
画像を取得し変換するための方法および装置
取得レンズにより、画像をローパスフィルタリングするステップと、画像センサを使用し、アップサンプリング係数を用いて、前述のローパスフィルタリングされた画像から、第1の解像度を有するアップサンプリングされた画像を生成するステップと、画像処理回路を用いて、前述のアップサンプリングされた画像を、前述の第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するステップとを含む、画像を取得し、変換するための方法であって、前述の変換するステップが、前述のレンズの前述のローパスフィルタリングおよび前述のアップサンプリング係数に依拠する、方法。ギガピクセルセンサおよび慣例画像センサに適合される。

【発明の詳細な説明】
【技術分野】
【0001】
発明の分野
本発明は、画像の取得及び変換のための方法に関する。本発明は、画像取得装置およびコンピュータプログラム製品にも関する。
【背景技術】
【0002】
関連技術の説明
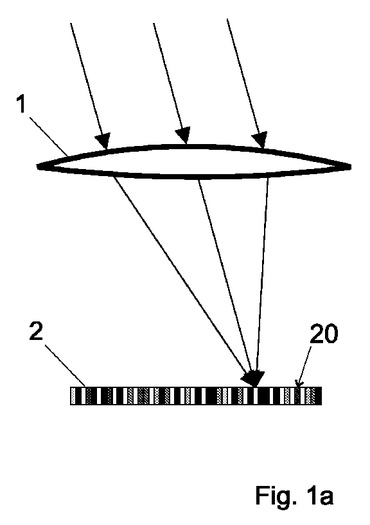
図1aに、カメラまたは他の撮像システムの単純化した構造を示す。カメラは、列またはアレイを成す複数の画素20を含む画像センサ2の平面上への入射光の焦点を合わせるレンズ1を含む。画像センサ内の各画素20は光子を集め、その光子をアナログ電気信号に変換し、そのアナログ電気信号はA/D変換器などの量子化器により、例えば1ビット、8ビット、または12ビットに量子化される。画素に当たる光子の数は、ポアソン過程によりモデル化することができる。量子化器は、画素ごとに設けることができ、または複数の画素によって共用される読出し回路ごとに設けることができる。
【0003】
画像センサは、所与の露光時間の間の、およびある空間領域にわたる、光強度場の積分関数(integration function)をサンプリングするサンプリング装置とみなすことができる。カメラにおいて最も重要なパラメータの1つは、空間的なサンプリング間隔を決定する、画素のサイズである。
【0004】
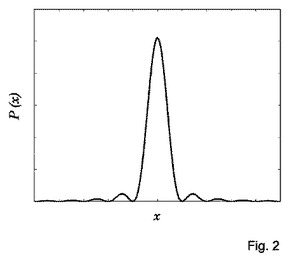
回折限界により、レイリーの基準は、理想的なレンズの最小空間解像度を与える。レンズ1のインパルス応答は、点広がり関数(PSF)、図2に示すP(x)である。レンズには収差があり、理想的なレンズでさえ回折があるので、点広がり関数はディラックのデルタ関数ではなく、むしろこのレンズはゼロを上回る最小空間解像度を有するローパスフィルタの役割を果たす。
【0005】
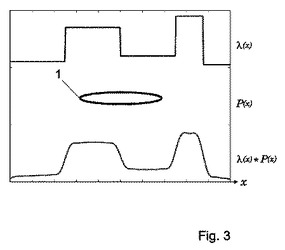
図3に、レンズのモデルを一例として示す。レンズの前の光強度場はλ(x)であり、xは空間インデックスを表す。レンズのローパス効果により、レンズの後の光強度場は帯域制限され、λ(x)*P(x)に等しい(*は畳み込み作用素である)。
【0006】
CMOS技術におけるスケーリング効果のおかげで、消費者向けのカメラおよび他の撮像装置で使用される最先端の画素サイズは、多くの場合レンズの最小空間解像度よりも小さい。この場合、画像センサはオーバーサンプリング装置の役割を果たし、レンズによる帯域制限後の画像信号の帯域幅が必要とするよりも多くのサンプルを生成する。
【0007】
さらに、いわゆるギガピクセルカメラ(またはギガピクセルデジタルフィルム)も知られており、これらでは大きなオーバーサンプリング係数が使用される。ギガピクセルカメラの画像センサは、対数関数に似た非線形応答を有し、そのような応答はそれらの画像センサを、高ダイナミックレンジシーンを取得するのに非常に適したものにする。さらに、ギガピクセルカメラは通常、画素ごとに単一の光子検出器を有し、このことは、高感度の光子検出機構により微光状態における露光時間を短縮する。映像や写真、または例えば光の代わりにX線や他の波長を用いる医用画像を含む一般にどんな種類の画像を撮るためにも、ギガビジョンカメラを使用することができる。
【0008】
通常、ギガピクセルカメラ内の画素は、各画素の出力を2進値(黒または白)に変換するための1ビット量子化器を有する。したがって、ギガピクセルセンサによる画像出力は、非常に高い空間解像度を有するが、画素ごとに2つのレベルだけ、例えば2つの階調レベルしか有さない。その結果、ギガピクセルセンサの高解像度の2進出力を、より低い解像度だがより多くの階調レベルを有する画像信号に変換するための処理回路が必要である。
【0009】
一態様によれば、このようなわけで本発明は画像変換に関し、具体的にはオーバーサンプリングされたデジタル信号に基づくマルチレベル画像の推定値を再構築するための方法に関する。一部の実施形態では、本発明は、高解像度の2値画像信号をより低い解像度のマルチレベル信号に変換することに関する。別の実施形態では、本発明は、マルチレベル画像信号を各画素または一部の画素において異なる数のレベルを有しかつ/または異なる解像度を有する、別の信号に変換することにも関する。どんな画像センサによる1D、2D、またはN−D画像信号出力を変換するためにも、全ての実施形態を使用することができる。
【0010】
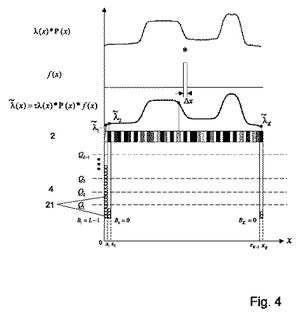
図4は、画像センサ2を概略的に示す。このセンサの働きは、レンズ1を通過する入射光をサンプリングすることである。k番目の画素によって生成される電子の数Skは、この画素に衝突する光子の数によって決まる。例えば画素の量子効率が「1」の場合、画素20が生成する電子の数は、この画素が受け取る光子の数に等しい。
【0011】
露光時間τの間、および画素幅Δxでは、k番目の画素によって生成される電子の数Skは、パラメータ
【数1】
を伴うポアソン分布に従い、
これは、露光時間の間に画素が生成する電子の平均数である。この分布は以下のように表すことができる。
【数2】
【0012】
図4に示すように、画像センサ2によって与えられる値は、カーネル関数f(x)によるレンズの後の信号λ(x)*P(x)の畳み込みと、その後に続く、
【数3】
における、その結果生じる関数
【数4】
のサンプリングである。次いで、量子化器を使用して電子の数を量子化し、以下の通り同じくランダム変数である画素値Bkをもたらす。
【数5】
【0013】
k番目の画素の開始位置はxk−1であり、終了位置はxkである。したがって、画素が受ける光の推定値
【数6】
は、次式の通りである。
【数7】
【0014】
量子化した後、画像センサ2は1組の数値B=[B1,B2,...,BK]Tをもたらし、b=[b1,b2,...,bK]Tは、ランダム変数Bの具現化(realization)である。
【0015】
したがって本発明の1つの狙いは、それらの量子化した画素値を所与として、光強度場
【数8】
の推定値をもたらすことである。
【0016】
具体的には、本発明の狙いは、オーバーサンプリング画像センサ、すなわち
【数9】
のナイキストレートよりも大きい空間周波数および/または時間周波数を有する画像センサの出力に基づいて光強度場
【数10】
を取得することである。
【0017】
ギガピクセルセンサの特別なケースでは、本発明の狙いは、センサによる2進のより高解像度の画像出力を使用して、(階調レベルを有する)従来の画像を再構築することである。
【0018】
ギガピクセルカメラなどのオーバーサンプリングカメラによってとられる量子化された測定から画像を再構築するための再構築法は従来技術で知られている。例えば、ブロック内で隣接する画素によって与えられる信号を追加し、または平均することが知られている。ギガピクセルカメラの場合、例えば隣接する画素のブロック内で2進値Bを合計することにより、階調レベルを示す多値信号を生成することが提案されている。画像センサの出力をローパスフィルタリングし、ダウンサンプルすることに基づく他の方法も知られている。この処理は画像センサの読出し回路内で通常行われ、またはカメラ内もしくはコンピュータ内の任意のデジタル画像処理システム、または捕捉画像を受け取って処理する他の処理システムによって行うことができる。
【0019】
この従来技術による手法の問題点は、ローパスフィルタリングおよびダウンサンプリングによる画像再構築の性能が悪く、または少なくとも最適ではないことである。
【0020】
従来技術の画像センサにおける1つの難点は、レベルを区別するために量子化器が用いる閾値Q1を決定することである。例えば光強度が高い場合、閾値Q1が大きいギガピクセルカメラは、閾値が小さいギガピクセルカメラよりもうまく機能する。光強度が低い場合、閾値Q1が小さいギガビジョンカメラは、閾値が大きいギガビジョンカメラよりもうまく機能する。マルチレベル画像を生成する画像センサにも同じ困難が当てはまる。
【発明の概要】
【発明が解決しようとする課題】
【0021】
したがって、より優れた画像品質を提供し、画像センサが生成する量子化値に基づいて入射光場のより優れた推定値をもたらす、改善された画像取得および再構築の方法および装置が求められている。
【0022】
カメラによってとられる量子化された測定から画像を再構築するための再構築アルゴリズムの速度を改善することも求められている。
【0023】
多重露光の下で画像を捕捉する際に、または大量の空間的オーバーサンプリングに伴って計算の複雑さが著しく高まることがない再構築法も求められている。
【課題を解決するための手段】
【0024】
本発明の再構築の方法および装置は、サンプリング理論の新規使用に部分的に基づく。この理論は、推定光強度場
【数11】
を、ナイキストレートにおけるサンプル
γj,J=1,2,...,Jから完璧に再構築できることを次式の通り知らせ、
【数12】
ただし
γj,J=1,2,...,Jはナイキストレートにおける推定光強度場
【数13】
のサンプルであり、φ(x)はカーネル関数であり、Xjはj番目の画素のサンプリング位置である。オーバーサンプリングレートは、
【数14】
である。
【0025】
サンプリング位置xk,K=1,2,...,Kを考慮に入れ、先の式を以下のようにデジタル形式で示すことができる。
【数15】
【0026】
画素サイズΔxがN倍に変わる場合、カーネル関数をこの倍率だけ変えればよいという仮定に基づき、上記の等式では記号「≒」を使用するが、それはカーネル関数が多くの場合理想的なものではなく近似に過ぎないからである。
【0027】
したがって本発明の一態様によれば、上述の狙いは、従来技術のように画像信号の変換が単に一連のローパスフィルタリング操作およびダウンサンプリング操作ではなく、むしろこの変換をデジタルサンプル値から信号を再構築すること、例えばナイキストレートを上回るサンプリングレートでとるデジタル値から信号を再構築することであって、光学系および電子システム全体の特性、とりわけレンズの特性を考慮に入れる、再構築することとみなす方法によって達成される。
【0028】
上述の狙いはさらに、
画像の取得及び変換のための方法であって、
取得レンズにより、画像をローパスフィルタリングする(またはより広くは変換関数を使って変換する)ステップと、
画像センサを使用し、アップサンプリング係数を用いて、前述のローパスフィルタリングされた画像から、第1の解像度を有するアップサンプリングされた画像を生成するステップと、
画像処理回路を用いて、前述のアップサンプリングされた画像を、前述の第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するステップと
を含み、
前述の変換するステップが、前述のレンズの前述のローパスフィルタリングおよび前述のアップサンプリング係数に依拠する、
方法によって達成される。
【0029】
再構築はレンズの伝達関数およびオーバーサンプリング係数に依拠し、よって、システム全体の最適化および改善された画像品質をもたらす。
【0030】
この再構築プロセスによって与えられる出力は、典型的にはマルチレベル画像、すなわちグレースケールやカラー画像など、画素ごとに3つ以上のあり得る異なる値を有する画像である。
【0031】
一実施形態では、アップサンプリングされた画像は、2進のアップサンプリングされた画像を出力するギガピクセル画像センサを用いて生成される。
【0032】
一実施形態では、センサの量子化器が空間的に変化する構成を含む。例えば1ビット量子化器の場合、センサ上のある画素群が閾値Q1=1を有し、残りの画素がより高い閾値または様々な異なる閾値を有することができる。
【0033】
有利には、マルチレベル画像への変換は、最尤推定法を実施する方法および回路によって行われる。
【0034】
一態様によれば、本発明は、負の対数尤度関数が凸関数であるという発見に基づき、このことは、とりわけ量子化器の閾値Qが「1」の場合に当てはまるが、閾値が「1」ではなく、量子化器がマルチレベル測定値Bを生成するための複数の閾値を有する場合にも当てはまる。したがって、凸最適化を使用して最適な解決策を実現することができる。
【0035】
一実施形態では、取得した画像ごとに少なくとも2回の露光を行い、その結果、時間的(temporal)オーバーサンプリングおよび画像ごとに使用されるより多くのサンプルをもたらす。計算上の複雑さを著しく高めることなしに多重露光を使用できるようにする方法について記載する。
【0036】
一態様によれば、この再構築法は、負の対数尤度関数の勾配、およびベクトルとヘッセ行列との乗算を計算するためのフィルタバンク技法に基づく最大尤度法を使用する。フィルタバンク技法を使用することは高速処理をもたらす。
【0037】
有利には、計算速度を上げるために、信号および作用素の多相表現または改善された別の表現を使用する。
【0038】
本発明による方法の重要な利点は、レンズのローパスフィルタリング関数およびギガビジョンセンサのアップサンプリング関数を活用して、およびそれらに依拠して画像を再構築できるようにすることである。
【0039】
有利には、センサによって出力される測定から画像を再構築することは、DSPエレメントによって、FPGAコンポーネントによって、カメラ内またはコンピュータ内のマイクロプロセッサもしくはマイクロコントローラによって行うことができる。例えばこの方法の中で使用する最尤推定は、この一覧の中の手段によって実行することができ、または他の任意の適切なハードウェアもしくはソフトウェアの手段によって実行することができる。
【0040】
このために、画像を処理する間の画像確立(image elaboration)プログラムは、カメラのセンサおよびレンズを考慮に入れる。別の実施形態では、再構築をカメラの外部にある画像処理装置、例えばコンピュータが実行する画像処理ソフトウェアや、カメラが出力する画像ファイルを受け取って処理するIT装置によって行う。本発明は、本願に記載の方法を処理システムに実行させるためのコンピュータプログラムを有形かつ永続的に記憶するコンピュータプログラム製品にも関する。
【0041】
本発明は、例として図面によって示される実施形態の記載により、よりよく理解される。
【図面の簡単な説明】
【0042】
【図1a】カメラの単純化した構造を示す。入射光がレンズによって焦点を合わせられ、画像センサ上に衝突する。その後、画像センサ内の各画素が受け取った光子を電子に変換する。
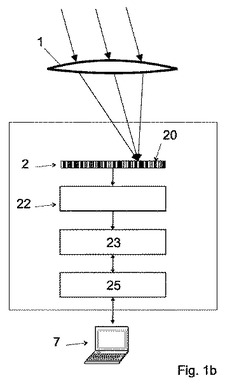
【図1b】カメラおよび追加の画像処理手段を含む画像取得装置の単純化した構造を示す。
【図2】レンズの点広がり関数の一例を示す。
【図3】レンズのモデルを示す。レンズは、インパルス応答P(x)を有する線形システムとしてモデル化される。光強度場λ(x)がレンズを通過した結果がλ(x)*P(x)である。
【図4】電子の数を量子化し、画素値Bk,k=1,2,...,Kをもたらすために、レベルQ1,Q2,...,QL−1を有するLレベルの量子化器を使用する画像センサのモデルを示す。
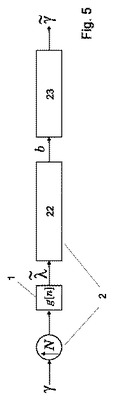
【図5】本発明のカメラについてのモデルの一例を示す。γ=[γ1,γ2,...,γJ]Tは、ナイキストレートにおける
【数16】
のサンプルである。Nはアップサンプリング係数である。g[n]はローパスフィルタである。
【数17】
は
【数18】
のオーバーサンプリングされたサンプルである。B=[B1,B2,...,BK]Tは、量子化された画素値であり、b=[b1,b2,...,bK]TはBの具現化である。
【数19】
は
【数20】
の再構築された値である。
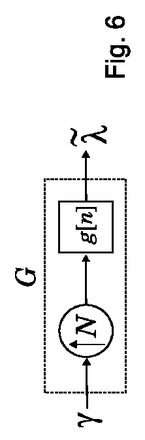
【図6】アップサンプリングおよびローパスフィルタリング作用素Gを示す。
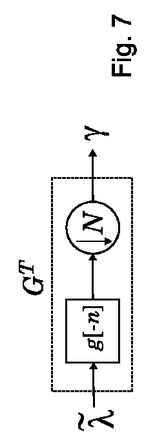
【図7】ローパスフィルタリングおよびダウンサンプリングのための作用素GTを示す。
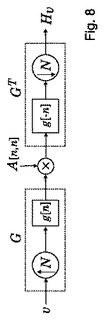
【図8】L(γ)のヘッセ行列Hvにベクトルvを掛ける計算の図を示す。g[n]およびg[−n]はローパスフィルタである。
【図9】シーケンスx[k](左)およびフィルタg[k](右)の多相表現を示す。
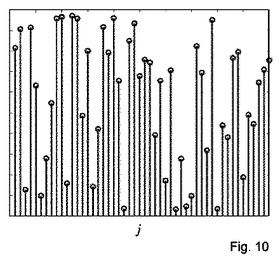
【図10】1−D合成信号γの一例を示す。
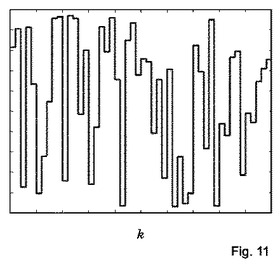
【図11】オーバーサンプリング係数N=100、および露光時間τ=1を用いた、アップサンプリングされ、ローパスフィルタリングされた信号
【数21】
の一例を示す。
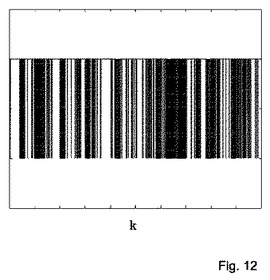
【図12】閾値Q1=1、オーバーサンプリング係数N=100、および総露光時間τ=1を用いてカメラによって生成された2進シーケンスの一例を示す。
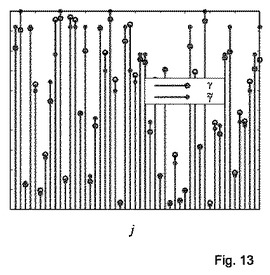
【図13】閾値Q1=1、オーバーサンプリング係数N=100、露光回数M=1、および露光時間τ=1を用いた、1−D合成信号γならびに推定信号
【数22】
の一例を示す。
【発明を実施するための形態】
【0043】
発明の可能な実施形態の詳細な説明
表記を単純にするために、1次元(1−D)センサアレイの特定の事例をより詳しく説明する。あらゆる結果および解説を二次元(2−D)の事例、またはN次元の事例にさえも拡張することができ、N次元の事例では追加の次元が、例えば三次元画像センサによって、またはカメラのネットワークによって与えられる奥行き(画像センサまでの距離)に相当することができる。さらにこの方法および装置は、写真および/またはビデオ画像などの静止画を処理するために使用することができる。
【0044】
図1bに、画像取得装置の単純化した構造を示す。このシステムは、レンズ1および画素20を有する画像センサ2を含む、図1aに関連して記載したのと同様のカメラを含む。レンズおよび画像センサは、多くのコンパクトカメラにあるように一体型とすることができ、またはレフ型カメラにあるように脱着式とすることもできる。レンズは、超薄型カメラを実現するためのレンズアレイとすることができる。一例では、各画素がアバランシェフォトダイオードの周りに構築され、単一の光子検出器として機能する。CMOS画像センサやCCD画像センサなどの従来の画像センサ、ならびに赤外線センサ、X線センサ、または電磁信号を受け取るときに電荷を発生させることができる他のセンサも使用することができる。
【0045】
参照番号22は、画素の出力をデジタル値に変換するための量子化回路を示す。この量子化器は各画素の一部とすることができ、その場合それらの画素は、露光時間の間に受け取る光子の数に応じたデジタル値、例えば2進値や整数値を直接送り出す。別の実施形態では、量子化回路が、複数の画素によって出力される信号を処理し、量子化するように構成される読出し回路の一部である。単一の画像センサにいくつかの量子化回路を関連させてもよい。
【0046】
一実施形態では各量子化器が単一の閾値Qを有し、その場合、その量子化器によって与えられる出力信号は2進であり、画素によってもたらされる電子の数がこの閾値を上回る場合、出力信号の値は1であり、さもなければ0である。
【0047】
別の実施形態では、量子化器が、複数のレベルQ1,Q2,...,QL−1を有するLレベルの量子化器4であり、レベル間の閾値は等距離でもそうでなくてもよく、量子化器は、K画素それぞれの階調レベルを示すマルチレベル画素値Bk,K=1,2,...,Kをもたらす。以下に説明するように、異なる数の閾値を有しかつ/または閾値間の様々な距離を有する様々な量子化器を単一の画像センサに関連させることができる。
【0048】
図1bの参照23は、1つまたは複数の量子化器22によって与えられる量子化された画素値Bを処理するための処理回路を示す。この処理回路は、マイクロプロセッサ、マイクロコントローラ、デジタル処理回路、FPGA、asic等の周りに構築することができる。この処理回路はメモリ、例えば処理回路によって実行されるソフトウェア(bios)、および処理回路23によって与えられる処理済み画像を記憶するための、例えばフラッシュメモリなどの半永久メモリ25に接続される。この処理回路は、以下に記載する再構築法を使用して、画像センサ22によって与えられる画像信号をより低解像度の画像ファイルに変換するためのプログラムまたは関数を実行する。それらの再構築法は、カメラの外部、例えばパーソナルコンピュータ7、ワークステーション、サーバ、または画像センサがもたらすオーバーサンプリングされたサンプルを受け取って処理することができる他の任意のITシステム内で実行されるプログラムにより、全体的にまたは部分的に実行することもできる。
【0049】
再構築はレンズの伝達関数および画像センサが使用するオーバーサンプリング係数に依拠するので、再構築を行う処理回路23はそれらのパラメータを知っておく必要がある。レンズがこの処理回路と一体でない場合、使用されるレンズの種類またはレンズの伝達関数を画像ファイル内のメタデータとして示すことができ、またはユーザが入力することができ、または例えばナレッジデータベースから取得することができ、または事前に知っておくことができる。オーバーサンプリング係数は通常、例えばサンプルの数bを求めることによって画像ファイルから取得することができる。
【0050】
図5は、本発明の装置の別のブロック図である。光強度場γ=[γ1,γ2,...,γJ]Tが、カメラセンサ2により、係数Nによって空間的に(および/または時間的に)アップサンプルされ、レンズ1に相当するローパスフィルタg[n]によってフィルタリングされ、その結果、
【数23】
のオーバーサンプリングされたサンプルをもたらす。画像センサの出力部における光強度場
【数24】
とレンズの前の光強度場γとの間の関係を
【数25】
と示すことができ、ただしG=[g1,g2,...,gk]Tは、図6に示すアップサンプリングおよびローパスフィルタリング作用素を表すK×J行列である。
【0051】
次いで量子化器22が、量子化された画素値Bを生成する。最後に、カメラ内またはデジタル処理システム内のデジタル処理手段23が再構築アルゴリズムを実行して、光強度場の推定値
【数26】
を得る。
【0052】
再構築の狙いは、光強度場の推定値
【数27】
を計算することである。本発明の一態様によれば、デジタル処理手段23が実行する再構築法は、再構築問題を解き、以下のように
【数28】
を計算するために、最尤推定量(MLE)または他の最尤推定手段を使用する。
【数29】
【0053】
それらの関係は、以下の発見に基づく。(1)では、λKが与えられるときの各画素の独立性を使用し、(2)では、対数関数1nが最大化問題の解を変えないことを使用し、(3)では、関数を最大化する解が、対応する陰関数の最小化に等しい特性を使用する。
【0054】
各画素kについて、負の対数尤度関数L(γ)を
【数30】
として示すことができ、その結果
【数31】
となる。
【0055】
たとえ量子化器がマルチレベル量子化器でも、L(γ)が凸関数であることを論証することができる。論証は付録の中で見ることができる。
【0056】
空間的オーバーサンプリングに加えて、またはその代わりに、各期間[0,τ]の間にM枚の写真を撮ることにより、時間的オーバーサンプリングを行うことも可能である。この例では全ての写真を同じ露光時間
【数32】
で撮るが、別の露光時間を考えてもよい。
【0057】
仮に
【数33】
を画像センサ用の新たなパラメータ関数とした場合、次式
【数34】
が成立し、これは各露光について同じである。そのようにして、元のパラメータ関数をM倍スケールダウンさせる。すると次式
【数35】
および
【数36】
が成立する。仮にB=[Bl,B2,...,BM]とし、ただしBm,[Bml,Bm2,...,BmK]T、M=1,2,...,Mは、m番目の露光中に出力される画素値であり、Bmk,K=1,2,...,Kは、m番目の露光中のk番目の画素の画素値である。γを推定するための最尤推定量(MLE)は次式の通りである。
【数37】
【0058】
したがって推定量は、以下の発見を使用する。(1)では、関係はλkが与えられるときの各画素の独立性に基づき、(2)では、推定量は1nが最大化問題の解を変えないことを使用し、(3)では、推定量は関数を最大化する解が、対応する陰関数を最小化するのに等しい特性を使用する。
【0059】
したがって先の等式により、次式
【数38】
が成立し、ただし
【数39】
は、次式のように負の対数尤度関数である。
【数40】
【0060】
仮に
【数41】
とした場合、次式が成立する。
【数42】
【0061】
複数の連続した露光では、単一の露光の場合と同様に
【数43】
が凸関数であることを論証することができる(付録を参照されたい)。したがって、負の対数尤度関数は凸関数なので、推定量は、例えば内点法、信頼領域法、ニュートン法のような、凸最適化問題を解くための任意の方法を使用することができる。有利には、この方法は、解を見つけるのに必要な計算時間および計算能力を減らすように選択する。
【0062】
一実施形態では、推定量が、露光が1回の事例において入射光を推定するために、以下の修正されたニュートン法を使用する。当業者は、多重露光の事例にもこの方法を適用することができる。あり得る擬似コードは以下の通りである。
【数44】
【0063】
問題は、ヘッセ行列のサイズ∇2L(γ)が非常に大きく、そのためこの行列の逆を計算するにはかなりの処理能力および処理時間が必要である。一態様によれば、この計算時間を減らすために、本システムは共役勾配法を実行し、∇2L(γ)-1∇L(γ)を直接計算するようにプログラムされる。
【0064】
ニュートン法、内点法、信頼領域法のような凸最適化問題を解くための最も知られている方法では、負の対数尤度関数の勾配を与え、ベクトルとのヘッセ行列の乗算を行う必要がある。
【0065】
本発明の方法で使用する方法は、負の対数尤度関数L(γ)の勾配が
【数45】
であり、L(γ)のヘッセ行列がH=GTAGであるという発見にも基づいており、ただし以下の関係が成立する。
【数46】
【0066】
上記の2つの等式の問題点は、アップサンプリング係数が大きい場合、行列Gは大きく、それを記憶するために莫大な記憶空間が必要になることである。
【0067】
しかし、作用素Gはレンズおよび画像センサのアップサンプリング部分に相当し、行列全体を記憶する必要はない。アップサンプリングおよびローパスフィルタリング作用素のパラメータ、すなわちアップサンプリング係数Nおよびローパスフィルタg[n]の係数さえ分かればよい。レンズのローパスフィルタの係数はレンズの記憶域内に記憶し、変換を行う処理手段に伝送することができる。別の実施形態では、それらの係数が処理手段によって事前に知られている。例えば、処理手段は、使用されるレンズの特性を前もって知っている。さらに別の実施形態では、処理手段は、自らが受け取るレンズの種類の識別情報に基づき、それらの特性を取得する。
【0068】
G=LUと示すことができ、ただしLはローパスフィルタリング作用素を示し、Uはアップサンプリング作用素を示す。すると次式が成立し、GT=(LU)T=UTLT=DR、ただしDはダウンサンプリング作用素の行列表記法であり、Rはローパスフィルタリング作用素の行列表記法である。Dのダウンサンプリング係数は、Uのアップサンプリング係数に等しい。Lのフィルタ係数がg[n]の場合、Rのフィルタ係数はg[−n]である。対称ローパスフィルタの場合、LおよびRのフィルタ係数は同じである。図7は、ローパスフィルタリングおよびダウンサンプリング作用素GTの行列を示す。
【0069】
【数47】
の勾配は、まずベクトルL
【数48】
をローパスフィルタリングし、次いでそれを係数Nによってダウンサンプリングすることで計算することができる。
【0070】
負の対数尤度関数のヘッセ行列H掛けるベクトルvはHv=GT AGvである。図8は、上記の等式を計算するための図を示す。アップサンプリング係数Nを使ってベクトルvをアップサンプリングし、次いで、フィルタg[n]を使用してそれをローパスフィルタリングする。
【0071】
行列Aは対角行列なので、AとベクトルGvとの乗算は、AとGvとの対角線の要素ごと乗算(elementwise multiplication)に等しい。その後、得たベクトルを処理手段がフィルタg[−n]を使ってローパスフィルタリングし、N倍にダウンサンプリングしてHvを得る。
【0072】
結果として、処理手段は測定されたサンプルから画像信号を再構築することができる。
【0073】
本発明の一態様によれば、最適化プロセスの速度をさらに上げるために、多相表現を使用してアップサンプリングおよびダウンサンプリング作用素の計算時間を減らすことができる。シーケンスおよびフィルタのために様々な多相表現を定めることができる。
【0074】
次式に定めるように、1−Dシーケンスx[k]またはフィルタg[k]をNの多相成分に分解することができる。
【数49】
【0075】
図9は、シーケンスx[k](左部)およびフィルタg[k](右部)の多相表現を概略的に示す。次式のように、z領域におけるこの多相表現を計算することもできる。
【数50】
【0076】
仮にY(z)を、信号x[k]に対してローパスフィルタリングおよびダウンサンプリング作用素を実施する場合の出力であるシーケンスy[k]のz変換とした場合、次式が得られる。
【数51】
【0077】
これは、シーケンスx[k]に対して作用素を実施するプロセスが、フィルタおよびシーケンスをNの多相成分に分解し、シーケンスのn番目の多相成分を、対応するフィルタのn番目の多相成分とは別にフィルタリングし、フィルタリングした全ての結果を合計してy[k]を生成することを意味する。
【0078】
このプロセスの間、処理手段はダウンサンプリングプロセス中に廃棄されるシーケンス値を計算しないようにし、その結果計算時間を節約することができる。
【0079】
g[k]をシーケンスに関する多相表現の定義を使って分解する場合、次式が成立する。
【数52】
そして、x[k]に対してアップサンプリングおよびローパスフィルタリング作用素を実施する出力は以下のように示すことができる。
【数53】
ここで、Yn(Z)は、出力シーケンスy[k]のn番目の多相成分のz変換である。
【0080】
この方法を使用して、処理手段はフィルタ係数とアップサンプリングプロセス中に生成される「0」との乗算を計算しないようにし、それにより速度をN倍に上げる。
【0081】
分析により、1ビット量子化器の事例では、より低い閾値Q1が微光状況において僅かな推定誤りをもたらすが、より高い閾値がより適している光強度が高い領域ではうまく機能しないことも分かった。
【0082】
適切な閾値の問題に対処するために、一実施形態では、センサの量子化器が空間的に変化する構成を有する。例えば1ビット量子化器を使用する一実施形態では、センサ上の第1の画素群が閾値Q1=1を有する一方で、他の画素はより高い閾値を有する。同様に、nビットの量子化器を有する実施形態では、同じチップの様々な画素に対して複数の異なる閾値を使用することができる。行く行くは、または照明条件に応じて閾値を変えることもできる。
【0083】
2種類の画素は、所与のパターンに応じて空間的にインタレースさせることができる。この場合、負の対数尤度関数は依然として凸関数であることを示すことができる。したがって、先の全ての技法を使用することができる。
【0084】
所与のセンサ上の(様々な閾値を有する)様々な種類の画素の構成は、最も優れた信号対雑音比を実現する、最適なパターンおよび様々な閾値の構成を実現するように設計することができる。
【0085】
最適なパターンを設計するために、以下の方法を使用することができる。画素の総数がN、最大閾値がQmax、およびa∈[0,amax]の場合。一例では、画素が2つの異なる閾値Q11およびQ12しか有さず、N1が閾値Q11を有する画素の数であり、N2=N−N1が閾値Q12を有する画素の数である。問題は、
【数54】
を最大化することができる最適なQ11,Q12,N1,N2は何かということである。これは、
【数55】
【0086】
この最適なパターン設計は、センサチップの設計中に1回だけ行い、変数の範囲が広くないので、この最適化問題を解くために徹底探索法を使用することができる。
【0087】
ここでは2つの閾値がある事例のみを検討するが、複数の閾値またはマルチレベル量子化器を有するより複雑な事例も同じ方法で行うことができる。
【0088】
単純な例を与える。amax=100、Qmax=9、およびN=100、M=1の場合。上記のアルゴリズムを使用して、最適なパターンは、N1=37画素がQ11=1を有し、N2=63画素がQ12=9を有する。
【0089】
1D画像および2D画像に関する実験結果は、空間的および/または時間的なオーバーサンプリング係数を増すことは、閾値Q1=1のとき装置および方法の性能を高めることを示している。光強度が大きい場合、小さいQ1ではセンサが飽和する、すなわち全ての画素値が「1」になる確率が高い。そのため光強度が大きい場合はより大きな閾値Q1が必要である。光強度が小さい場合、大きなQ1ではセンサが全て「0」の出力を有する確率が高く、このことは低い光強度に対してセンサを敏感でなくする。そのため光強度が小さい場合は小さなQ1が必要である。Q1>2が成立する場合、所与のγjについて最適な(NM)optが存在する。(NM)optよりも大きいNMは、より劣った性能を有する。
【0090】
図10は、1−D合成信号γの一例を示す。図11は、オーバーサンプリング係数N=100、および露光時間τ=1を用いた、アップサンプリングされ、ローパスフィルタリングされた信号λの一例を示す。図12は、閾値Q1=1、オーバーサンプリング係数N=100、および総露光時間τ=1を用いてカメラ/画像センサによって生成された2進シーケンスの一例を示す。図13は、閾値Q1=1、オーバーサンプリング係数N=100、露光回数M=1、および露光時間τ=1を用いた、1−D合成信号γならびに推定信号
【数56】
の一例を示す。
【0091】
上述の方法は、静止カメラもしくはビデオカメラ内、他の画像取得装置内、または適切な画像処理アプリケーションを有するコンピュータやワークステーションが含まれる任意の画像処理装置内の様々なハードウェアおよび/またはソフトウェアコンポーネントなど、これらの操作を実行できるどんな適切な手段によっても実行することができる。
【0092】
上述の方法および装置は、静止カメラやビデオカメラ、カメラ付き携帯電話、ウェブカメラなどの、消費者向け画像取得システム内で使用することができる。それらの方法および装置は、これだけに限定されないが、高ダイナミックレンジ写真、微光取得(天文学や夜の画像用)、DNA画像解析、クロマトグラフィなど、高ダイナミックレンジの静止画像およびビデオ画像を取得するのにとりわけ有用である。
【0093】
本願に記載した様々な等式および処理ステップは、汎用プロセッサ、デジタル信号プロセッサ(DSP)、特定用途向け集積回路(ASIC)、書替え可能ゲートアレイ(FPGA)、個別部品、またはそれらの任意の組合せによって実行されるソフトウェアによって実行することができる。装置は、レンズを含むカメラ、カメラ内の画像処理装置などの画像取得装置、または別個の装置(別個のコンピュータなど)、または静止画像もしくはビデオ画像を取得/処理するためにコンピュータと組み合わせてもしくは連続して使用されるカメラなど、その2つの間の組合せとすることができる。
【0094】
本願による方法のどんなステップも、ハードウェア、プロセッサによって実行されるソフトウェアモジュール、またはその2つの組合せによって実施することができる。したがって本発明は、本明細書に示した操作を実行するためのコンピュータプログラム製品にも関する。ソフトウェアによって実装する場合、記載した諸機能は1つまたは複数の命令としてコンピュータ可読媒体上に記憶することができる。使用することができる記憶媒体の一部の例には、ランダムアクセスメモリ(RAM)、読取専用メモリ(ROM)、フラッシュメモリ、EPROMメモリ、EEPROMメモリ、レジスタ、ハードディスク、リムーバブルディスク、他の光ディスク、またはコンピュータ、カメラ、もしくは画像取得装置によってアクセスされ得る任意の入手可能な媒体が含まれる。
【0095】
付録
【数57】
連鎖法則を適用することにより、次式を示すことができる。
【数58】
【0096】
【数59】
【数60】
のヘッセ行列は、H=GTAGであり、ただし以下の関係が成立する。
【数61】
証明:
連鎖法則によれば、次式が成立する。
【数62】
【0097】
【数63】
【数64】
が凸関数であることを証明するには、
【数65】
のヘッセ行列Hが半正定値であることを示せば十分である。ヘッセ行列を見ると、
【数66】
であることを証明する必要がある。
仮に
【数67】
とする。
表記を単純にするために、PQを用いて関数PQ(x)を示す。PQの一次導関数は、P’Q=PQ−1である。R’Q=RQ−1の一次導関数。PQ−PQ−1=RQ、および
【数68】
という等式も得られる。
Bk=0の場合、次式が成立し、
【数69】
Q1=1の場合、
【数70】
が成立する。
Q1=2の場合、
【数71】
となり、
【数72】
が成立する。
Q1≧3の場合は次式が成立し、
【数73】
Q≧3の場合、RQ−1PQ−RQPQ−1≧0も得られる(2)。
1≦Bk=1≦L−2の場合、次式が成立する。
【数74】
ここで、Q1+1はQ1よりも大きいものとする。
Q1=1、Q1+1=2の場合、次式が成立する。
【数75】
Q1=1、Q1+1≧3の場合、次式が成立する。
【数76】
等式(2)から、
【数77】
となることが分かる。
Q1≧2の場合、Q1+1≧3となり、次式が成立する。
【数78】
そのため、
【数79】
となる。
したがって、1≦Bk=1≦L−2が成立し、
Bk=L−1の場合、次式が得られる。
【数80】
QL−1=1の場合、
【数81】
が成立する。
QL−1≧2の場合、次式が成立する。
【数82】
そのため、Bk=L−1の場合、次式が成立する。
【数83】
上記の内容から、どんなBkについても次式が成立するという結論を下すことができる。
【数84】
そのため、L(γ)のヘッセ行列は半正定値であり、凸関数である。
【0098】
【数85】
【数86】
の勾配は、次式の通りである。
【数87】
証明:
連鎖法則によれば、次式が成立する。
【数88】
【0099】
【数89】
【数90】
のヘッセ行列は次式の通りであり、
【数91】
ただし以下の関係が成立する。
【数92】
証明:
連鎖法則によれば、次式が成立する。
【数93】
【0100】
【数94】
【数95】
が凸関数であることを証明するには、
【数96】
のヘッセ行列が半正定値であることを示せば十分である。ヘッセ行列を見ると、
【数97】
であることを証明する必要がある。これは
【数98】
の証明と同様に証明することができる。
【技術分野】
【0001】
発明の分野
本発明は、画像の取得及び変換のための方法に関する。本発明は、画像取得装置およびコンピュータプログラム製品にも関する。
【背景技術】
【0002】
関連技術の説明
図1aに、カメラまたは他の撮像システムの単純化した構造を示す。カメラは、列またはアレイを成す複数の画素20を含む画像センサ2の平面上への入射光の焦点を合わせるレンズ1を含む。画像センサ内の各画素20は光子を集め、その光子をアナログ電気信号に変換し、そのアナログ電気信号はA/D変換器などの量子化器により、例えば1ビット、8ビット、または12ビットに量子化される。画素に当たる光子の数は、ポアソン過程によりモデル化することができる。量子化器は、画素ごとに設けることができ、または複数の画素によって共用される読出し回路ごとに設けることができる。
【0003】
画像センサは、所与の露光時間の間の、およびある空間領域にわたる、光強度場の積分関数(integration function)をサンプリングするサンプリング装置とみなすことができる。カメラにおいて最も重要なパラメータの1つは、空間的なサンプリング間隔を決定する、画素のサイズである。
【0004】
回折限界により、レイリーの基準は、理想的なレンズの最小空間解像度を与える。レンズ1のインパルス応答は、点広がり関数(PSF)、図2に示すP(x)である。レンズには収差があり、理想的なレンズでさえ回折があるので、点広がり関数はディラックのデルタ関数ではなく、むしろこのレンズはゼロを上回る最小空間解像度を有するローパスフィルタの役割を果たす。
【0005】
図3に、レンズのモデルを一例として示す。レンズの前の光強度場はλ(x)であり、xは空間インデックスを表す。レンズのローパス効果により、レンズの後の光強度場は帯域制限され、λ(x)*P(x)に等しい(*は畳み込み作用素である)。
【0006】
CMOS技術におけるスケーリング効果のおかげで、消費者向けのカメラおよび他の撮像装置で使用される最先端の画素サイズは、多くの場合レンズの最小空間解像度よりも小さい。この場合、画像センサはオーバーサンプリング装置の役割を果たし、レンズによる帯域制限後の画像信号の帯域幅が必要とするよりも多くのサンプルを生成する。
【0007】
さらに、いわゆるギガピクセルカメラ(またはギガピクセルデジタルフィルム)も知られており、これらでは大きなオーバーサンプリング係数が使用される。ギガピクセルカメラの画像センサは、対数関数に似た非線形応答を有し、そのような応答はそれらの画像センサを、高ダイナミックレンジシーンを取得するのに非常に適したものにする。さらに、ギガピクセルカメラは通常、画素ごとに単一の光子検出器を有し、このことは、高感度の光子検出機構により微光状態における露光時間を短縮する。映像や写真、または例えば光の代わりにX線や他の波長を用いる医用画像を含む一般にどんな種類の画像を撮るためにも、ギガビジョンカメラを使用することができる。
【0008】
通常、ギガピクセルカメラ内の画素は、各画素の出力を2進値(黒または白)に変換するための1ビット量子化器を有する。したがって、ギガピクセルセンサによる画像出力は、非常に高い空間解像度を有するが、画素ごとに2つのレベルだけ、例えば2つの階調レベルしか有さない。その結果、ギガピクセルセンサの高解像度の2進出力を、より低い解像度だがより多くの階調レベルを有する画像信号に変換するための処理回路が必要である。
【0009】
一態様によれば、このようなわけで本発明は画像変換に関し、具体的にはオーバーサンプリングされたデジタル信号に基づくマルチレベル画像の推定値を再構築するための方法に関する。一部の実施形態では、本発明は、高解像度の2値画像信号をより低い解像度のマルチレベル信号に変換することに関する。別の実施形態では、本発明は、マルチレベル画像信号を各画素または一部の画素において異なる数のレベルを有しかつ/または異なる解像度を有する、別の信号に変換することにも関する。どんな画像センサによる1D、2D、またはN−D画像信号出力を変換するためにも、全ての実施形態を使用することができる。
【0010】
図4は、画像センサ2を概略的に示す。このセンサの働きは、レンズ1を通過する入射光をサンプリングすることである。k番目の画素によって生成される電子の数Skは、この画素に衝突する光子の数によって決まる。例えば画素の量子効率が「1」の場合、画素20が生成する電子の数は、この画素が受け取る光子の数に等しい。
【0011】
露光時間τの間、および画素幅Δxでは、k番目の画素によって生成される電子の数Skは、パラメータ
【数1】
を伴うポアソン分布に従い、
これは、露光時間の間に画素が生成する電子の平均数である。この分布は以下のように表すことができる。
【数2】
【0012】
図4に示すように、画像センサ2によって与えられる値は、カーネル関数f(x)によるレンズの後の信号λ(x)*P(x)の畳み込みと、その後に続く、
【数3】
における、その結果生じる関数
【数4】
のサンプリングである。次いで、量子化器を使用して電子の数を量子化し、以下の通り同じくランダム変数である画素値Bkをもたらす。
【数5】
【0013】
k番目の画素の開始位置はxk−1であり、終了位置はxkである。したがって、画素が受ける光の推定値
【数6】
は、次式の通りである。
【数7】
【0014】
量子化した後、画像センサ2は1組の数値B=[B1,B2,...,BK]Tをもたらし、b=[b1,b2,...,bK]Tは、ランダム変数Bの具現化(realization)である。
【0015】
したがって本発明の1つの狙いは、それらの量子化した画素値を所与として、光強度場
【数8】
の推定値をもたらすことである。
【0016】
具体的には、本発明の狙いは、オーバーサンプリング画像センサ、すなわち
【数9】
のナイキストレートよりも大きい空間周波数および/または時間周波数を有する画像センサの出力に基づいて光強度場
【数10】
を取得することである。
【0017】
ギガピクセルセンサの特別なケースでは、本発明の狙いは、センサによる2進のより高解像度の画像出力を使用して、(階調レベルを有する)従来の画像を再構築することである。
【0018】
ギガピクセルカメラなどのオーバーサンプリングカメラによってとられる量子化された測定から画像を再構築するための再構築法は従来技術で知られている。例えば、ブロック内で隣接する画素によって与えられる信号を追加し、または平均することが知られている。ギガピクセルカメラの場合、例えば隣接する画素のブロック内で2進値Bを合計することにより、階調レベルを示す多値信号を生成することが提案されている。画像センサの出力をローパスフィルタリングし、ダウンサンプルすることに基づく他の方法も知られている。この処理は画像センサの読出し回路内で通常行われ、またはカメラ内もしくはコンピュータ内の任意のデジタル画像処理システム、または捕捉画像を受け取って処理する他の処理システムによって行うことができる。
【0019】
この従来技術による手法の問題点は、ローパスフィルタリングおよびダウンサンプリングによる画像再構築の性能が悪く、または少なくとも最適ではないことである。
【0020】
従来技術の画像センサにおける1つの難点は、レベルを区別するために量子化器が用いる閾値Q1を決定することである。例えば光強度が高い場合、閾値Q1が大きいギガピクセルカメラは、閾値が小さいギガピクセルカメラよりもうまく機能する。光強度が低い場合、閾値Q1が小さいギガビジョンカメラは、閾値が大きいギガビジョンカメラよりもうまく機能する。マルチレベル画像を生成する画像センサにも同じ困難が当てはまる。
【発明の概要】
【発明が解決しようとする課題】
【0021】
したがって、より優れた画像品質を提供し、画像センサが生成する量子化値に基づいて入射光場のより優れた推定値をもたらす、改善された画像取得および再構築の方法および装置が求められている。
【0022】
カメラによってとられる量子化された測定から画像を再構築するための再構築アルゴリズムの速度を改善することも求められている。
【0023】
多重露光の下で画像を捕捉する際に、または大量の空間的オーバーサンプリングに伴って計算の複雑さが著しく高まることがない再構築法も求められている。
【課題を解決するための手段】
【0024】
本発明の再構築の方法および装置は、サンプリング理論の新規使用に部分的に基づく。この理論は、推定光強度場
【数11】
を、ナイキストレートにおけるサンプル
γj,J=1,2,...,Jから完璧に再構築できることを次式の通り知らせ、
【数12】
ただし
γj,J=1,2,...,Jはナイキストレートにおける推定光強度場
【数13】
のサンプルであり、φ(x)はカーネル関数であり、Xjはj番目の画素のサンプリング位置である。オーバーサンプリングレートは、
【数14】
である。
【0025】
サンプリング位置xk,K=1,2,...,Kを考慮に入れ、先の式を以下のようにデジタル形式で示すことができる。
【数15】
【0026】
画素サイズΔxがN倍に変わる場合、カーネル関数をこの倍率だけ変えればよいという仮定に基づき、上記の等式では記号「≒」を使用するが、それはカーネル関数が多くの場合理想的なものではなく近似に過ぎないからである。
【0027】
したがって本発明の一態様によれば、上述の狙いは、従来技術のように画像信号の変換が単に一連のローパスフィルタリング操作およびダウンサンプリング操作ではなく、むしろこの変換をデジタルサンプル値から信号を再構築すること、例えばナイキストレートを上回るサンプリングレートでとるデジタル値から信号を再構築することであって、光学系および電子システム全体の特性、とりわけレンズの特性を考慮に入れる、再構築することとみなす方法によって達成される。
【0028】
上述の狙いはさらに、
画像の取得及び変換のための方法であって、
取得レンズにより、画像をローパスフィルタリングする(またはより広くは変換関数を使って変換する)ステップと、
画像センサを使用し、アップサンプリング係数を用いて、前述のローパスフィルタリングされた画像から、第1の解像度を有するアップサンプリングされた画像を生成するステップと、
画像処理回路を用いて、前述のアップサンプリングされた画像を、前述の第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するステップと
を含み、
前述の変換するステップが、前述のレンズの前述のローパスフィルタリングおよび前述のアップサンプリング係数に依拠する、
方法によって達成される。
【0029】
再構築はレンズの伝達関数およびオーバーサンプリング係数に依拠し、よって、システム全体の最適化および改善された画像品質をもたらす。
【0030】
この再構築プロセスによって与えられる出力は、典型的にはマルチレベル画像、すなわちグレースケールやカラー画像など、画素ごとに3つ以上のあり得る異なる値を有する画像である。
【0031】
一実施形態では、アップサンプリングされた画像は、2進のアップサンプリングされた画像を出力するギガピクセル画像センサを用いて生成される。
【0032】
一実施形態では、センサの量子化器が空間的に変化する構成を含む。例えば1ビット量子化器の場合、センサ上のある画素群が閾値Q1=1を有し、残りの画素がより高い閾値または様々な異なる閾値を有することができる。
【0033】
有利には、マルチレベル画像への変換は、最尤推定法を実施する方法および回路によって行われる。
【0034】
一態様によれば、本発明は、負の対数尤度関数が凸関数であるという発見に基づき、このことは、とりわけ量子化器の閾値Qが「1」の場合に当てはまるが、閾値が「1」ではなく、量子化器がマルチレベル測定値Bを生成するための複数の閾値を有する場合にも当てはまる。したがって、凸最適化を使用して最適な解決策を実現することができる。
【0035】
一実施形態では、取得した画像ごとに少なくとも2回の露光を行い、その結果、時間的(temporal)オーバーサンプリングおよび画像ごとに使用されるより多くのサンプルをもたらす。計算上の複雑さを著しく高めることなしに多重露光を使用できるようにする方法について記載する。
【0036】
一態様によれば、この再構築法は、負の対数尤度関数の勾配、およびベクトルとヘッセ行列との乗算を計算するためのフィルタバンク技法に基づく最大尤度法を使用する。フィルタバンク技法を使用することは高速処理をもたらす。
【0037】
有利には、計算速度を上げるために、信号および作用素の多相表現または改善された別の表現を使用する。
【0038】
本発明による方法の重要な利点は、レンズのローパスフィルタリング関数およびギガビジョンセンサのアップサンプリング関数を活用して、およびそれらに依拠して画像を再構築できるようにすることである。
【0039】
有利には、センサによって出力される測定から画像を再構築することは、DSPエレメントによって、FPGAコンポーネントによって、カメラ内またはコンピュータ内のマイクロプロセッサもしくはマイクロコントローラによって行うことができる。例えばこの方法の中で使用する最尤推定は、この一覧の中の手段によって実行することができ、または他の任意の適切なハードウェアもしくはソフトウェアの手段によって実行することができる。
【0040】
このために、画像を処理する間の画像確立(image elaboration)プログラムは、カメラのセンサおよびレンズを考慮に入れる。別の実施形態では、再構築をカメラの外部にある画像処理装置、例えばコンピュータが実行する画像処理ソフトウェアや、カメラが出力する画像ファイルを受け取って処理するIT装置によって行う。本発明は、本願に記載の方法を処理システムに実行させるためのコンピュータプログラムを有形かつ永続的に記憶するコンピュータプログラム製品にも関する。
【0041】
本発明は、例として図面によって示される実施形態の記載により、よりよく理解される。
【図面の簡単な説明】
【0042】
【図1a】カメラの単純化した構造を示す。入射光がレンズによって焦点を合わせられ、画像センサ上に衝突する。その後、画像センサ内の各画素が受け取った光子を電子に変換する。
【図1b】カメラおよび追加の画像処理手段を含む画像取得装置の単純化した構造を示す。
【図2】レンズの点広がり関数の一例を示す。
【図3】レンズのモデルを示す。レンズは、インパルス応答P(x)を有する線形システムとしてモデル化される。光強度場λ(x)がレンズを通過した結果がλ(x)*P(x)である。
【図4】電子の数を量子化し、画素値Bk,k=1,2,...,Kをもたらすために、レベルQ1,Q2,...,QL−1を有するLレベルの量子化器を使用する画像センサのモデルを示す。
【図5】本発明のカメラについてのモデルの一例を示す。γ=[γ1,γ2,...,γJ]Tは、ナイキストレートにおける
【数16】
のサンプルである。Nはアップサンプリング係数である。g[n]はローパスフィルタである。
【数17】
は
【数18】
のオーバーサンプリングされたサンプルである。B=[B1,B2,...,BK]Tは、量子化された画素値であり、b=[b1,b2,...,bK]TはBの具現化である。
【数19】
は
【数20】
の再構築された値である。
【図6】アップサンプリングおよびローパスフィルタリング作用素Gを示す。
【図7】ローパスフィルタリングおよびダウンサンプリングのための作用素GTを示す。
【図8】L(γ)のヘッセ行列Hvにベクトルvを掛ける計算の図を示す。g[n]およびg[−n]はローパスフィルタである。
【図9】シーケンスx[k](左)およびフィルタg[k](右)の多相表現を示す。
【図10】1−D合成信号γの一例を示す。
【図11】オーバーサンプリング係数N=100、および露光時間τ=1を用いた、アップサンプリングされ、ローパスフィルタリングされた信号
【数21】
の一例を示す。
【図12】閾値Q1=1、オーバーサンプリング係数N=100、および総露光時間τ=1を用いてカメラによって生成された2進シーケンスの一例を示す。
【図13】閾値Q1=1、オーバーサンプリング係数N=100、露光回数M=1、および露光時間τ=1を用いた、1−D合成信号γならびに推定信号
【数22】
の一例を示す。
【発明を実施するための形態】
【0043】
発明の可能な実施形態の詳細な説明
表記を単純にするために、1次元(1−D)センサアレイの特定の事例をより詳しく説明する。あらゆる結果および解説を二次元(2−D)の事例、またはN次元の事例にさえも拡張することができ、N次元の事例では追加の次元が、例えば三次元画像センサによって、またはカメラのネットワークによって与えられる奥行き(画像センサまでの距離)に相当することができる。さらにこの方法および装置は、写真および/またはビデオ画像などの静止画を処理するために使用することができる。
【0044】
図1bに、画像取得装置の単純化した構造を示す。このシステムは、レンズ1および画素20を有する画像センサ2を含む、図1aに関連して記載したのと同様のカメラを含む。レンズおよび画像センサは、多くのコンパクトカメラにあるように一体型とすることができ、またはレフ型カメラにあるように脱着式とすることもできる。レンズは、超薄型カメラを実現するためのレンズアレイとすることができる。一例では、各画素がアバランシェフォトダイオードの周りに構築され、単一の光子検出器として機能する。CMOS画像センサやCCD画像センサなどの従来の画像センサ、ならびに赤外線センサ、X線センサ、または電磁信号を受け取るときに電荷を発生させることができる他のセンサも使用することができる。
【0045】
参照番号22は、画素の出力をデジタル値に変換するための量子化回路を示す。この量子化器は各画素の一部とすることができ、その場合それらの画素は、露光時間の間に受け取る光子の数に応じたデジタル値、例えば2進値や整数値を直接送り出す。別の実施形態では、量子化回路が、複数の画素によって出力される信号を処理し、量子化するように構成される読出し回路の一部である。単一の画像センサにいくつかの量子化回路を関連させてもよい。
【0046】
一実施形態では各量子化器が単一の閾値Qを有し、その場合、その量子化器によって与えられる出力信号は2進であり、画素によってもたらされる電子の数がこの閾値を上回る場合、出力信号の値は1であり、さもなければ0である。
【0047】
別の実施形態では、量子化器が、複数のレベルQ1,Q2,...,QL−1を有するLレベルの量子化器4であり、レベル間の閾値は等距離でもそうでなくてもよく、量子化器は、K画素それぞれの階調レベルを示すマルチレベル画素値Bk,K=1,2,...,Kをもたらす。以下に説明するように、異なる数の閾値を有しかつ/または閾値間の様々な距離を有する様々な量子化器を単一の画像センサに関連させることができる。
【0048】
図1bの参照23は、1つまたは複数の量子化器22によって与えられる量子化された画素値Bを処理するための処理回路を示す。この処理回路は、マイクロプロセッサ、マイクロコントローラ、デジタル処理回路、FPGA、asic等の周りに構築することができる。この処理回路はメモリ、例えば処理回路によって実行されるソフトウェア(bios)、および処理回路23によって与えられる処理済み画像を記憶するための、例えばフラッシュメモリなどの半永久メモリ25に接続される。この処理回路は、以下に記載する再構築法を使用して、画像センサ22によって与えられる画像信号をより低解像度の画像ファイルに変換するためのプログラムまたは関数を実行する。それらの再構築法は、カメラの外部、例えばパーソナルコンピュータ7、ワークステーション、サーバ、または画像センサがもたらすオーバーサンプリングされたサンプルを受け取って処理することができる他の任意のITシステム内で実行されるプログラムにより、全体的にまたは部分的に実行することもできる。
【0049】
再構築はレンズの伝達関数および画像センサが使用するオーバーサンプリング係数に依拠するので、再構築を行う処理回路23はそれらのパラメータを知っておく必要がある。レンズがこの処理回路と一体でない場合、使用されるレンズの種類またはレンズの伝達関数を画像ファイル内のメタデータとして示すことができ、またはユーザが入力することができ、または例えばナレッジデータベースから取得することができ、または事前に知っておくことができる。オーバーサンプリング係数は通常、例えばサンプルの数bを求めることによって画像ファイルから取得することができる。
【0050】
図5は、本発明の装置の別のブロック図である。光強度場γ=[γ1,γ2,...,γJ]Tが、カメラセンサ2により、係数Nによって空間的に(および/または時間的に)アップサンプルされ、レンズ1に相当するローパスフィルタg[n]によってフィルタリングされ、その結果、
【数23】
のオーバーサンプリングされたサンプルをもたらす。画像センサの出力部における光強度場
【数24】
とレンズの前の光強度場γとの間の関係を
【数25】
と示すことができ、ただしG=[g1,g2,...,gk]Tは、図6に示すアップサンプリングおよびローパスフィルタリング作用素を表すK×J行列である。
【0051】
次いで量子化器22が、量子化された画素値Bを生成する。最後に、カメラ内またはデジタル処理システム内のデジタル処理手段23が再構築アルゴリズムを実行して、光強度場の推定値
【数26】
を得る。
【0052】
再構築の狙いは、光強度場の推定値
【数27】
を計算することである。本発明の一態様によれば、デジタル処理手段23が実行する再構築法は、再構築問題を解き、以下のように
【数28】
を計算するために、最尤推定量(MLE)または他の最尤推定手段を使用する。
【数29】
【0053】
それらの関係は、以下の発見に基づく。(1)では、λKが与えられるときの各画素の独立性を使用し、(2)では、対数関数1nが最大化問題の解を変えないことを使用し、(3)では、関数を最大化する解が、対応する陰関数の最小化に等しい特性を使用する。
【0054】
各画素kについて、負の対数尤度関数L(γ)を
【数30】
として示すことができ、その結果
【数31】
となる。
【0055】
たとえ量子化器がマルチレベル量子化器でも、L(γ)が凸関数であることを論証することができる。論証は付録の中で見ることができる。
【0056】
空間的オーバーサンプリングに加えて、またはその代わりに、各期間[0,τ]の間にM枚の写真を撮ることにより、時間的オーバーサンプリングを行うことも可能である。この例では全ての写真を同じ露光時間
【数32】
で撮るが、別の露光時間を考えてもよい。
【0057】
仮に
【数33】
を画像センサ用の新たなパラメータ関数とした場合、次式
【数34】
が成立し、これは各露光について同じである。そのようにして、元のパラメータ関数をM倍スケールダウンさせる。すると次式
【数35】
および
【数36】
が成立する。仮にB=[Bl,B2,...,BM]とし、ただしBm,[Bml,Bm2,...,BmK]T、M=1,2,...,Mは、m番目の露光中に出力される画素値であり、Bmk,K=1,2,...,Kは、m番目の露光中のk番目の画素の画素値である。γを推定するための最尤推定量(MLE)は次式の通りである。
【数37】
【0058】
したがって推定量は、以下の発見を使用する。(1)では、関係はλkが与えられるときの各画素の独立性に基づき、(2)では、推定量は1nが最大化問題の解を変えないことを使用し、(3)では、推定量は関数を最大化する解が、対応する陰関数を最小化するのに等しい特性を使用する。
【0059】
したがって先の等式により、次式
【数38】
が成立し、ただし
【数39】
は、次式のように負の対数尤度関数である。
【数40】
【0060】
仮に
【数41】
とした場合、次式が成立する。
【数42】
【0061】
複数の連続した露光では、単一の露光の場合と同様に
【数43】
が凸関数であることを論証することができる(付録を参照されたい)。したがって、負の対数尤度関数は凸関数なので、推定量は、例えば内点法、信頼領域法、ニュートン法のような、凸最適化問題を解くための任意の方法を使用することができる。有利には、この方法は、解を見つけるのに必要な計算時間および計算能力を減らすように選択する。
【0062】
一実施形態では、推定量が、露光が1回の事例において入射光を推定するために、以下の修正されたニュートン法を使用する。当業者は、多重露光の事例にもこの方法を適用することができる。あり得る擬似コードは以下の通りである。
【数44】
【0063】
問題は、ヘッセ行列のサイズ∇2L(γ)が非常に大きく、そのためこの行列の逆を計算するにはかなりの処理能力および処理時間が必要である。一態様によれば、この計算時間を減らすために、本システムは共役勾配法を実行し、∇2L(γ)-1∇L(γ)を直接計算するようにプログラムされる。
【0064】
ニュートン法、内点法、信頼領域法のような凸最適化問題を解くための最も知られている方法では、負の対数尤度関数の勾配を与え、ベクトルとのヘッセ行列の乗算を行う必要がある。
【0065】
本発明の方法で使用する方法は、負の対数尤度関数L(γ)の勾配が
【数45】
であり、L(γ)のヘッセ行列がH=GTAGであるという発見にも基づいており、ただし以下の関係が成立する。
【数46】
【0066】
上記の2つの等式の問題点は、アップサンプリング係数が大きい場合、行列Gは大きく、それを記憶するために莫大な記憶空間が必要になることである。
【0067】
しかし、作用素Gはレンズおよび画像センサのアップサンプリング部分に相当し、行列全体を記憶する必要はない。アップサンプリングおよびローパスフィルタリング作用素のパラメータ、すなわちアップサンプリング係数Nおよびローパスフィルタg[n]の係数さえ分かればよい。レンズのローパスフィルタの係数はレンズの記憶域内に記憶し、変換を行う処理手段に伝送することができる。別の実施形態では、それらの係数が処理手段によって事前に知られている。例えば、処理手段は、使用されるレンズの特性を前もって知っている。さらに別の実施形態では、処理手段は、自らが受け取るレンズの種類の識別情報に基づき、それらの特性を取得する。
【0068】
G=LUと示すことができ、ただしLはローパスフィルタリング作用素を示し、Uはアップサンプリング作用素を示す。すると次式が成立し、GT=(LU)T=UTLT=DR、ただしDはダウンサンプリング作用素の行列表記法であり、Rはローパスフィルタリング作用素の行列表記法である。Dのダウンサンプリング係数は、Uのアップサンプリング係数に等しい。Lのフィルタ係数がg[n]の場合、Rのフィルタ係数はg[−n]である。対称ローパスフィルタの場合、LおよびRのフィルタ係数は同じである。図7は、ローパスフィルタリングおよびダウンサンプリング作用素GTの行列を示す。
【0069】
【数47】
の勾配は、まずベクトルL
【数48】
をローパスフィルタリングし、次いでそれを係数Nによってダウンサンプリングすることで計算することができる。
【0070】
負の対数尤度関数のヘッセ行列H掛けるベクトルvはHv=GT AGvである。図8は、上記の等式を計算するための図を示す。アップサンプリング係数Nを使ってベクトルvをアップサンプリングし、次いで、フィルタg[n]を使用してそれをローパスフィルタリングする。
【0071】
行列Aは対角行列なので、AとベクトルGvとの乗算は、AとGvとの対角線の要素ごと乗算(elementwise multiplication)に等しい。その後、得たベクトルを処理手段がフィルタg[−n]を使ってローパスフィルタリングし、N倍にダウンサンプリングしてHvを得る。
【0072】
結果として、処理手段は測定されたサンプルから画像信号を再構築することができる。
【0073】
本発明の一態様によれば、最適化プロセスの速度をさらに上げるために、多相表現を使用してアップサンプリングおよびダウンサンプリング作用素の計算時間を減らすことができる。シーケンスおよびフィルタのために様々な多相表現を定めることができる。
【0074】
次式に定めるように、1−Dシーケンスx[k]またはフィルタg[k]をNの多相成分に分解することができる。
【数49】
【0075】
図9は、シーケンスx[k](左部)およびフィルタg[k](右部)の多相表現を概略的に示す。次式のように、z領域におけるこの多相表現を計算することもできる。
【数50】
【0076】
仮にY(z)を、信号x[k]に対してローパスフィルタリングおよびダウンサンプリング作用素を実施する場合の出力であるシーケンスy[k]のz変換とした場合、次式が得られる。
【数51】
【0077】
これは、シーケンスx[k]に対して作用素を実施するプロセスが、フィルタおよびシーケンスをNの多相成分に分解し、シーケンスのn番目の多相成分を、対応するフィルタのn番目の多相成分とは別にフィルタリングし、フィルタリングした全ての結果を合計してy[k]を生成することを意味する。
【0078】
このプロセスの間、処理手段はダウンサンプリングプロセス中に廃棄されるシーケンス値を計算しないようにし、その結果計算時間を節約することができる。
【0079】
g[k]をシーケンスに関する多相表現の定義を使って分解する場合、次式が成立する。
【数52】
そして、x[k]に対してアップサンプリングおよびローパスフィルタリング作用素を実施する出力は以下のように示すことができる。
【数53】
ここで、Yn(Z)は、出力シーケンスy[k]のn番目の多相成分のz変換である。
【0080】
この方法を使用して、処理手段はフィルタ係数とアップサンプリングプロセス中に生成される「0」との乗算を計算しないようにし、それにより速度をN倍に上げる。
【0081】
分析により、1ビット量子化器の事例では、より低い閾値Q1が微光状況において僅かな推定誤りをもたらすが、より高い閾値がより適している光強度が高い領域ではうまく機能しないことも分かった。
【0082】
適切な閾値の問題に対処するために、一実施形態では、センサの量子化器が空間的に変化する構成を有する。例えば1ビット量子化器を使用する一実施形態では、センサ上の第1の画素群が閾値Q1=1を有する一方で、他の画素はより高い閾値を有する。同様に、nビットの量子化器を有する実施形態では、同じチップの様々な画素に対して複数の異なる閾値を使用することができる。行く行くは、または照明条件に応じて閾値を変えることもできる。
【0083】
2種類の画素は、所与のパターンに応じて空間的にインタレースさせることができる。この場合、負の対数尤度関数は依然として凸関数であることを示すことができる。したがって、先の全ての技法を使用することができる。
【0084】
所与のセンサ上の(様々な閾値を有する)様々な種類の画素の構成は、最も優れた信号対雑音比を実現する、最適なパターンおよび様々な閾値の構成を実現するように設計することができる。
【0085】
最適なパターンを設計するために、以下の方法を使用することができる。画素の総数がN、最大閾値がQmax、およびa∈[0,amax]の場合。一例では、画素が2つの異なる閾値Q11およびQ12しか有さず、N1が閾値Q11を有する画素の数であり、N2=N−N1が閾値Q12を有する画素の数である。問題は、
【数54】
を最大化することができる最適なQ11,Q12,N1,N2は何かということである。これは、
【数55】
【0086】
この最適なパターン設計は、センサチップの設計中に1回だけ行い、変数の範囲が広くないので、この最適化問題を解くために徹底探索法を使用することができる。
【0087】
ここでは2つの閾値がある事例のみを検討するが、複数の閾値またはマルチレベル量子化器を有するより複雑な事例も同じ方法で行うことができる。
【0088】
単純な例を与える。amax=100、Qmax=9、およびN=100、M=1の場合。上記のアルゴリズムを使用して、最適なパターンは、N1=37画素がQ11=1を有し、N2=63画素がQ12=9を有する。
【0089】
1D画像および2D画像に関する実験結果は、空間的および/または時間的なオーバーサンプリング係数を増すことは、閾値Q1=1のとき装置および方法の性能を高めることを示している。光強度が大きい場合、小さいQ1ではセンサが飽和する、すなわち全ての画素値が「1」になる確率が高い。そのため光強度が大きい場合はより大きな閾値Q1が必要である。光強度が小さい場合、大きなQ1ではセンサが全て「0」の出力を有する確率が高く、このことは低い光強度に対してセンサを敏感でなくする。そのため光強度が小さい場合は小さなQ1が必要である。Q1>2が成立する場合、所与のγjについて最適な(NM)optが存在する。(NM)optよりも大きいNMは、より劣った性能を有する。
【0090】
図10は、1−D合成信号γの一例を示す。図11は、オーバーサンプリング係数N=100、および露光時間τ=1を用いた、アップサンプリングされ、ローパスフィルタリングされた信号λの一例を示す。図12は、閾値Q1=1、オーバーサンプリング係数N=100、および総露光時間τ=1を用いてカメラ/画像センサによって生成された2進シーケンスの一例を示す。図13は、閾値Q1=1、オーバーサンプリング係数N=100、露光回数M=1、および露光時間τ=1を用いた、1−D合成信号γならびに推定信号
【数56】
の一例を示す。
【0091】
上述の方法は、静止カメラもしくはビデオカメラ内、他の画像取得装置内、または適切な画像処理アプリケーションを有するコンピュータやワークステーションが含まれる任意の画像処理装置内の様々なハードウェアおよび/またはソフトウェアコンポーネントなど、これらの操作を実行できるどんな適切な手段によっても実行することができる。
【0092】
上述の方法および装置は、静止カメラやビデオカメラ、カメラ付き携帯電話、ウェブカメラなどの、消費者向け画像取得システム内で使用することができる。それらの方法および装置は、これだけに限定されないが、高ダイナミックレンジ写真、微光取得(天文学や夜の画像用)、DNA画像解析、クロマトグラフィなど、高ダイナミックレンジの静止画像およびビデオ画像を取得するのにとりわけ有用である。
【0093】
本願に記載した様々な等式および処理ステップは、汎用プロセッサ、デジタル信号プロセッサ(DSP)、特定用途向け集積回路(ASIC)、書替え可能ゲートアレイ(FPGA)、個別部品、またはそれらの任意の組合せによって実行されるソフトウェアによって実行することができる。装置は、レンズを含むカメラ、カメラ内の画像処理装置などの画像取得装置、または別個の装置(別個のコンピュータなど)、または静止画像もしくはビデオ画像を取得/処理するためにコンピュータと組み合わせてもしくは連続して使用されるカメラなど、その2つの間の組合せとすることができる。
【0094】
本願による方法のどんなステップも、ハードウェア、プロセッサによって実行されるソフトウェアモジュール、またはその2つの組合せによって実施することができる。したがって本発明は、本明細書に示した操作を実行するためのコンピュータプログラム製品にも関する。ソフトウェアによって実装する場合、記載した諸機能は1つまたは複数の命令としてコンピュータ可読媒体上に記憶することができる。使用することができる記憶媒体の一部の例には、ランダムアクセスメモリ(RAM)、読取専用メモリ(ROM)、フラッシュメモリ、EPROMメモリ、EEPROMメモリ、レジスタ、ハードディスク、リムーバブルディスク、他の光ディスク、またはコンピュータ、カメラ、もしくは画像取得装置によってアクセスされ得る任意の入手可能な媒体が含まれる。
【0095】
付録
【数57】
連鎖法則を適用することにより、次式を示すことができる。
【数58】
【0096】
【数59】
【数60】
のヘッセ行列は、H=GTAGであり、ただし以下の関係が成立する。
【数61】
証明:
連鎖法則によれば、次式が成立する。
【数62】
【0097】
【数63】
【数64】
が凸関数であることを証明するには、
【数65】
のヘッセ行列Hが半正定値であることを示せば十分である。ヘッセ行列を見ると、
【数66】
であることを証明する必要がある。
仮に
【数67】
とする。
表記を単純にするために、PQを用いて関数PQ(x)を示す。PQの一次導関数は、P’Q=PQ−1である。R’Q=RQ−1の一次導関数。PQ−PQ−1=RQ、および
【数68】
という等式も得られる。
Bk=0の場合、次式が成立し、
【数69】
Q1=1の場合、
【数70】
が成立する。
Q1=2の場合、
【数71】
となり、
【数72】
が成立する。
Q1≧3の場合は次式が成立し、
【数73】
Q≧3の場合、RQ−1PQ−RQPQ−1≧0も得られる(2)。
1≦Bk=1≦L−2の場合、次式が成立する。
【数74】
ここで、Q1+1はQ1よりも大きいものとする。
Q1=1、Q1+1=2の場合、次式が成立する。
【数75】
Q1=1、Q1+1≧3の場合、次式が成立する。
【数76】
等式(2)から、
【数77】
となることが分かる。
Q1≧2の場合、Q1+1≧3となり、次式が成立する。
【数78】
そのため、
【数79】
となる。
したがって、1≦Bk=1≦L−2が成立し、
Bk=L−1の場合、次式が得られる。
【数80】
QL−1=1の場合、
【数81】
が成立する。
QL−1≧2の場合、次式が成立する。
【数82】
そのため、Bk=L−1の場合、次式が成立する。
【数83】
上記の内容から、どんなBkについても次式が成立するという結論を下すことができる。
【数84】
そのため、L(γ)のヘッセ行列は半正定値であり、凸関数である。
【0098】
【数85】
【数86】
の勾配は、次式の通りである。
【数87】
証明:
連鎖法則によれば、次式が成立する。
【数88】
【0099】
【数89】
【数90】
のヘッセ行列は次式の通りであり、
【数91】
ただし以下の関係が成立する。
【数92】
証明:
連鎖法則によれば、次式が成立する。
【数93】
【0100】
【数94】
【数95】
が凸関数であることを証明するには、
【数96】
のヘッセ行列が半正定値であることを示せば十分である。ヘッセ行列を見ると、
【数97】
であることを証明する必要がある。これは
【数98】
の証明と同様に証明することができる。
【特許請求の範囲】
【請求項1】
画像の取得及び変換のための方法であって、
取得レンズにより、画像をローパスフィルタリングするステップと、
画像センサを使用し、アップサンプリング係数を用いて、前記ローパスフィルタリングされた画像から、第1の解像度を有するアップサンプリングされた画像を生成するステップと、
画像処理回路を用いて、前記アップサンプリングされた画像を、前記第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するステップとを含み、
前記変換するステップが、前記レンズの前記ローパスフィルタリングおよび前記アップサンプリング係数に依拠する、
方法。
【請求項2】
前記アップサンプリングされた画像が、2進のアップサンプリングされた画像を出力するギガピクセル画像センサを用いて生成される、請求項1に記載の方法。
【請求項3】
前記変換するステップが、前記ローパスフィルタリングされた画像に基づいて光強度場の推定値
【数1】
を計算するステップを含み、前記推定値を計算するために最尤推定量(MLE)が使用される、請求項1に記載の方法。
【請求項4】
前記最尤推定量を計算するために、ニュートン法または修正されたニュートン法を使用するステップを含む、請求項3に記載の方法。
【請求項5】
時間的オーバーサンプリングをもたらす複数の連続した露光から1つの画像を再構築する、請求項3に記載の方法。
【請求項6】
計算速度を上げるために、信号および/または作用素の多相表現を使用する、請求項3に記載の方法。
【請求項7】
共役勾配法を実行するステップを含む、請求項3に記載の方法。
【請求項8】
同じ画像センサ上の、様々な光感度閾値を有する画素を使用するステップを含む、請求項1から7のいずれか1項に記載の方法。
【請求項9】
ローパスフィルタリング関数を有するレンズと、
アップサンプリング係数を使ってアップサンプリングされた画像を生成する、第1の解像度を有する画像センサと、
前記画像を、前記第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するための画像処理回路と
を備え、
前記画像処理回路が、前記レンズの前記ローパスフィルタリング関数および前記アップサンプリング係数に依拠する、
画像取得装置。
【請求項10】
前記画像センサが、2進のアップサンプリングされた画像を生成するように構成される2進センサである、請求項9に記載の画像取得装置。
【請求項11】
前記画像処理回路が、前記ローパスフィルタリングされた画像に基づいて光強度場の推定値を計算するように構成され、前記装置が、前記推定値を計算するように構成される最尤推定量(MLE)を含む、請求項9に記載の画像取得装置。
【請求項12】
負の対数尤度関数の勾配、およびベクトルとヘッセ行列との乗算を計算するように構成されるフィルタバンクを含む、請求項11に記載の画像取得装置。
【請求項13】
複数の連続した露光から1つの画像を再構築するように構成される、請求項9に記載の画像取得装置。
【請求項14】
前記装置が静止カメラまたはビデオカメラである、請求項11に記載の画像取得装置。
【請求項15】
前記画像センサが、様々な光感度閾値を有する画素のパターンを含む、請求項9に記載の画像取得装置。
【請求項16】
コンピュータ可読媒体を含む、信号処理のためのコンピュータプログラム製品であって、前記コンピュータ可読媒体は、
画像を第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するために、レンズが取得する前記画像をアップサンプリング係数を用いてアップサンプリングする画像センサが生成する、前記第1の解像度を有するアップサンプリングされた画像を処理するために実行可能な命令を含み、
前記変換するステップが、前記レンズのローパスフィルタリングおよび前記アップサンプリング係数に依拠する、
コンピュータプログラム製品。
【請求項17】
前記画像処理回路が、最尤推定(MLE)法を実施する、請求項16に記載のコンピュータプログラム製品。
【請求項18】
取得した画像ごとに少なくとも2回の露光が行われる、請求項17に記載のコンピュータプログラム製品。
【請求項19】
前記命令が、カメラ内のプロセッサによって実行可能である、請求項17に記載のコンピュータプログラム製品。
【請求項20】
画像センサによってとられる測定から画像を再構築するための方法であって、
オーバーサンプリングされた光強度値を得るために、光強度場を、レンズを使ってフィルタリングし、画像センサを使ってアップサンプリングするステップと、
最尤推定を使用して、前記再構築された画像を生成するために、前記オーバーサンプリングされた光強度値を処理するステップと
を含む、方法。
【請求項21】
前記処理は、凸最適化問題を解くための高速アルゴリズムを使用するために、前記画像センサの閾値が1に正規化される場合、前記最尤推定の負の対数尤度関数の凸性を活用する、請求項20に記載の方法。
【請求項22】
前記画像センサが、2値画像を生成する2値画像センサである、請求項20に記載の方法。
【請求項23】
2進測定から画像を再構築するためのシステムであって、
オーバーサンプリングされた光強度値を得るために、サンプリングされた光強度係数値を、アップサンプリング係数を使ってアップサンプリングするための、第1のローパスフィルタおよびアップサンプリング画像センサと、
最尤推定を使用して、前記再構築された画像を生成するために、前記オーバーサンプリングされた光強度値を処理するための回路と
を含む、システム。
【請求項1】
画像の取得及び変換のための方法であって、
取得レンズにより、画像をローパスフィルタリングするステップと、
画像センサを使用し、アップサンプリング係数を用いて、前記ローパスフィルタリングされた画像から、第1の解像度を有するアップサンプリングされた画像を生成するステップと、
画像処理回路を用いて、前記アップサンプリングされた画像を、前記第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するステップとを含み、
前記変換するステップが、前記レンズの前記ローパスフィルタリングおよび前記アップサンプリング係数に依拠する、
方法。
【請求項2】
前記アップサンプリングされた画像が、2進のアップサンプリングされた画像を出力するギガピクセル画像センサを用いて生成される、請求項1に記載の方法。
【請求項3】
前記変換するステップが、前記ローパスフィルタリングされた画像に基づいて光強度場の推定値
【数1】
を計算するステップを含み、前記推定値を計算するために最尤推定量(MLE)が使用される、請求項1に記載の方法。
【請求項4】
前記最尤推定量を計算するために、ニュートン法または修正されたニュートン法を使用するステップを含む、請求項3に記載の方法。
【請求項5】
時間的オーバーサンプリングをもたらす複数の連続した露光から1つの画像を再構築する、請求項3に記載の方法。
【請求項6】
計算速度を上げるために、信号および/または作用素の多相表現を使用する、請求項3に記載の方法。
【請求項7】
共役勾配法を実行するステップを含む、請求項3に記載の方法。
【請求項8】
同じ画像センサ上の、様々な光感度閾値を有する画素を使用するステップを含む、請求項1から7のいずれか1項に記載の方法。
【請求項9】
ローパスフィルタリング関数を有するレンズと、
アップサンプリング係数を使ってアップサンプリングされた画像を生成する、第1の解像度を有する画像センサと、
前記画像を、前記第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するための画像処理回路と
を備え、
前記画像処理回路が、前記レンズの前記ローパスフィルタリング関数および前記アップサンプリング係数に依拠する、
画像取得装置。
【請求項10】
前記画像センサが、2進のアップサンプリングされた画像を生成するように構成される2進センサである、請求項9に記載の画像取得装置。
【請求項11】
前記画像処理回路が、前記ローパスフィルタリングされた画像に基づいて光強度場の推定値を計算するように構成され、前記装置が、前記推定値を計算するように構成される最尤推定量(MLE)を含む、請求項9に記載の画像取得装置。
【請求項12】
負の対数尤度関数の勾配、およびベクトルとヘッセ行列との乗算を計算するように構成されるフィルタバンクを含む、請求項11に記載の画像取得装置。
【請求項13】
複数の連続した露光から1つの画像を再構築するように構成される、請求項9に記載の画像取得装置。
【請求項14】
前記装置が静止カメラまたはビデオカメラである、請求項11に記載の画像取得装置。
【請求項15】
前記画像センサが、様々な光感度閾値を有する画素のパターンを含む、請求項9に記載の画像取得装置。
【請求項16】
コンピュータ可読媒体を含む、信号処理のためのコンピュータプログラム製品であって、前記コンピュータ可読媒体は、
画像を第1の解像度よりも低い第2の解像度を有するマルチレベル画像に変換するために、レンズが取得する前記画像をアップサンプリング係数を用いてアップサンプリングする画像センサが生成する、前記第1の解像度を有するアップサンプリングされた画像を処理するために実行可能な命令を含み、
前記変換するステップが、前記レンズのローパスフィルタリングおよび前記アップサンプリング係数に依拠する、
コンピュータプログラム製品。
【請求項17】
前記画像処理回路が、最尤推定(MLE)法を実施する、請求項16に記載のコンピュータプログラム製品。
【請求項18】
取得した画像ごとに少なくとも2回の露光が行われる、請求項17に記載のコンピュータプログラム製品。
【請求項19】
前記命令が、カメラ内のプロセッサによって実行可能である、請求項17に記載のコンピュータプログラム製品。
【請求項20】
画像センサによってとられる測定から画像を再構築するための方法であって、
オーバーサンプリングされた光強度値を得るために、光強度場を、レンズを使ってフィルタリングし、画像センサを使ってアップサンプリングするステップと、
最尤推定を使用して、前記再構築された画像を生成するために、前記オーバーサンプリングされた光強度値を処理するステップと
を含む、方法。
【請求項21】
前記処理は、凸最適化問題を解くための高速アルゴリズムを使用するために、前記画像センサの閾値が1に正規化される場合、前記最尤推定の負の対数尤度関数の凸性を活用する、請求項20に記載の方法。
【請求項22】
前記画像センサが、2値画像を生成する2値画像センサである、請求項20に記載の方法。
【請求項23】
2進測定から画像を再構築するためのシステムであって、
オーバーサンプリングされた光強度値を得るために、サンプリングされた光強度係数値を、アップサンプリング係数を使ってアップサンプリングするための、第1のローパスフィルタおよびアップサンプリング画像センサと、
最尤推定を使用して、前記再構築された画像を生成するために、前記オーバーサンプリングされた光強度値を処理するための回路と
を含む、システム。
【図1a】

【図1b】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】
【図14】
【図1b】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公表番号】特表2013−517728(P2013−517728A)
【公表日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−549350(P2012−549350)
【出願日】平成23年1月19日(2011.1.19)
【国際出願番号】PCT/EP2011/050710
【国際公開番号】WO2011/089165
【国際公開日】平成23年7月28日(2011.7.28)
【出願人】(501055961)ラムバス・インコーポレーテッド (89)
【Fターム(参考)】
【公表日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年1月19日(2011.1.19)
【国際出願番号】PCT/EP2011/050710
【国際公開番号】WO2011/089165
【国際公開日】平成23年7月28日(2011.7.28)
【出願人】(501055961)ラムバス・インコーポレーテッド (89)
【Fターム(参考)】
[ Back to top ]