上は実現が困難な課題の1つとなっている。
【0006】
本発明は、上述の事情の下になされたもので、眼の虹彩パターンに関する情報同士の照合を短時間に行うことができる装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る生体認証装置は、虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する変化量算出手段と、前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成するコード生成手段と、を備える。
【0008】
また、本発明に係る生体認証方法は、虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する工程と、前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する工程と、を含む。
【0009】
また、本発明に係るプログラムは、コンピュータを、虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する手段、前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する手段、として機能させる。
【発明の効果】
【0010】
眼の虹彩パターンに関する情報同士の照合を短時間に行うことができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態に係る生体認証装置1のブロック図である。
【図2】デジタル画像Pを示す図である。
【図3】デジタル画像Pを簡略化して示して示す画像P1を示す図である。
【図4】二値画像P2を示す図である。
【図5】サンプル画像SAMP1を示す図である。
【図6】図6(A)及び図6(B)は、基準ピクセル設定部31の動作を説明するための図(その1、その2)である。
【図7】基準ピクセル設定部31の動作を説明するための図(その3)である。
【図8】基準ピクセル設定部31の処理により得られる画像P3を示す図である。
【図9】基準ピクセル設定部31の処理結果を説明するための画像を示す図である。
【図10】瞳孔を構成する低輝度ピクセル群PG1と、高輝度ピクセル群PG2とを示す図である。
【図11】瞳孔中心位置特定部32の動作を説明するための図(その1)である。
【図12】瞳孔中心位置特定部32の動作を説明するための図(その2)である。
【図13】虹彩画像特定部33の動作を説明するための図(その1)である。
【図14】図14(A)は、虹彩画像特定部33の動作を説明するための図(その2)である。図14(B)は、特性曲線SLを示す図である。
【図15】環状領域規定部34の動作を説明するための図(その1)である。
【図16】環状領域規定部34の動作を説明するための図(その2)である。
【図17】環状領域規定部34の動作を説明するための図(その3)である。
【図18】微小領域規定部35の動作を説明するための図である。
【図19】図19(A)は、特性曲線S(1)を示す図である。また、図19(B)は、特性曲線S(1)の生成方法を説明するための図である。
【図20】図20(A)及び図20(B)は、照合対象コードの生成方法を説明するための図である。
【図21】本発明の第2の実施形態に係る生体認証装置2のブロック図である。
【図22】照合装置30の動作を示すフローチャート(その1)である。
【図23】照合装置30の動作を示すフローチャート(その2)である。
【図24】本発明の第3の実施形態に係る生体認証装置3のブロック図である。
【図25】平均輝度演算部35の動作を説明するための図である。
【図26】特性曲線g(1)の生成方法を説明するための図である。
【発明を実施するための形態】
【0012】
《第1の実施形態》
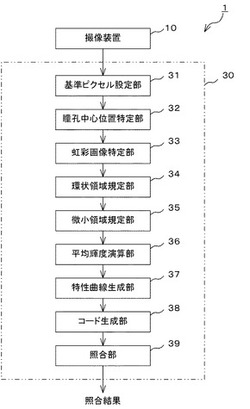
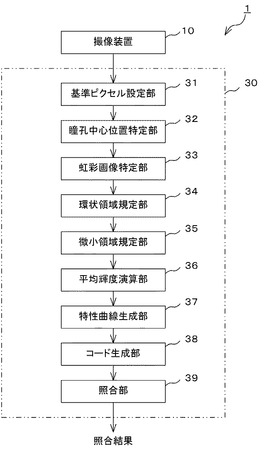
以下、本発明の第1の実施形態を、図1〜図20を参照しつつ説明する。図1は本実施形態に係る生体認証装置1の概略的な構成を示すブロック図である。生体認証装置1は、対象者の虹彩パターンを用いて認証を行う装置であり、撮像装置10、及び照合装置30を備えている。
【0013】
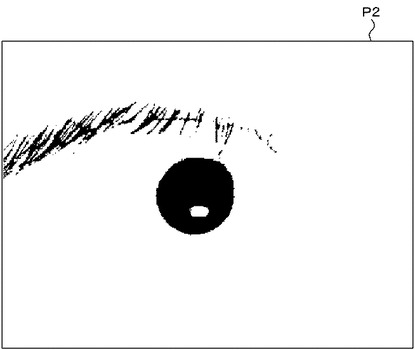
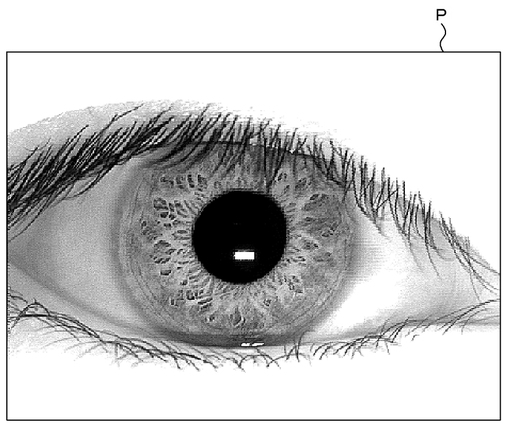
前記撮像装置10は、例えば近赤外線を含む照明光を照射する照明装置と、赤外線以外の可視光線をカットする赤外線フィルタを有する赤外線カメラを含んで構成されている。そして、対象者の眼を撮影することにより得られたデジタル画像を、照合装置30へ出力する。図2には、撮像装置10によって撮像されたデジタル画像Pが示されている。図2を見るとわかるように、撮像装置10では、少なくとも、対象者の虹彩と、その周囲に存在する瞼や睫などの一部が撮像される。また、撮像装置10では、赤外光を用いた撮像が行われるため、デジタル画像Pはグレースケール画像となる。
【0014】
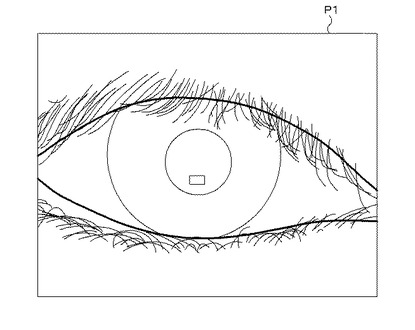
図3に示される画像P1は、デジタル画像Pについて、虹彩とその周辺に存在する部分の輪郭を、線のみで簡略化して示した画像である。以下の説明は、便宜上、デジタル画像Pと、このデジタル画像Pに対応した画像P1を用いて行うものとする。
【0015】
図1に戻り、前記照合装置30は、基準ピクセル設定部31、瞳孔中心位置特定部32、虹彩画像特定部33、環状領域規定部34、微小領域規定部35、平均輝度演算部36、特性曲線生成部37、コード生成部38、及び照合部39を有している。
【0016】
前記基準ピクセル設定部31は、まず、撮像装置10から出力されたデジタル画像Pを構成する複数のピクセルの中から、輝度が所定値以下の低輝度ピクセルを抽出する。低輝度ピクセルの抽出は、例えば、デジタル画像Pを二値画像に変換し、この時に現れる輝度が0となるピクセルを抽出することにより行うことができる。一例として図4には、デジタル画像Pを、所定の閾値を用いて画像変換することにより得られた二値画像P2が示されている。基準ピクセル設定部31は、図4に示される二値画像P2の黒色部分を構成する低輝度ピクセルを抽出する。なお、この時の閾値は、デジタル画像Pの撮像条件等によって決定することができる。そして、本実施形態では、二値画像P2に、虹彩の画像を構成するピクセルが高輝度ピクセルとして現れ、瞳孔の画像を構成するピクセルが低輝度ピクセルとして現れるように、閾値を決定する。このように、閾値を決定することで、二値画像P2には、主として瞳孔と、睫などの画像を形成していたピクセルが低輝度ピクセルとして現れる。
【0017】
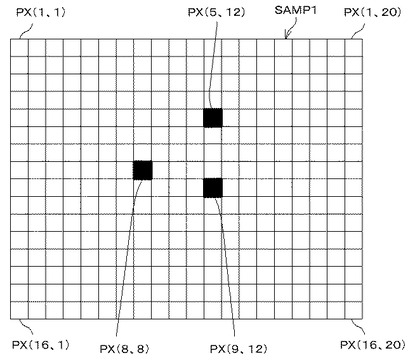
次に、基準ピクセル設定部31は、抽出された低輝度ピクセルを順次選択し、選択した低輝度ピクセルから所定の距離以内にある複数のピクセルそれぞれに、例えば値1を付与する。以下、サンプル画像SAMP1を示す図5を参照しつつ説明する。
【0018】
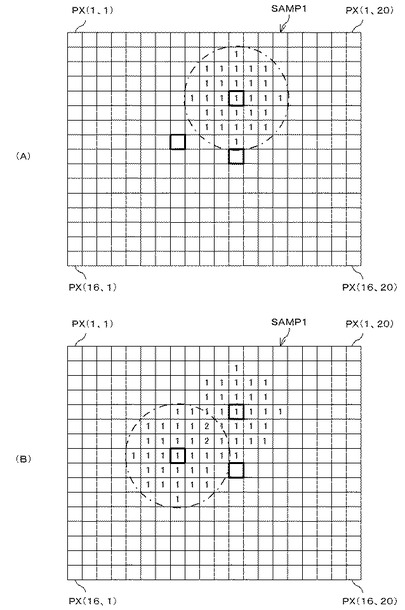
図5は、一例として16行20列のマトリクス状に配置されたピクセルPX(m、n)からなる画像SAMP1が示されている。なお、mは1から16までの行番を表す整数であり、nは1から20までの列番を表す整数である。この画像SAMP1は、3つの低輝度ピクセルPX(5、12)、PX(8、8)、PX(9、12)と、それ以外の高輝度ピクセルPXからなる二値画像である。基準ピクセル設定部31は、まず5行目の低輝度ピクセルPX(5、12)を選択する。そして、図6(A)を参照するとわかるように、低輝度ピクセルPX(5、12)と、この低輝度ピクセルPX(5、12)から所定の距離以内にあるピクセルPXそれぞれに1を付与する。
【0019】
次に、基準ピクセル設定部31は、8行目の低輝度ピクセルPX(8、8)を選択する。そして、図6(B)を参照するとわかるように、低輝度ピクセルPX(8、8)と、この低輝度ピクセルPX(8、8)から所定の距離以内にあるピクセルPXそれぞれに1を付与する。ここで、6行目のピクセルPX(6、10)と、7行目のピクセルPX(7、10)については、低輝度ピクセルPX(5、12)及びPX(8,8)それぞれに対して所定の距離以内にある。このため、当該処理が完了した時点では、付与された値の積算値が2となっている。
【0020】
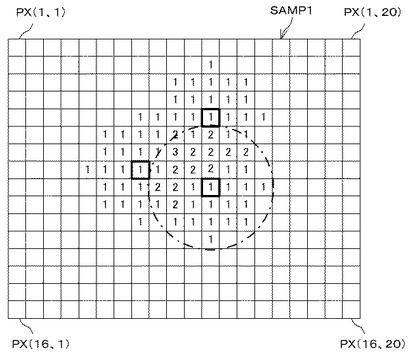
次に、基準ピクセル設定部31は、9行目の低輝度ピクセルPX(9、12)を選択する。そして、図7を参照するとわかるように、低輝度ピクセルPX(9、12)と、この低輝度ピクセルPX(9、12)から所定の距離以内にあるピクセルPXそれぞれに1を付与する。ここで、7行目のピクセルPX(7、10)については、低輝度ピクセルPX(5、12)、PX(8,8)、及びPX(9、12)それぞれに対して所定の距離以内にある。このため、当該処理が完了した時点では、付与された値の積算値が3となっている。基準ピクセル設定部31は、上述した処理を、画像に含まれる低輝度ピクセルすべてに対して実行する。
【0021】
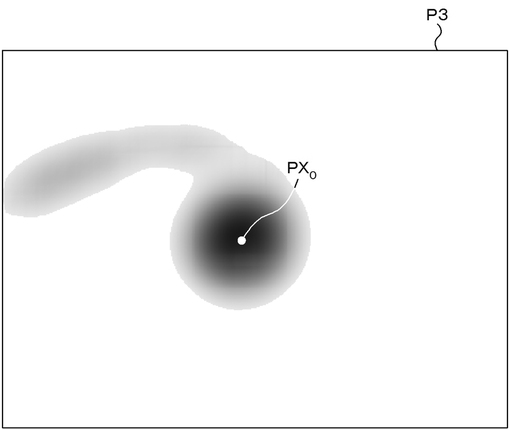
基準ピクセル設定部31は、二値画像P2を構成する各低輝度ピクセルに対して、上述の処理を施す。図8には、基準ピクセル設定部31が、二値画像P2の黒色部分を構成する低輝度ピクセルに対して上述の処理を行った後の結果を概念的に示す画像P3が示されている。画像P3では、付与された値の積算値が最も大きいピクセルほど高い濃度で着色された状態で表示されている。
【0022】
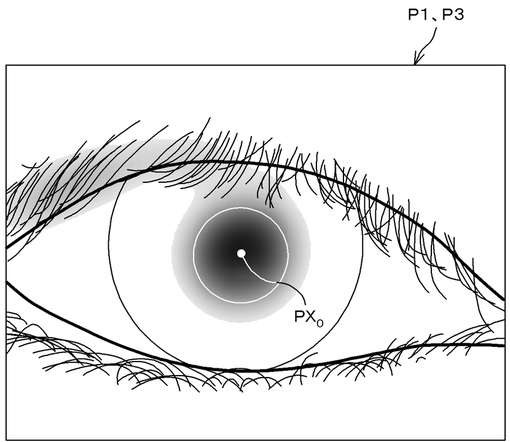
そして、基準ピクセル設定部31は、付与された値の積算値が最も大きいピクセルを、基準ピクセルPX0に設定し、この基準ピクセルPX0の位置情報を瞳孔中心位置特定部32に出力する。この基準ピクセルPX0は、図8に示されるように、画像P3において最も高い濃度で示されたピクセルの位置と一致する。また、図9は、画像P1と画像P3とを重ねて示した図である。図9に示されるように、基準ピクセルPX0の位置は、画像P1に示される眼の瞳孔の中心とほぼ一致する。
【0023】
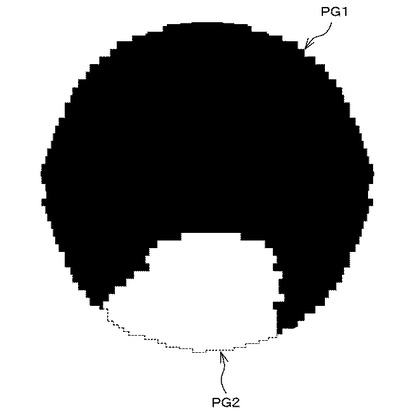
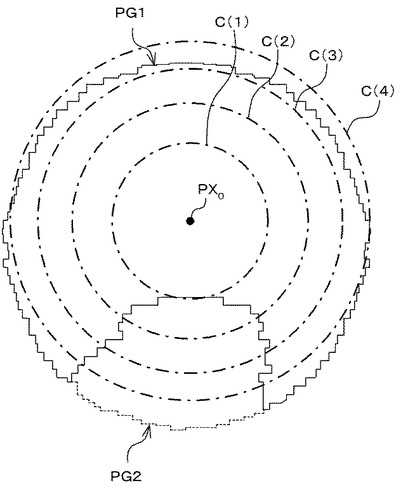
一例として、図10には二値画像P2に含まれる瞳孔を構成する低輝度ピクセル群PG1と、高輝度ピクセル群PG2とが示されている。通常、瞳孔を含む眼の画像を撮影すると、角膜の表面で反射した反射光の影響で、瞳孔を構成するピクセルのうちの一部のピクセルの輝度が高くなってしまう。このため、二値画像P2に現れる瞳孔を構成するピクセル群は、低輝度ピクセル群PG1と、高輝度ピクセル群PG2とに2分される。したがって、瞳孔の画像を形成するピクセルのうち、高輝度ピクセル群を構成するピクセルの数が増加するにつれて、基準ピクセルPX0の位置が瞳孔中心から大きくずれてしまうことが考えられる。そこで、瞳孔中心位置特定部32は、二値画像P2における瞳孔を構成する低輝度ピクセル群PG1の分布と、基準ピクセルPX0の位置情報とに基づいて、瞳孔の中心位置の検出を行う。
【0024】
図11に示されるように、瞳孔中心位置特定部32は、基準ピクセルPX0を中心とする円C(1)を設定する。この円C(1)の半径は、瞳孔の半径よりも十分に小さくなるように設定する。例えば、円C(1)の半径は、低輝度ピクセル群PG1のX軸方向又はY軸方向の分布範囲などを考慮して決定することができる。
【0025】
次に、瞳孔中心位置特定部32は、基準ピクセルPX0を中心とし、円C(1)の半径よりも大きい半径を有する円C(2)を設定する。
【0026】
次に、瞳孔中心位置特定部32は、円C(1),C(2)それぞれの面積S1,S2と、円C(1),C(2)それぞれの内側にある低輝度ピクセルの個数N1、N2を算出する。そして、円C(1)及び円C(2)の面積の差(S2−S1)に対する、それぞれの円内の低輝度ピクセルの個数(N2−N1)の比R1((N2−N1)/(S2−S1))を算出する。
【0027】
次に、瞳孔中心位置特定部32は、算出した比R1の値が、所定の値以上であるか否かを判定する。そして、この判定が肯定された場合には、瞳孔中心位置特定部32は、円C(2)の半径より大きい半径を有する円C(3)を設定する。そして、瞳孔中心位置特定部32は、円C(2),C(3)それぞれの面積S2,S3と、円C(2),C(3)それぞれの内側にある低輝度ピクセルの個数N2、N3を算出する。そして、円C(2)及び円C(3)の面積の差(S3−S2)に対する、それぞれの円内の低輝度ピクセルの個数(N3−N2)の比R2((N3−N2)/(S3−S2))を算出する。
【0028】
次に、瞳孔中心位置特定部32は、算出した比R2の値が、所定の値以上であるか否かを判定する。以下、瞳孔中心位置特定部32は、上述の処理を、所定の値以下の比RNが算出されるまで、繰り返し行う。これにより、二値画像P2の瞳孔の画像上に規定される円はその大きさが、徐々に拡大されていく。
【0029】
一方、所定の値以下の比RNが算出された場合には、瞳孔中心位置特定部32は、この時の円C(N)を用いて、瞳孔の中心位置を特定する。なお、所定の値以下の比RNが算出される場合とは、例えば、図11に示されるように、低輝度ピクセル群PG1及び高輝度ピクセル群PG2によって規定される領域からはみ出た状態の円C(4)が設定された場合である。
【0030】
円C(1)、C(2)、及びC(3)に関しては、その内部に含まれるピクセルは、瞳孔を形成するピクセルであり、低輝度ピクセル群PG1又は高輝度ピクセル群PG2のいずれかに属するピクセルである。この場合には、算出される比Rの値はほぼ一定となる。一方、円C(4)に含まれるピクセルは、瞳孔を形成する低輝度ピクセル群PG1及び高輝度ピクセル群PG2に属するピクセル以外のピクセルが含まれる。これらのピクセルは、虹彩の画像を形成する高輝度ピクセルである。このため、円C(4)の内部に含まれる低輝度ピクセルの数N4が減少し、結果的に、算出される比R3(=(N4−N3)/(S4−S3))の値は、所定の値より小さくなる。
【0031】
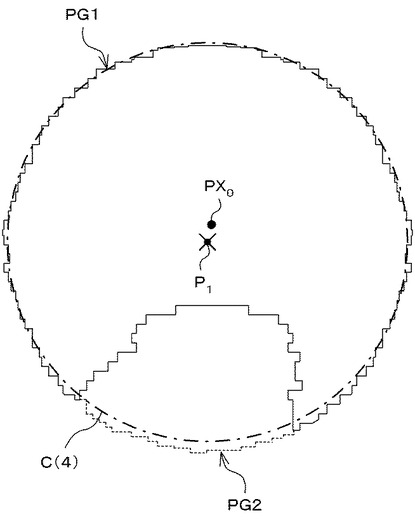
次に、瞳孔中心位置特定部32は、図12を参照するとわかるように、円C(4)を基準ピクセルPX0を基準位置として移動させながら、円C(4)に含まれる低輝度ピクセルの数が最大となったときの円C(4)の中心位置P1を探索する。そして、探索した位置P1を瞳孔中心の位置と特定する。
【0032】
なお、円C(1)〜C(N)の半径は、例えば、ピクセルの大きさを基準に例えば1ピクセルから数ピクセル分だけ異なるように設定することが考えられる。また、瞳孔中心の検出精度は、円C(N−1)の半径と、円C(N)の半径との差が小さくなるほど向上する。
【0033】
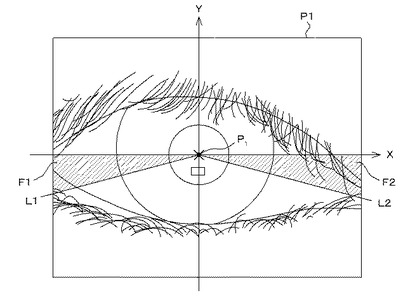
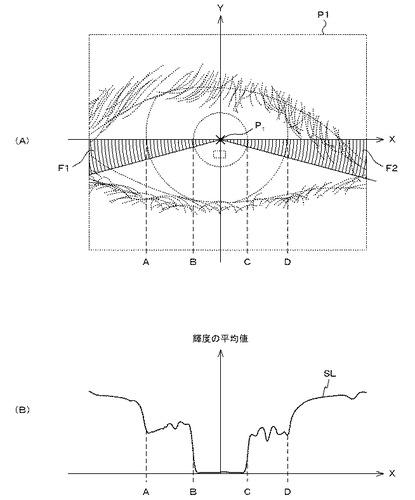
前記虹彩画像特定部33は、図13に示されるように、画像P1上に位置P1が原点となるXY座標系を定義する。そして、画像P1上に位置P1を起点とし、X軸と15度の角度をなす直線L1、L2とによって規定される三角形の領域F1と領域F2とを規定する。次に、図14(A)に示されるように、虹彩画像特定部33は、領域F1を、X軸と直線L1とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。また、領域F2を、X軸と直線L2とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。
【0034】
図14(B)には、位置xと、円弧状の微小領域に含まれるピクセルの輝度の平均値との関係を示す特性曲線SLが示されている。前記虹彩画像特定部33は、領域F1又は領域F2に属する微小領域ごとに、微小領域に含まれるピクセルの輝度の平均値を算出する。そして、微小領域のX軸上の位置と対応する輝度の平均値との関係を表す特性曲線SLを算出する。次に、この特性曲線SLの変化度合いに基づいて、X軸と虹彩の外縁との交点のX座標A、Dを求める。
【0035】
交点のX座標A、Dは、例えば、特性曲線SLをX軸上の位置xで微分して得られた微分値と、所定の閾値とを比較することで特定することができる。図14(B)の特性曲線SLを参照するとわかるように、一般に、虹彩の領域と白目の境界では輝度の平均値の変化度合に連続性が見られる。また、虹彩の領域から白目の領域に変わる領域では、輝度の平均値の変化度合いは他の部分よりも大きくなる。この性質を利用することにより、特性曲線SLの微分値を用いて、X軸と虹彩の外縁との交点のX座標A、Dをほぼ正確に求めることができる。
【0036】
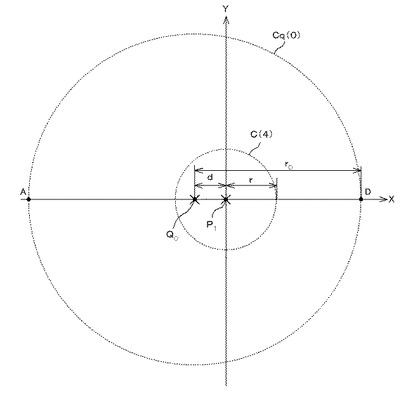
そして、虹彩画像特定部33は、図15を参照するとわかるように、画像P1上の位置P1を中心とする円C(4)と、例えば中心がX軸上に位置し、XY座標系における点(A、0)と、点(D、0)とを通る円Cq(0)、すなわち、点((A+D)/2、0)を中心Q0とし、半径(D−A)/2の円Cq(0)とで規定される領域に虹彩の画像が位置していると特定する。そして、特定した結果を環状領域規定部34へ通知する。
【0037】
図15に示されるように、瞳孔の外縁にほぼ一致する円C(4)の中心P1と、虹彩の外縁にほぼ一致する円Cq(0)の中心Q0は、一般的に一致しない。その理由は、人の左右の眼の視線は通常平行ではないため、対象者の正面から眼を撮影した場合には、撮像装置10の光軸と視線とが平行とはならない。このため、球面状の虹彩は、撮像装置10に対して斜めから撮影される。したがって、デジタル画像上では、虹彩の中心と瞳孔の中心とがオフセットしてしまうのである。
【0038】
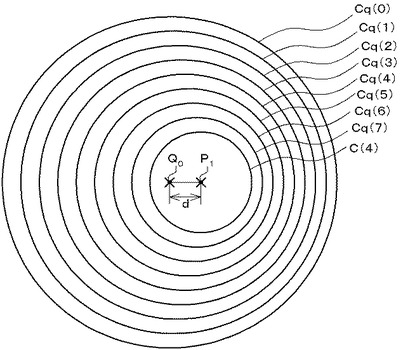
前記環状領域規定部34は、上述の事情を考慮して、図16に示されるように、瞳孔の外縁にほぼ一致する円C(4)と、虹彩の外縁にほぼ一致する円Cq(0)とによって規定される領域を、7つの円Cq(1)〜円Cq(7)を用いて、8つの環状領域に区分する。以下、具体的に説明する。
【0039】
まず、環状領域規定部34は、円C(4)の中心P1と、円Cq(0)の中心Q0との距離dを計測する。そして、中心Q0のX座標に距離dを8で除した値をそれぞれ加算していくことで、円Cq(1)〜円Cq(7)の中心Q1〜中心Q7を算出する。なお、中心Q1〜中心Q7の座標はそれぞれ、Q1((A+D)/2+d/8、0)、Q2((A+D)/2+d/4、0)、Q3((A+D)/2+3d/8、0)、Q4((A+D)/2+d/2、0)、Q5((A+D)/2+5d/8、0)、Q6((A+D)/2+3d/4、0)、Q7((A+D)/2+7d/8、0)と計算される。
【0040】
次に、環状領域規定部34は、円Cq(0)の半径r0から、円C(4)の半径rと円Cq(0)の半径r0との差を8で除した値をそれぞれ減算していくことで、円Cq(1)〜円Cq(7)の半径r1〜半径r7を算出する。なお、半径r1〜半径r7は、それぞれr1:(r0−(r0−r)/8)、r2:(r0−2・(r0−r)/8)、r3:(r0−3・(r0−r)/8)、r4:(r0−4・(r0−r)/8)、r5:(r0−5・(r0−r)/8)、r6:(r0−6・(r0−r)/8)、r7:(r0−7・(r0−r)/8)と計算される。
【0041】
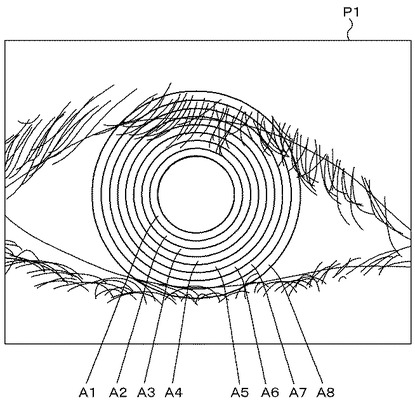
次に、環状領域規定部34は、上述のように算出した中心Q1〜中心Q7と、半径r1〜半径r7に関する算出結果に基づいて、図16に示されるように、円Cq(0)と円C(4)とで規定される領域に、7つの円Cq(1)〜円Cq(7)を規定する。これにより、図17を参照するとわかるように、画像P1に含まれる虹彩の画像が7つの円Cq(1)〜円Cq(7)によって、8つの環状領域A1〜A8に区分される。そして、環状領域規定部34は、8つの環状領域A1〜A8に関する情報を、微小領域規定部35へ出力する。
【0042】
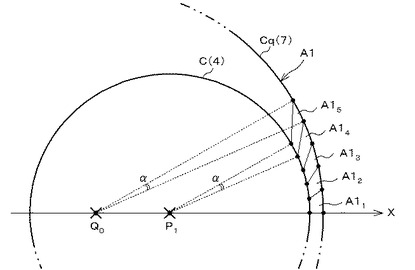
前記微小領域規定部35は、8つの環状領域A1〜A8それぞれを、例えば256の微小領域に区分する。具体的には、円C(4)、円Cq(1)〜円Cq(7)を、中心角が等しい256の円弧に分割するとともに、隣接する円同士の対応関係にある1組の円弧と、端点を結ぶ線分を規定していく。以下、図18を参照しつつ説明する。
【0043】
図18は、円C(4)と円Cq(7)とによって規定された環状領域A1を、256の微小領域に区分する様子を示す図である。図18を参照するとわかるように、微小領域規定部35は、円C(4)と円Cq(7)を、それぞれの円とX軸との交点を基点として、中心角がα(360/256)の円弧にそれぞれ区分するとともに、対応関係にある円弧の端点を結ぶ線分を規定することで、環状領域A1を、256個の微小領域A11〜A1256に区分する。同様に、微小領域規定部35は、環状領域A2〜A8それぞれを、微小領域A21〜A2256、微小領域A31〜A3256、微小領域A41〜A4256、微小領域A51〜A5256、微小領域A61〜A6256、微小領域A71〜A7256、微小領域A81〜A8256に区分する。そして、微小領域規定部35は、上記微小領域に関する情報を平均輝度演算部36へ出力する。
【0044】
前記平均輝度演算部36は、まず、環状領域A1に属する微小領域A11〜A1256ごとに、微小領域A1i(i=1、2、…、256)に含まれるピクセルの輝度の平均値AVG1iを求める。以下順次、微小領域規定部35は、環状領域A2に属する微小領域A2iにそれぞれに含まれるピクセルの輝度の平均値AVG2iを求める。次に、環状領域A3に属する微小領域A3iにそれぞれに含まれるピクセルの輝度の平均値AVG3iを求める。次に、環状領域A4に属する微小領域A4iにそれぞれに含まれるピクセルの輝度の平均値AVG4iを求める。次に、環状領域A5に属する微小領域A5iにそれぞれに含まれるピクセルの輝度の平均値AVG5iを求める。次に、環状領域A6に属する微小領域A6iにそれぞれに含まれるピクセルの輝度の平均値AVG6iを求める。次に、環状領域A7に属する微小領域A7iにそれぞれに含まれるピクセルの輝度の平均値AVG7iを求める。次に、環状領域A8に属する微小領域A8iにそれぞれに含まれるピクセルの輝度の平均値AVG8iを求める。そして、平均輝度演算部36は、上記平均値に関する情報を特性曲線生成部37へ出力する。
【0045】
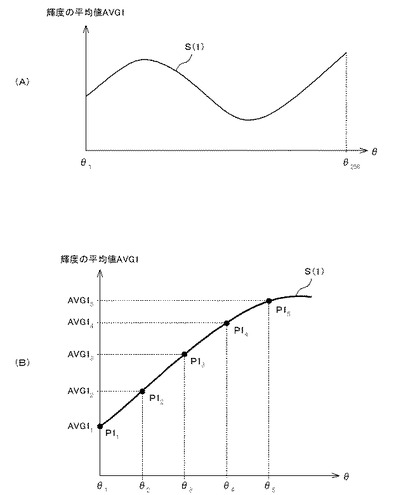
図19(A)には、微小領域A1iの極座標と、微小領域A1iごとに算出された輝度の平均値との関係を示す特性曲線S(1)が示されている。前記特性曲線生成部37は、まず、横軸を極座標とし縦軸を輝度とする座標上に、微小領域A1iの極座標θiと、微小領域A1iごとに算出された輝度の平均値AVG11とで定まる点をプロットしていく。そして、これらの点を通る曲線を特性曲線S(1)として生成する。以下、具体的に説明する。
【0046】
図18を参照するとわかるように、例えば、微小領域A1iの極座標θiの値は(i−1)・αで示すことができる。したがって、微小領域A1iの極座標θiの値は、微小領域A11の極座標θ1の値が0、微小領域A12の極座標θ2の値がα、微小領域A13の極座標θ3の値が2α、微小領域A14の極座標θ4の値が3αというように決定される。
【0047】
特性曲線生成部37は、図19(B)を参照するとわかるように、順次、微小領域A11の極座標θ1と輝度の平均値AVG11で定まる点P11、微小領域A12の極座標θ2と輝度の平均値AVG12で定まる点P12、微小領域A13の極座標θ3と輝度の平均値AVG13で定まる点P13というように、まず微小領域A1iの極座標θiと輝度の平均値AVG1iとで定まる256個の点P1iを、上述の座標上にプロットしていく。次に、256個の点P1iを通る曲線を生成し、この曲線を特性曲線S(1)とする。
【0048】
以下順次、特性曲線生成部37は、微小領域A2iの極座標と、微小領域A2iごとに算出された輝度の平均値との関係を示す特性曲線S(2)を算出する。次に、微小領域A3iの極座標と、微小領域A3iごとに算出された輝度の平均値との関係を示す特性曲線S(3)を算出する。次に、微小領域A4iの極座標と、微小領域A4iごとに算出された輝度の平均値との関係を示す特性曲線S(4)を算出する。次に、微小領域A5iの極座標と、微小領域A5iごとに算出された輝度の平均値との関係を示す特性曲線S(5)を算出する。次に、微小領域A6iの極座標と、微小領域A6iごとに算出された輝度の平均値との関係を示す特性曲線S(6)を算出する。次に、微小領域A7iの極座標と、微小領域A7iごとに算出された輝度の平均値との関係を示す特性曲線S(7)を算出する。次に、微小領域A8iの極座標と、微小領域A8iごとに算出された輝度の平均値との関係を示す特性曲線S(8)を算出する。そして、特性曲線S(1)〜S(8)に関する情報を、コード生成部38へ出力する。
【0049】
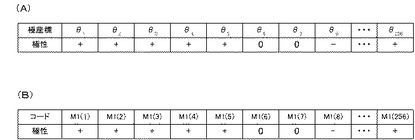
コード生成部38は、環状領域A1の輝度の変化を示す特性曲線S(1)のθiにおける傾きをM1(i)をそれぞれ算出する。そして、この傾きの極性を極座標θiに準じて配列することでコード1[M1(1)、M1(2)、…M1(256)]を生成する。例えば、図20(A)の表に示されるように、特性曲線S(1)のθiにおける傾きの極性が、+、−、及び零の三値うちのいずれかとなる場合には、図20(B)の表に示されるように、コード1[M1(1)、M1(2)、…M1(256)]は、+、−、及び零が配列されてなるコードとなる。
【0050】
以下同様に、コード生成部38は、コード2[M2(1)、M2(2)、…M2(256)]、コード3[M3(1)、M3(2)、…M3(256)]、コード4[M4(1)、M4(2)、…M4(256)]、コード5[M5(1)、M5(2)、…M5(256)]、コード2[M6(1)、M6(2)、…M6(256)]、コード2[M7(1)、M7(2)、…M7(256)]、コード2[M8(1)、M8(2)、…M8(256)]を生成する。そして、コード生成部38は、上述の8つのコード1〜8を1つの照合対象コード群として照合部39へ出力する。
【0051】
照合部39には、予め上述した処理と同様の処理によって特定された虹彩の画像に基づき、かつ特定の個人情報と関連づけられた8つのコードからなる複数のコード群に関するデータが蓄積されている。照合部39は、上述の照合対象コード群と、予め蓄積されたコード群(以下、照合コード群という)それぞれとの照合を行う。そして、照合対象コード群に対する類似度合いが所定の値以上の照合コード群が特定された場合には、その結果と、照合コード群に関連づけられた個人情報を外部へ出力する。一方、対象コード群に対する類似度合いが所定の値以上の照合コード群が特定されなかった場合には、その結果を外部へ出力する。
【0052】
以上説明したように、本第1の実施形態では、虹彩の画像が分割されることにより形成された8つの環状領域A1〜A8に応じた特性曲線S(1)〜S(8)が生成され、これらの特性曲線の傾きの極性が配列されることにより照合対象コード1〜8がそれぞれ生成される。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードであるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【0053】
具体的には、撮像装置10からの画像に基づいて生成された特性曲線S(1)〜S(8)の波形と、予め取得された特性曲線の波形とを直接照合する場合に比べて、照合するデータ量が少なくてすむ。したがって、照合対象コードの照合を短時間に行うことができる。
【0054】
また、本第1の実施形態では、環状領域A1〜A8を区分することにより256の微小領域を設定したが、これに限らず、隣接する円同士の対応関係にある1組の円弧の端点を結んで形成される四角形の領域を、それぞれの環状領域A1〜A8に沿って設定してもよい。
【0055】
また、本第1の実施形態では、環状領域A1〜A8それぞれに256の微小領域を規定した場合について説明したが、これに限らず、例えば、256以下の微小領域を規定してもよく、256以上の微少領域を規定してもよい。
【0056】
《第2の実施形態》
次に、本発明の第2の実施形態を、図21〜図23を参照しつつ説明する。なお、第1の実施形態と同一又は同等の構成については、同等の符号を用いるとともに、その説明を省略又は簡略する。
【0057】
本実施形態に係る生体認証装置2は、照合装置30が、一般的なコンピュータ、又はワークステーションなどの装置と同様の構成によって実現されている点で、第1の実施形態に係る生体認証装置1と相違している。
【0058】
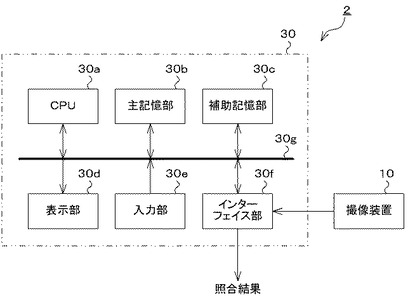
図21は、生体認証装置2の物理的な構成を示すブロック図である。図21に示されるように、生体認証装置2は、撮像装置10、及びコンピュータからなる照合装置30を備えている。
【0059】
前記照合装置30は、CPU(Central Processing Unit)30a、主記憶部30b、補助記憶部30c、表示部30d、入力部30e、インターフェイス部30f、及び上記各部を相互に接続するシステムバス30gを含んで構成されている。
【0060】
CPU30aは、補助記憶部30cに記憶されているプログラムに従って、撮像装置10によって撮像された画像Pに対して、後述する画像処理を実行する。
【0061】
主記憶部30bは、RAM(Random Access Memory)等を含んで構成され、CPU30aの作業領域として用いられる。
【0062】
補助記憶部30cは、ROM(Read Only Memory)、磁気ディスク、半導体メモリ等の不揮発性メモリを含んで構成されている。この補助記憶部30cは、CPU30aが実行するプログラム、及び各種パラメータなどを記憶している。また、CPU30aによる処理結果などを含む情報を記憶する。
【0063】
表示部30dは、CRT(Cathode Ray Tube)またはLCD(Liquid Crystal Display)などを含んで構成され、CPU30aの処理結果を表示する。本実施形態では、デジタル画像Pに対する処理が実行されるごとに、その処理結果としての二値画像P2、画像P3などが表示される。
【0064】
入力部30eは、キーボードやマウス等のポインティングデバイスを含んで構成されている。オペレータの指示は、この入力部30eを介して入力され、システムバス30gを経由してCPU30aに通知される。
【0065】
インターフェイス部30fは、シリアルインターフェイスまたはLAN(Local Area Network)インターフェイス等を含んで構成されている。撮像装置10は、インターフェイス部30fを介してシステムバス30gに接続される。
【0066】
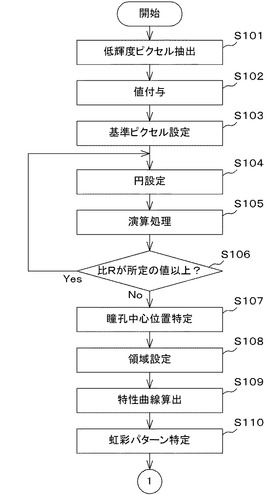
図22及び図23のフローチャートは、照合装置30のCPU30aによって実行されるプログラムの一連の処理アルゴリズムに対応している。以下、図22及び図23を参照しつつ、照合装置30における画像処理について説明する。なお、この画像処理は、CPU30aが、補助記憶部30cから読み出したプログラムに従って、主記憶部30b、補助記憶部30c、表示部30d、インターフェイス部30fを統括的に制御することにより実現される。
【0067】
まず、最初のステップS101では、CPU30aは、撮像装置10によって撮像されたデジタル画像Pを構成する複数のピクセルの中から、輝度が所定値以下の低輝度ピクセルを抽出する。具体的には、デジタル画像Pを、所定の閾値を用いて画像変換することにより得られた二値画像P2の中から低輝度ピクセルを抽出する。
【0068】
次のステップS102では、CPU30aは、抽出された低輝度ピクセルを順次選択し、選択した低輝度ピクセルから所定の距離以内にある複数のピクセルそれぞれに、例えば値1を付与する。
【0069】
次のステップS103では、CPU30aは、付与された値の積算値が最も大きいピクセルを、基準ピクセルPX0に設定する。図9に示されるように、基準ピクセルPX0の位置は、画像P1に示される目の瞳孔の中心とほぼ一致する。
【0070】
次のステップS104では、CPU30aは、基準ピクセルPX0を中心とする円C(1)と、円C(1)の半径よりも大きい半径を有する円C(2)を設定する。
【0071】
次のステップS105では、CPU30aは、円C(1),C(2)それぞれの面積S1,S2と、円C(1),C(2)それぞれの内側にある低輝度ピクセルの個数N1、N2を演算する。そして、円C(1)及び円C(2)の面積の差(S2−S1)に対する、それぞれの円内の低輝度ピクセルの個数(N2−N1)の比R1((N2−N1)/(S2−S1))を算出する。
【0072】
次のステップS106では、CPU30aは、比R1の値が、所定の値以上であるか否かを判定する。そして、ステップS106での判定が肯定された場合には、ステップS104に戻る。
【0073】
この場合、CPU30aは、新たに円C(2)の半径より大きい半径を有する円C(3)を設定する(ステップS104)。そして、円C(2),C(3)それぞれの面積S2,S3と、円C(2),C(3)それぞれの内側にある低輝度ピクセルの個数N2、N3を演算する。そして、円C(2)及び円C(3)の面積の差(S3−S2)に対する、それぞれの円内の低輝度ピクセルの個数(N3−N2)の比R2((N3−N2)/(S3−S2))を算出する(ステップS105)。以下、ステップS106での判定が否定されるまで、ステップS104〜ステップS106までの処理が繰り返される。
【0074】
一方、ステップ106での判定が否定された場合には、次のステップS107に移行する。なお、ステップS106での判定が否定される場合とは、比Rの値が、所定の値より小さい場合である。例えば、図11に示されるように、ピクセル群PG1、PG2によって規定される領域からはみ出た状態の円C(4)が設定された場合は、ステップS106での判定が否定される。
【0075】
次のステップS107では、CPU30aは、円C(4)を基準ピクセルPX0を基準位置として移動させながら、円C(4)に含まれる低輝度ピクセルの数が最大となったときの円C(4)の中心位置P1を探索する。そして、探索した位置P1を瞳孔中心の位置と特定する。
【0076】
次のステップS108では、CPU30aは、画像P1上に位置P1が原点となるXY座標系を定義する。そして、画像P1上に位置P1を起点とし、X軸と15度の角度をなす直線L1、L2とによって規定される三角形の領域F1と領域F2とを規定する。次に、図14(A)に示されるように、CPU30aは、領域F1を、X軸と直線L1とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。また、領域F2を、X軸と直線L2とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。
【0077】
次のステップS109では、CPU30aは、領域F1又は領域F2に属する微小領域ごとに、微小領域に含まれるピクセルの輝度の平均値を算出する。そして、微小領域のX軸上の位置と対応する輝度の平均値との関係を表す特性曲線SLを算出する。
【0078】
次のステップS110では、CPU30aは、この特性曲線SLの変化度合いに基づいて、X軸と虹彩の外縁との交点のX座標A及びDを求める。そして、図15を参照するとわかるように、画像P1上の円C(4)と、円Cq(0)とで規定される領域に虹彩の画像が位置していると特定する。
【0079】
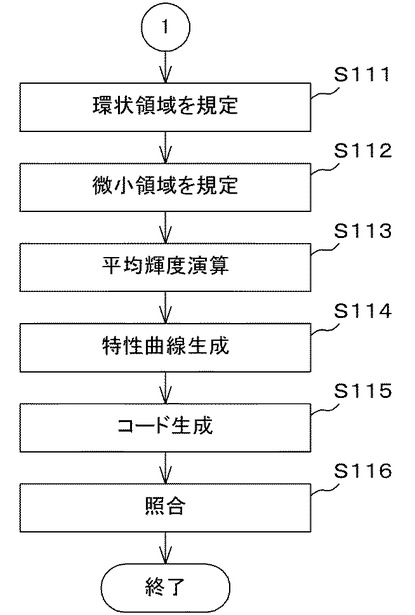
次のステップS111では、CPU30aは、図16に示されるように、瞳孔の外縁にほぼ一致する円C(4)と、虹彩の外縁にほぼ一致する円Cq(0)とによって規定される領域を、7つの円Cq(1)〜円Cq(7)を用いて、8つの環状領域に区分する。
【0080】
次のステップS112では、CPU30aは、8つの環状領域A1〜A8それぞれを、例えば256の微小領域に区分する。具体的には、円C(4)と円Cq(7)を、それぞれの円とX軸との交点を基点として、中心角がα(360/256)の円弧にそれぞれ区分するとともに、対応関係にある円弧の端点を結ぶ線分を規定することで、環状領域A1を、256個の微小領域A11〜A1256に区分する。同様に、微小領域規定部35は、環状領域A2〜A8それぞれを、微小領域A21〜A2256、微小領域A31〜A3256、微小領域A41〜A4256、微小領域A51〜A5256、微小領域A61〜A6256、微小領域A71〜A7256、微小領域A81〜A8256に区分する。
【0081】
次のステップS113では、CPU30aは、まず、環状領域A1に属する微小領域A11〜A1256ごとに、微小領域A1i(i=1、2、…、256)に含まれるピクセルの輝度の平均値AVG1iを求める。以下順次、微小領域規定部35は、環状領域A2〜A8に属する微小領域A2i〜A8iそれぞれに含まれるピクセルの輝度の平均値AVG2i〜AVG8iを求める。
【0082】
次のステップS114では、CPU30aは、微小領域A1i〜A8iの極座標と、微小領域A1i〜A8iごとに算出された輝度の平均値との関係を示す特性曲線S(1)〜S(8)を算出する。
【0083】
次のステップS115では、CPU30aは、環状領域A1の輝度の変化を示す特性曲線S(1)のθiにおける傾きをM1(i)をそれぞれ算出する。そして、この傾きの極性を極座標θiに準じて配列することでコード1[M1(1)、M1(2)、…M1(256)]を生成する。同様に、コード生成部38は、コード2[M2(1)、M2(2)、…M2(256)]、コード3[M3(1)、M3(2)、…M3(256)]、コード4[M4(1)、M4(2)、…M4(256)]、コード5[M5(1)、M5(2)、…M5(256)]、コード2[M6(1)、M6(2)、…M6(256)]、コード2[M7(1)、M7(2)、…M7(256)]、コード2[M8(1)、M8(2)、…M8(256)]を生成する。
【0084】
次のステップS116では、CPU30aは、上述の照合対象コード群と、予め蓄積されたコード群(以下、照合コード群という)それぞれとの照合を行う。そして、照合対象コード群に対する類似度合いが所定の値以上の照合コード群が特定された場合には、その結果と、照合コード群に関連づけられた個人情報を外部へ出力する。一方、対象コード群に対する類似度合いが所定の値以上の照合コード群が特定されなかった場合には、その結果を外部へ出力する。
【0085】
以上説明したように、本第2の実施形態では、虹彩の画像が分割されることにより形成された8つの環状領域A1〜A8に応じた特性曲線S(1)〜S(8)が生成され、これらの特性曲線の傾きの極性が配列されることにより照合対象コード1〜8がそれぞれ生成される。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードであるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【0086】
具体的には、撮像装置10からの画像に基づいて生成された特性曲線S(1)〜S(8)の波形と、予め取得された特性曲線の波形とを直接照合する場合に比べて、照合するデータ量が少なくてすむ。したがって、照合対象コードの照合を短時間に行うことができる。
【0087】
《第3の実施形態》
次に、本発明の第3の実施形態を、図24を参照しつつ説明する。なお、第1の実施形態、及び第2の実施形態と同一又は同等の構成については、同等の符号を用いるとともに、その説明を省略又は簡略する。
【0088】
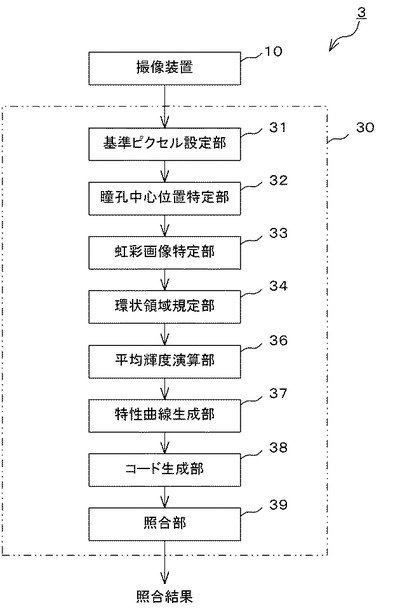
図24は、本実施形態に係る生体認証装置3のブロック図である。図24に示されるように、生体認証装置3は、環状領域A1〜A8を区分して微少領域を規定する微小領域規定部35を有していない点と、照合装置30を構成する平均輝度演算部36が、異なる動作をする点で、第1の実施形態に係る生体認証装置1と相違している。
【0089】
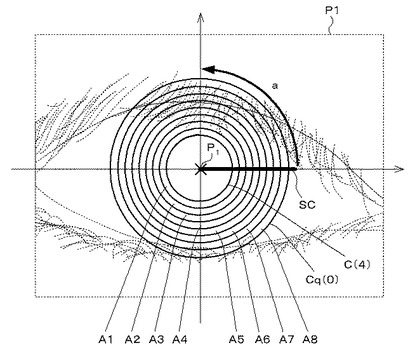
以下、本実施形態に係る平均輝度演算部36の動作について説明する。一例として、図25には、環状領域A1〜A8が規定された画像P1と、円C(4)の中心点P1を中心に回転する線分SCが示されている。平均輝度演算部36は、図25に示されるように、一端が中心点P1上にあり、他端が円Cq(0)の外側にある線分SCを規定する。
【0090】
次に、この線分SCを中心点P1の回りに、矢印aに示される方向に回転させると同時に、環状領域A1〜A8ごとに、環状領域A1〜A8それぞれに含まれるピクセルのうち、線分SCと重なったピクセルの平均輝度を算出する。そして、線分の回転角度θrotと対応づけて、算出した平均輝度AVG1θrot〜AVG8θrotを特性曲線生成部37へ出力する。
【0091】
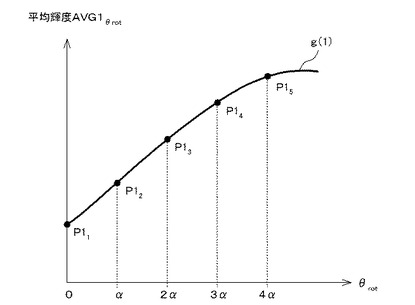
特性曲線生成部37は、横軸を角度とし、縦軸を平均輝度とする座標に、環状領域A1〜A8ごとに、線分の回転角度θrotと、平均輝度AVG1θrot〜AVG8θrotとによって定まる点をプロットしていくことで、環状領域A1〜A8にそれぞれ対応した8つの特性曲線g(1)〜g(8)を生成する。
【0092】
特性曲線g(1)〜g(8)が生成されると、コード生成部38は、まず、特性曲線g(1)について、図26を参照するとわかるように、零度を起点として角度α(360/256)ごとに、特性曲線g(1)の傾きM1(j・α)を算出する。なお、jは0から255までの整数である。本実施形態では、図26に示されるように、特性曲線g(1)上の点P1jにおける傾きM1(j・α)が順次算出される。
【0093】
そして、コード生成部38は、この傾きM1(j・α)の極性をθrotに準じて配列することで、+、−、及び零の三値の組み合わせからなるコード1[M1(0)、M1(α)、M1(2・α)…M1(255・α)]を生成する。同様に、特性曲線g(2)〜g(8)に対応したコード2[M2(0)、M2(α)、M2(2・α)…M2(255・α)]、コード3[M3(0)、M3(α)、M3(2・α)…M3(255・α)]、コード4[M4(0)、M4(α)、M4(2・α)…M4(255・α)]、コード5[M5(0)、M5(α)、M5(2・α)…M5(255・α)]、コード6[M6(0)、M6(α)、M6(2・α)…M6(255・α)]、コード7[M7(0)、M7(α)、M7(2・α)…M7(255・α)]、コード8[M8(0)、M8(α)、M8(2・α)…M8(255・α)]を生成する。そして、コード生成部38は、上述の8つのコード1〜8を1つの照合対象コード群として照合部39へ出力する。
【0094】
照合部39は、上述の照合対象コード群と、予め蓄積されたコード群(以下、照合コード群という)それぞれとの照合を行う。そして、照合対象コード群に対する類似度合いが所定の値以上の照合コード群が特定された場合には、その結果と、照合コード群に関連づけられた個人情報を外部へ出力する。一方、対象コード群に対する類似度合いが所定の値以上の照合コード群が特定されなかった場合には、その結果を外部へ出力する。
【0095】
以上説明したように、本第3の実施形態では、8つの環状領域A1〜A8それぞれが、線分SCを用いてスキャンされることにより、特性曲線g(1)〜g(8)が生成される。そして、これらの特性曲線g(1)〜g(8)の傾きの極性が、線分SCの回転角に準じて配列されることにより照合対象コード1〜8がそれぞれ生成される。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードであるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【0096】
なお、本第3の実施形態では、線分SCの回転角度θrotと、平均輝度AVG1θrot〜AVG8θrotとによって定まる点をプロットしていくことで得た曲線を、環状領域A1〜A8にそれぞれ対応した8つの特性曲線g(1)〜g(8)として生成した。しかしながら、本発明はこれに限定されるものではなく、特性曲線g(1)〜g(8)は、線分の回転角度θrotと、平均輝度AVG1θrot〜AVG8θrotとによって定まる点をプロットしていくことで得た曲線を、スムージング処理した曲線であってもよい。このスムージング処理としては、例えば、前記曲線に対して移動平均法を用いた処理を施す処理が考えられる。
【0097】
また、本第3の実施形態では、線分SCを、中心点P1を中心に回転させることにより、環状領域A1〜A8のスキャンを行ったが、これに限らず、例えば基準ピクセルPX0を中心に線分SCを回転させてスキャンを行ってもよく、また、虹彩の画像の外縁を規定する円Cq(0)の中心点Q0を中心に線分SCを回転させてスキャンを行ってもよい。
【0098】
以上、本発明の各実施形態について説明したが、本発明は上記実施形態によって限定されるものではない。
【0099】
また、上記実施形態に係る照合装置30の機能は、専用のハードウェアによっても、また、通常のコンピュータシステムによっても実現することができる。
【0100】
また、第2の実施形態において照合装置30の補助記憶部30cに記憶されているプログラムは、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical disk)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータにインストールすることにより、上述の処理を実行する装置を構成することとしてもよい。
【0101】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、コンピュータにダウンロード等するようにしても良い。
【0102】
また、プログラムは、通信ネットワークを介して転送しながら起動実行することとしてもよい。
【0103】
また、プログラムは、全部又は一部をサーバ装置上で実行させ、その処理に関する情報を通信ネットワークを介して送受信しながら、上述の画像処理を実行することとしてもよい。
【0104】
なお、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータにダウンロード等しても良い。
【0105】
なお、本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。つまり、本発明の範囲は、実施形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0106】
本発明の生体認証装置、生体認証方法、及びプログラムは、眼の虹彩のパターンを用いて認証を行うのに適している。
【符号の説明】
【0107】
1〜3 生体認証装置
10 撮像装置
30 照合装置
30a CPU
30b 主記憶部
30c 補助記憶部
30d 表示部
30e 入力部
30f インターフェイス部
30g システムバス
31 基準ピクセル設定部
32 瞳孔中心位置特定部
33 虹彩画像特定部
34 環状領域規定部
35 微小領域規定部
36 平均輝度演算部
37 特性曲線生成部
38 コード生成部
39 照合部
P デジタル画像
P1 画像
P2 二値画像
P3 画像
PX ピクセル
PX0 基準ピクセル
PG1 低輝度ピクセル群
PG2 高輝度ピクセル群
F1、F2 領域
A1〜A8 環状領域
C、Cq 円
【技術分野】
【0001】
本発明は、生体認証装置、生体認証方法及びプログラムに係り、更に詳しくは、眼の虹彩のパターンを用いて認証を行う生体認証装置、眼の虹彩のパターンを用いて認証を行うための生体認証方法及びプログラムに関する。
【背景技術】
【0002】
近年、文字や記号の組み合わせからなるコードやパスワードに代えて、対象者の身体的特徴を用いて認証を行う生体認証技術の研究開発が盛んに行われている。生体認証には、例えば、指紋、手の甲の静脈パターン、眼の虹彩パターン、声紋など、個人相互間で不同な身体的特徴が用いられるのが一般的である。特に、指紋や手の甲の静脈パターンを用いた認証装置は、認証精度が向上し、装置のコストダウンが進むにつれて、ATM(Automatic Teller Machine)やパーソナルコンピュータ(PC)など、種々の装置に搭載されるに至っている。
【0003】
しかしながら、指紋や手の甲の静脈パターンを用いた認証では、対象者が指や手などの身体の一部を装置に接触させるか、ある程度近づける必要がある。このため、最近では眼の虹彩パターンを用いた生体認証技術が注目されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3307936号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
虹彩のパターンを用いた認証システムでは、照合精度と照合速度との関係がトレードオフの関係にある。また、認証システムでは、その性質上照合精度は一定のレベル以上に維持されるべきである。このため、認証システムにおける処理速度の向上は実現が困難な課題の1つとなっている。
【0006】
本発明は、上述の事情の下になされたもので、眼の虹彩パターンに関する情報同士の照合を短時間に行うことができる装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る生体認証装置は、虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する変化量算出手段と、前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成するコード生成手段と、を備える。
【0008】
また、本発明に係る生体認証方法は、虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する工程と、前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する工程と、を含む。
【0009】
また、本発明に係るプログラムは、コンピュータを、虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する手段、前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する手段、として機能させる。
【発明の効果】
【0010】
眼の虹彩パターンに関する情報同士の照合を短時間に行うことができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態に係る生体認証装置1のブロック図である。
【図2】デジタル画像Pを示す図である。
【図3】デジタル画像Pを簡略化して示して示す画像P1を示す図である。
【図4】二値画像P2を示す図である。
【図5】サンプル画像SAMP1を示す図である。
【図6】図6(A)及び図6(B)は、基準ピクセル設定部31の動作を説明するための図(その1、その2)である。
【図7】基準ピクセル設定部31の動作を説明するための図(その3)である。
【図8】基準ピクセル設定部31の処理により得られる画像P3を示す図である。
【図9】基準ピクセル設定部31の処理結果を説明するための画像を示す図である。
【図10】瞳孔を構成する低輝度ピクセル群PG1と、高輝度ピクセル群PG2とを示す図である。
【図11】瞳孔中心位置特定部32の動作を説明するための図(その1)である。
【図12】瞳孔中心位置特定部32の動作を説明するための図(その2)である。
【図13】虹彩画像特定部33の動作を説明するための図(その1)である。
【図14】図14(A)は、虹彩画像特定部33の動作を説明するための図(その2)である。図14(B)は、特性曲線SLを示す図である。
【図15】環状領域規定部34の動作を説明するための図(その1)である。
【図16】環状領域規定部34の動作を説明するための図(その2)である。
【図17】環状領域規定部34の動作を説明するための図(その3)である。
【図18】微小領域規定部35の動作を説明するための図である。
【図19】図19(A)は、特性曲線S(1)を示す図である。また、図19(B)は、特性曲線S(1)の生成方法を説明するための図である。
【図20】図20(A)及び図20(B)は、照合対象コードの生成方法を説明するための図である。
【図21】本発明の第2の実施形態に係る生体認証装置2のブロック図である。
【図22】照合装置30の動作を示すフローチャート(その1)である。
【図23】照合装置30の動作を示すフローチャート(その2)である。
【図24】本発明の第3の実施形態に係る生体認証装置3のブロック図である。
【図25】平均輝度演算部35の動作を説明するための図である。
【図26】特性曲線g(1)の生成方法を説明するための図である。
【発明を実施するための形態】
【0012】
《第1の実施形態》
以下、本発明の第1の実施形態を、図1〜図20を参照しつつ説明する。図1は本実施形態に係る生体認証装置1の概略的な構成を示すブロック図である。生体認証装置1は、対象者の虹彩パターンを用いて認証を行う装置であり、撮像装置10、及び照合装置30を備えている。
【0013】
前記撮像装置10は、例えば近赤外線を含む照明光を照射する照明装置と、赤外線以外の可視光線をカットする赤外線フィルタを有する赤外線カメラを含んで構成されている。そして、対象者の眼を撮影することにより得られたデジタル画像を、照合装置30へ出力する。図2には、撮像装置10によって撮像されたデジタル画像Pが示されている。図2を見るとわかるように、撮像装置10では、少なくとも、対象者の虹彩と、その周囲に存在する瞼や睫などの一部が撮像される。また、撮像装置10では、赤外光を用いた撮像が行われるため、デジタル画像Pはグレースケール画像となる。
【0014】
図3に示される画像P1は、デジタル画像Pについて、虹彩とその周辺に存在する部分の輪郭を、線のみで簡略化して示した画像である。以下の説明は、便宜上、デジタル画像Pと、このデジタル画像Pに対応した画像P1を用いて行うものとする。
【0015】
図1に戻り、前記照合装置30は、基準ピクセル設定部31、瞳孔中心位置特定部32、虹彩画像特定部33、環状領域規定部34、微小領域規定部35、平均輝度演算部36、特性曲線生成部37、コード生成部38、及び照合部39を有している。
【0016】
前記基準ピクセル設定部31は、まず、撮像装置10から出力されたデジタル画像Pを構成する複数のピクセルの中から、輝度が所定値以下の低輝度ピクセルを抽出する。低輝度ピクセルの抽出は、例えば、デジタル画像Pを二値画像に変換し、この時に現れる輝度が0となるピクセルを抽出することにより行うことができる。一例として図4には、デジタル画像Pを、所定の閾値を用いて画像変換することにより得られた二値画像P2が示されている。基準ピクセル設定部31は、図4に示される二値画像P2の黒色部分を構成する低輝度ピクセルを抽出する。なお、この時の閾値は、デジタル画像Pの撮像条件等によって決定することができる。そして、本実施形態では、二値画像P2に、虹彩の画像を構成するピクセルが高輝度ピクセルとして現れ、瞳孔の画像を構成するピクセルが低輝度ピクセルとして現れるように、閾値を決定する。このように、閾値を決定することで、二値画像P2には、主として瞳孔と、睫などの画像を形成していたピクセルが低輝度ピクセルとして現れる。
【0017】
次に、基準ピクセル設定部31は、抽出された低輝度ピクセルを順次選択し、選択した低輝度ピクセルから所定の距離以内にある複数のピクセルそれぞれに、例えば値1を付与する。以下、サンプル画像SAMP1を示す図5を参照しつつ説明する。
【0018】
図5は、一例として16行20列のマトリクス状に配置されたピクセルPX(m、n)からなる画像SAMP1が示されている。なお、mは1から16までの行番を表す整数であり、nは1から20までの列番を表す整数である。この画像SAMP1は、3つの低輝度ピクセルPX(5、12)、PX(8、8)、PX(9、12)と、それ以外の高輝度ピクセルPXからなる二値画像である。基準ピクセル設定部31は、まず5行目の低輝度ピクセルPX(5、12)を選択する。そして、図6(A)を参照するとわかるように、低輝度ピクセルPX(5、12)と、この低輝度ピクセルPX(5、12)から所定の距離以内にあるピクセルPXそれぞれに1を付与する。
【0019】
次に、基準ピクセル設定部31は、8行目の低輝度ピクセルPX(8、8)を選択する。そして、図6(B)を参照するとわかるように、低輝度ピクセルPX(8、8)と、この低輝度ピクセルPX(8、8)から所定の距離以内にあるピクセルPXそれぞれに1を付与する。ここで、6行目のピクセルPX(6、10)と、7行目のピクセルPX(7、10)については、低輝度ピクセルPX(5、12)及びPX(8,8)それぞれに対して所定の距離以内にある。このため、当該処理が完了した時点では、付与された値の積算値が2となっている。
【0020】
次に、基準ピクセル設定部31は、9行目の低輝度ピクセルPX(9、12)を選択する。そして、図7を参照するとわかるように、低輝度ピクセルPX(9、12)と、この低輝度ピクセルPX(9、12)から所定の距離以内にあるピクセルPXそれぞれに1を付与する。ここで、7行目のピクセルPX(7、10)については、低輝度ピクセルPX(5、12)、PX(8,8)、及びPX(9、12)それぞれに対して所定の距離以内にある。このため、当該処理が完了した時点では、付与された値の積算値が3となっている。基準ピクセル設定部31は、上述した処理を、画像に含まれる低輝度ピクセルすべてに対して実行する。
【0021】
基準ピクセル設定部31は、二値画像P2を構成する各低輝度ピクセルに対して、上述の処理を施す。図8には、基準ピクセル設定部31が、二値画像P2の黒色部分を構成する低輝度ピクセルに対して上述の処理を行った後の結果を概念的に示す画像P3が示されている。画像P3では、付与された値の積算値が最も大きいピクセルほど高い濃度で着色された状態で表示されている。
【0022】
そして、基準ピクセル設定部31は、付与された値の積算値が最も大きいピクセルを、基準ピクセルPX0に設定し、この基準ピクセルPX0の位置情報を瞳孔中心位置特定部32に出力する。この基準ピクセルPX0は、図8に示されるように、画像P3において最も高い濃度で示されたピクセルの位置と一致する。また、図9は、画像P1と画像P3とを重ねて示した図である。図9に示されるように、基準ピクセルPX0の位置は、画像P1に示される眼の瞳孔の中心とほぼ一致する。
【0023】
一例として、図10には二値画像P2に含まれる瞳孔を構成する低輝度ピクセル群PG1と、高輝度ピクセル群PG2とが示されている。通常、瞳孔を含む眼の画像を撮影すると、角膜の表面で反射した反射光の影響で、瞳孔を構成するピクセルのうちの一部のピクセルの輝度が高くなってしまう。このため、二値画像P2に現れる瞳孔を構成するピクセル群は、低輝度ピクセル群PG1と、高輝度ピクセル群PG2とに2分される。したがって、瞳孔の画像を形成するピクセルのうち、高輝度ピクセル群を構成するピクセルの数が増加するにつれて、基準ピクセルPX0の位置が瞳孔中心から大きくずれてしまうことが考えられる。そこで、瞳孔中心位置特定部32は、二値画像P2における瞳孔を構成する低輝度ピクセル群PG1の分布と、基準ピクセルPX0の位置情報とに基づいて、瞳孔の中心位置の検出を行う。
【0024】
図11に示されるように、瞳孔中心位置特定部32は、基準ピクセルPX0を中心とする円C(1)を設定する。この円C(1)の半径は、瞳孔の半径よりも十分に小さくなるように設定する。例えば、円C(1)の半径は、低輝度ピクセル群PG1のX軸方向又はY軸方向の分布範囲などを考慮して決定することができる。
【0025】
次に、瞳孔中心位置特定部32は、基準ピクセルPX0を中心とし、円C(1)の半径よりも大きい半径を有する円C(2)を設定する。
【0026】
次に、瞳孔中心位置特定部32は、円C(1),C(2)それぞれの面積S1,S2と、円C(1),C(2)それぞれの内側にある低輝度ピクセルの個数N1、N2を算出する。そして、円C(1)及び円C(2)の面積の差(S2−S1)に対する、それぞれの円内の低輝度ピクセルの個数(N2−N1)の比R1((N2−N1)/(S2−S1))を算出する。
【0027】
次に、瞳孔中心位置特定部32は、算出した比R1の値が、所定の値以上であるか否かを判定する。そして、この判定が肯定された場合には、瞳孔中心位置特定部32は、円C(2)の半径より大きい半径を有する円C(3)を設定する。そして、瞳孔中心位置特定部32は、円C(2),C(3)それぞれの面積S2,S3と、円C(2),C(3)それぞれの内側にある低輝度ピクセルの個数N2、N3を算出する。そして、円C(2)及び円C(3)の面積の差(S3−S2)に対する、それぞれの円内の低輝度ピクセルの個数(N3−N2)の比R2((N3−N2)/(S3−S2))を算出する。
【0028】
次に、瞳孔中心位置特定部32は、算出した比R2の値が、所定の値以上であるか否かを判定する。以下、瞳孔中心位置特定部32は、上述の処理を、所定の値以下の比RNが算出されるまで、繰り返し行う。これにより、二値画像P2の瞳孔の画像上に規定される円はその大きさが、徐々に拡大されていく。
【0029】
一方、所定の値以下の比RNが算出された場合には、瞳孔中心位置特定部32は、この時の円C(N)を用いて、瞳孔の中心位置を特定する。なお、所定の値以下の比RNが算出される場合とは、例えば、図11に示されるように、低輝度ピクセル群PG1及び高輝度ピクセル群PG2によって規定される領域からはみ出た状態の円C(4)が設定された場合である。
【0030】
円C(1)、C(2)、及びC(3)に関しては、その内部に含まれるピクセルは、瞳孔を形成するピクセルであり、低輝度ピクセル群PG1又は高輝度ピクセル群PG2のいずれかに属するピクセルである。この場合には、算出される比Rの値はほぼ一定となる。一方、円C(4)に含まれるピクセルは、瞳孔を形成する低輝度ピクセル群PG1及び高輝度ピクセル群PG2に属するピクセル以外のピクセルが含まれる。これらのピクセルは、虹彩の画像を形成する高輝度ピクセルである。このため、円C(4)の内部に含まれる低輝度ピクセルの数N4が減少し、結果的に、算出される比R3(=(N4−N3)/(S4−S3))の値は、所定の値より小さくなる。
【0031】
次に、瞳孔中心位置特定部32は、図12を参照するとわかるように、円C(4)を基準ピクセルPX0を基準位置として移動させながら、円C(4)に含まれる低輝度ピクセルの数が最大となったときの円C(4)の中心位置P1を探索する。そして、探索した位置P1を瞳孔中心の位置と特定する。
【0032】
なお、円C(1)〜C(N)の半径は、例えば、ピクセルの大きさを基準に例えば1ピクセルから数ピクセル分だけ異なるように設定することが考えられる。また、瞳孔中心の検出精度は、円C(N−1)の半径と、円C(N)の半径との差が小さくなるほど向上する。
【0033】
前記虹彩画像特定部33は、図13に示されるように、画像P1上に位置P1が原点となるXY座標系を定義する。そして、画像P1上に位置P1を起点とし、X軸と15度の角度をなす直線L1、L2とによって規定される三角形の領域F1と領域F2とを規定する。次に、図14(A)に示されるように、虹彩画像特定部33は、領域F1を、X軸と直線L1とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。また、領域F2を、X軸と直線L2とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。
【0034】
図14(B)には、位置xと、円弧状の微小領域に含まれるピクセルの輝度の平均値との関係を示す特性曲線SLが示されている。前記虹彩画像特定部33は、領域F1又は領域F2に属する微小領域ごとに、微小領域に含まれるピクセルの輝度の平均値を算出する。そして、微小領域のX軸上の位置と対応する輝度の平均値との関係を表す特性曲線SLを算出する。次に、この特性曲線SLの変化度合いに基づいて、X軸と虹彩の外縁との交点のX座標A、Dを求める。
【0035】
交点のX座標A、Dは、例えば、特性曲線SLをX軸上の位置xで微分して得られた微分値と、所定の閾値とを比較することで特定することができる。図14(B)の特性曲線SLを参照するとわかるように、一般に、虹彩の領域と白目の境界では輝度の平均値の変化度合に連続性が見られる。また、虹彩の領域から白目の領域に変わる領域では、輝度の平均値の変化度合いは他の部分よりも大きくなる。この性質を利用することにより、特性曲線SLの微分値を用いて、X軸と虹彩の外縁との交点のX座標A、Dをほぼ正確に求めることができる。
【0036】
そして、虹彩画像特定部33は、図15を参照するとわかるように、画像P1上の位置P1を中心とする円C(4)と、例えば中心がX軸上に位置し、XY座標系における点(A、0)と、点(D、0)とを通る円Cq(0)、すなわち、点((A+D)/2、0)を中心Q0とし、半径(D−A)/2の円Cq(0)とで規定される領域に虹彩の画像が位置していると特定する。そして、特定した結果を環状領域規定部34へ通知する。
【0037】
図15に示されるように、瞳孔の外縁にほぼ一致する円C(4)の中心P1と、虹彩の外縁にほぼ一致する円Cq(0)の中心Q0は、一般的に一致しない。その理由は、人の左右の眼の視線は通常平行ではないため、対象者の正面から眼を撮影した場合には、撮像装置10の光軸と視線とが平行とはならない。このため、球面状の虹彩は、撮像装置10に対して斜めから撮影される。したがって、デジタル画像上では、虹彩の中心と瞳孔の中心とがオフセットしてしまうのである。
【0038】
前記環状領域規定部34は、上述の事情を考慮して、図16に示されるように、瞳孔の外縁にほぼ一致する円C(4)と、虹彩の外縁にほぼ一致する円Cq(0)とによって規定される領域を、7つの円Cq(1)〜円Cq(7)を用いて、8つの環状領域に区分する。以下、具体的に説明する。
【0039】
まず、環状領域規定部34は、円C(4)の中心P1と、円Cq(0)の中心Q0との距離dを計測する。そして、中心Q0のX座標に距離dを8で除した値をそれぞれ加算していくことで、円Cq(1)〜円Cq(7)の中心Q1〜中心Q7を算出する。なお、中心Q1〜中心Q7の座標はそれぞれ、Q1((A+D)/2+d/8、0)、Q2((A+D)/2+d/4、0)、Q3((A+D)/2+3d/8、0)、Q4((A+D)/2+d/2、0)、Q5((A+D)/2+5d/8、0)、Q6((A+D)/2+3d/4、0)、Q7((A+D)/2+7d/8、0)と計算される。
【0040】
次に、環状領域規定部34は、円Cq(0)の半径r0から、円C(4)の半径rと円Cq(0)の半径r0との差を8で除した値をそれぞれ減算していくことで、円Cq(1)〜円Cq(7)の半径r1〜半径r7を算出する。なお、半径r1〜半径r7は、それぞれr1:(r0−(r0−r)/8)、r2:(r0−2・(r0−r)/8)、r3:(r0−3・(r0−r)/8)、r4:(r0−4・(r0−r)/8)、r5:(r0−5・(r0−r)/8)、r6:(r0−6・(r0−r)/8)、r7:(r0−7・(r0−r)/8)と計算される。
【0041】
次に、環状領域規定部34は、上述のように算出した中心Q1〜中心Q7と、半径r1〜半径r7に関する算出結果に基づいて、図16に示されるように、円Cq(0)と円C(4)とで規定される領域に、7つの円Cq(1)〜円Cq(7)を規定する。これにより、図17を参照するとわかるように、画像P1に含まれる虹彩の画像が7つの円Cq(1)〜円Cq(7)によって、8つの環状領域A1〜A8に区分される。そして、環状領域規定部34は、8つの環状領域A1〜A8に関する情報を、微小領域規定部35へ出力する。
【0042】
前記微小領域規定部35は、8つの環状領域A1〜A8それぞれを、例えば256の微小領域に区分する。具体的には、円C(4)、円Cq(1)〜円Cq(7)を、中心角が等しい256の円弧に分割するとともに、隣接する円同士の対応関係にある1組の円弧と、端点を結ぶ線分を規定していく。以下、図18を参照しつつ説明する。
【0043】
図18は、円C(4)と円Cq(7)とによって規定された環状領域A1を、256の微小領域に区分する様子を示す図である。図18を参照するとわかるように、微小領域規定部35は、円C(4)と円Cq(7)を、それぞれの円とX軸との交点を基点として、中心角がα(360/256)の円弧にそれぞれ区分するとともに、対応関係にある円弧の端点を結ぶ線分を規定することで、環状領域A1を、256個の微小領域A11〜A1256に区分する。同様に、微小領域規定部35は、環状領域A2〜A8それぞれを、微小領域A21〜A2256、微小領域A31〜A3256、微小領域A41〜A4256、微小領域A51〜A5256、微小領域A61〜A6256、微小領域A71〜A7256、微小領域A81〜A8256に区分する。そして、微小領域規定部35は、上記微小領域に関する情報を平均輝度演算部36へ出力する。
【0044】
前記平均輝度演算部36は、まず、環状領域A1に属する微小領域A11〜A1256ごとに、微小領域A1i(i=1、2、…、256)に含まれるピクセルの輝度の平均値AVG1iを求める。以下順次、微小領域規定部35は、環状領域A2に属する微小領域A2iにそれぞれに含まれるピクセルの輝度の平均値AVG2iを求める。次に、環状領域A3に属する微小領域A3iにそれぞれに含まれるピクセルの輝度の平均値AVG3iを求める。次に、環状領域A4に属する微小領域A4iにそれぞれに含まれるピクセルの輝度の平均値AVG4iを求める。次に、環状領域A5に属する微小領域A5iにそれぞれに含まれるピクセルの輝度の平均値AVG5iを求める。次に、環状領域A6に属する微小領域A6iにそれぞれに含まれるピクセルの輝度の平均値AVG6iを求める。次に、環状領域A7に属する微小領域A7iにそれぞれに含まれるピクセルの輝度の平均値AVG7iを求める。次に、環状領域A8に属する微小領域A8iにそれぞれに含まれるピクセルの輝度の平均値AVG8iを求める。そして、平均輝度演算部36は、上記平均値に関する情報を特性曲線生成部37へ出力する。
【0045】
図19(A)には、微小領域A1iの極座標と、微小領域A1iごとに算出された輝度の平均値との関係を示す特性曲線S(1)が示されている。前記特性曲線生成部37は、まず、横軸を極座標とし縦軸を輝度とする座標上に、微小領域A1iの極座標θiと、微小領域A1iごとに算出された輝度の平均値AVG11とで定まる点をプロットしていく。そして、これらの点を通る曲線を特性曲線S(1)として生成する。以下、具体的に説明する。
【0046】
図18を参照するとわかるように、例えば、微小領域A1iの極座標θiの値は(i−1)・αで示すことができる。したがって、微小領域A1iの極座標θiの値は、微小領域A11の極座標θ1の値が0、微小領域A12の極座標θ2の値がα、微小領域A13の極座標θ3の値が2α、微小領域A14の極座標θ4の値が3αというように決定される。
【0047】
特性曲線生成部37は、図19(B)を参照するとわかるように、順次、微小領域A11の極座標θ1と輝度の平均値AVG11で定まる点P11、微小領域A12の極座標θ2と輝度の平均値AVG12で定まる点P12、微小領域A13の極座標θ3と輝度の平均値AVG13で定まる点P13というように、まず微小領域A1iの極座標θiと輝度の平均値AVG1iとで定まる256個の点P1iを、上述の座標上にプロットしていく。次に、256個の点P1iを通る曲線を生成し、この曲線を特性曲線S(1)とする。
【0048】
以下順次、特性曲線生成部37は、微小領域A2iの極座標と、微小領域A2iごとに算出された輝度の平均値との関係を示す特性曲線S(2)を算出する。次に、微小領域A3iの極座標と、微小領域A3iごとに算出された輝度の平均値との関係を示す特性曲線S(3)を算出する。次に、微小領域A4iの極座標と、微小領域A4iごとに算出された輝度の平均値との関係を示す特性曲線S(4)を算出する。次に、微小領域A5iの極座標と、微小領域A5iごとに算出された輝度の平均値との関係を示す特性曲線S(5)を算出する。次に、微小領域A6iの極座標と、微小領域A6iごとに算出された輝度の平均値との関係を示す特性曲線S(6)を算出する。次に、微小領域A7iの極座標と、微小領域A7iごとに算出された輝度の平均値との関係を示す特性曲線S(7)を算出する。次に、微小領域A8iの極座標と、微小領域A8iごとに算出された輝度の平均値との関係を示す特性曲線S(8)を算出する。そして、特性曲線S(1)〜S(8)に関する情報を、コード生成部38へ出力する。
【0049】
コード生成部38は、環状領域A1の輝度の変化を示す特性曲線S(1)のθiにおける傾きをM1(i)をそれぞれ算出する。そして、この傾きの極性を極座標θiに準じて配列することでコード1[M1(1)、M1(2)、…M1(256)]を生成する。例えば、図20(A)の表に示されるように、特性曲線S(1)のθiにおける傾きの極性が、+、−、及び零の三値うちのいずれかとなる場合には、図20(B)の表に示されるように、コード1[M1(1)、M1(2)、…M1(256)]は、+、−、及び零が配列されてなるコードとなる。
【0050】
以下同様に、コード生成部38は、コード2[M2(1)、M2(2)、…M2(256)]、コード3[M3(1)、M3(2)、…M3(256)]、コード4[M4(1)、M4(2)、…M4(256)]、コード5[M5(1)、M5(2)、…M5(256)]、コード2[M6(1)、M6(2)、…M6(256)]、コード2[M7(1)、M7(2)、…M7(256)]、コード2[M8(1)、M8(2)、…M8(256)]を生成する。そして、コード生成部38は、上述の8つのコード1〜8を1つの照合対象コード群として照合部39へ出力する。
【0051】
照合部39には、予め上述した処理と同様の処理によって特定された虹彩の画像に基づき、かつ特定の個人情報と関連づけられた8つのコードからなる複数のコード群に関するデータが蓄積されている。照合部39は、上述の照合対象コード群と、予め蓄積されたコード群(以下、照合コード群という)それぞれとの照合を行う。そして、照合対象コード群に対する類似度合いが所定の値以上の照合コード群が特定された場合には、その結果と、照合コード群に関連づけられた個人情報を外部へ出力する。一方、対象コード群に対する類似度合いが所定の値以上の照合コード群が特定されなかった場合には、その結果を外部へ出力する。
【0052】
以上説明したように、本第1の実施形態では、虹彩の画像が分割されることにより形成された8つの環状領域A1〜A8に応じた特性曲線S(1)〜S(8)が生成され、これらの特性曲線の傾きの極性が配列されることにより照合対象コード1〜8がそれぞれ生成される。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードであるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【0053】
具体的には、撮像装置10からの画像に基づいて生成された特性曲線S(1)〜S(8)の波形と、予め取得された特性曲線の波形とを直接照合する場合に比べて、照合するデータ量が少なくてすむ。したがって、照合対象コードの照合を短時間に行うことができる。
【0054】
また、本第1の実施形態では、環状領域A1〜A8を区分することにより256の微小領域を設定したが、これに限らず、隣接する円同士の対応関係にある1組の円弧の端点を結んで形成される四角形の領域を、それぞれの環状領域A1〜A8に沿って設定してもよい。
【0055】
また、本第1の実施形態では、環状領域A1〜A8それぞれに256の微小領域を規定した場合について説明したが、これに限らず、例えば、256以下の微小領域を規定してもよく、256以上の微少領域を規定してもよい。
【0056】
《第2の実施形態》
次に、本発明の第2の実施形態を、図21〜図23を参照しつつ説明する。なお、第1の実施形態と同一又は同等の構成については、同等の符号を用いるとともに、その説明を省略又は簡略する。
【0057】
本実施形態に係る生体認証装置2は、照合装置30が、一般的なコンピュータ、又はワークステーションなどの装置と同様の構成によって実現されている点で、第1の実施形態に係る生体認証装置1と相違している。
【0058】
図21は、生体認証装置2の物理的な構成を示すブロック図である。図21に示されるように、生体認証装置2は、撮像装置10、及びコンピュータからなる照合装置30を備えている。
【0059】
前記照合装置30は、CPU(Central Processing Unit)30a、主記憶部30b、補助記憶部30c、表示部30d、入力部30e、インターフェイス部30f、及び上記各部を相互に接続するシステムバス30gを含んで構成されている。
【0060】
CPU30aは、補助記憶部30cに記憶されているプログラムに従って、撮像装置10によって撮像された画像Pに対して、後述する画像処理を実行する。
【0061】
主記憶部30bは、RAM(Random Access Memory)等を含んで構成され、CPU30aの作業領域として用いられる。
【0062】
補助記憶部30cは、ROM(Read Only Memory)、磁気ディスク、半導体メモリ等の不揮発性メモリを含んで構成されている。この補助記憶部30cは、CPU30aが実行するプログラム、及び各種パラメータなどを記憶している。また、CPU30aによる処理結果などを含む情報を記憶する。
【0063】
表示部30dは、CRT(Cathode Ray Tube)またはLCD(Liquid Crystal Display)などを含んで構成され、CPU30aの処理結果を表示する。本実施形態では、デジタル画像Pに対する処理が実行されるごとに、その処理結果としての二値画像P2、画像P3などが表示される。
【0064】
入力部30eは、キーボードやマウス等のポインティングデバイスを含んで構成されている。オペレータの指示は、この入力部30eを介して入力され、システムバス30gを経由してCPU30aに通知される。
【0065】
インターフェイス部30fは、シリアルインターフェイスまたはLAN(Local Area Network)インターフェイス等を含んで構成されている。撮像装置10は、インターフェイス部30fを介してシステムバス30gに接続される。
【0066】
図22及び図23のフローチャートは、照合装置30のCPU30aによって実行されるプログラムの一連の処理アルゴリズムに対応している。以下、図22及び図23を参照しつつ、照合装置30における画像処理について説明する。なお、この画像処理は、CPU30aが、補助記憶部30cから読み出したプログラムに従って、主記憶部30b、補助記憶部30c、表示部30d、インターフェイス部30fを統括的に制御することにより実現される。
【0067】
まず、最初のステップS101では、CPU30aは、撮像装置10によって撮像されたデジタル画像Pを構成する複数のピクセルの中から、輝度が所定値以下の低輝度ピクセルを抽出する。具体的には、デジタル画像Pを、所定の閾値を用いて画像変換することにより得られた二値画像P2の中から低輝度ピクセルを抽出する。
【0068】
次のステップS102では、CPU30aは、抽出された低輝度ピクセルを順次選択し、選択した低輝度ピクセルから所定の距離以内にある複数のピクセルそれぞれに、例えば値1を付与する。
【0069】
次のステップS103では、CPU30aは、付与された値の積算値が最も大きいピクセルを、基準ピクセルPX0に設定する。図9に示されるように、基準ピクセルPX0の位置は、画像P1に示される目の瞳孔の中心とほぼ一致する。
【0070】
次のステップS104では、CPU30aは、基準ピクセルPX0を中心とする円C(1)と、円C(1)の半径よりも大きい半径を有する円C(2)を設定する。
【0071】
次のステップS105では、CPU30aは、円C(1),C(2)それぞれの面積S1,S2と、円C(1),C(2)それぞれの内側にある低輝度ピクセルの個数N1、N2を演算する。そして、円C(1)及び円C(2)の面積の差(S2−S1)に対する、それぞれの円内の低輝度ピクセルの個数(N2−N1)の比R1((N2−N1)/(S2−S1))を算出する。
【0072】
次のステップS106では、CPU30aは、比R1の値が、所定の値以上であるか否かを判定する。そして、ステップS106での判定が肯定された場合には、ステップS104に戻る。
【0073】
この場合、CPU30aは、新たに円C(2)の半径より大きい半径を有する円C(3)を設定する(ステップS104)。そして、円C(2),C(3)それぞれの面積S2,S3と、円C(2),C(3)それぞれの内側にある低輝度ピクセルの個数N2、N3を演算する。そして、円C(2)及び円C(3)の面積の差(S3−S2)に対する、それぞれの円内の低輝度ピクセルの個数(N3−N2)の比R2((N3−N2)/(S3−S2))を算出する(ステップS105)。以下、ステップS106での判定が否定されるまで、ステップS104〜ステップS106までの処理が繰り返される。
【0074】
一方、ステップ106での判定が否定された場合には、次のステップS107に移行する。なお、ステップS106での判定が否定される場合とは、比Rの値が、所定の値より小さい場合である。例えば、図11に示されるように、ピクセル群PG1、PG2によって規定される領域からはみ出た状態の円C(4)が設定された場合は、ステップS106での判定が否定される。
【0075】
次のステップS107では、CPU30aは、円C(4)を基準ピクセルPX0を基準位置として移動させながら、円C(4)に含まれる低輝度ピクセルの数が最大となったときの円C(4)の中心位置P1を探索する。そして、探索した位置P1を瞳孔中心の位置と特定する。
【0076】
次のステップS108では、CPU30aは、画像P1上に位置P1が原点となるXY座標系を定義する。そして、画像P1上に位置P1を起点とし、X軸と15度の角度をなす直線L1、L2とによって規定される三角形の領域F1と領域F2とを規定する。次に、図14(A)に示されるように、CPU30aは、領域F1を、X軸と直線L1とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。また、領域F2を、X軸と直線L2とで規定される角を中心角とする複数の円弧によって区分することで、複数の円弧状の微小領域を設定する。
【0077】
次のステップS109では、CPU30aは、領域F1又は領域F2に属する微小領域ごとに、微小領域に含まれるピクセルの輝度の平均値を算出する。そして、微小領域のX軸上の位置と対応する輝度の平均値との関係を表す特性曲線SLを算出する。
【0078】
次のステップS110では、CPU30aは、この特性曲線SLの変化度合いに基づいて、X軸と虹彩の外縁との交点のX座標A及びDを求める。そして、図15を参照するとわかるように、画像P1上の円C(4)と、円Cq(0)とで規定される領域に虹彩の画像が位置していると特定する。
【0079】
次のステップS111では、CPU30aは、図16に示されるように、瞳孔の外縁にほぼ一致する円C(4)と、虹彩の外縁にほぼ一致する円Cq(0)とによって規定される領域を、7つの円Cq(1)〜円Cq(7)を用いて、8つの環状領域に区分する。
【0080】
次のステップS112では、CPU30aは、8つの環状領域A1〜A8それぞれを、例えば256の微小領域に区分する。具体的には、円C(4)と円Cq(7)を、それぞれの円とX軸との交点を基点として、中心角がα(360/256)の円弧にそれぞれ区分するとともに、対応関係にある円弧の端点を結ぶ線分を規定することで、環状領域A1を、256個の微小領域A11〜A1256に区分する。同様に、微小領域規定部35は、環状領域A2〜A8それぞれを、微小領域A21〜A2256、微小領域A31〜A3256、微小領域A41〜A4256、微小領域A51〜A5256、微小領域A61〜A6256、微小領域A71〜A7256、微小領域A81〜A8256に区分する。
【0081】
次のステップS113では、CPU30aは、まず、環状領域A1に属する微小領域A11〜A1256ごとに、微小領域A1i(i=1、2、…、256)に含まれるピクセルの輝度の平均値AVG1iを求める。以下順次、微小領域規定部35は、環状領域A2〜A8に属する微小領域A2i〜A8iそれぞれに含まれるピクセルの輝度の平均値AVG2i〜AVG8iを求める。
【0082】
次のステップS114では、CPU30aは、微小領域A1i〜A8iの極座標と、微小領域A1i〜A8iごとに算出された輝度の平均値との関係を示す特性曲線S(1)〜S(8)を算出する。
【0083】
次のステップS115では、CPU30aは、環状領域A1の輝度の変化を示す特性曲線S(1)のθiにおける傾きをM1(i)をそれぞれ算出する。そして、この傾きの極性を極座標θiに準じて配列することでコード1[M1(1)、M1(2)、…M1(256)]を生成する。同様に、コード生成部38は、コード2[M2(1)、M2(2)、…M2(256)]、コード3[M3(1)、M3(2)、…M3(256)]、コード4[M4(1)、M4(2)、…M4(256)]、コード5[M5(1)、M5(2)、…M5(256)]、コード2[M6(1)、M6(2)、…M6(256)]、コード2[M7(1)、M7(2)、…M7(256)]、コード2[M8(1)、M8(2)、…M8(256)]を生成する。
【0084】
次のステップS116では、CPU30aは、上述の照合対象コード群と、予め蓄積されたコード群(以下、照合コード群という)それぞれとの照合を行う。そして、照合対象コード群に対する類似度合いが所定の値以上の照合コード群が特定された場合には、その結果と、照合コード群に関連づけられた個人情報を外部へ出力する。一方、対象コード群に対する類似度合いが所定の値以上の照合コード群が特定されなかった場合には、その結果を外部へ出力する。
【0085】
以上説明したように、本第2の実施形態では、虹彩の画像が分割されることにより形成された8つの環状領域A1〜A8に応じた特性曲線S(1)〜S(8)が生成され、これらの特性曲線の傾きの極性が配列されることにより照合対象コード1〜8がそれぞれ生成される。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードであるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【0086】
具体的には、撮像装置10からの画像に基づいて生成された特性曲線S(1)〜S(8)の波形と、予め取得された特性曲線の波形とを直接照合する場合に比べて、照合するデータ量が少なくてすむ。したがって、照合対象コードの照合を短時間に行うことができる。
【0087】
《第3の実施形態》
次に、本発明の第3の実施形態を、図24を参照しつつ説明する。なお、第1の実施形態、及び第2の実施形態と同一又は同等の構成については、同等の符号を用いるとともに、その説明を省略又は簡略する。
【0088】
図24は、本実施形態に係る生体認証装置3のブロック図である。図24に示されるように、生体認証装置3は、環状領域A1〜A8を区分して微少領域を規定する微小領域規定部35を有していない点と、照合装置30を構成する平均輝度演算部36が、異なる動作をする点で、第1の実施形態に係る生体認証装置1と相違している。
【0089】
以下、本実施形態に係る平均輝度演算部36の動作について説明する。一例として、図25には、環状領域A1〜A8が規定された画像P1と、円C(4)の中心点P1を中心に回転する線分SCが示されている。平均輝度演算部36は、図25に示されるように、一端が中心点P1上にあり、他端が円Cq(0)の外側にある線分SCを規定する。
【0090】
次に、この線分SCを中心点P1の回りに、矢印aに示される方向に回転させると同時に、環状領域A1〜A8ごとに、環状領域A1〜A8それぞれに含まれるピクセルのうち、線分SCと重なったピクセルの平均輝度を算出する。そして、線分の回転角度θrotと対応づけて、算出した平均輝度AVG1θrot〜AVG8θrotを特性曲線生成部37へ出力する。
【0091】
特性曲線生成部37は、横軸を角度とし、縦軸を平均輝度とする座標に、環状領域A1〜A8ごとに、線分の回転角度θrotと、平均輝度AVG1θrot〜AVG8θrotとによって定まる点をプロットしていくことで、環状領域A1〜A8にそれぞれ対応した8つの特性曲線g(1)〜g(8)を生成する。
【0092】
特性曲線g(1)〜g(8)が生成されると、コード生成部38は、まず、特性曲線g(1)について、図26を参照するとわかるように、零度を起点として角度α(360/256)ごとに、特性曲線g(1)の傾きM1(j・α)を算出する。なお、jは0から255までの整数である。本実施形態では、図26に示されるように、特性曲線g(1)上の点P1jにおける傾きM1(j・α)が順次算出される。
【0093】
そして、コード生成部38は、この傾きM1(j・α)の極性をθrotに準じて配列することで、+、−、及び零の三値の組み合わせからなるコード1[M1(0)、M1(α)、M1(2・α)…M1(255・α)]を生成する。同様に、特性曲線g(2)〜g(8)に対応したコード2[M2(0)、M2(α)、M2(2・α)…M2(255・α)]、コード3[M3(0)、M3(α)、M3(2・α)…M3(255・α)]、コード4[M4(0)、M4(α)、M4(2・α)…M4(255・α)]、コード5[M5(0)、M5(α)、M5(2・α)…M5(255・α)]、コード6[M6(0)、M6(α)、M6(2・α)…M6(255・α)]、コード7[M7(0)、M7(α)、M7(2・α)…M7(255・α)]、コード8[M8(0)、M8(α)、M8(2・α)…M8(255・α)]を生成する。そして、コード生成部38は、上述の8つのコード1〜8を1つの照合対象コード群として照合部39へ出力する。
【0094】
照合部39は、上述の照合対象コード群と、予め蓄積されたコード群(以下、照合コード群という)それぞれとの照合を行う。そして、照合対象コード群に対する類似度合いが所定の値以上の照合コード群が特定された場合には、その結果と、照合コード群に関連づけられた個人情報を外部へ出力する。一方、対象コード群に対する類似度合いが所定の値以上の照合コード群が特定されなかった場合には、その結果を外部へ出力する。
【0095】
以上説明したように、本第3の実施形態では、8つの環状領域A1〜A8それぞれが、線分SCを用いてスキャンされることにより、特性曲線g(1)〜g(8)が生成される。そして、これらの特性曲線g(1)〜g(8)の傾きの極性が、線分SCの回転角に準じて配列されることにより照合対象コード1〜8がそれぞれ生成される。これらの照合対象コード1〜8は、+、−及び零の三値の組み合わせからなるコードであるため、照合の際にハンドリングするデータ量が少なくなり、結果的に照合対象コードの照合を短時間に行うことができる。
【0096】
なお、本第3の実施形態では、線分SCの回転角度θrotと、平均輝度AVG1θrot〜AVG8θrotとによって定まる点をプロットしていくことで得た曲線を、環状領域A1〜A8にそれぞれ対応した8つの特性曲線g(1)〜g(8)として生成した。しかしながら、本発明はこれに限定されるものではなく、特性曲線g(1)〜g(8)は、線分の回転角度θrotと、平均輝度AVG1θrot〜AVG8θrotとによって定まる点をプロットしていくことで得た曲線を、スムージング処理した曲線であってもよい。このスムージング処理としては、例えば、前記曲線に対して移動平均法を用いた処理を施す処理が考えられる。
【0097】
また、本第3の実施形態では、線分SCを、中心点P1を中心に回転させることにより、環状領域A1〜A8のスキャンを行ったが、これに限らず、例えば基準ピクセルPX0を中心に線分SCを回転させてスキャンを行ってもよく、また、虹彩の画像の外縁を規定する円Cq(0)の中心点Q0を中心に線分SCを回転させてスキャンを行ってもよい。
【0098】
以上、本発明の各実施形態について説明したが、本発明は上記実施形態によって限定されるものではない。
【0099】
また、上記実施形態に係る照合装置30の機能は、専用のハードウェアによっても、また、通常のコンピュータシステムによっても実現することができる。
【0100】
また、第2の実施形態において照合装置30の補助記憶部30cに記憶されているプログラムは、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical disk)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータにインストールすることにより、上述の処理を実行する装置を構成することとしてもよい。
【0101】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、コンピュータにダウンロード等するようにしても良い。
【0102】
また、プログラムは、通信ネットワークを介して転送しながら起動実行することとしてもよい。
【0103】
また、プログラムは、全部又は一部をサーバ装置上で実行させ、その処理に関する情報を通信ネットワークを介して送受信しながら、上述の画像処理を実行することとしてもよい。
【0104】
なお、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータにダウンロード等しても良い。
【0105】
なお、本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。つまり、本発明の範囲は、実施形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0106】
本発明の生体認証装置、生体認証方法、及びプログラムは、眼の虹彩のパターンを用いて認証を行うのに適している。
【符号の説明】
【0107】
1〜3 生体認証装置
10 撮像装置
30 照合装置
30a CPU
30b 主記憶部
30c 補助記憶部
30d 表示部
30e 入力部
30f インターフェイス部
30g システムバス
31 基準ピクセル設定部
32 瞳孔中心位置特定部
33 虹彩画像特定部
34 環状領域規定部
35 微小領域規定部
36 平均輝度演算部
37 特性曲線生成部
38 コード生成部
39 照合部
P デジタル画像
P1 画像
P2 二値画像
P3 画像
PX ピクセル
PX0 基準ピクセル
PG1 低輝度ピクセル群
PG2 高輝度ピクセル群
F1、F2 領域
A1〜A8 環状領域
C、Cq 円
【特許請求の範囲】
【請求項1】
虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する変化量算出手段と、
前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成するコード生成手段と、
を備える生体認証装置。
【請求項2】
前記変化量算出手段は、
前記虹彩のデジタル画像を、複数の環状領域に区分する第1区分手段と、
前記環状領域それぞれを、前記環状領域の内側の縁を規定する円の中心を原点とする極座標に対応した複数の微小領域に区分する第2区分手段と、
前記環状領域ごとに、前記微小領域に含まれるピクセルの輝度の平均値を算出する演算手段と、
前記環状領域ごとに算出された輝度の平均値の変化量を算出する算出手段と、
を有する請求項1に記載の生体認証装置。
【請求項3】
前記変化量算出手段は、
前記虹彩のデジタル画像を、複数の環状領域に区分する第1区分手段と、
前記虹彩の内側の縁を規定する円内の基準点と、前記虹彩の外側の縁を規定する円外にある点とを端点とする線分を、前記基準点を中心として回転させて、前記環状領域ごとに、前記線分と重なったピクセルの輝度の平均値を算出する演算手段と、
前記環状領域ごとに算出された輝度の平均値の変化量を算出する算出手段と、
を有する請求項1に記載の生体認証装置。
【請求項4】
前記基準点は、前記虹彩の内側の縁を規定する円の中心に対応する点である請求項3に記載の生体認証装置。
【請求項5】
前記基準点は、前記虹彩の外側の縁を規定する円の中心に対応する点である請求項3に記載の生体認証装置。
【請求項6】
前記基準点は、眼の瞳孔の中心に対応する点である請求項3に記載の生体認証装置。
【請求項7】
前記変化量の極性は、正、負、及び零の三値のうちのいずれかである請求項1乃至6のいずれか一項に記載の生体認証装置。
【請求項8】
虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する工程と、
前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する工程と、
を含む生体認証方法。
【請求項9】
コンピュータを、
虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する手段、
前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する手段、
として機能させるためのプログラム。
【請求項1】
虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する変化量算出手段と、
前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成するコード生成手段と、
を備える生体認証装置。
【請求項2】
前記変化量算出手段は、
前記虹彩のデジタル画像を、複数の環状領域に区分する第1区分手段と、
前記環状領域それぞれを、前記環状領域の内側の縁を規定する円の中心を原点とする極座標に対応した複数の微小領域に区分する第2区分手段と、
前記環状領域ごとに、前記微小領域に含まれるピクセルの輝度の平均値を算出する演算手段と、
前記環状領域ごとに算出された輝度の平均値の変化量を算出する算出手段と、
を有する請求項1に記載の生体認証装置。
【請求項3】
前記変化量算出手段は、
前記虹彩のデジタル画像を、複数の環状領域に区分する第1区分手段と、
前記虹彩の内側の縁を規定する円内の基準点と、前記虹彩の外側の縁を規定する円外にある点とを端点とする線分を、前記基準点を中心として回転させて、前記環状領域ごとに、前記線分と重なったピクセルの輝度の平均値を算出する演算手段と、
前記環状領域ごとに算出された輝度の平均値の変化量を算出する算出手段と、
を有する請求項1に記載の生体認証装置。
【請求項4】
前記基準点は、前記虹彩の内側の縁を規定する円の中心に対応する点である請求項3に記載の生体認証装置。
【請求項5】
前記基準点は、前記虹彩の外側の縁を規定する円の中心に対応する点である請求項3に記載の生体認証装置。
【請求項6】
前記基準点は、眼の瞳孔の中心に対応する点である請求項3に記載の生体認証装置。
【請求項7】
前記変化量の極性は、正、負、及び零の三値のうちのいずれかである請求項1乃至6のいずれか一項に記載の生体認証装置。
【請求項8】
虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する工程と、
前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する工程と、
を含む生体認証方法。
【請求項9】
コンピュータを、
虹彩のデジタル画像に基づいて、前記虹彩のデジタル画像上の位置を示す極座標の座標値に対応した前記虹彩のデジタル画像を構成するピクセルの輝度の、前記極座標に対する変化量を算出する手段、
前記変化量の極性を、前記極座標に準じて配列して、照合対象コードを生成する手段、
として機能させるためのプログラム。
【図1】


【図3】
【図4】
【図5】
【図6】
【図7】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図8】
【図9】
【図3】
【図4】
【図5】
【図6】
【図7】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図8】
【図9】
【公開番号】特開2013−33506(P2013−33506A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2012−241127(P2012−241127)
【出願日】平成24年10月31日(2012.10.31)
【分割の表示】特願2009−12377(P2009−12377)の分割
【原出願日】平成21年1月22日(2009.1.22)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成24年10月31日(2012.10.31)
【分割の表示】特願2009−12377(P2009−12377)の分割
【原出願日】平成21年1月22日(2009.1.22)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]