
生得の、もしくは人工の膝関節の動的緊張装置
【課題】生得のまたは人工の膝関節を動的に緊張させる装置に関する。
【解決手段】本装置は骨もしくは大腿骨移植組織片に対する、骨頭支持表面(20A)を持つ少なくとも1つの大腿骨インサート(8A)と、骨もしくは脛骨移植組織片に対する、脛骨板支持表面(24A)を持つ少なくとも1つの脛骨インサート(10A)と、膝蓋骨が適所にあるなしに関わらず大腿骨インサートと脛骨インサート間に一定の強さのディストラクション力を加える力導入手段(4A、30A)とを具備する。骨頭支持表面(20A)は皿形にされ、膝関節移動時の骨もしくは大腿骨移植片に対する滑動手段(12A)を具備する。
【解決手段】本装置は骨もしくは大腿骨移植組織片に対する、骨頭支持表面(20A)を持つ少なくとも1つの大腿骨インサート(8A)と、骨もしくは脛骨移植組織片に対する、脛骨板支持表面(24A)を持つ少なくとも1つの脛骨インサート(10A)と、膝蓋骨が適所にあるなしに関わらず大腿骨インサートと脛骨インサート間に一定の強さのディストラクション力を加える力導入手段(4A、30A)とを具備する。骨頭支持表面(20A)は皿形にされ、膝関節移動時の骨もしくは大腿骨移植片に対する滑動手段(12A)を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、膝のディストラクション(distraction)用の装置ともいわれる膝関節の動的緊張装置に関する。
【背景技術】
【0002】
膝の関節形成術の分野では、外科医は損傷したり不完全になった本来の膝の関節を人工の関節に置換しようと試みる。人工関節は安定した丈夫な痛みのない組織を形成しながら生得の関節の運動特性をできるだけ忠実に再現する。膝関節の柔軟な部分(被膜、靭帯、及び腱)は、関節を動かそうとする際これの機械的強さに関して重要な役割を演ずる。一方、これらの柔軟部分は各患者にとって固有のものであるが、病気の後などでは大なり少なり影響を受けがちである。さらに、人工膝の移植組織片を定置する際、外科医は多くの場合特定の靭帯を切除して新しい生体力学的環境を作り出す。
【0003】
したがって人工膝を植えつける際は、これらの柔軟部分の緊張を評価することが必要である。さらに、人工器具を可能最善に定置するために必要であればこれを修正することが必要である。より精しくいえば、所望の目的は膝の柔軟部分の、0と90°の屈曲に見合う緊張及び人工器具の全屈曲弧を通して維持される緊張と、十分な幾何学的整合と、屈曲(flexum)のない伸展とを達成して、直立姿勢での応力を最適化し患者の組織に対する可能最善な順応をもたらすことにある。重要な目的は適切な靭帯の均衡により優れたレベルの膝の安定を達成することにある。
【0004】
この目的のため、一般に柔軟部分を緊張させる装置が使用される。これは通常「テンソル」と呼ばれ、一般に大腿骨に対する2つの骨頭支持表面を持つ大腿骨インサートと、脛骨板に対する少なくとも1つの支持表面を持つ脛骨インサートと、大腿骨インサートと脛骨インサート間に所定の強さのディストラクション力を加える手段とを備えている。大腿骨と脛骨との相対位置を測定する周知の手段はこのテンソルと連動し、脛骨端部と大腿骨関節端部の空間にテンソルを導入することで、テンソルが加える選択された張力の値により、脛骨と大腿骨との間隔並びに角度HKAとを決めることができる。角度HKAとは、一方で伸展に関する、他方で90°の屈曲状態での、大腿骨の機械的軸線(臀部の中心と膝の中心とで規定される)と脛骨の機械的軸線(膝の中心と足首の中心とで規定される)間の内側で測った角度である。このようにして実行される測定に基づき、外科医は最も適した人工器具の構成要素を、特に彼の使用自由な要素一式から選択する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、この種のテンソルの使用は選択された人工要素の最適な選択及び/または定置を必ずしも保証するものではなく、特に膝の背部の柔軟部分が屈曲状態に収縮中に、また0と90°間の屈曲の中間段階で、並びに100°を超えたところで最適の生体力学を達成させないことが分かっている。最適の生体力学は運動の全ての区域における柔軟部分の「良好な緊張」に調和し、つまり支持領域の安定緊張と、20と140°間でのミクロレベルの前面及び回転の緩みの空隙とに調和して運動をし易くさせ、決して過度の緊張状態や過度もしくは不均衡な緩みはもたらさない。
【課題を解決するための手段】
【0006】
本発明の目的は柔軟部分の「良好な緊張」の連続的な、つまり膝関節のほぼ全体の屈曲径路にわたる調整を可能とすることにより上述した不都合を克服する緊張装置を提供することにある。
【0007】
このため本発明は、大腿骨の移植組織片もしくは骨に対する、骨頭支持表面を具えた少なくとも1つの大腿骨インサートと;脛骨の移植組織片もしくは骨に対する、脛骨板の支持表面を具えた少なくとも1つの脛骨インサートと;膝蓋骨が定位置にあるなしに関わらず大腿骨インサートと脛骨インサート間に所定の強さのディストラクション力を与える手段とを備えるタイプの、脛骨切断を実行するしないに関わらず生得のもしくは人工の膝関節の緊張装置を備えたタイプの、生得もしくは人工膝関節を動的に緊張させる装置に関する。本装置は関節の回転を可能にするように構築され、さらに回転中膝を緊張状態に維持する手段を備えており、こうしていろいろな回転角度に対する測定を実行することを特徴とする。
【0008】
本装置の、単独で取り上げた場合のあるいは技術的に可能な全ての組合せによるその他の特徴によれば、
骨頭支持表面は皿の形状をなし、膝関節移動時の大腿骨移植組織片もしくは骨に対する滑動手段を具備し、
滑動手段は並置されたローラーを具備し、
滑動手段は並置されたボールベアリングを具備し、
骨頭支持表面はほぼ円柱形をなし、ディストラクションの方向に対してほぼ横方向の軸線を持ち、
各大腿骨インサートと脛骨インサートとの最大厚さは2.5mm以下であり、
大腿骨インサートは、要すれば脛骨インサートも、膝関節の内側区画と外側区画とに設けられ、
本装置は骨頭支持表面と脛骨板支持表面との間隔を測定する手段を具備し、この手段は、膝関節の移動時の両支持表面間の間隔を連続的に測定することができ、
装置は大腿骨インサートと脛骨インサート間のディストラクション力を測定する手段を具備し、この手段は膝関節の移動時のディストラクション力の強さの、その所定の強さ辺りの変動を連続的に測定することができ、
ディストラクション力を与える手段は力発生装置と、力発生装置を大腿骨インサートと脛骨インサートとに接続する一対の枝管とを具備する。
【0009】
本発明は、単に例として供する以下の記述を図面を参照しながら読みとることによりよく理解されるだろう。
【発明を実施するための最良の形態】
【0010】
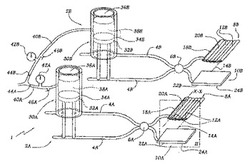
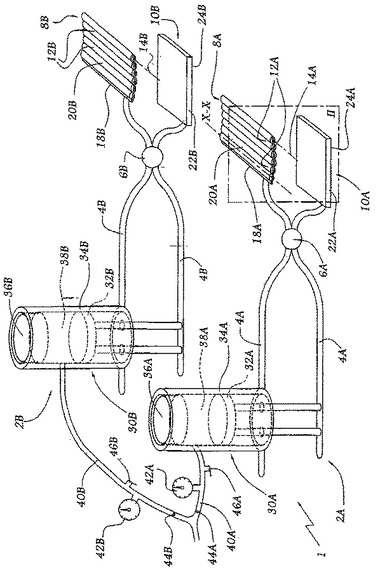
図1は膝関節を緊張させる装置1を示している。この装置1は実質的に2つの類似した組立構造体、つまり内側の大腿骨骨頭の領域での関節の内側区画に対する内側組立構造体2Aと、(外側の大腿骨骨頭の領域での)外側区画に対する外側組立構造体2Bとにより形成される。便宜のため、以下の全ての記述において装置は標準的関節を参照しながら記述し一般化する。用語の上方や頂部、下方や底部、前部や前方、背部や後方、並びに用語の内側及び外側はこの種類の関節の一般的記述に用いられる用語に対応する。
【0011】
さらに、内側組立構造体2Aと外側組立構造体2Bとは同じ要素を具備するから、内側組立構造体2Aの要素のみを以下に記述する。外側組立構造体2Bの対応する要素はBの続く同じ番号で示される。
【0012】
内側組立構造体2Aは概してペンチの形状をなし、枢軸6A周りに互いに対して関着された2つの枝管4Aを備えている。枝管4Aの遠位端部にはそれぞれインサート(金属もしくは非金属)、すなわち大腿骨の下方端部に特に骨頭に接触して配置するための大腿骨インサート8Aと、脛骨の上方端部に接触して配置するための脛骨インサート10Aとが設けられている。大腿骨インサートと脛骨インサートは互いに対して移動でき、特に枝管4Aの近位部分を接合すると関着軸6Aを中心とするほぼ円弧形の軌道にしたがって互いから遠ざかるのに適している。
【0013】
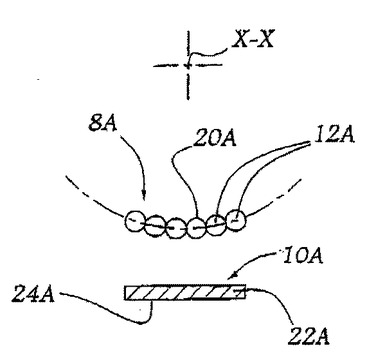
より精しくは図2に示したように、大腿骨のインサート8Aは概して柱体球欠の形状をなし、横方向に伸びる軸線X−Xを持つ。これは一連の並置されたローラー12Aを具備し、一連のローラー12Aは各軸線14A周りを自由に回転するように取り付けられ、さらに対応する枝管4Aに不動連結された共通の板18Aに例えば固定的に接合される。軸線14Aは軸線X−Xとほぼ平行に伸長する。インサート8Aはこうして皿の形の凹んだ上方表面20Aをもたらす。この表面20Aは大腿骨の内側骨頭の支持体を形成するためのものである。皿20Aの彎曲の半径は、この内側骨頭の球欠面の彎曲の平均半径に近似するように選択される。もちろん、ローラーは固定された支持表面と置換しても構わない。
【0014】
脛骨インサート10Aはそれ自身、大腿骨インサート8Aの外面寸法とほぼ同じ外面寸法を持つ板22Aを具備している。板22Aは大腿骨インサート8Aの軸線X−Xとほぼ平行な方向に広がっている。脛骨インサートは下側に、内側脛骨板を支持する表面24Aを具えている。内側脛骨板とはつまり大腿骨の内側骨頭に対する脛骨の上方端部の本来の内側上方表面、あるいは脛骨のこの端部に例えばのこぎりを使って生じさせたほぼ平坦な表面である。
【0015】
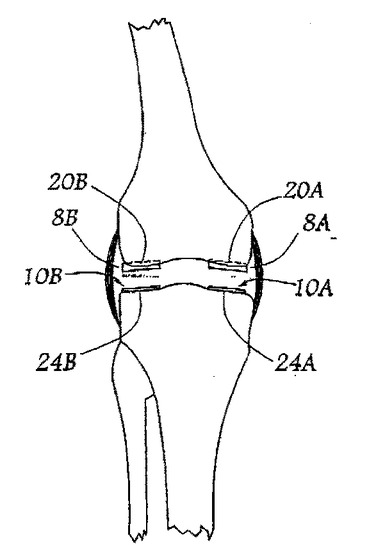
大腿骨インサート8A、8B、及び脛骨インサート10A、10Bは例えばそれぞれ2.5mmのオーダーの薄さにして大腿骨と脛骨間を滑動できるようにし、膝蓋骨を図3に示したように大腿骨切断の前に膝関節の各内側と外側の区画の領域で位置ずれ状態にないようにするのが有利である。インサートは枝管4A、4Bに対して移動でき、急速固定手段を用いてこれらの枝管に固定される。インサートはこうして骨頭の区画に定置される態勢となるが、装置の枝管にはまだ接続されない。
【0016】
内側組立構造体2Aの枝管4Aの近位端部は、これらの端部を接合しようとする力を発生させる装置30Aにより互いに接続される。より精しく述べれば発生装置30Aは、一方の枝管4Aに固定結合されたピストン32Aと、2つの枝管4Aの他方に固定結合された、ピストン32Aがその内側を移動できる柱体34Aとを具備する。柱体34Aの上方端部には封止閉塞体用のスクリュー36Aが設けられ、柱体の内壁とピストン32Aの頂部とで可変容積のチャンバ38Aを画成する。調整手段を具備した図示しない加圧流体源は、圧力計42Aと調整手段44A、46Aとを備えたコネクタ40Aを介してこのチャンバ38Aに接続される。このピストンとこの流体とで実行されるこのモーター作用は、変形において電気サーボモーターで実行することもできる。
【0017】
装置1は、図示しないが支持表面20A、20B、24A、24Bの間隔を側定する手段を具備するのが有利である。外科分野で周知のこれらの手段は例えば高鮮明度のデジタルカメラを備えている。カメラは赤外線放射源と連動し、赤外線放射を受動反射する一群の3つのマーカーがつけられた範囲をカバーする。この3つのマーカー群は外科医により関節の大腿骨部分か脛骨部分の一方に、例えば大腿骨の下方部分に置かれて3次元の表示方法を形成する。これによりカメラは、最初の3つのマーカーの基準系に対して移動できる骨部分に置かれた、例えば脛骨に置かれた1以上の補助マーカーの精確な幾何学的位置を従来の方法により決めることができる。外科医はこうして適当な計算手段を用いて、大腿骨に置かれた3つのマーカーの空間基準系に対する、脛骨の精確な位置、特に2つの骨の屈曲角度、これらの骨の間の間隔、横方向及び前後の変位、並びに関係回転とを判定することができる。
【0018】
以下緊張装置の操作を人工膝関節の定置に関連して説明する。
外科医は各サイズの一式の滅菌移植組織片を所持している。各移植組織片は従来から:脛骨棒と協働する基部で形成され基部を脛骨板の切断表面上に有効に封止する脛骨成分であって、基部に取り付けて人工脛骨関節表面を生じさせることのできる例えばポリエチレン製の脛骨板一式を、各種類の基部に対して具えた脛骨成分と、大腿骨骨髄管中に封止するための大腿骨棒と協働する遠位端部を備え、さらに脛骨板に関着されるための人工滑車成分を具えた大腿骨成分であって、この滑車成分が大腿骨遠位端部に直接固定接合されたり、あるいは他のモデルにおいては、例えば厚さ不定のシム一式からシムを介在させてこれに取り付けることのできる大腿骨成分と、を備えており、脛骨成分と大腿骨成分とは枢着手段により関節のように接合したり切り離されたりする。
【0019】
上に説明したようにいくつかの赤外線マーカーを設置したあと、大腿骨と脛骨との相当部位の解剖学的形状を得、上述した計算手段を用いてこれらの形状と寸法とを持つ精密な解剖学的モデルを獲得する。外科医は必要であれば欠陥のある脛骨板の切除を実行し、可動マーカーを使ってこの切断面の位置に印を付ける。
好ましくは操作中、計算手段が連続的に現行の屈曲と角度HKAとの値を提供し続けるのがよい。
【0020】
外科医は次に膝を例えば約20°の屈曲状態におき、緊張装置1を関節の内側に挿入する。支持表面20Aを大腿骨の内側の骨頭と接触して、もしくは少なくとも直面して設置し、また支持表面20Bを大腿骨の外側の骨頭と接触して、もしくは少なくとも直面して設置し、支持表面24A、24Bを本来の脛骨板あるいは切除後に得た脛骨板と接触して設置する。より精しく述べれば、例えば各骨頭区画に対して、第1のインサートを定置し次に膝蓋骨を反対側でずらしてから第2のインサートを定置する。
【0021】
力発生装置30A、30Bは付勢されて膝の内側区画と外側区画とを緊張状態に置く。各区画に対して所定の力が掛けられ、圧力計42A及び42Bにより調整される。赤外線マーカーは膝関節の大腿骨と脛骨との位置の開きが十分であることを外科医に確認させる。張力と開きの間隔とを同時に記録することで柔軟部分の最適な緊張をよりよく計算することができる。大腿骨脛骨の整合が十分でない場合は外科医は適当な靭帯を弛めたり締めたりして、大腿骨部分と脛骨部分を互いに進退させる。
【0022】
緊張装置1を適所に保持しながら、外科医は膝を異なった屈曲位置に動かし、これらの同じ測定を繰り返す。特に骨頭支持表面20A、20Bの凹型形状と滑動性とにより装置1は移動中の膝に対して安定化される。外科医は膝を例えば屈曲0°の領域、つまり伸展状態にする。外科医は連続的にかつ手術中に、支持表面20A、20B、24A、24Bにより掛けられる張力の下大腿骨部分と脛骨部分の開き関係が十分であることを確認する。
【0023】
換言すれば、関節の柔軟部分の屈曲運動と伸展運動中の長さつまり緊張を動的に検査することにより、これらの柔軟部分の、特に背部部分の収縮の診断を行うことができ、したがってこれら柔軟部分を開放したり締め付けたりする外科的動作の案内が可能となる。
【0024】
一方で、動的データの集積により解剖学的な骨頭回転の中心を決めることができるのは有利である。これらの知識は大腿骨移植組織片の最良の位置を決定するために必要である。人工装具の骨頭回転の中心が解剖学的回転の中心に対してずれて、すなわち偏心していれば、安定性は0と90°の屈曲では適正だが、中間の角度特に45°では弱まり、柔軟部分は、人工装具の中心が前か後ろ寄りに、すなわち近位方向か遠位方向へずれるのに応じて弛みすぎか締め付けすぎとなる。
【0025】
他方、伸展状態での大腿骨脛骨の整合は適正に測定され、柔軟部分は適正な緊張を得る。上述の計算手段に助けられる外科医は、本発明の装置を用いて膝の屈曲の0と120°の間の、さらには150°までものこの整合を動的に測定することができる。整合が十分でない場合は、柔軟部分を開放する外科的操作が行われ、手術時に本発明の装置を用いて調整される。
さらに、いったん膝の人工大腿骨関節を定置したら、本発明の装置により人工大腿骨脛骨の間隔を屈曲/伸展運動中に一定の圧力で決定することができる。患者はこうして外科的処置が適正に行われることを確信することができる。
【0026】
緊張装置1の他の使用法もまた考えることができる。
いったん装置を実際のもしくは人工の関節に定置し、所定の強さで緊張させると、外科医は関節の大腿骨部分と脛骨部分の動きにより生じる、初めに掛けられた圧力値を中心とする圧力の変動を検査することができる。これらの「反応」の変動は例えば圧力計42A、42Bやサーボモーターに接続されたセンサにより測定する。外科医はこうして、柔軟部分が関節の屈曲中に解剖学的に予見されたように振舞うことを連続的に確認する。これらの測定値を上述の計算手段に送信し計算手段が柔軟部分により掛けられた張力の精確な値を決めるのは有利である。
操作の開始時や操作中あるいは操作の終盤に、各組立構造体2A、2Bを独立に使用して各関節区画の動的振舞いを判定することができる。このようにして、各区画の振舞いの差異が、予知された解剖学的公差から外れれば、外科医は対応する内側や外側の靭帯部分を開放したり締め付けたりする調節を行う。
【0027】
さらに、上に詳しく述べた装置の種々の構成と変形も考えることができる。
滑りローラー12A、12Bは、骨頭表面を滑動させるために、自由に回転するように取り付けた一連の並置したボールベアリングや低摩擦係数を持つ滑らかな表面と取り替えることができる。
各力発生装置30A、30Bは、特有のかつ調節する力を持ち、さらに特有の一定の力を発生させ、また大腿骨部分と脛骨部分とが加える圧力の「反応」測定の場合は対応する力を測定することのできるサーボモーターや、形状記憶金属からなるコネクターと取り替えることができる。
2つの脛骨インサート10A、10Bは互いに不動接合されて単一の脛骨インサートを形成でき、各大腿骨インサートはそれぞれこの単一脛骨インサートに対して関着されるか、もしくは要すれば互いに不動接合され、および/または
各対の関着された枝管4A、4Bは、互いに対してほぼ平行な2つのアームと取り替えることができる。アームにはその遠位端部に関節内インサート8A、8Bが設けられ、これらの2つのアームは並進運動により互いに対して移動できる。これにより例えば2つのアーム間に介在するウォームを具えた機動化された組立体を使って関節内インサートの相対間隔がもたらされる。
【0028】
本発明の装置はまた大腿骨膝蓋骨関節の張筋としても使用することができる。大腿骨インサートは滑車表面に押し付けられ、脛骨インサートは膝蓋骨の内側表面に押し付けられる。さらに特に大腿骨インサートに滑車の表面を補完する凹型形状を与えることで、この目的に合ったインサートの寸法と形状とに備えることができる。また張筋のアームに組み付けたり取り外したりできるインサート一式を得ることもできる。
【図面の簡単な説明】
【0029】
【図1】本発明の緊張装置の斜視図である。
【図2】図1に示した面II−IIの断面図である。
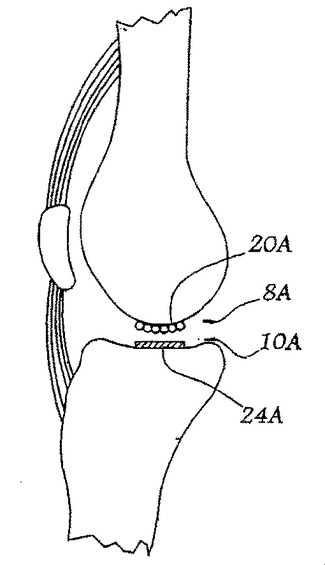
【図3】図1の装置の大腿骨インサートと脛骨インサートをその内側に設置した本来の膝関節の断面による略正面図である。
【図4】図3に対応する略側面図である。
【符号の説明】
【0030】
1 膝関節緊張装置
2A 内側組立構造体
2B 外側組立構造体
4A、4B 枝管
6A、6B 枢軸
8A、8B 大腿骨インサート
10A、10B 脛骨インサート
12A、12B 並置ローラー
14A 軸線
18A 共通板
20A、20B、24A、24B 支持表面
22A 板
30A、30B 力発生装置
32A ピストン
34A 柱体
36A スクリュー
38A チャンバ
40A コネクタ
42A、42B 圧力計
44A、46A 調節手段
【技術分野】
【0001】
本発明は、膝のディストラクション(distraction)用の装置ともいわれる膝関節の動的緊張装置に関する。
【背景技術】
【0002】
膝の関節形成術の分野では、外科医は損傷したり不完全になった本来の膝の関節を人工の関節に置換しようと試みる。人工関節は安定した丈夫な痛みのない組織を形成しながら生得の関節の運動特性をできるだけ忠実に再現する。膝関節の柔軟な部分(被膜、靭帯、及び腱)は、関節を動かそうとする際これの機械的強さに関して重要な役割を演ずる。一方、これらの柔軟部分は各患者にとって固有のものであるが、病気の後などでは大なり少なり影響を受けがちである。さらに、人工膝の移植組織片を定置する際、外科医は多くの場合特定の靭帯を切除して新しい生体力学的環境を作り出す。
【0003】
したがって人工膝を植えつける際は、これらの柔軟部分の緊張を評価することが必要である。さらに、人工器具を可能最善に定置するために必要であればこれを修正することが必要である。より精しくいえば、所望の目的は膝の柔軟部分の、0と90°の屈曲に見合う緊張及び人工器具の全屈曲弧を通して維持される緊張と、十分な幾何学的整合と、屈曲(flexum)のない伸展とを達成して、直立姿勢での応力を最適化し患者の組織に対する可能最善な順応をもたらすことにある。重要な目的は適切な靭帯の均衡により優れたレベルの膝の安定を達成することにある。
【0004】
この目的のため、一般に柔軟部分を緊張させる装置が使用される。これは通常「テンソル」と呼ばれ、一般に大腿骨に対する2つの骨頭支持表面を持つ大腿骨インサートと、脛骨板に対する少なくとも1つの支持表面を持つ脛骨インサートと、大腿骨インサートと脛骨インサート間に所定の強さのディストラクション力を加える手段とを備えている。大腿骨と脛骨との相対位置を測定する周知の手段はこのテンソルと連動し、脛骨端部と大腿骨関節端部の空間にテンソルを導入することで、テンソルが加える選択された張力の値により、脛骨と大腿骨との間隔並びに角度HKAとを決めることができる。角度HKAとは、一方で伸展に関する、他方で90°の屈曲状態での、大腿骨の機械的軸線(臀部の中心と膝の中心とで規定される)と脛骨の機械的軸線(膝の中心と足首の中心とで規定される)間の内側で測った角度である。このようにして実行される測定に基づき、外科医は最も適した人工器具の構成要素を、特に彼の使用自由な要素一式から選択する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、この種のテンソルの使用は選択された人工要素の最適な選択及び/または定置を必ずしも保証するものではなく、特に膝の背部の柔軟部分が屈曲状態に収縮中に、また0と90°間の屈曲の中間段階で、並びに100°を超えたところで最適の生体力学を達成させないことが分かっている。最適の生体力学は運動の全ての区域における柔軟部分の「良好な緊張」に調和し、つまり支持領域の安定緊張と、20と140°間でのミクロレベルの前面及び回転の緩みの空隙とに調和して運動をし易くさせ、決して過度の緊張状態や過度もしくは不均衡な緩みはもたらさない。
【課題を解決するための手段】
【0006】
本発明の目的は柔軟部分の「良好な緊張」の連続的な、つまり膝関節のほぼ全体の屈曲径路にわたる調整を可能とすることにより上述した不都合を克服する緊張装置を提供することにある。
【0007】
このため本発明は、大腿骨の移植組織片もしくは骨に対する、骨頭支持表面を具えた少なくとも1つの大腿骨インサートと;脛骨の移植組織片もしくは骨に対する、脛骨板の支持表面を具えた少なくとも1つの脛骨インサートと;膝蓋骨が定位置にあるなしに関わらず大腿骨インサートと脛骨インサート間に所定の強さのディストラクション力を与える手段とを備えるタイプの、脛骨切断を実行するしないに関わらず生得のもしくは人工の膝関節の緊張装置を備えたタイプの、生得もしくは人工膝関節を動的に緊張させる装置に関する。本装置は関節の回転を可能にするように構築され、さらに回転中膝を緊張状態に維持する手段を備えており、こうしていろいろな回転角度に対する測定を実行することを特徴とする。
【0008】
本装置の、単独で取り上げた場合のあるいは技術的に可能な全ての組合せによるその他の特徴によれば、
骨頭支持表面は皿の形状をなし、膝関節移動時の大腿骨移植組織片もしくは骨に対する滑動手段を具備し、
滑動手段は並置されたローラーを具備し、
滑動手段は並置されたボールベアリングを具備し、
骨頭支持表面はほぼ円柱形をなし、ディストラクションの方向に対してほぼ横方向の軸線を持ち、
各大腿骨インサートと脛骨インサートとの最大厚さは2.5mm以下であり、
大腿骨インサートは、要すれば脛骨インサートも、膝関節の内側区画と外側区画とに設けられ、
本装置は骨頭支持表面と脛骨板支持表面との間隔を測定する手段を具備し、この手段は、膝関節の移動時の両支持表面間の間隔を連続的に測定することができ、
装置は大腿骨インサートと脛骨インサート間のディストラクション力を測定する手段を具備し、この手段は膝関節の移動時のディストラクション力の強さの、その所定の強さ辺りの変動を連続的に測定することができ、
ディストラクション力を与える手段は力発生装置と、力発生装置を大腿骨インサートと脛骨インサートとに接続する一対の枝管とを具備する。
【0009】
本発明は、単に例として供する以下の記述を図面を参照しながら読みとることによりよく理解されるだろう。
【発明を実施するための最良の形態】
【0010】
図1は膝関節を緊張させる装置1を示している。この装置1は実質的に2つの類似した組立構造体、つまり内側の大腿骨骨頭の領域での関節の内側区画に対する内側組立構造体2Aと、(外側の大腿骨骨頭の領域での)外側区画に対する外側組立構造体2Bとにより形成される。便宜のため、以下の全ての記述において装置は標準的関節を参照しながら記述し一般化する。用語の上方や頂部、下方や底部、前部や前方、背部や後方、並びに用語の内側及び外側はこの種類の関節の一般的記述に用いられる用語に対応する。
【0011】
さらに、内側組立構造体2Aと外側組立構造体2Bとは同じ要素を具備するから、内側組立構造体2Aの要素のみを以下に記述する。外側組立構造体2Bの対応する要素はBの続く同じ番号で示される。
【0012】
内側組立構造体2Aは概してペンチの形状をなし、枢軸6A周りに互いに対して関着された2つの枝管4Aを備えている。枝管4Aの遠位端部にはそれぞれインサート(金属もしくは非金属)、すなわち大腿骨の下方端部に特に骨頭に接触して配置するための大腿骨インサート8Aと、脛骨の上方端部に接触して配置するための脛骨インサート10Aとが設けられている。大腿骨インサートと脛骨インサートは互いに対して移動でき、特に枝管4Aの近位部分を接合すると関着軸6Aを中心とするほぼ円弧形の軌道にしたがって互いから遠ざかるのに適している。
【0013】
より精しくは図2に示したように、大腿骨のインサート8Aは概して柱体球欠の形状をなし、横方向に伸びる軸線X−Xを持つ。これは一連の並置されたローラー12Aを具備し、一連のローラー12Aは各軸線14A周りを自由に回転するように取り付けられ、さらに対応する枝管4Aに不動連結された共通の板18Aに例えば固定的に接合される。軸線14Aは軸線X−Xとほぼ平行に伸長する。インサート8Aはこうして皿の形の凹んだ上方表面20Aをもたらす。この表面20Aは大腿骨の内側骨頭の支持体を形成するためのものである。皿20Aの彎曲の半径は、この内側骨頭の球欠面の彎曲の平均半径に近似するように選択される。もちろん、ローラーは固定された支持表面と置換しても構わない。
【0014】
脛骨インサート10Aはそれ自身、大腿骨インサート8Aの外面寸法とほぼ同じ外面寸法を持つ板22Aを具備している。板22Aは大腿骨インサート8Aの軸線X−Xとほぼ平行な方向に広がっている。脛骨インサートは下側に、内側脛骨板を支持する表面24Aを具えている。内側脛骨板とはつまり大腿骨の内側骨頭に対する脛骨の上方端部の本来の内側上方表面、あるいは脛骨のこの端部に例えばのこぎりを使って生じさせたほぼ平坦な表面である。
【0015】
大腿骨インサート8A、8B、及び脛骨インサート10A、10Bは例えばそれぞれ2.5mmのオーダーの薄さにして大腿骨と脛骨間を滑動できるようにし、膝蓋骨を図3に示したように大腿骨切断の前に膝関節の各内側と外側の区画の領域で位置ずれ状態にないようにするのが有利である。インサートは枝管4A、4Bに対して移動でき、急速固定手段を用いてこれらの枝管に固定される。インサートはこうして骨頭の区画に定置される態勢となるが、装置の枝管にはまだ接続されない。
【0016】
内側組立構造体2Aの枝管4Aの近位端部は、これらの端部を接合しようとする力を発生させる装置30Aにより互いに接続される。より精しく述べれば発生装置30Aは、一方の枝管4Aに固定結合されたピストン32Aと、2つの枝管4Aの他方に固定結合された、ピストン32Aがその内側を移動できる柱体34Aとを具備する。柱体34Aの上方端部には封止閉塞体用のスクリュー36Aが設けられ、柱体の内壁とピストン32Aの頂部とで可変容積のチャンバ38Aを画成する。調整手段を具備した図示しない加圧流体源は、圧力計42Aと調整手段44A、46Aとを備えたコネクタ40Aを介してこのチャンバ38Aに接続される。このピストンとこの流体とで実行されるこのモーター作用は、変形において電気サーボモーターで実行することもできる。
【0017】
装置1は、図示しないが支持表面20A、20B、24A、24Bの間隔を側定する手段を具備するのが有利である。外科分野で周知のこれらの手段は例えば高鮮明度のデジタルカメラを備えている。カメラは赤外線放射源と連動し、赤外線放射を受動反射する一群の3つのマーカーがつけられた範囲をカバーする。この3つのマーカー群は外科医により関節の大腿骨部分か脛骨部分の一方に、例えば大腿骨の下方部分に置かれて3次元の表示方法を形成する。これによりカメラは、最初の3つのマーカーの基準系に対して移動できる骨部分に置かれた、例えば脛骨に置かれた1以上の補助マーカーの精確な幾何学的位置を従来の方法により決めることができる。外科医はこうして適当な計算手段を用いて、大腿骨に置かれた3つのマーカーの空間基準系に対する、脛骨の精確な位置、特に2つの骨の屈曲角度、これらの骨の間の間隔、横方向及び前後の変位、並びに関係回転とを判定することができる。
【0018】
以下緊張装置の操作を人工膝関節の定置に関連して説明する。
外科医は各サイズの一式の滅菌移植組織片を所持している。各移植組織片は従来から:脛骨棒と協働する基部で形成され基部を脛骨板の切断表面上に有効に封止する脛骨成分であって、基部に取り付けて人工脛骨関節表面を生じさせることのできる例えばポリエチレン製の脛骨板一式を、各種類の基部に対して具えた脛骨成分と、大腿骨骨髄管中に封止するための大腿骨棒と協働する遠位端部を備え、さらに脛骨板に関着されるための人工滑車成分を具えた大腿骨成分であって、この滑車成分が大腿骨遠位端部に直接固定接合されたり、あるいは他のモデルにおいては、例えば厚さ不定のシム一式からシムを介在させてこれに取り付けることのできる大腿骨成分と、を備えており、脛骨成分と大腿骨成分とは枢着手段により関節のように接合したり切り離されたりする。
【0019】
上に説明したようにいくつかの赤外線マーカーを設置したあと、大腿骨と脛骨との相当部位の解剖学的形状を得、上述した計算手段を用いてこれらの形状と寸法とを持つ精密な解剖学的モデルを獲得する。外科医は必要であれば欠陥のある脛骨板の切除を実行し、可動マーカーを使ってこの切断面の位置に印を付ける。
好ましくは操作中、計算手段が連続的に現行の屈曲と角度HKAとの値を提供し続けるのがよい。
【0020】
外科医は次に膝を例えば約20°の屈曲状態におき、緊張装置1を関節の内側に挿入する。支持表面20Aを大腿骨の内側の骨頭と接触して、もしくは少なくとも直面して設置し、また支持表面20Bを大腿骨の外側の骨頭と接触して、もしくは少なくとも直面して設置し、支持表面24A、24Bを本来の脛骨板あるいは切除後に得た脛骨板と接触して設置する。より精しく述べれば、例えば各骨頭区画に対して、第1のインサートを定置し次に膝蓋骨を反対側でずらしてから第2のインサートを定置する。
【0021】
力発生装置30A、30Bは付勢されて膝の内側区画と外側区画とを緊張状態に置く。各区画に対して所定の力が掛けられ、圧力計42A及び42Bにより調整される。赤外線マーカーは膝関節の大腿骨と脛骨との位置の開きが十分であることを外科医に確認させる。張力と開きの間隔とを同時に記録することで柔軟部分の最適な緊張をよりよく計算することができる。大腿骨脛骨の整合が十分でない場合は外科医は適当な靭帯を弛めたり締めたりして、大腿骨部分と脛骨部分を互いに進退させる。
【0022】
緊張装置1を適所に保持しながら、外科医は膝を異なった屈曲位置に動かし、これらの同じ測定を繰り返す。特に骨頭支持表面20A、20Bの凹型形状と滑動性とにより装置1は移動中の膝に対して安定化される。外科医は膝を例えば屈曲0°の領域、つまり伸展状態にする。外科医は連続的にかつ手術中に、支持表面20A、20B、24A、24Bにより掛けられる張力の下大腿骨部分と脛骨部分の開き関係が十分であることを確認する。
【0023】
換言すれば、関節の柔軟部分の屈曲運動と伸展運動中の長さつまり緊張を動的に検査することにより、これらの柔軟部分の、特に背部部分の収縮の診断を行うことができ、したがってこれら柔軟部分を開放したり締め付けたりする外科的動作の案内が可能となる。
【0024】
一方で、動的データの集積により解剖学的な骨頭回転の中心を決めることができるのは有利である。これらの知識は大腿骨移植組織片の最良の位置を決定するために必要である。人工装具の骨頭回転の中心が解剖学的回転の中心に対してずれて、すなわち偏心していれば、安定性は0と90°の屈曲では適正だが、中間の角度特に45°では弱まり、柔軟部分は、人工装具の中心が前か後ろ寄りに、すなわち近位方向か遠位方向へずれるのに応じて弛みすぎか締め付けすぎとなる。
【0025】
他方、伸展状態での大腿骨脛骨の整合は適正に測定され、柔軟部分は適正な緊張を得る。上述の計算手段に助けられる外科医は、本発明の装置を用いて膝の屈曲の0と120°の間の、さらには150°までものこの整合を動的に測定することができる。整合が十分でない場合は、柔軟部分を開放する外科的操作が行われ、手術時に本発明の装置を用いて調整される。
さらに、いったん膝の人工大腿骨関節を定置したら、本発明の装置により人工大腿骨脛骨の間隔を屈曲/伸展運動中に一定の圧力で決定することができる。患者はこうして外科的処置が適正に行われることを確信することができる。
【0026】
緊張装置1の他の使用法もまた考えることができる。
いったん装置を実際のもしくは人工の関節に定置し、所定の強さで緊張させると、外科医は関節の大腿骨部分と脛骨部分の動きにより生じる、初めに掛けられた圧力値を中心とする圧力の変動を検査することができる。これらの「反応」の変動は例えば圧力計42A、42Bやサーボモーターに接続されたセンサにより測定する。外科医はこうして、柔軟部分が関節の屈曲中に解剖学的に予見されたように振舞うことを連続的に確認する。これらの測定値を上述の計算手段に送信し計算手段が柔軟部分により掛けられた張力の精確な値を決めるのは有利である。
操作の開始時や操作中あるいは操作の終盤に、各組立構造体2A、2Bを独立に使用して各関節区画の動的振舞いを判定することができる。このようにして、各区画の振舞いの差異が、予知された解剖学的公差から外れれば、外科医は対応する内側や外側の靭帯部分を開放したり締め付けたりする調節を行う。
【0027】
さらに、上に詳しく述べた装置の種々の構成と変形も考えることができる。
滑りローラー12A、12Bは、骨頭表面を滑動させるために、自由に回転するように取り付けた一連の並置したボールベアリングや低摩擦係数を持つ滑らかな表面と取り替えることができる。
各力発生装置30A、30Bは、特有のかつ調節する力を持ち、さらに特有の一定の力を発生させ、また大腿骨部分と脛骨部分とが加える圧力の「反応」測定の場合は対応する力を測定することのできるサーボモーターや、形状記憶金属からなるコネクターと取り替えることができる。
2つの脛骨インサート10A、10Bは互いに不動接合されて単一の脛骨インサートを形成でき、各大腿骨インサートはそれぞれこの単一脛骨インサートに対して関着されるか、もしくは要すれば互いに不動接合され、および/または
各対の関着された枝管4A、4Bは、互いに対してほぼ平行な2つのアームと取り替えることができる。アームにはその遠位端部に関節内インサート8A、8Bが設けられ、これらの2つのアームは並進運動により互いに対して移動できる。これにより例えば2つのアーム間に介在するウォームを具えた機動化された組立体を使って関節内インサートの相対間隔がもたらされる。
【0028】
本発明の装置はまた大腿骨膝蓋骨関節の張筋としても使用することができる。大腿骨インサートは滑車表面に押し付けられ、脛骨インサートは膝蓋骨の内側表面に押し付けられる。さらに特に大腿骨インサートに滑車の表面を補完する凹型形状を与えることで、この目的に合ったインサートの寸法と形状とに備えることができる。また張筋のアームに組み付けたり取り外したりできるインサート一式を得ることもできる。
【図面の簡単な説明】
【0029】
【図1】本発明の緊張装置の斜視図である。
【図2】図1に示した面II−IIの断面図である。
【図3】図1の装置の大腿骨インサートと脛骨インサートをその内側に設置した本来の膝関節の断面による略正面図である。
【図4】図3に対応する略側面図である。
【符号の説明】
【0030】
1 膝関節緊張装置
2A 内側組立構造体
2B 外側組立構造体
4A、4B 枝管
6A、6B 枢軸
8A、8B 大腿骨インサート
10A、10B 脛骨インサート
12A、12B 並置ローラー
14A 軸線
18A 共通板
20A、20B、24A、24B 支持表面
22A 板
30A、30B 力発生装置
32A ピストン
34A 柱体
36A スクリュー
38A チャンバ
40A コネクタ
42A、42B 圧力計
44A、46A 調節手段
【特許請求の範囲】
【請求項1】
大腿骨移植組織片もしくは骨に対する骨頭支持表面(20A)を具えた少なくとも1つの大腿骨インサート(8A)と、脛骨移植組織片もしくは骨に対する脛骨板の支持表面(24A)を具えた少なくとも1つの脛骨インサート(10A)と、膝蓋骨が定位置にあるなしに関わらず大腿骨インサートと脛骨インサート間に所定の強さのディストラクション力を加える手段(4A、30A)とを備えたタイプの、脛骨切断の実行の有無に関わらず生得の、もしくは人工の膝関節を動的に緊張させる装置において、本装置は関節の回転を可能にするように構築され、さらに回転中に膝を緊張状態に維持する手段を具備して、いろいろな回転角度に対する測定を実行することを特徴とする装置。
【請求項2】
請求項1に記載の装置において、骨頭支持表面(20A)は皿の形状をなすことを特徴とする装置。
【請求項3】
請求項1あるいは2のいずれかに記載の装置において、骨頭支持表面(20A)は、膝関節移動時の大腿骨移植組織片もしくは骨に対する滑動手段を具備することを特徴とする装置。
【請求項4】
請求項3に記載の装置において、滑動手段は並置されたローラー(12A)を具備することを特徴とする装置。
【請求項5】
請求項3あるいは4のいずれかに記載の装置において、滑動手段は並置されたボールベアリングを具備することを特徴とする装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の装置において、骨頭支持表面(20A)はほぼ円柱形をなし、ディストラクションの方向に対してほぼ横方向の軸線(X−X)を持つことを特徴とする装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の装置において、各大腿骨インサート(8A、8B)と脛骨インサート(10A、10B)の最大厚さは2.5mm以下であることを特徴とする装置。
【請求項8】
請求項1乃至7のいずれか1項に記載の装置において、大腿骨インサート(8A、8B)は、要すれば脛骨インサート(10A、10B)も、膝関節の各内側区画と外側区画とに備え付けられることを特徴とする装置。
【請求項9】
請求項1乃至8のいずれか1項に記載の装置において、本装置は骨頭支持表面(20A)と脛骨板支持表面(24A)との間隔を測定する手段を備え、この手段が膝関節の移動時の両支持表面間の間隔を連続的に測定することができることを特徴とする装置。
【請求項10】
請求項1乃至9のいずれか1項に記載の装置において、本装置は大腿骨インサート(8A)と脛骨インサート(12A)間のディストラクション力を測定する手段を備え、この手段が膝の移動時のディストラクション力の強さの、その所定の強さを中心とする変動を連続的に測定することができることを特徴とする装置。
【請求項11】
請求項1乃至10のいずれか1項に記載の装置において、ディストラクション力を加える手段は力発生装置(30A)と、発生装置を大腿骨インサート(8A)及び脛骨インサート(12A)とに接続する一対の枝管とを具備することを特徴とする装置。
【請求項1】
大腿骨移植組織片もしくは骨に対する骨頭支持表面(20A)を具えた少なくとも1つの大腿骨インサート(8A)と、脛骨移植組織片もしくは骨に対する脛骨板の支持表面(24A)を具えた少なくとも1つの脛骨インサート(10A)と、膝蓋骨が定位置にあるなしに関わらず大腿骨インサートと脛骨インサート間に所定の強さのディストラクション力を加える手段(4A、30A)とを備えたタイプの、脛骨切断の実行の有無に関わらず生得の、もしくは人工の膝関節を動的に緊張させる装置において、本装置は関節の回転を可能にするように構築され、さらに回転中に膝を緊張状態に維持する手段を具備して、いろいろな回転角度に対する測定を実行することを特徴とする装置。
【請求項2】
請求項1に記載の装置において、骨頭支持表面(20A)は皿の形状をなすことを特徴とする装置。
【請求項3】
請求項1あるいは2のいずれかに記載の装置において、骨頭支持表面(20A)は、膝関節移動時の大腿骨移植組織片もしくは骨に対する滑動手段を具備することを特徴とする装置。
【請求項4】
請求項3に記載の装置において、滑動手段は並置されたローラー(12A)を具備することを特徴とする装置。
【請求項5】
請求項3あるいは4のいずれかに記載の装置において、滑動手段は並置されたボールベアリングを具備することを特徴とする装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の装置において、骨頭支持表面(20A)はほぼ円柱形をなし、ディストラクションの方向に対してほぼ横方向の軸線(X−X)を持つことを特徴とする装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の装置において、各大腿骨インサート(8A、8B)と脛骨インサート(10A、10B)の最大厚さは2.5mm以下であることを特徴とする装置。
【請求項8】
請求項1乃至7のいずれか1項に記載の装置において、大腿骨インサート(8A、8B)は、要すれば脛骨インサート(10A、10B)も、膝関節の各内側区画と外側区画とに備え付けられることを特徴とする装置。
【請求項9】
請求項1乃至8のいずれか1項に記載の装置において、本装置は骨頭支持表面(20A)と脛骨板支持表面(24A)との間隔を測定する手段を備え、この手段が膝関節の移動時の両支持表面間の間隔を連続的に測定することができることを特徴とする装置。
【請求項10】
請求項1乃至9のいずれか1項に記載の装置において、本装置は大腿骨インサート(8A)と脛骨インサート(12A)間のディストラクション力を測定する手段を備え、この手段が膝の移動時のディストラクション力の強さの、その所定の強さを中心とする変動を連続的に測定することができることを特徴とする装置。
【請求項11】
請求項1乃至10のいずれか1項に記載の装置において、ディストラクション力を加える手段は力発生装置(30A)と、発生装置を大腿骨インサート(8A)及び脛骨インサート(12A)とに接続する一対の枝管とを具備することを特徴とする装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2007−501039(P2007−501039A)
【公表日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願番号】特願2006−522369(P2006−522369)
【出願日】平成16年7月29日(2004.7.29)
【国際出願番号】PCT/FR2004/002046
【国際公開番号】WO2005/018509
【国際公開日】平成17年3月3日(2005.3.3)
【出願人】(506016820)デュプイ (アイルランド) リミテッド (3)
【Fターム(参考)】
【公表日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願日】平成16年7月29日(2004.7.29)
【国際出願番号】PCT/FR2004/002046
【国際公開番号】WO2005/018509
【国際公開日】平成17年3月3日(2005.3.3)
【出願人】(506016820)デュプイ (アイルランド) リミテッド (3)
【Fターム(参考)】
[ Back to top ]