
産業機械および産業機械の制御方法
【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は産業機械および産業機械の制御方法に関する。
【背景技術】
【0002】
従来、被測定物を測定するために設けられた制御対象物としてのプローブを互いに直交するX軸方向、Y軸方向およびZ軸方向に移動させる移動機構と、この移動機構を制御する制御装置とを備える産業機械としての三次元測定機が知られている(例えば、特許文献1参照)。
【0003】
各軸方向移動機構にはそれぞれ、各軸方向移動機構の各軸方向の位置を検出するためのスケールセンサが設けられ、スケールセンサからの各軸方向のスケール信号が制御装置に送られる。このスケール信号に基づいて、プローブの各軸方向における位置が制御装置によってフィードバック制御される。
また、X軸方向移動機構はX軸駆動モータからの駆動力によって、Y軸方向移動機構はY軸駆動モータからの駆動力によって、Z軸方向移動機構はZ軸駆動モータからの駆動力によって駆動される。
各駆動モータにはエンコーダが取り付けられており、エンコーダは制御信号線を介して制御装置と接続されている。各駆動モータのモータ速度は、エンコーダからのパルス信号に基づいて検出される。このエンコーダからのパルス信号は制御装置に送られる。
各駆動モータは動力線を介して制御装置と接続されており、モータ速度は、エンコーダからのパルス信号に基づいて、制御装置によってフィードバック制御される。これにより、プローブの移動速度が制御装置によって制御される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2009−527747号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の三次元測定機において、例えば、誤って、X軸駆動モータへ接続されるべきX軸制御信号線がY軸駆動モータへ接続され、Y軸駆動モータへ接続されるべきY軸制御信号線がX軸駆動モータへ接続されている場合には、X軸駆動モータのモータ速度に関するパルス信号とY軸駆動モータのモータ速度に関するパルス信号とが入れ替わって制御装置に送られ、プローブが制御装置によって適切に制御されない。
【0006】
このような場合、例えば、制御装置が、プローブをX軸方向へ移動するように制御しているにも関わらず、X軸駆動モータのモータ速度に関するパルス信号に入れ替わってY軸駆動モータのモータ速度に関するパルス信号が制御装置に送られてくるので、制御装置はプローブをX軸方向へ移動するように制御し続ける。よって、プローブがX軸方向へ移動させられ続け、プローブの移動速度が所望の速度よりも速くなってしまう。
このとき、非常停止ボタンなどを押すことによってプローブの移動を停止させることも考えられるが、停止させることに時間がかかる。また、プローブが制御装置によって適切に制御されないため、プローブが被測定物に不用意な速度で当たってしまうこともあり、プローブや被測定物が損傷してしまう。
【0007】
さらに、従来の三次元測定機では、各軸方向移動機構は、プローブが軸方向に移動したときに、A相の波形を伝送するA相制御信号線とB相の波形を伝送するB相制御信号線とを備え、制御装置はA相の波形とB相の波形とに基づいてプローブの移動方向を制御する。このA相制御信号線とB相制御信号線とが誤って入れ替わっている場合も、X軸制御信号線とY軸制御信号線とが誤って入れ替わっている場合と同様に、プローブが制御装置によって適切に制御されない。
【0008】
本発明の目的は、制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供することである。
【課題を解決するための手段】
【0009】
本発明の産業機械は、所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械であって、前記制御装置は、前記制御対象物の前記軸方向への移動を停止させる停止手段を有し、前記停止手段は、前記制御対象物の前記軸方向への移動速度を監視する速度監視部と、前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部と、前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止部とを備えることを特徴とする。
【0010】
このような構成によれば、制御対象物の軸方向への移動速度を監視し、制御対象物の移動速度が所定の閾値を超えた場合に、制御対象物の移動を停止させるので、制御装置と移動機構とを接続する制御信号線が誤って接続されている場合であっても、制御対象物の移動を確実に停止できる。よって、操作者が非常停止ボタンなどを押すことによって制御対象物の移動を停止させるよりも早く、制御対象物の移動を停止できる。これにより、制御対象物が所定の閾値を超えた移動速度で移動し、例えば、制御対象物が被測定物に不用意な速度で当たってしまい、制御対象物や被測定物が損傷してしまうことを防止できる。
【0011】
本発明の産業機械において、前記停止手段は、前記所定の閾値を設定させる閾値設定部を備えることが好ましい。
【0012】
このような構成によれば、操作者が閾値設定部に所定の閾値を設定できるため、設定する閾値を変えることにより、特定の機種に限定されること無く、様々な産業機械を制御可能となる。
【0013】
本発明の産業機械の制御方法は、所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械の制御方法であって、前記制御対象物の前記軸方向への移動速度を監視する速度監視工程と、前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定工程と、前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止工程とを備えることを特徴とする。
【0014】
このような構成によれば、制御対象物の軸方向への移動速度を監視し、制御対象物の移動速度が所定の閾値を超えた場合に、制御対象物の移動を停止させるので、制御装置と移動機構とを接続する制御信号線が誤って接続されている場合であっても、制御対象物の移動を確実に停止できる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態に係る三次元測定機を示すブロック図。
【図2】本発明の実施形態に係る三次元測定機の制御方法を示すフローチャート。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を図面に基づいて説明する。
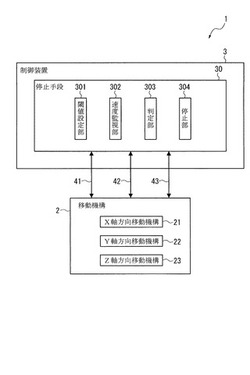
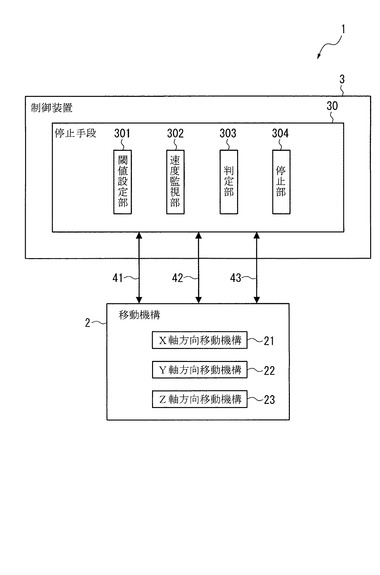
図1に示す産業機械としての三次元測定機1は、図示しない被測定物を測定するために三次元測定機1に設けられた制御対象物としてのプローブを移動させる移動機構2と、移動機構2を制御する制御装置3とを備える。
【0017】
移動機構2は、プローブをX軸方向、Y軸方向およびZ軸方向に沿って移動させるX軸方向移動機構21とY軸方向移動機構22とZ軸方向移動機構23とを備えている。X軸方向移動機構21、Y軸方向移動機構22およびZ軸方向移動機構23には、プローブの各軸方向の移動量を検出するスケールセンサが設けられている。
【0018】
制御装置3は、各軸方向に移動しているプローブを停止させる停止手段30を有している。
停止手段30は、閾値設定部301と、速度監視部302と、判定部303と、停止部304とを備えており、X軸ケーブル部41、Y軸ケーブル部42、Z軸ケーブル部43によって移動機構2と接続されている。
X軸ケーブル部41は、図示しないX軸制御信号線が入ったケーブルとX軸動力線が入ったケーブルとを備える。Y軸ケーブル部42とZ軸ケーブル部43も同様に、各軸制御信号線が入ったケーブルと各軸動力線が入ったケーブルとを備える。
閾値設定部301は、図示しない入力手段を操作者に操作させることによって、閾値としての各軸方向におけるプローブの最高移動速度Vmaxを設定させる。
そして、制御装置3の図示しないメモリー部が、設定された最高移動速度Vmaxを記憶する。
【0019】
速度監視部302は、各軸方向移動機構21,22,23に設けられたスケールセンサからの各軸方向におけるプローブの位置情報に基づいて、各軸方向のプローブの移動速度Vを算出して監視する。
判定部303は、各軸方向のプローブの移動速度Vが最高移動速度Vmaxを超えているか否かを判定する。
停止部304は、プローブの移動速度Vが最高移動速度Vmaxを超えているときにプローブの移動を停止する。
【0020】
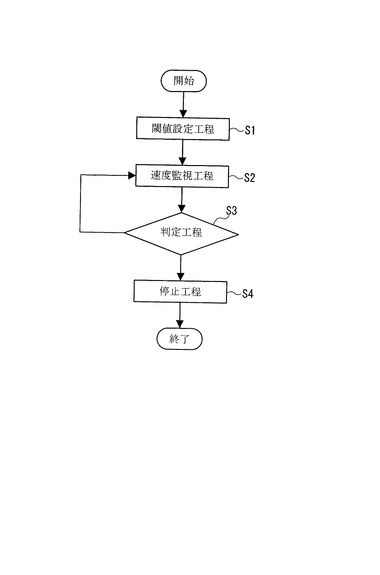
次に、以上のような三次元測定機1の制御方法について図2に基づいて説明する。以下では、各制御工程をS1,S2・・・で示す。
S1の閾値設定工程で、まず、閾値設定部301は、図示しない入力手段を操作者に操作させることによって、各軸方向におけるプローブの最高移動速度Vmaxを設定させる。
【0021】
次に、S2の速度監視工程で、速度監視部302が、各軸に設けられたスケールセンサからの各軸方向におけるプローブの位置情報に基づいて、各軸方向のプローブの移動速度Vを算出し、各軸方向におけるプローブの移動速度Vを監視する。この工程では、速度監視部302は、プローブが所定の時間Nの間ごとに移動した距離に基づいて移動速度Vを算出して監視する。時間Nは例えば100msである。
【0022】
次に、S3の判定工程で、判定部303が各軸方向のプローブの移動速度Vが最高移動速度Vmaxを超えたか否かを判定する。
S3の判定工程で、判定部303によって、例えばX軸方向のプローブの移動速度Vが最高移動速度Vmaxを超えたと判定された場合には、S4の停止工程で、停止部304がプローブの移動を停止する。
そして、S3の判定工程で、移動速度Vが最高移動速度Vmaxを超えていないと判定された場合には、再びS2の工程が実行される。
【0023】
以上のような本実施形態の三次元測定機1および三次元測定機1の制御方法では、以下の効果がある。
本実施形態では、三次元測定機1は速度監視部302と判定部303と停止部304とを備え、速度監視工程S2と判定工程S3と停止工程S4とで制御される。各軸ごとのプローブの位置情報に基づいた移動速度Vを監視し、プローブの移動速度Vが最高移動速度Vmaxを超えた場合に、プローブの移動を停止させるので、例えば、各軸動力線は制御装置3と各軸方向移動機構21,22,23との間で正常に接続されているが、誤って、制御装置3とX軸方向移動機構21とが接続されるべきX軸制御信号線がY軸方向移動機構22に接続され、制御装置3とY軸方向移動機構22とが接続されるべきY軸制御信号線がX軸方向移動機構21に接続されている場合であっても、プローブの移動を確実に停止できる。よって、操作者が図示しない非常停止ボタンなどを押すことによってプローブの移動を停止させるよりも早く、プローブの移動を停止できる。これにより、例えば、プローブが被測定物に不用意な速度で当たってしまい、プローブや被測定物が損傷してしまうことを防止できる。
また、本実施形態では、S1の閾値設定工程で、閾値設定部301に各軸方向におけるプローブの最高移動速度Vmaxが設定される。このため、設定する最高移動速度Vmaxを変えることにより、特定の機種に限定されること無く、様々な三次元測定機を制御可能となる。
【0024】
なお、本発明は前述の実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
前記実施形態では、プローブをX軸方向、Y軸方向およびZ軸方向に沿って移動させる三次元測定機1について説明したが、プローブを少なくとも1軸方向、例えばX軸方向に移動させる産業ロボットなどであってもよい。
また、前記実施形態では、停止手段30は閾値設定部301を備え、三次元測定機1の制御方法では閾値設定工程S1を備えていたが、閾値設定部301および閾値設定工程S1を備えていなくてもよい。この場合には、制御装置3の図示しないメモリー部が、各軸方向におけるプローブの最高移動速度Vmaxを予め記憶している。
【産業上の利用可能性】
【0025】
本発明は産業機械および産業機械の制御方法に利用することができる。
【符号の説明】
【0026】
1…三次元測定機(産業機械)
2…移動機構
3…制御装置
30…停止手段
301…閾値設定部
302…速度監視部
303…判定部
304…停止部
S2…速度監視工程
S3…判定工程
S4…停止工程
V…移動速度
Vmax…最高移動速度(閾値)
【技術分野】
【0001】
本発明は産業機械および産業機械の制御方法に関する。
【背景技術】
【0002】
従来、被測定物を測定するために設けられた制御対象物としてのプローブを互いに直交するX軸方向、Y軸方向およびZ軸方向に移動させる移動機構と、この移動機構を制御する制御装置とを備える産業機械としての三次元測定機が知られている(例えば、特許文献1参照)。
【0003】
各軸方向移動機構にはそれぞれ、各軸方向移動機構の各軸方向の位置を検出するためのスケールセンサが設けられ、スケールセンサからの各軸方向のスケール信号が制御装置に送られる。このスケール信号に基づいて、プローブの各軸方向における位置が制御装置によってフィードバック制御される。
また、X軸方向移動機構はX軸駆動モータからの駆動力によって、Y軸方向移動機構はY軸駆動モータからの駆動力によって、Z軸方向移動機構はZ軸駆動モータからの駆動力によって駆動される。
各駆動モータにはエンコーダが取り付けられており、エンコーダは制御信号線を介して制御装置と接続されている。各駆動モータのモータ速度は、エンコーダからのパルス信号に基づいて検出される。このエンコーダからのパルス信号は制御装置に送られる。
各駆動モータは動力線を介して制御装置と接続されており、モータ速度は、エンコーダからのパルス信号に基づいて、制御装置によってフィードバック制御される。これにより、プローブの移動速度が制御装置によって制御される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2009−527747号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の三次元測定機において、例えば、誤って、X軸駆動モータへ接続されるべきX軸制御信号線がY軸駆動モータへ接続され、Y軸駆動モータへ接続されるべきY軸制御信号線がX軸駆動モータへ接続されている場合には、X軸駆動モータのモータ速度に関するパルス信号とY軸駆動モータのモータ速度に関するパルス信号とが入れ替わって制御装置に送られ、プローブが制御装置によって適切に制御されない。
【0006】
このような場合、例えば、制御装置が、プローブをX軸方向へ移動するように制御しているにも関わらず、X軸駆動モータのモータ速度に関するパルス信号に入れ替わってY軸駆動モータのモータ速度に関するパルス信号が制御装置に送られてくるので、制御装置はプローブをX軸方向へ移動するように制御し続ける。よって、プローブがX軸方向へ移動させられ続け、プローブの移動速度が所望の速度よりも速くなってしまう。
このとき、非常停止ボタンなどを押すことによってプローブの移動を停止させることも考えられるが、停止させることに時間がかかる。また、プローブが制御装置によって適切に制御されないため、プローブが被測定物に不用意な速度で当たってしまうこともあり、プローブや被測定物が損傷してしまう。
【0007】
さらに、従来の三次元測定機では、各軸方向移動機構は、プローブが軸方向に移動したときに、A相の波形を伝送するA相制御信号線とB相の波形を伝送するB相制御信号線とを備え、制御装置はA相の波形とB相の波形とに基づいてプローブの移動方向を制御する。このA相制御信号線とB相制御信号線とが誤って入れ替わっている場合も、X軸制御信号線とY軸制御信号線とが誤って入れ替わっている場合と同様に、プローブが制御装置によって適切に制御されない。
【0008】
本発明の目的は、制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供することである。
【課題を解決するための手段】
【0009】
本発明の産業機械は、所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械であって、前記制御装置は、前記制御対象物の前記軸方向への移動を停止させる停止手段を有し、前記停止手段は、前記制御対象物の前記軸方向への移動速度を監視する速度監視部と、前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部と、前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止部とを備えることを特徴とする。
【0010】
このような構成によれば、制御対象物の軸方向への移動速度を監視し、制御対象物の移動速度が所定の閾値を超えた場合に、制御対象物の移動を停止させるので、制御装置と移動機構とを接続する制御信号線が誤って接続されている場合であっても、制御対象物の移動を確実に停止できる。よって、操作者が非常停止ボタンなどを押すことによって制御対象物の移動を停止させるよりも早く、制御対象物の移動を停止できる。これにより、制御対象物が所定の閾値を超えた移動速度で移動し、例えば、制御対象物が被測定物に不用意な速度で当たってしまい、制御対象物や被測定物が損傷してしまうことを防止できる。
【0011】
本発明の産業機械において、前記停止手段は、前記所定の閾値を設定させる閾値設定部を備えることが好ましい。
【0012】
このような構成によれば、操作者が閾値設定部に所定の閾値を設定できるため、設定する閾値を変えることにより、特定の機種に限定されること無く、様々な産業機械を制御可能となる。
【0013】
本発明の産業機械の制御方法は、所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械の制御方法であって、前記制御対象物の前記軸方向への移動速度を監視する速度監視工程と、前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定工程と、前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止工程とを備えることを特徴とする。
【0014】
このような構成によれば、制御対象物の軸方向への移動速度を監視し、制御対象物の移動速度が所定の閾値を超えた場合に、制御対象物の移動を停止させるので、制御装置と移動機構とを接続する制御信号線が誤って接続されている場合であっても、制御対象物の移動を確実に停止できる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態に係る三次元測定機を示すブロック図。
【図2】本発明の実施形態に係る三次元測定機の制御方法を示すフローチャート。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を図面に基づいて説明する。
図1に示す産業機械としての三次元測定機1は、図示しない被測定物を測定するために三次元測定機1に設けられた制御対象物としてのプローブを移動させる移動機構2と、移動機構2を制御する制御装置3とを備える。
【0017】
移動機構2は、プローブをX軸方向、Y軸方向およびZ軸方向に沿って移動させるX軸方向移動機構21とY軸方向移動機構22とZ軸方向移動機構23とを備えている。X軸方向移動機構21、Y軸方向移動機構22およびZ軸方向移動機構23には、プローブの各軸方向の移動量を検出するスケールセンサが設けられている。
【0018】
制御装置3は、各軸方向に移動しているプローブを停止させる停止手段30を有している。
停止手段30は、閾値設定部301と、速度監視部302と、判定部303と、停止部304とを備えており、X軸ケーブル部41、Y軸ケーブル部42、Z軸ケーブル部43によって移動機構2と接続されている。
X軸ケーブル部41は、図示しないX軸制御信号線が入ったケーブルとX軸動力線が入ったケーブルとを備える。Y軸ケーブル部42とZ軸ケーブル部43も同様に、各軸制御信号線が入ったケーブルと各軸動力線が入ったケーブルとを備える。
閾値設定部301は、図示しない入力手段を操作者に操作させることによって、閾値としての各軸方向におけるプローブの最高移動速度Vmaxを設定させる。
そして、制御装置3の図示しないメモリー部が、設定された最高移動速度Vmaxを記憶する。
【0019】
速度監視部302は、各軸方向移動機構21,22,23に設けられたスケールセンサからの各軸方向におけるプローブの位置情報に基づいて、各軸方向のプローブの移動速度Vを算出して監視する。
判定部303は、各軸方向のプローブの移動速度Vが最高移動速度Vmaxを超えているか否かを判定する。
停止部304は、プローブの移動速度Vが最高移動速度Vmaxを超えているときにプローブの移動を停止する。
【0020】
次に、以上のような三次元測定機1の制御方法について図2に基づいて説明する。以下では、各制御工程をS1,S2・・・で示す。
S1の閾値設定工程で、まず、閾値設定部301は、図示しない入力手段を操作者に操作させることによって、各軸方向におけるプローブの最高移動速度Vmaxを設定させる。
【0021】
次に、S2の速度監視工程で、速度監視部302が、各軸に設けられたスケールセンサからの各軸方向におけるプローブの位置情報に基づいて、各軸方向のプローブの移動速度Vを算出し、各軸方向におけるプローブの移動速度Vを監視する。この工程では、速度監視部302は、プローブが所定の時間Nの間ごとに移動した距離に基づいて移動速度Vを算出して監視する。時間Nは例えば100msである。
【0022】
次に、S3の判定工程で、判定部303が各軸方向のプローブの移動速度Vが最高移動速度Vmaxを超えたか否かを判定する。
S3の判定工程で、判定部303によって、例えばX軸方向のプローブの移動速度Vが最高移動速度Vmaxを超えたと判定された場合には、S4の停止工程で、停止部304がプローブの移動を停止する。
そして、S3の判定工程で、移動速度Vが最高移動速度Vmaxを超えていないと判定された場合には、再びS2の工程が実行される。
【0023】
以上のような本実施形態の三次元測定機1および三次元測定機1の制御方法では、以下の効果がある。
本実施形態では、三次元測定機1は速度監視部302と判定部303と停止部304とを備え、速度監視工程S2と判定工程S3と停止工程S4とで制御される。各軸ごとのプローブの位置情報に基づいた移動速度Vを監視し、プローブの移動速度Vが最高移動速度Vmaxを超えた場合に、プローブの移動を停止させるので、例えば、各軸動力線は制御装置3と各軸方向移動機構21,22,23との間で正常に接続されているが、誤って、制御装置3とX軸方向移動機構21とが接続されるべきX軸制御信号線がY軸方向移動機構22に接続され、制御装置3とY軸方向移動機構22とが接続されるべきY軸制御信号線がX軸方向移動機構21に接続されている場合であっても、プローブの移動を確実に停止できる。よって、操作者が図示しない非常停止ボタンなどを押すことによってプローブの移動を停止させるよりも早く、プローブの移動を停止できる。これにより、例えば、プローブが被測定物に不用意な速度で当たってしまい、プローブや被測定物が損傷してしまうことを防止できる。
また、本実施形態では、S1の閾値設定工程で、閾値設定部301に各軸方向におけるプローブの最高移動速度Vmaxが設定される。このため、設定する最高移動速度Vmaxを変えることにより、特定の機種に限定されること無く、様々な三次元測定機を制御可能となる。
【0024】
なお、本発明は前述の実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
前記実施形態では、プローブをX軸方向、Y軸方向およびZ軸方向に沿って移動させる三次元測定機1について説明したが、プローブを少なくとも1軸方向、例えばX軸方向に移動させる産業ロボットなどであってもよい。
また、前記実施形態では、停止手段30は閾値設定部301を備え、三次元測定機1の制御方法では閾値設定工程S1を備えていたが、閾値設定部301および閾値設定工程S1を備えていなくてもよい。この場合には、制御装置3の図示しないメモリー部が、各軸方向におけるプローブの最高移動速度Vmaxを予め記憶している。
【産業上の利用可能性】
【0025】
本発明は産業機械および産業機械の制御方法に利用することができる。
【符号の説明】
【0026】
1…三次元測定機(産業機械)
2…移動機構
3…制御装置
30…停止手段
301…閾値設定部
302…速度監視部
303…判定部
304…停止部
S2…速度監視工程
S3…判定工程
S4…停止工程
V…移動速度
Vmax…最高移動速度(閾値)
【特許請求の範囲】
【請求項1】
所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械であって、
前記制御装置は、前記制御対象物の前記軸方向への移動を停止させる停止手段を有し、
前記停止手段は、前記制御対象物の前記軸方向への移動速度を監視する速度監視部と、前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部と、前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止部とを備えることを特徴とする産業機械。
【請求項2】
請求項1に記載の産業機械において、
前記停止手段は、前記所定の閾値を設定させる閾値設定部を備えることを特徴とする産業機械。
【請求項3】
所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械の制御方法であって、
前記制御対象物の前記軸方向への移動速度を監視する速度監視工程と、
前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定工程と、
前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止工程とを備えることを特徴とする産業機械の制御方法。
【請求項1】
所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械であって、
前記制御装置は、前記制御対象物の前記軸方向への移動を停止させる停止手段を有し、
前記停止手段は、前記制御対象物の前記軸方向への移動速度を監視する速度監視部と、前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部と、前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止部とを備えることを特徴とする産業機械。
【請求項2】
請求項1に記載の産業機械において、
前記停止手段は、前記所定の閾値を設定させる閾値設定部を備えることを特徴とする産業機械。
【請求項3】
所定の軸方向へ制御対象物を移動させる移動機構と、前記移動機構を制御する制御装置とを備える産業機械の制御方法であって、
前記制御対象物の前記軸方向への移動速度を監視する速度監視工程と、
前記制御対象物の前記軸方向への移動速度が所定の閾値を超えているか否かを判定する判定工程と、
前記制御対象物の前記軸方向への移動速度が前記所定の閾値を超えている場合に、前記制御対象物の移動を停止させる停止工程とを備えることを特徴とする産業機械の制御方法。
【図1】


【図2】
【図2】
【公開番号】特開2012−18046(P2012−18046A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−154851(P2010−154851)
【出願日】平成22年7月7日(2010.7.7)
【出願人】(000137694)株式会社ミツトヨ (979)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月7日(2010.7.7)
【出願人】(000137694)株式会社ミツトヨ (979)
【Fターム(参考)】
[ Back to top ]