
画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法
【課題】画像間対応パラメータを少ない計算量で安定且つ高速に高精度に同時推定できるようにした、画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法を提供する。
【解決手段】離散的な位置で得られた画像間のN次元類似度値がある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められたサブサンプリング位置を最も近似するN次元超平面を求めるステップと、N次元超平面を各パラメータ軸に対してN個求めるステップと、N個のN次元超平面の交点を求めるステップと、求められた交点をN次元類似度空間におけるN次元類似度の最大値または最小値を与える画像間対応パラメータのサブサンプリンググリッド推定位置とするステップとを有する。
【解決手段】離散的な位置で得られた画像間のN次元類似度値がある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められたサブサンプリング位置を最も近似するN次元超平面を求めるステップと、N次元超平面を各パラメータ軸に対してN個求めるステップと、N個のN次元超平面の交点を求めるステップと、求められた交点をN次元類似度空間におけるN次元類似度の最大値または最小値を与える画像間対応パラメータのサブサンプリンググリッド推定位置とするステップとを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば画像による位置計測、リモートセンシング、航空写真を利用した地図作製、ステレオビジョン、画像張り合わせ(モザイキング)、動画像位置合わせ、3次元モデリングなど多数の画像処理分野で使用できる、領域ベースマッチングを用いた推定方法に関し、特に、画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法に関するものである。
【背景技術】
【0002】
ステレオ画像処理をはじめとして、トラッキング、画像計測、リモートセンシング、画像レジストレーションなどの多くの画像処理分野では、画像間変位を得るために、領域ベースマッチングが基本的な処理として採用されている。
【0003】
領域ベースマッチングは、注目領域のサイズや形状を任意に設定できること、注目画素に対して注目領域をオフセットできること、計算が直感的で直接的な実装が可能であることなどが特徴である。領域ベースマッチングで画像間の変位をサブピクセルで求めるときには、画素単位で離散的に得られる類似度評価値を利用してサブピクセル変位を推定する方法が一般的に利用されている。
【0004】
画像間の対応を求めるためには、類似度と呼ぶ評価値を利用する。類似度とは、画像間の相対的な位置関係を入力、その位置関係のときの画像間の類似度を出力とする関数である。類似度は、画素単位の離散的な位置で値が決まるので、類似度だけをもとに画像間の対応位置関係を求めると、画素単位の分解能に制限される。そこで、類似度値をもとに補間することによって、サブピクセル分解能の画像間の対応を求める。
【0005】
従来、位置分解能を拡大するために、類似度評価値をフィッティング内挿することでサブピクセル推定を行うことが多い。しかし、画像の平行移動量をサブピクセル分解能で求める際に、画像の水平方向と垂直方向を独立にフィッティング内挿していたため、十分な精度が得られなかったという問題点があった。
【0006】
要するに、従来、デジタル画像を使った領域ベースのマッチングでは、変位の推定分解能を向上させるために、画像の水平/垂直方向について独立に類似度評価値を使ったサブピクセル推定を行っていた。
【0007】
また、従来、濃度こう配法を利用して画像間の変位を求めると、はじめからサブピクセル変位量を得ることができる。濃度こう配法では、水平方向と垂直方向を合わせて扱っている。ただし、画像間変位が1画素以上のときには画像を縮小する必要がある。通常は、画像スケールの変更と同時に実装する。濃度こう配法の実装は繰り返し計算になるので、計算時間の見積もりや、ハードウェアへの実装が困難であるという欠点があった。
【0008】
さらに、画像をDFTしてから複素共役積をもとめて逆DFTする従来手法では、注目領域のサイズが2nでなければならず、各種テクニックが必要である。流体計測分野では多く用いられ、計算量を小さくできることが特徴である。しかし、ビジョン分野では、ほとんど利用されない。しかも、計測対象が平面であるという仮定を用いているので、凹凸がある計測対象には適用が困難であるという欠点があった。
【0009】
従来は、以下のように詳細に説明されるように、画像の水平方向と垂直方向を独立に補間推定していた。しかし、従来のこのような方法によると、図1に示すように、推定誤差が発生するという問題点があった。
【0010】
ここでは、画像を水平方向と垂直方向に独立と考え、変位のサブピクセル推定も独立に行う従来方法を「1次元推定方法」と称する。
【0011】
従来の1次元推定方法の問題点を説明するために、まず、画像間の水平方向変位を求める問題を考える。真の画像間変位を(ds,dt)、異方性を持った類似度の回転角度をθgとする。1次元推定方法では、離散化類似度として、R(−1,0)、R(0,0)、R(1,0)(図1の□)を使い、下記数1によって

を推定した。なお、図1は、従来の1次元サブピクセル推定方法を説明するための図である。図中の
は、s=−1,0,1での3つの類似度の値を用いた従来の1次元サブピクセル推定方法によって推定された位置で、dt≠0及びθg≠0の際に、この推定値は真のピーク位置に対して誤差を有する。
【数1】
【0012】
仮に上記数1で直線t=0上の類似度最大位置を正しく推定できたとしても、図1から明らかなように、真の水平方向画像間変位ds(図1の▲の水平成分)に対して大きな推定誤差を含んでいる。すなわち、次の条件の全てが真のときには、水平方向推定誤差が発生して、
となる。
・垂直方向変位dt≠0。
・2次元類似度が異方性を持つ。
・異方性を持つ2次元類似度の回転角度θg≠0。
大部分の画像が上記条件に当てはまる。
【0013】
また、垂直方向に関しても同様である。例えば、図2(a)に示す画像中のコーナー領域のSSD自己類似度を求めると、図2(b)のようになっている。この自己類似度は異方性を持ち、θg≠0なので、従来の1次元推定方法では、サブピクセル推定誤差が発生する可能性があることを示している。また、図3(a)に示すテクスチャ画像を使ったサブピクセル推定においても、推定誤差が発生する可能性を示している。
【0014】
また、コンピュータビジョンの分野によっては、エピポーラ拘束などの拘束条件を利用することで探索範囲を1次元に限定できるので、1次元信号の高精度なマッチングができれば十分な場合がある。しかしながら、2次元画像を使って、高精度な2次元変位を求める必要がある用途も多い。例えば、動き推定、動き推定による領域分割、ターゲットトラッキング、モザイキング、リモートセンシング、超解像などである。
【0015】
画像の領域ベースマッチングにおいて、画像間変位が平行移動だけで表現できるときには、従来から多くの手法が提案され、実際に用いられてきた。たとえば、代表的な手法として、領域ベースマッチングと類似度補間手法を組み合わせた、サブピクセル推定手法は、次のようにして画像間のサブピクセル変位を推定する。
【0016】
対応位置を求める画像を、f(i,j)とg(i,j)としたとき、整数単位の変位(tx,ty)に対する画像間のSADを、次のように計算する。
【数2】
ただし、SADは輝度差の絶対値の和(Sum of Absolute Differences)を表し、Wは対応を求める注目領域を表す。SADは、画像が完全に一致したときに0になり、不一致が増えるに従って大きな値をとる。SADは類似していない評価値を表すので、非類似度である。
【0017】
SADの代わりに、次のSSDを用いることも多い。
【数3】
ただし、SSDは輝度差の絶対値の2乗和(Sum of Squared Differences)を表す。SSDも画像が完全に一致したときに0になり、不一致が増えるに従って大きな値をとる。SSDも類似していない評価値を表すので、非類似度である。
【0018】
SADやSSDの代わりに、次の相関係数(ZNCC:Zero-mean Normalized Cross-Correlation)を用いることもある。ZNCCは、注目領域内の画素濃度を統計データと見なし、注目領域間の統計的な相関値を計算している。
【数4】
ただし、
は、それぞれの領域内の濃度平均である。RZNCCは−1から1までの値をとり、画像が完全に一致したときに1になり、不一致が増えるに従って小さな値をとる。ZNCCの特徴は、画像間に濃度やコントラストの変化があってもほとんど同じ類似度が得られることである。
【0019】
ZNCCは類似性の評価値を表すので類似度とよばれるが、SADやSSDは非類似度を表す。ここでは、説明を簡単にするために、以後はSADやSSD、ZNCCを「類似度」と統一して表記する。
【0020】
類似度が最小値(SADやSSDのとき)または最大値(ZNCCのとき)になる整数単位の変位
を探索することで、画像間の整数単位変位を得ることができる。整数単位の変位を得た後で、次のようにサブピクセル変位を推定する。
【数5】
上記数5を用いて、最終的に得る画像間サブピクセル変位は、
となる。
【0021】
このような従来手法では、画像間に回転やスケール変化があるときに正しい対応を得ることができない問題があった。画像間の回転角度がわずかでも、2つの画像が異なるものと判断され、対応位置が見つからないことや、誤った位置に対応を検出する問題があった。
【0022】
一方、画像間の対応が平行移動だけでは表現できない場合、つまり、画像間に回転やスケール変化があるときには、回転やスケール変化も同時に推定する必要がある。従来、このときには、補間処理を用いて片方の画像(テンプレート画像)を平行移動と回転やスケール変化をさせてからマッチングを行い、類似度を計算しながら各パラメータを変化させ、類似度が最小値または最大値になるパラメータを探索する必要があった。次に、このパラメータ探索法を説明する。
【0023】
f(i,j)をテンプレート画像、g(i,j)を入力画像とするとき、平行移動(tx,ty)および回転角度θとスケール変化sをパラメータとする類似度RSSDを次のように計算する。
【数6】
ただし、
は、平行移動(tx,ty)および回転角度θとスケール変化sを与えたときの、位置(i,j)における画像g(i,j)の補間画像を表す。補間画像を作るときには、双線形補間(Bi-Linear補間)や双3次補間(Bi-Cubic補間)などを利用する。また、SSDではなく、SADやZNCCを利用してもよい。
【0024】
何らかの方法で初期パラメータ(tx,ty,θ,s)<0>を求めてRSSD(tx,ty,θ,s)<0>を計算し、より小さなRSSDを与える更新パラメータ(tx,ty,θ,s)<1>を探索する。パラメータを更新しても結果に変化がなくなるまで、更新を続ける。このとき、Newton-Raphson法やSteepest (Gradent) Descent法(最急降下法)、Levenberg-Marquadt 法など数値的解法を用いる。
【0025】
初期パラメータ(tx,ty,θ,s)<0>は、たとえば、画像間の対応が平行移動だけで表現できると仮定して通常の領域ベースマッチングによって推定した
を用いた
などを利用する。
【非特許文献1】清水雅夫・奥富正敏,「画像のマッチングにおける高精度なサブピクセル推定手法」,電子情報通信学会論文誌D-II,2001年7月,第J84-D-II巻,第7号,p.1409-1418
【非特許文献2】清水雅夫・奥富正敏,「画像のマッチングにおける高精度なサブピクセル推定の意味と性質」,電子情報通信学会論文誌D-II,2002年12月,第J85-D-II巻,第12号,p.1791-1800
【非特許文献3】マサオ・シミズ、マサトシ・オクトミ(Masao Shimizu and Masatoshi Okutomi),「プリサイス サブピクセル エスティメイション オン エリアベイセド マッチング(Precise Sub-Pixel Estimation on Area-Based Matching)」,プロク. 8th IEEE インターナショナル コンファレンス オン コンピュータ ビジョン (ICCV2001)(Proc. 8th IEEE International Conference on Computer Vision (ICCV2001)),(カナダ,バンクーバー),2001年7月,p.90-97
【非特許文献4】マサオ・シミズ、マサトシ・オクトミ(Masao Shimizu and Masatoshi Okutomi),「アン アナリシス オフ サブピクセル エスティメイション エラー オン エリアベイセド イメージ マッチング(An Analysis of Sub-Pixel Estimation Error on Area-Based Image Matching)」,プロク. 14th インターナショナル コンファレンス オン デジタル シグナル プロセシング(DSP2002)(Proc. 14th International Conference on Digital Signal Processing (DSP2002)),(ギリシア,サントリーニ),2002年7月,第II巻,p.1239-1242(W3B.4)
【非特許文献5】C.・クエンティン・デイビス、ゾハー・Z.・カル、デニス・M.・フリーマン(C. Quentin Davis, Zoher Z. Karu and Dennis M. Freeman),「イクイバレンス オフ サブピクセル モーション エスティメイタス ベイセド オン オプティカル フロー アンド ブロック マッチング(Equivalence of subpixel motion estimators based on optical flow and block matching)」,IEEE インターナショナル シンポジウム フォー コンピュータ ビジョン1995(IEEE International Symposium for Computer Vision 1995),(米国フロリダ州),1995年11月,p.7-12
【非特許文献6】サムソン・J.・ティモネー、デニス・M.・フリーマン(Samson J. Timoner and Dennis M. Freeman),「マルチイメージ グラジエントベイセド アルゴリズム フォー モーション エスティメイション(Multi-image gradient-based algorithms for motion estimation)」,オプティカル エンジニアリング(Optical Engineering),(米国),2001年9月,第40巻,第9号,p.2003-2016
【非特許文献7】ジョナサン・W.・ブラント (Jonathan W. Brandt),「インプルーブド アキュラシ イン グラジエントベイセド オプティカル フロー エスティメイション(Improved Accuracy in gradient-based Optical Flow Estimation)」,インターナショナル ジャーナル オフ コンピュータ ビジョン(International Journal of Computer Vision),(米国),1997年,第25巻,第1号,p.5-22
【非特許文献8】Q.・テン、M.・N.・ヒューニッス(Q. Tian and M. N. Huhns),「アルゴリズム フォー サブピクセル レジストレーション(Algorithms for Subpixel Registration)」,コンピュータ ビジョン,グラフィックス アンド イメージ プロセシング(Computer Vision, Graphics and Image Processing),(米国),1986年,第35号,p.220-233
【非特許文献9】ショーン・ボーマン、 マーク・A.・ロバートソン、ロバート・L.・スティブンソン(Sean Borman, Mark A. Robertson and Robert L. Stevenson),「ブロックマッチング サブピクセル モーション エスティメイション フロム ノイジー,アンダー―サンプルド フレームス---アン エンパイリカル パフォーマンス エバリュエーション(Block-Matching Sub-Pixel Motion Estimation from Noisy, Under-Sampled Frames---An Empirical Performance Evaluation)」,SPIE ビジュアル コミューニケイションズ アンド イメージ プロセシング 1999(SPIE Visual Communications and Image Processing 1999),(米国カリフォルニア州)
【発明の開示】
【発明が解決しようとする課題】
【0026】
このような多パラメータ最適化では、初期値が適切でないと正しい結果が得られない問題がある。また、画像パターンやノイズ、撮影レンズの光学歪みなどの影響で解が得られない問題もある。さらに、繰り返し計算を利用するので、計算時間を見積もることができないといった難点がある。このため、アルゴリズムを実装する上で、完成したシステムの総合応答時間を正確に見積もることができず、ハードウェア化することがきわめて困難であった。また、計算時間の面では、繰り返し計算の各段階で画像を補間する必要があるが、画像補間演算は演算量が多いため、多くの計算時間が必要になる。さらに、推定精度の面では、画像補間手法によって補間画像の性質が異なるので、採用する補間手法によって最終的なパラメータ推定精度や推定誤差の性質が異なる点も大きな問題であった。
【0027】
本発明は上述のような事情よりなされたものであり、本発明の目的は、N次元類似度を考慮することで、上記従来手法の問題点を解決し、画像間対応パラメータを少ない計算量で安定且つ高速に高精度に同時推定できるようにした、画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法を提供することにある。
【課題を解決するための手段】
【0028】
本発明は、画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法に関し、本発明の上記目的は、N(Nは4以上の整数である)個の画像間対応パラメータを軸とするN次元類似度空間において、離散的な位置で得られた画像間のN次元類似度値を利用して、前記N個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法であって、前記画像間のN次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似するN次元超平面を求めるステップと、前記N次元超平面を各パラメータ軸に対してN個求めるステップと、前記N個のN次元超平面の交点を求めるステップと、前記交点を前記N次元類似度空間におけるN次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップとを有するようにすることによって効果的に達成される。
【0029】
また、本発明は、画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法に関し、本発明の上記目的は、3個の画像間対応パラメータを軸とする3次元類似度空間において、離散的な位置で得られた画像間の3次元類似度値を利用して、前記3個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法であって、前記画像間の3次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する平面を求めるステップと、前記平面を各パラメータ軸に対して3個求めるステップと、前記3個の平面の交点を求めるステップと、前記交点を前記3次元類似度空間における3次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップとを有するようにすることによって効果的に達成される。
【0030】
更に、本発明は、画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法に関し、本発明の上記目的は、離散的に得られた画像間の2次元類似度値を利用して、連続領域における2次元類似度最大値または最小値の位置を高精度に推定する画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法であって、前記画像間の2次元類似度値が、水平軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(水平極値線HEL)を求めるステップと、前記画像間の2次元類似度値が、垂直軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(垂直極値線VEL)を求めるステップと、前記水平極値線HELと前記垂直極値線VELの交点を求めるステップと、前記交点を前記2次元類似度の最大値または最小値を与えるサブピクセル推定位置とするステップとを有するようにすることによって効果的に達成される。
【発明の効果】
【0031】
本発明によれば、画像間の平行移動、回転、スケール変化を同時に高精度に推定することができる。即ち、本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法によれば、画像間の対応に、平行移動があるときだけでなく、回転やスケール変化があるときにも、繰り返し計算を利用することなく、高精度にこれらの画像間対応パラメータを同時に推定することができる。本発明では、繰り返し計算を利用しないので、従来のように計算ごとに画像を補間する必要が全くない。
【0032】
また、本発明によれば、テンプレート画像を用いて少ない枚数の補間画像を作成しておき、これらの補間画像を用いた画像間の類似度値を利用して、平行移動と回転やスケール変化を同時に高精度に推定することができる。本発明は、一般的に利用されているようなパラメータ最適化手法と異なり、繰り返し計算を用いないため、計算が容易でしかも計算時間が予測可能で、繰り返し計算を行うときに問題となる収束性を保証する必要もなく、初期値による不安定性も生じない。つまり、本発明によれば、従来方法において生じる収束性の問題や初期値の問題を排除することができる。
【発明を実施するための最良の形態】
【0033】
以下、本発明の好適な実施例を図面及び数式を参照しながら説明する。
【0034】
実施例1:
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法の実施例1では、画像のサンプリング周期で求まっている2次元類似度を使って、その2次元類似度の最大値又は最小値を与える2次元サブピクセル変位(つまり、水平及び垂直方向の画像間変位)を高精度に同時に推定するようにしている。
【0035】
ここで、画像を水平方向と垂直方向に独立と考え、変位のサブピクセル推定も独立に行う従来方法を「1次元推定方法」と称するのに対して、本発明の実施例1に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法は、2次元画像から計算した離散位置における2次元類似度を使って、2次元サブピクセル推定を行なっているので、「画像のサブピクセルマッチングにおける高精度2次元推定方法」又は「2次元サブピクセル推定方法」と称し、更に、略して「2次元推定方法」と呼ぶようにしている。
【0036】
後述する本発明の実施例1に係る2次元推定方法は、領域ベースマッチングを用いた高精度同時推定方法で、従来の「1次元推定方法」と比較して計算量がわずかに増えるだけで、圧倒的に高精度な2次元サブピクセル推定が可能である。
【0037】
(1)2次元画像モデルと2次元類似度モデル
ここでは、何種類かの画像モデルをとりあげ、その2次元類似度を考える。異なる画像モデルから得られる2次元類似度が、同じ2次元類似度モデルで近似できることを示す。
【0038】
領域ベースマッチングとは、2枚の画像の類似度を評価し、その最大または最小位置を2枚の画像間の変位として求めることである。この類似度は、通常は画像のサンプリング周期と一致して、とびとびの変位位置に対して値が得られる。画素単位でのマッチングは、これらの類似度の中から、最大値または最小値を探すことに対応する。サブピクセル推定は、これらの類似度を補間して、サブピクセルでの最大値または最小値を与えるサブピクセル変位位置を推定することである。以後の説明では、「最大または最小」を単に「最大」と表現する。SADやSSD類似度を使うときには「最小」、相関類似度を使うときには「最大」を意味する。
【0039】
(1―1)コーナーモデル
まず、領域ベースマッチングとサブピクセル推定が可能な2次元画像モデルとして、1次元画像モデル
【数7】
を単純に拡張して、下記数8で示すコーナー画像を考える。ここで、σimageは濃度エッジのシャープさである。このコーナー画像を図4(a)に示す。
【数8】
ただし、画像座標系をu−v、類似度座標系(変位座標系)をs−tとする。
【0040】
上記数8で表す画像を参照画像として、また、全く同じ画像を入力画像として2次元マッチングを行ったときのSSD類似度(本発明では、SSD類似度を「自己類似度」と称することもある)は、下記数9で求めることができる。SSD類似度は、値が小さいほど類似していることを示すので、この場合には暗い場所ほど類似性が高いことを示している。自己類似度は全く同じ画像を使った類似度なので、変位(s,t)=(0,0)の位置の類似度が最も小さい。この類似度を図4(b)に示す。
【数9】
ただし、総和範囲は、任意形状の注目範囲であるが、図4(b)では11×11の矩形領域で計算した。
【0041】
図4(a)では、コーナーに剪断成分が含まれない、つまり水平方向の濃度変化が垂直位置に依存しないので、2次元画像の水平方向と垂直方向を独立に扱うことができる。このとき、上記数9の類似度も、水平方向と垂直方向を独立に扱うことができる。従って、サブピクセル変位位置を推定するときにも、水平方向と垂直方向を独立に扱うことができる。
【0042】
しかし、実際の画像では、必ずしも90度のコーナーで構成されるわけではない。例えば、建築物を地上から撮影したステレオ画像を使って3次元情報を再構成するときには、建築物のコーナー領域を、他方の画像との対応を求めるが、コーナーが90度に撮影されることはまれである(図2(a)参照)。
【0043】
そこで、v=0に濃度エッジを持つ2枚の2次元画像
【数10】
を、それぞれ左にθa、右にθbだけ回転した画像を考える。
【数11】
【0044】
このθa、θbを画像全体の回転角度θgとコーナー角度θcを使って、次のように定義する。
【数12】
【0045】
このとき、Ia(u,v)とIb(u,v)を使って表す2次元画像モデルIc(u,v)を、下記数13で定義する。
【数13】
【0046】
この2次元画像モデルは、図5に示すように、画像全体の回転角度θgとコーナー角度θcと2次元濃度エッジのシャープさσimageをパラメータに持つ。0≦θg≦π/4、0<θc≦π/2の範囲を考慮する。これ以外の範囲は、画像の左右を反転することと、濃淡を反転することで表現することができる。θg=π/4、θc=π/2のときには、上記数8の単純な画像モデルと同一である。図6(a)、(b)、(c)、(g)、(h)、(i)に、上記数13で表す画像モデルの例を示す。図6(d)、(e)、(f)、(j)、(k)、(l)に、図6(a)、(b)、(c)、(g)、(h)、(i)の2次元画像に対応した類似度を示す。
【0047】
(1―2)繰り返しテクスチャモデル
類似度に方向依存性がないとき、つまり類似度が等方性なら、サブピクセル推定を水平方向と垂直方向に独立に行っても誤差が発生しない。しかし、類似度に方向依存性があるとき(本発明では「異方性」と呼ぶ)、つまり、方向によって微分値が異なるときには、サブピクセル推定を水平方向と垂直方向に独立に行うと誤差が発生する可能性がある。
上記数13で示した2次元画像モデルIc(u,v)では、θc≠π/2のときに自己類似度に異方性が現れた。しかし、直感的に理解できるように、これ以外にも自己類似度に異方性を生じさせるテクスチャが存在する。この例として、図3(a)に示す画像のSSD自己類似度を図3(b)に示す。テクスチャに含まれるコーナーはθc=π/2なのに、類似度に異方性が現れている。
【0048】
θc=π/2なのに自己類似度に異方性を生じさせる2次元画像モデルとして、下記数14を考える。
【数14】
【0049】
上記数14の2次元画像モデルIt(u,v)は、図7に示すように、u方向空間周波数fu、v方向空間周波数fv、画像の回転角度θgをパラメータに持つ。0≦θg≦π/2の範囲を考慮する。fu≠fvのときには、自己類似度に異方性を生じる。自己類似度の異方性は、テクスチャにおける空間周波数の異方性に相当する。前節で導入した2次元画像モデルIc(u,v)は、θc≠π/2のときに、空間周波数の異方性が発生していると考えることができる。
【0050】
この2次元画像モデルとSSD自己類似度を図8に示す。
【0051】
(1―3)ガウス関数モデル
自己類似度に異方性を生じさせる2次元画像モデルとして、下記数15の2次元ガウス関数を考えることができる。
【数15】
ただし、図9に示すように、σはガウス関数の標準偏差で、kは異方性係数(k>0)で、θgは回転角度である。0≦θg≦π/2の範囲を考慮する。この2次元画像モデルとSSD自己類似度を図10に示す。
【0052】
(1―4)2次元類似度モデル
1次元サブピクセル推定と異なり、2次元サブピクセル推定では2次元画像モデルのパラメータ数が多いので、2次元画像モデルから得られるSSD類似度を直接検討することは得策ではない。ここで取り上げた画像モデルは、画像の性質の多くを含んでいるが、実際用途で扱う画像は、ここで取り上げた画像モデルを複数組み合わせたものや、より高次の画像が存在する。
【0053】
そこで、以後の検討では、これまでに検討した何種類かの画像モデルを直接使わず、代わりに、これらの画像モデルから得られる2次元類似度を近似する2次元類似度モデルを検討する。2次元類似度モデルとして、下記数16で表す2次元ガウス関数を採用する。
【数16】
ただし、(ds,dt)は画像間の真の変位で、σはガウス関数の標準偏差で、kは異方性係数(k>0)で、θgは回転角度である。0≦θg≦π/2の範囲を考慮する。
【0054】
比較のため、ここで取り上げた2次元画像モデルから得られるSSD自己類似度の例と上記数16の類似度の例を図11に示す。ただし、(ds,dt)=(0,0)、θg=0、k=1としたときに、2次元画像モデルから計算した離散的な自己類似度を最もよく近似するように、上記数16のパラメータを数値計算で求めた。
【0055】
以上の説明は、連続領域で行ってきたが、実際の画像データから得られる類似度は、画素単位でのサンプリングになっている。この様子を図12に示す。本発明の実施例1に係る2次元推定方法は、このように離散化単位で得られた2次元類似度を用いて、連続領域での類似度最大値を与える2次元変位を高精度に推定するものである。
【0056】
(2)本発明の実施例1に係る2次元推定方法
(2―1)本発明の実施例1に係る2次元推定方法の原理<連続領域での説明>
ここでは、前述した2次元類似度モデルを使って、本発明の実施例1に係る2次元推定方法の原理を説明する。本発明は、離散化単位で得られた類似度値を使って、連続領域での類似度最大値位置を高精度に推定することを特徴としている。ここでは、本発明の実施例1の原理を連続領域で説明する。
【0057】
図13は2次元類似度モデルを等高線で表示した図である。この2次元類似度モデルのパラメータは、(ds,dt)=(0.2,0.4)、σ=1.0、k=0.7、θg=π/6である。等高線は、2次元類似度モデルの最大値に対して、10%から90%までレベルを示している。2次元類似度モデルの等高線は楕円になる。この楕円の中心が、2次元類似度モデルの最大値位置である。図13(a)には、2次元類似度モデルの長軸を示してあるが、この角度が回転角度θgに相当する。
【0058】
数16の2次元類似度モデルをsで偏微分して0とおくことで、図13(b)の直線s=at+bを表す関係を得ることができる。
【数17】
【0059】
考慮する条件がk>0なので、上記数17の各係数の分母≠0である。また、2次元類似度モデルが等方性のとき、つまりk=1のとき、上記数17はs=dsとなり、推定誤差が発生しない。本発明の実施例1では、この直線を水平極値線HEL(Horizontal Extremal Line)と称する。HELは図13(b)の等高線を表す楕円と水平直線との接点を通る。
【0060】
一方、数16の2次元類似度モデルをtで偏微分して0とおくことで、図13(b)の直線t=As+Bを表す関係を得ることができる。
【数18】
【0061】
数17と同様に、各係数の分母≠0である。また、k=1のとき、数18は、t=dtとなり、推定誤差が発生しない。本発明の実施例1では、この直線を垂直極値線VEL(Vertical Extremal Line)と称する。VELは図13(b)の等高線を表す楕円と垂直直線との接点を通る。
【0062】
HELとVELの交点は、数16の2次元類似度モデルを異なる方向に偏微分したときに、どちらの方向にも0になる点であり、これは2次元類似度モデルの類似度値を最大にする位置に他ならない。実際に、この交点を計算すると、
【数19】
となり、当然のことながら2次元類似度モデルの変位(ds,dt)を表している。
【0063】
このときの分母≠0は、HELとVELが交点を持つための条件である。分母を計算すると、次のようになる。
【数20】
kの範囲はk>0なので、この分母1−aA≠0である。
【0064】
まとめると、2次元類似度のs方向微分とt方向微分は、HELとVELの2直線で表すことができ、この2直線の交点が2次元類似度の最大値位置になっている。従って、本発明の実施例1では、離散化単位で得られた類似度値を使ってHELとVELを求め、その交点を計算すれば、2次元サブピクセル推定を行うことができる。
【0065】
(2―2)本発明の実施例1に係る2次元推定方法の実装方法<離散領域への適用>
以下では、離散的に算出された画像間の類似度値を利用して、連続領域における類似度最大値位置を推定する本発明の実施例1に係る2次元推定方法を具体的に説明する。
【0066】
まず、離散的に得られている類似度値を使って、HELを求める。HELは水平方向について類似度最大値を通る直線なので、2本以上の水平ライン上でのサブピクセル類似度最大値位置が決定すれば、HELを求めることができる。この様子を図14(a)に示す。同図において、同心楕円は2次元類似度モデルの等高線を表す。同図中の□位置で離散的に得られた類似度値を使って、直線で示すHELを求める。
【0067】
図14(a)において、直線t=0上での最大類似度を与える位置を
変位位置(s,t)での類似度をR(s,t)とすると、
【数21】
【0068】
この推定結果には、前章で示したように推定誤差が含まれるが、このことについては次節で述べる。直線t=−1上と直線t=1上での最大類似度を与える位置をそれぞれ
とすると、
【数22】
【数23】
ただし、it=−1、it=1は、直線t=−1上と直線t=1上で最大類似度を与える整数位置オフセットである(後述する)。
【0069】
これら3点の最大類似度位置を通る直線がHELである。実際には、画像パターンや画像に含まれるノイズや画像間の相違などのために、これら3点は完全には直線上には乗らない可能性があるので、最小二乗で近似直線を求める。この3点を最小二乗で近似する直線は、下記数24で求めることができる。
【数24】
【0070】
次に、離散化単位で得られた類似度値を使って、VELを求める。VELは垂直方向について類似度最大値を通る直線なので、2本以上の垂直ライン上でのサブピクセル類似度最大値位置が決定すれば、VELを求めることができる。この様子を、図14(b)に示す。同図において、同心楕円は、2次元類似度モデルの等高線を表す。同図中の□位置で離散化単位で得られた類似度値を使って、直線で示すVELを求める。
【0071】
図14(b)において、直線s=0上での最大類似度を与える位置を
とすると、
【数25】
【0072】
直線s=−1上と直線s=1上での最大類似度を与える位置をそれぞれ
とすると、
【数26】
【数27】
ただし、is=−1、is=1は、直線s=−1上と直線s=1上で最大類似度を与える整数位置オフセットである。
【0073】
これら3点の最大類似度位置を通る直線がVELである。この3点を最小二乗で近似する直線は、下記数28で求めることができる。
【数28】
【0074】
HELとVELの交点、即ち、数24と数28の交点が、連続領域における2次元類似度最大値のサブピクセル推定位置
になっている。
【数29】
【0075】
ところで、数26、数27における直線t=−1上と直線t=1上で最大類似度を与える整数位置オフセットit=−1、it=1は、必ずしも0になる保証はない。例えば、図15(b)に示すのは、(ds,dt)=(0.2,0.4)、σ=1、k=0.3、θg=π/8の2次元類似度モデルだが、このモデルに対するHELを求めるための、直線t=−1上の類似度最大値はs=−2付近にある。従って、
を計算するときには、直線t=−1上と直線t=1上で最大類似度を与える整数位置を再探索する必要がある。垂直方向についても同様で
を計算するときには、直線s=−1上と直線s=1上で最大類似度を与える整数位置を再探索する必要がある。
【0076】
このとき、図15(b)に示す±3の範囲の類似度を使い、−2≦i≦+2を考慮している。この探索範囲は、多数の現実的な画像をもとに決定した範囲である。もしも、2次元類似度モデルのパラメータ範囲に制限がないとすると、このときの再探索範囲は無限になってしまう。その理由は、(ds,dt)=(0,0)のとき、数17のHELについて、下記数30のD(k,θg)を考えると、
【数30】
【0077】
D(k,θg)が最大値に近づくのは、θg→0、k→0のときで、D(k,θg)→cosθg/sinθg→∞だからである。ところで、k→0のとき、2次元類似度の異方性が無限大になり、HELとVELがほとんど一致する。もしもこのような2次元類似度を作り出す画像があったとしても、そのときには、ほとんど同一になったHELとVEL上で類似度最大値を検索すればよい。たとえば、数30でD(k,θg)→∞のときには、VEL上の3点
における類似度値を求め、パラボラフィッティングを行えばよい。
【0078】
従来の1次元推定では、図15(a)に示す5個の類似度値を用いてサブピクセル位置を推定していた。このとき、直線t=0上の3点の類似度(□印)を用いてサブピクセル推定を行って水平方向サブピクセル変位(●印)とした。また、直線s=0上の3点の類似度(□印)を用いてサブピクセル推定を行って垂直方向サブピクセル変位(●印)とした。図15(a)に示す2直線の交点が従来手法で求めた2次元サブピクセル推定値だが、大きな推定誤差を含むことがわかる。
【0079】
これに対して本発明の実施例1に係る2次元推定方法は、図15(b)に示す25個の類似度値を用いて2次元サブピクセル位置を推定する。HELとVELの交点は、正確に2次元類似度のサブピクセル最大位置を通るので、推定は極めて高精度である。さらに、本発明の実施例1に係る2次元推定方法の計算量の増加は、従来の「1次元推定方法」と比較してわずかである。領域ベースマッチングでは、大部分の計算時間は類似度値を計算しているが、本発明の実施例1に係る2次元推定方法では既に得られている類似度値を利用するので、計算時間の増加は少ない。
【0080】
(2―3)本発明の実施例1に係る2次元推定方法とサブピクセル推定誤差低減方法との組合せ
数21から数23、数25から数27において、3位置の類似度を使ってパラボラフィッティングによってサブピクセル位置を推定するときには、推定誤差が発生する。この推定誤差は、補間画像を利用することでキャンセルすることができる。
【0081】
数21から数23、数25から数27において求めているサブピクセル位置は、従来どおりの1次元推定にすぎないので、非特許文献1に記載された、推定誤差を低減できるサブピクセル推定方法(以下、本発明の実施例1に係る2次元推定方法と区別するために、非特許文献1に記載されたサブピクセル推定方法を「サブピクセル推定誤差低減方法」と称する)をそのまま適用することができる。ここでは簡単に適用方法を説明する。
【0082】
マッチングに使う2次元画像関数をI1(u,v)、I2(u,v)とするとき、水平方向補間画像I1iu(u,v)は、
【数31】
と表すことができる。ただし、このときの(u,v)は整数である。水平方向補間画像I1iu(u,v)は、I1(u,v)に対して(0.5,0)だけ変位していると考えることができる。この補間画像を使って、次に示すSSD類似度でサブピクセル推定を行うと、推定結果も(0.5,0)だけ変位していると考えることができるので、その変位を補正した推定結果は、下記数32、数33で求めることができる。
【数32】
【数33】
【0083】
数33も数21と同様に推定誤差を含むが、その位相が逆になっているので、下記数34によって推定誤差をキャンセルすることができる。
【数34】
【0084】
同様にして、水平ラインt=−1、t=1について、
【数35】
【数36】
【0085】
ただし、it=−1、it=1は、直線t=−1上と直線t=1上でRiu(s,t)の最大類似度を与える整数位置オフセットである。これらの値は、数22、数23とは異なる可能性がある。数35と数36を使って、下記数37、数38によって推定誤差をキャンセルすることができる。
【数37】
【数38】
【0086】
垂直方向についても同様である。垂直方向補間画像I1iv(u,v)は、
【数39】
と表すことができる。ただし、このときの(u,v)は整数である。垂直方向補間画像I1iv(u,v)は、I1(u,v)に対して(0,0.5)だけ変位していると考えることができる。この補間画像を使って、次に示すSSD類似度でサブピクセル推定を行うと、推定結果も(0,0.5)だけ変位していると考えることができるので、その変位を補正した推定結果は、下記数40、数41で求めることができる。
【数40】
【数41】
【0087】
数41も数25と同様に推定誤差を含むが、その位相が逆になっているので、下記数42によって推定誤差をキャンセルすることができる。
【数42】
【0088】
同様にして、垂直ラインs=−1、s=1について、
【数43】
【数44】
【0089】
ただし、is=−1、is=1は、直線s=−1上と直線s=1上でRiv(s,t)の最大類似度を与える整数位置オフセットである。これらの値は、数26、数27とは異なる可能性がある。数43と数44を使って、下記数45、数46によって推定誤差をキャンセルすることができる。
【数45】
【数46】
【0090】
数34、数37、数38、数42、数45、数46で計算した各ライン上のサブピクセル推定値は、従来の1次元推定方法によって推定されたサブピクセル推定値と比較して、推定誤差が低減されている。従って、サブピクセル推定誤差低減方法によって推定されたこれらの推定結果を使って、更に本発明の実施例1に係る2次元推定方法で2次元サブピクセル推定を行うことで、より高精度な2次元サブピクセル推定が可能になる。
【数47】
補間画像は、水平方向と垂直方向にそれぞれ1回ずつ作ればよいので、計算量の増加は1次元推定と同程度である。
【0091】
(3)本発明の実施例1に係る2次元推定方法による推定誤差と従来の推定方法による推定誤差との比較
以下では、2次元画像間の変位推定で、従来一般的に使用されている各種推定方法による推定誤差を本発明の実施例1に係る2次元推定方法による推定誤差と比較する。前述した2次元画像を使用して推定誤差を比較することで、同じ画像に対する比較を行う。
【0092】
2次元サブピクセル推定誤差は、水平方向と垂直方向の推定誤差を考える必要がある。ところが、推定誤差に影響するのは、2次元画像が持つ3パラメータと画像間の2次元入力変位の合計5パラメータになるので、全てを網羅することは困難である。そこで、代表的な2次元画像を用いて、各方法による推定誤差を比較する。
【0093】
(3―1)本発明の実施例1に係る2次元推定方法
代表的な2次元画像として、前述したコーナー画像を使用し、パラメータとしてθg=0,π/8,π/4、θc=π/4、σimage=1.0を考える。0≦θg≦π/4以外の2次元画像は、画像の左右を反転することと、濃淡を反転することで表現することができるが、実際の検討は、さらに多くの2次元画像、回転角度、コーナー角度を用いて行っている。他の2次元画像でも、2次元類似度が同じような形になるときには、サブピクセル推定誤差は同じ傾向を示す。
【0094】
サブピクセル推定誤差低減方法を適用した本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortは、数47を使って、下記数48で表すことができる。
【数48】
【0095】
サブピクセル推定誤差低減方法を適用しないときの本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortは、数29を使って、下記数49で表すことができる。
【数49】
【0096】
θg=0,π/8,π/4の3画像に対する数48、数49の2次元サブピクセル推定誤差を、それぞれ図16、図17、図18の(c)(d)、(e)(f)に示す。(c)と(d)は、それぞれサブピクセル推定誤差低減方法を適用した本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortを示す。(e)と(f)は、それぞれサブピクセル推定誤差低減方法を適用しないときの本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0097】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じているにもかかわらず、サブピクセル推定誤差は極めて小さい。
【0098】
(3―2)従来の1次元サブピクセル推定方法
従来の1次元推定方法は、数21と数25で求めることができる。また、非特許文献1に記載されたサブピクセル推定誤差低減方法を適用した推定値は、数34と数42で求めることができる。ここでは、数21と数25を使ったときの推定誤差を比較検討する。
【数50】
【0099】
θg=0,π/8,π/4の3画像に対する上記数50のサブピクセル推定誤差を、それぞれ図16、図17、図18の(g)、(h)に示す。(g)と(h)は、それぞれ従来の1次元推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0100】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。このときには、従来の1次元推定方法でも推定誤差が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じるが、このときには大きな推定誤差が生じる。推定誤差の大きさは、異方性を持つ2次元類似度の回転角度と真の画像間変位に依存する。
【0101】
(3―3)従来の濃度こう配法によるサブピクセル推定
濃度こう配法では、画像間における対応位置に濃度変化がないことを仮定して、水平方向移動量と垂直方向移動量の2つの未知数を含む拘束条件を画素ごとに得る。したがって、この2つの未知数はこのままでは求めることができないため、注目領域を設定し、注目領域中での拘束条件の2乗和を最小にするように、繰り返し計算によって未知数を求める。このようにして得られる変位量には画素単位という制約がなく、サブピクセル単位を得ることができる。
【0102】
一方、画像補間手法では、注目領域と周囲の探索領域を離散化単位よりも密に補間する。密に補間した単位で、類似度最大値を探索する。このときには、濃度こう配法と異なり、画像間の移動量に対する制限はない。
【0103】
この2種類のサブピクセル変位推定方法は、全く異なる実装に見え、異なる手法として扱われていたが、本質的に同一のものであることが示されている(非特許文献5を参照)。ここでは、補間画像を作るときに用いる補間関数の次数によってサブピクセル変位推定誤差が変化する様子を確認する。そこで、1次補間を利用した補間画像によるサブピクセル推定結果を、濃度こう配法による結果と見なす。さらに、高次の補間関数を利用した補間画像によるサブピクセル推定結果も検討する。
【0104】
(3―4)従来のバイリニア画像補間によるサブピクセル推定
サブピクセル変位を求める2枚の画像をI1(u,v)、I2(u,v)とする。これらの画像は離散化サンプリングされているとする。すなわち、u,vは整数である。また、画像間の変位を(ds,dt)としたときに、0≦ds≦1、0≦dt≦1とする。画像間の真の変位がこの範囲にないときには、画素単位のマッチングによって画像全体を移動する。
【0105】
バイリニア補間(2方向1次補間)を利用したサブピクセル推定値
は、下記数51で表すことができる。
【数51】
ただし、総和範囲は任意形状の注目領域、argminは値を最小にするような
の組を求める演算を表す。
【0106】
θg=0,π/8,π/4の3画像に対する上記数51のサブピクセル推定誤差を、それぞれ図16、図17、図18の(i)、(j)に示す。(i)と(j)は、それぞれ水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0107】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。このときには、推定誤差が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じるが、このとき推定誤差が生じる。推定誤差の大きさは、異方性を持つ2次元類似度の回転角度と真の画像間変位に依存する。
【0108】
この推定誤差は、図16、図17、図18の(c)、(d)の結果よりも大きい。すなわち、本発明の実施例1に係る2次元推定方法は、従来のバイリニア補間によるサブピクセル推定方法よりも高精度に変位を推定することができる。バイリニア補間によるサブピクセル推定方法は濃度こう配法と等価なので、本発明の実施例1に係る2次元推定方法は、従来の濃度こう配法よりも高精度にサブピクセル変位を推定することができるとも言える。
【0109】
また、濃度こう配法に相当する推定誤差は、図16、図17、図18の(g)、(h)の1次元推定方法の結果よりもはるかに小さい。すなわち、従来広く利用されてきた、領域ベースマッチングを画素単位で行い、サブピクセル変位は類似度を利用して1次元推定する手法より、濃度こう配法ははるかに高精度に2次元サブピクセル変位を推定することができる。このため、領域ベースマッチングよりも濃度こう配法の方が高精度という認識があったが、本発明の実施例1に係る2次元推定方法を用いることで、濃度こう配法よりもさらに高精度にサブピクセル変位を推定することができる。
【0110】
(3―5)従来のバイキュービック画像補間によるサブピクセル推定
補間画像を作るときに、より高次の項まで考慮することで、高精度な補間画像を作ることができる。バイキュービック補間(2方向3次補間)は、補間したいサブピクセル画素位置の周囲4×4の画素値を使う補間方法である。バイキュービック補間を利用したサブピクセル推定値
は、下記数52で表すことができる。
【0111】
【数52】
ただし、総和範囲は任意形状の注目領域、argminは値を最小にするような
の組を求める演算を表す。このとき、重み関数h(x)は、sinc関数をもとに各種提案されていて、下記数53が多く用いられている。
【0112】
【数53】
ただし、aは調整パラメータで、a=−1やa=−0.5がよく用いられる。
【0113】
また、下記数54も多く用いられる。
【数54】
B、Cは調整パラメータで、B=1、C=0のときにはキュービックBスプラインを近似し、B=0、C=0.5のときにはCatmull−Romキュービック特性になる。このように、重み係数の選び方によって補間特性が異なる。ここでは、数53の重み関数において、パラメータa=−0.55を採用した。ただし、画像処理の教科書等に最も多く紹介されているのはa=−1である。両者の特性の差については後述するが、a=−0.55はサブピクセル推定誤差を小さくするように数値的に決定した。
【0114】
θg=0,π/8,π/4の3画像に対する数52のサブピクセル推定誤差を、それぞれ図16、図17、図18の(k)、(l)に示す。(k)と(l)は、それぞれ水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0115】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。このときには、推定誤差が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じるが、このとき推定誤差が生じる。推定誤差の大きさは、異方性を持つ2次元類似度の回転角度と真の画像間変位に依存する。
【0116】
この推定誤差は、図16、図17、図18の2次元推定(c)、(d)の結果と同程度である。すなわち、本発明の実施例1に係る2次元サブピクセル推定方法は、最適なパラメータを選択したときの高次補間画像を使ったサブピクセル推定と同程度の高精度であるということができる。
【0117】
ところで、数53におけるパラメータaについて、具体的な計算例を示して説明する。数53は、sinc関数を有限範囲で近似した重み係数と考えることができる。パラメータaは、その近似特性を調節するものである。図19(a)、(b)に、a=−0.55のときのh(x)と、整数位置に値を持つ1次元関数f(i)の補間結果を示す。f(i)は、数7でσimage=0.7としたものである。また、図19(c)、(d)に、a=−1.0のときのh(x)と、整数位置に値を持つ1次元関数f(i)の補間結果を示す。
【0118】
a=−1.0は、多くの画像処理の教科書などでバイキュービック補間として紹介されるパラメータである。sinc関数を良く近似しているが、少なくともここで検討した関数f(i)を良好に補間しているとは言い難い。a=−0.55は、sinc関数の近似としてはそれほど良くないが、関数f(i)を良好に補間している。
【0119】
図16から図18では、パラメータa=−0.55を用いたが、この値はサブピクセル推定誤差を小さくするように数値的に求めた結果である。a=−0.5を用いるとバイリニア補間の結果と同程度、a=−1.0を用いるとバイリニア補間を用いたサブピクセル推定結果よりも誤差が大きくなる。
【0120】
(3―6)各方法による推定誤差の総合比較
以下では、2次元画像のパラメータをより広範囲に変更して、各手法のサブピクセル推定誤差を比較検討する。2次元画像は、前述したコーナー画像を使用する。考慮するパラメータとして、回転角度をθg=0,π/16,2π/16,3π/16,4π/16、コーナー角度をθc=π/4,π/3を考える。合計10種類の2次元画像に対する推定誤差を検討する。また、σimage=1.0を考える。
【0121】
画像間変位は、−0.5≦ds≦+0.5、−0.5≦dt≦+0.5の範囲で、0.1[画素]ごとに与える。このとき、2次元推定誤差の大きさ、
のRMS誤差を評価した。
【0122】
評価したサブピクセル推定方法は、前述した各方法の他に、従来の1次元推定方法に対するサブピクセル推定誤差低減方法を適用した推定結果も評価した。したがって、
・サブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)
・サブピクセル推定誤差低減方法を用いない本発明の実施例1に係る2次元推定(2D)
・サブピクセル推定誤差低減方法を用いた1次元推定(1D−EEC)
・サブピクセル推定誤差低減方法を用いない1次元推定(1D)
・バイリニア補間を用いた2次元推定(Bi−Linear)
・バイキュービック補間を用いた2次元推定(a=−0.55)(Bi−Cubic)
の6種類の推定方法の推定誤差を評価した。評価した結果を表1に示す。
【0123】
【表1】
【0124】
表1から次のことが分かった。
まず、サブピクセル推定誤差低減方法を用いた1次元推定(1D−EEC)は、回転角度θg=0のときには、従来の1次元推定(1D)に対して推定誤差を低減できる。しかし、回転角度θg≠0のときには差が現れない。回転角度θgは、異方性がある類似度の回転角度に対応する。
【0125】
次に、バイリニア補間(Bi−Linear)やバイキュービック補間(Bi−Cubic)を用いた2次元推定は、1次元推定(1D)に対して推定誤差が2桁程度小さい。この差は歴然である。バイリニア補間(Bi−Linear)を用いた2次元推定は、濃度こう配法に対応する。濃度こう配法が高精度にサブピクセル推定ができると考えられてきた理由はここにある。
【0126】
それから、バイキュービック補間(Bi−Cubic)を用いた2次元推定は、バイリニア補間(Bi−Linear)を用いた2次元推定よりも高精度である。しかし、重み関数のパラメータによって結果は異なる。重み関数のパラメータを調整するということは、補間フィルタの特性を調整することに対応する。すなわち、画像に対して適切な補間フィルタを選択することで、画像補間を用いたサブピクセル推定手法では精度を向上させることができる。
【0127】
最後に、サブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)は、バイキュービック補間(Bi−Cubic)を用いた2次元推定よりも推定誤差が小さく、しかも、パラメータ調整の必要がない。サブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)は、サブピクセル推定誤差低減方法を用いない本発明の実施例1に係る2次元推定(2D)よりも計算コストが大きい。そこで、計算コストを重視して推定結果は濃度こう配法と同程度でよいときにはサブピクセル推定誤差低減方法を用いない本発明の実施例1に係る2次元推定(2D)を利用し、さらに高精度な推定結果を得たいときにはサブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)を利用する、という使い分けも可能である。
【0128】
(4)本発明の実施例1に係る2次元推定方法を実装したコンピュータ・プログラムによる推定実験
本発明の実施例1に係る2次元推定方法を実装したコンピュータ・プログラムを、CPUを備えた情報処理端末(例えば、パソコン、ワークステーション等のコンピュータ)に実行させることによって、合成画像及び実画像を用いて、2次元サブピクセル推定実験を行った。なお、本発明でいうコンピュータ・プログラムは、便宜上プログラムと略して称することもある。
【0129】
(4―1)合成画像を使った推定実験
前述したコーナー画像を作り、2次元サブピクセル推定実験を行った。作成した合成画像は、8bitモノクロ画像で、画像サイズが64×64[画素]で、注目範囲が11×11[画素]である。画像にノイズは含まれない。画像のパラメータは、σimage=1.0、コーナー角度θc=π/4、回転角度θg=0,π/8,π/4である。画像間変位は、−0.5≦ds≦+0.5、−0.5≦dt≦+0.5の範囲で、0.1[画素]ごとに与えた。
【0130】
図20に従来の1次元推定と、サブピクセル推定誤差低減方法を適用した本発明の実施例1に係る2次元推定についての結果を示す。図20において、計算結果をメッシュで、実験結果を●で表す。実験結果と計算結果との相違の原因は、画像が8bit量子化階調(256階調)であることが考えられる。また、大きく段差がある部分は、整数での最大類似度を探索した結果が隣の画素位置に移動してしまったためと考えることができる。このように隣の位置に移動してしまうことは、従来の1次元推定方法の根本的な欠点である。
【0131】
(4―2)実画像を使った推定実験
マッチングに利用する画像から得られる2次元類似度の回転角度θg≒0のときには、従来の1次元推定方法でも推定誤差は発生しないが、θg≠0のときには、大きな推定誤差が生じる可能性がある。そこで、マッチングパターンとして2種類のパターンを用いたターゲットトラッキング実験を行った。
【0132】
使用したマッチングパターンは、円形パターンと傾いたエッジパターンである。これらのパターンを図21(a)、(e)に示す。円形パターンの大きさは、直径が約41[画素]である。また、これらのパターンのSSD自己類似度を図21(b)、(f)に示す。
【0133】
円形パターンの自己類似度は等方性なので、従来の1次元推定方法と本発明の実施例1に係る2次元推定方法のどちらでも、推定誤差が小さいことが予想できる。一方、傾いたエッジパターンに対応する自己類似度は異方性でかつ傾いているので、従来の1次元推定方法では推定誤差が大きく、本発明の実施例1に係る2次元推定方法では推定誤差が小さいことが予想できる。
【0134】
マッチングパターンを厚紙に印刷して、トラッキングターゲットとした。ターゲットは、ネジ送り式リニアステージ上を直線的に移動する。ターゲットの移動を約250枚の時系列画像で撮影し、最初の画像を参照パターンとして使い、以後の画像中からターゲットをトラッキングした。注目領域サイズは60×60[画素](図21(a)、(e)中の黒い矩形領域)で、探索領域は移動予測位置に対して±8(17×17)である。ターゲットは画像上で右下方向にゆっくり移動する。マッチングが正しくでき、サブピクセル推定に誤差がなければ、計測軌跡は直線になる。従来の1次元推定方法と本発明の実施例1に係る2次元推定方法のどちらにもSSD自己類似度を使用し、サブピクセル推定誤差低減方法を適用したパラボラフィッティングによるサブピクセル推定を行った。
【0135】
図21(c)、(d)に、トラッキングパターンとして円形パターン使ったときの計測結果を示す。図21(c)は従来の1次元推定方法、図21(d)は本発明の実施例1に係る2次元推定方法を使った結果である。どちらの場合も、サブピクセル推定誤差が小さく、軌跡は良好な直線になっている。
【0136】
図21(g)、(h)に、トラッキングパターンとして傾いたエッジパターン使ったときの計測結果を示す。図21(g)は従来の1次元推定方法、(h)は本発明の実施例1に係る2次元推定方法を使った結果である。従来の1次元推定方法では、非常に大きなサブピクセル推定誤差が発生していることが明らかである。
【0137】
本発明の実施例1に係る2次元推定方法では、トラッキングパターンによらず推定誤差が小さいが、円形パターンのときよりも計測軌跡が直線から外れている。この理由は、2次元類似度が2次元ガウスモデルと異なるため、HELとVELを直線近似するときに誤差が含まれることが原因と考えられる。
【0138】
現実的には、このようなトラッキングパターンを利用することはまれである。しかし、この実験は、従来の1次元推定方法を使うと、マッチングパターンによっては、予想外に大きなサブピクセル推定誤差が発生する可能性があることを示している。この実験では、対象が直線上を移動していることがわかっているので、サブピクセル推定誤差を確認することができた。しかし、たとえば、異なる方向から撮影した複数の画像を使って、建築物の3次元情報を再構築するときなどには、傾いたエッジパターンの領域をマッチング領域として利用することもある。従来の1次元推定方法では、このようなときに大きな推定誤差が発生するという問題点があった。
【0139】
なお、本発明の実施例1では、水平極値線HELと垂直極値線VELを求める際、3点を最小二乗で近似する直線を求める代わりに、3点を通る2次曲線として求めることにより、直線近似による誤差を低減するように本発明の実施例1に係る2次元推定方法を拡張することもできる。
【0140】
実施例2及び実施例3:
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法の実施例2及び実施例3を次のように説明する。本発明の実施例2及び実施例3の着眼点は以下の通りである。
【0141】
(A)平行移動と回転、または、平行移動と回転とスケール変化を画像間対応パラメータ(本発明では、略してパラメータとも呼んでいる)にして、これらのパラメータを軸とする多次元空間(本発明では、パラメータ空間或いは多次元類似度空間とも称する)において離散的な位置で得られた類似度を利用する。類似度は離散的な位置で計算しておけばよいので、繰り返し計算の必要がない。
【0142】
(B)離散的な位置で得られた類似度は、多次元空間(つまり、パラメータ空間)における連続関数である類似度をサンプリングしたものであると考える。
【0143】
(C)現実的な仮定の下に類似度をモデル化したとき、多次元空間における各軸(つまり、パラメータ空間における各パラメータ軸)で類似度を偏微分して0とおくことで得られる超平面は、類似度の最大値または最小値を通る。例えば、類似性評価関数にSADやSSDが採用された場合に、超平面は類似度の最小値を通る。また、類似度評価関数にZNCCが採用された場合に、超平面は類似度の最大値を通る。
【0144】
(D)このような超平面は、多次元空間の軸の数(つまり、パラメータ数)だけ求めることができる。これらの超平面の交点座標は、多次元空間における類似度の最大値または最小値を与えるパラメータと一致するため、これらの超平面の交点座標を求めることで、多次元空間における類似度の最大値または最小値を与えるパラメータを同時に求めることができる。
【0145】
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法は、サンプリンググリッドで離散的に得られた評価値を使って、高精度なサブサンプリンググリッド精度の評価値最大位置または最小位置を推定する方法と考えることができる。
【0146】
画像間の対応を平行移動のみに限定して考えるとき(つまり、本発明の実施例1の場合)には、このサンプリンググリッドは画像を構成する画素に相当する。このため、画素単位以上に高精度な平行移動量の表現として、サブピクセルという表現が適切だった。従って、前述したように、本発明の実施例1に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法を「2次元サブピクセル推定方法」とも呼んでいる。
【0147】
しかし、平行移動と回転、または、平行移動と回転とスケール変化を画像間対応パラメータにする場合の本発明、つまり、本発明の実施例2及び実施例3に係る多パラメータ高精度同時推定方法では、画素やサブピクセルといった表現は一般性を欠いているので、以後ではそれぞれサンプリンググリッド、サブサンプリンググリッドという表現を採用する。
【0148】
<1>実施例2に係る3パラメータ同時推定方法
<1−1>3パラメータ同時推定方法の原理
ここでは、本発明の実施例2に係る3パラメータ同時推定方法の原理を説明する。本発明では、画像間の対応を探索するときには、何らかの類似度評価関数を利用して、類似度評価関数の最小または最大を探索する。このとき得られる類似度は、用いる類似度評価関数によっても異なるが、それ以上に入力として扱う画像によって異なる。
【0149】
ここでは、具体的な入力画像や類似度評価関数には触れず、画像間の類似度を次の3次元ガウス関数で近似して、これを3次元類似度モデルとする。
【数55】
ただし、(s1,s2,s3)は探索パラメータ(つまり、画像間対応パラメータ)で、σはガウス関数の標準偏差で、(k2,k3)は異方性係数(k2,k3>0)である。また、(t1,t2,t3)は、次のように(s1,s2,s3)に対して回転と平行移動を行った結果である。
【0150】
【数56】
ただし、(d1,d2,d3)は探索パラメータ(s1,s2,s3)の正解値で、(θ1,θ2,θ3)はそれぞれ(s1,s2,s3)の各軸回りの回転角度で、0≦θ1,θ2,θ3≦π/2の範囲を考慮する。
【0151】
この3次元類似度モデルをs1,s2,s3で偏微分して0とおくと、次の3平面を得ることができる。
【数57】
【数58】
【数59】
【0152】
Π1,Π2,Π3は、3次元空間内(つまり、s1,s2,s3を軸とするパラメータ空間)の3平面を構成している。この3平面の交点は、明らかに(d1,d2,d3)であり、正解パラメータと一致する。3平面の交点が求まらない条件は、3次元類似度モデルが3次元未満に縮退した場合である。このような条件では、k2,k3=0または∞となり、3次元類似度モデルの条件と一致しない。
【0153】
<1−2>3パラメータ同時推定方法の実装
以下では、3パラメータ同時推定方法において、サブサンプリンググリッド推定値を求める具体的な方法を説明する。例えば、この3パラメータは、平行移動量(ds,dt)と回転角度θと考えることができる。
【0154】
前節『3パラメータ同時推定方法の原理』で示したように、パラメータ空間における類似度値を各パラメータ軸に関して微分して0とおくことで、各パラメータの最大値位置または最小値位置を通る3平面を作ることができる。従って、サンプリンググリッドにおいて得られた類似度値を用いて、この3平面を推定することができれば、各パラメータの類似度値の最大位置または最小位置をサブサンプリンググリッドにおいて求めることができる。
【0155】
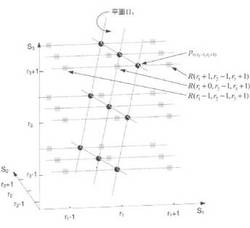
まず、平面Π1の求め方を説明する。平面Π1上の点は、s1軸に沿って類似度を微分した結果が0になる点だから、s1軸に平行な直線上の類似度値を使ってサブサンプリング位置を推定することで、平面Π1上の点をいくつか求めることができる。図22はパラメータ軸s1に関する最大値を通る平面Π1を説明するための模式図である。図22では、類似度値が得られているサンプリング位置を正方形で、s1軸に平行な直線上で求めたサブサンプリング推定位置を黒丸で示している。類似度値のグリッド単位最大値位置は、(r1,r2,r3)である。
【0156】
(s1,s2,s3)における類似度値をR(s1,s2,s3)とすると、R(r1+i1,r2+i2,r3+i3)(i1,i2,i3=−1,0,1)の27点の類似度値を使って、平面Π1上の9個の点(p1(r2+i2,r3+i3),r2+i2,r3+i3)を推定することができる。推定には、次のパラボラフィッティングを用いることができる。
【数60】
【0157】
また、後述するように、パラボラフィッティングによる推定誤差を低減する手法を適用することもできる。
【0158】
数60のパラボラフィッティングを行うときには、R(r1,r2+i2,r3+i3)の類似度値が最大であることを前提としているが、画像パターンによってはこの前提が成立しない場合もある。たとえば、画像に含まれるテクスチャのせん断変形が極端なときには、i2=i3=±1の位置でR(r1,r2+i2,r3+i3)が最大値にならないことがある。このときにも(r2+i2,r3+i3)を通りパラメータ軸s1に平行な直線上でサブサンプリンググリッド推定位置を求める必要がある。この場合には、この直線上のサンプリンググリッド上に求まっている類似度値の最大値位置を探索し、修正最大値位置r1’に関して数60のパラボラフィッティングを行えばよい。
【0159】
以後の説明では、数式表記を簡略化するために、s1−r1→s1,s2−r2→s2,s3−r3→s3のように各パラメータ軸に沿って(r1,r2,r3)だけ平行移動して(r1,r2,r3)をパラメータ軸の原点位置と考える。このような平行移動は、グリッド単位での類似度最大位置を原点に移動することと等しく、本発明に関する一般性を失うものではない。本発明に係る多パラメータ高精度同時推定方法によって求めたサブサンプリンググリッド位置を最終的に(r1,r2,r3)と加算することで、平行移動する前のサブサンプリンググリッド位置を簡単に計算することができる。
【0160】
平面Π1上にあると期待される9点のサブサンプリンググリッド位置は、実際の画像ではノイズや画像間の変形の影響で、完全には平面上にない可能性がある。このため、これらの9点を最小二乗法によって平面Π1にあてはめる。具体的には、9点と平面Π1とのs1軸の沿った距離の2乗和を最小にするように係数を決めればよい。平面Π1は、次のように求めることができる。
【0161】
【数61】
となる。同様にして、平面Π2,Π3は、次のように求めることができる。
【0162】
【数62】
【数63】
【0163】
平面Π1,Π2,Π3の交点
が、サブサンプリング推定位置で、次のように求めることができる。
【数64】
【数65】
【0164】
<2>実施例3に係るNパラメータ同時推定方法
<2−1>Nパラメータ同時推定方法の原理
ここでは、本発明の実施例3に係るNパラメータ同時推定方法の原理を説明する。パラメータ数が3より多いときにも、本発明では同様の考え方でサブサンプリンググリッド高精度同時推定をすることができる。s1からsNまでのN個のパラメータによって類似度値が決定するときに、類似度値を次のようにガウス関数のn個の乗算として表現する。
【0165】
【数66】
ただし、
はN次元類似度空間における座標を表すN次元ベクトルで、
はN次元空間での回転と平行移動を表す行列で、
はガウス関数の異方性係数ベクトル(N−1次元)である。
【0166】
このとき、数66で表されるN次元類似度モデルをsi(i=1,2,…,N)で偏微分して0とおくことで、次のようなN個のN次元関係式を得ることができる。
【数67】
【0167】
これらの関係式を連立させて解くことで、N次元類似度のサブサンプリンググリッド推定値を得ることができる。つまり、それらの関係式の解は、N次元類似度のサブサンプリンググリッド推定値になるわけである。なお、N次元類似度モデルが数66のガウス関数乗算モデル近似からずれると、数67は完全な超平面にはならないが、このときには、最小二乗法などで超平面に近似すればよい。
【0168】
<2−2>Nパラメータ同時推定方法の実装
以下では、Nパラメータのサブサンプリンググリッド同時推定を実際に行う具体的な方法を説明する。まず、サブサンプリンググリッド同時推定を行うときに、前提としてサンプリンググリッドでの類似度最大位置はわかっており、その(変位)位置を
とする。
【0169】
類似度値Rをパラメータ軸si(i=1,2,…,N)について偏微分した結果が0になるN次元超平面Πi上には、siパラメータ軸と平行な直線上の類似度値
の3つの値をパラボラフィッティングによってサブサンプリンググリッド推定した3N−1個の位置、
が存在する。ただし、
【数68】
である。
【0170】
ここで、
は、i番目の要素だけが値k(k=−1,0,+1)であり、他の要素は全て値0であるようなN次元ベクトルである。たとえば、
である。また、
は、i番目の要素が0で、他の各要素は、−1,0,1のいずれかの値をとるようなj番目(j=1,2,…,3N−1)のN次元ベクトルである。たとえば、
である。
【0171】
これらの3N−1個の位置、
は、N次元超平面Πi上に存在するか、少なくとも最小二乗の意味でN次元超平面Πiにフィットする。従って、N次元超平面Πiを
【数69】
と表すと、3N−1個の位置、
に対して、
【数70】
の関係が得られる。これを、次のように書き換える。
【0172】
【数71】
ただし、
は、3N−1行N列の行列で、
は要素数Nのベクトルである。N次元超平面Πiを表す係数
は、一般化逆行列を用いた最小二乗法によって、次のように求めることができる。
【0173】
【数72】
このようにして求めたN個のN次元超平面Πi(i=1,2,…,N)の交点として、Nパラメータのサブサンプリンググリッド推定値を得ることができる。この交点は、次のように求めることができる。
【0174】
【数73】
【数74】
【0175】
以上の方法でNパラメータの同時推定を行うことができるが、実際にはN次元超平面Πiの式を、同じN個の未知数を含む次のような形式に表現してもよい。
【数75】
【0176】
その理由は、N次元類似度関数がN次元対称になっても安定に超平面の交点が存在するようにするためである。
【0177】
また、N次元超平面Πi上の3N−1個の位置を求めることでN次元超平面の係数を求めたが、この個数を減らすこともできる。たとえば、N=3のときには3N−1=9だが、たとえばj=3のときには、具体的に次のようになっている。
(−1,−1,0) (0,−1,0) (+1,−1,0)
(−1,0,0) (0,0,0) (+1,0,0)
(−1,+1,0) (0,+1,0) (+1,+1,0)
【0178】
この中から、次のような組を採用することで、個数を2(N−1)+1個にすることができる。
(0,−1,0)
(−1,0,0) (0,0,0) (+1,0,0)
(0,+1,0)
【0179】
<3>本発明による実験結果と従来手法による実験結果との比較
図23に示す時系列画像を人工的に作成した。この時系列画像は、濃淡で表現した2次元ガウス関数で構成されている。この実験で用いた2次元ガウス関数には方向性(異方性) があり、しかもその方向性が0または90度以外の方向になるように設定されている。このため、この画像から計算する類似度にも異方性があり、かつ回転角度が0または90度以外になる。
【0180】
図23に示す画像は時系列画像の最初のフレームで、以後のフレームは最初のフレームに対して位置が変化せず回転角度だけがフレームごとに0.1度ずつ変化する。時系列画像は全部で31フレームあり、最終フレームは先頭フレームに対して3度回転した画像になっている。これに対して画像の位置は回転中心に対して移動しない。
【0181】
図24に、最初のフレームに対する以後のフレームの回転角度を計測した結果を示す。+印で示す従来方法は、画像を6×6=36個の領域に分割し、各小領域ごとに平行移動量をマッチングによって計測し、得られた平行移動量を使って回転角度を推定した結果である。○印で示す本発明による方法は、従来方法で計測した回転角度を初期推定値として本発明を適用し、さらに高精度に回転角度を計測した結果である。フレームごとに0.1度ずつ回転角度が変化する状況が正確に計測できている。
【0182】
図25に、最初のフレームに対する以後のフレームの位置を計測した結果を示す。+印で示す従来方法は、画像を6×6=36個の領域に分割し、各小領域ごとに平行移動量をマッチングによって計測し、得られた平行移動量の平均として位置を推定した結果である。○印で示す本発明による方法は、従来方法で計測した位置を初期推定値として本発明を適用し、さらに高精度に位置を計測した結果である。位置が変化しない状況が正確に計測できている。
【0183】
<4>本発明の他の実施例
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法の他の実施例を以下のように説明する。
【0184】
<4−1>サブピクセル推定誤差低減方法との組み合わせ
数60でサブサンプリンググリッド推定位置を求めるときに、3位置の類似度を使ってパラボラフィッティングを用いているので、この推定値には固有の推定誤差を含んでいる。この推定誤差は、補間画像を利用することでキャンセルすることができる。ここでは、2パラメータのときに画像間の水平方向変位に関するサブピクセル位置を推定するときを例に説明する。
【0185】
マッチングに使う2次元画像関数をI1(u,v),I2(u,v)とするとき、SSDとパラボラフィッティングによって推定する水平方向サブピクセル位置は、次のように表すことができる。
【数76】
【数77】
【0186】
一方、画像I1(u,v)の水平方向補間画像I1iu(u,v)は、
【数78】
と表すことができる。ただし、このときの(u,v)は整数である。
【0187】
水平方向補間画像I1iu(u,v)は、I1(u,v)に対して(0.5,0)だけ変位していると考えることができる。この補間画像を使って、次に示すSSD類似度でサブピクセル推定を行うと、推定結果も(0.5,0)だけ変位していると考えることができるので、その変位を補正した推定結果は、次式で求めることができる。
【数79】
【数80】
【0188】
数78も数60と同様に推定誤差を含むが、その位相が逆になっているので、次式によって推定誤差をキャンセルすることができる。
【数81】
【0189】
<4−2>アフィンパラメータ推定
画像間の対応がアフィン変換で表現できるとき、下記数82の変形モデル中の6個のパラメータを決定する必要がある。
【0190】
【数82】
ただし、(u1,v1),(u2,v2)は、それぞれ画像I1,I2を表す座標で、画像I2を変形して画像I1に合わせている。
【0191】
離散的な位置で得られた類似度値を用いて、この6つのパラメータを同時に高精度に推定することができる。
【0192】
<4−3>射影パラメータ推定
画像間の対応が射影変換で表現できるとき、下記数83の変形モデル中の8個のパラメータを決定する必要がある。
【0193】
【数83】
ただし、(u1,v1),(u2,v2)は、それぞれ画像I1,I2を表す座標で、画像I2を変形して画像I1に合わせている。
【0194】
離散的な位置で得られた類似度値を用いて、この8つのパラメータを同時に高精度に推定することができる。
【0195】
<4−4>高速探索手法との組み合わせ
本発明によるサブサンプリンググリッド推定方法は、サンプリンググリッド単位での対応が正しく得られた後の高精度化処理と考えることもできる。したがって、サンプリンググリッド単位での探索には、すでに提案されている各種の高速化手法を用いることができる。
【0196】
例えば、画像の濃度情報を利用した高速探索手法としては、画像ピラミッドを用いた階層構造探索法、SSDやSADに上限値を設けて以後の積算を打ち切る手法などがある。また、画像の特徴を利用する高速探索方法としては、注目領域の濃度ヒストグラムを利用する方法などがある。
【0197】
なお、本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法を実装したコンピュータ・プログラムを、CPUを備えた情報処理端末(例えば、パソコン、ワークステーション等のコンピュータ)に実行させることによって、合成画像或いは実画像を用いて、多パラメータを同時に高精度に推定することができる。
【産業上の利用可能性】
【0198】
以下のように、本発明を色々な画像処理分野に適用することができる。例えば、リモートセンシングや航空写真を使った地図作製では、複数の画像をつなぎ合わせること、つまりモザイキングを行うことが多い。このとき、画像間の対応位置を求めるために、領域ベースのマッチングを行う。このときには、対応が正しいことはもちろん、対応が画素単位より細かな分解能で求まることが重要になう。さらに、多数の画像を利用して対応を求めるので、計算の高速性も重要である。領域ベースマッチングを使って画素分解能以上の対応を求めるときには、画素単位のとびとびの位置で求まる類似度評価値を使って、フィッティング関数によるサブピクセル推定を行っているが、このときに本発明を適用することで、計算時間の増加がわずかで、はるかに高精度な対応位置を求めることができる。
【0199】
特に、画像パターンに斜め成分が含まれるとき、つまり、地図作製などで道路交差点などのパターンが画像座標系に対して傾いて撮影されているときに、本発明の効果が一層発揮される。
【0200】
また、ステレオビジョンでは、複数枚の画像間の対応位置を求めることが基本的な処理であり、このときの対応位置精度が最終的な結果精度に大きく影響を及ぼす。画像間の対応位置を求めるときには、エピポーラ拘束などの拘束条件を利用するが、エピポーラ拘束条件自体を求めるときにも画像間の対応を調べる必要があり、このときにはエピポーラ拘束を利用できない。従って、本発明を適用することによって、高精度にエピポーラ拘束条件を求めることが可能になるため、結果として高精度なステレオ処理を行うことができるようになる。
【0201】
さらに、MPEG圧縮を行うときには、隣接フレーム間の対応位置を正確に求めることが、高品質で高圧縮率を達成するために必要である。隣接フレーム間の対応位置は、通常は1/2画素単位で求めるが、このときにはSADやSSD類似度評価値を利用した1次元の簡易手法を利用しているため、大きな誤差が含まれている可能性が在る。ところが、本発明は、従来の1次元推定方法に対してわずかな計算量の増加で、より確実で高精度な画像間の対応を求めることができるため、MPEG画像生成の圧縮率を向上することが可能になる。
【図面の簡単な説明】
【0202】
【図1】図1は、従来の1次元サブピクセル推定方法を説明するための図である。
【図2】図2は、3次元再構成アプリケーション用に一般的に使用される画像例(a)とその自己類似度(b)を示す図である。自己類似度マップは、自己類似度マップがk≠1及びθg≠0の性質を有しているので、従来の1次元推定方法を用いることでサブピクセル推定誤差が生じることを示している。
【図3】図3は、θc=π/2を有するテクスチャ画像例とその自己類似度を示す図である。
【図4】図4は、2次元画像モデルとその2次元類似度を示す図である。(a)はσimage=0.7の画像モデルを示し、画像のサイズは11×11[画素]である。(b)は画像モデルの自己類似度を示し、類似度の範囲は11×11である。(s,t)の暗い位置は高い類似度を有する2枚の画像の変位に対応する。最も暗い位置の(s,t)は、自己類似度の性質で(0,0)になる。
【図5】図5は、画像全体の回転角度θgとコーナー角度θcを有する2次元コーナー画像モデルを示す図である。
【図6】図6は、2次元コーナー画像モデルとその2次元自己類似度を示す図である。(a)、(b)、(c)は、θc=π/2、σimage=1の画像モデルで、それぞれθg=0,π/8,π/4である。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、θc=π/4、σimage=1の画像モデルで、それぞれθg=0,π/8,π/4である。(j)、(k)、(l)は、それぞれ(g)、(h)、(i)に対応する類似度である。
【図7】図7は、画像全体の回転角度θgと水平方向空間周波数fuと垂直方向空間周波数fvを有する2次元繰り返しテクスチャ画像モデルを示す図である。
【図8】図8は、2次元繰り返しテクスチャ画像モデルとその2次元自己類似度を示す図である。(a)、(b)、(c)は、fu=0.1、fv=0.1の画像モデルで、それぞれθg=0,π/8,π/4である。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、fu=0.05、fv=0.1の画像モデルで、それぞれθg=0,π/8,π/4である。(j)、(k)、(l)は、それぞれ(g)、(h)、(i)に対応する類似度である。自己類似度は一定の変位を有する2枚同様な画像から得られる。画像のサイズは11×11[画素]で、類似度の範囲は−5から5までである。
【図9】図9は、画像全体の回転角度θgと水平標準偏差σと垂直標準偏差kσを有する2次元ガウス画像モデルを示す図である。
【図10】図10は、2次元ガウス画像モデルとその2次元自己類似度を示す図である。(a)、(b)、(c)は、σ=2、k=1の画像モデルで、それぞれθg=0,π/8,π/4である。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、σ=2、k=0.5の画像モデルで、それぞれθg=0,π/8,π/4である。(j)、(k)、(l)は、それぞれ(g)、(h)、(i)に対応する類似度である。自己類似度は一定の変位を有する2枚同様な画像から得られる。画像のサイズは11×11[画素]で、類似度の範囲は−5から5までである。
【図11】図11は、3種類異なった2次元画像モデルと、それらの2次元自己類似度と、2次元類似度モデルに比較して2次元自己類似度の部分図を示す図である。(a)はθc=π/4、σimage=1、θg=0を有する2次元コーナー画像モデルを示す。(b)はfu=0.051、fv=0.1、θg=0を有する2次元繰り返しテクスチャ画像モデルを示す。(c)はσ=2、k=0.5、θg=0を有する2次元ガウス画像モデルを示す。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、整数位置(〇で表す)でサンプリングされた(d)、(e)、(f)のt=0の水平部分図と、2次元類似度モデル(点線で表す)を示す。
【図12】図12は、2次元連続的に類似度計算と離散的に類似度計算の例を示す図である。
【図13】図13は、(ds,dt)=(0.2,0.4)、σ=1、k=0.7、θg=π/6を有する2次元類似度モデルを示す図である。等高線は関数値の10%から90%までに対応している。(a)において、2次元類似度モデルの長軸がθg=π/6を示す。(b)において、HEL(水平極値線)とVEL(垂直極値線)の両方が2次元類似度モデル(ds,dt)のピーク値位置を通るが、2次元類似度モデルの長軸或いは短軸と異なる。
【図14】図14は、HELとVELの推定プロセスを説明するための図である。(a)において、●は3本の水平線t=−1、t=0、t=1上の類似度値(□)から得られた推定サブピクセル位置を示し、HELは最小二乗で3つ●の位置から推定されることが可能である。(b)において、VELは同様なプロセスで推定されることが可能である。
【図15】図15は、従来の1次元推定方法及び本発明の実施例1に係る2次元推定方法にそれぞれ必要な類似度値の位置を示す図である。2次元類似度モデルは(ds,dt)=(0.2,0.4)、σ=1、k=0.3、θg=π/8を有する。
【図16】図16は、推定誤差を比較するための図である。(a)は比較用に使用される画像モデルで、即ち、θg=0、θc=π/4、σimage=1.0の2次元コーナーモデルである。(b)は(a)の画像モデルの自己類似度を示す。
【図17】図17は、推定誤差を比較するための図である。(a)は比較用に使用される画像モデルで、即ち、θg=π/8、θc=π/4、σimage=1.0の2次元コーナーモデルである。(b)は(a)の画像モデルの自己類似度を示す。
【図18】図18は、推定誤差を比較するための図である。(a)は比較用に使用される画像モデルで、即ち、θg=π/4、θc=π/4、σimage=1.0の2次元コーナーモデルである。(b)は(a)の画像モデルの自己類似度を示す。
【図19】図19は、重み関数とパラメータに依存する補間特性を説明するための図である。
【図20】図20は、合成画像を使った実験結果を示す図である。
【図21】図21は、実画像を使ったターゲットトラッキング実験結果を示す図である。
【図22】図22は、本発明の実施例2に係る3パラメータ同時推定方法において、パラメータs1に関する最大値を通る平面Π1を説明するための模式図である。
【図23】図23は、実験に用いた合成画像である。
【図24】図24は、画像の回転計測結果を示す図である。
【図25】図25は、画像の位置計測結果を示す図である。
【技術分野】
【0001】
本発明は、例えば画像による位置計測、リモートセンシング、航空写真を利用した地図作製、ステレオビジョン、画像張り合わせ(モザイキング)、動画像位置合わせ、3次元モデリングなど多数の画像処理分野で使用できる、領域ベースマッチングを用いた推定方法に関し、特に、画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法に関するものである。
【背景技術】
【0002】
ステレオ画像処理をはじめとして、トラッキング、画像計測、リモートセンシング、画像レジストレーションなどの多くの画像処理分野では、画像間変位を得るために、領域ベースマッチングが基本的な処理として採用されている。
【0003】
領域ベースマッチングは、注目領域のサイズや形状を任意に設定できること、注目画素に対して注目領域をオフセットできること、計算が直感的で直接的な実装が可能であることなどが特徴である。領域ベースマッチングで画像間の変位をサブピクセルで求めるときには、画素単位で離散的に得られる類似度評価値を利用してサブピクセル変位を推定する方法が一般的に利用されている。
【0004】
画像間の対応を求めるためには、類似度と呼ぶ評価値を利用する。類似度とは、画像間の相対的な位置関係を入力、その位置関係のときの画像間の類似度を出力とする関数である。類似度は、画素単位の離散的な位置で値が決まるので、類似度だけをもとに画像間の対応位置関係を求めると、画素単位の分解能に制限される。そこで、類似度値をもとに補間することによって、サブピクセル分解能の画像間の対応を求める。
【0005】
従来、位置分解能を拡大するために、類似度評価値をフィッティング内挿することでサブピクセル推定を行うことが多い。しかし、画像の平行移動量をサブピクセル分解能で求める際に、画像の水平方向と垂直方向を独立にフィッティング内挿していたため、十分な精度が得られなかったという問題点があった。
【0006】
要するに、従来、デジタル画像を使った領域ベースのマッチングでは、変位の推定分解能を向上させるために、画像の水平/垂直方向について独立に類似度評価値を使ったサブピクセル推定を行っていた。
【0007】
また、従来、濃度こう配法を利用して画像間の変位を求めると、はじめからサブピクセル変位量を得ることができる。濃度こう配法では、水平方向と垂直方向を合わせて扱っている。ただし、画像間変位が1画素以上のときには画像を縮小する必要がある。通常は、画像スケールの変更と同時に実装する。濃度こう配法の実装は繰り返し計算になるので、計算時間の見積もりや、ハードウェアへの実装が困難であるという欠点があった。
【0008】
さらに、画像をDFTしてから複素共役積をもとめて逆DFTする従来手法では、注目領域のサイズが2nでなければならず、各種テクニックが必要である。流体計測分野では多く用いられ、計算量を小さくできることが特徴である。しかし、ビジョン分野では、ほとんど利用されない。しかも、計測対象が平面であるという仮定を用いているので、凹凸がある計測対象には適用が困難であるという欠点があった。
【0009】
従来は、以下のように詳細に説明されるように、画像の水平方向と垂直方向を独立に補間推定していた。しかし、従来のこのような方法によると、図1に示すように、推定誤差が発生するという問題点があった。
【0010】
ここでは、画像を水平方向と垂直方向に独立と考え、変位のサブピクセル推定も独立に行う従来方法を「1次元推定方法」と称する。
【0011】
従来の1次元推定方法の問題点を説明するために、まず、画像間の水平方向変位を求める問題を考える。真の画像間変位を(ds,dt)、異方性を持った類似度の回転角度をθgとする。1次元推定方法では、離散化類似度として、R(−1,0)、R(0,0)、R(1,0)(図1の□)を使い、下記数1によって
を推定した。なお、図1は、従来の1次元サブピクセル推定方法を説明するための図である。図中の
は、s=−1,0,1での3つの類似度の値を用いた従来の1次元サブピクセル推定方法によって推定された位置で、dt≠0及びθg≠0の際に、この推定値は真のピーク位置に対して誤差を有する。
【数1】
【0012】
仮に上記数1で直線t=0上の類似度最大位置を正しく推定できたとしても、図1から明らかなように、真の水平方向画像間変位ds(図1の▲の水平成分)に対して大きな推定誤差を含んでいる。すなわち、次の条件の全てが真のときには、水平方向推定誤差が発生して、
となる。
・垂直方向変位dt≠0。
・2次元類似度が異方性を持つ。
・異方性を持つ2次元類似度の回転角度θg≠0。
大部分の画像が上記条件に当てはまる。
【0013】
また、垂直方向に関しても同様である。例えば、図2(a)に示す画像中のコーナー領域のSSD自己類似度を求めると、図2(b)のようになっている。この自己類似度は異方性を持ち、θg≠0なので、従来の1次元推定方法では、サブピクセル推定誤差が発生する可能性があることを示している。また、図3(a)に示すテクスチャ画像を使ったサブピクセル推定においても、推定誤差が発生する可能性を示している。
【0014】
また、コンピュータビジョンの分野によっては、エピポーラ拘束などの拘束条件を利用することで探索範囲を1次元に限定できるので、1次元信号の高精度なマッチングができれば十分な場合がある。しかしながら、2次元画像を使って、高精度な2次元変位を求める必要がある用途も多い。例えば、動き推定、動き推定による領域分割、ターゲットトラッキング、モザイキング、リモートセンシング、超解像などである。
【0015】
画像の領域ベースマッチングにおいて、画像間変位が平行移動だけで表現できるときには、従来から多くの手法が提案され、実際に用いられてきた。たとえば、代表的な手法として、領域ベースマッチングと類似度補間手法を組み合わせた、サブピクセル推定手法は、次のようにして画像間のサブピクセル変位を推定する。
【0016】
対応位置を求める画像を、f(i,j)とg(i,j)としたとき、整数単位の変位(tx,ty)に対する画像間のSADを、次のように計算する。
【数2】
ただし、SADは輝度差の絶対値の和(Sum of Absolute Differences)を表し、Wは対応を求める注目領域を表す。SADは、画像が完全に一致したときに0になり、不一致が増えるに従って大きな値をとる。SADは類似していない評価値を表すので、非類似度である。
【0017】
SADの代わりに、次のSSDを用いることも多い。
【数3】
ただし、SSDは輝度差の絶対値の2乗和(Sum of Squared Differences)を表す。SSDも画像が完全に一致したときに0になり、不一致が増えるに従って大きな値をとる。SSDも類似していない評価値を表すので、非類似度である。
【0018】
SADやSSDの代わりに、次の相関係数(ZNCC:Zero-mean Normalized Cross-Correlation)を用いることもある。ZNCCは、注目領域内の画素濃度を統計データと見なし、注目領域間の統計的な相関値を計算している。
【数4】
ただし、
は、それぞれの領域内の濃度平均である。RZNCCは−1から1までの値をとり、画像が完全に一致したときに1になり、不一致が増えるに従って小さな値をとる。ZNCCの特徴は、画像間に濃度やコントラストの変化があってもほとんど同じ類似度が得られることである。
【0019】
ZNCCは類似性の評価値を表すので類似度とよばれるが、SADやSSDは非類似度を表す。ここでは、説明を簡単にするために、以後はSADやSSD、ZNCCを「類似度」と統一して表記する。
【0020】
類似度が最小値(SADやSSDのとき)または最大値(ZNCCのとき)になる整数単位の変位
を探索することで、画像間の整数単位変位を得ることができる。整数単位の変位を得た後で、次のようにサブピクセル変位を推定する。
【数5】
上記数5を用いて、最終的に得る画像間サブピクセル変位は、
となる。
【0021】
このような従来手法では、画像間に回転やスケール変化があるときに正しい対応を得ることができない問題があった。画像間の回転角度がわずかでも、2つの画像が異なるものと判断され、対応位置が見つからないことや、誤った位置に対応を検出する問題があった。
【0022】
一方、画像間の対応が平行移動だけでは表現できない場合、つまり、画像間に回転やスケール変化があるときには、回転やスケール変化も同時に推定する必要がある。従来、このときには、補間処理を用いて片方の画像(テンプレート画像)を平行移動と回転やスケール変化をさせてからマッチングを行い、類似度を計算しながら各パラメータを変化させ、類似度が最小値または最大値になるパラメータを探索する必要があった。次に、このパラメータ探索法を説明する。
【0023】
f(i,j)をテンプレート画像、g(i,j)を入力画像とするとき、平行移動(tx,ty)および回転角度θとスケール変化sをパラメータとする類似度RSSDを次のように計算する。
【数6】
ただし、
は、平行移動(tx,ty)および回転角度θとスケール変化sを与えたときの、位置(i,j)における画像g(i,j)の補間画像を表す。補間画像を作るときには、双線形補間(Bi-Linear補間)や双3次補間(Bi-Cubic補間)などを利用する。また、SSDではなく、SADやZNCCを利用してもよい。
【0024】
何らかの方法で初期パラメータ(tx,ty,θ,s)<0>を求めてRSSD(tx,ty,θ,s)<0>を計算し、より小さなRSSDを与える更新パラメータ(tx,ty,θ,s)<1>を探索する。パラメータを更新しても結果に変化がなくなるまで、更新を続ける。このとき、Newton-Raphson法やSteepest (Gradent) Descent法(最急降下法)、Levenberg-Marquadt 法など数値的解法を用いる。
【0025】
初期パラメータ(tx,ty,θ,s)<0>は、たとえば、画像間の対応が平行移動だけで表現できると仮定して通常の領域ベースマッチングによって推定した
を用いた
などを利用する。
【非特許文献1】清水雅夫・奥富正敏,「画像のマッチングにおける高精度なサブピクセル推定手法」,電子情報通信学会論文誌D-II,2001年7月,第J84-D-II巻,第7号,p.1409-1418
【非特許文献2】清水雅夫・奥富正敏,「画像のマッチングにおける高精度なサブピクセル推定の意味と性質」,電子情報通信学会論文誌D-II,2002年12月,第J85-D-II巻,第12号,p.1791-1800
【非特許文献3】マサオ・シミズ、マサトシ・オクトミ(Masao Shimizu and Masatoshi Okutomi),「プリサイス サブピクセル エスティメイション オン エリアベイセド マッチング(Precise Sub-Pixel Estimation on Area-Based Matching)」,プロク. 8th IEEE インターナショナル コンファレンス オン コンピュータ ビジョン (ICCV2001)(Proc. 8th IEEE International Conference on Computer Vision (ICCV2001)),(カナダ,バンクーバー),2001年7月,p.90-97
【非特許文献4】マサオ・シミズ、マサトシ・オクトミ(Masao Shimizu and Masatoshi Okutomi),「アン アナリシス オフ サブピクセル エスティメイション エラー オン エリアベイセド イメージ マッチング(An Analysis of Sub-Pixel Estimation Error on Area-Based Image Matching)」,プロク. 14th インターナショナル コンファレンス オン デジタル シグナル プロセシング(DSP2002)(Proc. 14th International Conference on Digital Signal Processing (DSP2002)),(ギリシア,サントリーニ),2002年7月,第II巻,p.1239-1242(W3B.4)
【非特許文献5】C.・クエンティン・デイビス、ゾハー・Z.・カル、デニス・M.・フリーマン(C. Quentin Davis, Zoher Z. Karu and Dennis M. Freeman),「イクイバレンス オフ サブピクセル モーション エスティメイタス ベイセド オン オプティカル フロー アンド ブロック マッチング(Equivalence of subpixel motion estimators based on optical flow and block matching)」,IEEE インターナショナル シンポジウム フォー コンピュータ ビジョン1995(IEEE International Symposium for Computer Vision 1995),(米国フロリダ州),1995年11月,p.7-12
【非特許文献6】サムソン・J.・ティモネー、デニス・M.・フリーマン(Samson J. Timoner and Dennis M. Freeman),「マルチイメージ グラジエントベイセド アルゴリズム フォー モーション エスティメイション(Multi-image gradient-based algorithms for motion estimation)」,オプティカル エンジニアリング(Optical Engineering),(米国),2001年9月,第40巻,第9号,p.2003-2016
【非特許文献7】ジョナサン・W.・ブラント (Jonathan W. Brandt),「インプルーブド アキュラシ イン グラジエントベイセド オプティカル フロー エスティメイション(Improved Accuracy in gradient-based Optical Flow Estimation)」,インターナショナル ジャーナル オフ コンピュータ ビジョン(International Journal of Computer Vision),(米国),1997年,第25巻,第1号,p.5-22
【非特許文献8】Q.・テン、M.・N.・ヒューニッス(Q. Tian and M. N. Huhns),「アルゴリズム フォー サブピクセル レジストレーション(Algorithms for Subpixel Registration)」,コンピュータ ビジョン,グラフィックス アンド イメージ プロセシング(Computer Vision, Graphics and Image Processing),(米国),1986年,第35号,p.220-233
【非特許文献9】ショーン・ボーマン、 マーク・A.・ロバートソン、ロバート・L.・スティブンソン(Sean Borman, Mark A. Robertson and Robert L. Stevenson),「ブロックマッチング サブピクセル モーション エスティメイション フロム ノイジー,アンダー―サンプルド フレームス---アン エンパイリカル パフォーマンス エバリュエーション(Block-Matching Sub-Pixel Motion Estimation from Noisy, Under-Sampled Frames---An Empirical Performance Evaluation)」,SPIE ビジュアル コミューニケイションズ アンド イメージ プロセシング 1999(SPIE Visual Communications and Image Processing 1999),(米国カリフォルニア州)
【発明の開示】
【発明が解決しようとする課題】
【0026】
このような多パラメータ最適化では、初期値が適切でないと正しい結果が得られない問題がある。また、画像パターンやノイズ、撮影レンズの光学歪みなどの影響で解が得られない問題もある。さらに、繰り返し計算を利用するので、計算時間を見積もることができないといった難点がある。このため、アルゴリズムを実装する上で、完成したシステムの総合応答時間を正確に見積もることができず、ハードウェア化することがきわめて困難であった。また、計算時間の面では、繰り返し計算の各段階で画像を補間する必要があるが、画像補間演算は演算量が多いため、多くの計算時間が必要になる。さらに、推定精度の面では、画像補間手法によって補間画像の性質が異なるので、採用する補間手法によって最終的なパラメータ推定精度や推定誤差の性質が異なる点も大きな問題であった。
【0027】
本発明は上述のような事情よりなされたものであり、本発明の目的は、N次元類似度を考慮することで、上記従来手法の問題点を解決し、画像間対応パラメータを少ない計算量で安定且つ高速に高精度に同時推定できるようにした、画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法を提供することにある。
【課題を解決するための手段】
【0028】
本発明は、画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法に関し、本発明の上記目的は、N(Nは4以上の整数である)個の画像間対応パラメータを軸とするN次元類似度空間において、離散的な位置で得られた画像間のN次元類似度値を利用して、前記N個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法であって、前記画像間のN次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似するN次元超平面を求めるステップと、前記N次元超平面を各パラメータ軸に対してN個求めるステップと、前記N個のN次元超平面の交点を求めるステップと、前記交点を前記N次元類似度空間におけるN次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップとを有するようにすることによって効果的に達成される。
【0029】
また、本発明は、画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法に関し、本発明の上記目的は、3個の画像間対応パラメータを軸とする3次元類似度空間において、離散的な位置で得られた画像間の3次元類似度値を利用して、前記3個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法であって、前記画像間の3次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する平面を求めるステップと、前記平面を各パラメータ軸に対して3個求めるステップと、前記3個の平面の交点を求めるステップと、前記交点を前記3次元類似度空間における3次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップとを有するようにすることによって効果的に達成される。
【0030】
更に、本発明は、画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法に関し、本発明の上記目的は、離散的に得られた画像間の2次元類似度値を利用して、連続領域における2次元類似度最大値または最小値の位置を高精度に推定する画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法であって、前記画像間の2次元類似度値が、水平軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(水平極値線HEL)を求めるステップと、前記画像間の2次元類似度値が、垂直軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(垂直極値線VEL)を求めるステップと、前記水平極値線HELと前記垂直極値線VELの交点を求めるステップと、前記交点を前記2次元類似度の最大値または最小値を与えるサブピクセル推定位置とするステップとを有するようにすることによって効果的に達成される。
【発明の効果】
【0031】
本発明によれば、画像間の平行移動、回転、スケール変化を同時に高精度に推定することができる。即ち、本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法によれば、画像間の対応に、平行移動があるときだけでなく、回転やスケール変化があるときにも、繰り返し計算を利用することなく、高精度にこれらの画像間対応パラメータを同時に推定することができる。本発明では、繰り返し計算を利用しないので、従来のように計算ごとに画像を補間する必要が全くない。
【0032】
また、本発明によれば、テンプレート画像を用いて少ない枚数の補間画像を作成しておき、これらの補間画像を用いた画像間の類似度値を利用して、平行移動と回転やスケール変化を同時に高精度に推定することができる。本発明は、一般的に利用されているようなパラメータ最適化手法と異なり、繰り返し計算を用いないため、計算が容易でしかも計算時間が予測可能で、繰り返し計算を行うときに問題となる収束性を保証する必要もなく、初期値による不安定性も生じない。つまり、本発明によれば、従来方法において生じる収束性の問題や初期値の問題を排除することができる。
【発明を実施するための最良の形態】
【0033】
以下、本発明の好適な実施例を図面及び数式を参照しながら説明する。
【0034】
実施例1:
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法の実施例1では、画像のサンプリング周期で求まっている2次元類似度を使って、その2次元類似度の最大値又は最小値を与える2次元サブピクセル変位(つまり、水平及び垂直方向の画像間変位)を高精度に同時に推定するようにしている。
【0035】
ここで、画像を水平方向と垂直方向に独立と考え、変位のサブピクセル推定も独立に行う従来方法を「1次元推定方法」と称するのに対して、本発明の実施例1に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法は、2次元画像から計算した離散位置における2次元類似度を使って、2次元サブピクセル推定を行なっているので、「画像のサブピクセルマッチングにおける高精度2次元推定方法」又は「2次元サブピクセル推定方法」と称し、更に、略して「2次元推定方法」と呼ぶようにしている。
【0036】
後述する本発明の実施例1に係る2次元推定方法は、領域ベースマッチングを用いた高精度同時推定方法で、従来の「1次元推定方法」と比較して計算量がわずかに増えるだけで、圧倒的に高精度な2次元サブピクセル推定が可能である。
【0037】
(1)2次元画像モデルと2次元類似度モデル
ここでは、何種類かの画像モデルをとりあげ、その2次元類似度を考える。異なる画像モデルから得られる2次元類似度が、同じ2次元類似度モデルで近似できることを示す。
【0038】
領域ベースマッチングとは、2枚の画像の類似度を評価し、その最大または最小位置を2枚の画像間の変位として求めることである。この類似度は、通常は画像のサンプリング周期と一致して、とびとびの変位位置に対して値が得られる。画素単位でのマッチングは、これらの類似度の中から、最大値または最小値を探すことに対応する。サブピクセル推定は、これらの類似度を補間して、サブピクセルでの最大値または最小値を与えるサブピクセル変位位置を推定することである。以後の説明では、「最大または最小」を単に「最大」と表現する。SADやSSD類似度を使うときには「最小」、相関類似度を使うときには「最大」を意味する。
【0039】
(1―1)コーナーモデル
まず、領域ベースマッチングとサブピクセル推定が可能な2次元画像モデルとして、1次元画像モデル
【数7】
を単純に拡張して、下記数8で示すコーナー画像を考える。ここで、σimageは濃度エッジのシャープさである。このコーナー画像を図4(a)に示す。
【数8】
ただし、画像座標系をu−v、類似度座標系(変位座標系)をs−tとする。
【0040】
上記数8で表す画像を参照画像として、また、全く同じ画像を入力画像として2次元マッチングを行ったときのSSD類似度(本発明では、SSD類似度を「自己類似度」と称することもある)は、下記数9で求めることができる。SSD類似度は、値が小さいほど類似していることを示すので、この場合には暗い場所ほど類似性が高いことを示している。自己類似度は全く同じ画像を使った類似度なので、変位(s,t)=(0,0)の位置の類似度が最も小さい。この類似度を図4(b)に示す。
【数9】
ただし、総和範囲は、任意形状の注目範囲であるが、図4(b)では11×11の矩形領域で計算した。
【0041】
図4(a)では、コーナーに剪断成分が含まれない、つまり水平方向の濃度変化が垂直位置に依存しないので、2次元画像の水平方向と垂直方向を独立に扱うことができる。このとき、上記数9の類似度も、水平方向と垂直方向を独立に扱うことができる。従って、サブピクセル変位位置を推定するときにも、水平方向と垂直方向を独立に扱うことができる。
【0042】
しかし、実際の画像では、必ずしも90度のコーナーで構成されるわけではない。例えば、建築物を地上から撮影したステレオ画像を使って3次元情報を再構成するときには、建築物のコーナー領域を、他方の画像との対応を求めるが、コーナーが90度に撮影されることはまれである(図2(a)参照)。
【0043】
そこで、v=0に濃度エッジを持つ2枚の2次元画像
【数10】
を、それぞれ左にθa、右にθbだけ回転した画像を考える。
【数11】
【0044】
このθa、θbを画像全体の回転角度θgとコーナー角度θcを使って、次のように定義する。
【数12】
【0045】
このとき、Ia(u,v)とIb(u,v)を使って表す2次元画像モデルIc(u,v)を、下記数13で定義する。
【数13】
【0046】
この2次元画像モデルは、図5に示すように、画像全体の回転角度θgとコーナー角度θcと2次元濃度エッジのシャープさσimageをパラメータに持つ。0≦θg≦π/4、0<θc≦π/2の範囲を考慮する。これ以外の範囲は、画像の左右を反転することと、濃淡を反転することで表現することができる。θg=π/4、θc=π/2のときには、上記数8の単純な画像モデルと同一である。図6(a)、(b)、(c)、(g)、(h)、(i)に、上記数13で表す画像モデルの例を示す。図6(d)、(e)、(f)、(j)、(k)、(l)に、図6(a)、(b)、(c)、(g)、(h)、(i)の2次元画像に対応した類似度を示す。
【0047】
(1―2)繰り返しテクスチャモデル
類似度に方向依存性がないとき、つまり類似度が等方性なら、サブピクセル推定を水平方向と垂直方向に独立に行っても誤差が発生しない。しかし、類似度に方向依存性があるとき(本発明では「異方性」と呼ぶ)、つまり、方向によって微分値が異なるときには、サブピクセル推定を水平方向と垂直方向に独立に行うと誤差が発生する可能性がある。
上記数13で示した2次元画像モデルIc(u,v)では、θc≠π/2のときに自己類似度に異方性が現れた。しかし、直感的に理解できるように、これ以外にも自己類似度に異方性を生じさせるテクスチャが存在する。この例として、図3(a)に示す画像のSSD自己類似度を図3(b)に示す。テクスチャに含まれるコーナーはθc=π/2なのに、類似度に異方性が現れている。
【0048】
θc=π/2なのに自己類似度に異方性を生じさせる2次元画像モデルとして、下記数14を考える。
【数14】
【0049】
上記数14の2次元画像モデルIt(u,v)は、図7に示すように、u方向空間周波数fu、v方向空間周波数fv、画像の回転角度θgをパラメータに持つ。0≦θg≦π/2の範囲を考慮する。fu≠fvのときには、自己類似度に異方性を生じる。自己類似度の異方性は、テクスチャにおける空間周波数の異方性に相当する。前節で導入した2次元画像モデルIc(u,v)は、θc≠π/2のときに、空間周波数の異方性が発生していると考えることができる。
【0050】
この2次元画像モデルとSSD自己類似度を図8に示す。
【0051】
(1―3)ガウス関数モデル
自己類似度に異方性を生じさせる2次元画像モデルとして、下記数15の2次元ガウス関数を考えることができる。
【数15】
ただし、図9に示すように、σはガウス関数の標準偏差で、kは異方性係数(k>0)で、θgは回転角度である。0≦θg≦π/2の範囲を考慮する。この2次元画像モデルとSSD自己類似度を図10に示す。
【0052】
(1―4)2次元類似度モデル
1次元サブピクセル推定と異なり、2次元サブピクセル推定では2次元画像モデルのパラメータ数が多いので、2次元画像モデルから得られるSSD類似度を直接検討することは得策ではない。ここで取り上げた画像モデルは、画像の性質の多くを含んでいるが、実際用途で扱う画像は、ここで取り上げた画像モデルを複数組み合わせたものや、より高次の画像が存在する。
【0053】
そこで、以後の検討では、これまでに検討した何種類かの画像モデルを直接使わず、代わりに、これらの画像モデルから得られる2次元類似度を近似する2次元類似度モデルを検討する。2次元類似度モデルとして、下記数16で表す2次元ガウス関数を採用する。
【数16】
ただし、(ds,dt)は画像間の真の変位で、σはガウス関数の標準偏差で、kは異方性係数(k>0)で、θgは回転角度である。0≦θg≦π/2の範囲を考慮する。
【0054】
比較のため、ここで取り上げた2次元画像モデルから得られるSSD自己類似度の例と上記数16の類似度の例を図11に示す。ただし、(ds,dt)=(0,0)、θg=0、k=1としたときに、2次元画像モデルから計算した離散的な自己類似度を最もよく近似するように、上記数16のパラメータを数値計算で求めた。
【0055】
以上の説明は、連続領域で行ってきたが、実際の画像データから得られる類似度は、画素単位でのサンプリングになっている。この様子を図12に示す。本発明の実施例1に係る2次元推定方法は、このように離散化単位で得られた2次元類似度を用いて、連続領域での類似度最大値を与える2次元変位を高精度に推定するものである。
【0056】
(2)本発明の実施例1に係る2次元推定方法
(2―1)本発明の実施例1に係る2次元推定方法の原理<連続領域での説明>
ここでは、前述した2次元類似度モデルを使って、本発明の実施例1に係る2次元推定方法の原理を説明する。本発明は、離散化単位で得られた類似度値を使って、連続領域での類似度最大値位置を高精度に推定することを特徴としている。ここでは、本発明の実施例1の原理を連続領域で説明する。
【0057】
図13は2次元類似度モデルを等高線で表示した図である。この2次元類似度モデルのパラメータは、(ds,dt)=(0.2,0.4)、σ=1.0、k=0.7、θg=π/6である。等高線は、2次元類似度モデルの最大値に対して、10%から90%までレベルを示している。2次元類似度モデルの等高線は楕円になる。この楕円の中心が、2次元類似度モデルの最大値位置である。図13(a)には、2次元類似度モデルの長軸を示してあるが、この角度が回転角度θgに相当する。
【0058】
数16の2次元類似度モデルをsで偏微分して0とおくことで、図13(b)の直線s=at+bを表す関係を得ることができる。
【数17】
【0059】
考慮する条件がk>0なので、上記数17の各係数の分母≠0である。また、2次元類似度モデルが等方性のとき、つまりk=1のとき、上記数17はs=dsとなり、推定誤差が発生しない。本発明の実施例1では、この直線を水平極値線HEL(Horizontal Extremal Line)と称する。HELは図13(b)の等高線を表す楕円と水平直線との接点を通る。
【0060】
一方、数16の2次元類似度モデルをtで偏微分して0とおくことで、図13(b)の直線t=As+Bを表す関係を得ることができる。
【数18】
【0061】
数17と同様に、各係数の分母≠0である。また、k=1のとき、数18は、t=dtとなり、推定誤差が発生しない。本発明の実施例1では、この直線を垂直極値線VEL(Vertical Extremal Line)と称する。VELは図13(b)の等高線を表す楕円と垂直直線との接点を通る。
【0062】
HELとVELの交点は、数16の2次元類似度モデルを異なる方向に偏微分したときに、どちらの方向にも0になる点であり、これは2次元類似度モデルの類似度値を最大にする位置に他ならない。実際に、この交点を計算すると、
【数19】
となり、当然のことながら2次元類似度モデルの変位(ds,dt)を表している。
【0063】
このときの分母≠0は、HELとVELが交点を持つための条件である。分母を計算すると、次のようになる。
【数20】
kの範囲はk>0なので、この分母1−aA≠0である。
【0064】
まとめると、2次元類似度のs方向微分とt方向微分は、HELとVELの2直線で表すことができ、この2直線の交点が2次元類似度の最大値位置になっている。従って、本発明の実施例1では、離散化単位で得られた類似度値を使ってHELとVELを求め、その交点を計算すれば、2次元サブピクセル推定を行うことができる。
【0065】
(2―2)本発明の実施例1に係る2次元推定方法の実装方法<離散領域への適用>
以下では、離散的に算出された画像間の類似度値を利用して、連続領域における類似度最大値位置を推定する本発明の実施例1に係る2次元推定方法を具体的に説明する。
【0066】
まず、離散的に得られている類似度値を使って、HELを求める。HELは水平方向について類似度最大値を通る直線なので、2本以上の水平ライン上でのサブピクセル類似度最大値位置が決定すれば、HELを求めることができる。この様子を図14(a)に示す。同図において、同心楕円は2次元類似度モデルの等高線を表す。同図中の□位置で離散的に得られた類似度値を使って、直線で示すHELを求める。
【0067】
図14(a)において、直線t=0上での最大類似度を与える位置を
変位位置(s,t)での類似度をR(s,t)とすると、
【数21】
【0068】
この推定結果には、前章で示したように推定誤差が含まれるが、このことについては次節で述べる。直線t=−1上と直線t=1上での最大類似度を与える位置をそれぞれ
とすると、
【数22】
【数23】
ただし、it=−1、it=1は、直線t=−1上と直線t=1上で最大類似度を与える整数位置オフセットである(後述する)。
【0069】
これら3点の最大類似度位置を通る直線がHELである。実際には、画像パターンや画像に含まれるノイズや画像間の相違などのために、これら3点は完全には直線上には乗らない可能性があるので、最小二乗で近似直線を求める。この3点を最小二乗で近似する直線は、下記数24で求めることができる。
【数24】
【0070】
次に、離散化単位で得られた類似度値を使って、VELを求める。VELは垂直方向について類似度最大値を通る直線なので、2本以上の垂直ライン上でのサブピクセル類似度最大値位置が決定すれば、VELを求めることができる。この様子を、図14(b)に示す。同図において、同心楕円は、2次元類似度モデルの等高線を表す。同図中の□位置で離散化単位で得られた類似度値を使って、直線で示すVELを求める。
【0071】
図14(b)において、直線s=0上での最大類似度を与える位置を
とすると、
【数25】
【0072】
直線s=−1上と直線s=1上での最大類似度を与える位置をそれぞれ
とすると、
【数26】
【数27】
ただし、is=−1、is=1は、直線s=−1上と直線s=1上で最大類似度を与える整数位置オフセットである。
【0073】
これら3点の最大類似度位置を通る直線がVELである。この3点を最小二乗で近似する直線は、下記数28で求めることができる。
【数28】
【0074】
HELとVELの交点、即ち、数24と数28の交点が、連続領域における2次元類似度最大値のサブピクセル推定位置
になっている。
【数29】
【0075】
ところで、数26、数27における直線t=−1上と直線t=1上で最大類似度を与える整数位置オフセットit=−1、it=1は、必ずしも0になる保証はない。例えば、図15(b)に示すのは、(ds,dt)=(0.2,0.4)、σ=1、k=0.3、θg=π/8の2次元類似度モデルだが、このモデルに対するHELを求めるための、直線t=−1上の類似度最大値はs=−2付近にある。従って、
を計算するときには、直線t=−1上と直線t=1上で最大類似度を与える整数位置を再探索する必要がある。垂直方向についても同様で
を計算するときには、直線s=−1上と直線s=1上で最大類似度を与える整数位置を再探索する必要がある。
【0076】
このとき、図15(b)に示す±3の範囲の類似度を使い、−2≦i≦+2を考慮している。この探索範囲は、多数の現実的な画像をもとに決定した範囲である。もしも、2次元類似度モデルのパラメータ範囲に制限がないとすると、このときの再探索範囲は無限になってしまう。その理由は、(ds,dt)=(0,0)のとき、数17のHELについて、下記数30のD(k,θg)を考えると、
【数30】
【0077】
D(k,θg)が最大値に近づくのは、θg→0、k→0のときで、D(k,θg)→cosθg/sinθg→∞だからである。ところで、k→0のとき、2次元類似度の異方性が無限大になり、HELとVELがほとんど一致する。もしもこのような2次元類似度を作り出す画像があったとしても、そのときには、ほとんど同一になったHELとVEL上で類似度最大値を検索すればよい。たとえば、数30でD(k,θg)→∞のときには、VEL上の3点
における類似度値を求め、パラボラフィッティングを行えばよい。
【0078】
従来の1次元推定では、図15(a)に示す5個の類似度値を用いてサブピクセル位置を推定していた。このとき、直線t=0上の3点の類似度(□印)を用いてサブピクセル推定を行って水平方向サブピクセル変位(●印)とした。また、直線s=0上の3点の類似度(□印)を用いてサブピクセル推定を行って垂直方向サブピクセル変位(●印)とした。図15(a)に示す2直線の交点が従来手法で求めた2次元サブピクセル推定値だが、大きな推定誤差を含むことがわかる。
【0079】
これに対して本発明の実施例1に係る2次元推定方法は、図15(b)に示す25個の類似度値を用いて2次元サブピクセル位置を推定する。HELとVELの交点は、正確に2次元類似度のサブピクセル最大位置を通るので、推定は極めて高精度である。さらに、本発明の実施例1に係る2次元推定方法の計算量の増加は、従来の「1次元推定方法」と比較してわずかである。領域ベースマッチングでは、大部分の計算時間は類似度値を計算しているが、本発明の実施例1に係る2次元推定方法では既に得られている類似度値を利用するので、計算時間の増加は少ない。
【0080】
(2―3)本発明の実施例1に係る2次元推定方法とサブピクセル推定誤差低減方法との組合せ
数21から数23、数25から数27において、3位置の類似度を使ってパラボラフィッティングによってサブピクセル位置を推定するときには、推定誤差が発生する。この推定誤差は、補間画像を利用することでキャンセルすることができる。
【0081】
数21から数23、数25から数27において求めているサブピクセル位置は、従来どおりの1次元推定にすぎないので、非特許文献1に記載された、推定誤差を低減できるサブピクセル推定方法(以下、本発明の実施例1に係る2次元推定方法と区別するために、非特許文献1に記載されたサブピクセル推定方法を「サブピクセル推定誤差低減方法」と称する)をそのまま適用することができる。ここでは簡単に適用方法を説明する。
【0082】
マッチングに使う2次元画像関数をI1(u,v)、I2(u,v)とするとき、水平方向補間画像I1iu(u,v)は、
【数31】
と表すことができる。ただし、このときの(u,v)は整数である。水平方向補間画像I1iu(u,v)は、I1(u,v)に対して(0.5,0)だけ変位していると考えることができる。この補間画像を使って、次に示すSSD類似度でサブピクセル推定を行うと、推定結果も(0.5,0)だけ変位していると考えることができるので、その変位を補正した推定結果は、下記数32、数33で求めることができる。
【数32】
【数33】
【0083】
数33も数21と同様に推定誤差を含むが、その位相が逆になっているので、下記数34によって推定誤差をキャンセルすることができる。
【数34】
【0084】
同様にして、水平ラインt=−1、t=1について、
【数35】
【数36】
【0085】
ただし、it=−1、it=1は、直線t=−1上と直線t=1上でRiu(s,t)の最大類似度を与える整数位置オフセットである。これらの値は、数22、数23とは異なる可能性がある。数35と数36を使って、下記数37、数38によって推定誤差をキャンセルすることができる。
【数37】
【数38】
【0086】
垂直方向についても同様である。垂直方向補間画像I1iv(u,v)は、
【数39】
と表すことができる。ただし、このときの(u,v)は整数である。垂直方向補間画像I1iv(u,v)は、I1(u,v)に対して(0,0.5)だけ変位していると考えることができる。この補間画像を使って、次に示すSSD類似度でサブピクセル推定を行うと、推定結果も(0,0.5)だけ変位していると考えることができるので、その変位を補正した推定結果は、下記数40、数41で求めることができる。
【数40】
【数41】
【0087】
数41も数25と同様に推定誤差を含むが、その位相が逆になっているので、下記数42によって推定誤差をキャンセルすることができる。
【数42】
【0088】
同様にして、垂直ラインs=−1、s=1について、
【数43】
【数44】
【0089】
ただし、is=−1、is=1は、直線s=−1上と直線s=1上でRiv(s,t)の最大類似度を与える整数位置オフセットである。これらの値は、数26、数27とは異なる可能性がある。数43と数44を使って、下記数45、数46によって推定誤差をキャンセルすることができる。
【数45】
【数46】
【0090】
数34、数37、数38、数42、数45、数46で計算した各ライン上のサブピクセル推定値は、従来の1次元推定方法によって推定されたサブピクセル推定値と比較して、推定誤差が低減されている。従って、サブピクセル推定誤差低減方法によって推定されたこれらの推定結果を使って、更に本発明の実施例1に係る2次元推定方法で2次元サブピクセル推定を行うことで、より高精度な2次元サブピクセル推定が可能になる。
【数47】
補間画像は、水平方向と垂直方向にそれぞれ1回ずつ作ればよいので、計算量の増加は1次元推定と同程度である。
【0091】
(3)本発明の実施例1に係る2次元推定方法による推定誤差と従来の推定方法による推定誤差との比較
以下では、2次元画像間の変位推定で、従来一般的に使用されている各種推定方法による推定誤差を本発明の実施例1に係る2次元推定方法による推定誤差と比較する。前述した2次元画像を使用して推定誤差を比較することで、同じ画像に対する比較を行う。
【0092】
2次元サブピクセル推定誤差は、水平方向と垂直方向の推定誤差を考える必要がある。ところが、推定誤差に影響するのは、2次元画像が持つ3パラメータと画像間の2次元入力変位の合計5パラメータになるので、全てを網羅することは困難である。そこで、代表的な2次元画像を用いて、各方法による推定誤差を比較する。
【0093】
(3―1)本発明の実施例1に係る2次元推定方法
代表的な2次元画像として、前述したコーナー画像を使用し、パラメータとしてθg=0,π/8,π/4、θc=π/4、σimage=1.0を考える。0≦θg≦π/4以外の2次元画像は、画像の左右を反転することと、濃淡を反転することで表現することができるが、実際の検討は、さらに多くの2次元画像、回転角度、コーナー角度を用いて行っている。他の2次元画像でも、2次元類似度が同じような形になるときには、サブピクセル推定誤差は同じ傾向を示す。
【0094】
サブピクセル推定誤差低減方法を適用した本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortは、数47を使って、下記数48で表すことができる。
【数48】
【0095】
サブピクセル推定誤差低減方法を適用しないときの本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortは、数29を使って、下記数49で表すことができる。
【数49】
【0096】
θg=0,π/8,π/4の3画像に対する数48、数49の2次元サブピクセル推定誤差を、それぞれ図16、図17、図18の(c)(d)、(e)(f)に示す。(c)と(d)は、それぞれサブピクセル推定誤差低減方法を適用した本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortを示す。(e)と(f)は、それぞれサブピクセル推定誤差低減方法を適用しないときの本発明の実施例1に係る2次元サブピクセル推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0097】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じているにもかかわらず、サブピクセル推定誤差は極めて小さい。
【0098】
(3―2)従来の1次元サブピクセル推定方法
従来の1次元推定方法は、数21と数25で求めることができる。また、非特許文献1に記載されたサブピクセル推定誤差低減方法を適用した推定値は、数34と数42で求めることができる。ここでは、数21と数25を使ったときの推定誤差を比較検討する。
【数50】
【0099】
θg=0,π/8,π/4の3画像に対する上記数50のサブピクセル推定誤差を、それぞれ図16、図17、図18の(g)、(h)に示す。(g)と(h)は、それぞれ従来の1次元推定方法における水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0100】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。このときには、従来の1次元推定方法でも推定誤差が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じるが、このときには大きな推定誤差が生じる。推定誤差の大きさは、異方性を持つ2次元類似度の回転角度と真の画像間変位に依存する。
【0101】
(3―3)従来の濃度こう配法によるサブピクセル推定
濃度こう配法では、画像間における対応位置に濃度変化がないことを仮定して、水平方向移動量と垂直方向移動量の2つの未知数を含む拘束条件を画素ごとに得る。したがって、この2つの未知数はこのままでは求めることができないため、注目領域を設定し、注目領域中での拘束条件の2乗和を最小にするように、繰り返し計算によって未知数を求める。このようにして得られる変位量には画素単位という制約がなく、サブピクセル単位を得ることができる。
【0102】
一方、画像補間手法では、注目領域と周囲の探索領域を離散化単位よりも密に補間する。密に補間した単位で、類似度最大値を探索する。このときには、濃度こう配法と異なり、画像間の移動量に対する制限はない。
【0103】
この2種類のサブピクセル変位推定方法は、全く異なる実装に見え、異なる手法として扱われていたが、本質的に同一のものであることが示されている(非特許文献5を参照)。ここでは、補間画像を作るときに用いる補間関数の次数によってサブピクセル変位推定誤差が変化する様子を確認する。そこで、1次補間を利用した補間画像によるサブピクセル推定結果を、濃度こう配法による結果と見なす。さらに、高次の補間関数を利用した補間画像によるサブピクセル推定結果も検討する。
【0104】
(3―4)従来のバイリニア画像補間によるサブピクセル推定
サブピクセル変位を求める2枚の画像をI1(u,v)、I2(u,v)とする。これらの画像は離散化サンプリングされているとする。すなわち、u,vは整数である。また、画像間の変位を(ds,dt)としたときに、0≦ds≦1、0≦dt≦1とする。画像間の真の変位がこの範囲にないときには、画素単位のマッチングによって画像全体を移動する。
【0105】
バイリニア補間(2方向1次補間)を利用したサブピクセル推定値
は、下記数51で表すことができる。
【数51】
ただし、総和範囲は任意形状の注目領域、argminは値を最小にするような
の組を求める演算を表す。
【0106】
θg=0,π/8,π/4の3画像に対する上記数51のサブピクセル推定誤差を、それぞれ図16、図17、図18の(i)、(j)に示す。(i)と(j)は、それぞれ水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0107】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。このときには、推定誤差が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じるが、このとき推定誤差が生じる。推定誤差の大きさは、異方性を持つ2次元類似度の回転角度と真の画像間変位に依存する。
【0108】
この推定誤差は、図16、図17、図18の(c)、(d)の結果よりも大きい。すなわち、本発明の実施例1に係る2次元推定方法は、従来のバイリニア補間によるサブピクセル推定方法よりも高精度に変位を推定することができる。バイリニア補間によるサブピクセル推定方法は濃度こう配法と等価なので、本発明の実施例1に係る2次元推定方法は、従来の濃度こう配法よりも高精度にサブピクセル変位を推定することができるとも言える。
【0109】
また、濃度こう配法に相当する推定誤差は、図16、図17、図18の(g)、(h)の1次元推定方法の結果よりもはるかに小さい。すなわち、従来広く利用されてきた、領域ベースマッチングを画素単位で行い、サブピクセル変位は類似度を利用して1次元推定する手法より、濃度こう配法ははるかに高精度に2次元サブピクセル変位を推定することができる。このため、領域ベースマッチングよりも濃度こう配法の方が高精度という認識があったが、本発明の実施例1に係る2次元推定方法を用いることで、濃度こう配法よりもさらに高精度にサブピクセル変位を推定することができる。
【0110】
(3―5)従来のバイキュービック画像補間によるサブピクセル推定
補間画像を作るときに、より高次の項まで考慮することで、高精度な補間画像を作ることができる。バイキュービック補間(2方向3次補間)は、補間したいサブピクセル画素位置の周囲4×4の画素値を使う補間方法である。バイキュービック補間を利用したサブピクセル推定値
は、下記数52で表すことができる。
【0111】
【数52】
ただし、総和範囲は任意形状の注目領域、argminは値を最小にするような
の組を求める演算を表す。このとき、重み関数h(x)は、sinc関数をもとに各種提案されていて、下記数53が多く用いられている。
【0112】
【数53】
ただし、aは調整パラメータで、a=−1やa=−0.5がよく用いられる。
【0113】
また、下記数54も多く用いられる。
【数54】
B、Cは調整パラメータで、B=1、C=0のときにはキュービックBスプラインを近似し、B=0、C=0.5のときにはCatmull−Romキュービック特性になる。このように、重み係数の選び方によって補間特性が異なる。ここでは、数53の重み関数において、パラメータa=−0.55を採用した。ただし、画像処理の教科書等に最も多く紹介されているのはa=−1である。両者の特性の差については後述するが、a=−0.55はサブピクセル推定誤差を小さくするように数値的に決定した。
【0114】
θg=0,π/8,π/4の3画像に対する数52のサブピクセル推定誤差を、それぞれ図16、図17、図18の(k)、(l)に示す。(k)と(l)は、それぞれ水平方向推定誤差errorsと垂直方向推定誤差errortを示す。
【0115】
図16は、θg=0の画像を使った結果を示すが、このときには2次元類似度に異方性が生じない。このときには、推定誤差が生じない。図17と図18は、それぞれθg=π/8とπ/4の画像を使った結果を示し、このときには2次元類似度に異方性が生じるが、このとき推定誤差が生じる。推定誤差の大きさは、異方性を持つ2次元類似度の回転角度と真の画像間変位に依存する。
【0116】
この推定誤差は、図16、図17、図18の2次元推定(c)、(d)の結果と同程度である。すなわち、本発明の実施例1に係る2次元サブピクセル推定方法は、最適なパラメータを選択したときの高次補間画像を使ったサブピクセル推定と同程度の高精度であるということができる。
【0117】
ところで、数53におけるパラメータaについて、具体的な計算例を示して説明する。数53は、sinc関数を有限範囲で近似した重み係数と考えることができる。パラメータaは、その近似特性を調節するものである。図19(a)、(b)に、a=−0.55のときのh(x)と、整数位置に値を持つ1次元関数f(i)の補間結果を示す。f(i)は、数7でσimage=0.7としたものである。また、図19(c)、(d)に、a=−1.0のときのh(x)と、整数位置に値を持つ1次元関数f(i)の補間結果を示す。
【0118】
a=−1.0は、多くの画像処理の教科書などでバイキュービック補間として紹介されるパラメータである。sinc関数を良く近似しているが、少なくともここで検討した関数f(i)を良好に補間しているとは言い難い。a=−0.55は、sinc関数の近似としてはそれほど良くないが、関数f(i)を良好に補間している。
【0119】
図16から図18では、パラメータa=−0.55を用いたが、この値はサブピクセル推定誤差を小さくするように数値的に求めた結果である。a=−0.5を用いるとバイリニア補間の結果と同程度、a=−1.0を用いるとバイリニア補間を用いたサブピクセル推定結果よりも誤差が大きくなる。
【0120】
(3―6)各方法による推定誤差の総合比較
以下では、2次元画像のパラメータをより広範囲に変更して、各手法のサブピクセル推定誤差を比較検討する。2次元画像は、前述したコーナー画像を使用する。考慮するパラメータとして、回転角度をθg=0,π/16,2π/16,3π/16,4π/16、コーナー角度をθc=π/4,π/3を考える。合計10種類の2次元画像に対する推定誤差を検討する。また、σimage=1.0を考える。
【0121】
画像間変位は、−0.5≦ds≦+0.5、−0.5≦dt≦+0.5の範囲で、0.1[画素]ごとに与える。このとき、2次元推定誤差の大きさ、
のRMS誤差を評価した。
【0122】
評価したサブピクセル推定方法は、前述した各方法の他に、従来の1次元推定方法に対するサブピクセル推定誤差低減方法を適用した推定結果も評価した。したがって、
・サブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)
・サブピクセル推定誤差低減方法を用いない本発明の実施例1に係る2次元推定(2D)
・サブピクセル推定誤差低減方法を用いた1次元推定(1D−EEC)
・サブピクセル推定誤差低減方法を用いない1次元推定(1D)
・バイリニア補間を用いた2次元推定(Bi−Linear)
・バイキュービック補間を用いた2次元推定(a=−0.55)(Bi−Cubic)
の6種類の推定方法の推定誤差を評価した。評価した結果を表1に示す。
【0123】
【表1】
【0124】
表1から次のことが分かった。
まず、サブピクセル推定誤差低減方法を用いた1次元推定(1D−EEC)は、回転角度θg=0のときには、従来の1次元推定(1D)に対して推定誤差を低減できる。しかし、回転角度θg≠0のときには差が現れない。回転角度θgは、異方性がある類似度の回転角度に対応する。
【0125】
次に、バイリニア補間(Bi−Linear)やバイキュービック補間(Bi−Cubic)を用いた2次元推定は、1次元推定(1D)に対して推定誤差が2桁程度小さい。この差は歴然である。バイリニア補間(Bi−Linear)を用いた2次元推定は、濃度こう配法に対応する。濃度こう配法が高精度にサブピクセル推定ができると考えられてきた理由はここにある。
【0126】
それから、バイキュービック補間(Bi−Cubic)を用いた2次元推定は、バイリニア補間(Bi−Linear)を用いた2次元推定よりも高精度である。しかし、重み関数のパラメータによって結果は異なる。重み関数のパラメータを調整するということは、補間フィルタの特性を調整することに対応する。すなわち、画像に対して適切な補間フィルタを選択することで、画像補間を用いたサブピクセル推定手法では精度を向上させることができる。
【0127】
最後に、サブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)は、バイキュービック補間(Bi−Cubic)を用いた2次元推定よりも推定誤差が小さく、しかも、パラメータ調整の必要がない。サブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)は、サブピクセル推定誤差低減方法を用いない本発明の実施例1に係る2次元推定(2D)よりも計算コストが大きい。そこで、計算コストを重視して推定結果は濃度こう配法と同程度でよいときにはサブピクセル推定誤差低減方法を用いない本発明の実施例1に係る2次元推定(2D)を利用し、さらに高精度な推定結果を得たいときにはサブピクセル推定誤差低減方法を用いた本発明の実施例1に係る2次元推定(2D−EEC)を利用する、という使い分けも可能である。
【0128】
(4)本発明の実施例1に係る2次元推定方法を実装したコンピュータ・プログラムによる推定実験
本発明の実施例1に係る2次元推定方法を実装したコンピュータ・プログラムを、CPUを備えた情報処理端末(例えば、パソコン、ワークステーション等のコンピュータ)に実行させることによって、合成画像及び実画像を用いて、2次元サブピクセル推定実験を行った。なお、本発明でいうコンピュータ・プログラムは、便宜上プログラムと略して称することもある。
【0129】
(4―1)合成画像を使った推定実験
前述したコーナー画像を作り、2次元サブピクセル推定実験を行った。作成した合成画像は、8bitモノクロ画像で、画像サイズが64×64[画素]で、注目範囲が11×11[画素]である。画像にノイズは含まれない。画像のパラメータは、σimage=1.0、コーナー角度θc=π/4、回転角度θg=0,π/8,π/4である。画像間変位は、−0.5≦ds≦+0.5、−0.5≦dt≦+0.5の範囲で、0.1[画素]ごとに与えた。
【0130】
図20に従来の1次元推定と、サブピクセル推定誤差低減方法を適用した本発明の実施例1に係る2次元推定についての結果を示す。図20において、計算結果をメッシュで、実験結果を●で表す。実験結果と計算結果との相違の原因は、画像が8bit量子化階調(256階調)であることが考えられる。また、大きく段差がある部分は、整数での最大類似度を探索した結果が隣の画素位置に移動してしまったためと考えることができる。このように隣の位置に移動してしまうことは、従来の1次元推定方法の根本的な欠点である。
【0131】
(4―2)実画像を使った推定実験
マッチングに利用する画像から得られる2次元類似度の回転角度θg≒0のときには、従来の1次元推定方法でも推定誤差は発生しないが、θg≠0のときには、大きな推定誤差が生じる可能性がある。そこで、マッチングパターンとして2種類のパターンを用いたターゲットトラッキング実験を行った。
【0132】
使用したマッチングパターンは、円形パターンと傾いたエッジパターンである。これらのパターンを図21(a)、(e)に示す。円形パターンの大きさは、直径が約41[画素]である。また、これらのパターンのSSD自己類似度を図21(b)、(f)に示す。
【0133】
円形パターンの自己類似度は等方性なので、従来の1次元推定方法と本発明の実施例1に係る2次元推定方法のどちらでも、推定誤差が小さいことが予想できる。一方、傾いたエッジパターンに対応する自己類似度は異方性でかつ傾いているので、従来の1次元推定方法では推定誤差が大きく、本発明の実施例1に係る2次元推定方法では推定誤差が小さいことが予想できる。
【0134】
マッチングパターンを厚紙に印刷して、トラッキングターゲットとした。ターゲットは、ネジ送り式リニアステージ上を直線的に移動する。ターゲットの移動を約250枚の時系列画像で撮影し、最初の画像を参照パターンとして使い、以後の画像中からターゲットをトラッキングした。注目領域サイズは60×60[画素](図21(a)、(e)中の黒い矩形領域)で、探索領域は移動予測位置に対して±8(17×17)である。ターゲットは画像上で右下方向にゆっくり移動する。マッチングが正しくでき、サブピクセル推定に誤差がなければ、計測軌跡は直線になる。従来の1次元推定方法と本発明の実施例1に係る2次元推定方法のどちらにもSSD自己類似度を使用し、サブピクセル推定誤差低減方法を適用したパラボラフィッティングによるサブピクセル推定を行った。
【0135】
図21(c)、(d)に、トラッキングパターンとして円形パターン使ったときの計測結果を示す。図21(c)は従来の1次元推定方法、図21(d)は本発明の実施例1に係る2次元推定方法を使った結果である。どちらの場合も、サブピクセル推定誤差が小さく、軌跡は良好な直線になっている。
【0136】
図21(g)、(h)に、トラッキングパターンとして傾いたエッジパターン使ったときの計測結果を示す。図21(g)は従来の1次元推定方法、(h)は本発明の実施例1に係る2次元推定方法を使った結果である。従来の1次元推定方法では、非常に大きなサブピクセル推定誤差が発生していることが明らかである。
【0137】
本発明の実施例1に係る2次元推定方法では、トラッキングパターンによらず推定誤差が小さいが、円形パターンのときよりも計測軌跡が直線から外れている。この理由は、2次元類似度が2次元ガウスモデルと異なるため、HELとVELを直線近似するときに誤差が含まれることが原因と考えられる。
【0138】
現実的には、このようなトラッキングパターンを利用することはまれである。しかし、この実験は、従来の1次元推定方法を使うと、マッチングパターンによっては、予想外に大きなサブピクセル推定誤差が発生する可能性があることを示している。この実験では、対象が直線上を移動していることがわかっているので、サブピクセル推定誤差を確認することができた。しかし、たとえば、異なる方向から撮影した複数の画像を使って、建築物の3次元情報を再構築するときなどには、傾いたエッジパターンの領域をマッチング領域として利用することもある。従来の1次元推定方法では、このようなときに大きな推定誤差が発生するという問題点があった。
【0139】
なお、本発明の実施例1では、水平極値線HELと垂直極値線VELを求める際、3点を最小二乗で近似する直線を求める代わりに、3点を通る2次曲線として求めることにより、直線近似による誤差を低減するように本発明の実施例1に係る2次元推定方法を拡張することもできる。
【0140】
実施例2及び実施例3:
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法の実施例2及び実施例3を次のように説明する。本発明の実施例2及び実施例3の着眼点は以下の通りである。
【0141】
(A)平行移動と回転、または、平行移動と回転とスケール変化を画像間対応パラメータ(本発明では、略してパラメータとも呼んでいる)にして、これらのパラメータを軸とする多次元空間(本発明では、パラメータ空間或いは多次元類似度空間とも称する)において離散的な位置で得られた類似度を利用する。類似度は離散的な位置で計算しておけばよいので、繰り返し計算の必要がない。
【0142】
(B)離散的な位置で得られた類似度は、多次元空間(つまり、パラメータ空間)における連続関数である類似度をサンプリングしたものであると考える。
【0143】
(C)現実的な仮定の下に類似度をモデル化したとき、多次元空間における各軸(つまり、パラメータ空間における各パラメータ軸)で類似度を偏微分して0とおくことで得られる超平面は、類似度の最大値または最小値を通る。例えば、類似性評価関数にSADやSSDが採用された場合に、超平面は類似度の最小値を通る。また、類似度評価関数にZNCCが採用された場合に、超平面は類似度の最大値を通る。
【0144】
(D)このような超平面は、多次元空間の軸の数(つまり、パラメータ数)だけ求めることができる。これらの超平面の交点座標は、多次元空間における類似度の最大値または最小値を与えるパラメータと一致するため、これらの超平面の交点座標を求めることで、多次元空間における類似度の最大値または最小値を与えるパラメータを同時に求めることができる。
【0145】
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法は、サンプリンググリッドで離散的に得られた評価値を使って、高精度なサブサンプリンググリッド精度の評価値最大位置または最小位置を推定する方法と考えることができる。
【0146】
画像間の対応を平行移動のみに限定して考えるとき(つまり、本発明の実施例1の場合)には、このサンプリンググリッドは画像を構成する画素に相当する。このため、画素単位以上に高精度な平行移動量の表現として、サブピクセルという表現が適切だった。従って、前述したように、本発明の実施例1に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法を「2次元サブピクセル推定方法」とも呼んでいる。
【0147】
しかし、平行移動と回転、または、平行移動と回転とスケール変化を画像間対応パラメータにする場合の本発明、つまり、本発明の実施例2及び実施例3に係る多パラメータ高精度同時推定方法では、画素やサブピクセルといった表現は一般性を欠いているので、以後ではそれぞれサンプリンググリッド、サブサンプリンググリッドという表現を採用する。
【0148】
<1>実施例2に係る3パラメータ同時推定方法
<1−1>3パラメータ同時推定方法の原理
ここでは、本発明の実施例2に係る3パラメータ同時推定方法の原理を説明する。本発明では、画像間の対応を探索するときには、何らかの類似度評価関数を利用して、類似度評価関数の最小または最大を探索する。このとき得られる類似度は、用いる類似度評価関数によっても異なるが、それ以上に入力として扱う画像によって異なる。
【0149】
ここでは、具体的な入力画像や類似度評価関数には触れず、画像間の類似度を次の3次元ガウス関数で近似して、これを3次元類似度モデルとする。
【数55】
ただし、(s1,s2,s3)は探索パラメータ(つまり、画像間対応パラメータ)で、σはガウス関数の標準偏差で、(k2,k3)は異方性係数(k2,k3>0)である。また、(t1,t2,t3)は、次のように(s1,s2,s3)に対して回転と平行移動を行った結果である。
【0150】
【数56】
ただし、(d1,d2,d3)は探索パラメータ(s1,s2,s3)の正解値で、(θ1,θ2,θ3)はそれぞれ(s1,s2,s3)の各軸回りの回転角度で、0≦θ1,θ2,θ3≦π/2の範囲を考慮する。
【0151】
この3次元類似度モデルをs1,s2,s3で偏微分して0とおくと、次の3平面を得ることができる。
【数57】
【数58】
【数59】
【0152】
Π1,Π2,Π3は、3次元空間内(つまり、s1,s2,s3を軸とするパラメータ空間)の3平面を構成している。この3平面の交点は、明らかに(d1,d2,d3)であり、正解パラメータと一致する。3平面の交点が求まらない条件は、3次元類似度モデルが3次元未満に縮退した場合である。このような条件では、k2,k3=0または∞となり、3次元類似度モデルの条件と一致しない。
【0153】
<1−2>3パラメータ同時推定方法の実装
以下では、3パラメータ同時推定方法において、サブサンプリンググリッド推定値を求める具体的な方法を説明する。例えば、この3パラメータは、平行移動量(ds,dt)と回転角度θと考えることができる。
【0154】
前節『3パラメータ同時推定方法の原理』で示したように、パラメータ空間における類似度値を各パラメータ軸に関して微分して0とおくことで、各パラメータの最大値位置または最小値位置を通る3平面を作ることができる。従って、サンプリンググリッドにおいて得られた類似度値を用いて、この3平面を推定することができれば、各パラメータの類似度値の最大位置または最小位置をサブサンプリンググリッドにおいて求めることができる。
【0155】
まず、平面Π1の求め方を説明する。平面Π1上の点は、s1軸に沿って類似度を微分した結果が0になる点だから、s1軸に平行な直線上の類似度値を使ってサブサンプリング位置を推定することで、平面Π1上の点をいくつか求めることができる。図22はパラメータ軸s1に関する最大値を通る平面Π1を説明するための模式図である。図22では、類似度値が得られているサンプリング位置を正方形で、s1軸に平行な直線上で求めたサブサンプリング推定位置を黒丸で示している。類似度値のグリッド単位最大値位置は、(r1,r2,r3)である。
【0156】
(s1,s2,s3)における類似度値をR(s1,s2,s3)とすると、R(r1+i1,r2+i2,r3+i3)(i1,i2,i3=−1,0,1)の27点の類似度値を使って、平面Π1上の9個の点(p1(r2+i2,r3+i3),r2+i2,r3+i3)を推定することができる。推定には、次のパラボラフィッティングを用いることができる。
【数60】
【0157】
また、後述するように、パラボラフィッティングによる推定誤差を低減する手法を適用することもできる。
【0158】
数60のパラボラフィッティングを行うときには、R(r1,r2+i2,r3+i3)の類似度値が最大であることを前提としているが、画像パターンによってはこの前提が成立しない場合もある。たとえば、画像に含まれるテクスチャのせん断変形が極端なときには、i2=i3=±1の位置でR(r1,r2+i2,r3+i3)が最大値にならないことがある。このときにも(r2+i2,r3+i3)を通りパラメータ軸s1に平行な直線上でサブサンプリンググリッド推定位置を求める必要がある。この場合には、この直線上のサンプリンググリッド上に求まっている類似度値の最大値位置を探索し、修正最大値位置r1’に関して数60のパラボラフィッティングを行えばよい。
【0159】
以後の説明では、数式表記を簡略化するために、s1−r1→s1,s2−r2→s2,s3−r3→s3のように各パラメータ軸に沿って(r1,r2,r3)だけ平行移動して(r1,r2,r3)をパラメータ軸の原点位置と考える。このような平行移動は、グリッド単位での類似度最大位置を原点に移動することと等しく、本発明に関する一般性を失うものではない。本発明に係る多パラメータ高精度同時推定方法によって求めたサブサンプリンググリッド位置を最終的に(r1,r2,r3)と加算することで、平行移動する前のサブサンプリンググリッド位置を簡単に計算することができる。
【0160】
平面Π1上にあると期待される9点のサブサンプリンググリッド位置は、実際の画像ではノイズや画像間の変形の影響で、完全には平面上にない可能性がある。このため、これらの9点を最小二乗法によって平面Π1にあてはめる。具体的には、9点と平面Π1とのs1軸の沿った距離の2乗和を最小にするように係数を決めればよい。平面Π1は、次のように求めることができる。
【0161】
【数61】
となる。同様にして、平面Π2,Π3は、次のように求めることができる。
【0162】
【数62】
【数63】
【0163】
平面Π1,Π2,Π3の交点
が、サブサンプリング推定位置で、次のように求めることができる。
【数64】
【数65】
【0164】
<2>実施例3に係るNパラメータ同時推定方法
<2−1>Nパラメータ同時推定方法の原理
ここでは、本発明の実施例3に係るNパラメータ同時推定方法の原理を説明する。パラメータ数が3より多いときにも、本発明では同様の考え方でサブサンプリンググリッド高精度同時推定をすることができる。s1からsNまでのN個のパラメータによって類似度値が決定するときに、類似度値を次のようにガウス関数のn個の乗算として表現する。
【0165】
【数66】
ただし、
はN次元類似度空間における座標を表すN次元ベクトルで、
はN次元空間での回転と平行移動を表す行列で、
はガウス関数の異方性係数ベクトル(N−1次元)である。
【0166】
このとき、数66で表されるN次元類似度モデルをsi(i=1,2,…,N)で偏微分して0とおくことで、次のようなN個のN次元関係式を得ることができる。
【数67】
【0167】
これらの関係式を連立させて解くことで、N次元類似度のサブサンプリンググリッド推定値を得ることができる。つまり、それらの関係式の解は、N次元類似度のサブサンプリンググリッド推定値になるわけである。なお、N次元類似度モデルが数66のガウス関数乗算モデル近似からずれると、数67は完全な超平面にはならないが、このときには、最小二乗法などで超平面に近似すればよい。
【0168】
<2−2>Nパラメータ同時推定方法の実装
以下では、Nパラメータのサブサンプリンググリッド同時推定を実際に行う具体的な方法を説明する。まず、サブサンプリンググリッド同時推定を行うときに、前提としてサンプリンググリッドでの類似度最大位置はわかっており、その(変位)位置を
とする。
【0169】
類似度値Rをパラメータ軸si(i=1,2,…,N)について偏微分した結果が0になるN次元超平面Πi上には、siパラメータ軸と平行な直線上の類似度値
の3つの値をパラボラフィッティングによってサブサンプリンググリッド推定した3N−1個の位置、
が存在する。ただし、
【数68】
である。
【0170】
ここで、
は、i番目の要素だけが値k(k=−1,0,+1)であり、他の要素は全て値0であるようなN次元ベクトルである。たとえば、
である。また、
は、i番目の要素が0で、他の各要素は、−1,0,1のいずれかの値をとるようなj番目(j=1,2,…,3N−1)のN次元ベクトルである。たとえば、
である。
【0171】
これらの3N−1個の位置、
は、N次元超平面Πi上に存在するか、少なくとも最小二乗の意味でN次元超平面Πiにフィットする。従って、N次元超平面Πiを
【数69】
と表すと、3N−1個の位置、
に対して、
【数70】
の関係が得られる。これを、次のように書き換える。
【0172】
【数71】
ただし、
は、3N−1行N列の行列で、
は要素数Nのベクトルである。N次元超平面Πiを表す係数
は、一般化逆行列を用いた最小二乗法によって、次のように求めることができる。
【0173】
【数72】
このようにして求めたN個のN次元超平面Πi(i=1,2,…,N)の交点として、Nパラメータのサブサンプリンググリッド推定値を得ることができる。この交点は、次のように求めることができる。
【0174】
【数73】
【数74】
【0175】
以上の方法でNパラメータの同時推定を行うことができるが、実際にはN次元超平面Πiの式を、同じN個の未知数を含む次のような形式に表現してもよい。
【数75】
【0176】
その理由は、N次元類似度関数がN次元対称になっても安定に超平面の交点が存在するようにするためである。
【0177】
また、N次元超平面Πi上の3N−1個の位置を求めることでN次元超平面の係数を求めたが、この個数を減らすこともできる。たとえば、N=3のときには3N−1=9だが、たとえばj=3のときには、具体的に次のようになっている。
(−1,−1,0) (0,−1,0) (+1,−1,0)
(−1,0,0) (0,0,0) (+1,0,0)
(−1,+1,0) (0,+1,0) (+1,+1,0)
【0178】
この中から、次のような組を採用することで、個数を2(N−1)+1個にすることができる。
(0,−1,0)
(−1,0,0) (0,0,0) (+1,0,0)
(0,+1,0)
【0179】
<3>本発明による実験結果と従来手法による実験結果との比較
図23に示す時系列画像を人工的に作成した。この時系列画像は、濃淡で表現した2次元ガウス関数で構成されている。この実験で用いた2次元ガウス関数には方向性(異方性) があり、しかもその方向性が0または90度以外の方向になるように設定されている。このため、この画像から計算する類似度にも異方性があり、かつ回転角度が0または90度以外になる。
【0180】
図23に示す画像は時系列画像の最初のフレームで、以後のフレームは最初のフレームに対して位置が変化せず回転角度だけがフレームごとに0.1度ずつ変化する。時系列画像は全部で31フレームあり、最終フレームは先頭フレームに対して3度回転した画像になっている。これに対して画像の位置は回転中心に対して移動しない。
【0181】
図24に、最初のフレームに対する以後のフレームの回転角度を計測した結果を示す。+印で示す従来方法は、画像を6×6=36個の領域に分割し、各小領域ごとに平行移動量をマッチングによって計測し、得られた平行移動量を使って回転角度を推定した結果である。○印で示す本発明による方法は、従来方法で計測した回転角度を初期推定値として本発明を適用し、さらに高精度に回転角度を計測した結果である。フレームごとに0.1度ずつ回転角度が変化する状況が正確に計測できている。
【0182】
図25に、最初のフレームに対する以後のフレームの位置を計測した結果を示す。+印で示す従来方法は、画像を6×6=36個の領域に分割し、各小領域ごとに平行移動量をマッチングによって計測し、得られた平行移動量の平均として位置を推定した結果である。○印で示す本発明による方法は、従来方法で計測した位置を初期推定値として本発明を適用し、さらに高精度に位置を計測した結果である。位置が変化しない状況が正確に計測できている。
【0183】
<4>本発明の他の実施例
本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法の他の実施例を以下のように説明する。
【0184】
<4−1>サブピクセル推定誤差低減方法との組み合わせ
数60でサブサンプリンググリッド推定位置を求めるときに、3位置の類似度を使ってパラボラフィッティングを用いているので、この推定値には固有の推定誤差を含んでいる。この推定誤差は、補間画像を利用することでキャンセルすることができる。ここでは、2パラメータのときに画像間の水平方向変位に関するサブピクセル位置を推定するときを例に説明する。
【0185】
マッチングに使う2次元画像関数をI1(u,v),I2(u,v)とするとき、SSDとパラボラフィッティングによって推定する水平方向サブピクセル位置は、次のように表すことができる。
【数76】
【数77】
【0186】
一方、画像I1(u,v)の水平方向補間画像I1iu(u,v)は、
【数78】
と表すことができる。ただし、このときの(u,v)は整数である。
【0187】
水平方向補間画像I1iu(u,v)は、I1(u,v)に対して(0.5,0)だけ変位していると考えることができる。この補間画像を使って、次に示すSSD類似度でサブピクセル推定を行うと、推定結果も(0.5,0)だけ変位していると考えることができるので、その変位を補正した推定結果は、次式で求めることができる。
【数79】
【数80】
【0188】
数78も数60と同様に推定誤差を含むが、その位相が逆になっているので、次式によって推定誤差をキャンセルすることができる。
【数81】
【0189】
<4−2>アフィンパラメータ推定
画像間の対応がアフィン変換で表現できるとき、下記数82の変形モデル中の6個のパラメータを決定する必要がある。
【0190】
【数82】
ただし、(u1,v1),(u2,v2)は、それぞれ画像I1,I2を表す座標で、画像I2を変形して画像I1に合わせている。
【0191】
離散的な位置で得られた類似度値を用いて、この6つのパラメータを同時に高精度に推定することができる。
【0192】
<4−3>射影パラメータ推定
画像間の対応が射影変換で表現できるとき、下記数83の変形モデル中の8個のパラメータを決定する必要がある。
【0193】
【数83】
ただし、(u1,v1),(u2,v2)は、それぞれ画像I1,I2を表す座標で、画像I2を変形して画像I1に合わせている。
【0194】
離散的な位置で得られた類似度値を用いて、この8つのパラメータを同時に高精度に推定することができる。
【0195】
<4−4>高速探索手法との組み合わせ
本発明によるサブサンプリンググリッド推定方法は、サンプリンググリッド単位での対応が正しく得られた後の高精度化処理と考えることもできる。したがって、サンプリンググリッド単位での探索には、すでに提案されている各種の高速化手法を用いることができる。
【0196】
例えば、画像の濃度情報を利用した高速探索手法としては、画像ピラミッドを用いた階層構造探索法、SSDやSADに上限値を設けて以後の積算を打ち切る手法などがある。また、画像の特徴を利用する高速探索方法としては、注目領域の濃度ヒストグラムを利用する方法などがある。
【0197】
なお、本発明に係る画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法を実装したコンピュータ・プログラムを、CPUを備えた情報処理端末(例えば、パソコン、ワークステーション等のコンピュータ)に実行させることによって、合成画像或いは実画像を用いて、多パラメータを同時に高精度に推定することができる。
【産業上の利用可能性】
【0198】
以下のように、本発明を色々な画像処理分野に適用することができる。例えば、リモートセンシングや航空写真を使った地図作製では、複数の画像をつなぎ合わせること、つまりモザイキングを行うことが多い。このとき、画像間の対応位置を求めるために、領域ベースのマッチングを行う。このときには、対応が正しいことはもちろん、対応が画素単位より細かな分解能で求まることが重要になう。さらに、多数の画像を利用して対応を求めるので、計算の高速性も重要である。領域ベースマッチングを使って画素分解能以上の対応を求めるときには、画素単位のとびとびの位置で求まる類似度評価値を使って、フィッティング関数によるサブピクセル推定を行っているが、このときに本発明を適用することで、計算時間の増加がわずかで、はるかに高精度な対応位置を求めることができる。
【0199】
特に、画像パターンに斜め成分が含まれるとき、つまり、地図作製などで道路交差点などのパターンが画像座標系に対して傾いて撮影されているときに、本発明の効果が一層発揮される。
【0200】
また、ステレオビジョンでは、複数枚の画像間の対応位置を求めることが基本的な処理であり、このときの対応位置精度が最終的な結果精度に大きく影響を及ぼす。画像間の対応位置を求めるときには、エピポーラ拘束などの拘束条件を利用するが、エピポーラ拘束条件自体を求めるときにも画像間の対応を調べる必要があり、このときにはエピポーラ拘束を利用できない。従って、本発明を適用することによって、高精度にエピポーラ拘束条件を求めることが可能になるため、結果として高精度なステレオ処理を行うことができるようになる。
【0201】
さらに、MPEG圧縮を行うときには、隣接フレーム間の対応位置を正確に求めることが、高品質で高圧縮率を達成するために必要である。隣接フレーム間の対応位置は、通常は1/2画素単位で求めるが、このときにはSADやSSD類似度評価値を利用した1次元の簡易手法を利用しているため、大きな誤差が含まれている可能性が在る。ところが、本発明は、従来の1次元推定方法に対してわずかな計算量の増加で、より確実で高精度な画像間の対応を求めることができるため、MPEG画像生成の圧縮率を向上することが可能になる。
【図面の簡単な説明】
【0202】
【図1】図1は、従来の1次元サブピクセル推定方法を説明するための図である。
【図2】図2は、3次元再構成アプリケーション用に一般的に使用される画像例(a)とその自己類似度(b)を示す図である。自己類似度マップは、自己類似度マップがk≠1及びθg≠0の性質を有しているので、従来の1次元推定方法を用いることでサブピクセル推定誤差が生じることを示している。
【図3】図3は、θc=π/2を有するテクスチャ画像例とその自己類似度を示す図である。
【図4】図4は、2次元画像モデルとその2次元類似度を示す図である。(a)はσimage=0.7の画像モデルを示し、画像のサイズは11×11[画素]である。(b)は画像モデルの自己類似度を示し、類似度の範囲は11×11である。(s,t)の暗い位置は高い類似度を有する2枚の画像の変位に対応する。最も暗い位置の(s,t)は、自己類似度の性質で(0,0)になる。
【図5】図5は、画像全体の回転角度θgとコーナー角度θcを有する2次元コーナー画像モデルを示す図である。
【図6】図6は、2次元コーナー画像モデルとその2次元自己類似度を示す図である。(a)、(b)、(c)は、θc=π/2、σimage=1の画像モデルで、それぞれθg=0,π/8,π/4である。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、θc=π/4、σimage=1の画像モデルで、それぞれθg=0,π/8,π/4である。(j)、(k)、(l)は、それぞれ(g)、(h)、(i)に対応する類似度である。
【図7】図7は、画像全体の回転角度θgと水平方向空間周波数fuと垂直方向空間周波数fvを有する2次元繰り返しテクスチャ画像モデルを示す図である。
【図8】図8は、2次元繰り返しテクスチャ画像モデルとその2次元自己類似度を示す図である。(a)、(b)、(c)は、fu=0.1、fv=0.1の画像モデルで、それぞれθg=0,π/8,π/4である。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、fu=0.05、fv=0.1の画像モデルで、それぞれθg=0,π/8,π/4である。(j)、(k)、(l)は、それぞれ(g)、(h)、(i)に対応する類似度である。自己類似度は一定の変位を有する2枚同様な画像から得られる。画像のサイズは11×11[画素]で、類似度の範囲は−5から5までである。
【図9】図9は、画像全体の回転角度θgと水平標準偏差σと垂直標準偏差kσを有する2次元ガウス画像モデルを示す図である。
【図10】図10は、2次元ガウス画像モデルとその2次元自己類似度を示す図である。(a)、(b)、(c)は、σ=2、k=1の画像モデルで、それぞれθg=0,π/8,π/4である。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、σ=2、k=0.5の画像モデルで、それぞれθg=0,π/8,π/4である。(j)、(k)、(l)は、それぞれ(g)、(h)、(i)に対応する類似度である。自己類似度は一定の変位を有する2枚同様な画像から得られる。画像のサイズは11×11[画素]で、類似度の範囲は−5から5までである。
【図11】図11は、3種類異なった2次元画像モデルと、それらの2次元自己類似度と、2次元類似度モデルに比較して2次元自己類似度の部分図を示す図である。(a)はθc=π/4、σimage=1、θg=0を有する2次元コーナー画像モデルを示す。(b)はfu=0.051、fv=0.1、θg=0を有する2次元繰り返しテクスチャ画像モデルを示す。(c)はσ=2、k=0.5、θg=0を有する2次元ガウス画像モデルを示す。(d)、(e)、(f)は、それぞれ(a)、(b)、(c)に対応する類似度である。(g)、(h)、(i)は、整数位置(〇で表す)でサンプリングされた(d)、(e)、(f)のt=0の水平部分図と、2次元類似度モデル(点線で表す)を示す。
【図12】図12は、2次元連続的に類似度計算と離散的に類似度計算の例を示す図である。
【図13】図13は、(ds,dt)=(0.2,0.4)、σ=1、k=0.7、θg=π/6を有する2次元類似度モデルを示す図である。等高線は関数値の10%から90%までに対応している。(a)において、2次元類似度モデルの長軸がθg=π/6を示す。(b)において、HEL(水平極値線)とVEL(垂直極値線)の両方が2次元類似度モデル(ds,dt)のピーク値位置を通るが、2次元類似度モデルの長軸或いは短軸と異なる。
【図14】図14は、HELとVELの推定プロセスを説明するための図である。(a)において、●は3本の水平線t=−1、t=0、t=1上の類似度値(□)から得られた推定サブピクセル位置を示し、HELは最小二乗で3つ●の位置から推定されることが可能である。(b)において、VELは同様なプロセスで推定されることが可能である。
【図15】図15は、従来の1次元推定方法及び本発明の実施例1に係る2次元推定方法にそれぞれ必要な類似度値の位置を示す図である。2次元類似度モデルは(ds,dt)=(0.2,0.4)、σ=1、k=0.3、θg=π/8を有する。
【図16】図16は、推定誤差を比較するための図である。(a)は比較用に使用される画像モデルで、即ち、θg=0、θc=π/4、σimage=1.0の2次元コーナーモデルである。(b)は(a)の画像モデルの自己類似度を示す。
【図17】図17は、推定誤差を比較するための図である。(a)は比較用に使用される画像モデルで、即ち、θg=π/8、θc=π/4、σimage=1.0の2次元コーナーモデルである。(b)は(a)の画像モデルの自己類似度を示す。
【図18】図18は、推定誤差を比較するための図である。(a)は比較用に使用される画像モデルで、即ち、θg=π/4、θc=π/4、σimage=1.0の2次元コーナーモデルである。(b)は(a)の画像モデルの自己類似度を示す。
【図19】図19は、重み関数とパラメータに依存する補間特性を説明するための図である。
【図20】図20は、合成画像を使った実験結果を示す図である。
【図21】図21は、実画像を使ったターゲットトラッキング実験結果を示す図である。
【図22】図22は、本発明の実施例2に係る3パラメータ同時推定方法において、パラメータs1に関する最大値を通る平面Π1を説明するための模式図である。
【図23】図23は、実験に用いた合成画像である。
【図24】図24は、画像の回転計測結果を示す図である。
【図25】図25は、画像の位置計測結果を示す図である。
【特許請求の範囲】
【請求項1】
N(Nは4以上の整数である)個の画像間対応パラメータを軸とするN次元類似度空間において、離散的な位置で得られた画像間のN次元類似度値を利用して、前記N個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法であって、
前記画像間のN次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似するN次元超平面を求めるステップと、
前記N次元超平面を各パラメータ軸に対してN個求めるステップと、
前記N個のN次元超平面の交点を求めるステップと、
前記交点を前記N次元類似度空間におけるN次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップと、
を有することを特徴とする画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法。
【請求項2】
3個の画像間対応パラメータを軸とする3次元類似度空間において、離散的な位置で得られた画像間の3次元類似度値を利用して、前記3個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法であって、
前記画像間の3次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する平面を求めるステップと、
前記平面を各パラメータ軸に対して3個求めるステップと、
前記3個の平面の交点を求めるステップと、
前記交点を前記3次元類似度空間における3次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップと、
を有することを特徴とする画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法。
【請求項3】
離散的に得られた画像間の2次元類似度値を利用して、連続領域における2次元類似度最大値または最小値の位置を高精度に推定する画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法であって、
前記画像間の2次元類似度値が、水平軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(水平極値線HEL)を求めるステップと、
前記画像間の2次元類似度値が、垂直軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(垂直極値線VEL)を求めるステップと、
前記水平極値線HELと前記垂直極値線VELの交点を求めるステップと、
前記交点を前記2次元類似度の最大値または最小値を与えるサブピクセル推定位置とするステップと、
を有することを特徴とする画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法。
【請求項1】
N(Nは4以上の整数である)個の画像間対応パラメータを軸とするN次元類似度空間において、離散的な位置で得られた画像間のN次元類似度値を利用して、前記N個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法であって、
前記画像間のN次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似するN次元超平面を求めるステップと、
前記N次元超平面を各パラメータ軸に対してN個求めるステップと、
前記N個のN次元超平面の交点を求めるステップと、
前記交点を前記N次元類似度空間におけるN次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップと、
を有することを特徴とする画像のサブピクセルマッチングにおける多パラメータ高精度同時推定方法。
【請求項2】
3個の画像間対応パラメータを軸とする3次元類似度空間において、離散的な位置で得られた画像間の3次元類似度値を利用して、前記3個の画像間対応パラメータを高精度に同時推定する画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法であって、
前記画像間の3次元類似度値が、ある1つのパラメータ軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する平面を求めるステップと、
前記平面を各パラメータ軸に対して3個求めるステップと、
前記3個の平面の交点を求めるステップと、
前記交点を前記3次元類似度空間における3次元類似度の最大値または最小値を与える前記画像間対応パラメータのサブサンプリンググリッド推定位置とするステップと、
を有することを特徴とする画像のサブピクセルマッチングにおける3パラメータ高精度同時推定方法。
【請求項3】
離散的に得られた画像間の2次元類似度値を利用して、連続領域における2次元類似度最大値または最小値の位置を高精度に推定する画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法であって、
前記画像間の2次元類似度値が、水平軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(水平極値線HEL)を求めるステップと、
前記画像間の2次元類似度値が、垂直軸に対して平行な直線上で最大または最小となるサブサンプリング位置を求め、求められた前記サブサンプリング位置を最も近似する直線(垂直極値線VEL)を求めるステップと、
前記水平極値線HELと前記垂直極値線VELの交点を求めるステップと、
前記交点を前記2次元類似度の最大値または最小値を与えるサブピクセル推定位置とするステップと、
を有することを特徴とする画像のサブピクセルマッチングにおける2パラメータ高精度同時推定方法。
【図1】

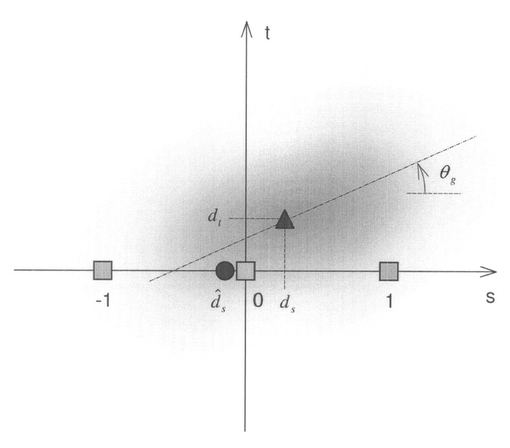
【図2】
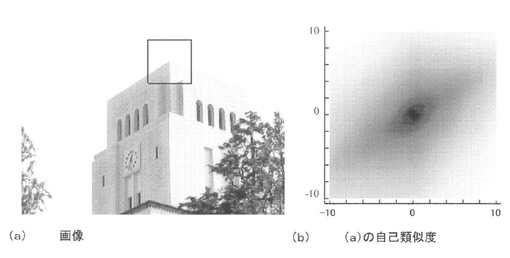
【図3】
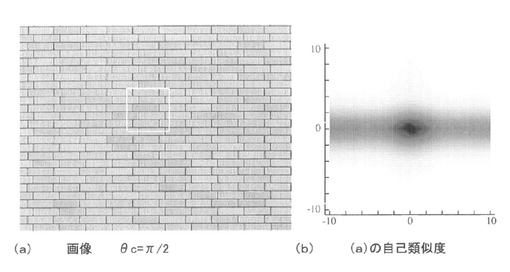
【図4】
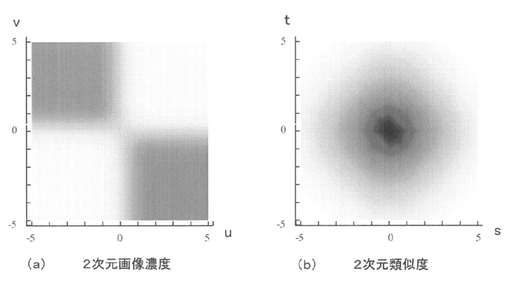
【図5】
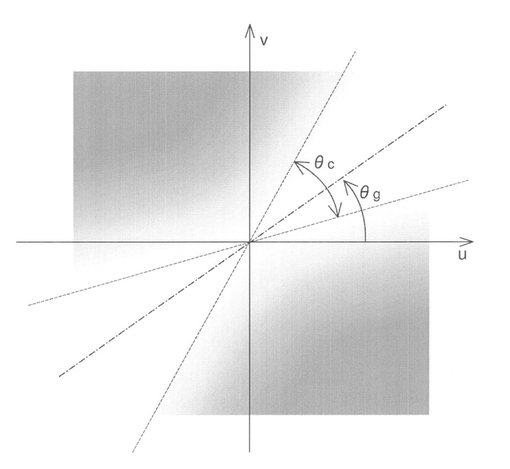
【図6】
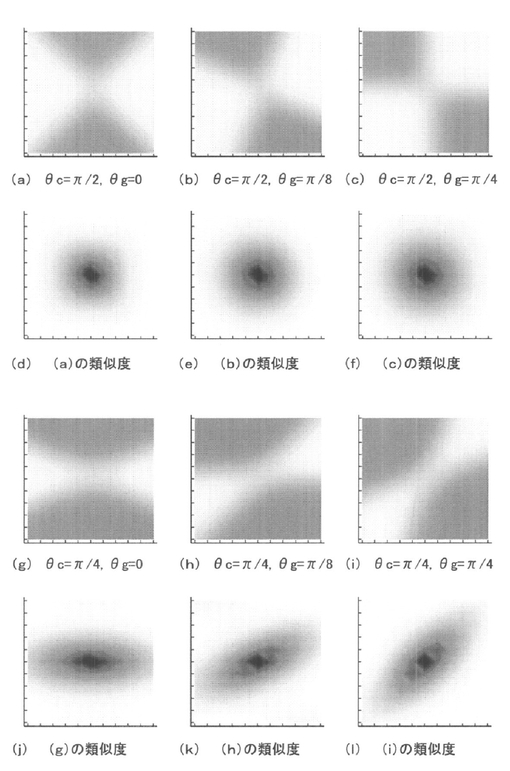
【図7】
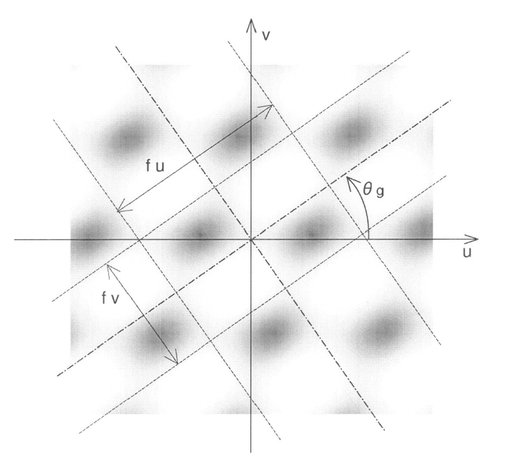
【図8】
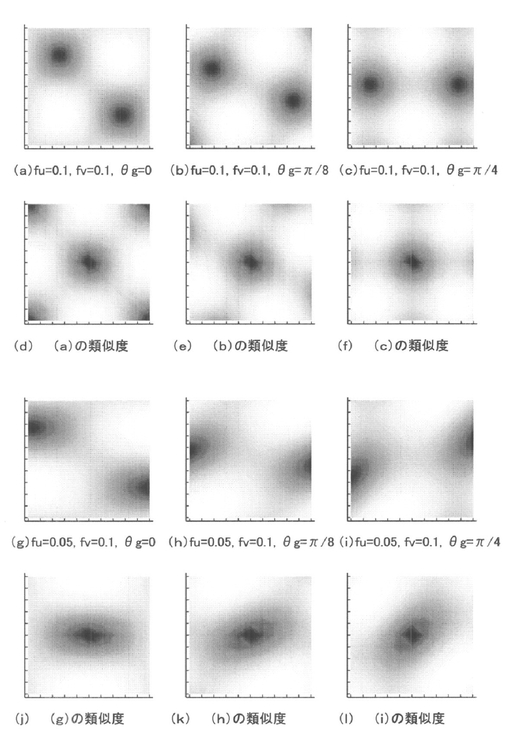
【図9】

【図10】
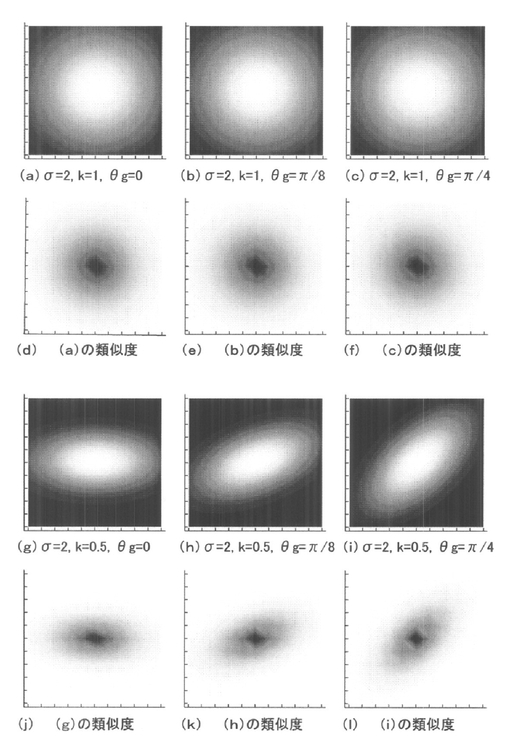
【図11】
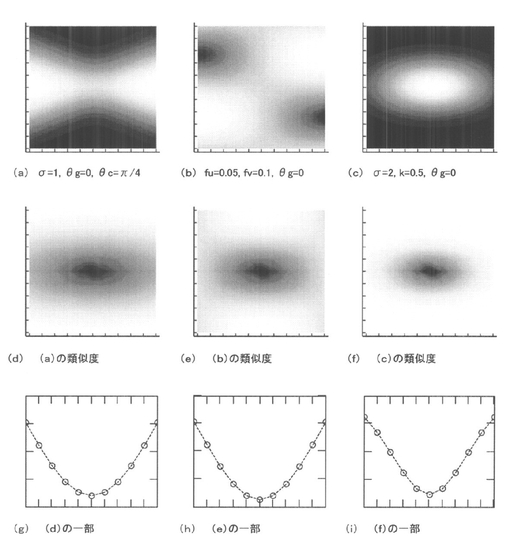
【図12】
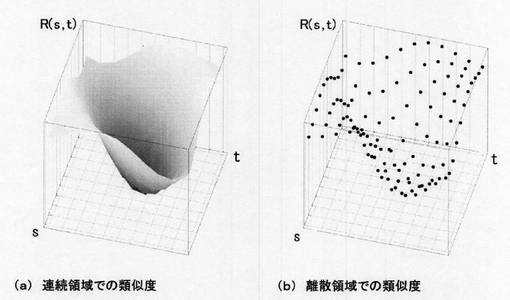
【図13】
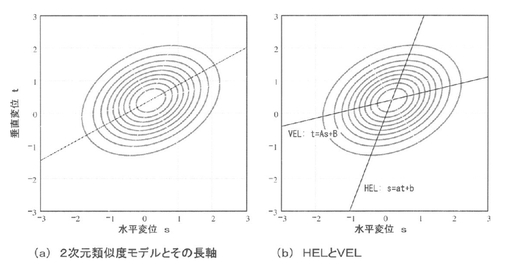
【図14】
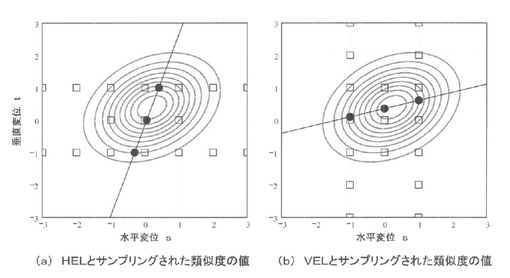
【図15】
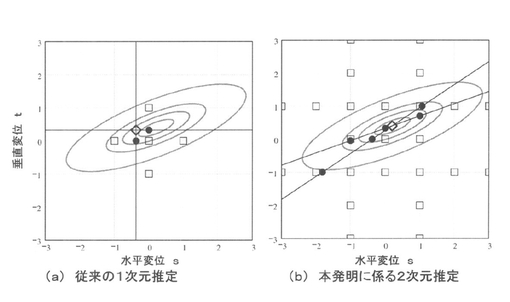
【図16】
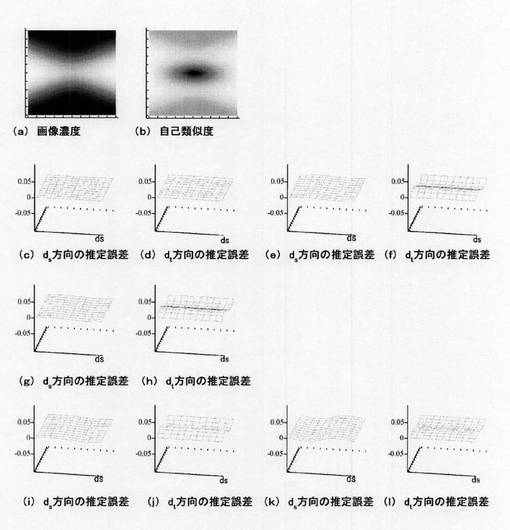
【図17】
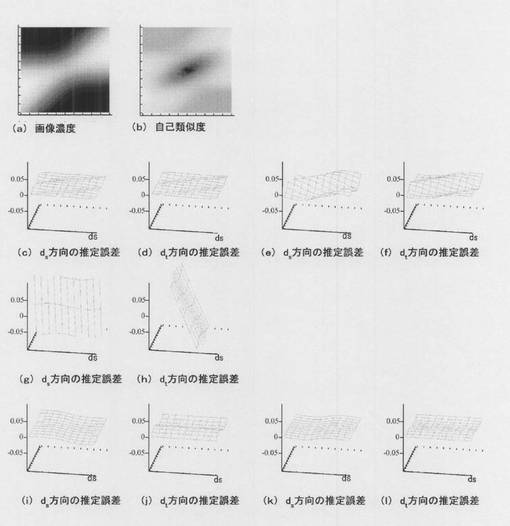
【図18】
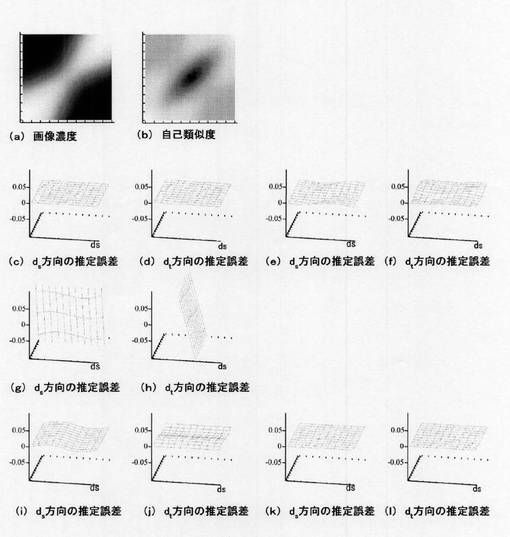
【図19】
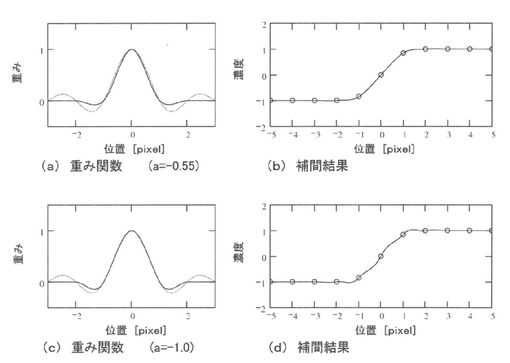
【図20】
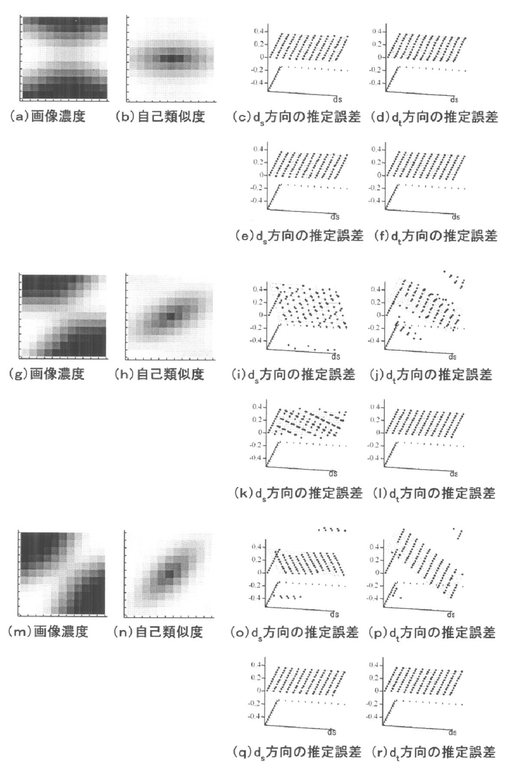
【図21】
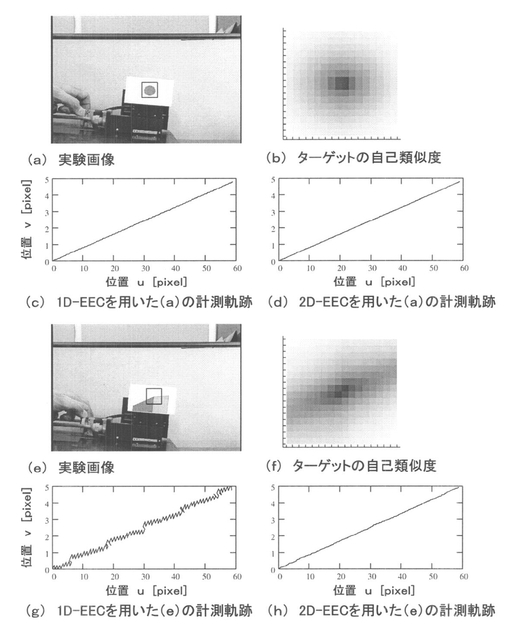
【図22】
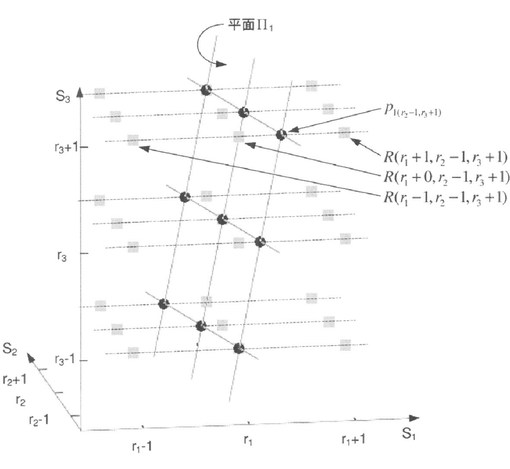
【図23】
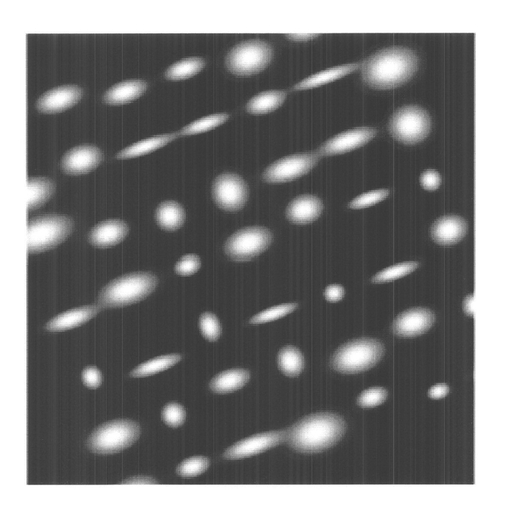
【図24】
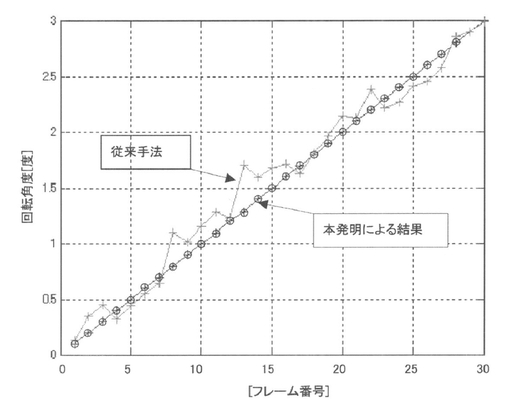
【図25】
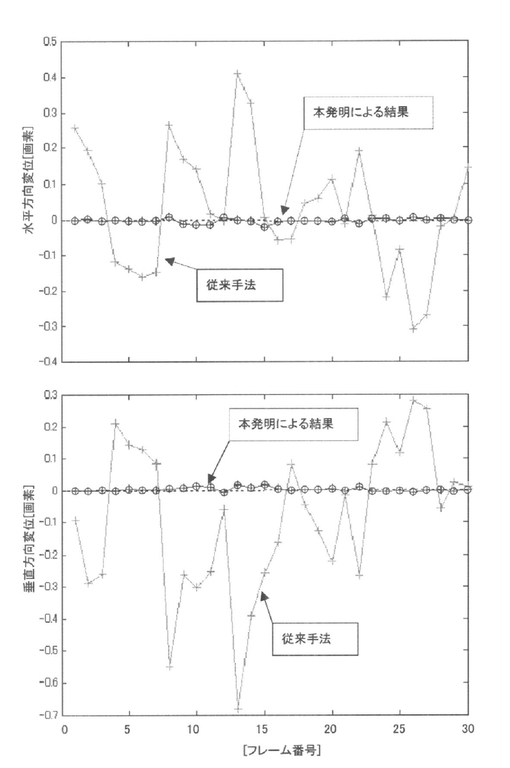
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2008−117416(P2008−117416A)
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願番号】特願2007−323866(P2007−323866)
【出願日】平成19年12月14日(2007.12.14)
【分割の表示】特願2004−525640(P2004−525640)の分割
【原出願日】平成15年10月29日(2003.10.29)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願日】平成19年12月14日(2007.12.14)
【分割の表示】特願2004−525640(P2004−525640)の分割
【原出願日】平成15年10月29日(2003.10.29)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]