
産業用ロボットの消費電力モニタ装置
【課題】
産業用ロボットにおいて、消費電力の節約に役立てることができるツールが存在しない。
【解決手段】
ロボット制御装置10はマニピュレータ30を駆動するサーボモータに供給される電力を電力検出部23にて検出し、記憶部15は、作業プログラムのステップ毎に、電力検出部23が検出した電力の累積消費電力量を記憶する。モニタ表示部41は、記憶部15が記憶した作業プログラムのステップ毎の累積消費電力量を通知する。作業プログラムのステップ毎に産業用ロボットの消費電力が記憶されて通知されることにしたことによって、急加速や急減速のステップを見直したり、待機時間を減らしたりすることができる。すなわち、タクトタイムとのバランスを取りながら、消費電力を節約することができる。
産業用ロボットにおいて、消費電力の節約に役立てることができるツールが存在しない。
【解決手段】
ロボット制御装置10はマニピュレータ30を駆動するサーボモータに供給される電力を電力検出部23にて検出し、記憶部15は、作業プログラムのステップ毎に、電力検出部23が検出した電力の累積消費電力量を記憶する。モニタ表示部41は、記憶部15が記憶した作業プログラムのステップ毎の累積消費電力量を通知する。作業プログラムのステップ毎に産業用ロボットの消費電力が記憶されて通知されることにしたことによって、急加速や急減速のステップを見直したり、待機時間を減らしたりすることができる。すなわち、タクトタイムとのバランスを取りながら、消費電力を節約することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、産業用ロボットが消費する電力をモニタリングする産業用ロボットの消費電力モニタ装置に関するものである。
【背景技術】
【0002】
従来から、交流電源と負荷との間に電力検出手段を設けて、モニタリングする消費電力モニタ装置が提案されている(特許文献1、特許文献2)。
特許文献1の消費電力モニタ装置では、交流電源と負荷との間に設けられたインバータ装置に対して、前記インバータ装置に流入する交流電力を前記交流電力検出手段によりモニタリングし、制御装置が前記モニタリング結果と初期データと基づいて節電量を演算してその節電量を表示するようにしている。
【0003】
特許文献2の消費電力モニタ装置では、交流電圧を整流し平滑する整流回路と、整流回路の電圧が供給されて1次側巻線の電流断続により2次側に所定電圧を発生する変圧回路と、前記変圧回路の1次側出力電圧のオンオフをスイッチングするスイッチング手段と、前記変圧回路の1次側電圧を調整する電圧調整手段とを備え、電圧調整手段の出力に基づいて前記スイッチング手段のターンオン時間を算出し、該ターンオン時間、スイッチング手段のスイッチング周波数、変圧回路の隠田区タンスに基づいて消費電力を測定する制御手段を備えている。
【0004】
上記の従来技術の消費電力モニタ装置では、時々刻々と変化する消費電力量をモニタリングすることが可能である。そして、これらのモニタリング結果を利用することにより、電気機器の消費電力の節電を行うことが可能となる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−4677号公報
【特許文献2】特開2004−101518号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、産業用ロボットでは、マニピュレータを構成しているアームや外部軸等のアクチュエータを作動させるために複数の電動モータを使用し、種々の作業プログラムに従って作業を行う。この産業用ロボットの消費電力をモニタして、消費電力の節電を行うことが要望されている。
【0007】
しかし、前記消費電力モニタ装置として使用しても、産業用ロボットでは、作業プログラムに従って前記電動モータを制御していることから、単に電動モータに供される電力をモニタしても、節電の可能なところを簡単に知ることはできない。
【0008】
本発明の目的は、作業プログラムのステップ毎に産業用ロボットの消費電力が記憶されて通知されることにより、タクトタイムと消費電力のバランスを取りながら、作業プログラムの修正を行うことが可能な産業用ロボットの消費電力モニタ装置を提供することにある。
【課題を解決するための手段】
【0009】
上記問題点を解決するために、請求項1に記載の発明は、作業プログラムに従って動作する産業用ロボットの消費電力モニタ装置であって、アクチュエータを駆動するサーボモータに供給される電力を検出する電力検出手段と、前記作業プログラムのステップ毎に、前記電力検出手段が検出して累積した累積消費電力量を記憶する記憶手段と、前記記憶手段が記憶した前記作業プログラムのステップ毎の累積消費電力量を通知する通知手段を備えることを特徴とする産業用ロボットの消費電力モニタ装置を要旨としている。
【0010】
請求項2の発明は、請求項1において、前記電力検出手段は、さらに、前記サーボモータに対して電力供給が開始されてからサーボオンがなされるまでの第1サーボオフ時間、及び、サーボオンが解除されるサーボオフがなされてから前記サーボモータに対する電力供給が遮断されるまでの第2サーボオフ時間における消費電力を検出し、前記記憶手段は、前記第1サーボオフ時間および前記第2サーボオフ時間における前記累積消費電力量を記憶することを特徴とする。
【0011】
請求項3の発明は、請求項1又は請求項2において、前記電力検出手段及び記憶手段は、前記アクチュエータを制御するロボット制御装置に設けられ、前記通知手段は、前記ロボット制御装置と通信が可能な可搬式操作装置に設けられた表示手段であり、該表示手段により前記作業プログラムのステップ毎の累積消費電力量を通知することを特徴とする。
【発明の効果】
【0012】
請求項1の発明によれば、作業プログラムのステップ毎に産業用ロボットの累積消費電力量が記憶されて通知されるため、作業者は作業プログラムのステップ毎の累積消費電力量を知ることができる。このため、作業プログラムのどのステップにおいて、累積消費電力量が大きいことが容易に分かるため、作業者はタクトタイムと消費電力のバランスを取りながら、作業プログラムの修正を行うことが可能となる。例えば、作業プログラムのステップにおいて、マニピュレータに急加速や、急減速があるために、そのステップが他のステップよりも累積消費電力量が大きくなっていた場合、タクトタイムに大きく影響がでない範囲で当該ステップの急加速、或いは急減速の程度を変更するように変更すると、累積消費電力量を抑制して節電することが可能となる。
【0013】
請求項2の発明によれば、サーボモータに対する電力供給開始からサーボオンまでの時間であるサーボオフ時間(日々の稼働開始前の待機時間)、及びサーボオンが解除されるサーボオフがなされてから電力供給が遮断される時間であるサーボオフ時間(稼働終了後の待機時間)においての累積消費電力量を作業者は把握できることから、これらの時間の累積消費電力量が大きい場合は、これらの時間を短縮することにより、累積消費電力量を抑制して節電することが可能となる。
【0014】
請求項3の発明によれば、可搬式操作装置の表示手段に作業プログラムの各ステップの累積消費電力量が表示されることにより、請求項1、請求項2の効果を容易に実現することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態の産業ロボットの消費電力モニタ装置を構成するロボット制御装置の機能ブロック図。
【図2】3相交流電源、サーボアンプ、電力検出部のブロック図。
【図3】消費電力演算部が実行する消費電力算出プログラムのフローチャート。
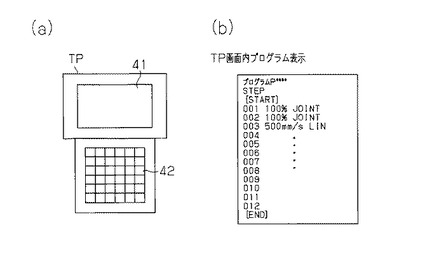
【図4】(a)は、ティーチペンダントの概略正面図、(b)は表示画面に表示されたプログラムの説明図。
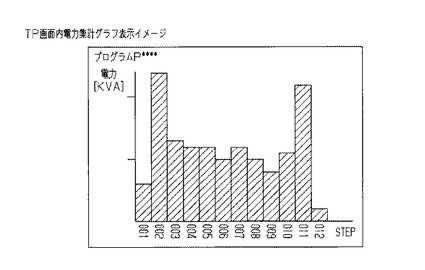
【図5】作業プログラムのステップ毎に集計された消費電力を棒グラフで表示画面に表示した説明図。
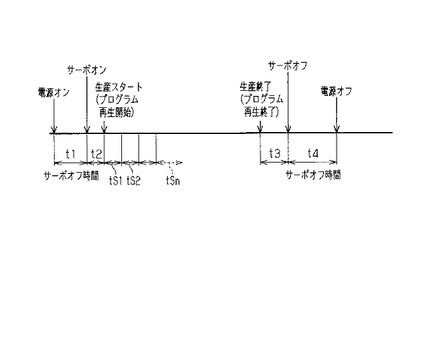
【図6】サーボモータの電源オン、サーボオン、サーボオフ、電源オフのタイムチャート。
【発明を実施するための形態】
【0016】
以下、本発明の産業ロボットの消費電力モニタ装置を、ロボット制御装置10に具体化した一実施形態を図1〜図6を参照して説明する。
図1に示すように、本実施形態の産業用ロボットを制御するロボット制御装置は、例えばアーク溶接ロボットを制御するロボット制御装置10である。なお、産業用ロボットを制御するロボット制御装置は、アーク溶接ロボットを制御するロボット制御装置に限定されるものではなく、他の産業用ロボット、例えばハンドリングロボット、塗装ロボット、搬送ロボット等のロボット制御装置としてもよい。
【0017】
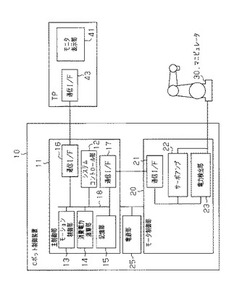
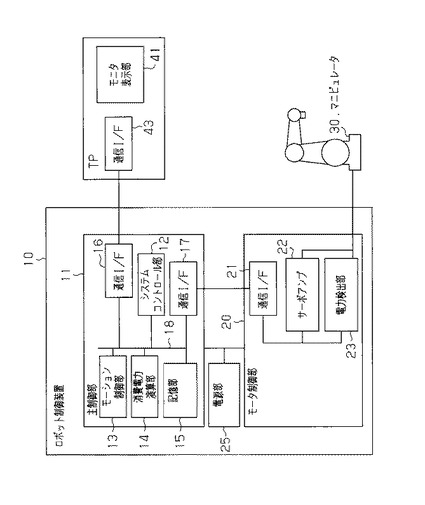
アーク溶接ロボットは、図示しない溶接トーチを備えた6軸の溶接ロボットマニピュレータ(以下、単にマニピュレータという)30である。マニピュレータ30はアクチュエータに相当する。図1に示すようにロボット制御装置10は、主制御部11、主制御部11に接続されたモータ制御部20、及び、主制御部11並びにモータ制御部20に電力を供給する制御装置用の電源部25を備えている。
【0018】
主制御部11は、コンピュータからなり、システムコントロール部12、モーション制御部13、消費電力演算部14、マニピュレータ30の作業プログラム、消費電力算出プログラム等を格納する記憶手段としての記憶部15、通信I/F(インターフェイス)16,17等がバス18を介して接続されている。
【0019】
主制御部11は、可搬式操作装置としてのティーチペンダントTPに通信I/F16を介して通信が可能である。溶接条件(すなわち、溶接電流、溶接電圧等)等の教示データは、ティーチペンダントTPを介して入力される。そして、システムコントロール部12は、入力された教示データを記憶部15に格納する。図1、図4(a)に示すようにティーチペンダントTPは、通知手段及び表示手段としてのモニタ表示部41と、キーや、押しボタン等の入力手段42と、主制御部11の通信I/F16と通信を行う通信I/F43を備えている。
【0020】
モーション制御部13は、記憶部15に格納されたマニピュレータ30の作業プログラムが起動された際、該作業プログラムに従い、通信I/F17を介してモータ制御部20にマニピュレータ30を制御するための制御指令を出力する。
【0021】
消費電力演算部14は、消費電力算出プログラムに従って後述する電力検出手段としての電力検出部23から送信されたモータ電圧値及びモータ電流値に基づいてマニピュレータ30が備えているサーボモータMの消費電力を演算し、その演算した累積結果を累積消費電力量として記憶部15に格納する。記憶部15は例えば、ハードディスク等の書き込み読出し可能な記憶装置により構成されている。
【0022】
モータ制御部20は、図1に示すように、通信I/F17と通信を行う通信I/F21、モーション制御部13からの制御指令に基づき、マニピュレータ30の各アームに設けられたサーボモータM(図2参照)を駆動するサーボアンプ22、及びサーボモータMに3相交流電源51から供給される電力を検出する電力検出部23等を備えている。
【0023】
なお、図2では、説明の便宜上、マニピュレータ30の各軸に設けられた複数のサーボモータのうち、1つのサーボモータMのサーボアンプのみ図示しているが、マニピュレータ30の他のサーボモータについても同様のサーボアンプを備えている。
【0024】
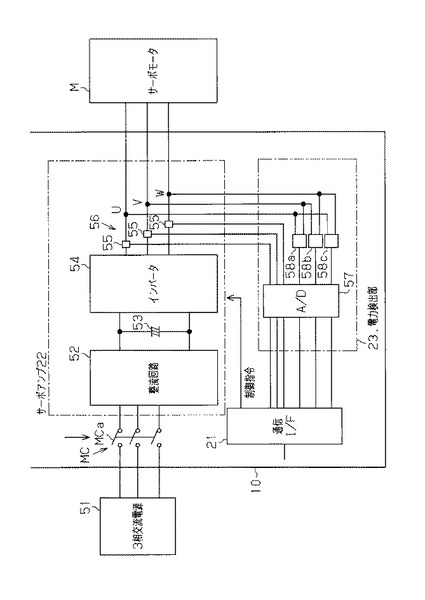
サーボアンプ22は、3相交流電源51から出力される3相交流を整流する整流回路52と、整流回路52の整流出力を平滑する大容量の平滑コンデンサ53と、平滑コンデンサ53により平滑された直流が入力され、該直流を前記制御指令に基づきPWM変換した3相交流をサーボモータMに出力するインバータ54を備えている。図2に示すように3相交流電源51と整流回路52との間は電磁接触器MCの接点MCaを介して接続されている。電磁接触器MCは、図示しない電源操作ボックスに接続されて、電源操作ボックスに設けられた電源スイッチのオン信号又はオフ信号の入力によりオン又はオフが可能である。
【0025】
電力検出部23は、インバータ54よりサーボモータMへ流れるU相,V相,W相の電流値をシャント抵抗55により検出する電流検出部56と、電流検出部56により検出された電流値に比例したアナログ電圧信号をディジタル信号に変換するA/D変換器57を備えている。
【0026】
A/D変換器57は、ディジタル信号に変換した電流値を示すディジタル信号(以下、電流値信号という)を、通信I/F21へ所定のサンプリング周期で出力する。
又、電力検出部23は、サーボアンプ22のインバータ54とサーボモータM間における各相間の電圧を検出する電圧検出回路58a、58b、58cを備えている。電圧検出回路58a、58b、58cは、U相、V相、W相の各相間の電圧を分圧し、各相間の電圧に比例する電圧をA/D変換器57へ出力する。A/D変換器57は、電圧検出回路58a、58b、58cにより検出された電圧をディジタル値に変換し、そのディジタル信号(以下、電圧値信号という)を、通信I/F21へ前記所定のサンプリング周期で出力する。
【0027】
又、モーション制御部13は、通信I/F21及び通信I/F17を介して、入力した電流値信号を電流フィードバック値として取り込み、電流フィードバック値と、該作業プログラムに記述された各種指令とに基づいて所定の演算処理を行って前記制御指令を、インバータ54に出力する。
【0028】
又、通信I/F21は、A/D変換器57が出力した電流値信号と電圧値信号とを通信I/F17を介して消費電力演算部14に送信する。
電力検出部23は、電流検出部56、電圧検出回路58a、58b、58c、A/D変換器57により構成されている。
【0029】
(実施形態の作用)
さて、上記のように構成されたロボット制御装置10の作用を、図3〜図6を参照して説明する。
【0030】
図示しない電源操作ボックスが有する図示しない電源スイッチが操作者によりオン操作されると(以下、この操作のことを単に電源オンといい、逆の操作であるオフ操作のことを電源オフという。)、システムコントロール部12は、そのオン操作に基づいて、電磁接触器MCをオンする。又、消費電力演算部14は、記憶部15に格納している消費電力算出プログラムを起動する。
【0031】
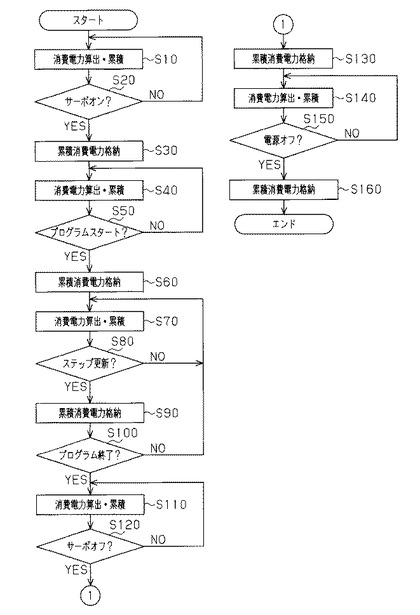
図3は消費電力算出プログラムのフローチャートである。消費電力演算部14は、図3に示すS10では、サーボオン信号が入力されるまでの時間、電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。操作者がティーチペンダントTPの図示しないサーボオンスイッチが操作されてサーボ指令としてのサーボオン信号がティーチペンダントTPからロボット制御装置10に入力されると、S20の判定を「YES」として、S30に移行する。このサーボオン信号により、マニピュレータ30の各サーボモータは、予め設定された位置でサーボロックされる。
【0032】
S30では、消費電力演算部14は、S10で算出し累積した累積消費電力量を、電源オンからサーボオンまでのサーボオフ時間t1(図6参照)における累積消費電力量として、記憶部15に格納した後、S40に移行する。
【0033】
S40では、消費電力演算部14はマニピュレータ30の作業プログラムが起動されるまで、電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。操作者によりマニピュレータ30の作業プログラムのスタート信号がロボット制御装置10に入力されると、消費電力演算部14はS50の判定を「YES」として、S60に移行する。
【0034】
従って、S50からは、作業プログラムの再生が開始され、すなわち、図示しないワークに対してマニピュレータ30により溶接が開始(生産が開始)される。
図4(b)には、モニタ表示部41に表示した作業プログラムP****の例が示されている。この作業プログラムP****では、ステップ毎に、マニピュレータ30が実施すべき作業(処理)のコマンド(指令)、及び、その作業(処理)を行う際に必要な各種パラメータ(例えば移動速度等)が記述されており、モーション制御部13は、ステップ毎のコマンド(指令)とフィードバックに基づいて制御指令をマニピュレータ30に出力する。
【0035】
例えば、図4(b)において、ステップ「001」、及びステップ「002」での「100% JOINT」はマニピュレータ30が出せる最高速度に対する割合を示す100%の速度で、かつステップ「001」及びステップ「002」で教示された目標位置(教示位置)に向かってそれぞれ関節補間(JOINT)で移動することを示している。又、ステップ「003」での「500mm/s LIN」は、ステップ「003」で教示された目標位置(教示位置)に向かって500mm/sの速度で、直線補間(LIN)で移動することを示している。
【0036】
S60では、消費電力演算部14は、S40で算出して累積した累積消費電力量を、サーボオンから作業プログラムが再生スタートするまでの時間t2における累積消費電力量として、記憶部15に格納した後、S70に移行する。
【0037】
S70では、作業プログラムにおいてモーション制御部13が現在処理を行っているステップが終了するまでの間、消費電力演算部14は電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を次のステップに移行するまで累積する。
【0038】
S80では、消費電力演算部14は、作業プログラムにおいて、次のステップに移行したか否かを判定し、次のステップに移行した場合は、「YES」と判定して、S90に移行する。
【0039】
S90では、消費電力演算部14は、S70で算出して累積した累積消費電力量を、作業プログラムのステップの処理期間tSn(n=1,2,……)における累積消費電力量として、記憶部15に格納した後、S100に移行する。
【0040】
S100では、消費電力演算部14は、作業プログラムが終了したか否かを判定する。S100において、作業プログラムが終了していない場合は、次のステップに移行したものとして、S70に戻り、次のステップにおける消費電力の算出及び累積消費電力量を累積する。
【0041】
このため、消費電力演算部14は、作業プログラムの各ステップにおいて、消費電力の算出が行われるとともに累積消費電力量を取得することになる。
S100において、作業プログラムが終了したと判定した場合は、S110に移行して、作業プログラムの再生を終了(すなわち、生産を終了)してからサーボオフ信号が入力されるまでの間、消費電力演算部14は電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。
【0042】
なお、作業プログラムが終了したとき、すなわち、作業プログラムの最終ステップではマニピュレータ30は、予め設定された原点位置に復帰するとともに、サーボモータがサーボロック状態(すなわち、ロボット停止中)となっている。
【0043】
操作者によりサーボオフ信号がロボット制御装置10に入力されると、消費電力演算部14は、S120の判定を「YES」として、S130に移行する。
【0044】
S130では、消費電力演算部14は、S110で算出し累積した累積消費電力量を、作業プログラムの再生終了からサーボオフまでの時間t3(図6参照)における累積消費電力量として、記憶部15に格納した後、S140に移行する。
【0045】
S140では、消費電力演算部14は、電源オフまでの間、電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。
図示しない電源操作ボックスが有する図示しない電源スイッチが操作者によりオフ操作されると、システムコントロール部12は、そのオフ操作に基づいて、電磁接触器MCをオフする。
【0046】
又、前記電源スイッチがオフ操作されると、S150では電源オフか否かの判定を「YES」としてS160に移行し、S160において、消費電力演算部14は、S140で算出し累積した累積消費電力量を、サーボオフから電源オフまでのサーボオフ時間t4(図6参照)における累積消費電力量として、記憶部15に格納した後、このフローチャートを終了する。
【0047】
この後、作業者はティーチペンダントTPの入力手段を操作することにより、作業プログラムのモニタした結果を記憶部15から読み出して、モニタ表示部41に表示させる。
上記作業プログラムの各ステップにおいて取得された累積消費電力量を、ティーチペンダントTPのモニタ表示部41に表示した例を、図5に示す。
【0048】
図5において、横軸は作業プログラムのステップ(STEP)を示し、縦軸は消費電力(KVA)である。又、同図において、横軸において、「001」作業プログラムの最初のステップであり、「012」は最終ステップである。
【0049】
同図に示すように、作業プログラムのステップ毎に、累積消費電力量が棒グラフ化されることにより、どのステップの累積消費電力量が多いか少ないかを容易に知ることができる。例えば、図5において、作業プログラムP****のステップ「002」は、関節補間によりマニピュレータ30が動作して、エアカットしているが、当該ステップにおいて累積消費電力量が他のステップよりも大きいことが分かる。このことから、このステップの移動距離等を見直すことにより消費電力を抑制することができることがわかる。又、作業プログラムのステップ毎に累積消費電力量を示すことができるため、タクトタイムに影響を与えない範囲で、消費電力量を抑制できるのはどのステップか等、好適な判断材料を提供でき、消費電力を抑制した作業プログラムの修正を行うことが可能となる。
【0050】
また、図示はしないが、サーボオフ時間t1,サーボオフ時間t4,時間t2,t3の累積消費電力量を、ティーチペンダントTPのモニタ表示部41に前記ステップと同様に表示算出することによっても、どの時間の累積消費電力量が多いか少ないかを容易に知ることができる。このため、どの時間において、消費電力量を抑制できるかの好適な判断材料を提供でき、消費電力を抑制するためには、例えばいずれか時間帯を短くする等の作業の改善を行うことが可能となる。
【0051】
本実施形態のロボット制御装置10によれば、下記の特徴がある。
(1) 本実施形態のロボット制御装置10は、マニピュレータ30を駆動するサーボモータMに供給される電力を検出する電力検出部23(電力検出手段)と、作業プログラムのステップ毎に、電力検出部23(電力検出手段)が検出して累積消費電力量を記憶する記憶部15(記憶手段)と、記憶部15が記憶した作業プログラムのステップ毎の累積消費電力量を通知するモニタ表示部41(通知手段)を備える。
【0052】
この結果、本実施形態によれば、作業プログラムのステップ毎に産業用ロボットの累積消費電力量が記憶されて通知されるため、作業者は作業プログラムのステップ毎の累積消費電力量を知ることができる。このため、作業プログラムのどのステップにおいて、累積消費電力量が大きいことが容易に分かるため、作業者はタクトタイムと消費電力のバランスを取りながら、作業プログラムの修正を行うことが可能となる。
【0053】
例えば、作業プログラムのステップにおいて、マニピュレータに急加速や急減速があるために、そのステップが他のステップよりも累積消費電力量が大きくなっていた場合、タクトタイムに大きく影響がでない範囲で当該ステップの急加速或いは急減速の程度を変更するように変更すると、累積消費電力量を抑制して節電することが可能となる。
【0054】
(2) 本実施形態のロボット制御装置10は、電力検出部23(電力検出手段)は、サーボモータMに対して電力供給が開始されてからサーボオンがなされるまでのサーボオフ時間t1(第1サーボオフ時間)、及び、サーボオンが解除されるサーボオフがなされてからサーボモータMに対する電力供給が遮断されるまでのサーボオフ時間t4(第2サーボオフ時間)における消費電力を検出し、記憶部15(記憶手段)は、第1サーボオフ時間および第2サーボオフ時間における累積消費電力を記憶する。
【0055】
この結果、本実施形態によれば、電源オンからサーボオンまでのサーボオフ時間t1、及びサーボオンが解除されるサーボオフから電源オフまでのサーボオフ時間t4においての累積消費電力量を作業者は把握できることから、これらの時間の累積消費電力量が大きい場合は、これらの時間を短縮することにより、累積消費電力量を抑制して節電することが可能となる。
【0056】
(3) 本実施形態のロボット制御装置10では、電力検出部23(電力検出手段)及び記憶部15(記憶手段)は、マニピュレータ30を制御するロボット制御装置に設けられ、モニタ表示部41(通知手段)は、ロボット制御装置10と通信が可能な(可搬式操作装置)に設けられた表示手段として構成されて、作業プログラムのステップ毎の累積消費電力量を表示(通知)する。
【0057】
この結果、本実施形態によれば、ティーチペンダントTPのモニタ表示部41に作業プログラムの各ステップの累積消費電力量が表示されることにより、上記(1)、(2)の効果を容易に実現することができる。
【0058】
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
・ 前記実施形態では、サーボオフ時間t1,サーボオフ時間t4,時間t2,t3の累積消費電力量を算出するようにしたが、これらの時間の累積消費電力量の算出する処理の全部又はいずれかの一部を省略してもよい。
【0059】
・ 前記実施形態では、通知手段として、モニタ表示部41としたが、モニタ表示部41の代わりに、或いは、モニタ表示部41の構成にさらに加えて、ロボット制御装置10に接続したプリンタを通知手段としてもよい、通知手段としてプリンタを使用することにより、グラフ化した、或いは表形式で記述した作業プログラムのステップ、或いは、時間帯と、累積消費電力量との関係を作業者に通知することが可能となる。
【0060】
・ 実施形態では、一台のマニピュレータ30と、ロボット制御装置とで説明したが、マニピュレータ30を複数台、共通のロボット制御装置に接続する場合では、マニピュレータ30毎に、電力検出部23を設けるとともに、各電力検出部23が検出した電流、電圧のデータを主制御部11にて集計し、作業プログラムの同一ステップ内において、マニピュレータ30毎の累積消費電力量を記憶部15にそれぞれ記憶して、モニタするようにしてもよい。また、マニピュレータ30以外のアクチュエータ(ポジショナ、スライダ、サーボトーチ、サーボガン等)もモニタするようにしても良いことは言うまでもない。
【0061】
・ 又、工場内の通信ネットワークを利用して、工場内に設置された各マニピュレータに関して、前述の実施形態のようにモニタすれば、温室効果ガスの排出取引に不可欠な節電量の継続的なモニタリングを無理なく行うこともできる。
【符号の説明】
【0062】
MC…電磁接触器、TP…ティーチペンダント(可搬式操作装置)、
10…ロボット制御装置、11…主制御部、12…システムコントロール部、
13…モーション制御部、14…消費電力演算部、15…記憶部(記憶手段)、
16…通信I/F、17…通信I/F、20…モータ制御部、
21…通信I/F、23…電力検出部(電力検出手段)、
25…電源部、30…マニピュレータ、41…モニタ表示部(通知手段)、
42…入力手段、43…通信I/F、50…モータ駆動回路、
51…3相交流電源、52…整流回路、
53…平滑コンデンサ、54…半導体スイッチング回路、
55…シャント抵抗、56…電流検出部、57…A/D変換器、
58a,58b,58c…電圧検出回路。
【技術分野】
【0001】
本発明は、産業用ロボットが消費する電力をモニタリングする産業用ロボットの消費電力モニタ装置に関するものである。
【背景技術】
【0002】
従来から、交流電源と負荷との間に電力検出手段を設けて、モニタリングする消費電力モニタ装置が提案されている(特許文献1、特許文献2)。
特許文献1の消費電力モニタ装置では、交流電源と負荷との間に設けられたインバータ装置に対して、前記インバータ装置に流入する交流電力を前記交流電力検出手段によりモニタリングし、制御装置が前記モニタリング結果と初期データと基づいて節電量を演算してその節電量を表示するようにしている。
【0003】
特許文献2の消費電力モニタ装置では、交流電圧を整流し平滑する整流回路と、整流回路の電圧が供給されて1次側巻線の電流断続により2次側に所定電圧を発生する変圧回路と、前記変圧回路の1次側出力電圧のオンオフをスイッチングするスイッチング手段と、前記変圧回路の1次側電圧を調整する電圧調整手段とを備え、電圧調整手段の出力に基づいて前記スイッチング手段のターンオン時間を算出し、該ターンオン時間、スイッチング手段のスイッチング周波数、変圧回路の隠田区タンスに基づいて消費電力を測定する制御手段を備えている。
【0004】
上記の従来技術の消費電力モニタ装置では、時々刻々と変化する消費電力量をモニタリングすることが可能である。そして、これらのモニタリング結果を利用することにより、電気機器の消費電力の節電を行うことが可能となる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−4677号公報
【特許文献2】特開2004−101518号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、産業用ロボットでは、マニピュレータを構成しているアームや外部軸等のアクチュエータを作動させるために複数の電動モータを使用し、種々の作業プログラムに従って作業を行う。この産業用ロボットの消費電力をモニタして、消費電力の節電を行うことが要望されている。
【0007】
しかし、前記消費電力モニタ装置として使用しても、産業用ロボットでは、作業プログラムに従って前記電動モータを制御していることから、単に電動モータに供される電力をモニタしても、節電の可能なところを簡単に知ることはできない。
【0008】
本発明の目的は、作業プログラムのステップ毎に産業用ロボットの消費電力が記憶されて通知されることにより、タクトタイムと消費電力のバランスを取りながら、作業プログラムの修正を行うことが可能な産業用ロボットの消費電力モニタ装置を提供することにある。
【課題を解決するための手段】
【0009】
上記問題点を解決するために、請求項1に記載の発明は、作業プログラムに従って動作する産業用ロボットの消費電力モニタ装置であって、アクチュエータを駆動するサーボモータに供給される電力を検出する電力検出手段と、前記作業プログラムのステップ毎に、前記電力検出手段が検出して累積した累積消費電力量を記憶する記憶手段と、前記記憶手段が記憶した前記作業プログラムのステップ毎の累積消費電力量を通知する通知手段を備えることを特徴とする産業用ロボットの消費電力モニタ装置を要旨としている。
【0010】
請求項2の発明は、請求項1において、前記電力検出手段は、さらに、前記サーボモータに対して電力供給が開始されてからサーボオンがなされるまでの第1サーボオフ時間、及び、サーボオンが解除されるサーボオフがなされてから前記サーボモータに対する電力供給が遮断されるまでの第2サーボオフ時間における消費電力を検出し、前記記憶手段は、前記第1サーボオフ時間および前記第2サーボオフ時間における前記累積消費電力量を記憶することを特徴とする。
【0011】
請求項3の発明は、請求項1又は請求項2において、前記電力検出手段及び記憶手段は、前記アクチュエータを制御するロボット制御装置に設けられ、前記通知手段は、前記ロボット制御装置と通信が可能な可搬式操作装置に設けられた表示手段であり、該表示手段により前記作業プログラムのステップ毎の累積消費電力量を通知することを特徴とする。
【発明の効果】
【0012】
請求項1の発明によれば、作業プログラムのステップ毎に産業用ロボットの累積消費電力量が記憶されて通知されるため、作業者は作業プログラムのステップ毎の累積消費電力量を知ることができる。このため、作業プログラムのどのステップにおいて、累積消費電力量が大きいことが容易に分かるため、作業者はタクトタイムと消費電力のバランスを取りながら、作業プログラムの修正を行うことが可能となる。例えば、作業プログラムのステップにおいて、マニピュレータに急加速や、急減速があるために、そのステップが他のステップよりも累積消費電力量が大きくなっていた場合、タクトタイムに大きく影響がでない範囲で当該ステップの急加速、或いは急減速の程度を変更するように変更すると、累積消費電力量を抑制して節電することが可能となる。
【0013】
請求項2の発明によれば、サーボモータに対する電力供給開始からサーボオンまでの時間であるサーボオフ時間(日々の稼働開始前の待機時間)、及びサーボオンが解除されるサーボオフがなされてから電力供給が遮断される時間であるサーボオフ時間(稼働終了後の待機時間)においての累積消費電力量を作業者は把握できることから、これらの時間の累積消費電力量が大きい場合は、これらの時間を短縮することにより、累積消費電力量を抑制して節電することが可能となる。
【0014】
請求項3の発明によれば、可搬式操作装置の表示手段に作業プログラムの各ステップの累積消費電力量が表示されることにより、請求項1、請求項2の効果を容易に実現することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態の産業ロボットの消費電力モニタ装置を構成するロボット制御装置の機能ブロック図。
【図2】3相交流電源、サーボアンプ、電力検出部のブロック図。
【図3】消費電力演算部が実行する消費電力算出プログラムのフローチャート。
【図4】(a)は、ティーチペンダントの概略正面図、(b)は表示画面に表示されたプログラムの説明図。
【図5】作業プログラムのステップ毎に集計された消費電力を棒グラフで表示画面に表示した説明図。
【図6】サーボモータの電源オン、サーボオン、サーボオフ、電源オフのタイムチャート。
【発明を実施するための形態】
【0016】
以下、本発明の産業ロボットの消費電力モニタ装置を、ロボット制御装置10に具体化した一実施形態を図1〜図6を参照して説明する。
図1に示すように、本実施形態の産業用ロボットを制御するロボット制御装置は、例えばアーク溶接ロボットを制御するロボット制御装置10である。なお、産業用ロボットを制御するロボット制御装置は、アーク溶接ロボットを制御するロボット制御装置に限定されるものではなく、他の産業用ロボット、例えばハンドリングロボット、塗装ロボット、搬送ロボット等のロボット制御装置としてもよい。
【0017】
アーク溶接ロボットは、図示しない溶接トーチを備えた6軸の溶接ロボットマニピュレータ(以下、単にマニピュレータという)30である。マニピュレータ30はアクチュエータに相当する。図1に示すようにロボット制御装置10は、主制御部11、主制御部11に接続されたモータ制御部20、及び、主制御部11並びにモータ制御部20に電力を供給する制御装置用の電源部25を備えている。
【0018】
主制御部11は、コンピュータからなり、システムコントロール部12、モーション制御部13、消費電力演算部14、マニピュレータ30の作業プログラム、消費電力算出プログラム等を格納する記憶手段としての記憶部15、通信I/F(インターフェイス)16,17等がバス18を介して接続されている。
【0019】
主制御部11は、可搬式操作装置としてのティーチペンダントTPに通信I/F16を介して通信が可能である。溶接条件(すなわち、溶接電流、溶接電圧等)等の教示データは、ティーチペンダントTPを介して入力される。そして、システムコントロール部12は、入力された教示データを記憶部15に格納する。図1、図4(a)に示すようにティーチペンダントTPは、通知手段及び表示手段としてのモニタ表示部41と、キーや、押しボタン等の入力手段42と、主制御部11の通信I/F16と通信を行う通信I/F43を備えている。
【0020】
モーション制御部13は、記憶部15に格納されたマニピュレータ30の作業プログラムが起動された際、該作業プログラムに従い、通信I/F17を介してモータ制御部20にマニピュレータ30を制御するための制御指令を出力する。
【0021】
消費電力演算部14は、消費電力算出プログラムに従って後述する電力検出手段としての電力検出部23から送信されたモータ電圧値及びモータ電流値に基づいてマニピュレータ30が備えているサーボモータMの消費電力を演算し、その演算した累積結果を累積消費電力量として記憶部15に格納する。記憶部15は例えば、ハードディスク等の書き込み読出し可能な記憶装置により構成されている。
【0022】
モータ制御部20は、図1に示すように、通信I/F17と通信を行う通信I/F21、モーション制御部13からの制御指令に基づき、マニピュレータ30の各アームに設けられたサーボモータM(図2参照)を駆動するサーボアンプ22、及びサーボモータMに3相交流電源51から供給される電力を検出する電力検出部23等を備えている。
【0023】
なお、図2では、説明の便宜上、マニピュレータ30の各軸に設けられた複数のサーボモータのうち、1つのサーボモータMのサーボアンプのみ図示しているが、マニピュレータ30の他のサーボモータについても同様のサーボアンプを備えている。
【0024】
サーボアンプ22は、3相交流電源51から出力される3相交流を整流する整流回路52と、整流回路52の整流出力を平滑する大容量の平滑コンデンサ53と、平滑コンデンサ53により平滑された直流が入力され、該直流を前記制御指令に基づきPWM変換した3相交流をサーボモータMに出力するインバータ54を備えている。図2に示すように3相交流電源51と整流回路52との間は電磁接触器MCの接点MCaを介して接続されている。電磁接触器MCは、図示しない電源操作ボックスに接続されて、電源操作ボックスに設けられた電源スイッチのオン信号又はオフ信号の入力によりオン又はオフが可能である。
【0025】
電力検出部23は、インバータ54よりサーボモータMへ流れるU相,V相,W相の電流値をシャント抵抗55により検出する電流検出部56と、電流検出部56により検出された電流値に比例したアナログ電圧信号をディジタル信号に変換するA/D変換器57を備えている。
【0026】
A/D変換器57は、ディジタル信号に変換した電流値を示すディジタル信号(以下、電流値信号という)を、通信I/F21へ所定のサンプリング周期で出力する。
又、電力検出部23は、サーボアンプ22のインバータ54とサーボモータM間における各相間の電圧を検出する電圧検出回路58a、58b、58cを備えている。電圧検出回路58a、58b、58cは、U相、V相、W相の各相間の電圧を分圧し、各相間の電圧に比例する電圧をA/D変換器57へ出力する。A/D変換器57は、電圧検出回路58a、58b、58cにより検出された電圧をディジタル値に変換し、そのディジタル信号(以下、電圧値信号という)を、通信I/F21へ前記所定のサンプリング周期で出力する。
【0027】
又、モーション制御部13は、通信I/F21及び通信I/F17を介して、入力した電流値信号を電流フィードバック値として取り込み、電流フィードバック値と、該作業プログラムに記述された各種指令とに基づいて所定の演算処理を行って前記制御指令を、インバータ54に出力する。
【0028】
又、通信I/F21は、A/D変換器57が出力した電流値信号と電圧値信号とを通信I/F17を介して消費電力演算部14に送信する。
電力検出部23は、電流検出部56、電圧検出回路58a、58b、58c、A/D変換器57により構成されている。
【0029】
(実施形態の作用)
さて、上記のように構成されたロボット制御装置10の作用を、図3〜図6を参照して説明する。
【0030】
図示しない電源操作ボックスが有する図示しない電源スイッチが操作者によりオン操作されると(以下、この操作のことを単に電源オンといい、逆の操作であるオフ操作のことを電源オフという。)、システムコントロール部12は、そのオン操作に基づいて、電磁接触器MCをオンする。又、消費電力演算部14は、記憶部15に格納している消費電力算出プログラムを起動する。
【0031】
図3は消費電力算出プログラムのフローチャートである。消費電力演算部14は、図3に示すS10では、サーボオン信号が入力されるまでの時間、電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。操作者がティーチペンダントTPの図示しないサーボオンスイッチが操作されてサーボ指令としてのサーボオン信号がティーチペンダントTPからロボット制御装置10に入力されると、S20の判定を「YES」として、S30に移行する。このサーボオン信号により、マニピュレータ30の各サーボモータは、予め設定された位置でサーボロックされる。
【0032】
S30では、消費電力演算部14は、S10で算出し累積した累積消費電力量を、電源オンからサーボオンまでのサーボオフ時間t1(図6参照)における累積消費電力量として、記憶部15に格納した後、S40に移行する。
【0033】
S40では、消費電力演算部14はマニピュレータ30の作業プログラムが起動されるまで、電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。操作者によりマニピュレータ30の作業プログラムのスタート信号がロボット制御装置10に入力されると、消費電力演算部14はS50の判定を「YES」として、S60に移行する。
【0034】
従って、S50からは、作業プログラムの再生が開始され、すなわち、図示しないワークに対してマニピュレータ30により溶接が開始(生産が開始)される。
図4(b)には、モニタ表示部41に表示した作業プログラムP****の例が示されている。この作業プログラムP****では、ステップ毎に、マニピュレータ30が実施すべき作業(処理)のコマンド(指令)、及び、その作業(処理)を行う際に必要な各種パラメータ(例えば移動速度等)が記述されており、モーション制御部13は、ステップ毎のコマンド(指令)とフィードバックに基づいて制御指令をマニピュレータ30に出力する。
【0035】
例えば、図4(b)において、ステップ「001」、及びステップ「002」での「100% JOINT」はマニピュレータ30が出せる最高速度に対する割合を示す100%の速度で、かつステップ「001」及びステップ「002」で教示された目標位置(教示位置)に向かってそれぞれ関節補間(JOINT)で移動することを示している。又、ステップ「003」での「500mm/s LIN」は、ステップ「003」で教示された目標位置(教示位置)に向かって500mm/sの速度で、直線補間(LIN)で移動することを示している。
【0036】
S60では、消費電力演算部14は、S40で算出して累積した累積消費電力量を、サーボオンから作業プログラムが再生スタートするまでの時間t2における累積消費電力量として、記憶部15に格納した後、S70に移行する。
【0037】
S70では、作業プログラムにおいてモーション制御部13が現在処理を行っているステップが終了するまでの間、消費電力演算部14は電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を次のステップに移行するまで累積する。
【0038】
S80では、消費電力演算部14は、作業プログラムにおいて、次のステップに移行したか否かを判定し、次のステップに移行した場合は、「YES」と判定して、S90に移行する。
【0039】
S90では、消費電力演算部14は、S70で算出して累積した累積消費電力量を、作業プログラムのステップの処理期間tSn(n=1,2,……)における累積消費電力量として、記憶部15に格納した後、S100に移行する。
【0040】
S100では、消費電力演算部14は、作業プログラムが終了したか否かを判定する。S100において、作業プログラムが終了していない場合は、次のステップに移行したものとして、S70に戻り、次のステップにおける消費電力の算出及び累積消費電力量を累積する。
【0041】
このため、消費電力演算部14は、作業プログラムの各ステップにおいて、消費電力の算出が行われるとともに累積消費電力量を取得することになる。
S100において、作業プログラムが終了したと判定した場合は、S110に移行して、作業プログラムの再生を終了(すなわち、生産を終了)してからサーボオフ信号が入力されるまでの間、消費電力演算部14は電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。
【0042】
なお、作業プログラムが終了したとき、すなわち、作業プログラムの最終ステップではマニピュレータ30は、予め設定された原点位置に復帰するとともに、サーボモータがサーボロック状態(すなわち、ロボット停止中)となっている。
【0043】
操作者によりサーボオフ信号がロボット制御装置10に入力されると、消費電力演算部14は、S120の判定を「YES」として、S130に移行する。
【0044】
S130では、消費電力演算部14は、S110で算出し累積した累積消費電力量を、作業プログラムの再生終了からサーボオフまでの時間t3(図6参照)における累積消費電力量として、記憶部15に格納した後、S140に移行する。
【0045】
S140では、消費電力演算部14は、電源オフまでの間、電力検出部23から送信された電流値信号及び電圧値信号に基づいて消費電力を算出し、その算出結果を累積する。
図示しない電源操作ボックスが有する図示しない電源スイッチが操作者によりオフ操作されると、システムコントロール部12は、そのオフ操作に基づいて、電磁接触器MCをオフする。
【0046】
又、前記電源スイッチがオフ操作されると、S150では電源オフか否かの判定を「YES」としてS160に移行し、S160において、消費電力演算部14は、S140で算出し累積した累積消費電力量を、サーボオフから電源オフまでのサーボオフ時間t4(図6参照)における累積消費電力量として、記憶部15に格納した後、このフローチャートを終了する。
【0047】
この後、作業者はティーチペンダントTPの入力手段を操作することにより、作業プログラムのモニタした結果を記憶部15から読み出して、モニタ表示部41に表示させる。
上記作業プログラムの各ステップにおいて取得された累積消費電力量を、ティーチペンダントTPのモニタ表示部41に表示した例を、図5に示す。
【0048】
図5において、横軸は作業プログラムのステップ(STEP)を示し、縦軸は消費電力(KVA)である。又、同図において、横軸において、「001」作業プログラムの最初のステップであり、「012」は最終ステップである。
【0049】
同図に示すように、作業プログラムのステップ毎に、累積消費電力量が棒グラフ化されることにより、どのステップの累積消費電力量が多いか少ないかを容易に知ることができる。例えば、図5において、作業プログラムP****のステップ「002」は、関節補間によりマニピュレータ30が動作して、エアカットしているが、当該ステップにおいて累積消費電力量が他のステップよりも大きいことが分かる。このことから、このステップの移動距離等を見直すことにより消費電力を抑制することができることがわかる。又、作業プログラムのステップ毎に累積消費電力量を示すことができるため、タクトタイムに影響を与えない範囲で、消費電力量を抑制できるのはどのステップか等、好適な判断材料を提供でき、消費電力を抑制した作業プログラムの修正を行うことが可能となる。
【0050】
また、図示はしないが、サーボオフ時間t1,サーボオフ時間t4,時間t2,t3の累積消費電力量を、ティーチペンダントTPのモニタ表示部41に前記ステップと同様に表示算出することによっても、どの時間の累積消費電力量が多いか少ないかを容易に知ることができる。このため、どの時間において、消費電力量を抑制できるかの好適な判断材料を提供でき、消費電力を抑制するためには、例えばいずれか時間帯を短くする等の作業の改善を行うことが可能となる。
【0051】
本実施形態のロボット制御装置10によれば、下記の特徴がある。
(1) 本実施形態のロボット制御装置10は、マニピュレータ30を駆動するサーボモータMに供給される電力を検出する電力検出部23(電力検出手段)と、作業プログラムのステップ毎に、電力検出部23(電力検出手段)が検出して累積消費電力量を記憶する記憶部15(記憶手段)と、記憶部15が記憶した作業プログラムのステップ毎の累積消費電力量を通知するモニタ表示部41(通知手段)を備える。
【0052】
この結果、本実施形態によれば、作業プログラムのステップ毎に産業用ロボットの累積消費電力量が記憶されて通知されるため、作業者は作業プログラムのステップ毎の累積消費電力量を知ることができる。このため、作業プログラムのどのステップにおいて、累積消費電力量が大きいことが容易に分かるため、作業者はタクトタイムと消費電力のバランスを取りながら、作業プログラムの修正を行うことが可能となる。
【0053】
例えば、作業プログラムのステップにおいて、マニピュレータに急加速や急減速があるために、そのステップが他のステップよりも累積消費電力量が大きくなっていた場合、タクトタイムに大きく影響がでない範囲で当該ステップの急加速或いは急減速の程度を変更するように変更すると、累積消費電力量を抑制して節電することが可能となる。
【0054】
(2) 本実施形態のロボット制御装置10は、電力検出部23(電力検出手段)は、サーボモータMに対して電力供給が開始されてからサーボオンがなされるまでのサーボオフ時間t1(第1サーボオフ時間)、及び、サーボオンが解除されるサーボオフがなされてからサーボモータMに対する電力供給が遮断されるまでのサーボオフ時間t4(第2サーボオフ時間)における消費電力を検出し、記憶部15(記憶手段)は、第1サーボオフ時間および第2サーボオフ時間における累積消費電力を記憶する。
【0055】
この結果、本実施形態によれば、電源オンからサーボオンまでのサーボオフ時間t1、及びサーボオンが解除されるサーボオフから電源オフまでのサーボオフ時間t4においての累積消費電力量を作業者は把握できることから、これらの時間の累積消費電力量が大きい場合は、これらの時間を短縮することにより、累積消費電力量を抑制して節電することが可能となる。
【0056】
(3) 本実施形態のロボット制御装置10では、電力検出部23(電力検出手段)及び記憶部15(記憶手段)は、マニピュレータ30を制御するロボット制御装置に設けられ、モニタ表示部41(通知手段)は、ロボット制御装置10と通信が可能な(可搬式操作装置)に設けられた表示手段として構成されて、作業プログラムのステップ毎の累積消費電力量を表示(通知)する。
【0057】
この結果、本実施形態によれば、ティーチペンダントTPのモニタ表示部41に作業プログラムの各ステップの累積消費電力量が表示されることにより、上記(1)、(2)の効果を容易に実現することができる。
【0058】
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
・ 前記実施形態では、サーボオフ時間t1,サーボオフ時間t4,時間t2,t3の累積消費電力量を算出するようにしたが、これらの時間の累積消費電力量の算出する処理の全部又はいずれかの一部を省略してもよい。
【0059】
・ 前記実施形態では、通知手段として、モニタ表示部41としたが、モニタ表示部41の代わりに、或いは、モニタ表示部41の構成にさらに加えて、ロボット制御装置10に接続したプリンタを通知手段としてもよい、通知手段としてプリンタを使用することにより、グラフ化した、或いは表形式で記述した作業プログラムのステップ、或いは、時間帯と、累積消費電力量との関係を作業者に通知することが可能となる。
【0060】
・ 実施形態では、一台のマニピュレータ30と、ロボット制御装置とで説明したが、マニピュレータ30を複数台、共通のロボット制御装置に接続する場合では、マニピュレータ30毎に、電力検出部23を設けるとともに、各電力検出部23が検出した電流、電圧のデータを主制御部11にて集計し、作業プログラムの同一ステップ内において、マニピュレータ30毎の累積消費電力量を記憶部15にそれぞれ記憶して、モニタするようにしてもよい。また、マニピュレータ30以外のアクチュエータ(ポジショナ、スライダ、サーボトーチ、サーボガン等)もモニタするようにしても良いことは言うまでもない。
【0061】
・ 又、工場内の通信ネットワークを利用して、工場内に設置された各マニピュレータに関して、前述の実施形態のようにモニタすれば、温室効果ガスの排出取引に不可欠な節電量の継続的なモニタリングを無理なく行うこともできる。
【符号の説明】
【0062】
MC…電磁接触器、TP…ティーチペンダント(可搬式操作装置)、
10…ロボット制御装置、11…主制御部、12…システムコントロール部、
13…モーション制御部、14…消費電力演算部、15…記憶部(記憶手段)、
16…通信I/F、17…通信I/F、20…モータ制御部、
21…通信I/F、23…電力検出部(電力検出手段)、
25…電源部、30…マニピュレータ、41…モニタ表示部(通知手段)、
42…入力手段、43…通信I/F、50…モータ駆動回路、
51…3相交流電源、52…整流回路、
53…平滑コンデンサ、54…半導体スイッチング回路、
55…シャント抵抗、56…電流検出部、57…A/D変換器、
58a,58b,58c…電圧検出回路。
【特許請求の範囲】
【請求項1】
作業プログラムに従って動作する産業用ロボットの消費電力モニタ装置であって、
アクチュエータを駆動するサーボモータに供給される電力を検出する電力検出手段と、
前記作業プログラムのステップ毎に、前記電力検出手段が検出して累積した累積消費電力量を記憶する記憶手段と、
前記記憶手段が記憶した前記作業プログラムのステップ毎の累積消費電力量を通知する通知手段を備えることを特徴とする産業用ロボットの消費電力モニタ装置。
【請求項2】
前記電力検出手段は、さらに、前記サーボモータに対して電力供給が開始されてからサーボオンがなされるまでの第1サーボオフ時間、及び、サーボオンが解除されるサーボオフがなされてから前記サーボモータに対する電力供給が遮断されるまでの第2サーボオフ時間における消費電力を検出し、
前記記憶手段は、前記第1サーボオフ時間および前記第2サーボオフ時間における前記累積消費電力量を記憶することを特徴とする請求項1に記載の産業用ロボットの消費電力モニタ装置。
【請求項3】
前記電力検出手段及び記憶手段は、前記アクチュエータを制御するロボット制御装置に設けられ、前記通知手段は、前記ロボット制御装置と通信が可能な可搬式操作装置に設けられた表示手段であり、
該表示手段により前記作業プログラムのステップ毎の累積消費電力量を通知することを特徴とする請求項1又は請求項2に記載の産業用ロボットの消費電力モニタ装置。
【請求項1】
作業プログラムに従って動作する産業用ロボットの消費電力モニタ装置であって、
アクチュエータを駆動するサーボモータに供給される電力を検出する電力検出手段と、
前記作業プログラムのステップ毎に、前記電力検出手段が検出して累積した累積消費電力量を記憶する記憶手段と、
前記記憶手段が記憶した前記作業プログラムのステップ毎の累積消費電力量を通知する通知手段を備えることを特徴とする産業用ロボットの消費電力モニタ装置。
【請求項2】
前記電力検出手段は、さらに、前記サーボモータに対して電力供給が開始されてからサーボオンがなされるまでの第1サーボオフ時間、及び、サーボオンが解除されるサーボオフがなされてから前記サーボモータに対する電力供給が遮断されるまでの第2サーボオフ時間における消費電力を検出し、
前記記憶手段は、前記第1サーボオフ時間および前記第2サーボオフ時間における前記累積消費電力量を記憶することを特徴とする請求項1に記載の産業用ロボットの消費電力モニタ装置。
【請求項3】
前記電力検出手段及び記憶手段は、前記アクチュエータを制御するロボット制御装置に設けられ、前記通知手段は、前記ロボット制御装置と通信が可能な可搬式操作装置に設けられた表示手段であり、
該表示手段により前記作業プログラムのステップ毎の累積消費電力量を通知することを特徴とする請求項1又は請求項2に記載の産業用ロボットの消費電力モニタ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−63475(P2013−63475A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−202026(P2011−202026)
【出願日】平成23年9月15日(2011.9.15)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月15日(2011.9.15)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]