
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置
【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを交流電源側に回生する電源回生機能を産業用ロボットの操作条件に応じて追加することができる電源回生サーボモータ駆動装置に関する。
【背景技術】
【0002】
従来、サーボモータの減速駆動時に生じる回生エネルギーを処理するために、回生エネルギーを回生抵抗によって消費する抵抗回生機能を有するサーボモータ駆動装置と、回生エネルギーを交流電源側に回生する電源回生機能を有するサーボモータ駆動装置とが用いられている。
【0003】
抵抗回生機能を有するサーボモータ駆動装置は、交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換するインバータに直流電力を供給する複数のダイオードを有するコンバータと、スイッチング素子(例えば、NPN型トランジスタ)及び回生抵抗の直列接続を有する回生抵抗回路と、を有する。
【0004】
電源回生機能を有するサーボモータ駆動装置は、複数のダイオードの他に複数のダイオードのそれぞれに並列に接続された、ダイオードと同数のスイッチング素子を有するコンバータを有する。
【0005】
抵抗回生機能を有するサーボモータ駆動装置のコンバータは、スイッチング素子を有さないので、電源回生機能を有するサーボモータ駆動装置よりも装置の小型化に有利である。一方、電源回生機能を有するサーボモータ駆動装置は、抵抗回生機能を有するサーボモータ駆動装置よりも多くの量の回生エネルギーを消費することができる。
【0006】
産業用ロボットの可動部(例えば、アーム)の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーは、通常、工作機械又は産業機械の可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーより小さく、抵抗回生によって十分対処することができる。したがって、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動する場合、装置の小型化に有利な抵抗回生機能を有するサーボモータ駆動装置が一般的に用いられる。
【0007】
しかしながら、複数の産業用ロボットを同時に操作する場合、産業用ロボットの可動部の回転軸に接続されたサーボモータ及び産業用ロボットの周辺機器の可動部の回転軸に接続されたサーボモータを同時に駆動する場合、大型又は高速の産業用ロボットを操作する場合等において、サーボモータの減速駆動時に生じる回生エネルギーは、抵抗回生によって処理できる回生エネルギーより大きくなるときがある。この場合、生じた回生エネルギーを処理できるようにするために、抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置が用いられる。抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置は、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータと、回生抵抗回路と、を有する。
【0008】
従来、抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置として、回生エネルギーが所定の量以下のときには電源回生のみを行い、回生エネルギーが所定の量を超えると電源回生と抵抗回生の両方を行うサーボモータ駆動装置(例えば、特許文献1〜3)、瞬時停電が発生した場合に電源回生を終了するとともに抵抗回生を開始するサーボモータ駆動装置(例えば、特許文献4)等が提案されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】実開昭62−26192号公報
【特許文献2】特開2004−154961号公報
【特許文献3】特開2011−101473号公報
【特許文献4】特開2011−101474号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動する場合、操作する産業用ロボットの個数、産業用ロボットと同時に使用される周辺装置の有無、産業用ロボットの大きさ又は速度等の産業用ロボットの操作条件に応じて、回生エネルギーの処理の際に抵抗回生機能のみで十分であるか抵抗回生機能と電源回生機能の両方を必要とするかが決定される。すなわち、回生エネルギーの処理の際に抵抗回生機能のみで十分である場合には、複数のダイオードを有するコンバータと、回生抵抗回路とを用いて装置の小型化を実現し、回生エネルギーの処理の際に抵抗回生機能と電源回生機能の両方を必要とする場合には、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータと、回生抵抗回路とを用いて電源回生を行うことが所望される。
【0011】
しかしながら、従来の抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置では、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータが予め装備されているので、回生エネルギーの処理の際に抵抗回生機能のみで十分である場合でも、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータが用いられる。したがって、従来の抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置では、電源回生機能を産業用ロボットの操作条件に応じて追加することができない。
【0012】
本発明の目的は、電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供することである。
【課題を解決するための手段】
【0013】
本発明によるサーボモータ駆動装置は、交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、第1のコンバータに並列に接続され、第1のスイッチング素子と、第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、を有し、第2のコンバータは、交流電源からの交流電流を直流電流に変換し、第1のインバータに直流電力を供給する複数の第2の整流素子と、複数の第2の整流素子のそれぞれに並列に接続された複数の第2の整流素子と同数の第2のスイッチング素子と、第2のコンバータが第1の接続部に接続された場合、第2のスイッチング素子をオン状態にして、回生エネルギーを交流電源側に回生する第2の制御部と、を有する。
【0014】
本発明による他のサーボモータ駆動装置は、複数のサーボモータ駆動部を有し、複数のサーボモータ駆動部はそれぞれ、交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、第1のコンバータに並列に接続され、第1のスイッチング素子と、第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、を有し、第2のコンバータは、交流電源からの交流電流を直流電流に変換し、第1のインバータに直流電力を供給する複数の第2の整流素子と、複数の第2の整流素子のそれぞれに並列に接続された複数の第2の整流素子と同数の第2のスイッチング素子と、第2のコンバータが複数のサーボモータ駆動部の全ての第1の接続部に接続された場合、第2のスイッチング素子をオン状態にして、回生エネルギーを交流電源側に回生する第2の制御部と、を有する。
【0015】
好適には、直流電力を交流電力に変換する第2のインバータに接続される、産業用ロボットの周辺機器の回転軸に接続されたサーボモータの回転軸に着脱自在に接続する第2の接続部を更に有する。
【0016】
好適には、第2のコンバータが第1の接続部に接続され、かつ、第1のインバータの両端間の電圧又は第2のコンバータの両端の電圧が、サーボモータの減速駆動開始直後の電圧を超えるとともにサーボモータ駆動装置に含まれる素子の破壊レベルの電圧よりも低い第1の電圧と、第1の電圧を超えるとともに破壊レベルの電圧よりも低い第2の電圧との間にある間、第1の制御部は、第1のスイッチング素子をオフ状態にし、第2の制御部は、第2のスイッチング素子をオン状態にする。
【0017】
好適には、第1のインバータの両端間の電圧又は第2のコンバータの両端間の電圧が第2の電圧を超えて破壊レベルの電圧に到達するまでの間、第1の制御部は、第1のスイッチング素子をオン状態にし、第2の制御部は、第2のスイッチング素子をオン状態にする。
【0018】
好適には、交流電源と第2のコンバータとの間に配置されたコンタクタの遮断を、第2のコンバータが回生エネルギーを交流電源側に回生しているときに検出した場合、第2の制御部は、第2のスイッチング素子をオフ状態にする。
【発明の効果】
【0019】
本発明によれば、回生エネルギーを交流電源側に回生する第2のコンバータを第1の接続部を通じてサーボモータ駆動装置に着脱自在にしているので、電源回生機能を産業用ロボットの操作条件に応じて追加することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【図2】本発明の第2の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【図3】本発明の第3の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【図4】本発明の第4の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【発明を実施するための形態】
【0021】
本発明によるサーボモータ駆動装置の実施の形態を、図面を参照しながら説明する。なお、図面中、同一構成要素には同一符号を付す。
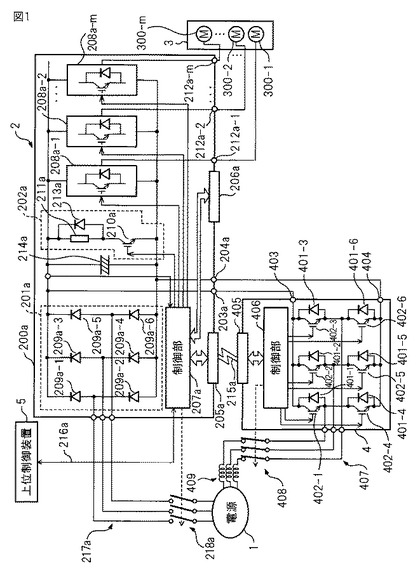
図1は、本発明の第1の実施の形態のモータ制御装置を有するシステムのブロック図である。図1に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2と、産業用ロボット3と、第2のコンバータとしてのコンバータ4と、上位制御装置5と、を有する。
【0022】
本実施の形態では、サーボモータ駆動装置2は、一つのサーボモータ駆動部200aによって構成される。サーボモータ駆動部200aは、第1のコンバータとしてのコンバータ201aと、回生抵抗回路202aと、第1の接続部(インタフェース)を構成するコネクタ203a,204a及び8ピンコネクタのような多ピンコネクタ205a,206aと、制御部207aと、を有する。
【0023】
コンバータ201aは、第1のインバータとしての互いに並列に接続したm(mは任意の自然数)個のインバータ208a−1,208a−2,,,,,208a−mに直流電力を供給する複数の第1の整流素子としてのブリッジ接続された6個のダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有する。インバータ208a−1,208a−2,,,,,208a−mはそれぞれ、コンバータ201aから供給される直流電力を交流電力に変換する。
【0024】
回生抵抗回路202aは、コンバータ201aに並列に接続され、第1のスイッチング素子としての還流トランジスタであるNPN型トランジスタ(IGBT)210aと、回生抵抗211aと、を有する。回生抵抗211aは、産業用ロボット3の可動部(例えば、アーム)の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する。サーボモータ300−1,300−2,...,300−mは、コネクタ212a−1,212a−2,...,212a−mを介してインバータ208a−1,208a−2,,,,,208a−mのそれぞれに直列接続される。本実施の形態では、回生抵抗211aにダイオード213aが並列に接続され、平滑コンデンサ214aがコンバータ201aに並列に接続される。
【0025】
コネクタ203a,204aは、コンバータ4の直流電流出力側に設けられた二つのピン(図示せず)を着脱自在にするように構成され、これら二つのピンがコネクタ203a,203bにそれぞれ装着したときに、コンバータ4から供給される直流電力がインバータ208a−1,208a−2,,,,,208a−m側に供給されるようにする。多ピンコネクタ205a,206aは、多芯ケーブルを通じて他の部材と接続するために用いられる。本実施の形態では、多ピンコネクタ205aは、制御部207aとコンバータ4との間でデータのやり取りが行えるようにするために多芯ケーブル215aを通じてサーボモータ駆動部200aとコンバータ4とを接続する。
【0026】
制御部207aは、光ケーブル216aを通じた上位制御装置5とのデータのやり取りの他に、多ピンコネクタ205aを通じたコンバータ4とのデータのやり取りを行い、NPN型トランジスタ210aのオンオフ動作の制御、インバータ208a−1,208a−2,,,,,208a−mの駆動制御及び三相交流電源1とコンバータ201aとの間の配線217aに配置されたスイッチ218aのオンオフ動作の制御を行う。このために、制御部207aは、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってサーボモータ駆動部200aの各種処理を実行する。本実施の形態では、制御部207aは、コンバータ4の両端間の電圧、コンバータ201aの両端間の電圧又はインバータ208a−1,208a−2,,,,,208a−mの両端間の電圧を検出するために、平滑コンデンサ214aの両端間の電圧すなわちDCリンク電圧を検出する。
【0027】
コンバータ4は、コネクタ203a,204a及び多ピンコネクタ205a,206aに対して着脱自在であり、交流電源1からの交流電流を直流電流に変換する。このために、コンバータ4は、インバータ208a−1,208a−2,,,,,208a−mに直流電力を供給する複数の第2の整流素子としてのブリッジ接続された6個のダイオード401−1,401−2,401−3,401−4,401−5,401−6と、ダイオード401−1,401−2,401−3,401−4,401−5,401−6のそれぞれに並列に接続された第2のスイッチング素子としてのNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6と、コネクタ203aに対応するコネクタ403と、コネクタ204aに対応するコネクタ404と、多芯ケーブル215aを通じて多ピンコネクタ205aに接続する多ピンコネクタ405と、第2の制御部としての制御部406と、を有する。
【0028】
複数の産業用ロボットを同時に操作する場合、産業用ロボットの可動部の回転軸に接続されたサーボモータ及び産業用ロボットの周辺機器の可動部の回転軸に接続されたサーボモータを同時に駆動する場合、大型又は高速の産業用ロボットを操作する場合等のように、サーボモータの減速駆動時に生じる回生エネルギーが抵抗回生によって処理できる回生エネルギーより大きい場合、コンバータ4がサーボモータ駆動装置2に取り付けられる。それに対し、大型でも高速でもない単一の産業用ロボットを操作する場合等のように、サーボモータの減速駆動時に生じる回生エネルギーが抵抗回生によって処理できる回生エネルギー以下である場合、コンバータ4がサーボモータ駆動装置2に取り付けられない。
【0029】
制御部406は、多ピンコネクタ405を通じた制御部207aとのデータのやり取りを行い、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6のオンオフ動作の制御及び三相交流電源1とコンバータ4との間の配線407に配置されたスイッチ408のオンオフ動作の制御を行う。なお、配線407は、リアクトル409を有する。このために、制御部406は、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってコンバータ4の各種処理を実行する。
【0030】
上位制御装置5は、CNC(数値制御装置)等によって構成され、各種指令を、光ファイバ216aを通じて制御部207aに入力し、制御部207aからのデータを、光ファイバ216aを通じて受信する。
【0031】
コンバータ4がサーボモータ駆動装置2に取り付けられていない場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続していない状態を検出する。そして、サーボモータ300−1,300−2,...,300−mの駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオン状態にする。これによって、コンバータ201aは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−mに供給する。
【0032】
コンバータ4がサーボモータ駆動装置2に取り付けられていない状態でサーボモータ300−1,300−2,...,300−mが減速駆動した場合、制御部207aは、NPN型トランジスタ210aをオン状態にする。これによって、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費する。
【0033】
コンバータ4がコネクタ203a,204a及び多ピンコネクタ205a,206aを介してサーボモータ駆動装置2に取り付けられた場合、制御部207aは、コンバータ4が多ピンコネクタ205a,206aに接続した状態を検出する。そして、サーボモータ300−1,300−2,...,300−mの駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオフ状態にし、制御部406は、制御部207aからのデータに応じてスイッチ408をオン状態にする。これによって、コンバータ4は、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−mに供給する。
【0034】
コンバータ4がサーボモータ駆動装置2に取り付けられた状態でサーボモータ300−1,300−2,...,300−mが減速駆動した場合、制御部207aは、サーボモータ駆動部200aのDCリンク電圧を監視する。
【0035】
DCリンク電圧がサーボモータ300−1,300−2,...,300−mの減速駆動開始直後の電圧を超えた後にサーボモータ駆動装置2に含まれる素子(例えば、平滑コンデンサ214a)の破壊レベルより低い第1の電圧としての電圧V1を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオフ状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを交流電源1側に回生する。
【0036】
DCリンク電圧が電圧V1を越えた後に、電圧V1より高く、かつ、上記破壊レベルより低い第2の電圧としての電圧V2を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを交流電源1側に回生するとともに、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費する。
【0037】
DCリンク電圧が電圧V2を越えた後に、電圧V2より高く、かつ、上記破壊レベルより低い電圧V3を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオフ状態にして回生エネルギーの交流電源1側への回生を中断し、アラーム信号を、多芯ケーブル215a、多ピンコネクタ205a、制御部207a及び光ケーブル216aを通じて上位制御装置5に出力する。
【0038】
本実施の形態によれば、回生エネルギーを交流電源1側に回生するコンバータ4をコネクタ203a,204a及び多ピンコネクタ205aを通じてサーボモータ駆動装置2に着脱自在にしている。したがって、産業用ロボット3が大型又は高速の産業用ロボットであるためにサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーが回生抵抗211aによって処理できる回生エネルギーより大きくなる場合でも、電源回生機能を追加することができる。すなわち、産業用ロボットの操作条件に応じた電源回生機能の追加を行うことができる。
【0039】
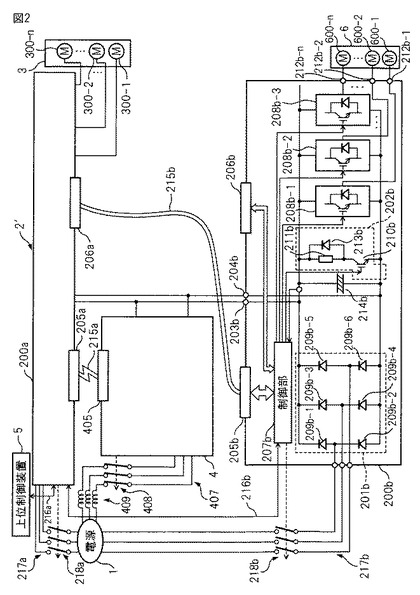
図2は、本発明の第2の実施の形態のモータ制御装置を有するシステムのブロック図である。図2に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2’と、産業用ロボット3,6と、コンバータ4と、上位制御装置5と、を有する。なお、図2において、三相交流電源1、産業用ロボット3及び上位制御装置5は、図1に示した第1の実施の形態の三相交流電源1及び産業用ロボット3と同一構成を有するので、これらの説明を省略する。また、図2において、コンバータ4は、図1に示した第1の実施の形態のコンバータ4と同一構成を有するので、その説明を省略し、多ピンコネクタ405以外のコンバータ4の構成要素を図2に示さない。
【0040】
本実施の形態では、サーボモータ駆動装置2’は、二つのサーボモータ駆動部200a,200bによって構成される。サーボモータ駆動部200aは、図1に示した第1の実施の形態のサーボモータ駆動部200aと同一構成を有するので、その説明を省略し、多ピンコネクタ205a,206a以外のサーボモータ駆動部200aの構成要素を図2に示さない。
【0041】
サーボモータ駆動部200bは、第1のコンバータとしてのコンバータ201bと、回生抵抗回路202bと、第1の接続部を構成するコネクタ203b,204b及び8ピンコネクタのような多ピンコネクタ205b,206bと、制御部207bと、を有する。
【0042】
コンバータ201bは、第1のインバータとしての互いに並列に接続したn(nは任意の自然数)個のインバータ208b−1,208b−2,...,208b−nに直流電力を供給する複数の第1の整流素子としてのブリッジ接続された6個のダイオード209b−1,209b−2,209b−3,209b−4,209b−5,209b−6を有する。インバータ208b−1,208b−2,...,208b−nはそれぞれ、コンバータ201bから供給される直流電力を交流電力に変換する。
【0043】
回生抵抗回路202bは、コンバータ201bに並列に接続され、第1のスイッチング素子としての還流トランジスタであるNPN型トランジスタ(IGBT)210bと、回生抵抗211bと、を有する。回生抵抗211bは、産業用ロボット6の可動部(例えば、アーム)の回転軸に接続されたサーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210bがオン状態であるときに消費する。サーボモータ600−1,600−2,...,600−nは、コネクタ212b−1,212−2,...,212−nを介してインバータ208b−1,208b−2,...,208b−nのそれぞれに直列接続される。本実施の形態では、回生抵抗211bにダイオード213bが並列に接続され、平滑コンデンサ214bがコンバータ201bに並列に接続される。
【0044】
コネクタ203b,204bは、コンバータ4の直流電流出力側に設けられた二つのピン(図示せず)を着脱自在にするように構成され、これら二つのピンがコネクタ203b,203bにそれぞれ装着したときに、コンバータ4から供給される直流電力がインバータ208b−1,208b−2,...,208b−n側に供給されるようにする。多ピンコネクタ205a,206aは、多芯ケーブルを通じて他の部材と接続するために用いられる。本実施の形態では、多ピンコネクタ205bは、制御部207bと制御部207aとの間でデータのやり取りが行えるようにするために多芯ケーブル215bを通じて多ピンコネクタ205aと接続する。
【0045】
制御部207bは、光ファイバ216bを通じた制御部207aとのデータのやり取りの他に、多ピンコネクタ205b、多芯ケーブル215b及び多ピンコネクタ206aを通じた制御部207aとのデータのやり取りを行い、NPN型トランジスタ210bのオンオフ動作の制御、インバータ208b−1,208b−2,...,208b−nの駆動制御及び三相交流電源1とコンバータ201bとの間の配線217bに配置されたスイッチ218bのオンオフ動作の制御を行う。このために、制御部207bは、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってサーボモータ駆動部200bの各種処理を実行する。本実施の形態では、制御部207bは、コンバータ201bの両端間の電圧又はインバータ208b−1,208b−2,...,208b−nの両端間の電圧を検出するために、平滑コンデンサ214bの両端間の電圧すなわちDCリンク電圧を検出する。
【0046】
コンバータ4がサーボモータ駆動装置2’に取り付けられていない場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続していない状態を検出し、サーボモータ300−1,300−2,...,300−mの駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオン状態にする。この際、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205aに接続していない状態を検出し、サーボモータ600−1,600−2,...,600−nの駆動時に、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオン状態にする。これによって、コンバータ201aは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−mに供給し、コンバータ201bは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208b−1,208b−2,...,208b−nに供給する。
【0047】
コンバータ4がサーボモータ駆動装置2’に取り付けられていない状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nが減速駆動した場合、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、NPN型トランジスタ210bをオン状態にする。これによって、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0048】
コンバータ4がコネクタ203a,203b,204a,204b及び多ピンコネクタ205aを介してサーボモータ駆動装置2’に取り付けられた場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続した状態を検出し、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205aに接続した状態を検出する。そして、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの駆動時に、制御部207aは、上位制御装置5からの指令に従ってスイッチ218aをオフ状態にし、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオフ状態にし、制御部406は、制御部207aからのデータに応じて、スイッチ408をオン状態にする。これによって、コンバータ4は、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−m,208b−1,208b−2,...,208b−nに供給する。
【0049】
コンバータ4がサーボモータ駆動装置2’に取り付けられた状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nが減速駆動した場合、制御部207a,207bは、サーボモータ駆動部200a,200bのDCリンク電圧をそれぞれ監視する。
【0050】
DCリンク電圧がサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動開始直後の電圧を超えた後にサーボモータ駆動装置2に含まれる素子(例えば、平滑コンデンサ214a,214b)の破壊レベルより低い第1の電圧としての電圧V1を超えると、制御部405は、制御部207aからのデータに応じて、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオフ状態にし、制御部207bは、制御部207aからのデータに応じて、NPN型トランジスタ210bをオフ状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを交流電源1側に回生する。
【0051】
DCリンク電圧が電圧V1を越えた後に、電圧V1より高く、かつ、上記破壊レベルより低い第2の電圧としての電圧V2を超えると、制御部405は、制御部207aからのデータに応じて、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、制御部207aからのデータに応じて、NPN型トランジスタ210bをオン状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを交流電源1側に回生するとともに、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0052】
DCリンク電圧が電圧V2を越えた後に、電圧V2より高く、かつ、上記破壊レベルより低い電圧V3を超えると、制御部405は、制御部207aからのデータに応じてNPN型トランジスタ402’−1,402’−2,402’−3,402’−4,402’−5,402’−6をオフ状態にして回生エネルギーの交流電源1側への回生を中断し、アラーム信号を、多芯ケーブル215a、多ピンコネクタ205a、制御部207a及び光ケーブル216aを通じて上位制御装置5に出力する。
【0053】
本実施の形態によれば、回生エネルギーを交流電源1側に回生するコンバータ4をコネクタ203a,203b,204a,204b及び多ピンコネクタ205aを通じてサーボモータ駆動装置2’に着脱自在にしている。したがって、二つの産業用ロボット3,6を操作することによりサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーが回生抵抗211a,210bによって処理できる回生エネルギーより大きくなる場合でも、電源回生機能を追加することができる。すなわち、産業用ロボットの操作条件に応じた電源回生機能の追加を行うことができる。
【0054】
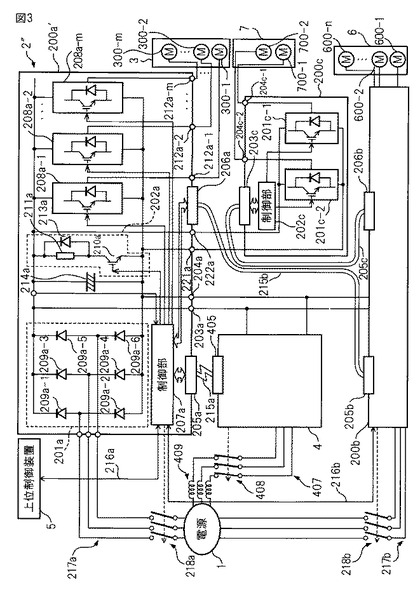
図3は、本発明の第3の実施の形態のモータ制御装置を有するシステムのブロック図である。図3に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2”と、産業用ロボット3,6と、コンバータ4と、上位制御装置5と、産業用ロボット3の周辺装置7と、を有する。なお、図3において、三相交流電源1、産業用ロボット3,6、コンバータ4及び上位制御装置5は、図2に示した第2の実施の形態の三相交流電源1、産業用ロボット3,6及び上位制御装置5と同一構成を有するので、これらの説明を省略する。また、図3において、コンバータ4は、図2に示した第1の実施の形態のコンバータ4と同一構成を有するので、その説明を省略し、多ピンコネクタ405以外のコンバータ4の構成要素を図3に示さない。
【0055】
本実施の形態では、サーボモータ駆動装置2”は、二つのサーボモータ駆動部200a’,200bによって構成される。サーボモータ駆動部200bは、図2に示した第2の実施の形態のサーボモータ駆動部200bと同一構成を有するので、その説明を省略し、多ピンコネクタ205b,206b以外のコンバータ4の構成要素を図3に示さない。
【0056】
サーボモータ駆動部200a’は、コンバータ201a、回生抵抗回路202a、コネクタ203a,204a、多ピンコネクタ205a,206a及び制御部207aの他に、コネクタ221a,222aを有し、コネクタ221a,222aは、多ピンコネクタ223aとともに第2の接続部(インタフェース)を構成する。
【0057】
コネクタ221a,222aは、直流電力を交流電力に変換する第2のインバータとしてのインバータ部200cの直流電流入力側に設けられた二つのピン(図示せず)を着脱自在にするように構成される。インバータ部200cは、周辺装置7の可動部の回転軸に接続されたサーボモータ700−1,700を駆動するインバータ201c−1,201c−2と、制御部202cと、8ピンコネクタのような多ピンコネクタ203cと、を有する。本実施の形態では、サーボモータ700−1,700−2は、コネクタ204c−1,204c−2を介してインバータ201c−1,201c−2のそれぞれに直列接続される。
【0058】
インバータ部200cの直流電流入力側に設けられた二つのピンがコネクタ221a,222aにそれぞれ装着したとき、コンバータ201a又はコンバータ4から出力される直流電流は、インバータ201c−1,201c−2に供給される。多ピンコネクタ203cは、制御部207aと制御部202cとの間でデータのやり取りが行えるようにするために多芯ケーブル205cを通じて多ピンコネクタ206bに接続する。制御部202cは、多ピンコネクタ203c、多芯ケーブル205c、制御部207b、多ピンコネクタ205b、多心ケーブル215b及び多ピンコネクタ206aを通じた制御部207aとのデータのやり取りを行い、インバータ201c−1,201c−2の駆動制御を行う。このために、制御部202cは、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってインバータ部200cの各種処理を実行する。
【0059】
コンバータ4がサーボモータ駆動装置2”に取り付けられていない場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続していない状態を検出し、サーボモータ300−1,300−2,...,300−m,700−1,700−2の駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオン状態にする。この際、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205bに接続していない状態を検出し、サーボモータ600−1,600−2,...,600−nの駆動時に、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオン状態にする。これによって、コンバータ201aは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−m,201c−1,201c−2に供給し、コンバータ201bは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208b−1,208b−2,...,208b−nに供給する。
【0060】
コンバータ4がサーボモータ駆動装置2”に取り付けられていない状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2が減速駆動した場合、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、制御部207aからのデータに応じて、NPN型トランジスタ210bをオン状態にする。これによって、回生抵抗211aは、サーボモータ300−1,300−2,...,300−m,700−1,700−2の減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0061】
コンバータ4がコネクタ203a,203b,204a,204b及び多ピンコネクタ205aを介してサーボモータ駆動装置2”に取り付けられた場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続した状態を検出し、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205bに接続した状態を検出する。そして、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の駆動時に、制御部207aは、上位制御装置5からの指令に従ってスイッチ218aをオフ状態にし、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオフ状態にし、制御部406は、制御部207aからのデータに応じて、スイッチ408をオン状態にする。これによって、コンバータ4は、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ201c−1,201c−2,207a−1,207a−2,...,207a−m,207b−1,207b−2,...,207b−nに供給する。
【0062】
コンバータ4がサーボモータ駆動装置2”に取り付けられた状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2が減速駆動した場合、制御部207a,206bは、サーボモータ駆動部200a,200bのDCリンク電圧をそれぞれ監視する。
【0063】
DCリンク電圧がサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動開始直後の電圧を超えた後にサーボモータ駆動装置2に含まれる素子(例えば、平滑コンデンサ214a,214b)の破壊レベルより低い第1の電圧としての電圧V1を超えると、制御部406は、制御部207a,206bからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,401−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオフ状態にし、制御部207bは、NPN型トランジスタ210bをオフ状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動時に生じる回生エネルギーを交流電源1側に回生する。
【0064】
DCリンク電圧が電圧V1を越えた後に、電圧V1より高く、かつ、上記破壊レベルより低い第2の電圧としての電圧V2を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、NPN型トランジスタ210bをオン状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動時に生じる回生エネルギーを交流電源1側に回生するとともに、回生抵抗211aは、サーボモータ300−1,300−2,...,300−m,700−1,700−2の減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0065】
DCリンク電圧が電圧V2を越えた後に、電圧V2より高く、かつ、上記破壊レベルより低い電圧V3を超えると、制御部406は、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオフ状態にして回生エネルギーの交流電源1側への回生を中断し、アラーム信号を上位制御装置5に出力する。
【0066】
本実施の形態によれば、回生エネルギーを交流電源1側に回生するコンバータ4をコネクタ203a,203b,204a,204b及び多ピンコネクタ206aを通じてサーボモータ駆動装置2”に着脱自在にしている。したがって、二つの産業用ロボット3,6及び周辺装置7を操作することによりサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動時に生じる回生エネルギーが回生抵抗211a,211bによって処理できる回生エネルギーより大きくなる場合でも、電源回生機能を追加することができる。すなわち、産業用ロボットの操作条件に応じた電源回生機能の追加を行うことができる。
【0067】
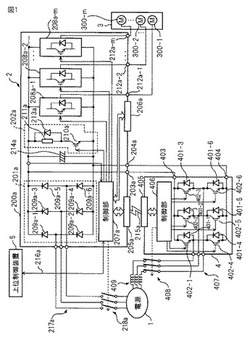
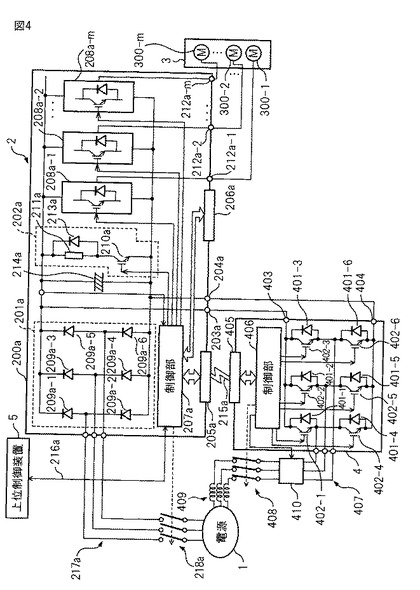
図4は、本発明の第4の実施の形態のモータ制御装置を有するシステムのブロック図である。図4に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2と、産業用ロボット3と、コンバータ4と、上位制御装置5と、を有する。なお、図4において、三相交流電源1、サーボモータ駆動装置2、産業用ロボット3、コンバータ4及び上位制御装置5は、図1に示した第1の実施の形態の三相交流電源1、サーボモータ駆動装置2、産業用ロボット3、コンバータ4及び上位制御装置5と同一構成を有するので、これらの説明を省略する。
【0068】
本実施の形態では、交流電源1とコンバータ4との間にコンタクタ410が配置され、コンバータ4が回生エネルギーを交流電源1側に回生しているときにコンタクタ410の遮断を検出した場合、制御部406は、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオフ状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にする。制御部406は、回生エネルギーを交流電源1側に回生できないためにコンタクタ410が遮断されたか否かを検出するために、例えば、ユーザの操作による上位制御装置5を通じた非常停止指令を受信し、制御部406からオフ指令を受信し、制御部406によるコンタクタ408の補助接点を監視する。
【0069】
本実施の形態によれば、コンタクタ410が遮断されているために回生エネルギーを交流電源1側に回生できないときに電源回生を中断できるので、モータ300−1,300−2,...,300−mを安全に減速停止させることができる。
【0070】
本発明は、上記実施の形態に限定されるものではなく、幾多の変更及び変形が可能である。例えば、交流電源として、三相交流電源以外の交流電源を用いることができる。また、上記実施の形態において一つ又は二つのサーボモータ駆動部を有する、サーボモータ駆動装置について説明したが、三つ以上のサーボモータ駆動部を有するサーボモータ駆動装置も本発明に適用することができる。
【0071】
また、上記実施の形態において、一つの周辺装置を有するサーボモータ駆動装置について説明したが、二つ以上の周辺装置を有するサーボモータ駆動装置も本発明に適用することができる。
【0072】
さらに、上記実施の形態において、スイッチを配置した配線を用いる場合について説明したが、配線として、交流電源と第1のコンバータ又は第2のコンバータとをつなぐケーブルを用いることができる。この場合、ケーブルが交流電源と第1のコンバータとをつなぐときには、交流電源から第1のコンバータに交流電源を供給し、ケーブルが交流電源と第2のコンバータをつなぐときには交流電源から第2のコンバータに交流電源を供給する。
【符号の説明】
【0073】
1 三相交流電源
2、2’,2” サーボモータ駆動装置
3,6 産業用ロボット
4,4’,201a,201b コンバータ
5 上位制御装置
7 周辺装置
200a,200a’,200b サーボモータ駆動部
200c インバータ部
202a,202b 回生抵抗回路
203a,203b,204a,204b,204c−1,204c−2,403,404,212a−1,212a−2,...,212a−m,212b−1,212b−2,...,212b−n,221a,222a コネクタ
203c,205a,205b,206a,206b 多ピンコネクタ
202c,207a,207b,406, 制御部
201c−1,201c−2,208a−1,208a−2,...,208a−m,208b−1,208b−2,...,208b−n インバータ
209a−1,209a−2,209a−3,209a−4,209a−5,209a−6,209b−1,209b−2,209b−3,209b−4,209b−5,209b−6,213a,213b,401−1,401−2,401−3,401−4,401−5,401−6 ダイオード
210a,210b,402−1,402−2,402−3,402−4,402−5,402−6 NPN型トランジスタ
211a,211b 回生抵抗
214a,214b 平滑コンデンサ
216a,216b 光ケーブル
217a,217b,407 配線
218a,218b,408 スイッチ
300−1,300−2、...,300−m,600−1,600−2,...,600−n,700−1,700−2 サーボモータ
409 リアクトル
410 コンタクタ
【技術分野】
【0001】
本発明は、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを交流電源側に回生する電源回生機能を産業用ロボットの操作条件に応じて追加することができる電源回生サーボモータ駆動装置に関する。
【背景技術】
【0002】
従来、サーボモータの減速駆動時に生じる回生エネルギーを処理するために、回生エネルギーを回生抵抗によって消費する抵抗回生機能を有するサーボモータ駆動装置と、回生エネルギーを交流電源側に回生する電源回生機能を有するサーボモータ駆動装置とが用いられている。
【0003】
抵抗回生機能を有するサーボモータ駆動装置は、交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換するインバータに直流電力を供給する複数のダイオードを有するコンバータと、スイッチング素子(例えば、NPN型トランジスタ)及び回生抵抗の直列接続を有する回生抵抗回路と、を有する。
【0004】
電源回生機能を有するサーボモータ駆動装置は、複数のダイオードの他に複数のダイオードのそれぞれに並列に接続された、ダイオードと同数のスイッチング素子を有するコンバータを有する。
【0005】
抵抗回生機能を有するサーボモータ駆動装置のコンバータは、スイッチング素子を有さないので、電源回生機能を有するサーボモータ駆動装置よりも装置の小型化に有利である。一方、電源回生機能を有するサーボモータ駆動装置は、抵抗回生機能を有するサーボモータ駆動装置よりも多くの量の回生エネルギーを消費することができる。
【0006】
産業用ロボットの可動部(例えば、アーム)の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーは、通常、工作機械又は産業機械の可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーより小さく、抵抗回生によって十分対処することができる。したがって、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動する場合、装置の小型化に有利な抵抗回生機能を有するサーボモータ駆動装置が一般的に用いられる。
【0007】
しかしながら、複数の産業用ロボットを同時に操作する場合、産業用ロボットの可動部の回転軸に接続されたサーボモータ及び産業用ロボットの周辺機器の可動部の回転軸に接続されたサーボモータを同時に駆動する場合、大型又は高速の産業用ロボットを操作する場合等において、サーボモータの減速駆動時に生じる回生エネルギーは、抵抗回生によって処理できる回生エネルギーより大きくなるときがある。この場合、生じた回生エネルギーを処理できるようにするために、抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置が用いられる。抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置は、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータと、回生抵抗回路と、を有する。
【0008】
従来、抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置として、回生エネルギーが所定の量以下のときには電源回生のみを行い、回生エネルギーが所定の量を超えると電源回生と抵抗回生の両方を行うサーボモータ駆動装置(例えば、特許文献1〜3)、瞬時停電が発生した場合に電源回生を終了するとともに抵抗回生を開始するサーボモータ駆動装置(例えば、特許文献4)等が提案されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】実開昭62−26192号公報
【特許文献2】特開2004−154961号公報
【特許文献3】特開2011−101473号公報
【特許文献4】特開2011−101474号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動する場合、操作する産業用ロボットの個数、産業用ロボットと同時に使用される周辺装置の有無、産業用ロボットの大きさ又は速度等の産業用ロボットの操作条件に応じて、回生エネルギーの処理の際に抵抗回生機能のみで十分であるか抵抗回生機能と電源回生機能の両方を必要とするかが決定される。すなわち、回生エネルギーの処理の際に抵抗回生機能のみで十分である場合には、複数のダイオードを有するコンバータと、回生抵抗回路とを用いて装置の小型化を実現し、回生エネルギーの処理の際に抵抗回生機能と電源回生機能の両方を必要とする場合には、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータと、回生抵抗回路とを用いて電源回生を行うことが所望される。
【0011】
しかしながら、従来の抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置では、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータが予め装備されているので、回生エネルギーの処理の際に抵抗回生機能のみで十分である場合でも、複数のダイオード及びそれと同数のスイッチング素子を有するコンバータが用いられる。したがって、従来の抵抗回生機能と電源回生機能の両方を有するサーボモータ駆動装置では、電源回生機能を産業用ロボットの操作条件に応じて追加することができない。
【0012】
本発明の目的は、電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供することである。
【課題を解決するための手段】
【0013】
本発明によるサーボモータ駆動装置は、交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、第1のコンバータに並列に接続され、第1のスイッチング素子と、第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、を有し、第2のコンバータは、交流電源からの交流電流を直流電流に変換し、第1のインバータに直流電力を供給する複数の第2の整流素子と、複数の第2の整流素子のそれぞれに並列に接続された複数の第2の整流素子と同数の第2のスイッチング素子と、第2のコンバータが第1の接続部に接続された場合、第2のスイッチング素子をオン状態にして、回生エネルギーを交流電源側に回生する第2の制御部と、を有する。
【0014】
本発明による他のサーボモータ駆動装置は、複数のサーボモータ駆動部を有し、複数のサーボモータ駆動部はそれぞれ、交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、第1のコンバータに並列に接続され、第1のスイッチング素子と、第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、を有し、第2のコンバータは、交流電源からの交流電流を直流電流に変換し、第1のインバータに直流電力を供給する複数の第2の整流素子と、複数の第2の整流素子のそれぞれに並列に接続された複数の第2の整流素子と同数の第2のスイッチング素子と、第2のコンバータが複数のサーボモータ駆動部の全ての第1の接続部に接続された場合、第2のスイッチング素子をオン状態にして、回生エネルギーを交流電源側に回生する第2の制御部と、を有する。
【0015】
好適には、直流電力を交流電力に変換する第2のインバータに接続される、産業用ロボットの周辺機器の回転軸に接続されたサーボモータの回転軸に着脱自在に接続する第2の接続部を更に有する。
【0016】
好適には、第2のコンバータが第1の接続部に接続され、かつ、第1のインバータの両端間の電圧又は第2のコンバータの両端の電圧が、サーボモータの減速駆動開始直後の電圧を超えるとともにサーボモータ駆動装置に含まれる素子の破壊レベルの電圧よりも低い第1の電圧と、第1の電圧を超えるとともに破壊レベルの電圧よりも低い第2の電圧との間にある間、第1の制御部は、第1のスイッチング素子をオフ状態にし、第2の制御部は、第2のスイッチング素子をオン状態にする。
【0017】
好適には、第1のインバータの両端間の電圧又は第2のコンバータの両端間の電圧が第2の電圧を超えて破壊レベルの電圧に到達するまでの間、第1の制御部は、第1のスイッチング素子をオン状態にし、第2の制御部は、第2のスイッチング素子をオン状態にする。
【0018】
好適には、交流電源と第2のコンバータとの間に配置されたコンタクタの遮断を、第2のコンバータが回生エネルギーを交流電源側に回生しているときに検出した場合、第2の制御部は、第2のスイッチング素子をオフ状態にする。
【発明の効果】
【0019】
本発明によれば、回生エネルギーを交流電源側に回生する第2のコンバータを第1の接続部を通じてサーボモータ駆動装置に着脱自在にしているので、電源回生機能を産業用ロボットの操作条件に応じて追加することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【図2】本発明の第2の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【図3】本発明の第3の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【図4】本発明の第4の実施の形態のサーボモータ駆動装置を有するシステムのブロック図である。
【発明を実施するための形態】
【0021】
本発明によるサーボモータ駆動装置の実施の形態を、図面を参照しながら説明する。なお、図面中、同一構成要素には同一符号を付す。
図1は、本発明の第1の実施の形態のモータ制御装置を有するシステムのブロック図である。図1に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2と、産業用ロボット3と、第2のコンバータとしてのコンバータ4と、上位制御装置5と、を有する。
【0022】
本実施の形態では、サーボモータ駆動装置2は、一つのサーボモータ駆動部200aによって構成される。サーボモータ駆動部200aは、第1のコンバータとしてのコンバータ201aと、回生抵抗回路202aと、第1の接続部(インタフェース)を構成するコネクタ203a,204a及び8ピンコネクタのような多ピンコネクタ205a,206aと、制御部207aと、を有する。
【0023】
コンバータ201aは、第1のインバータとしての互いに並列に接続したm(mは任意の自然数)個のインバータ208a−1,208a−2,,,,,208a−mに直流電力を供給する複数の第1の整流素子としてのブリッジ接続された6個のダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有する。インバータ208a−1,208a−2,,,,,208a−mはそれぞれ、コンバータ201aから供給される直流電力を交流電力に変換する。
【0024】
回生抵抗回路202aは、コンバータ201aに並列に接続され、第1のスイッチング素子としての還流トランジスタであるNPN型トランジスタ(IGBT)210aと、回生抵抗211aと、を有する。回生抵抗211aは、産業用ロボット3の可動部(例えば、アーム)の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する。サーボモータ300−1,300−2,...,300−mは、コネクタ212a−1,212a−2,...,212a−mを介してインバータ208a−1,208a−2,,,,,208a−mのそれぞれに直列接続される。本実施の形態では、回生抵抗211aにダイオード213aが並列に接続され、平滑コンデンサ214aがコンバータ201aに並列に接続される。
【0025】
コネクタ203a,204aは、コンバータ4の直流電流出力側に設けられた二つのピン(図示せず)を着脱自在にするように構成され、これら二つのピンがコネクタ203a,203bにそれぞれ装着したときに、コンバータ4から供給される直流電力がインバータ208a−1,208a−2,,,,,208a−m側に供給されるようにする。多ピンコネクタ205a,206aは、多芯ケーブルを通じて他の部材と接続するために用いられる。本実施の形態では、多ピンコネクタ205aは、制御部207aとコンバータ4との間でデータのやり取りが行えるようにするために多芯ケーブル215aを通じてサーボモータ駆動部200aとコンバータ4とを接続する。
【0026】
制御部207aは、光ケーブル216aを通じた上位制御装置5とのデータのやり取りの他に、多ピンコネクタ205aを通じたコンバータ4とのデータのやり取りを行い、NPN型トランジスタ210aのオンオフ動作の制御、インバータ208a−1,208a−2,,,,,208a−mの駆動制御及び三相交流電源1とコンバータ201aとの間の配線217aに配置されたスイッチ218aのオンオフ動作の制御を行う。このために、制御部207aは、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってサーボモータ駆動部200aの各種処理を実行する。本実施の形態では、制御部207aは、コンバータ4の両端間の電圧、コンバータ201aの両端間の電圧又はインバータ208a−1,208a−2,,,,,208a−mの両端間の電圧を検出するために、平滑コンデンサ214aの両端間の電圧すなわちDCリンク電圧を検出する。
【0027】
コンバータ4は、コネクタ203a,204a及び多ピンコネクタ205a,206aに対して着脱自在であり、交流電源1からの交流電流を直流電流に変換する。このために、コンバータ4は、インバータ208a−1,208a−2,,,,,208a−mに直流電力を供給する複数の第2の整流素子としてのブリッジ接続された6個のダイオード401−1,401−2,401−3,401−4,401−5,401−6と、ダイオード401−1,401−2,401−3,401−4,401−5,401−6のそれぞれに並列に接続された第2のスイッチング素子としてのNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6と、コネクタ203aに対応するコネクタ403と、コネクタ204aに対応するコネクタ404と、多芯ケーブル215aを通じて多ピンコネクタ205aに接続する多ピンコネクタ405と、第2の制御部としての制御部406と、を有する。
【0028】
複数の産業用ロボットを同時に操作する場合、産業用ロボットの可動部の回転軸に接続されたサーボモータ及び産業用ロボットの周辺機器の可動部の回転軸に接続されたサーボモータを同時に駆動する場合、大型又は高速の産業用ロボットを操作する場合等のように、サーボモータの減速駆動時に生じる回生エネルギーが抵抗回生によって処理できる回生エネルギーより大きい場合、コンバータ4がサーボモータ駆動装置2に取り付けられる。それに対し、大型でも高速でもない単一の産業用ロボットを操作する場合等のように、サーボモータの減速駆動時に生じる回生エネルギーが抵抗回生によって処理できる回生エネルギー以下である場合、コンバータ4がサーボモータ駆動装置2に取り付けられない。
【0029】
制御部406は、多ピンコネクタ405を通じた制御部207aとのデータのやり取りを行い、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6のオンオフ動作の制御及び三相交流電源1とコンバータ4との間の配線407に配置されたスイッチ408のオンオフ動作の制御を行う。なお、配線407は、リアクトル409を有する。このために、制御部406は、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってコンバータ4の各種処理を実行する。
【0030】
上位制御装置5は、CNC(数値制御装置)等によって構成され、各種指令を、光ファイバ216aを通じて制御部207aに入力し、制御部207aからのデータを、光ファイバ216aを通じて受信する。
【0031】
コンバータ4がサーボモータ駆動装置2に取り付けられていない場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続していない状態を検出する。そして、サーボモータ300−1,300−2,...,300−mの駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオン状態にする。これによって、コンバータ201aは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−mに供給する。
【0032】
コンバータ4がサーボモータ駆動装置2に取り付けられていない状態でサーボモータ300−1,300−2,...,300−mが減速駆動した場合、制御部207aは、NPN型トランジスタ210aをオン状態にする。これによって、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費する。
【0033】
コンバータ4がコネクタ203a,204a及び多ピンコネクタ205a,206aを介してサーボモータ駆動装置2に取り付けられた場合、制御部207aは、コンバータ4が多ピンコネクタ205a,206aに接続した状態を検出する。そして、サーボモータ300−1,300−2,...,300−mの駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオフ状態にし、制御部406は、制御部207aからのデータに応じてスイッチ408をオン状態にする。これによって、コンバータ4は、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−mに供給する。
【0034】
コンバータ4がサーボモータ駆動装置2に取り付けられた状態でサーボモータ300−1,300−2,...,300−mが減速駆動した場合、制御部207aは、サーボモータ駆動部200aのDCリンク電圧を監視する。
【0035】
DCリンク電圧がサーボモータ300−1,300−2,...,300−mの減速駆動開始直後の電圧を超えた後にサーボモータ駆動装置2に含まれる素子(例えば、平滑コンデンサ214a)の破壊レベルより低い第1の電圧としての電圧V1を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオフ状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを交流電源1側に回生する。
【0036】
DCリンク電圧が電圧V1を越えた後に、電圧V1より高く、かつ、上記破壊レベルより低い第2の電圧としての電圧V2を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを交流電源1側に回生するとともに、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費する。
【0037】
DCリンク電圧が電圧V2を越えた後に、電圧V2より高く、かつ、上記破壊レベルより低い電圧V3を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオフ状態にして回生エネルギーの交流電源1側への回生を中断し、アラーム信号を、多芯ケーブル215a、多ピンコネクタ205a、制御部207a及び光ケーブル216aを通じて上位制御装置5に出力する。
【0038】
本実施の形態によれば、回生エネルギーを交流電源1側に回生するコンバータ4をコネクタ203a,204a及び多ピンコネクタ205aを通じてサーボモータ駆動装置2に着脱自在にしている。したがって、産業用ロボット3が大型又は高速の産業用ロボットであるためにサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーが回生抵抗211aによって処理できる回生エネルギーより大きくなる場合でも、電源回生機能を追加することができる。すなわち、産業用ロボットの操作条件に応じた電源回生機能の追加を行うことができる。
【0039】
図2は、本発明の第2の実施の形態のモータ制御装置を有するシステムのブロック図である。図2に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2’と、産業用ロボット3,6と、コンバータ4と、上位制御装置5と、を有する。なお、図2において、三相交流電源1、産業用ロボット3及び上位制御装置5は、図1に示した第1の実施の形態の三相交流電源1及び産業用ロボット3と同一構成を有するので、これらの説明を省略する。また、図2において、コンバータ4は、図1に示した第1の実施の形態のコンバータ4と同一構成を有するので、その説明を省略し、多ピンコネクタ405以外のコンバータ4の構成要素を図2に示さない。
【0040】
本実施の形態では、サーボモータ駆動装置2’は、二つのサーボモータ駆動部200a,200bによって構成される。サーボモータ駆動部200aは、図1に示した第1の実施の形態のサーボモータ駆動部200aと同一構成を有するので、その説明を省略し、多ピンコネクタ205a,206a以外のサーボモータ駆動部200aの構成要素を図2に示さない。
【0041】
サーボモータ駆動部200bは、第1のコンバータとしてのコンバータ201bと、回生抵抗回路202bと、第1の接続部を構成するコネクタ203b,204b及び8ピンコネクタのような多ピンコネクタ205b,206bと、制御部207bと、を有する。
【0042】
コンバータ201bは、第1のインバータとしての互いに並列に接続したn(nは任意の自然数)個のインバータ208b−1,208b−2,...,208b−nに直流電力を供給する複数の第1の整流素子としてのブリッジ接続された6個のダイオード209b−1,209b−2,209b−3,209b−4,209b−5,209b−6を有する。インバータ208b−1,208b−2,...,208b−nはそれぞれ、コンバータ201bから供給される直流電力を交流電力に変換する。
【0043】
回生抵抗回路202bは、コンバータ201bに並列に接続され、第1のスイッチング素子としての還流トランジスタであるNPN型トランジスタ(IGBT)210bと、回生抵抗211bと、を有する。回生抵抗211bは、産業用ロボット6の可動部(例えば、アーム)の回転軸に接続されたサーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210bがオン状態であるときに消費する。サーボモータ600−1,600−2,...,600−nは、コネクタ212b−1,212−2,...,212−nを介してインバータ208b−1,208b−2,...,208b−nのそれぞれに直列接続される。本実施の形態では、回生抵抗211bにダイオード213bが並列に接続され、平滑コンデンサ214bがコンバータ201bに並列に接続される。
【0044】
コネクタ203b,204bは、コンバータ4の直流電流出力側に設けられた二つのピン(図示せず)を着脱自在にするように構成され、これら二つのピンがコネクタ203b,203bにそれぞれ装着したときに、コンバータ4から供給される直流電力がインバータ208b−1,208b−2,...,208b−n側に供給されるようにする。多ピンコネクタ205a,206aは、多芯ケーブルを通じて他の部材と接続するために用いられる。本実施の形態では、多ピンコネクタ205bは、制御部207bと制御部207aとの間でデータのやり取りが行えるようにするために多芯ケーブル215bを通じて多ピンコネクタ205aと接続する。
【0045】
制御部207bは、光ファイバ216bを通じた制御部207aとのデータのやり取りの他に、多ピンコネクタ205b、多芯ケーブル215b及び多ピンコネクタ206aを通じた制御部207aとのデータのやり取りを行い、NPN型トランジスタ210bのオンオフ動作の制御、インバータ208b−1,208b−2,...,208b−nの駆動制御及び三相交流電源1とコンバータ201bとの間の配線217bに配置されたスイッチ218bのオンオフ動作の制御を行う。このために、制御部207bは、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってサーボモータ駆動部200bの各種処理を実行する。本実施の形態では、制御部207bは、コンバータ201bの両端間の電圧又はインバータ208b−1,208b−2,...,208b−nの両端間の電圧を検出するために、平滑コンデンサ214bの両端間の電圧すなわちDCリンク電圧を検出する。
【0046】
コンバータ4がサーボモータ駆動装置2’に取り付けられていない場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続していない状態を検出し、サーボモータ300−1,300−2,...,300−mの駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオン状態にする。この際、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205aに接続していない状態を検出し、サーボモータ600−1,600−2,...,600−nの駆動時に、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオン状態にする。これによって、コンバータ201aは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−mに供給し、コンバータ201bは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208b−1,208b−2,...,208b−nに供給する。
【0047】
コンバータ4がサーボモータ駆動装置2’に取り付けられていない状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nが減速駆動した場合、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、NPN型トランジスタ210bをオン状態にする。これによって、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0048】
コンバータ4がコネクタ203a,203b,204a,204b及び多ピンコネクタ205aを介してサーボモータ駆動装置2’に取り付けられた場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続した状態を検出し、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205aに接続した状態を検出する。そして、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの駆動時に、制御部207aは、上位制御装置5からの指令に従ってスイッチ218aをオフ状態にし、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオフ状態にし、制御部406は、制御部207aからのデータに応じて、スイッチ408をオン状態にする。これによって、コンバータ4は、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−m,208b−1,208b−2,...,208b−nに供給する。
【0049】
コンバータ4がサーボモータ駆動装置2’に取り付けられた状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nが減速駆動した場合、制御部207a,207bは、サーボモータ駆動部200a,200bのDCリンク電圧をそれぞれ監視する。
【0050】
DCリンク電圧がサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動開始直後の電圧を超えた後にサーボモータ駆動装置2に含まれる素子(例えば、平滑コンデンサ214a,214b)の破壊レベルより低い第1の電圧としての電圧V1を超えると、制御部405は、制御部207aからのデータに応じて、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオフ状態にし、制御部207bは、制御部207aからのデータに応じて、NPN型トランジスタ210bをオフ状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを交流電源1側に回生する。
【0051】
DCリンク電圧が電圧V1を越えた後に、電圧V1より高く、かつ、上記破壊レベルより低い第2の電圧としての電圧V2を超えると、制御部405は、制御部207aからのデータに応じて、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、制御部207aからのデータに応じて、NPN型トランジスタ210bをオン状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを交流電源1側に回生するとともに、回生抵抗211aは、サーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0052】
DCリンク電圧が電圧V2を越えた後に、電圧V2より高く、かつ、上記破壊レベルより低い電圧V3を超えると、制御部405は、制御部207aからのデータに応じてNPN型トランジスタ402’−1,402’−2,402’−3,402’−4,402’−5,402’−6をオフ状態にして回生エネルギーの交流電源1側への回生を中断し、アラーム信号を、多芯ケーブル215a、多ピンコネクタ205a、制御部207a及び光ケーブル216aを通じて上位制御装置5に出力する。
【0053】
本実施の形態によれば、回生エネルギーを交流電源1側に回生するコンバータ4をコネクタ203a,203b,204a,204b及び多ピンコネクタ205aを通じてサーボモータ駆動装置2’に着脱自在にしている。したがって、二つの産業用ロボット3,6を操作することによりサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーが回生抵抗211a,210bによって処理できる回生エネルギーより大きくなる場合でも、電源回生機能を追加することができる。すなわち、産業用ロボットの操作条件に応じた電源回生機能の追加を行うことができる。
【0054】
図3は、本発明の第3の実施の形態のモータ制御装置を有するシステムのブロック図である。図3に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2”と、産業用ロボット3,6と、コンバータ4と、上位制御装置5と、産業用ロボット3の周辺装置7と、を有する。なお、図3において、三相交流電源1、産業用ロボット3,6、コンバータ4及び上位制御装置5は、図2に示した第2の実施の形態の三相交流電源1、産業用ロボット3,6及び上位制御装置5と同一構成を有するので、これらの説明を省略する。また、図3において、コンバータ4は、図2に示した第1の実施の形態のコンバータ4と同一構成を有するので、その説明を省略し、多ピンコネクタ405以外のコンバータ4の構成要素を図3に示さない。
【0055】
本実施の形態では、サーボモータ駆動装置2”は、二つのサーボモータ駆動部200a’,200bによって構成される。サーボモータ駆動部200bは、図2に示した第2の実施の形態のサーボモータ駆動部200bと同一構成を有するので、その説明を省略し、多ピンコネクタ205b,206b以外のコンバータ4の構成要素を図3に示さない。
【0056】
サーボモータ駆動部200a’は、コンバータ201a、回生抵抗回路202a、コネクタ203a,204a、多ピンコネクタ205a,206a及び制御部207aの他に、コネクタ221a,222aを有し、コネクタ221a,222aは、多ピンコネクタ223aとともに第2の接続部(インタフェース)を構成する。
【0057】
コネクタ221a,222aは、直流電力を交流電力に変換する第2のインバータとしてのインバータ部200cの直流電流入力側に設けられた二つのピン(図示せず)を着脱自在にするように構成される。インバータ部200cは、周辺装置7の可動部の回転軸に接続されたサーボモータ700−1,700を駆動するインバータ201c−1,201c−2と、制御部202cと、8ピンコネクタのような多ピンコネクタ203cと、を有する。本実施の形態では、サーボモータ700−1,700−2は、コネクタ204c−1,204c−2を介してインバータ201c−1,201c−2のそれぞれに直列接続される。
【0058】
インバータ部200cの直流電流入力側に設けられた二つのピンがコネクタ221a,222aにそれぞれ装着したとき、コンバータ201a又はコンバータ4から出力される直流電流は、インバータ201c−1,201c−2に供給される。多ピンコネクタ203cは、制御部207aと制御部202cとの間でデータのやり取りが行えるようにするために多芯ケーブル205cを通じて多ピンコネクタ206bに接続する。制御部202cは、多ピンコネクタ203c、多芯ケーブル205c、制御部207b、多ピンコネクタ205b、多心ケーブル215b及び多ピンコネクタ206aを通じた制御部207aとのデータのやり取りを行い、インバータ201c−1,201c−2の駆動制御を行う。このために、制御部202cは、入出力ポート、シリアル通信回路、比較器等を備えたプロセッサによって実現され、図示しないメモリに格納された処理プログラムに従ってインバータ部200cの各種処理を実行する。
【0059】
コンバータ4がサーボモータ駆動装置2”に取り付けられていない場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続していない状態を検出し、サーボモータ300−1,300−2,...,300−m,700−1,700−2の駆動時に、制御部207aは、上位制御装置5から指令に従ってスイッチ218aをオン状態にする。この際、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205bに接続していない状態を検出し、サーボモータ600−1,600−2,...,600−nの駆動時に、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオン状態にする。これによって、コンバータ201aは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208a−1,208a−2,,,,,208a−m,201c−1,201c−2に供給し、コンバータ201bは、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ208b−1,208b−2,...,208b−nに供給する。
【0060】
コンバータ4がサーボモータ駆動装置2”に取り付けられていない状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2が減速駆動した場合、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、制御部207aからのデータに応じて、NPN型トランジスタ210bをオン状態にする。これによって、回生抵抗211aは、サーボモータ300−1,300−2,...,300−m,700−1,700−2の減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0061】
コンバータ4がコネクタ203a,203b,204a,204b及び多ピンコネクタ205aを介してサーボモータ駆動装置2”に取り付けられた場合、制御部207aは、コンバータ4が多ピンコネクタ205aに接続した状態を検出し、制御部207bは、制御部207aからのデータに応じて、コンバータ4が多ピンコネクタ205bに接続した状態を検出する。そして、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の駆動時に、制御部207aは、上位制御装置5からの指令に従ってスイッチ218aをオフ状態にし、制御部207bは、制御部207aからのデータに応じて、スイッチ218bをオフ状態にし、制御部406は、制御部207aからのデータに応じて、スイッチ408をオン状態にする。これによって、コンバータ4は、三相交流電源1からの交流電流を直流電流に変換し、直流電力をインバータ201c−1,201c−2,207a−1,207a−2,...,207a−m,207b−1,207b−2,...,207b−nに供給する。
【0062】
コンバータ4がサーボモータ駆動装置2”に取り付けられた状態でサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2が減速駆動した場合、制御部207a,206bは、サーボモータ駆動部200a,200bのDCリンク電圧をそれぞれ監視する。
【0063】
DCリンク電圧がサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動開始直後の電圧を超えた後にサーボモータ駆動装置2に含まれる素子(例えば、平滑コンデンサ214a,214b)の破壊レベルより低い第1の電圧としての電圧V1を超えると、制御部406は、制御部207a,206bからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,401−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオフ状態にし、制御部207bは、NPN型トランジスタ210bをオフ状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動時に生じる回生エネルギーを交流電源1側に回生する。
【0064】
DCリンク電圧が電圧V1を越えた後に、電圧V1より高く、かつ、上記破壊レベルより低い第2の電圧としての電圧V2を超えると、制御部406は、制御部207aからのデータに応じてNPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオン状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にし、制御部207bは、NPN型トランジスタ210bをオン状態にする。これによって、コンバータ4は、サーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動時に生じる回生エネルギーを交流電源1側に回生するとともに、回生抵抗211aは、サーボモータ300−1,300−2,...,300−m,700−1,700−2の減速駆動時に生じる回生エネルギーを消費し、回生抵抗211bは、サーボモータ600−1,600−2,...,600−nの減速駆動時に生じる回生エネルギーを消費する。
【0065】
DCリンク電圧が電圧V2を越えた後に、電圧V2より高く、かつ、上記破壊レベルより低い電圧V3を超えると、制御部406は、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオフ状態にして回生エネルギーの交流電源1側への回生を中断し、アラーム信号を上位制御装置5に出力する。
【0066】
本実施の形態によれば、回生エネルギーを交流電源1側に回生するコンバータ4をコネクタ203a,203b,204a,204b及び多ピンコネクタ206aを通じてサーボモータ駆動装置2”に着脱自在にしている。したがって、二つの産業用ロボット3,6及び周辺装置7を操作することによりサーボモータ300−1,300−2,...,300−m,600−1,600−2,...,600−n,700−1,700−2の減速駆動時に生じる回生エネルギーが回生抵抗211a,211bによって処理できる回生エネルギーより大きくなる場合でも、電源回生機能を追加することができる。すなわち、産業用ロボットの操作条件に応じた電源回生機能の追加を行うことができる。
【0067】
図4は、本発明の第4の実施の形態のモータ制御装置を有するシステムのブロック図である。図4に示すシステムは、産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するために使用され、三相交流電源1と、サーボモータ駆動装置2と、産業用ロボット3と、コンバータ4と、上位制御装置5と、を有する。なお、図4において、三相交流電源1、サーボモータ駆動装置2、産業用ロボット3、コンバータ4及び上位制御装置5は、図1に示した第1の実施の形態の三相交流電源1、サーボモータ駆動装置2、産業用ロボット3、コンバータ4及び上位制御装置5と同一構成を有するので、これらの説明を省略する。
【0068】
本実施の形態では、交流電源1とコンバータ4との間にコンタクタ410が配置され、コンバータ4が回生エネルギーを交流電源1側に回生しているときにコンタクタ410の遮断を検出した場合、制御部406は、NPN型トランジスタ402−1,402−2,402−3,402−4,402−5,402−6をオフ状態にし、制御部207aは、NPN型トランジスタ210aをオン状態にする。制御部406は、回生エネルギーを交流電源1側に回生できないためにコンタクタ410が遮断されたか否かを検出するために、例えば、ユーザの操作による上位制御装置5を通じた非常停止指令を受信し、制御部406からオフ指令を受信し、制御部406によるコンタクタ408の補助接点を監視する。
【0069】
本実施の形態によれば、コンタクタ410が遮断されているために回生エネルギーを交流電源1側に回生できないときに電源回生を中断できるので、モータ300−1,300−2,...,300−mを安全に減速停止させることができる。
【0070】
本発明は、上記実施の形態に限定されるものではなく、幾多の変更及び変形が可能である。例えば、交流電源として、三相交流電源以外の交流電源を用いることができる。また、上記実施の形態において一つ又は二つのサーボモータ駆動部を有する、サーボモータ駆動装置について説明したが、三つ以上のサーボモータ駆動部を有するサーボモータ駆動装置も本発明に適用することができる。
【0071】
また、上記実施の形態において、一つの周辺装置を有するサーボモータ駆動装置について説明したが、二つ以上の周辺装置を有するサーボモータ駆動装置も本発明に適用することができる。
【0072】
さらに、上記実施の形態において、スイッチを配置した配線を用いる場合について説明したが、配線として、交流電源と第1のコンバータ又は第2のコンバータとをつなぐケーブルを用いることができる。この場合、ケーブルが交流電源と第1のコンバータとをつなぐときには、交流電源から第1のコンバータに交流電源を供給し、ケーブルが交流電源と第2のコンバータをつなぐときには交流電源から第2のコンバータに交流電源を供給する。
【符号の説明】
【0073】
1 三相交流電源
2、2’,2” サーボモータ駆動装置
3,6 産業用ロボット
4,4’,201a,201b コンバータ
5 上位制御装置
7 周辺装置
200a,200a’,200b サーボモータ駆動部
200c インバータ部
202a,202b 回生抵抗回路
203a,203b,204a,204b,204c−1,204c−2,403,404,212a−1,212a−2,...,212a−m,212b−1,212b−2,...,212b−n,221a,222a コネクタ
203c,205a,205b,206a,206b 多ピンコネクタ
202c,207a,207b,406, 制御部
201c−1,201c−2,208a−1,208a−2,...,208a−m,208b−1,208b−2,...,208b−n インバータ
209a−1,209a−2,209a−3,209a−4,209a−5,209a−6,209b−1,209b−2,209b−3,209b−4,209b−5,209b−6,213a,213b,401−1,401−2,401−3,401−4,401−5,401−6 ダイオード
210a,210b,402−1,402−2,402−3,402−4,402−5,402−6 NPN型トランジスタ
211a,211b 回生抵抗
214a,214b 平滑コンデンサ
216a,216b 光ケーブル
217a,217b,407 配線
218a,218b,408 スイッチ
300−1,300−2、...,300−m,600−1,600−2,...,600−n,700−1,700−2 サーボモータ
409 リアクトル
410 コンタクタ
【特許請求の範囲】
【請求項1】
交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、
前記第1のコンバータに並列に接続され、第1のスイッチング素子と、前記第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、前記第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、
前記回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、
前記第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、
を有し、前記第2のコンバータは、
交流電源からの交流電流を直流電流に変換し、前記第1のインバータに直流電力を供給する複数の第2の整流素子と、
前記複数の第2の整流素子のそれぞれに並列に接続された、前記複数の第2の整流素子と同数の第2のスイッチング素子と、
前記第2のコンバータが前記第1の接続部に接続された場合、前記第2のスイッチング素子をオン状態にして、前記回生エネルギーを交流電源側に回生する第2の制御部と、
を有するサーボモータ駆動装置。
【請求項2】
複数のサーボモータ駆動部を有し、前記複数のサーボモータ駆動部はそれぞれ、
交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、
前記第1のコンバータに並列に接続され、第1のスイッチング素子と、前記第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、前記第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、
前記回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、
前記第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、
を有し、前記第2のコンバータは、
交流電源からの交流電流を直流電流に変換し、前記第1のインバータに直流電力を供給する複数の第2の整流素子と、
前記複数の第2の整流素子のそれぞれに並列に接続された前記複数の第2の整流素子と同数の第2のスイッチング素子と、
前記第2のコンバータが前記複数のサーボモータ駆動部の全ての前記第1の接続部に接続された場合、前記第2のスイッチング素子をオン状態にして、前記回生エネルギーを交流電源側に回生する第2の制御部と、
を有するサーボモータ駆動装置。
【請求項3】
直流電力を交流電力に変換する第2のインバータに接続される、産業用ロボットの周辺機器の回転軸に接続されたサーボモータの回転軸に着脱自在に接続する第2の接続部を更に有する請求項1又は2に記載のサーボモータ駆動装置。
【請求項4】
前記第2のコンバータが前記第1の接続部に接続され、かつ、前記第1のインバータの両端間の電圧又は前記第2のコンバータの両端の電圧が、前記サーボモータの減速駆動開始直後の電圧を超えるとともに前記サーボモータ駆動装置に含まれる素子の破壊レベルの電圧よりも低い第1の電圧と、前記第1の電圧を超えるとともに前記破壊レベルの電圧よりも低い第2の電圧との間にある間、前記第1の制御部は、前記第1のスイッチング素子をオフ状態にし、前記第2の制御部は、前記第2のスイッチング素子をオン状態にする請求項1から3のうちのいずれか1項に記載のサーボモータ駆動装置。
【請求項5】
前記第1のインバータの両端間の電圧又は前記第2のコンバータの両端間の電圧が前記第2の電圧を超えて前記破壊レベルの電圧に到達するまでの間、前記第1の制御部は、前記第1のスイッチング素子をオン状態にし、前記第2の制御部は、前記第2のスイッチング素子をオン状態にする請求項4に記載のサーボモータ駆動装置。
【請求項6】
前記交流電源と前記第2のコンバータとの間に配置されたコンタクタの遮断を、前記第2のコンバータが前記回生エネルギーを前記交流電源側に回生しているときに検出した場合、前記第2の制御部は、前記第2のスイッチング素子をオフ状態にする請求項1から5のうちのいずれか1項に記載のサーボモータ駆動装置。
【請求項1】
交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、
前記第1のコンバータに並列に接続され、第1のスイッチング素子と、前記第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、前記第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、
前記回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、
前記第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、
を有し、前記第2のコンバータは、
交流電源からの交流電流を直流電流に変換し、前記第1のインバータに直流電力を供給する複数の第2の整流素子と、
前記複数の第2の整流素子のそれぞれに並列に接続された、前記複数の第2の整流素子と同数の第2のスイッチング素子と、
前記第2のコンバータが前記第1の接続部に接続された場合、前記第2のスイッチング素子をオン状態にして、前記回生エネルギーを交流電源側に回生する第2の制御部と、
を有するサーボモータ駆動装置。
【請求項2】
複数のサーボモータ駆動部を有し、前記複数のサーボモータ駆動部はそれぞれ、
交流電源からの交流電流を直流電流に変換し、直流電力を交流電力に変換する第1のインバータに直流電力を供給する複数の第1の整流素子を有する第1のコンバータと、
前記第1のコンバータに並列に接続され、第1のスイッチング素子と、前記第1のインバータに直列接続される、産業用ロボットの可動部の回転軸に接続されたサーボモータの減速駆動時に生じる回生エネルギーを、前記第1のスイッチング素子がオン状態であるときに消費する回生抵抗と、を有する回生抵抗回路と、
前記回生抵抗回路に並列に第2のコンバータを着脱自在に接続する第1の接続部と、
前記第1のスイッチング素子のオンオフ状態を制御する第1の制御部と、
を有し、前記第2のコンバータは、
交流電源からの交流電流を直流電流に変換し、前記第1のインバータに直流電力を供給する複数の第2の整流素子と、
前記複数の第2の整流素子のそれぞれに並列に接続された前記複数の第2の整流素子と同数の第2のスイッチング素子と、
前記第2のコンバータが前記複数のサーボモータ駆動部の全ての前記第1の接続部に接続された場合、前記第2のスイッチング素子をオン状態にして、前記回生エネルギーを交流電源側に回生する第2の制御部と、
を有するサーボモータ駆動装置。
【請求項3】
直流電力を交流電力に変換する第2のインバータに接続される、産業用ロボットの周辺機器の回転軸に接続されたサーボモータの回転軸に着脱自在に接続する第2の接続部を更に有する請求項1又は2に記載のサーボモータ駆動装置。
【請求項4】
前記第2のコンバータが前記第1の接続部に接続され、かつ、前記第1のインバータの両端間の電圧又は前記第2のコンバータの両端の電圧が、前記サーボモータの減速駆動開始直後の電圧を超えるとともに前記サーボモータ駆動装置に含まれる素子の破壊レベルの電圧よりも低い第1の電圧と、前記第1の電圧を超えるとともに前記破壊レベルの電圧よりも低い第2の電圧との間にある間、前記第1の制御部は、前記第1のスイッチング素子をオフ状態にし、前記第2の制御部は、前記第2のスイッチング素子をオン状態にする請求項1から3のうちのいずれか1項に記載のサーボモータ駆動装置。
【請求項5】
前記第1のインバータの両端間の電圧又は前記第2のコンバータの両端間の電圧が前記第2の電圧を超えて前記破壊レベルの電圧に到達するまでの間、前記第1の制御部は、前記第1のスイッチング素子をオン状態にし、前記第2の制御部は、前記第2のスイッチング素子をオン状態にする請求項4に記載のサーボモータ駆動装置。
【請求項6】
前記交流電源と前記第2のコンバータとの間に配置されたコンタクタの遮断を、前記第2のコンバータが前記回生エネルギーを前記交流電源側に回生しているときに検出した場合、前記第2の制御部は、前記第2のスイッチング素子をオフ状態にする請求項1から5のうちのいずれか1項に記載のサーボモータ駆動装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−102611(P2013−102611A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244769(P2011−244769)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(390008235)ファナック株式会社 (1,110)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(390008235)ファナック株式会社 (1,110)
【Fターム(参考)】
[ Back to top ]