
生体認証装置及び生体認証装置における利用者の手の位置の調整方法
【課題】利用者が生体情報を含む複数の部位を生体情報を読み取るセンサに対して適切な位置に置くことを支援する生体認証装置を提供する。
【解決手段】生体認証装置(1)は、利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサ(41)と、利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサ(42)と、利用者の指の位置を規制するガイド部材(431a、431b)と、指の生体情報の少なくとも一部が第1のセンサの撮影範囲から外れている場合、ガイド部材と第1の被写体領域から推定される指の生体情報の間の位置関係に基づいて、指の生体情報が第1のセンサの撮影範囲に収まり、かつ手のひらの生体情報が第2のセンサの撮影範囲に収まるための利用者の手の移動方向を求める位置判定部(12)とを有する。
【解決手段】生体認証装置(1)は、利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサ(41)と、利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサ(42)と、利用者の指の位置を規制するガイド部材(431a、431b)と、指の生体情報の少なくとも一部が第1のセンサの撮影範囲から外れている場合、ガイド部材と第1の被写体領域から推定される指の生体情報の間の位置関係に基づいて、指の生体情報が第1のセンサの撮影範囲に収まり、かつ手のひらの生体情報が第2のセンサの撮影範囲に収まるための利用者の手の移動方向を求める位置判定部(12)とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、複数の部位のそれぞれが有する生体情報に基づいて生体認証を行う生体認証装置、及び、生体情報を読み取るセンサに対する生体情報を含む複数の部位の位置を調整する方法に関する。
【背景技術】
【0002】
近年、手または指の静脈のパターン、指紋または掌紋などの生体情報を表した生体画像に基づいて、装置またはシステムの利用者を認証する生体認証技術が開発されている。そのような生体認証技術を利用した生体認証装置は、例えば、生体認証装置を使用しようとする利用者の生体情報を表す生体画像を入力生体画像として取得する。そして生体認証装置は、入力生体画像に表された利用者の入力生体情報を、予め登録された登録利用者の生体画像に表された生体情報である登録生体情報と照合する。生体認証装置は、照合処理の結果に基づいて、入力生体情報と登録生体情報が一致すると判定した場合、その利用者を正当な権限を有する登録利用者として認証する。そして生体認証装置は、認証された利用者が生体認証装置が組み込まれた装置または生体認証装置と接続された他の装置を使用することを許可する。
【0003】
認証精度を高くするためには、入力生体画像上での入力生体情報の向きが予め決められた方向を向き、かつ、入力生体情報全体が入力生体画像に写るように、生体情報を含む部位がセンサに対して適切に配置されることが好ましい。そこで、生体情報を含む部位を適切に配置させるためのガイドを設ける技術が提案されている(例えば、特許文献1及び2を参照)。また、生体情報を含む部位を撮影した画像からその部位の位置または向きを検出して、検出された位置または向きに基づいて生体情報の像を補正することが不適切な場合には、利用者にその旨を通知する技術が提案されている(例えば、特許文献2を参照)。さらに、指先ガイドを備えた指先端部置台と指根元部置台とを有し、指先端部置台が本体の内部壁面に沿って指根元部置台に向けて摺動可能な指静脈パターン入力装置が提案されている(例えば、特許文献3を参照)。この指静脈パターン入力装置は、利用者が指を指先端部置台とともに移動させることによって指が適切な位置に達したときに、指の静脈パターンを撮影する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−268174号公報
【特許文献2】国際公開第2004/21884号
【特許文献3】特開2007−58643号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
また、近年、複数の生体情報を生体認証に利用するマルチモーダル生体認証装置が提案されている。このマルチモーダル生体認証装置では、生体情報を含む複数の部位のそれぞれが、生体情報を読み取るセンサに対して適切な位置に配置されることが好ましい。特に利用者が生体認証装置に不慣れである場合には、利用者に生体情報を含む何れかの部位の位置が不適切であると通知しても、利用者はその部位をどのように移動させれば、全ての部位が適切な位置となるか分からない。そのため、生体情報を再撮影する際に、生体情報を含む部位が適切な位置に配置されないおそれがあった。
【0006】
また、生体情報を含む部位の形状及びサイズには個人差が有るので、全ての利用者に対して適切なガイドをセンサに設けることは困難である。特に、複数の部位それぞれを適切な位置に配置するように、ガイドを設けたり、ガイドの位置を調整することは、撮影対象となる部位が一つである場合よりも難しい。そのため、利用者がセンサに対して複数の部位を適切に配置することを容易にする生体認証装置が望まれている。
【0007】
そこで本明細書は、利用者が生体情報を含む複数の部位を生体情報を読み取るセンサに対して適切な位置に置くことを支援する生体認証装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
一つの実施形態によれば、利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置が提供される。この生体認証装置は、利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサと、利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサと、利用者の指の位置を規制するガイド部材と、第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出する被写体領域検出部と、第1の被写体領域に基づいて指の生体情報の少なくとも一部が第1のセンサの撮影範囲から外れているか否かを判定し、指の生体情報の少なくとも一部が第1のセンサの撮影範囲から外れている場合、ガイド部材と第1の被写体領域から推定される指の生体情報の間の位置関係に基づいて、指の生体情報が第1のセンサの撮影範囲に収まり、かつ手のひらの生体情報が第2のセンサの撮影範囲に収まるための利用者の手の移動方向を求める位置判定部とを有する。
【0009】
本発明の目的及び利点は、請求項において特に指摘されたエレメント及び組み合わせにより実現され、かつ達成される。
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を限定するものではないことを理解されたい。
【発明の効果】
【0010】
本明細書に開示された生体認証装置は、利用者が生体情報を含む複数の部位を生体情報を読み取るセンサに対して適切な位置に置けるように支援できる。
【図面の簡単な説明】
【0011】
【図1】第1または第2の実施形態による、生体認証装置の概略構成図である。
【図2】(a)は、生体情報取得部の概略平面図であり、(b)は、(a)の矢視AA’における概略側面断面図である。
【図3】(a)は、ガイド機構の概略平面図であり、(b)は、(a)における矢印Bの方向から見たガイド機構の概略側面図である。
【図4】指紋センサ及び静脈センサの撮影範囲とガイド部材である二つのピンとの位置関係を示す図である。
【図5】処理部の機能ブロック図である。
【図6】生体認証処理の動作フローチャートである。
【図7】(a)は、第2の実施形態による生体認証装置が有する生体情報取得部の概略平面図であり、(b)は、(a)における矢印Cの方向から見た生体情報取得部の概略側面図である。
【図8】共通座標系で表現された指紋の存在範囲と静脈パターンの存在範囲の一例を示す図である。
【図9】位置調整処理の動作フローチャートである。
【図10】波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の一例を表す図である。
【図11】波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の他の一例を表す図である。
【図12】(a)は、指の先端側から見た、変形例によるガイド部材の概略側面図であり、(b)は、変形例によるガイド部材の概略平面図である。
【図13】各実施形態またはその変形例による生体認証装置が実装された入室管理システムの概略構成図である。
【発明を実施するための形態】
【0012】
以下、図を参照しつつ、様々な実施形態による生体認証装置について説明する。
この生体認証装置は、少なくとも二つのセンサを有する。そしてこの生体認証装置は、一方のセンサで指に含まれる生体情報を読み取って、指の生体情報が写った第1の生体画像を生成し、他方のセンサで手のひらに含まれる生体情報を読み取って、手のひらの生体情報が写った第2の生体画像を生成する。さらに、この生体認証装置は、利用者の手の位置を規制し、各センサに対して指及び手のひらを適切な位置に誘導するためのガイド部材を有する。そしてこの生体認証装置は、第1及び第2の生体画像を解析することでガイド部材と指及び手のひらの位置関係を推定することにより、指及び手のひらの位置が各センサに対して適切となるための指または手のひらの移動方向を推定する。さらにこの生体認証装置は、推定された移動方向に沿って指または手のひらを移動させるためにガイド部材の位置を調整し、または利用者に手の移動方向を指示する。
【0013】
本実施形態では、生体認証の対象となる指の生体情報として指紋を利用し、手のひらの生体情報として静脈パターンを利用する。しかし、指の生体情報も静脈パターンであってもよく、あるいは、手のひらの生体情報は掌紋であってもよい。
また、本明細書において、「照合処理」という用語は、利用者の生体情報と登録利用者の生体情報の類似度合いを表す類似度を算出する処理を示すために使用される。また、「生体認証処理」という用語は、照合処理だけでなく、照合処理の結果を利用して、利用者を認証するか否かを決定する処理を含む、認証処理全体を示すために使用される。
【0014】
図1は、生体認証装置の概略構成図を示す。図1に示されるように、生体認証装置1は、表示部2と、入力部3と、生体情報取得部4と、記憶部5と、処理部6とを有する。表示部2、入力部3及び生体情報取得部4は、記憶部5と処理部6が収容された生体認証装置本体とは別個に設けられてもよい。あるいは、表示部2、入力部3、生体情報取得部4、記憶部5及び処理部6は、一つの筺体に収容されてもよい。
【0015】
生体認証装置1は、生体情報取得部4により利用者の指の指紋を表す第1の生体画像と手のひらの静脈パターンを表す第2の生体画像を生成し、それら生体画像を用いて生体認証処理を実行する。そして生体認証装置1は、生体認証処理の結果、利用者を登録利用者の何れかとして認証した場合、生体認証装置1が実装された装置をその利用者が使用することを許可する。あるいは、生体認証装置1は、図示しない他の装置へ、利用者が認証された旨を表す信号を送信して、その利用者が他の装置を使用することを許可する。
【0016】
表示部2は、例えば、液晶ディスプレイまたはCRTモニタなどの表示装置を有する。そして表示部2は、例えば、照合に用いられる部位(右手または左手)を示すメッセージ、または生体情報取得部4が適正な生体画像を取得可能な位置へ手を配置させるためのガイドメッセージまたは認証結果を利用者に対して表示する。また表示部2は、処理部6により実行されたアプリケーションに関連する各種情報などを表示する。
【0017】
入力部3は、例えば、キーボードを有する。そして入力部3を介して利用者により入力されたコマンド、データ、利用者の識別情報であるユーザ名またはパスワードは、処理部6へ渡される。
【0018】
生体情報取得部4は、利用者の複数の指の指紋を表す第1の生体画像と、利用者の手のひらの静脈パターンを表す第2の生体画像とを生成する。
【0019】
図2(a)は、生体情報取得部4の概略平面図であり、図2(b)は、図2(a)の矢視AA’における概略側面断面図である。
生体情報取得部4は、指紋センサ41と、静脈センサ42とを有する。そして指紋センサ41及び静脈センサ42は、何れも、センサ面が上方を向くように、樹脂または金属で形成された直方体状の筺体40内に配置される。さらに、利用者から見て手前側に静脈センサ42が配置され、奥側に指紋センサ41が配置される。したがって、第1及び第2の生体画像を生成するために、利用者は、手の甲を上に向け、指紋センサ41の上方に指を置き、静脈センサ42の上方に手のひらを置く。
【0020】
指紋センサ41は、例えば、複数の指を同時に撮影可能な、固体撮像素子が2次元状に配置されたエリアセンサ411を有する、光路分離法光学式の指紋センサである。このエリアセンサ411は、生体情報取得部4の上面に配置された、ガラスまたは樹脂で形成された透明な保護カバー44の直下に配置される。なお、保護カバー44の周囲には、樹脂または金属で形成された不透明な上面カバー45が設けられている。また筺体40内には、保護カバー44上に載置された指を下方から照明するための照明光源412を有する。そのような照明光源412は、例えば、可視光波長を有する光を発する発光ダイオードとすることができる。そして指紋センサ41は、例えば、照明光源から発し、指の表面で反射された光を、結像光学系(図示せず)にてエリアセンサ411上に集光することにより、保護カバー44に載置された指の指紋を撮影し、その指紋の像が写った第1の生体画像を生成する。第1の生体画像の各画素の値は、例えば、0〜255の範囲内の値となり、その画素の輝度が明るいほど、その画素値は大きくなる。本実施形態では、第1の生体画像において、隆線は明るく、谷線は暗くなる。すなわち、隆線が写っている画素の値は比較的大きくなり、一方、谷線が写っている画素の値は比較的小さくなる。なお、指紋センサ41は、全反射光学式といった他の光学方式、電界式、感圧式あるいは超音波方式といった、他の原理に基づくセンサであってもよい。他の原理に基づくセンサが用いられる場合、第1の生体画像上で隆線は暗く、谷線は明るくなることもある。
本実施形態では、指紋センサ41は、人差し指、中指及び薬指の指紋を撮影する。
【0021】
一方、静脈センサ42は、例えば、赤外光に感度を有する、Charge Coupled Device といった固体撮像素子が2次元状に配置されたエリアセンサ421を有する。さらに、静脈センサ42は、利用者の手を照明するために赤外光を発する赤外発光ダイオードなどの照明光源422を有する。そしてエリアセンサ421は、利用者の手が触れないように、筺体40の底部に配置される。そして、静脈センサ42の周囲には、筺体40の側壁が形成されており、その側壁の上端に利用者の手のひらの一部を載置可能となっている。なお側壁の上端と、保護カバー44の上面とは略水平となっている。そのため、利用者が、保護カバー44上に指を載置し、かつ側壁の上端に手のひらの一部を載置すると、利用者の指と手のひらとがほぼ水平となる。また、筺体40の上面は、静脈センサ42の上方部分が空洞となるように形成されている。そして、静脈センサ42が有する結像光学系(図示せず)が、その空洞部分に位置する手のひらの静脈パターンの像をエリアセンサ421上に結像する。そしてエリアセンサ421は、静脈パターンが写った第2の生体画像を生成する。第2の生体画像の各画素の値は、例えば、0〜255の範囲内の値となり、その画素の輝度が高いほど、その画素値は大きくなる。本実施形態では、第2の生体画像において、静脈が写っている領域及び手が写っていない部分は黒くなり、静脈がない手の部分が写っている領域は明るくなる。
【0022】
本実施形態では、第1の生体画像及び第2の生体画像の両方とも、生体画像の上端に近いほど指の先端に近い部位が写り、生体画像の下端に近いほど手首に近い部位が写る。
【0023】
また、指紋センサ41と静脈センサ42との間には、ガイド機構43が配置される。
図3(a)は、ガイド機構43の概略平面図であり、図3(b)は、図3(a)における矢印Bの方向から見たガイド機構43の概略側面図である。図2(a)、図2(b)、図3(a)及び図3(b)に示されるように、ガイド機構43は、筺体40の上面カバーから上方に向けて略垂直に突出するように配置された、木材、樹脂または金属からなる棒状の2本のピン431a、431bを有する。ピン431a、431bは、利用者の手の位置を規制するガイド部材の一例である。本実施形態では、標準的なサイズの手を持つ利用者が適切な位置に手を置いた場合に、ピン431aが人差し指と中指の付け根近辺で挟まれ、かつ、ピン431bが中指と薬指の付け根近辺で挟まれるように、ピン431a及び431bは配置される。尚、以上の説明は右手を例にして説明したが、左手の場合はピンと指の対応が右手の場合とは逆になる。以降の実施例の説明では右手を例に説明するが、生体認証装置1は左手でも同様に機能する。
【0024】
さらに、ピン431aの下端及びピン431bの下端は、それぞれ、利用者が適切な位置に手を置いたときに、利用者の手元から指先へ向かう方向(以下、便宜上縦方向と呼ぶ)に対して直交する方向(以下、便宜上横方向と呼ぶ)に沿って、筺体40の上面カバー45に形成された溝432に挿入される。そしてピン431aの下端及びピン431bの下端は、筺体40内に設けられた、平板状のピン保持部材433a、433bにより保持される。さらに、筺体40の上面カバー45の下方には、溝432の長手方向に沿って2本のレール434a及び434bが設けられている。このレール434a、434bは、それぞれ、ピン保持部材433a、433bの奥側の側端近傍に形成された溝及び手元側の側端近傍に形成された溝に対して摺動可能に係合されている。これにより、溝432の長手方向に沿って、ピン保持部材433aとともにピン431aが移動可能となっている。同様に、溝432の長手方向に沿って、ピン保持部材433bとともにピン431bが移動可能となっている。そのため、ピン431aとピン431b間の間隔は、利用者の手のサイズに応じて調節可能である。
【0025】
さらに、筺体40内には、ピン431a及びピン431bを移動させるための二つのステッピングモータ435a、435bと各ステッピングモータの駆動回路(図示せず)が配置されている。このステッピンモータ435a及び435bは、処理部6によって制御される。
ステッピングモータ435aの回転軸436aとステッピングモータ435bの回転軸436bが溝432の長手方向と平行になり、かつ、回転軸436aの先端と回転軸436bの先端が対向するように、ステッピングモータ435a、435bは配置されている。そして回転軸436aにはネジ溝が形成されており、このネジ溝がピン保持部材433aの下部に形成されたネジ溝と係合している。そのため、ステッピングモータ435aの回転角度に応じた移動量だけ、ピン保持部材433a及びピン431aが、溝432の長手方向に沿って移動する。同様に、回転軸436bにはネジ溝が形成されており、このネジ溝がピン保持部材433bの下部に形成されたネジ溝と係合している。そのため、ステッピングモータ435bの回転角度に応じた移動量だけ、ピン保持部材433b及びピン431bが、溝432の長手方向に沿って移動する。
【0026】
図4は、指紋センサ41及び静脈センサ42の撮影範囲とガイド部材であるピン431a、431bとの位置関係を示す図である。利用者は、人差し指と中指の付け根近傍でピン431aを挟み、中指と薬指の付け根近傍でピン431bを挟むように手を置く。これにより、各指の指紋401〜403が指紋センサ41の撮影範囲410に含まれ、手のひらの静脈パターン404が静脈センサ42の撮影範囲420に含まれる。
【0027】
本実施形態では、生体情報取得部4は、入力部3と別個に形成される。しかし、生体情報取得部4は、入力部3と一体的に形成されてもよい。
生体情報取得部4により生成された第1の生体画像及び第2の生体画像は、処理部6へ送られる。
【0028】
記憶部5は、例えば、半導体メモリ、磁気ディスク装置、または光ディスク装置のうちの少なくとも何れか一つを有する。そして記憶部5は、生体認証装置1で使用されるアプリケーションプログラム、少なくとも一人の登録利用者のユーザ名、ユーザ識別番号及び個人設定情報、各種のデータ等を記憶する。また記憶部5は、生体認証処理を実行するためのプログラムを記憶する。
【0029】
さらに記憶部5は、登録利用者それぞれについて、登録利用者の登録生体情報である左右何れかの手のひらの静脈パターンに関する照合用データを記憶する。この照合用データは、例えば、登録利用者の登録時に生成された第2の生体画像から抽出された静脈の端点または分岐点といった特徴的な構造を表す特徴点の位置または種別を含む。あるいは、照合用データは、登録利用者の登録時に生成された第2の生体画像そのもの、あるいはその登録時に生成された第2の生体画像の一部であってもよい。
【0030】
また記憶部5は、登録利用者それぞれについて、登録利用者の登録生体情報である左右何れかの手の人差し指、中指及び薬指の指紋に関する照合用データを記憶する。この照合用データは、例えば、登録利用者の登録時に生成された第1の生体画像から抽出された指紋の端点または分岐点といった特徴的な構造を表す特徴点の位置または種別を含む。あるいは、指紋に関する照合用データは、登録利用者の登録時に生成された第1の生体画像そのもの、あるいはその登録時に生成された第1の生体画像の一部であってもよい。
【0031】
処理部6は、1個または複数個のプロセッサ及びその周辺回路を有する。そして処理部6は、生体情報取得部4から取得した第1及び第2の生体画像を用いた生体認証処理を実行する。また処理部6は、登録利用者の生体情報を登録する登録処理を実行する。
【0032】
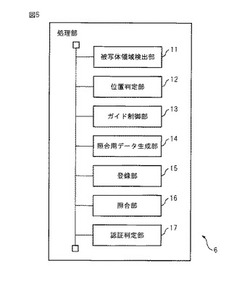
図5は、処理部6の機能ブロック図である。図5に示されるように、処理部6は、被写体領域検出部11と、位置判定部12と、ガイド制御部13と、照合用データ生成部14と、登録部15と、照合部16と、認証判定部17とを有する。処理部6が有するこれらの各部は、処理部6が有するプロセッサ上で実行されるコンピュータプログラムによって実装される機能モジュールである。あるいは、処理部6が有するこれらの各部は、ファームウェアとして生体認証装置1に実装されてもよい。
【0033】
被写体領域検出部11、位置判定部12、ガイド制御部13及び照合用データ生成部14は、生体認証処理の実行時及び登録処理の実行時の両方において使用される。また、登録部15は、登録処理の実行時に使用される。一方、照合部16及び認証判定部17は、生体認証処理の実行時において使用される。
【0034】
被写体領域検出部11は、第1及び第2の生体画像から、それぞれ、被写体である生体情報が写っている領域である被写体領域と、ガイド部材との位置合わせに利用される手の付け根部分を検出する。
【0035】
第1の生体画像に関して、被写体領域検出部11は、例えば、第1の生体画像中で各指の隆線が写っている画素の集合である隆線領域と谷線が写っている画素と利用者の指が写っていない画素の集合である背景領域とを区別する。なお、隆線領域は、被写体領域の一例である。
そのために、被写体領域検出部11は、例えば、第1の2値化閾値以上の画素値を持つ画素が隆線領域に含まれ、第1の2値化閾値未満の画素値を持つ画素が背景領域に含まれるように第1の生体画像を2値化する。第1の2値化閾値は、例えば、予め設定された固定値(例えば、100)、第1の生体画像内の平均画素値、あるいは、第1の生体画像全体またはその一部に含まれる画素値を判別分析することにより決定された閾値に設定される。また2値化された第1の生体画像において、隆線領域に含まれる画素の値は、例えば'1'に設定され、背景領域に含まれる画素の値は、例えば'0'に設定される。
【0036】
また、被写体領域検出部11は、照合精度が低下することを抑制するために、指の第1関節よりも手元側の部分を隆線領域から除くことが好ましい。本実施形態では、第1の生体画像上で、各指は、横方向に並んで写る。そこで被写体領域検出部11は、例えば、第1の生体画像の横方向の各行について、所定の閾値以上の画素値を持つ領域が連続する部分を指が写っている生体領域として検出する。第1の生体画像上で指が写っていない画素の値は非常に小さく、かつ、谷線が写っている画素の値よりも小さい。そこで所定の閾値は、谷線に相当する画素値未満の値、例えば、10に設定される。
【0037】
被写体領域検出部11は、第1の生体画像の上端から順に、隣接する行間で生体領域が連続しているか否かを調べる。そして隣接する行間で生体領域が連続していれば、被写体領域検出部11は、その連続した生体領域を一つの指の生体領域として連結する。
【0038】
あるいは、被写体領域検出部11は、指ごとの生体領域を求めるために、2値化された第1の生体画像における隆線領域に含まれる画素の数を列ごとに集計してもよい。そして被写体領域検出部11は、隆線領域に含まれる画素の数が極小値となる列を、隣接する二つの指の生体領域の境界としてもよい。
【0039】
ここで、第1関節は、第1の生体画像上で、横方向に沿って指の幅に相当する長さを持つ、谷線に相当する画素値かそれよりも暗い画素値を持つ画素が連続する領域となる。また、第1の生体画像の上端に近いほど、指の先端に近い部位が写る。そこで被写体領域検出部11は、第1の生体画像で、各指の生体領域について、その指の生体領域が含まれる最も上側の行を上端とし、その上端から下方向へ順に、生体領域内で所定幅だけ連続して第1の2値化閾値以下の画素値を持つ画素が連続する行を探索する。そして被写体領域検出部11は、最初に検出された行を第1関節位置とする。所定幅は、指ごとに、例えば、その指が写っている生体領域の横方向の幅の平均値に設定される。
被写体領域検出部11は、指ごとに、2値化された第1の生体画像について、検出された第1関節位置よりも下で隆線領域に含まれる画素の値を背景領域に含まれる画素の値に置換する。
さらに、被写体領域検出部11は、隆線領域を、例えば、指ごとの生体領域の境界で、それぞれの指ごとに区分することで、指ごとの隆線領域を求める。そして被写体領域検出部11は、各指の隆線領域に、対応する指を表す識別番号を付す。
【0040】
被写体領域検出部11は、記憶部5に、2値化された第1の生体画像と、隣接する指の境界の位置と、各指の識別番号を一時記憶する。
【0041】
また、第2の生体画像に関して、被写体領域検出部11は、例えば、第2の生体画像中で手のひらが写っている画素の集合である生体領域と何も写っていない画素の集合である背景領域とを区別する。本実施形態では、背景領域に含まれる画素の値は、生体領域に含まれる画素の値よりも低い。そこで被写体領域検出部11は、例えば、所定の閾値以上の画素値を持つ画素を検出し、検出された画素の集合を生体領域とする。所定の閾値は、例えば、10に設定される。
【0042】
さらに、被写体領域検出部11は、生体領域について、静脈が写っている画素の集合である静脈領域と静脈が写っていない画素の集合である非静脈領域とを区別する。なお、静脈領域は、被写体領域の一例である。本実施形態では、静脈が写っている画素の値は、静脈が写っていない画素の値よりも低い。そこで、被写体領域検出部11は、生体領域内で、例えば、第2の2値化閾値以下の画素値を持つ画素の集合を静脈領域とし、第2の2値化閾値より大きい画素値を持つ画素の集合を非静脈領域とする。第2の2値化閾値は、例えば、予め設定された固定値(例えば、150)、生体領域内の各画素の平均画素値、あるいは、生体領域に含まれる画素値を判別分析することにより決定された閾値に設定される。
被写体領域検出部11は、第2の生体画像を、静脈領域に含まれる画素と非静脈領域または背景領域に含まれる画素とに2値化する。例えば、静脈領域に含まれる画素の値は、例えば'1'に設定され、非静脈領域または背景領域に含まれる画素の値は、例えば'0'に設定される。
【0043】
利用者の指の置き方によっては、第2の生体画像に指の静脈も写ることがある。しかし、手のひらの静脈に対する指の静脈の相対的な位置は、指の開き角などによって変わる。そのため、指の静脈を照合処理に用いると、照合精度が低下するおそれがある。そこで被写体領域検出部11は、2値化された第2の生体画像に基づいて、指の付け根部分を検出し、その付け根部分よりも上側の静脈領域に含まれる画素の値を非静脈領域または背景領域に含まれる画素の値に置換することが好ましい。
【0044】
上記のように、第2の生体画像においても、上端に近いほど、指の先端に近い部位が写る。そのため、指の付け根は、第2の生体画像における上端近傍に写っている可能性がある。そこで被写体領域検出部11は、2値化された第2の生体画像の上端近傍の所定数の行において、指の間隔に相当する所定幅以上、非静脈領域または背景領域に含まれる画素値を持つ画素が連続し、かつ静脈領域で挟まれた区間を持つ行を指の付け根部分が写っている行として検出する。また被写体領域検出部11は、非静脈領域または背景領域に含まれる画素値を持つ画素が連続する区間のそれぞれについて、その区間の横方向の中心位置を求め、その中心位置を指の付け根の横方向の位置とする。そして被写体領域検出部11は、指の付け根の横方向の位置を、第2の生体画像と関連付けて記憶部5に記憶する。なお、所定の行数は、指紋が第1の生体画像に写り、かつ手のひらの静脈パターンが第2の生体画像に写るように手を配置可能な縦方向の位置ずれ量の許容幅に相当する行数、例えば、20行に設定される。被写体領域検出部11は、2値化された第2の生体画像において、指の付け根部分が写っている行のうちで最も下の行よりも上の各行に含まれる静脈領域内の画素の値を、非静脈領域または背景領域に含まれる画素の値に置換する。
被写体領域検出部11は、記憶部5に2値化された第2の生体画像を一時記憶する。
【0045】
本実施形態では、図4に示されるように、標準的なサイズの手を持つ利用者がピン431aを人差し指と中指の付け根近辺で挟み、かつ、ピン431bを中指と薬指の付け根近辺で挟むように、手を配置すると、手は適切な位置に配置される。しかし、第1の生体画像及び第2の生体画像の取得時において、ピン431a及び431bを指で挟むように配置しない場合、第1の生体画像上に指紋が写らなかったり、あるいは第2の生体画像上に静脈パターンが写らないことがある。特に、指が保護カバー44と接していなければ、第1の生体画像に指紋が写らない。
【0046】
また、手のサイズには個人差があるので、ピン431aとピン431b間の間隔が利用者の指の付け根間の間隔と一致しないことがある。このような場合、利用者は、指の付け根の近傍部分で各ピンを挟めず、適切な位置よりも手元側に手を置く可能性がある。この場合には、例えば、第2の生体画像上に指の付け根部分が写る。
さらに、利用者の手のサイズによっては、第1の生体画像に指紋が写り、かつ、第2の生体画像に手のひら全体が写るように、利用者が手を配置できないことがある。このような場合には、第1の生体画像上で指紋の一部が欠けていたり、あるいは第2の生体画像上で手のひらの静脈パターンの一部が欠けることになる。
このように、指紋が写っていなかったり、指紋の一部または静脈パターンの一部が写っていない生体画像が照合処理に用いられると、照合精度が低下するおそれがある。
【0047】
そこで、位置判定部12は、隆線領域及び静脈領域に基づいて、第1の生体画像に利用者の指の指紋全体が写り、かつ、第2の生体画像に利用者の手のひらの静脈パターン全体が写る適切な位置に利用者の手が置かれているか否かを判定する。そして位置判定部12は、指紋の一部または静脈パターンの一部が対応するセンサの撮影範囲から外れていると判定した場合、ガイド部材と指紋と静脈パターンの位置関係に基づいて、利用者の手を適切に配置するための利用者の手の移動方向を求める。
【0048】
位置判定部12は、第1の生体画像に指紋が写っているか否かを判定するために、2値化された第1の生体画像において指ごとの隆線領域に含まれる画素の総数を求める。そして位置判定部12は、各指について、その総数が所定の閾値未満であれば、第1の生体画像にその指の指紋が写っていないと判定し、一方、その総数が所定の閾値以上であれば、第1の生体画像にその指の指紋が写っていると判定する。なお、所定の閾値は、例えば、一つの指の隆線領域に含まれる標準的な画素数の1/10に設定される。また、本実施形態では、指紋センサ41は、人差し指と、中指と、薬指の指紋を撮影するので、これら3本の指の指紋が第1の生体画像に写っていれば、隣接する指の境界の数は2となる。そこで検出された隣接する指の境界の数が1以下であれば、位置判定部12は、何れかの指の指紋が写っていないと判定する。
【0049】
位置判定部12は、2値化された第1の生体画像において上下左右の何れかの画像端の画素列に、隆線領域に含まれる画素が所定数以上存在するか否か判定する。何れかの画素列に隆線領域に含まれる画素が所定数以上存在する場合、すなわち、何れかの指の隆線領域が画像端に接している場合、位置判定部12は、何れかの指の指紋が指紋センサ41の撮影範囲からはみ出していると判定する。すなわち、位置判定部12は、利用者の手の位置は適切でないと判定する。
【0050】
また、位置判定部12は、2値化された第2の生体画像において、上下左右の何れかの画像端の画素列に、静脈領域に含まれる画素が所定数以上存在するか否か判定する。何れかの画素列に静脈領域に含まれる画素が所定数以上存在する場合、手のひらの静脈パターンが第2の生体画像の画像端に接している。この場合、位置判定部12は、手のひらの静脈パターンの一部が静脈センサ42の撮影範囲からはみ出していると判定する。すなわち、位置判定部12は、利用者の手の位置は適切でないと判定する。なお所定数は、1以上の正の値、例えば、1〜5に設定される。
【0051】
一方、第1の生体画像において各指の指紋が検出され、かつ、画像端と隆線領域が接しておらず、かつ、第2の生体画像の画像端と静脈領域が接していなければ、位置判定部12は、利用者の手の位置は適切であると判定する。
【0052】
位置判定部12は、第1の生体画像に指紋が写っていないと判定した場合、表示部2に、指を保護カバー43に載せることを指示するガイドメッセージを表示させる。
【0053】
また、位置判定部12が指紋センサ41の撮影範囲の左端または右端から何れかの指の指紋がはみ出していると判定した場合、ピン431aとピン431b間の間隔が利用者の指の付け根間の間隔と一致していない可能性がある。そこで位置判定部12は、例えば、ピン431aの中心とピン431bの中心との間隔と、隣接する指の付け根の横方向の位置間の間隔との差を求める。そして位置判定部12は、その差が0になる方向を二つのピンの移動方向とする。また位置判定部12は、その差の1/2を、それぞれのピンの移動量とする。そして位置判定部12は、各ピンの移動方向及び移動量をガイド制御部13に通知する。これにより、利用者は、指の付け根付近で二つのピンを挟むことが可能となる。なお、第1及び第2の生体画像を最初に撮影する際の二つのピン431a、431b間の初期間隔は、例えば、殆どの利用者が指でピンを挟めるように十分広く設定されることが好ましい。例えば、初期間隔は、既に登録されている登録利用者について得られた第2の生体画像から求められた、指の付け根における隣接する二つの空隙の中点間の間隔の分布の上位1%に相当する間隔に設定される。
【0054】
また、位置判定部12は、手のひらの静脈パターンの手首側(すなわち、第2の生体画像における下端側)が静脈センサ42の撮影範囲から外れている場合、被写体領域検出部11により、第2の生体画像上で指の付け根が検出されているか否か判定する。そして第2の生体画像上で指の付け根が検出されていれば、位置判定部12は、表示部2に、指の付け根付近で二つのピンを挟むよう、縦方向に手を移動させることを指示するガイドメッセージを表示させる。
さらに、位置判定部12は、第2の生体画像の対向する2辺と静脈像が接している場合、利用者の手のひらが静脈センサ42の撮影範囲に収まらないと判定し、そのことを示す範囲外れフラグを設定する。
【0055】
ガイド制御部13は、利用者の手が適切な位置となるように、位置判定部12から通知された移動方向に沿って通知された移動量だけガイド部材を移動させるよう、生体情報取得部4のガイド機構43を制御する。
そのために、ガイド制御部13は、通知された移動方向及び移動量に相当する回転角だけステッピングモータ435a、435bを回転させる命令を、ステッピングモータ435a、435bの駆動回路へ送信する。
【0056】
処理部6は、ガイド制御部13がピン431a、431bの位置を移動させてから、あるいは手を移動させるガイドメッセージを表示部2に表示させてから所定時間(例えば、1秒〜3秒)経過した後、生体情報取得部4に指紋及び静脈パターンを再撮影させる。そして得られた第1の生体画像及び第2の生体画像を生体情報取得部4から受け取る。
【0057】
照合用データ生成部14は、第1及び第2の生体画像から、照合処理で用いられる照合用データを生成する。例えば、生体認証装置1がマニューシャマッチングにより照合処理を行う場合、照合用データ生成部14は、そのマニューシャマッチングで用いられる特徴点(マニューシャと呼ばれる)を第1及び第2の生体画像から抽出し、その特徴点の位置またはその特徴点の種類を照合用データとする。
【0058】
指紋が写っている第1の生体画像に関して、照合用データ生成部14は、マニューシャマッチングで用いられる特徴点として、例えば、第1の生体画像から、隆線の分岐点及び端点を抽出する。そのために、照合用データ生成部14は、2値化された第1の生体画像上で隆線に相当する画素値を持つ画素の集合に対して細線化処理を行って、隆線が細線化された細線化2値画像を生成する。そして照合用データ生成部14は、隆線の分岐点または端点の何れかに対応する複数のテンプレートを用いて細線化2値画像を走査することにより、何れかのテンプレートと一致するときの細線化2値画像上の位置を検出する。そして照合用データ生成部14は、検出された位置の中心画素を、マニューシャとして抽出する。なお、テンプレートは、例えば、3×3画素で表され、隆線の分岐点または端点に対応する2値パターンを持つ。さらに、照合用データ生成部14は、指紋の渦中心または三角州といった特異点をマニューシャとして抽出してもよい。なお、照合用データ生成部14は、例えば、隆線の分岐点または端点を検知するのと同様に、特異点に対応するテンプレートと生体画像とのパターンマッチングを行うことにより特異点を検出できる。
【0059】
照合用データ生成部14は、抽出された各マニューシャがどの指の隆線領域に含まれるかを、例えば、隣接する指の境界の位置とマニューシャの位置を比較することにより判定する。そして照合用データ生成部14は、各マニューシャに、そのマニューシャが含まれる隆線領域に対応する指の識別番号を関連付ける。
なお、照合用データ生成部14は、特定の一つ以上の指、例えば、人差し指に対応する隆線領域についてのみ、マニューシャを抽出してもよい。
【0060】
手のひらの静脈パターンが写っている第2の生体画像に関して、照合用データ生成部14は、2値化された第2の生体画像から、静脈の分岐点及び端点を抽出する。そのために、照合用データ生成部14は、例えば、2値化された第2の生体画像上で静脈に相当する画素値を持つ画素の集合に対して細線化処理を行って、静脈が細線化された細線化2値画像を生成する。そして照合用データ生成部14は、静脈の分岐点または端点の何れかに対応する複数のテンプレートを用いて細線化2値画像を走査することにより、何れかのテンプレートと一致するときの細線化2値画像上の位置を検出する。そして照合用データ生成部14は、検出された位置の中心画素を、マニューシャとして抽出する。
【0061】
なお照合用データ生成部14は、隆線の端点、分岐点または特異点をマニューシャとして求める公知の他の方法を用いて、第1の生体画像からマニューシャを抽出してもよい。同様に、静脈の端点及び分岐点をマニューシャとして求める公知の他の方法を用いて、第2の生体画像からマニューシャを抽出してもよい。また、照合用データ生成部14は、第1及び第2の生体画像上で指紋または静脈パターンの特徴を表す他の特徴量を照合用データとして求めてもよい。例えば、照合用データ生成部14は、各指の隆線領域を複数のブロックに分割し、ブロックごとの隆線方向を照合用データとして求めてもよい。また、照合用データ生成部14は、静脈領域を複数のブロックに分割し、ブロックごとの静脈本数を照合用データとして求めてもよい。
【0062】
また、生体認証装置1がパターンマッチングにより照合処理を行う場合、照合用データ生成部14は、第1の生体画像そのもの、あるいは第1の生体画像から一部の領域を切り出して、照合用データとしてもよい。第1の生体画像の一部を照合用データとする場合、その一部の領域は、第1の生体画像に写っている各指の指紋を含むことが好ましい。そこで、照合用データ生成部14は、例えば、各指の隆線領域の外接矩形で囲まれた領域を第1の生体画像からトリミングして、そのトリミングされた領域を照合用データとしてもよい。
同様に、照合用データ生成部14は、第2の画像そのもの、あるいは第2の生体画像上の静脈領域を含む一部の領域を第2の生体画像から切り出して、照合用データとしてもよい。さらに照合用データ生成部14は、各生体画像全体または各生体画像の一部に対して、エッジ強調処理またはムラ補正処理などを行って得られた画像を照合用データとしてもよい。
【0063】
登録部15は、入力部2から得た登録利用者の識別情報と、第1及び第2の生体画像からそれぞれ作成された照合用データとを関連付けて記憶部5に記憶する。また登録部15は、第2の生体画像に関して範囲外れフラグが設定されている場合、その範囲外れフラグも登録利用者の識別情報と関連付けて記憶部5に記憶する。
【0064】
照合部16は、利用者の照合用データと、入力部2を介して入力された識別情報と一致する識別情報を持つ登録利用者の照合用データとを用いて、利用者の各指の指紋及び静脈パターンと登録利用者の各指の指紋及び静脈パターンとを照合する。そして照合部16は、照合処理の結果として、利用者の指紋及び静脈パターンが登録利用者の指紋及び静脈パターンに類似している度合いを表す類似度を求める。
【0065】
照合部16は、照合処理として、例えば、マニューシャマッチング、あるいはパターンマッチングを用いることができる。
【0066】
照合部16は、指紋の照合に関して、例えば、予め設定された何れかの指の指紋についての照合用データ、または第1の生体画像に写っている全ての指の指紋についての照合用データを用いて、照合処理を実行する。
【0067】
照合部16は、マニューシャマッチングを用いる場合、注目する指についての登録利用者の照合用データに含まれるマニューシャと、利用者の照合用データに含まれるマニューシャとの間で一致するマニューシャの個数を求める。そして照合部16は、その一致する個数を利用者の注目する指について抽出されたマニューシャの個数で割ることにより、注目する指についての利用者の指紋と登録利用者の指紋との類似度を算出できる。
あるいは、照合部16は、パターンマッチングを用いる場合、注目する指領域同士の相対的な位置を変えつつ正規化相互相関値を算出する。そして照合部16は、その正規化相互相関値の最大値を、注目する指についての利用者の指紋と登録利用者の指紋との類似度とする。
【0068】
なお、照合部16は、複数の指の照合用データを用いて照合処理を実行する場合、照合部16は、第1の生体画像に写っているそれぞれの指について類似度を算出する。そして照合部16は、算出された類似度の平均値または最大値を利用者の指紋と登録利用者の指紋間の類似度とする。
【0069】
静脈パターンの照合に関しても、照合部16は、指紋に関する類似度を算出する処理と同様の処理を行うことで、登録利用者の静脈パターンと利用者の静脈パターン間の類似度を算出できる。例えば、照合部16は、マニューシャマッチングを用いる場合、静脈パターンについての登録利用者の照合用データに含まれるマニューシャと、利用者の照合用データに含まれるマニューシャとの間で一致するマニューシャの個数を求める。そして照合部16は、その一致する個数を利用者の静脈パターンについて抽出されたマニューシャの個数で割ることにより、利用者の静脈パターンと登録利用者の静脈パターンとの類似度を算出できる。
あるいは、照合部16は、パターンマッチングを用いる場合、利用者の第2の生体画像と登録利用者の第2の生体画像間の相対的な位置を変えつつ、正規化相互相関値を算出する。そして照合部16は、その正規化相互相関値の最大値を、利用者の静脈パターンと登録利用者の静脈パターンとの類似度とする。
【0070】
照合部16は、指紋の類似度と静脈パターンの類似度とを、登録利用者の識別情報とともに、それぞれ認証判定部17へ渡す。
【0071】
なお、利用者の識別情報が入力されていない場合、照合部16は、各登録利用者について、それぞれ指紋の類似度と静脈パターンの類似度を求める。そして照合部16は、指紋の類似度と静脈パターンの類似度の合計が最大となる登録利用者を選択する。
そして照合部16は、類似度の合計の最大値に対応する指紋の類似度及び静脈パターンの類似度と、その最大値に対応する登録利用者の識別情報を認証判定部17へ渡す。
【0072】
認証判定部17は、指紋の類似度と静脈パターンの類似度の合計が認証判定閾値以上となる場合、利用者の指紋及び静脈パターンと登録利用者の指紋及び静脈パターンは一致すると判定する。そして認証判定部17は、利用者を、その登録利用者として認証する。認証判定部17は、利用者を認証すると、その認証結果を処理部6へ通知する。
【0073】
一方、認証判定部17は、類似度の合計が認証判定閾値未満となる場合、利用者の指紋及び静脈パターンと登録利用者の指紋及び静脈パターンは一致しないと判定する。この場合には、認証判定部17は、利用者を認証しない。認証判定部17は、利用者の認証に失敗したことを示す認証結果を処理部6へ通知する。そして処理部6は、表示部2に、認証結果を表す認証結果情報を送信してもよい。
【0074】
認証判定閾値は、何れかの登録利用者本人が利用者である場合にのみ、認証判定部17が認証に成功するような値に設定されることが好ましい。そして認証判定閾値は、登録利用者とは異なる他人が利用者である場合には、認証判定部17が認証に失敗するような値に設定されることが好ましい。例えば、認証判定閾値は、指紋についての類似度と静脈パターンの類似度の合計が取りうる最大値と最小値の差に0.7を乗じた値を、類似度の合計の最小値に加えた値とすることができる。
【0075】
また、利用者または登録利用者に範囲外れフラグが設定されている場合、認証判定部17は、利用者の指紋と登録利用者の指紋間の類似度が個別認証判定閾値以上となる場合、利用者の指紋と登録利用者の指紋は一致すると判定する。そして認証判定部17は、利用者を、その登録利用者として認証してもよい。なお、個別認証判定閾値は、例えば、指紋の類似度が取り得る最大値と最小値の差に0.7を乗じた値を、指紋の類似度の最小値に加えた値とすることができる。
あるいは、認証判定部17は、利用者の指紋と登録利用者の指紋間の類似度が個別認証判定閾値以上となり、かつ、入力されたパスワードが登録利用者のパスワードと一致している場合に限り、利用者を、その登録利用者として認証してもよい。
【0076】
図6は、処理部6により実行される生体認証処理の動作フローチャートである。
処理部6が生体情報取得部4から第1及び第2の生体画像を受け取ると、処理部6の被写体領域検出部11は、第1の生体画像上で隆線が写っている隆線領域を検出する。また被写体領域検出部11は、第2の生体画像上で静脈パターンが写っている静脈領域を検出する(ステップS101)。次に、処理部6の位置判定部12は、隆線領域及び静脈領域に基づいて各指の指紋及び静脈パターンが、それぞれ、指紋センサ41及び静脈センサ42の撮影範囲に収まっているか否か判定する(ステップS102)。何れかの指の指紋が指紋センサ41の撮影範囲から外れているか、または静脈パターンが静脈センサ42の撮影範囲から外れている場合(ステップS102−No)、処理部6のガイド制御部13は、利用者の手の位置が適切となるようにガイド部材の位置を調節する。または、処理部6は、利用者が手を適切な位置に置くためのガイドメッセージを表示部2に表示させる(ステップS103)。そして処理部6は、生体情報所得部4に再度、利用者の指及び手のひらを撮影させて、第1及び第2の生体画像を再取得する(ステップS104)。その後、処理部6は、ステップS101以降の手順を再度実行する。
【0077】
一方、各指の指紋及び静脈パターンが、それぞれ、指紋センサ41及び静脈センサ42の撮影範囲に収まっている場合(ステップS102−Yes)、利用者の手の位置は適切である。そこで処理部6の照合用データ生成部14は、第1及び第2の生体画像から、それぞれ照合用データを生成する(ステップS105)。そして処理部6は、その照合用データを照合部16に渡す。さらに処理部6は、入力部2を介して利用者の識別情報を取得している場合、その識別情報と一致する識別情報と関連付けられた登録利用者の照合用データを記憶部5から読み出して、その照合用データを照合部16に渡す。一方、利用者の識別情報が入力されていない場合、処理部6は、全ての登録利用者の照合用データを記憶部5から読み出して、各照合用データ及び対応する登録利用者の識別情報を照合部16へ渡す。
【0078】
照合部16は、利用者の指紋についての照合用データと登録利用者の指紋についての照合用データとに基づいて利用者の指紋と登録利用者の指紋の類似度を算出する。また照合部16は、利用者の静脈パターンについての照合用データと登録利用者の静脈パターンについての照合用データとに基づいて利用者の静脈パターンと登録利用者の静脈パターンの類似度を算出する(ステップS106)。そして照合部16は、指紋の類似度及び静脈パターンの類似度とともに、登録利用者の識別情報を認証判定部17へ渡す。なお、利用者の識別番号が得られていない場合には、照合部16は、各登録利用者について求めた利用者の指紋に対する類似度及び利用者の静脈パターンに対する類似度の合計の最大値を求める。そして照合部16は、その最大値とともに、その最大値に対応する登録利用者の識別情報を認証判定部17へ渡す。
【0079】
認証判定部17は、類似度の合計が認証判定用閾値以上となるか否か判定する(ステップS107)。
類似度の合計が認証判定用閾値以上である場合(ステップS107−Yes)、認証判定部17は、利用者を登録利用者として認証する(ステップS108)。
一方、類似度の合計が認証判定用閾値未満である場合(ステップS107−No)、認証判定部17は利用者を認証しない(ステップS109)。
ステップS108またはS109の後、生体認証装置1は、生体認証処理を終了する。
なお、生体認証装置1が登録処理を行う場合、上記のステップS106〜S109の手順の代わりに、登録部15が、利用者の識別情報とともに照合用データを記憶部5に記憶する手順を実行すればよい。
【0080】
以上に説明してきたように、この実施形態による生体認証装置は、二つの生体画像のうちの少なくとも一方に写っている被写体領域から、利用者の手の位置が指紋及び手のひらの静脈パターンを撮影するのに適切か否かを判定する。そしてこの生体認証装置は、利用者の手の位置が適切でない場合、ガイド部材と画像上の被写体領域から求められる指紋または静脈パターン間の位置関係に基づいて、利用者の手の位置が適切となるように手の移動方向を求める。また、この生体認証装置は、ガイド部材の位置を修正することにより利用者の手の位置が適切となる場合、自動的にガイド部材の位置を修正するように、ガイド機構を制御する。そのため、利用者が生体認証装置に不慣れでも、この生体認証装置は、利用者の手を適切な位置に配置し、適切な位置に配置された手を撮影できる。したがって、この生体認証装置は、指の指紋と手のひらの静脈パターンの両方について照合に適した画像を得ることができる。
【0081】
次に、第2の実施形態による、生体認証装置について説明する。第2の実施形態による生体認証装置は、第1の実施形態による生体認証装置と比較して、ガイド機構が有するガイド部材の形状が異なる点、及び第1の生体画像上の隆線領域から指紋の存在範囲を推定し、推定された存在範囲をガイド部材の位置の調節に利用する点で異なる。
そこで以下では、第2の実施形態による生体認証装置の各構成要素のうち、第1の実施形態による生体認証装置の構成要素と相違する点について説明する。第2の実施形態による生体認証装置のその他の構成要素の詳細については、第1の実施形態による生体認証装置の対応する構成要素についての説明を参照されたい。
【0082】
図7(a)は、第2の実施形態による生体認証装置が有する生体情報取得部4の概略平面図であり、図7(b)は、図7(a)における矢印Cの方向から見た生体情報取得部4の概略側面図である。なお、図7(a)及び図7(b)において、生体情報取得部4の各部には、図3(a)及び図3(b)に示された生体情報取得部4の対応する構成要素の参照番号と同じ参照番号を付した。
【0083】
第2の実施形態においても、指紋センサ41と静脈センサ42との間にガイド機構43が配置される。ただし、この実施形態では、ガイド機構43は、ガイド部材として、上面カバー45上に突出するように配置され、木材、樹脂または金属からなる波型ガイド481a、481bを有する。波形ガイド481a、481bの横方向の断面は、上側に凸な略三角形形状となり、かつ波形ガイド481a及び481bの縦方向のサイズは、その波形ガイドの横方向のサイズよりも大きい。指紋及び静脈パターンを撮影する際、利用者は、波形ガイド481aを人差し指と中指で挟み、波形ガイド481bを中指と薬指で挟むように手を置く。波形ガイド481a及び481bは、縦方向にある程度の長さを有し、その結果として利用者の指と波形ガイドとが接触する面積が、第1の実施形態における二つのピンと利用者の指とが接触する面積よりも大きい。そのため、波形ガイド481a及び481bは、第1の実施形態における二つのピンよりも良好に利用者の手を固定できる。
【0084】
なお、波形ガイド481aの下端及び481bの下端には、それぞれ、棒状の突出部が形成されており、この突出部が筺体40の上面カバー45に形成された溝432に挿入される。そして波形ガイド481a及び481bの突出部は、それぞれ、筺体40内に設けられた、保持部材433a、433bにより保持される。この保持部材433a及び433bは、それぞれ、第1の実施形態と同様に、筺体40内に設けられたステッピングモータ435a、435bにより駆動されて、溝432に沿って横方向に移動可能に保持されている。そのため、波形ガイド481aと481b間の間隔は、利用者の手のサイズに応じて調節可能である。なお、保持部材433a及び433bの構造及び保持部材433a、433bを移動可能に保持するための構造の詳細については、図3(a)及び図3(b)を参照されたい。
【0085】
この実施形態でも、生体情報取得部4は、指の先端側に配置された指紋センサ41により、利用者の複数の指の指紋を撮影した第1の生体画像と、手元側に配置された静脈センサ42により、利用者の手のひらの静脈パターンを撮影した第2の生体画像を生成する。そして生体情報取得部4は、第1の生体画像及び第2の生体画像を処理部6へ送信する。
【0086】
第2の実施形態による生体認証装置の処理部6も、第1の実施形態による生体認証装置の処理部と同様に、被写体領域検出部11と、位置判定部12と、ガイド制御部13と、照合用データ生成部14と、登録部15と、照合部16と、認証判定部17とを有する。このうち、被写体領域検出部11、照合用データ生成部14、登録部15、照合部16及び認証判定部17は、第1の実施形態による生体認証装置の対応する構成要素と同じ機能を有する。そこで以下では、位置判定部12及びガイド制御部13について説明する。
【0087】
位置判定部12は、指紋の一部が指紋センサ41の撮影範囲から外れているか否か、及び手のひらの静脈パターンの一部が静脈センサ42の撮影範囲から外れているか否かを判定する。位置判定部12は、第1の実施形態と同様に、第1の生体画像の上下左右の何れかの画像端に隆線領域に含まれる画素が所定数以上存在する場合、指紋の一部が指紋センサ41の撮影範囲から外れていると判定する。また位置判定部12は、第2の生体画像の上下左右の何れかの画像端に静脈領域に含まれる画素が所定数以上存在する場合、静脈パターンの一部が静脈センサ42の撮影範囲から外れていると判定する。なお、静脈パターンの一部が静脈センサ42の撮影範囲から外れているか否かを判定する前に、被写体領域検出部11は、指の部分の静脈が写っている画素を静脈領域から除くことが好ましい。
【0088】
位置判定部12は、何れかの指の指紋の一部が指紋センサ41の撮影範囲から外れている場合、第1の生体画像の画像平面における、その指紋の存在範囲を推定する。そのために、位置判定部12は、2値化された第1の生体画像において画像端に接した指の隆線領域を、指紋に外接する図形で近似する。本実施形態では、指紋に外接する図形は、楕円形とする。
【0089】
位置判定部12は、例えば、任意の楕円形を規定する5個のパラメータ(中心の横方向座標cx及び縦方向座標cy、長軸半径rx、短軸半径ry及び長軸方向p)を様々に変更しつつ、指紋センサ41の撮影範囲から一部が外れた指の指紋の隆線領域が全て含まれる楕円形を求める。そして位置判定部12は、そのような楕円のうちで、面積が最小となる楕円を、その指紋の存在範囲として推定する。
【0090】
同様に、位置判定部12は、手のひらの静脈パターンの一部が静脈センサ42の撮影範囲から外れている場合、静脈パターンの存在範囲を静脈パターンに外接する図形で近似することで、第2の生体画像の画像平面における静脈パターンの存在範囲を推定する。例えば、静脈パターンに外接する図形は、楕円形とする。そして位置判定部12は、静脈領域が全て含まれる楕円形のうち、面積が最小となる楕円を、静脈パターンの存在範囲として推定する。
【0091】
なお、第1の生体画像の画像端と接していない隆線領域に対応する指の指紋については、隆線領域そのものを指紋の存在範囲とする。また、手のひらの静脈パターン全体が第2の生体画像に写っている場合には、静脈領域そのものを静脈パターンの存在範囲とする。
【0092】
なお、指紋に外接する図形及び静脈パターンに外接する図形は楕円に限られない。指紋に外接する図形及び静脈パターンに外接する図形は、例えば、複数の登録利用者の指紋の外径形状を平均化した図形及び静脈パターンの外径形状を平均化した図形としてもよい。
【0093】
位置判定部12は、利用者の手の位置が適切となるような手及び波形ガイドの移動方向と移動量を求めるために、指紋の存在範囲及び静脈パターンの存在範囲を、波形ガイドと各センサの位置関係に基づいて仮想的に移動させる。そして位置判定部12は、移動後の指紋の存在範囲が指紋センサ41の撮影範囲に収まり、かつ、移動後の静脈パターンの存在範囲が静脈センサ42の撮影範囲に収まるか否か判定する。そこで、位置判定部12は、第1の生体画像上の指紋と第2の生体画像上の静脈パターンとを、実空間での位置関係を表す共通座標系で扱えるように、各生体画像上の座標を、実空間での各センサの撮影範囲の位置関係及び各センサの解像度に基づいて、共通座標系に変換する。共通座標系では、横方向及び縦方向の単位長は、例えば、1mmに設定される。
【0094】
図8は、共通座標系で表現された指紋の存在範囲と静脈パターンの存在範囲の一例を示す図である。共通座標系800では、実空間での縦方向がy軸、横方向がx軸で表される。そして第2の生体画像の下端、すなわち、静脈センサ42の撮影範囲のうちの手元側の境界のy軸座標が0であり、指の先端に近いほどy軸の座標値が大きくなるように設定されている。したがって、静脈センサ42の撮影範囲810よりも、指紋センサ41の撮影範囲820の方が上側に位置する。また、共通座標系800では、静脈パターンの存在範囲が楕円811で表され、人差し指、中指、薬指のそれぞれの指紋の存在範囲が楕円821〜823で表されている。そしてこの例では、人差し指の存在範囲821及び薬指の存在範囲823の一部が指紋センサ41の撮影範囲820から外れている。
【0095】
図9は、第2の実施形態による位置調整処理の動作フローチャートである。なお、この位置調整処理は、図6に示された第1の実施形態による生体認証処理のステップS102〜S104の手順の代わりに実行される。
処理部6の位置判定部12は、照合対象となる全ての指が第1の生体画像に写っているか否か判定する(ステップS201)。位置判定部12が第1の実施形態と同様に、隆線領域に基づいて第1の生体画像に写っている指の数を求め、その指の数が照合対象となる指の数と等しければ、照合対象となる全ての指が写っていると判定する。
何れかの指の指紋が写っていない場合(ステップS201−No)、位置判定部12は、表示部2に、保護カバー上に指を置くことを指示するガイドメッセージを表示させる(ステップS202)。一方、照合対象となる全ての指の指紋が写っている場合(ステップS201−Yes)、位置判定部12は、何れかの指の指紋の一部または静脈パターンの一部がセンサの撮影範囲から外れているか否か判定する(ステップS203)。何れの指の指紋もセンサの撮影範囲内に収まっており、かつ静脈パターンもセンサの撮影範囲内に収まっている場合(ステップS203−Yes)、位置判定部12は、手の位置は適切であると判定する。そして位置判定部12は、位置調整処理を終了する。
一方、何れかの指の指紋の一部、または静脈パターンの一部がセンサの撮影範囲から外れている場合(ステップS203−No)、位置判定部12は、各指の指紋の存在範囲及び手のひらの静脈パターンの存在範囲を推定する(ステップS204)。そして位置判定部12は、各指の指紋及び静脈パターンの存在範囲を仮想的な手の移動に応じて修正することにより、手の移動によって手が適切な位置となるか否か判定する(ステップS205)。
【0096】
手の移動によって手が適切な位置となる場合(ステップS205−Yes)、位置判定部12は、手の移動方向及び移動量を指示するガイドメッセージを表示部2に表示させる(ステップS206)。
一方、手を移動させても手が適切な位置とならない場合(ステップS205−No)、位置判定部12は、波形ガイドの移動によって手が適切な位置となるか否か判定する(ステップS207)。
【0097】
波形ガイドの移動によって手が適切な位置となる場合(ステップS207−Yes)、位置判定部12は、波形ガイドの移動方向及び移動量をガイド制御部13へ通知し、ガイド制御部13に波形ガイドを移動させる(ステップS208)。
一方、波形ガイドを移動させても手が適切な位置とならない場合(ステップS207−No)、位置判定部12は、波形ガイド及び手の移動によって手が適切な位置となるか否か判定する(ステップS209)。波形ガイド及び手の移動によって手が適切な位置となる場合(ステップS209−Yes)、位置判定部12は、波形ガイドの移動方向及び移動量をガイド制御部13へ通知し、ガイド制御部13に波形ガイドを移動させる。さらに位置判定部12は、手の移動方向及び移動量を指示するガイドメッセージを表示部2に表示させる(ステップS210)。
一方、波形ガイド及び手を移動させても手が適切な位置とならない場合(ステップS209−No)、位置判定部12は、範囲はずれフラグを設定する(ステップS211)。その後、位置判定部12は、位置調整処理を終了する。
また、ステップS202、S206、S208またはS210の後、処理部6は、生体情報取得部4に指紋及び静脈パターンを再撮影させ、その再撮影により生成された第1及び第2の生体画像を生体情報取得部4から取得する(S212)。その後、処理部6は、ステップS201以降の手順を再度実行する。
【0098】
本実施形態における波形ガイドは、指の長手方向がその波形ガイドに沿った方向に向くように固定することができる。そのため、利用者が波形ガイドに沿って手を動かす場合、指を動かせる方向は限られる。
【0099】
図10は、波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の一例を表す図である。点線で表された楕円1001〜1004は、それぞれ、人差し指、中指及び薬指の指紋の存在範囲と静脈パターンの存在範囲を表す。また点1011〜1013は、それぞれ、波形ガイド481aの中点と波形ガイド481bの中点を結んだ線と指の中心線との交点である。指は、波形ガイド481a、481bに沿った方向にしか移動できないので、利用者が手を動かしても、常にこの交点1011〜1013は指と重なる。そこでこの交点を、以下では、便宜上固定点と呼ぶ。また、手の構造上、指は、指の付け根1021〜1023を回転軸として回転する。したがって、例えば、指の付け根の間隔よりも、波形ガイドの間隔の方が広ければ、利用者が手元側へ手を移動させると、各指の指紋の存在範囲間のx軸方向の間隔が狭くなる。その結果、各指の指紋の存在範囲は、例えば、それぞれ、実線で表された楕円1031〜1033となる。また、静脈パターンの存在範囲は下方へ移動し、実線で表された楕円1034となる。このように、利用者の手を仮想的に所定方向に所定距離だけ移動させた場合の、指紋の仮想的な存在範囲は、指の付け根に相当する回転軸の位置と波形ガイドの位置によって推定される。以下では、利用者の手を仮想的に移動させた場合の、指紋の仮想的な存在範囲を、便宜上、仮想指紋範囲と呼ぶ。同様に、利用者の手を仮想的に移動させた場合の、静脈パターンの仮想的な存在範囲を、便宜上、仮想静脈範囲と呼ぶ。
【0100】
本実施形態では、二つの波形ガイドは縦方向に沿って平行に配置されているので、利用者の手の移動方向は縦方向に限定される。そこで位置判定部12は、手を仮想的に縦方向に所定距離だけ移動させたときの各指の仮想指紋範囲を以下のように推定する。
位置判定部12は、各指の回転軸の位置を縦方向に所定の微小距離(例えば、1mm)移動させる。なお各指の回転軸は、指紋の存在範囲の重心と固定点とを通る直線が静脈パターンの存在範囲の上側の境界と交差する点とすることができる。そして位置判定部12は、指毎に、移動後の回転軸の位置を始点として、固定点を通り、かつ、手を仮想的に移動させる前の回転軸から指紋の存在範囲の重心までの線分と同一の長さを持つ線分の終点を、移動後の指紋の存在範囲の重心とする。また位置判定部12は、移動前の回転軸と固定点を通る線分に対して、移動後の回転軸と固定点を通る線分がなす角だけ、元の指紋の存在範囲に対して仮想指紋範囲を回転させる。
なお、手を仮想的に縦方向に所定距離だけ移動させることにより、静脈パターンの存在範囲も、縦方向にその所定距離だけ移動する。
【0101】
位置判定部12は、仮想指紋範囲が指紋センサ41の撮影範囲に収まるか否か判定する。そのために、位置判定部12は、仮想指紋範囲を表す楕円と指紋センサ41の撮影範囲の左右端または上下端を表す線とが交差するか否か判定する。本実施形態では、共通座標系において指紋センサ41の撮影範囲の左右端はy軸と平行になっており、指紋センサ41の撮影範囲の上下端はx軸と平行になっている。そこで位置判定部12は、仮想指紋範囲の左右端のx軸座標が指紋センサ41の撮影範囲の左右端のx軸座標の間に位置し、かつ、仮想指紋範囲の上下端のy軸座標が撮影範囲の上下端のy軸座標の間に位置すれば、仮想指紋範囲は撮影範囲に含まれていると判定する。なお、各センサの筐体に対する取り付け誤差により、指紋センサ41の撮影範囲の端部が、共通座標系のx軸またはy軸と平行でないことがある。そこで位置判定部12は、指紋センサ41の撮影範囲の上下端及び左右端を表す直線の方程式と注目する指の仮想指紋範囲を表す楕円の方程式との交点を求める。この場合、交点がなければ、位置判定部12は、注目する指の仮想指紋範囲は指紋センサ41の撮影範囲に含まれていると判定する。
【0102】
なお、撮影範囲の何れかの画像端を表す直線の方程式は、例えば以下の式で表される。
【数1】

ここで(x0,y0)は、画像端を表す直線が通る点の座標であり、dは、その直線がx軸となす角度である。また、仮想指紋範囲を表す楕円の方程式は、例えば、以下の式で表される。
【数2】
ここで、(cx,cy)は、楕円の中心の座標であり、rx及びryは、それぞれ、長軸半径及び短軸半径である。そしてpは、長軸方向を表す。この場合、次式で算出される判定値Dが0以上であれば、画像端を表す直線と仮想指紋範囲を表す楕円との交点が存在し、判定値Dが負であれば、画像端を表す直線と仮想指紋範囲を表す楕円との交点は存在しない。
【数3】
【0103】
位置判定部12は、静脈パターンの仮想存在範囲の上端または下端が静脈センサ42の撮影範囲の上端または下端と接するまで、所定の微小距離ずつ手を縦方向に仮想的に移動させる。そして手をその微小距離だけ移動させる度に、位置判定部12は、各指の仮想指紋範囲が指紋センサ41の撮影範囲に収まるか否か判定する。そして位置判定部12は、各指の仮想指紋範囲が指紋センサ41の撮影範囲に収まれば、手を移動するだけで手を適切な位置に置けると判定する。そして位置判定部12は、手を仮想的に移動させた距離の合計だけ、利用者の手を縦方向に移動させることを指示するガイドメッセージを表示部2に表示させる。
【0104】
なお、静脈パターンの一部が静脈センサ42の撮影範囲の下端から外れており、各指の指紋全体が指紋センサ41の撮影範囲に収まっている場合には、位置判定部12は、仮想静脈範囲が静脈センサ42の撮影範囲に収まる距離だけ仮想的に手を上方に移動させる。そして位置判定部12は、上記と同様に各指の仮想指紋範囲を求め、その仮想指紋範囲が指紋センサ41の撮影範囲に収まっていれば、利用者の手を移動するだけで手を適切に配置できると判定する。この場合、位置判定部12は、手を仮想的に移動させた距離だけ、利用者の手を上方向(すなわち、指の先端側)へ移動させることを指示するガイドメッセージを表示部2に表示させる。
【0105】
一方、静脈パターンの仮想存在範囲の上端または下端が静脈センサの撮影範囲の上端または下端と接しても、何れかの指の仮想指紋範囲が指紋センサの撮影範囲に収まらない場合、位置判定部12は、手を移動させても手が適切な位置とならないと判定する。この場合、上記のように、位置判定部12は、波形ガイドを移動させることで利用者の手が適切な位置となるか否かを判定する。
【0106】
次に、波形ガイドを移動させることで利用者の手が適切な位置となるか否かの判定の詳細について説明する。
【0107】
図11は、波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の他の一例を表す図である。楕円1101〜1104は、それぞれ、人差し指、中指及び薬指の指紋の存在範囲と静脈パターンの存在範囲を表す。また点1111〜1113は、それぞれ、波形ガイド481aの中点と波形ガイド481bの中点を結んだ線と指の中心線との交点である固定点である。また、点1121〜1123は、それぞれ、人差し指、中指、薬指の回転軸である。
【0108】
波形ガイド481a及び481bとの間隔を狭めるように、波形ガイド481a及び481bが移動したとする。これに伴い、固定点1111が点1131まで移動し、固定点1113が点1133まで移動するように、利用者の手が仮想的に移動したとする。この場合には、回転軸1121〜1123は移動しないので、回転軸を中心とする円弧に沿って各指の指紋の存在範囲も移動し、その結果、人差し指の仮想指紋範囲は楕円1141となり、薬指の仮想指紋範囲は楕円1143となる。このように、何れかの指の指紋の存在範囲が指紋センサの撮影範囲から外れていても、波形ガイドを移動させることで、各指の指紋の存在範囲の間隔が狭くなり、各指の指紋の存在範囲が指紋センサの撮影範囲に収まることがある。
【0109】
本実施形態では、波形ガイドは横方向、すなわち、指の幅方向にのみ移動可能となっている。そこで位置判定部12は、波形ガイドを仮想的に横方向に所定距離だけ移動させたときの各指の仮想指紋範囲を以下のように推定する。
位置判定部12は、各指の固定点の位置を、波形ガイドの移動に合わせて横方向に所定の微小距離(例えば、1mm)移動させる。例えば、波形ガイド481aと波形ガイド481b間の間隔がその微小距離だけ狭くなるように波形ガイド481aと481bが移動する場合には、人差し指の固定点と薬指の固定点間の間隔も所その微小距離だけ狭くなる。そして位置判定部12は、指ごとに、移動後の回転軸の位置を始点として、固定点を通り、かつ、手を仮想的に移動させる前の回転軸から指紋の存在範囲の重心までの線分と同一の長さを持つ線分の終点を、移動後の指紋の存在範囲の重心とする。
なお、この場合には、静脈パターンの存在範囲の位置は変更しない。
【0110】
位置判定部12は、各波形ガイドが移動可能な範囲で、所定の微小距離ずつ各波形ガイドを横方向に仮想的に移動させる。そして波形ガイドをその微小距離だけ移動させる度に、位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まるか否か判定する。なお、位置判定部12は、二つの波形ガイド間の間隔が狭くなるように、各波形ガイドを仮想的に移動させてもよく、あるいは、二つの波形ガイドを同一の方向へ仮想的に移動させてもよい。そして位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まれば、波形ガイドを移動するだけで手を適切な位置に置けると判定する。そして位置判定部12は、波形ガイドを仮想的に移動させた距離の合計及び波形ガイドの移動方向をガイド制御部13へ通知する。
【0111】
一方、各波形ガイドが移動可能な範囲で波形ガイドの位置を変えても、何れかの指の仮想指紋範囲が指紋センサの撮影範囲に収まらない場合、位置判定部12は、波形ガイドを移動させても手が適切な位置とならないと判定する。そこで、上記のように、位置判定部12は、利用者の手と波形ガイドの両方を移動させることで利用者の手が適切な位置となるか否かを判定する。
【0112】
この場合、位置判定部12は、利用者の手を仮想的に所定の微小距離だけ縦方向に移動させることに対応して、各指の回転軸を縦方向にその微小距離だけ移動させる。一方、位置判定部12は、各波形ガイドを仮想的に所定の微小距離だけ横方向に移動させることに対応して、各指の固定点を横方向にその微小距離だけ移動させる。そして位置判定部12は、指ごとに、移動後の回転軸の位置を始点として、移動後の固定点を通り、かつ、手を仮想的に移動させる前の回転軸から指紋の存在範囲の重心までの線分と同一の長さを持つ線分の終点を、移動後の指紋の存在範囲の重心とする。
【0113】
位置判定部12は、静脈パターンの仮想存在範囲の上端または下端が静脈センサの撮影範囲の上端または下端と接するまで、所定の微小距離ずつ手を縦方向に仮想的に移動させる。また位置判定部12は、各波形ガイドが移動可能な範囲で、所定の微小距離ずつ各波形ガイドを横方向に仮想的に移動させる。そして手または波形ガイドをその微小距離だけ移動させる度に、位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まるか否か判定する。そして位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まれば、波形ガイドと手の両方を移動することで手を適切な位置に置けると判定する。そして位置判定部12は、手を仮想的に移動させた距離の合計だけ、利用者の手を縦方向に移動させることを指示するガイドメッセージを表示部2に表示させる。また位置判定部12は、波形ガイドを仮想的に移動させた距離の合計及び波形ガイドの移動方向をガイド制御部13へ通知する。
【0114】
一方、静脈パターンの仮想存在範囲の上端または下端が静脈センサの撮影範囲の上端または下端と接するか、波形ガイドをどのように移動させても、何れかの指の仮想指紋範囲が指紋センサの撮影範囲に収まらないことがある。例えば、利用者の手が大きいことにより、何れかの指の指紋が指紋センサ41の撮影範囲の上端よりも上側に位置し、かつ、手のひらの静脈パターンの下端が静脈センサ42の撮影範囲の下端よりも下側に位置することがある。このような場合、位置判定部12は、利用者の手を適切に配置することができないと判定する。そして、位置判定部12は、範囲外れフラグを設定する。
【0115】
この第2の実施形態によれば、生体認証装置は、波形ガイド、各センサの撮影範囲及び指紋及び静脈の存在範囲の位置関係に基づいて、利用者の手または波形ガイドを仮想的に移動させたときの指紋及び静脈の存在範囲を推定する。そのため、この生体認証装置は、利用者の何れかの指の指紋の一部が生体画像に写っていない場合に、波形ガイドまたは利用者の手を移動することで手を適切な位置に配置できるか否かをより正確に判定できる。
【0116】
なお、変形例によれば、ガイド機構は、ガイド部材として、上記の波形ガイドの代わりに、指の腹の部分に沿うように横方向の断面が上方に凹状となるように形成された二つのガイドを有してもよい。
図12(a)は、指の先端側から見た、この変形例によるガイド部材の概略側面図であり、図12(b)は、この変形例によるガイド部材の概略平面図である。二つのガイド部材1201、1202の一方には人差し指を載せ、他方には薬指を載せるように、二つのガイド部材1201、1202は横方向に並べて配置される。この場合、ガイド部材1201、1202は、人差し指と薬指を固定できるので、ガイド部材1201、1202が移動することによって人差し指と薬指もガイド部材の移動量と同じ移動量だけ移動する。そのため、生体認証装置は、ガイド部材の位置を調節することによって利用者の手を適切な位置とする場合に、確実に利用者の手を適切な位置に配置できる。
【0117】
さらに他の変形例によれば、生体情報取得部のガイド機構は、ガイド部材を自動的に移動させるためのステッピングモータを有さなくてもよい。この場合には、利用者の手の移動に応じてガイド部材も移動する。また位置判定部は、ガイド部材を所定距離だけ移動することによって利用者の手を適切に配置できると判定した場合、そのガイド部材の移動方向及びその所定距離を表示部を介して利用者に通知する。
【0118】
さらに他の変形例によれば、生体情報取得部のガイド部材は、指の先端側に配置され、かつ、縦方向に沿って移動可能に保持されていてもよい。この変形例によれば、利用者は、指の先端をガイド部材に接するように手を置く。この場合も、位置判定部は、第1の生体画像から検出された隆線領域及び第2の生体画像から検出された静脈領域に基づいて、手の位置が適切か否か判定する。そして位置判定部は、手の位置が適切でない場合、ガイド部材と隆線領域及び静脈領域の位置間系に基づいて、手を適切に配置するための手の移動方向及びガイド部材の移動方向を求める。
【0119】
また他の変形例によれば、一つのイメージセンサによって指の生体情報と手のひらの生体情報を撮影してもよい。この場合には、例えば、指の先端側に位置するイメージセンサの撮影範囲の半分の領域が指の生体情報の撮影範囲となり、イメージセンサの撮影範囲の他の領域が手のひらの生体情報の撮影範囲となる。
【0120】
上記の各実施形態またはその変形例による生体認証装置は、コンピュータシステム及び入室管理システムといった、様々な用途に利用できる。
【0121】
図13は、上記の各実施形態またはその変形例による生体認証装置が実装された入室管理システムの概略構成図である。入室管理システム100は、ドア制御装置110と認証サーバ120とを有する。ドア制御装置110と認証サーバ120とは、通信ネットワーク130を介して接続される。ドア制御装置110は、所定の区画の入口(例えば、オフィスルームまたは建物の入口)に設置されたドア(図示せず)の開閉を制御する装置である。ドア制御装置110は、生体情報取得部111と、制御部112と、ドア駆動部113と、表示部114と、通信部115とを有する。
【0122】
生体情報取得部111は、上記の各実施形態またはその変形例による生体認証装置の生体情報取得部とすることができる。そして生体情報取得部111は、指紋を撮影した第1の生体画像と手のひらの静脈パターンを撮影した第2の生体画像を制御部112へ送る。
【0123】
制御部112は、一つまたは複数のプロセッサと、揮発性または不揮発性の半導体メモリと、周辺回路とを有する。そして制御部112は、上記の各実施形態またはその変形例による生体認証装置の処理部が有する被写体領域検出部、位置判定部、ガイド制御部及び照合用データ生成部を有する。制御部112が有するこれらの各部は、制御部112が有するプロセッサ上で実行されるプログラムにより実現される機能モジュールである。そして制御部112は、被写体領域検出部により各生体画像から隆線領域及び静脈領域を検出する。そして制御部112は、位置判定部により、隆線領域及び静脈領域に基づいて、利用者の手の位置が適切か否か判定する。そして制御部112は、利用者の手の位置が適切でなければ、表示部114に手の位置の修正を指示するガイドメッセージを表示させ、あるいはガイド制御部を介して生体情報取得部111が有するガイド部材の位置を調整する。
また制御部112は、利用者の手の位置が適切であれば、照合用データ生成部により、第1及び第2の生体画像から照合用データを生成する。そして制御部112は、照合用データを通信部115を介して認証サーバ120へ送信する。
【0124】
さらに制御部112は、認証サーバ120から、利用者が認証されたことを通知されると、ドア駆動部113にドアを開ける指示を通知する。また、制御部112は、認証サーバ120から、利用者が認証されなかったことを通知されると、表示部114に認証に失敗した旨のメッセージを表示させる。
【0125】
ドア駆動部113は、制御部112からの制御信号に応じて、ドアを開けるための駆動信号またはドアを閉じるためのを駆動信号を生成する回路である。そしてドア駆動部113は、その駆動信号をドアへ送ることにより、ドアを開閉させる。
【0126】
表示部114は、例えば、液晶ディスプレイを有する。そして表示部114は、制御部112から受け取ったメッセージを表示する。
通信部115は、ドア制御装置110と認証サーバ120とを通信可能に接続するインターフェース回路を有する。そして通信部115は、制御部111から受け取った照合用データを認証サーバ120へ送信する。また通信部115は、認証サーバ120から利用者が認証されたか否かを表す信号を受け取り、その信号を制御部111へ渡す。
【0127】
認証サーバ120は、ドア制御装置110から受け取った照合用データと、記憶部122に記憶されている登録利用者の照合用データとに基づいて生体認証処理を行い、利用者を認証するか否か判定する。
そのために、認証サーバ120は、通信部121と、記憶部122と、処理部123とを有する。
【0128】
通信部121は、認証サーバ120とドア制御装置110とを通信可能に接続するインターフェース回路を有する。そして通信部121は、ドア制御装置110から受け取った照合用データを処理部123へ渡す。また通信部121は、処理部123から利用者が認証されたか否かを表す信号を受け取り、その信号をドア制御装置110へ送信する。
【0129】
記憶部122は、半導体メモリ、磁気記録装置及び光記録装置のうちの少なくとも一つを有する。そして記憶部122は、一人以上の登録利用者の識別情報ととももに、その登録利用者の照合用データを記憶する。また記憶部122は、処理部123で実行されるプログラム及びそのプログラムで利用される各種のデータを記憶する。
【0130】
処理部123は、少なくとも一つのプロセッサと、揮発性または不揮発性の半導体メモリと、周辺回路とを有する。そして処理部123は、上記の各実施形態またはその変形例による生体認証装置の処理部が有する照合部、認証判定部及び登録部を有する。処理部123が有するこれらの各部は、処理部123が有するプロセッサ上で実行されるプログラムにより実現される機能モジュールである。
【0131】
処理部123は、照合部により、利用者の照合用データと登録利用者の照合用データに基づいて、利用者の指紋及び静脈パターンと登録利用者の指紋及び静脈パターンとの類似度を求める。そして処理部123は、認証判定部により、類似度に基づいて、利用者を認証するか否か判定し、その認証結果を表す信号を通信部121を介してドア制御装置110へ送信する。
【0132】
ここに挙げられた全ての例及び特定の用語は、読者が、本発明及び当該技術の促進に対する本発明者により寄与された概念を理解することを助ける、教示的な目的において意図されたものであり、本発明の優位性及び劣等性を示すことに関する、本明細書の如何なる例の構成、そのような特定の挙げられた例及び条件に限定しないように解釈されるべきものである。本発明の実施形態は詳細に説明されているが、本発明の精神及び範囲から外れることなく、様々な変更、置換及び修正をこれに加えることが可能であることを理解されたい。
以上説明した実施形態及びその変形例に関し、更に以下の付記を開示する。
(付記1)
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置であって、
前記利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサと、
前記利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサと、
前記利用者の指の位置を規制するガイド部材と、
前記第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出する被写体領域検出部と、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める位置判定部と、
を有する生体認証装置。
(付記2)
前記被写体領域検出部は、前記第2の生体画像上で手のひらの生体情報が写っている第2の被写体領域を検出し、
前記位置判定部は、前記第2の被写体領域に基づいて前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れているか否かを判定し、前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れている場合、前記ガイド部材の位置と前記第1の被写体領域から推定される前記指の生体情報の位置と前記第2の被写体領域から推定される前記手のひらの生体情報の位置間の関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、付記1に記載の生体認証装置。
(付記3)
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記第1の被写体領域から指の生体情報に外接する形状で近似することにより前記指の生体情報が存在する範囲を推定し、前記利用者の手を前記ガイド部材にて規制される方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、かつ、前記第2の被写体領域を前記ガイド部材にて規制される方向に沿って仮想的に前記所定距離だけ移動させても前記第2の被写体領域が前記第2のセンサの撮影範囲に収まる場合、前記ガイド部材により規制される方向を前記利用者の手の移動方向として表示部を介して前記利用者に提示する、付記2に記載の生体認証装置。
(付記4)
前記ガイド部材は、前記第1のセンサの撮影範囲と前記第2のセンサの撮影範囲の間に配置される、付記2または3に記載の生体認証装置。
(付記5)
前記ガイド部材は、前記利用者の一本の指を挟むように配置された第1の部材と第2の部材を有する、付記4に記載の生体認証装置。
(付記6)
前記ガイド部材は、前記利用者の指の幅方向に沿って移動可能であり、
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、前記ガイド部材の移動方向を前記利用者の手の移動方向とする、付記4または5に記載の生体認証装置。
(付記7)
前記位置判定部によって前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときに、前記指の生体情報が前記第1のセンサの撮影範囲内に収まると判定された場合に、前記指の幅方向に沿って前記所定距離だけ前記ガイド部材を移動させるガイド制御部をさらに有する、付記6に記載の生体認証装置。
(付記8)
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置における利用者の手の位置を調整する方法であって、
第1のセンサにより生成された、前記利用者の指の生体情報が写った第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出し、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記利用者の指の位置を規制するガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、
ことを含む手の位置の調整方法。
【符号の説明】
【0133】
1 生体認証装置
2 表示部
3 入力部
4 生体情報取得部
5 記憶部
6 処理部
11 被写体領域検出部
12 位置判定部
13 ガイド制御部
14 照合用データ生成部
15 登録部
16 照合部
17 認証判定部
100 入室管理システム
110 ドア制御装置
120 認証サーバ
130 通信ネットワーク
111 生体情報取得部
112 制御部
113 ドア駆動部
114 表示部
115 通信部
121 通信部
122 記憶部
123 処理部
【技術分野】
【0001】
本発明は、例えば、複数の部位のそれぞれが有する生体情報に基づいて生体認証を行う生体認証装置、及び、生体情報を読み取るセンサに対する生体情報を含む複数の部位の位置を調整する方法に関する。
【背景技術】
【0002】
近年、手または指の静脈のパターン、指紋または掌紋などの生体情報を表した生体画像に基づいて、装置またはシステムの利用者を認証する生体認証技術が開発されている。そのような生体認証技術を利用した生体認証装置は、例えば、生体認証装置を使用しようとする利用者の生体情報を表す生体画像を入力生体画像として取得する。そして生体認証装置は、入力生体画像に表された利用者の入力生体情報を、予め登録された登録利用者の生体画像に表された生体情報である登録生体情報と照合する。生体認証装置は、照合処理の結果に基づいて、入力生体情報と登録生体情報が一致すると判定した場合、その利用者を正当な権限を有する登録利用者として認証する。そして生体認証装置は、認証された利用者が生体認証装置が組み込まれた装置または生体認証装置と接続された他の装置を使用することを許可する。
【0003】
認証精度を高くするためには、入力生体画像上での入力生体情報の向きが予め決められた方向を向き、かつ、入力生体情報全体が入力生体画像に写るように、生体情報を含む部位がセンサに対して適切に配置されることが好ましい。そこで、生体情報を含む部位を適切に配置させるためのガイドを設ける技術が提案されている(例えば、特許文献1及び2を参照)。また、生体情報を含む部位を撮影した画像からその部位の位置または向きを検出して、検出された位置または向きに基づいて生体情報の像を補正することが不適切な場合には、利用者にその旨を通知する技術が提案されている(例えば、特許文献2を参照)。さらに、指先ガイドを備えた指先端部置台と指根元部置台とを有し、指先端部置台が本体の内部壁面に沿って指根元部置台に向けて摺動可能な指静脈パターン入力装置が提案されている(例えば、特許文献3を参照)。この指静脈パターン入力装置は、利用者が指を指先端部置台とともに移動させることによって指が適切な位置に達したときに、指の静脈パターンを撮影する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−268174号公報
【特許文献2】国際公開第2004/21884号
【特許文献3】特開2007−58643号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
また、近年、複数の生体情報を生体認証に利用するマルチモーダル生体認証装置が提案されている。このマルチモーダル生体認証装置では、生体情報を含む複数の部位のそれぞれが、生体情報を読み取るセンサに対して適切な位置に配置されることが好ましい。特に利用者が生体認証装置に不慣れである場合には、利用者に生体情報を含む何れかの部位の位置が不適切であると通知しても、利用者はその部位をどのように移動させれば、全ての部位が適切な位置となるか分からない。そのため、生体情報を再撮影する際に、生体情報を含む部位が適切な位置に配置されないおそれがあった。
【0006】
また、生体情報を含む部位の形状及びサイズには個人差が有るので、全ての利用者に対して適切なガイドをセンサに設けることは困難である。特に、複数の部位それぞれを適切な位置に配置するように、ガイドを設けたり、ガイドの位置を調整することは、撮影対象となる部位が一つである場合よりも難しい。そのため、利用者がセンサに対して複数の部位を適切に配置することを容易にする生体認証装置が望まれている。
【0007】
そこで本明細書は、利用者が生体情報を含む複数の部位を生体情報を読み取るセンサに対して適切な位置に置くことを支援する生体認証装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
一つの実施形態によれば、利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置が提供される。この生体認証装置は、利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサと、利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサと、利用者の指の位置を規制するガイド部材と、第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出する被写体領域検出部と、第1の被写体領域に基づいて指の生体情報の少なくとも一部が第1のセンサの撮影範囲から外れているか否かを判定し、指の生体情報の少なくとも一部が第1のセンサの撮影範囲から外れている場合、ガイド部材と第1の被写体領域から推定される指の生体情報の間の位置関係に基づいて、指の生体情報が第1のセンサの撮影範囲に収まり、かつ手のひらの生体情報が第2のセンサの撮影範囲に収まるための利用者の手の移動方向を求める位置判定部とを有する。
【0009】
本発明の目的及び利点は、請求項において特に指摘されたエレメント及び組み合わせにより実現され、かつ達成される。
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を限定するものではないことを理解されたい。
【発明の効果】
【0010】
本明細書に開示された生体認証装置は、利用者が生体情報を含む複数の部位を生体情報を読み取るセンサに対して適切な位置に置けるように支援できる。
【図面の簡単な説明】
【0011】
【図1】第1または第2の実施形態による、生体認証装置の概略構成図である。
【図2】(a)は、生体情報取得部の概略平面図であり、(b)は、(a)の矢視AA’における概略側面断面図である。
【図3】(a)は、ガイド機構の概略平面図であり、(b)は、(a)における矢印Bの方向から見たガイド機構の概略側面図である。
【図4】指紋センサ及び静脈センサの撮影範囲とガイド部材である二つのピンとの位置関係を示す図である。
【図5】処理部の機能ブロック図である。
【図6】生体認証処理の動作フローチャートである。
【図7】(a)は、第2の実施形態による生体認証装置が有する生体情報取得部の概略平面図であり、(b)は、(a)における矢印Cの方向から見た生体情報取得部の概略側面図である。
【図8】共通座標系で表現された指紋の存在範囲と静脈パターンの存在範囲の一例を示す図である。
【図9】位置調整処理の動作フローチャートである。
【図10】波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の一例を表す図である。
【図11】波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の他の一例を表す図である。
【図12】(a)は、指の先端側から見た、変形例によるガイド部材の概略側面図であり、(b)は、変形例によるガイド部材の概略平面図である。
【図13】各実施形態またはその変形例による生体認証装置が実装された入室管理システムの概略構成図である。
【発明を実施するための形態】
【0012】
以下、図を参照しつつ、様々な実施形態による生体認証装置について説明する。
この生体認証装置は、少なくとも二つのセンサを有する。そしてこの生体認証装置は、一方のセンサで指に含まれる生体情報を読み取って、指の生体情報が写った第1の生体画像を生成し、他方のセンサで手のひらに含まれる生体情報を読み取って、手のひらの生体情報が写った第2の生体画像を生成する。さらに、この生体認証装置は、利用者の手の位置を規制し、各センサに対して指及び手のひらを適切な位置に誘導するためのガイド部材を有する。そしてこの生体認証装置は、第1及び第2の生体画像を解析することでガイド部材と指及び手のひらの位置関係を推定することにより、指及び手のひらの位置が各センサに対して適切となるための指または手のひらの移動方向を推定する。さらにこの生体認証装置は、推定された移動方向に沿って指または手のひらを移動させるためにガイド部材の位置を調整し、または利用者に手の移動方向を指示する。
【0013】
本実施形態では、生体認証の対象となる指の生体情報として指紋を利用し、手のひらの生体情報として静脈パターンを利用する。しかし、指の生体情報も静脈パターンであってもよく、あるいは、手のひらの生体情報は掌紋であってもよい。
また、本明細書において、「照合処理」という用語は、利用者の生体情報と登録利用者の生体情報の類似度合いを表す類似度を算出する処理を示すために使用される。また、「生体認証処理」という用語は、照合処理だけでなく、照合処理の結果を利用して、利用者を認証するか否かを決定する処理を含む、認証処理全体を示すために使用される。
【0014】
図1は、生体認証装置の概略構成図を示す。図1に示されるように、生体認証装置1は、表示部2と、入力部3と、生体情報取得部4と、記憶部5と、処理部6とを有する。表示部2、入力部3及び生体情報取得部4は、記憶部5と処理部6が収容された生体認証装置本体とは別個に設けられてもよい。あるいは、表示部2、入力部3、生体情報取得部4、記憶部5及び処理部6は、一つの筺体に収容されてもよい。
【0015】
生体認証装置1は、生体情報取得部4により利用者の指の指紋を表す第1の生体画像と手のひらの静脈パターンを表す第2の生体画像を生成し、それら生体画像を用いて生体認証処理を実行する。そして生体認証装置1は、生体認証処理の結果、利用者を登録利用者の何れかとして認証した場合、生体認証装置1が実装された装置をその利用者が使用することを許可する。あるいは、生体認証装置1は、図示しない他の装置へ、利用者が認証された旨を表す信号を送信して、その利用者が他の装置を使用することを許可する。
【0016】
表示部2は、例えば、液晶ディスプレイまたはCRTモニタなどの表示装置を有する。そして表示部2は、例えば、照合に用いられる部位(右手または左手)を示すメッセージ、または生体情報取得部4が適正な生体画像を取得可能な位置へ手を配置させるためのガイドメッセージまたは認証結果を利用者に対して表示する。また表示部2は、処理部6により実行されたアプリケーションに関連する各種情報などを表示する。
【0017】
入力部3は、例えば、キーボードを有する。そして入力部3を介して利用者により入力されたコマンド、データ、利用者の識別情報であるユーザ名またはパスワードは、処理部6へ渡される。
【0018】
生体情報取得部4は、利用者の複数の指の指紋を表す第1の生体画像と、利用者の手のひらの静脈パターンを表す第2の生体画像とを生成する。
【0019】
図2(a)は、生体情報取得部4の概略平面図であり、図2(b)は、図2(a)の矢視AA’における概略側面断面図である。
生体情報取得部4は、指紋センサ41と、静脈センサ42とを有する。そして指紋センサ41及び静脈センサ42は、何れも、センサ面が上方を向くように、樹脂または金属で形成された直方体状の筺体40内に配置される。さらに、利用者から見て手前側に静脈センサ42が配置され、奥側に指紋センサ41が配置される。したがって、第1及び第2の生体画像を生成するために、利用者は、手の甲を上に向け、指紋センサ41の上方に指を置き、静脈センサ42の上方に手のひらを置く。
【0020】
指紋センサ41は、例えば、複数の指を同時に撮影可能な、固体撮像素子が2次元状に配置されたエリアセンサ411を有する、光路分離法光学式の指紋センサである。このエリアセンサ411は、生体情報取得部4の上面に配置された、ガラスまたは樹脂で形成された透明な保護カバー44の直下に配置される。なお、保護カバー44の周囲には、樹脂または金属で形成された不透明な上面カバー45が設けられている。また筺体40内には、保護カバー44上に載置された指を下方から照明するための照明光源412を有する。そのような照明光源412は、例えば、可視光波長を有する光を発する発光ダイオードとすることができる。そして指紋センサ41は、例えば、照明光源から発し、指の表面で反射された光を、結像光学系(図示せず)にてエリアセンサ411上に集光することにより、保護カバー44に載置された指の指紋を撮影し、その指紋の像が写った第1の生体画像を生成する。第1の生体画像の各画素の値は、例えば、0〜255の範囲内の値となり、その画素の輝度が明るいほど、その画素値は大きくなる。本実施形態では、第1の生体画像において、隆線は明るく、谷線は暗くなる。すなわち、隆線が写っている画素の値は比較的大きくなり、一方、谷線が写っている画素の値は比較的小さくなる。なお、指紋センサ41は、全反射光学式といった他の光学方式、電界式、感圧式あるいは超音波方式といった、他の原理に基づくセンサであってもよい。他の原理に基づくセンサが用いられる場合、第1の生体画像上で隆線は暗く、谷線は明るくなることもある。
本実施形態では、指紋センサ41は、人差し指、中指及び薬指の指紋を撮影する。
【0021】
一方、静脈センサ42は、例えば、赤外光に感度を有する、Charge Coupled Device といった固体撮像素子が2次元状に配置されたエリアセンサ421を有する。さらに、静脈センサ42は、利用者の手を照明するために赤外光を発する赤外発光ダイオードなどの照明光源422を有する。そしてエリアセンサ421は、利用者の手が触れないように、筺体40の底部に配置される。そして、静脈センサ42の周囲には、筺体40の側壁が形成されており、その側壁の上端に利用者の手のひらの一部を載置可能となっている。なお側壁の上端と、保護カバー44の上面とは略水平となっている。そのため、利用者が、保護カバー44上に指を載置し、かつ側壁の上端に手のひらの一部を載置すると、利用者の指と手のひらとがほぼ水平となる。また、筺体40の上面は、静脈センサ42の上方部分が空洞となるように形成されている。そして、静脈センサ42が有する結像光学系(図示せず)が、その空洞部分に位置する手のひらの静脈パターンの像をエリアセンサ421上に結像する。そしてエリアセンサ421は、静脈パターンが写った第2の生体画像を生成する。第2の生体画像の各画素の値は、例えば、0〜255の範囲内の値となり、その画素の輝度が高いほど、その画素値は大きくなる。本実施形態では、第2の生体画像において、静脈が写っている領域及び手が写っていない部分は黒くなり、静脈がない手の部分が写っている領域は明るくなる。
【0022】
本実施形態では、第1の生体画像及び第2の生体画像の両方とも、生体画像の上端に近いほど指の先端に近い部位が写り、生体画像の下端に近いほど手首に近い部位が写る。
【0023】
また、指紋センサ41と静脈センサ42との間には、ガイド機構43が配置される。
図3(a)は、ガイド機構43の概略平面図であり、図3(b)は、図3(a)における矢印Bの方向から見たガイド機構43の概略側面図である。図2(a)、図2(b)、図3(a)及び図3(b)に示されるように、ガイド機構43は、筺体40の上面カバーから上方に向けて略垂直に突出するように配置された、木材、樹脂または金属からなる棒状の2本のピン431a、431bを有する。ピン431a、431bは、利用者の手の位置を規制するガイド部材の一例である。本実施形態では、標準的なサイズの手を持つ利用者が適切な位置に手を置いた場合に、ピン431aが人差し指と中指の付け根近辺で挟まれ、かつ、ピン431bが中指と薬指の付け根近辺で挟まれるように、ピン431a及び431bは配置される。尚、以上の説明は右手を例にして説明したが、左手の場合はピンと指の対応が右手の場合とは逆になる。以降の実施例の説明では右手を例に説明するが、生体認証装置1は左手でも同様に機能する。
【0024】
さらに、ピン431aの下端及びピン431bの下端は、それぞれ、利用者が適切な位置に手を置いたときに、利用者の手元から指先へ向かう方向(以下、便宜上縦方向と呼ぶ)に対して直交する方向(以下、便宜上横方向と呼ぶ)に沿って、筺体40の上面カバー45に形成された溝432に挿入される。そしてピン431aの下端及びピン431bの下端は、筺体40内に設けられた、平板状のピン保持部材433a、433bにより保持される。さらに、筺体40の上面カバー45の下方には、溝432の長手方向に沿って2本のレール434a及び434bが設けられている。このレール434a、434bは、それぞれ、ピン保持部材433a、433bの奥側の側端近傍に形成された溝及び手元側の側端近傍に形成された溝に対して摺動可能に係合されている。これにより、溝432の長手方向に沿って、ピン保持部材433aとともにピン431aが移動可能となっている。同様に、溝432の長手方向に沿って、ピン保持部材433bとともにピン431bが移動可能となっている。そのため、ピン431aとピン431b間の間隔は、利用者の手のサイズに応じて調節可能である。
【0025】
さらに、筺体40内には、ピン431a及びピン431bを移動させるための二つのステッピングモータ435a、435bと各ステッピングモータの駆動回路(図示せず)が配置されている。このステッピンモータ435a及び435bは、処理部6によって制御される。
ステッピングモータ435aの回転軸436aとステッピングモータ435bの回転軸436bが溝432の長手方向と平行になり、かつ、回転軸436aの先端と回転軸436bの先端が対向するように、ステッピングモータ435a、435bは配置されている。そして回転軸436aにはネジ溝が形成されており、このネジ溝がピン保持部材433aの下部に形成されたネジ溝と係合している。そのため、ステッピングモータ435aの回転角度に応じた移動量だけ、ピン保持部材433a及びピン431aが、溝432の長手方向に沿って移動する。同様に、回転軸436bにはネジ溝が形成されており、このネジ溝がピン保持部材433bの下部に形成されたネジ溝と係合している。そのため、ステッピングモータ435bの回転角度に応じた移動量だけ、ピン保持部材433b及びピン431bが、溝432の長手方向に沿って移動する。
【0026】
図4は、指紋センサ41及び静脈センサ42の撮影範囲とガイド部材であるピン431a、431bとの位置関係を示す図である。利用者は、人差し指と中指の付け根近傍でピン431aを挟み、中指と薬指の付け根近傍でピン431bを挟むように手を置く。これにより、各指の指紋401〜403が指紋センサ41の撮影範囲410に含まれ、手のひらの静脈パターン404が静脈センサ42の撮影範囲420に含まれる。
【0027】
本実施形態では、生体情報取得部4は、入力部3と別個に形成される。しかし、生体情報取得部4は、入力部3と一体的に形成されてもよい。
生体情報取得部4により生成された第1の生体画像及び第2の生体画像は、処理部6へ送られる。
【0028】
記憶部5は、例えば、半導体メモリ、磁気ディスク装置、または光ディスク装置のうちの少なくとも何れか一つを有する。そして記憶部5は、生体認証装置1で使用されるアプリケーションプログラム、少なくとも一人の登録利用者のユーザ名、ユーザ識別番号及び個人設定情報、各種のデータ等を記憶する。また記憶部5は、生体認証処理を実行するためのプログラムを記憶する。
【0029】
さらに記憶部5は、登録利用者それぞれについて、登録利用者の登録生体情報である左右何れかの手のひらの静脈パターンに関する照合用データを記憶する。この照合用データは、例えば、登録利用者の登録時に生成された第2の生体画像から抽出された静脈の端点または分岐点といった特徴的な構造を表す特徴点の位置または種別を含む。あるいは、照合用データは、登録利用者の登録時に生成された第2の生体画像そのもの、あるいはその登録時に生成された第2の生体画像の一部であってもよい。
【0030】
また記憶部5は、登録利用者それぞれについて、登録利用者の登録生体情報である左右何れかの手の人差し指、中指及び薬指の指紋に関する照合用データを記憶する。この照合用データは、例えば、登録利用者の登録時に生成された第1の生体画像から抽出された指紋の端点または分岐点といった特徴的な構造を表す特徴点の位置または種別を含む。あるいは、指紋に関する照合用データは、登録利用者の登録時に生成された第1の生体画像そのもの、あるいはその登録時に生成された第1の生体画像の一部であってもよい。
【0031】
処理部6は、1個または複数個のプロセッサ及びその周辺回路を有する。そして処理部6は、生体情報取得部4から取得した第1及び第2の生体画像を用いた生体認証処理を実行する。また処理部6は、登録利用者の生体情報を登録する登録処理を実行する。
【0032】
図5は、処理部6の機能ブロック図である。図5に示されるように、処理部6は、被写体領域検出部11と、位置判定部12と、ガイド制御部13と、照合用データ生成部14と、登録部15と、照合部16と、認証判定部17とを有する。処理部6が有するこれらの各部は、処理部6が有するプロセッサ上で実行されるコンピュータプログラムによって実装される機能モジュールである。あるいは、処理部6が有するこれらの各部は、ファームウェアとして生体認証装置1に実装されてもよい。
【0033】
被写体領域検出部11、位置判定部12、ガイド制御部13及び照合用データ生成部14は、生体認証処理の実行時及び登録処理の実行時の両方において使用される。また、登録部15は、登録処理の実行時に使用される。一方、照合部16及び認証判定部17は、生体認証処理の実行時において使用される。
【0034】
被写体領域検出部11は、第1及び第2の生体画像から、それぞれ、被写体である生体情報が写っている領域である被写体領域と、ガイド部材との位置合わせに利用される手の付け根部分を検出する。
【0035】
第1の生体画像に関して、被写体領域検出部11は、例えば、第1の生体画像中で各指の隆線が写っている画素の集合である隆線領域と谷線が写っている画素と利用者の指が写っていない画素の集合である背景領域とを区別する。なお、隆線領域は、被写体領域の一例である。
そのために、被写体領域検出部11は、例えば、第1の2値化閾値以上の画素値を持つ画素が隆線領域に含まれ、第1の2値化閾値未満の画素値を持つ画素が背景領域に含まれるように第1の生体画像を2値化する。第1の2値化閾値は、例えば、予め設定された固定値(例えば、100)、第1の生体画像内の平均画素値、あるいは、第1の生体画像全体またはその一部に含まれる画素値を判別分析することにより決定された閾値に設定される。また2値化された第1の生体画像において、隆線領域に含まれる画素の値は、例えば'1'に設定され、背景領域に含まれる画素の値は、例えば'0'に設定される。
【0036】
また、被写体領域検出部11は、照合精度が低下することを抑制するために、指の第1関節よりも手元側の部分を隆線領域から除くことが好ましい。本実施形態では、第1の生体画像上で、各指は、横方向に並んで写る。そこで被写体領域検出部11は、例えば、第1の生体画像の横方向の各行について、所定の閾値以上の画素値を持つ領域が連続する部分を指が写っている生体領域として検出する。第1の生体画像上で指が写っていない画素の値は非常に小さく、かつ、谷線が写っている画素の値よりも小さい。そこで所定の閾値は、谷線に相当する画素値未満の値、例えば、10に設定される。
【0037】
被写体領域検出部11は、第1の生体画像の上端から順に、隣接する行間で生体領域が連続しているか否かを調べる。そして隣接する行間で生体領域が連続していれば、被写体領域検出部11は、その連続した生体領域を一つの指の生体領域として連結する。
【0038】
あるいは、被写体領域検出部11は、指ごとの生体領域を求めるために、2値化された第1の生体画像における隆線領域に含まれる画素の数を列ごとに集計してもよい。そして被写体領域検出部11は、隆線領域に含まれる画素の数が極小値となる列を、隣接する二つの指の生体領域の境界としてもよい。
【0039】
ここで、第1関節は、第1の生体画像上で、横方向に沿って指の幅に相当する長さを持つ、谷線に相当する画素値かそれよりも暗い画素値を持つ画素が連続する領域となる。また、第1の生体画像の上端に近いほど、指の先端に近い部位が写る。そこで被写体領域検出部11は、第1の生体画像で、各指の生体領域について、その指の生体領域が含まれる最も上側の行を上端とし、その上端から下方向へ順に、生体領域内で所定幅だけ連続して第1の2値化閾値以下の画素値を持つ画素が連続する行を探索する。そして被写体領域検出部11は、最初に検出された行を第1関節位置とする。所定幅は、指ごとに、例えば、その指が写っている生体領域の横方向の幅の平均値に設定される。
被写体領域検出部11は、指ごとに、2値化された第1の生体画像について、検出された第1関節位置よりも下で隆線領域に含まれる画素の値を背景領域に含まれる画素の値に置換する。
さらに、被写体領域検出部11は、隆線領域を、例えば、指ごとの生体領域の境界で、それぞれの指ごとに区分することで、指ごとの隆線領域を求める。そして被写体領域検出部11は、各指の隆線領域に、対応する指を表す識別番号を付す。
【0040】
被写体領域検出部11は、記憶部5に、2値化された第1の生体画像と、隣接する指の境界の位置と、各指の識別番号を一時記憶する。
【0041】
また、第2の生体画像に関して、被写体領域検出部11は、例えば、第2の生体画像中で手のひらが写っている画素の集合である生体領域と何も写っていない画素の集合である背景領域とを区別する。本実施形態では、背景領域に含まれる画素の値は、生体領域に含まれる画素の値よりも低い。そこで被写体領域検出部11は、例えば、所定の閾値以上の画素値を持つ画素を検出し、検出された画素の集合を生体領域とする。所定の閾値は、例えば、10に設定される。
【0042】
さらに、被写体領域検出部11は、生体領域について、静脈が写っている画素の集合である静脈領域と静脈が写っていない画素の集合である非静脈領域とを区別する。なお、静脈領域は、被写体領域の一例である。本実施形態では、静脈が写っている画素の値は、静脈が写っていない画素の値よりも低い。そこで、被写体領域検出部11は、生体領域内で、例えば、第2の2値化閾値以下の画素値を持つ画素の集合を静脈領域とし、第2の2値化閾値より大きい画素値を持つ画素の集合を非静脈領域とする。第2の2値化閾値は、例えば、予め設定された固定値(例えば、150)、生体領域内の各画素の平均画素値、あるいは、生体領域に含まれる画素値を判別分析することにより決定された閾値に設定される。
被写体領域検出部11は、第2の生体画像を、静脈領域に含まれる画素と非静脈領域または背景領域に含まれる画素とに2値化する。例えば、静脈領域に含まれる画素の値は、例えば'1'に設定され、非静脈領域または背景領域に含まれる画素の値は、例えば'0'に設定される。
【0043】
利用者の指の置き方によっては、第2の生体画像に指の静脈も写ることがある。しかし、手のひらの静脈に対する指の静脈の相対的な位置は、指の開き角などによって変わる。そのため、指の静脈を照合処理に用いると、照合精度が低下するおそれがある。そこで被写体領域検出部11は、2値化された第2の生体画像に基づいて、指の付け根部分を検出し、その付け根部分よりも上側の静脈領域に含まれる画素の値を非静脈領域または背景領域に含まれる画素の値に置換することが好ましい。
【0044】
上記のように、第2の生体画像においても、上端に近いほど、指の先端に近い部位が写る。そのため、指の付け根は、第2の生体画像における上端近傍に写っている可能性がある。そこで被写体領域検出部11は、2値化された第2の生体画像の上端近傍の所定数の行において、指の間隔に相当する所定幅以上、非静脈領域または背景領域に含まれる画素値を持つ画素が連続し、かつ静脈領域で挟まれた区間を持つ行を指の付け根部分が写っている行として検出する。また被写体領域検出部11は、非静脈領域または背景領域に含まれる画素値を持つ画素が連続する区間のそれぞれについて、その区間の横方向の中心位置を求め、その中心位置を指の付け根の横方向の位置とする。そして被写体領域検出部11は、指の付け根の横方向の位置を、第2の生体画像と関連付けて記憶部5に記憶する。なお、所定の行数は、指紋が第1の生体画像に写り、かつ手のひらの静脈パターンが第2の生体画像に写るように手を配置可能な縦方向の位置ずれ量の許容幅に相当する行数、例えば、20行に設定される。被写体領域検出部11は、2値化された第2の生体画像において、指の付け根部分が写っている行のうちで最も下の行よりも上の各行に含まれる静脈領域内の画素の値を、非静脈領域または背景領域に含まれる画素の値に置換する。
被写体領域検出部11は、記憶部5に2値化された第2の生体画像を一時記憶する。
【0045】
本実施形態では、図4に示されるように、標準的なサイズの手を持つ利用者がピン431aを人差し指と中指の付け根近辺で挟み、かつ、ピン431bを中指と薬指の付け根近辺で挟むように、手を配置すると、手は適切な位置に配置される。しかし、第1の生体画像及び第2の生体画像の取得時において、ピン431a及び431bを指で挟むように配置しない場合、第1の生体画像上に指紋が写らなかったり、あるいは第2の生体画像上に静脈パターンが写らないことがある。特に、指が保護カバー44と接していなければ、第1の生体画像に指紋が写らない。
【0046】
また、手のサイズには個人差があるので、ピン431aとピン431b間の間隔が利用者の指の付け根間の間隔と一致しないことがある。このような場合、利用者は、指の付け根の近傍部分で各ピンを挟めず、適切な位置よりも手元側に手を置く可能性がある。この場合には、例えば、第2の生体画像上に指の付け根部分が写る。
さらに、利用者の手のサイズによっては、第1の生体画像に指紋が写り、かつ、第2の生体画像に手のひら全体が写るように、利用者が手を配置できないことがある。このような場合には、第1の生体画像上で指紋の一部が欠けていたり、あるいは第2の生体画像上で手のひらの静脈パターンの一部が欠けることになる。
このように、指紋が写っていなかったり、指紋の一部または静脈パターンの一部が写っていない生体画像が照合処理に用いられると、照合精度が低下するおそれがある。
【0047】
そこで、位置判定部12は、隆線領域及び静脈領域に基づいて、第1の生体画像に利用者の指の指紋全体が写り、かつ、第2の生体画像に利用者の手のひらの静脈パターン全体が写る適切な位置に利用者の手が置かれているか否かを判定する。そして位置判定部12は、指紋の一部または静脈パターンの一部が対応するセンサの撮影範囲から外れていると判定した場合、ガイド部材と指紋と静脈パターンの位置関係に基づいて、利用者の手を適切に配置するための利用者の手の移動方向を求める。
【0048】
位置判定部12は、第1の生体画像に指紋が写っているか否かを判定するために、2値化された第1の生体画像において指ごとの隆線領域に含まれる画素の総数を求める。そして位置判定部12は、各指について、その総数が所定の閾値未満であれば、第1の生体画像にその指の指紋が写っていないと判定し、一方、その総数が所定の閾値以上であれば、第1の生体画像にその指の指紋が写っていると判定する。なお、所定の閾値は、例えば、一つの指の隆線領域に含まれる標準的な画素数の1/10に設定される。また、本実施形態では、指紋センサ41は、人差し指と、中指と、薬指の指紋を撮影するので、これら3本の指の指紋が第1の生体画像に写っていれば、隣接する指の境界の数は2となる。そこで検出された隣接する指の境界の数が1以下であれば、位置判定部12は、何れかの指の指紋が写っていないと判定する。
【0049】
位置判定部12は、2値化された第1の生体画像において上下左右の何れかの画像端の画素列に、隆線領域に含まれる画素が所定数以上存在するか否か判定する。何れかの画素列に隆線領域に含まれる画素が所定数以上存在する場合、すなわち、何れかの指の隆線領域が画像端に接している場合、位置判定部12は、何れかの指の指紋が指紋センサ41の撮影範囲からはみ出していると判定する。すなわち、位置判定部12は、利用者の手の位置は適切でないと判定する。
【0050】
また、位置判定部12は、2値化された第2の生体画像において、上下左右の何れかの画像端の画素列に、静脈領域に含まれる画素が所定数以上存在するか否か判定する。何れかの画素列に静脈領域に含まれる画素が所定数以上存在する場合、手のひらの静脈パターンが第2の生体画像の画像端に接している。この場合、位置判定部12は、手のひらの静脈パターンの一部が静脈センサ42の撮影範囲からはみ出していると判定する。すなわち、位置判定部12は、利用者の手の位置は適切でないと判定する。なお所定数は、1以上の正の値、例えば、1〜5に設定される。
【0051】
一方、第1の生体画像において各指の指紋が検出され、かつ、画像端と隆線領域が接しておらず、かつ、第2の生体画像の画像端と静脈領域が接していなければ、位置判定部12は、利用者の手の位置は適切であると判定する。
【0052】
位置判定部12は、第1の生体画像に指紋が写っていないと判定した場合、表示部2に、指を保護カバー43に載せることを指示するガイドメッセージを表示させる。
【0053】
また、位置判定部12が指紋センサ41の撮影範囲の左端または右端から何れかの指の指紋がはみ出していると判定した場合、ピン431aとピン431b間の間隔が利用者の指の付け根間の間隔と一致していない可能性がある。そこで位置判定部12は、例えば、ピン431aの中心とピン431bの中心との間隔と、隣接する指の付け根の横方向の位置間の間隔との差を求める。そして位置判定部12は、その差が0になる方向を二つのピンの移動方向とする。また位置判定部12は、その差の1/2を、それぞれのピンの移動量とする。そして位置判定部12は、各ピンの移動方向及び移動量をガイド制御部13に通知する。これにより、利用者は、指の付け根付近で二つのピンを挟むことが可能となる。なお、第1及び第2の生体画像を最初に撮影する際の二つのピン431a、431b間の初期間隔は、例えば、殆どの利用者が指でピンを挟めるように十分広く設定されることが好ましい。例えば、初期間隔は、既に登録されている登録利用者について得られた第2の生体画像から求められた、指の付け根における隣接する二つの空隙の中点間の間隔の分布の上位1%に相当する間隔に設定される。
【0054】
また、位置判定部12は、手のひらの静脈パターンの手首側(すなわち、第2の生体画像における下端側)が静脈センサ42の撮影範囲から外れている場合、被写体領域検出部11により、第2の生体画像上で指の付け根が検出されているか否か判定する。そして第2の生体画像上で指の付け根が検出されていれば、位置判定部12は、表示部2に、指の付け根付近で二つのピンを挟むよう、縦方向に手を移動させることを指示するガイドメッセージを表示させる。
さらに、位置判定部12は、第2の生体画像の対向する2辺と静脈像が接している場合、利用者の手のひらが静脈センサ42の撮影範囲に収まらないと判定し、そのことを示す範囲外れフラグを設定する。
【0055】
ガイド制御部13は、利用者の手が適切な位置となるように、位置判定部12から通知された移動方向に沿って通知された移動量だけガイド部材を移動させるよう、生体情報取得部4のガイド機構43を制御する。
そのために、ガイド制御部13は、通知された移動方向及び移動量に相当する回転角だけステッピングモータ435a、435bを回転させる命令を、ステッピングモータ435a、435bの駆動回路へ送信する。
【0056】
処理部6は、ガイド制御部13がピン431a、431bの位置を移動させてから、あるいは手を移動させるガイドメッセージを表示部2に表示させてから所定時間(例えば、1秒〜3秒)経過した後、生体情報取得部4に指紋及び静脈パターンを再撮影させる。そして得られた第1の生体画像及び第2の生体画像を生体情報取得部4から受け取る。
【0057】
照合用データ生成部14は、第1及び第2の生体画像から、照合処理で用いられる照合用データを生成する。例えば、生体認証装置1がマニューシャマッチングにより照合処理を行う場合、照合用データ生成部14は、そのマニューシャマッチングで用いられる特徴点(マニューシャと呼ばれる)を第1及び第2の生体画像から抽出し、その特徴点の位置またはその特徴点の種類を照合用データとする。
【0058】
指紋が写っている第1の生体画像に関して、照合用データ生成部14は、マニューシャマッチングで用いられる特徴点として、例えば、第1の生体画像から、隆線の分岐点及び端点を抽出する。そのために、照合用データ生成部14は、2値化された第1の生体画像上で隆線に相当する画素値を持つ画素の集合に対して細線化処理を行って、隆線が細線化された細線化2値画像を生成する。そして照合用データ生成部14は、隆線の分岐点または端点の何れかに対応する複数のテンプレートを用いて細線化2値画像を走査することにより、何れかのテンプレートと一致するときの細線化2値画像上の位置を検出する。そして照合用データ生成部14は、検出された位置の中心画素を、マニューシャとして抽出する。なお、テンプレートは、例えば、3×3画素で表され、隆線の分岐点または端点に対応する2値パターンを持つ。さらに、照合用データ生成部14は、指紋の渦中心または三角州といった特異点をマニューシャとして抽出してもよい。なお、照合用データ生成部14は、例えば、隆線の分岐点または端点を検知するのと同様に、特異点に対応するテンプレートと生体画像とのパターンマッチングを行うことにより特異点を検出できる。
【0059】
照合用データ生成部14は、抽出された各マニューシャがどの指の隆線領域に含まれるかを、例えば、隣接する指の境界の位置とマニューシャの位置を比較することにより判定する。そして照合用データ生成部14は、各マニューシャに、そのマニューシャが含まれる隆線領域に対応する指の識別番号を関連付ける。
なお、照合用データ生成部14は、特定の一つ以上の指、例えば、人差し指に対応する隆線領域についてのみ、マニューシャを抽出してもよい。
【0060】
手のひらの静脈パターンが写っている第2の生体画像に関して、照合用データ生成部14は、2値化された第2の生体画像から、静脈の分岐点及び端点を抽出する。そのために、照合用データ生成部14は、例えば、2値化された第2の生体画像上で静脈に相当する画素値を持つ画素の集合に対して細線化処理を行って、静脈が細線化された細線化2値画像を生成する。そして照合用データ生成部14は、静脈の分岐点または端点の何れかに対応する複数のテンプレートを用いて細線化2値画像を走査することにより、何れかのテンプレートと一致するときの細線化2値画像上の位置を検出する。そして照合用データ生成部14は、検出された位置の中心画素を、マニューシャとして抽出する。
【0061】
なお照合用データ生成部14は、隆線の端点、分岐点または特異点をマニューシャとして求める公知の他の方法を用いて、第1の生体画像からマニューシャを抽出してもよい。同様に、静脈の端点及び分岐点をマニューシャとして求める公知の他の方法を用いて、第2の生体画像からマニューシャを抽出してもよい。また、照合用データ生成部14は、第1及び第2の生体画像上で指紋または静脈パターンの特徴を表す他の特徴量を照合用データとして求めてもよい。例えば、照合用データ生成部14は、各指の隆線領域を複数のブロックに分割し、ブロックごとの隆線方向を照合用データとして求めてもよい。また、照合用データ生成部14は、静脈領域を複数のブロックに分割し、ブロックごとの静脈本数を照合用データとして求めてもよい。
【0062】
また、生体認証装置1がパターンマッチングにより照合処理を行う場合、照合用データ生成部14は、第1の生体画像そのもの、あるいは第1の生体画像から一部の領域を切り出して、照合用データとしてもよい。第1の生体画像の一部を照合用データとする場合、その一部の領域は、第1の生体画像に写っている各指の指紋を含むことが好ましい。そこで、照合用データ生成部14は、例えば、各指の隆線領域の外接矩形で囲まれた領域を第1の生体画像からトリミングして、そのトリミングされた領域を照合用データとしてもよい。
同様に、照合用データ生成部14は、第2の画像そのもの、あるいは第2の生体画像上の静脈領域を含む一部の領域を第2の生体画像から切り出して、照合用データとしてもよい。さらに照合用データ生成部14は、各生体画像全体または各生体画像の一部に対して、エッジ強調処理またはムラ補正処理などを行って得られた画像を照合用データとしてもよい。
【0063】
登録部15は、入力部2から得た登録利用者の識別情報と、第1及び第2の生体画像からそれぞれ作成された照合用データとを関連付けて記憶部5に記憶する。また登録部15は、第2の生体画像に関して範囲外れフラグが設定されている場合、その範囲外れフラグも登録利用者の識別情報と関連付けて記憶部5に記憶する。
【0064】
照合部16は、利用者の照合用データと、入力部2を介して入力された識別情報と一致する識別情報を持つ登録利用者の照合用データとを用いて、利用者の各指の指紋及び静脈パターンと登録利用者の各指の指紋及び静脈パターンとを照合する。そして照合部16は、照合処理の結果として、利用者の指紋及び静脈パターンが登録利用者の指紋及び静脈パターンに類似している度合いを表す類似度を求める。
【0065】
照合部16は、照合処理として、例えば、マニューシャマッチング、あるいはパターンマッチングを用いることができる。
【0066】
照合部16は、指紋の照合に関して、例えば、予め設定された何れかの指の指紋についての照合用データ、または第1の生体画像に写っている全ての指の指紋についての照合用データを用いて、照合処理を実行する。
【0067】
照合部16は、マニューシャマッチングを用いる場合、注目する指についての登録利用者の照合用データに含まれるマニューシャと、利用者の照合用データに含まれるマニューシャとの間で一致するマニューシャの個数を求める。そして照合部16は、その一致する個数を利用者の注目する指について抽出されたマニューシャの個数で割ることにより、注目する指についての利用者の指紋と登録利用者の指紋との類似度を算出できる。
あるいは、照合部16は、パターンマッチングを用いる場合、注目する指領域同士の相対的な位置を変えつつ正規化相互相関値を算出する。そして照合部16は、その正規化相互相関値の最大値を、注目する指についての利用者の指紋と登録利用者の指紋との類似度とする。
【0068】
なお、照合部16は、複数の指の照合用データを用いて照合処理を実行する場合、照合部16は、第1の生体画像に写っているそれぞれの指について類似度を算出する。そして照合部16は、算出された類似度の平均値または最大値を利用者の指紋と登録利用者の指紋間の類似度とする。
【0069】
静脈パターンの照合に関しても、照合部16は、指紋に関する類似度を算出する処理と同様の処理を行うことで、登録利用者の静脈パターンと利用者の静脈パターン間の類似度を算出できる。例えば、照合部16は、マニューシャマッチングを用いる場合、静脈パターンについての登録利用者の照合用データに含まれるマニューシャと、利用者の照合用データに含まれるマニューシャとの間で一致するマニューシャの個数を求める。そして照合部16は、その一致する個数を利用者の静脈パターンについて抽出されたマニューシャの個数で割ることにより、利用者の静脈パターンと登録利用者の静脈パターンとの類似度を算出できる。
あるいは、照合部16は、パターンマッチングを用いる場合、利用者の第2の生体画像と登録利用者の第2の生体画像間の相対的な位置を変えつつ、正規化相互相関値を算出する。そして照合部16は、その正規化相互相関値の最大値を、利用者の静脈パターンと登録利用者の静脈パターンとの類似度とする。
【0070】
照合部16は、指紋の類似度と静脈パターンの類似度とを、登録利用者の識別情報とともに、それぞれ認証判定部17へ渡す。
【0071】
なお、利用者の識別情報が入力されていない場合、照合部16は、各登録利用者について、それぞれ指紋の類似度と静脈パターンの類似度を求める。そして照合部16は、指紋の類似度と静脈パターンの類似度の合計が最大となる登録利用者を選択する。
そして照合部16は、類似度の合計の最大値に対応する指紋の類似度及び静脈パターンの類似度と、その最大値に対応する登録利用者の識別情報を認証判定部17へ渡す。
【0072】
認証判定部17は、指紋の類似度と静脈パターンの類似度の合計が認証判定閾値以上となる場合、利用者の指紋及び静脈パターンと登録利用者の指紋及び静脈パターンは一致すると判定する。そして認証判定部17は、利用者を、その登録利用者として認証する。認証判定部17は、利用者を認証すると、その認証結果を処理部6へ通知する。
【0073】
一方、認証判定部17は、類似度の合計が認証判定閾値未満となる場合、利用者の指紋及び静脈パターンと登録利用者の指紋及び静脈パターンは一致しないと判定する。この場合には、認証判定部17は、利用者を認証しない。認証判定部17は、利用者の認証に失敗したことを示す認証結果を処理部6へ通知する。そして処理部6は、表示部2に、認証結果を表す認証結果情報を送信してもよい。
【0074】
認証判定閾値は、何れかの登録利用者本人が利用者である場合にのみ、認証判定部17が認証に成功するような値に設定されることが好ましい。そして認証判定閾値は、登録利用者とは異なる他人が利用者である場合には、認証判定部17が認証に失敗するような値に設定されることが好ましい。例えば、認証判定閾値は、指紋についての類似度と静脈パターンの類似度の合計が取りうる最大値と最小値の差に0.7を乗じた値を、類似度の合計の最小値に加えた値とすることができる。
【0075】
また、利用者または登録利用者に範囲外れフラグが設定されている場合、認証判定部17は、利用者の指紋と登録利用者の指紋間の類似度が個別認証判定閾値以上となる場合、利用者の指紋と登録利用者の指紋は一致すると判定する。そして認証判定部17は、利用者を、その登録利用者として認証してもよい。なお、個別認証判定閾値は、例えば、指紋の類似度が取り得る最大値と最小値の差に0.7を乗じた値を、指紋の類似度の最小値に加えた値とすることができる。
あるいは、認証判定部17は、利用者の指紋と登録利用者の指紋間の類似度が個別認証判定閾値以上となり、かつ、入力されたパスワードが登録利用者のパスワードと一致している場合に限り、利用者を、その登録利用者として認証してもよい。
【0076】
図6は、処理部6により実行される生体認証処理の動作フローチャートである。
処理部6が生体情報取得部4から第1及び第2の生体画像を受け取ると、処理部6の被写体領域検出部11は、第1の生体画像上で隆線が写っている隆線領域を検出する。また被写体領域検出部11は、第2の生体画像上で静脈パターンが写っている静脈領域を検出する(ステップS101)。次に、処理部6の位置判定部12は、隆線領域及び静脈領域に基づいて各指の指紋及び静脈パターンが、それぞれ、指紋センサ41及び静脈センサ42の撮影範囲に収まっているか否か判定する(ステップS102)。何れかの指の指紋が指紋センサ41の撮影範囲から外れているか、または静脈パターンが静脈センサ42の撮影範囲から外れている場合(ステップS102−No)、処理部6のガイド制御部13は、利用者の手の位置が適切となるようにガイド部材の位置を調節する。または、処理部6は、利用者が手を適切な位置に置くためのガイドメッセージを表示部2に表示させる(ステップS103)。そして処理部6は、生体情報所得部4に再度、利用者の指及び手のひらを撮影させて、第1及び第2の生体画像を再取得する(ステップS104)。その後、処理部6は、ステップS101以降の手順を再度実行する。
【0077】
一方、各指の指紋及び静脈パターンが、それぞれ、指紋センサ41及び静脈センサ42の撮影範囲に収まっている場合(ステップS102−Yes)、利用者の手の位置は適切である。そこで処理部6の照合用データ生成部14は、第1及び第2の生体画像から、それぞれ照合用データを生成する(ステップS105)。そして処理部6は、その照合用データを照合部16に渡す。さらに処理部6は、入力部2を介して利用者の識別情報を取得している場合、その識別情報と一致する識別情報と関連付けられた登録利用者の照合用データを記憶部5から読み出して、その照合用データを照合部16に渡す。一方、利用者の識別情報が入力されていない場合、処理部6は、全ての登録利用者の照合用データを記憶部5から読み出して、各照合用データ及び対応する登録利用者の識別情報を照合部16へ渡す。
【0078】
照合部16は、利用者の指紋についての照合用データと登録利用者の指紋についての照合用データとに基づいて利用者の指紋と登録利用者の指紋の類似度を算出する。また照合部16は、利用者の静脈パターンについての照合用データと登録利用者の静脈パターンについての照合用データとに基づいて利用者の静脈パターンと登録利用者の静脈パターンの類似度を算出する(ステップS106)。そして照合部16は、指紋の類似度及び静脈パターンの類似度とともに、登録利用者の識別情報を認証判定部17へ渡す。なお、利用者の識別番号が得られていない場合には、照合部16は、各登録利用者について求めた利用者の指紋に対する類似度及び利用者の静脈パターンに対する類似度の合計の最大値を求める。そして照合部16は、その最大値とともに、その最大値に対応する登録利用者の識別情報を認証判定部17へ渡す。
【0079】
認証判定部17は、類似度の合計が認証判定用閾値以上となるか否か判定する(ステップS107)。
類似度の合計が認証判定用閾値以上である場合(ステップS107−Yes)、認証判定部17は、利用者を登録利用者として認証する(ステップS108)。
一方、類似度の合計が認証判定用閾値未満である場合(ステップS107−No)、認証判定部17は利用者を認証しない(ステップS109)。
ステップS108またはS109の後、生体認証装置1は、生体認証処理を終了する。
なお、生体認証装置1が登録処理を行う場合、上記のステップS106〜S109の手順の代わりに、登録部15が、利用者の識別情報とともに照合用データを記憶部5に記憶する手順を実行すればよい。
【0080】
以上に説明してきたように、この実施形態による生体認証装置は、二つの生体画像のうちの少なくとも一方に写っている被写体領域から、利用者の手の位置が指紋及び手のひらの静脈パターンを撮影するのに適切か否かを判定する。そしてこの生体認証装置は、利用者の手の位置が適切でない場合、ガイド部材と画像上の被写体領域から求められる指紋または静脈パターン間の位置関係に基づいて、利用者の手の位置が適切となるように手の移動方向を求める。また、この生体認証装置は、ガイド部材の位置を修正することにより利用者の手の位置が適切となる場合、自動的にガイド部材の位置を修正するように、ガイド機構を制御する。そのため、利用者が生体認証装置に不慣れでも、この生体認証装置は、利用者の手を適切な位置に配置し、適切な位置に配置された手を撮影できる。したがって、この生体認証装置は、指の指紋と手のひらの静脈パターンの両方について照合に適した画像を得ることができる。
【0081】
次に、第2の実施形態による、生体認証装置について説明する。第2の実施形態による生体認証装置は、第1の実施形態による生体認証装置と比較して、ガイド機構が有するガイド部材の形状が異なる点、及び第1の生体画像上の隆線領域から指紋の存在範囲を推定し、推定された存在範囲をガイド部材の位置の調節に利用する点で異なる。
そこで以下では、第2の実施形態による生体認証装置の各構成要素のうち、第1の実施形態による生体認証装置の構成要素と相違する点について説明する。第2の実施形態による生体認証装置のその他の構成要素の詳細については、第1の実施形態による生体認証装置の対応する構成要素についての説明を参照されたい。
【0082】
図7(a)は、第2の実施形態による生体認証装置が有する生体情報取得部4の概略平面図であり、図7(b)は、図7(a)における矢印Cの方向から見た生体情報取得部4の概略側面図である。なお、図7(a)及び図7(b)において、生体情報取得部4の各部には、図3(a)及び図3(b)に示された生体情報取得部4の対応する構成要素の参照番号と同じ参照番号を付した。
【0083】
第2の実施形態においても、指紋センサ41と静脈センサ42との間にガイド機構43が配置される。ただし、この実施形態では、ガイド機構43は、ガイド部材として、上面カバー45上に突出するように配置され、木材、樹脂または金属からなる波型ガイド481a、481bを有する。波形ガイド481a、481bの横方向の断面は、上側に凸な略三角形形状となり、かつ波形ガイド481a及び481bの縦方向のサイズは、その波形ガイドの横方向のサイズよりも大きい。指紋及び静脈パターンを撮影する際、利用者は、波形ガイド481aを人差し指と中指で挟み、波形ガイド481bを中指と薬指で挟むように手を置く。波形ガイド481a及び481bは、縦方向にある程度の長さを有し、その結果として利用者の指と波形ガイドとが接触する面積が、第1の実施形態における二つのピンと利用者の指とが接触する面積よりも大きい。そのため、波形ガイド481a及び481bは、第1の実施形態における二つのピンよりも良好に利用者の手を固定できる。
【0084】
なお、波形ガイド481aの下端及び481bの下端には、それぞれ、棒状の突出部が形成されており、この突出部が筺体40の上面カバー45に形成された溝432に挿入される。そして波形ガイド481a及び481bの突出部は、それぞれ、筺体40内に設けられた、保持部材433a、433bにより保持される。この保持部材433a及び433bは、それぞれ、第1の実施形態と同様に、筺体40内に設けられたステッピングモータ435a、435bにより駆動されて、溝432に沿って横方向に移動可能に保持されている。そのため、波形ガイド481aと481b間の間隔は、利用者の手のサイズに応じて調節可能である。なお、保持部材433a及び433bの構造及び保持部材433a、433bを移動可能に保持するための構造の詳細については、図3(a)及び図3(b)を参照されたい。
【0085】
この実施形態でも、生体情報取得部4は、指の先端側に配置された指紋センサ41により、利用者の複数の指の指紋を撮影した第1の生体画像と、手元側に配置された静脈センサ42により、利用者の手のひらの静脈パターンを撮影した第2の生体画像を生成する。そして生体情報取得部4は、第1の生体画像及び第2の生体画像を処理部6へ送信する。
【0086】
第2の実施形態による生体認証装置の処理部6も、第1の実施形態による生体認証装置の処理部と同様に、被写体領域検出部11と、位置判定部12と、ガイド制御部13と、照合用データ生成部14と、登録部15と、照合部16と、認証判定部17とを有する。このうち、被写体領域検出部11、照合用データ生成部14、登録部15、照合部16及び認証判定部17は、第1の実施形態による生体認証装置の対応する構成要素と同じ機能を有する。そこで以下では、位置判定部12及びガイド制御部13について説明する。
【0087】
位置判定部12は、指紋の一部が指紋センサ41の撮影範囲から外れているか否か、及び手のひらの静脈パターンの一部が静脈センサ42の撮影範囲から外れているか否かを判定する。位置判定部12は、第1の実施形態と同様に、第1の生体画像の上下左右の何れかの画像端に隆線領域に含まれる画素が所定数以上存在する場合、指紋の一部が指紋センサ41の撮影範囲から外れていると判定する。また位置判定部12は、第2の生体画像の上下左右の何れかの画像端に静脈領域に含まれる画素が所定数以上存在する場合、静脈パターンの一部が静脈センサ42の撮影範囲から外れていると判定する。なお、静脈パターンの一部が静脈センサ42の撮影範囲から外れているか否かを判定する前に、被写体領域検出部11は、指の部分の静脈が写っている画素を静脈領域から除くことが好ましい。
【0088】
位置判定部12は、何れかの指の指紋の一部が指紋センサ41の撮影範囲から外れている場合、第1の生体画像の画像平面における、その指紋の存在範囲を推定する。そのために、位置判定部12は、2値化された第1の生体画像において画像端に接した指の隆線領域を、指紋に外接する図形で近似する。本実施形態では、指紋に外接する図形は、楕円形とする。
【0089】
位置判定部12は、例えば、任意の楕円形を規定する5個のパラメータ(中心の横方向座標cx及び縦方向座標cy、長軸半径rx、短軸半径ry及び長軸方向p)を様々に変更しつつ、指紋センサ41の撮影範囲から一部が外れた指の指紋の隆線領域が全て含まれる楕円形を求める。そして位置判定部12は、そのような楕円のうちで、面積が最小となる楕円を、その指紋の存在範囲として推定する。
【0090】
同様に、位置判定部12は、手のひらの静脈パターンの一部が静脈センサ42の撮影範囲から外れている場合、静脈パターンの存在範囲を静脈パターンに外接する図形で近似することで、第2の生体画像の画像平面における静脈パターンの存在範囲を推定する。例えば、静脈パターンに外接する図形は、楕円形とする。そして位置判定部12は、静脈領域が全て含まれる楕円形のうち、面積が最小となる楕円を、静脈パターンの存在範囲として推定する。
【0091】
なお、第1の生体画像の画像端と接していない隆線領域に対応する指の指紋については、隆線領域そのものを指紋の存在範囲とする。また、手のひらの静脈パターン全体が第2の生体画像に写っている場合には、静脈領域そのものを静脈パターンの存在範囲とする。
【0092】
なお、指紋に外接する図形及び静脈パターンに外接する図形は楕円に限られない。指紋に外接する図形及び静脈パターンに外接する図形は、例えば、複数の登録利用者の指紋の外径形状を平均化した図形及び静脈パターンの外径形状を平均化した図形としてもよい。
【0093】
位置判定部12は、利用者の手の位置が適切となるような手及び波形ガイドの移動方向と移動量を求めるために、指紋の存在範囲及び静脈パターンの存在範囲を、波形ガイドと各センサの位置関係に基づいて仮想的に移動させる。そして位置判定部12は、移動後の指紋の存在範囲が指紋センサ41の撮影範囲に収まり、かつ、移動後の静脈パターンの存在範囲が静脈センサ42の撮影範囲に収まるか否か判定する。そこで、位置判定部12は、第1の生体画像上の指紋と第2の生体画像上の静脈パターンとを、実空間での位置関係を表す共通座標系で扱えるように、各生体画像上の座標を、実空間での各センサの撮影範囲の位置関係及び各センサの解像度に基づいて、共通座標系に変換する。共通座標系では、横方向及び縦方向の単位長は、例えば、1mmに設定される。
【0094】
図8は、共通座標系で表現された指紋の存在範囲と静脈パターンの存在範囲の一例を示す図である。共通座標系800では、実空間での縦方向がy軸、横方向がx軸で表される。そして第2の生体画像の下端、すなわち、静脈センサ42の撮影範囲のうちの手元側の境界のy軸座標が0であり、指の先端に近いほどy軸の座標値が大きくなるように設定されている。したがって、静脈センサ42の撮影範囲810よりも、指紋センサ41の撮影範囲820の方が上側に位置する。また、共通座標系800では、静脈パターンの存在範囲が楕円811で表され、人差し指、中指、薬指のそれぞれの指紋の存在範囲が楕円821〜823で表されている。そしてこの例では、人差し指の存在範囲821及び薬指の存在範囲823の一部が指紋センサ41の撮影範囲820から外れている。
【0095】
図9は、第2の実施形態による位置調整処理の動作フローチャートである。なお、この位置調整処理は、図6に示された第1の実施形態による生体認証処理のステップS102〜S104の手順の代わりに実行される。
処理部6の位置判定部12は、照合対象となる全ての指が第1の生体画像に写っているか否か判定する(ステップS201)。位置判定部12が第1の実施形態と同様に、隆線領域に基づいて第1の生体画像に写っている指の数を求め、その指の数が照合対象となる指の数と等しければ、照合対象となる全ての指が写っていると判定する。
何れかの指の指紋が写っていない場合(ステップS201−No)、位置判定部12は、表示部2に、保護カバー上に指を置くことを指示するガイドメッセージを表示させる(ステップS202)。一方、照合対象となる全ての指の指紋が写っている場合(ステップS201−Yes)、位置判定部12は、何れかの指の指紋の一部または静脈パターンの一部がセンサの撮影範囲から外れているか否か判定する(ステップS203)。何れの指の指紋もセンサの撮影範囲内に収まっており、かつ静脈パターンもセンサの撮影範囲内に収まっている場合(ステップS203−Yes)、位置判定部12は、手の位置は適切であると判定する。そして位置判定部12は、位置調整処理を終了する。
一方、何れかの指の指紋の一部、または静脈パターンの一部がセンサの撮影範囲から外れている場合(ステップS203−No)、位置判定部12は、各指の指紋の存在範囲及び手のひらの静脈パターンの存在範囲を推定する(ステップS204)。そして位置判定部12は、各指の指紋及び静脈パターンの存在範囲を仮想的な手の移動に応じて修正することにより、手の移動によって手が適切な位置となるか否か判定する(ステップS205)。
【0096】
手の移動によって手が適切な位置となる場合(ステップS205−Yes)、位置判定部12は、手の移動方向及び移動量を指示するガイドメッセージを表示部2に表示させる(ステップS206)。
一方、手を移動させても手が適切な位置とならない場合(ステップS205−No)、位置判定部12は、波形ガイドの移動によって手が適切な位置となるか否か判定する(ステップS207)。
【0097】
波形ガイドの移動によって手が適切な位置となる場合(ステップS207−Yes)、位置判定部12は、波形ガイドの移動方向及び移動量をガイド制御部13へ通知し、ガイド制御部13に波形ガイドを移動させる(ステップS208)。
一方、波形ガイドを移動させても手が適切な位置とならない場合(ステップS207−No)、位置判定部12は、波形ガイド及び手の移動によって手が適切な位置となるか否か判定する(ステップS209)。波形ガイド及び手の移動によって手が適切な位置となる場合(ステップS209−Yes)、位置判定部12は、波形ガイドの移動方向及び移動量をガイド制御部13へ通知し、ガイド制御部13に波形ガイドを移動させる。さらに位置判定部12は、手の移動方向及び移動量を指示するガイドメッセージを表示部2に表示させる(ステップS210)。
一方、波形ガイド及び手を移動させても手が適切な位置とならない場合(ステップS209−No)、位置判定部12は、範囲はずれフラグを設定する(ステップS211)。その後、位置判定部12は、位置調整処理を終了する。
また、ステップS202、S206、S208またはS210の後、処理部6は、生体情報取得部4に指紋及び静脈パターンを再撮影させ、その再撮影により生成された第1及び第2の生体画像を生体情報取得部4から取得する(S212)。その後、処理部6は、ステップS201以降の手順を再度実行する。
【0098】
本実施形態における波形ガイドは、指の長手方向がその波形ガイドに沿った方向に向くように固定することができる。そのため、利用者が波形ガイドに沿って手を動かす場合、指を動かせる方向は限られる。
【0099】
図10は、波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の一例を表す図である。点線で表された楕円1001〜1004は、それぞれ、人差し指、中指及び薬指の指紋の存在範囲と静脈パターンの存在範囲を表す。また点1011〜1013は、それぞれ、波形ガイド481aの中点と波形ガイド481bの中点を結んだ線と指の中心線との交点である。指は、波形ガイド481a、481bに沿った方向にしか移動できないので、利用者が手を動かしても、常にこの交点1011〜1013は指と重なる。そこでこの交点を、以下では、便宜上固定点と呼ぶ。また、手の構造上、指は、指の付け根1021〜1023を回転軸として回転する。したがって、例えば、指の付け根の間隔よりも、波形ガイドの間隔の方が広ければ、利用者が手元側へ手を移動させると、各指の指紋の存在範囲間のx軸方向の間隔が狭くなる。その結果、各指の指紋の存在範囲は、例えば、それぞれ、実線で表された楕円1031〜1033となる。また、静脈パターンの存在範囲は下方へ移動し、実線で表された楕円1034となる。このように、利用者の手を仮想的に所定方向に所定距離だけ移動させた場合の、指紋の仮想的な存在範囲は、指の付け根に相当する回転軸の位置と波形ガイドの位置によって推定される。以下では、利用者の手を仮想的に移動させた場合の、指紋の仮想的な存在範囲を、便宜上、仮想指紋範囲と呼ぶ。同様に、利用者の手を仮想的に移動させた場合の、静脈パターンの仮想的な存在範囲を、便宜上、仮想静脈範囲と呼ぶ。
【0100】
本実施形態では、二つの波形ガイドは縦方向に沿って平行に配置されているので、利用者の手の移動方向は縦方向に限定される。そこで位置判定部12は、手を仮想的に縦方向に所定距離だけ移動させたときの各指の仮想指紋範囲を以下のように推定する。
位置判定部12は、各指の回転軸の位置を縦方向に所定の微小距離(例えば、1mm)移動させる。なお各指の回転軸は、指紋の存在範囲の重心と固定点とを通る直線が静脈パターンの存在範囲の上側の境界と交差する点とすることができる。そして位置判定部12は、指毎に、移動後の回転軸の位置を始点として、固定点を通り、かつ、手を仮想的に移動させる前の回転軸から指紋の存在範囲の重心までの線分と同一の長さを持つ線分の終点を、移動後の指紋の存在範囲の重心とする。また位置判定部12は、移動前の回転軸と固定点を通る線分に対して、移動後の回転軸と固定点を通る線分がなす角だけ、元の指紋の存在範囲に対して仮想指紋範囲を回転させる。
なお、手を仮想的に縦方向に所定距離だけ移動させることにより、静脈パターンの存在範囲も、縦方向にその所定距離だけ移動する。
【0101】
位置判定部12は、仮想指紋範囲が指紋センサ41の撮影範囲に収まるか否か判定する。そのために、位置判定部12は、仮想指紋範囲を表す楕円と指紋センサ41の撮影範囲の左右端または上下端を表す線とが交差するか否か判定する。本実施形態では、共通座標系において指紋センサ41の撮影範囲の左右端はy軸と平行になっており、指紋センサ41の撮影範囲の上下端はx軸と平行になっている。そこで位置判定部12は、仮想指紋範囲の左右端のx軸座標が指紋センサ41の撮影範囲の左右端のx軸座標の間に位置し、かつ、仮想指紋範囲の上下端のy軸座標が撮影範囲の上下端のy軸座標の間に位置すれば、仮想指紋範囲は撮影範囲に含まれていると判定する。なお、各センサの筐体に対する取り付け誤差により、指紋センサ41の撮影範囲の端部が、共通座標系のx軸またはy軸と平行でないことがある。そこで位置判定部12は、指紋センサ41の撮影範囲の上下端及び左右端を表す直線の方程式と注目する指の仮想指紋範囲を表す楕円の方程式との交点を求める。この場合、交点がなければ、位置判定部12は、注目する指の仮想指紋範囲は指紋センサ41の撮影範囲に含まれていると判定する。
【0102】
なお、撮影範囲の何れかの画像端を表す直線の方程式は、例えば以下の式で表される。
【数1】
ここで(x0,y0)は、画像端を表す直線が通る点の座標であり、dは、その直線がx軸となす角度である。また、仮想指紋範囲を表す楕円の方程式は、例えば、以下の式で表される。
【数2】
ここで、(cx,cy)は、楕円の中心の座標であり、rx及びryは、それぞれ、長軸半径及び短軸半径である。そしてpは、長軸方向を表す。この場合、次式で算出される判定値Dが0以上であれば、画像端を表す直線と仮想指紋範囲を表す楕円との交点が存在し、判定値Dが負であれば、画像端を表す直線と仮想指紋範囲を表す楕円との交点は存在しない。
【数3】
【0103】
位置判定部12は、静脈パターンの仮想存在範囲の上端または下端が静脈センサ42の撮影範囲の上端または下端と接するまで、所定の微小距離ずつ手を縦方向に仮想的に移動させる。そして手をその微小距離だけ移動させる度に、位置判定部12は、各指の仮想指紋範囲が指紋センサ41の撮影範囲に収まるか否か判定する。そして位置判定部12は、各指の仮想指紋範囲が指紋センサ41の撮影範囲に収まれば、手を移動するだけで手を適切な位置に置けると判定する。そして位置判定部12は、手を仮想的に移動させた距離の合計だけ、利用者の手を縦方向に移動させることを指示するガイドメッセージを表示部2に表示させる。
【0104】
なお、静脈パターンの一部が静脈センサ42の撮影範囲の下端から外れており、各指の指紋全体が指紋センサ41の撮影範囲に収まっている場合には、位置判定部12は、仮想静脈範囲が静脈センサ42の撮影範囲に収まる距離だけ仮想的に手を上方に移動させる。そして位置判定部12は、上記と同様に各指の仮想指紋範囲を求め、その仮想指紋範囲が指紋センサ41の撮影範囲に収まっていれば、利用者の手を移動するだけで手を適切に配置できると判定する。この場合、位置判定部12は、手を仮想的に移動させた距離だけ、利用者の手を上方向(すなわち、指の先端側)へ移動させることを指示するガイドメッセージを表示部2に表示させる。
【0105】
一方、静脈パターンの仮想存在範囲の上端または下端が静脈センサの撮影範囲の上端または下端と接しても、何れかの指の仮想指紋範囲が指紋センサの撮影範囲に収まらない場合、位置判定部12は、手を移動させても手が適切な位置とならないと判定する。この場合、上記のように、位置判定部12は、波形ガイドを移動させることで利用者の手が適切な位置となるか否かを判定する。
【0106】
次に、波形ガイドを移動させることで利用者の手が適切な位置となるか否かの判定の詳細について説明する。
【0107】
図11は、波形ガイドと指紋の存在範囲及び静脈パターンの存在範囲との位置関係の他の一例を表す図である。楕円1101〜1104は、それぞれ、人差し指、中指及び薬指の指紋の存在範囲と静脈パターンの存在範囲を表す。また点1111〜1113は、それぞれ、波形ガイド481aの中点と波形ガイド481bの中点を結んだ線と指の中心線との交点である固定点である。また、点1121〜1123は、それぞれ、人差し指、中指、薬指の回転軸である。
【0108】
波形ガイド481a及び481bとの間隔を狭めるように、波形ガイド481a及び481bが移動したとする。これに伴い、固定点1111が点1131まで移動し、固定点1113が点1133まで移動するように、利用者の手が仮想的に移動したとする。この場合には、回転軸1121〜1123は移動しないので、回転軸を中心とする円弧に沿って各指の指紋の存在範囲も移動し、その結果、人差し指の仮想指紋範囲は楕円1141となり、薬指の仮想指紋範囲は楕円1143となる。このように、何れかの指の指紋の存在範囲が指紋センサの撮影範囲から外れていても、波形ガイドを移動させることで、各指の指紋の存在範囲の間隔が狭くなり、各指の指紋の存在範囲が指紋センサの撮影範囲に収まることがある。
【0109】
本実施形態では、波形ガイドは横方向、すなわち、指の幅方向にのみ移動可能となっている。そこで位置判定部12は、波形ガイドを仮想的に横方向に所定距離だけ移動させたときの各指の仮想指紋範囲を以下のように推定する。
位置判定部12は、各指の固定点の位置を、波形ガイドの移動に合わせて横方向に所定の微小距離(例えば、1mm)移動させる。例えば、波形ガイド481aと波形ガイド481b間の間隔がその微小距離だけ狭くなるように波形ガイド481aと481bが移動する場合には、人差し指の固定点と薬指の固定点間の間隔も所その微小距離だけ狭くなる。そして位置判定部12は、指ごとに、移動後の回転軸の位置を始点として、固定点を通り、かつ、手を仮想的に移動させる前の回転軸から指紋の存在範囲の重心までの線分と同一の長さを持つ線分の終点を、移動後の指紋の存在範囲の重心とする。
なお、この場合には、静脈パターンの存在範囲の位置は変更しない。
【0110】
位置判定部12は、各波形ガイドが移動可能な範囲で、所定の微小距離ずつ各波形ガイドを横方向に仮想的に移動させる。そして波形ガイドをその微小距離だけ移動させる度に、位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まるか否か判定する。なお、位置判定部12は、二つの波形ガイド間の間隔が狭くなるように、各波形ガイドを仮想的に移動させてもよく、あるいは、二つの波形ガイドを同一の方向へ仮想的に移動させてもよい。そして位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まれば、波形ガイドを移動するだけで手を適切な位置に置けると判定する。そして位置判定部12は、波形ガイドを仮想的に移動させた距離の合計及び波形ガイドの移動方向をガイド制御部13へ通知する。
【0111】
一方、各波形ガイドが移動可能な範囲で波形ガイドの位置を変えても、何れかの指の仮想指紋範囲が指紋センサの撮影範囲に収まらない場合、位置判定部12は、波形ガイドを移動させても手が適切な位置とならないと判定する。そこで、上記のように、位置判定部12は、利用者の手と波形ガイドの両方を移動させることで利用者の手が適切な位置となるか否かを判定する。
【0112】
この場合、位置判定部12は、利用者の手を仮想的に所定の微小距離だけ縦方向に移動させることに対応して、各指の回転軸を縦方向にその微小距離だけ移動させる。一方、位置判定部12は、各波形ガイドを仮想的に所定の微小距離だけ横方向に移動させることに対応して、各指の固定点を横方向にその微小距離だけ移動させる。そして位置判定部12は、指ごとに、移動後の回転軸の位置を始点として、移動後の固定点を通り、かつ、手を仮想的に移動させる前の回転軸から指紋の存在範囲の重心までの線分と同一の長さを持つ線分の終点を、移動後の指紋の存在範囲の重心とする。
【0113】
位置判定部12は、静脈パターンの仮想存在範囲の上端または下端が静脈センサの撮影範囲の上端または下端と接するまで、所定の微小距離ずつ手を縦方向に仮想的に移動させる。また位置判定部12は、各波形ガイドが移動可能な範囲で、所定の微小距離ずつ各波形ガイドを横方向に仮想的に移動させる。そして手または波形ガイドをその微小距離だけ移動させる度に、位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まるか否か判定する。そして位置判定部12は、各指の仮想指紋範囲が指紋センサの撮影範囲に収まれば、波形ガイドと手の両方を移動することで手を適切な位置に置けると判定する。そして位置判定部12は、手を仮想的に移動させた距離の合計だけ、利用者の手を縦方向に移動させることを指示するガイドメッセージを表示部2に表示させる。また位置判定部12は、波形ガイドを仮想的に移動させた距離の合計及び波形ガイドの移動方向をガイド制御部13へ通知する。
【0114】
一方、静脈パターンの仮想存在範囲の上端または下端が静脈センサの撮影範囲の上端または下端と接するか、波形ガイドをどのように移動させても、何れかの指の仮想指紋範囲が指紋センサの撮影範囲に収まらないことがある。例えば、利用者の手が大きいことにより、何れかの指の指紋が指紋センサ41の撮影範囲の上端よりも上側に位置し、かつ、手のひらの静脈パターンの下端が静脈センサ42の撮影範囲の下端よりも下側に位置することがある。このような場合、位置判定部12は、利用者の手を適切に配置することができないと判定する。そして、位置判定部12は、範囲外れフラグを設定する。
【0115】
この第2の実施形態によれば、生体認証装置は、波形ガイド、各センサの撮影範囲及び指紋及び静脈の存在範囲の位置関係に基づいて、利用者の手または波形ガイドを仮想的に移動させたときの指紋及び静脈の存在範囲を推定する。そのため、この生体認証装置は、利用者の何れかの指の指紋の一部が生体画像に写っていない場合に、波形ガイドまたは利用者の手を移動することで手を適切な位置に配置できるか否かをより正確に判定できる。
【0116】
なお、変形例によれば、ガイド機構は、ガイド部材として、上記の波形ガイドの代わりに、指の腹の部分に沿うように横方向の断面が上方に凹状となるように形成された二つのガイドを有してもよい。
図12(a)は、指の先端側から見た、この変形例によるガイド部材の概略側面図であり、図12(b)は、この変形例によるガイド部材の概略平面図である。二つのガイド部材1201、1202の一方には人差し指を載せ、他方には薬指を載せるように、二つのガイド部材1201、1202は横方向に並べて配置される。この場合、ガイド部材1201、1202は、人差し指と薬指を固定できるので、ガイド部材1201、1202が移動することによって人差し指と薬指もガイド部材の移動量と同じ移動量だけ移動する。そのため、生体認証装置は、ガイド部材の位置を調節することによって利用者の手を適切な位置とする場合に、確実に利用者の手を適切な位置に配置できる。
【0117】
さらに他の変形例によれば、生体情報取得部のガイド機構は、ガイド部材を自動的に移動させるためのステッピングモータを有さなくてもよい。この場合には、利用者の手の移動に応じてガイド部材も移動する。また位置判定部は、ガイド部材を所定距離だけ移動することによって利用者の手を適切に配置できると判定した場合、そのガイド部材の移動方向及びその所定距離を表示部を介して利用者に通知する。
【0118】
さらに他の変形例によれば、生体情報取得部のガイド部材は、指の先端側に配置され、かつ、縦方向に沿って移動可能に保持されていてもよい。この変形例によれば、利用者は、指の先端をガイド部材に接するように手を置く。この場合も、位置判定部は、第1の生体画像から検出された隆線領域及び第2の生体画像から検出された静脈領域に基づいて、手の位置が適切か否か判定する。そして位置判定部は、手の位置が適切でない場合、ガイド部材と隆線領域及び静脈領域の位置間系に基づいて、手を適切に配置するための手の移動方向及びガイド部材の移動方向を求める。
【0119】
また他の変形例によれば、一つのイメージセンサによって指の生体情報と手のひらの生体情報を撮影してもよい。この場合には、例えば、指の先端側に位置するイメージセンサの撮影範囲の半分の領域が指の生体情報の撮影範囲となり、イメージセンサの撮影範囲の他の領域が手のひらの生体情報の撮影範囲となる。
【0120】
上記の各実施形態またはその変形例による生体認証装置は、コンピュータシステム及び入室管理システムといった、様々な用途に利用できる。
【0121】
図13は、上記の各実施形態またはその変形例による生体認証装置が実装された入室管理システムの概略構成図である。入室管理システム100は、ドア制御装置110と認証サーバ120とを有する。ドア制御装置110と認証サーバ120とは、通信ネットワーク130を介して接続される。ドア制御装置110は、所定の区画の入口(例えば、オフィスルームまたは建物の入口)に設置されたドア(図示せず)の開閉を制御する装置である。ドア制御装置110は、生体情報取得部111と、制御部112と、ドア駆動部113と、表示部114と、通信部115とを有する。
【0122】
生体情報取得部111は、上記の各実施形態またはその変形例による生体認証装置の生体情報取得部とすることができる。そして生体情報取得部111は、指紋を撮影した第1の生体画像と手のひらの静脈パターンを撮影した第2の生体画像を制御部112へ送る。
【0123】
制御部112は、一つまたは複数のプロセッサと、揮発性または不揮発性の半導体メモリと、周辺回路とを有する。そして制御部112は、上記の各実施形態またはその変形例による生体認証装置の処理部が有する被写体領域検出部、位置判定部、ガイド制御部及び照合用データ生成部を有する。制御部112が有するこれらの各部は、制御部112が有するプロセッサ上で実行されるプログラムにより実現される機能モジュールである。そして制御部112は、被写体領域検出部により各生体画像から隆線領域及び静脈領域を検出する。そして制御部112は、位置判定部により、隆線領域及び静脈領域に基づいて、利用者の手の位置が適切か否か判定する。そして制御部112は、利用者の手の位置が適切でなければ、表示部114に手の位置の修正を指示するガイドメッセージを表示させ、あるいはガイド制御部を介して生体情報取得部111が有するガイド部材の位置を調整する。
また制御部112は、利用者の手の位置が適切であれば、照合用データ生成部により、第1及び第2の生体画像から照合用データを生成する。そして制御部112は、照合用データを通信部115を介して認証サーバ120へ送信する。
【0124】
さらに制御部112は、認証サーバ120から、利用者が認証されたことを通知されると、ドア駆動部113にドアを開ける指示を通知する。また、制御部112は、認証サーバ120から、利用者が認証されなかったことを通知されると、表示部114に認証に失敗した旨のメッセージを表示させる。
【0125】
ドア駆動部113は、制御部112からの制御信号に応じて、ドアを開けるための駆動信号またはドアを閉じるためのを駆動信号を生成する回路である。そしてドア駆動部113は、その駆動信号をドアへ送ることにより、ドアを開閉させる。
【0126】
表示部114は、例えば、液晶ディスプレイを有する。そして表示部114は、制御部112から受け取ったメッセージを表示する。
通信部115は、ドア制御装置110と認証サーバ120とを通信可能に接続するインターフェース回路を有する。そして通信部115は、制御部111から受け取った照合用データを認証サーバ120へ送信する。また通信部115は、認証サーバ120から利用者が認証されたか否かを表す信号を受け取り、その信号を制御部111へ渡す。
【0127】
認証サーバ120は、ドア制御装置110から受け取った照合用データと、記憶部122に記憶されている登録利用者の照合用データとに基づいて生体認証処理を行い、利用者を認証するか否か判定する。
そのために、認証サーバ120は、通信部121と、記憶部122と、処理部123とを有する。
【0128】
通信部121は、認証サーバ120とドア制御装置110とを通信可能に接続するインターフェース回路を有する。そして通信部121は、ドア制御装置110から受け取った照合用データを処理部123へ渡す。また通信部121は、処理部123から利用者が認証されたか否かを表す信号を受け取り、その信号をドア制御装置110へ送信する。
【0129】
記憶部122は、半導体メモリ、磁気記録装置及び光記録装置のうちの少なくとも一つを有する。そして記憶部122は、一人以上の登録利用者の識別情報ととももに、その登録利用者の照合用データを記憶する。また記憶部122は、処理部123で実行されるプログラム及びそのプログラムで利用される各種のデータを記憶する。
【0130】
処理部123は、少なくとも一つのプロセッサと、揮発性または不揮発性の半導体メモリと、周辺回路とを有する。そして処理部123は、上記の各実施形態またはその変形例による生体認証装置の処理部が有する照合部、認証判定部及び登録部を有する。処理部123が有するこれらの各部は、処理部123が有するプロセッサ上で実行されるプログラムにより実現される機能モジュールである。
【0131】
処理部123は、照合部により、利用者の照合用データと登録利用者の照合用データに基づいて、利用者の指紋及び静脈パターンと登録利用者の指紋及び静脈パターンとの類似度を求める。そして処理部123は、認証判定部により、類似度に基づいて、利用者を認証するか否か判定し、その認証結果を表す信号を通信部121を介してドア制御装置110へ送信する。
【0132】
ここに挙げられた全ての例及び特定の用語は、読者が、本発明及び当該技術の促進に対する本発明者により寄与された概念を理解することを助ける、教示的な目的において意図されたものであり、本発明の優位性及び劣等性を示すことに関する、本明細書の如何なる例の構成、そのような特定の挙げられた例及び条件に限定しないように解釈されるべきものである。本発明の実施形態は詳細に説明されているが、本発明の精神及び範囲から外れることなく、様々な変更、置換及び修正をこれに加えることが可能であることを理解されたい。
以上説明した実施形態及びその変形例に関し、更に以下の付記を開示する。
(付記1)
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置であって、
前記利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサと、
前記利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサと、
前記利用者の指の位置を規制するガイド部材と、
前記第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出する被写体領域検出部と、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める位置判定部と、
を有する生体認証装置。
(付記2)
前記被写体領域検出部は、前記第2の生体画像上で手のひらの生体情報が写っている第2の被写体領域を検出し、
前記位置判定部は、前記第2の被写体領域に基づいて前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れているか否かを判定し、前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れている場合、前記ガイド部材の位置と前記第1の被写体領域から推定される前記指の生体情報の位置と前記第2の被写体領域から推定される前記手のひらの生体情報の位置間の関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、付記1に記載の生体認証装置。
(付記3)
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記第1の被写体領域から指の生体情報に外接する形状で近似することにより前記指の生体情報が存在する範囲を推定し、前記利用者の手を前記ガイド部材にて規制される方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、かつ、前記第2の被写体領域を前記ガイド部材にて規制される方向に沿って仮想的に前記所定距離だけ移動させても前記第2の被写体領域が前記第2のセンサの撮影範囲に収まる場合、前記ガイド部材により規制される方向を前記利用者の手の移動方向として表示部を介して前記利用者に提示する、付記2に記載の生体認証装置。
(付記4)
前記ガイド部材は、前記第1のセンサの撮影範囲と前記第2のセンサの撮影範囲の間に配置される、付記2または3に記載の生体認証装置。
(付記5)
前記ガイド部材は、前記利用者の一本の指を挟むように配置された第1の部材と第2の部材を有する、付記4に記載の生体認証装置。
(付記6)
前記ガイド部材は、前記利用者の指の幅方向に沿って移動可能であり、
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、前記ガイド部材の移動方向を前記利用者の手の移動方向とする、付記4または5に記載の生体認証装置。
(付記7)
前記位置判定部によって前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときに、前記指の生体情報が前記第1のセンサの撮影範囲内に収まると判定された場合に、前記指の幅方向に沿って前記所定距離だけ前記ガイド部材を移動させるガイド制御部をさらに有する、付記6に記載の生体認証装置。
(付記8)
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置における利用者の手の位置を調整する方法であって、
第1のセンサにより生成された、前記利用者の指の生体情報が写った第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出し、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記利用者の指の位置を規制するガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、
ことを含む手の位置の調整方法。
【符号の説明】
【0133】
1 生体認証装置
2 表示部
3 入力部
4 生体情報取得部
5 記憶部
6 処理部
11 被写体領域検出部
12 位置判定部
13 ガイド制御部
14 照合用データ生成部
15 登録部
16 照合部
17 認証判定部
100 入室管理システム
110 ドア制御装置
120 認証サーバ
130 通信ネットワーク
111 生体情報取得部
112 制御部
113 ドア駆動部
114 表示部
115 通信部
121 通信部
122 記憶部
123 処理部
【特許請求の範囲】
【請求項1】
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置であって、
前記利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサと、
前記利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサと、
前記利用者の指の位置を規制するガイド部材と、
前記第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出する被写体領域検出部と、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める位置判定部と、
を有する生体認証装置。
【請求項2】
前記被写体領域検出部は、前記第2の生体画像上で手のひらの生体情報が写っている第2の被写体領域を検出し、
前記位置判定部は、前記第2の被写体領域に基づいて前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れているか否かを判定し、前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れている場合、前記ガイド部材の位置と前記第1の被写体領域から推定される前記指の生体情報の位置と前記第2の被写体領域から推定される前記手のひらの生体情報の位置間の関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、請求項1に記載の生体認証装置。
【請求項3】
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記第1の被写体領域から指の生体情報に外接する形状で近似することにより前記指の生体情報が存在する範囲を推定し、前記利用者の手を前記ガイド部材にて規制される方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、かつ、前記第2の被写体領域を前記ガイド部材にて規制される方向に沿って仮想的に前記所定距離だけ移動させても前記第2の被写体領域が前記第2のセンサの撮影範囲に収まる場合、前記ガイド部材により規制される方向を前記利用者の手の移動方向として表示部を介して前記利用者に提示する、請求項2に記載の生体認証装置。
【請求項4】
前記ガイド部材は、前記第1のセンサの撮影範囲と前記第2のセンサの撮影範囲の間に配置される、請求項2または3に記載の生体認証装置。
【請求項5】
前記ガイド部材は、前記利用者の指の幅方向に沿って移動可能であり、
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、前記ガイド部材の移動方向を前記利用者の手の移動方向とする、請求項4に記載の生体認証装置。
【請求項6】
前記位置判定部によって前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときに、前記指の生体情報が前記第1のセンサの撮影範囲内に収まると判定された場合に、前記指の幅方向に沿って前記所定距離だけ前記ガイド部材を移動させるガイド制御部をさらに有する、請求項5に記載の生体認証装置。
【請求項7】
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置における利用者の手の位置を調整する方法であって、
第1のセンサにより生成された、前記利用者の指の生体情報が写った第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出し、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記利用者の指の位置を規制するガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、
ことを含む手の位置の調整方法。
【請求項1】
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置であって、
前記利用者の指の生体情報が写った第1の生体画像を生成する第1のセンサと、
前記利用者の手のひらの生体情報が写った第2の生体画像を生成する第2のセンサと、
前記利用者の指の位置を規制するガイド部材と、
前記第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出する被写体領域検出部と、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める位置判定部と、
を有する生体認証装置。
【請求項2】
前記被写体領域検出部は、前記第2の生体画像上で手のひらの生体情報が写っている第2の被写体領域を検出し、
前記位置判定部は、前記第2の被写体領域に基づいて前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れているか否かを判定し、前記手のひらの生体情報の少なくとも一部が前記第2のセンサの撮影範囲から外れている場合、前記ガイド部材の位置と前記第1の被写体領域から推定される前記指の生体情報の位置と前記第2の被写体領域から推定される前記手のひらの生体情報の位置間の関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、請求項1に記載の生体認証装置。
【請求項3】
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記第1の被写体領域から指の生体情報に外接する形状で近似することにより前記指の生体情報が存在する範囲を推定し、前記利用者の手を前記ガイド部材にて規制される方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、かつ、前記第2の被写体領域を前記ガイド部材にて規制される方向に沿って仮想的に前記所定距離だけ移動させても前記第2の被写体領域が前記第2のセンサの撮影範囲に収まる場合、前記ガイド部材により規制される方向を前記利用者の手の移動方向として表示部を介して前記利用者に提示する、請求項2に記載の生体認証装置。
【請求項4】
前記ガイド部材は、前記第1のセンサの撮影範囲と前記第2のセンサの撮影範囲の間に配置される、請求項2または3に記載の生体認証装置。
【請求項5】
前記ガイド部材は、前記利用者の指の幅方向に沿って移動可能であり、
前記位置判定部は、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときの当該存在範囲の仮想位置を求め、当該仮想位置における前記指の生体情報の存在範囲全体が前記第1のセンサの撮影範囲に収まる場合に、前記指の生体情報が前記第1のセンサの撮影範囲に収まると判定し、前記ガイド部材の移動方向を前記利用者の手の移動方向とする、請求項4に記載の生体認証装置。
【請求項6】
前記位置判定部によって前記ガイド部材を前記指の幅方向に沿って仮想的に所定距離だけ移動させたときに、前記指の生体情報が前記第1のセンサの撮影範囲内に収まると判定された場合に、前記指の幅方向に沿って前記所定距離だけ前記ガイド部材を移動させるガイド制御部をさらに有する、請求項5に記載の生体認証装置。
【請求項7】
利用者の指の生体情報及び手のひらの生体情報を、登録利用者の指の生体情報及び手のひらの生体情報と照合することにより、利用者を認証するか否かを判定する生体認証装置における利用者の手の位置を調整する方法であって、
第1のセンサにより生成された、前記利用者の指の生体情報が写った第1の生体画像上で指の生体情報が写っている第1の被写体領域を検出し、
前記第1の被写体領域に基づいて前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れているか否かを判定し、前記指の生体情報の少なくとも一部が前記第1のセンサの撮影範囲から外れている場合、前記利用者の指の位置を規制するガイド部材と前記第1の被写体領域から推定される前記指の生体情報間の位置関係に基づいて、前記指の生体情報が前記第1のセンサの撮影範囲に収まり、かつ前記手のひらの生体情報が前記第2のセンサの撮影範囲に収まるための前記利用者の手の移動方向を求める、
ことを含む手の位置の調整方法。
【図1】

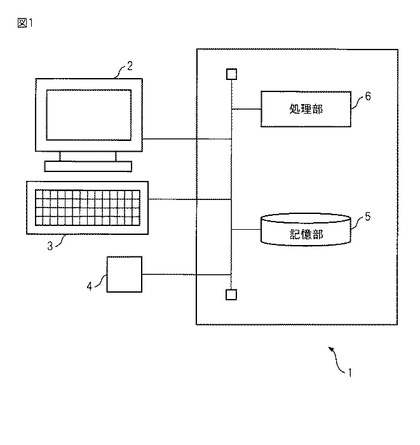
【図2】
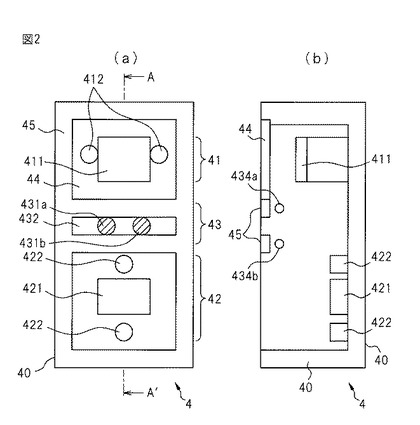
【図3】
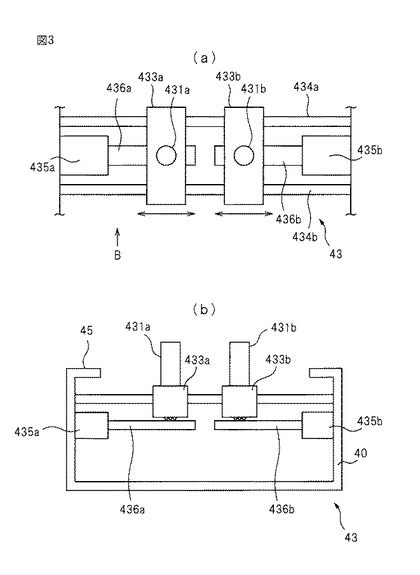
【図4】
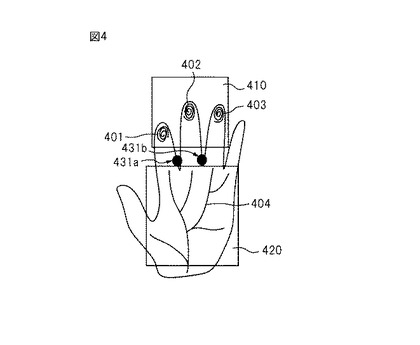
【図5】
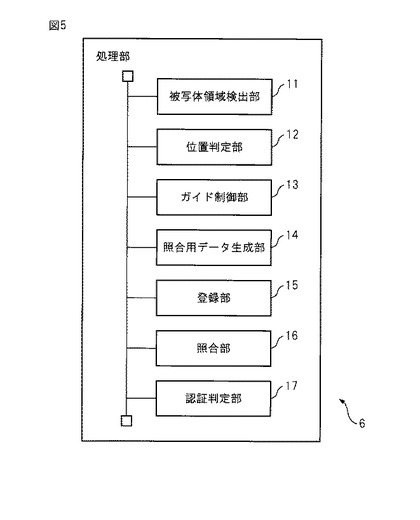
【図6】
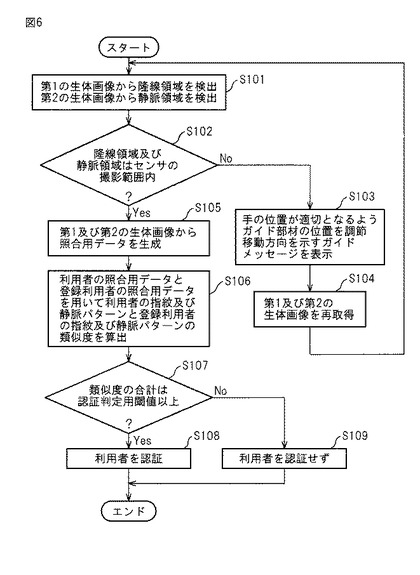
【図7】
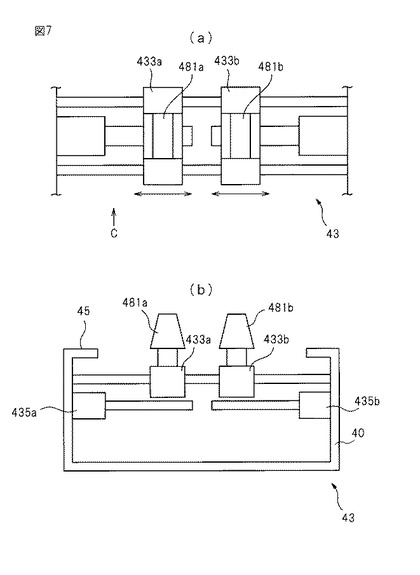
【図8】
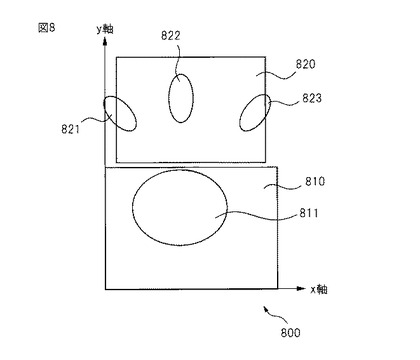
【図9】
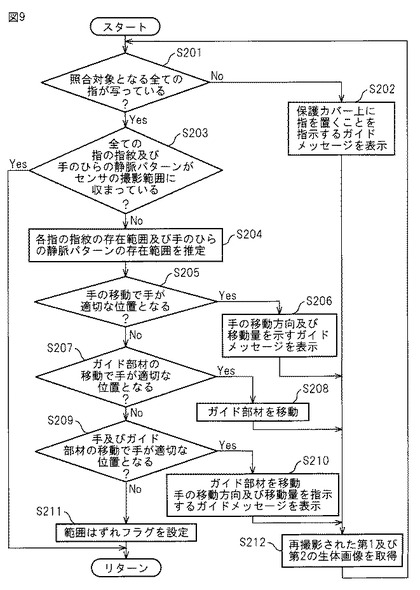
【図10】
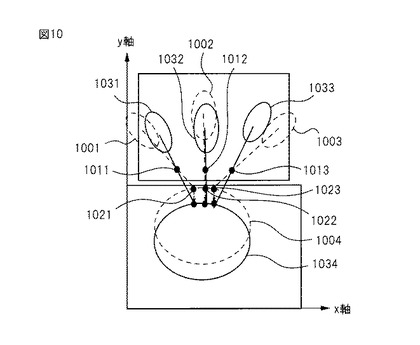
【図11】
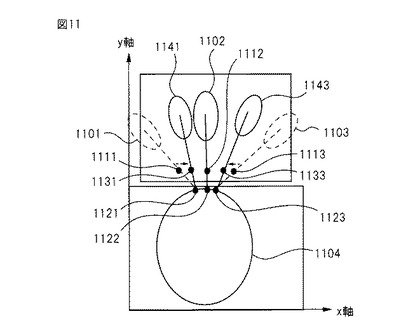
【図12】
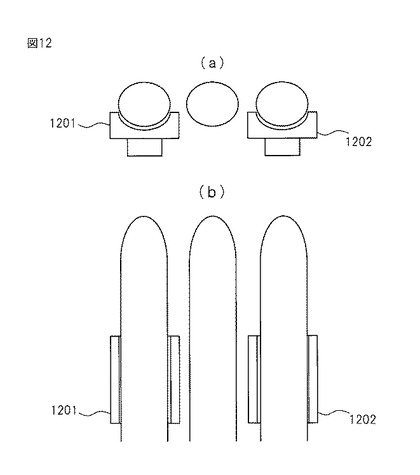
【図13】
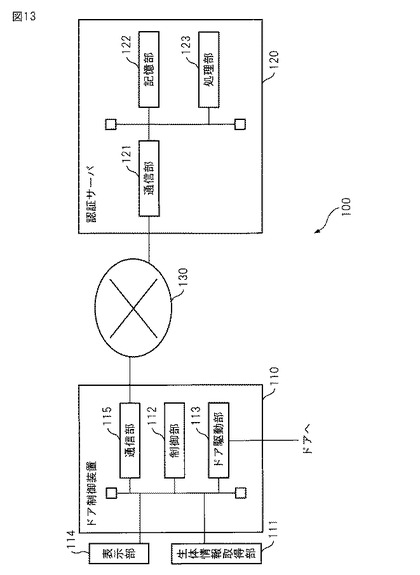
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−30099(P2013−30099A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−167223(P2011−167223)
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]