
生物試料を処理するための装置
先ず、生物試料受容用容器を取り扱うためのグリッパーユニットが提案される。容器は、開放位置および閉鎖位置を取ることが可能な蓋を有する。グリッパーユニットは、容器を把捉し、解除するためのグリッパー、および、容器に対して定められた位置に蓋を保持するための蓋ホールダーを含む。この定められた位置は、蓋の開放位置である。
【発明の詳細な説明】
【技術分野】
【0001】
本出願は、試料、好ましくは生物試料を処理するための装置に関する。本出願はさらに、遠心機、特に、生物試料を遠心するための遠心機または装置、および、遠心機において生物試料を遠心するための方法、または、遠心ユニットにおいて生物試料を処理するための方法に関する。本出願はさらに、生体分子、特に、サンプル流体の生体分子を自動的に処理するための装置に関する。
【0002】
本出願はさらに、容器、特に、生物試料を受容するための容器を取り扱うためのグリッパーユニット、そのような容器を把捉および/または解除するためのグリッパー、および、そのような容器のための容器ホールダーに関する。本出願はさらに、容器、特に、生物試料を受容するための容器を、好ましくはグリッパーを用いて把捉するための方法、および、そのような容器を、好ましくはグリッパーを用いて解除するための方法に関する。
【0003】
本出願はさらに、容器を輸送するための方法、好ましくは、容器ホールダーの中に、または、容器ホールダーから外へ容器を輸送するための方法に関する。特に、本出願は、特にグリッパーユニットを用いて、容器を容器ホールダーから、好ましくは遠心ローターの容器ホールダーから取り出すための方法、容器を容器ホールダーに設置するための類似方法に関する。本出願はさらに、容器を移送するための方法、特に、グリッパーユニットを用いて、第1容器ホールダーから第2容器ホールダーへ容器を移送するための方法、あるいは、グリッパーを用いて、遠心ローターの容器ホールダーの第1保持位置から、遠心ローターの容器ホールダーの第2保持位置へ容器を移送するための方法に関する。
【0004】
本出願はさらに、遠心機の遠心ローターの位置決めをするための方法、特に、遠心ローターの回転軸周囲における回転角度について遠心ローターの位置決めをするための方法に関する。本出願はさらに、容器ホールダー、特に、生物試料受容用容器の容器ホールダーの変位角度の位置決めをするための方法に関する。
【0005】
本出願はさらに、遠心機を冷却するための方法に関する。
【0006】
本出願はさらに、容器用ホールダーにおける、容器、特に、生物試料を受容するための容器の有無を検出するための方法に関する。本出願はさらに、容器における物質の表面の高さを定量するための方法、および、容器、特に、生物試料を受容するための容器の性質を検出するための方法、もっとも特異的には、容器用コンテナステーションにおける容器の性質を検出するための方法に関する。本出願はさらに、遠心機の占拠をチェックするための方法、および、サンプル処理装置の占拠をチェックするための方法に関する。
【背景技術】
【0007】
化学、生物学、医学、または環境科学などの数多くの技術分野において、例えば、生物試料(例えば、流体)を分析し、処理し、または反応させることが必要となる。このために、流体または試料が、様々な方法によって、ろ過され、冷却され、加熱され、その構成成分に分解され、洗浄され、またはピペット転送され、あるいは、他のやり方で処理される。生物試料を調製するためには、しばしば、長い、複雑な、一連の処理工程を経ることが必要である。さらに、多くの場合、異なる試料から成る大規模な収集物を、同じ順序に従って処理しなければならないか、あるいは、同じ試料から成る一連のものを平行的に処理しなければならないことがある。これは、時間がかかり、処理能力を制限し、かつ、操業停止を招きやすい。
【0008】
生物試料の処理は、例えば、核酸またはタンパクなどの生体分子の抽出および/または精製の分野で使用される。例えば、生体分子を精製するための、ある周知の方法は、生物サンプルの内容物に対するアクセスを実現する(「分解」)こと、固相支持体または担体試料に対し生物サンプルの内容物の構成成分を選択的に結合させること、固相支持体または担体試料から不溶の成分を排除すること(「洗浄」)、および、所望の構成成分を溶解すること(「溶出」)から成る諸工程に基づく。
【0009】
生体分子の精製時、所望の吸収および脱離を可能とするために、例えば、シリカゲルから形成されるフィルター要素であって、一方では、液体が、そのフィルター要素を通過することを可能とするために多孔性または基質様でありながら、他方では、分子が、特異的、または非特異的方法において結合する表面を持つ、特別なフィルター要素が開発されている。別の精製方法では、生体分子は、単に、サイズ排除の作用によってフィルター要素に保持される。例えば、核酸などの生体分子を含む液体がこのフィルター要素を通過すると、生体分子またはその一部は、いずれにしろフィルター要素に保持されるが、一方、残余は、フィルター要素を通過する。
【0010】
さらに、フィルター要素から生体分子を獲得するには、該生体分子を脱離するために、ヌクレアーゼ無添加水などの溶出液を、フィルター要素の上に通過させる。このようにして、所望の生体分子は、フィルター要素から放出され(溶出され)、容器の中に捕捉される。このようなフィルター要素は、入力開口と出力開口を有する個々の容器に配置されるか、あるいは、マルチウェル・プレートに配置される膜としばしば表示される。これらのフィルター要素は、遠心(スピン方式)によって、または、真空技術に基づく装置を用いて処理される。膜を有し、かつ、遠心機においても使用することが可能な入力開口および出力開口を有する個々の容器は、カラム、遠心カラム、フィルター容器、クロマトグラフィーカラム、カラム、スピンカラム、または単一スピンカラムの形状としても知られる。
【0011】
一般に、真空法に優る遠心方法の利点は、純度がより高いこと、濃度がより高いこと、および、クロスコンタミネーションの危険度がより低いことである。一般に、品質および濃度の点から見て、生体分子精製の最良結果は、高い重力野(>10,000xg)の下で処理される遠心カラム(単一スピンチューブ)によって獲得される。なぜなら、これによって、クロスコンタミネーションが最小とされ、膜からの所望物質の回収が最大とされるからである。しかしながら、一つの欠点は、遠心カラムの手間のかかる手動処置であり、これが、エラーの危険度および処理時間を、特に様々のサンプルを同時に処置または処理しなければらならない場合、増す。マルチウェルプレート方式を用いることによって、より高度の標準化および自動化のみならず、より高速の全体処理も実現される。しかしながら、これは、品質および/または量に関する妥協を含む。
【0012】
QIAGENは、「結合−洗浄−溶出」手順の基本原理に基づいて、ある範囲の生物サンプルから得られた様々な生体分子に対し、広範な精製手順および必要製品を提供する。このために、様々なフィルター試料および装備が、例えば、特許文献1または特許文献2に記載の通りに使用される。市販の製品”QIAGEN QIAprep Spin Miniprep Kit”は、例えば、典型的な精製配列を開示し、いくつかの試薬およびバッファーと共に遠心機において使用される2mlの収集容器を供給する。
【0013】
生物試料の処理という主題に関してはいくつかの公刊物がある。例えば、特許文献3は、自動化遠心装置を含む、サンプル処理用自動化システムを開示する。特許文献4は、複数の収集容器が、直接アクセス用担体ウィールに位置決めされる、血液用収集システムを記載する。特許文献5は、例えば、核酸などの生物試料を含む液を、一般遠心機において自動的に遠心するための自動化遠心システムを記載する。特許文献6は、流体サンプルを処理するための装置を記載する。特許文献7は、遠心カラムが、自動化ルーティングシステムによって活性化される、遠心負荷用自動化装置を記載する。特許文献8は、反応容器について使用される化学的マニピュレータを記載する。特許文献9は、回転コンテナを囲む保護的ジャケットを有する遠心機を記載する。
【特許文献1】WO03/040364
【特許文献2】US6,277,648
【特許文献3】US6,060,022
【特許文献4】US5,166,889
【特許文献5】US2004/0002415
【特許文献6】WO2005/019836
【特許文献7】WO00/38046
【特許文献8】EP122772
【特許文献9】GB2235639
【発明の開示】
【発明が解決しようとする課題】
【0014】
既存の自動化システムの一つの欠点は、それらのシステムのサポートする方法が、高品質標準の遠心カラムを与えないこと、および、同時にほとんどまたは全く手動の介入が無い場合には機能することができないことである。
【課題を解決するための手段】
【0015】
本発明は、前述の課題の内のいくつかを解決するために出発する。この目的は、請求項1によるグリッパーユニットによって、請求項5および10による容器を輸送および移送ための方法によって、請求項16および56による容器ホールダーによって、請求項19、20、21、22、40、51、60、69、および76による、生物試料の処理装置によって、請求項31から33による容器の設置、排除、および移送のための方法によって、請求項47および55による位置決めのための方法によって、請求項67による容器の有無を検出するための方法によって、請求項87による容器の性質を検出するための方法によって、および、請求項89による遠心機の占拠をチェックするための方法によって達成される。
【0016】
本発明の、さらに別の利点、特質、局面、および詳細、および、本発明の好ましい実施態様および特定局面は、付属の特許請求の範囲、説明、および図面から明らかになるであろう。
【0017】
本発明の一局面では、生物試料を受容するための容器を操作するためのグリッパーユニットが提案される。この容器は、開放位置および閉鎖位置を占拠することが可能な蓋を有する。グリッパーユニットは、容器を把捉し、かつ解除するためのグリッパー、および、容器に対し定められた位置に蓋を保持するための蓋ホールダーを有する。定められた位置は、蓋の開放位置である。
【0018】
さらに、生物試料を処理するための装置が提案される。この装置は、グリッパーユニットおよび遠心機を含む。グリッパーユニットのグリッパーは、遠心機に容器を設置するか、または遠心機から容器を排除するのに好適である。
【0019】
さらに、容器を容器ホールダーの中へ、または容器ホールダーから容器を輸送するための方法が提案される。容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを介して容器を把捉するか、または保持すること;容器に対し蓋を定められた位置に保持すること;および、容器に対する蓋の定められた位置を保有しながら、グリッパーユニットを介して、容器を容器ホールダーの中へ、または容器ホールダーから容器を輸送することから成る諸工程を含む。
【0020】
さらに、グリッパーユニットを用いて容器ホールダーから容器を排除するための方法が提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを介して容器を把捉すること;容器に対し蓋を定められた位置に保持すること;および、容器に対する蓋の定められた位置を保有しながら、グリッパーユニットを用いて、容器ホールダーから把捉された容器を排除することから成る諸工程を含む。
【0021】
さらに、グリッパーユニットを用いて容器ホールダーの中に容器を設定するための方法が提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを介して容器を保持すること;容器に対し蓋を定められた位置に保持すること;および、容器に対する蓋の定められた位置を保有しながら、グリッパーを用いて、容器ホールダーの中に保持された容器を設置、または挿入することから成る諸工程を含む。方法は、任意に、グリッパーによって容器を解除することから成る追加工程を含む。
【0022】
さらに、グリッパーユニットを用いて、第1容器ホールダーの第1保持位置から、第2容器ホールダーの第2保持位置へ容器を移送するための方法が提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを用いて、第1保持位置にある容器を把捉すること;容器に対し蓋を定められた位置に保持すること;グリッパーを介して、第1容器ホールダー、または第1保持位置から、把捉された容器を排除すること;グリッパーを用いて、第2容器ホールダーまたは第2保持位置の中に把捉された容器を挿入することから成る諸工程を含む。排除および挿入工程では、容器に対する蓋の定められた位置が維持される。方法は、任意に、グリッパーによって容器を解除することから成る追加工程を含む。
【0023】
さらに、生物試料受容用容器のための容器ホールダーが提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この容器ホールダーは、遠心機において使用するのに好適であり、容器を保持するための、少なくとも一つの保持部材、および、該容器に付着する蓋を保持するための、少なくとも一つの蓋受容体を含む。受容体は、容器用グリッパーユニットの蓋ホールダーによる蓋へのアクセスを可能とする形状を持つ。
【0024】
さらに、遠心機において使用されることを意図される容器ホールダー、および遠心機を含む、生物試料を処理するための装置が提案される。
【0025】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、生物試料用容器を保持するための、少なくとも一つの容器ホールダーを有する、回転可能な遠心ローター、および、容器ホールダーに容器を挿入するためのグリッパーである。
【0026】
さらに、下記の部分を有する、生物試料を処理するための装置が提案される。部分は、生物試料用容器を保持するための、少なくとも一つの容器ホールダーを有する、回転可能な遠心ローター、および、容器ホールダーから容器を排除するためのグリッパーである。
【0027】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、生物試料用容器を保持するための、少なくとも一つの容器ホールダーを有する、回転可能な遠心ローター、および、容器ホールダーの第1保持位置から第2保持位置へ、容器を移送するためのグリッパーである。
【0028】
さらに、グリッパーを介して、遠心ローターの容器ホールダーに容器を設置するための方法が提案される。その際、容器ホールダーは、容器用の保持位置を有する。方法は下記の諸工程を含む。すなわち、グリッパーは、保持位置に対しある相対的位置に置かれること;グリッパーは、保持位置に容器を設置するために移動させられること;容器はグリッパーによって解除されること、である。
【0029】
さらに、グリッパーを用いて、遠心ローターの容器ホールダーから容器を排除するための方法が提案される。その際、容器ホールダーは、容器のための保持位置を有する。方法は下記の諸工程を含む。すなわち、グリッパーは、保持位置に対しある相対的位置に置かれること;容器は、グリッパーによって把捉されること;グリッパーは、保持位置から容器を排除するために移動させられること、である。
【0030】
さらに、グリッパーを介して、遠心ローターの、容器の、第1保持位置から、遠心ローターの、容器の、第2保持位置へ容器を移送するための方法が提案される。方法は下記の諸工程を含む。すなわち、グリッパーは、第1保持位置に対しある相対的位置に置かれること;容器は、グリッパーによって把捉されること;グリッパーは、第1保持位置から容器を排除するために移動させられること;グリッパーは、第2保持位置に対しある相対的位置に置かれること;グリッパーは、第2保持位置に容器を設置するために移動させられること;容器はグリッパーによって解除されること、である。
【0031】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、回転軸の周囲に回転が可能な遠心ローター、遠心ローターのための駆動部、および、ローターと同時回転することが可能なカウンター位置決め要素との相互作用によって、遠心ローターの角度位置を位置決めするための、ローターと共時回転しない位置決め要素である。
【0032】
さらに、遠心ローターの回転軸の周囲の、ある角度回転において遠心機の遠心ローターを位置決めするための方法が提案される。方法は下記の諸工程を含む。すなわち、遠心ローターと共時回転することが可能な、カウンター位置決め要素は、遠心ローターと共時回転しない、位置決め要素と相互作用を持つための動作範囲に置かれること;および、遠心ローターは、位置決め要素の、カウンター位置決め要素との相互作用によって位置決めされること、である。
【0033】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、回転軸の周囲に回転が可能であり、生物試料受容用容器を回旋軸的に登載するのに好適な遠心ローター、容器ホールダーの回旋運動の第1ストップ、および、容器ホールダーのカウンター位置決め要素との相互作用によって、ある変位角においてストップに対し容器ホールダーを保持するのに好適な位置決め要素である。
【0034】
さらに、遠心ローターに回旋軸的に登載される、生物試料受容用容器ホールダーの変位角を位置決めするための方法が提案される。方法は下記の諸工程を含む。すなわち、位置決め要素は、容器ホールダーのカウンター位置決め要素と相互作用させられること;容器ホールダーは、容器ホールダーの回旋運動に対するストップと接触すること;容器ホールダーの変位角は、位置決め要素とカウンター位置決め要素との相互作用によってストップに位置決めされること、である。
【0035】
さらに、生物試料受容用容器の容器ホールダーが提案される。容器ホールダーは、遠心機に使用するのに好適であり、容器を保持するための保持部材、および、位置決め要素と嵌合するような形状を持つカウンター位置決め要素を含む。この嵌合のために、遠心機における、容器ホールダーの角度位置および/または変位角を位置決めすることが可能である。現実のストップは、一般に、容器ホールダーが挿入される遠心機カップに登載される。
【0036】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、認識性を向上させた少なくとも一つの容器部分を有する、生物試料受容用容器のホールダー;認識性を向上させた容器部分と連結する、ホールダーの記録区域に照射するための放射線源;記録区域からの放射線強度を測定するためのセンサー;および、測定された強度を、定められた閾値と比較することによって、容器の有無を記録するように設計される評価ユニットである。
【0037】
さらに、容器用ホールダーにおける生物試料受容用容器の有無を検出するための方法が提案される。方法は、下記の諸工程を含む。すなわち、認識性を向上させた容器部分と連結する、ホールダーの記録区域が照射されること;記録区域からの放射線の強度が測定されること;容器の有無が、測定された強度と、定められた閾値との間の比較によって記録されること、である。
【0038】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、生物試料用容器を受容するための容器ホールダー;超音波源および超音波センサーを有するセンサーユニット;超音波センサーのセンサーデータの関数として容器の開放状態を決め、かつ、超音波センサーのセンサーデータの関数として、容器開放下に、容器における物質の可能な存在を決めるための評価ユニットである。
【0039】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、補給分の容器を保持するためのコンテナステーション;容器の性質に関する情報を含む、コンテナステーションにおけるマーキング;および、マーキングを読み取るための放射線センサーである。
【0040】
さらに、容器のコンテナステーションにおける生物試料受容用容器の性質を検出するための方法が提案される。方法は、下記の諸工程を含む。すなわち、容器の性質に関する情報を含む、コンテナステーションにおける第1マーキングが照射されること;および、第1マーキングからの放射線の第1強度が測定されること;容器の性質が、測定される第1強度の関数として記録されること、である。
【0041】
さらに、それぞれが、一生物試料用容器のために意図される、複数の、容器保持位置を含む、遠心機の占拠をチェックする方法が提案される。方法は下記の諸工程を含む。すなわち、容器保持位置について、その中に容器が存在するかどうかが記録されること;容器保持位置に存在すると記録された容器の全数が保存されること;容器保持位置に存在すると記録された容器の全数に応じて、容器保持位置に容器を分配するための少なくとも一つの条件が決められること;容器保持位置に存在すると記録された容器の分配が、該条件と合致するかどうかについてチェックが行われること、である。
【0042】
さらに、本発明は、開示される方法を実行するための装置に関し、かつ、個々の方法工程を実行するための装置の部分も含む。これらの方法工程は、ハードウェア成分によって、適切なソフトウェアを用いるコンピュータプログラムによって、前記二者の組み合わせによって、あるいは、他の任意のやり方によって実行してよい。さらに、本発明は、前述の装置が動作する方法もその主題とする。本発明は、装置の各機能を実行するための方法工程を含む。
【発明を実施するための最良の形態】
【0043】
本発明を例示するためのいくつかの実施態様が、図面に示され、かつ、以下により詳細に説明される。
基本概念
以下に記載される生物試料を処理するための装置は、生物試料を処理するための方法、または手順工程の効率的稼動を可能にするか、または支援する。装置は、下記の有用局面の内の一つ以上を履行することが好ましい。
【0044】
一有用局面は、遠心機内部において方法工程の内のいくつかを、かつ、特異的に試料の遠心そのものだけでなく、遠心をまったく含まない他の工程を稼動することである。遠心機においてこのような方法工程を実行することは、例えば、試料用容器のホールダーとしての遠心装置が、さらに、他の手順工程にも効率的に使用が可能となるという利点を持つ。同時に、ある場合、遠心機の外部の対応装備無しで済ますことが可能となる。同時に、試料の、遠心機への、および遠心機からの移送が低減される。同時に、移動距離が短縮される。その結果、時間の節約が可能となり、クロス・コンタミネーションの危険の最小化が可能となる。
【0045】
さらに、遠心機における手順工程を実行するために、遠心機における位置から試料を排除し、遠心機における位置に試料を導入し、または、遠心機内の異なる位置の間で試料を移送することは有用である。このために、特に、試料を輸送する二つの方法が利用可能である。
【0046】
第一に、試料が液体である場合、ピペット転送することが可能である。このために、装置は、ピペット転送ユニット(例えば、図7参照)を有してもよい。第二に、試料を含む容器は輸送されてもよい。このような容器は、望みのものであれば、どのような型式のものであってもよい。容器は、カラム、例えば、遠心カラム、すなわち、単一スピンカラム、あるいは、反応または収集容器、例えば、エッペンドルフチューブ、または類似の容器、例えば、蓋付き、または蓋無しのプラスチック容器であってもよい。遠心機内部の第1位置から、遠心機内部または外部の第2位置へ、この種の容器を転換するために、装置は、例えば、容器のための可動性グリッパーを有していてもよい。
【0047】
試料を輸送するための、これらの、および類似の方法は、場合によっては遠心機を使用することなく履行してもよい。
【0048】
図示の実施態様とは独立に、グリッパーのいくつかの局面が提案される。すなわち、生物試料受容用容器を把捉し、解除するために好適なグリッパーが提案される。このようなグリッパーは、容器を把捉し、解除するために移動が可能なグリップ要素、グリップ要素を締めつけるのに好適なクランプ要素、リフト要素、および、リフト要素の上昇移動を駆動し、それによってグリップ要素を移動させる、リフト要素用の駆動部を含む。
【0049】
クランプ要素は、任意に、グリップ要素を開放方向において締めつけるために好適となっていてもよい。もう一つの任意の選択肢として、リフト要素の上昇移動は、グリップ要素を閉鎖方向に移動させる。別態様として、クランプ要素は、グリップ要素を閉鎖方向に締めつけるのに好適である。さらに別の任意の選択肢として、リフト要素の上昇移動は、グリップ要素を開放方向に移動する。
【0050】
さらに、クランプ要素は、任意に、容器を解除するために、グリップ要素を締めつけるのに好適である。さらに別の選択肢として、リフト要素の上昇移動は、容器を把捉するためにグリップ要素を移動する。別態様として、クランプ要素は、容器を把捉するためにグリップ要素を締めつけるのに好適である。さらに別の選択肢として、リフト要素の上昇移動は、容器を解除するためにグリップ要素を移動する。
【0051】
通常、グリップ要素は、容器の頸部に嵌合するのに好適な陥凹を持つ。グリップ要素は、任意に、第1グリップ要素であり、さらにグリッパーは、第1グリップ要素と類似の性質を持つ、第2グリップ要素を持つ。さらに、グリッパーを、ピボット軸の周囲に回旋軸的に登載することが可能である。この場合、グリップ要素は、通常、容器のために中心軸を定め、ピボット軸は、中心軸とは異なる。
【0052】
さらに、グリッパーを用いて生物試料受容用容器を把捉するための方法が提案される。方法は下記の諸工程を含む。すなわち、リフト要素の上昇運動を生成すること;リフト要素の上昇運動を、閉鎖方向に向かう、あるいは、容器を把捉するための、グリップ要素の運動に転換すること、その際、運動は、クランプ要素が、グリップ要素に及ぼす力に対して反対方向であり;および、グリップ要素を用いて容器を把捉すること、から成る工程である。別態様として、容器を把捉するために、例えば、グリッパーが、容器の内部に向けられた容器表面において容器を把捉する場合、リフト要素の上昇運動も、開放方向に向かうグリップ要素の運動に転換される。
【0053】
さらに、グリッパーを介する、生物試料受容用容器を解除するための方法が提案される。この方法は、下記の諸工程を含む。すなわち、リフト要素の上昇運動を生成し、それによって開放方向へのグリップ要素の運動を可能とすること、クランプ要素を介して容器を解除するために、開放方向へ向かうグリップ要素の運動を産生すること、および、グリップ要素を介して容器を解除すること、から成る工程である。別態様として、リフト要素の上昇運動はまた、容器の解除が、クランプ要素によって生成されるようにするために、閉鎖方向に向かうグリップ要素の運動を可能としてもよい。
【0054】
さらに、生物試料を受容するための容器を取り扱うためのグリッパーユニットが提案される。グリッパーユニットは、下記の部分を含む。z方向に動くことが可能なグリッパー部材、および、第1位置から第2位置へグリッパー部材に対して動くことが可能な、容器把捉用グリッパー、および、第1位置から第2位置へグリッパーを動かすためのドライブである。
【0055】
グリッパーユニットは、任意に、容器を、別の容器に挿入するように設計されてもよい。ドライブは、任意に、電気ドライブである。第1位置から第2位置へのグリッパーの動きは、任意に、z方向以外の方向において起こる。第1位置から第2位置へのグリッパーの動きは、任意に、z方向に垂直な方向において起こる。第1位置から第2位置へのグリッパーの動きは、任意に、回旋軸の周囲の回旋運動である。回旋軸は、任意に、z方向に平行に延びる。
【0056】
さらに、サンプル試料、好ましくはサンプル液から得られる生体分子を自動的に処理するための装置が提案される。装置は下記の要素を含む。先ず、それぞれが、フィルター容器を脱離可能に受容し保持するための少なくとも一つの第1開口;および、別の、任意に密封される容器を脱離可能に受容し保持するための少なくとも一つの第2開口を含む、複数のコンテナを保持し、回転するためのローターを含む遠心機;および、前記第1開口から前記フィルター容器を排除するための手段;前記フィルター容器を前記別の容器と組み合わせる手段であって、組み合わせを、二つの容器が、遠心機と共に回転可能となるように、かつ、フィルター容器の容量と別容器の間に液的接続が与えられるように行う手段、である。
【0057】
取り扱いユニットは、任意に、前記第1開口から、前記第2開口に付着する前記別容器へと運ぶための手段を含む。さらに、取り扱いユニットは、任意に、前記フィルター容器または前記密封容器と同軸である、容器の中心線の周囲に、前記フィルター容器または前記別容器を回転させるための手段を含む。前記第1開口から前記第1容器を排除するための手段は、任意に、前記密封容器から前記フィルター容器を同軸方向に分離するための第1モーターを含む。前記別容器の上に前記フィルター容器を設置するための手段は、任意に、前記フィルター容器を前記別容器に運ぶための少なくとも一つの第2モーターを含む。
【0058】
さらに、生物試料保持用容器を取り扱うためのグリッパーユニットが提案される。この容器は、開放位置および閉鎖位置を占拠することが可能な蓋を持つ。グリッパーユニットは、容器を把捉し、解除するためのグリッパー、および、容器に対し定められた位置に蓋を保持するための蓋ホールダーを含む。定められた位置は、蓋の開放位置である。
【0059】
さらに、前述のグリッパーユニットを含むシステムが提案される。システムは、その上に、遠心機を含み、グリッパーは、遠心機に容器を挿入するのに、または遠心機から容器を排除するのに好適である。
【0060】
容器は、任意に、プラスチックで製造される。蓋は、任意に、容器に付着される。グリッパーユニットは、任意に、作業プレートの平面に対して垂直なz方向に、または、作業プレートの平面にそったx−y方向に可動である。容器は、任意に、円形断面、好ましくは、2cm、1cm未満の直径を持つ円形断面を持つ。蓋は、任意に、容器の開口を閉鎖するのに好適である。蓋は、任意に、コネクターを介して容器に接続される。グリッパーは、任意に、容器がグリッパーによって把捉される時、それを通じて蓋のコネクターを通過させることが可能な陥凹を有するグリップ要素を持つ。蓋ホールダーは、任意に、蓋のための機械的ストップを含む。蓋は、コネクターによって機械的ストップに押しつけられる。グリップ要素は、任意に、容器を把捉し、解除するために動くことが可能である。容器ホールダーは、任意に、液体を処理するためのデバイスである。蓋ホールダーは、グリップ要素が容器を摘みあげた場合、蓋ホールダーが、蓋にそって滑走またはガイドされるように任意に構成される。任意に、取り扱いは容器を容器ホールダーに設置することを含み、容器ホールダーは蓋受容体を有し、および、蓋ホールダーは、設置プロセス時、蓋受容体に蓋を設置するのに好適である。任意に、取り扱いは、容器ホールダーから容器を排除することを含み、容器ホールダーは蓋受容体を有し、かつ、蓋受容体は、設置プロセス時、蓋受容体に蓋を設置するのに好適である。任意に、取り扱いは、容器ホールダーから容器を排除し、容器ホールダーは蓋ホールダーを有し、かつ、蓋ホールダーは、排除プロセス時、蓋受容体から蓋を排除することが可能である。蓋受容体および蓋ホールダーは、任意に、容器に対し蓋の同じ位置を定める。
【0061】
さらに、容器ホールダーの中に、または容器ホールダーから容器を輸送するための方法が提案される。容器は、該容器の開口を閉鎖するために付着した蓋を含む。方法は、グリッパーユニットを介して容器を把捉または保持すること;容器に対して定められた位置に蓋を保持すること;および、容器に対し蓋の定められた位置を保持しながら、グリッパーユニットを用いて容器ホールダーの中へ、または容器ホールダーから容器を動かすこと、から成る諸工程を含む。
【0062】
容器を輸送するための方法は、任意に、グリッパーユニットを用いて容器ホールダーから容器を排除するための工程であり、一方、容器ホールダーの中に、または容器ホールダーから容器を動かす工程は、グリッパーによる容器ホールダーからの容器の排除である。任意に、容器ホールダーから容器を排除する工程は、容器ホールダーの蓋受容体から蓋を排除することを含む。任意に、容器ホールダーは、容器の蓋のための蓋受容体を有し、次に、容器ホールダーから容器を排除する工程は、容器に対する蓋の定められた位置を保持しながら、蓋受容体から蓋を排除することを含む。
【0063】
任意に、容器を輸送するための方法は、グリッパーユニットを用いて容器ホールダーの中に容器を設置するための方法であり、一方、容器ホールダーの中に、または容器ホールダーから容器を動かす工程は、容器ホールダーの中に容器を設置または挿入することを含む。任意に、容器ホールダーの中に容器を設置または挿入する工程は、容器ホールダーの蓋受容体の中に蓋を挿入することを含む。任意に、蓋を保持する工程では、蓋は、グリッパーユニットの蓋ホールダーによって容器に対して定められた位置に保持される。任意に、容器を設置するために、容器は、グリッパーユニットによって解除される。容器は、任意に、円形断面、好ましくは、2cmまたは1cm未満の直径を持つ円形断面を持つ。
【0064】
任意に、容器ホールダーは、容器の蓋のための蓋受容体を持ち、次に、容器ホールダーに容器を挿入する工程は、容器に対する蓋の定められた位置を維持しながら、蓋受容体の中に蓋を挿入することを含む。
【0065】
さらに、グリッパーユニットを用いて第1容器ホールダーから第2容器ホールダーへ容器を輸送するための方法が提案される。該方法は、先行パラグラフに記載されるように、第1容器ホールダーから、または、第1容器ホールダーの第1保持位置から、容器を排除すること、および、先行パラグラフに記載されるように、第2容器ホールダーの中に、または、第2容器ホールダーの第2保持位置の中に容器を挿入することから成る工程を含む。特に、容器は、第1容器ホールダーの第1保持位置から、第2容器ホールダーの第2容器保持位置へ移送される。第1および第2保持位置は、一般的に異なる。第1保持位置および第2保持位置は、同じ容器ホールダー内にあってもよいし、または、異なる容器ホールダー内にあってもよい。
【0066】
さらに、容器の開口を閉鎖するために、蓋を付着させた、生物試料受容用容器のための容器ホールダーが提案される。容器ホールダーは、遠心機において使用するのに好適であり、容器を保持するための少なくとも一つの保持部材、および、容器に付着させた蓋を保持するための少なくとも一つの蓋受容体を含む。蓋受容体は、容器のためのグリッパーユニットの蓋ホールダーによる蓋へのアクセスを可能とする形状を持つ。
【0067】
任意に、一つの、または複数の容器ホールダーは遠心機に登載される。任意に、一つのまたは複数の容器ホールダーは、遠心機に回旋的に登載される、例えば、遠心ローターに回旋的に登載される。蓋は、任意に、開放される、すなわち、蓋の開放位置にある。
【0068】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料受容用容器を保持するのに好適で、容器の開口を閉鎖するための蓋を付着させた容器ホールダー、および、蓋ホールダー、または容器のためのグリッパーユニットで、容器に対し定められた位置に蓋を保持するためのグリッパーユニットである。容器ホールダーは、容器に付着した蓋を保持するための蓋受容体を持ち、蓋ホールダーによる蓋へのアクセスを可能とする。装置は、その上に、遠心機を含み、容器ホールダーは、遠心機において使用するのに好適である。
【0069】
本パラグラフの直前先行の2パラグラフにおいて記載される容器ホールダー、または装置では、蓋に対する蓋ホールダーのアクセスは、任意に、蓋ホールダーによる蓋に対する機械的接触を含む。蓋受容体における陥凹は、任意に、蓋ホールダーによる蓋へのアクセスを可能とする。装置は、任意に、蓋ホールダーによる蓋へのアクセスが、容器が装置のグリッパーによって把捉される時に、獲得されるように設計される。
【0070】
容器は、任意に、プラスチックで製造される。蓋は、任意に、容器に付着される。容器は、任意に、断面が円形であり、好ましくは、2cmまたは1cm未満の直径を持つ。蓋は、任意に、容器の開口を閉鎖するのに好適である。
【0071】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を保持するための少なくとも一つの容器ホールダーを有する回転可能な遠心機、および、容器ホールダーに容器を挿入するためのグリッパーである。
【0072】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を保持するための少なくとも一つの容器ホールダーを有する回転可能な遠心ローター、および、容器ホールダーから容器を排除するためのグリッパーである。
【0073】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を保持するための少なくとも一つの容器ホールダーを有する回転可能な遠心ローター、および、容器ホールダーの第1保持位置から容器ホールダーの第2保持位置へ容器を移送するためのグリッパーである。任意に、第1および第2保持位置は異なる。第1および第2保持位置は、同じ容器ホールダーにあっても、または異なる容器ホールダーにあってもよい。
【0074】
これらの装置では、グリッパーは、任意に、容器の突出部分と嵌合することによって容器を把捉するように設計される。グリッパーは、開口、または主要開口を有する容器、および容器の突出部分に対して任意であり、次に、グリッパーは、容器の開口から離れた、容器の突出部分の側面において容器を把捉するように設計される。任意に、グリップ要素は、容器の頸部と嵌合するのに好適で、かつ、容器の開口から離れた、頸部の側面と嵌合するのに好適な窪みを含む。容器は、任意に、生物試料を受容するためのものである。容器ホールダーや、任意に、遠心ローターに回旋的に登載される。グリッパーは、任意に、容器ホールダーの角度位置または変位位置を位置決めするための位置決め要素を含む。位置決めは、任意に、該位置決め要素と、カウンター位置決め要素との相互作用によって実行される。変位位置を位置決めするための位置決め要素は、任意に、容器ホールダーのストップと、例えば、遠心ローターと共時回転可能なストップと協力するように設計される。グリッパーは、任意に、下記の部分を含む。容器を把捉および解除するために動くことが可能なグリップ要素、グリップ要素をクランプするのに好適なクランプ要素、リフト要素、および、リフト要素の挙上運動を駆動し、それによってグリップ要素を動かすのに好適なリフト要素用ドライブである。移送は、任意に、容器の回転運動を含む。容器ホールダーは、任意に、遠心機から排除可能である。
【0075】
クランプ要素は、任意に、開口の方向においてグリップ要素をクランプするのに好適である。リフト要素の挙上運動は、任意に、グリップ要素を閉鎖方向に動かす。クランプ要素は、任意に、閉鎖方向にグリップ要素をクランプするのに好適である。リフト要素の挙上運動は、任意に、グリップ要素を開放の方向に動かす。クランプ要素は、任意に、グリップ要素をクランプし、そうすることによって容器を解除することが可能である。リフト要素の挙上運動は、任意に、グリップ要素を動かし、そうすることによって容器を把捉することが可能である。クランプ要素は、任意に、グリップ要素をクランプし、そうすることによって容器を把捉することが可能である。リフト要素の挙上運動は、任意に、グリップ要素を動かし、そうすることによって容器を解除することが可能である。
【0076】
容器ホールダーは、任意に、遠心ローターに可動的に登載される。この場合、位置決め手段は、任意に、挿入/排除/移送の際、容器ホールダーの運動を阻止または制限することが可能である。任意に、移送は、直接行われる。すなわち、グリッパーは、第1保持位置からの排除から、第2保持位置への挿入まで全期間を通じて容器を保持する。移送時、さらに任意に、第3保持位置があり、さらに、装置は、第3保持位置と第1または2保持位置の間で容器を移送することが可能である。グリップ要素は、任意に、容器の頸部に嵌合するのに好適な、少なくとも一つの窪みを含む。グリップ要素は、任意に、第1グリップ要素であり、グリッパーはさらに、第1グリップ要素と類似の性質を持つ第2グリップ要素を含む。グリッパーは、任意に、回旋軸の周囲に回旋的に登載される。グリップ要素は、任意に、容器のために中心軸を定め、次に回旋軸は、中心軸とは異なる。
【0077】
さらに、グリッパーを介して、容器を遠心ローターの容器ホールダーに設置するための方法が提案される。その際、容器ホールダーは、容器のための保持位置を持つ。方法は下記の工程を含む。グリッパーは、保持位置に対して所定の相対位置に運ばれる;グリッパーは、容器を保持位置に設置するように動かされる;容器はグリッパーによって解除される。
【0078】
さらに、グリッパーを介して、遠心ローターの容器ホールダーから容器を排除するための方法が提案される。その際、容器ホールダーは、容器のための保持位置を持つ。方法は、下記の工程を含む。グリッパーは、保持位置に対して所定の相対位置に運ばれる;容器がグリッパーによって把捉される;グリッパーは、保持位置から容器を排除するように動かされる。
【0079】
さらに、グリッパーを介して、遠心ローターの容器ホールダーの第1保持位置から、遠心ローターの容器ホールダーの第2保持位置へ容器を移送するための方法が提案される。方法は、下記の工程を含む。グリッパーは、第1保持位置に対して所定の相対位置に運ばれる;容器がグリッパーによって把捉される;グリッパーは、第1保持位置から容器を排除するように動かされる;グリッパーは、第2保持位置に対して所定の相対位置に運ばれる;グリッパーは、第2保持位置に容器を設置するように動かされる;容器はグリッパーによって解除される。
【0080】
任意に、前述の方法は、遠心ローターの回転軸の周囲に容器ホールダーの、指定回転角度を調製する工程を含む。排除時および/または挿入時、グリッパーおよびグリッパー部材は、任意に、z方向に共時運動させられ、第2保持位置に対して容器を位置決めする際、グリッパーは、任意に、グリッパー部材に対して動かされる。さらに、方法は、任意に、角度位置、または変位角を固定する工程を含む。例えば、容器ホールダーの変位角は、グリッパーの位置決め要素を、容器ホールダーのカウンター位置決め要素と相互作用させることによって固定することが可能であり、容器ホールダーは、容器ホールダーの回旋運動のストップと接触し、かつ、容器ホールダーの変位角は、ストップにおける位置決め要素とカウンター位置決め要素との相互作用によって固定される。容器ホールダーの回旋角度のストップは、任意に、遠心ローターと共時回転することが可能である。保持位置は、任意に、遠心機から排除することが可能な容器ホールダーにある。
【0081】
容器を把捉する工程は、任意に、下記の部分工程を含む。リフト要素の挙上運動を産生すること;リフト要素の挙上運動を、容器を把捉するために、グリップ要素の閉鎖方向または開放方向の運動に変換すること、その際、運動は、クランプ要素がグリップ要素に及ぼす力に対して、対向方向に向けられ;それゆえ、グリップ要素を介して容器を把捉することから成る諸工程である。
【0082】
容器を解除する工程は、任意に、下記の部分工程を含む。リフト要素の挙上運動を産生すること、その際、該挙上運動によって、開放方向に向かうグリップ要素の運動が可能とされ;クランプ要素を介して容器を解除するために、開放方向または閉鎖方向にグリップ要素の運動を産生すること;および、したがってグリップ要素を介して容器を解除することから成る諸工程である。
【0083】
容器を把捉する工程は、任意に、容器の開口、または主開口から離れた容器の突出部の側面において容器を把捉することを含む。
【0084】
第2保持位置に対して容器を位置決めする際、グリッパーは、任意に、z方向とは異なる方向に、グリッパー部材に対して動かされる。第2保持位置に対し容器を位置決めする際、グリッパーは、任意に、z軸に対して垂直に延びる平面においてグリッパー部材に対して動かされる。第2保持位置に対し容器を位置決めする際、グリッパーは、任意に、z軸に対して平行に延びる軸の周囲においてグリッパー部材に対して回旋される。任意に、第1および第2保持位置は異なる。それらの保持位置は、同じ容器ホールダーにあってもよいし、異なる容器ホールダーにあってもよい。グリッパーは、任意に、容器の突出部分と嵌合する。
【0085】
試料輸送のための前述の方法において、流体の調節的輸送を可能とし、例えば、遠心機における容器の自動輸送の際、不要の運動を阻止するために、遠心機、および遠心機に登載される容器ホールダーを固定および/または位置決めすることは有用である。何よりもまず、このような運動は、遠心ローターの、その回転軸周囲における回転、または、遠心ローターにおける容器ホールダーの、その回旋軸周囲における回旋であってもよい。
【0086】
それゆえ、下記の部分を有する、生物試料処理用装置が提案される。回転軸の周囲に回転することが可能な遠心ローター、遠心ローター用ドライブ、および、位置決め要素であって、ローターと共時回転可能なカウンター位置決め要素と相互作用を持つことによって遠心ローターの角度位置を決めるために、ローターと共時回転しない位置決め要素、である。
【0087】
角度位置の位置決めは、任意に、位置決め要素とカウンター位置決め要素の間の機械的嵌合によって実行される。遠心ローターは、任意に、生物試料受容用容器のための容器ホールダーを受容するのに好適である。カウンター位置決め要素は、容器ホールダー、または遠心ローターに登載される。任意に、装置は、遠心機、または遠心ローターの角度位置を検出するための手段を含む。次に、位置決め要素は、カウンター位置決め要素の操作範囲内に配されるように、検出された角度位置の関数として軸合わせすることが可能である。さらに、後述するように、位置決め要素は、任意に、容器ホールダーの変位角を決めるのに好適である。遠心ローターは、任意に、生物試料受容用容器のための容器ホールダーの回旋登載に好適であり、かつ、容器ホールダーの回旋運動に対するストップを有する。次に、位置決め要素は、カウンター位置決め要素との相互作用によって、ストップにおいてある変位角に容器ホールダーを保持することが可能である。
【0088】
位置決め要素は、容器を把捉するためのグリッパーユニットのグリップ部材に付着されてもよい。それとは別に、位置決め要素は、例えば、ピペットユニットに付着されてもよい。位置決めは、任意に、角度位置を0.1°の正確度で調整可能としてもよい。さらに、装置は、任意に、角度位置を1.5°の正確度で調整可能とする、遠心ローターを粗大に位置決めするための手段を含む。その上に、装置は、任意に、遠心ローターの角度位置を検出するための手段、例えば、遠心ローターの角度位置を1°の正確度で検出可能とする手段を含む。ドライブは、任意に、電気ドライブ、好ましくは、誘導ドライブ、すなわち、非同期モーターである。位置決め要素は、任意に、スパイク、および、スパイクのための陥凹を含むカウンター位置決め要素を含む。位置決め要素は、任意に、位置決めが、グリッパーの、容器ホールダーの容器保持位置に対するアクセスを可能とするように、グリッパー部材に付着される。位置決め要素は、任意に、z方向にグリッパー部材に対し剛強に登載される。バネ登載は、任意に、容器の長さよりも大きい、位置決め要素の移動を可能とする。容器は、任意に、円形断面を持ち、好ましくはプラスチックで製造される。位置決め要素は、任意に、容器ホールダーの保持位置に対して固定角度に配置される。装置は、任意に、複数のカウンター要素、好ましくは3を超える、6を超える、または10を超えるカウンター位置決め要素を含む。
【0089】
さらに、遠心ローターの回転軸の周囲の回転角度において遠心機の遠心ローターを位置決めするための方法が提案される。方法は下記の工程を含む。遠心ローターと共時回転が可能なカウンター位置決め要素は、遠心ローターと共時回転しない位置決め要素と相互作用を持つ操作範囲内に運ばれ、および、遠心ローターは、位置決め要素と、カウンター位置決め要素の相ド作用によって位置決めされる。
【0090】
カウンター位置決め要素は、任意に、ある角度間隔において、遠心ローターの回転軸周囲で遠心ローターの角度位置を、カウンター位置決め要素が操作範囲内に入るように選択することによって、位置決め要素との相互作用の操作範囲内に動かされる。
【0091】
カウンター位置決め要素は、任意に、下記の工程によって位置決め要素との相互作用の操作範囲内に動かされる。遠心ローターの、回転軸周囲の角度位置が検出され、位置決め要素は、検出された角度位置の関数として、位置決め要素が操作範囲内に配されるように軸合わせされる。
【0092】
遠心ローターの位置決めによって、遠心ローターの容器用保持位置の、遠心ローターの回転軸周囲における回転角度が任意に決められる。相互作用は、任意に、機械的嵌合、または磁気的相互作用である。該位置決めによって、遠心ローターの、そのローター軸周囲における回転角度が任意に決められる。遠心機における容器ホールダーの回転角度の位置決めと共に、容器ホールダーの変位角が、任意に、位置決めされるか、または固定される。
【0093】
さらに、生物試料処理用装置が提案される。装置は下記の部分を含む。ローター軸の周囲に回転可能で、生物試料受容用容器の容器ホールダーの回旋性登載に好適な遠心ローター、容器ホールダーの回旋運動のためのストップ、および、容器ホールダーのカウンター位置決め要素との相互作用によって、ストップに対しある変位角で容器ホールダーを押しつけるのに好適な位置決め要素である。
【0094】
容器ホールダーの回旋運動は、一般に、発振運動または変位運動と表示されてもよい。なぜなら、この運動は、一般に、変位角を定めるからである。
【0095】
位置決めは、任意に、前述の、角度位置決めのための位置決め要素を介して実行される。さらに、遠心ローターは、任意に、遠心ローターの遠心力によって引き起こされる回旋運動に対する第2ストップを含む。第1および/または第2ストップは、任意に、遠心ローターの上に登載されるか、または、遠心ローターと共に回転することが可能である。位置決めは、任意に、ストップに対して容器ホールダーを押しつけることによって実現される。ストップは、任意に、遠心ローターの遠心力によって引き起こされる参照回旋運動に対向する、容器ホールダーの回旋運動を制限する。回旋運動は、任意に、ほぼ水平軸の周囲に起こる。
【0096】
さらに、下記の要素を含む、生物試料処理用装置が提案される。ローター軸の周囲に回転可能で、生物試料受容用容器の容器ホールダーの回旋性登載に好適な遠心ローター、カウンター位置決め要素を含む容器ホールダー、容器ホールダーの回旋運動のためのストップ、および、カウンター位置決め要素との相互作用によって容器ホールダーをストップに接触させるのに好適な位置決め要素である。その際、容器ホールダーの変位角は、接触によって位置決め、または固定される。
【0097】
さらに、回旋的に遠心ローターに登載される、生物試料受容用容器の容器ホールダーの変位角を位置決めするための方法が提案される。方法は下記の工程を含む。位置決め要素は、容器ホールダーのカウンター位置決め要素と相互作用を持つようにさせられる;容器ホールダーは、容器ホールダーの回旋運動に対すストップと接触する;および、容器ホールダーの変位角は、ストップにおける位置決め要素とカウンター位置決め要素の相互作用によって位置決めされる。さらに、変位角は、回旋位置と呼ばれてもよい。
【0098】
位置決めは、任意に、前述の角度位置決めのための位置決め要素を用いて実行される。位置決めは、任意に、遠心ローターに登載されるストップに対し容器ホールダーを押しつけることによって実行される。
【0099】
さらに、生物試料受容用容器のための容器ホールダーが提案される。この容器ホールダーは、遠心機で使用するのに好適で、容器を保持するための保持部分、および、位置決め要素と嵌合する形状を持つカウンター位置決め要素を含む。この嵌合によって、遠心機における容器ホールダーの角度位置および/または変位角を位置決めすることが可能である。
【0100】
その上に、容器ホールダーは、任意に、遠心機に容器ホールダーを接続するのに好適な、接続部材を含む。接続部材は、任意に、回旋軸を定める。カウンター位置決め要素と、容器ホールダーの中心との間の距離は、任意に、カウンター位置決め要素と、容器ホールダーの辺縁との間の距離よりも大きい。カウンター位置決め要素は、任意に、位置決め要素を収容するための腔を含む。カウンター位置決め要素と位置決め要素の間の嵌合は、任意に、少なくとも一平面の方向におけるカウンター位置決め要素と位置決め要素の間の相対的運動を阻止するのに好適である。腔の断面は、任意に、腔の内部に向かって減少する。腔の一端の二つの対向点の間の間隔は、任意に、深度、または、位置決め要素が腔に挿入が可能な移動深度よりも小さい。容器ホールダーは、任意に、液体を処理するためのデバイスである。
【0101】
さらに、生物試料処理用装置が提案される。装置は下記の部分を含む。遠心機;生物試料受容用容器を保持するための保持部材を持つ、遠心機における容器ホールダー;および、位置決め要素である。容器ホールダーは、位置決め要素と嵌合することによって、遠心機における容器ホールダーの角度位置および/または変位角を位置決めするような形状を持つカウンター位置決め要素を含む。
【0102】
さらに、装置の操作が容易であると有用である。例えば、消耗品を補給するために、かつ、使用済み消耗品を排除するために前面部分、または、装置の、他の、簡単にアクセス可能な部分を与えることは有用である。特に、このセクションを、排除可能な、または引き出し可能なセクションとして、例えば、一つの、または複数の引き出しの形で与えることは有用である。
【0103】
さらに、装置が、典型的操作または負荷エラーを早期の段階で検出可能であることは有用である。例えば、インプットを互いに、および選ばれた手順について、一貫性に関してチェックすることは有用である。さらに、消耗品(例えば、処理液、容器、および/またはピペットチップ)による負荷を互いに、および選ばれた手順について、一貫性に関してチェックすることは有用である。
【0104】
処理ができるだけ少ない数の工程の後で開始可能となるように、ユーザーガイダンスをできるだけ単純なものとすることは有用である。ユーザーガイダンスは、できるだけ直観的なものとすべきである。例えば、グラフィックディスプレイを用いた構造化されたメニューガイドを与えることは有用である。さらに、メニューガイドを、めったに変更する必要のないインプットフィールドは、通常は見逃してもよい、任意のサブメニューを通じて到達可能となるように設計することは有用である。さらに、装置が、最後に使用されたか、または頻繁に使用される設定を保存し、高速アクセスのためにそれらを与えることは有用である。
【0105】
さらに、いくつかの異なる手順に適応可能となるように、装置を弾力的にすることが有用である。特に、QIAGEN社によって与えられるもののように、「結合−洗浄−溶出」およびその他の手順を含む広いスペクトラムがサポートされていると有用である。さらに、ソフトウェアの更新を介して生物試料処理のための他の手順も加えることが可能であるか、または、既存の手順が補正可能であると有利である。さらに、装置が、研究対象の、種々の数のサンプルを認識し、および/または、それらを弾力的にサポートすることが可能であると有用である。
【0106】
さらに、遠心機の温度を調整すること、特に、遠心機を冷却することは有用である。このために、下記の部分を含む、生物試料を遠心するための遠心機が提案される。コンテナ、コンテナ用蓋、コンテナの内部に配置される遠心ローター、遠心ローターのためのドライブ、蓋を冷却するための第1冷却デバイス、および、コンテナを冷却するための第2冷却デバイスである。
【0107】
第1冷却デバイスは、任意に、冷却ガスを介してコンテナを冷却するための冷却デバイスである。これは、任意に、コンテナを冷却ガスで噴射する噴射デバイスを含む。第1冷却デバイスの冷却ガスは、任意に、周辺空気である。
【0108】
第2冷却デバイスは、任意に、冷却ガスによってコンテナの外面を噴射するための噴射デバイスを含む。第2冷却デバイスの冷却ガスは、任意に、周辺空気である。任意に、第2冷却デバイスは、遠心ローター用ドライブとは独立に調節可能であり、および/または、第2冷却デバイスはさらに、ドライブを冷却するように設計される。
【0109】
任意に、第1および第2冷却デバイスは異なる。任意に、第1および/または第2冷却デバイスは冷却リブを含む。任意に、冷却リブは、水平および/または垂直に配置される。任意に、第1および/または第2冷却デバイスは、能動的冷却デバイスである。任意に、第1および/または第2冷却デバイスの、一つの、または複数の噴射デバイスは、それぞれ、ベンチレーターを含む。任意に、蓋は、好ましくはコンテナの外部から、コンテナの内部を閉鎖するのに好適である。任意に、コンテナは、蓋が閉鎖された時に、冷却ガスが、コンテナの内部に流入できないように、または、第1および/または第2冷却デバイスの冷却ガスが、コンテナの内部に流入できないように設計される。
【0110】
さらに、遠心機において生物試料を遠心するための方法が提案される。方法は、下記の工程を含む。遠心ローターに生物試料を納めること;蓋を用いて遠心機のコンテナを閉鎖すること;ドライブを介してローター軸の周囲に遠心ローターを回転させること;コンテナを冷却し、かつ、蓋を冷却すること、である。
【0111】
任意に、遠心コンテナの冷却は、噴射デバイスを用いて冷却ガスを遠心コンテナの外面に噴射することによって実行される。任意に、遠心コンテナの内面、または、遠心コンテナの内部は、冷却ガスによって噴射されない。任意に、噴射デバイスは、ドライブとは独立である。任意に、遠心ローターは、遠心コンテナの内部に配置される。
【0112】
その上に、下記の部分を含む遠心機が提案される。遠心コンテナ;遠心コンテナの内部に配置される遠心ローター;遠心コンテナ用蓋、および、周辺空気を用いる蓋冷却用デバイスである。装置は、遠心コンテナの内部とは分離した、周辺空気のための流通路を定める。
【0113】
任意に、蓋冷却用装置は、蓋を周辺空気で噴射するための噴射デバイスを含む。任意に、蓋は、内部域を持ち、流通路は、蓋の内部域を貫通する。任意に、冷却リブは、流通路と熱的に接触する、蓋の領域の中に配置される。任意に、冷却リブは、流通路の流れの方向に軸合わせされる。任意に、蓋は、遠心機の内部から熱を排除するための手段を含む。任意に、周辺空気は環境温度にある。任意に、蓋冷却用装置は、吸引された周辺空気の速度プロフィールを、好ましくは、ある角度で切断され、異なる角度でバック設定される冷却リブ辺縁を用いて均一化するための手段を含む。
【0114】
さらに、前述の遠心機の内の一つ、すなわち、その温度を調節するための、特に、遠心機を冷却するための装備を持つ遠心機を含む、生物試料用処理装置が提案される。
【0115】
さらに、遠心機を冷却するための方法が提案される。この遠心機は、遠心コンテナ、遠心コンテナの内部に配置される回転可能な遠心ローター、および、遠心コンテナ用の蓋を持つ。方法は下記の工程を含む。周辺空気を吸い込むこと、および、遠心コンテナの内部と隔てられた蓋の中の流通路にそって周辺空気を通過させることである。任意に、方法は、前述の遠心機の内の一つ、すなわち、その温度を調節するための装備を持つ遠心機において実行される。
【0116】
さらに、遠心機において生物試料を遠心するための方法が提案される。方法は下記の工程を含む。遠心機に生物試料を納めること;ドライブを介してローター軸の周囲に遠心機の遠心コンテナ内部の回転ウィールを回転させること;ドライブおよび遠心コンテナの外面を冷却剤で噴射すること、である。
【0117】
前述の実施態様とは独立に、さらに遠心機の他の局面が提案される。特に、生物試料を遠心するための遠心機が提案される。遠心機は下記の成分を含む。ローター軸の周囲に回転可能で、少なくとも一つの、生物試料用容器を受容するローターウィール;遠心コンテナ;および、ローター軸の周囲に回転可能で、ローターウィールと遠心コンテナの間に配される障壁であり、遠心プロセス時、ローターウィールの外方境界の高さは、容器の上縁、または容器用の容器ホールダーの上縁が占める位置の高さよりも小さい。
【0118】
さらに、容器中の物質表面の高さを決める方法が提案される。物質は、任意に、液体であるが、さらに、別の物質、例えば、粉末であってもよい。方法は下記の工程を含む。容器中の物質の表面は、放射線源によって照射される;物質の表面から来る放射線は、放射計によって測定される;放射計によって測定された放射線に応じて、放射線源、放射計、および容器は、互いに、下記が満たされるような空間関係に置かれる。
−物質表面に対する垂直線と、放射線源から物質表面へ通過する第1ビームとの間の第1角度が、
−物質表面に対する垂直線と、物質表面から放射計に通過する、第1ビームによって反射されるビームとの間の第2角度とほぼ等しくなり;物質表面の高さは、放射線源、放射計、および容器の空間関係の関数として決められる。
【0119】
任意に、照射は、ペンシルの直径が0.3mmと3cmの間の範囲、好ましくは1mmと6mmの間、例えば、約3mmであるペンシルビームを通じて実行される。任意に、表面は、空気と液体の間のインターフェイスである。任意に、放射線源および放射計は、同じ筐体に収容される。任意に、放射線源および放射計は、光センサーの中にある。任意に、放射線源、放射計、および容器を、互いにある空間関係に納めることは、放射線源を傾けることを含む。任意に、接着力によってもたらされる液体表面の曲線を考慮に入れてもよい。任意に、物質表面の高さは、第1および第2角度は同じであるという事実を用いて決められる。
【0120】
さらに、生物試料を処理するための装置が提案される。装置は、物質受容用容器のための容器ホールダー、および、容器における物質の表面の高さを決めるための充填レベル計を含む。その上に、充填レベル計は、物質の表面を照射するための放射線源;物質の表面から到来する放射線を測定するための放射センサー;位置決めデバイス;および調節ユニットを含む。調節ユニットは、放射計によって測定される放射線の関数として、放射線源、放射計、および容器を、互いに、ある空間関係に納めるように装備される。これは、
物質表面に対する垂直線と、放射線源から物質表面へ通過する第1ビームとの間の第1角度が、
物質表面に対する垂直線と、物質表面から放射計に通過する、第1ビームによって反射されるビームとの間の第2角度とほぼ等しくなるようにするためであり、かつ、
物質表面の高さを、放射線源、放射計、および容器の空間関係の関数として決めるためである。
【0121】
任意にさらに、充填レベル計の光学センサーまたは光センサーは、本出願に記載されるように、可動センサーを位置決めするために、または、容器の有無を決めるために好適である。
【0122】
その上、生物試料を処理するための装置が提案される。装置は、光学センサーおよび超音波センサーが付着される可動ユニット;液体コンテナ用ホールダーにおける液体コンテナの有無を、光学センサーのセンサーデータの関数として検出するための手段;および、液体コンテナに含まれる液体の充填レベルを、超音波センサーのセンサーデータの関数として決めるための手段を含む。
【0123】
前述の実施態様とは独立に、さらに、感受装置の別局面が提案される。したがって、下記の部分を含む、生物試料を処理するための装置が提案される。生物試料受容用容器のホールダー、容器は、認識性を向上させた少なくとも一つの容器部分を持つ;ホールダーの記録域を照射するための放射線源、記録域は、認識性を向上させた容器部分と関連する;記録域から到来する放射線の強度を測定するためのセンサー;および、測定された強度と定められた閾値とを比較することによって容器の有無を記録するように装備される評価ユニットである。
【0124】
容器は、任意に、遠心容器、フィルター容器、収集容器、またはピペットチップである。遠心容器および収集容器は、一般に、容器に、または容器から試料をピペット注入または排除するための主開口、および、任意に蓋を有する、例えば、いわゆるスピンチューブ、またはエッペンドルフチューブである。さらに、遠心容器は、一般に、主開口の反対の、遠心容器の側面に配置される流出口を持つ。認識性を向上させた容器部分は、任意に、膜、フィルター、フィルター膜、蓋ヒンジ、および/または容器の蓋である。
【0125】
センサーは、任意に、可動である。次に、装置は、装置の上に調整マークを照射し、該調整マークから到来する放射線を測定することによってセンサーの位置を決めるのに好適であってもよい。次に、センサーの運動は、任意に、少なくとも一つの方向、好ましくは二つの方向において、容器用グリッパー、または、ピペッチチップの受容用ピペットユニットの運動と連結する。
【0126】
後述するように、センサーは、任意に、容器における物質の存在、または充填レベルを決めることが可能である。保持領域から到来する放射線は、任意に、放射線源から到来する反射放射線である。放射線は、典型的には、電磁放射線であり、好ましくは、可視か、または赤外スペクトラム範囲にある。評価ユニットは、任意に、閾値未満の測定強度については不在を記録し、閾値を超える測定強度については存在を記録するように設計される。
【0127】
任意に、照射は、認識性を向上させた容器部分の広がりの0.3倍から1.3倍の直径を持つスポットを用いて実行される。放射線源およびセンサーは、任意に、共同運動が可能である。その上に、装置は、保持域に対して放射線源およびセンサーを位置決めするための位置決め手段を含む。
【0128】
放射線源からの放射線は、任意に、約3mm直径のスポットを持つ。認識性を向上させた容器部分は、任意に、少なくとも3mmx3mmの区域を持つ。認識性を向上させた容器部分は、一般に、容器の有無の間の信号差、または強度差が増加された容器部分である。
【0129】
さらに、容器用ホールダーにおける生物試料受容用容器の有無を検出するための方法が提案される。方法は下記の工程を含む。ホールダーの記録域が照射され、その際、記録域は、認識性を向上させた、容器の容器部分と連結され;記録域から到来する放射線の強度が測定され;容器の有無が、測定強度と、定められた閾値との比較を介して記録される。
【0130】
照射および測定が、任意に、可動センサーユニットによって実行され、方法は、任意に、前述のものの外に下記の工程を含む。容器ホールダーに対してセンサーを位置決めすることである。任意に、センサーユニットの位置は、装置に調整マークを照射し、調整マークから到来する放射線を測定することによって決められる。
【0131】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を受容するための容器ホールダー;超音波源および超音波センサーを有するセンサーユニット;および、超音波センサーからのセンサーデータの関数として、容器の開放状態を決め、かつ、超音波センサーからのセンサーデータの関数として、かつ、容器が開放の時、容器における物質の可能な存在を決めるための評価ユニットである。
【0132】
物質は、任意に、液体である。評価ユニットは、任意に、物質の充填レベルを、恐らく超音波センサーのセンサーデータの関数として決めるのに好適であるか、または決めるように配置される。評価ユニットは、任意に、発射超音波信号と、物質表面によって反射される超音波信号との間の移動時間を測定することによって、物質の充填レベルを決めるのに好適であるか、または決めるように配置される。センサーユニットは、任意に、可動であり、その上、放射線センサー、および、放射線センサーのセンサーデータの関数として、容器に対してセンサーユニットを位置決めするための位置決め手段を含む。放射線センサーは、任意に、容器の存在を決めるのに好適である。決定は、例えば、本出願の別の場所(例えば、次ページを参照)に記載される、容器の存在を決めるための方法を用いて実行してもよい。
【0133】
さらに、任意に、容器は、認識性を向上させた少なくとも一つの容器部分を持つこと、および、センサーユニットは、ホールダーの記録域を照射するための放射線源を有することが提案される。その際、記録域は、認識性を向上させた容器部分と連結される。次に、放射線センサーは、記録域から到来する放射線の強度を測定するのに好適であり、評価ユニットは、測定強度と定められた閾値との間で比較を実行することによって容器の有無を記録するように装備される。
【0134】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。容器の補給を維持するためのコンテナステーション;容器の性質に関する情報を含むコンテナステーション上のマーキング;および、マーキングを読み取るための放射線センサーである。
【0135】
マーキングは、任意に、コンテナステーションの辺縁から突出する要素である。マーキングは、任意に、コンテナステーションと一体的に形成される、少なくとも一つのマーキング要素を含む。マーキングは、任意に、二進情報、すなわち、イエス/ノー情報をコードする、少なくとも二つのマーキング要素を含む。コンテナステーションは、任意に、装置に対し各種方向に与えることが可能となるように、または装置に挿入可能となるように構成される。マーキングは、任意に、マーキングの読み取りが、各種の方向の内から選ばれた、ある特定の方向とは独立するように構成される。
【0136】
コンテナは、任意に、それぞれが一つの容器のための、複数の保持位置を含み、次に、光学センサーは、この複数の保持位置の各保持位置における容器の存在を検出するのに好適である。この決定のために、下記のパラグラフに記載される方法が用いられてもよい。
【0137】
任意に、コンテナステーションは、放射線源を含む。放射線源は、後述の下記の機能の内の一つ以上のために使用されてもよい。記録域の照射;マーキング要素の照射である。任意にさらに、コンテナステーションは、それぞれが一つの容器のための、複数の保持位置を含み、問題の容器は、認識性を向上させた、少なくとも一つの容器部分を持ち、かつ、放射線源は、記録域を照射するのに好適であり、記録域は、認識性を向上させた特定の容器部分と連結する。さらに、放射線センサーは、任意に、記録域から到来する放射線の強度を測定するのに好適であり;かつ、評価ユニットは、測定強度と定められた閾値との間の比較を実行することによって容器の有無を記録するように装備される。
【0138】
容器は、任意に、ピペットチップである。問題の容器の性質は、例えば、ピペットチップの収集容量、または、ピペットチップの試料、または、ピペットチップに含まれる試料であってもよい。光学センサーは、任意に、光センサーである。放射線源と共同では、光学センサーは、任意に、光センサーの部分である。放射線源は、任意に、マーキングのマーキング要素の照射に好適であり、装置は、マーキングを読み取るために、放射線源を介してマーキング要素を照射すること;センサーを介してマーキング要素から到来する放射線の強度を測定すること;および、測定強度を、その強度に対する任意の閾値と比較することが可能である。
【0139】
さらに、容器用のコンテナステーションにおいて生物試料受容用容器の性質を検出するための方法が提案される。方法は下記の工程を含む。容器の性質に関する情報を含む、コンテナステーションにおける第1マーキングが照射される;および、第1マーキングから到来する放射線の第1強度が測定される;容器のタイプが、測定された第1強度の関数として記録される。
【0140】
任意に、容器の性質に関する情報を含む、コンテナステーションの第2マーキングが照射される;および、第2マーキングから到来する放射線の第2強度が測定される;および容器の性質が、測定された第1および第2強度の関数として記録される。
【0141】
さらに、それぞれが、一つの生物試料用容器のための、複数の容器保持位置を持つ、遠心機の占拠をチェックするための方法が提案される。方法は下記の工程を含む。容器保持位置について、その中に容器が存在するかどうかが記録される;容器保持位置において存在と記録された容器の全数が保存される;容器保持位置において存在と記録された容器の全数に応じて、容器保持位置における容器の分布について少なくとも一つの条件が決められる;容器保持位置において存在と記録された容器の分布が、該条件を満たすかどうかについてチェックが行われる。同じ容器について、サンプル容器位置が、攪拌器および/またはヒーターにおいて任意に配置される。
【0142】
さらに、複数の容器ホールダーを持つ遠心機の占拠をチェックするための方法が提案される。容器ホールダーは、それぞれ、生物試料のための少なくとも一つの容器のための、少なくとも一つの容器保持位置と連結する。各容器ホールダーについて、空席状態は、連結容器保持位置に容器が存在しないことと定められ、満席状態は、連結容器保持位置に少なくとも一つの容器が存在することと定められる。方法は下記の工程を含む。容積ホールダーについて、それらが空席か、満席かが記録される;満席容器ホールダーの分布および全数が保存される;保存される全数に応じて、満席容器ホールダーの適正分布のために少なくとも一つの条件が決められる;かつ、保存された満席容器ホールダーの分布が、条件を満たすかどうかについてチェックが行われる。任意にさらに、容器保持位置に存在する容器の全数も保存される。
【0143】
上記方法において、容器保持位置は、任意に、遠心ローターと共時回転することが可能である。
【0144】
前記方法において、センサーは、任意に、容器保持位置の中に容器が存在するかどうかを記録し;かつ、方法は、その上に、センサーを介して、サンプル容器位置におけるサンプル容器の数を記録する工程を含む。方法は、任意にさらに、サンプル容器の数が、存在すると記録された容器の全数と適合するかどうか、すなわち、二つの数字が一致すること、または、サンプル容器の数が、数組の容器保持位置の数に対応することをチェックする工程を含む。
【0145】
さらに、方法は、任意に、一サンプル容器に対し一容器保持位置を割り当てる関連づけを確立する工程を含む。この場合、関連づけは、任意に、各サンプル容器に、容器が存在すると記録された容器保持位置を割り当てるか、または、その中の少なくとも一つの容器保持位置において容器が存在すると記録された、一群の容器保持位置をサンプルに割り当てる。関連づけは、典型的には、容器保持位置に関連づけられたサンプル容器位置に、サンプル容器を運ぶようにとの指示を発することによって確立される。サンプル容器位置は、任意に、一般的表示を介して、容器保持位置に割り当てられる。サンプル容器位置は、サンプル容器ステーション中のサンプル容器位置の配置は、遠心機中の容器保持位置の配置に対応するという事実によって、容器保持位置に割り当てられる。関連づけは、任意に、各容器保持位置を、サンプル容器のサンプル容器位置に割り当てる表を産生することによって確立される。
【0146】
さらに、サンプル処理用装置の占拠をチェックするための方法が提案される。方法は下記の工程を含む。処理されるサンプルによって調製されたサンプル容器の数が記録される;調製されたサンプル容器の数に応じて、該サンプルを処理するための消耗試料の必要数および/または量が決められる;装置中に存在する消耗試料の数および/量が決められる;および、装置中に存在する消耗試料の数および/または量が、必要とされる消耗試料の数および/または量と比較される。
【0147】
任意に、容器保持位置は、遠心ローターと共時回転が可能である。任意に、消耗試料の必要数および/または量は、プロトコールに従って決められる。任意に、消耗試料は、容器、特にピペットチップ、フィルター容器、例えば、スピンチューブ、および収集容器、例えば、いわゆるエッペンドルフチューブを含むリストから選ばれる。任意に、消耗試料は、さらに、生物物質、例えば、生物流体、酵素、および/またはバッファー液を含む。任意に、消耗試料の現実状態から、ユーザーに対する参照が、所望の状態の産生のために生成される。
【0148】
さらに、複数の容器ホールダー、または液体を処理するためのデバイスを保持するためのローターを持つ遠心機が提案される。各容器ホールダーは、遠心時、すなわち、ローター軸周囲におけるローターの回転時、第1容器を保持することが可能である。さらに、遠心機は、各容器ホールダーから第1容器を排除することが可能な取り扱いユニットを含む。特に、これを、容器ホールダーが遠心機内にある間に実行することが可能である。その上、取り扱いユニットは、容器ホールダーの中に保持される第2容器に、第1容器を接続すること、または、第2容器の中に少なくとも部分的に第1容器を挿入することが可能である。任意に、グリッパーは、xおよびy方向に動かすこと、ピペットユニットと共にxおよびy方向に運動を実行すること、および/または、z方向に動かすことが可能である。z方向の運動は、一般に、ピペットユニットとは独立する。グリッパーは回転することが可能であり、容器ホールダー中の容器を再配置することが可能である。この再配置は、一般に、グリッパーを回転することを含む。
【0149】
さらに、遠心ユニットにおいて生物試料を処理するための方法が提案される。遠心ユニットは、回転可能な遠心ローターを有する遠心機、遠心ローターの中に配置される容器ホールダー、および生物試料受容用容器が保持される第1保持位置、およびグリッパーを有するグリッパーユニットを含む。方法は下記の工程を含む。第1保持位置から容器を排除すること;第1保持位置にアクセスするためにグリッパーを位置決めすること;グリッパーを介して容器を把捉すること;および、容器が、グリッパーによって容器ホールダーから排除されるようにグリッパーを動かすこと、である。
【0150】
方法は、任意に、回転位置を位置決めすること、または、遠心ローターの回転運動を阻止することから成る追加工程を含む。任意に、容器ホールダーは、遠心ローターに回旋的に登載され、方法は、遠心ローターにおける容器ホールダーの回旋運動を阻止することから成る追加工程を含む。
【0151】
記載の先行部分および後続部分は、生物処理用装置において使用することが可能な個々の要素、および方法を記載する。図示の個々の要素および方法の記載は、別様に特に言明しない限り、生物試料処理用装置とは基本的に独立する。したがって、記載される個々の要素および方法は、本明細書の装置において示されるものとは異なるやり方で組み合わせることが可能であり、または、該装置とは、互いに独立に異なるやり方で使用されてもよい。
【実施例】
【0152】
個々の局面の記載
システム全体の部分の概観
図1aは、本発明の実施態様の作業プラットフォーム2の平面図を示す。生物試料処理用手順工程を実行するのに有用な、いくつかのモジュールが示される。図1aには下記のモジュールが示される。
−生物試料を遠心するための遠心ユニット200(図3aから5を参照);
−不用物、例えば、使用済みピペットの先端などのための廃棄物ステーション740;
−生物試料用手順を実行するための各種消耗試料用の消耗品ステーション700(図12参照);消耗品ステーションは、何よりも先ず、手順工程を実行するためのバッファー液体を有するコンテナを保持するためのコンテナ・ステーション710を含む。消耗試料用の消耗品ステーション700はさらに、ピペットユニットを介してピペット先端を受容するためのピペット先端ステーション720、および手順工程を実行するための他の流体用の他のコンテナを含む。
−生物試料および/または他の液体を加熱および/または攪拌するためのヒーター/攪拌器600(図13および14参照)。ヒーター/攪拌器は、例えば、分解工程を実行するために使用することが可能である。
−ユーザー案内および他の情報の入力および出力のために使用されるディスプレイ910。
【0153】
図示の個々の要素は、できる限りモジュールとして配置される。これらの要素は、作業プラットフォームに個々に登載され、排除されるが、挿入可能であることが好ましい。例えば、電流補給、または個々のモジュールの調節のための、追加の接続は、プラグイン接続を介して与えられる。個々のモジュールの交換を容易にするために、モジュールは、作業プラットフォームに示したその断面とほぼ一致する空間を、作業プラットフォームの下に占めていて、そのために、垂直に押し込むことが可能となっていることが好ましい。しかしながら、さらに、空間の理由で、個々のモジュールが、作業プラットフォームの下に、作業プラットフォームに示したその断面よりも大なり小なり近似のスペースを占めることは有利である。
【0154】
作業プラットフォームのモジュラー構築は、個々のモジュールの配置において異なる、別の実施態様を示唆する。このようにして、特別の空間要求を考慮することが可能である。さらに、図1aに示すように、個々のモジュールが省略される別の実施態様が可能である。したがって、例えば、分解工程を実行する必要がない場合には、そのような工程を実行するためのヒーター/攪拌器600が省略される実施態様が可能である。同様に、他の処理工程を実行するための別モジュール、または、既に支援される処理工程をさらによく実行するための別モジュールを付加してもよい。他のモジュールの例は、UVランプ;ヒーター/攪拌器の積極的冷却;消耗試料、例えば、容器ホールダー、容器、バッファー液、およびその他の処理流体を自動的に負荷するための装置;処理流体を分析するための分析モジュール;消費された消耗試料の処分用装置;およびその他のモジュールを含む。
【0155】
生物試料処理用装置の作業プラットフォームの、もう一つの平面図が、図1cに示される。図1aとは対照的に、図1cに示す平面図では、遠心機200の遠心蓋240は、図説のために排除される。これは、その中に配置された遠心ローター212および容器ホールダー120が見えるようになることを意味する。さらに、遠心蓋の冷却システムの空気流入口253および空気流出チャンネル255を見ることができる。さらに、遠心蓋を開閉するための機構260、および、遠心蓋を閉鎖位置に固定するための要素268を見ることができる。これらの要素を、図3bおよび5を参照しながらさらに詳細に説明する。
【0156】
さらに、グリッパーユニット400、ピペットユニット500、および、グリッパーおよびピペットユニットを動かすためのキャリッジシステム300が示される。
【0157】
キャリッジシステム300(図6も参照されたい)は、装置に、例えば、装置の背面壁に固定的に付着されるX−レール312(すなわち、その方向が、座標系のX方向を定義するレール)、およびY−レール314を含む。Y−レールの一端は、スライド要素318によって、X−レールに登載されるが、その登載は、X−レール312においてスライド要素318をX方向に滑走させることによってY−レールが移動されるように行われる。Y−レールは、スライド要素によって水平位置に保持される。これは図面には示されないが、別法として、Y−レールの他端に、作業プラットフォーム2に付着させた第2X−レールにそって滑走可能な、第2スライド要素を与え、それによって、Y−レールが、その両端のそれぞれにおいてスライド要素によって保持されるようにすることも可能である。
【0158】
キャリッジ部材320は、Y−レールにそってY方向に動かすことが可能であり、このキャリッジ部材320は、グリッパーユニット400およびピペットユニット500を含む。グリッパーユニットおよびピペットユニットは、それぞれ独立に、キャリッジ部材320にそってz方向(すなわち、垂直方向、すなわち、図1cに描く平面に対して垂直に)に動かすことが可能である。このようにして、グリッパーユニット400およびピペットユニット500は、全ての方向に動かすことが可能であり、方向zへの動きは独立的である。
【0159】
順次行う手順の複雑性およびモジュールの配置に応じて、グリッパーおよびピペットユニットの別態様が可能である。例えば、グリッパーユニット400およびピペットユニット500が一方向(例えば、方向z)のみに動かすことが可能である実施態様、あるいは、二方向(例えば、方向xおよび方向z)に動かすことが可能な実施多様も可能である。この場合、例えば、Y−レール314を省略することが可能であり、キャリッジ部材320は、固定レールに直接付着させることが可能となると考えられる。さらに、二つのレールの一方、または、両レールを、例えば、キャリッジ部材320が付着されるピボットアームを介して曲線運動を産生するように、例えば、一つ以上の要素と交換することも可能であると考えられる。さらに、グリッパーまたはピペットユニットも、それらが所望の手順工程を実行するのに必要でない場合は、省略することも可能である。
【0160】
筐体、カバー
図2aは、本発明による装置を斜視図において示す。装置は、筐体4の中に配置される。装置はさらに、筐体の前側にカバーを含む。カバーは、図2aでは閉鎖される。筐体4は、例えば金属、または、プラスチック、または他の、ある頑丈な試料から製造されてもよい。カバー10は、手動でそれを開放するためのハンドル12を持つ。カバー10は、装置の内部が、動作時、光学的に監視することが可能となるように透明に構築される。
【0161】
カバー10および筐体4を防音性構築とすると有利である。このために、筐体4に、音吸収性内張りを与えてもよい。さらに、筐体の振動性部分も、防音的に強靭に懸垂させてもよい。シールがカバー10に設けられてもよい。その外、図2aは、ディスプレイ910を示す。さらに、消耗試料用の廃棄物コンテナ750の引き出し要素が示される。引き出し要素は、ハンドル752を介して装置の前側から引き出すことが可能である。さらに加えて、ラウドスピーカ用のラウドスピーカ開口902、およびオン/オフスイッチ6が示される。廃棄物コンテナの使用は、下記にさらに詳細に記載される。
【0162】
図2bは、カバー10を排除した場合の図2aの装置を示す。そのために、筐体4の内側に、図1aおよび1cに示す作業プラットフォーム2が、遠心蓋240、ヒーター/攪拌器600、フォーク型光遮蔽器852、コンテナステーション710、およびY−レール314を持つ状態を見ることができる。ホールダー14は、上方に回旋運動され、それによってカバーが手動で上方に開放可能とされる。
【0163】
遠心機および他の成分は一体化されて、装置のプラットフォームに納められ、そのため、安定性を実現し、かつ、振動および隣接モジュールの影響をほぼ抑圧することが可能である。
【0164】
遠心機
図3aは、遠心機200の斜視図を示す。この図において、遠心蓋240は閉鎖され、そのため遠心機のローター212は見ることができない。遠心蓋240は、蓋カウリング244を含む。蓋240の他の部分が、図3cと組み合わせて記載される。図3aに、遠心ローターを囲む、遠心機コンテナ220が示される。遠心機コンテナは、遠心ローターを、環境から空気力学的に遮蔽し、雑音を低減し、高いローター速度において部分が脱離した際の安全策として役立つ。さらに、見ることができるものは、非同期型電気モーターの形状を取る遠心ドライブ218である。さらに、他のドライブ形態、例えば、ベルトまたはチェーンを用いるドライブも可能である。図示のドライブは、約0−15,000rpmの速度のために設計される。
【0165】
図3bでは、遠心機200が、遠心蓋240が開放した状態で示される。ここには、遠心スピンドル214の周囲に回転可能な遠心ローター212が示される。さらに、遠心軸214の周囲に、遠心ローター212と共に回転可能なシールド、またはローターディッシュ216が示される。遠心ローター212は、容器ホールダー120を懸垂するための手段を含む。この種の容器ホールダー120が図11に示される。原理的には、この目的のために与えられる位置のいくつかは、容器ホールダーによって占拠されてもよいが、ただしその際、容器ホールダーが遠心ローターの周囲に均一に分布されて、不均衡が全く無いことが確保されるよう注意を払うことが好ましい。それに加えて、遠心ローター212と共に回転しない遠心コンテナの内壁222が示される。遠心蓋240の開閉のために、ドライブ(図示せず)によって駆動される伝達ロッド262が示される。さらに、対応する交合部分268の中に貫入され、ロック機構269を介して保持され、そのため、蓋が閉鎖された場合、その閉鎖位置にしっかりと保持される、蓋の閉鎖部材267が示される。さらに、遠心蓋240が閉鎖された場合、遠心コンテナ220の内部を少なくとも部分的に密閉する、遠心蓋のためのシール228が示される。生物サンプルを処理する場合、遠心機内の温度が、指定の温度範囲内に維持可能である場合、より良い結果が得られる可能性が高い。特に、遠心時に産生される摩擦熱が完全に最小化されるか、または外部に放出された場合、結果を改善することが可能である。
【0166】
図3a、3b、および3cに示す遠心機は、これらの要求を部分的に満たす冷却システムを備える。図示の冷却システムによって、遠心機から熱を放出することが可能になる。さらに、図示の冷却システムによって、遠心機内部の空気流が有利な影響を受けることが可能になる。
【0167】
遠心機冷却システムの一つの要素は、遠心コンテナ220の外部冷却器230である。外部冷却器230は図3aに示される。外部冷却器は、熱を、遠心コンテナ220またはその外壁から周辺大気へ効率的に放散させることを可能とする、冷却リブ232を含む。さらに、図示の冷却リブ232とは別の形の冷却表面を考えることも可能である。さらに、例えば、他の何らかのやり方で構築される冷却リブ、特に熱伝導性の高い試料から成るコーティング、または、周辺大気に熱を効率的に放散させる、他の何かの表面も可能である。図示の実施態様とは独立に、50W/(m2K)を超える熱移送係数を持つ表面または配置が好ましいが、一方、100W/(m2K)を超える熱移送係数が特に好ましく、かつ、150W/(m2K)を超える熱移送係数を持つものがもっとも好ましい。
【0168】
その上にさらに、図示の換気装置234が、遠心コンテナ220を外部的に冷却するのに役立つ。この装置は、遠心コンテナの外壁の上に風を吹く。さらに、これも、外気への、熱のより効率的な放出をもたらす。しかしながら、さらに、換気装置234も省略してもよいし、あるいは、他の何かのデバイス、例えば、別の冷却ガス、例えば、窒素、あるいは、液体冷却剤(例えば、水冷却)による噴射用デバイスによって置換することも可能と考えられる。
【0169】
空気流を外方に向けるために、遠心機204の底部には穴205が与えられる。さらに、遠心機が装置1の一隅に配置される場合、あるいは、ホースなどの側面空気出力口が与えられる場合、側面空気排除スロットも可能である。図示の実施態様では、換気装置234は、冷却リブ232またはコンテナ壁222ばかりでなく、同時に、遠心ローター212のドライブ218に対しても、冷却ガスを噴射することが可能であるという利点を有する。
【0170】
図3aから3cに示す遠心冷却法は、空気、または他の全ての冷却剤が、遠心コンテナの内側に入ることを回避する。さらに、シール228、229、および保護リング215a、およびコンテナ壁222の性質は、冷却ガスの浸透の阻止を助ける。図示の実施態様とは独立に、冷却ガスが、遠心コンテナ220の内部の上を流れない場合は好都合である。言い換えると、空気、または別の冷却ガスは、遠心コンテナの内部に入らない、すなわち、遠心コンテナの内部は、冷却ガス、または冷却ガス流から遮蔽される。
【0171】
遠心機を冷却するための、または、冷却器の内部から熱を放出するための、もう一つのデバイスは、遠心蓋240を冷却するための蓋冷却システム250である。遠心蓋240を冷却することは、、遠心機内部で加熱された空気が上昇し、したがって蓋に向かって動く傾向を持つという利点を有する。その結果、熱は、蓋を通じて特に効率的に排除することが可能になる。遠心蓋240用冷却デバイス250については各種実施態様を考えることが可能である。
【0172】
そのような一つの実施態様が、図3aから図3cに示される。この実施態様は、遠心蓋240を冷却するために、周辺空気を取り込んで、これを、遠心蓋240に向かって吹きつける換気装置251を含む。空気は、空気流入チャンネル252を通じて遠心蓋240に導かれる。空気は、蓋240への空気流入部253および対応する空気流入口258を含む導入装置を介して遠心蓋に導入される。空気は、遠心蓋240の内部を通過、または吹きぬけ、そうすることによって、遠心蓋から熱を吸収し、それを再び運び去る。このようにして、空気は、遠心蓋から熱を放出することが可能となる。空気は、空気流出口254を通じて放出される;蓋を通過した加熱空気は、空気流出口254を通じて蓋から脱出し、次に、空気流出チャンネル255を通じて装置の底部に導かれ、次いで装置から放出される。
【0173】
図3cは、蓋カウリング244が排除された状態(図3aおよび3bを参照)の遠心蓋240を示す。これは、遠心蓋の蓋基部242が、気流のチャンネル257を定める冷却リブ256を有することを示す。冷却リブ256および蓋の拡大表面は、遠心蓋240から、蓋を流通する空気に向かう、熱の効率的放出を確保する。コンテナ232の冷却リブと同様に、ここでも、蓋内部の表面の形状についてはいくつかの別態様を有することが可能である。
【0174】
さらに、蓋冷却の性質について異なる別態様も可能である。例えば、遠心蓋の蓋カウリング244は排除されても、および/または、換気装置251は省略されてもよい。後者の場合、遠心蓋は、周辺空気によって受動的に冷却される。さらに、冷却液、例えば、水などによって蓋を冷却することも可能である。この場合、屈曲性チューブを用いて、冷却液を、蓋表面へ補給し、かつ、該表面から排除し、そうすることによって、チューブがあるにも拘わらず全く困難なく蓋を開放、閉鎖することが可能となることは有利である。図示の実施態様とは独立に、50W/(m2K)を超える熱移送係数を持つ表面または配置が好ましく、100W/(m2K)を超える熱移送係数が特に好ましく、かつ、150W/(m2K)を超える熱移送係数の内の一つがもっとも好ましい。
【0175】
図3bは、遠心機のもう一つの成分としてローターディッシュまたはシールド216を示す。図4と接続してさらに正確に記載されるように、ローターディッシュ216は、遠心機のコンテナ内部の熱および気流の発達に影響を及ぼす(図4参照)。図示の実施態様とは独立に、ローターディッシュ216の遠心スピンドル214の外側には孔、またはその他の開口は与えられない。
【0176】
それに加えて図3bには、遠心機のローター212が示される。ローター12は、容器ホールダー120を受容するための12個の受容位置を持つ。受容位置には番号が付せられる。番号「1」によってマークされる第1受容位置は、さらに任意に、簡単に認識可能なマーキング、例えば、着色マーキング(図示せず)によってマークされてもよい。ローターは、容器ホールダー120用の懸垂手段110のためのホールダーを含む。容器ホールダー120を持つ懸垂手段110が該ホールダーから懸垂されると、懸垂手段110は、ローター212に対し、水平軸の周囲に回旋可能とされる。図3bは、例えば、懸垂手段110によってローター212中に懸垂され、水平回旋軸の周囲に外方に回旋される容器ホールダー120を示す。懸垂手段110は、容器ホールダー120と一体に形成されてもよいし、または、容器ホールダーとは別に形成されてもよい。後者の場合、容器ホールダー120は、懸垂手段110の中に挿入可能となるように設計されてもよい。好ましい実施態様では、容器ホールダーは、プラスチックで製造され、懸垂手段は、金属、例えば、アルミニウムで製造される。
【0177】
ローターはさらに、容器ホールダー120、またはその懸垂手段110の水平回旋軸の周囲における最大回旋位置のストップを表す。このストップは、最大回旋角度に達すると、ストップがローター212の一部に接触するという点で、容器の最大回旋角度を定める。最大回旋角度は、回旋の外向き方向、すなわち、ローター212がその軸214の周囲に回転する時に生成される遠心力によって産生される回旋運動の方向にあることが好ましい。
【0178】
異なる懸垂手段110、または、懸垂手段110に容器ホールダー120を登載するための異なる方法を使用することによって、例えば、懸垂手段110において異なる濃度の容器ホールダー120を使用することによって、異なる最大回旋角度について異なるストップを定義することが可能である。例えば、90°、60°、45°、30°、および15°の回旋角度をサポートすることが可能である。
【0179】
それに加えて、容器ホールダー120の内向き方向の回旋運動にたいしてもストップを与えることが可能である。両ストップとも、遠心ローター212に登載してもよいし、または、遠心機200の、他の、ある部分に登載してもよい。ストップおよび遠心ローター212に関する、さらに詳細な記載が、特許出願EP05020948.5の39ページ11行から43ページ6行、図17および18、および特許請求項61から68に見られる。なお、上記セクションを、引用により、本出願の記載の中に含める。
【0180】
図4は、ローター軸214を含む断面にそって遠心ローターを切断する、側方断面を示す。回転軸214の周囲に回転可能に登載されるものは、モーターシャフト215、ローターウィール212、その上に登載される容器ホールダー120、およびローターディッシュ216である。モーター218は、その回転軸の周囲にモーターを駆動する働きをする。ローター軸の周囲に回転可能ではない、図示の要素は、遠心コンテナ220のコンテナ壁222、コンテナ壁を担持するコンテナキャリヤ226、モーター218の固定部分、および、モーター218の外壁と、コンテナ壁222の間のシール要素229の外、コンテナ壁222および遠心機の蓋の間の隙間を密封するためのシールリング228(図4には図示せず)を含む。それに加えて、モーターシャフト215の出力の保護リング215aは、モーター218の内部、および、遠心コンテナ220の内部を互いに遮蔽する働きをする。
【0181】
モーターシャフト215の出力、ローターウィール212、およびローターディッシュ216は、互いに接続される。ローターウィール212は、ユーザーによって交換することが可能である。このために、ローターウィールは、モーターシャフト215の出力のネジ要素を介してモーターシャフトの出力にネジ留めされ(モーターシャフト215の出力の最上要素)、さらに、回転運動を伝達するためのピンによってモーターシャフトの出力に接続される。ローターウィール212の中に、ピンを登載するための陥凹212aが与えられる。陥凹212aが絶対に不均衡を生じることがないように、さらに等化貫通孔212bが与えられる。
【0182】
さらに、図4の断面は容器ホールダー120も示す。この容器ホールダーは、図10においてさらに詳細に示される。容器ホールダーは、懸垂手段110、例えば、アルミニウム懸垂手段の中に挿入される。
【0183】
図5に示すように、懸垂手段110は、遠心ローター212において懸垂させることが可能である。このために、懸垂手段110は、この目的のために与えられる遠心ローター212の懸垂要素112bの中に懸垂手段を挿入するのに好適な軸部分112aを含む。懸垂手段110が遠心ローター212の中に懸垂されると、懸垂手段、およびその中に挿入された容器ホールダー120は、水平スピンドル113の周囲に回旋することが可能である。
【0184】
図4は、水平回旋軸に対し安静位置にある容器ホールダーを示す。遠心時に出現する遠心力によって、容器ホールダーは外向きに回旋される、すなわち、容器ホールダーの下方部分が、遠心軸214から遠ざかるように動く。図5に示すように、外向きの回旋運動を制限するためにストップが与えられる。このストップは、図5cに示すように、最大回旋αsが達せられると遠心ローターの交合辺縁114bと接触する、懸垂手段の辺縁114aによって形成される。ストップの他の詳細は、EP特許出願05020948.5の42ページ7行から43ページ6行に記載される。なお、上記セクションを引用により本出願の記載の中に含める。
【0185】
容器ホールダーは、安静位置に対して内向きに回旋することはできない。これは、ストップ212m(図4参照)、および/または遠心ローター212のストップ116bが、それぞれ、図4および5に示すように、懸垂手段110の対応する交合ストップ110mまたは116aと接触するという事実によって阻止される。
【0186】
生物試料を遠心する場合、容器ホールダー120の中に含まれる生物試料用容器は、閉鎖された蓋を持つ必要はない。実際、容器は、蓋をまったく持たなくともよいし、または、蓋は開放されていてもよい。例えば、図4に示す容器は、容器ホールダー120の蓋ガレージの中に保持される開放蓋を持つ。
【0187】
図3bおよび4に示す遠心ディッシュ216は、遠心スピンドル214に向かって内向きに延びる底部域を持つ。さらに、底部域は、内向きに曲線を描く外方辺縁域を持つ。この曲線は、遠心ディッシュ216の外方辺縁が、容器ホールダー120が遠心ローター212内に静止している時、容器ホールダーの下端および上端の間に配される高さにあることを意味する。
【0188】
さらに、遠心ディッシュ216は、内部、すなわち、ほぼその外縁の高さに延びる領域を定める。同時に、遠心ディッシュ216の外面および底面、すなわち、遠心コンテナ220に向かう側面は、比較的滑らかで、そのため、回転時の空気摩擦が最小となるように面を定める。しかしながら、遠心ディッシュ216は、遠心コンテナ220の上縁までは延びないので、それを介して、熱が、遠心コンテナの外壁222に向けて放出することが可能とされる、遠心コンテナ220の壁による空気交換が同時に可能である。これによって、より効率的な冷却が可能となる。
【0189】
図10は、容器160を保持するための容器ホールダー120を示す(図11b参照)。この容器ホールダーは、容器のために、三つの保持位置130、140、150を持つ。この保持位置は、同じ容器に与えられても、または、異なる容器に与えられてもよい。例えば、図10に示す容器ホールダーでは、保持位置140が、保持位置130および150の直径よりも大きな直径を有する容器のために与えられる。
【0190】
さらに、容器ホールダーは、液体を保持する働きをする容積122を有する。保持位置130、140、150は、液体を容積122に排出するための開口を含んでも、含まなくともよい。再び図11aを参照すると、保持位置130および140は、液体が、保持位置130に保持される容器の底部開口を通じて排出されて、容積122に進入することを可能とする開口を含む。しかしながら、保持位置150では、保持される容器を脱出する液体は、この保持位置が、固相の密閉壁によって囲まれているので、容積122に入ることができない。したがって、保持位置150そのものが容器としても作用することが可能である。
【0191】
図11aからdに示すように、容器ホールダー120の保持位置140の直径A2は、保持位置130および150の直径A3=A1よりも大きい。その結果、外径A2を有する保持位置140の中に、この保持位置への挿入を可能とする外径を有し、かつ、他の二つの保持位置の直径A3=A1に対応する内径を有する、第1容器170を挿入することが可能である。したがって、保持位置130および150が与えられる容器160は、この容器170の中に挿入することが可能である。
【0192】
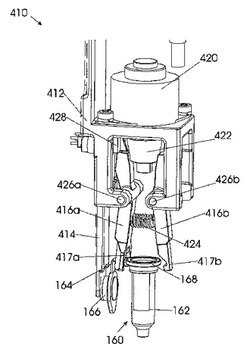
特に、この配置によって、容器160は、グリッパー、例えば、グリッパー400を介して、保持位置130から、保持位置140に保持される容器170の中に移送することが可能である。容器を移送するための類似の方法が、EP特許出願05020948.5のページ28、26行からページ31、8行に記載される。この部分を、引用により本出願の記載の中に含める。これらの方法は、グリッパー410(図9参照)、または同様のグリッパーを用いて実行してよい。
【0193】
容器ホールダー120によって保持される容器は、蓋を持ってもよい。そのような蓋166付き容器160が、例えば、図9に示される。図10に示すように、容器ホールダー120の蓋のために蓋ガレージ132、142、144が利用可能である。これらの蓋ガレージは、遠心時、蓋を、確定位置に固定するように構築される。蓋ガレージは、蓋ホールダー414による蓋166へのアクセスを可能とするように構築される(図9参照)。このために、蓋ガレージは、蓋ホールダー414が、それを介して蓋に接触可能とされる、開口133、143、145を含み、かつ、蓋のためのストップを含む。このため、容器ホールダー120から容器を排除する際、または、容器ホールダーの中に容器を挿入する際、蓋ホールダー414によって定められる位置を保持しながら、蓋をガレージから排除すること、または蓋をガレージの中に設置することが可能になる。
【0194】
保持位置140については、図11dに示すように、共に挿入される、二つの容器160、170のそれぞれの蓋に与えられる、二つの蓋ガレージ142、144が利用可能である。
【0195】
さらに、容器ホールダーは、ホールダー位置130、140を安定化するために働くサポート支柱136、146を有する。安定化をさらに強化するために、これらの保持位置は、容器ホールダー120の外壁に接続される。したがって、保持位置は、遠心時に出現する力に対抗して安定的に保持することが可能である。
【0196】
さらに、容器ホールダーは、位置決め開放要素、または位置決めカウンター要素124を持つ。この位置決めカウンター要素124は、図8に示すように、位置決め装置450の位置決めスパイクまたは位置決め要素452と嵌合する形状を有する。図8を参照しながら記載されるように、この嵌合によって、角度位置を固定または位置決めすることが可能である。嵌合はさらに、遠心機中の容器ホールダーの変位角を位置決めまたは固定することが可能である。位置決めカウンター要素124は、位置決め要素を受容するための腔を含む。
【0197】
位置決めカウンター要素124および位置決め要素450の間の嵌合は、位置決めカウンター要素124と位置決め要素450の間の、平面、すなわち、水平面方向における相対的動きを阻止するのに好適である。
【0198】
位置決めカウンター要素および、容器ホールダーの中央間の距離は、位置決めカウンター要素と容器ホールダーの辺縁間の距離よりも大きい。容器ホールダーの中央は、一般に、図5cに示す回旋軸113によって定められる。腔は、下方に向かって先細る、すなわち、腔の断面は、腔の内部に向かう方向にそって減少する。腔の辺縁の二つの対向点の隔たりは、深度、すなわち、位置決め要素を、腔に導入することが可能な移動深度よりも小さい。
【0199】
容器ホールダー120に関する、さらに別の局面が、EP特許出願05020948.5に記載される。なお、この出願を、引用により本出願の記載に含める。
【0200】
不均衡を完全に回避する、または最小化するためには、遠心機をなるべく均等に負荷することが有利である。このために、遠心機は、該遠心機がなるべく均等に負荷されることを確保するための手段を含む。この手段は、遠心ローター212が完全に占拠されない場合でも、ほぼ均一な負荷を実現する定規を含む。
【0201】
一実施態様では、定規は、遠心ローター212の自動的負荷のために使用されてもよい。別の実施態様では、定規は、手動負荷をチェックするために使用されてもよい。この場合、負荷が、定規と一致しない場合、または不均衡で十分に満足すべき分布を持たない時は、警告、またはエラーメッセージが発信されてもよい。同時に、負荷改善に関する指示が示されてもよい。
【0202】
定規は、例えば、遠心機が負荷される容器の重心が、ローター軸214と一致することを要求してもよい。このために、各容器は、その方向が、該容器が遠心ローターにおいて配置される、ローター軸214の周囲の角度に対応する、ベクトルと関連づけられてもよい。次いで、定規は、これらのベクトルの合計が、ゼロである、または、任意の閾値未満であることを要求してもよい。容器が様々の重さを持つ場合、ベクトル長は、容器の重量に比例する。
【0203】
自動的負荷に関しては、他の定規が与えられてもよい。例えば、B個の容器ホールダーによる、または複数の容器による、P個の位置の自動負荷のための定規が、均一分布を要求してもよい。もしもPがBで割り切れる場合は、遠心ローターの、正確に各(P/B)番目の位置が占拠される。もしもPがBで割り切れず、かつ、B′が、Bに比べて次に大きいPの除数である場合、さらに、(B′−B)個の空の容器または容器ホールダーに負荷し、B′個の容器が均一に分布されるようにしてもよい。
【0204】
その上に、ドライブの調節によって、遠心機のドライブ218の一部である加速センサーのデータから不均衡の検出が可能とされてもよい。この場合、エラーメッセージが生成され、その不均衡、または不均衡の時間平均が、任意の閾値を超過した場合、遠心操作が停止されてもよい。
【0205】
試料が遠心機に負荷され、または、遠心機から脱負荷され、または遠心機に移送されること、または、遠心機の試料の処理または分析のために工程を実行することが目論まれる場合、遠心機のローターの位置決めが可能とされ、および/または、その位置が検出可能とされると有利である。ローターの位置は、共時回転が不可能な参照角度に対する、遠心ローター上の一位置(例えば、遠心ローター212と共に共時回転することが可能な定められた要素、例えば、容器、容器用の保持位置、またはマーキング)の回転角度である。位置決めとは、位置の認識であるか、または、その位置への移動、またはその位置における保持または固定である。
【0206】
遠心ローターの調節部を、該ローターの位置決めのために使用することが可能である。所望の位置が調節部の中に存在する場合、調節部は、その位置への到達、および、任意に、ある一定の正確度で保持することを確保する。このようにして、例えば、個々の処理工程のために必要な容器ホールダーまたは容器は、適切な処理手段、ピペットユニット、またはグリッパー、または分析装置が考えられるが、そのような手段と相互作用を持つための位置に移動させられる。
【0207】
遠心機のドライブ218は、非同期モーターであってもよい。これは、通常、非同期モーターは、頑丈で、構築が安価で、高速で安定で、かつ、動作が滑らかであるという利点を持つ。しかしながら、サーボモーターと比べると、非同期モーターは、位置決めのために必要な調節データが直ぐには入手できないために、位置決めが難しいという欠点を有する。
【0208】
しかしながら、非同期モーターは、ベクトル調節と適合させることが可能である。ベクトル調節は、従来技術において、例えば、A.Fitzgeraldら、題名「電気機械(”Electric Machinary”)」(McGraw−Hill, 2003)による公刊物において記載される。ベクトル調節は、サーボモーターの調節に匹敵する、非同期モーターの調節能を与える。このようにして、高速における有利な振る舞い、および遠心ローターの位置決めの両方を実現することが可能である。
【0209】
それゆえ、記載される実施態様とは独立に、生物試料用の遠心機、好ましくは、遠心機ローターのドライブとしてベクトル調節付き非同期モーターを有する、実験用遠心機の提供が提案される。さらに、この非同期モーターは、ローターの回転軸の周囲の任意の回転角度においてローターを位置決めするための手段を装備する。好ましくは、この手段は、ローターの回転角度を決めるためのセンサーを含む。
【0210】
さらに、速度フィードバックを備える非同期モーターを介して位置決めを調製することも可能である。改良型U/f−特徴調節を備えた方法が提案される。この方法では、実際の電流値が検出され、速度調製器に供給される。次に、位置決めが、活性的S字状電流によって調整される。
【0211】
スパイクによる遠心機の機械的位置決め
その外に、位置決めは、遠心ローターと共時回転はしないが、遠心ローターと共時回転可能な、少なくとも一つの位置決めカウンター要素と相互作用を持つのに好適な位置決め要素を用いて実行することが可能である。この相互作用は、例えば、機械的嵌合、磁気的相互作用、またはマーキングの読み取りであってもよい。相互作用のためには、第1工程において、例えば、遠心ローターの調節によって、位置決めカウンター要素と、位置決め要素とが、互いに相互作用を持つ範囲内にあるように、荒い位置決めが既に実行されていると有利である。さらに、複数の位置決めカウンター要素を与えることも有利である。例えば、遠心ローターが位置決めされる全ての位置に対し、対応的に配置される位置決めカウンター要素を与えると有利である。
【0212】
位置決め要素450および対応する位置決めカウンター要素124の例が、グリッパーの記載においてより詳細に記載される(図8参照)。当業者であれば、本出願において同様に記載される、他の位置決め要素およびカウンター要素、特に、グリッパーユニットには付着されないが、例えば、遠心コンテナ222、または、装置1の作業プラットフォーム2に付着される要素についてどのように操作したらよいかを了知するであろう。
【0213】
グリッパーおよびピペットユニットのキャリッジ
図6は、グリッパーユニット400およびピペットユニット500を動かすためのキャリッジシステム300の斜視図を示す。このキャリッジシステム300は、固定的に登載されるX−レール312およびY−レール314を含む。Y−レール314は、スライド要素318を介してX−レールに接続される。このスライド要素318は、x方向にX−レールにそって滑走すること、したがって、Y−レール314をx方向に動かすことが可能である。
【0214】
Y−レール314をx方向に動かすために、ドライブ316およびドライブベルトが与えられる。このドライブベルトは、二つのローラーから懸垂される。ドライブは、これらのローラーの内の一方の回転を駆動することが可能である。回転は、ドライブベルトの進行運動に変換される。このために、ローラーおよびドライブベルトは、それらの間に嵌合が起こるような形状を持つこと、すなわち、ドライブベルトは歯付きベルトであることが好ましい。このドライブベルトは、固定手段を介してX−レールにしっかりと接続される。固定手段は、ドライブベルトの進行運動が、X−レールにそった、すなわち、x方向へのY−レールの運動が確かに起動されるようにする。
【0215】
さらに、キャリッジシステム300は、キャリッジ部材320を含む(図1c参照)。このキャリッジ部材320は、Y−レールにそってy方向に動くことが可能である。このために、キャリッジ部材は、Y−レール314にそって滑走することが可能なスライド要素328(図1c参照)に接続され、したがってスライド要素は、キャリッジ部材をy方向に動かすことが可能である。この運動を駆動するためにドライブ326が与えられる。スライド要素328およびドライブ326は、Y−レールをx方向に駆動するドライブ316と同様に構築される。ドライブ326は、Y−レールに接続されるが、キャリッジ部材320とは共に動かない。ドライブ316および326は、ステッピングモーターの形状を取り、そのため、xy方向におけるキャリッジ部材320の正確な位置決めが可能である。ステッピングモーターの調節は、図16を参照しながらより正確に記載される。平坦帯状ケーブル309が、キャリッジシステム300を調節ユニットに接続する。これは、図16に示す、インターフェイス871aおよび871bの間の接続ケーブルに対応する。
【0216】
キャリッジ部材320は、グリッパー400のための懸垂手段340を持つ。この懸垂手段は、z方向におけるグリッパー400の動きを可能とする。このために、懸垂手段340は、それにそってグリッパー400がz方向に動くことが可能となる、グリッパーレール345を含む(図8参照)。それに加えて、ドライブ348がこの動きのために与えられ、Y−レール314のドライブベルトの駆動と同様に、リフトベルト342を駆動する。リフトベルト342は、二つのローラー346a、bの上を導かれ、ドライブを介して動くことが可能である。グリッパー400は、締め固定具443によってリフトベルト342に付着され、そのため、リフトベルトが進むにつれて、グリッパーはz方向に動く。
【0217】
それに加え、グリッパーキャリッジは、ピペットユニット500のための懸垂手段350を含む。この懸垂手段350は、グリッパー400用の懸垂手段340と同様に、z方向におけるピペットユニットの動きを可能とする。特に、懸垂手段350は、リフトベルト352、それにそってピペットユニットがz方向に動くことが可能となるレール355(図7参照)、その周囲にリフトベルトが導かれるローラー356a、b、および、z方向へのピペットユニットの挙上運動を駆動するためのリフトドライブ358を含む。これらの要素は、グリッパーユニット400の対応要素と近似する。
【0218】
上記構築のおかげで、グリッパーユニット400と、ピペットユニット500とは、水平面において、すなわち、xおよびy方向に共に動くことが可能となる。さらに、グリッパーユニット400とピペットユニット500とは、垂直方向、すなわち、z方向では互いに独立に動くことが可能である。
【0219】
Y−レール、およびキャリッジ部材のドライブ316、326、および、グリッパーユニットおよびピペットユニットのドライブ348、358は、ステッピングモーターとして構築される。駆動されるユニットが構成位置に達した時点を検出するために、ホームセンサー319(図1c参照)、329(図6参照)が(ドライブ348、358に対しても;図示せず)与えられる。ステッピングモーターおよびホームセンサーは、グリッパー(図8、9)に関して、かつ、図16に関連して与えられた、その記載と同様の構成を持つ。
【0220】
ピペットユニット
図7は、ピペットユニット500の斜視図を示す。ピペットユニットは、図6に関連して示すように、z方向にレール355にそって動くことが可能なピペット部材501を含む。このために、ピペット部材501は、z方向にレール355にそって滑走することが可能なキャリッジ、またはスライドまたはロール要素545、および、z方向へピペット部材501が運動するための懸垂手段350を含む。懸垂手段350は、リフトベルト352、ローラー356a、b、および、リフトベルト352を駆動するためのドライブ358を含む。リフトベルトは、付着手段543によってピペット部材501に付着される。ドライブ358は、Y−レールのドライブ316と同様に構築される。ドライブ358は、レール355にそうスライド要素545の運動、したがって、z方向におけるピペット本体501の運動を駆動することが可能である。
【0221】
ピペットユニット500は、ピペットチップ730のためのピペットチップホールダー520を含む。図7では、ピペットチップ730は、ピペットチップホールダー520に押し込まれている。ピペットチップは、脱離可能に装着される、すなわち、ピペットチップは、ピペットチップホールダー520から取り外すことも、または、その上に設置することも可能である。ピペットチップホールダーの構築に関するさらに詳細な記載が、欧州特許出願06010976.6に見られる。なお、この出願を、引用により本明細書に含める。この出願は、軸方向に延びる長軸を有する結合要素を備えた、ピペットチップ保持用装置を提案する。
【0222】
ピペットチップホールダー520の上にピストンチューブ518が登載される。ピペットチップホールダー520は、ピペットチップ730の内部と、ピストンチューブ518の内部との間で、ガスまたは圧の交換が可能となるように構築される。ピストンチューブ518とピペットチップ730の内部は、外部に対し密封され、そのため、内部と外部の間のガスの交換は、ピペットチップ730のピペット開口732を通じてのみ可能となるようになっている。外部に対するピストンチューブ518の減圧は、ピペットチップに伝達され、そのため、ガスまたは流体を、ピペット開口732を通じてピペットチップ730の内部に吸引することが可能となる。同様に、ピストンチューブ518における過剰圧では、ガスまたは液体が、ピペット開口732を通じてピペットチップ730の外部に強制的に排出させられる。
【0223】
減圧または過剰圧を生成するために、ピペットユニット500はピストンシステム510を含む。このピストンシステムは、ドライブ512、および、z方向にピストンレール515bにそって移動が可能なピストンキャリッジ515aを含む。ピストンシステムはさらに、ドライブ512の回転運動を、ピストンキャリッジ515aのリフト運動として伝達するための、伝達システム514を含む。伝達システム514は、ウォームギアとして構築される。ピストンシステムはさらに、固定具517によってピストンキャリッジ515aに付着されるピストン516を含む。したがって、ピストン516は、ピストンチューブ518の中に、該チューブを気密に封印するように配置される。
【0224】
ピストンシステムはさらに、ピストンキャリッジの、したがって、ピストンの較正位置を検出するためのホームセンサー513を含む。このホームセンサーは、後述のグリッパー(図9参照)のホームセンサー428と同様に構築される。好ましい実施態様では、リフト要素のドライブ512はステッピングモーターである。この実施態様では、較正された開放状態が検出可能とされる場合、ピストンの各挙上状態が、較正された開放状態から始まる、ステッピングモーターのステップをカウントすることによって検出可能とされる。ピストンの移動と、吸引または排出される流体の容量の間には一定の関係がある。
【0225】
ピストン516およびピストンチューブ518は、シリンジを与える。前述の欧州特許出願06010976.6に記載されるピペットチップホールダーは、直接このシリンジに、特に、ピストンチューブ518に付着されると有利である。この配置により、ピペットユニット500の特にコンパクトな設計が可能となる。
【0226】
ピペット開口732が液体に浸され、ピストン516が挙上されると、ピストンチューブ518のガス容量の増加が、ピストンチューブ518およびピペットチップ730内部に減圧を生成する。この減圧によって、流体が、開口732を通じてピペットチップ730の中に吸引される。吸引される液体の容量は、ピストンチューブ518中のガス容量の増加に対応する。
【0227】
ピペットチップ730が液体を含み、かつ、ピストン516が一定の高さに保持される場合、該液体はピペットチップの中に保持される。
【0228】
ピペットチップ730が液体を含み、かつ、ピストン516が下降すると、ピストンチューブ518中のガス容量の減少は、ピストンチューブ518およびピペットチューブ730の内部に過剰圧を生成する。この過剰圧によって、液体は、開口732を通じて、ピペットチップから外に輸送される。排出される液体の容量は、ピストンチューブ518のガスの減少容量に対応する。
【0229】
ピペットチップを受容するために、ピペット部材501は、ピペットチップホールダー520と共に、ピペットチップステーション720(図1および図12を参照)に配される、適切なピペットチップ730の上に動かすことが可能である。ピペット部材501は、ピペットチップホールダー520が、約10−50Nの力でピペットチップの中に押し込まれるように、下方に向かって動かされる。次に、ピペットチップは、例えば、ピペットチップホールダー520の外周面を取り巻くシールの圧迫によって、該ピペットチップホールダー中に保持される。この種のシールは、欧州特許出願06010976.6に記載される。この出願に対する参照を再び行っている。
【0230】
ピペットチップ730を廃棄するために、廃棄物のための処分システム740が、図1bの平面図に示すように与えられてもよい。この処分システム740は、大きな断面積を持つ区域744および小さな断面積を持つ区域746を持つ開口742を含む。区域744の大断面積は、ピペットチップ730が貫通可能となるように設計される。区域746の小断面積は、ピペットチップ730は貫通することができないが、ピペットチップホールダー520は貫通可能となるように設計される。
【0231】
処分の場合、ピペットユニット500は、ピペットチップ730を持つピペットチップホールダー520が、大断面積を持つ区域744の上にあるように動かされる。次に、ピペットチップ730を持つ、このピペットチップホールダー520は下降され、ピペットチップが、開口742の中に押しこまれる。次に、ピペットチップ730を持つピペットチップホールダー520は、小断面積区域746の中に動かされ、ピペットチップホールダー520が、開口742から引き抜かれる。ピペットチップ730は、例えば、その上縁において、開口区域744の辺縁によって保持され、したがって開口742の下に留まる。一旦ピペットチップホールダー520が完全に開口から排除されると、ピペットチップ730は、ピペットチップホールダーから自身を引き離し、開口742の下に与えられた使用済みピペット用コンテナの中に落下する。
【0232】
ピペット操作の全体手順をこれから記載する。ピペット操作のために、ピペットユニットは、何よりも先ず、前述のようにピペットチップを摘みあげる。次に、この、摘みあげられたピペットチップ730は、吸引すべき液体を保持するコンテナの上にピペット本体501と共に動かされ、下降して該コンテナ中に入る。
【0233】
ピペット操作中、ピペットチップ730がコンテナの中に下降される前に、コンテナの充填レベルが既知であるか、または定量されていると有利である。このことは、後述の充填レベルを測定するいくつかの方法の内の一つ、例えば、超音波ユニット830を用いる方法を用いて実行することが可能である。次に、ピペットチップ730は、前述の実施態様とは独立に、充填レベルに応じて容器の中に全体として下降させることが可能である。これは、例えば、ピペットチップにおいて滴がほとんど形成されないように、充填レベルとの対応を選択することが可能であるという利点を有する。
【0234】
次に、所望量の液体がピペットチップ730の中に吸引され、ピペットチップ730は、標的容器の上に動かされ、所望量の該液体が、ピペットチップから標的容器の中に放出される。標的容器中の液体によるピペットチップのコンタミネーションを回避しなければならない場合は、ピペットチップが、標的容器の上のある高さに置かれると有利である。これは、標的容器中の液体、または、標的容器の壁または辺縁との接触を排除するからである。
【0235】
基本的に、コンタミネーションを阻止するために、ピペットチップ730を交換するのが有利である。なぜなら、もしそうしないと、サンプルのコンタミネーション、またはサンプル同士のクロスコンタミネーションの危険性が生じる可能性があるからである。このために、ピペットチップは、前述のように、廃棄物処分ステーション740の中に廃棄され、新しいピペットチップが、前述のように摘みあげられる。
【0236】
グリッパーユニット
図8は、グリッパー400の斜視図を示す。グリッパーは、図6に示すように、レール345にそってZ方向に動くことが可能なグリッパー部材401を含む。このために、グリッパー部材401は、ピペットユニット500の対応要素(図7の記載を参照)と同様に、レール345のためのキャリッジ445、および、リフトベルト342を有する懸垂手段340、ローラー346a、b、およびドライブ348を含む。
【0237】
グリッパーユニット400は、容器160を把捉するためのグリッパー410を含む。グリッパーの詳細な図面が図9に示される。グリッパーは、剛性のグリッパー筐体を含む。グリッパーはさらに、二つのグリップアーム416a、416bを含む。このグリップアームは、グリッパー筐体412において、それぞれ、スピンドル426a、426bから懸垂され、かつ、それぞれのスピンドルの周囲に回旋可能である。グリップアームが閉鎖方向に回旋されると、二つのアーム416a、416bは、容器の把捉区域において互いに向かって動き、したがって、容器160をその頸部168において把捉することが可能となる。容器をその頸部168において把捉するために、頸部168に適合する陥凹417a、417bが、グリップアーム416a、bの、それぞれの把捉域に与えられる。
【0238】
容器160の把捉のために、ドライブ420が与えられる。このドライブは、リフト要素422の移動を駆動する。リフト要素の移動は、グリップ要素の二つの上肢を押して引き離し、そのため、下肢、すなわち、上肢からは、スピンドル426a,bの反対側に配される肢は、互いに向かって押しつけられる。下肢は、容器のための把捉域を含む。したがって、前述の運動は、閉鎖方向の運動であり、下肢の圧迫は、容器160の把捉を可能とする。
【0239】
容器160を解除するために、ドライブ420は、リフト要素422を反対方向に、すなわち、図9において上方に動かすことが可能である。このようにして、アーム416a、416bの二つの上肢は、リフト要素422による引き離され方がより小さくなる。その結果、バネ、または弾性要素424が、二つの上肢をさらに互いに向けて押しつけることが可能となる。このようにして、グリッパーは開放方向に動かされ、容器は解除される。
【0240】
同図において、弾性要素424は、グリップアーム416a、416bの下肢域における圧縮バネとして示される。しかしながら、例えば、バネが、上肢域における弾性引っ張り要素の形状を取る別態様も可能である。弾性引っ張り要素は、リフト要素422と不要な衝突を起こすことがないように注意しなければならない。これは、引っ張り要素に、例えば、二つの上肢の間に差し渡される弾性リングの形状を取らせることで可能である。
【0241】
グリッパーの開放状態を検出するために、グリッパー410はさらに、グリッパーが開放しているか、閉鎖しているかに関する情報を含むセンサー信号を発信するホームセンサー428を含む。このために、ホームセンサー428は、例えば、その光路が、グリッパーの状態に応じて、グリッパーの四肢によって中断されるか、または中断されない、光ビームを含んでもよい。このようにして、ホームセンサーがその状態を変える開放状態、例えば、光ビームの光路が、貫通状態から、中断状態に変化する状態を検出することが可能である。可能な一実施態様では、較正開放状態は、例えば、グリッパーが最大限度開放した開放状態である。
【0242】
ある好ましい実施態様では、リフト要素のドライブ420はステッピングモーターである。この実施態様では、較正開放状態が検出可能とされる場合、グリッパーの各開放状態が、較正開放状態から始まる、ステッピングモーターのステップをカウントすることによって検出可能とされる。例えば、図16に示す、他のホームセンサーも類似の機能を持つ。
【0243】
以上に加えて、グリッパー410は蓋ホールダー414を含む。蓋ホールダー414は、グリッパー筐体412に剛強に接続される。蓋ホールダー414は、容器の蓋166に対しストップを与える。蓋166は、蓋166を容器160に接続し、したがって蓋を固定位置に位置決めするか、または保持する接続要素164の弾性力によってストップに対して押しつけられる。グリップアーム416aは、その外に陥凹を含む。該陥凹は、その中を接続部材164が貫通することが可能となるように設計される。この陥凹、および蓋ホールダー414を介して、グリッパー410に対し容器160を配向させることが可能となる。しかしながら、グリッパーはさらに、蓋166を含まない容器160を把捉してもよい。そのような場合、配向は与えられない。
【0244】
再び図8を参照すると、グリッパー410は、スピンドル436aの周囲に回転可能に登載される。グリッパー410は、回転装置430によってスピンドル436aの周囲に回転させることが可能である。回転デバイス430は、回転ドライブ431、ドライブギア434、もう一つのギア436、およびホームセンサー438を含む。回転ドライブ431は、ドライブギア434を駆動するように配置される。ドライブギア434は、前記別のギア436と嵌合する。グリッパー410は、別のギア436と固定的に接続され、該ギアと共に、回転スピンドル326aの周囲に回転することが可能である。
【0245】
回転ドライブ431は、グリッパー410の所望の角度が、回転軸436aの周囲に調整可能となるように、ステッピングモーターとして構築されるのが好ましい。ホームセンサー438は、グリッパー410が回転して、元のまたは較正位置に戻り、したがって、ステッピングモーター431を調節するための較正点を構成しているかどうかに関して情報を供給する。較正点の機能は、前述のグリップアーム416a、bの較正開放状態の機能と同様である。
【0246】
グリッパー400は、グリッパー410の回転装置430によって、少なくとも120°回転可能となるように構築されるのが好ましい。
【0247】
その上、グリッパー400は、遠心機200の容器ホールダー120のための位置決めデバイス450を含む。この位置決めデバイス450は、位置決めスパイク452を含む。この位置決めスパイクは、容器ホールダー120の対応する位置決め開口124に嵌合することが可能である。さらに一般的に、位置決め要素452は、容器ホールダー120の、位置決めカウンター要素124と嵌合する、または、例えば、電磁力によって位置決めカウンター要素と相互作用を持つことが可能となるように構築される。位置決めスパイクのための位置決め開口を有する、この種の容器ホールダーが、例えば、図10に示される。この嵌合によって、グリッパー部材401が、容器ホールダー120に対して定められた位置に設置されることが確保される。
【0248】
その上、位置決めデバイスは、位置決めスパイク452に接続される位置決め部材451を含む。この位置決め部材451は、グリッパー部材401とは独立に、Z方向に位置決めレール456にそって動くことが可能である。このために、位置決め部材451は、位置決めレール456にそってZ方向に滑走することが可能な位置決めキャリッジ457に接続される。その外、位置決め部材は、固定具458a、bを用い、位置決めバネ458によってグリッパー部材401に接続される。位置決めバネ458は、グリッパー部材401に対する位置決め部材451の運動のためのリセット力を与える。位置決めバネは、容器の把捉時、位置決めスパイク452によって、十分な力が、位置決めカウンター要素124に対して適用され、そのため、これらの二つの要素間における嵌合が確保されるようにする。その力は、1と10Nの間にあることが好ましく、1と5Nの間にあることが好ましい。
【0249】
図示の実施態様とは独立に、バネの挙上範囲(すなわち、位置決めバネ458が、位置決め要素452を位置決めカウンター要素124に押しつける、容器ホールダー120に対する、z方向のグリッパー部材410の高さ間隔)は、容器ホールダー120からの容器の160の排除、または、該ホールダーへの容器の挿入の際、要求を満たすように選ばれる。例えば、位置決め要素452および位置決めカウンター要素124の間の嵌合が、保持位置からの容器の160の排除、または、保持位置への容器の挿入の全行程を通じて維持され、その間、容器は、容器ホールダーと接触を維持するか、または、容器ホールダーから完全には排除されないか、または、部分的だけでも挿入されるように選択されると有利である。
【0250】
グリッパー410は、例えば、生物学的流体用の下記の容器を把捉するのに好適である。
−蓋無しの、スピンチューブ160、エッペンドルフチューブ170、または同様の容器。これらの容器は、外側から、グリップアーム416a、416bによって把捉される。任意に、一つ以上の陥凹417a、417bが、容器の頸部に嵌合する。
−蓋166、176付きの、スピンチューブ160、エッペンドルフチューブ170。蓋無し容器の場合と同様に、その外、任意の蓋ホールダー414が、前述のように蓋166、176を確保する。
生物学的流体用容器は、ここでは、そのような液体を受容するためのもので、その液体と接触する成分と定義される。
【0251】
その外、グリッパー410および容器ホールダー120は、グリッパーが、容器ホールダーを把捉することが可能となるように構成することが可能である。このために、容器ホールダーの一部は、グリッパーを介して把捉するように設計される。例えば、保持位置150は、図10に示す容器ホールダーとは対照的に、グリッパーが、容器と同様にそれを把捉できるように、頸部を備えていてもよい。一方、容器ホールダーは、任意の蓋ホールダー414が、把捉操作を妨げないように設計されることが好ましい。さらに、蓋ホールダーは、容器ホールダーの配向を定めるように、例えば、保持位置150によって定められる、軸周辺の回転角度を定めるように、適切な構成の容器ホールダーと共に使用されてもよい。
【0252】
グリッパーは、容器160を、別の容器170に設置するのに好適である。この挿入は、保持位置130、150に容器160を設置するのと同様に実行される。別容器170は、容器ホールダー120の保持位置140にあることが好ましい。容器ホールダー120は、遠心機200の中に配されることが好ましい。
【0253】
グリッパーは、別の容器170から容器160を排除するのに好適である。この排除は、保持位置130、150から容器160を排除するのと同様に実行される。別容器170は、容器ホールダー120の保持位置140に配されることが好ましい。容器ホールダー120は、遠心機200の中に配されることが好ましい。その外、排除操作の間、保持位置140の中に別容器170を固定するための装置を与えると有利である。このような装置は、例えば、別容器170に対し、該容器の上側または辺縁において接触して、該容器を押し下げる圧迫要素(図示せず)の形状を取ってもよい。このような圧迫要素は、バネによって、例えば、位置決め要素452に対するのと同様にあらかじめ張力を与えることも可能であるし、または、位置決め要素452と一体的に形成されてもよい。
【0254】
前述のように、グリッパーのドライブ420、431、441は、ステッピングモーターとして設計される。駆動されたユニットが構成位置に達した時点を検出するためにホームセンサー428、438、および448が与えられる。ステッピングモーターのステップ数をカウントすることによって、較正位置から始まる駆動ユニットの各位置を検出することが可能である。ホームセンサー428、438、および448は、光ビームとして設計される。較正位置に達すると、光ビームの光路が中断される。
【0255】
さらに別態様として、ホームセンサーは、較正位置に達すると、光ビームの光路が開放されるように設計されてもよいし、または、接触センサー、または他のセンサーとして構築されてもよい。
【0256】
ヒーター/攪拌器
図13および14は、サンプルまたは液体を加熱および攪拌するためのユニット600の図を示す。このユニットは、例えば、手順の分解工程を実行するのに使用してもよい。さらに、このユニットは、サンプルを加熱および/または攪拌しなければならない、他の手順工程のために使用されてもよい。同時に、ユニットは、生物試料のために定められた保持位置を与える。したがって、さらに、加熱および攪拌用のユニット600は、装置のサンプルホールダーとして作動してもよい。
【0257】
図13に示すように、加熱および攪拌用ユニット600は、作業プラットフォームの高さのために与えられる、作業プラットフォーム用挿入体602を備える。その外、ユニット600は、12個の容器保持位置612を持つ容器キャリヤ610を含む。この容器キャリヤは、ユニット600に保持され、手動で該ユニットに挿入することが可能な容器に対して適応される。いくつかの別タイプの容器が使用される場合、異なるタイプの容器キャリヤが与えられてもよい。次に、ある任意の手順に好適な、特定の容器キャリヤを、ユニット600に設置することが可能である。この場合分類をより簡単にするために、容器キャリヤには番号が与えられる(図14bを参照されたい、同図では、容器キャリヤは数字”2”を帯びる)。
【0258】
図示の容器キャリヤ610は、任意に蓋を持ち、6個の容器が2列に配される、12個の反応容器(例えば、エッペンドルフキューブ、またはその他の容器)のために設計される。図14aの断面図に示されるように、一列、すなわち、保持位置の内の6個は、1.5ml方式のために、他列は2ml方式のために設計される。容器キャリヤ610は、反応容器の蓋を受容するための蓋保持位置616を持つ。さらに、この蓋保持位置616は、例えば、スロット、溝、またはポケットの形状を取ってもよい。容器キャリヤ610は、容器をその中に保持したまま、または、サンプルをその中に含んだまま、まとめて挿入および排除することが可能である。その結果、容器キャリヤ610は、装置の外側において負荷されることが可能である。容器キャリヤは、容器が、ヒトの裸の手で挿入および排出が可能となるように構築されていてもよい。それとは別に、容器が、一方の上に他方を被せた2枚の実験用手袋を用いて挿入および排出が可能となるように構築されてもよい。さらに、容器キャリヤは、容器が、機械によって挿入および排出されるように構築されてもよい。この場合、蓋保持位置616が与えられる場合、グリッパー410(図9参照)に与えられる任意の蓋ホールダー414が蓋にアクセスすることが可能となるように、該蓋保持位置を設計すると有利である。
【0259】
この12個の保持位置を備える容器キャリヤ610によって、最大12種の異なるサンプルについて平行的処理が可能となる。異なるサンプルを平行的に処理する場合、割り当ての誤りを避けるために、容器キャリヤを明瞭に位置決め可能とすると有利である。明瞭な位置決めのための装置を、例えば、図13に示す。この装置では、方向性要素618、例えば、レール、陥凹、またはスロットが、容器キャリヤ610に与えられ、発振フレーム634には、対応するカウンター要素619が登載され、そのため、容器キャリヤ610は、一方向においてしか発振フレーム634中に挿入されないようになっている。さらに、割り当ての誤りを避けるために、保持位置612を、例えば、図14bに示すように、記数法613を介して表示すると有利である。
【0260】
図13は、さらに、加熱要素622および熱移送要素626を含む加熱システムを示す。図13の実施態様に示すように、熱移送要素626が、容器キャリヤ610に挿入された容器と直接接触するように、熱移送要素626および容器キャリヤ610が構築されていると、加熱システムの効率が増す。熱移送要素626は、熱伝導性がλ>30W/(mxK)であることが好ましく、もっとも好ましくはλ>100W/(mxK)である。
【0261】
熱移送要素626は、例えば、ネジ接続を介してヒーター600に接続される。容器方式が変更した場合、要素626も変えられてよい。さらにそれとは別に、熱移送要素626は、容器キャリヤ610の一部として構築されてもよい。次に、容器キャリヤのこの部分は、熱伝導性試料、例えば、熱伝導性金属を含むことも可能である。次に、容器方式が変更した場合、変更しなければならないのは容器キャリヤ610だけである。
【0262】
図示の実施態様では、サンプルは、70℃の温度まで加熱することが可能である。室温から55℃までの範囲の加熱時間は約5分である。容器キャリヤ610に挿入された容器中の流体に要求される温度の正確度は、±3K(55℃において)である。温度の正確度は、流体の標的温度からの種々の変位、例えば、加熱器の標的温度からの変位、または、ヒーター内部における温度差に関連する。
【0263】
加熱要素626は、約100Wの出力を持つ電気加熱要素である。その中には、二つの、別々の加熱回路が与えられる。加熱回路の電力の有利な分割は、第1加熱回路に対して70W、第2加熱回路に対して30Wである。
【0264】
温度調整は、温度センサー、例えば、タイプPT1000を読み取ることが可能である。加熱は、加熱時間および温度正確度に関して前述の仕様を実現することが可能な規模を持つ。電力回路には、直列に接続される温度安全装置が存在する。これは、自己再設定的ではない。図示の実施態様では、能動的冷却はない。
【0265】
さらに、容器キャリヤ610は、加熱要素620に対し、手保護器および断熱部として設計されてもよい。このようにして、ユーザーに対する火傷の危険を回避または低減することが可能となる。例えば、容器キャリヤは、熱伝導性がλ<5W/(mxK)、より好ましくはλ>2W/(mxK)であるハンドル部分を持ってもよい。
【0266】
その外、容器キャリヤ610は、断熱性試料、例えば、セラミックまたはプラスチックによって製造されてもよい。これは、その絶縁性が、熱損失も減らすという付加的利点を持つ。使用されるプラスチックは、例えば、121℃で20分のオートクレーブ処理を耐忍する、オートクレーブ処理可能なプラスチックであってもよい。
【0267】
いくつかの手順の分解工程は、サンプルが機械的に攪拌されることを必要とする。このために、図13の実施態様は、攪拌器/ヒーター600の中に一体化される攪拌システム630を含む。この攪拌システム630は、装置1に付着されるドライブブロック636、および、動くことが可能で、ドライブブロック636によって、作業プラットフォーム2に対して発振させることが可能な発振プラットフォーム632を含む。前述の加熱システム620および容器キャリヤ610は、発振プラットフォームの上に、これらの要素が、発振プラットフォームと共に共振するように登載される。
【0268】
ドライブブロック636は、例えば、公刊物EP 1 201 297の中に記載される。これは、攪拌運動を生産するための電気ドライブを含み、四つの別々のコイルから成る十字形配置を含む。これらは、ステッピングモーターによって活性化される。しかしながら、このドライブは、他の、任意の、所望の電気ドライブであることも可能である。攪拌運動の意味するところは、交互の振動運動、または、重心の回りの回転運動、または、それらの、または類似の運動の組み合わせである。
【0269】
本実施態様では、攪拌システム630は、回転攪拌器として構築される。これは、攪拌運動の振幅が約2mm(ピーク・ツー・ピーク)、および、最大攪拌周期または攪拌速度が2000rpmを超えるものを可能とする。攪拌運動は、飛沫の飛散、したがって、サンプル間のクロスコンタミネーションができるだけ回避されるように設計される。このために、攪拌運動は、一平面において起こり、ごく僅かしか、まったは全く垂直成分を持たない。この攪拌システムでは、作業プラットフォームのためのドライブブロック636および挿入体602は、作業プラットフォームに対して固定される。図13に示す他の要素は攪拌される。
【0270】
サンプル容器のためにスクリーンまたは遮蔽物を与え、それによって、攪拌運動の際に生産される可能性のある、何かの飛沫が、捕捉されてクロスコンタミネーションを招くことがないようにすると有利である。遮蔽物は、分離要素、例えば、分離壁を有する容器キャリヤ610を適切に設計することによって獲得することが可能である。この種の分離要素は、図13および14には示されていない。これらの分離要素は、容器ホールダー610と一体化される、隣接容器保持位置612の間に設けられる分離壁として生産されてもよい。分離壁は、容器が容器保持位置の一つに挿入された場合、該容器保持位置612に与えられる容器の、少なくとも上縁の高さに対応する高さを持ってもよい。分離壁の高さは、容器の上縁の高さよりも3から7mm高いことが好ましい。それとは別に、スクリーンはさらに、容器キャリヤ610に設置が可能で、分離要素を与える、新たに加えられる、別の部分を介して生産されてもよい。分離要素は、ピペットユニット500および/またはグリッパー400が依然として容器に対してアクセスが可能となるように構築されることが好ましい。
【0271】
さらに、発振プラットフォームが、定められた安静位置で停止可能であると有用である。例えば、発振プラットフォームをストップまで運び、定められた安静位置におけるこのストップに対し該プラットフォームを位置決めすることが可能となるように、電磁石を攪拌器に配置してもよい。それとは別に、ドライブブロックには、例えば、定められた安静位置に位置決めするための手段、例えば、グリッパーのドライブと同様、ホームセンサーを有するステッピングモーターを与えてもよい。
【0272】
ヒーター/攪拌器600については、他の、代替実施態様も可能である。例えば、攪拌システムを持たない加熱要素だけ、または、加熱要素を持たない攪拌システムだけでも、それぞれの場合他方のシステムが不要であれば、使用が可能である。さらに、他の機能を付け加えてもよい。例えば、冷却、例えば、空気、水、または熱電気冷却による冷却を用いてもよい。さらに、この冷却操作は、遠心機の冷却部230、250(図3参照)と組み合わせてもよい。
【0273】
その外、保持位置612の配置も変えることが可能である。図13および14は、6x2保持位置から成るマトリックスであるが、n x m個の保持位置を持つ、他の配置も可能である。他の、可能な代替配置としては、例えば、円形または六角形配置が挙げられる。
【0274】
容器キャリヤ610の保持位置612を、遠心機200の保持位置の配置と対応するように配置すると特に有利である。この利点は、容器キャリヤ610の保持位置612と、遠心機の保持位置とを協調させることが特に容易となることである。特に、容器キャリヤ610が、処理されていないサンプルのサンプルホールダーとして使用され、かつ、遠心機が処理済サンプルを与える場合、このようにすると割り当ての誤りの危険が低減される。
【0275】
保持位置612の配置は、図13および14に示す実施態様では、熱移送要素626によって指定される。しかしながら、さらに、例えば、液体浴を用いる別の加熱システム、または、容器キャリヤと一体化される熱移送要素であれば、保持位置612の配置についてさらに大きな屈曲性が可能とされる場合がある。
【0276】
消耗品ステーション
図12は、消耗品700のための、消耗品ステーションの斜視図を示す。この消耗品ステーションは、流体を処理するためのコンテナステーション710、ピペットチップ730のためのピペットチップステーション720、および、処理流体を有する、別の容器ホールダー714、716を含む。
【0277】
流体処理用コンテナステーション710は、処理流体を有するコンテナ712のための6個の保持位置を含む。手順に応じて、異なる処理流体を使用してよい。使用される処理流体の例としては、結合−洗浄−溶出工程を実行するためのバッファー流体がある。それに加え、コンテナステーション710は、消耗品のための消耗品ステーション700からステーション710を排除するためのハンドル718を含む。さらに、ハンドル718は、コンテナステーション710が、ステーション700に挿入可能とされる明瞭な方向性を指示する。
【0278】
さらに、消耗品ステーション700は、さらに処理流体を含む、コンテナのための保持位置716、714を含む。これらのコンテナは、コンテナ712に近似するが、ほんの少量だけ使用された処理流体のために与えられる。ステーション714および716は、ステーション714が、容器の蓋のための蓋ホールダーを含む点で異なる。したがって、例えば、さらにエッペンドルフチューブも、この中で容器として使用することが可能である。逆に、ステーション716は、蓋ホールダーを持たず、それゆえ、蓋またはネジ閉鎖を持たない容器のためにのみ使用される。
【0279】
その上、図12は、ピペットチップステーション720を示す。これは、消耗品のための消耗品ステーションから取り出すことが可能である。ピペットステーション720は、ピペットチップ730のための、複数の保持位置を含む。図は、二つのピペットチップステーション720で、例えば、保持するピペットチップの性質において異なる二つのステーションを示す。例えば、この二つのピペットチップステーションのピペットチップのピペット容量が異なっていてもよい。
【0280】
ピペットチップのタイプの認識を可能とするために、ピペットチップステーション720は、マーキング721、722を有する。これらのマーキングは、例えば、光学センサーを用いて検出可能とされる突出要素として構築される。各マーキングは、突出要素が存在する(1)か、または存在しない(0)かに応じて、1ビットの情報を運ぶことが可能である。したがって、要素721、722は、2ビットの情報、すなわち、1から4までの数字に対応する情報を運ぶ。したがって、図示の実施態様では、四つの異なる読み取り可能な状態を識別することが可能である。これらの状態の内三つは、ピペットチップの異なるタイプと関連するが、4番目の状態は、「ピペットチップが存在しない」ことを示す。
【0281】
マーキング721、722の別形も可能である。例えば、マーキングは、光の異なる吸収または反射を持つように表面をコートしたコンテナ部分を有することによって与えることも可能である。さらに、マーキングの性質も、例えば、色彩コード、または、磁気的に読み取り可能なコードによって置換してもよい。さらに、図12に示したコードビットの数も変動が可能である。別態様として、例えば、読み取られるマーキングの数は、1、3、4、または別の数を与えることも可能である。
【0282】
要素721、722は、ピペットチップステーションの、二つの短辺にそって点対称となるように設計される。その結果として、マーキングは、転回に対する保証として登載される、すなわち、ピペットチップステーション720が、消耗品ステーション700において二つの可能な方向性の内のどちらを取ろうと、それとは無関係にマーキングを読み取りすることが可能である。図12は、ビット列1−1に対応するマーキングのタイプ、すなわち、両マーキングが存在することを示す。
【0283】
その上に、ピペットチップステーション720は、陥凹724およびストリップ725を含む。このストリップ725は、図12に示すように、陥凹724に挿入可能とされ、したがって、二つの隣接ピペットチップステーション720を連結可能とするように設計される。
【0284】
その上に、ピペットチップステーション720は、それによって、消耗品ステーション700の中へ、または、該ステーションから外へ、手動による挿入および排除のために把捉することを可能とする、二つの、向き合うハンドル要素726を含む。挿入時、ハンドル要素726の下に配置されるフック部分は、消耗品ステーション700と噛みあう。排除のためには、フック要素は、ハンドル要素726を再び同時に押すことによって解除される。
【0285】
さらに、消耗品ステーション700は、それによって、該ステーションを作業プラットフォームから排除すること、または、該ステーションを作業プラットフォームの中へ挿入することが容易になるホールダー708を含む。
【0286】
廃棄物ステーション
図1に示す廃棄物処分システム740の下部には、廃棄物、例えば、使用済みピペットチップ、またはカラム、または他の容器などのための受容コンテナがある。さらに、作業プラットフォームにおける自身の開口を通じて到達することが可能な、廃棄流体のための受容コンテナが任意に与えられる(図示せず)。
【0287】
ピペットの処分が、図7を参照しながら記載される。他の、任意の廃棄物を処分するために、ピペットは、開口748を通じて、受容コンテナの中へ投げ込むことが可能である。例えば、処理のために使用されたが、もはや必要とされない流体は、開口748を通じて、放出する、例えば、ピペットアウトすることが可能である。さらに、もはや必要とされない容器、例えば、フィルター容器は、開口748を通じて処分することが可能である。
【0288】
種々の受容コンテナを、共に、廃棄物用受容装置の中に、別々の容器として、または共通の容器として配置することが好ましい。受容装置は、一体として取り出すことが可能となるように構築されてもよい。例えば、受容装置は、図2aの廃棄ステーション750について図示されるように、ディスプレイ910の下から排除することが可能な引き出しの形を取ってもよい。
【0289】
調節部およびセンサー
図15は、生物試料を処理するための装置の活性化を線画で示す、高度に単純化した模式図を示す。調節部は、コンピュータ870a′、インプットおよびアウトプットユニット870b′、外部装置と交信するためのインターフェイス870c′、および、装置1の調節部分、例えば、モーター、ステッピングモーター、光ビームのためのインターフェイス862′を含む。これらすべての構成要素はボード870′またはいくつかのボードに分配される。
【0290】
コンピュータ870a′は、プロセッサー、作業メモリー、オペレーティングシステム、好ましくは埋設OS、および、各種調節機能を実行するためのプログラムを含む。作業メモリーには、中でも特に、一つ以上のプロトコール、および、該プロトコールを実行するためのパラメータが保存される。
【0291】
インプットおよびアウトプットユニット、またはユーザーインターフェイス870b′は、ディスプレイ910を調節するためのグラフィックコントローラー、および、例えば、キー、および/または、タッチスクリーンの形を取ってもよいグラフィックディスプレイを用いる、インプットを受容するためのインプットインターフェイスを含む。インターフェイス870c′は、例えば、イーサーネットインターフェイス、USBインターフェイス、RS232インターフェイス、または他の通例のインターフェイスであってもよい。さらに、インターフェイス870c′は、Webサーバーを含んでもよい。
【0292】
インターフェイス862′は、調節される各種個別装置、例えば、ステッピングモーターのための、適切な調節インターフェイスを含む。図15に示す、各種調節可能ユニットは、図16の記載の中に列挙される。
【0293】
図16は、例として、生物試料処理用装置の調節部の、比較的詳細な図面を示す。図16の調節ユニットは、例えば、図1cに示す装置において使用してもよい。この場合、メインボード870は、装置の本体、すなわち、作業プラットフォーム2の下に収容される。Y−ボード874は、Y−レール314の上に配置される。キャリッジボード872は、キャリッジ320の上に配置される。グリッパーボード876は、グリッパーユニット400の上に配置され、ピペットボード877は、ピペットユニット500の上に配置される。遠心ボード878は、遠心ユニット200の中に配置される。前述のボード類は、図15のコンピュータボード870′に対応する。メインボード870は、メインコンピュータ870a、グラフィックコントローラー870b、およびインターフェイス870c、870d、870eを含む。さらに、メインボードは、装置の、調節される、各種ユニットのためのインターフェイス862、864を含む。その上に、メインボードは、キャリッジボードに登載されるカウンターインターフェイス871bを通じてキャリッジボード872と交信するためのインターフェイス871aを含む。
【0294】
メインコンピュータ870a、グラフィックインターフェイス870b、およびインターフェイス870c−eは、図15に示す要素870a′、870b′、および870c′に対応する。インターフェイス870c−eは、下記の機能を持つ。インターフェイス870cは、USBマスタープロトコールを調節するUSBホストインターフェイスである。したがって、インターフェイス870cは、新しいプロトコールが、例えば、USBメモリースティックを通じて、メインコンピュータ870aのメモリーへ負荷されることを可能とする。870dは、例えば、メンテナンスのために使用が可能なシリアルインターフェイス(RS232)を表示する。それとは別に、インターフェイス870cおよびdを組み合わせ、任意の所望のプロトコール、例えば、イーサーネットまたはTCP/IPを使用することも可能である。インターフェイス870e(RS232)は、遠心機のドライブボード878との交信のために働く。
【0295】
メインコンピュータ870aは、ステッピングモーターおよび光ビームのための各種インターフェイス862を、直接に、または、インターフェイス871aおよび871bを通じて調節する。光ビームは、一般に、ステッピングモーターのためのホームセンサーとして活動する、すなわち、例えば、ステッピングモーターによって駆動される部分に固定されるブロック部分が光ビームを遮る時、該駆動される部分が定められた較正位置に置かれた時に、センサーに信号または信号変化が生じる。それとは別に、さらに、光ビームは、動かされる部分に付着されてもよい。このようにして、メインコンピュータ870aは、特に、X−レール316、319におけるY−レールの運動;Y−レール326、329におけるキャリッジの運動;Z軸441、448にそうグリッパーの運動;グリッパー420、428の回転運動;グリッパーアーム431、438のグリッパー運動;ピペット部材541、548のZ運動;および、ピペットピストンドライブ512の運動のための、それぞれのステッピングモーターおよびホームセンサーを調節する。さらに、メインコンピュータ870aは、ヒーター/攪拌器のためのモーター636の運動を調節する。この運動にはホームセンサーは必要とされない。しかしながら、インターフェイスによって調節することが可能な、任意の光ビーム850は、他の目的のために使用されてもよい。他の光ビーム850、852は、他のインターフェイス、例えば、一貫性チェックおよび他の欠陥検出のためのインターフェイスを通じて活性化されてもよい。
【0296】
その上に、メインコンピュータは、遠心機を換気するためのモーター234、251、および、別のインターフェイス864を通じて、ヒーター/攪拌器600の加熱要素622および温度センサー624を調節する。異なるステッピングモーターのための各種インターフェイスが、異なるボード870、872、874に渡って分布される。
【0297】
その外、メインコンピュータ870aは、インターフェイス870eを通じて、遠心機200のドライブ電子部878を調節する。このドライブ電子部878は、例えば、遠心機のモーター218の調節、適切な開放機構260(図示せず)による遠心機蓋240の開放、およびドアロック269の開放のための、必須調節手段を含む。
【0298】
さらに、グリッパーボード872には、メインコンピュータ870aと交信する別のコンピュータ872aが与えられる。このコンピュータ872aは、光センサー810(さらに図7も参照)および超音波ユニット830を、対応するインターフェイス866、867を通じて調節するように働く。光センサーは、光学センサー810aおよび光源810bを含み、超音波ユニット830は、超音波センサー830aおよび超音波源830bを含む。その上に、コンピュータ872aは、他のステッピングモーター441、420、431、541、512、および、関連ホームセンサー448、428、438、548、518を、それぞれのインターフェイス862を通じて調節するためのドライバーを含む。
【0299】
装置およびその負荷の各種状態を検出するためのセンサーを装置に装備すると有利である。センサーは、例えば、下記の機能の内の一つ以上を実行するのに好適であってもよい。
−例えば、ピペットチップ用コンテナ720で、ピペットチップのために与えられた保持位置においてピペットチップ730を検出すること;
−遠心機で容器ホールダーのために与えられた位置において容器ホールダー120を検出すること、すなわち、遠心機のどの場所が容器ホールダーによって占拠されているのかを検出すること;
−例えば、遠心機200の容器ホールダー120で、またはヒーター/攪拌器600で、またはコンテナステーション710で、この目的にために与えられたホールド位置130、140、150、612においてカラム160、または容器170、またはコンテナ712、714、716を検出すること;
−例えば、何かの機械的耐性を補償するために、可動部分、例えば、キャリッジ300、またはグリッパー400、またはピペットユニット500の位置を調整すること;
−ステッピングモーターのゼロまたはホーム位置の検出;
−コンテナ712、714、716、または容器160、170における、液体または他の物質の充填レベルを測定すること;
−容器、例えば、カラム160またはピペットチップ730の性質および/または容量を検出すること;
−装置の状態、例えば、遠心機の蓋240、および装置のカウリングなどの蓋の状態、または、廃棄物コンテナの充填レベルをチェックすること。
【0300】
特に、上記機能のいくつか、またはその他の機能を実行するのに好適なセンサーを与えると有利である。
【0301】
ある好ましい実施態様では、上記機能の内の一つ以上が、キャリッジ300、グリッパー400、またはピペットユニット500に付着させることが可能な光センサー810によって実行される。例えば、図6の実施態様では、光センサー810は、ピペットユニットに付着される。その結果、光センサーは、作業面2の一部の上を動くことが可能となり、高さの調整が可能となる。
【0302】
光センサーは、赤または赤外範囲に光周波数を持ち、その放射法としてレーザーまたは光コーンを持つか、および/または、信号変調による外来光の抑制、および、三角法による背景光減衰を実行するための手段を備えるのが好ましい。したがって、光センサーは、光センサーの検出範囲において、特に、光センサーの光周波数の範囲における拡散反射に関する特定の反射性に基づいて、試料の存在を検出することが可能である。
【0303】
ピペットチップ、カラム、容器ホールダー、またはその他の消耗品などの品目の認識とは、問題の品目またはそのタイプのために意図される、装置の位置の有無に関する認識を意味する。
【0304】
光センサーの連続運動は、任意に、いくつかの品目の認識のために実行されてよい。次に、センサースポットが、例えば、様々の位置の上に線から線へ動かされる。この運動の際、適切な位置において測定が実行される。品目のための位置と、センサーとの間の機械的耐性が大きすぎる場合は、後述するように、先ずセンサー位置を調整することが可能である。運動時に測定値が採取される場合、測定時間は短くなければならず、好ましくは数ミリ秒の領域、恐らくは2から100msの間にある。それとは別に、センサーの運動は、検出方法のために停止されてもよい。
【0305】
センサーの運動は、その認識範囲が、ある特定の品目、例えば、ピペットチップ、またはピペットチップの一部のために与えられる点または位置をカバーするように選ばれる。できれば、センサーのスポットは、測定時、できるだけ正確に認識される特質に当たる命中が確実に起こるようにしなければならない。例えば、ピペットチップの場合、スポットは、ピペットチップの辺縁と接触する必要はないが、ピペットチップに対しできるだけ直角に入射しなければならない。
【0306】
認識範囲は、認識性を高める、品目の一部に向けられることが好ましい。認識性の向上とは、「品目存在」状態と「品目不在」状態の間の信号差の増大と定義される。したがって、認識性の向上を実現する部分とは、そこに品目が存在しない場合においてそれぞれの位置で検出される信号挙動とは異なる反射特徴、または、その他の何かの信号挙動を持つ。光センサーの光ビーム、または、他の何かの放射源の光ビームは、センサー方向において可視の、認識性向上部分の面積の1.5倍を超えない、好ましくは1倍または0.7倍のスポットサイズを持つことが好ましい。さらに、認識性向上部分は、センサーに対して定められた高さに配せられることが好ましい。
【0307】
ピペットチップの場合、認識性向上部分は、ピペットチップに登載されるフリースであってもよい。このフリースは通常白であるが、他のある色であってもよい。容器ホールダーの場合、認識性向上部分は、例えば、特定の反射性試料が与えられる、容器ホールダーの部分であってもよい。カラム(スピンチューブ)の場合、認識性向上部分は、膜、フィルター膜、またはフリースであってもよい。容器、例えば、エッペンドルフチューブの場合、認識性向上部分は、蓋、例えば、跳ね蓋、または、蓋のヒンジ要素または固定要素であってもよい。
【0308】
容器またはカラムの場合、それらは、任意の所望の色の液体によって、任意の所望の液体レベルまで充填してよいことを念頭においておくと有利である。さらに、カラムのフェルトも任意の所望の色を持ってもよい。それゆえ、検出方法のために背景を減衰させた光センサーを用いることが好ましい。センサー光を、第1距離を移動し、次に、第1距離よりも短い第2距離においてカラムまたは容器の上を移動させる。
【0309】
前述の方法、およびその他の方法は、図1cに示すもののような、装置の負荷状態をチェックするためには好適である。例えば、この装置において、完全性または一貫性についてチェックすることが可能である。したがって、例えば、遠心機200、または、ヒーター/攪拌器600におけるサンプルホールダーの負荷状態をチェックすることが可能である。
【0310】
装置の負荷状態をチェックするためには、異なる容器保持位置について、容器がその中に存在するかどうかを記録すると有利である。したがって、容器保持位置において存在と記録された容器の全数を、定量し保存することが可能である。したがって、例えば、遠心ローター212の容器ホールダー120の対応する保持位置における容器の全数を定量することが可能である。容器およびその位置の全数から、例えば、遠心機200における容器ホールダー120の数に関する結論を引き出すことが可能であるし、または、これは別に記録してもよい。容器保持位置において存在と記録された容器の全数に応じて、次に、容器保持位置における容器の分布に関する条件が決められる。条件は、例えば、前述したように、遠心機200の負荷状態における不均衡を最小とするように設定してもよい。次に、容器保持位置において存在と記録された容器の分布が、指定の条件と合致するかどうかに関してチェックが行われる。
【0311】
前述のように、光学センサーはさらに、容器保持位置に容器が存在するかどうかを記録するために用いられてもよい。したがって、その外に、光学センサーは、サンプル容器位置におけるサンプル容器の数も記録することが可能である。サンプル容器位置は、攪拌器/ヒーター600にあってもよい。したがって、サンプル容器の数が、存在と記録された容器の全数と適合可能であるかどうかをチェックすることが可能である。さらに、各サンプル容器に対し、容器保持位置を、例えば、遠心機200の容器保持位置を割り当てる割り当て操作を確立することも可能である。
【0312】
割り当て操作は、サンプル容器に、例えば、容器が存在すると記録された容器保持位置を割り当ててもよいし、または、その中の少なくとも一つの容器保持位置において容器が存在すると記録された、一群の容器保持位置を割り当ててもよい。さらに、割り当て操作は、サンプル容器を、容器保持位置に割り当てられる、サンプル容器位置に運ぶように指示を発することによって確立されてもよい。サンプル容器位置は、例えば、一般名によって容器保持位置に割り当てられてもよいし、または、サンプル容器ステーションにおけるサンプル容器位置の配置が、遠心機における容器保持位置の配置に対応するという事実によって、容器保持位置に割り当てられてもよい。さらに、割り当て操作は、それぞれの容器保持位置を、同じ容器のサンプル容器位置に割り当てる表を発することによって確立されてもよい。
【0313】
さらに、光学センサーは、消耗品による装置の負荷をチェックすることが可能となるようにしてもよい。このような消耗品は、容器、または生物物質であってもよい。特に、消耗品は、ピペットチップ、スピンチューブ、エッペンドルフチューブ、および生物流体、酵素、および/またはバッファー流体であってもよい。このために、処理のためのサンプルを持つ調製されたサンプル容器の数が記録される:調製されたサンプル容器の数に応じて、サンプルを処理するための消耗試料の必要数および/または量が、ある場合には、プロトコールに応じて決められ;装置に存在する消耗品の数および/または量が決められ;および、装置に存在する消耗試料の数および/または量が、必要な消耗品の数および/または量と比較される。消耗試料の現状を決めることによって、所望の状態を産生するため、ユーザーのための参照資料が生成され、モニター910に表示される。
【0314】
可動部分の位置を調整するために、さらに、一つ以上の光センサーが用いられてもよい。光センサーは、位置決めのため品目を検出するために使用されることが好ましい。一つの可能な実施態様では、一つ以上の光センサーが、可動ユニットに、例えば、キャリッジ300、またはグリッパー400、またはピペットユニット500に付着され、したがって、該ユニットと共に動くことが可能となる。ユニットの運動時、センサーは、その位置が定められ、既知であるマーキングの上を動かされる。このようにして、センサーの、それゆえ、可動ユニットの位置が決められる。
【0315】
マーキングは、光センサーの定められた位置において、光センサーにおいて信号、または信号差を誘発する要素である。例えば、マーキングは、作業表面2の辺縁によって形成され、形成は、辺縁の一側では、作業面2は光センサーの検出範囲の中にあり、他側では、検出範囲にはないように行われてもよい。それとは別に、マーキングは、異なる拡散反射特徴を持つ、二つの表面の間の境界によって形成されてもよい。いくつかの方向における位置決めを可能とするために、いくつかの方向(例えば、互いに垂直な二つの方向)に延びる、数個の辺縁または境界を用いてもよい。しかしながら、構築が非回転的に対称であるセンサー、例えば、光センサーの場合、差方向における位置決めは、通常、異なる正確度を持つ。この場合、異なる方向に方向づけられた、複数の光センサーを用いてもよいし、または、回転可能なセンサーを用いてもよい。
【0316】
位置マーキングに対する可動部分の位置は、ステッピングモーターのステップの数をカウントすることによって決めることが可能である。例えば、位置決めは、冗漫となるように設計されてもよい。位置決めは、機械的耐性を補償してもよい。
【0317】
さらに、位置決めのために他のセンサーおよびマーキングを使用してもよい。例えば、センサーは、磁気コイル、カメラ、または光ビームであってもよい。次に、マーキングは、例えば、誘導伝導要素、カラーマーキング、または、光ビームに対するブロック部材であってもよい。例えば、ステッピングモーターによって動かされる部分が、ある定められた較正位置(ホーム位置)にあるかどうかを検出するために、光ビームを用いることが可能である。この種のセンサー438を、図8および16を参照しながら記載する。
【0318】
それとは別に、センサーはさらに固定的に登載され、位置マーキングが、可動部分に与えられてもよい。例えば、図1cを参照すると、位置マーキングは、遠心ローター212に、または容器ホールダー120に与えられてもよい。次に、遠心ローター212の回転角度を、光学センサーを用いて決めることが可能である。
【0319】
さらに、遠心ローター212、または他の何かの可動部分を位置決めマーキングによって位置決めするために、可動センサーを用いることも可能である。例えば、ステッピングモーターによって動かすことが可能なセンサーユニット、例えば、ピペットユニット500の上に登載されるセンサーを使用してもよい。次に、この可動部分の位置決めが、下記の工程によって実行される。
−ステッピングモーターによって動かすことが可能なセンサーユニットの位置を較正すること、すなわち、センサーユニットのホーム位置を、例えば、光学センサーを介して固定マーキングを読み取ることによって確立すること。このマーキングは、例えば、作業プラットフォーム2の上に与えられてもよい。
−センサーユニットを、可動部分の運動域の定められた位置に動かすこと(例えば、遠心機200の場合)。定められた位置は、センサーユニットのステッピングモーターのステップ数を数えることによって達せられる。
−可動部分を動かし、例えば、遠心ローター212を回転させ、その回転を、可動部分のマーキング、恐らく、遠心ローターと共同回転することが可能なマーキングが、光学センサーとある定められた関係に納まったことを、光学センサーが検出するまで続けること。
−定められた関係から可動部分の位置を計算すること、である。
【0320】
それとは別に、可動部分の位置はさらに、センサーユニットを、可動部分の運動域の上に動かすことによって検出することが可能である。一方、センサーユニットの位置は、ステッピングモーターのステップ数をカウントすることによって更新される。可動部分のマーキングが、光学センサーに対しある定められた関係に納まったことを光学センサーが決めるとすぐに、可動部分の位置は、この定められた関係から計算することが可能である。
【0321】
生物試料、特に液体用容器の充填レベルをチェックするための、充填レベル監視デバイスは有利である。なぜなら、この種の充填レベル監視デバイスが無いと、装置に十分量のバッファーを与えるという責任がユーザーに課せられるからである。したがって、ユーザーによるチェックに関わる誤差の危険性および作業を軽減することが可能である。
【0322】
さらに、他の液体、または固体物質、例えば、粉末の充填レベルをチェックすることも可能である。特に、それぞれの充填レベルが、任意の間隔内にあることを確かめることが可能である。さらに、このような物質の存在は、後述の方法を用いてチェックすることが可能である。
【0323】
例えば、充填レベル監視デバイスを用いて、遠心機のフィルター容器(スピンチューブ)の充填レベルがあまりに高くなりすぎないように確保することが可能である。その結果として、フィルター容器が過剰に充填された場合、警告が発せられるようにすることが可能である。このようにして、遠心時、フィルター容器の目詰まりを阻止することが可能である。
【0324】
液体の充填レベルを測定するためには各種方法の使用が可能である。クロスコンタミネーションを避けるために、接触不要法が特に有利である。充填レベルの接触不要測定について、いくつかの方法が、後述の実施例を通じて記載される。
【0325】
通過時間の光学測定では、光インパルスが、光ファイバーを通じてコンテナに供給される。液体表面からの反射光がフォトダイオードによって検出される。インパルスとエコーの間のタイムラグが、充填レベルの深度の測定値である。
【0326】
超音波測定時、超音波インパルスが、ピエゾ要素、例えば、ピエゾセラミック要素から発射される。液体表面によって反射されたインパルスは、あるタイムラグの後同じピエゾ要素によって受容される。測定される通過時間は、センサーと液体表面の間の距離の測定値である。好ましくは約250kHzの透過周波数において約±1mmの解像度を持つセンサーを用いることが好ましい。さらに、参照表面を用いてシステムを較正することが好ましい。
【0327】
容量性測定時には、容量性センサーヘッドを液体表面に向かって動かし、最終的に、センサーのスイッチ点に達するまで行う。このスイッチ点は、センサーヘッドの容量電極が表面に近接した時に達せられる。
【0328】
光学的透過測定時には、レーザーの波長は、レーザー光が、充填レベルに応じて吸収されるように選ばれる。例えば、約1300nmの領域の波長が有利である。次に、吸収が、充填レベルの測定値を構成する。
【0329】
角度の光学的測定では、レーザービームは、液体の表面によって反射される。反射の角度、それゆえ液体の表面は、光学的ラインセンサーによって決められる。この方法では、物質の表面が、容器において、レーザー、または他の何かの放射線源によって照射され;液体(または、固体物質)の表面によって反射されるか、または、拡散的に反転された放射が、放射計によって測定され;放射計によって測定された放射に応じて、放射線源、放射計、および容器が互いにある空間的な関係に納められ(例えば、放射線源を傾けることによって)、そのため、物質表面に対する垂直線と、放射線源から物質表面へ通過する第1ビームとの間の第1角度が、物質表面に対する垂直線と、物質表面から放射計に通過する、第1ビームによって反射されるビームとの間の第2角度とほぼ同じになり;次に、物質表面の高さが、放射線源、放射計、および容器の空間関係の関数として決められる。
【0330】
物質表面のレベルは、一般に、第1および第2角度は同じであるという事実を用いて決められる。照射は、典型的には、直径3mmを持つペンシルビームを用いて実行される。さらに、角度測定では、他の目的、例えば、負荷の位置決め、および/またはチェックするために使用される光センサーを用いると有利である。
【0331】
光学的角度測定のために、光センサー、特に、光学的反射光センサーを用いる場合は、特に下記の誤差源を考慮に入れておかなければならない。先ず、光をあらゆる方向に反射させる可能性のある面の波状変動の可能性である。これは、全範囲に渡って偽の信号をもたらす可能性がある。それゆえ、十分長い期間において、または、表面波状変動のいくつかの波高に渡る区域において定量を実行することが有利である。このようにすると、表面波状変動は平均化されるので、滑らかな表面の反射角度とほぼ対応する反射角度において信号最大値が得られるようになる。さらに、容器の壁および底部からの反射をろ過することが好ましい。なぜなら、そうしないと、壁および底部からの反射が測定値を誤らせる可能性があるからである。これは、容器の形状が既知であれば可能である。
【0332】
さらに、接着力、好ましくは、そのレベルを調査中の、特定の液体に依存する接着力を考慮することも好ましい。接着力によって、容器の内部の壁にレンズ様平面が形成される。この表面を考慮しないと、これは、狭小な容器の場合、誤差をもたらす可能性がある。接着力を考慮するには、スポットサイズを、容器の内径を著明に下回るようにすると有利である。次に、反射角度を、水平位置の関数として測定することが可能である。依存度を、接着力を考慮したモデルと比較することによって、表面の曲線を決め、補償することが可能となる。それとは別に、スポットが十分に小さい場合、表面がほぼ水平となる、容器の中心にスポットを向けてもよい。このために、スポットの面積を、容器の内部断面の10分の1未満となるようにするのが好ましい。
【0333】
容器の性質および/または容量を検出するために、容器そのものに、または容器用コンテナのいずれかに付着させたマーキングを読み取ることも可能である。例えば、そのようなマーキングは、図12に示すマーキング突起721、722の形状を取ってもよい。このマーキングは、可動性光センサーを介して、または、光ビーム、または他の何かのセンサーによって読み取ることが可能である。
【0334】
さらに別の例として、容器のサイズは、容器のグリップ部分のサイズに依存してもよい。この場合、容器の把捉時の容器のサイズは、グリップアームの閉鎖運動の振幅を測定することによって決めることが可能である。
【0335】
さらに別の例として、容器のサイズは、その長さに依存してもよい。この場合、容器が、その長さにそって垂直に保持されるようにグリッパーによって把捉され、かつ、水平光路を有する一つ以上の光ビーム852(図1a参照)の上を、ある定められた高さにおいて動かされると有利である。容器の長さと、ある特定の光ビームの高さに応じて、該光ビームの光路は、該容器によって遮断されてもよいし、されなくともよい。長さは、狭めることも可能であるし、または、光ビームが遮断されたかどうか、または、どの光ビームが遮断されたかに関する情報から決めることも可能である。さらに、長さを決めるのに必要であれば、グリッパーを、光ビームの上を、または、異なる高さを持つ複数のビームの上を、数回動かすことも可能である。さらに、グリッパーは、光ビームの上に位置決めし、かつ、その光路が遮断されるまで、垂直方向に動かしてもよい。
【0336】
ユーザーインターフェイス、操作概念
装置の操作概念は、単純で、直感的な操作を指向する。装置のユーザーガイドは、特にこの概念に寄与する。ユーザーガイドは、手順を実行するために必要な入力工程ができるだけ少なくなるように、工程ができるだけ直感的となるように、かつ、ユーザーの必要とする関連情報は、できるだけ理解しやすい形で表示されるように設計される。例えば、このことに対する寄与は、頻繁に使用される手順の設定は保存し、かつ、直接呼び出すことが可能であるが、めったに改変を必要としないインプットフィールドは通常迂回されるという事実によって実行される。
【0337】
装置は、事実上、TFTタッチスクリーンを用いて操作される。例えば、240x320ピクセルの解像度を有するタッチスクリーンを用いてもよい。キーおよびスイッチなどの、他の操作要素も、例えば、緊急時のオフ機能のため、または、個々のモジュールのスタンドアローン操作のため任意に可能としてよい。装置はさらに、プロトコールおよびパラメータの負荷または保存のために、例えば、診断データの転送、ソフトウェア更新版の起動、または装置のリモート操作を可能とするため、ディジタルデータ用インターフェイスを含む。図16は、このため、および類似の目的のためにUSBインターフェイス870c、およびRS232インターフェイス870dを示す。
【0338】
ディスプレイ910に示される、ユーザーガイドのための典型的なスクリーン設計が図17bに示される。図示のスクリーン930は、表題932、数値フィールド、および他の各種キー(「標準」937;「セーブ」;「キャンセル」)を持つ。
【0339】
表題932は、ユーザーガイドにおける現在の状況、例えば、メニューにおける方向づけのために役立つ。表題932では、過度に長い文章は短縮される。これは、一連のドットによって示される。文章の左側または右側がより重要かに応じて、右または左が切り捨てられる。
【0340】
数値フィールドは、数値、この場合はバッファー容量を補正するために使用される。これは、オン/オフ調節要素938を含む。この調節要素938の”+”キーを押すと、数値は増加し、”−“キーを押すと、数値は減少する。可能は閾値数値934、835が示される。閾値が達せられると、調節要素938の対応キーが不活性になる。
【0341】
さらに、図示の数値フィールドと同様に、一定数の要素の中から要素を選択するための、例えば、いくつかのプロコールの中からプロトコールを選ぶためのリストフィールド(図示せず)を持ってもよい。調節要素938同様、リストフィールドは、所望の要素を選択するための矢印キーを持つ。任意の時間の現在要素は、枠組みの中にボールド体で、比較的大きなフォントで示される。リストフィールドはさらに、選択された要素について何が起こることが予想されるかを記載するアクションキーを含む。選択されたリスト要素の表示が直接押された場合には、もっとも起こりやすいアクションが実行される。
【0342】
装置が最初に使用される時、図17aに示すような、開始スクリーン920が示される。開始スクリーン920は、前述の図17bのスクリーンと完全には対応しない。開始スクリーンは、二つのクイックスタート・キー924、プロトコールキー922、および、装置設定および他の機能にアクセスするためのツールキー926を含む。開始スクリーンのキーが操作されると直ちに、ユーザーは対応メニューに指向される。
【0343】
クイックスタート・キー924は、最後に開始実行したプロトコール(左側キー)、および、最後の一つ前に実行したプロトコール(右側キー)を示す。二つを超えるクイックスタート・キーを与えてもよい。クイックスタート・キー924のキャプションは、一旦プロトコールが始まると変わる。あるプロトコールをクイックスタート・キーに割り当てなければならない場合、対応するクイックスタート・キー924を長期に操作することが可能である。
【0344】
プロトコールの個々の表示パラメータは変えることが可能である。適応した数組のパラメータを有するプロトコールを保存し、次いで、リストフィールドを用いて選択することが可能である。次に、パラメータ組を、オプションキーを用いて適応させることが可能である。
【0345】
例えば、図18aおよび18bは、プロトコールを起動するための典型的操作手順を示す。第1スクリーン920は、図17aに示す開始スクリーンである。クイックスタート・キーが押されると911、消耗品、およびプロトコールのためのその他の調製品を、装置に負荷するための指示946を持つ一つ以上のスクリーン940が現れる。
【0346】
表示のスクリーン940は、指定のプロトコールに、バッファー液用コンテナ710の各種位置942に必要な液体および液体レベル944を示す。図18aは、スクリーン940に概観を示す。ここでは、液体はカラーコードされ、必要な液体レベルはグラフ的に表示される。負荷状態に関する詳細な情報は、「次へ」キー(図示せず)を押すことによって獲得される。「スキップ」キーを押すと、ユーザーガイドのこの部分は飛ばされる。
【0347】
遠心蓋が開放されると直ちに、ユーザーインターフェイスも遠心機を負荷するための指示を表示する(図示せず)。
【0348】
図示の例では、「スキップ」キーが押される911.図18aに示す、それに続く第3スクリーン950は、実行されるプロトコール工程の概観を示す。工程は、進行バー951の要素として示される。表示のスクリーンには、下記のプロトコール工程が示される。初期化、分解、インキュベーション、分解、結合。スペースの理由で表示することができない他の工程は、別時期に示されるか、または、例えば、ドットなどの要素によって表示される(図示せず)。一方、その外の工程は、その要素に触れることによって表示させることが可能である。
【0349】
「編集」キーを用い、プロトコールの変動パラメータ、例えば、バッファーのタイプまたは量、二重幻視、開始カラム、RNアーゼ処理などを適応させることが可能である。開始キー911を押すことによって、プロトコールが開始される。
【0350】
プロコールが起動中に表示されるスクリーン950が図18bに示される。このスクリーンは、進行ディスプレイにおいて、残りの推定時間954、および、現実に活動しているプロトコール工程952を示す。プロトコールはいつでも停止させることが可能であるが、再び続けることはできない。中断キーは、緊急時オフボタンではない。各種方法は、最終プログラムが終了し、スピンドルがその開始位置に戻るまでは、終了されない。
【0351】
その外に、遠心機および振とう器は、プロトコールとは独立に、独自に操作することが可能である。これらの機能に対しては、例えば、図17aの開始スクリーンのツールメニュー926を用いて、または特別キーを用いてアクセスすることが可能である。
【0352】
開始スクリーン(図17aを参照)のツールボタン926を押した後、各種の装置設定を選択することが可能である。次に、下記の設定オプションを含むメニューが現れる。
−プロトコールとは独立に遠心機200を用いること;
−プロトコールとは独立に加熱および/または振とうすること;
−維持、例えば、可動部分の再設定;遠心蓋の開閉;
−設定、例えば、スクリーンの輝度、音信号;
−システム調節、例えば、ログファイル、装置特徴(シリアル番号、仕様など)、プレイの最新更新の保存;および、
−システム設定、例えば、温度、電圧、エラーメッセージなど。
【0353】
メニュー品目の順番は、使用頻度に依存してよい。ある機能の要求される頻度が高ければ高いほど、その機能はメニューにおいてより上に現れる。さらに、基本的に、「標準」キーの利用も可能である。このキーは、選択された要素について標準値を設定する。
【0354】
装置は、USBマスターとして構成されるUSBインターフェイス870cを持つ。これによって、データは、USBメモリースティックから読み取り、かつ、該スティックに書き込むことが可能である。したがって、USBメモリースティックは、PCと装置の間の媒体として活動することが可能である。それとは別に、さらに、イーサーネットまたはRS232などの別のインターフェイスも使用してよいし、かつ、Webサーバーなどの他の機能も実行してよい。
【0355】
下記のデータを、USBインターフェイスを用い、USBメモリースティックと交換してもよい。
−プロトコール(個々のプロトコール、またはいくつかのプロトコールを同時に負荷および保存すること);
−装置情報(例えば、診断情報、サービスデータまたはエラーデータを持つログファイル、状態ファイルなど)のセキュリティの確保;および、
−ファームウェアまたはソフトウェアの更新、である。
【0356】
それに加えて、プロトコールおよびその他のファイルを消去することが可能である(個々のプロトコール、またはいくつかのプロトコールを同時に)。プロトコールは、SPSアルゴリスムとして保護され、xmlファイルとして保存される。
【0357】
各タイプのファイル(例えば、負荷または保存されるプロトコール、ファームウェアなど)は、USBメモリースティックのインデックス構造と関連づけられる。該構造においてインデックスは指定の名前を示す。USBメモリースティックからの、または該スティックへのファイルの移送は、独自のメニューを与える、特別支援プログラムを用いて実行される。ユーザーは、標的装置において既に存在するファイルに上書きするか、または、まだ存在しないファイルだけを移送するかの選択を有する。
【0358】
装置が、特別サービスソフトウェアを備えたRS232インターフェイス870dを通じてPCに接続された場合、他のサービス機能を実行してもよい。
【0359】
操作は、もっとも一般的な応用のための、可能なもっとも容易な使用について設計される。その応用は、新規プロトコールの運用およびプロトコールの消去である。
【0360】
プロトコール
次に、前述の部分的モジュールを有する装置において生物試料を処理する際に実行してもよい部分的工程を、例示のプロトコールを参照しながら記載する。先ず、図18aに示すように、所望のプロトコールを探し、任意に、プロトコールパラメータを選択する。次に、装置は、該装置に負荷するための指示940を付与する。装置は、この指示にしたがって手動で負荷される。それとは別に、装置は、自動的、または部分自動的に負荷されてもよい。特に、
−消耗品ステーション701(図12参照)は、ピペッチチップ730、および、バッファー液712、714、716を含むコンテナなどの消耗品によって負荷される;
−遠心機200は、適切な容器ホールダー120および容器160、170によって負荷される;
−ヒーター/攪拌器600は、サンプル容器170によって負荷される。処理されるサンプルは、サンプル容器170に含まれる。
【0361】
それとは別に、負荷は、例えば、準備済みのステーション701、または、容器キャリヤ610を装置に挿入することによって実行されてもよい。
【0362】
次に、負荷は、一貫性と完全性に関して装置によってチェックされる。前述のように、チェックは、例えば、作業プラットフォームの上を移動可能な光センサー810を介して、および/または、超音波ユニット830を介して実行してもよい。さらに、他の方法パラメータ(例えば、処理されるサンプルの数から、検出されるサンプル容器170の数まで)もチェックから導き出すことが可能である。
【0363】
次に、プロトコール工程は、サンプルを処理するために実行される。例示として挙げると、細胞から得られた生体分子を精製するためのプロトコールの自動化実行、分解、ペレット化、結合、洗浄、および溶出の諸工程を含む実行が記載される。さらに、処理は、例えば、公刊物、「QIAGENベンチガイド」、「鋳型精製およびDNA配列決定のためのQIAGENガイド」、および「QIAGEN QIAprep(登録商標)Miniprepハンドブック」(第2版、2005年6月)に記載される、他のプロトコールを含んでもよい。その外、実行されるプロトコール工程は、前記工程の内のいくつかだけを含んでもよいし、または、それらに加えて、またはそれらの代わりに、他の工程を含んでもよい。
【0364】
分解工程のために、サンプル試料は、サンプル容器を備えたヒーター/攪拌器に、手動で、または、任意にグリッパー400を介して移送され、または、ピペットユニット500がサンプル試料に移送される。バッファー液が、サンプル試料にピペット注入される。例えば、ピペット注入プロセスの間、ピペットチップが汚染されないほどの十分な高さに確実にある限り、同じピペットチップを全てのサンプルのために使用してよい。
【0365】
ヒーター/攪拌器を振とうすることによって、バッファー液とサンプル試料を混ぜ合わせる。サンプルは、任意に、ヒーター/攪拌器で加熱することによって定められた温度に導かれ、かつ、任意の時間その温度に維持される(インキュベーション)。任意に、他のバッファー液が加えられる。ここで、所望の生体分子は、バッファー液に溶解する(分解産物)。
【0366】
次に、この分解産物が、図7を参照しながら前述したように、ピペット注入によって遠心機に移送される。各サンプルに対し個別のピペットチップが使用され、次に、廃棄物処分ステーション740において廃棄される。
【0367】
次に、任意に、ペレット形成工程が実行される。この工程では、サンプルは遠心され、分解産物と細胞デブリのより良い分離が実現される。サンプルは、ピペット注入によって、遠心機の容器に移送される。この容器は、保持位置140に保持されるエッペンドルフチューブ170であってもよいし、または、容器ホールダー120と一体化される容器150であってもよい(例えば、図11cを参照)。それとは別に、その中にサンプルを有するサンプル容器170は、グリッパー400によって、遠心機の保持位置140に移送されてもよい。次に、サンプルは、細胞デブリが、主に、容器の床に集まるように、遠心機200において遠心される。遠心の際、遠心機の蓋240は、蓋調節部260によって閉鎖される。次に、蓋は、遠心機の内部へのアクセスを可能とするために再び開放される。
【0368】
次に、結合工程が来る。この工程では、分解産物は、ピペット注入によって、フィルター容器160、または、担体試料、例えば、膜を含む容器160に移送される。細胞デブリの含量が増加した容器の基部に溜まった分解産物部分は移送されない。
【0369】
担体試料を含む容器160は、容器ホールダー120の保持位置130(または150)に置かれる。遠心によって、分解産物は、担体試料を貫いて、またはそって強制的に移動させられるが、生体分子は、好ましくは担体試料の上に残留する。残余の分解産物は、容器ホールダー120の廃棄物容量122の中に濯ぎこまれる(図11c参照)。
【0370】
次に、洗浄工程が実行される。ピペットユニット500を用いて、容器160に1種以上の洗浄液を添加した後、容器160を遠心して、担体試料を貫いて、またはそって洗浄液を強制的に移動させる。これによって、不要な成分が担体試料から除去される。溶解成分を含む洗浄液は、容器ホールダー120の廃棄物容量122の中に濯ぎこまれる。洗浄工程は任意に繰り返されてもよい。
【0371】
溶出工程を準備するために、容器160が移送される。一般に、かつ、他のプロトコール工程とは独立に、容器160は、溶出工程前に、グリッパーを用い、生物試料、特に、液体を受容するための別の容器170に移送される。好ましくは、容器は、グリッパー400を用いて輸送される。グリッパーは、図6、8、および/または9と関連して記載された特質の内のいくつか持つことが好ましい。別容器170が遠心機200に配置されることが特に好ましく、もっとも好ましくは、別容器170は、遠心機の容器ホールダー120の保持位置140の中に脱離可能に配置される。さらに、容器160は、溶液脱出のための流出口を持ち、かつ、容器160は、移送後、別容器170に対し、遠心時、容器160の流出口から流出した液体が全て、別容器170に収集されるように配置されることが好ましい。
【0372】
以後、非限定的拘束力において、移送される容器160は第1保持位置130に配置され、別容器170は、遠心機の容器ホールダー120の第2保持位置140に配置される(図11c参照)ものと仮定する。次に、プロトコールの他の工程とは独立に、グリッパーユニットによって、例えば、下記の通りに別容器に対し移送が実行される。グリッパーユニット400は、容器ホールダー120に対して相対的に位置決めされ、図8および9の記載において具体的に説明されるように、位置決め要素452は、容器ホールダーの位置決めカウンター要素124と相互作用を持つ。要すれば、グリッパー410は、ドライブ431によって軸436aの周囲に回旋され、それによって、グリッパーは容器160を把捉することが可能になる。グリッパーは、容器を把捉し、それを、保持位置130から除去する。グリッパーは、ドライブ431によって軸436aの周囲に回旋される。最後に、グリッパーは、容器160を、別容器170の中に設置し、該容器を解放する。この運動行程を通じて、位置決め要素452は、容器ホールダーの位置決めカウンター要素124と相互作用を持つことが好ましい。これは、例えば、バネ458によって確保することが可能である。
【0373】
それとは別に、容器160はさらに、第1容器ホールダー120の第1保持位置130から別容器170に移送することが可能である。この別容器は、第1容器ホールダー120とは異なる、遠心機の別の容器ホールダーに配置される。次に、この排除および挿入の間に、別の容器ホールダーに対してグリッパーユニットを位置決めすることから成るさらに別の工程が実行されなければならない。
【0374】
グリッパー410および、前述の運動に関するさらに詳細な説明が、図8および9に関連して上に示される。
【0375】
溶出工程のために、溶出液が、容器160に加えられ(ピペット注入)、容器160が遠心される。溶出液は、担体試料から所望の成分を溶解し、それを別容器の中に洗い流す。ここで、所望の成分は待機状態に維持され、溶出液に溶解される。
【0376】
最後に、最終の「整理」工程では、手順の中間工程のために使用された容器は、例えば、廃棄物処分ステーション740に運ばれることによって、手動または自動的に処分される。
【図面の簡単な説明】
【0377】
【図1a】図1aは、一実施態様における、ピペット廃棄ステーションを持つが、グリッパーユニットを持たない作業プレートの頂上図、ピペット廃棄ステーションの拡大図、および、グリッパーユニットを持ち、かつ開放した遠心機の蓋を持つ作業プレートの平面図を示す。
【図1b】図1bは、一実施態様における、ピペット廃棄ステーションを持つが、グリッパーユニットを持たない作業プレートの頂上図、ピペット廃棄ステーションの拡大図、および、グリッパーユニットを持ち、かつ開放した遠心機の蓋を持つ作業プレートの平面図を示す。
【図1c】図1cは、一実施態様における、ピペット廃棄ステーションを持つが、グリッパーユニットを持たない作業プレートの頂上図、ピペット廃棄ステーションの拡大図、および、グリッパーユニットを持ち、かつ開放した遠心機の蓋を持つ作業プレートの平面図を示す。
【図2a】図2aは、図1cおよびaの作業プレートを持つ実施態様の斜視図を示す。
【図2b】図2bは、図1cおよびaの作業プレートを持つ実施態様の斜視図を示す。
【図3a】図3aは、蓋を閉鎖した状態;蓋を開放した状態;蓋の蓋平板を排除した状態における、ある実施態様の遠心ユニットの斜視図を示す。
【図3b】図3bは、蓋を閉鎖した状態;蓋を開放した状態;蓋の蓋平板を排除した状態における、ある実施態様の遠心ユニットの斜視図を示す。
【図3c】図3cは、蓋を閉鎖した状態;蓋を開放した状態;蓋の蓋平板を排除した状態における、ある実施態様の遠心ユニットの斜視図を示す。
【図4】図4は、図3aの遠心ユニットを切断する、側方断面を示す。
【図5】図5a−cは、遠心機の遠心ローターの中に懸垂される容器ホールダー、および、容器ホールダーの最大回旋角度のためのストップを示す。
【図6】図6は、グリッパーおよびピペットユニットを備えた実施態様のグリッパースライドの斜視図を示す。
【図7】図7は、図6のピペットユニットの斜視図を示す。
【図8】図8は、図6のグリッパーユニットの斜視図を示す。
【図9】図9は、図8の、グリッパーユニットのグリッパーの斜視図を示す。
【図10】図10は、一実施態様の容器ホールダーの斜視図を示す。
【図11a−b】図11a−bは、一実施態様の容器ホールダーの側面図を示す。
【図11c−d】図11c−dは、一実施態様の容器ホールダーの側面図を示す。
【図12】図12は、一実施態様における、消費済み試料のための消費品物ステーションの斜視図を示す。
【図13】図13は、一実施態様における、加熱および攪拌のためのユニットの斜視図を示す。
【図14】図14a、bは、一実施態様における、加熱および攪拌のためのユニットの、それぞれ、側面図および平面図を示す。
【図15】図15は、一実施態様のセンサー機能および調節機能の、簡単模式図を示す。
【図16】図16は、一実施態様のセンサー機能および調節機能の、詳細模式図を示す。
【図17a】図17aは、一実施態様の、ユーザーガイド用画像スクリーンを示す。
【図17b】図17bは、一実施態様の、ユーザーガイド用画像スクリーンを示す。
【図18a】図18aは、ユーザーに対し、手順の選択、準備、および起動をガイドするための、ある実施態様の画像スクリーンを示す。
【図18b】図18bは、ユーザーに対し、手順の選択、準備、および起動をガイドするための、ある実施態様の画像スクリーンを示す。
【技術分野】
【0001】
本出願は、試料、好ましくは生物試料を処理するための装置に関する。本出願はさらに、遠心機、特に、生物試料を遠心するための遠心機または装置、および、遠心機において生物試料を遠心するための方法、または、遠心ユニットにおいて生物試料を処理するための方法に関する。本出願はさらに、生体分子、特に、サンプル流体の生体分子を自動的に処理するための装置に関する。
【0002】
本出願はさらに、容器、特に、生物試料を受容するための容器を取り扱うためのグリッパーユニット、そのような容器を把捉および/または解除するためのグリッパー、および、そのような容器のための容器ホールダーに関する。本出願はさらに、容器、特に、生物試料を受容するための容器を、好ましくはグリッパーを用いて把捉するための方法、および、そのような容器を、好ましくはグリッパーを用いて解除するための方法に関する。
【0003】
本出願はさらに、容器を輸送するための方法、好ましくは、容器ホールダーの中に、または、容器ホールダーから外へ容器を輸送するための方法に関する。特に、本出願は、特にグリッパーユニットを用いて、容器を容器ホールダーから、好ましくは遠心ローターの容器ホールダーから取り出すための方法、容器を容器ホールダーに設置するための類似方法に関する。本出願はさらに、容器を移送するための方法、特に、グリッパーユニットを用いて、第1容器ホールダーから第2容器ホールダーへ容器を移送するための方法、あるいは、グリッパーを用いて、遠心ローターの容器ホールダーの第1保持位置から、遠心ローターの容器ホールダーの第2保持位置へ容器を移送するための方法に関する。
【0004】
本出願はさらに、遠心機の遠心ローターの位置決めをするための方法、特に、遠心ローターの回転軸周囲における回転角度について遠心ローターの位置決めをするための方法に関する。本出願はさらに、容器ホールダー、特に、生物試料受容用容器の容器ホールダーの変位角度の位置決めをするための方法に関する。
【0005】
本出願はさらに、遠心機を冷却するための方法に関する。
【0006】
本出願はさらに、容器用ホールダーにおける、容器、特に、生物試料を受容するための容器の有無を検出するための方法に関する。本出願はさらに、容器における物質の表面の高さを定量するための方法、および、容器、特に、生物試料を受容するための容器の性質を検出するための方法、もっとも特異的には、容器用コンテナステーションにおける容器の性質を検出するための方法に関する。本出願はさらに、遠心機の占拠をチェックするための方法、および、サンプル処理装置の占拠をチェックするための方法に関する。
【背景技術】
【0007】
化学、生物学、医学、または環境科学などの数多くの技術分野において、例えば、生物試料(例えば、流体)を分析し、処理し、または反応させることが必要となる。このために、流体または試料が、様々な方法によって、ろ過され、冷却され、加熱され、その構成成分に分解され、洗浄され、またはピペット転送され、あるいは、他のやり方で処理される。生物試料を調製するためには、しばしば、長い、複雑な、一連の処理工程を経ることが必要である。さらに、多くの場合、異なる試料から成る大規模な収集物を、同じ順序に従って処理しなければならないか、あるいは、同じ試料から成る一連のものを平行的に処理しなければならないことがある。これは、時間がかかり、処理能力を制限し、かつ、操業停止を招きやすい。
【0008】
生物試料の処理は、例えば、核酸またはタンパクなどの生体分子の抽出および/または精製の分野で使用される。例えば、生体分子を精製するための、ある周知の方法は、生物サンプルの内容物に対するアクセスを実現する(「分解」)こと、固相支持体または担体試料に対し生物サンプルの内容物の構成成分を選択的に結合させること、固相支持体または担体試料から不溶の成分を排除すること(「洗浄」)、および、所望の構成成分を溶解すること(「溶出」)から成る諸工程に基づく。
【0009】
生体分子の精製時、所望の吸収および脱離を可能とするために、例えば、シリカゲルから形成されるフィルター要素であって、一方では、液体が、そのフィルター要素を通過することを可能とするために多孔性または基質様でありながら、他方では、分子が、特異的、または非特異的方法において結合する表面を持つ、特別なフィルター要素が開発されている。別の精製方法では、生体分子は、単に、サイズ排除の作用によってフィルター要素に保持される。例えば、核酸などの生体分子を含む液体がこのフィルター要素を通過すると、生体分子またはその一部は、いずれにしろフィルター要素に保持されるが、一方、残余は、フィルター要素を通過する。
【0010】
さらに、フィルター要素から生体分子を獲得するには、該生体分子を脱離するために、ヌクレアーゼ無添加水などの溶出液を、フィルター要素の上に通過させる。このようにして、所望の生体分子は、フィルター要素から放出され(溶出され)、容器の中に捕捉される。このようなフィルター要素は、入力開口と出力開口を有する個々の容器に配置されるか、あるいは、マルチウェル・プレートに配置される膜としばしば表示される。これらのフィルター要素は、遠心(スピン方式)によって、または、真空技術に基づく装置を用いて処理される。膜を有し、かつ、遠心機においても使用することが可能な入力開口および出力開口を有する個々の容器は、カラム、遠心カラム、フィルター容器、クロマトグラフィーカラム、カラム、スピンカラム、または単一スピンカラムの形状としても知られる。
【0011】
一般に、真空法に優る遠心方法の利点は、純度がより高いこと、濃度がより高いこと、および、クロスコンタミネーションの危険度がより低いことである。一般に、品質および濃度の点から見て、生体分子精製の最良結果は、高い重力野(>10,000xg)の下で処理される遠心カラム(単一スピンチューブ)によって獲得される。なぜなら、これによって、クロスコンタミネーションが最小とされ、膜からの所望物質の回収が最大とされるからである。しかしながら、一つの欠点は、遠心カラムの手間のかかる手動処置であり、これが、エラーの危険度および処理時間を、特に様々のサンプルを同時に処置または処理しなければらならない場合、増す。マルチウェルプレート方式を用いることによって、より高度の標準化および自動化のみならず、より高速の全体処理も実現される。しかしながら、これは、品質および/または量に関する妥協を含む。
【0012】
QIAGENは、「結合−洗浄−溶出」手順の基本原理に基づいて、ある範囲の生物サンプルから得られた様々な生体分子に対し、広範な精製手順および必要製品を提供する。このために、様々なフィルター試料および装備が、例えば、特許文献1または特許文献2に記載の通りに使用される。市販の製品”QIAGEN QIAprep Spin Miniprep Kit”は、例えば、典型的な精製配列を開示し、いくつかの試薬およびバッファーと共に遠心機において使用される2mlの収集容器を供給する。
【0013】
生物試料の処理という主題に関してはいくつかの公刊物がある。例えば、特許文献3は、自動化遠心装置を含む、サンプル処理用自動化システムを開示する。特許文献4は、複数の収集容器が、直接アクセス用担体ウィールに位置決めされる、血液用収集システムを記載する。特許文献5は、例えば、核酸などの生物試料を含む液を、一般遠心機において自動的に遠心するための自動化遠心システムを記載する。特許文献6は、流体サンプルを処理するための装置を記載する。特許文献7は、遠心カラムが、自動化ルーティングシステムによって活性化される、遠心負荷用自動化装置を記載する。特許文献8は、反応容器について使用される化学的マニピュレータを記載する。特許文献9は、回転コンテナを囲む保護的ジャケットを有する遠心機を記載する。
【特許文献1】WO03/040364
【特許文献2】US6,277,648
【特許文献3】US6,060,022
【特許文献4】US5,166,889
【特許文献5】US2004/0002415
【特許文献6】WO2005/019836
【特許文献7】WO00/38046
【特許文献8】EP122772
【特許文献9】GB2235639
【発明の開示】
【発明が解決しようとする課題】
【0014】
既存の自動化システムの一つの欠点は、それらのシステムのサポートする方法が、高品質標準の遠心カラムを与えないこと、および、同時にほとんどまたは全く手動の介入が無い場合には機能することができないことである。
【課題を解決するための手段】
【0015】
本発明は、前述の課題の内のいくつかを解決するために出発する。この目的は、請求項1によるグリッパーユニットによって、請求項5および10による容器を輸送および移送ための方法によって、請求項16および56による容器ホールダーによって、請求項19、20、21、22、40、51、60、69、および76による、生物試料の処理装置によって、請求項31から33による容器の設置、排除、および移送のための方法によって、請求項47および55による位置決めのための方法によって、請求項67による容器の有無を検出するための方法によって、請求項87による容器の性質を検出するための方法によって、および、請求項89による遠心機の占拠をチェックするための方法によって達成される。
【0016】
本発明の、さらに別の利点、特質、局面、および詳細、および、本発明の好ましい実施態様および特定局面は、付属の特許請求の範囲、説明、および図面から明らかになるであろう。
【0017】
本発明の一局面では、生物試料を受容するための容器を操作するためのグリッパーユニットが提案される。この容器は、開放位置および閉鎖位置を占拠することが可能な蓋を有する。グリッパーユニットは、容器を把捉し、かつ解除するためのグリッパー、および、容器に対し定められた位置に蓋を保持するための蓋ホールダーを有する。定められた位置は、蓋の開放位置である。
【0018】
さらに、生物試料を処理するための装置が提案される。この装置は、グリッパーユニットおよび遠心機を含む。グリッパーユニットのグリッパーは、遠心機に容器を設置するか、または遠心機から容器を排除するのに好適である。
【0019】
さらに、容器を容器ホールダーの中へ、または容器ホールダーから容器を輸送するための方法が提案される。容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを介して容器を把捉するか、または保持すること;容器に対し蓋を定められた位置に保持すること;および、容器に対する蓋の定められた位置を保有しながら、グリッパーユニットを介して、容器を容器ホールダーの中へ、または容器ホールダーから容器を輸送することから成る諸工程を含む。
【0020】
さらに、グリッパーユニットを用いて容器ホールダーから容器を排除するための方法が提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを介して容器を把捉すること;容器に対し蓋を定められた位置に保持すること;および、容器に対する蓋の定められた位置を保有しながら、グリッパーユニットを用いて、容器ホールダーから把捉された容器を排除することから成る諸工程を含む。
【0021】
さらに、グリッパーユニットを用いて容器ホールダーの中に容器を設定するための方法が提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを介して容器を保持すること;容器に対し蓋を定められた位置に保持すること;および、容器に対する蓋の定められた位置を保有しながら、グリッパーを用いて、容器ホールダーの中に保持された容器を設置、または挿入することから成る諸工程を含む。方法は、任意に、グリッパーによって容器を解除することから成る追加工程を含む。
【0022】
さらに、グリッパーユニットを用いて、第1容器ホールダーの第1保持位置から、第2容器ホールダーの第2保持位置へ容器を移送するための方法が提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この方法は、グリッパーユニットを用いて、第1保持位置にある容器を把捉すること;容器に対し蓋を定められた位置に保持すること;グリッパーを介して、第1容器ホールダー、または第1保持位置から、把捉された容器を排除すること;グリッパーを用いて、第2容器ホールダーまたは第2保持位置の中に把捉された容器を挿入することから成る諸工程を含む。排除および挿入工程では、容器に対する蓋の定められた位置が維持される。方法は、任意に、グリッパーによって容器を解除することから成る追加工程を含む。
【0023】
さらに、生物試料受容用容器のための容器ホールダーが提案される。その際、容器は、容器の開口部を閉鎖するために、それに付着される蓋を含む。この容器ホールダーは、遠心機において使用するのに好適であり、容器を保持するための、少なくとも一つの保持部材、および、該容器に付着する蓋を保持するための、少なくとも一つの蓋受容体を含む。受容体は、容器用グリッパーユニットの蓋ホールダーによる蓋へのアクセスを可能とする形状を持つ。
【0024】
さらに、遠心機において使用されることを意図される容器ホールダー、および遠心機を含む、生物試料を処理するための装置が提案される。
【0025】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、生物試料用容器を保持するための、少なくとも一つの容器ホールダーを有する、回転可能な遠心ローター、および、容器ホールダーに容器を挿入するためのグリッパーである。
【0026】
さらに、下記の部分を有する、生物試料を処理するための装置が提案される。部分は、生物試料用容器を保持するための、少なくとも一つの容器ホールダーを有する、回転可能な遠心ローター、および、容器ホールダーから容器を排除するためのグリッパーである。
【0027】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、生物試料用容器を保持するための、少なくとも一つの容器ホールダーを有する、回転可能な遠心ローター、および、容器ホールダーの第1保持位置から第2保持位置へ、容器を移送するためのグリッパーである。
【0028】
さらに、グリッパーを介して、遠心ローターの容器ホールダーに容器を設置するための方法が提案される。その際、容器ホールダーは、容器用の保持位置を有する。方法は下記の諸工程を含む。すなわち、グリッパーは、保持位置に対しある相対的位置に置かれること;グリッパーは、保持位置に容器を設置するために移動させられること;容器はグリッパーによって解除されること、である。
【0029】
さらに、グリッパーを用いて、遠心ローターの容器ホールダーから容器を排除するための方法が提案される。その際、容器ホールダーは、容器のための保持位置を有する。方法は下記の諸工程を含む。すなわち、グリッパーは、保持位置に対しある相対的位置に置かれること;容器は、グリッパーによって把捉されること;グリッパーは、保持位置から容器を排除するために移動させられること、である。
【0030】
さらに、グリッパーを介して、遠心ローターの、容器の、第1保持位置から、遠心ローターの、容器の、第2保持位置へ容器を移送するための方法が提案される。方法は下記の諸工程を含む。すなわち、グリッパーは、第1保持位置に対しある相対的位置に置かれること;容器は、グリッパーによって把捉されること;グリッパーは、第1保持位置から容器を排除するために移動させられること;グリッパーは、第2保持位置に対しある相対的位置に置かれること;グリッパーは、第2保持位置に容器を設置するために移動させられること;容器はグリッパーによって解除されること、である。
【0031】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、回転軸の周囲に回転が可能な遠心ローター、遠心ローターのための駆動部、および、ローターと同時回転することが可能なカウンター位置決め要素との相互作用によって、遠心ローターの角度位置を位置決めするための、ローターと共時回転しない位置決め要素である。
【0032】
さらに、遠心ローターの回転軸の周囲の、ある角度回転において遠心機の遠心ローターを位置決めするための方法が提案される。方法は下記の諸工程を含む。すなわち、遠心ローターと共時回転することが可能な、カウンター位置決め要素は、遠心ローターと共時回転しない、位置決め要素と相互作用を持つための動作範囲に置かれること;および、遠心ローターは、位置決め要素の、カウンター位置決め要素との相互作用によって位置決めされること、である。
【0033】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、回転軸の周囲に回転が可能であり、生物試料受容用容器を回旋軸的に登載するのに好適な遠心ローター、容器ホールダーの回旋運動の第1ストップ、および、容器ホールダーのカウンター位置決め要素との相互作用によって、ある変位角においてストップに対し容器ホールダーを保持するのに好適な位置決め要素である。
【0034】
さらに、遠心ローターに回旋軸的に登載される、生物試料受容用容器ホールダーの変位角を位置決めするための方法が提案される。方法は下記の諸工程を含む。すなわち、位置決め要素は、容器ホールダーのカウンター位置決め要素と相互作用させられること;容器ホールダーは、容器ホールダーの回旋運動に対するストップと接触すること;容器ホールダーの変位角は、位置決め要素とカウンター位置決め要素との相互作用によってストップに位置決めされること、である。
【0035】
さらに、生物試料受容用容器の容器ホールダーが提案される。容器ホールダーは、遠心機に使用するのに好適であり、容器を保持するための保持部材、および、位置決め要素と嵌合するような形状を持つカウンター位置決め要素を含む。この嵌合のために、遠心機における、容器ホールダーの角度位置および/または変位角を位置決めすることが可能である。現実のストップは、一般に、容器ホールダーが挿入される遠心機カップに登載される。
【0036】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、認識性を向上させた少なくとも一つの容器部分を有する、生物試料受容用容器のホールダー;認識性を向上させた容器部分と連結する、ホールダーの記録区域に照射するための放射線源;記録区域からの放射線強度を測定するためのセンサー;および、測定された強度を、定められた閾値と比較することによって、容器の有無を記録するように設計される評価ユニットである。
【0037】
さらに、容器用ホールダーにおける生物試料受容用容器の有無を検出するための方法が提案される。方法は、下記の諸工程を含む。すなわち、認識性を向上させた容器部分と連結する、ホールダーの記録区域が照射されること;記録区域からの放射線の強度が測定されること;容器の有無が、測定された強度と、定められた閾値との間の比較によって記録されること、である。
【0038】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、生物試料用容器を受容するための容器ホールダー;超音波源および超音波センサーを有するセンサーユニット;超音波センサーのセンサーデータの関数として容器の開放状態を決め、かつ、超音波センサーのセンサーデータの関数として、容器開放下に、容器における物質の可能な存在を決めるための評価ユニットである。
【0039】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。部分は、補給分の容器を保持するためのコンテナステーション;容器の性質に関する情報を含む、コンテナステーションにおけるマーキング;および、マーキングを読み取るための放射線センサーである。
【0040】
さらに、容器のコンテナステーションにおける生物試料受容用容器の性質を検出するための方法が提案される。方法は、下記の諸工程を含む。すなわち、容器の性質に関する情報を含む、コンテナステーションにおける第1マーキングが照射されること;および、第1マーキングからの放射線の第1強度が測定されること;容器の性質が、測定される第1強度の関数として記録されること、である。
【0041】
さらに、それぞれが、一生物試料用容器のために意図される、複数の、容器保持位置を含む、遠心機の占拠をチェックする方法が提案される。方法は下記の諸工程を含む。すなわち、容器保持位置について、その中に容器が存在するかどうかが記録されること;容器保持位置に存在すると記録された容器の全数が保存されること;容器保持位置に存在すると記録された容器の全数に応じて、容器保持位置に容器を分配するための少なくとも一つの条件が決められること;容器保持位置に存在すると記録された容器の分配が、該条件と合致するかどうかについてチェックが行われること、である。
【0042】
さらに、本発明は、開示される方法を実行するための装置に関し、かつ、個々の方法工程を実行するための装置の部分も含む。これらの方法工程は、ハードウェア成分によって、適切なソフトウェアを用いるコンピュータプログラムによって、前記二者の組み合わせによって、あるいは、他の任意のやり方によって実行してよい。さらに、本発明は、前述の装置が動作する方法もその主題とする。本発明は、装置の各機能を実行するための方法工程を含む。
【発明を実施するための最良の形態】
【0043】
本発明を例示するためのいくつかの実施態様が、図面に示され、かつ、以下により詳細に説明される。
基本概念
以下に記載される生物試料を処理するための装置は、生物試料を処理するための方法、または手順工程の効率的稼動を可能にするか、または支援する。装置は、下記の有用局面の内の一つ以上を履行することが好ましい。
【0044】
一有用局面は、遠心機内部において方法工程の内のいくつかを、かつ、特異的に試料の遠心そのものだけでなく、遠心をまったく含まない他の工程を稼動することである。遠心機においてこのような方法工程を実行することは、例えば、試料用容器のホールダーとしての遠心装置が、さらに、他の手順工程にも効率的に使用が可能となるという利点を持つ。同時に、ある場合、遠心機の外部の対応装備無しで済ますことが可能となる。同時に、試料の、遠心機への、および遠心機からの移送が低減される。同時に、移動距離が短縮される。その結果、時間の節約が可能となり、クロス・コンタミネーションの危険の最小化が可能となる。
【0045】
さらに、遠心機における手順工程を実行するために、遠心機における位置から試料を排除し、遠心機における位置に試料を導入し、または、遠心機内の異なる位置の間で試料を移送することは有用である。このために、特に、試料を輸送する二つの方法が利用可能である。
【0046】
第一に、試料が液体である場合、ピペット転送することが可能である。このために、装置は、ピペット転送ユニット(例えば、図7参照)を有してもよい。第二に、試料を含む容器は輸送されてもよい。このような容器は、望みのものであれば、どのような型式のものであってもよい。容器は、カラム、例えば、遠心カラム、すなわち、単一スピンカラム、あるいは、反応または収集容器、例えば、エッペンドルフチューブ、または類似の容器、例えば、蓋付き、または蓋無しのプラスチック容器であってもよい。遠心機内部の第1位置から、遠心機内部または外部の第2位置へ、この種の容器を転換するために、装置は、例えば、容器のための可動性グリッパーを有していてもよい。
【0047】
試料を輸送するための、これらの、および類似の方法は、場合によっては遠心機を使用することなく履行してもよい。
【0048】
図示の実施態様とは独立に、グリッパーのいくつかの局面が提案される。すなわち、生物試料受容用容器を把捉し、解除するために好適なグリッパーが提案される。このようなグリッパーは、容器を把捉し、解除するために移動が可能なグリップ要素、グリップ要素を締めつけるのに好適なクランプ要素、リフト要素、および、リフト要素の上昇移動を駆動し、それによってグリップ要素を移動させる、リフト要素用の駆動部を含む。
【0049】
クランプ要素は、任意に、グリップ要素を開放方向において締めつけるために好適となっていてもよい。もう一つの任意の選択肢として、リフト要素の上昇移動は、グリップ要素を閉鎖方向に移動させる。別態様として、クランプ要素は、グリップ要素を閉鎖方向に締めつけるのに好適である。さらに別の任意の選択肢として、リフト要素の上昇移動は、グリップ要素を開放方向に移動する。
【0050】
さらに、クランプ要素は、任意に、容器を解除するために、グリップ要素を締めつけるのに好適である。さらに別の選択肢として、リフト要素の上昇移動は、容器を把捉するためにグリップ要素を移動する。別態様として、クランプ要素は、容器を把捉するためにグリップ要素を締めつけるのに好適である。さらに別の選択肢として、リフト要素の上昇移動は、容器を解除するためにグリップ要素を移動する。
【0051】
通常、グリップ要素は、容器の頸部に嵌合するのに好適な陥凹を持つ。グリップ要素は、任意に、第1グリップ要素であり、さらにグリッパーは、第1グリップ要素と類似の性質を持つ、第2グリップ要素を持つ。さらに、グリッパーを、ピボット軸の周囲に回旋軸的に登載することが可能である。この場合、グリップ要素は、通常、容器のために中心軸を定め、ピボット軸は、中心軸とは異なる。
【0052】
さらに、グリッパーを用いて生物試料受容用容器を把捉するための方法が提案される。方法は下記の諸工程を含む。すなわち、リフト要素の上昇運動を生成すること;リフト要素の上昇運動を、閉鎖方向に向かう、あるいは、容器を把捉するための、グリップ要素の運動に転換すること、その際、運動は、クランプ要素が、グリップ要素に及ぼす力に対して反対方向であり;および、グリップ要素を用いて容器を把捉すること、から成る工程である。別態様として、容器を把捉するために、例えば、グリッパーが、容器の内部に向けられた容器表面において容器を把捉する場合、リフト要素の上昇運動も、開放方向に向かうグリップ要素の運動に転換される。
【0053】
さらに、グリッパーを介する、生物試料受容用容器を解除するための方法が提案される。この方法は、下記の諸工程を含む。すなわち、リフト要素の上昇運動を生成し、それによって開放方向へのグリップ要素の運動を可能とすること、クランプ要素を介して容器を解除するために、開放方向へ向かうグリップ要素の運動を産生すること、および、グリップ要素を介して容器を解除すること、から成る工程である。別態様として、リフト要素の上昇運動はまた、容器の解除が、クランプ要素によって生成されるようにするために、閉鎖方向に向かうグリップ要素の運動を可能としてもよい。
【0054】
さらに、生物試料を受容するための容器を取り扱うためのグリッパーユニットが提案される。グリッパーユニットは、下記の部分を含む。z方向に動くことが可能なグリッパー部材、および、第1位置から第2位置へグリッパー部材に対して動くことが可能な、容器把捉用グリッパー、および、第1位置から第2位置へグリッパーを動かすためのドライブである。
【0055】
グリッパーユニットは、任意に、容器を、別の容器に挿入するように設計されてもよい。ドライブは、任意に、電気ドライブである。第1位置から第2位置へのグリッパーの動きは、任意に、z方向以外の方向において起こる。第1位置から第2位置へのグリッパーの動きは、任意に、z方向に垂直な方向において起こる。第1位置から第2位置へのグリッパーの動きは、任意に、回旋軸の周囲の回旋運動である。回旋軸は、任意に、z方向に平行に延びる。
【0056】
さらに、サンプル試料、好ましくはサンプル液から得られる生体分子を自動的に処理するための装置が提案される。装置は下記の要素を含む。先ず、それぞれが、フィルター容器を脱離可能に受容し保持するための少なくとも一つの第1開口;および、別の、任意に密封される容器を脱離可能に受容し保持するための少なくとも一つの第2開口を含む、複数のコンテナを保持し、回転するためのローターを含む遠心機;および、前記第1開口から前記フィルター容器を排除するための手段;前記フィルター容器を前記別の容器と組み合わせる手段であって、組み合わせを、二つの容器が、遠心機と共に回転可能となるように、かつ、フィルター容器の容量と別容器の間に液的接続が与えられるように行う手段、である。
【0057】
取り扱いユニットは、任意に、前記第1開口から、前記第2開口に付着する前記別容器へと運ぶための手段を含む。さらに、取り扱いユニットは、任意に、前記フィルター容器または前記密封容器と同軸である、容器の中心線の周囲に、前記フィルター容器または前記別容器を回転させるための手段を含む。前記第1開口から前記第1容器を排除するための手段は、任意に、前記密封容器から前記フィルター容器を同軸方向に分離するための第1モーターを含む。前記別容器の上に前記フィルター容器を設置するための手段は、任意に、前記フィルター容器を前記別容器に運ぶための少なくとも一つの第2モーターを含む。
【0058】
さらに、生物試料保持用容器を取り扱うためのグリッパーユニットが提案される。この容器は、開放位置および閉鎖位置を占拠することが可能な蓋を持つ。グリッパーユニットは、容器を把捉し、解除するためのグリッパー、および、容器に対し定められた位置に蓋を保持するための蓋ホールダーを含む。定められた位置は、蓋の開放位置である。
【0059】
さらに、前述のグリッパーユニットを含むシステムが提案される。システムは、その上に、遠心機を含み、グリッパーは、遠心機に容器を挿入するのに、または遠心機から容器を排除するのに好適である。
【0060】
容器は、任意に、プラスチックで製造される。蓋は、任意に、容器に付着される。グリッパーユニットは、任意に、作業プレートの平面に対して垂直なz方向に、または、作業プレートの平面にそったx−y方向に可動である。容器は、任意に、円形断面、好ましくは、2cm、1cm未満の直径を持つ円形断面を持つ。蓋は、任意に、容器の開口を閉鎖するのに好適である。蓋は、任意に、コネクターを介して容器に接続される。グリッパーは、任意に、容器がグリッパーによって把捉される時、それを通じて蓋のコネクターを通過させることが可能な陥凹を有するグリップ要素を持つ。蓋ホールダーは、任意に、蓋のための機械的ストップを含む。蓋は、コネクターによって機械的ストップに押しつけられる。グリップ要素は、任意に、容器を把捉し、解除するために動くことが可能である。容器ホールダーは、任意に、液体を処理するためのデバイスである。蓋ホールダーは、グリップ要素が容器を摘みあげた場合、蓋ホールダーが、蓋にそって滑走またはガイドされるように任意に構成される。任意に、取り扱いは容器を容器ホールダーに設置することを含み、容器ホールダーは蓋受容体を有し、および、蓋ホールダーは、設置プロセス時、蓋受容体に蓋を設置するのに好適である。任意に、取り扱いは、容器ホールダーから容器を排除することを含み、容器ホールダーは蓋受容体を有し、かつ、蓋受容体は、設置プロセス時、蓋受容体に蓋を設置するのに好適である。任意に、取り扱いは、容器ホールダーから容器を排除し、容器ホールダーは蓋ホールダーを有し、かつ、蓋ホールダーは、排除プロセス時、蓋受容体から蓋を排除することが可能である。蓋受容体および蓋ホールダーは、任意に、容器に対し蓋の同じ位置を定める。
【0061】
さらに、容器ホールダーの中に、または容器ホールダーから容器を輸送するための方法が提案される。容器は、該容器の開口を閉鎖するために付着した蓋を含む。方法は、グリッパーユニットを介して容器を把捉または保持すること;容器に対して定められた位置に蓋を保持すること;および、容器に対し蓋の定められた位置を保持しながら、グリッパーユニットを用いて容器ホールダーの中へ、または容器ホールダーから容器を動かすこと、から成る諸工程を含む。
【0062】
容器を輸送するための方法は、任意に、グリッパーユニットを用いて容器ホールダーから容器を排除するための工程であり、一方、容器ホールダーの中に、または容器ホールダーから容器を動かす工程は、グリッパーによる容器ホールダーからの容器の排除である。任意に、容器ホールダーから容器を排除する工程は、容器ホールダーの蓋受容体から蓋を排除することを含む。任意に、容器ホールダーは、容器の蓋のための蓋受容体を有し、次に、容器ホールダーから容器を排除する工程は、容器に対する蓋の定められた位置を保持しながら、蓋受容体から蓋を排除することを含む。
【0063】
任意に、容器を輸送するための方法は、グリッパーユニットを用いて容器ホールダーの中に容器を設置するための方法であり、一方、容器ホールダーの中に、または容器ホールダーから容器を動かす工程は、容器ホールダーの中に容器を設置または挿入することを含む。任意に、容器ホールダーの中に容器を設置または挿入する工程は、容器ホールダーの蓋受容体の中に蓋を挿入することを含む。任意に、蓋を保持する工程では、蓋は、グリッパーユニットの蓋ホールダーによって容器に対して定められた位置に保持される。任意に、容器を設置するために、容器は、グリッパーユニットによって解除される。容器は、任意に、円形断面、好ましくは、2cmまたは1cm未満の直径を持つ円形断面を持つ。
【0064】
任意に、容器ホールダーは、容器の蓋のための蓋受容体を持ち、次に、容器ホールダーに容器を挿入する工程は、容器に対する蓋の定められた位置を維持しながら、蓋受容体の中に蓋を挿入することを含む。
【0065】
さらに、グリッパーユニットを用いて第1容器ホールダーから第2容器ホールダーへ容器を輸送するための方法が提案される。該方法は、先行パラグラフに記載されるように、第1容器ホールダーから、または、第1容器ホールダーの第1保持位置から、容器を排除すること、および、先行パラグラフに記載されるように、第2容器ホールダーの中に、または、第2容器ホールダーの第2保持位置の中に容器を挿入することから成る工程を含む。特に、容器は、第1容器ホールダーの第1保持位置から、第2容器ホールダーの第2容器保持位置へ移送される。第1および第2保持位置は、一般的に異なる。第1保持位置および第2保持位置は、同じ容器ホールダー内にあってもよいし、または、異なる容器ホールダー内にあってもよい。
【0066】
さらに、容器の開口を閉鎖するために、蓋を付着させた、生物試料受容用容器のための容器ホールダーが提案される。容器ホールダーは、遠心機において使用するのに好適であり、容器を保持するための少なくとも一つの保持部材、および、容器に付着させた蓋を保持するための少なくとも一つの蓋受容体を含む。蓋受容体は、容器のためのグリッパーユニットの蓋ホールダーによる蓋へのアクセスを可能とする形状を持つ。
【0067】
任意に、一つの、または複数の容器ホールダーは遠心機に登載される。任意に、一つのまたは複数の容器ホールダーは、遠心機に回旋的に登載される、例えば、遠心ローターに回旋的に登載される。蓋は、任意に、開放される、すなわち、蓋の開放位置にある。
【0068】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料受容用容器を保持するのに好適で、容器の開口を閉鎖するための蓋を付着させた容器ホールダー、および、蓋ホールダー、または容器のためのグリッパーユニットで、容器に対し定められた位置に蓋を保持するためのグリッパーユニットである。容器ホールダーは、容器に付着した蓋を保持するための蓋受容体を持ち、蓋ホールダーによる蓋へのアクセスを可能とする。装置は、その上に、遠心機を含み、容器ホールダーは、遠心機において使用するのに好適である。
【0069】
本パラグラフの直前先行の2パラグラフにおいて記載される容器ホールダー、または装置では、蓋に対する蓋ホールダーのアクセスは、任意に、蓋ホールダーによる蓋に対する機械的接触を含む。蓋受容体における陥凹は、任意に、蓋ホールダーによる蓋へのアクセスを可能とする。装置は、任意に、蓋ホールダーによる蓋へのアクセスが、容器が装置のグリッパーによって把捉される時に、獲得されるように設計される。
【0070】
容器は、任意に、プラスチックで製造される。蓋は、任意に、容器に付着される。容器は、任意に、断面が円形であり、好ましくは、2cmまたは1cm未満の直径を持つ。蓋は、任意に、容器の開口を閉鎖するのに好適である。
【0071】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を保持するための少なくとも一つの容器ホールダーを有する回転可能な遠心機、および、容器ホールダーに容器を挿入するためのグリッパーである。
【0072】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を保持するための少なくとも一つの容器ホールダーを有する回転可能な遠心ローター、および、容器ホールダーから容器を排除するためのグリッパーである。
【0073】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を保持するための少なくとも一つの容器ホールダーを有する回転可能な遠心ローター、および、容器ホールダーの第1保持位置から容器ホールダーの第2保持位置へ容器を移送するためのグリッパーである。任意に、第1および第2保持位置は異なる。第1および第2保持位置は、同じ容器ホールダーにあっても、または異なる容器ホールダーにあってもよい。
【0074】
これらの装置では、グリッパーは、任意に、容器の突出部分と嵌合することによって容器を把捉するように設計される。グリッパーは、開口、または主要開口を有する容器、および容器の突出部分に対して任意であり、次に、グリッパーは、容器の開口から離れた、容器の突出部分の側面において容器を把捉するように設計される。任意に、グリップ要素は、容器の頸部と嵌合するのに好適で、かつ、容器の開口から離れた、頸部の側面と嵌合するのに好適な窪みを含む。容器は、任意に、生物試料を受容するためのものである。容器ホールダーや、任意に、遠心ローターに回旋的に登載される。グリッパーは、任意に、容器ホールダーの角度位置または変位位置を位置決めするための位置決め要素を含む。位置決めは、任意に、該位置決め要素と、カウンター位置決め要素との相互作用によって実行される。変位位置を位置決めするための位置決め要素は、任意に、容器ホールダーのストップと、例えば、遠心ローターと共時回転可能なストップと協力するように設計される。グリッパーは、任意に、下記の部分を含む。容器を把捉および解除するために動くことが可能なグリップ要素、グリップ要素をクランプするのに好適なクランプ要素、リフト要素、および、リフト要素の挙上運動を駆動し、それによってグリップ要素を動かすのに好適なリフト要素用ドライブである。移送は、任意に、容器の回転運動を含む。容器ホールダーは、任意に、遠心機から排除可能である。
【0075】
クランプ要素は、任意に、開口の方向においてグリップ要素をクランプするのに好適である。リフト要素の挙上運動は、任意に、グリップ要素を閉鎖方向に動かす。クランプ要素は、任意に、閉鎖方向にグリップ要素をクランプするのに好適である。リフト要素の挙上運動は、任意に、グリップ要素を開放の方向に動かす。クランプ要素は、任意に、グリップ要素をクランプし、そうすることによって容器を解除することが可能である。リフト要素の挙上運動は、任意に、グリップ要素を動かし、そうすることによって容器を把捉することが可能である。クランプ要素は、任意に、グリップ要素をクランプし、そうすることによって容器を把捉することが可能である。リフト要素の挙上運動は、任意に、グリップ要素を動かし、そうすることによって容器を解除することが可能である。
【0076】
容器ホールダーは、任意に、遠心ローターに可動的に登載される。この場合、位置決め手段は、任意に、挿入/排除/移送の際、容器ホールダーの運動を阻止または制限することが可能である。任意に、移送は、直接行われる。すなわち、グリッパーは、第1保持位置からの排除から、第2保持位置への挿入まで全期間を通じて容器を保持する。移送時、さらに任意に、第3保持位置があり、さらに、装置は、第3保持位置と第1または2保持位置の間で容器を移送することが可能である。グリップ要素は、任意に、容器の頸部に嵌合するのに好適な、少なくとも一つの窪みを含む。グリップ要素は、任意に、第1グリップ要素であり、グリッパーはさらに、第1グリップ要素と類似の性質を持つ第2グリップ要素を含む。グリッパーは、任意に、回旋軸の周囲に回旋的に登載される。グリップ要素は、任意に、容器のために中心軸を定め、次に回旋軸は、中心軸とは異なる。
【0077】
さらに、グリッパーを介して、容器を遠心ローターの容器ホールダーに設置するための方法が提案される。その際、容器ホールダーは、容器のための保持位置を持つ。方法は下記の工程を含む。グリッパーは、保持位置に対して所定の相対位置に運ばれる;グリッパーは、容器を保持位置に設置するように動かされる;容器はグリッパーによって解除される。
【0078】
さらに、グリッパーを介して、遠心ローターの容器ホールダーから容器を排除するための方法が提案される。その際、容器ホールダーは、容器のための保持位置を持つ。方法は、下記の工程を含む。グリッパーは、保持位置に対して所定の相対位置に運ばれる;容器がグリッパーによって把捉される;グリッパーは、保持位置から容器を排除するように動かされる。
【0079】
さらに、グリッパーを介して、遠心ローターの容器ホールダーの第1保持位置から、遠心ローターの容器ホールダーの第2保持位置へ容器を移送するための方法が提案される。方法は、下記の工程を含む。グリッパーは、第1保持位置に対して所定の相対位置に運ばれる;容器がグリッパーによって把捉される;グリッパーは、第1保持位置から容器を排除するように動かされる;グリッパーは、第2保持位置に対して所定の相対位置に運ばれる;グリッパーは、第2保持位置に容器を設置するように動かされる;容器はグリッパーによって解除される。
【0080】
任意に、前述の方法は、遠心ローターの回転軸の周囲に容器ホールダーの、指定回転角度を調製する工程を含む。排除時および/または挿入時、グリッパーおよびグリッパー部材は、任意に、z方向に共時運動させられ、第2保持位置に対して容器を位置決めする際、グリッパーは、任意に、グリッパー部材に対して動かされる。さらに、方法は、任意に、角度位置、または変位角を固定する工程を含む。例えば、容器ホールダーの変位角は、グリッパーの位置決め要素を、容器ホールダーのカウンター位置決め要素と相互作用させることによって固定することが可能であり、容器ホールダーは、容器ホールダーの回旋運動のストップと接触し、かつ、容器ホールダーの変位角は、ストップにおける位置決め要素とカウンター位置決め要素との相互作用によって固定される。容器ホールダーの回旋角度のストップは、任意に、遠心ローターと共時回転することが可能である。保持位置は、任意に、遠心機から排除することが可能な容器ホールダーにある。
【0081】
容器を把捉する工程は、任意に、下記の部分工程を含む。リフト要素の挙上運動を産生すること;リフト要素の挙上運動を、容器を把捉するために、グリップ要素の閉鎖方向または開放方向の運動に変換すること、その際、運動は、クランプ要素がグリップ要素に及ぼす力に対して、対向方向に向けられ;それゆえ、グリップ要素を介して容器を把捉することから成る諸工程である。
【0082】
容器を解除する工程は、任意に、下記の部分工程を含む。リフト要素の挙上運動を産生すること、その際、該挙上運動によって、開放方向に向かうグリップ要素の運動が可能とされ;クランプ要素を介して容器を解除するために、開放方向または閉鎖方向にグリップ要素の運動を産生すること;および、したがってグリップ要素を介して容器を解除することから成る諸工程である。
【0083】
容器を把捉する工程は、任意に、容器の開口、または主開口から離れた容器の突出部の側面において容器を把捉することを含む。
【0084】
第2保持位置に対して容器を位置決めする際、グリッパーは、任意に、z方向とは異なる方向に、グリッパー部材に対して動かされる。第2保持位置に対し容器を位置決めする際、グリッパーは、任意に、z軸に対して垂直に延びる平面においてグリッパー部材に対して動かされる。第2保持位置に対し容器を位置決めする際、グリッパーは、任意に、z軸に対して平行に延びる軸の周囲においてグリッパー部材に対して回旋される。任意に、第1および第2保持位置は異なる。それらの保持位置は、同じ容器ホールダーにあってもよいし、異なる容器ホールダーにあってもよい。グリッパーは、任意に、容器の突出部分と嵌合する。
【0085】
試料輸送のための前述の方法において、流体の調節的輸送を可能とし、例えば、遠心機における容器の自動輸送の際、不要の運動を阻止するために、遠心機、および遠心機に登載される容器ホールダーを固定および/または位置決めすることは有用である。何よりもまず、このような運動は、遠心ローターの、その回転軸周囲における回転、または、遠心ローターにおける容器ホールダーの、その回旋軸周囲における回旋であってもよい。
【0086】
それゆえ、下記の部分を有する、生物試料処理用装置が提案される。回転軸の周囲に回転することが可能な遠心ローター、遠心ローター用ドライブ、および、位置決め要素であって、ローターと共時回転可能なカウンター位置決め要素と相互作用を持つことによって遠心ローターの角度位置を決めるために、ローターと共時回転しない位置決め要素、である。
【0087】
角度位置の位置決めは、任意に、位置決め要素とカウンター位置決め要素の間の機械的嵌合によって実行される。遠心ローターは、任意に、生物試料受容用容器のための容器ホールダーを受容するのに好適である。カウンター位置決め要素は、容器ホールダー、または遠心ローターに登載される。任意に、装置は、遠心機、または遠心ローターの角度位置を検出するための手段を含む。次に、位置決め要素は、カウンター位置決め要素の操作範囲内に配されるように、検出された角度位置の関数として軸合わせすることが可能である。さらに、後述するように、位置決め要素は、任意に、容器ホールダーの変位角を決めるのに好適である。遠心ローターは、任意に、生物試料受容用容器のための容器ホールダーの回旋登載に好適であり、かつ、容器ホールダーの回旋運動に対するストップを有する。次に、位置決め要素は、カウンター位置決め要素との相互作用によって、ストップにおいてある変位角に容器ホールダーを保持することが可能である。
【0088】
位置決め要素は、容器を把捉するためのグリッパーユニットのグリップ部材に付着されてもよい。それとは別に、位置決め要素は、例えば、ピペットユニットに付着されてもよい。位置決めは、任意に、角度位置を0.1°の正確度で調整可能としてもよい。さらに、装置は、任意に、角度位置を1.5°の正確度で調整可能とする、遠心ローターを粗大に位置決めするための手段を含む。その上に、装置は、任意に、遠心ローターの角度位置を検出するための手段、例えば、遠心ローターの角度位置を1°の正確度で検出可能とする手段を含む。ドライブは、任意に、電気ドライブ、好ましくは、誘導ドライブ、すなわち、非同期モーターである。位置決め要素は、任意に、スパイク、および、スパイクのための陥凹を含むカウンター位置決め要素を含む。位置決め要素は、任意に、位置決めが、グリッパーの、容器ホールダーの容器保持位置に対するアクセスを可能とするように、グリッパー部材に付着される。位置決め要素は、任意に、z方向にグリッパー部材に対し剛強に登載される。バネ登載は、任意に、容器の長さよりも大きい、位置決め要素の移動を可能とする。容器は、任意に、円形断面を持ち、好ましくはプラスチックで製造される。位置決め要素は、任意に、容器ホールダーの保持位置に対して固定角度に配置される。装置は、任意に、複数のカウンター要素、好ましくは3を超える、6を超える、または10を超えるカウンター位置決め要素を含む。
【0089】
さらに、遠心ローターの回転軸の周囲の回転角度において遠心機の遠心ローターを位置決めするための方法が提案される。方法は下記の工程を含む。遠心ローターと共時回転が可能なカウンター位置決め要素は、遠心ローターと共時回転しない位置決め要素と相互作用を持つ操作範囲内に運ばれ、および、遠心ローターは、位置決め要素と、カウンター位置決め要素の相ド作用によって位置決めされる。
【0090】
カウンター位置決め要素は、任意に、ある角度間隔において、遠心ローターの回転軸周囲で遠心ローターの角度位置を、カウンター位置決め要素が操作範囲内に入るように選択することによって、位置決め要素との相互作用の操作範囲内に動かされる。
【0091】
カウンター位置決め要素は、任意に、下記の工程によって位置決め要素との相互作用の操作範囲内に動かされる。遠心ローターの、回転軸周囲の角度位置が検出され、位置決め要素は、検出された角度位置の関数として、位置決め要素が操作範囲内に配されるように軸合わせされる。
【0092】
遠心ローターの位置決めによって、遠心ローターの容器用保持位置の、遠心ローターの回転軸周囲における回転角度が任意に決められる。相互作用は、任意に、機械的嵌合、または磁気的相互作用である。該位置決めによって、遠心ローターの、そのローター軸周囲における回転角度が任意に決められる。遠心機における容器ホールダーの回転角度の位置決めと共に、容器ホールダーの変位角が、任意に、位置決めされるか、または固定される。
【0093】
さらに、生物試料処理用装置が提案される。装置は下記の部分を含む。ローター軸の周囲に回転可能で、生物試料受容用容器の容器ホールダーの回旋性登載に好適な遠心ローター、容器ホールダーの回旋運動のためのストップ、および、容器ホールダーのカウンター位置決め要素との相互作用によって、ストップに対しある変位角で容器ホールダーを押しつけるのに好適な位置決め要素である。
【0094】
容器ホールダーの回旋運動は、一般に、発振運動または変位運動と表示されてもよい。なぜなら、この運動は、一般に、変位角を定めるからである。
【0095】
位置決めは、任意に、前述の、角度位置決めのための位置決め要素を介して実行される。さらに、遠心ローターは、任意に、遠心ローターの遠心力によって引き起こされる回旋運動に対する第2ストップを含む。第1および/または第2ストップは、任意に、遠心ローターの上に登載されるか、または、遠心ローターと共に回転することが可能である。位置決めは、任意に、ストップに対して容器ホールダーを押しつけることによって実現される。ストップは、任意に、遠心ローターの遠心力によって引き起こされる参照回旋運動に対向する、容器ホールダーの回旋運動を制限する。回旋運動は、任意に、ほぼ水平軸の周囲に起こる。
【0096】
さらに、下記の要素を含む、生物試料処理用装置が提案される。ローター軸の周囲に回転可能で、生物試料受容用容器の容器ホールダーの回旋性登載に好適な遠心ローター、カウンター位置決め要素を含む容器ホールダー、容器ホールダーの回旋運動のためのストップ、および、カウンター位置決め要素との相互作用によって容器ホールダーをストップに接触させるのに好適な位置決め要素である。その際、容器ホールダーの変位角は、接触によって位置決め、または固定される。
【0097】
さらに、回旋的に遠心ローターに登載される、生物試料受容用容器の容器ホールダーの変位角を位置決めするための方法が提案される。方法は下記の工程を含む。位置決め要素は、容器ホールダーのカウンター位置決め要素と相互作用を持つようにさせられる;容器ホールダーは、容器ホールダーの回旋運動に対すストップと接触する;および、容器ホールダーの変位角は、ストップにおける位置決め要素とカウンター位置決め要素の相互作用によって位置決めされる。さらに、変位角は、回旋位置と呼ばれてもよい。
【0098】
位置決めは、任意に、前述の角度位置決めのための位置決め要素を用いて実行される。位置決めは、任意に、遠心ローターに登載されるストップに対し容器ホールダーを押しつけることによって実行される。
【0099】
さらに、生物試料受容用容器のための容器ホールダーが提案される。この容器ホールダーは、遠心機で使用するのに好適で、容器を保持するための保持部分、および、位置決め要素と嵌合する形状を持つカウンター位置決め要素を含む。この嵌合によって、遠心機における容器ホールダーの角度位置および/または変位角を位置決めすることが可能である。
【0100】
その上に、容器ホールダーは、任意に、遠心機に容器ホールダーを接続するのに好適な、接続部材を含む。接続部材は、任意に、回旋軸を定める。カウンター位置決め要素と、容器ホールダーの中心との間の距離は、任意に、カウンター位置決め要素と、容器ホールダーの辺縁との間の距離よりも大きい。カウンター位置決め要素は、任意に、位置決め要素を収容するための腔を含む。カウンター位置決め要素と位置決め要素の間の嵌合は、任意に、少なくとも一平面の方向におけるカウンター位置決め要素と位置決め要素の間の相対的運動を阻止するのに好適である。腔の断面は、任意に、腔の内部に向かって減少する。腔の一端の二つの対向点の間の間隔は、任意に、深度、または、位置決め要素が腔に挿入が可能な移動深度よりも小さい。容器ホールダーは、任意に、液体を処理するためのデバイスである。
【0101】
さらに、生物試料処理用装置が提案される。装置は下記の部分を含む。遠心機;生物試料受容用容器を保持するための保持部材を持つ、遠心機における容器ホールダー;および、位置決め要素である。容器ホールダーは、位置決め要素と嵌合することによって、遠心機における容器ホールダーの角度位置および/または変位角を位置決めするような形状を持つカウンター位置決め要素を含む。
【0102】
さらに、装置の操作が容易であると有用である。例えば、消耗品を補給するために、かつ、使用済み消耗品を排除するために前面部分、または、装置の、他の、簡単にアクセス可能な部分を与えることは有用である。特に、このセクションを、排除可能な、または引き出し可能なセクションとして、例えば、一つの、または複数の引き出しの形で与えることは有用である。
【0103】
さらに、装置が、典型的操作または負荷エラーを早期の段階で検出可能であることは有用である。例えば、インプットを互いに、および選ばれた手順について、一貫性に関してチェックすることは有用である。さらに、消耗品(例えば、処理液、容器、および/またはピペットチップ)による負荷を互いに、および選ばれた手順について、一貫性に関してチェックすることは有用である。
【0104】
処理ができるだけ少ない数の工程の後で開始可能となるように、ユーザーガイダンスをできるだけ単純なものとすることは有用である。ユーザーガイダンスは、できるだけ直観的なものとすべきである。例えば、グラフィックディスプレイを用いた構造化されたメニューガイドを与えることは有用である。さらに、メニューガイドを、めったに変更する必要のないインプットフィールドは、通常は見逃してもよい、任意のサブメニューを通じて到達可能となるように設計することは有用である。さらに、装置が、最後に使用されたか、または頻繁に使用される設定を保存し、高速アクセスのためにそれらを与えることは有用である。
【0105】
さらに、いくつかの異なる手順に適応可能となるように、装置を弾力的にすることが有用である。特に、QIAGEN社によって与えられるもののように、「結合−洗浄−溶出」およびその他の手順を含む広いスペクトラムがサポートされていると有用である。さらに、ソフトウェアの更新を介して生物試料処理のための他の手順も加えることが可能であるか、または、既存の手順が補正可能であると有利である。さらに、装置が、研究対象の、種々の数のサンプルを認識し、および/または、それらを弾力的にサポートすることが可能であると有用である。
【0106】
さらに、遠心機の温度を調整すること、特に、遠心機を冷却することは有用である。このために、下記の部分を含む、生物試料を遠心するための遠心機が提案される。コンテナ、コンテナ用蓋、コンテナの内部に配置される遠心ローター、遠心ローターのためのドライブ、蓋を冷却するための第1冷却デバイス、および、コンテナを冷却するための第2冷却デバイスである。
【0107】
第1冷却デバイスは、任意に、冷却ガスを介してコンテナを冷却するための冷却デバイスである。これは、任意に、コンテナを冷却ガスで噴射する噴射デバイスを含む。第1冷却デバイスの冷却ガスは、任意に、周辺空気である。
【0108】
第2冷却デバイスは、任意に、冷却ガスによってコンテナの外面を噴射するための噴射デバイスを含む。第2冷却デバイスの冷却ガスは、任意に、周辺空気である。任意に、第2冷却デバイスは、遠心ローター用ドライブとは独立に調節可能であり、および/または、第2冷却デバイスはさらに、ドライブを冷却するように設計される。
【0109】
任意に、第1および第2冷却デバイスは異なる。任意に、第1および/または第2冷却デバイスは冷却リブを含む。任意に、冷却リブは、水平および/または垂直に配置される。任意に、第1および/または第2冷却デバイスは、能動的冷却デバイスである。任意に、第1および/または第2冷却デバイスの、一つの、または複数の噴射デバイスは、それぞれ、ベンチレーターを含む。任意に、蓋は、好ましくはコンテナの外部から、コンテナの内部を閉鎖するのに好適である。任意に、コンテナは、蓋が閉鎖された時に、冷却ガスが、コンテナの内部に流入できないように、または、第1および/または第2冷却デバイスの冷却ガスが、コンテナの内部に流入できないように設計される。
【0110】
さらに、遠心機において生物試料を遠心するための方法が提案される。方法は、下記の工程を含む。遠心ローターに生物試料を納めること;蓋を用いて遠心機のコンテナを閉鎖すること;ドライブを介してローター軸の周囲に遠心ローターを回転させること;コンテナを冷却し、かつ、蓋を冷却すること、である。
【0111】
任意に、遠心コンテナの冷却は、噴射デバイスを用いて冷却ガスを遠心コンテナの外面に噴射することによって実行される。任意に、遠心コンテナの内面、または、遠心コンテナの内部は、冷却ガスによって噴射されない。任意に、噴射デバイスは、ドライブとは独立である。任意に、遠心ローターは、遠心コンテナの内部に配置される。
【0112】
その上に、下記の部分を含む遠心機が提案される。遠心コンテナ;遠心コンテナの内部に配置される遠心ローター;遠心コンテナ用蓋、および、周辺空気を用いる蓋冷却用デバイスである。装置は、遠心コンテナの内部とは分離した、周辺空気のための流通路を定める。
【0113】
任意に、蓋冷却用装置は、蓋を周辺空気で噴射するための噴射デバイスを含む。任意に、蓋は、内部域を持ち、流通路は、蓋の内部域を貫通する。任意に、冷却リブは、流通路と熱的に接触する、蓋の領域の中に配置される。任意に、冷却リブは、流通路の流れの方向に軸合わせされる。任意に、蓋は、遠心機の内部から熱を排除するための手段を含む。任意に、周辺空気は環境温度にある。任意に、蓋冷却用装置は、吸引された周辺空気の速度プロフィールを、好ましくは、ある角度で切断され、異なる角度でバック設定される冷却リブ辺縁を用いて均一化するための手段を含む。
【0114】
さらに、前述の遠心機の内の一つ、すなわち、その温度を調節するための、特に、遠心機を冷却するための装備を持つ遠心機を含む、生物試料用処理装置が提案される。
【0115】
さらに、遠心機を冷却するための方法が提案される。この遠心機は、遠心コンテナ、遠心コンテナの内部に配置される回転可能な遠心ローター、および、遠心コンテナ用の蓋を持つ。方法は下記の工程を含む。周辺空気を吸い込むこと、および、遠心コンテナの内部と隔てられた蓋の中の流通路にそって周辺空気を通過させることである。任意に、方法は、前述の遠心機の内の一つ、すなわち、その温度を調節するための装備を持つ遠心機において実行される。
【0116】
さらに、遠心機において生物試料を遠心するための方法が提案される。方法は下記の工程を含む。遠心機に生物試料を納めること;ドライブを介してローター軸の周囲に遠心機の遠心コンテナ内部の回転ウィールを回転させること;ドライブおよび遠心コンテナの外面を冷却剤で噴射すること、である。
【0117】
前述の実施態様とは独立に、さらに遠心機の他の局面が提案される。特に、生物試料を遠心するための遠心機が提案される。遠心機は下記の成分を含む。ローター軸の周囲に回転可能で、少なくとも一つの、生物試料用容器を受容するローターウィール;遠心コンテナ;および、ローター軸の周囲に回転可能で、ローターウィールと遠心コンテナの間に配される障壁であり、遠心プロセス時、ローターウィールの外方境界の高さは、容器の上縁、または容器用の容器ホールダーの上縁が占める位置の高さよりも小さい。
【0118】
さらに、容器中の物質表面の高さを決める方法が提案される。物質は、任意に、液体であるが、さらに、別の物質、例えば、粉末であってもよい。方法は下記の工程を含む。容器中の物質の表面は、放射線源によって照射される;物質の表面から来る放射線は、放射計によって測定される;放射計によって測定された放射線に応じて、放射線源、放射計、および容器は、互いに、下記が満たされるような空間関係に置かれる。
−物質表面に対する垂直線と、放射線源から物質表面へ通過する第1ビームとの間の第1角度が、
−物質表面に対する垂直線と、物質表面から放射計に通過する、第1ビームによって反射されるビームとの間の第2角度とほぼ等しくなり;物質表面の高さは、放射線源、放射計、および容器の空間関係の関数として決められる。
【0119】
任意に、照射は、ペンシルの直径が0.3mmと3cmの間の範囲、好ましくは1mmと6mmの間、例えば、約3mmであるペンシルビームを通じて実行される。任意に、表面は、空気と液体の間のインターフェイスである。任意に、放射線源および放射計は、同じ筐体に収容される。任意に、放射線源および放射計は、光センサーの中にある。任意に、放射線源、放射計、および容器を、互いにある空間関係に納めることは、放射線源を傾けることを含む。任意に、接着力によってもたらされる液体表面の曲線を考慮に入れてもよい。任意に、物質表面の高さは、第1および第2角度は同じであるという事実を用いて決められる。
【0120】
さらに、生物試料を処理するための装置が提案される。装置は、物質受容用容器のための容器ホールダー、および、容器における物質の表面の高さを決めるための充填レベル計を含む。その上に、充填レベル計は、物質の表面を照射するための放射線源;物質の表面から到来する放射線を測定するための放射センサー;位置決めデバイス;および調節ユニットを含む。調節ユニットは、放射計によって測定される放射線の関数として、放射線源、放射計、および容器を、互いに、ある空間関係に納めるように装備される。これは、
物質表面に対する垂直線と、放射線源から物質表面へ通過する第1ビームとの間の第1角度が、
物質表面に対する垂直線と、物質表面から放射計に通過する、第1ビームによって反射されるビームとの間の第2角度とほぼ等しくなるようにするためであり、かつ、
物質表面の高さを、放射線源、放射計、および容器の空間関係の関数として決めるためである。
【0121】
任意にさらに、充填レベル計の光学センサーまたは光センサーは、本出願に記載されるように、可動センサーを位置決めするために、または、容器の有無を決めるために好適である。
【0122】
その上、生物試料を処理するための装置が提案される。装置は、光学センサーおよび超音波センサーが付着される可動ユニット;液体コンテナ用ホールダーにおける液体コンテナの有無を、光学センサーのセンサーデータの関数として検出するための手段;および、液体コンテナに含まれる液体の充填レベルを、超音波センサーのセンサーデータの関数として決めるための手段を含む。
【0123】
前述の実施態様とは独立に、さらに、感受装置の別局面が提案される。したがって、下記の部分を含む、生物試料を処理するための装置が提案される。生物試料受容用容器のホールダー、容器は、認識性を向上させた少なくとも一つの容器部分を持つ;ホールダーの記録域を照射するための放射線源、記録域は、認識性を向上させた容器部分と関連する;記録域から到来する放射線の強度を測定するためのセンサー;および、測定された強度と定められた閾値とを比較することによって容器の有無を記録するように装備される評価ユニットである。
【0124】
容器は、任意に、遠心容器、フィルター容器、収集容器、またはピペットチップである。遠心容器および収集容器は、一般に、容器に、または容器から試料をピペット注入または排除するための主開口、および、任意に蓋を有する、例えば、いわゆるスピンチューブ、またはエッペンドルフチューブである。さらに、遠心容器は、一般に、主開口の反対の、遠心容器の側面に配置される流出口を持つ。認識性を向上させた容器部分は、任意に、膜、フィルター、フィルター膜、蓋ヒンジ、および/または容器の蓋である。
【0125】
センサーは、任意に、可動である。次に、装置は、装置の上に調整マークを照射し、該調整マークから到来する放射線を測定することによってセンサーの位置を決めるのに好適であってもよい。次に、センサーの運動は、任意に、少なくとも一つの方向、好ましくは二つの方向において、容器用グリッパー、または、ピペッチチップの受容用ピペットユニットの運動と連結する。
【0126】
後述するように、センサーは、任意に、容器における物質の存在、または充填レベルを決めることが可能である。保持領域から到来する放射線は、任意に、放射線源から到来する反射放射線である。放射線は、典型的には、電磁放射線であり、好ましくは、可視か、または赤外スペクトラム範囲にある。評価ユニットは、任意に、閾値未満の測定強度については不在を記録し、閾値を超える測定強度については存在を記録するように設計される。
【0127】
任意に、照射は、認識性を向上させた容器部分の広がりの0.3倍から1.3倍の直径を持つスポットを用いて実行される。放射線源およびセンサーは、任意に、共同運動が可能である。その上に、装置は、保持域に対して放射線源およびセンサーを位置決めするための位置決め手段を含む。
【0128】
放射線源からの放射線は、任意に、約3mm直径のスポットを持つ。認識性を向上させた容器部分は、任意に、少なくとも3mmx3mmの区域を持つ。認識性を向上させた容器部分は、一般に、容器の有無の間の信号差、または強度差が増加された容器部分である。
【0129】
さらに、容器用ホールダーにおける生物試料受容用容器の有無を検出するための方法が提案される。方法は下記の工程を含む。ホールダーの記録域が照射され、その際、記録域は、認識性を向上させた、容器の容器部分と連結され;記録域から到来する放射線の強度が測定され;容器の有無が、測定強度と、定められた閾値との比較を介して記録される。
【0130】
照射および測定が、任意に、可動センサーユニットによって実行され、方法は、任意に、前述のものの外に下記の工程を含む。容器ホールダーに対してセンサーを位置決めすることである。任意に、センサーユニットの位置は、装置に調整マークを照射し、調整マークから到来する放射線を測定することによって決められる。
【0131】
さらに、生物試料を処理するための装置が提案される。装置は下記の部分を含む。生物試料用容器を受容するための容器ホールダー;超音波源および超音波センサーを有するセンサーユニット;および、超音波センサーからのセンサーデータの関数として、容器の開放状態を決め、かつ、超音波センサーからのセンサーデータの関数として、かつ、容器が開放の時、容器における物質の可能な存在を決めるための評価ユニットである。
【0132】
物質は、任意に、液体である。評価ユニットは、任意に、物質の充填レベルを、恐らく超音波センサーのセンサーデータの関数として決めるのに好適であるか、または決めるように配置される。評価ユニットは、任意に、発射超音波信号と、物質表面によって反射される超音波信号との間の移動時間を測定することによって、物質の充填レベルを決めるのに好適であるか、または決めるように配置される。センサーユニットは、任意に、可動であり、その上、放射線センサー、および、放射線センサーのセンサーデータの関数として、容器に対してセンサーユニットを位置決めするための位置決め手段を含む。放射線センサーは、任意に、容器の存在を決めるのに好適である。決定は、例えば、本出願の別の場所(例えば、次ページを参照)に記載される、容器の存在を決めるための方法を用いて実行してもよい。
【0133】
さらに、任意に、容器は、認識性を向上させた少なくとも一つの容器部分を持つこと、および、センサーユニットは、ホールダーの記録域を照射するための放射線源を有することが提案される。その際、記録域は、認識性を向上させた容器部分と連結される。次に、放射線センサーは、記録域から到来する放射線の強度を測定するのに好適であり、評価ユニットは、測定強度と定められた閾値との間で比較を実行することによって容器の有無を記録するように装備される。
【0134】
さらに、下記の部分を含む、生物試料を処理するための装置が提案される。容器の補給を維持するためのコンテナステーション;容器の性質に関する情報を含むコンテナステーション上のマーキング;および、マーキングを読み取るための放射線センサーである。
【0135】
マーキングは、任意に、コンテナステーションの辺縁から突出する要素である。マーキングは、任意に、コンテナステーションと一体的に形成される、少なくとも一つのマーキング要素を含む。マーキングは、任意に、二進情報、すなわち、イエス/ノー情報をコードする、少なくとも二つのマーキング要素を含む。コンテナステーションは、任意に、装置に対し各種方向に与えることが可能となるように、または装置に挿入可能となるように構成される。マーキングは、任意に、マーキングの読み取りが、各種の方向の内から選ばれた、ある特定の方向とは独立するように構成される。
【0136】
コンテナは、任意に、それぞれが一つの容器のための、複数の保持位置を含み、次に、光学センサーは、この複数の保持位置の各保持位置における容器の存在を検出するのに好適である。この決定のために、下記のパラグラフに記載される方法が用いられてもよい。
【0137】
任意に、コンテナステーションは、放射線源を含む。放射線源は、後述の下記の機能の内の一つ以上のために使用されてもよい。記録域の照射;マーキング要素の照射である。任意にさらに、コンテナステーションは、それぞれが一つの容器のための、複数の保持位置を含み、問題の容器は、認識性を向上させた、少なくとも一つの容器部分を持ち、かつ、放射線源は、記録域を照射するのに好適であり、記録域は、認識性を向上させた特定の容器部分と連結する。さらに、放射線センサーは、任意に、記録域から到来する放射線の強度を測定するのに好適であり;かつ、評価ユニットは、測定強度と定められた閾値との間の比較を実行することによって容器の有無を記録するように装備される。
【0138】
容器は、任意に、ピペットチップである。問題の容器の性質は、例えば、ピペットチップの収集容量、または、ピペットチップの試料、または、ピペットチップに含まれる試料であってもよい。光学センサーは、任意に、光センサーである。放射線源と共同では、光学センサーは、任意に、光センサーの部分である。放射線源は、任意に、マーキングのマーキング要素の照射に好適であり、装置は、マーキングを読み取るために、放射線源を介してマーキング要素を照射すること;センサーを介してマーキング要素から到来する放射線の強度を測定すること;および、測定強度を、その強度に対する任意の閾値と比較することが可能である。
【0139】
さらに、容器用のコンテナステーションにおいて生物試料受容用容器の性質を検出するための方法が提案される。方法は下記の工程を含む。容器の性質に関する情報を含む、コンテナステーションにおける第1マーキングが照射される;および、第1マーキングから到来する放射線の第1強度が測定される;容器のタイプが、測定された第1強度の関数として記録される。
【0140】
任意に、容器の性質に関する情報を含む、コンテナステーションの第2マーキングが照射される;および、第2マーキングから到来する放射線の第2強度が測定される;および容器の性質が、測定された第1および第2強度の関数として記録される。
【0141】
さらに、それぞれが、一つの生物試料用容器のための、複数の容器保持位置を持つ、遠心機の占拠をチェックするための方法が提案される。方法は下記の工程を含む。容器保持位置について、その中に容器が存在するかどうかが記録される;容器保持位置において存在と記録された容器の全数が保存される;容器保持位置において存在と記録された容器の全数に応じて、容器保持位置における容器の分布について少なくとも一つの条件が決められる;容器保持位置において存在と記録された容器の分布が、該条件を満たすかどうかについてチェックが行われる。同じ容器について、サンプル容器位置が、攪拌器および/またはヒーターにおいて任意に配置される。
【0142】
さらに、複数の容器ホールダーを持つ遠心機の占拠をチェックするための方法が提案される。容器ホールダーは、それぞれ、生物試料のための少なくとも一つの容器のための、少なくとも一つの容器保持位置と連結する。各容器ホールダーについて、空席状態は、連結容器保持位置に容器が存在しないことと定められ、満席状態は、連結容器保持位置に少なくとも一つの容器が存在することと定められる。方法は下記の工程を含む。容積ホールダーについて、それらが空席か、満席かが記録される;満席容器ホールダーの分布および全数が保存される;保存される全数に応じて、満席容器ホールダーの適正分布のために少なくとも一つの条件が決められる;かつ、保存された満席容器ホールダーの分布が、条件を満たすかどうかについてチェックが行われる。任意にさらに、容器保持位置に存在する容器の全数も保存される。
【0143】
上記方法において、容器保持位置は、任意に、遠心ローターと共時回転することが可能である。
【0144】
前記方法において、センサーは、任意に、容器保持位置の中に容器が存在するかどうかを記録し;かつ、方法は、その上に、センサーを介して、サンプル容器位置におけるサンプル容器の数を記録する工程を含む。方法は、任意にさらに、サンプル容器の数が、存在すると記録された容器の全数と適合するかどうか、すなわち、二つの数字が一致すること、または、サンプル容器の数が、数組の容器保持位置の数に対応することをチェックする工程を含む。
【0145】
さらに、方法は、任意に、一サンプル容器に対し一容器保持位置を割り当てる関連づけを確立する工程を含む。この場合、関連づけは、任意に、各サンプル容器に、容器が存在すると記録された容器保持位置を割り当てるか、または、その中の少なくとも一つの容器保持位置において容器が存在すると記録された、一群の容器保持位置をサンプルに割り当てる。関連づけは、典型的には、容器保持位置に関連づけられたサンプル容器位置に、サンプル容器を運ぶようにとの指示を発することによって確立される。サンプル容器位置は、任意に、一般的表示を介して、容器保持位置に割り当てられる。サンプル容器位置は、サンプル容器ステーション中のサンプル容器位置の配置は、遠心機中の容器保持位置の配置に対応するという事実によって、容器保持位置に割り当てられる。関連づけは、任意に、各容器保持位置を、サンプル容器のサンプル容器位置に割り当てる表を産生することによって確立される。
【0146】
さらに、サンプル処理用装置の占拠をチェックするための方法が提案される。方法は下記の工程を含む。処理されるサンプルによって調製されたサンプル容器の数が記録される;調製されたサンプル容器の数に応じて、該サンプルを処理するための消耗試料の必要数および/または量が決められる;装置中に存在する消耗試料の数および/量が決められる;および、装置中に存在する消耗試料の数および/または量が、必要とされる消耗試料の数および/または量と比較される。
【0147】
任意に、容器保持位置は、遠心ローターと共時回転が可能である。任意に、消耗試料の必要数および/または量は、プロトコールに従って決められる。任意に、消耗試料は、容器、特にピペットチップ、フィルター容器、例えば、スピンチューブ、および収集容器、例えば、いわゆるエッペンドルフチューブを含むリストから選ばれる。任意に、消耗試料は、さらに、生物物質、例えば、生物流体、酵素、および/またはバッファー液を含む。任意に、消耗試料の現実状態から、ユーザーに対する参照が、所望の状態の産生のために生成される。
【0148】
さらに、複数の容器ホールダー、または液体を処理するためのデバイスを保持するためのローターを持つ遠心機が提案される。各容器ホールダーは、遠心時、すなわち、ローター軸周囲におけるローターの回転時、第1容器を保持することが可能である。さらに、遠心機は、各容器ホールダーから第1容器を排除することが可能な取り扱いユニットを含む。特に、これを、容器ホールダーが遠心機内にある間に実行することが可能である。その上、取り扱いユニットは、容器ホールダーの中に保持される第2容器に、第1容器を接続すること、または、第2容器の中に少なくとも部分的に第1容器を挿入することが可能である。任意に、グリッパーは、xおよびy方向に動かすこと、ピペットユニットと共にxおよびy方向に運動を実行すること、および/または、z方向に動かすことが可能である。z方向の運動は、一般に、ピペットユニットとは独立する。グリッパーは回転することが可能であり、容器ホールダー中の容器を再配置することが可能である。この再配置は、一般に、グリッパーを回転することを含む。
【0149】
さらに、遠心ユニットにおいて生物試料を処理するための方法が提案される。遠心ユニットは、回転可能な遠心ローターを有する遠心機、遠心ローターの中に配置される容器ホールダー、および生物試料受容用容器が保持される第1保持位置、およびグリッパーを有するグリッパーユニットを含む。方法は下記の工程を含む。第1保持位置から容器を排除すること;第1保持位置にアクセスするためにグリッパーを位置決めすること;グリッパーを介して容器を把捉すること;および、容器が、グリッパーによって容器ホールダーから排除されるようにグリッパーを動かすこと、である。
【0150】
方法は、任意に、回転位置を位置決めすること、または、遠心ローターの回転運動を阻止することから成る追加工程を含む。任意に、容器ホールダーは、遠心ローターに回旋的に登載され、方法は、遠心ローターにおける容器ホールダーの回旋運動を阻止することから成る追加工程を含む。
【0151】
記載の先行部分および後続部分は、生物処理用装置において使用することが可能な個々の要素、および方法を記載する。図示の個々の要素および方法の記載は、別様に特に言明しない限り、生物試料処理用装置とは基本的に独立する。したがって、記載される個々の要素および方法は、本明細書の装置において示されるものとは異なるやり方で組み合わせることが可能であり、または、該装置とは、互いに独立に異なるやり方で使用されてもよい。
【実施例】
【0152】
個々の局面の記載
システム全体の部分の概観
図1aは、本発明の実施態様の作業プラットフォーム2の平面図を示す。生物試料処理用手順工程を実行するのに有用な、いくつかのモジュールが示される。図1aには下記のモジュールが示される。
−生物試料を遠心するための遠心ユニット200(図3aから5を参照);
−不用物、例えば、使用済みピペットの先端などのための廃棄物ステーション740;
−生物試料用手順を実行するための各種消耗試料用の消耗品ステーション700(図12参照);消耗品ステーションは、何よりも先ず、手順工程を実行するためのバッファー液体を有するコンテナを保持するためのコンテナ・ステーション710を含む。消耗試料用の消耗品ステーション700はさらに、ピペットユニットを介してピペット先端を受容するためのピペット先端ステーション720、および手順工程を実行するための他の流体用の他のコンテナを含む。
−生物試料および/または他の液体を加熱および/または攪拌するためのヒーター/攪拌器600(図13および14参照)。ヒーター/攪拌器は、例えば、分解工程を実行するために使用することが可能である。
−ユーザー案内および他の情報の入力および出力のために使用されるディスプレイ910。
【0153】
図示の個々の要素は、できる限りモジュールとして配置される。これらの要素は、作業プラットフォームに個々に登載され、排除されるが、挿入可能であることが好ましい。例えば、電流補給、または個々のモジュールの調節のための、追加の接続は、プラグイン接続を介して与えられる。個々のモジュールの交換を容易にするために、モジュールは、作業プラットフォームに示したその断面とほぼ一致する空間を、作業プラットフォームの下に占めていて、そのために、垂直に押し込むことが可能となっていることが好ましい。しかしながら、さらに、空間の理由で、個々のモジュールが、作業プラットフォームの下に、作業プラットフォームに示したその断面よりも大なり小なり近似のスペースを占めることは有利である。
【0154】
作業プラットフォームのモジュラー構築は、個々のモジュールの配置において異なる、別の実施態様を示唆する。このようにして、特別の空間要求を考慮することが可能である。さらに、図1aに示すように、個々のモジュールが省略される別の実施態様が可能である。したがって、例えば、分解工程を実行する必要がない場合には、そのような工程を実行するためのヒーター/攪拌器600が省略される実施態様が可能である。同様に、他の処理工程を実行するための別モジュール、または、既に支援される処理工程をさらによく実行するための別モジュールを付加してもよい。他のモジュールの例は、UVランプ;ヒーター/攪拌器の積極的冷却;消耗試料、例えば、容器ホールダー、容器、バッファー液、およびその他の処理流体を自動的に負荷するための装置;処理流体を分析するための分析モジュール;消費された消耗試料の処分用装置;およびその他のモジュールを含む。
【0155】
生物試料処理用装置の作業プラットフォームの、もう一つの平面図が、図1cに示される。図1aとは対照的に、図1cに示す平面図では、遠心機200の遠心蓋240は、図説のために排除される。これは、その中に配置された遠心ローター212および容器ホールダー120が見えるようになることを意味する。さらに、遠心蓋の冷却システムの空気流入口253および空気流出チャンネル255を見ることができる。さらに、遠心蓋を開閉するための機構260、および、遠心蓋を閉鎖位置に固定するための要素268を見ることができる。これらの要素を、図3bおよび5を参照しながらさらに詳細に説明する。
【0156】
さらに、グリッパーユニット400、ピペットユニット500、および、グリッパーおよびピペットユニットを動かすためのキャリッジシステム300が示される。
【0157】
キャリッジシステム300(図6も参照されたい)は、装置に、例えば、装置の背面壁に固定的に付着されるX−レール312(すなわち、その方向が、座標系のX方向を定義するレール)、およびY−レール314を含む。Y−レールの一端は、スライド要素318によって、X−レールに登載されるが、その登載は、X−レール312においてスライド要素318をX方向に滑走させることによってY−レールが移動されるように行われる。Y−レールは、スライド要素によって水平位置に保持される。これは図面には示されないが、別法として、Y−レールの他端に、作業プラットフォーム2に付着させた第2X−レールにそって滑走可能な、第2スライド要素を与え、それによって、Y−レールが、その両端のそれぞれにおいてスライド要素によって保持されるようにすることも可能である。
【0158】
キャリッジ部材320は、Y−レールにそってY方向に動かすことが可能であり、このキャリッジ部材320は、グリッパーユニット400およびピペットユニット500を含む。グリッパーユニットおよびピペットユニットは、それぞれ独立に、キャリッジ部材320にそってz方向(すなわち、垂直方向、すなわち、図1cに描く平面に対して垂直に)に動かすことが可能である。このようにして、グリッパーユニット400およびピペットユニット500は、全ての方向に動かすことが可能であり、方向zへの動きは独立的である。
【0159】
順次行う手順の複雑性およびモジュールの配置に応じて、グリッパーおよびピペットユニットの別態様が可能である。例えば、グリッパーユニット400およびピペットユニット500が一方向(例えば、方向z)のみに動かすことが可能である実施態様、あるいは、二方向(例えば、方向xおよび方向z)に動かすことが可能な実施多様も可能である。この場合、例えば、Y−レール314を省略することが可能であり、キャリッジ部材320は、固定レールに直接付着させることが可能となると考えられる。さらに、二つのレールの一方、または、両レールを、例えば、キャリッジ部材320が付着されるピボットアームを介して曲線運動を産生するように、例えば、一つ以上の要素と交換することも可能であると考えられる。さらに、グリッパーまたはピペットユニットも、それらが所望の手順工程を実行するのに必要でない場合は、省略することも可能である。
【0160】
筐体、カバー
図2aは、本発明による装置を斜視図において示す。装置は、筐体4の中に配置される。装置はさらに、筐体の前側にカバーを含む。カバーは、図2aでは閉鎖される。筐体4は、例えば金属、または、プラスチック、または他の、ある頑丈な試料から製造されてもよい。カバー10は、手動でそれを開放するためのハンドル12を持つ。カバー10は、装置の内部が、動作時、光学的に監視することが可能となるように透明に構築される。
【0161】
カバー10および筐体4を防音性構築とすると有利である。このために、筐体4に、音吸収性内張りを与えてもよい。さらに、筐体の振動性部分も、防音的に強靭に懸垂させてもよい。シールがカバー10に設けられてもよい。その外、図2aは、ディスプレイ910を示す。さらに、消耗試料用の廃棄物コンテナ750の引き出し要素が示される。引き出し要素は、ハンドル752を介して装置の前側から引き出すことが可能である。さらに加えて、ラウドスピーカ用のラウドスピーカ開口902、およびオン/オフスイッチ6が示される。廃棄物コンテナの使用は、下記にさらに詳細に記載される。
【0162】
図2bは、カバー10を排除した場合の図2aの装置を示す。そのために、筐体4の内側に、図1aおよび1cに示す作業プラットフォーム2が、遠心蓋240、ヒーター/攪拌器600、フォーク型光遮蔽器852、コンテナステーション710、およびY−レール314を持つ状態を見ることができる。ホールダー14は、上方に回旋運動され、それによってカバーが手動で上方に開放可能とされる。
【0163】
遠心機および他の成分は一体化されて、装置のプラットフォームに納められ、そのため、安定性を実現し、かつ、振動および隣接モジュールの影響をほぼ抑圧することが可能である。
【0164】
遠心機
図3aは、遠心機200の斜視図を示す。この図において、遠心蓋240は閉鎖され、そのため遠心機のローター212は見ることができない。遠心蓋240は、蓋カウリング244を含む。蓋240の他の部分が、図3cと組み合わせて記載される。図3aに、遠心ローターを囲む、遠心機コンテナ220が示される。遠心機コンテナは、遠心ローターを、環境から空気力学的に遮蔽し、雑音を低減し、高いローター速度において部分が脱離した際の安全策として役立つ。さらに、見ることができるものは、非同期型電気モーターの形状を取る遠心ドライブ218である。さらに、他のドライブ形態、例えば、ベルトまたはチェーンを用いるドライブも可能である。図示のドライブは、約0−15,000rpmの速度のために設計される。
【0165】
図3bでは、遠心機200が、遠心蓋240が開放した状態で示される。ここには、遠心スピンドル214の周囲に回転可能な遠心ローター212が示される。さらに、遠心軸214の周囲に、遠心ローター212と共に回転可能なシールド、またはローターディッシュ216が示される。遠心ローター212は、容器ホールダー120を懸垂するための手段を含む。この種の容器ホールダー120が図11に示される。原理的には、この目的のために与えられる位置のいくつかは、容器ホールダーによって占拠されてもよいが、ただしその際、容器ホールダーが遠心ローターの周囲に均一に分布されて、不均衡が全く無いことが確保されるよう注意を払うことが好ましい。それに加えて、遠心ローター212と共に回転しない遠心コンテナの内壁222が示される。遠心蓋240の開閉のために、ドライブ(図示せず)によって駆動される伝達ロッド262が示される。さらに、対応する交合部分268の中に貫入され、ロック機構269を介して保持され、そのため、蓋が閉鎖された場合、その閉鎖位置にしっかりと保持される、蓋の閉鎖部材267が示される。さらに、遠心蓋240が閉鎖された場合、遠心コンテナ220の内部を少なくとも部分的に密閉する、遠心蓋のためのシール228が示される。生物サンプルを処理する場合、遠心機内の温度が、指定の温度範囲内に維持可能である場合、より良い結果が得られる可能性が高い。特に、遠心時に産生される摩擦熱が完全に最小化されるか、または外部に放出された場合、結果を改善することが可能である。
【0166】
図3a、3b、および3cに示す遠心機は、これらの要求を部分的に満たす冷却システムを備える。図示の冷却システムによって、遠心機から熱を放出することが可能になる。さらに、図示の冷却システムによって、遠心機内部の空気流が有利な影響を受けることが可能になる。
【0167】
遠心機冷却システムの一つの要素は、遠心コンテナ220の外部冷却器230である。外部冷却器230は図3aに示される。外部冷却器は、熱を、遠心コンテナ220またはその外壁から周辺大気へ効率的に放散させることを可能とする、冷却リブ232を含む。さらに、図示の冷却リブ232とは別の形の冷却表面を考えることも可能である。さらに、例えば、他の何らかのやり方で構築される冷却リブ、特に熱伝導性の高い試料から成るコーティング、または、周辺大気に熱を効率的に放散させる、他の何かの表面も可能である。図示の実施態様とは独立に、50W/(m2K)を超える熱移送係数を持つ表面または配置が好ましいが、一方、100W/(m2K)を超える熱移送係数が特に好ましく、かつ、150W/(m2K)を超える熱移送係数を持つものがもっとも好ましい。
【0168】
その上にさらに、図示の換気装置234が、遠心コンテナ220を外部的に冷却するのに役立つ。この装置は、遠心コンテナの外壁の上に風を吹く。さらに、これも、外気への、熱のより効率的な放出をもたらす。しかしながら、さらに、換気装置234も省略してもよいし、あるいは、他の何かのデバイス、例えば、別の冷却ガス、例えば、窒素、あるいは、液体冷却剤(例えば、水冷却)による噴射用デバイスによって置換することも可能と考えられる。
【0169】
空気流を外方に向けるために、遠心機204の底部には穴205が与えられる。さらに、遠心機が装置1の一隅に配置される場合、あるいは、ホースなどの側面空気出力口が与えられる場合、側面空気排除スロットも可能である。図示の実施態様では、換気装置234は、冷却リブ232またはコンテナ壁222ばかりでなく、同時に、遠心ローター212のドライブ218に対しても、冷却ガスを噴射することが可能であるという利点を有する。
【0170】
図3aから3cに示す遠心冷却法は、空気、または他の全ての冷却剤が、遠心コンテナの内側に入ることを回避する。さらに、シール228、229、および保護リング215a、およびコンテナ壁222の性質は、冷却ガスの浸透の阻止を助ける。図示の実施態様とは独立に、冷却ガスが、遠心コンテナ220の内部の上を流れない場合は好都合である。言い換えると、空気、または別の冷却ガスは、遠心コンテナの内部に入らない、すなわち、遠心コンテナの内部は、冷却ガス、または冷却ガス流から遮蔽される。
【0171】
遠心機を冷却するための、または、冷却器の内部から熱を放出するための、もう一つのデバイスは、遠心蓋240を冷却するための蓋冷却システム250である。遠心蓋240を冷却することは、、遠心機内部で加熱された空気が上昇し、したがって蓋に向かって動く傾向を持つという利点を有する。その結果、熱は、蓋を通じて特に効率的に排除することが可能になる。遠心蓋240用冷却デバイス250については各種実施態様を考えることが可能である。
【0172】
そのような一つの実施態様が、図3aから図3cに示される。この実施態様は、遠心蓋240を冷却するために、周辺空気を取り込んで、これを、遠心蓋240に向かって吹きつける換気装置251を含む。空気は、空気流入チャンネル252を通じて遠心蓋240に導かれる。空気は、蓋240への空気流入部253および対応する空気流入口258を含む導入装置を介して遠心蓋に導入される。空気は、遠心蓋240の内部を通過、または吹きぬけ、そうすることによって、遠心蓋から熱を吸収し、それを再び運び去る。このようにして、空気は、遠心蓋から熱を放出することが可能となる。空気は、空気流出口254を通じて放出される;蓋を通過した加熱空気は、空気流出口254を通じて蓋から脱出し、次に、空気流出チャンネル255を通じて装置の底部に導かれ、次いで装置から放出される。
【0173】
図3cは、蓋カウリング244が排除された状態(図3aおよび3bを参照)の遠心蓋240を示す。これは、遠心蓋の蓋基部242が、気流のチャンネル257を定める冷却リブ256を有することを示す。冷却リブ256および蓋の拡大表面は、遠心蓋240から、蓋を流通する空気に向かう、熱の効率的放出を確保する。コンテナ232の冷却リブと同様に、ここでも、蓋内部の表面の形状についてはいくつかの別態様を有することが可能である。
【0174】
さらに、蓋冷却の性質について異なる別態様も可能である。例えば、遠心蓋の蓋カウリング244は排除されても、および/または、換気装置251は省略されてもよい。後者の場合、遠心蓋は、周辺空気によって受動的に冷却される。さらに、冷却液、例えば、水などによって蓋を冷却することも可能である。この場合、屈曲性チューブを用いて、冷却液を、蓋表面へ補給し、かつ、該表面から排除し、そうすることによって、チューブがあるにも拘わらず全く困難なく蓋を開放、閉鎖することが可能となることは有利である。図示の実施態様とは独立に、50W/(m2K)を超える熱移送係数を持つ表面または配置が好ましく、100W/(m2K)を超える熱移送係数が特に好ましく、かつ、150W/(m2K)を超える熱移送係数の内の一つがもっとも好ましい。
【0175】
図3bは、遠心機のもう一つの成分としてローターディッシュまたはシールド216を示す。図4と接続してさらに正確に記載されるように、ローターディッシュ216は、遠心機のコンテナ内部の熱および気流の発達に影響を及ぼす(図4参照)。図示の実施態様とは独立に、ローターディッシュ216の遠心スピンドル214の外側には孔、またはその他の開口は与えられない。
【0176】
それに加えて図3bには、遠心機のローター212が示される。ローター12は、容器ホールダー120を受容するための12個の受容位置を持つ。受容位置には番号が付せられる。番号「1」によってマークされる第1受容位置は、さらに任意に、簡単に認識可能なマーキング、例えば、着色マーキング(図示せず)によってマークされてもよい。ローターは、容器ホールダー120用の懸垂手段110のためのホールダーを含む。容器ホールダー120を持つ懸垂手段110が該ホールダーから懸垂されると、懸垂手段110は、ローター212に対し、水平軸の周囲に回旋可能とされる。図3bは、例えば、懸垂手段110によってローター212中に懸垂され、水平回旋軸の周囲に外方に回旋される容器ホールダー120を示す。懸垂手段110は、容器ホールダー120と一体に形成されてもよいし、または、容器ホールダーとは別に形成されてもよい。後者の場合、容器ホールダー120は、懸垂手段110の中に挿入可能となるように設計されてもよい。好ましい実施態様では、容器ホールダーは、プラスチックで製造され、懸垂手段は、金属、例えば、アルミニウムで製造される。
【0177】
ローターはさらに、容器ホールダー120、またはその懸垂手段110の水平回旋軸の周囲における最大回旋位置のストップを表す。このストップは、最大回旋角度に達すると、ストップがローター212の一部に接触するという点で、容器の最大回旋角度を定める。最大回旋角度は、回旋の外向き方向、すなわち、ローター212がその軸214の周囲に回転する時に生成される遠心力によって産生される回旋運動の方向にあることが好ましい。
【0178】
異なる懸垂手段110、または、懸垂手段110に容器ホールダー120を登載するための異なる方法を使用することによって、例えば、懸垂手段110において異なる濃度の容器ホールダー120を使用することによって、異なる最大回旋角度について異なるストップを定義することが可能である。例えば、90°、60°、45°、30°、および15°の回旋角度をサポートすることが可能である。
【0179】
それに加えて、容器ホールダー120の内向き方向の回旋運動にたいしてもストップを与えることが可能である。両ストップとも、遠心ローター212に登載してもよいし、または、遠心機200の、他の、ある部分に登載してもよい。ストップおよび遠心ローター212に関する、さらに詳細な記載が、特許出願EP05020948.5の39ページ11行から43ページ6行、図17および18、および特許請求項61から68に見られる。なお、上記セクションを、引用により、本出願の記載の中に含める。
【0180】
図4は、ローター軸214を含む断面にそって遠心ローターを切断する、側方断面を示す。回転軸214の周囲に回転可能に登載されるものは、モーターシャフト215、ローターウィール212、その上に登載される容器ホールダー120、およびローターディッシュ216である。モーター218は、その回転軸の周囲にモーターを駆動する働きをする。ローター軸の周囲に回転可能ではない、図示の要素は、遠心コンテナ220のコンテナ壁222、コンテナ壁を担持するコンテナキャリヤ226、モーター218の固定部分、および、モーター218の外壁と、コンテナ壁222の間のシール要素229の外、コンテナ壁222および遠心機の蓋の間の隙間を密封するためのシールリング228(図4には図示せず)を含む。それに加えて、モーターシャフト215の出力の保護リング215aは、モーター218の内部、および、遠心コンテナ220の内部を互いに遮蔽する働きをする。
【0181】
モーターシャフト215の出力、ローターウィール212、およびローターディッシュ216は、互いに接続される。ローターウィール212は、ユーザーによって交換することが可能である。このために、ローターウィールは、モーターシャフト215の出力のネジ要素を介してモーターシャフトの出力にネジ留めされ(モーターシャフト215の出力の最上要素)、さらに、回転運動を伝達するためのピンによってモーターシャフトの出力に接続される。ローターウィール212の中に、ピンを登載するための陥凹212aが与えられる。陥凹212aが絶対に不均衡を生じることがないように、さらに等化貫通孔212bが与えられる。
【0182】
さらに、図4の断面は容器ホールダー120も示す。この容器ホールダーは、図10においてさらに詳細に示される。容器ホールダーは、懸垂手段110、例えば、アルミニウム懸垂手段の中に挿入される。
【0183】
図5に示すように、懸垂手段110は、遠心ローター212において懸垂させることが可能である。このために、懸垂手段110は、この目的のために与えられる遠心ローター212の懸垂要素112bの中に懸垂手段を挿入するのに好適な軸部分112aを含む。懸垂手段110が遠心ローター212の中に懸垂されると、懸垂手段、およびその中に挿入された容器ホールダー120は、水平スピンドル113の周囲に回旋することが可能である。
【0184】
図4は、水平回旋軸に対し安静位置にある容器ホールダーを示す。遠心時に出現する遠心力によって、容器ホールダーは外向きに回旋される、すなわち、容器ホールダーの下方部分が、遠心軸214から遠ざかるように動く。図5に示すように、外向きの回旋運動を制限するためにストップが与えられる。このストップは、図5cに示すように、最大回旋αsが達せられると遠心ローターの交合辺縁114bと接触する、懸垂手段の辺縁114aによって形成される。ストップの他の詳細は、EP特許出願05020948.5の42ページ7行から43ページ6行に記載される。なお、上記セクションを引用により本出願の記載の中に含める。
【0185】
容器ホールダーは、安静位置に対して内向きに回旋することはできない。これは、ストップ212m(図4参照)、および/または遠心ローター212のストップ116bが、それぞれ、図4および5に示すように、懸垂手段110の対応する交合ストップ110mまたは116aと接触するという事実によって阻止される。
【0186】
生物試料を遠心する場合、容器ホールダー120の中に含まれる生物試料用容器は、閉鎖された蓋を持つ必要はない。実際、容器は、蓋をまったく持たなくともよいし、または、蓋は開放されていてもよい。例えば、図4に示す容器は、容器ホールダー120の蓋ガレージの中に保持される開放蓋を持つ。
【0187】
図3bおよび4に示す遠心ディッシュ216は、遠心スピンドル214に向かって内向きに延びる底部域を持つ。さらに、底部域は、内向きに曲線を描く外方辺縁域を持つ。この曲線は、遠心ディッシュ216の外方辺縁が、容器ホールダー120が遠心ローター212内に静止している時、容器ホールダーの下端および上端の間に配される高さにあることを意味する。
【0188】
さらに、遠心ディッシュ216は、内部、すなわち、ほぼその外縁の高さに延びる領域を定める。同時に、遠心ディッシュ216の外面および底面、すなわち、遠心コンテナ220に向かう側面は、比較的滑らかで、そのため、回転時の空気摩擦が最小となるように面を定める。しかしながら、遠心ディッシュ216は、遠心コンテナ220の上縁までは延びないので、それを介して、熱が、遠心コンテナの外壁222に向けて放出することが可能とされる、遠心コンテナ220の壁による空気交換が同時に可能である。これによって、より効率的な冷却が可能となる。
【0189】
図10は、容器160を保持するための容器ホールダー120を示す(図11b参照)。この容器ホールダーは、容器のために、三つの保持位置130、140、150を持つ。この保持位置は、同じ容器に与えられても、または、異なる容器に与えられてもよい。例えば、図10に示す容器ホールダーでは、保持位置140が、保持位置130および150の直径よりも大きな直径を有する容器のために与えられる。
【0190】
さらに、容器ホールダーは、液体を保持する働きをする容積122を有する。保持位置130、140、150は、液体を容積122に排出するための開口を含んでも、含まなくともよい。再び図11aを参照すると、保持位置130および140は、液体が、保持位置130に保持される容器の底部開口を通じて排出されて、容積122に進入することを可能とする開口を含む。しかしながら、保持位置150では、保持される容器を脱出する液体は、この保持位置が、固相の密閉壁によって囲まれているので、容積122に入ることができない。したがって、保持位置150そのものが容器としても作用することが可能である。
【0191】
図11aからdに示すように、容器ホールダー120の保持位置140の直径A2は、保持位置130および150の直径A3=A1よりも大きい。その結果、外径A2を有する保持位置140の中に、この保持位置への挿入を可能とする外径を有し、かつ、他の二つの保持位置の直径A3=A1に対応する内径を有する、第1容器170を挿入することが可能である。したがって、保持位置130および150が与えられる容器160は、この容器170の中に挿入することが可能である。
【0192】
特に、この配置によって、容器160は、グリッパー、例えば、グリッパー400を介して、保持位置130から、保持位置140に保持される容器170の中に移送することが可能である。容器を移送するための類似の方法が、EP特許出願05020948.5のページ28、26行からページ31、8行に記載される。この部分を、引用により本出願の記載の中に含める。これらの方法は、グリッパー410(図9参照)、または同様のグリッパーを用いて実行してよい。
【0193】
容器ホールダー120によって保持される容器は、蓋を持ってもよい。そのような蓋166付き容器160が、例えば、図9に示される。図10に示すように、容器ホールダー120の蓋のために蓋ガレージ132、142、144が利用可能である。これらの蓋ガレージは、遠心時、蓋を、確定位置に固定するように構築される。蓋ガレージは、蓋ホールダー414による蓋166へのアクセスを可能とするように構築される(図9参照)。このために、蓋ガレージは、蓋ホールダー414が、それを介して蓋に接触可能とされる、開口133、143、145を含み、かつ、蓋のためのストップを含む。このため、容器ホールダー120から容器を排除する際、または、容器ホールダーの中に容器を挿入する際、蓋ホールダー414によって定められる位置を保持しながら、蓋をガレージから排除すること、または蓋をガレージの中に設置することが可能になる。
【0194】
保持位置140については、図11dに示すように、共に挿入される、二つの容器160、170のそれぞれの蓋に与えられる、二つの蓋ガレージ142、144が利用可能である。
【0195】
さらに、容器ホールダーは、ホールダー位置130、140を安定化するために働くサポート支柱136、146を有する。安定化をさらに強化するために、これらの保持位置は、容器ホールダー120の外壁に接続される。したがって、保持位置は、遠心時に出現する力に対抗して安定的に保持することが可能である。
【0196】
さらに、容器ホールダーは、位置決め開放要素、または位置決めカウンター要素124を持つ。この位置決めカウンター要素124は、図8に示すように、位置決め装置450の位置決めスパイクまたは位置決め要素452と嵌合する形状を有する。図8を参照しながら記載されるように、この嵌合によって、角度位置を固定または位置決めすることが可能である。嵌合はさらに、遠心機中の容器ホールダーの変位角を位置決めまたは固定することが可能である。位置決めカウンター要素124は、位置決め要素を受容するための腔を含む。
【0197】
位置決めカウンター要素124および位置決め要素450の間の嵌合は、位置決めカウンター要素124と位置決め要素450の間の、平面、すなわち、水平面方向における相対的動きを阻止するのに好適である。
【0198】
位置決めカウンター要素および、容器ホールダーの中央間の距離は、位置決めカウンター要素と容器ホールダーの辺縁間の距離よりも大きい。容器ホールダーの中央は、一般に、図5cに示す回旋軸113によって定められる。腔は、下方に向かって先細る、すなわち、腔の断面は、腔の内部に向かう方向にそって減少する。腔の辺縁の二つの対向点の隔たりは、深度、すなわち、位置決め要素を、腔に導入することが可能な移動深度よりも小さい。
【0199】
容器ホールダー120に関する、さらに別の局面が、EP特許出願05020948.5に記載される。なお、この出願を、引用により本出願の記載に含める。
【0200】
不均衡を完全に回避する、または最小化するためには、遠心機をなるべく均等に負荷することが有利である。このために、遠心機は、該遠心機がなるべく均等に負荷されることを確保するための手段を含む。この手段は、遠心ローター212が完全に占拠されない場合でも、ほぼ均一な負荷を実現する定規を含む。
【0201】
一実施態様では、定規は、遠心ローター212の自動的負荷のために使用されてもよい。別の実施態様では、定規は、手動負荷をチェックするために使用されてもよい。この場合、負荷が、定規と一致しない場合、または不均衡で十分に満足すべき分布を持たない時は、警告、またはエラーメッセージが発信されてもよい。同時に、負荷改善に関する指示が示されてもよい。
【0202】
定規は、例えば、遠心機が負荷される容器の重心が、ローター軸214と一致することを要求してもよい。このために、各容器は、その方向が、該容器が遠心ローターにおいて配置される、ローター軸214の周囲の角度に対応する、ベクトルと関連づけられてもよい。次いで、定規は、これらのベクトルの合計が、ゼロである、または、任意の閾値未満であることを要求してもよい。容器が様々の重さを持つ場合、ベクトル長は、容器の重量に比例する。
【0203】
自動的負荷に関しては、他の定規が与えられてもよい。例えば、B個の容器ホールダーによる、または複数の容器による、P個の位置の自動負荷のための定規が、均一分布を要求してもよい。もしもPがBで割り切れる場合は、遠心ローターの、正確に各(P/B)番目の位置が占拠される。もしもPがBで割り切れず、かつ、B′が、Bに比べて次に大きいPの除数である場合、さらに、(B′−B)個の空の容器または容器ホールダーに負荷し、B′個の容器が均一に分布されるようにしてもよい。
【0204】
その上に、ドライブの調節によって、遠心機のドライブ218の一部である加速センサーのデータから不均衡の検出が可能とされてもよい。この場合、エラーメッセージが生成され、その不均衡、または不均衡の時間平均が、任意の閾値を超過した場合、遠心操作が停止されてもよい。
【0205】
試料が遠心機に負荷され、または、遠心機から脱負荷され、または遠心機に移送されること、または、遠心機の試料の処理または分析のために工程を実行することが目論まれる場合、遠心機のローターの位置決めが可能とされ、および/または、その位置が検出可能とされると有利である。ローターの位置は、共時回転が不可能な参照角度に対する、遠心ローター上の一位置(例えば、遠心ローター212と共に共時回転することが可能な定められた要素、例えば、容器、容器用の保持位置、またはマーキング)の回転角度である。位置決めとは、位置の認識であるか、または、その位置への移動、またはその位置における保持または固定である。
【0206】
遠心ローターの調節部を、該ローターの位置決めのために使用することが可能である。所望の位置が調節部の中に存在する場合、調節部は、その位置への到達、および、任意に、ある一定の正確度で保持することを確保する。このようにして、例えば、個々の処理工程のために必要な容器ホールダーまたは容器は、適切な処理手段、ピペットユニット、またはグリッパー、または分析装置が考えられるが、そのような手段と相互作用を持つための位置に移動させられる。
【0207】
遠心機のドライブ218は、非同期モーターであってもよい。これは、通常、非同期モーターは、頑丈で、構築が安価で、高速で安定で、かつ、動作が滑らかであるという利点を持つ。しかしながら、サーボモーターと比べると、非同期モーターは、位置決めのために必要な調節データが直ぐには入手できないために、位置決めが難しいという欠点を有する。
【0208】
しかしながら、非同期モーターは、ベクトル調節と適合させることが可能である。ベクトル調節は、従来技術において、例えば、A.Fitzgeraldら、題名「電気機械(”Electric Machinary”)」(McGraw−Hill, 2003)による公刊物において記載される。ベクトル調節は、サーボモーターの調節に匹敵する、非同期モーターの調節能を与える。このようにして、高速における有利な振る舞い、および遠心ローターの位置決めの両方を実現することが可能である。
【0209】
それゆえ、記載される実施態様とは独立に、生物試料用の遠心機、好ましくは、遠心機ローターのドライブとしてベクトル調節付き非同期モーターを有する、実験用遠心機の提供が提案される。さらに、この非同期モーターは、ローターの回転軸の周囲の任意の回転角度においてローターを位置決めするための手段を装備する。好ましくは、この手段は、ローターの回転角度を決めるためのセンサーを含む。
【0210】
さらに、速度フィードバックを備える非同期モーターを介して位置決めを調製することも可能である。改良型U/f−特徴調節を備えた方法が提案される。この方法では、実際の電流値が検出され、速度調製器に供給される。次に、位置決めが、活性的S字状電流によって調整される。
【0211】
スパイクによる遠心機の機械的位置決め
その外に、位置決めは、遠心ローターと共時回転はしないが、遠心ローターと共時回転可能な、少なくとも一つの位置決めカウンター要素と相互作用を持つのに好適な位置決め要素を用いて実行することが可能である。この相互作用は、例えば、機械的嵌合、磁気的相互作用、またはマーキングの読み取りであってもよい。相互作用のためには、第1工程において、例えば、遠心ローターの調節によって、位置決めカウンター要素と、位置決め要素とが、互いに相互作用を持つ範囲内にあるように、荒い位置決めが既に実行されていると有利である。さらに、複数の位置決めカウンター要素を与えることも有利である。例えば、遠心ローターが位置決めされる全ての位置に対し、対応的に配置される位置決めカウンター要素を与えると有利である。
【0212】
位置決め要素450および対応する位置決めカウンター要素124の例が、グリッパーの記載においてより詳細に記載される(図8参照)。当業者であれば、本出願において同様に記載される、他の位置決め要素およびカウンター要素、特に、グリッパーユニットには付着されないが、例えば、遠心コンテナ222、または、装置1の作業プラットフォーム2に付着される要素についてどのように操作したらよいかを了知するであろう。
【0213】
グリッパーおよびピペットユニットのキャリッジ
図6は、グリッパーユニット400およびピペットユニット500を動かすためのキャリッジシステム300の斜視図を示す。このキャリッジシステム300は、固定的に登載されるX−レール312およびY−レール314を含む。Y−レール314は、スライド要素318を介してX−レールに接続される。このスライド要素318は、x方向にX−レールにそって滑走すること、したがって、Y−レール314をx方向に動かすことが可能である。
【0214】
Y−レール314をx方向に動かすために、ドライブ316およびドライブベルトが与えられる。このドライブベルトは、二つのローラーから懸垂される。ドライブは、これらのローラーの内の一方の回転を駆動することが可能である。回転は、ドライブベルトの進行運動に変換される。このために、ローラーおよびドライブベルトは、それらの間に嵌合が起こるような形状を持つこと、すなわち、ドライブベルトは歯付きベルトであることが好ましい。このドライブベルトは、固定手段を介してX−レールにしっかりと接続される。固定手段は、ドライブベルトの進行運動が、X−レールにそった、すなわち、x方向へのY−レールの運動が確かに起動されるようにする。
【0215】
さらに、キャリッジシステム300は、キャリッジ部材320を含む(図1c参照)。このキャリッジ部材320は、Y−レールにそってy方向に動くことが可能である。このために、キャリッジ部材は、Y−レール314にそって滑走することが可能なスライド要素328(図1c参照)に接続され、したがってスライド要素は、キャリッジ部材をy方向に動かすことが可能である。この運動を駆動するためにドライブ326が与えられる。スライド要素328およびドライブ326は、Y−レールをx方向に駆動するドライブ316と同様に構築される。ドライブ326は、Y−レールに接続されるが、キャリッジ部材320とは共に動かない。ドライブ316および326は、ステッピングモーターの形状を取り、そのため、xy方向におけるキャリッジ部材320の正確な位置決めが可能である。ステッピングモーターの調節は、図16を参照しながらより正確に記載される。平坦帯状ケーブル309が、キャリッジシステム300を調節ユニットに接続する。これは、図16に示す、インターフェイス871aおよび871bの間の接続ケーブルに対応する。
【0216】
キャリッジ部材320は、グリッパー400のための懸垂手段340を持つ。この懸垂手段は、z方向におけるグリッパー400の動きを可能とする。このために、懸垂手段340は、それにそってグリッパー400がz方向に動くことが可能となる、グリッパーレール345を含む(図8参照)。それに加えて、ドライブ348がこの動きのために与えられ、Y−レール314のドライブベルトの駆動と同様に、リフトベルト342を駆動する。リフトベルト342は、二つのローラー346a、bの上を導かれ、ドライブを介して動くことが可能である。グリッパー400は、締め固定具443によってリフトベルト342に付着され、そのため、リフトベルトが進むにつれて、グリッパーはz方向に動く。
【0217】
それに加え、グリッパーキャリッジは、ピペットユニット500のための懸垂手段350を含む。この懸垂手段350は、グリッパー400用の懸垂手段340と同様に、z方向におけるピペットユニットの動きを可能とする。特に、懸垂手段350は、リフトベルト352、それにそってピペットユニットがz方向に動くことが可能となるレール355(図7参照)、その周囲にリフトベルトが導かれるローラー356a、b、および、z方向へのピペットユニットの挙上運動を駆動するためのリフトドライブ358を含む。これらの要素は、グリッパーユニット400の対応要素と近似する。
【0218】
上記構築のおかげで、グリッパーユニット400と、ピペットユニット500とは、水平面において、すなわち、xおよびy方向に共に動くことが可能となる。さらに、グリッパーユニット400とピペットユニット500とは、垂直方向、すなわち、z方向では互いに独立に動くことが可能である。
【0219】
Y−レール、およびキャリッジ部材のドライブ316、326、および、グリッパーユニットおよびピペットユニットのドライブ348、358は、ステッピングモーターとして構築される。駆動されるユニットが構成位置に達した時点を検出するために、ホームセンサー319(図1c参照)、329(図6参照)が(ドライブ348、358に対しても;図示せず)与えられる。ステッピングモーターおよびホームセンサーは、グリッパー(図8、9)に関して、かつ、図16に関連して与えられた、その記載と同様の構成を持つ。
【0220】
ピペットユニット
図7は、ピペットユニット500の斜視図を示す。ピペットユニットは、図6に関連して示すように、z方向にレール355にそって動くことが可能なピペット部材501を含む。このために、ピペット部材501は、z方向にレール355にそって滑走することが可能なキャリッジ、またはスライドまたはロール要素545、および、z方向へピペット部材501が運動するための懸垂手段350を含む。懸垂手段350は、リフトベルト352、ローラー356a、b、および、リフトベルト352を駆動するためのドライブ358を含む。リフトベルトは、付着手段543によってピペット部材501に付着される。ドライブ358は、Y−レールのドライブ316と同様に構築される。ドライブ358は、レール355にそうスライド要素545の運動、したがって、z方向におけるピペット本体501の運動を駆動することが可能である。
【0221】
ピペットユニット500は、ピペットチップ730のためのピペットチップホールダー520を含む。図7では、ピペットチップ730は、ピペットチップホールダー520に押し込まれている。ピペットチップは、脱離可能に装着される、すなわち、ピペットチップは、ピペットチップホールダー520から取り外すことも、または、その上に設置することも可能である。ピペットチップホールダーの構築に関するさらに詳細な記載が、欧州特許出願06010976.6に見られる。なお、この出願を、引用により本明細書に含める。この出願は、軸方向に延びる長軸を有する結合要素を備えた、ピペットチップ保持用装置を提案する。
【0222】
ピペットチップホールダー520の上にピストンチューブ518が登載される。ピペットチップホールダー520は、ピペットチップ730の内部と、ピストンチューブ518の内部との間で、ガスまたは圧の交換が可能となるように構築される。ピストンチューブ518とピペットチップ730の内部は、外部に対し密封され、そのため、内部と外部の間のガスの交換は、ピペットチップ730のピペット開口732を通じてのみ可能となるようになっている。外部に対するピストンチューブ518の減圧は、ピペットチップに伝達され、そのため、ガスまたは流体を、ピペット開口732を通じてピペットチップ730の内部に吸引することが可能となる。同様に、ピストンチューブ518における過剰圧では、ガスまたは液体が、ピペット開口732を通じてピペットチップ730の外部に強制的に排出させられる。
【0223】
減圧または過剰圧を生成するために、ピペットユニット500はピストンシステム510を含む。このピストンシステムは、ドライブ512、および、z方向にピストンレール515bにそって移動が可能なピストンキャリッジ515aを含む。ピストンシステムはさらに、ドライブ512の回転運動を、ピストンキャリッジ515aのリフト運動として伝達するための、伝達システム514を含む。伝達システム514は、ウォームギアとして構築される。ピストンシステムはさらに、固定具517によってピストンキャリッジ515aに付着されるピストン516を含む。したがって、ピストン516は、ピストンチューブ518の中に、該チューブを気密に封印するように配置される。
【0224】
ピストンシステムはさらに、ピストンキャリッジの、したがって、ピストンの較正位置を検出するためのホームセンサー513を含む。このホームセンサーは、後述のグリッパー(図9参照)のホームセンサー428と同様に構築される。好ましい実施態様では、リフト要素のドライブ512はステッピングモーターである。この実施態様では、較正された開放状態が検出可能とされる場合、ピストンの各挙上状態が、較正された開放状態から始まる、ステッピングモーターのステップをカウントすることによって検出可能とされる。ピストンの移動と、吸引または排出される流体の容量の間には一定の関係がある。
【0225】
ピストン516およびピストンチューブ518は、シリンジを与える。前述の欧州特許出願06010976.6に記載されるピペットチップホールダーは、直接このシリンジに、特に、ピストンチューブ518に付着されると有利である。この配置により、ピペットユニット500の特にコンパクトな設計が可能となる。
【0226】
ピペット開口732が液体に浸され、ピストン516が挙上されると、ピストンチューブ518のガス容量の増加が、ピストンチューブ518およびピペットチップ730内部に減圧を生成する。この減圧によって、流体が、開口732を通じてピペットチップ730の中に吸引される。吸引される液体の容量は、ピストンチューブ518中のガス容量の増加に対応する。
【0227】
ピペットチップ730が液体を含み、かつ、ピストン516が一定の高さに保持される場合、該液体はピペットチップの中に保持される。
【0228】
ピペットチップ730が液体を含み、かつ、ピストン516が下降すると、ピストンチューブ518中のガス容量の減少は、ピストンチューブ518およびピペットチューブ730の内部に過剰圧を生成する。この過剰圧によって、液体は、開口732を通じて、ピペットチップから外に輸送される。排出される液体の容量は、ピストンチューブ518のガスの減少容量に対応する。
【0229】
ピペットチップを受容するために、ピペット部材501は、ピペットチップホールダー520と共に、ピペットチップステーション720(図1および図12を参照)に配される、適切なピペットチップ730の上に動かすことが可能である。ピペット部材501は、ピペットチップホールダー520が、約10−50Nの力でピペットチップの中に押し込まれるように、下方に向かって動かされる。次に、ピペットチップは、例えば、ピペットチップホールダー520の外周面を取り巻くシールの圧迫によって、該ピペットチップホールダー中に保持される。この種のシールは、欧州特許出願06010976.6に記載される。この出願に対する参照を再び行っている。
【0230】
ピペットチップ730を廃棄するために、廃棄物のための処分システム740が、図1bの平面図に示すように与えられてもよい。この処分システム740は、大きな断面積を持つ区域744および小さな断面積を持つ区域746を持つ開口742を含む。区域744の大断面積は、ピペットチップ730が貫通可能となるように設計される。区域746の小断面積は、ピペットチップ730は貫通することができないが、ピペットチップホールダー520は貫通可能となるように設計される。
【0231】
処分の場合、ピペットユニット500は、ピペットチップ730を持つピペットチップホールダー520が、大断面積を持つ区域744の上にあるように動かされる。次に、ピペットチップ730を持つ、このピペットチップホールダー520は下降され、ピペットチップが、開口742の中に押しこまれる。次に、ピペットチップ730を持つピペットチップホールダー520は、小断面積区域746の中に動かされ、ピペットチップホールダー520が、開口742から引き抜かれる。ピペットチップ730は、例えば、その上縁において、開口区域744の辺縁によって保持され、したがって開口742の下に留まる。一旦ピペットチップホールダー520が完全に開口から排除されると、ピペットチップ730は、ピペットチップホールダーから自身を引き離し、開口742の下に与えられた使用済みピペット用コンテナの中に落下する。
【0232】
ピペット操作の全体手順をこれから記載する。ピペット操作のために、ピペットユニットは、何よりも先ず、前述のようにピペットチップを摘みあげる。次に、この、摘みあげられたピペットチップ730は、吸引すべき液体を保持するコンテナの上にピペット本体501と共に動かされ、下降して該コンテナ中に入る。
【0233】
ピペット操作中、ピペットチップ730がコンテナの中に下降される前に、コンテナの充填レベルが既知であるか、または定量されていると有利である。このことは、後述の充填レベルを測定するいくつかの方法の内の一つ、例えば、超音波ユニット830を用いる方法を用いて実行することが可能である。次に、ピペットチップ730は、前述の実施態様とは独立に、充填レベルに応じて容器の中に全体として下降させることが可能である。これは、例えば、ピペットチップにおいて滴がほとんど形成されないように、充填レベルとの対応を選択することが可能であるという利点を有する。
【0234】
次に、所望量の液体がピペットチップ730の中に吸引され、ピペットチップ730は、標的容器の上に動かされ、所望量の該液体が、ピペットチップから標的容器の中に放出される。標的容器中の液体によるピペットチップのコンタミネーションを回避しなければならない場合は、ピペットチップが、標的容器の上のある高さに置かれると有利である。これは、標的容器中の液体、または、標的容器の壁または辺縁との接触を排除するからである。
【0235】
基本的に、コンタミネーションを阻止するために、ピペットチップ730を交換するのが有利である。なぜなら、もしそうしないと、サンプルのコンタミネーション、またはサンプル同士のクロスコンタミネーションの危険性が生じる可能性があるからである。このために、ピペットチップは、前述のように、廃棄物処分ステーション740の中に廃棄され、新しいピペットチップが、前述のように摘みあげられる。
【0236】
グリッパーユニット
図8は、グリッパー400の斜視図を示す。グリッパーは、図6に示すように、レール345にそってZ方向に動くことが可能なグリッパー部材401を含む。このために、グリッパー部材401は、ピペットユニット500の対応要素(図7の記載を参照)と同様に、レール345のためのキャリッジ445、および、リフトベルト342を有する懸垂手段340、ローラー346a、b、およびドライブ348を含む。
【0237】
グリッパーユニット400は、容器160を把捉するためのグリッパー410を含む。グリッパーの詳細な図面が図9に示される。グリッパーは、剛性のグリッパー筐体を含む。グリッパーはさらに、二つのグリップアーム416a、416bを含む。このグリップアームは、グリッパー筐体412において、それぞれ、スピンドル426a、426bから懸垂され、かつ、それぞれのスピンドルの周囲に回旋可能である。グリップアームが閉鎖方向に回旋されると、二つのアーム416a、416bは、容器の把捉区域において互いに向かって動き、したがって、容器160をその頸部168において把捉することが可能となる。容器をその頸部168において把捉するために、頸部168に適合する陥凹417a、417bが、グリップアーム416a、bの、それぞれの把捉域に与えられる。
【0238】
容器160の把捉のために、ドライブ420が与えられる。このドライブは、リフト要素422の移動を駆動する。リフト要素の移動は、グリップ要素の二つの上肢を押して引き離し、そのため、下肢、すなわち、上肢からは、スピンドル426a,bの反対側に配される肢は、互いに向かって押しつけられる。下肢は、容器のための把捉域を含む。したがって、前述の運動は、閉鎖方向の運動であり、下肢の圧迫は、容器160の把捉を可能とする。
【0239】
容器160を解除するために、ドライブ420は、リフト要素422を反対方向に、すなわち、図9において上方に動かすことが可能である。このようにして、アーム416a、416bの二つの上肢は、リフト要素422による引き離され方がより小さくなる。その結果、バネ、または弾性要素424が、二つの上肢をさらに互いに向けて押しつけることが可能となる。このようにして、グリッパーは開放方向に動かされ、容器は解除される。
【0240】
同図において、弾性要素424は、グリップアーム416a、416bの下肢域における圧縮バネとして示される。しかしながら、例えば、バネが、上肢域における弾性引っ張り要素の形状を取る別態様も可能である。弾性引っ張り要素は、リフト要素422と不要な衝突を起こすことがないように注意しなければならない。これは、引っ張り要素に、例えば、二つの上肢の間に差し渡される弾性リングの形状を取らせることで可能である。
【0241】
グリッパーの開放状態を検出するために、グリッパー410はさらに、グリッパーが開放しているか、閉鎖しているかに関する情報を含むセンサー信号を発信するホームセンサー428を含む。このために、ホームセンサー428は、例えば、その光路が、グリッパーの状態に応じて、グリッパーの四肢によって中断されるか、または中断されない、光ビームを含んでもよい。このようにして、ホームセンサーがその状態を変える開放状態、例えば、光ビームの光路が、貫通状態から、中断状態に変化する状態を検出することが可能である。可能な一実施態様では、較正開放状態は、例えば、グリッパーが最大限度開放した開放状態である。
【0242】
ある好ましい実施態様では、リフト要素のドライブ420はステッピングモーターである。この実施態様では、較正開放状態が検出可能とされる場合、グリッパーの各開放状態が、較正開放状態から始まる、ステッピングモーターのステップをカウントすることによって検出可能とされる。例えば、図16に示す、他のホームセンサーも類似の機能を持つ。
【0243】
以上に加えて、グリッパー410は蓋ホールダー414を含む。蓋ホールダー414は、グリッパー筐体412に剛強に接続される。蓋ホールダー414は、容器の蓋166に対しストップを与える。蓋166は、蓋166を容器160に接続し、したがって蓋を固定位置に位置決めするか、または保持する接続要素164の弾性力によってストップに対して押しつけられる。グリップアーム416aは、その外に陥凹を含む。該陥凹は、その中を接続部材164が貫通することが可能となるように設計される。この陥凹、および蓋ホールダー414を介して、グリッパー410に対し容器160を配向させることが可能となる。しかしながら、グリッパーはさらに、蓋166を含まない容器160を把捉してもよい。そのような場合、配向は与えられない。
【0244】
再び図8を参照すると、グリッパー410は、スピンドル436aの周囲に回転可能に登載される。グリッパー410は、回転装置430によってスピンドル436aの周囲に回転させることが可能である。回転デバイス430は、回転ドライブ431、ドライブギア434、もう一つのギア436、およびホームセンサー438を含む。回転ドライブ431は、ドライブギア434を駆動するように配置される。ドライブギア434は、前記別のギア436と嵌合する。グリッパー410は、別のギア436と固定的に接続され、該ギアと共に、回転スピンドル326aの周囲に回転することが可能である。
【0245】
回転ドライブ431は、グリッパー410の所望の角度が、回転軸436aの周囲に調整可能となるように、ステッピングモーターとして構築されるのが好ましい。ホームセンサー438は、グリッパー410が回転して、元のまたは較正位置に戻り、したがって、ステッピングモーター431を調節するための較正点を構成しているかどうかに関して情報を供給する。較正点の機能は、前述のグリップアーム416a、bの較正開放状態の機能と同様である。
【0246】
グリッパー400は、グリッパー410の回転装置430によって、少なくとも120°回転可能となるように構築されるのが好ましい。
【0247】
その上、グリッパー400は、遠心機200の容器ホールダー120のための位置決めデバイス450を含む。この位置決めデバイス450は、位置決めスパイク452を含む。この位置決めスパイクは、容器ホールダー120の対応する位置決め開口124に嵌合することが可能である。さらに一般的に、位置決め要素452は、容器ホールダー120の、位置決めカウンター要素124と嵌合する、または、例えば、電磁力によって位置決めカウンター要素と相互作用を持つことが可能となるように構築される。位置決めスパイクのための位置決め開口を有する、この種の容器ホールダーが、例えば、図10に示される。この嵌合によって、グリッパー部材401が、容器ホールダー120に対して定められた位置に設置されることが確保される。
【0248】
その上、位置決めデバイスは、位置決めスパイク452に接続される位置決め部材451を含む。この位置決め部材451は、グリッパー部材401とは独立に、Z方向に位置決めレール456にそって動くことが可能である。このために、位置決め部材451は、位置決めレール456にそってZ方向に滑走することが可能な位置決めキャリッジ457に接続される。その外、位置決め部材は、固定具458a、bを用い、位置決めバネ458によってグリッパー部材401に接続される。位置決めバネ458は、グリッパー部材401に対する位置決め部材451の運動のためのリセット力を与える。位置決めバネは、容器の把捉時、位置決めスパイク452によって、十分な力が、位置決めカウンター要素124に対して適用され、そのため、これらの二つの要素間における嵌合が確保されるようにする。その力は、1と10Nの間にあることが好ましく、1と5Nの間にあることが好ましい。
【0249】
図示の実施態様とは独立に、バネの挙上範囲(すなわち、位置決めバネ458が、位置決め要素452を位置決めカウンター要素124に押しつける、容器ホールダー120に対する、z方向のグリッパー部材410の高さ間隔)は、容器ホールダー120からの容器の160の排除、または、該ホールダーへの容器の挿入の際、要求を満たすように選ばれる。例えば、位置決め要素452および位置決めカウンター要素124の間の嵌合が、保持位置からの容器の160の排除、または、保持位置への容器の挿入の全行程を通じて維持され、その間、容器は、容器ホールダーと接触を維持するか、または、容器ホールダーから完全には排除されないか、または、部分的だけでも挿入されるように選択されると有利である。
【0250】
グリッパー410は、例えば、生物学的流体用の下記の容器を把捉するのに好適である。
−蓋無しの、スピンチューブ160、エッペンドルフチューブ170、または同様の容器。これらの容器は、外側から、グリップアーム416a、416bによって把捉される。任意に、一つ以上の陥凹417a、417bが、容器の頸部に嵌合する。
−蓋166、176付きの、スピンチューブ160、エッペンドルフチューブ170。蓋無し容器の場合と同様に、その外、任意の蓋ホールダー414が、前述のように蓋166、176を確保する。
生物学的流体用容器は、ここでは、そのような液体を受容するためのもので、その液体と接触する成分と定義される。
【0251】
その外、グリッパー410および容器ホールダー120は、グリッパーが、容器ホールダーを把捉することが可能となるように構成することが可能である。このために、容器ホールダーの一部は、グリッパーを介して把捉するように設計される。例えば、保持位置150は、図10に示す容器ホールダーとは対照的に、グリッパーが、容器と同様にそれを把捉できるように、頸部を備えていてもよい。一方、容器ホールダーは、任意の蓋ホールダー414が、把捉操作を妨げないように設計されることが好ましい。さらに、蓋ホールダーは、容器ホールダーの配向を定めるように、例えば、保持位置150によって定められる、軸周辺の回転角度を定めるように、適切な構成の容器ホールダーと共に使用されてもよい。
【0252】
グリッパーは、容器160を、別の容器170に設置するのに好適である。この挿入は、保持位置130、150に容器160を設置するのと同様に実行される。別容器170は、容器ホールダー120の保持位置140にあることが好ましい。容器ホールダー120は、遠心機200の中に配されることが好ましい。
【0253】
グリッパーは、別の容器170から容器160を排除するのに好適である。この排除は、保持位置130、150から容器160を排除するのと同様に実行される。別容器170は、容器ホールダー120の保持位置140に配されることが好ましい。容器ホールダー120は、遠心機200の中に配されることが好ましい。その外、排除操作の間、保持位置140の中に別容器170を固定するための装置を与えると有利である。このような装置は、例えば、別容器170に対し、該容器の上側または辺縁において接触して、該容器を押し下げる圧迫要素(図示せず)の形状を取ってもよい。このような圧迫要素は、バネによって、例えば、位置決め要素452に対するのと同様にあらかじめ張力を与えることも可能であるし、または、位置決め要素452と一体的に形成されてもよい。
【0254】
前述のように、グリッパーのドライブ420、431、441は、ステッピングモーターとして設計される。駆動されたユニットが構成位置に達した時点を検出するためにホームセンサー428、438、および448が与えられる。ステッピングモーターのステップ数をカウントすることによって、較正位置から始まる駆動ユニットの各位置を検出することが可能である。ホームセンサー428、438、および448は、光ビームとして設計される。較正位置に達すると、光ビームの光路が中断される。
【0255】
さらに別態様として、ホームセンサーは、較正位置に達すると、光ビームの光路が開放されるように設計されてもよいし、または、接触センサー、または他のセンサーとして構築されてもよい。
【0256】
ヒーター/攪拌器
図13および14は、サンプルまたは液体を加熱および攪拌するためのユニット600の図を示す。このユニットは、例えば、手順の分解工程を実行するのに使用してもよい。さらに、このユニットは、サンプルを加熱および/または攪拌しなければならない、他の手順工程のために使用されてもよい。同時に、ユニットは、生物試料のために定められた保持位置を与える。したがって、さらに、加熱および攪拌用のユニット600は、装置のサンプルホールダーとして作動してもよい。
【0257】
図13に示すように、加熱および攪拌用ユニット600は、作業プラットフォームの高さのために与えられる、作業プラットフォーム用挿入体602を備える。その外、ユニット600は、12個の容器保持位置612を持つ容器キャリヤ610を含む。この容器キャリヤは、ユニット600に保持され、手動で該ユニットに挿入することが可能な容器に対して適応される。いくつかの別タイプの容器が使用される場合、異なるタイプの容器キャリヤが与えられてもよい。次に、ある任意の手順に好適な、特定の容器キャリヤを、ユニット600に設置することが可能である。この場合分類をより簡単にするために、容器キャリヤには番号が与えられる(図14bを参照されたい、同図では、容器キャリヤは数字”2”を帯びる)。
【0258】
図示の容器キャリヤ610は、任意に蓋を持ち、6個の容器が2列に配される、12個の反応容器(例えば、エッペンドルフキューブ、またはその他の容器)のために設計される。図14aの断面図に示されるように、一列、すなわち、保持位置の内の6個は、1.5ml方式のために、他列は2ml方式のために設計される。容器キャリヤ610は、反応容器の蓋を受容するための蓋保持位置616を持つ。さらに、この蓋保持位置616は、例えば、スロット、溝、またはポケットの形状を取ってもよい。容器キャリヤ610は、容器をその中に保持したまま、または、サンプルをその中に含んだまま、まとめて挿入および排除することが可能である。その結果、容器キャリヤ610は、装置の外側において負荷されることが可能である。容器キャリヤは、容器が、ヒトの裸の手で挿入および排出が可能となるように構築されていてもよい。それとは別に、容器が、一方の上に他方を被せた2枚の実験用手袋を用いて挿入および排出が可能となるように構築されてもよい。さらに、容器キャリヤは、容器が、機械によって挿入および排出されるように構築されてもよい。この場合、蓋保持位置616が与えられる場合、グリッパー410(図9参照)に与えられる任意の蓋ホールダー414が蓋にアクセスすることが可能となるように、該蓋保持位置を設計すると有利である。
【0259】
この12個の保持位置を備える容器キャリヤ610によって、最大12種の異なるサンプルについて平行的処理が可能となる。異なるサンプルを平行的に処理する場合、割り当ての誤りを避けるために、容器キャリヤを明瞭に位置決め可能とすると有利である。明瞭な位置決めのための装置を、例えば、図13に示す。この装置では、方向性要素618、例えば、レール、陥凹、またはスロットが、容器キャリヤ610に与えられ、発振フレーム634には、対応するカウンター要素619が登載され、そのため、容器キャリヤ610は、一方向においてしか発振フレーム634中に挿入されないようになっている。さらに、割り当ての誤りを避けるために、保持位置612を、例えば、図14bに示すように、記数法613を介して表示すると有利である。
【0260】
図13は、さらに、加熱要素622および熱移送要素626を含む加熱システムを示す。図13の実施態様に示すように、熱移送要素626が、容器キャリヤ610に挿入された容器と直接接触するように、熱移送要素626および容器キャリヤ610が構築されていると、加熱システムの効率が増す。熱移送要素626は、熱伝導性がλ>30W/(mxK)であることが好ましく、もっとも好ましくはλ>100W/(mxK)である。
【0261】
熱移送要素626は、例えば、ネジ接続を介してヒーター600に接続される。容器方式が変更した場合、要素626も変えられてよい。さらにそれとは別に、熱移送要素626は、容器キャリヤ610の一部として構築されてもよい。次に、容器キャリヤのこの部分は、熱伝導性試料、例えば、熱伝導性金属を含むことも可能である。次に、容器方式が変更した場合、変更しなければならないのは容器キャリヤ610だけである。
【0262】
図示の実施態様では、サンプルは、70℃の温度まで加熱することが可能である。室温から55℃までの範囲の加熱時間は約5分である。容器キャリヤ610に挿入された容器中の流体に要求される温度の正確度は、±3K(55℃において)である。温度の正確度は、流体の標的温度からの種々の変位、例えば、加熱器の標的温度からの変位、または、ヒーター内部における温度差に関連する。
【0263】
加熱要素626は、約100Wの出力を持つ電気加熱要素である。その中には、二つの、別々の加熱回路が与えられる。加熱回路の電力の有利な分割は、第1加熱回路に対して70W、第2加熱回路に対して30Wである。
【0264】
温度調整は、温度センサー、例えば、タイプPT1000を読み取ることが可能である。加熱は、加熱時間および温度正確度に関して前述の仕様を実現することが可能な規模を持つ。電力回路には、直列に接続される温度安全装置が存在する。これは、自己再設定的ではない。図示の実施態様では、能動的冷却はない。
【0265】
さらに、容器キャリヤ610は、加熱要素620に対し、手保護器および断熱部として設計されてもよい。このようにして、ユーザーに対する火傷の危険を回避または低減することが可能となる。例えば、容器キャリヤは、熱伝導性がλ<5W/(mxK)、より好ましくはλ>2W/(mxK)であるハンドル部分を持ってもよい。
【0266】
その外、容器キャリヤ610は、断熱性試料、例えば、セラミックまたはプラスチックによって製造されてもよい。これは、その絶縁性が、熱損失も減らすという付加的利点を持つ。使用されるプラスチックは、例えば、121℃で20分のオートクレーブ処理を耐忍する、オートクレーブ処理可能なプラスチックであってもよい。
【0267】
いくつかの手順の分解工程は、サンプルが機械的に攪拌されることを必要とする。このために、図13の実施態様は、攪拌器/ヒーター600の中に一体化される攪拌システム630を含む。この攪拌システム630は、装置1に付着されるドライブブロック636、および、動くことが可能で、ドライブブロック636によって、作業プラットフォーム2に対して発振させることが可能な発振プラットフォーム632を含む。前述の加熱システム620および容器キャリヤ610は、発振プラットフォームの上に、これらの要素が、発振プラットフォームと共に共振するように登載される。
【0268】
ドライブブロック636は、例えば、公刊物EP 1 201 297の中に記載される。これは、攪拌運動を生産するための電気ドライブを含み、四つの別々のコイルから成る十字形配置を含む。これらは、ステッピングモーターによって活性化される。しかしながら、このドライブは、他の、任意の、所望の電気ドライブであることも可能である。攪拌運動の意味するところは、交互の振動運動、または、重心の回りの回転運動、または、それらの、または類似の運動の組み合わせである。
【0269】
本実施態様では、攪拌システム630は、回転攪拌器として構築される。これは、攪拌運動の振幅が約2mm(ピーク・ツー・ピーク)、および、最大攪拌周期または攪拌速度が2000rpmを超えるものを可能とする。攪拌運動は、飛沫の飛散、したがって、サンプル間のクロスコンタミネーションができるだけ回避されるように設計される。このために、攪拌運動は、一平面において起こり、ごく僅かしか、まったは全く垂直成分を持たない。この攪拌システムでは、作業プラットフォームのためのドライブブロック636および挿入体602は、作業プラットフォームに対して固定される。図13に示す他の要素は攪拌される。
【0270】
サンプル容器のためにスクリーンまたは遮蔽物を与え、それによって、攪拌運動の際に生産される可能性のある、何かの飛沫が、捕捉されてクロスコンタミネーションを招くことがないようにすると有利である。遮蔽物は、分離要素、例えば、分離壁を有する容器キャリヤ610を適切に設計することによって獲得することが可能である。この種の分離要素は、図13および14には示されていない。これらの分離要素は、容器ホールダー610と一体化される、隣接容器保持位置612の間に設けられる分離壁として生産されてもよい。分離壁は、容器が容器保持位置の一つに挿入された場合、該容器保持位置612に与えられる容器の、少なくとも上縁の高さに対応する高さを持ってもよい。分離壁の高さは、容器の上縁の高さよりも3から7mm高いことが好ましい。それとは別に、スクリーンはさらに、容器キャリヤ610に設置が可能で、分離要素を与える、新たに加えられる、別の部分を介して生産されてもよい。分離要素は、ピペットユニット500および/またはグリッパー400が依然として容器に対してアクセスが可能となるように構築されることが好ましい。
【0271】
さらに、発振プラットフォームが、定められた安静位置で停止可能であると有用である。例えば、発振プラットフォームをストップまで運び、定められた安静位置におけるこのストップに対し該プラットフォームを位置決めすることが可能となるように、電磁石を攪拌器に配置してもよい。それとは別に、ドライブブロックには、例えば、定められた安静位置に位置決めするための手段、例えば、グリッパーのドライブと同様、ホームセンサーを有するステッピングモーターを与えてもよい。
【0272】
ヒーター/攪拌器600については、他の、代替実施態様も可能である。例えば、攪拌システムを持たない加熱要素だけ、または、加熱要素を持たない攪拌システムだけでも、それぞれの場合他方のシステムが不要であれば、使用が可能である。さらに、他の機能を付け加えてもよい。例えば、冷却、例えば、空気、水、または熱電気冷却による冷却を用いてもよい。さらに、この冷却操作は、遠心機の冷却部230、250(図3参照)と組み合わせてもよい。
【0273】
その外、保持位置612の配置も変えることが可能である。図13および14は、6x2保持位置から成るマトリックスであるが、n x m個の保持位置を持つ、他の配置も可能である。他の、可能な代替配置としては、例えば、円形または六角形配置が挙げられる。
【0274】
容器キャリヤ610の保持位置612を、遠心機200の保持位置の配置と対応するように配置すると特に有利である。この利点は、容器キャリヤ610の保持位置612と、遠心機の保持位置とを協調させることが特に容易となることである。特に、容器キャリヤ610が、処理されていないサンプルのサンプルホールダーとして使用され、かつ、遠心機が処理済サンプルを与える場合、このようにすると割り当ての誤りの危険が低減される。
【0275】
保持位置612の配置は、図13および14に示す実施態様では、熱移送要素626によって指定される。しかしながら、さらに、例えば、液体浴を用いる別の加熱システム、または、容器キャリヤと一体化される熱移送要素であれば、保持位置612の配置についてさらに大きな屈曲性が可能とされる場合がある。
【0276】
消耗品ステーション
図12は、消耗品700のための、消耗品ステーションの斜視図を示す。この消耗品ステーションは、流体を処理するためのコンテナステーション710、ピペットチップ730のためのピペットチップステーション720、および、処理流体を有する、別の容器ホールダー714、716を含む。
【0277】
流体処理用コンテナステーション710は、処理流体を有するコンテナ712のための6個の保持位置を含む。手順に応じて、異なる処理流体を使用してよい。使用される処理流体の例としては、結合−洗浄−溶出工程を実行するためのバッファー流体がある。それに加え、コンテナステーション710は、消耗品のための消耗品ステーション700からステーション710を排除するためのハンドル718を含む。さらに、ハンドル718は、コンテナステーション710が、ステーション700に挿入可能とされる明瞭な方向性を指示する。
【0278】
さらに、消耗品ステーション700は、さらに処理流体を含む、コンテナのための保持位置716、714を含む。これらのコンテナは、コンテナ712に近似するが、ほんの少量だけ使用された処理流体のために与えられる。ステーション714および716は、ステーション714が、容器の蓋のための蓋ホールダーを含む点で異なる。したがって、例えば、さらにエッペンドルフチューブも、この中で容器として使用することが可能である。逆に、ステーション716は、蓋ホールダーを持たず、それゆえ、蓋またはネジ閉鎖を持たない容器のためにのみ使用される。
【0279】
その上、図12は、ピペットチップステーション720を示す。これは、消耗品のための消耗品ステーションから取り出すことが可能である。ピペットステーション720は、ピペットチップ730のための、複数の保持位置を含む。図は、二つのピペットチップステーション720で、例えば、保持するピペットチップの性質において異なる二つのステーションを示す。例えば、この二つのピペットチップステーションのピペットチップのピペット容量が異なっていてもよい。
【0280】
ピペットチップのタイプの認識を可能とするために、ピペットチップステーション720は、マーキング721、722を有する。これらのマーキングは、例えば、光学センサーを用いて検出可能とされる突出要素として構築される。各マーキングは、突出要素が存在する(1)か、または存在しない(0)かに応じて、1ビットの情報を運ぶことが可能である。したがって、要素721、722は、2ビットの情報、すなわち、1から4までの数字に対応する情報を運ぶ。したがって、図示の実施態様では、四つの異なる読み取り可能な状態を識別することが可能である。これらの状態の内三つは、ピペットチップの異なるタイプと関連するが、4番目の状態は、「ピペットチップが存在しない」ことを示す。
【0281】
マーキング721、722の別形も可能である。例えば、マーキングは、光の異なる吸収または反射を持つように表面をコートしたコンテナ部分を有することによって与えることも可能である。さらに、マーキングの性質も、例えば、色彩コード、または、磁気的に読み取り可能なコードによって置換してもよい。さらに、図12に示したコードビットの数も変動が可能である。別態様として、例えば、読み取られるマーキングの数は、1、3、4、または別の数を与えることも可能である。
【0282】
要素721、722は、ピペットチップステーションの、二つの短辺にそって点対称となるように設計される。その結果として、マーキングは、転回に対する保証として登載される、すなわち、ピペットチップステーション720が、消耗品ステーション700において二つの可能な方向性の内のどちらを取ろうと、それとは無関係にマーキングを読み取りすることが可能である。図12は、ビット列1−1に対応するマーキングのタイプ、すなわち、両マーキングが存在することを示す。
【0283】
その上に、ピペットチップステーション720は、陥凹724およびストリップ725を含む。このストリップ725は、図12に示すように、陥凹724に挿入可能とされ、したがって、二つの隣接ピペットチップステーション720を連結可能とするように設計される。
【0284】
その上に、ピペットチップステーション720は、それによって、消耗品ステーション700の中へ、または、該ステーションから外へ、手動による挿入および排除のために把捉することを可能とする、二つの、向き合うハンドル要素726を含む。挿入時、ハンドル要素726の下に配置されるフック部分は、消耗品ステーション700と噛みあう。排除のためには、フック要素は、ハンドル要素726を再び同時に押すことによって解除される。
【0285】
さらに、消耗品ステーション700は、それによって、該ステーションを作業プラットフォームから排除すること、または、該ステーションを作業プラットフォームの中へ挿入することが容易になるホールダー708を含む。
【0286】
廃棄物ステーション
図1に示す廃棄物処分システム740の下部には、廃棄物、例えば、使用済みピペットチップ、またはカラム、または他の容器などのための受容コンテナがある。さらに、作業プラットフォームにおける自身の開口を通じて到達することが可能な、廃棄流体のための受容コンテナが任意に与えられる(図示せず)。
【0287】
ピペットの処分が、図7を参照しながら記載される。他の、任意の廃棄物を処分するために、ピペットは、開口748を通じて、受容コンテナの中へ投げ込むことが可能である。例えば、処理のために使用されたが、もはや必要とされない流体は、開口748を通じて、放出する、例えば、ピペットアウトすることが可能である。さらに、もはや必要とされない容器、例えば、フィルター容器は、開口748を通じて処分することが可能である。
【0288】
種々の受容コンテナを、共に、廃棄物用受容装置の中に、別々の容器として、または共通の容器として配置することが好ましい。受容装置は、一体として取り出すことが可能となるように構築されてもよい。例えば、受容装置は、図2aの廃棄ステーション750について図示されるように、ディスプレイ910の下から排除することが可能な引き出しの形を取ってもよい。
【0289】
調節部およびセンサー
図15は、生物試料を処理するための装置の活性化を線画で示す、高度に単純化した模式図を示す。調節部は、コンピュータ870a′、インプットおよびアウトプットユニット870b′、外部装置と交信するためのインターフェイス870c′、および、装置1の調節部分、例えば、モーター、ステッピングモーター、光ビームのためのインターフェイス862′を含む。これらすべての構成要素はボード870′またはいくつかのボードに分配される。
【0290】
コンピュータ870a′は、プロセッサー、作業メモリー、オペレーティングシステム、好ましくは埋設OS、および、各種調節機能を実行するためのプログラムを含む。作業メモリーには、中でも特に、一つ以上のプロトコール、および、該プロトコールを実行するためのパラメータが保存される。
【0291】
インプットおよびアウトプットユニット、またはユーザーインターフェイス870b′は、ディスプレイ910を調節するためのグラフィックコントローラー、および、例えば、キー、および/または、タッチスクリーンの形を取ってもよいグラフィックディスプレイを用いる、インプットを受容するためのインプットインターフェイスを含む。インターフェイス870c′は、例えば、イーサーネットインターフェイス、USBインターフェイス、RS232インターフェイス、または他の通例のインターフェイスであってもよい。さらに、インターフェイス870c′は、Webサーバーを含んでもよい。
【0292】
インターフェイス862′は、調節される各種個別装置、例えば、ステッピングモーターのための、適切な調節インターフェイスを含む。図15に示す、各種調節可能ユニットは、図16の記載の中に列挙される。
【0293】
図16は、例として、生物試料処理用装置の調節部の、比較的詳細な図面を示す。図16の調節ユニットは、例えば、図1cに示す装置において使用してもよい。この場合、メインボード870は、装置の本体、すなわち、作業プラットフォーム2の下に収容される。Y−ボード874は、Y−レール314の上に配置される。キャリッジボード872は、キャリッジ320の上に配置される。グリッパーボード876は、グリッパーユニット400の上に配置され、ピペットボード877は、ピペットユニット500の上に配置される。遠心ボード878は、遠心ユニット200の中に配置される。前述のボード類は、図15のコンピュータボード870′に対応する。メインボード870は、メインコンピュータ870a、グラフィックコントローラー870b、およびインターフェイス870c、870d、870eを含む。さらに、メインボードは、装置の、調節される、各種ユニットのためのインターフェイス862、864を含む。その上に、メインボードは、キャリッジボードに登載されるカウンターインターフェイス871bを通じてキャリッジボード872と交信するためのインターフェイス871aを含む。
【0294】
メインコンピュータ870a、グラフィックインターフェイス870b、およびインターフェイス870c−eは、図15に示す要素870a′、870b′、および870c′に対応する。インターフェイス870c−eは、下記の機能を持つ。インターフェイス870cは、USBマスタープロトコールを調節するUSBホストインターフェイスである。したがって、インターフェイス870cは、新しいプロトコールが、例えば、USBメモリースティックを通じて、メインコンピュータ870aのメモリーへ負荷されることを可能とする。870dは、例えば、メンテナンスのために使用が可能なシリアルインターフェイス(RS232)を表示する。それとは別に、インターフェイス870cおよびdを組み合わせ、任意の所望のプロトコール、例えば、イーサーネットまたはTCP/IPを使用することも可能である。インターフェイス870e(RS232)は、遠心機のドライブボード878との交信のために働く。
【0295】
メインコンピュータ870aは、ステッピングモーターおよび光ビームのための各種インターフェイス862を、直接に、または、インターフェイス871aおよび871bを通じて調節する。光ビームは、一般に、ステッピングモーターのためのホームセンサーとして活動する、すなわち、例えば、ステッピングモーターによって駆動される部分に固定されるブロック部分が光ビームを遮る時、該駆動される部分が定められた較正位置に置かれた時に、センサーに信号または信号変化が生じる。それとは別に、さらに、光ビームは、動かされる部分に付着されてもよい。このようにして、メインコンピュータ870aは、特に、X−レール316、319におけるY−レールの運動;Y−レール326、329におけるキャリッジの運動;Z軸441、448にそうグリッパーの運動;グリッパー420、428の回転運動;グリッパーアーム431、438のグリッパー運動;ピペット部材541、548のZ運動;および、ピペットピストンドライブ512の運動のための、それぞれのステッピングモーターおよびホームセンサーを調節する。さらに、メインコンピュータ870aは、ヒーター/攪拌器のためのモーター636の運動を調節する。この運動にはホームセンサーは必要とされない。しかしながら、インターフェイスによって調節することが可能な、任意の光ビーム850は、他の目的のために使用されてもよい。他の光ビーム850、852は、他のインターフェイス、例えば、一貫性チェックおよび他の欠陥検出のためのインターフェイスを通じて活性化されてもよい。
【0296】
その上に、メインコンピュータは、遠心機を換気するためのモーター234、251、および、別のインターフェイス864を通じて、ヒーター/攪拌器600の加熱要素622および温度センサー624を調節する。異なるステッピングモーターのための各種インターフェイスが、異なるボード870、872、874に渡って分布される。
【0297】
その外、メインコンピュータ870aは、インターフェイス870eを通じて、遠心機200のドライブ電子部878を調節する。このドライブ電子部878は、例えば、遠心機のモーター218の調節、適切な開放機構260(図示せず)による遠心機蓋240の開放、およびドアロック269の開放のための、必須調節手段を含む。
【0298】
さらに、グリッパーボード872には、メインコンピュータ870aと交信する別のコンピュータ872aが与えられる。このコンピュータ872aは、光センサー810(さらに図7も参照)および超音波ユニット830を、対応するインターフェイス866、867を通じて調節するように働く。光センサーは、光学センサー810aおよび光源810bを含み、超音波ユニット830は、超音波センサー830aおよび超音波源830bを含む。その上に、コンピュータ872aは、他のステッピングモーター441、420、431、541、512、および、関連ホームセンサー448、428、438、548、518を、それぞれのインターフェイス862を通じて調節するためのドライバーを含む。
【0299】
装置およびその負荷の各種状態を検出するためのセンサーを装置に装備すると有利である。センサーは、例えば、下記の機能の内の一つ以上を実行するのに好適であってもよい。
−例えば、ピペットチップ用コンテナ720で、ピペットチップのために与えられた保持位置においてピペットチップ730を検出すること;
−遠心機で容器ホールダーのために与えられた位置において容器ホールダー120を検出すること、すなわち、遠心機のどの場所が容器ホールダーによって占拠されているのかを検出すること;
−例えば、遠心機200の容器ホールダー120で、またはヒーター/攪拌器600で、またはコンテナステーション710で、この目的にために与えられたホールド位置130、140、150、612においてカラム160、または容器170、またはコンテナ712、714、716を検出すること;
−例えば、何かの機械的耐性を補償するために、可動部分、例えば、キャリッジ300、またはグリッパー400、またはピペットユニット500の位置を調整すること;
−ステッピングモーターのゼロまたはホーム位置の検出;
−コンテナ712、714、716、または容器160、170における、液体または他の物質の充填レベルを測定すること;
−容器、例えば、カラム160またはピペットチップ730の性質および/または容量を検出すること;
−装置の状態、例えば、遠心機の蓋240、および装置のカウリングなどの蓋の状態、または、廃棄物コンテナの充填レベルをチェックすること。
【0300】
特に、上記機能のいくつか、またはその他の機能を実行するのに好適なセンサーを与えると有利である。
【0301】
ある好ましい実施態様では、上記機能の内の一つ以上が、キャリッジ300、グリッパー400、またはピペットユニット500に付着させることが可能な光センサー810によって実行される。例えば、図6の実施態様では、光センサー810は、ピペットユニットに付着される。その結果、光センサーは、作業面2の一部の上を動くことが可能となり、高さの調整が可能となる。
【0302】
光センサーは、赤または赤外範囲に光周波数を持ち、その放射法としてレーザーまたは光コーンを持つか、および/または、信号変調による外来光の抑制、および、三角法による背景光減衰を実行するための手段を備えるのが好ましい。したがって、光センサーは、光センサーの検出範囲において、特に、光センサーの光周波数の範囲における拡散反射に関する特定の反射性に基づいて、試料の存在を検出することが可能である。
【0303】
ピペットチップ、カラム、容器ホールダー、またはその他の消耗品などの品目の認識とは、問題の品目またはそのタイプのために意図される、装置の位置の有無に関する認識を意味する。
【0304】
光センサーの連続運動は、任意に、いくつかの品目の認識のために実行されてよい。次に、センサースポットが、例えば、様々の位置の上に線から線へ動かされる。この運動の際、適切な位置において測定が実行される。品目のための位置と、センサーとの間の機械的耐性が大きすぎる場合は、後述するように、先ずセンサー位置を調整することが可能である。運動時に測定値が採取される場合、測定時間は短くなければならず、好ましくは数ミリ秒の領域、恐らくは2から100msの間にある。それとは別に、センサーの運動は、検出方法のために停止されてもよい。
【0305】
センサーの運動は、その認識範囲が、ある特定の品目、例えば、ピペットチップ、またはピペットチップの一部のために与えられる点または位置をカバーするように選ばれる。できれば、センサーのスポットは、測定時、できるだけ正確に認識される特質に当たる命中が確実に起こるようにしなければならない。例えば、ピペットチップの場合、スポットは、ピペットチップの辺縁と接触する必要はないが、ピペットチップに対しできるだけ直角に入射しなければならない。
【0306】
認識範囲は、認識性を高める、品目の一部に向けられることが好ましい。認識性の向上とは、「品目存在」状態と「品目不在」状態の間の信号差の増大と定義される。したがって、認識性の向上を実現する部分とは、そこに品目が存在しない場合においてそれぞれの位置で検出される信号挙動とは異なる反射特徴、または、その他の何かの信号挙動を持つ。光センサーの光ビーム、または、他の何かの放射源の光ビームは、センサー方向において可視の、認識性向上部分の面積の1.5倍を超えない、好ましくは1倍または0.7倍のスポットサイズを持つことが好ましい。さらに、認識性向上部分は、センサーに対して定められた高さに配せられることが好ましい。
【0307】
ピペットチップの場合、認識性向上部分は、ピペットチップに登載されるフリースであってもよい。このフリースは通常白であるが、他のある色であってもよい。容器ホールダーの場合、認識性向上部分は、例えば、特定の反射性試料が与えられる、容器ホールダーの部分であってもよい。カラム(スピンチューブ)の場合、認識性向上部分は、膜、フィルター膜、またはフリースであってもよい。容器、例えば、エッペンドルフチューブの場合、認識性向上部分は、蓋、例えば、跳ね蓋、または、蓋のヒンジ要素または固定要素であってもよい。
【0308】
容器またはカラムの場合、それらは、任意の所望の色の液体によって、任意の所望の液体レベルまで充填してよいことを念頭においておくと有利である。さらに、カラムのフェルトも任意の所望の色を持ってもよい。それゆえ、検出方法のために背景を減衰させた光センサーを用いることが好ましい。センサー光を、第1距離を移動し、次に、第1距離よりも短い第2距離においてカラムまたは容器の上を移動させる。
【0309】
前述の方法、およびその他の方法は、図1cに示すもののような、装置の負荷状態をチェックするためには好適である。例えば、この装置において、完全性または一貫性についてチェックすることが可能である。したがって、例えば、遠心機200、または、ヒーター/攪拌器600におけるサンプルホールダーの負荷状態をチェックすることが可能である。
【0310】
装置の負荷状態をチェックするためには、異なる容器保持位置について、容器がその中に存在するかどうかを記録すると有利である。したがって、容器保持位置において存在と記録された容器の全数を、定量し保存することが可能である。したがって、例えば、遠心ローター212の容器ホールダー120の対応する保持位置における容器の全数を定量することが可能である。容器およびその位置の全数から、例えば、遠心機200における容器ホールダー120の数に関する結論を引き出すことが可能であるし、または、これは別に記録してもよい。容器保持位置において存在と記録された容器の全数に応じて、次に、容器保持位置における容器の分布に関する条件が決められる。条件は、例えば、前述したように、遠心機200の負荷状態における不均衡を最小とするように設定してもよい。次に、容器保持位置において存在と記録された容器の分布が、指定の条件と合致するかどうかに関してチェックが行われる。
【0311】
前述のように、光学センサーはさらに、容器保持位置に容器が存在するかどうかを記録するために用いられてもよい。したがって、その外に、光学センサーは、サンプル容器位置におけるサンプル容器の数も記録することが可能である。サンプル容器位置は、攪拌器/ヒーター600にあってもよい。したがって、サンプル容器の数が、存在と記録された容器の全数と適合可能であるかどうかをチェックすることが可能である。さらに、各サンプル容器に対し、容器保持位置を、例えば、遠心機200の容器保持位置を割り当てる割り当て操作を確立することも可能である。
【0312】
割り当て操作は、サンプル容器に、例えば、容器が存在すると記録された容器保持位置を割り当ててもよいし、または、その中の少なくとも一つの容器保持位置において容器が存在すると記録された、一群の容器保持位置を割り当ててもよい。さらに、割り当て操作は、サンプル容器を、容器保持位置に割り当てられる、サンプル容器位置に運ぶように指示を発することによって確立されてもよい。サンプル容器位置は、例えば、一般名によって容器保持位置に割り当てられてもよいし、または、サンプル容器ステーションにおけるサンプル容器位置の配置が、遠心機における容器保持位置の配置に対応するという事実によって、容器保持位置に割り当てられてもよい。さらに、割り当て操作は、それぞれの容器保持位置を、同じ容器のサンプル容器位置に割り当てる表を発することによって確立されてもよい。
【0313】
さらに、光学センサーは、消耗品による装置の負荷をチェックすることが可能となるようにしてもよい。このような消耗品は、容器、または生物物質であってもよい。特に、消耗品は、ピペットチップ、スピンチューブ、エッペンドルフチューブ、および生物流体、酵素、および/またはバッファー流体であってもよい。このために、処理のためのサンプルを持つ調製されたサンプル容器の数が記録される:調製されたサンプル容器の数に応じて、サンプルを処理するための消耗試料の必要数および/または量が、ある場合には、プロトコールに応じて決められ;装置に存在する消耗品の数および/または量が決められ;および、装置に存在する消耗試料の数および/または量が、必要な消耗品の数および/または量と比較される。消耗試料の現状を決めることによって、所望の状態を産生するため、ユーザーのための参照資料が生成され、モニター910に表示される。
【0314】
可動部分の位置を調整するために、さらに、一つ以上の光センサーが用いられてもよい。光センサーは、位置決めのため品目を検出するために使用されることが好ましい。一つの可能な実施態様では、一つ以上の光センサーが、可動ユニットに、例えば、キャリッジ300、またはグリッパー400、またはピペットユニット500に付着され、したがって、該ユニットと共に動くことが可能となる。ユニットの運動時、センサーは、その位置が定められ、既知であるマーキングの上を動かされる。このようにして、センサーの、それゆえ、可動ユニットの位置が決められる。
【0315】
マーキングは、光センサーの定められた位置において、光センサーにおいて信号、または信号差を誘発する要素である。例えば、マーキングは、作業表面2の辺縁によって形成され、形成は、辺縁の一側では、作業面2は光センサーの検出範囲の中にあり、他側では、検出範囲にはないように行われてもよい。それとは別に、マーキングは、異なる拡散反射特徴を持つ、二つの表面の間の境界によって形成されてもよい。いくつかの方向における位置決めを可能とするために、いくつかの方向(例えば、互いに垂直な二つの方向)に延びる、数個の辺縁または境界を用いてもよい。しかしながら、構築が非回転的に対称であるセンサー、例えば、光センサーの場合、差方向における位置決めは、通常、異なる正確度を持つ。この場合、異なる方向に方向づけられた、複数の光センサーを用いてもよいし、または、回転可能なセンサーを用いてもよい。
【0316】
位置マーキングに対する可動部分の位置は、ステッピングモーターのステップの数をカウントすることによって決めることが可能である。例えば、位置決めは、冗漫となるように設計されてもよい。位置決めは、機械的耐性を補償してもよい。
【0317】
さらに、位置決めのために他のセンサーおよびマーキングを使用してもよい。例えば、センサーは、磁気コイル、カメラ、または光ビームであってもよい。次に、マーキングは、例えば、誘導伝導要素、カラーマーキング、または、光ビームに対するブロック部材であってもよい。例えば、ステッピングモーターによって動かされる部分が、ある定められた較正位置(ホーム位置)にあるかどうかを検出するために、光ビームを用いることが可能である。この種のセンサー438を、図8および16を参照しながら記載する。
【0318】
それとは別に、センサーはさらに固定的に登載され、位置マーキングが、可動部分に与えられてもよい。例えば、図1cを参照すると、位置マーキングは、遠心ローター212に、または容器ホールダー120に与えられてもよい。次に、遠心ローター212の回転角度を、光学センサーを用いて決めることが可能である。
【0319】
さらに、遠心ローター212、または他の何かの可動部分を位置決めマーキングによって位置決めするために、可動センサーを用いることも可能である。例えば、ステッピングモーターによって動かすことが可能なセンサーユニット、例えば、ピペットユニット500の上に登載されるセンサーを使用してもよい。次に、この可動部分の位置決めが、下記の工程によって実行される。
−ステッピングモーターによって動かすことが可能なセンサーユニットの位置を較正すること、すなわち、センサーユニットのホーム位置を、例えば、光学センサーを介して固定マーキングを読み取ることによって確立すること。このマーキングは、例えば、作業プラットフォーム2の上に与えられてもよい。
−センサーユニットを、可動部分の運動域の定められた位置に動かすこと(例えば、遠心機200の場合)。定められた位置は、センサーユニットのステッピングモーターのステップ数を数えることによって達せられる。
−可動部分を動かし、例えば、遠心ローター212を回転させ、その回転を、可動部分のマーキング、恐らく、遠心ローターと共同回転することが可能なマーキングが、光学センサーとある定められた関係に納まったことを、光学センサーが検出するまで続けること。
−定められた関係から可動部分の位置を計算すること、である。
【0320】
それとは別に、可動部分の位置はさらに、センサーユニットを、可動部分の運動域の上に動かすことによって検出することが可能である。一方、センサーユニットの位置は、ステッピングモーターのステップ数をカウントすることによって更新される。可動部分のマーキングが、光学センサーに対しある定められた関係に納まったことを光学センサーが決めるとすぐに、可動部分の位置は、この定められた関係から計算することが可能である。
【0321】
生物試料、特に液体用容器の充填レベルをチェックするための、充填レベル監視デバイスは有利である。なぜなら、この種の充填レベル監視デバイスが無いと、装置に十分量のバッファーを与えるという責任がユーザーに課せられるからである。したがって、ユーザーによるチェックに関わる誤差の危険性および作業を軽減することが可能である。
【0322】
さらに、他の液体、または固体物質、例えば、粉末の充填レベルをチェックすることも可能である。特に、それぞれの充填レベルが、任意の間隔内にあることを確かめることが可能である。さらに、このような物質の存在は、後述の方法を用いてチェックすることが可能である。
【0323】
例えば、充填レベル監視デバイスを用いて、遠心機のフィルター容器(スピンチューブ)の充填レベルがあまりに高くなりすぎないように確保することが可能である。その結果として、フィルター容器が過剰に充填された場合、警告が発せられるようにすることが可能である。このようにして、遠心時、フィルター容器の目詰まりを阻止することが可能である。
【0324】
液体の充填レベルを測定するためには各種方法の使用が可能である。クロスコンタミネーションを避けるために、接触不要法が特に有利である。充填レベルの接触不要測定について、いくつかの方法が、後述の実施例を通じて記載される。
【0325】
通過時間の光学測定では、光インパルスが、光ファイバーを通じてコンテナに供給される。液体表面からの反射光がフォトダイオードによって検出される。インパルスとエコーの間のタイムラグが、充填レベルの深度の測定値である。
【0326】
超音波測定時、超音波インパルスが、ピエゾ要素、例えば、ピエゾセラミック要素から発射される。液体表面によって反射されたインパルスは、あるタイムラグの後同じピエゾ要素によって受容される。測定される通過時間は、センサーと液体表面の間の距離の測定値である。好ましくは約250kHzの透過周波数において約±1mmの解像度を持つセンサーを用いることが好ましい。さらに、参照表面を用いてシステムを較正することが好ましい。
【0327】
容量性測定時には、容量性センサーヘッドを液体表面に向かって動かし、最終的に、センサーのスイッチ点に達するまで行う。このスイッチ点は、センサーヘッドの容量電極が表面に近接した時に達せられる。
【0328】
光学的透過測定時には、レーザーの波長は、レーザー光が、充填レベルに応じて吸収されるように選ばれる。例えば、約1300nmの領域の波長が有利である。次に、吸収が、充填レベルの測定値を構成する。
【0329】
角度の光学的測定では、レーザービームは、液体の表面によって反射される。反射の角度、それゆえ液体の表面は、光学的ラインセンサーによって決められる。この方法では、物質の表面が、容器において、レーザー、または他の何かの放射線源によって照射され;液体(または、固体物質)の表面によって反射されるか、または、拡散的に反転された放射が、放射計によって測定され;放射計によって測定された放射に応じて、放射線源、放射計、および容器が互いにある空間的な関係に納められ(例えば、放射線源を傾けることによって)、そのため、物質表面に対する垂直線と、放射線源から物質表面へ通過する第1ビームとの間の第1角度が、物質表面に対する垂直線と、物質表面から放射計に通過する、第1ビームによって反射されるビームとの間の第2角度とほぼ同じになり;次に、物質表面の高さが、放射線源、放射計、および容器の空間関係の関数として決められる。
【0330】
物質表面のレベルは、一般に、第1および第2角度は同じであるという事実を用いて決められる。照射は、典型的には、直径3mmを持つペンシルビームを用いて実行される。さらに、角度測定では、他の目的、例えば、負荷の位置決め、および/またはチェックするために使用される光センサーを用いると有利である。
【0331】
光学的角度測定のために、光センサー、特に、光学的反射光センサーを用いる場合は、特に下記の誤差源を考慮に入れておかなければならない。先ず、光をあらゆる方向に反射させる可能性のある面の波状変動の可能性である。これは、全範囲に渡って偽の信号をもたらす可能性がある。それゆえ、十分長い期間において、または、表面波状変動のいくつかの波高に渡る区域において定量を実行することが有利である。このようにすると、表面波状変動は平均化されるので、滑らかな表面の反射角度とほぼ対応する反射角度において信号最大値が得られるようになる。さらに、容器の壁および底部からの反射をろ過することが好ましい。なぜなら、そうしないと、壁および底部からの反射が測定値を誤らせる可能性があるからである。これは、容器の形状が既知であれば可能である。
【0332】
さらに、接着力、好ましくは、そのレベルを調査中の、特定の液体に依存する接着力を考慮することも好ましい。接着力によって、容器の内部の壁にレンズ様平面が形成される。この表面を考慮しないと、これは、狭小な容器の場合、誤差をもたらす可能性がある。接着力を考慮するには、スポットサイズを、容器の内径を著明に下回るようにすると有利である。次に、反射角度を、水平位置の関数として測定することが可能である。依存度を、接着力を考慮したモデルと比較することによって、表面の曲線を決め、補償することが可能となる。それとは別に、スポットが十分に小さい場合、表面がほぼ水平となる、容器の中心にスポットを向けてもよい。このために、スポットの面積を、容器の内部断面の10分の1未満となるようにするのが好ましい。
【0333】
容器の性質および/または容量を検出するために、容器そのものに、または容器用コンテナのいずれかに付着させたマーキングを読み取ることも可能である。例えば、そのようなマーキングは、図12に示すマーキング突起721、722の形状を取ってもよい。このマーキングは、可動性光センサーを介して、または、光ビーム、または他の何かのセンサーによって読み取ることが可能である。
【0334】
さらに別の例として、容器のサイズは、容器のグリップ部分のサイズに依存してもよい。この場合、容器の把捉時の容器のサイズは、グリップアームの閉鎖運動の振幅を測定することによって決めることが可能である。
【0335】
さらに別の例として、容器のサイズは、その長さに依存してもよい。この場合、容器が、その長さにそって垂直に保持されるようにグリッパーによって把捉され、かつ、水平光路を有する一つ以上の光ビーム852(図1a参照)の上を、ある定められた高さにおいて動かされると有利である。容器の長さと、ある特定の光ビームの高さに応じて、該光ビームの光路は、該容器によって遮断されてもよいし、されなくともよい。長さは、狭めることも可能であるし、または、光ビームが遮断されたかどうか、または、どの光ビームが遮断されたかに関する情報から決めることも可能である。さらに、長さを決めるのに必要であれば、グリッパーを、光ビームの上を、または、異なる高さを持つ複数のビームの上を、数回動かすことも可能である。さらに、グリッパーは、光ビームの上に位置決めし、かつ、その光路が遮断されるまで、垂直方向に動かしてもよい。
【0336】
ユーザーインターフェイス、操作概念
装置の操作概念は、単純で、直感的な操作を指向する。装置のユーザーガイドは、特にこの概念に寄与する。ユーザーガイドは、手順を実行するために必要な入力工程ができるだけ少なくなるように、工程ができるだけ直感的となるように、かつ、ユーザーの必要とする関連情報は、できるだけ理解しやすい形で表示されるように設計される。例えば、このことに対する寄与は、頻繁に使用される手順の設定は保存し、かつ、直接呼び出すことが可能であるが、めったに改変を必要としないインプットフィールドは通常迂回されるという事実によって実行される。
【0337】
装置は、事実上、TFTタッチスクリーンを用いて操作される。例えば、240x320ピクセルの解像度を有するタッチスクリーンを用いてもよい。キーおよびスイッチなどの、他の操作要素も、例えば、緊急時のオフ機能のため、または、個々のモジュールのスタンドアローン操作のため任意に可能としてよい。装置はさらに、プロトコールおよびパラメータの負荷または保存のために、例えば、診断データの転送、ソフトウェア更新版の起動、または装置のリモート操作を可能とするため、ディジタルデータ用インターフェイスを含む。図16は、このため、および類似の目的のためにUSBインターフェイス870c、およびRS232インターフェイス870dを示す。
【0338】
ディスプレイ910に示される、ユーザーガイドのための典型的なスクリーン設計が図17bに示される。図示のスクリーン930は、表題932、数値フィールド、および他の各種キー(「標準」937;「セーブ」;「キャンセル」)を持つ。
【0339】
表題932は、ユーザーガイドにおける現在の状況、例えば、メニューにおける方向づけのために役立つ。表題932では、過度に長い文章は短縮される。これは、一連のドットによって示される。文章の左側または右側がより重要かに応じて、右または左が切り捨てられる。
【0340】
数値フィールドは、数値、この場合はバッファー容量を補正するために使用される。これは、オン/オフ調節要素938を含む。この調節要素938の”+”キーを押すと、数値は増加し、”−“キーを押すと、数値は減少する。可能は閾値数値934、835が示される。閾値が達せられると、調節要素938の対応キーが不活性になる。
【0341】
さらに、図示の数値フィールドと同様に、一定数の要素の中から要素を選択するための、例えば、いくつかのプロコールの中からプロトコールを選ぶためのリストフィールド(図示せず)を持ってもよい。調節要素938同様、リストフィールドは、所望の要素を選択するための矢印キーを持つ。任意の時間の現在要素は、枠組みの中にボールド体で、比較的大きなフォントで示される。リストフィールドはさらに、選択された要素について何が起こることが予想されるかを記載するアクションキーを含む。選択されたリスト要素の表示が直接押された場合には、もっとも起こりやすいアクションが実行される。
【0342】
装置が最初に使用される時、図17aに示すような、開始スクリーン920が示される。開始スクリーン920は、前述の図17bのスクリーンと完全には対応しない。開始スクリーンは、二つのクイックスタート・キー924、プロトコールキー922、および、装置設定および他の機能にアクセスするためのツールキー926を含む。開始スクリーンのキーが操作されると直ちに、ユーザーは対応メニューに指向される。
【0343】
クイックスタート・キー924は、最後に開始実行したプロトコール(左側キー)、および、最後の一つ前に実行したプロトコール(右側キー)を示す。二つを超えるクイックスタート・キーを与えてもよい。クイックスタート・キー924のキャプションは、一旦プロトコールが始まると変わる。あるプロトコールをクイックスタート・キーに割り当てなければならない場合、対応するクイックスタート・キー924を長期に操作することが可能である。
【0344】
プロトコールの個々の表示パラメータは変えることが可能である。適応した数組のパラメータを有するプロトコールを保存し、次いで、リストフィールドを用いて選択することが可能である。次に、パラメータ組を、オプションキーを用いて適応させることが可能である。
【0345】
例えば、図18aおよび18bは、プロトコールを起動するための典型的操作手順を示す。第1スクリーン920は、図17aに示す開始スクリーンである。クイックスタート・キーが押されると911、消耗品、およびプロトコールのためのその他の調製品を、装置に負荷するための指示946を持つ一つ以上のスクリーン940が現れる。
【0346】
表示のスクリーン940は、指定のプロトコールに、バッファー液用コンテナ710の各種位置942に必要な液体および液体レベル944を示す。図18aは、スクリーン940に概観を示す。ここでは、液体はカラーコードされ、必要な液体レベルはグラフ的に表示される。負荷状態に関する詳細な情報は、「次へ」キー(図示せず)を押すことによって獲得される。「スキップ」キーを押すと、ユーザーガイドのこの部分は飛ばされる。
【0347】
遠心蓋が開放されると直ちに、ユーザーインターフェイスも遠心機を負荷するための指示を表示する(図示せず)。
【0348】
図示の例では、「スキップ」キーが押される911.図18aに示す、それに続く第3スクリーン950は、実行されるプロトコール工程の概観を示す。工程は、進行バー951の要素として示される。表示のスクリーンには、下記のプロトコール工程が示される。初期化、分解、インキュベーション、分解、結合。スペースの理由で表示することができない他の工程は、別時期に示されるか、または、例えば、ドットなどの要素によって表示される(図示せず)。一方、その外の工程は、その要素に触れることによって表示させることが可能である。
【0349】
「編集」キーを用い、プロトコールの変動パラメータ、例えば、バッファーのタイプまたは量、二重幻視、開始カラム、RNアーゼ処理などを適応させることが可能である。開始キー911を押すことによって、プロトコールが開始される。
【0350】
プロコールが起動中に表示されるスクリーン950が図18bに示される。このスクリーンは、進行ディスプレイにおいて、残りの推定時間954、および、現実に活動しているプロトコール工程952を示す。プロトコールはいつでも停止させることが可能であるが、再び続けることはできない。中断キーは、緊急時オフボタンではない。各種方法は、最終プログラムが終了し、スピンドルがその開始位置に戻るまでは、終了されない。
【0351】
その外に、遠心機および振とう器は、プロトコールとは独立に、独自に操作することが可能である。これらの機能に対しては、例えば、図17aの開始スクリーンのツールメニュー926を用いて、または特別キーを用いてアクセスすることが可能である。
【0352】
開始スクリーン(図17aを参照)のツールボタン926を押した後、各種の装置設定を選択することが可能である。次に、下記の設定オプションを含むメニューが現れる。
−プロトコールとは独立に遠心機200を用いること;
−プロトコールとは独立に加熱および/または振とうすること;
−維持、例えば、可動部分の再設定;遠心蓋の開閉;
−設定、例えば、スクリーンの輝度、音信号;
−システム調節、例えば、ログファイル、装置特徴(シリアル番号、仕様など)、プレイの最新更新の保存;および、
−システム設定、例えば、温度、電圧、エラーメッセージなど。
【0353】
メニュー品目の順番は、使用頻度に依存してよい。ある機能の要求される頻度が高ければ高いほど、その機能はメニューにおいてより上に現れる。さらに、基本的に、「標準」キーの利用も可能である。このキーは、選択された要素について標準値を設定する。
【0354】
装置は、USBマスターとして構成されるUSBインターフェイス870cを持つ。これによって、データは、USBメモリースティックから読み取り、かつ、該スティックに書き込むことが可能である。したがって、USBメモリースティックは、PCと装置の間の媒体として活動することが可能である。それとは別に、さらに、イーサーネットまたはRS232などの別のインターフェイスも使用してよいし、かつ、Webサーバーなどの他の機能も実行してよい。
【0355】
下記のデータを、USBインターフェイスを用い、USBメモリースティックと交換してもよい。
−プロトコール(個々のプロトコール、またはいくつかのプロトコールを同時に負荷および保存すること);
−装置情報(例えば、診断情報、サービスデータまたはエラーデータを持つログファイル、状態ファイルなど)のセキュリティの確保;および、
−ファームウェアまたはソフトウェアの更新、である。
【0356】
それに加えて、プロトコールおよびその他のファイルを消去することが可能である(個々のプロトコール、またはいくつかのプロトコールを同時に)。プロトコールは、SPSアルゴリスムとして保護され、xmlファイルとして保存される。
【0357】
各タイプのファイル(例えば、負荷または保存されるプロトコール、ファームウェアなど)は、USBメモリースティックのインデックス構造と関連づけられる。該構造においてインデックスは指定の名前を示す。USBメモリースティックからの、または該スティックへのファイルの移送は、独自のメニューを与える、特別支援プログラムを用いて実行される。ユーザーは、標的装置において既に存在するファイルに上書きするか、または、まだ存在しないファイルだけを移送するかの選択を有する。
【0358】
装置が、特別サービスソフトウェアを備えたRS232インターフェイス870dを通じてPCに接続された場合、他のサービス機能を実行してもよい。
【0359】
操作は、もっとも一般的な応用のための、可能なもっとも容易な使用について設計される。その応用は、新規プロトコールの運用およびプロトコールの消去である。
【0360】
プロトコール
次に、前述の部分的モジュールを有する装置において生物試料を処理する際に実行してもよい部分的工程を、例示のプロトコールを参照しながら記載する。先ず、図18aに示すように、所望のプロトコールを探し、任意に、プロトコールパラメータを選択する。次に、装置は、該装置に負荷するための指示940を付与する。装置は、この指示にしたがって手動で負荷される。それとは別に、装置は、自動的、または部分自動的に負荷されてもよい。特に、
−消耗品ステーション701(図12参照)は、ピペッチチップ730、および、バッファー液712、714、716を含むコンテナなどの消耗品によって負荷される;
−遠心機200は、適切な容器ホールダー120および容器160、170によって負荷される;
−ヒーター/攪拌器600は、サンプル容器170によって負荷される。処理されるサンプルは、サンプル容器170に含まれる。
【0361】
それとは別に、負荷は、例えば、準備済みのステーション701、または、容器キャリヤ610を装置に挿入することによって実行されてもよい。
【0362】
次に、負荷は、一貫性と完全性に関して装置によってチェックされる。前述のように、チェックは、例えば、作業プラットフォームの上を移動可能な光センサー810を介して、および/または、超音波ユニット830を介して実行してもよい。さらに、他の方法パラメータ(例えば、処理されるサンプルの数から、検出されるサンプル容器170の数まで)もチェックから導き出すことが可能である。
【0363】
次に、プロトコール工程は、サンプルを処理するために実行される。例示として挙げると、細胞から得られた生体分子を精製するためのプロトコールの自動化実行、分解、ペレット化、結合、洗浄、および溶出の諸工程を含む実行が記載される。さらに、処理は、例えば、公刊物、「QIAGENベンチガイド」、「鋳型精製およびDNA配列決定のためのQIAGENガイド」、および「QIAGEN QIAprep(登録商標)Miniprepハンドブック」(第2版、2005年6月)に記載される、他のプロトコールを含んでもよい。その外、実行されるプロトコール工程は、前記工程の内のいくつかだけを含んでもよいし、または、それらに加えて、またはそれらの代わりに、他の工程を含んでもよい。
【0364】
分解工程のために、サンプル試料は、サンプル容器を備えたヒーター/攪拌器に、手動で、または、任意にグリッパー400を介して移送され、または、ピペットユニット500がサンプル試料に移送される。バッファー液が、サンプル試料にピペット注入される。例えば、ピペット注入プロセスの間、ピペットチップが汚染されないほどの十分な高さに確実にある限り、同じピペットチップを全てのサンプルのために使用してよい。
【0365】
ヒーター/攪拌器を振とうすることによって、バッファー液とサンプル試料を混ぜ合わせる。サンプルは、任意に、ヒーター/攪拌器で加熱することによって定められた温度に導かれ、かつ、任意の時間その温度に維持される(インキュベーション)。任意に、他のバッファー液が加えられる。ここで、所望の生体分子は、バッファー液に溶解する(分解産物)。
【0366】
次に、この分解産物が、図7を参照しながら前述したように、ピペット注入によって遠心機に移送される。各サンプルに対し個別のピペットチップが使用され、次に、廃棄物処分ステーション740において廃棄される。
【0367】
次に、任意に、ペレット形成工程が実行される。この工程では、サンプルは遠心され、分解産物と細胞デブリのより良い分離が実現される。サンプルは、ピペット注入によって、遠心機の容器に移送される。この容器は、保持位置140に保持されるエッペンドルフチューブ170であってもよいし、または、容器ホールダー120と一体化される容器150であってもよい(例えば、図11cを参照)。それとは別に、その中にサンプルを有するサンプル容器170は、グリッパー400によって、遠心機の保持位置140に移送されてもよい。次に、サンプルは、細胞デブリが、主に、容器の床に集まるように、遠心機200において遠心される。遠心の際、遠心機の蓋240は、蓋調節部260によって閉鎖される。次に、蓋は、遠心機の内部へのアクセスを可能とするために再び開放される。
【0368】
次に、結合工程が来る。この工程では、分解産物は、ピペット注入によって、フィルター容器160、または、担体試料、例えば、膜を含む容器160に移送される。細胞デブリの含量が増加した容器の基部に溜まった分解産物部分は移送されない。
【0369】
担体試料を含む容器160は、容器ホールダー120の保持位置130(または150)に置かれる。遠心によって、分解産物は、担体試料を貫いて、またはそって強制的に移動させられるが、生体分子は、好ましくは担体試料の上に残留する。残余の分解産物は、容器ホールダー120の廃棄物容量122の中に濯ぎこまれる(図11c参照)。
【0370】
次に、洗浄工程が実行される。ピペットユニット500を用いて、容器160に1種以上の洗浄液を添加した後、容器160を遠心して、担体試料を貫いて、またはそって洗浄液を強制的に移動させる。これによって、不要な成分が担体試料から除去される。溶解成分を含む洗浄液は、容器ホールダー120の廃棄物容量122の中に濯ぎこまれる。洗浄工程は任意に繰り返されてもよい。
【0371】
溶出工程を準備するために、容器160が移送される。一般に、かつ、他のプロトコール工程とは独立に、容器160は、溶出工程前に、グリッパーを用い、生物試料、特に、液体を受容するための別の容器170に移送される。好ましくは、容器は、グリッパー400を用いて輸送される。グリッパーは、図6、8、および/または9と関連して記載された特質の内のいくつか持つことが好ましい。別容器170が遠心機200に配置されることが特に好ましく、もっとも好ましくは、別容器170は、遠心機の容器ホールダー120の保持位置140の中に脱離可能に配置される。さらに、容器160は、溶液脱出のための流出口を持ち、かつ、容器160は、移送後、別容器170に対し、遠心時、容器160の流出口から流出した液体が全て、別容器170に収集されるように配置されることが好ましい。
【0372】
以後、非限定的拘束力において、移送される容器160は第1保持位置130に配置され、別容器170は、遠心機の容器ホールダー120の第2保持位置140に配置される(図11c参照)ものと仮定する。次に、プロトコールの他の工程とは独立に、グリッパーユニットによって、例えば、下記の通りに別容器に対し移送が実行される。グリッパーユニット400は、容器ホールダー120に対して相対的に位置決めされ、図8および9の記載において具体的に説明されるように、位置決め要素452は、容器ホールダーの位置決めカウンター要素124と相互作用を持つ。要すれば、グリッパー410は、ドライブ431によって軸436aの周囲に回旋され、それによって、グリッパーは容器160を把捉することが可能になる。グリッパーは、容器を把捉し、それを、保持位置130から除去する。グリッパーは、ドライブ431によって軸436aの周囲に回旋される。最後に、グリッパーは、容器160を、別容器170の中に設置し、該容器を解放する。この運動行程を通じて、位置決め要素452は、容器ホールダーの位置決めカウンター要素124と相互作用を持つことが好ましい。これは、例えば、バネ458によって確保することが可能である。
【0373】
それとは別に、容器160はさらに、第1容器ホールダー120の第1保持位置130から別容器170に移送することが可能である。この別容器は、第1容器ホールダー120とは異なる、遠心機の別の容器ホールダーに配置される。次に、この排除および挿入の間に、別の容器ホールダーに対してグリッパーユニットを位置決めすることから成るさらに別の工程が実行されなければならない。
【0374】
グリッパー410および、前述の運動に関するさらに詳細な説明が、図8および9に関連して上に示される。
【0375】
溶出工程のために、溶出液が、容器160に加えられ(ピペット注入)、容器160が遠心される。溶出液は、担体試料から所望の成分を溶解し、それを別容器の中に洗い流す。ここで、所望の成分は待機状態に維持され、溶出液に溶解される。
【0376】
最後に、最終の「整理」工程では、手順の中間工程のために使用された容器は、例えば、廃棄物処分ステーション740に運ばれることによって、手動または自動的に処分される。
【図面の簡単な説明】
【0377】
【図1a】図1aは、一実施態様における、ピペット廃棄ステーションを持つが、グリッパーユニットを持たない作業プレートの頂上図、ピペット廃棄ステーションの拡大図、および、グリッパーユニットを持ち、かつ開放した遠心機の蓋を持つ作業プレートの平面図を示す。
【図1b】図1bは、一実施態様における、ピペット廃棄ステーションを持つが、グリッパーユニットを持たない作業プレートの頂上図、ピペット廃棄ステーションの拡大図、および、グリッパーユニットを持ち、かつ開放した遠心機の蓋を持つ作業プレートの平面図を示す。
【図1c】図1cは、一実施態様における、ピペット廃棄ステーションを持つが、グリッパーユニットを持たない作業プレートの頂上図、ピペット廃棄ステーションの拡大図、および、グリッパーユニットを持ち、かつ開放した遠心機の蓋を持つ作業プレートの平面図を示す。
【図2a】図2aは、図1cおよびaの作業プレートを持つ実施態様の斜視図を示す。
【図2b】図2bは、図1cおよびaの作業プレートを持つ実施態様の斜視図を示す。
【図3a】図3aは、蓋を閉鎖した状態;蓋を開放した状態;蓋の蓋平板を排除した状態における、ある実施態様の遠心ユニットの斜視図を示す。
【図3b】図3bは、蓋を閉鎖した状態;蓋を開放した状態;蓋の蓋平板を排除した状態における、ある実施態様の遠心ユニットの斜視図を示す。
【図3c】図3cは、蓋を閉鎖した状態;蓋を開放した状態;蓋の蓋平板を排除した状態における、ある実施態様の遠心ユニットの斜視図を示す。
【図4】図4は、図3aの遠心ユニットを切断する、側方断面を示す。
【図5】図5a−cは、遠心機の遠心ローターの中に懸垂される容器ホールダー、および、容器ホールダーの最大回旋角度のためのストップを示す。
【図6】図6は、グリッパーおよびピペットユニットを備えた実施態様のグリッパースライドの斜視図を示す。
【図7】図7は、図6のピペットユニットの斜視図を示す。
【図8】図8は、図6のグリッパーユニットの斜視図を示す。
【図9】図9は、図8の、グリッパーユニットのグリッパーの斜視図を示す。
【図10】図10は、一実施態様の容器ホールダーの斜視図を示す。
【図11a−b】図11a−bは、一実施態様の容器ホールダーの側面図を示す。
【図11c−d】図11c−dは、一実施態様の容器ホールダーの側面図を示す。
【図12】図12は、一実施態様における、消費済み試料のための消費品物ステーションの斜視図を示す。
【図13】図13は、一実施態様における、加熱および攪拌のためのユニットの斜視図を示す。
【図14】図14a、bは、一実施態様における、加熱および攪拌のためのユニットの、それぞれ、側面図および平面図を示す。
【図15】図15は、一実施態様のセンサー機能および調節機能の、簡単模式図を示す。
【図16】図16は、一実施態様のセンサー機能および調節機能の、詳細模式図を示す。
【図17a】図17aは、一実施態様の、ユーザーガイド用画像スクリーンを示す。
【図17b】図17bは、一実施態様の、ユーザーガイド用画像スクリーンを示す。
【図18a】図18aは、ユーザーに対し、手順の選択、準備、および起動をガイドするための、ある実施態様の画像スクリーンを示す。
【図18b】図18bは、ユーザーに対し、手順の選択、準備、および起動をガイドするための、ある実施態様の画像スクリーンを示す。
【特許請求の範囲】
【請求項1】
開放位置と閉鎖位置を取ることが可能な蓋(166)を含む、生物試料の受容用容器(160)を取り扱うためのグリッパーユニット(400)であって、
前記容器を把捉し、かつ解除するためのグリッパー(410)、および、
蓋(166)が開放位置にある前記容器(160)に対し定められた位置に蓋(166)を保持するための蓋ホールダー(417a、414)、
を含む、グリッパーユニット。
【請求項2】
グリッパーユニットが、作業プラットフォームの平面に対して垂直なz方向に可動であることを特徴とする、請求項1によるグリッパーユニット(400)。
【請求項3】
グリッパーユニットが、作業プラットフォームの平面に沿うx−y方向に可動であることを特徴とする、請求項1または2によるグリッパーユニット(400)。
【請求項4】
請求項1から3の1項によるグリッパーユニット、および遠心機(200)を含み、前記グリッパー(410)が、遠心機に容器を設置するか、または、遠心機から容器を排除することが可能であることを特徴とする、生物試料の処理用装置。
【請求項5】
容器ホールダー(120)の中に、容器の閉鎖と開放のために蓋(166)を付着させた容器(160)を輸送するか、または、容器ホールダー(120)から容器を輸送するための方法であって、
グリッパーユニット(400)を介して容器(160)を把捉または保持すること;
蓋が開放位置にある容器(160)に対して定められた位置に蓋(166)を保持すること;および、
一方で、容器に対する蓋の定められた位置を維持しながら、グリッパーユニット(400)を介して容器ホールダーの中に、または容器ホールダーから容器を動かすこと、
から成る諸工程を含む方法。
【請求項6】
容器(160)の輸送が、グリッパーユニット(400)を介する、容器ホールダー(120)からの容器(160)の排除、および、容器ホールダーへの、または容器ホールダーからの容器の動きが、グリッパーによる容器ホールダーからの容器の排除であることを特徴とする、請求項5による、容器(160)を輸送するための方法。
【請求項7】
容器ホールダー(120)から容器を排除する工程が、容器ホールダーの蓋受容体(132、142、144)から蓋を排除することを含むことを特徴とする、請求項6による、容器(160)を輸送するための方法。
【請求項8】
容器(160)の輸送が、グリッパーユニット(400)を介して容器ホールダーの中に容器(160)を設置することであり、かつ、容器ホールダーへ、または容器ホールダーから容器を動かすことが、容器ホールダー(120)への容器の挿入であることを特徴とする、請求項5による、容器(160)を輸送するための方法。
【請求項9】
容器ホールダー(120)の中に容器を設置する工程が、容器ホールダーの蓋受容体(132、142、144)への蓋(166)の挿入を含むことを特徴とする、請求項8による、容器(160)を輸送するための方法。
【請求項10】
グリッパーユニット(400)を介して第1容器ホールダーから第2容器ホールダーへ容器(160)を輸送するための方法であって、
請求項6または7に従って第1容器ホールダー(120)から、第1容器ホールダー(120)の第1保持位置(130、140、150)から容器を排除すること、および、
請求項8または9に従って第2容器ホールダー(120)の中に、第2容器ホールダー(120)の第2保持位置(130、140、150)の中に容器を挿入すること、
から成る諸工程を含む方法。
【請求項11】
第1保持位置および第2保持位置が、異なる保持位置であり、かつ、第1容器ホールダーおよび第2容器ホールダーが、同じ容器ホールダーであることを特徴とする、請求項10による容器(160)を輸送するための方法。
【請求項12】
第1保持位置および第2保持位置が、異なる保持位置であり、かつ、第1容器ホールダーおよび第2容器ホールダーが、異なる容器ホールダーであることを特徴とする、請求項10または11による容器(160)を輸送するための方法。
【請求項13】
蓋(166)を保持する前記工程において、蓋(166)が、容器(160)に対して定められた位置においてグリッパーユニット(400)の蓋ホールダーによって保持されることを特徴とする、請求項5から12の1項による方法。
【請求項14】
一つの容器ホールダー、または複数のホールダーが、遠心機(200)に回旋的に登載されることを特徴とする、請求項5から13の1項による方法。
【請求項15】
蓋(166)が開放していることを特徴とする、請求項5から14の1項による方法。
【請求項16】
容器の閉鎖と開放のために容器に付着される蓋を有し、遠心機(200)において使用するのに好適な、生物試料受容用容器(160)のための容器ホールダー(120)であって、
容器を保持するための少なくとも一つの保持部材(130、140、150)、および、
容器に付着する蓋(166)を保持するためのもので、容器のためのグリッパーユニット(410)の蓋ホールダー(414)による、蓋へのアクセスを可能とする形状を持つ、少なくとも一つの蓋受容体(132、142、144)、
を少なくとも含む容器ホールダー(120)。
【請求項17】
蓋ホールダー(414)の、蓋へのアクセスが、蓋ホールダーによる蓋への機械的接触を含むことを特徴とする、請求項16による容器ホールダー。
【請求項18】
蓋受容体(132、142、144)が、蓋ホールダー(414)による蓋へのアクセスを可能とする陥凹(133、143、145)を有することを特徴とする、請求項16または17による容器ホールダー。
【請求項19】
生物試料処理用装置(1)であって、
請求項16から18の1項による容器ホールダー、および、
遠心機(200)を含み、
容器ホールダー(120)が、遠心機における使用に好適であることを特徴とする、装置(1)。
【請求項20】
生物試料処理用装置であって、
生物試料用容器(160)を保持するための、少なくとも一つの容器ホールダー(120)を有する、回転可能な遠心ローター(212)付き遠心機(200)、および、
容器ホールダーの中に容器(160)を挿入するためのグリッパー(410)、
を含む装置。
【請求項21】
生物試料処理用装置であって、
生物試料用容器(160)を保持するための、少なくとも一つの容器ホールダー(120)を有する、回転可能な遠心ローター(212)付き遠心機(200)、および、
容器ホールダーから容器(104)を排除するためのグリッパー(410)、
を含む装置。
【請求項22】
生物試料処理用装置であって、
生物試料用容器(160)を保持するための、少なくとも一つの容器ホールダー(120)を有する、回転可能な遠心ローター(212)付き遠心機(200)、および、
容器ホールダーの第1保持位置から、容器ホールダーの第2保持位置へ容器(104)を輸送するためのグリッパー(410)、
を含む装置。
【請求項23】
第1および第2保持位置が異なることを特徴とする、請求項20から22の1項による生物試料処理用装置。
【請求項24】
第1および第2保持位置が、同じ容器ホールダーの中にあることを特徴とする、請求項20から23の1項による生物試料処理用装置。
【請求項25】
第1および第2保持位置が、異なる容器ホールダーの中にあることを特徴とする、請求項20から23の1項による生物試料処理用装置。
【請求項26】
グリッパー(410)が、容器の突出容器部分(168)と嵌合することによって容器(160)を把捉するように構成されることを特徴とする、請求項20から25の1項による生物試料処理用装置。
【請求項27】
グリッパーが、カウンター位置決め要素(124)との相互作用によって、容器ホールダー(120)の角度位置または変位角を位置決めするための位置決め要素(450)を含むことを特徴とする、請求項20から26の1項による生物試料処理用装置。
【請求項28】
位置決め要素(450)が、変位角を位置決めするために、容器ホールダーに対するストップ(212m、116b)と協力するように構成されることを特徴とする、請求項27による生物試料処理用装置。
【請求項29】
容器ホールダーが、遠心機から排除可能であることを特徴とする、請求項20から28の1項による生物試料処理用装置。
【請求項30】
請求項20から29の1項による生物試料処理用装置であって、前記装置において、グリッパー(410)が、
−容器を把捉し、かつ解除するために動くことが可能なグリップ要素(416a)、
−グリップ要素(416a)をクランプするのに好適なクランプ要素(424)、
−リフト要素(422)、および、
−グリップ要素(416a)を動かす、リフト要素(422)の挙上運動を駆動するのに好適な、リフト要素用ドライブ(420)、
を含むことを特徴とする装置。
【請求項31】
遠心ローター(212)の容器ホールダー(120)であって、容器用保持位置(130、140、150)を有する容器ホールダー(120)の中に、グリッパー(410)を介して容器(160)を設置するための方法であって、下記の工程:
*グリッパーが、保持位置に対して所定の相対位置に運ばれること;
*保持位置に容器を設置するために、グリッパーを動かすこと;
*容器がグリッパーによって解除されること;
を含む方法。
【請求項32】
遠心ローター(212)の中の容器ホールダー(120)であって、容器用保持位置(130、140、150)を有する容器ホールダーから、グリッパー(410)を介して容器(160)を排除するための方法であって、下記の工程:
*グリッパーが、保持位置に対して所定の相対位置に運ばれること;
*容器がグリッパーによって把捉されること;
*保持位置から容器を排除するために、グリッパーを動かすこと;
を含む方法。
【請求項33】
遠心ローター(212)中の容器ホールダー(120)の第1保持位置(130、140、150)から、遠心ローター中の容器ホールダー(120)の第2保持位置(130、140、150)へ、グリッパー(410)を介して容器(104)を輸送するための方法であって、下記の工程:
*グリッパーが、第1保持位置に対して所定の相対位置に運ばれること;
*容器がグリッパーによって把捉されること;
*第1保持位置から容器を排除するために、グリッパーを動かすこと;
*グリッパーが、第2保持位置に対して所定の相対位置に運ばれること;
*第2保持位置に容器を設置するために、グリッパーを動かすこと;
*容器がグリッパーによって解除されること;
を含む方法。
【請求項34】
下記の工程:
*遠心ローター(212)の回転軸(214)の周囲における容器ホールダーの任意の回転角が調整されること、
をさらに含むことを特徴とする、請求項31から33の1項による方法。
【請求項35】
下記の工程:
*グリッパー(410)の位置決め要素(450)を、容器ホールダー(120)のカウンター位置決め要素(124)と相互作用させることによって、容器ホールダーの変位角が固定されること;容器ホールダーは、容器ホールダーの回旋運動に対するストップ(212m、116b)と接触すること、および、容器ホールダーの変位角は、ストップにおける位置決め要素(450)とカウンター位置決め要素(124)との相互作用によって固定されること、
をさらに含むことを特徴とする、請求項31から34の1項による方法。
【請求項36】
保持位置(130、140、150)が、遠心機(120)から排除が可能な容器ホールダーの中にあることを特徴とする、請求項31から35の1項による方法。
【請求項37】
容器(160)を把捉する工程が、下記の部分工程:
−リフト要素(422)の挙上運動を産生すること;および、
−リフト要素(422)の挙上運動を、グリップ要素(416a)の運動に変換することであって、クランプ要素(424)がグリップ要素に及ぼす力に対して反対方向の運動に変換すること、
を含むことを特徴とする、請求項31から36の1項による方法。
【請求項38】
容器(160)を解除する工程が、下記の部分工程:
−グリップ要素(416a)の開放方向の動きを可能とする、リフト要素(422)の挙上運動を産生すること;および、
−クランプ要素(424)を介してグリップ要素(416a)の運動を産生すること、
を含むことを特徴とする、請求項31から37の1項による方法。
【請求項39】
容器(160)を把捉する工程が、下記の部分工程:グリップ要素を、容器の突出容器部分(168)と嵌合させること、を含むことを特徴とする、請求項31から38の1項による方法。
【請求項40】
生物試料処理用装置(1)であって、
−ローター軸の周囲に回転可能な遠心ローター(212)、
−遠心ローターのためのドライブ(218)、および、
−位置決め要素(450)であって、ローターと共時回転可能なカウンター位置決め要素(124)と相互作用を持つことによって遠心ローターの角度位置を決めるために、ローターと共時回転しない位置決め要素(456)、
を含む装置(1)。
【請求項41】
角度位置の位置決めが、位置決め要素(450)とカウンター位置決め要素(124)との間の機械的嵌合によって実行されることを特徴とする、請求項27または40による装置。
【請求項42】
遠心ローターが、生物試料受容用容器(160)の容器ホールダー(120)を受容するのに好適であることを特徴とする、請求項40または41の1項による装置。
【請求項43】
カウンター位置決め要素(124)が、容器ホールダー(120)の上に、または遠心ローター(212)の上に配置されることを特徴とする、請求項27、または40から42の1項による装置。
【請求項44】
遠心ローターの角度位置を検出するのに好適であり、かつ、検出された角度位置の関数として位置決め要素(450)を、カウンター位置決め要素(124)の操作範囲内に納めるように軸合わせするのに好適であることを特徴とする、請求項27、または40から43の1項による装置。
【請求項45】
位置決め要素(450)が、容器ホールダー(120)の変位角を位置決めするのに好適であることを特徴とする、請求項40から44の1項による装置。
【請求項46】
遠心ローター(212)が、生物試料受容用容器(160)の容器ホールダー(120)の回旋性登載に好適であり、かつ、容器ホールダーの回旋運動のためのストップを含み、および、
前記位置決め要素(450)が、カウンター位置決め要素(124)と相互作用を持つことによって、ストップにおいて変位角において容器ホールダーを確保するのに好適であることを特徴とする、請求項27、または40から45の1項による装置。
【請求項47】
遠心ローターの回転軸(214)周囲の回転角において遠心機(200)の遠心ローター(212)の位置決めをするための方法であって、下記の工程:
−遠心ローターと共時回転可能なカウンター位置決め要素(124)が、遠心ローターと共時回転しない位置決め要素(452)と相互作用を持つための操作範囲内に運ばれること、および、
−遠心ローター(212)が、位置決め要素の、カウンター位置決め要素との相互作用によって位置決めされること、
を含む方法。
【請求項48】
遠心ローター(212)の、その回転軸(214)周囲の角度位置を、ある角度間隔において選択することによって、前記カウンター位置決め要素(124)が、位置決め要素(452)との相互作用を持つ操作範囲内に運ばれ、それによって、カウンター位置決め要素が、前記操作範囲内に置かれることを特徴とする、請求項47による遠心ローター(212)を位置決めするための方法。
【請求項49】
カウンター位置決め要素(124)が、位置決め要素(452)との相互作用を持つ操作範囲内に運ばれることが、下記の工程:
−遠心ローター(212)の、その回転軸(214)周囲の角度位置が検出されること、および、
−位置決め要素(450)が、検出された角度位置の関数として軸合わせされ、それによって操作範囲内に置かれること、
によって実行されることを特徴とする、請求項47または48による、遠心ローター(212)の位置決め用方法。
【請求項50】
遠心ローター(212)の位置決めの結果、遠心ローターの回転軸(214)周囲における、遠心ローター(212)中の容器(160)の保持位置(130、140、150)の回転角度が確立されることを特徴とする、請求項47から49の1項による遠心ローター(212)の位置決め用方法。
【請求項51】
生物試料処理用装置(1)であって、
−生物試料受容用容器(160)のための容器ホールダー(120)の回旋性登載に好適な、ローター軸(214)の周囲に回転可能な遠心ローター(212)、
−容器ホールダーの回旋運動のための第1ストップ、および、
−位置決め要素(450)であって、容器ホールダーのカウンター位置決め要素(124)と相互作用を持つことによって、ストップにおいて変位角において容器ホールダーを確保するのに好適な位置決め要素(450)、
を含む装置(1)。
【請求項52】
遠心ローターが、遠心ローターの遠心力によって引き起こされる回旋運動のための第2ストップを含むことを特徴とする、請求項27、28、46、または51による装置。
【請求項53】
第1および/または第2ストップが、遠心ローターに登載されることを特徴とする、請求項28、46、または51から52の1項による装置。
【請求項54】
位置決めが、第1ストップに対し容器ホールダーを押しつけることによって実行されることを特徴とする、請求項28、46、または51から53の1項による装置。
【請求項55】
遠心ローター(212)に回旋的に登載される、生物試料受容用容器(160)のための容器ホールダー(120)の変位角を位置決めするための方法であって、下記の工程:
−位置決め要素(450)が、容器ホールダー(120)のカウンター位置決め要素(124)と相互作用を持つようにさせられること、
−容器ホールダーが、容器ホールダーの回旋運動のためのストップ(212m、116b)と接触すること、および、
−容器ホールダーの変位角が、ストップにおける、位置決め要素(450)とカウンター位置決め要素(124)の相互作用によって位置決めされること、
を含む方法。
【請求項56】
遠心機(200)において使用するのに好適な、生物試料受容用容器(160)のための容器ホールダー(120)であって、
容器を保持するための保持部材(130、140、150)、および、
位置決め要素(450)と嵌合する形状を持つカウンター位置決め要素(124)を含み、
嵌合を介して、遠心機における容器ホールダーの角度位置および/または変位角の位置決めが可能とされる、
ことを特徴とする、前記容器ホールダー(120)。
【請求項57】
遠心機に容器ホールダーを接続するのに好適な接続部材(112a)をさらに含むことを特徴とする、請求項56による容器ホールダー。
【請求項58】
接続部材が、容器ホールダー(120)の回旋軸(113)を定めることを特徴とする、請求項57による容器ホールダー。
【請求項59】
カウンター位置決め要素(124)と位置決め要素(450)の間の嵌合が、少なくとも一つの平面の方向において、カウンター位置決め要素(124)と位置決め要素(450)の間の相対的運動を阻止するのに好適であることを特徴とする、請求項56から58の1項による容器ホールダー。
【請求項60】
生物試料処理用装置(1)であって、
−認識性を向上させた、少なくとも一つの容器部分を含む、生物試料受容用容器(160、170、730)のためのホールダー(120)、
−認識性を向上させた容器部分と関連する、ホールダーの記録域を照射するための放射線源(810b)、
−記録域から到来する放射線の強度を測定するためのセンサー(810a)、
−測定された強度と、定められた閾値との間で比較を実行することによって容器の有無を記録するように装備される評価ユニット、
を含む装置(1)。
【請求項61】
容器が、遠心容器(160、170)、フィルター容器(160)、収集容器(170)、またはピペットチップ(730)であることを特徴とする、請求項60による装置。
【請求項62】
認識性を向上させた、容器部分が、膜、フィルター、フィルター膜、蓋ヒンジ、および/または容器の蓋であることを特徴とする、請求項60または61による装置。
【請求項63】
センサー(810a)が可動性であることを特徴とする、請求項60から62の1項による装置。
【請求項64】
装置の上の調整マークを照射し、かつ、調整マークから到来する放射線を測定することによって、センサー(810a)の位置を決めるのに好適な、請求項63による装置。
【請求項65】
評価ユニットが、閾値を下回る測定強度に対しては不在を記録し、閾値を上回る測定強度の対しては存在を記録するように装備されることを特徴とする、請求項60から64の1項による装置。
【請求項66】
放射線源およびセンサーが共時可動性であり、装置が、保持域に対して放射線源およびセンサーを位置決めするための位置決め手段をさらに含むことを特徴とする、請求項60から65の1項による装置。
【請求項67】
容器用ホールダーにおける、生物試料を受容するための容器(160、170、730)の有無を検出するための方法であって、下記の工程:
−認識性を向上させた容器部分と関連する、ホールダー中の記録域が照射されること;
−記録域から到来する放射線の強度を測定すること;
−測定強度と、定められた閾値との間の比較を通じて容器の有無が記録されること、
を含む方法。
【請求項68】
照射および測定が、可動性センサーユニットを用いて実行される、請求項67による方法であって、下記の工程:
センサーユニットが、容器ホールダーに対し相対的に位置決めされること、
をさらに含む方法。
【請求項69】
生物試料処理用装置であって、
−生物試料用容器(160、170、712、714、716)を受容するための容器ホールダー;
−超音波源(830b)および超音波センサー(830a)を有するセンサーユニット;および、
−超音波ユニットのセンサーデータの関数として容器の開放状態を決定し、かつ、超音波センサーのセンサーデータの関数として、容器が開放している場合、容器における物質の可能な存在を決定するための評価ユニット、
を含む装置。
【請求項70】
物質が液体であることを特徴とする、請求項69による装置。
【請求項71】
評価ユニットが、超音波センサー(830a)のセンサーデータの関数として物質の充填レベルを決めるのに好適であることを特徴とする、請求項69または70による装置。
【請求項72】
評価ユニットが、発射超音波信号と、物質の表面から反射される超音波信号との間の移動時間を測定することによって、物質の充填レベルを決めるのに好適であることを特徴とする、請求項69から71の1項による装置。
【請求項73】
センサーユニットが可動性であり、かつ、
放射線センサー(810a)、および、
放射線センサーのセンサーデータの関数として、容器に対してセンサーユニットを位置決めするための位置決め手段(316、326)、
をさらに含むことを特徴とする、請求項69から72の1項による装置。
【請求項74】
放射線センサー(810a)が、容器の存在を決めるのに好適であることを特徴とする、請求項73による装置。
【請求項75】
−容器が、認識性を向上させた少なくとも一部分を有し;かつ、
−センサーユニットが、認識性を向上させた容器部分と関連する、ホールダー中の記録域を照射するための放射線源を有し;かつ、
−放射線センサーが、記録域から到来する放射線の強度を測定するのに好適であり;かつ、
−評価ユニットが、測定強度を定められた閾値と比較することによって容器の有無を記録するように装備される、
ことを特徴とする、請求項74による装置。
【請求項76】
生物試料処理用装置(1)であって、
−補給分の容器(730)を保管するためのコンテナステーション(720);
−容器の性質に関する情報を含む、コンテナステーション上のマーキング(721、722);および、
−マーキングを読み取るための放射線センサー(810a)
を含む装置。
【請求項77】
マーキング(721、722)が、コンテナステーションと一体的に形成される、少なくとも一つのマーキング要素を含むことを特徴とする、請求項76による装置。
【請求項78】
マーキング(721、722)が、それぞれが二進情報を含む、少なくとも二つのマーキング要素を含むことを特徴とする、請求項76または77による装置。
【請求項79】
コンテナステーションが、異なる方向において装置に設置可能であることを特徴とする、請求項76から78の1項による装置。
【請求項80】
マーキング(721、722)は、マーキングの読み取りが、様々な方向性の中から選ばれる任意の一つの方向性から独立するように構成されることを特徴とする、請求項76から79の1項による装置。
【請求項81】
マーキングを照射するための放射線源をさらに含むことを特徴とする、請求項76から80の1項による装置。
【請求項82】
コンテナステーションが、それぞれが一容器のための、複数の容器位置を含み、
−各容器が、認識性を向上させた少なくとも一部分を有し;かつ、
−放射線源(810b)が、認識性を向上させた特定の容器部分と関連し;かつ、
−放射線センサー(810a)が、照射された記録域から到来する放射線の強度を測定するのに好適であり;かつ、
−評価ユニットが、測定強度と、定められた閾値との間の比較を実行することによって容器の有無を記録するように装備される、
ことを特徴とする、請求項81による装置。
【請求項83】
容器(730)がピペットチップであることを特徴とする、請求項76から82の1項による装置。
【請求項84】
容器の性質に関する情報が、ピペットチップの容量、またはピペットチップの試料に関する情報であることを特徴とする、請求項76から83の1項による装置。
【請求項85】
光学センサー(810a)および放射線源(810b)が、光センサー(810)の部分であることを特徴とする、請求項81から84の1項による装置。
【請求項86】
マーキングを読み取るために、
−放射線源(810b)を介してマーキングのマーキング要素を照射すること;
−センサー(810a)を介してマーキング要素から到来する放射線の強度を測定すること;および、
−測定された強度を、その強度に対する任意の閾値と比較すること、
を実現するように設計される、請求項81から85の1項による装置。
【請求項87】
容器用コンテナステーション(720)において生物試料受容用容器(730)の性質を認識するための方法であって、下記の工程:
−容器の性質に関する情報を含む、コンテナステーション上の第1マーキング(721)が照射され、かつ、第1マーキングから到来する第1強度が測定されること;
−容器の性質が、測定された第1強度の関数として記録されること、
を含む方法。
【請求項88】
下記の工程:
−容器の性質に関する情報を含む、コンテナステーション上の第2マーキング(722)が照射され、かつ、第2マーキングから到来する第2強度が測定されること;および、
−容器の性質が、測定された第1および第2強度の関数として記録されること、
をさらに含むことを特徴とする、請求項87による方法。
【請求項89】
それぞれ少なくとも一つの生物試料用容器(160、170)のための、複数の容器保持位置(120、130、140、150)を有する遠心機(200)の占拠をチェックするための方法であって、下記の工程:
−容器保持位置について、その中に容器が存在するかどうかが記録されること;
−容器保持位置において存在と記録された容器の全数が保存されること;
−容器保持位置において存在と記録された容器の全数の関数として、容器保持位置における容器の分布に対する少なくとも一つの条件が決められること;
−容器保持位置において存在と記録された容器の分布が条件を満たすかどうかに関してチェックが為されること、
を含む方法。
【請求項90】
容器が、容器保持位置の中に存在するかどうかを記録するためにセンサーが使用される、請求項89による方法であって、下記の工程:
−サンプル容器位置(612)におけるサンプル容器(170)の数が記録される、
をさらに含む方法。
【請求項91】
下記の工程:
−サンプル容器(170)の数が、存在と記録された容器の全数と適合可能であるかどうかに関してチェックが為されること、
をさらに含むことを特徴とする、請求項90による方法。
【請求項92】
下記の工程:
−各場合において、サンプル(170)と、容器保持位置(120、130、140、150)の間に関連が確立されること、
をさらに含むことを特徴とする、請求項89から91の1項による方法。
【請求項93】
関連づけは、一つ以上の容器保持位置(130、14、150)から成る一群(120)に、各サンプル容器を関連づけること、但し、あるひとつの容器は上記群の中の少なくとも一つの容器保持位置において存在すると記録される、を特徴とする、請求項92による方法。
【請求項94】
関連づけは、容器保持位置に関連づけられたサンプル容器位置に、サンプル容器を運ぶようにとの指示を発することによって確立されることを特徴とする、請求項92または93の1項による方法。
【請求項95】
サンプル容器位置は、サンプル容器ステーション中のサンプル容器位置の配置は、遠心機中の容器保持位置の配置に対応するという事実によって、容器保持位置に関連づけられることを特徴とする、請求項92から94の1項による方法。
【請求項96】
関連づけは、サンプル容器のサンプル容器位置に各容器保持位置を割り当てる表を作成することによって確立されることを特徴とする、請求項92から95の1項による方法。
【請求項97】
サンプル容器位置が、サンプル容器のための攪拌器および/またはヒーター(600)の中にあることを特徴とする、請求項89から96の1項による方法。
【請求項1】
開放位置と閉鎖位置を取ることが可能な蓋(166)を含む、生物試料の受容用容器(160)を取り扱うためのグリッパーユニット(400)であって、
前記容器を把捉し、かつ解除するためのグリッパー(410)、および、
蓋(166)が開放位置にある前記容器(160)に対し定められた位置に蓋(166)を保持するための蓋ホールダー(417a、414)、
を含む、グリッパーユニット。
【請求項2】
グリッパーユニットが、作業プラットフォームの平面に対して垂直なz方向に可動であることを特徴とする、請求項1によるグリッパーユニット(400)。
【請求項3】
グリッパーユニットが、作業プラットフォームの平面に沿うx−y方向に可動であることを特徴とする、請求項1または2によるグリッパーユニット(400)。
【請求項4】
請求項1から3の1項によるグリッパーユニット、および遠心機(200)を含み、前記グリッパー(410)が、遠心機に容器を設置するか、または、遠心機から容器を排除することが可能であることを特徴とする、生物試料の処理用装置。
【請求項5】
容器ホールダー(120)の中に、容器の閉鎖と開放のために蓋(166)を付着させた容器(160)を輸送するか、または、容器ホールダー(120)から容器を輸送するための方法であって、
グリッパーユニット(400)を介して容器(160)を把捉または保持すること;
蓋が開放位置にある容器(160)に対して定められた位置に蓋(166)を保持すること;および、
一方で、容器に対する蓋の定められた位置を維持しながら、グリッパーユニット(400)を介して容器ホールダーの中に、または容器ホールダーから容器を動かすこと、
から成る諸工程を含む方法。
【請求項6】
容器(160)の輸送が、グリッパーユニット(400)を介する、容器ホールダー(120)からの容器(160)の排除、および、容器ホールダーへの、または容器ホールダーからの容器の動きが、グリッパーによる容器ホールダーからの容器の排除であることを特徴とする、請求項5による、容器(160)を輸送するための方法。
【請求項7】
容器ホールダー(120)から容器を排除する工程が、容器ホールダーの蓋受容体(132、142、144)から蓋を排除することを含むことを特徴とする、請求項6による、容器(160)を輸送するための方法。
【請求項8】
容器(160)の輸送が、グリッパーユニット(400)を介して容器ホールダーの中に容器(160)を設置することであり、かつ、容器ホールダーへ、または容器ホールダーから容器を動かすことが、容器ホールダー(120)への容器の挿入であることを特徴とする、請求項5による、容器(160)を輸送するための方法。
【請求項9】
容器ホールダー(120)の中に容器を設置する工程が、容器ホールダーの蓋受容体(132、142、144)への蓋(166)の挿入を含むことを特徴とする、請求項8による、容器(160)を輸送するための方法。
【請求項10】
グリッパーユニット(400)を介して第1容器ホールダーから第2容器ホールダーへ容器(160)を輸送するための方法であって、
請求項6または7に従って第1容器ホールダー(120)から、第1容器ホールダー(120)の第1保持位置(130、140、150)から容器を排除すること、および、
請求項8または9に従って第2容器ホールダー(120)の中に、第2容器ホールダー(120)の第2保持位置(130、140、150)の中に容器を挿入すること、
から成る諸工程を含む方法。
【請求項11】
第1保持位置および第2保持位置が、異なる保持位置であり、かつ、第1容器ホールダーおよび第2容器ホールダーが、同じ容器ホールダーであることを特徴とする、請求項10による容器(160)を輸送するための方法。
【請求項12】
第1保持位置および第2保持位置が、異なる保持位置であり、かつ、第1容器ホールダーおよび第2容器ホールダーが、異なる容器ホールダーであることを特徴とする、請求項10または11による容器(160)を輸送するための方法。
【請求項13】
蓋(166)を保持する前記工程において、蓋(166)が、容器(160)に対して定められた位置においてグリッパーユニット(400)の蓋ホールダーによって保持されることを特徴とする、請求項5から12の1項による方法。
【請求項14】
一つの容器ホールダー、または複数のホールダーが、遠心機(200)に回旋的に登載されることを特徴とする、請求項5から13の1項による方法。
【請求項15】
蓋(166)が開放していることを特徴とする、請求項5から14の1項による方法。
【請求項16】
容器の閉鎖と開放のために容器に付着される蓋を有し、遠心機(200)において使用するのに好適な、生物試料受容用容器(160)のための容器ホールダー(120)であって、
容器を保持するための少なくとも一つの保持部材(130、140、150)、および、
容器に付着する蓋(166)を保持するためのもので、容器のためのグリッパーユニット(410)の蓋ホールダー(414)による、蓋へのアクセスを可能とする形状を持つ、少なくとも一つの蓋受容体(132、142、144)、
を少なくとも含む容器ホールダー(120)。
【請求項17】
蓋ホールダー(414)の、蓋へのアクセスが、蓋ホールダーによる蓋への機械的接触を含むことを特徴とする、請求項16による容器ホールダー。
【請求項18】
蓋受容体(132、142、144)が、蓋ホールダー(414)による蓋へのアクセスを可能とする陥凹(133、143、145)を有することを特徴とする、請求項16または17による容器ホールダー。
【請求項19】
生物試料処理用装置(1)であって、
請求項16から18の1項による容器ホールダー、および、
遠心機(200)を含み、
容器ホールダー(120)が、遠心機における使用に好適であることを特徴とする、装置(1)。
【請求項20】
生物試料処理用装置であって、
生物試料用容器(160)を保持するための、少なくとも一つの容器ホールダー(120)を有する、回転可能な遠心ローター(212)付き遠心機(200)、および、
容器ホールダーの中に容器(160)を挿入するためのグリッパー(410)、
を含む装置。
【請求項21】
生物試料処理用装置であって、
生物試料用容器(160)を保持するための、少なくとも一つの容器ホールダー(120)を有する、回転可能な遠心ローター(212)付き遠心機(200)、および、
容器ホールダーから容器(104)を排除するためのグリッパー(410)、
を含む装置。
【請求項22】
生物試料処理用装置であって、
生物試料用容器(160)を保持するための、少なくとも一つの容器ホールダー(120)を有する、回転可能な遠心ローター(212)付き遠心機(200)、および、
容器ホールダーの第1保持位置から、容器ホールダーの第2保持位置へ容器(104)を輸送するためのグリッパー(410)、
を含む装置。
【請求項23】
第1および第2保持位置が異なることを特徴とする、請求項20から22の1項による生物試料処理用装置。
【請求項24】
第1および第2保持位置が、同じ容器ホールダーの中にあることを特徴とする、請求項20から23の1項による生物試料処理用装置。
【請求項25】
第1および第2保持位置が、異なる容器ホールダーの中にあることを特徴とする、請求項20から23の1項による生物試料処理用装置。
【請求項26】
グリッパー(410)が、容器の突出容器部分(168)と嵌合することによって容器(160)を把捉するように構成されることを特徴とする、請求項20から25の1項による生物試料処理用装置。
【請求項27】
グリッパーが、カウンター位置決め要素(124)との相互作用によって、容器ホールダー(120)の角度位置または変位角を位置決めするための位置決め要素(450)を含むことを特徴とする、請求項20から26の1項による生物試料処理用装置。
【請求項28】
位置決め要素(450)が、変位角を位置決めするために、容器ホールダーに対するストップ(212m、116b)と協力するように構成されることを特徴とする、請求項27による生物試料処理用装置。
【請求項29】
容器ホールダーが、遠心機から排除可能であることを特徴とする、請求項20から28の1項による生物試料処理用装置。
【請求項30】
請求項20から29の1項による生物試料処理用装置であって、前記装置において、グリッパー(410)が、
−容器を把捉し、かつ解除するために動くことが可能なグリップ要素(416a)、
−グリップ要素(416a)をクランプするのに好適なクランプ要素(424)、
−リフト要素(422)、および、
−グリップ要素(416a)を動かす、リフト要素(422)の挙上運動を駆動するのに好適な、リフト要素用ドライブ(420)、
を含むことを特徴とする装置。
【請求項31】
遠心ローター(212)の容器ホールダー(120)であって、容器用保持位置(130、140、150)を有する容器ホールダー(120)の中に、グリッパー(410)を介して容器(160)を設置するための方法であって、下記の工程:
*グリッパーが、保持位置に対して所定の相対位置に運ばれること;
*保持位置に容器を設置するために、グリッパーを動かすこと;
*容器がグリッパーによって解除されること;
を含む方法。
【請求項32】
遠心ローター(212)の中の容器ホールダー(120)であって、容器用保持位置(130、140、150)を有する容器ホールダーから、グリッパー(410)を介して容器(160)を排除するための方法であって、下記の工程:
*グリッパーが、保持位置に対して所定の相対位置に運ばれること;
*容器がグリッパーによって把捉されること;
*保持位置から容器を排除するために、グリッパーを動かすこと;
を含む方法。
【請求項33】
遠心ローター(212)中の容器ホールダー(120)の第1保持位置(130、140、150)から、遠心ローター中の容器ホールダー(120)の第2保持位置(130、140、150)へ、グリッパー(410)を介して容器(104)を輸送するための方法であって、下記の工程:
*グリッパーが、第1保持位置に対して所定の相対位置に運ばれること;
*容器がグリッパーによって把捉されること;
*第1保持位置から容器を排除するために、グリッパーを動かすこと;
*グリッパーが、第2保持位置に対して所定の相対位置に運ばれること;
*第2保持位置に容器を設置するために、グリッパーを動かすこと;
*容器がグリッパーによって解除されること;
を含む方法。
【請求項34】
下記の工程:
*遠心ローター(212)の回転軸(214)の周囲における容器ホールダーの任意の回転角が調整されること、
をさらに含むことを特徴とする、請求項31から33の1項による方法。
【請求項35】
下記の工程:
*グリッパー(410)の位置決め要素(450)を、容器ホールダー(120)のカウンター位置決め要素(124)と相互作用させることによって、容器ホールダーの変位角が固定されること;容器ホールダーは、容器ホールダーの回旋運動に対するストップ(212m、116b)と接触すること、および、容器ホールダーの変位角は、ストップにおける位置決め要素(450)とカウンター位置決め要素(124)との相互作用によって固定されること、
をさらに含むことを特徴とする、請求項31から34の1項による方法。
【請求項36】
保持位置(130、140、150)が、遠心機(120)から排除が可能な容器ホールダーの中にあることを特徴とする、請求項31から35の1項による方法。
【請求項37】
容器(160)を把捉する工程が、下記の部分工程:
−リフト要素(422)の挙上運動を産生すること;および、
−リフト要素(422)の挙上運動を、グリップ要素(416a)の運動に変換することであって、クランプ要素(424)がグリップ要素に及ぼす力に対して反対方向の運動に変換すること、
を含むことを特徴とする、請求項31から36の1項による方法。
【請求項38】
容器(160)を解除する工程が、下記の部分工程:
−グリップ要素(416a)の開放方向の動きを可能とする、リフト要素(422)の挙上運動を産生すること;および、
−クランプ要素(424)を介してグリップ要素(416a)の運動を産生すること、
を含むことを特徴とする、請求項31から37の1項による方法。
【請求項39】
容器(160)を把捉する工程が、下記の部分工程:グリップ要素を、容器の突出容器部分(168)と嵌合させること、を含むことを特徴とする、請求項31から38の1項による方法。
【請求項40】
生物試料処理用装置(1)であって、
−ローター軸の周囲に回転可能な遠心ローター(212)、
−遠心ローターのためのドライブ(218)、および、
−位置決め要素(450)であって、ローターと共時回転可能なカウンター位置決め要素(124)と相互作用を持つことによって遠心ローターの角度位置を決めるために、ローターと共時回転しない位置決め要素(456)、
を含む装置(1)。
【請求項41】
角度位置の位置決めが、位置決め要素(450)とカウンター位置決め要素(124)との間の機械的嵌合によって実行されることを特徴とする、請求項27または40による装置。
【請求項42】
遠心ローターが、生物試料受容用容器(160)の容器ホールダー(120)を受容するのに好適であることを特徴とする、請求項40または41の1項による装置。
【請求項43】
カウンター位置決め要素(124)が、容器ホールダー(120)の上に、または遠心ローター(212)の上に配置されることを特徴とする、請求項27、または40から42の1項による装置。
【請求項44】
遠心ローターの角度位置を検出するのに好適であり、かつ、検出された角度位置の関数として位置決め要素(450)を、カウンター位置決め要素(124)の操作範囲内に納めるように軸合わせするのに好適であることを特徴とする、請求項27、または40から43の1項による装置。
【請求項45】
位置決め要素(450)が、容器ホールダー(120)の変位角を位置決めするのに好適であることを特徴とする、請求項40から44の1項による装置。
【請求項46】
遠心ローター(212)が、生物試料受容用容器(160)の容器ホールダー(120)の回旋性登載に好適であり、かつ、容器ホールダーの回旋運動のためのストップを含み、および、
前記位置決め要素(450)が、カウンター位置決め要素(124)と相互作用を持つことによって、ストップにおいて変位角において容器ホールダーを確保するのに好適であることを特徴とする、請求項27、または40から45の1項による装置。
【請求項47】
遠心ローターの回転軸(214)周囲の回転角において遠心機(200)の遠心ローター(212)の位置決めをするための方法であって、下記の工程:
−遠心ローターと共時回転可能なカウンター位置決め要素(124)が、遠心ローターと共時回転しない位置決め要素(452)と相互作用を持つための操作範囲内に運ばれること、および、
−遠心ローター(212)が、位置決め要素の、カウンター位置決め要素との相互作用によって位置決めされること、
を含む方法。
【請求項48】
遠心ローター(212)の、その回転軸(214)周囲の角度位置を、ある角度間隔において選択することによって、前記カウンター位置決め要素(124)が、位置決め要素(452)との相互作用を持つ操作範囲内に運ばれ、それによって、カウンター位置決め要素が、前記操作範囲内に置かれることを特徴とする、請求項47による遠心ローター(212)を位置決めするための方法。
【請求項49】
カウンター位置決め要素(124)が、位置決め要素(452)との相互作用を持つ操作範囲内に運ばれることが、下記の工程:
−遠心ローター(212)の、その回転軸(214)周囲の角度位置が検出されること、および、
−位置決め要素(450)が、検出された角度位置の関数として軸合わせされ、それによって操作範囲内に置かれること、
によって実行されることを特徴とする、請求項47または48による、遠心ローター(212)の位置決め用方法。
【請求項50】
遠心ローター(212)の位置決めの結果、遠心ローターの回転軸(214)周囲における、遠心ローター(212)中の容器(160)の保持位置(130、140、150)の回転角度が確立されることを特徴とする、請求項47から49の1項による遠心ローター(212)の位置決め用方法。
【請求項51】
生物試料処理用装置(1)であって、
−生物試料受容用容器(160)のための容器ホールダー(120)の回旋性登載に好適な、ローター軸(214)の周囲に回転可能な遠心ローター(212)、
−容器ホールダーの回旋運動のための第1ストップ、および、
−位置決め要素(450)であって、容器ホールダーのカウンター位置決め要素(124)と相互作用を持つことによって、ストップにおいて変位角において容器ホールダーを確保するのに好適な位置決め要素(450)、
を含む装置(1)。
【請求項52】
遠心ローターが、遠心ローターの遠心力によって引き起こされる回旋運動のための第2ストップを含むことを特徴とする、請求項27、28、46、または51による装置。
【請求項53】
第1および/または第2ストップが、遠心ローターに登載されることを特徴とする、請求項28、46、または51から52の1項による装置。
【請求項54】
位置決めが、第1ストップに対し容器ホールダーを押しつけることによって実行されることを特徴とする、請求項28、46、または51から53の1項による装置。
【請求項55】
遠心ローター(212)に回旋的に登載される、生物試料受容用容器(160)のための容器ホールダー(120)の変位角を位置決めするための方法であって、下記の工程:
−位置決め要素(450)が、容器ホールダー(120)のカウンター位置決め要素(124)と相互作用を持つようにさせられること、
−容器ホールダーが、容器ホールダーの回旋運動のためのストップ(212m、116b)と接触すること、および、
−容器ホールダーの変位角が、ストップにおける、位置決め要素(450)とカウンター位置決め要素(124)の相互作用によって位置決めされること、
を含む方法。
【請求項56】
遠心機(200)において使用するのに好適な、生物試料受容用容器(160)のための容器ホールダー(120)であって、
容器を保持するための保持部材(130、140、150)、および、
位置決め要素(450)と嵌合する形状を持つカウンター位置決め要素(124)を含み、
嵌合を介して、遠心機における容器ホールダーの角度位置および/または変位角の位置決めが可能とされる、
ことを特徴とする、前記容器ホールダー(120)。
【請求項57】
遠心機に容器ホールダーを接続するのに好適な接続部材(112a)をさらに含むことを特徴とする、請求項56による容器ホールダー。
【請求項58】
接続部材が、容器ホールダー(120)の回旋軸(113)を定めることを特徴とする、請求項57による容器ホールダー。
【請求項59】
カウンター位置決め要素(124)と位置決め要素(450)の間の嵌合が、少なくとも一つの平面の方向において、カウンター位置決め要素(124)と位置決め要素(450)の間の相対的運動を阻止するのに好適であることを特徴とする、請求項56から58の1項による容器ホールダー。
【請求項60】
生物試料処理用装置(1)であって、
−認識性を向上させた、少なくとも一つの容器部分を含む、生物試料受容用容器(160、170、730)のためのホールダー(120)、
−認識性を向上させた容器部分と関連する、ホールダーの記録域を照射するための放射線源(810b)、
−記録域から到来する放射線の強度を測定するためのセンサー(810a)、
−測定された強度と、定められた閾値との間で比較を実行することによって容器の有無を記録するように装備される評価ユニット、
を含む装置(1)。
【請求項61】
容器が、遠心容器(160、170)、フィルター容器(160)、収集容器(170)、またはピペットチップ(730)であることを特徴とする、請求項60による装置。
【請求項62】
認識性を向上させた、容器部分が、膜、フィルター、フィルター膜、蓋ヒンジ、および/または容器の蓋であることを特徴とする、請求項60または61による装置。
【請求項63】
センサー(810a)が可動性であることを特徴とする、請求項60から62の1項による装置。
【請求項64】
装置の上の調整マークを照射し、かつ、調整マークから到来する放射線を測定することによって、センサー(810a)の位置を決めるのに好適な、請求項63による装置。
【請求項65】
評価ユニットが、閾値を下回る測定強度に対しては不在を記録し、閾値を上回る測定強度の対しては存在を記録するように装備されることを特徴とする、請求項60から64の1項による装置。
【請求項66】
放射線源およびセンサーが共時可動性であり、装置が、保持域に対して放射線源およびセンサーを位置決めするための位置決め手段をさらに含むことを特徴とする、請求項60から65の1項による装置。
【請求項67】
容器用ホールダーにおける、生物試料を受容するための容器(160、170、730)の有無を検出するための方法であって、下記の工程:
−認識性を向上させた容器部分と関連する、ホールダー中の記録域が照射されること;
−記録域から到来する放射線の強度を測定すること;
−測定強度と、定められた閾値との間の比較を通じて容器の有無が記録されること、
を含む方法。
【請求項68】
照射および測定が、可動性センサーユニットを用いて実行される、請求項67による方法であって、下記の工程:
センサーユニットが、容器ホールダーに対し相対的に位置決めされること、
をさらに含む方法。
【請求項69】
生物試料処理用装置であって、
−生物試料用容器(160、170、712、714、716)を受容するための容器ホールダー;
−超音波源(830b)および超音波センサー(830a)を有するセンサーユニット;および、
−超音波ユニットのセンサーデータの関数として容器の開放状態を決定し、かつ、超音波センサーのセンサーデータの関数として、容器が開放している場合、容器における物質の可能な存在を決定するための評価ユニット、
を含む装置。
【請求項70】
物質が液体であることを特徴とする、請求項69による装置。
【請求項71】
評価ユニットが、超音波センサー(830a)のセンサーデータの関数として物質の充填レベルを決めるのに好適であることを特徴とする、請求項69または70による装置。
【請求項72】
評価ユニットが、発射超音波信号と、物質の表面から反射される超音波信号との間の移動時間を測定することによって、物質の充填レベルを決めるのに好適であることを特徴とする、請求項69から71の1項による装置。
【請求項73】
センサーユニットが可動性であり、かつ、
放射線センサー(810a)、および、
放射線センサーのセンサーデータの関数として、容器に対してセンサーユニットを位置決めするための位置決め手段(316、326)、
をさらに含むことを特徴とする、請求項69から72の1項による装置。
【請求項74】
放射線センサー(810a)が、容器の存在を決めるのに好適であることを特徴とする、請求項73による装置。
【請求項75】
−容器が、認識性を向上させた少なくとも一部分を有し;かつ、
−センサーユニットが、認識性を向上させた容器部分と関連する、ホールダー中の記録域を照射するための放射線源を有し;かつ、
−放射線センサーが、記録域から到来する放射線の強度を測定するのに好適であり;かつ、
−評価ユニットが、測定強度を定められた閾値と比較することによって容器の有無を記録するように装備される、
ことを特徴とする、請求項74による装置。
【請求項76】
生物試料処理用装置(1)であって、
−補給分の容器(730)を保管するためのコンテナステーション(720);
−容器の性質に関する情報を含む、コンテナステーション上のマーキング(721、722);および、
−マーキングを読み取るための放射線センサー(810a)
を含む装置。
【請求項77】
マーキング(721、722)が、コンテナステーションと一体的に形成される、少なくとも一つのマーキング要素を含むことを特徴とする、請求項76による装置。
【請求項78】
マーキング(721、722)が、それぞれが二進情報を含む、少なくとも二つのマーキング要素を含むことを特徴とする、請求項76または77による装置。
【請求項79】
コンテナステーションが、異なる方向において装置に設置可能であることを特徴とする、請求項76から78の1項による装置。
【請求項80】
マーキング(721、722)は、マーキングの読み取りが、様々な方向性の中から選ばれる任意の一つの方向性から独立するように構成されることを特徴とする、請求項76から79の1項による装置。
【請求項81】
マーキングを照射するための放射線源をさらに含むことを特徴とする、請求項76から80の1項による装置。
【請求項82】
コンテナステーションが、それぞれが一容器のための、複数の容器位置を含み、
−各容器が、認識性を向上させた少なくとも一部分を有し;かつ、
−放射線源(810b)が、認識性を向上させた特定の容器部分と関連し;かつ、
−放射線センサー(810a)が、照射された記録域から到来する放射線の強度を測定するのに好適であり;かつ、
−評価ユニットが、測定強度と、定められた閾値との間の比較を実行することによって容器の有無を記録するように装備される、
ことを特徴とする、請求項81による装置。
【請求項83】
容器(730)がピペットチップであることを特徴とする、請求項76から82の1項による装置。
【請求項84】
容器の性質に関する情報が、ピペットチップの容量、またはピペットチップの試料に関する情報であることを特徴とする、請求項76から83の1項による装置。
【請求項85】
光学センサー(810a)および放射線源(810b)が、光センサー(810)の部分であることを特徴とする、請求項81から84の1項による装置。
【請求項86】
マーキングを読み取るために、
−放射線源(810b)を介してマーキングのマーキング要素を照射すること;
−センサー(810a)を介してマーキング要素から到来する放射線の強度を測定すること;および、
−測定された強度を、その強度に対する任意の閾値と比較すること、
を実現するように設計される、請求項81から85の1項による装置。
【請求項87】
容器用コンテナステーション(720)において生物試料受容用容器(730)の性質を認識するための方法であって、下記の工程:
−容器の性質に関する情報を含む、コンテナステーション上の第1マーキング(721)が照射され、かつ、第1マーキングから到来する第1強度が測定されること;
−容器の性質が、測定された第1強度の関数として記録されること、
を含む方法。
【請求項88】
下記の工程:
−容器の性質に関する情報を含む、コンテナステーション上の第2マーキング(722)が照射され、かつ、第2マーキングから到来する第2強度が測定されること;および、
−容器の性質が、測定された第1および第2強度の関数として記録されること、
をさらに含むことを特徴とする、請求項87による方法。
【請求項89】
それぞれ少なくとも一つの生物試料用容器(160、170)のための、複数の容器保持位置(120、130、140、150)を有する遠心機(200)の占拠をチェックするための方法であって、下記の工程:
−容器保持位置について、その中に容器が存在するかどうかが記録されること;
−容器保持位置において存在と記録された容器の全数が保存されること;
−容器保持位置において存在と記録された容器の全数の関数として、容器保持位置における容器の分布に対する少なくとも一つの条件が決められること;
−容器保持位置において存在と記録された容器の分布が条件を満たすかどうかに関してチェックが為されること、
を含む方法。
【請求項90】
容器が、容器保持位置の中に存在するかどうかを記録するためにセンサーが使用される、請求項89による方法であって、下記の工程:
−サンプル容器位置(612)におけるサンプル容器(170)の数が記録される、
をさらに含む方法。
【請求項91】
下記の工程:
−サンプル容器(170)の数が、存在と記録された容器の全数と適合可能であるかどうかに関してチェックが為されること、
をさらに含むことを特徴とする、請求項90による方法。
【請求項92】
下記の工程:
−各場合において、サンプル(170)と、容器保持位置(120、130、140、150)の間に関連が確立されること、
をさらに含むことを特徴とする、請求項89から91の1項による方法。
【請求項93】
関連づけは、一つ以上の容器保持位置(130、14、150)から成る一群(120)に、各サンプル容器を関連づけること、但し、あるひとつの容器は上記群の中の少なくとも一つの容器保持位置において存在すると記録される、を特徴とする、請求項92による方法。
【請求項94】
関連づけは、容器保持位置に関連づけられたサンプル容器位置に、サンプル容器を運ぶようにとの指示を発することによって確立されることを特徴とする、請求項92または93の1項による方法。
【請求項95】
サンプル容器位置は、サンプル容器ステーション中のサンプル容器位置の配置は、遠心機中の容器保持位置の配置に対応するという事実によって、容器保持位置に関連づけられることを特徴とする、請求項92から94の1項による方法。
【請求項96】
関連づけは、サンプル容器のサンプル容器位置に各容器保持位置を割り当てる表を作成することによって確立されることを特徴とする、請求項92から95の1項による方法。
【請求項97】
サンプル容器位置が、サンプル容器のための攪拌器および/またはヒーター(600)の中にあることを特徴とする、請求項89から96の1項による方法。
【図1a】


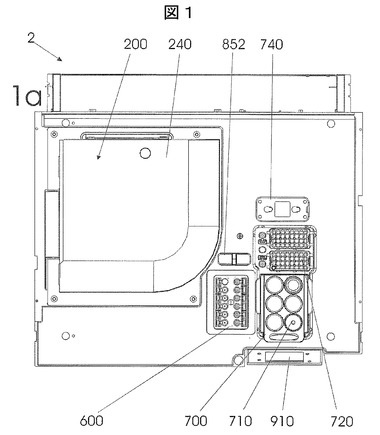
【図1b】
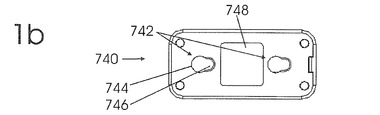
【図1c】
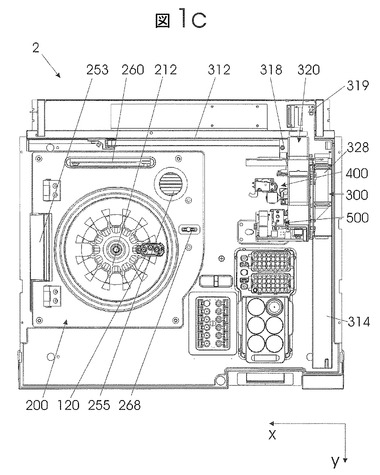
【図2a】
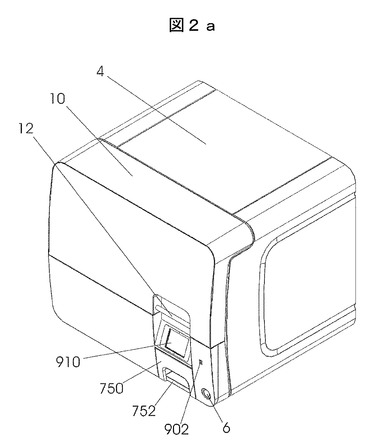
【図2b】
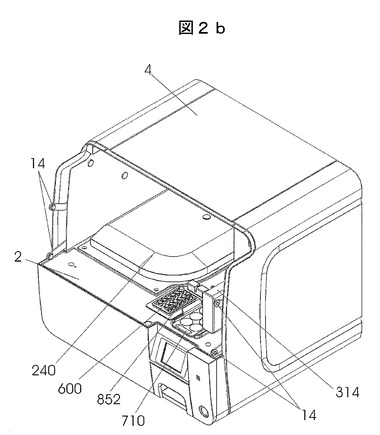
【図3a】
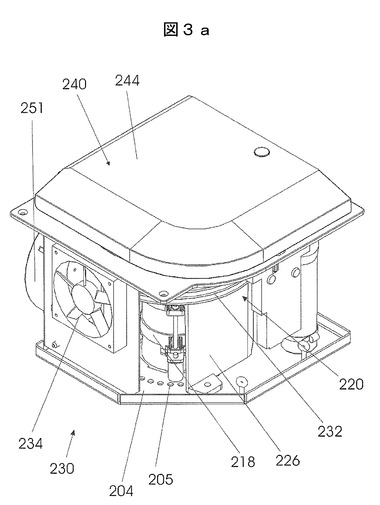
【図3b】
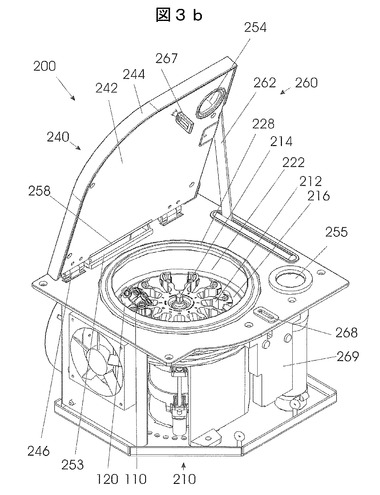
【図3c】
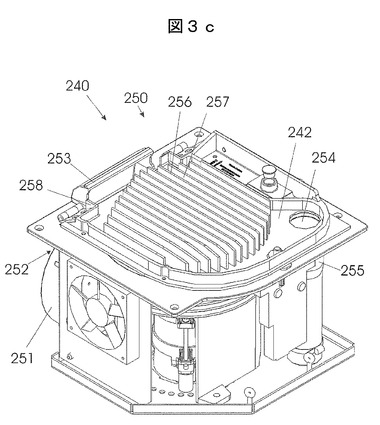
【図4】
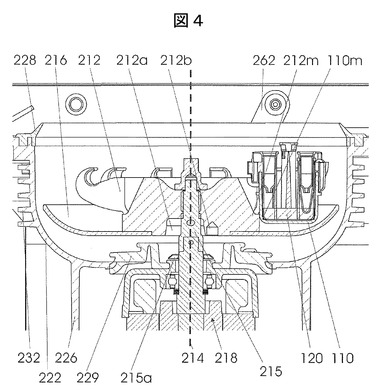
【図5】
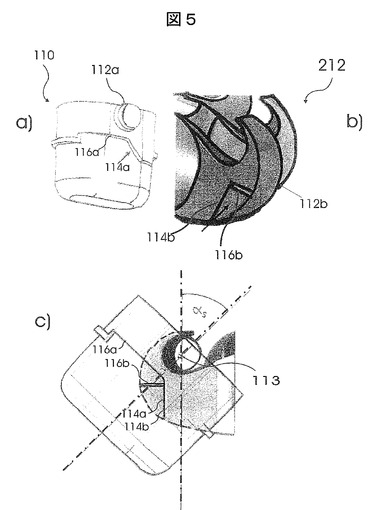
【図6】
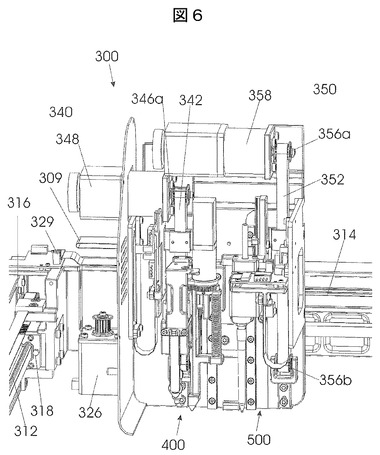
【図7】
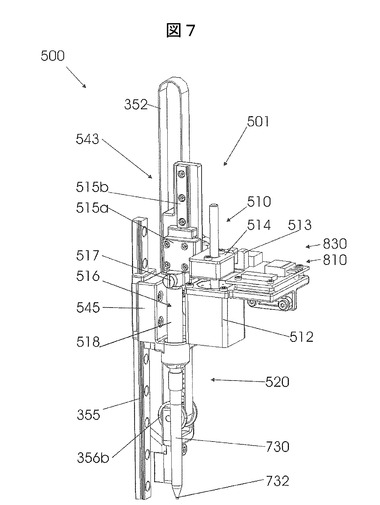
【図8】
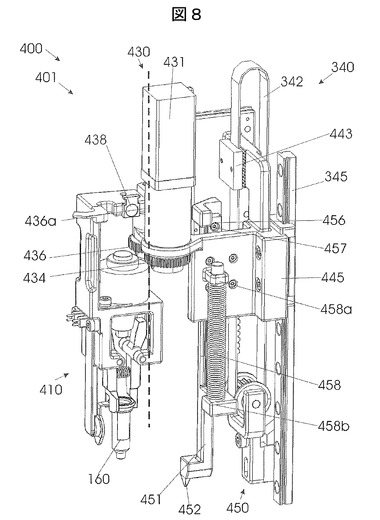
【図9】
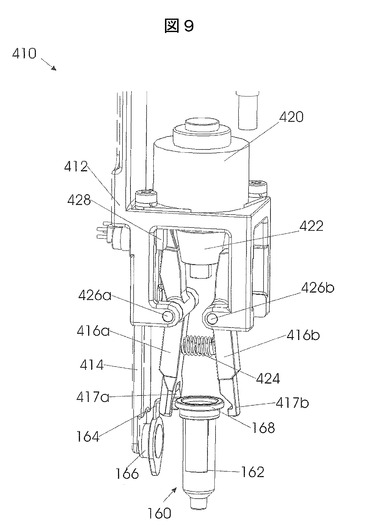
【図10】
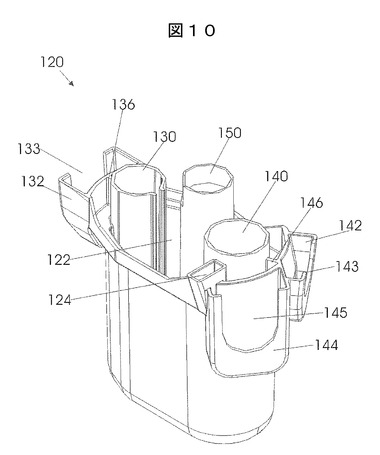
【図11a−b】
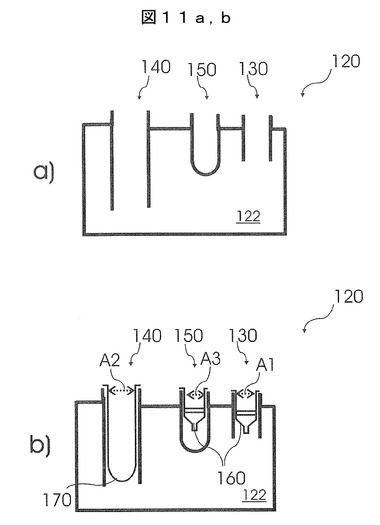
【図11c−d】
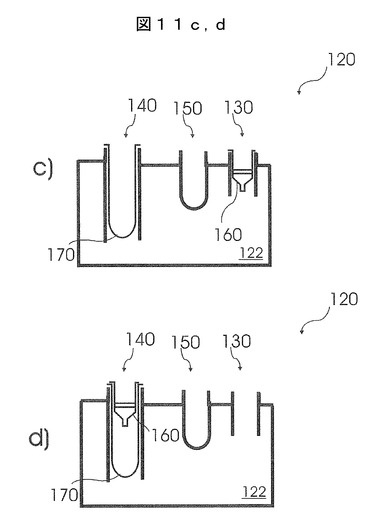
【図12】
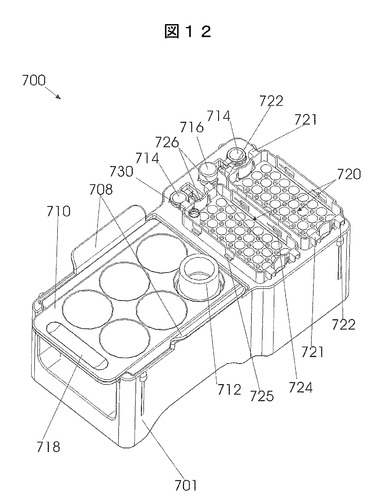
【図13】
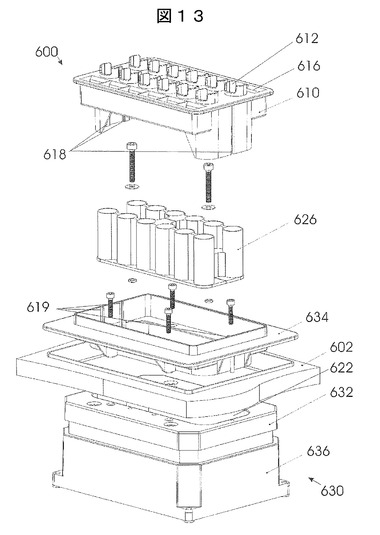
【図14】
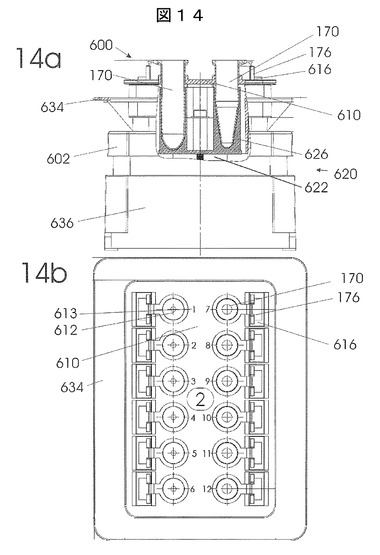
【図15】
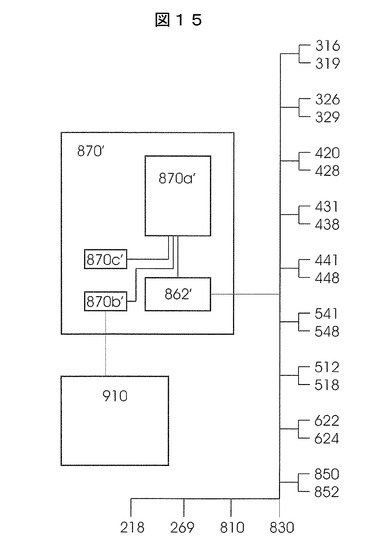
【図16】
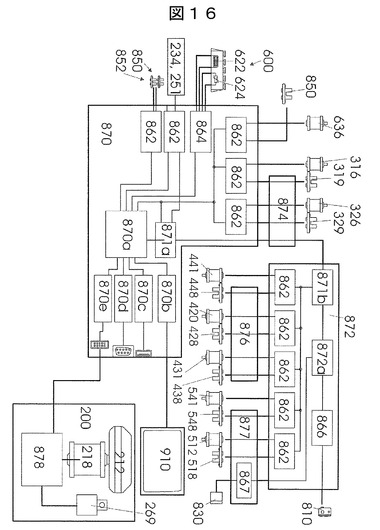
【図17a】
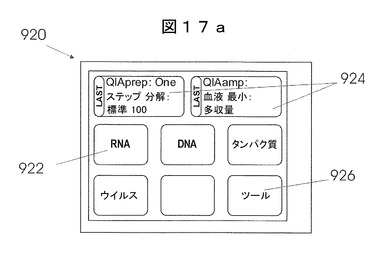
【図17b】
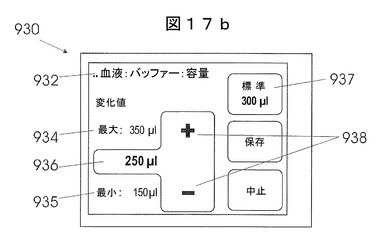
【図18a】
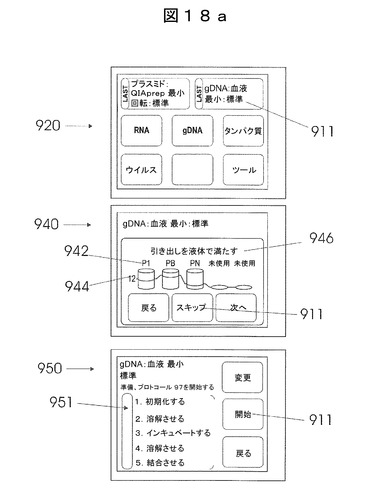
【図18b】
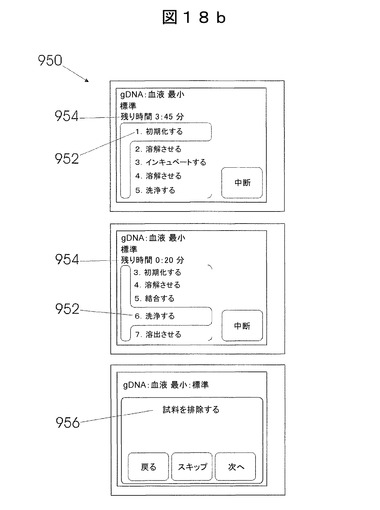
【図1b】
【図1c】
【図2a】
【図2b】
【図3a】
【図3b】
【図3c】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11a−b】
【図11c−d】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17a】
【図17b】
【図18a】
【図18b】
【公表番号】特表2009−510399(P2009−510399A)
【公表日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願番号】特願2008−531723(P2008−531723)
【出願日】平成18年9月26日(2006.9.26)
【国際出願番号】PCT/EP2006/066763
【国際公開番号】WO2007/039524
【国際公開日】平成19年4月12日(2007.4.12)
【出願人】(599072611)キアゲン ゲゼルシャフト ミット ベシュレンクテル ハフツング (83)
【Fターム(参考)】
【公表日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願日】平成18年9月26日(2006.9.26)
【国際出願番号】PCT/EP2006/066763
【国際公開番号】WO2007/039524
【国際公開日】平成19年4月12日(2007.4.12)
【出願人】(599072611)キアゲン ゲゼルシャフト ミット ベシュレンクテル ハフツング (83)
【Fターム(参考)】
[ Back to top ]