
産業用ロボット
【課題】産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1が、アーム2と、アームを支えることが可能な柱部材3と、柱部材の土台4とを備える産業用ロボットであって、アームは、柱部材に対して、アーム先端部22からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラ6を備えていることからなる。
【解決手段】産業用ロボット1が、アーム2と、アームを支えることが可能な柱部材3と、柱部材の土台4とを備える産業用ロボットであって、アームは、柱部材に対して、アーム先端部22からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラ6を備えていることからなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、産業用のロボットに関する。特には、溶接用及びレーザー加工用の産業用ロボットに関する。
【背景技術】
【0002】
各種の加工を行うための多軸の産業用ロボット(マニピュレータ)が知られている(例えば、特許文献1参照)。
これら産業用ロボットは、例えばアーク溶接・TIG溶接・レーザー加工など、アーム先端に各種作業用のツールが搭載され、ワーク(作業対象物)に対して所定の作業が行われる。これにより、従来の手作業に比べ、3次元の作業を安全で正確な作業を行うことが可能となった。
【0003】
そして、アームに搭載された作業ツールを使用して作業を行う場合、オペレータは、まずある程度作業ツールをワーク近辺に移動させ、ロボットマニピュレータに対して作業工程をティーチング(教示)しなければならない。
【0004】
しかしながら、このようなティーチング作業を行うためには、一般に「ティーチングボックス」と呼ばれる、複雑で多数のボタンを供えた装置やパネルを使いこなせなければならない(例えば、特許文献2、図1参照)。最近の産業用ロボットは構成や機能が複雑化しているため、オペレータは、ティーチングボックスを見ただけでは、使い方が全くわからず、また、説明書も非常に複雑で、相当程度の経験を積まないと使いこなすことが難しい。そのため、その産業用ロボットのメーカーにおいて、ティーチングボックスの使い方について数日間にわたりスクールリング(スクール受講)しなければならないというのが実情である。
【0005】
一方、近年は急激なグローバル化に伴い、特にアジア諸国との競争が激しくなり、今まで以上にコスト削減が求められている。しかしながら、複雑で高価な産業用ロボットを採用して、複雑なティーチングボックスを使わざるを得ない場合、結果的に人件費やスクール時間を大量に必要としてしまう。また作業できるのは日本語によるスクール受講を理解できる者だけに限られてしまい、この点からもコスト要求に見合わないことになる。さらに、凸凹面を有するワークや曲面を有するワークの溶接などは、複雑なティーチング作業を必要とし、慣れている者でも間違いを起こしやすく、欠陥の原因にもなってしまう。
具体的な例としては、そもそもワークを完全に絶対座標にあわせて配置することは大変難しいため、ユーザー座標系(相対座標系)での調整が重要になる。さらに、ワークが複雑な形状をしていたり凹凸が多い場合は、特にユーザー座標系(相対座標系)の設定が重要になってくる。しかしながら、このような設定や調整は、これまでのティーチングボックスで行うにはかなりの熟練と非常に高度な知識が必要となってしまうため、慣れている者でも間違いを起こしやすく、欠陥を生みやすい。
【0006】
また、大型の産業用ロボットを動作させる場合は、作業者の安全を確保するために、安全柵を用意する必要がある。しかしながら、安全柵の有無に関わらず、人がアームに触れてしまった場合などでも安全性を向上させる必要ある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−51996号公報
【特許文献2】特開平9−225873号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
そこで、本発明は、産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供することを目的とする。
さらに、上記の効果を有しつつ、安全性を向上させた産業用ロボットを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明の産業用ロボットは、アームと、アームを支える可能な柱部材と、柱部材の土台とを備える産業用ロボットであって、
アームは、柱部材に対して、アーム先端部からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、
柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、
ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラを備えていることからなる。
【0010】
すなわち、土台上を柱部材がスライド移動できることで水平方向(X,Y軸)の移動を確保し、アームが柱部材をスライド移動できることで上下(Z軸)の移動を確保できる。さらに、柱部材は鉛直線を軸として、手動でも回転可能であるため、360℃どの点においても位置づけが可能である。また、アーム先端と柱部材との距離も手動で調節できる。このような構成を採用することにより、多関節・多軸の複雑なロボットに比べ、製造が容易でコストも低く済むにもかかわらず、柱部材の高さおよびアーム長さが届くかぎり、3次元上のどの点も位置づけることが可能であり、その点を始点としてアーム先端を自動で移動させることができる。なお、本願にあって「手動で」とあっても自動(機械)制御も可能とすることを排除するものではなく、「自動で」とあっても手動制御も可能とすることを排除するものではない。
【0011】
そして、ティーチングボックスやパネルに変えて、家庭用の市販のゲームコントローラを使用するものである。現在、家庭用ゲーム機(例えばplaystation, X-box, wii)やパソコンのオンラインゲームは世界的に広く知れ渡り使用されているものであること、そしてそれらのコントローラは複雑な説明書などがなくても、子供や老人でも感覚的にゲームのキャラクター等を操作できるよう考慮されていることに着目して、当該ゲームコントローラを溶接・レーザー加工等における産業用ロボットに適用させるものである。そして、本発明においては、アーム先端の移動と、作業の教示及び開始・終了を行う必要があることから、少なくとも1つの十字キー又はレバーと複数のボタンを備えているものが、本発明に使用されるゲームコントローラとなる。特に、ゲームコントローラが、2つ以上の十字キー又はレバーと、4つ以上のボタンを有するものであることが、本発明に適している。この構成により、例えば、柱部材の水平移動とアームの上下移動を十字キー又はレバーで行い、作業の始点・中間点・終点・作業開始/終了をボタン操作で行わせることができる。さらに、ボタン長押しなども利用して、長押し中のレバー操作は移動速度が早くなるなど、速度調整をできる構成としても良い。これら指示内容とボタン等の対応は、家庭用ゲームやオンラインゲームで現在行われているように、オペレータが自由に変更できる構成としても良い。
【0012】
ゲームコントローラの使用の具体的な一例としては、例えば2つの十字レバーと、4つのボタンを有するゲームコントローラである場合、柱部材の水平移動を1つのレバーで行い、もう1つのレバーの上下でアームの上下移動を行う。3つのボタンで、作業の始点・中間点・終点を指定でき、残りの1つのボタンで作業開始・終了を指示する。
【0013】
その他、ゲームコントローラのキーやボタンの数などに応じて、操作指令を適宜増やすことができる。また、ゲームコントローラと産業用ロボットの関連づけは、一般に市販されているPCを使い、周知のプログラム手段(visual basicなど)を通じて行うことができるので、特別に高度な制御装置も必要としない。
【0014】
土台は、本発明の目的を達成し、柱部材が水平移動できるものであれば、その構造は特定のものに限定されないが、土台が、柱部材を横軸(X軸)に移動させるための第1のレールと、縦軸(Y軸)に移動させるための第2のレールとを備え、両レールの上に柱状部材を保持するための柱支持部が備えられており、柱支持部が両レール上をスライドすることで、水平方向に自動で移動可能であることが好適である。X,Y軸となる2つのレール上を柱支持部が移動する構成とすることで、十字キー又はレバー操作との相性が良いものとなる。即ち、十字キー又はレバーの操作を、両レールのスライド移動と対応させれば、最も一般的なゲーム操作の感覚と近くなるからである。
【0015】
具体的なレール構成の一例としては、第1のレールは、2本の平行するレールからなる。第2のレールは、第1のレールの上に乗せられたプレート上に設けられ、2本の平行するレールからなる。プレートが第1のレール上をスライドできるように設けられることで、プレートは横軸(X軸)移動が可能である。そして、第2のレール上に設けられたプレート上に柱支持部が設けられ、柱支持部は第2のレール上を縦軸(Y軸)移動が可能である。なお、このスライドガイドの構成として、直交型のLMガイドを使用することができる。
【0016】
この構成により、柱支持部は自由に水平移動(縦・横・斜め移動)が可能となる。プレート及び柱支持部のレール上の移動は、モータなど公知の手段によって制御される。
【0017】
柱支持部は、例えばその上に柱部材を被せるような構成とすることができる。柱部材は、ボールベアリングなどを利用して鉛直線を軸にして回転可能なように支持される。
【0018】
柱部材は、アームを支持するためのアーム支持部を有し、アーム支持部は、アームとはスライドガイド(LMガイド)によって連結されることで、アーム先端部からの長さを水平方向に手動で調節可能である。また、柱部材は回転可能なので、アームもそれに伴い回転される。アーム先端には、作業ツールを搭載するためのコネクタを有している。
【0019】
アームの長さの調整につき他の構成としては、コスト等の要求に見合えば、例えばテレスコピックパイプなどの伸縮構造として備えることも可能であるが、棒状の部材として上記の構成とすることで、製造や取り扱いが容易である。本発明においては、作業ツールが、溶接ヘッド又はレーザー加工ヘッドであることで、前述したこれまでの産業用ロボットや、ティーチング・操作の問題点を全て解決可能であり、本願の発明の効果を最も発揮できるものである。さらに、本発明は、作業ツールとして、例えば塗装ツールなど、用途に応じて様々なものを適用することができるので、利便性が高い。
【0020】
また、アームと柱部材とのロック機構、及び/又は柱部材と土台とのロック機構その他、必要なロック機構が、電磁石錠によるものであることが好適である。本発明においては、手動や自動で行う位置決めに関して、位置固定のためのロック機構が適宜設けられる。ロック機構としては、ボルトその他の機械式など、各種公知のロック機構を使用できるが、電磁石錠が最も好適である。電磁石錠は、鉄心にコイルを巻きつけて構成され、電流を流すと一時的に磁石になり、この磁力を鍵として応用した電気錠である。そのため、瞬時にロックが可能であり、スイッチを操作しやすい場所に置くことができるだけでなく、ゲームコントローラとの対応をさせることも容易である。本発明においては、通常はロックされた状態とし、ゲームコントローラによる支持があったとき又はスイッチによる操作があった時にロック解除する構成とすると好適である。また電磁石錠は面同士で吸着する構造なので、スペースを殆ど選ばず、各部材が接触する任意の場所に取付けることができる。さらに、吸着力を電気量で調節できるため、万一アームに人がぶつかった時に、アーム側が負ける程度の吸着力にしておけば、人へのダメージを軽減することができ、安全性を向上させることができる。
【0021】
以上の通り、本発明は、多軸の複雑なロボットの構成に比べれば簡易な構成であるにもかかわらず、アーム先端の水平方向・上下方向の移動を全て確保し、3次元上のどの点も始点とすることができる構成を保持し、アームの上下(Z軸)スライド動作、土台に対する柱部材の水平(X,Y軸)スライド動作、作業始点・中間点・終点、及び作業動作の速度といったティーチング・操作を全てゲームコントローラによって行うことができるものである。したがって、一般的なテレビゲームによってキャラクターを動かすのと同じ感覚で、作業ツールの位置づけ及び移動などを制御できるものである。
すなわち、前述のように、ワークを完全に絶対座標にあわせて配置することは大変難しく、ユーザー座標系(相対座標系)の調整が必要であり、またワークが複雑な形状をしていたり凹凸が多い場合は、特にユーザー座標系(相対座標系)の調整・設定が重要になるが、本発明によれば、ユーザー座標系(相対座標系)の設定がゲーム感覚で簡単に可能になるため、必要な調整をより容易に行うことが出来る。この点について、制御装置にモニター画面を設け、作業ツール先端位置と各種座標の関係や溶接状況、ゲームコントローラの使い方の説明等の表示を行ったり、作業ツールに設けたカメラによる映像表示をしたりすることで、よりゲームに近い感覚で操作・ティーチングを行えるようにすることが出来る。
【0022】
さらに、電磁石錠を使用することにより、ロックの強さ(吸着力)を調節できるため、例えば作業者がアームにぶつかった時、ある程度の力が加われば動く(ずれる)程度のロックの強さに設定することで、怪我の可能性を削減し、安全柵が設置されない場合でも安全性を向上することができる。
【発明の効果】
【0023】
本発明の以上の構成により、比較的簡易なロボット構成として、製造コストを削減できるにもかかわらず、3次元上で作業ツールの移動が自在に制御できる。さらに、柱部材の回転及びアーム長さの調整などは手動でも扱うことが可能で、複雑な制御を必要としない。したがって、制御装置としても、特別に高度な装置を必要としないので、利便性が高い。
【0024】
そして、このような構成・効果を有するにも関わらず、必要なティーチング・操作は全て市販のゲームコントローラによって、通常の家庭用ゲーム操作と同じように直感的に行うことができるので、長時間のスクール受講などは必要なく、極めて短時間に操作を教えることができる。また、例え日本語に不慣れな者にとっても、簡単に操作などを覚えたり、自分からも教えたりすることができる。
【0025】
さらに、装置が小型で安全柵の設置が義務づけられない場合であっても、怪我の可能性を減じて、安全性を向上させることができる。
【図面の簡単な説明】
【0026】
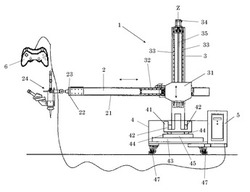
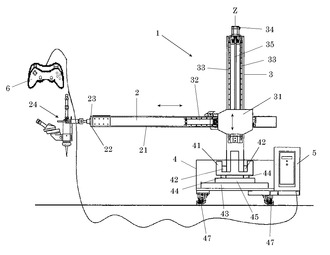
【図1】本発明の産業用ロボットを示す概略図である。
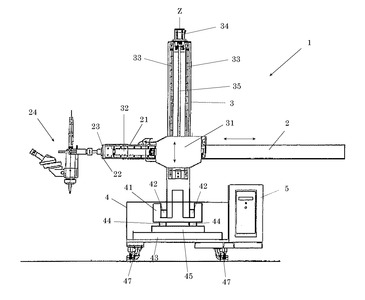
【図2】アームをスライドさせて柱部材とアーム先端を短くした状態を示す概略図である。
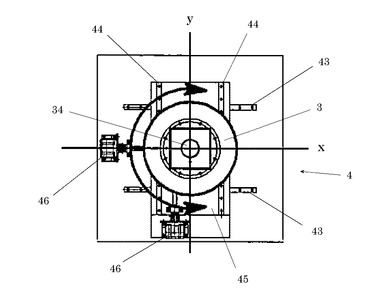
【図3】土台構造を示す概略図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施するための形態を、図面を用いて説明する。
図1は、本発明の産業用ロボットを示す概略図であり、図2は、アームをスライドさせて柱部材とアーム先端を短くした状態を示す概略図(ゲームコントローラは図1と同様であり省略されている)であり、図3は土台構造を示す概略図である。
【0028】
産業用ロボット1は、アーム2と、アーム2を支える可能な柱部材3と、柱部材の土台4とを備える。本実施例では、制御装置5は土台4に連結されているが、これに限られるものではない。ゲームコントローラ6は、制御装置5に接続されている。
【0029】
土台4には、柱部材3を支持すべく柱支持部41が設けられる。柱支持部41は、管状部材からなっており、上から柱部材3を被せるような構成を採用することができる。柱部材3は、ボールベアリング42によって、柱支持部41に対して、鉛直線を軸として回転可能となっている。さらに、柱部材3は、柱支持部41に適宜配置された電磁石錠(図示せず)により、任意の位置でロックすることができる。
【0030】
柱支持部41を移動可能にすべく、第1のレール43が設けられている。第1のレール43は、2本の平行するレールからなる。第2のレール44は、第1のレール43の上に乗せられたプレート45の上に設けられ、2本の平行するレールからなる。プレート45が第1のレール43の上をスライドできるように設けられることで、プレート45は横軸(X軸)移動が可能である。
そして、プレート45の上に設けられた第2のレール44の上に柱支持部41が設けられ、柱支持部41は第2のレール44上を縦軸(Y軸)移動が可能である。この構成により、柱支持部41は水平移動(縦・横・斜め移動)が自由に可能となる。プレート45及び柱支持部41の両レール上の移動は、モータ46など公知の手段によって制御され、また適宜配置された電磁石錠によりロック可能である。なお、土台4自体を動かすことが可能なように、下部にローラ47を備えている。
【0031】
柱部材3は、アーム2を支持するためのアーム支持部31を有し、アーム支持部31とアーム2は、アーム2の長さを水平方向に手動で調節可能なように、スライドガイド32によって連結されている。また、アーム支持部31を上下(Z軸)に自動でスライドさせるための第3のレール33を有している。柱部材3は、本実施例ではその頭頂部にモータ34が設けられ、当該モータ34及びボールネジ機構35を使用することで、アーム支持部31は、第3のレール33上を上下(Z軸)に動くことができ、適宜配置された電磁石錠で保持される。
【0032】
アーム2は、柱部材3の柱支持部31に設けられており、レール受け21を有しており、スライドガイド32(LMガイド)と組み合わさり、アーム2の長さを水平方向に手動で調節可能であり、適宜配置された電磁石錠で保持される。アーム先端22には、作業ツールを搭載するためのコネクタ23を有しており、コネクタ23を介して作業ツールである溶接ヘッド24が搭載されている。
【0033】
ゲームコントローラ6は、制御装置5を介して、産業用ロボットにティーチング・操作を実行させることができる。さらに、溶接ヘッド24も、従来の産業用ロボットと同様に、制御装置5を介して制御可能となっている。制御装置5にはモニター画面を設け、各種設定や溶接状況、ゲームコントローラの使い方等の説明の表示や設定変更できるようにすることは従来と同様に可能である。
そして、本実施例では、市販されている、USBインターフェース接続が可能なもので、十字キーが1つ、レバーが2つ、12ボタンを有するものを使用した。対応関係としては、1つのレバーで柱部材3の水平移動を、もう1つのレバーの上下でアーム2の上下移動を操作し、各ボタンによって、溶接始点・中間点・終点の指定、移動速度の加速・減速、溶接開始・終了の指示を行うことができる。
【0034】
本発明においては、作業の始点・終点と、複数にわたる中間点を3次元状で感覚的に自由に設定できるため、3次元上で曲線的な動きをユーザー座標系でも自由にティーチングすることが簡単にできる。したがって、これまで非常に複雑で困難であった凸凹を有するワークや曲線の溶接・レーザー切断についても、極めて簡単にティーチングを行うことができる。
【0035】
なお、製造コストや必要性に応じて、例えば溶接ヘッド24をアームの長手方向の軸に対して回転可能にするなど、より溶接ヘッドに対して複雑な動作をさせることも可能である。即ち、本発明の土台・柱部材・アーム及びゲームコントローラの基本構成を維持することで、例え様々な複雑な機能を追加しても、容易なティーチング・操作を保証することができる。また、本発明の産業用ロボットはその大きさを問わない構成なので、様々な用途に対応が可能である。
【0036】
(実験例)
上述の実施例に基づく試作機(作業ツールは溶接ヘッド)について、日本語がわからない者に、英語が堪能でない者が使い方を英語で数十分に渡り教えたところ、溶接ヘッドを望んだとおりに動かすことができた。このような効果はこれまでの産業ロボットにおいて、特に溶接やレーザー加工の分野においては出来なかったことであり、作業の効率化を大きく向上させることが出来る。
【符号の説明】
【0037】
1 産業用ロボット
2 アーム
3 柱部材
4 土台
5 制御装置
6 ゲームコントローラ
21 レール受け
22 アーム先端
23 コネクタ
24 溶接ヘッド
31 アーム支持部
32 スライドガイド
33 第3のレール
34 モータ
35 ボールネジ機構
41 柱支持部
42 ボールベアリング
43 第1のレール
44 第2のレール
45 プレート
46 モータ
47 ローラ
【技術分野】
【0001】
本発明は、産業用のロボットに関する。特には、溶接用及びレーザー加工用の産業用ロボットに関する。
【背景技術】
【0002】
各種の加工を行うための多軸の産業用ロボット(マニピュレータ)が知られている(例えば、特許文献1参照)。
これら産業用ロボットは、例えばアーク溶接・TIG溶接・レーザー加工など、アーム先端に各種作業用のツールが搭載され、ワーク(作業対象物)に対して所定の作業が行われる。これにより、従来の手作業に比べ、3次元の作業を安全で正確な作業を行うことが可能となった。
【0003】
そして、アームに搭載された作業ツールを使用して作業を行う場合、オペレータは、まずある程度作業ツールをワーク近辺に移動させ、ロボットマニピュレータに対して作業工程をティーチング(教示)しなければならない。
【0004】
しかしながら、このようなティーチング作業を行うためには、一般に「ティーチングボックス」と呼ばれる、複雑で多数のボタンを供えた装置やパネルを使いこなせなければならない(例えば、特許文献2、図1参照)。最近の産業用ロボットは構成や機能が複雑化しているため、オペレータは、ティーチングボックスを見ただけでは、使い方が全くわからず、また、説明書も非常に複雑で、相当程度の経験を積まないと使いこなすことが難しい。そのため、その産業用ロボットのメーカーにおいて、ティーチングボックスの使い方について数日間にわたりスクールリング(スクール受講)しなければならないというのが実情である。
【0005】
一方、近年は急激なグローバル化に伴い、特にアジア諸国との競争が激しくなり、今まで以上にコスト削減が求められている。しかしながら、複雑で高価な産業用ロボットを採用して、複雑なティーチングボックスを使わざるを得ない場合、結果的に人件費やスクール時間を大量に必要としてしまう。また作業できるのは日本語によるスクール受講を理解できる者だけに限られてしまい、この点からもコスト要求に見合わないことになる。さらに、凸凹面を有するワークや曲面を有するワークの溶接などは、複雑なティーチング作業を必要とし、慣れている者でも間違いを起こしやすく、欠陥の原因にもなってしまう。
具体的な例としては、そもそもワークを完全に絶対座標にあわせて配置することは大変難しいため、ユーザー座標系(相対座標系)での調整が重要になる。さらに、ワークが複雑な形状をしていたり凹凸が多い場合は、特にユーザー座標系(相対座標系)の設定が重要になってくる。しかしながら、このような設定や調整は、これまでのティーチングボックスで行うにはかなりの熟練と非常に高度な知識が必要となってしまうため、慣れている者でも間違いを起こしやすく、欠陥を生みやすい。
【0006】
また、大型の産業用ロボットを動作させる場合は、作業者の安全を確保するために、安全柵を用意する必要がある。しかしながら、安全柵の有無に関わらず、人がアームに触れてしまった場合などでも安全性を向上させる必要ある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−51996号公報
【特許文献2】特開平9−225873号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
そこで、本発明は、産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供することを目的とする。
さらに、上記の効果を有しつつ、安全性を向上させた産業用ロボットを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明の産業用ロボットは、アームと、アームを支える可能な柱部材と、柱部材の土台とを備える産業用ロボットであって、
アームは、柱部材に対して、アーム先端部からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、
柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、
ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラを備えていることからなる。
【0010】
すなわち、土台上を柱部材がスライド移動できることで水平方向(X,Y軸)の移動を確保し、アームが柱部材をスライド移動できることで上下(Z軸)の移動を確保できる。さらに、柱部材は鉛直線を軸として、手動でも回転可能であるため、360℃どの点においても位置づけが可能である。また、アーム先端と柱部材との距離も手動で調節できる。このような構成を採用することにより、多関節・多軸の複雑なロボットに比べ、製造が容易でコストも低く済むにもかかわらず、柱部材の高さおよびアーム長さが届くかぎり、3次元上のどの点も位置づけることが可能であり、その点を始点としてアーム先端を自動で移動させることができる。なお、本願にあって「手動で」とあっても自動(機械)制御も可能とすることを排除するものではなく、「自動で」とあっても手動制御も可能とすることを排除するものではない。
【0011】
そして、ティーチングボックスやパネルに変えて、家庭用の市販のゲームコントローラを使用するものである。現在、家庭用ゲーム機(例えばplaystation, X-box, wii)やパソコンのオンラインゲームは世界的に広く知れ渡り使用されているものであること、そしてそれらのコントローラは複雑な説明書などがなくても、子供や老人でも感覚的にゲームのキャラクター等を操作できるよう考慮されていることに着目して、当該ゲームコントローラを溶接・レーザー加工等における産業用ロボットに適用させるものである。そして、本発明においては、アーム先端の移動と、作業の教示及び開始・終了を行う必要があることから、少なくとも1つの十字キー又はレバーと複数のボタンを備えているものが、本発明に使用されるゲームコントローラとなる。特に、ゲームコントローラが、2つ以上の十字キー又はレバーと、4つ以上のボタンを有するものであることが、本発明に適している。この構成により、例えば、柱部材の水平移動とアームの上下移動を十字キー又はレバーで行い、作業の始点・中間点・終点・作業開始/終了をボタン操作で行わせることができる。さらに、ボタン長押しなども利用して、長押し中のレバー操作は移動速度が早くなるなど、速度調整をできる構成としても良い。これら指示内容とボタン等の対応は、家庭用ゲームやオンラインゲームで現在行われているように、オペレータが自由に変更できる構成としても良い。
【0012】
ゲームコントローラの使用の具体的な一例としては、例えば2つの十字レバーと、4つのボタンを有するゲームコントローラである場合、柱部材の水平移動を1つのレバーで行い、もう1つのレバーの上下でアームの上下移動を行う。3つのボタンで、作業の始点・中間点・終点を指定でき、残りの1つのボタンで作業開始・終了を指示する。
【0013】
その他、ゲームコントローラのキーやボタンの数などに応じて、操作指令を適宜増やすことができる。また、ゲームコントローラと産業用ロボットの関連づけは、一般に市販されているPCを使い、周知のプログラム手段(visual basicなど)を通じて行うことができるので、特別に高度な制御装置も必要としない。
【0014】
土台は、本発明の目的を達成し、柱部材が水平移動できるものであれば、その構造は特定のものに限定されないが、土台が、柱部材を横軸(X軸)に移動させるための第1のレールと、縦軸(Y軸)に移動させるための第2のレールとを備え、両レールの上に柱状部材を保持するための柱支持部が備えられており、柱支持部が両レール上をスライドすることで、水平方向に自動で移動可能であることが好適である。X,Y軸となる2つのレール上を柱支持部が移動する構成とすることで、十字キー又はレバー操作との相性が良いものとなる。即ち、十字キー又はレバーの操作を、両レールのスライド移動と対応させれば、最も一般的なゲーム操作の感覚と近くなるからである。
【0015】
具体的なレール構成の一例としては、第1のレールは、2本の平行するレールからなる。第2のレールは、第1のレールの上に乗せられたプレート上に設けられ、2本の平行するレールからなる。プレートが第1のレール上をスライドできるように設けられることで、プレートは横軸(X軸)移動が可能である。そして、第2のレール上に設けられたプレート上に柱支持部が設けられ、柱支持部は第2のレール上を縦軸(Y軸)移動が可能である。なお、このスライドガイドの構成として、直交型のLMガイドを使用することができる。
【0016】
この構成により、柱支持部は自由に水平移動(縦・横・斜め移動)が可能となる。プレート及び柱支持部のレール上の移動は、モータなど公知の手段によって制御される。
【0017】
柱支持部は、例えばその上に柱部材を被せるような構成とすることができる。柱部材は、ボールベアリングなどを利用して鉛直線を軸にして回転可能なように支持される。
【0018】
柱部材は、アームを支持するためのアーム支持部を有し、アーム支持部は、アームとはスライドガイド(LMガイド)によって連結されることで、アーム先端部からの長さを水平方向に手動で調節可能である。また、柱部材は回転可能なので、アームもそれに伴い回転される。アーム先端には、作業ツールを搭載するためのコネクタを有している。
【0019】
アームの長さの調整につき他の構成としては、コスト等の要求に見合えば、例えばテレスコピックパイプなどの伸縮構造として備えることも可能であるが、棒状の部材として上記の構成とすることで、製造や取り扱いが容易である。本発明においては、作業ツールが、溶接ヘッド又はレーザー加工ヘッドであることで、前述したこれまでの産業用ロボットや、ティーチング・操作の問題点を全て解決可能であり、本願の発明の効果を最も発揮できるものである。さらに、本発明は、作業ツールとして、例えば塗装ツールなど、用途に応じて様々なものを適用することができるので、利便性が高い。
【0020】
また、アームと柱部材とのロック機構、及び/又は柱部材と土台とのロック機構その他、必要なロック機構が、電磁石錠によるものであることが好適である。本発明においては、手動や自動で行う位置決めに関して、位置固定のためのロック機構が適宜設けられる。ロック機構としては、ボルトその他の機械式など、各種公知のロック機構を使用できるが、電磁石錠が最も好適である。電磁石錠は、鉄心にコイルを巻きつけて構成され、電流を流すと一時的に磁石になり、この磁力を鍵として応用した電気錠である。そのため、瞬時にロックが可能であり、スイッチを操作しやすい場所に置くことができるだけでなく、ゲームコントローラとの対応をさせることも容易である。本発明においては、通常はロックされた状態とし、ゲームコントローラによる支持があったとき又はスイッチによる操作があった時にロック解除する構成とすると好適である。また電磁石錠は面同士で吸着する構造なので、スペースを殆ど選ばず、各部材が接触する任意の場所に取付けることができる。さらに、吸着力を電気量で調節できるため、万一アームに人がぶつかった時に、アーム側が負ける程度の吸着力にしておけば、人へのダメージを軽減することができ、安全性を向上させることができる。
【0021】
以上の通り、本発明は、多軸の複雑なロボットの構成に比べれば簡易な構成であるにもかかわらず、アーム先端の水平方向・上下方向の移動を全て確保し、3次元上のどの点も始点とすることができる構成を保持し、アームの上下(Z軸)スライド動作、土台に対する柱部材の水平(X,Y軸)スライド動作、作業始点・中間点・終点、及び作業動作の速度といったティーチング・操作を全てゲームコントローラによって行うことができるものである。したがって、一般的なテレビゲームによってキャラクターを動かすのと同じ感覚で、作業ツールの位置づけ及び移動などを制御できるものである。
すなわち、前述のように、ワークを完全に絶対座標にあわせて配置することは大変難しく、ユーザー座標系(相対座標系)の調整が必要であり、またワークが複雑な形状をしていたり凹凸が多い場合は、特にユーザー座標系(相対座標系)の調整・設定が重要になるが、本発明によれば、ユーザー座標系(相対座標系)の設定がゲーム感覚で簡単に可能になるため、必要な調整をより容易に行うことが出来る。この点について、制御装置にモニター画面を設け、作業ツール先端位置と各種座標の関係や溶接状況、ゲームコントローラの使い方の説明等の表示を行ったり、作業ツールに設けたカメラによる映像表示をしたりすることで、よりゲームに近い感覚で操作・ティーチングを行えるようにすることが出来る。
【0022】
さらに、電磁石錠を使用することにより、ロックの強さ(吸着力)を調節できるため、例えば作業者がアームにぶつかった時、ある程度の力が加われば動く(ずれる)程度のロックの強さに設定することで、怪我の可能性を削減し、安全柵が設置されない場合でも安全性を向上することができる。
【発明の効果】
【0023】
本発明の以上の構成により、比較的簡易なロボット構成として、製造コストを削減できるにもかかわらず、3次元上で作業ツールの移動が自在に制御できる。さらに、柱部材の回転及びアーム長さの調整などは手動でも扱うことが可能で、複雑な制御を必要としない。したがって、制御装置としても、特別に高度な装置を必要としないので、利便性が高い。
【0024】
そして、このような構成・効果を有するにも関わらず、必要なティーチング・操作は全て市販のゲームコントローラによって、通常の家庭用ゲーム操作と同じように直感的に行うことができるので、長時間のスクール受講などは必要なく、極めて短時間に操作を教えることができる。また、例え日本語に不慣れな者にとっても、簡単に操作などを覚えたり、自分からも教えたりすることができる。
【0025】
さらに、装置が小型で安全柵の設置が義務づけられない場合であっても、怪我の可能性を減じて、安全性を向上させることができる。
【図面の簡単な説明】
【0026】
【図1】本発明の産業用ロボットを示す概略図である。
【図2】アームをスライドさせて柱部材とアーム先端を短くした状態を示す概略図である。
【図3】土台構造を示す概略図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施するための形態を、図面を用いて説明する。
図1は、本発明の産業用ロボットを示す概略図であり、図2は、アームをスライドさせて柱部材とアーム先端を短くした状態を示す概略図(ゲームコントローラは図1と同様であり省略されている)であり、図3は土台構造を示す概略図である。
【0028】
産業用ロボット1は、アーム2と、アーム2を支える可能な柱部材3と、柱部材の土台4とを備える。本実施例では、制御装置5は土台4に連結されているが、これに限られるものではない。ゲームコントローラ6は、制御装置5に接続されている。
【0029】
土台4には、柱部材3を支持すべく柱支持部41が設けられる。柱支持部41は、管状部材からなっており、上から柱部材3を被せるような構成を採用することができる。柱部材3は、ボールベアリング42によって、柱支持部41に対して、鉛直線を軸として回転可能となっている。さらに、柱部材3は、柱支持部41に適宜配置された電磁石錠(図示せず)により、任意の位置でロックすることができる。
【0030】
柱支持部41を移動可能にすべく、第1のレール43が設けられている。第1のレール43は、2本の平行するレールからなる。第2のレール44は、第1のレール43の上に乗せられたプレート45の上に設けられ、2本の平行するレールからなる。プレート45が第1のレール43の上をスライドできるように設けられることで、プレート45は横軸(X軸)移動が可能である。
そして、プレート45の上に設けられた第2のレール44の上に柱支持部41が設けられ、柱支持部41は第2のレール44上を縦軸(Y軸)移動が可能である。この構成により、柱支持部41は水平移動(縦・横・斜め移動)が自由に可能となる。プレート45及び柱支持部41の両レール上の移動は、モータ46など公知の手段によって制御され、また適宜配置された電磁石錠によりロック可能である。なお、土台4自体を動かすことが可能なように、下部にローラ47を備えている。
【0031】
柱部材3は、アーム2を支持するためのアーム支持部31を有し、アーム支持部31とアーム2は、アーム2の長さを水平方向に手動で調節可能なように、スライドガイド32によって連結されている。また、アーム支持部31を上下(Z軸)に自動でスライドさせるための第3のレール33を有している。柱部材3は、本実施例ではその頭頂部にモータ34が設けられ、当該モータ34及びボールネジ機構35を使用することで、アーム支持部31は、第3のレール33上を上下(Z軸)に動くことができ、適宜配置された電磁石錠で保持される。
【0032】
アーム2は、柱部材3の柱支持部31に設けられており、レール受け21を有しており、スライドガイド32(LMガイド)と組み合わさり、アーム2の長さを水平方向に手動で調節可能であり、適宜配置された電磁石錠で保持される。アーム先端22には、作業ツールを搭載するためのコネクタ23を有しており、コネクタ23を介して作業ツールである溶接ヘッド24が搭載されている。
【0033】
ゲームコントローラ6は、制御装置5を介して、産業用ロボットにティーチング・操作を実行させることができる。さらに、溶接ヘッド24も、従来の産業用ロボットと同様に、制御装置5を介して制御可能となっている。制御装置5にはモニター画面を設け、各種設定や溶接状況、ゲームコントローラの使い方等の説明の表示や設定変更できるようにすることは従来と同様に可能である。
そして、本実施例では、市販されている、USBインターフェース接続が可能なもので、十字キーが1つ、レバーが2つ、12ボタンを有するものを使用した。対応関係としては、1つのレバーで柱部材3の水平移動を、もう1つのレバーの上下でアーム2の上下移動を操作し、各ボタンによって、溶接始点・中間点・終点の指定、移動速度の加速・減速、溶接開始・終了の指示を行うことができる。
【0034】
本発明においては、作業の始点・終点と、複数にわたる中間点を3次元状で感覚的に自由に設定できるため、3次元上で曲線的な動きをユーザー座標系でも自由にティーチングすることが簡単にできる。したがって、これまで非常に複雑で困難であった凸凹を有するワークや曲線の溶接・レーザー切断についても、極めて簡単にティーチングを行うことができる。
【0035】
なお、製造コストや必要性に応じて、例えば溶接ヘッド24をアームの長手方向の軸に対して回転可能にするなど、より溶接ヘッドに対して複雑な動作をさせることも可能である。即ち、本発明の土台・柱部材・アーム及びゲームコントローラの基本構成を維持することで、例え様々な複雑な機能を追加しても、容易なティーチング・操作を保証することができる。また、本発明の産業用ロボットはその大きさを問わない構成なので、様々な用途に対応が可能である。
【0036】
(実験例)
上述の実施例に基づく試作機(作業ツールは溶接ヘッド)について、日本語がわからない者に、英語が堪能でない者が使い方を英語で数十分に渡り教えたところ、溶接ヘッドを望んだとおりに動かすことができた。このような効果はこれまでの産業ロボットにおいて、特に溶接やレーザー加工の分野においては出来なかったことであり、作業の効率化を大きく向上させることが出来る。
【符号の説明】
【0037】
1 産業用ロボット
2 アーム
3 柱部材
4 土台
5 制御装置
6 ゲームコントローラ
21 レール受け
22 アーム先端
23 コネクタ
24 溶接ヘッド
31 アーム支持部
32 スライドガイド
33 第3のレール
34 モータ
35 ボールネジ機構
41 柱支持部
42 ボールベアリング
43 第1のレール
44 第2のレール
45 プレート
46 モータ
47 ローラ
【特許請求の範囲】
【請求項1】
アームと、アームを支えることが可能な柱部材と、柱部材の土台とを備える産業用ロボットであって、
アームは、柱部材に対して、アーム先端部からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、
柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、
ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラを備えていることを特徴とする産業用ロボット。
【請求項2】
作業ツールがアーム先端に搭載されていることを特徴とする請求項1に記載の産業用ロボット。
【請求項3】
作業ツールが溶接ヘッド又はレーザー加工ヘッドであることを特徴とする請求項2に記載の産業用ロボット。
【請求項4】
土台が、柱部材を横軸(X軸)に移動させるための第1のレールと、縦軸(Y軸)に移動させるための第2のレールとを備え、両レールの上に柱状部材を保持するための柱支持部が備えられており、
柱支持部が両レール上をスライドすることで、水平方向に自動で移動可能であることを特徴とする請求項1乃至3に記載の産業用ロボット。
【請求項5】
柱部材は、アームを支持するためのアーム支持部を有し、
アーム支持部は、アームとスライドガイドによって連結されることで、
アーム先端部からの長さを水平方向に手動で調節可能であることを特徴とする請求項1乃至4に記載の産業用ロボット。
【請求項6】
ゲームコントローラが、2つ以上の十字キー又はレバーと、4つ以上のボタンを有することを特徴とする請求項1乃至5に記載の産業用ロボット。
【請求項7】
ゲームコントローラが、柱部材に対するアームの上下(Z軸)スライド動作、土台に対する柱部材の水平(X,Y軸)スライド動作、作業始点・中間点・終点、作業開始・終了、及び作業動作の速度を教示及び操作できることを特徴とする請求項1乃至6に記載の産業用ロボット。
【請求項8】
アームと柱部材とのロック機構、及び/又は柱部材と土台とのロック機構が、電磁石錠によるものであることを特徴とする請求項1乃至7に記載の産業用ロボット。
【請求項1】
アームと、アームを支えることが可能な柱部材と、柱部材の土台とを備える産業用ロボットであって、
アームは、柱部材に対して、アーム先端部からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、
柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、
ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラを備えていることを特徴とする産業用ロボット。
【請求項2】
作業ツールがアーム先端に搭載されていることを特徴とする請求項1に記載の産業用ロボット。
【請求項3】
作業ツールが溶接ヘッド又はレーザー加工ヘッドであることを特徴とする請求項2に記載の産業用ロボット。
【請求項4】
土台が、柱部材を横軸(X軸)に移動させるための第1のレールと、縦軸(Y軸)に移動させるための第2のレールとを備え、両レールの上に柱状部材を保持するための柱支持部が備えられており、
柱支持部が両レール上をスライドすることで、水平方向に自動で移動可能であることを特徴とする請求項1乃至3に記載の産業用ロボット。
【請求項5】
柱部材は、アームを支持するためのアーム支持部を有し、
アーム支持部は、アームとスライドガイドによって連結されることで、
アーム先端部からの長さを水平方向に手動で調節可能であることを特徴とする請求項1乃至4に記載の産業用ロボット。
【請求項6】
ゲームコントローラが、2つ以上の十字キー又はレバーと、4つ以上のボタンを有することを特徴とする請求項1乃至5に記載の産業用ロボット。
【請求項7】
ゲームコントローラが、柱部材に対するアームの上下(Z軸)スライド動作、土台に対する柱部材の水平(X,Y軸)スライド動作、作業始点・中間点・終点、作業開始・終了、及び作業動作の速度を教示及び操作できることを特徴とする請求項1乃至6に記載の産業用ロボット。
【請求項8】
アームと柱部材とのロック機構、及び/又は柱部材と土台とのロック機構が、電磁石錠によるものであることを特徴とする請求項1乃至7に記載の産業用ロボット。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−139746(P2012−139746A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−292507(P2010−292507)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(591146697)愛知産業株式会社 (19)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(591146697)愛知産業株式会社 (19)
【Fターム(参考)】
[ Back to top ]