
用手呼吸装置である蘇生装置
【課題】容態、身体/肺の大きさ、年齢、及び性別などの個人的な要因に関わらず、いかなる患者において使用することもできる、単一の手動用手呼吸又は蘇生装置を開発する。
【解決手段】投入及び排出機構120,130を有する封止体積を取り囲む剛性パネル140A,140B,140D,140E,140F,140G,140Hを有する本体110を備え、当該剛性パネルを互いに対して動かすことができ、本体110が、非圧縮状態及び圧縮状態を有し、本体110が、手の移動の方向、及び手の移動とは別の少なくとも1つの別の方向の移動を有し、少なくとも1つの別方向の移動は、移動及び上記パネルの寸法及び相対角度の関数であり、少なくとも2つの上記パネルが、互いに略直交する軸線の周りで回転可能である、用手呼吸装置である蘇生装置100。
【解決手段】投入及び排出機構120,130を有する封止体積を取り囲む剛性パネル140A,140B,140D,140E,140F,140G,140Hを有する本体110を備え、当該剛性パネルを互いに対して動かすことができ、本体110が、非圧縮状態及び圧縮状態を有し、本体110が、手の移動の方向、及び手の移動とは別の少なくとも1つの別の方向の移動を有し、少なくとも1つの別方向の移動は、移動及び上記パネルの寸法及び相対角度の関数であり、少なくとも2つの上記パネルが、互いに略直交する軸線の周りで回転可能である、用手呼吸装置である蘇生装置100。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、手動の用手呼吸である蘇生装置(MANUAL VENTILATION OR RESUSCITATION DEVICE)に関する。より詳細には、本発明は、たとえば、個人に送達される空気、酸素、又は酸素富化空気などの量及び速度の制御を有し、使用者の手に容易に収まる構成を有する、手動の用手呼吸である蘇生装置に関する。
【背景技術】
【0002】
用手呼吸法である蘇生法は、個人が自立的に呼吸することができない場合に、個人に対して実行される。通常、これは、病院の1つの区域から、救急治療室及び集中治療室など別の区域へと、患者が移送されるときに行われる。手動蘇生法はまた、正常な心臓及び呼吸器機能を回復する目的で心肺停止の被害者に施される標準的な技法である、心肺蘇生法(CPR)中に行われる。
【0003】
手動蘇生装置からの用手呼吸は、現在、自己吸入式のエラストマー封入容器又はバッグによって提供される。このバッグは、手で圧縮可能であり、顔に取り付けるマスク(又は挿管チューブ)が、バッグの出口通路と流体連通し、マスクとバッグの間の一方向弁により、バッグからマスクへのみの、流体の通過が可能になる。バッグはまた、空気用の1つの開口と、酸素を受け取るための一般により小さい別の開口と、を有する、入口通路を有する。臨床医は、その(片方又は両方の)手でバッグを圧搾することによって、個人に空気又は酸素を送達し、次いで、バッグが完全なサイズまで膨張し、それによって入口通路を通じて空気又は酸素を吸い込むことが可能になるように、バッグを解放する。
【0004】
個人の肺が受け取る空気の量は、バッグの体積に対応する。より大きいバッグは、個人内へと給送される、より大きい最大体積の空気を提供する。通常、小児及び乳児は成人よりも小さい肺を有するので、従来の手動蘇生装置は、たとえば乳児、小児、及び成人など、様々なサイズで提供される。各サイズは、異なる最大空気排出体積をもたらす。容態、身体の大きさ、年齢、性別などの要因に応じて、各個人は、特定の空気体積すなわち1回換気量、及び換気回数(frequency)すなわち毎分当たりの換気体積を必要とすることがある。
【0005】
残念ながら、現在の手動換気又は蘇生装置は、1回換気量の送達の望ましい監視及び制御に適していない。たとえば、蘇生装置の圧潰可能なバッグ部分は、使用者が個人に提供している空気の量を、「感じる」ことを可能にするに過ぎない。これは使用者に、使用者が提供している空気の体積の大まかな推定と、肺が伸展しない(non-compliant)、すなわち加圧されているときの触覚を提供する。自己吸入式の呼吸(蘇生)用封入容器又はバッグは、知られている最大体積に基づいて選択することができるが、実際に送達される体積は、手の大きさ、使用する手の数、技術、意気込み、及び疲労などの要因により、複数の操作者の間でかなり異なる可能性がある。これらの変動は、最適な1回呼吸量の、最大60パーセントとなることが示されている。換気回数もまた、使用者の間で変わる可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
したがって、容態、身体/肺の大きさ、年齢、及び性別などの個人的な要因に関わらず、いかなる患者において使用することもできる、単一の手動用手呼吸又は蘇生装置を開発するための進歩が、当業界で検討されている。
【課題を解決するための手段】
【0007】
本発明は、単一の手動用手呼吸又は蘇生装置である。装置の本体は、投入機構及び排出機構を有する封止された体積を取り囲む、剛性パネルを有する。剛性パネルは、本体が非圧縮状態と圧縮状態との間で動くことが可能になるように、互いに対して動かすことができる。圧縮状態になると、体積回復機構が、体積を圧縮状態から非圧縮状態へと戻して回復させる。
【0008】
本発明の主要な目的の1つは、本体を片手で保持し、本体をその片手で圧縮することができることである。この目的を満たすために、一実施形態では、本体は、手の移動の方向(たとえば本体の高さ)と、この手の移動とは別の少なくとも1つの別の方向(たとえば本体の幅)の、移動を有することによって特徴付けられる。別の実施形態では、本体は、手の移動の方向(たとえば本体の高さ)と、この手の移動とは別の少なくとも2つの別の方向(たとえば本体の幅及び長さ)の、移動を有することによって特徴付けられる。幅及び/又は長さの移動は、高さ移動及び剛性パネルのジオメトリの関数である。
【0009】
パネルの移動は、最大85mm、好ましくは最大20〜25mm、及びより好ましくは、10mm〜15mmである。いくつかの移動は、親指、1本又は複数本の指と、手の水かきとの間に、ぴったりと嵌らなければならない。すなわち、手の把持運動の自然な範囲によって、これらの移動が規定される。状態間の体積変化は、1cc〜500cc(乳児及び小児)、250cc〜1200cc(小児から成人)又は1cc〜から140cc(乳児から成人)の範囲となる。
【0010】
非圧縮状態又は体積の寸法を変化させるための、1つ又は複数の本体移動を調整するために、サイズ調整装置が備えられる。これらのサイズ調整は、最大170mmであり、好ましくは最大25mmである。サイズ調整装置の目的は、移動を調整し、次いで、たとえば個人に送達される空気の、体積を調整することである。したがって、サイズ調整装置はまた、体積調整装置とも呼ばれる。
【0011】
換気回数調整装置は、体積を圧縮状態から非圧縮状態へと回復する時間を調整し、体積を非圧縮状態から圧縮状態へと圧縮する時間を調整するために備えられる。
【0012】
触覚フィードバック、視覚及び/又は聴覚フィードバックを使用者に提供するために、フィードバック機構を備えることができる。触覚フィードバックの一例は、剛性パネル内の開口を被覆するための、たとえば可撓性材料など触覚フィードバック領域を含む。これらの領域によって、使用者が圧縮力又は肺の抵抗を感じることが可能になる。これらの触覚領域は、好ましくは、使用者の手の親指、あるいは1本又は複数の指に適合するように、サイズ決め及び位置決めされる。視覚フィードバック機構の一例は、サイズ(体積)調整又は換気回数のフィードバックを、使用者に提供することである。聴覚フィードバック機構の一例は、圧縮スピード、換気回数、1回換気量、サイズ(体積)調整装置の設定、又は換気回数制御調整装置の設定などのフィードバックを、使用者に提供することである。
【0013】
装置の1つの利点は、非圧縮状態及び圧縮状態の両方において、本体が使用者の手に人間工学的に適合し、それによって手及び/又は腕の筋肉の疲労が減少することである。装置の別の利点は、使用者がおよそ一定の1回換気量及び換気速度に依拠することができるように、体積及び/又は換気回数を調整する能力である。そのような能力によって、体調、身体/肺の大きさ、年齢、及び性別などの個人的な要因に関わらず、装置をいかなる患者において使用することも可能になる。さらに別の利点は、多数の装置を、互いに容易に積み重ね又は重ね合わせることができることである。例示的な実施形態では、構成及び形状は、そのような積重ね又は重合せ能力を備えるように構成することができる。
【0014】
本発明の目的及び利点は、以下の詳細な説明を図面と併せて読むことにより理解されるであろう。
【図面の簡単な説明】
【0015】
【図1】本発明による装置を示す立体斜視図である。
【図2】本発明による装置を示す側面図である。
【図3】本発明による装置を示す平面図である。
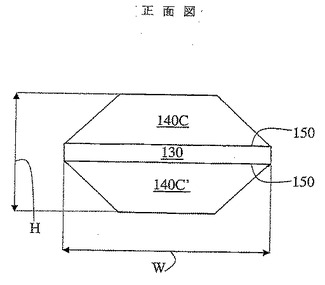
【図4】本発明による装置の本体を示す正面図である。明瞭にするためにマスク又は挿管チューブへの取付けは除外してある。
【図5】本発明による装置を把持し動作させるための手を寸法と共に示す図である。
【図6】本発明による装置を示す組立分解図である。
【図7】本発明による装置のサイズ(体積)調整装置の一例を示す立体斜視図である。
【図8】本発明に従って、装置の本体の体積を圧縮状態から非圧縮状態へと回復させるための機構の一例を示す図である。
【図9】本発明による装置の換気回数調整装置の一例を示す図である。
【図10】本発明による視覚的フィードバック機構の一例を示す図である。
【図11】本発明による触覚的フィードバック機構の一例を示す図である。
【図12】本発明の装置の積重ね又は重ね合わせの一例を示す図である。
【発明を実施するための形態】
【0016】
以下の詳細な説明は、例示のための多くの特異性を含むが、以下の例示的な詳細の多くの変形及び変更が本発明の範囲内にあることを、当業者は容易に理解するであろう。したがって、普遍性を全く損なわずに、かつ特許請求される本発明を限定することなく、本発明の以下の好ましい実施形態を説明する。
【0017】
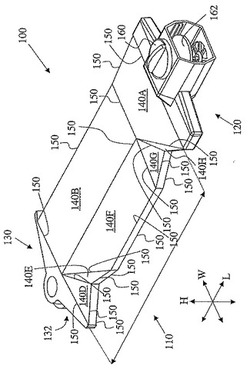
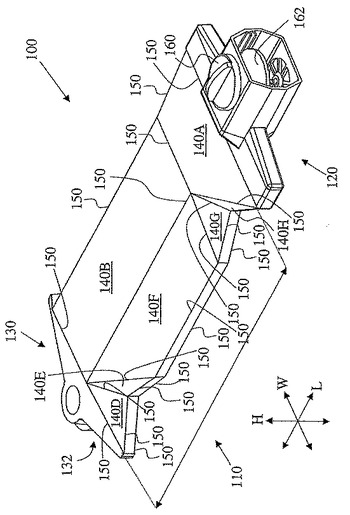
図1に、用手呼吸又は蘇生装置100の一例の立体図を示す。全体的に、3つの部品、すなわち、本体110と、たとえば空気、酸素、酸素富化空気、流体、流体混合物、気体、気体混合物、あるいはそれらの何らかの組合せ又は派生物を、本体110内に投入することを可能にするための投入機構120と、投入された内容物の一部又は全部を、コネクタ132を通じて本体110から個人へと排出及び送達するための排出機構130とを、識別することができる。本体110は、互いに対して動かすことができる剛性のパネルにより特徴付けられる。剛性のパネルを有する本体110の構成の主意は、たとえば空気、酸素、又は酸素富化空気などを収容することができる体積を包囲することである。本発明の別の主意は、装置の本体を片手で保持し、本体をその片手で圧縮することができるようにすることである。本発明において考え出される概念は、説明を読めば明らかとなるように、剛性のパネルを有する本体として概括することができ、本体は、手の1つの移動方向、及び手のその特定の移動方向とは別の少なくとも1つの別方向への、移動を有することを特徴とする。
【0018】
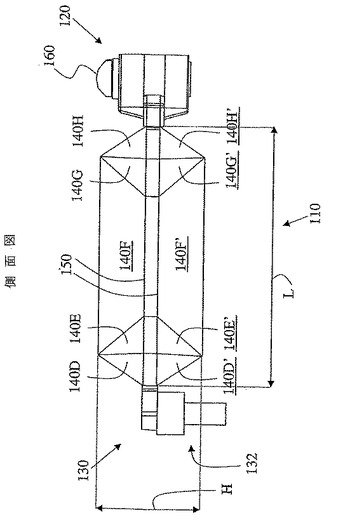
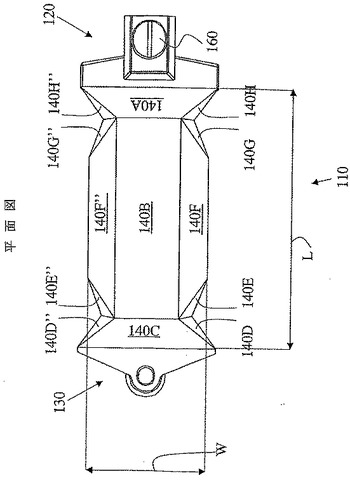
図1の特定の例では、本体110は、たとえば頂部を形成するパネル、底部を形成するパネル、及び各側部のためのパネルなど、複数のパネルにより特徴付けられる。より具体的には、以下の(主な)パネル、すなわち、すべて図1に見ることができるパネル140A,140B,140D,140E,140F,140G,及び140H、すべて図2に見ることができるパネル140D,140E,140F,140G,140H,140D',140E',140F',140G',140H',すべて図3に見ることができるパネル140A,140B,140C,140D,140E,140F,140G,140H,140D'',140E'',140F'',140G'',及び140H''、すべて図4に見ることができるパネル140C及び140C'を、識別することができる。図1〜図4の視野からは、パネル140A',140B',140D''',140E''',140F''',140G''',140H''が遮られている。図において遮られているパネルの相対的な位置及び向きは、本発明に関する当業者には容易に理解される。
【0019】
図1、図2、及び図4の150によって示される可動部品又は構造は、一体継手/ヒンジ、スナップ継手、組立屈曲部、熱収縮された継手又は屈曲部、溶接継手、単純な機械的ヒンジ、ピン留めヒンジ、フレキシブルヒンジなどとすることができる。可動構造のタイプは、剛性パネル及び本体を作り出すために用いられる製造加工のタイプによって決まる。パネル、可動構造、及び本体の、様々なタイプの製造加工の例は、たとえば、ブロー成形、熱融着、オーバーモールド、本体を形成するための可撓性のブラダー又はスキンを用いた、剛性のパネル状シャシの機械的アセンブリ、一体ヒンジを形成するための圧印加工、ヒンジ内の封止部としてガスケットを用いるアセンブリ、射出成形、超音波溶接、高周波(radio frequency)溶接、誘電加熱溶接、高周波(high frequency)溶接、浸漬、押出加工、溶射、はけ積み、接着剤が裏付けされた様々な材料のシートなど及び/又は、互いに対して動かすことができる剛性のパネルを有する本体をもたらす、何らかのタイプの製造加工である。本体110を製作するために、機械及び構成工学分野で知られた技術である様々なタイプの製造加工を利用することができることを、本発明に関する平均的な当業者は容易に理解するであろう。投入機構120及び排出機構130は、本体110の製造工程と共に製造し一体化することができ、又は後に本体110に組み付けることができる。剛性のパネル、投入機構120、排出機構130、及び装置の別の構造に使用することができる材料のタイプは、たとえば、ポリマー、プラスチック、ポリエチレン、ポリカーボネート、耐衝撃性ポリスチレン、Kレジン、ABS、PVC、アセタール、ポリプロピレン、シリコーン、熱可塑性エラストマー、熱可塑性ゴム、ラテックス、織物、厚紙などである。
【0020】
本体110は、空気、酸素、又は酸素富化空気などを充填することができる体積を生み出すようにパネルが位置決めされる、非圧縮状態を有する。本体110は、非圧縮状態から、非圧縮状態での体積に対して体積を減少させるようにパネルが互いに対して動かされる、圧縮状態へと変化することができる。すなわち、剛性パネルを非圧縮状態から圧縮状態へと互いに対して動かすことによって、空気、酸素、又は酸素富化空気が、排出機構130を通して排出される。非圧縮状態は、完全な膨張状態(すなわち最大体積)、又は何らかの中間状態とすることができる(サイズ(体積)調整装置の説明も参照)。体積を回復させることによって、新たな空気、酸素、又は酸素付加空気を、投入機構120を通して体積内に入れることができる。
【0021】
本体110は、高さH、幅W、及び長さLを有する(図1〜図4参照)。一般に、本体110の状態の変化は、本体110の高さHが、圧縮状態と比べて非圧縮状態でより大きいことによって特徴付けることができる。高さの変化によって、幅W及び長さLの変化が生じ、これらは圧縮状態と比べて非圧縮状態でより小さくなる。平均的な技術者が容易に理解するように、幅及び長さの変化は、高さの変化、及びパネルのジオメトリの関数である。本体は、互いにほぼ直交する軸の周りを回転することができる、少なくとも2つのパネルを有することによって特徴付けることができることに留意されたい。たとえばパネル140F及び140Cについて考えると、それらはいずれも高さの変化に関連するが、それらの向きについて考えると、140Fは、さらに幅の変化に関係し、140Cは、さらに長さの変化に関係する。つまり、本体は、手の移動(すなわち本体の高さ)の方向での移動と、手の特定の移動(すなわち本体の高さ)とは別の少なくとも2つの(すなわち本体の幅及び長さ)方向での移動を有することを特徴とする。
【0022】
本体はまた、本発明に関する当業者が理解するように、本体110よりも多い又は少ない数のパネルを有することもできる。たとえばパネルを、中央の頂部及び底部パネルの周りに径方向に組み付けることができ、より多くのパネルを追加することができ、たとえば140Fを、2つ以上のパネルに分割することができる。パネルの数を減少させる一例は、140A,140B及び140Cを2つのみのパネルに減らすことによって、実現することができる。後者の例では、本体は、高さ、及び幅又は長さの変化を有することになる。つまり、そのような本体は、手の移動(すなわち本体の高さ)の方向での移動と、手の特定の移動(すなわち本体の高さ)とは別の少なくとも1つの(すなわち本体の幅又は長さ)方向での移動を有することを特徴とする。
【0023】
上述のように、本発明の主要な目的の1つは、装置を片手で保持することができること、及び本体をその片手で圧縮することができることである。したがって、目的を達成するために、非圧縮状態及び圧縮状態における高さ及び幅の変化は、制約される。というのもそれらは、(i)使用者の手、及び(ii)使用者の運動の把持(又は圧搾)範囲に適合する必要からである。
【0024】
さらに、親指及び1本又は複数本の指は、本体を圧縮するときに機械的な利益(すなわち、回転点に関する長いモーメントアーム)を生み出すように、本体110上に望ましく位置決めされる。そのような機械的な利益は、手の筋肉の疲労、及びまた、潜在的な腕の筋肉の疲労を減少するという、本発明の別の目的を達成する。
【0025】
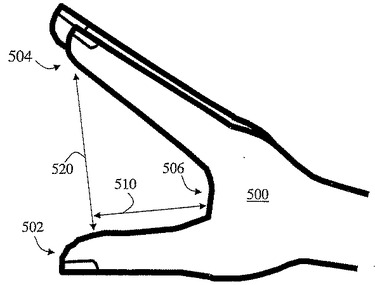
図5は、親指502、1本又は複数本の指504、及び手の水かき506を有し、通常その間で本体110が保持される、手500を示す。様々な手のサイズ(たとえば男性、女性、大きい、小さいなど)を考慮すると、適当な運動範囲、及び使用者の手へのぴったりと嵌る適合性を決定することができ、それによって、非圧縮状態と圧縮状態の間で動かすときの、本体110の高さ及び幅の寸法が制約される。たとえば、単一のパネルの高さ及び幅(移動)の変化は、最大85mm、好ましくは20〜25mm、及びより好ましくは最大10〜15mmとすることができる。高さの変化は、図5の手の移動520に対応し、幅の変化は、図5の手の移動510に対応する。パネルのジオメトリ(寸法及び相対角度)は、所望の高さ及び幅(移動)の変化、ならびに所望の送達可能な一回換気量に合うように変えることができることを、本発明に関する平均的当業者は容易に理解するであろう。
【0026】
単一のパネルの長さの変化もまた、最大85mmとすることができるが、手の寸法によって制約されず、体積の変化の決定における変数となる。体積の変化は通常、小児及び成人のための1回換気量を包含する、1cc〜1400cc、好ましくは250cc〜1200ccの範囲である。装置が乳児又は小児用途で使用される場合、体積変化はより小さく、1cc〜500ccの範囲である。
【0027】
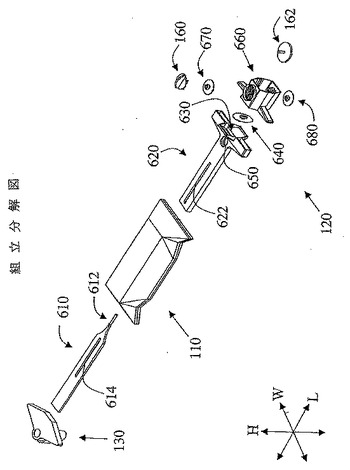
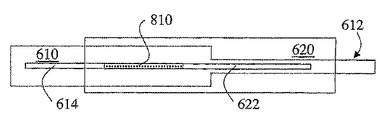
図6は、本発明の装置の一実施形態を示す分解図である。上記で議論した要素に加えて、装置は、排出機構130に連結され本体110の内部に位置決めされる、主シャフト610をさらに備える。主シャフト610は、狭い(円筒状)端部612、及びスロット614を有する。装置は、投入機構630に連結され(又は単一の部品とすることができ)、同様に本体110内に位置決めされる、受容シャフト620をさらに有する。受容シャフト620は、受容シャフト620の長さに沿って主シャフト610が移動することを可能にするようにサイズ決めされた、開口(図示せず)を有する。受容シャフト620はさらに、スロット614と好ましくは等しいサイズであるスロット622を有し、図8に関して圧縮状態から非圧縮状態への体積の回復について議論するときに理解されるように、スロット614と622はまた、互いに位置合せされるべきである。開口630は、要素660を、超音波溶接、スナップ嵌め、締まり嵌め、接着剤、又は機械及び構成工学の分野で知られた別の何らかの技術によって機械的に組み立てることができるように、サイズ決めすることができる。要素660によって、空気/酸素投入装置の適合及び取付けが可能になる。フラッター弁640は、要素660の前方開口に嵌められ、たとえば、空気が開口650を通り受容シャフト620、次いで本体110内へと、移動することを可能にする。要素660はさらに、サイズ調整装置(体積調整装置とも呼ぶ)を収容する。
【0028】
一般に、装置のサイズ調整装置は、長さの変化、幅の変化、及び/又は高さの変化を調整する。サイズ調整装置は、使用者が、たとえば空気、酸素、又は酸素富化空気などのかなり定常的な送達可能な体積に依拠することができるように、送達可能な体積を容易に調整するという目的を果たす。送達可能な体積を調整することは、容態、身体の大きさ、年齢、性別などの要因を補正するために、重要である。
【0029】
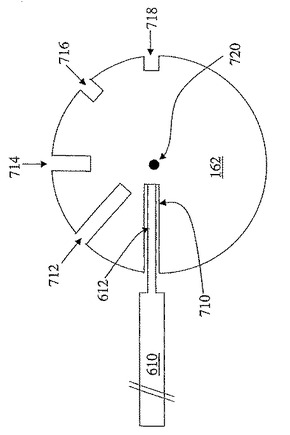
好ましい一実施形態では、サイズ調整装置は、投入機構120、特に要素660と一体化され、本体110の移動長さを調整する。サイズ調整装置は、要素660の頂部上に配置され、使用者が都合良くアクセスすることができる、調整ノブ160により特徴付けられる。調整ノブ160が、この例では要素660の内部に位置決めされる調整ダイアル162へと連結され、連結部には、たとえば弁670又は680のいずれかを用いることができる。
【0030】
図7は、多数のスロット710,712,714,716及び718を有する、調整ダイアル162を示す。これらのスロットは、非圧縮状態と圧縮状態の間で動くときに、受容シャフト620の開口(ならびに図示しないフラッター弁640)全体を通って移動することができる主シャフト610の、狭い(円筒状の)端部612に適合するようにサイズ決めされる。調整ノブ160を変化させることによって、調整ダイアル162は、回転軸720の周りで新たなスロット位置まで回転させられるが、これは通常、本体が圧縮された状態で行われる。サイズ調整装置が、非圧縮状態又は体積の寸法を変化させることに留意されたい。
【0031】
スロットは、主シャフト610の移動距離を制限し、それによって、個人への送達可能な体積を制御する。スロットサイズは、長さの変化を可能にするために、最大170mm、及び好ましくは最大25mmとすることができる。スロットの数及びスロットのサイズは、呼吸器又は緊急医療の当業者が容易に理解するような、適当な範囲の送達可能な1回換気量を包含するように選択される。
【0032】
図7の例では、サイズ(長さ)(体積)調整装置は、本体110の外側に配置される。サイズ調整装置はまた、本体の内側に位置決めし、又は本体の構成に内在させることができることを、本発明に関する平均的な当業者は理解するであろう。さらに、幅又は高さの制御のために、あるいは、高さ、長さ、もしくは幅、又は別の何らかの方向の何らかの組合せの制御のために、図7に示すのと同様のやり方でサイズ調整装置を追加することもできる。
【0033】
スロットを有するサイズ調整装置の代わりに、様々なタイプの機構を構成及び一体化することができ、これらはすべて本発明の範囲に含まれる。そのような変形形態の例は、たとえば、主シャフトのための調整可能なねじ付け停止部、各チャンバが溝を有し又は各チャンバが異なる深さを有する、チャンバを有する要素、主シャフトの移動の制約を設定するための様々な位置のスロットを有する、スロット付きチューブ、誤った状態又は非圧縮状態に調整されたときに偏位する、偏位停止部、停止部を有するラックピニオンシステム、ラチェットバンド(調整可能なジップタイ)、調整可能なカム、誤った状態又は非圧縮状態に調整されたときに偏位する、ばね荷重停止部の回転ダイアル、あるいは、排出体積を制御するために主シャフトの移動を制約する何らかのタイプの工学機構などである。
【0034】
図8は、圧縮状態から非圧縮状態へと体積を戻すための、体積回復機構の一例を示す。これは、主シャフト610を受容シャフト620の内部で移動させ、それによってスロット614及び622(の一部)を互いに一直線に移動させることによって実現させることができる。スロット614の1つの部位が、たとえば引張ばね、プラスチック、又はゴムなど要素810によって、スロット622の対向部位に連結される。非圧縮状態から圧縮状態に変化するとき、要素810内に力が蓄積される。次いでこの力は、本体110に加えられた圧縮力を使用者が解放するとき、本体を非圧縮状態へと戻すために使用される。本発明に関する平均的な当業者が理解するように、体積回復機構はまた、本体110の外部にあってもよく、又は本体110に内在させることもできる(たとえば回復力を、可動接合部150の内在的な特性として有することができる)。別の代替形態は、圧縮されたとき力を蓄積する、本体110内の板ばね機構、又は、本体110の内部に配置されるが2つのシャフトに一体化されない引っ張りばね/機構である。体積回復機構は、サイズ(体積)調整装置に関して議論されたのと同様の技術を用いて調整することができ、又は、1つの設定のままとすることができる。
【0035】
一代替実施形態では、装置は、(i)体積を圧縮状態から非圧縮状態へと回復させ、かつ/又は(ii)体積を非圧縮状態から圧縮状態へと圧縮するための、時間を設定及び制御するための換気回数調整装置を備える。上記で議論されたような体積回復機構は、換気回数調整装置/制御装置として使用することができる。ただし、このようにする場合、換気回数制御装置は、依然使用者の手の中にあり、装置によって拘束されない。換気回数の制御は、1回換気の速度の一貫性を強化するために望ましい。したがって、別の実施形態では、換気回数調整装置は、サイズ調整装置と同様のやり方で追加される。
【0036】
換気回数制御ノブは、要素660の反対側の部位に配置することができ、たとえば、主シャフトの緩和を設定するために主シャフトと組み合わされるラックピニオン機構、回転的に抵抗する歯車と結合されるラックピニオン機構、ポリマーの逃がし機構、摩擦ブレーキ、回転的に抵抗するラチェットホイール、又は主シャフトの移動を偏位させるためのトラックなどによって、換気回数を調整するために実装することができる。機械及び構成工学の分野で知られたそのような機構はすべて、主シャフトの移動の緩和を変化させるために、換気回数制御ノブによって調整することができ、緩和の増大によって、換気回数の低下がもたらされる。サイズ調整装置機構と同様に、換気回数調整装置もまた、本体の内部又は本体の外部にあり、あるいは本体に内在させることができる。
【0037】
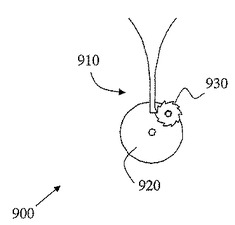
図9は、換気回数制御ノブ920上に配置されたラチェット機構910によって実現される、換気回数制御機構900の一実施形態の一例を示す。換気回数制御ノブ920は、同一のノブから、体積制御ノブ610へと上方に延びることができ、裏返しにされ、要素660の底部に組み付けられる。ラチェットホイール930は、たとえばスナップ嵌め、締結具、又は別の手段などによって、換気回数制御ノブ920へと組み付けることができる。換気回数制御ノブ920は、主ロッドの移動と一致して、又はその移動とは別に、ラチェットホイール930と共に回転させることができる。ラチェットホイールの回転は、たとえば摩擦挿入物、ロールピン、コイル又は腕時計用ばね、高耐摩耗性ディスクなど、多数の方法によって緩和させることができる。換気回数制御ノブ920の回転方向に応じて、主ロッド610への抵抗を調整するために、様々なラチェットホイールが、換気回数制御ノブ920の周囲に沿って存在することができる。
【0038】
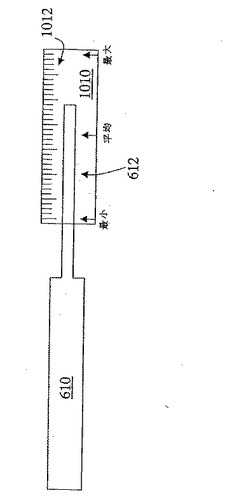
サイズ、主シャフトの移動、又は換気回数の調整の視覚的なフィードバック(色、印、記号など)を使用者に提供するために、視覚的なフィードバック機構を追加することができる。図10は、サイズ(体積)の調整のための、視覚的なフィードバック機構の一例を示す。主シャフト610は、たとえば最小min、平均avg、及び最大maxの、送達可能な1回換気量を指示するように構成された、定規1010を横断して移動することができる。印1012に対する、主シャフト610の狭い端部612の相対的な位置は、所望の体積の微調節をさらに助ける。視覚的なフィードバック機構は、本体の内側に配置することができ、本体は、使用者が視覚的なフィードバック機構を見ることを可能にする、透明な部分を有する。同様のフィードバック機構を、換気回数用にも適用することができる。
【0039】
圧縮の速さ、換気回数、1回換気量、サイズ(体積)調整装置の設定、又は換気回数制御調整装置の設定のフィードバックを提供する、聴覚的なフィードバック機構(警報、タイマー、命令、警告など)を、さらに追加することができる。別の例は、(1つ又は複数の)シャフト及び/又は体積の変化に関連する、クリック止め(click)機構を有する。クリック音はまた、たとえばクリックを手で感じることができるなど、触覚的なフィードバックとして使用することもできる。
【0040】
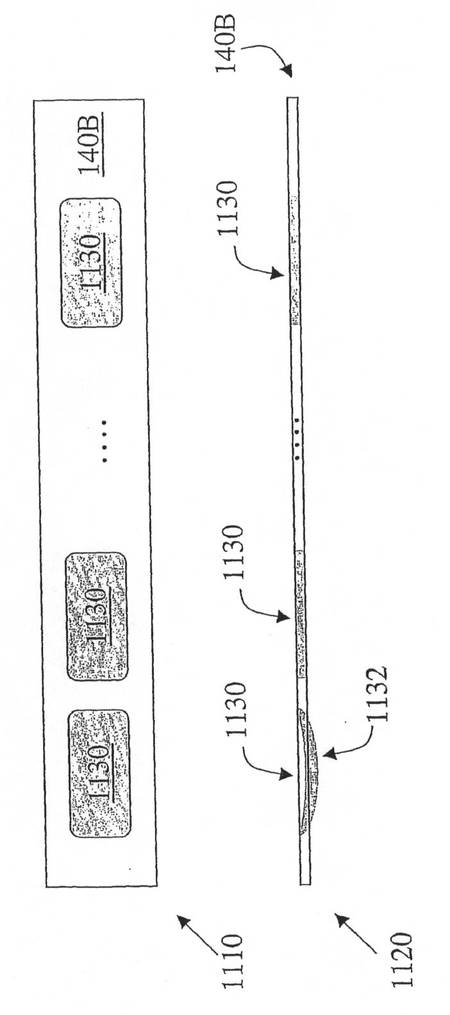
さらに別の実施形態では、図11に示すようなパネル140Bなど、1つ又は複数のパネル上に、触覚フィードバック領域1130を追加することができる。1110は平面図であり、1120は側面図である。触覚フィードバック領域1130は、手の親指、又は手の1本又は複数本の指(すなわちパネル140B'上の)に適合するように、サイズ決め及び位置決めされる。これらの領域は、親指又は指の圧力、ならびに、たとえば本体内の空気/酸素からの圧力に応答する、可撓性材料製である。これは使用者に、圧縮力及び肺の抵抗のさらなるフィードバックを提供する。剛性パネル140Bに対する、可撓性材料1130の撓み1132は、圧縮中にたとえば指によって生じた撓みを示す。
【0041】
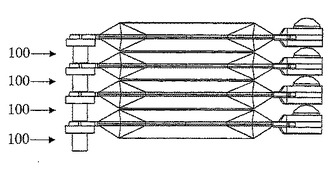
図12は、多数の装置100を互いに積み重ね又は重ね合わせた一例を示す。積重ね又は重ね合わせは、たとえば救急車内など空間が制限されている場合、及び多数の装置が必要とされることがある場合などに有利となる。1つの例では、投入機構、本体、及び/又は排出機構の構成及びジオメトリによって、それらを互いに重ね合わせることが可能になる。たとえば、排出機構の頂部は、別の排出機構の底部内へと重ね合わせることができる(投入機構についても同様の重ね合わせを確立することができる)。装置を互いに嵌め合わせること以外に、装置はまた、側部から側部への運動を防止する、たとえばリブ、凹み、Velcro(登録商標)、スナップ機構などの特徴を有することもできる。
【0042】
本発明及びその利点を詳細に説明してきたが、本発明は、本明細書で示し又は議論したことによって限定又は規定されないことが、理解されるべきである。本明細書の図面、説明、議論は、本発明の例を示し、本発明の使用例を提供する。本発明の原理、精神、又は法的範囲から逸脱することなく、本発明の実装形態を製作することができることを、当業者は理解するであろう。したがって、本発明の範囲は、添付の特許請求の範囲及びその法的同等物によってのみ決定されるべきである。
【符号の説明】
【0043】
100 蘇生装置
110 本体
120 投入機構
132 コネクタ
130 排出機構
140A,140B,140C,140D,140E,140F,140G,140H,140A',140B',140C',140D',140E',140F',140G',140H',140D'',140E'',140F'',140G'',140H'',140D''',140E''',140G''',140H''' パネル
150 可動部品
160 調整ノブ
162 調整ダイアル
H 高さ
W 幅
L 長さ
502 親指
504 指
506 水かき
610 主シャフト
612 端部
614 スロット
620 受容シャフト
622 スロット
630 開口
640 フラッター弁
660 要素
650 開口
670又は680 弁
710,712,714,716,718 スロット
720 回転軸
810 要素
900 換気回数制御機構
910 ラチェット機構
920 換気回数制御ノブ
930 ラチェットホイール
1010 定規
1012 印
1130 触覚フィードバック領域
1132 撓み
【技術分野】
【0001】
本発明は、一般に、手動の用手呼吸である蘇生装置(MANUAL VENTILATION OR RESUSCITATION DEVICE)に関する。より詳細には、本発明は、たとえば、個人に送達される空気、酸素、又は酸素富化空気などの量及び速度の制御を有し、使用者の手に容易に収まる構成を有する、手動の用手呼吸である蘇生装置に関する。
【背景技術】
【0002】
用手呼吸法である蘇生法は、個人が自立的に呼吸することができない場合に、個人に対して実行される。通常、これは、病院の1つの区域から、救急治療室及び集中治療室など別の区域へと、患者が移送されるときに行われる。手動蘇生法はまた、正常な心臓及び呼吸器機能を回復する目的で心肺停止の被害者に施される標準的な技法である、心肺蘇生法(CPR)中に行われる。
【0003】
手動蘇生装置からの用手呼吸は、現在、自己吸入式のエラストマー封入容器又はバッグによって提供される。このバッグは、手で圧縮可能であり、顔に取り付けるマスク(又は挿管チューブ)が、バッグの出口通路と流体連通し、マスクとバッグの間の一方向弁により、バッグからマスクへのみの、流体の通過が可能になる。バッグはまた、空気用の1つの開口と、酸素を受け取るための一般により小さい別の開口と、を有する、入口通路を有する。臨床医は、その(片方又は両方の)手でバッグを圧搾することによって、個人に空気又は酸素を送達し、次いで、バッグが完全なサイズまで膨張し、それによって入口通路を通じて空気又は酸素を吸い込むことが可能になるように、バッグを解放する。
【0004】
個人の肺が受け取る空気の量は、バッグの体積に対応する。より大きいバッグは、個人内へと給送される、より大きい最大体積の空気を提供する。通常、小児及び乳児は成人よりも小さい肺を有するので、従来の手動蘇生装置は、たとえば乳児、小児、及び成人など、様々なサイズで提供される。各サイズは、異なる最大空気排出体積をもたらす。容態、身体の大きさ、年齢、性別などの要因に応じて、各個人は、特定の空気体積すなわち1回換気量、及び換気回数(frequency)すなわち毎分当たりの換気体積を必要とすることがある。
【0005】
残念ながら、現在の手動換気又は蘇生装置は、1回換気量の送達の望ましい監視及び制御に適していない。たとえば、蘇生装置の圧潰可能なバッグ部分は、使用者が個人に提供している空気の量を、「感じる」ことを可能にするに過ぎない。これは使用者に、使用者が提供している空気の体積の大まかな推定と、肺が伸展しない(non-compliant)、すなわち加圧されているときの触覚を提供する。自己吸入式の呼吸(蘇生)用封入容器又はバッグは、知られている最大体積に基づいて選択することができるが、実際に送達される体積は、手の大きさ、使用する手の数、技術、意気込み、及び疲労などの要因により、複数の操作者の間でかなり異なる可能性がある。これらの変動は、最適な1回呼吸量の、最大60パーセントとなることが示されている。換気回数もまた、使用者の間で変わる可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
したがって、容態、身体/肺の大きさ、年齢、及び性別などの個人的な要因に関わらず、いかなる患者において使用することもできる、単一の手動用手呼吸又は蘇生装置を開発するための進歩が、当業界で検討されている。
【課題を解決するための手段】
【0007】
本発明は、単一の手動用手呼吸又は蘇生装置である。装置の本体は、投入機構及び排出機構を有する封止された体積を取り囲む、剛性パネルを有する。剛性パネルは、本体が非圧縮状態と圧縮状態との間で動くことが可能になるように、互いに対して動かすことができる。圧縮状態になると、体積回復機構が、体積を圧縮状態から非圧縮状態へと戻して回復させる。
【0008】
本発明の主要な目的の1つは、本体を片手で保持し、本体をその片手で圧縮することができることである。この目的を満たすために、一実施形態では、本体は、手の移動の方向(たとえば本体の高さ)と、この手の移動とは別の少なくとも1つの別の方向(たとえば本体の幅)の、移動を有することによって特徴付けられる。別の実施形態では、本体は、手の移動の方向(たとえば本体の高さ)と、この手の移動とは別の少なくとも2つの別の方向(たとえば本体の幅及び長さ)の、移動を有することによって特徴付けられる。幅及び/又は長さの移動は、高さ移動及び剛性パネルのジオメトリの関数である。
【0009】
パネルの移動は、最大85mm、好ましくは最大20〜25mm、及びより好ましくは、10mm〜15mmである。いくつかの移動は、親指、1本又は複数本の指と、手の水かきとの間に、ぴったりと嵌らなければならない。すなわち、手の把持運動の自然な範囲によって、これらの移動が規定される。状態間の体積変化は、1cc〜500cc(乳児及び小児)、250cc〜1200cc(小児から成人)又は1cc〜から140cc(乳児から成人)の範囲となる。
【0010】
非圧縮状態又は体積の寸法を変化させるための、1つ又は複数の本体移動を調整するために、サイズ調整装置が備えられる。これらのサイズ調整は、最大170mmであり、好ましくは最大25mmである。サイズ調整装置の目的は、移動を調整し、次いで、たとえば個人に送達される空気の、体積を調整することである。したがって、サイズ調整装置はまた、体積調整装置とも呼ばれる。
【0011】
換気回数調整装置は、体積を圧縮状態から非圧縮状態へと回復する時間を調整し、体積を非圧縮状態から圧縮状態へと圧縮する時間を調整するために備えられる。
【0012】
触覚フィードバック、視覚及び/又は聴覚フィードバックを使用者に提供するために、フィードバック機構を備えることができる。触覚フィードバックの一例は、剛性パネル内の開口を被覆するための、たとえば可撓性材料など触覚フィードバック領域を含む。これらの領域によって、使用者が圧縮力又は肺の抵抗を感じることが可能になる。これらの触覚領域は、好ましくは、使用者の手の親指、あるいは1本又は複数の指に適合するように、サイズ決め及び位置決めされる。視覚フィードバック機構の一例は、サイズ(体積)調整又は換気回数のフィードバックを、使用者に提供することである。聴覚フィードバック機構の一例は、圧縮スピード、換気回数、1回換気量、サイズ(体積)調整装置の設定、又は換気回数制御調整装置の設定などのフィードバックを、使用者に提供することである。
【0013】
装置の1つの利点は、非圧縮状態及び圧縮状態の両方において、本体が使用者の手に人間工学的に適合し、それによって手及び/又は腕の筋肉の疲労が減少することである。装置の別の利点は、使用者がおよそ一定の1回換気量及び換気速度に依拠することができるように、体積及び/又は換気回数を調整する能力である。そのような能力によって、体調、身体/肺の大きさ、年齢、及び性別などの個人的な要因に関わらず、装置をいかなる患者において使用することも可能になる。さらに別の利点は、多数の装置を、互いに容易に積み重ね又は重ね合わせることができることである。例示的な実施形態では、構成及び形状は、そのような積重ね又は重合せ能力を備えるように構成することができる。
【0014】
本発明の目的及び利点は、以下の詳細な説明を図面と併せて読むことにより理解されるであろう。
【図面の簡単な説明】
【0015】
【図1】本発明による装置を示す立体斜視図である。
【図2】本発明による装置を示す側面図である。
【図3】本発明による装置を示す平面図である。
【図4】本発明による装置の本体を示す正面図である。明瞭にするためにマスク又は挿管チューブへの取付けは除外してある。
【図5】本発明による装置を把持し動作させるための手を寸法と共に示す図である。
【図6】本発明による装置を示す組立分解図である。
【図7】本発明による装置のサイズ(体積)調整装置の一例を示す立体斜視図である。
【図8】本発明に従って、装置の本体の体積を圧縮状態から非圧縮状態へと回復させるための機構の一例を示す図である。
【図9】本発明による装置の換気回数調整装置の一例を示す図である。
【図10】本発明による視覚的フィードバック機構の一例を示す図である。
【図11】本発明による触覚的フィードバック機構の一例を示す図である。
【図12】本発明の装置の積重ね又は重ね合わせの一例を示す図である。
【発明を実施するための形態】
【0016】
以下の詳細な説明は、例示のための多くの特異性を含むが、以下の例示的な詳細の多くの変形及び変更が本発明の範囲内にあることを、当業者は容易に理解するであろう。したがって、普遍性を全く損なわずに、かつ特許請求される本発明を限定することなく、本発明の以下の好ましい実施形態を説明する。
【0017】
図1に、用手呼吸又は蘇生装置100の一例の立体図を示す。全体的に、3つの部品、すなわち、本体110と、たとえば空気、酸素、酸素富化空気、流体、流体混合物、気体、気体混合物、あるいはそれらの何らかの組合せ又は派生物を、本体110内に投入することを可能にするための投入機構120と、投入された内容物の一部又は全部を、コネクタ132を通じて本体110から個人へと排出及び送達するための排出機構130とを、識別することができる。本体110は、互いに対して動かすことができる剛性のパネルにより特徴付けられる。剛性のパネルを有する本体110の構成の主意は、たとえば空気、酸素、又は酸素富化空気などを収容することができる体積を包囲することである。本発明の別の主意は、装置の本体を片手で保持し、本体をその片手で圧縮することができるようにすることである。本発明において考え出される概念は、説明を読めば明らかとなるように、剛性のパネルを有する本体として概括することができ、本体は、手の1つの移動方向、及び手のその特定の移動方向とは別の少なくとも1つの別方向への、移動を有することを特徴とする。
【0018】
図1の特定の例では、本体110は、たとえば頂部を形成するパネル、底部を形成するパネル、及び各側部のためのパネルなど、複数のパネルにより特徴付けられる。より具体的には、以下の(主な)パネル、すなわち、すべて図1に見ることができるパネル140A,140B,140D,140E,140F,140G,及び140H、すべて図2に見ることができるパネル140D,140E,140F,140G,140H,140D',140E',140F',140G',140H',すべて図3に見ることができるパネル140A,140B,140C,140D,140E,140F,140G,140H,140D'',140E'',140F'',140G'',及び140H''、すべて図4に見ることができるパネル140C及び140C'を、識別することができる。図1〜図4の視野からは、パネル140A',140B',140D''',140E''',140F''',140G''',140H''が遮られている。図において遮られているパネルの相対的な位置及び向きは、本発明に関する当業者には容易に理解される。
【0019】
図1、図2、及び図4の150によって示される可動部品又は構造は、一体継手/ヒンジ、スナップ継手、組立屈曲部、熱収縮された継手又は屈曲部、溶接継手、単純な機械的ヒンジ、ピン留めヒンジ、フレキシブルヒンジなどとすることができる。可動構造のタイプは、剛性パネル及び本体を作り出すために用いられる製造加工のタイプによって決まる。パネル、可動構造、及び本体の、様々なタイプの製造加工の例は、たとえば、ブロー成形、熱融着、オーバーモールド、本体を形成するための可撓性のブラダー又はスキンを用いた、剛性のパネル状シャシの機械的アセンブリ、一体ヒンジを形成するための圧印加工、ヒンジ内の封止部としてガスケットを用いるアセンブリ、射出成形、超音波溶接、高周波(radio frequency)溶接、誘電加熱溶接、高周波(high frequency)溶接、浸漬、押出加工、溶射、はけ積み、接着剤が裏付けされた様々な材料のシートなど及び/又は、互いに対して動かすことができる剛性のパネルを有する本体をもたらす、何らかのタイプの製造加工である。本体110を製作するために、機械及び構成工学分野で知られた技術である様々なタイプの製造加工を利用することができることを、本発明に関する平均的な当業者は容易に理解するであろう。投入機構120及び排出機構130は、本体110の製造工程と共に製造し一体化することができ、又は後に本体110に組み付けることができる。剛性のパネル、投入機構120、排出機構130、及び装置の別の構造に使用することができる材料のタイプは、たとえば、ポリマー、プラスチック、ポリエチレン、ポリカーボネート、耐衝撃性ポリスチレン、Kレジン、ABS、PVC、アセタール、ポリプロピレン、シリコーン、熱可塑性エラストマー、熱可塑性ゴム、ラテックス、織物、厚紙などである。
【0020】
本体110は、空気、酸素、又は酸素富化空気などを充填することができる体積を生み出すようにパネルが位置決めされる、非圧縮状態を有する。本体110は、非圧縮状態から、非圧縮状態での体積に対して体積を減少させるようにパネルが互いに対して動かされる、圧縮状態へと変化することができる。すなわち、剛性パネルを非圧縮状態から圧縮状態へと互いに対して動かすことによって、空気、酸素、又は酸素富化空気が、排出機構130を通して排出される。非圧縮状態は、完全な膨張状態(すなわち最大体積)、又は何らかの中間状態とすることができる(サイズ(体積)調整装置の説明も参照)。体積を回復させることによって、新たな空気、酸素、又は酸素付加空気を、投入機構120を通して体積内に入れることができる。
【0021】
本体110は、高さH、幅W、及び長さLを有する(図1〜図4参照)。一般に、本体110の状態の変化は、本体110の高さHが、圧縮状態と比べて非圧縮状態でより大きいことによって特徴付けることができる。高さの変化によって、幅W及び長さLの変化が生じ、これらは圧縮状態と比べて非圧縮状態でより小さくなる。平均的な技術者が容易に理解するように、幅及び長さの変化は、高さの変化、及びパネルのジオメトリの関数である。本体は、互いにほぼ直交する軸の周りを回転することができる、少なくとも2つのパネルを有することによって特徴付けることができることに留意されたい。たとえばパネル140F及び140Cについて考えると、それらはいずれも高さの変化に関連するが、それらの向きについて考えると、140Fは、さらに幅の変化に関係し、140Cは、さらに長さの変化に関係する。つまり、本体は、手の移動(すなわち本体の高さ)の方向での移動と、手の特定の移動(すなわち本体の高さ)とは別の少なくとも2つの(すなわち本体の幅及び長さ)方向での移動を有することを特徴とする。
【0022】
本体はまた、本発明に関する当業者が理解するように、本体110よりも多い又は少ない数のパネルを有することもできる。たとえばパネルを、中央の頂部及び底部パネルの周りに径方向に組み付けることができ、より多くのパネルを追加することができ、たとえば140Fを、2つ以上のパネルに分割することができる。パネルの数を減少させる一例は、140A,140B及び140Cを2つのみのパネルに減らすことによって、実現することができる。後者の例では、本体は、高さ、及び幅又は長さの変化を有することになる。つまり、そのような本体は、手の移動(すなわち本体の高さ)の方向での移動と、手の特定の移動(すなわち本体の高さ)とは別の少なくとも1つの(すなわち本体の幅又は長さ)方向での移動を有することを特徴とする。
【0023】
上述のように、本発明の主要な目的の1つは、装置を片手で保持することができること、及び本体をその片手で圧縮することができることである。したがって、目的を達成するために、非圧縮状態及び圧縮状態における高さ及び幅の変化は、制約される。というのもそれらは、(i)使用者の手、及び(ii)使用者の運動の把持(又は圧搾)範囲に適合する必要からである。
【0024】
さらに、親指及び1本又は複数本の指は、本体を圧縮するときに機械的な利益(すなわち、回転点に関する長いモーメントアーム)を生み出すように、本体110上に望ましく位置決めされる。そのような機械的な利益は、手の筋肉の疲労、及びまた、潜在的な腕の筋肉の疲労を減少するという、本発明の別の目的を達成する。
【0025】
図5は、親指502、1本又は複数本の指504、及び手の水かき506を有し、通常その間で本体110が保持される、手500を示す。様々な手のサイズ(たとえば男性、女性、大きい、小さいなど)を考慮すると、適当な運動範囲、及び使用者の手へのぴったりと嵌る適合性を決定することができ、それによって、非圧縮状態と圧縮状態の間で動かすときの、本体110の高さ及び幅の寸法が制約される。たとえば、単一のパネルの高さ及び幅(移動)の変化は、最大85mm、好ましくは20〜25mm、及びより好ましくは最大10〜15mmとすることができる。高さの変化は、図5の手の移動520に対応し、幅の変化は、図5の手の移動510に対応する。パネルのジオメトリ(寸法及び相対角度)は、所望の高さ及び幅(移動)の変化、ならびに所望の送達可能な一回換気量に合うように変えることができることを、本発明に関する平均的当業者は容易に理解するであろう。
【0026】
単一のパネルの長さの変化もまた、最大85mmとすることができるが、手の寸法によって制約されず、体積の変化の決定における変数となる。体積の変化は通常、小児及び成人のための1回換気量を包含する、1cc〜1400cc、好ましくは250cc〜1200ccの範囲である。装置が乳児又は小児用途で使用される場合、体積変化はより小さく、1cc〜500ccの範囲である。
【0027】
図6は、本発明の装置の一実施形態を示す分解図である。上記で議論した要素に加えて、装置は、排出機構130に連結され本体110の内部に位置決めされる、主シャフト610をさらに備える。主シャフト610は、狭い(円筒状)端部612、及びスロット614を有する。装置は、投入機構630に連結され(又は単一の部品とすることができ)、同様に本体110内に位置決めされる、受容シャフト620をさらに有する。受容シャフト620は、受容シャフト620の長さに沿って主シャフト610が移動することを可能にするようにサイズ決めされた、開口(図示せず)を有する。受容シャフト620はさらに、スロット614と好ましくは等しいサイズであるスロット622を有し、図8に関して圧縮状態から非圧縮状態への体積の回復について議論するときに理解されるように、スロット614と622はまた、互いに位置合せされるべきである。開口630は、要素660を、超音波溶接、スナップ嵌め、締まり嵌め、接着剤、又は機械及び構成工学の分野で知られた別の何らかの技術によって機械的に組み立てることができるように、サイズ決めすることができる。要素660によって、空気/酸素投入装置の適合及び取付けが可能になる。フラッター弁640は、要素660の前方開口に嵌められ、たとえば、空気が開口650を通り受容シャフト620、次いで本体110内へと、移動することを可能にする。要素660はさらに、サイズ調整装置(体積調整装置とも呼ぶ)を収容する。
【0028】
一般に、装置のサイズ調整装置は、長さの変化、幅の変化、及び/又は高さの変化を調整する。サイズ調整装置は、使用者が、たとえば空気、酸素、又は酸素富化空気などのかなり定常的な送達可能な体積に依拠することができるように、送達可能な体積を容易に調整するという目的を果たす。送達可能な体積を調整することは、容態、身体の大きさ、年齢、性別などの要因を補正するために、重要である。
【0029】
好ましい一実施形態では、サイズ調整装置は、投入機構120、特に要素660と一体化され、本体110の移動長さを調整する。サイズ調整装置は、要素660の頂部上に配置され、使用者が都合良くアクセスすることができる、調整ノブ160により特徴付けられる。調整ノブ160が、この例では要素660の内部に位置決めされる調整ダイアル162へと連結され、連結部には、たとえば弁670又は680のいずれかを用いることができる。
【0030】
図7は、多数のスロット710,712,714,716及び718を有する、調整ダイアル162を示す。これらのスロットは、非圧縮状態と圧縮状態の間で動くときに、受容シャフト620の開口(ならびに図示しないフラッター弁640)全体を通って移動することができる主シャフト610の、狭い(円筒状の)端部612に適合するようにサイズ決めされる。調整ノブ160を変化させることによって、調整ダイアル162は、回転軸720の周りで新たなスロット位置まで回転させられるが、これは通常、本体が圧縮された状態で行われる。サイズ調整装置が、非圧縮状態又は体積の寸法を変化させることに留意されたい。
【0031】
スロットは、主シャフト610の移動距離を制限し、それによって、個人への送達可能な体積を制御する。スロットサイズは、長さの変化を可能にするために、最大170mm、及び好ましくは最大25mmとすることができる。スロットの数及びスロットのサイズは、呼吸器又は緊急医療の当業者が容易に理解するような、適当な範囲の送達可能な1回換気量を包含するように選択される。
【0032】
図7の例では、サイズ(長さ)(体積)調整装置は、本体110の外側に配置される。サイズ調整装置はまた、本体の内側に位置決めし、又は本体の構成に内在させることができることを、本発明に関する平均的な当業者は理解するであろう。さらに、幅又は高さの制御のために、あるいは、高さ、長さ、もしくは幅、又は別の何らかの方向の何らかの組合せの制御のために、図7に示すのと同様のやり方でサイズ調整装置を追加することもできる。
【0033】
スロットを有するサイズ調整装置の代わりに、様々なタイプの機構を構成及び一体化することができ、これらはすべて本発明の範囲に含まれる。そのような変形形態の例は、たとえば、主シャフトのための調整可能なねじ付け停止部、各チャンバが溝を有し又は各チャンバが異なる深さを有する、チャンバを有する要素、主シャフトの移動の制約を設定するための様々な位置のスロットを有する、スロット付きチューブ、誤った状態又は非圧縮状態に調整されたときに偏位する、偏位停止部、停止部を有するラックピニオンシステム、ラチェットバンド(調整可能なジップタイ)、調整可能なカム、誤った状態又は非圧縮状態に調整されたときに偏位する、ばね荷重停止部の回転ダイアル、あるいは、排出体積を制御するために主シャフトの移動を制約する何らかのタイプの工学機構などである。
【0034】
図8は、圧縮状態から非圧縮状態へと体積を戻すための、体積回復機構の一例を示す。これは、主シャフト610を受容シャフト620の内部で移動させ、それによってスロット614及び622(の一部)を互いに一直線に移動させることによって実現させることができる。スロット614の1つの部位が、たとえば引張ばね、プラスチック、又はゴムなど要素810によって、スロット622の対向部位に連結される。非圧縮状態から圧縮状態に変化するとき、要素810内に力が蓄積される。次いでこの力は、本体110に加えられた圧縮力を使用者が解放するとき、本体を非圧縮状態へと戻すために使用される。本発明に関する平均的な当業者が理解するように、体積回復機構はまた、本体110の外部にあってもよく、又は本体110に内在させることもできる(たとえば回復力を、可動接合部150の内在的な特性として有することができる)。別の代替形態は、圧縮されたとき力を蓄積する、本体110内の板ばね機構、又は、本体110の内部に配置されるが2つのシャフトに一体化されない引っ張りばね/機構である。体積回復機構は、サイズ(体積)調整装置に関して議論されたのと同様の技術を用いて調整することができ、又は、1つの設定のままとすることができる。
【0035】
一代替実施形態では、装置は、(i)体積を圧縮状態から非圧縮状態へと回復させ、かつ/又は(ii)体積を非圧縮状態から圧縮状態へと圧縮するための、時間を設定及び制御するための換気回数調整装置を備える。上記で議論されたような体積回復機構は、換気回数調整装置/制御装置として使用することができる。ただし、このようにする場合、換気回数制御装置は、依然使用者の手の中にあり、装置によって拘束されない。換気回数の制御は、1回換気の速度の一貫性を強化するために望ましい。したがって、別の実施形態では、換気回数調整装置は、サイズ調整装置と同様のやり方で追加される。
【0036】
換気回数制御ノブは、要素660の反対側の部位に配置することができ、たとえば、主シャフトの緩和を設定するために主シャフトと組み合わされるラックピニオン機構、回転的に抵抗する歯車と結合されるラックピニオン機構、ポリマーの逃がし機構、摩擦ブレーキ、回転的に抵抗するラチェットホイール、又は主シャフトの移動を偏位させるためのトラックなどによって、換気回数を調整するために実装することができる。機械及び構成工学の分野で知られたそのような機構はすべて、主シャフトの移動の緩和を変化させるために、換気回数制御ノブによって調整することができ、緩和の増大によって、換気回数の低下がもたらされる。サイズ調整装置機構と同様に、換気回数調整装置もまた、本体の内部又は本体の外部にあり、あるいは本体に内在させることができる。
【0037】
図9は、換気回数制御ノブ920上に配置されたラチェット機構910によって実現される、換気回数制御機構900の一実施形態の一例を示す。換気回数制御ノブ920は、同一のノブから、体積制御ノブ610へと上方に延びることができ、裏返しにされ、要素660の底部に組み付けられる。ラチェットホイール930は、たとえばスナップ嵌め、締結具、又は別の手段などによって、換気回数制御ノブ920へと組み付けることができる。換気回数制御ノブ920は、主ロッドの移動と一致して、又はその移動とは別に、ラチェットホイール930と共に回転させることができる。ラチェットホイールの回転は、たとえば摩擦挿入物、ロールピン、コイル又は腕時計用ばね、高耐摩耗性ディスクなど、多数の方法によって緩和させることができる。換気回数制御ノブ920の回転方向に応じて、主ロッド610への抵抗を調整するために、様々なラチェットホイールが、換気回数制御ノブ920の周囲に沿って存在することができる。
【0038】
サイズ、主シャフトの移動、又は換気回数の調整の視覚的なフィードバック(色、印、記号など)を使用者に提供するために、視覚的なフィードバック機構を追加することができる。図10は、サイズ(体積)の調整のための、視覚的なフィードバック機構の一例を示す。主シャフト610は、たとえば最小min、平均avg、及び最大maxの、送達可能な1回換気量を指示するように構成された、定規1010を横断して移動することができる。印1012に対する、主シャフト610の狭い端部612の相対的な位置は、所望の体積の微調節をさらに助ける。視覚的なフィードバック機構は、本体の内側に配置することができ、本体は、使用者が視覚的なフィードバック機構を見ることを可能にする、透明な部分を有する。同様のフィードバック機構を、換気回数用にも適用することができる。
【0039】
圧縮の速さ、換気回数、1回換気量、サイズ(体積)調整装置の設定、又は換気回数制御調整装置の設定のフィードバックを提供する、聴覚的なフィードバック機構(警報、タイマー、命令、警告など)を、さらに追加することができる。別の例は、(1つ又は複数の)シャフト及び/又は体積の変化に関連する、クリック止め(click)機構を有する。クリック音はまた、たとえばクリックを手で感じることができるなど、触覚的なフィードバックとして使用することもできる。
【0040】
さらに別の実施形態では、図11に示すようなパネル140Bなど、1つ又は複数のパネル上に、触覚フィードバック領域1130を追加することができる。1110は平面図であり、1120は側面図である。触覚フィードバック領域1130は、手の親指、又は手の1本又は複数本の指(すなわちパネル140B'上の)に適合するように、サイズ決め及び位置決めされる。これらの領域は、親指又は指の圧力、ならびに、たとえば本体内の空気/酸素からの圧力に応答する、可撓性材料製である。これは使用者に、圧縮力及び肺の抵抗のさらなるフィードバックを提供する。剛性パネル140Bに対する、可撓性材料1130の撓み1132は、圧縮中にたとえば指によって生じた撓みを示す。
【0041】
図12は、多数の装置100を互いに積み重ね又は重ね合わせた一例を示す。積重ね又は重ね合わせは、たとえば救急車内など空間が制限されている場合、及び多数の装置が必要とされることがある場合などに有利となる。1つの例では、投入機構、本体、及び/又は排出機構の構成及びジオメトリによって、それらを互いに重ね合わせることが可能になる。たとえば、排出機構の頂部は、別の排出機構の底部内へと重ね合わせることができる(投入機構についても同様の重ね合わせを確立することができる)。装置を互いに嵌め合わせること以外に、装置はまた、側部から側部への運動を防止する、たとえばリブ、凹み、Velcro(登録商標)、スナップ機構などの特徴を有することもできる。
【0042】
本発明及びその利点を詳細に説明してきたが、本発明は、本明細書で示し又は議論したことによって限定又は規定されないことが、理解されるべきである。本明細書の図面、説明、議論は、本発明の例を示し、本発明の使用例を提供する。本発明の原理、精神、又は法的範囲から逸脱することなく、本発明の実装形態を製作することができることを、当業者は理解するであろう。したがって、本発明の範囲は、添付の特許請求の範囲及びその法的同等物によってのみ決定されるべきである。
【符号の説明】
【0043】
100 蘇生装置
110 本体
120 投入機構
132 コネクタ
130 排出機構
140A,140B,140C,140D,140E,140F,140G,140H,140A',140B',140C',140D',140E',140F',140G',140H',140D'',140E'',140F'',140G'',140H'',140D''',140E''',140G''',140H''' パネル
150 可動部品
160 調整ノブ
162 調整ダイアル
H 高さ
W 幅
L 長さ
502 親指
504 指
506 水かき
610 主シャフト
612 端部
614 スロット
620 受容シャフト
622 スロット
630 開口
640 フラッター弁
660 要素
650 開口
670又は680 弁
710,712,714,716,718 スロット
720 回転軸
810 要素
900 換気回数制御機構
910 ラチェット機構
920 換気回数制御ノブ
930 ラチェットホイール
1010 定規
1012 印
1130 触覚フィードバック領域
1132 撓み
【特許請求の範囲】
【請求項1】
投入機構(120)及び排出機構(130)を有する封止された体積を取り囲む、剛性パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')を有する本体(110)を備え、
前記剛性パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')を互いに対して動かすことができ、
前記本体(110)が、非圧縮状態及び圧縮状態を有し、
前記本体(110)が、手の移動の方向、及び前記手の移動とは別の少なくとも1つの別の方向の移動を有し、
前記少なくとも1つの別方向の移動は、前記移動及び前記パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')の寸法及び相対角度の関数であり、少なくとも2つの前記パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')が、互いに略直交する軸線の周りで回転可能であることを特徴とする用手呼吸装置である蘇生装置(100)。
【請求項2】
前記状態間での前記本体の1つ又は複数の移動の変化を調整するための、サイズ調整装置をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項3】
前記サイズ調整装置が前記本体(110)の内部にあることを特徴とする請求項2に記載の装置(100)。
【請求項4】
前記サイズ調整装置が、前記本体の前記1つ又は複数の移動変化を最大170mmまで調整することを特徴とする請求項2に記載の装置(100)。
【請求項5】
前記状態間での前記体積変化を調整するための体積調整装置をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項6】
前記体積調整装置が前記本体(110)の内部にあることを特徴とする請求項5に記載の装置(100)。
【請求項7】
前記体積を前記圧縮状態から前記非圧縮状態へと回復させるための体積回復機構をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項8】
前記体積回復機構が前記本体(110)の内部にあることを特徴とする請求項7に記載の装置(100)。
【請求項9】
前記体積を前記圧縮状態から前記非圧縮状態へと回復させる時間を調整し、又は前記体積を前記非圧縮状態から前記圧縮状態へと圧縮する時間を調整するための換気回数調整装置(900)をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項10】
前記換気回数調整装置(900)が前記本体(110)の内部にあることを特徴とする請求項9に記載の装置(100)。
【請求項11】
前記各パネルの前記本体移動のいずれかが最大85mmであることを特徴とする請求項1に記載の装置(100)。
【請求項12】
前記状態間の前記体積の前記変化が1cc〜1400ccの範囲であることを特徴とする請求項1に記載の装置(100)。
【請求項13】
前記状態間の前記1つ又は複数の前記本体移動が、前記手の親指、前記手の1本又は複数本の指と、前記手の水かきとの間にぴったりと嵌っていることを特徴とする請求項1に記載の装置(100)。
【請求項14】
前記状態間の前記1つ又は複数の前記本体移動が、前記手の把持運動の本来の範囲によって規定されることを特徴とする請求項1に記載の装置(100)。
【請求項15】
前記1つ又は複数の剛性パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')上に、触覚フィードバック領域(1130)をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項16】
前記触覚フィードバック領域(1130)が、可撓性領域であり、かつ前記手の親指、あるいは前記手の1つ以上の指に適合するようにサイズ決め及び位置決めされていることを特徴とする請求項15に記載の装置(100)。
【請求項17】
視覚フィードバック機構をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項18】
前記本体(110)が透明であることを特徴とする請求項1に記載の装置(100)。
【請求項19】
聴覚フィードバック機構をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項20】
前記装置を積み重ねるための積重ね又は重ね合わせ機能をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項1】
投入機構(120)及び排出機構(130)を有する封止された体積を取り囲む、剛性パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')を有する本体(110)を備え、
前記剛性パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')を互いに対して動かすことができ、
前記本体(110)が、非圧縮状態及び圧縮状態を有し、
前記本体(110)が、手の移動の方向、及び前記手の移動とは別の少なくとも1つの別の方向の移動を有し、
前記少なくとも1つの別方向の移動は、前記移動及び前記パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')の寸法及び相対角度の関数であり、少なくとも2つの前記パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')が、互いに略直交する軸線の周りで回転可能であることを特徴とする用手呼吸装置である蘇生装置(100)。
【請求項2】
前記状態間での前記本体の1つ又は複数の移動の変化を調整するための、サイズ調整装置をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項3】
前記サイズ調整装置が前記本体(110)の内部にあることを特徴とする請求項2に記載の装置(100)。
【請求項4】
前記サイズ調整装置が、前記本体の前記1つ又は複数の移動変化を最大170mmまで調整することを特徴とする請求項2に記載の装置(100)。
【請求項5】
前記状態間での前記体積変化を調整するための体積調整装置をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項6】
前記体積調整装置が前記本体(110)の内部にあることを特徴とする請求項5に記載の装置(100)。
【請求項7】
前記体積を前記圧縮状態から前記非圧縮状態へと回復させるための体積回復機構をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項8】
前記体積回復機構が前記本体(110)の内部にあることを特徴とする請求項7に記載の装置(100)。
【請求項9】
前記体積を前記圧縮状態から前記非圧縮状態へと回復させる時間を調整し、又は前記体積を前記非圧縮状態から前記圧縮状態へと圧縮する時間を調整するための換気回数調整装置(900)をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項10】
前記換気回数調整装置(900)が前記本体(110)の内部にあることを特徴とする請求項9に記載の装置(100)。
【請求項11】
前記各パネルの前記本体移動のいずれかが最大85mmであることを特徴とする請求項1に記載の装置(100)。
【請求項12】
前記状態間の前記体積の前記変化が1cc〜1400ccの範囲であることを特徴とする請求項1に記載の装置(100)。
【請求項13】
前記状態間の前記1つ又は複数の前記本体移動が、前記手の親指、前記手の1本又は複数本の指と、前記手の水かきとの間にぴったりと嵌っていることを特徴とする請求項1に記載の装置(100)。
【請求項14】
前記状態間の前記1つ又は複数の前記本体移動が、前記手の把持運動の本来の範囲によって規定されることを特徴とする請求項1に記載の装置(100)。
【請求項15】
前記1つ又は複数の剛性パネル(140A,140A',140B,140B',140C,140D,140D',140D'',140D''',140E,140E',140E'',140E''',140F,140F',140F'',140F''',140G,140G',140G'',140G''',140H,140H',140H'',140H''')上に、触覚フィードバック領域(1130)をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項16】
前記触覚フィードバック領域(1130)が、可撓性領域であり、かつ前記手の親指、あるいは前記手の1つ以上の指に適合するようにサイズ決め及び位置決めされていることを特徴とする請求項15に記載の装置(100)。
【請求項17】
視覚フィードバック機構をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項18】
前記本体(110)が透明であることを特徴とする請求項1に記載の装置(100)。
【請求項19】
聴覚フィードバック機構をさらに備えることを特徴とする請求項1に記載の装置(100)。
【請求項20】
前記装置を積み重ねるための積重ね又は重ね合わせ機能をさらに備えることを特徴とする請求項1に記載の装置(100)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図11】
【公開番号】特開2013−39422(P2013−39422A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2012−236714(P2012−236714)
【出願日】平成24年10月26日(2012.10.26)
【分割の表示】特願2008−515843(P2008−515843)の分割
【原出願日】平成18年6月5日(2006.6.5)
【出願人】(507399575)アーティヴェント・コーポレーション (2)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成24年10月26日(2012.10.26)
【分割の表示】特願2008−515843(P2008−515843)の分割
【原出願日】平成18年6月5日(2006.6.5)
【出願人】(507399575)アーティヴェント・コーポレーション (2)
[ Back to top ]