
画像センサ搭載型航空機用航法計算プログラム

【課題】画像センサによる撮影目標の撮影を行う航空機の飛行プランを迅速かつ軽易に提供する画像センサ搭載型航空機用航法計算プログラムを得る。
【解決手段】撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムで、航空機の機種、撮影目標、撮影目標の位置、撮影目標を撮影する航空機の位置及び進行方向を入力し(ステップ3〜6)、画像センサの種別を選定すれば、画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求め(ステップ7)、航空機の最適撮影高度を算出し(ステップ9)、旋回バンク角から算出した旋回半径を用いて航空機の飛行経路の策定を行って(ステップ14)、飛行経路についての航法計算(ステップ18)を行うようにした。
【解決手段】撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムで、航空機の機種、撮影目標、撮影目標の位置、撮影目標を撮影する航空機の位置及び進行方向を入力し(ステップ3〜6)、画像センサの種別を選定すれば、画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求め(ステップ7)、航空機の最適撮影高度を算出し(ステップ9)、旋回バンク角から算出した旋回半径を用いて航空機の飛行経路の策定を行って(ステップ14)、飛行経路についての航法計算(ステップ18)を行うようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、EO/IR(Electro−Optics and Infrared)センサ等に代表される画像センサを搭載した航空機において、撮影諸元の最適化並びに航法計算を自動的に実行することにより、航法計画の策定支援を行う画像センサ搭載型航空機用航法計算プログラムに関するものである。
【背景技術】
【0002】
写真測量や写真偵察等を目的とする航空写真撮影を実施する場合には、撮影対象地域について、その対象地域や目標が、所要の範囲または撮影分解能を満足すべく、実際の飛行に先立ち、飛行ルートを策定することが一般的である。
また、飛行ルートの策定においては、撮影を実施する飛行機固有の速度、燃料搭載量、気象条件、さらには飛行安全確保の観点から帰還飛行場における所要の残燃料量を満足すべく十分注意の上、検討する必要がある。
【0003】
【特許文献1】特開2001−141452号公報(第2〜5頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、撮影目標を十分な画質で撮影するための所要分解能は、一般に目標の規模等により異なり、これらを勘案して飛行経路を策定する場合には、飛行機特有の飛行姿勢(ピッチ角、バンク角等)を考慮する必要がある。この飛行姿勢を無視して撮影範囲/撮影分解能を求めて飛行ルートを策定しても、得られる画像は、全く無駄となる可能性がある。
また同時に、飛行機に搭載可能な燃料には限りがあることから、撮影条件と天候により大きく左右される飛行機の飛行可能距離等を兼ね備えた飛行プランを作成する必要があり、これは非常に熟練を要する作業であり、また時間を要するものであった。
【0005】
この発明は、上述のような従来の課題を解決するためになされたものであり、画像センサによる撮影目標の撮影を行う航空機の飛行プランを迅速かつ軽易に提供する画像センサ搭載型航空機用航法計算プログラムを得ることを目的にしている。
【課題を解決するための手段】
【0006】
この発明に係わる画像センサ搭載型航空機用航法計算プログラムにおいては、撮影対象となる撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムにおいて、
航空機の機種を入力する第一のステップ、
撮影目標を入力する第二のステップ、
撮影目標の位置を入力する第三のステップ、
撮影目標を撮影する航空機の位置及び進行方向を入力する第四のステップ、
撮影目標の撮影に用いる画像センサの種別を選択することにより、この選択された画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求める第五のステップ、
撮影目標を撮影する航空機の最適撮影高度を算出する第六のステップ、
航空機の旋回バンク角を入力し、航空機の飛行経路の策定に用いる旋回半径を算出する第七のステップ、
航空機の通過点を入力し、第七のステップにより算出された旋回半径を用いて、航空機の飛行経路の策定を行う第八のステップ、
及びこの第八のステップにより策定された航空機の飛行経路について、航法計算を行う第九のステップを含むものである。
【発明の効果】
【0007】
この発明は、以上説明したように、撮影対象となる撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムにおいて、
航空機の機種を入力する第一のステップ、
撮影目標を入力する第二のステップ、
撮影目標の位置を入力する第三のステップ、
撮影目標を撮影する航空機の位置及び進行方向を入力する第四のステップ、
撮影目標の撮影に用いる画像センサの種別を選択することにより、この選択された画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求める第五のステップ、
撮影目標を撮影する航空機の最適撮影高度を算出する第六のステップ、
航空機の旋回バンク角を入力し、航空機の飛行経路の策定に用いる旋回半径を算出する第七のステップ、
航空機の通過点を入力し、第七のステップにより算出された旋回半径を用いて、航空機の飛行経路の策定を行う第八のステップ、
及びこの第八のステップにより策定された航空機の飛行経路について、航法計算を行う第九のステップを含むので、航空機の画像センサによる撮影目標の撮影に当たって、航空機の飛行計画の立案を容易かつ短時間に行うことができる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
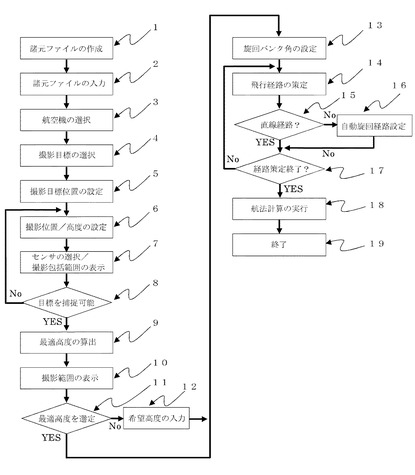
図1は、この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの処理手順を示すフローチャートである。
【0009】
以下、実施の形態1について、図1の流れに沿って順次、詳細に説明する。
図1のステップ1(第十のステップ)で、飛行計画作成に伴うパラメータ入力の煩雑さを低減するため、各種諸元値を事前にファイル化する。次いで、ステップ2で、プログラムに入力する。
【0010】
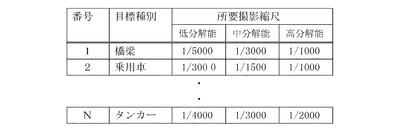
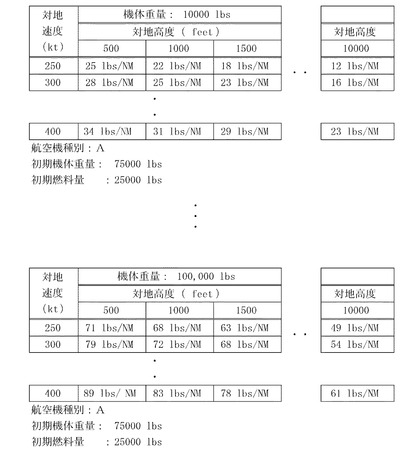
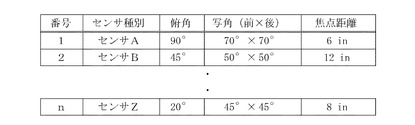
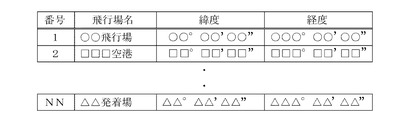
図2は、撮影目標に対応する所要分解能を示す諸元ファイル(所要分解能ファイル)を示す図であり、図3は、航空機の各速度及び高度に対応する燃料消費量を示す諸元ファイル(機体諸元アフィル)を示す図であり、図4は、航空機に搭載する画像センサ毎の諸元を示す諸元ファイル(センサ諸元ファイル)を示す図であり、図5は、飛行場及び航法援助施設の位置を示す諸元ファイル(飛行場/航法援助施設位置諸元ファイル)を示す図である。
図2、図3、図4、図5は、本プログラムへの入力可能な諸元ファイルを示しており、いずれの諸元ファイルも、テーブル構造を有している。プログラムのユーザは、これらの諸元ファイルの編集をプログラムの運用前に実施し、コンピュータに入力する。
【0011】
ここで、図2、図3、図4、図5に示す諸元テーブルにおける行の要素の増加/削除に、本発明によるプログラムは対応しており、ユーザの独自のデータ構成に対応する。
また、各カラム内の諸元値について、同様にユーザ独自の編集に対応するものとしている。
ここで、図3に示す機体諸元ファイルは、本発明によるプログラムにおいて対応を想定する航空機種別数に応じて、各機種毎に保有する。
【0012】
図1のステップ3(第一のステップ)において、空中写真の撮影を行う航空機の機種を選択する。本ステップ3以下のステップでは、選択された機種に対応した機体諸元ファイル(図3)に記載の諸元値が次以降の各ステップにて用いられる。
【0013】
図1のステップ4(第二のステップ)において、撮影目標の選択を行う。本ステップ4では、図2に示す所要分解能ファイルに記載の目標種別から選択可能であり、後述するステップ9では、選択された目標に対応した所要撮影縮尺を用いて最適撮影高度の算出が行われる。
【0014】
続いて、図1のステップ5(第三のステップ)では、ステップ4にて選択した撮影目標の存在位置を、マウス等の外部入力機器を用いることでプログラムに入力する。
さらに、次のステップ6(第四のステップ)にて、撮影を行う機体の想定位置並びに想定する撮影高度、進行方向を、外部入力機器を用いて入力する。
【0015】
ステップ7(第五のステップ)では、まず、撮影に用いるセンサの種別を選択する。ここで、選択可能なセンサの種別は、ステップ1にて作成した、図4のセンサ諸元ファイルに記載したものから選択することができる。
センサ選択の後、撮影時に想定する航空機の姿勢(機体姿勢)を入力することで、航空機からセンサを用いて撮影を実施した場合の、画像に包括される地表面の範囲(撮影包括範囲)を求めることができる。以下にその手順を示す。
【0016】
ステップ7における撮影包括範囲の算出に用いるパラメータは、以下の(A1)(A2)のとおりである。
(A1)航空機に関するパラメータ
このパラメータには、航空機位置と、飛行高度と、進行方向と、バンク角がある。
航空機位置y、xは、航空機直下の地点に該当する緯度(y)、経度(x)座標である。
飛行高度H(ft)は、飛行機の飛行高度(対地高度)であり、単位はftである。
進行方向θ(°)は、真北を0度とする進行方向の方位である。
バンク角φ(°)は、水平飛行状態を0度とする機体のバンク角度である。
【0017】
(A2)センサに関するパラメータ
このパラメータには、俯角と写角がある。
俯角δ(°)は、機体に対するセンサの指向方向を示す。機種方向(水平方向)を0度とする。
写角α(°)×β(°)は、センサのレンズの写角(開口角)を示す。機体方向と機体に対して直交する方向(翼方向)双方で規定する。
【0018】
撮影包括範囲を算出する際の計算法は、以下の(B1)〜(B7)の各ステップにより行うものとする。
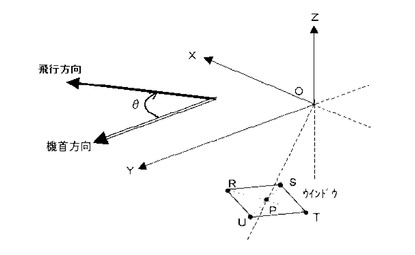
(B1)座標系の設定と仮想センサウインドウ
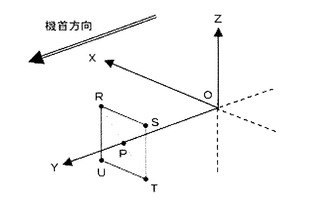
撮影包括範囲を求める上で、図6に示すように座標系を設定する。ここで、X軸は機体原点Oから見て右方向(右翼方向)を示す。また、Y軸は機種方向、Z軸は機体上方を示すものとする。ここで、撮影包括範囲の算出が簡易となるよう、センサの写角により張られる仮想的なウインドウ(センサウインドウ)を想定し、センサウインドウを構成する4点をそれぞれR点、S点、T点、U点と定義する。
また、上記センサウインドウの中点をP点と定義し、OP間距離を1とする。ここで、中点Pは、センサによる撮影画像の中央を示す点と同義である。以上より、点P、R、S、T、Uの座標位置(x,y,z)は以下のとおりである。
点P:(0,1,0)
点R:(tan(β/2),1,tan(α/2))
点S:(−tan(β/2),1,tan(α/2))
点T:(−tan(β/2),1,−tan(α/2))
点U:(tan(β/2),1,−tan(α/2))
【0019】
(B2)俯角によるセンサウインドウの回転と点P,R、S、T、Uの座標位置算出
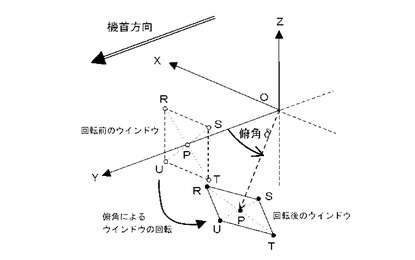
次に、センサ固有の俯角δによるセンサウインドウの回転処理を行う。図7にセンサウインドウの回転処理の様子を示す。センサの俯角は、機種方向(Y軸)からの角度として定義しているので、俯角δによる回転処理は、X軸を回転軸とした3次元空間における一次変換処理と同等である。
これを踏まえ、俯角回転処理後の点P、R、S、T、Uの座標位置(x’,y’,z’)は回転前の座標(x,y,z)を用いて、式(1)により求められる。
【0020】
【数1】

【0021】
ここで、俯角による回転処理は、X軸を回転軸とした一次変換処理であるので、回転後のX座標値は回転前と同じものになる。
【0022】
(B3)バンク角によるセンサウインドウの回転と点P,R、S、T、Uの座標位置算出
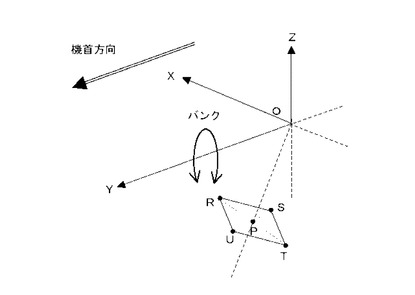
次に、機体の飛行姿勢であるバンク角φによるセンサウインドウの回転処理を行う。図8にセンサウインドウの回転処理の様子を示す。バンク角は、機体の左右方向の傾き(Y軸回転)として定義しているので、バンク角φによる回転処理は、Y軸を回転軸とした3次元空間における一次変換処理と同等である。
これを踏まえ、俯角回転処理後の点P、R、S、T、Uの座標位置(x’’,y’’,z’’)は、バンク回転前の座標(x’,y’,z’)を用いて式(2)により求められる。
【0023】
【数2】
【0024】
ここで、バンク角による回転処理は、Y軸を回転軸とした3次元一次変換処理であるので、回転後のY座標値は回転前と同じものになる。
【0025】
(B4)飛行方位へのセンサウインドウの回転と点P、R、S、T、Uの座標位置算出
次に、機体の飛行方位である方位角θによるセンサウインドウの回転処理を行う。図9にセンサウインドウの回転処理の様子を示す。飛行方位角は、真北方向を基準とした飛行方位として定義しているので、方位角θによる回転処理はZ軸を回転軸とした3次元空間における一次変換処理と同等である。
これを踏まえ、俯角回転処理後の点P、R、S、T、Uの座標位置(x’’’,y’’’,z’’’)は、飛行方位への回転処理前の座標(x’’,y’’,z’’)を用いて、式(3)により求められる。
【0026】
【数3】
【0027】
ここで、飛行方位角による回転処理は、Z軸を回転軸とした3次元一次変換処理であるので、回転後のZ座標値は、回転前と同じものになる。
【0028】
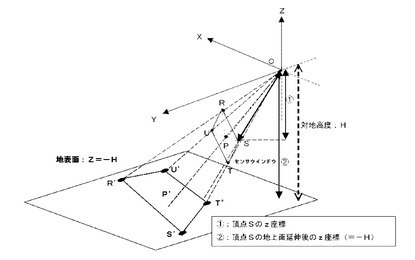
(B5)点P、R、S、T、U座標の地表面への射影
地上面における撮影包括範囲は、(B1)から(B4)までの一次変換を実施した後の点P、R、S、T、Uを、図10に示すように、地上面へ射影したものとなる。航空機の対地高度はHであるので、原点Oから見た地表面のZ座標値は、−Hに相当する面となる。このことから、センサウインドウ上の点P、R、S、T、Uの地表面への射影点P’、R’、S’、T’、U’は、このZ=−Hに相当する地表面への、ベクトルOP、OR、OS、OT、OUを地表面へ延伸することで得ることができる。
上記ベクトルの延伸率は、各点P、R、S、T、UのZ座標値と地表相当面Z=−Hとの比となることから、地表相当面Z=−H上の各点P’、R’、S’、T’、U’の座標(P’x,P’y,P’z)、(R’x,R’y,R’z)、(S’x,S’y,S’z)、(T’x,T’y,T’z)、(U’x,U’y,U’z)は、以下のとおりとなる。
【0029】
点P’の座標値
P’x:−H/z’’’P*x’’’P
P’y:−H/z’’’P*y’’’P
P’z:−H
点R’の座標値
R’x:−H/z’’’R*x’’’R
R’y:−H/z’’’R*y’’’R
Rz:−H
点S’の座標値
S’x:−H/z’’’S*x’’’S
S’y:−H/z’’’S*y’’’S
S’z:−H
点T’の座標値
T’x:−H/z’’’T*x’’’T
T’y:−H/z’’’T*y’’’T
T’z:−H
点U’の座標値
U’x:−H/z’’’U*x’’’U
U’y:−H/z’’’U*y’’’U
U’z:−H
【0030】
ここで、(x’’’P, y’’’P, z’’’P), (x’’’R, y’’’R, z’’’R), (x’’’S, y’’’S, z’’’S), (x’’’T, y’’’T, z’’’T), (x’’’U, y’’’U, z’’’U)は、飛行方位角への回転を実施した後の点P、R、S、T、Uの座標値である。
【0031】
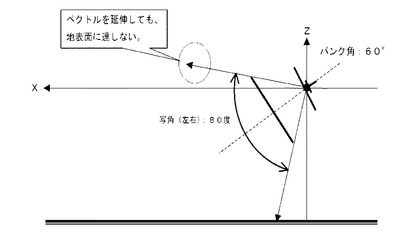
(B6)−H/z’’’P、−H/z’’’R、−H/z’’’S、−H/z’’’T、−H/z’’’Uが負となる場合の例外処理
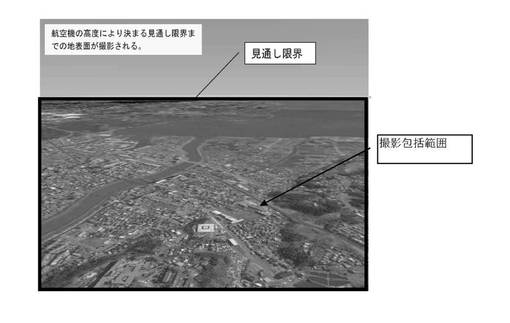
図11に示すように、航空機のバンク角と、センサの左右方向の写角の関係により、−H/z’’’P、−H/z’’’R、−H/z’’’S、−H/z’’’T、−H/z’’’Uのいずれかが負となる場合がある。この場合、撮影包括範囲が正常に描画されないことになる。これは、センサの撮影範囲(視野)が地上面以外に空中を含むことになるからであり、撮影包括範囲の描画の際には例外処理を実施する必要がある。
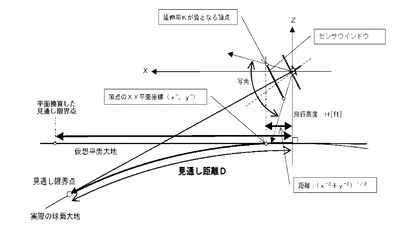
この場合の実際の撮影包括範囲は、図12に示すように、航空機の高度により定まる工学的な見通し限界線により制約を受ける。この場合の例外処理方法は、以下(C1)〜(C3)のとおりとする。また、本処理の概要を図13に示す。
【0032】
(C1)飛行方向への回転処理を終えた段階で、−H/z’’’が負となる頂点について、地表相当面へ射影した位置と、航空機直下の地表相当面位置(0,0,0)との距離dを算出する。dは式(4)により算出できる。
【0033】
【数4】
【0034】
ここで、x’’’、y’’’は、−H/z’’’が負となる点のX座標とY座標の値である。
【0035】
(C2)航空機からの見通し限界距離Dを算出する。ここで、Dは式(5)にて算出する。ただし、式(5)におけるHは、航空機の対地高度である。
【0036】
【数5】
【0037】
(C3)見通し限界点の座標は、(C2)で算出した見通し距離分だけ頂点座標を延伸することで求めることができる。ただし、Z座標値は延伸しない。延伸後の座標は、以下のとおりである。
X座標=x’’’×(D/d)
Y座標=y’’’×(D/d)
Z座標=−H
【0038】
(B7)地表面への射影点R’、S’、T’、U’の描画
最終的な算出結果である(B5)にて得られた点R’、S’、T’、U’のX−Y座標値を元にコンピュータの画面上に描画することで、航空機搭載のセンサによる撮影包括範囲を表示することができる。
【0039】
ステップ8で、このとき、撮影包括範囲内に撮影目標が存在しない場合は、ステップ6に戻り、再度撮影位置を設定し、撮影目標が撮影範囲内に存在するよう、調整する。また、撮影包括範囲に撮影目標が存在する場合は、撮影目標を捕捉可能であることから、図1におけるステップ9に進む。
【0040】
ステップ9(第六のステップ)における最適撮影高度算出に必要なパラメータは、以下の(D1)(D2)のとおりである。
(D1)撮影中央点に関するパラメータ
撮影中央点は、点P’の位置となり、撮影縮尺は、点P’における縮尺として定義する。
このとき、点P’の座標は、
P’x:−H/z’’’P*x’’’P
P’y:−H/z’’’P*y’’’P
P’z:−H
である。
【0041】
(D2)撮影目標の種別と所要の分解能の選択
コンピュータにおいて、撮影目標の種別と、撮影時に必要な分解能を選択する。詳細は以下のとおりである。
目標種別は、撮影目標種別から選択する。(注)所要分解能ファイルに記載された目標種別から選択可能。
所要分解能は、「低分解能」、「中分解能」、「高分解能」から選択する。
焦点距離は、選択された撮影センサに対応する焦点距離である。(注)センサ諸元ファイルに記載の当該センサに対応する焦点距離。
所要分解能を選択することで、所要分解能ファイルに記載された、当該目標の所要分解能に対応する所要撮影縮尺が読み込まれ、最適撮影高度を算出することができる。
【0042】
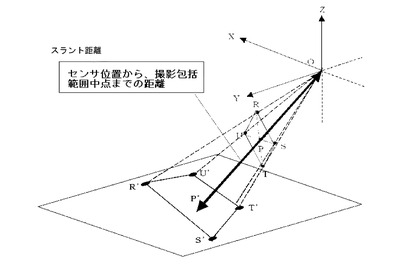
最適撮影高度の算出は、以下の(E1)(E2)の手順による。
(E1)航空機位置(点O)と撮影包括範囲中点(点P’)間距離(スラント距離)の算出
図14に示されるスラント距離は、式(6)により求めることができる。
【0043】
【数6】
【0044】
(E2)最適撮影高度の算出
撮影縮尺とスラント距離は、以下の関係がある。
撮影縮尺=センサ焦点距離/スラント距離
この式と、(E1)にて算出したスラント距離の関係から、最適撮影高度は、式(7)により算出することができる。
【0045】
【数7】
【0046】
ステップ9にて、最適撮影高度を算出したら、ステップ10で、撮影包括範囲の表示が行われ、また、その算出高度を飛行高度とする場合には、ステップ11で、飛行高度として最適撮影高度を入力する。このとき、ステップ6にて入力した飛行高度と最適撮影高度が異なる場合には、最適撮影高度に対応する撮影包括範囲が自動的に表示される。また、最適撮影高度を飛行高度としない場合には、ステップ12にて任意の飛行高度を入力することができる。
ここでも入力した高度が、ステップ6にて入力した高度と異なる場合には、ステップ12にて入力した高度に対応する撮影包括範囲が自動的に表示される。
【0047】
ステップ13(第七のステップ)では、飛行経路上を飛行する際の、旋回バンク角を入力し、飛行経路の選定に用いる旋回半径を算出する。ここで、旋回バンク角の入力範囲は、以下のとおりである。
−90°(注:右旋回)<旋回バンク角 θ<+90°(注:左旋回)
ここで、旋回半径は、以下の式から算出する。ただし、式中のgは重力加速度を示す。
旋回半径=航空機の対地速度/g×tanθ
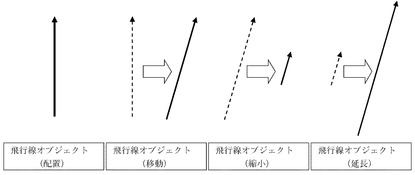
【0048】
ステップ14(第八のステップ)では、飛行経路の策定を行う。ステップ14では、図15に示すように、コンピュータ上に飛行線オブジェジェクトを表示し、マウス等の外部入力インターフェースにより、直接、飛行線オブジェクトを配置/移動/縮小/延長することで、経路の策定を実施できる。
【0049】
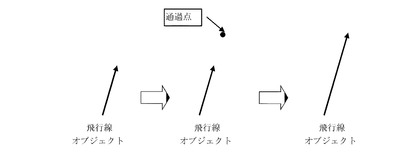
ステップ14により策定した飛行線の後続通過点として、マウス等の外部入力インターフェースにより通過点を設定でき、ステップ15に進む。この通過点は、上記インターフェースにて任意点を指定できる他、図5に示す位置諸元ファイルに記載の各飛行場、航法援助施設一覧からも指定できるものとする。
【0050】
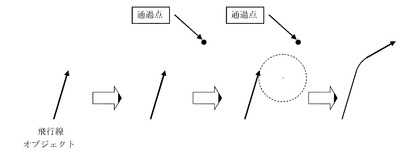
ステップ15では、ステップ14にて設定した通過点が、ステップ14にて策定した飛行線オブジェクトの延長線上に存在する場合と、しない場合とで処理を区分し、個別に経路を自動的に策定する。図16に示すように、通過点がステップ14にて策定した飛行線オブジェクトの延長線上に存在する場合には、当該飛行線オブジェクトを通過点まで延長する。
一方、図17に示すように、通過点がステップ14にて策定した飛行線オブジェクトの延長線上に存在しない場合は、ステップ16で、旋回経路による経路選定を自動的に実施する。なお、旋回経路の策定に用いられる旋回半径は、ステップ13にて算出された値を用いる。
【0051】
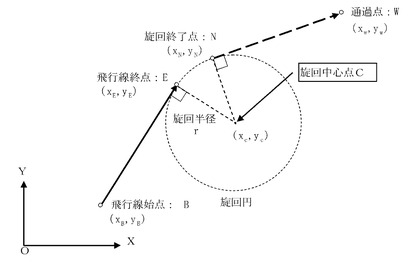
ステップ16における旋回経路の自動策定に用いるパラメータは、旋回半径と、旋回方向と、飛行線開始点と、飛行線終了点と、通過点座標である。ここで、
旋回半径rは、ステップ13にて算出した値である。
旋回方向 右/左は、飛行線から通過点に至る旋回経路上の旋回方向で、「右」、「左」から選択入力する。
飛行線開始点:B(xB,yB)は、旋回経路と接続するステップ14にて選定した飛行線の始点座標である。
飛行線終了点:E(xE,yE)は、旋回経路と接続する、ステップ14にて選定した飛行線の終点座標である。
通過点座標:W(xw,yw)は、ステップ15にて設定した通過点の座標値である。
【0052】
ステップ16における旋回経路の自動策定の手順は、以下の(F1)〜(F3)のとおりである。
ここで、飛行線方位が真北方向または東西方向にある場合は、その手順は非常に簡易であるので、以下では、飛行線方位が上記以外の向きにある場合を想定し、旋回方向として右旋回するものとして説明する。
【0053】
(F1)旋回中心点の算出
図18に示すように、旋回中心点は、飛行線終点を通る半径rの円として定義される。ここで飛行線の傾きは、式(8)により算出される。
【0054】
【数8】
【0055】
ただし、ここでは xE−xB≠0 である。EC→と飛行線は直交し、その長さは旋回半径rと等しいことから、EC→は式(9)のとおり表現される。
【0056】
【数9】
【0057】
ここで、旋回中心点Cの位置ベクトルは、飛行線終点位置ベクトルとの和として表現されることから、式(10)により算出される。
【0058】
【数10】
【0059】
以上の結果から、旋回中心点Cの座標は、式(11)のとおり表現される。
【0060】
【数11】
【0061】
(F2)旋回終了点の算出
図18に示すとおり、旋回終了点Nは、旋回経路上に存在し、通過点Wと直線にて接続される点であり、文字とおり旋回運動の終了点である。点Nは、式(12)による条件を満足する点である。
【0062】
【数12】
【0063】
式(12)の2個の式を解くことで、点Nの座標点を算出することができる。
【0064】
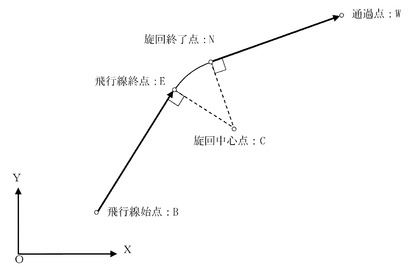
(F3)旋回経路の策定と描画
ステップ16にて、旋回中心点C、旋回終了点Nを算出することで、点Eを始点、点Nを終点とする半径rの円弧と、点Nと通過点Wを直線で結び、これを図19に示すように描画することにより、旋回経路の自動選定が可能となる。
【0065】
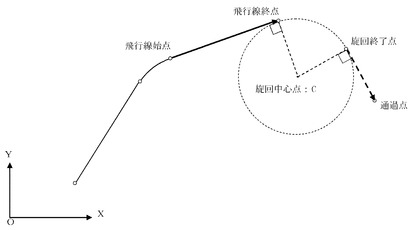
ステップ17で、旋回経路の自動策定後、飛行経路の策定を継続する場合は、ステップ14における飛行経路の策定を継続的に実施し、図20に示すように、通過点を任意に設定して旋回経路の自動策定を続けることで、任意の飛行経路長の飛行計画を作成することができる。
ここで、本プログラムにおける飛行経路選定時の始点は、出発飛行場位置、終点は、帰投飛行場位置を前提とする。
また、機体諸元ファイルに記載の燃料消費量は、一般に飛行速度別に異なる値をとるが、以下では、すべてこの飛行速度は、機体諸元ファイルにて対地速度を元に記載されているものとして説明を行う。
【0066】
ステップ17で、飛行経路の策定を終了した後は、ステップ18(第九のステップ)に示す航法計算を行う。ここでの手順は、以下の(G1)〜(G4)のとおりである。
(G1)総飛行経路長の算出
本プログラムにおいて策定した飛行線の飛行線長及び本発明に係るプログラムにおいて自動策定された旋回経路長を総和することで、総飛行経路を算出することができる。したがって、総飛行経路長は、以下の式にて算出される。
総飛行経路長=Σ飛行線長+Σ旋回経路における円弧長
【0067】
(G2)総飛行時間の算出
総飛行時間は、総飛行経路長を飛行速度(対地速度)にて除算することで可能となるため、式(13)にて算出することができる。
【0068】
【数13】
【0069】
(G3)燃料消費量の算出
航空機の燃料消費量を、ステップ14にて策定した飛行線及びステップ16にて自動選定した旋回経路における円弧状の経路毎に算出し、その総和をとることで、総飛行経路における燃料消費量を算出することが可能となる。
図3に示す機体諸元ファイルでは、機体重量、飛行高度、速度毎に、飛行距離1NMあたりの燃料消費量が記載されているので、各飛行線長に対応する燃料消費量を積算することで、総燃料消費量を算出することができる。
ここで、燃料を消費するに従い、機体重量は減少することを勘案し、各飛行線及び旋回経路における円弧の始点における機体重量の減算処理を行う。これは、当該飛行線に至るまでの飛行経路における燃料消費量を算出し、算出した燃料消費量を機体重量から減算することで可能となる。したがって、算出式は、式(14)のとおりである。
【0070】
【数14】
【0071】
ここで、飛行線及び円弧の始点における機体重量は以下の式にて算出される。
【0072】
飛行線及び円弧の始点における機体重量
=(初期機体重量+初期燃料量)−当該飛行線・円弧に至るまでの燃料消費量
【0073】
(G4)残燃料量の算出
飛行経路の終点における残燃料量は、以下の式から算出できる。
残燃料量=初期燃料量−燃料消費量
【0074】
ステップ18における航法計算を終了することにより、本発明におけるプログラムは、ステップ19の正常終了することになる。
【0075】
実施の形態1によれば、航法計算に必要なデータをテーブル形式の電子データでコンピュータで保有した上で、策定された飛行経路に対応する各種航法計算を自動的に実行可能であり、同様にテーブル形式にて保有する航空機搭載センサ諸元と撮影対象の所要分解能から容易に所要分解能に合致する最適な飛行高度を自動算出できることから、航空写真の撮影をその目的とする飛行計画の立案を容易かつ短時間に対応することができる。
また、航法計算に必要な各種諸元は、個々にテーブル形式の電子データでコンピュータ内に保有させ、使用者の意思により、その編集/追加/修正/削除を容易に行え、例えばセンサや航法援助施設に係る各種諸元の追加、削除、変更が容易になっている。
【0076】
また、飛行経路の策定において、マウス等の外部入力インターフェースを用いてコンピュータ画面上に各種オブジェクト(飛行線、通過点)を配置することにより、その経路選定を容易とすることを特徴としており、入力された旋回バンク角と設定した航空機の速度に対応する旋回半径を自動的に算出し、旋回経路を自動描画することで、より簡易に経路選定を実現することができる。
【0077】
さらに、策定された飛行経路について、選択した航空機の種別、気象条件、飛行速度、飛行高度に対応し、その航法計算を自動的に実施し、飛行に必要な燃料量、設定した帰投飛行場上空における残燃料量、飛行距離、総飛行時間、経路上に設定した通過点における通過時間を算出でき、また、経路や高度、速度を再設定した場合においても自動的に再設定後の飛行経路、高度、速度に応じて航法計算を自動的に実施できる。
【0078】
実施の形態2.
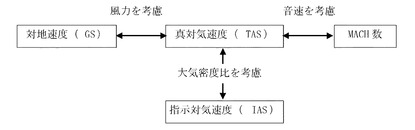
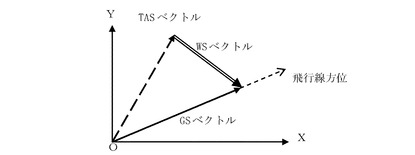
航空機の速度は、一般に対地速度(GS)以外にも、対地速度(GS)に対して風力を考慮した真対気速度(TAS)、真対気速度(TAS)に対して大気密度比を考慮した指示対気速度(IAS)、真対気速度(TAS)に対して音速を考慮したMACH数等、多種存在し、図21に示すように、相互に密接な関係を有する。
このことから、実施の形態2によるプログラムでは、速度の相互変換に対応し、気象条件を踏まえた飛行計画の作成を可能とする。このため、以下の機能を有する。
【0079】
真対気速度(TAS)と指示対気速度(IAS)は、当該飛行高度における温度による大気密度により関連付けられることから、本プログラムでは、式(15)の換算式を用いて、入力された飛行速度の相互変換を行うものとする。
【0080】
【数15】
【0081】
ここで、HAは航空機の大気高度、t0は地表面温度(°C)を示す。
【0082】
対地速度(GS)と真対気速度(TAS)は、図22に示す風力三角形の関係を用いて、式(16)により相互変換可能である。
【0083】
【数16】
【0084】
ここで、GSは対地速度ベクトルの大きさ、WSは風力ベクトルの大きさ(風速)、θGは対地速度ベクトルの向き(真北基準)、θWは同様に風の真北を基準とする到来方向である。
【0085】
MACHは、航空機が飛行する高度(大気高度)における音速を基に定義される速度であり、以下の式にて定められる。
MACH=TAS(真対気速度 単位:kt)/Vs
【0086】
ここで、Vsは航空機の飛行高度における音速であり、以下の式から算出できる。
Vs=20.04×{(t0−0.00198×HA)+273}1/2×3600/1852 (kt)
上式において、HAは航空機の大気高度、t0は地表面温度(°C)を示す。
【0087】
実施の形態2によれば、航空機の速度の相互変換に対応し、気象条件を踏まえた飛行計画の作成を可能とする。
【図面の簡単な説明】
【0088】
【図1】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの処理手順を示すフローチャートである。
【図2】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの撮影目標に対応する所要分解能を示す諸元ファイル(所要分解能ファイル)を示す図である。
【図3】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機の各速度及び高度に対応する燃料消費量を示す諸元ファイル(機体諸元アフィル)を示す図である。
【図4】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機に搭載する画像センサ毎の諸元を示す諸元ファイル(センサ諸元ファイル)を示す図である。
【図5】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行場及び航法援助施設の位置を示す諸元ファイル(飛行場/航法援助施設位置諸元ファイル)を示す図である。
【図6】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの撮影包括範囲算出に伴う座標系設定とセンサウインドウを示す図である。
【図7】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのセンサ俯角を考慮したセンサウインドウの回転処理を示す図である。
【図8】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機のバンク角を考慮したセンサウインドウの回転処理を示す図である。
【図9】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機の進行方向への向きを考慮したセンサウインドウの回転処理を示す図である。
【図10】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの回転処理終了後のセンサウインドウの地上相当面への延伸処理を示す図である。
【図11】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのバンク角による撮影包括範囲の算出異常例を示す図である。
【図12】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのバンク角による実際の撮影包括範囲の一例を示す図である。
【図13】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのバンク角による撮影包括範囲の見通し距離付加処理を示す図である。
【図14】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの撮影包括範囲とスラント距離の関係を示す図である。
【図15】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行線オブジェクトの配置/移動/縮小/延長を示す図である。
【図16】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行線に対する通過点設定(飛行線の延長線上に通過点設定した場合)を示す図である。
【図17】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行線に対する通過点設定(飛行線の延長線上以外に通過点設定した場合)を示す図である。
【図18】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの旋回経路の自動策定の原理を示す図である。
【図19】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの旋回経路の自動選定による旋回経路の描画結果を示す図である。
【図20】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行経路の策定要領を示す図である。
【図21】この発明の実施の形態2による画像センサ搭載型航空機用航法計算プログラムの対地速度、真対気速度、指示対気速度、MACHの相互関係を示す図である。
【図22】この発明の実施の形態2による画像センサ搭載型航空機用航法計算プログラムの風力三角形の一例を示す図である。
【符号の説明】
【0089】
1 諸元ファイルの作成ステップ
2 諸元ファイルの入力ステップ
3 航空機の選択ステップ
4 撮影目標の選択ステップ
5 撮影目標位置の設定ステップ
6 撮影位置/高度の設定ステップ
7 センサの選択/撮影包括範囲の表示ステップ
8 目標を捕捉可能/不可能の判定ステップ
9 最適高度の算出ステップ
10 撮影包括範囲の表示ステップ
11 最適高度の選定判定ステップ
12 希望高度の入力ステップ
13 旋回バンク角の設定ステップ
14 飛行経路の策定ステップ
15 経路の直線/旋回判定ステップ
16 自動旋回経路策定ステップ
17 経路選定終了判定ステップ
18 航法計算実行ステップ
19 終了
【技術分野】
【0001】
この発明は、EO/IR(Electro−Optics and Infrared)センサ等に代表される画像センサを搭載した航空機において、撮影諸元の最適化並びに航法計算を自動的に実行することにより、航法計画の策定支援を行う画像センサ搭載型航空機用航法計算プログラムに関するものである。
【背景技術】
【0002】
写真測量や写真偵察等を目的とする航空写真撮影を実施する場合には、撮影対象地域について、その対象地域や目標が、所要の範囲または撮影分解能を満足すべく、実際の飛行に先立ち、飛行ルートを策定することが一般的である。
また、飛行ルートの策定においては、撮影を実施する飛行機固有の速度、燃料搭載量、気象条件、さらには飛行安全確保の観点から帰還飛行場における所要の残燃料量を満足すべく十分注意の上、検討する必要がある。
【0003】
【特許文献1】特開2001−141452号公報(第2〜5頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、撮影目標を十分な画質で撮影するための所要分解能は、一般に目標の規模等により異なり、これらを勘案して飛行経路を策定する場合には、飛行機特有の飛行姿勢(ピッチ角、バンク角等)を考慮する必要がある。この飛行姿勢を無視して撮影範囲/撮影分解能を求めて飛行ルートを策定しても、得られる画像は、全く無駄となる可能性がある。
また同時に、飛行機に搭載可能な燃料には限りがあることから、撮影条件と天候により大きく左右される飛行機の飛行可能距離等を兼ね備えた飛行プランを作成する必要があり、これは非常に熟練を要する作業であり、また時間を要するものであった。
【0005】
この発明は、上述のような従来の課題を解決するためになされたものであり、画像センサによる撮影目標の撮影を行う航空機の飛行プランを迅速かつ軽易に提供する画像センサ搭載型航空機用航法計算プログラムを得ることを目的にしている。
【課題を解決するための手段】
【0006】
この発明に係わる画像センサ搭載型航空機用航法計算プログラムにおいては、撮影対象となる撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムにおいて、
航空機の機種を入力する第一のステップ、
撮影目標を入力する第二のステップ、
撮影目標の位置を入力する第三のステップ、
撮影目標を撮影する航空機の位置及び進行方向を入力する第四のステップ、
撮影目標の撮影に用いる画像センサの種別を選択することにより、この選択された画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求める第五のステップ、
撮影目標を撮影する航空機の最適撮影高度を算出する第六のステップ、
航空機の旋回バンク角を入力し、航空機の飛行経路の策定に用いる旋回半径を算出する第七のステップ、
航空機の通過点を入力し、第七のステップにより算出された旋回半径を用いて、航空機の飛行経路の策定を行う第八のステップ、
及びこの第八のステップにより策定された航空機の飛行経路について、航法計算を行う第九のステップを含むものである。
【発明の効果】
【0007】
この発明は、以上説明したように、撮影対象となる撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムにおいて、
航空機の機種を入力する第一のステップ、
撮影目標を入力する第二のステップ、
撮影目標の位置を入力する第三のステップ、
撮影目標を撮影する航空機の位置及び進行方向を入力する第四のステップ、
撮影目標の撮影に用いる画像センサの種別を選択することにより、この選択された画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求める第五のステップ、
撮影目標を撮影する航空機の最適撮影高度を算出する第六のステップ、
航空機の旋回バンク角を入力し、航空機の飛行経路の策定に用いる旋回半径を算出する第七のステップ、
航空機の通過点を入力し、第七のステップにより算出された旋回半径を用いて、航空機の飛行経路の策定を行う第八のステップ、
及びこの第八のステップにより策定された航空機の飛行経路について、航法計算を行う第九のステップを含むので、航空機の画像センサによる撮影目標の撮影に当たって、航空機の飛行計画の立案を容易かつ短時間に行うことができる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1は、この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの処理手順を示すフローチャートである。
【0009】
以下、実施の形態1について、図1の流れに沿って順次、詳細に説明する。
図1のステップ1(第十のステップ)で、飛行計画作成に伴うパラメータ入力の煩雑さを低減するため、各種諸元値を事前にファイル化する。次いで、ステップ2で、プログラムに入力する。
【0010】
図2は、撮影目標に対応する所要分解能を示す諸元ファイル(所要分解能ファイル)を示す図であり、図3は、航空機の各速度及び高度に対応する燃料消費量を示す諸元ファイル(機体諸元アフィル)を示す図であり、図4は、航空機に搭載する画像センサ毎の諸元を示す諸元ファイル(センサ諸元ファイル)を示す図であり、図5は、飛行場及び航法援助施設の位置を示す諸元ファイル(飛行場/航法援助施設位置諸元ファイル)を示す図である。
図2、図3、図4、図5は、本プログラムへの入力可能な諸元ファイルを示しており、いずれの諸元ファイルも、テーブル構造を有している。プログラムのユーザは、これらの諸元ファイルの編集をプログラムの運用前に実施し、コンピュータに入力する。
【0011】
ここで、図2、図3、図4、図5に示す諸元テーブルにおける行の要素の増加/削除に、本発明によるプログラムは対応しており、ユーザの独自のデータ構成に対応する。
また、各カラム内の諸元値について、同様にユーザ独自の編集に対応するものとしている。
ここで、図3に示す機体諸元ファイルは、本発明によるプログラムにおいて対応を想定する航空機種別数に応じて、各機種毎に保有する。
【0012】
図1のステップ3(第一のステップ)において、空中写真の撮影を行う航空機の機種を選択する。本ステップ3以下のステップでは、選択された機種に対応した機体諸元ファイル(図3)に記載の諸元値が次以降の各ステップにて用いられる。
【0013】
図1のステップ4(第二のステップ)において、撮影目標の選択を行う。本ステップ4では、図2に示す所要分解能ファイルに記載の目標種別から選択可能であり、後述するステップ9では、選択された目標に対応した所要撮影縮尺を用いて最適撮影高度の算出が行われる。
【0014】
続いて、図1のステップ5(第三のステップ)では、ステップ4にて選択した撮影目標の存在位置を、マウス等の外部入力機器を用いることでプログラムに入力する。
さらに、次のステップ6(第四のステップ)にて、撮影を行う機体の想定位置並びに想定する撮影高度、進行方向を、外部入力機器を用いて入力する。
【0015】
ステップ7(第五のステップ)では、まず、撮影に用いるセンサの種別を選択する。ここで、選択可能なセンサの種別は、ステップ1にて作成した、図4のセンサ諸元ファイルに記載したものから選択することができる。
センサ選択の後、撮影時に想定する航空機の姿勢(機体姿勢)を入力することで、航空機からセンサを用いて撮影を実施した場合の、画像に包括される地表面の範囲(撮影包括範囲)を求めることができる。以下にその手順を示す。
【0016】
ステップ7における撮影包括範囲の算出に用いるパラメータは、以下の(A1)(A2)のとおりである。
(A1)航空機に関するパラメータ
このパラメータには、航空機位置と、飛行高度と、進行方向と、バンク角がある。
航空機位置y、xは、航空機直下の地点に該当する緯度(y)、経度(x)座標である。
飛行高度H(ft)は、飛行機の飛行高度(対地高度)であり、単位はftである。
進行方向θ(°)は、真北を0度とする進行方向の方位である。
バンク角φ(°)は、水平飛行状態を0度とする機体のバンク角度である。
【0017】
(A2)センサに関するパラメータ
このパラメータには、俯角と写角がある。
俯角δ(°)は、機体に対するセンサの指向方向を示す。機種方向(水平方向)を0度とする。
写角α(°)×β(°)は、センサのレンズの写角(開口角)を示す。機体方向と機体に対して直交する方向(翼方向)双方で規定する。
【0018】
撮影包括範囲を算出する際の計算法は、以下の(B1)〜(B7)の各ステップにより行うものとする。
(B1)座標系の設定と仮想センサウインドウ
撮影包括範囲を求める上で、図6に示すように座標系を設定する。ここで、X軸は機体原点Oから見て右方向(右翼方向)を示す。また、Y軸は機種方向、Z軸は機体上方を示すものとする。ここで、撮影包括範囲の算出が簡易となるよう、センサの写角により張られる仮想的なウインドウ(センサウインドウ)を想定し、センサウインドウを構成する4点をそれぞれR点、S点、T点、U点と定義する。
また、上記センサウインドウの中点をP点と定義し、OP間距離を1とする。ここで、中点Pは、センサによる撮影画像の中央を示す点と同義である。以上より、点P、R、S、T、Uの座標位置(x,y,z)は以下のとおりである。
点P:(0,1,0)
点R:(tan(β/2),1,tan(α/2))
点S:(−tan(β/2),1,tan(α/2))
点T:(−tan(β/2),1,−tan(α/2))
点U:(tan(β/2),1,−tan(α/2))
【0019】
(B2)俯角によるセンサウインドウの回転と点P,R、S、T、Uの座標位置算出
次に、センサ固有の俯角δによるセンサウインドウの回転処理を行う。図7にセンサウインドウの回転処理の様子を示す。センサの俯角は、機種方向(Y軸)からの角度として定義しているので、俯角δによる回転処理は、X軸を回転軸とした3次元空間における一次変換処理と同等である。
これを踏まえ、俯角回転処理後の点P、R、S、T、Uの座標位置(x’,y’,z’)は回転前の座標(x,y,z)を用いて、式(1)により求められる。
【0020】
【数1】
【0021】
ここで、俯角による回転処理は、X軸を回転軸とした一次変換処理であるので、回転後のX座標値は回転前と同じものになる。
【0022】
(B3)バンク角によるセンサウインドウの回転と点P,R、S、T、Uの座標位置算出
次に、機体の飛行姿勢であるバンク角φによるセンサウインドウの回転処理を行う。図8にセンサウインドウの回転処理の様子を示す。バンク角は、機体の左右方向の傾き(Y軸回転)として定義しているので、バンク角φによる回転処理は、Y軸を回転軸とした3次元空間における一次変換処理と同等である。
これを踏まえ、俯角回転処理後の点P、R、S、T、Uの座標位置(x’’,y’’,z’’)は、バンク回転前の座標(x’,y’,z’)を用いて式(2)により求められる。
【0023】
【数2】
【0024】
ここで、バンク角による回転処理は、Y軸を回転軸とした3次元一次変換処理であるので、回転後のY座標値は回転前と同じものになる。
【0025】
(B4)飛行方位へのセンサウインドウの回転と点P、R、S、T、Uの座標位置算出
次に、機体の飛行方位である方位角θによるセンサウインドウの回転処理を行う。図9にセンサウインドウの回転処理の様子を示す。飛行方位角は、真北方向を基準とした飛行方位として定義しているので、方位角θによる回転処理はZ軸を回転軸とした3次元空間における一次変換処理と同等である。
これを踏まえ、俯角回転処理後の点P、R、S、T、Uの座標位置(x’’’,y’’’,z’’’)は、飛行方位への回転処理前の座標(x’’,y’’,z’’)を用いて、式(3)により求められる。
【0026】
【数3】
【0027】
ここで、飛行方位角による回転処理は、Z軸を回転軸とした3次元一次変換処理であるので、回転後のZ座標値は、回転前と同じものになる。
【0028】
(B5)点P、R、S、T、U座標の地表面への射影
地上面における撮影包括範囲は、(B1)から(B4)までの一次変換を実施した後の点P、R、S、T、Uを、図10に示すように、地上面へ射影したものとなる。航空機の対地高度はHであるので、原点Oから見た地表面のZ座標値は、−Hに相当する面となる。このことから、センサウインドウ上の点P、R、S、T、Uの地表面への射影点P’、R’、S’、T’、U’は、このZ=−Hに相当する地表面への、ベクトルOP、OR、OS、OT、OUを地表面へ延伸することで得ることができる。
上記ベクトルの延伸率は、各点P、R、S、T、UのZ座標値と地表相当面Z=−Hとの比となることから、地表相当面Z=−H上の各点P’、R’、S’、T’、U’の座標(P’x,P’y,P’z)、(R’x,R’y,R’z)、(S’x,S’y,S’z)、(T’x,T’y,T’z)、(U’x,U’y,U’z)は、以下のとおりとなる。
【0029】
点P’の座標値
P’x:−H/z’’’P*x’’’P
P’y:−H/z’’’P*y’’’P
P’z:−H
点R’の座標値
R’x:−H/z’’’R*x’’’R
R’y:−H/z’’’R*y’’’R
Rz:−H
点S’の座標値
S’x:−H/z’’’S*x’’’S
S’y:−H/z’’’S*y’’’S
S’z:−H
点T’の座標値
T’x:−H/z’’’T*x’’’T
T’y:−H/z’’’T*y’’’T
T’z:−H
点U’の座標値
U’x:−H/z’’’U*x’’’U
U’y:−H/z’’’U*y’’’U
U’z:−H
【0030】
ここで、(x’’’P, y’’’P, z’’’P), (x’’’R, y’’’R, z’’’R), (x’’’S, y’’’S, z’’’S), (x’’’T, y’’’T, z’’’T), (x’’’U, y’’’U, z’’’U)は、飛行方位角への回転を実施した後の点P、R、S、T、Uの座標値である。
【0031】
(B6)−H/z’’’P、−H/z’’’R、−H/z’’’S、−H/z’’’T、−H/z’’’Uが負となる場合の例外処理
図11に示すように、航空機のバンク角と、センサの左右方向の写角の関係により、−H/z’’’P、−H/z’’’R、−H/z’’’S、−H/z’’’T、−H/z’’’Uのいずれかが負となる場合がある。この場合、撮影包括範囲が正常に描画されないことになる。これは、センサの撮影範囲(視野)が地上面以外に空中を含むことになるからであり、撮影包括範囲の描画の際には例外処理を実施する必要がある。
この場合の実際の撮影包括範囲は、図12に示すように、航空機の高度により定まる工学的な見通し限界線により制約を受ける。この場合の例外処理方法は、以下(C1)〜(C3)のとおりとする。また、本処理の概要を図13に示す。
【0032】
(C1)飛行方向への回転処理を終えた段階で、−H/z’’’が負となる頂点について、地表相当面へ射影した位置と、航空機直下の地表相当面位置(0,0,0)との距離dを算出する。dは式(4)により算出できる。
【0033】
【数4】
【0034】
ここで、x’’’、y’’’は、−H/z’’’が負となる点のX座標とY座標の値である。
【0035】
(C2)航空機からの見通し限界距離Dを算出する。ここで、Dは式(5)にて算出する。ただし、式(5)におけるHは、航空機の対地高度である。
【0036】
【数5】
【0037】
(C3)見通し限界点の座標は、(C2)で算出した見通し距離分だけ頂点座標を延伸することで求めることができる。ただし、Z座標値は延伸しない。延伸後の座標は、以下のとおりである。
X座標=x’’’×(D/d)
Y座標=y’’’×(D/d)
Z座標=−H
【0038】
(B7)地表面への射影点R’、S’、T’、U’の描画
最終的な算出結果である(B5)にて得られた点R’、S’、T’、U’のX−Y座標値を元にコンピュータの画面上に描画することで、航空機搭載のセンサによる撮影包括範囲を表示することができる。
【0039】
ステップ8で、このとき、撮影包括範囲内に撮影目標が存在しない場合は、ステップ6に戻り、再度撮影位置を設定し、撮影目標が撮影範囲内に存在するよう、調整する。また、撮影包括範囲に撮影目標が存在する場合は、撮影目標を捕捉可能であることから、図1におけるステップ9に進む。
【0040】
ステップ9(第六のステップ)における最適撮影高度算出に必要なパラメータは、以下の(D1)(D2)のとおりである。
(D1)撮影中央点に関するパラメータ
撮影中央点は、点P’の位置となり、撮影縮尺は、点P’における縮尺として定義する。
このとき、点P’の座標は、
P’x:−H/z’’’P*x’’’P
P’y:−H/z’’’P*y’’’P
P’z:−H
である。
【0041】
(D2)撮影目標の種別と所要の分解能の選択
コンピュータにおいて、撮影目標の種別と、撮影時に必要な分解能を選択する。詳細は以下のとおりである。
目標種別は、撮影目標種別から選択する。(注)所要分解能ファイルに記載された目標種別から選択可能。
所要分解能は、「低分解能」、「中分解能」、「高分解能」から選択する。
焦点距離は、選択された撮影センサに対応する焦点距離である。(注)センサ諸元ファイルに記載の当該センサに対応する焦点距離。
所要分解能を選択することで、所要分解能ファイルに記載された、当該目標の所要分解能に対応する所要撮影縮尺が読み込まれ、最適撮影高度を算出することができる。
【0042】
最適撮影高度の算出は、以下の(E1)(E2)の手順による。
(E1)航空機位置(点O)と撮影包括範囲中点(点P’)間距離(スラント距離)の算出
図14に示されるスラント距離は、式(6)により求めることができる。
【0043】
【数6】
【0044】
(E2)最適撮影高度の算出
撮影縮尺とスラント距離は、以下の関係がある。
撮影縮尺=センサ焦点距離/スラント距離
この式と、(E1)にて算出したスラント距離の関係から、最適撮影高度は、式(7)により算出することができる。
【0045】
【数7】
【0046】
ステップ9にて、最適撮影高度を算出したら、ステップ10で、撮影包括範囲の表示が行われ、また、その算出高度を飛行高度とする場合には、ステップ11で、飛行高度として最適撮影高度を入力する。このとき、ステップ6にて入力した飛行高度と最適撮影高度が異なる場合には、最適撮影高度に対応する撮影包括範囲が自動的に表示される。また、最適撮影高度を飛行高度としない場合には、ステップ12にて任意の飛行高度を入力することができる。
ここでも入力した高度が、ステップ6にて入力した高度と異なる場合には、ステップ12にて入力した高度に対応する撮影包括範囲が自動的に表示される。
【0047】
ステップ13(第七のステップ)では、飛行経路上を飛行する際の、旋回バンク角を入力し、飛行経路の選定に用いる旋回半径を算出する。ここで、旋回バンク角の入力範囲は、以下のとおりである。
−90°(注:右旋回)<旋回バンク角 θ<+90°(注:左旋回)
ここで、旋回半径は、以下の式から算出する。ただし、式中のgは重力加速度を示す。
旋回半径=航空機の対地速度/g×tanθ
【0048】
ステップ14(第八のステップ)では、飛行経路の策定を行う。ステップ14では、図15に示すように、コンピュータ上に飛行線オブジェジェクトを表示し、マウス等の外部入力インターフェースにより、直接、飛行線オブジェクトを配置/移動/縮小/延長することで、経路の策定を実施できる。
【0049】
ステップ14により策定した飛行線の後続通過点として、マウス等の外部入力インターフェースにより通過点を設定でき、ステップ15に進む。この通過点は、上記インターフェースにて任意点を指定できる他、図5に示す位置諸元ファイルに記載の各飛行場、航法援助施設一覧からも指定できるものとする。
【0050】
ステップ15では、ステップ14にて設定した通過点が、ステップ14にて策定した飛行線オブジェクトの延長線上に存在する場合と、しない場合とで処理を区分し、個別に経路を自動的に策定する。図16に示すように、通過点がステップ14にて策定した飛行線オブジェクトの延長線上に存在する場合には、当該飛行線オブジェクトを通過点まで延長する。
一方、図17に示すように、通過点がステップ14にて策定した飛行線オブジェクトの延長線上に存在しない場合は、ステップ16で、旋回経路による経路選定を自動的に実施する。なお、旋回経路の策定に用いられる旋回半径は、ステップ13にて算出された値を用いる。
【0051】
ステップ16における旋回経路の自動策定に用いるパラメータは、旋回半径と、旋回方向と、飛行線開始点と、飛行線終了点と、通過点座標である。ここで、
旋回半径rは、ステップ13にて算出した値である。
旋回方向 右/左は、飛行線から通過点に至る旋回経路上の旋回方向で、「右」、「左」から選択入力する。
飛行線開始点:B(xB,yB)は、旋回経路と接続するステップ14にて選定した飛行線の始点座標である。
飛行線終了点:E(xE,yE)は、旋回経路と接続する、ステップ14にて選定した飛行線の終点座標である。
通過点座標:W(xw,yw)は、ステップ15にて設定した通過点の座標値である。
【0052】
ステップ16における旋回経路の自動策定の手順は、以下の(F1)〜(F3)のとおりである。
ここで、飛行線方位が真北方向または東西方向にある場合は、その手順は非常に簡易であるので、以下では、飛行線方位が上記以外の向きにある場合を想定し、旋回方向として右旋回するものとして説明する。
【0053】
(F1)旋回中心点の算出
図18に示すように、旋回中心点は、飛行線終点を通る半径rの円として定義される。ここで飛行線の傾きは、式(8)により算出される。
【0054】
【数8】
【0055】
ただし、ここでは xE−xB≠0 である。EC→と飛行線は直交し、その長さは旋回半径rと等しいことから、EC→は式(9)のとおり表現される。
【0056】
【数9】
【0057】
ここで、旋回中心点Cの位置ベクトルは、飛行線終点位置ベクトルとの和として表現されることから、式(10)により算出される。
【0058】
【数10】
【0059】
以上の結果から、旋回中心点Cの座標は、式(11)のとおり表現される。
【0060】
【数11】
【0061】
(F2)旋回終了点の算出
図18に示すとおり、旋回終了点Nは、旋回経路上に存在し、通過点Wと直線にて接続される点であり、文字とおり旋回運動の終了点である。点Nは、式(12)による条件を満足する点である。
【0062】
【数12】
【0063】
式(12)の2個の式を解くことで、点Nの座標点を算出することができる。
【0064】
(F3)旋回経路の策定と描画
ステップ16にて、旋回中心点C、旋回終了点Nを算出することで、点Eを始点、点Nを終点とする半径rの円弧と、点Nと通過点Wを直線で結び、これを図19に示すように描画することにより、旋回経路の自動選定が可能となる。
【0065】
ステップ17で、旋回経路の自動策定後、飛行経路の策定を継続する場合は、ステップ14における飛行経路の策定を継続的に実施し、図20に示すように、通過点を任意に設定して旋回経路の自動策定を続けることで、任意の飛行経路長の飛行計画を作成することができる。
ここで、本プログラムにおける飛行経路選定時の始点は、出発飛行場位置、終点は、帰投飛行場位置を前提とする。
また、機体諸元ファイルに記載の燃料消費量は、一般に飛行速度別に異なる値をとるが、以下では、すべてこの飛行速度は、機体諸元ファイルにて対地速度を元に記載されているものとして説明を行う。
【0066】
ステップ17で、飛行経路の策定を終了した後は、ステップ18(第九のステップ)に示す航法計算を行う。ここでの手順は、以下の(G1)〜(G4)のとおりである。
(G1)総飛行経路長の算出
本プログラムにおいて策定した飛行線の飛行線長及び本発明に係るプログラムにおいて自動策定された旋回経路長を総和することで、総飛行経路を算出することができる。したがって、総飛行経路長は、以下の式にて算出される。
総飛行経路長=Σ飛行線長+Σ旋回経路における円弧長
【0067】
(G2)総飛行時間の算出
総飛行時間は、総飛行経路長を飛行速度(対地速度)にて除算することで可能となるため、式(13)にて算出することができる。
【0068】
【数13】
【0069】
(G3)燃料消費量の算出
航空機の燃料消費量を、ステップ14にて策定した飛行線及びステップ16にて自動選定した旋回経路における円弧状の経路毎に算出し、その総和をとることで、総飛行経路における燃料消費量を算出することが可能となる。
図3に示す機体諸元ファイルでは、機体重量、飛行高度、速度毎に、飛行距離1NMあたりの燃料消費量が記載されているので、各飛行線長に対応する燃料消費量を積算することで、総燃料消費量を算出することができる。
ここで、燃料を消費するに従い、機体重量は減少することを勘案し、各飛行線及び旋回経路における円弧の始点における機体重量の減算処理を行う。これは、当該飛行線に至るまでの飛行経路における燃料消費量を算出し、算出した燃料消費量を機体重量から減算することで可能となる。したがって、算出式は、式(14)のとおりである。
【0070】
【数14】
【0071】
ここで、飛行線及び円弧の始点における機体重量は以下の式にて算出される。
【0072】
飛行線及び円弧の始点における機体重量
=(初期機体重量+初期燃料量)−当該飛行線・円弧に至るまでの燃料消費量
【0073】
(G4)残燃料量の算出
飛行経路の終点における残燃料量は、以下の式から算出できる。
残燃料量=初期燃料量−燃料消費量
【0074】
ステップ18における航法計算を終了することにより、本発明におけるプログラムは、ステップ19の正常終了することになる。
【0075】
実施の形態1によれば、航法計算に必要なデータをテーブル形式の電子データでコンピュータで保有した上で、策定された飛行経路に対応する各種航法計算を自動的に実行可能であり、同様にテーブル形式にて保有する航空機搭載センサ諸元と撮影対象の所要分解能から容易に所要分解能に合致する最適な飛行高度を自動算出できることから、航空写真の撮影をその目的とする飛行計画の立案を容易かつ短時間に対応することができる。
また、航法計算に必要な各種諸元は、個々にテーブル形式の電子データでコンピュータ内に保有させ、使用者の意思により、その編集/追加/修正/削除を容易に行え、例えばセンサや航法援助施設に係る各種諸元の追加、削除、変更が容易になっている。
【0076】
また、飛行経路の策定において、マウス等の外部入力インターフェースを用いてコンピュータ画面上に各種オブジェクト(飛行線、通過点)を配置することにより、その経路選定を容易とすることを特徴としており、入力された旋回バンク角と設定した航空機の速度に対応する旋回半径を自動的に算出し、旋回経路を自動描画することで、より簡易に経路選定を実現することができる。
【0077】
さらに、策定された飛行経路について、選択した航空機の種別、気象条件、飛行速度、飛行高度に対応し、その航法計算を自動的に実施し、飛行に必要な燃料量、設定した帰投飛行場上空における残燃料量、飛行距離、総飛行時間、経路上に設定した通過点における通過時間を算出でき、また、経路や高度、速度を再設定した場合においても自動的に再設定後の飛行経路、高度、速度に応じて航法計算を自動的に実施できる。
【0078】
実施の形態2.
航空機の速度は、一般に対地速度(GS)以外にも、対地速度(GS)に対して風力を考慮した真対気速度(TAS)、真対気速度(TAS)に対して大気密度比を考慮した指示対気速度(IAS)、真対気速度(TAS)に対して音速を考慮したMACH数等、多種存在し、図21に示すように、相互に密接な関係を有する。
このことから、実施の形態2によるプログラムでは、速度の相互変換に対応し、気象条件を踏まえた飛行計画の作成を可能とする。このため、以下の機能を有する。
【0079】
真対気速度(TAS)と指示対気速度(IAS)は、当該飛行高度における温度による大気密度により関連付けられることから、本プログラムでは、式(15)の換算式を用いて、入力された飛行速度の相互変換を行うものとする。
【0080】
【数15】
【0081】
ここで、HAは航空機の大気高度、t0は地表面温度(°C)を示す。
【0082】
対地速度(GS)と真対気速度(TAS)は、図22に示す風力三角形の関係を用いて、式(16)により相互変換可能である。
【0083】
【数16】
【0084】
ここで、GSは対地速度ベクトルの大きさ、WSは風力ベクトルの大きさ(風速)、θGは対地速度ベクトルの向き(真北基準)、θWは同様に風の真北を基準とする到来方向である。
【0085】
MACHは、航空機が飛行する高度(大気高度)における音速を基に定義される速度であり、以下の式にて定められる。
MACH=TAS(真対気速度 単位:kt)/Vs
【0086】
ここで、Vsは航空機の飛行高度における音速であり、以下の式から算出できる。
Vs=20.04×{(t0−0.00198×HA)+273}1/2×3600/1852 (kt)
上式において、HAは航空機の大気高度、t0は地表面温度(°C)を示す。
【0087】
実施の形態2によれば、航空機の速度の相互変換に対応し、気象条件を踏まえた飛行計画の作成を可能とする。
【図面の簡単な説明】
【0088】
【図1】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの処理手順を示すフローチャートである。
【図2】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの撮影目標に対応する所要分解能を示す諸元ファイル(所要分解能ファイル)を示す図である。
【図3】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機の各速度及び高度に対応する燃料消費量を示す諸元ファイル(機体諸元アフィル)を示す図である。
【図4】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機に搭載する画像センサ毎の諸元を示す諸元ファイル(センサ諸元ファイル)を示す図である。
【図5】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行場及び航法援助施設の位置を示す諸元ファイル(飛行場/航法援助施設位置諸元ファイル)を示す図である。
【図6】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの撮影包括範囲算出に伴う座標系設定とセンサウインドウを示す図である。
【図7】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのセンサ俯角を考慮したセンサウインドウの回転処理を示す図である。
【図8】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機のバンク角を考慮したセンサウインドウの回転処理を示す図である。
【図9】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの航空機の進行方向への向きを考慮したセンサウインドウの回転処理を示す図である。
【図10】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの回転処理終了後のセンサウインドウの地上相当面への延伸処理を示す図である。
【図11】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのバンク角による撮影包括範囲の算出異常例を示す図である。
【図12】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのバンク角による実際の撮影包括範囲の一例を示す図である。
【図13】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムのバンク角による撮影包括範囲の見通し距離付加処理を示す図である。
【図14】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの撮影包括範囲とスラント距離の関係を示す図である。
【図15】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行線オブジェクトの配置/移動/縮小/延長を示す図である。
【図16】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行線に対する通過点設定(飛行線の延長線上に通過点設定した場合)を示す図である。
【図17】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行線に対する通過点設定(飛行線の延長線上以外に通過点設定した場合)を示す図である。
【図18】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの旋回経路の自動策定の原理を示す図である。
【図19】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの旋回経路の自動選定による旋回経路の描画結果を示す図である。
【図20】この発明の実施の形態1による画像センサ搭載型航空機用航法計算プログラムの飛行経路の策定要領を示す図である。
【図21】この発明の実施の形態2による画像センサ搭載型航空機用航法計算プログラムの対地速度、真対気速度、指示対気速度、MACHの相互関係を示す図である。
【図22】この発明の実施の形態2による画像センサ搭載型航空機用航法計算プログラムの風力三角形の一例を示す図である。
【符号の説明】
【0089】
1 諸元ファイルの作成ステップ
2 諸元ファイルの入力ステップ
3 航空機の選択ステップ
4 撮影目標の選択ステップ
5 撮影目標位置の設定ステップ
6 撮影位置/高度の設定ステップ
7 センサの選択/撮影包括範囲の表示ステップ
8 目標を捕捉可能/不可能の判定ステップ
9 最適高度の算出ステップ
10 撮影包括範囲の表示ステップ
11 最適高度の選定判定ステップ
12 希望高度の入力ステップ
13 旋回バンク角の設定ステップ
14 飛行経路の策定ステップ
15 経路の直線/旋回判定ステップ
16 自動旋回経路策定ステップ
17 経路選定終了判定ステップ
18 航法計算実行ステップ
19 終了
【特許請求の範囲】
【請求項1】
撮影対象となる撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムにおいて、
上記航空機の機種を入力する第一のステップ、
上記撮影目標を入力する第二のステップ、
上記撮影目標の位置を入力する第三のステップ、
上記撮影目標を撮影する航空機の位置及び進行方向を入力する第四のステップ、
上記撮影目標の撮影に用いる上記画像センサの種別を選択することにより、この選択された画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求める第五のステップ、
上記撮影目標を撮影する上記航空機の最適撮影高度を算出する第六のステップ、
上記航空機の旋回バンク角を入力し、上記航空機の飛行経路の策定に用いる旋回半径を算出する第七のステップ、
上記航空機の通過点を入力し、上記第七のステップにより算出された旋回半径を用いて、上記航空機の飛行経路の策定を行う第八のステップ、
及びこの第八のステップにより策定された上記航空機の飛行経路について、航法計算を行う第九のステップを含むことを特徴とする画像センサ搭載型航空機用航法計算プログラム。
【請求項2】
上記第一のステップにより入力される航空機の機種に応じた上記航空機の燃料消費量がファイルされた機体諸元ファイル、上記第五のステップで選択される上記画像センサのデータを有するセンサ諸元ファイル、及び上記第二のステップで入力される撮影目標毎に所要分解能が規定された所要分解能ファイルを作成する第十のステップを含み、上記第十のステップは、上記各ファイルを編集可能にしたことを特徴とする請求項1記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項3】
上記第八のステップでの飛行経路の策定において、画面上にて上記航空機の通過点を外部入力インターフェースを用いて指定するようにしたことを特徴とする請求項1または請求項2記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項4】
上記第八のステップでの飛行経路の策定において、上記航空機の旋回半径及び通過点から、自動的に航空機の旋回経路を策定し、描画することを特徴とする請求項1〜請求項3のいずれかに記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項5】
上記第九のステップの航法計算には、上記航空機の総飛行経路長、総飛行時間、燃料消費量、及び飛行経路の終点における残燃料量の算出を含むことを特徴とする請求項1〜請求項4のいずれかに記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項6】
上記第一のステップ〜上記第八のステップのいずれかで入力値を変更した場合には、上記第九のステップの航法計算結果に反映させることを特徴とする請求項1〜請求項5のいずれかに記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項1】
撮影対象となる撮影目標を画像センサによって撮影する航空機の飛行経路を策定する画像センサ搭載型航空機用航法計算プログラムにおいて、
上記航空機の機種を入力する第一のステップ、
上記撮影目標を入力する第二のステップ、
上記撮影目標の位置を入力する第三のステップ、
上記撮影目標を撮影する航空機の位置及び進行方向を入力する第四のステップ、
上記撮影目標の撮影に用いる上記画像センサの種別を選択することにより、この選択された画像センサによって撮影された画像に包括される地表面の範囲である撮影包括範囲を求める第五のステップ、
上記撮影目標を撮影する上記航空機の最適撮影高度を算出する第六のステップ、
上記航空機の旋回バンク角を入力し、上記航空機の飛行経路の策定に用いる旋回半径を算出する第七のステップ、
上記航空機の通過点を入力し、上記第七のステップにより算出された旋回半径を用いて、上記航空機の飛行経路の策定を行う第八のステップ、
及びこの第八のステップにより策定された上記航空機の飛行経路について、航法計算を行う第九のステップを含むことを特徴とする画像センサ搭載型航空機用航法計算プログラム。
【請求項2】
上記第一のステップにより入力される航空機の機種に応じた上記航空機の燃料消費量がファイルされた機体諸元ファイル、上記第五のステップで選択される上記画像センサのデータを有するセンサ諸元ファイル、及び上記第二のステップで入力される撮影目標毎に所要分解能が規定された所要分解能ファイルを作成する第十のステップを含み、上記第十のステップは、上記各ファイルを編集可能にしたことを特徴とする請求項1記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項3】
上記第八のステップでの飛行経路の策定において、画面上にて上記航空機の通過点を外部入力インターフェースを用いて指定するようにしたことを特徴とする請求項1または請求項2記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項4】
上記第八のステップでの飛行経路の策定において、上記航空機の旋回半径及び通過点から、自動的に航空機の旋回経路を策定し、描画することを特徴とする請求項1〜請求項3のいずれかに記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項5】
上記第九のステップの航法計算には、上記航空機の総飛行経路長、総飛行時間、燃料消費量、及び飛行経路の終点における残燃料量の算出を含むことを特徴とする請求項1〜請求項4のいずれかに記載の画像センサ搭載型航空機用航法計算プログラム。
【請求項6】
上記第一のステップ〜上記第八のステップのいずれかで入力値を変更した場合には、上記第九のステップの航法計算結果に反映させることを特徴とする請求項1〜請求項5のいずれかに記載の画像センサ搭載型航空機用航法計算プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図12】
【公開番号】特開2008−168852(P2008−168852A)
【公開日】平成20年7月24日(2008.7.24)
【国際特許分類】
【出願番号】特願2007−5970(P2007−5970)
【出願日】平成19年1月15日(2007.1.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年7月24日(2008.7.24)
【国際特許分類】
【出願日】平成19年1月15日(2007.1.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]