
画像レーダ装置

【課題】目標の3次元形状を高精度に取得可能な画像レーダ装置を得る。
【解決手段】送信電波W1を照射する電波照射手段4と、目標Tからの受信電波W2に基づき目標T上の反射点の3次元分布を投影面に投影した画像を生成するレーダ画像再生部6と、反射点像を抽出する反射点抽出部8と、反射点像の対応付けを取る画像間反射点対応部9と、対応付けの取れた反射点の、各画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部15と、レーダ画像再生部6で再生される画像の投影面を特定するレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部12と、各画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、各反射点の画像におけるレンジ軸方向およびクロスレンジ軸方向の位置とに基づいて各反射点の3次元位置を推定する目標形状算出部14とを備えている。
【解決手段】送信電波W1を照射する電波照射手段4と、目標Tからの受信電波W2に基づき目標T上の反射点の3次元分布を投影面に投影した画像を生成するレーダ画像再生部6と、反射点像を抽出する反射点抽出部8と、反射点像の対応付けを取る画像間反射点対応部9と、対応付けの取れた反射点の、各画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部15と、レーダ画像再生部6で再生される画像の投影面を特定するレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部12と、各画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、各反射点の画像におけるレンジ軸方向およびクロスレンジ軸方向の位置とに基づいて各反射点の3次元位置を推定する目標形状算出部14とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、送信電波と反射電波からなる受信電波とに基づき遠方の目標を観測して、目標の形状、反射強度分布、種類などを特定する画像レーダ装置に関するものである。
【背景技術】
【0002】
従来の画像レーダ装置においては、異なる時刻に送受信された電波から得られる2枚のレーダ画像(以下、単に「画像」ともいう)を比較して、レーダ画像上の輝点の画像上での速度分布を収集し、適当な方法で画像レーダ装置と目標との相対運動を推定したうえで、相対運動情報を用いて目標上の電波反射点の3次元空間における位置を算出することにより、目標の3次元形状を得ている(たとえば、特許文献1参照)。
【0003】
【特許文献1】特開2001−337163号公報(第5−8頁、図1−図5)
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の画像レーダ装置においては、レーダ画像上の輝点の画像上での速度分布を2枚の画像における各反射点位置の差に基づいて計測しているので、各画像間の変化が小さい場合には速度分布の計測誤差が大きくなり、逆に各画像間の変化が大きい場合には画像間の反射点の対応付けが困難になり、この結果、3次元形状の推定精度が劣化するという課題があった。
【0005】
また、画像レーダ装置と目標との相対運動の推定方法が明確に設定されていないうえ、位相補償後の受信信号をレンジごとにフーリエ変換するのみで画像を生成しているので、位相補償後の各反射点のレンジとドップラ周波数との変化が大きい場合には、画像の分解能が劣化して3次元形状の推定精度が劣化するという課題があった。
【0006】
この発明は、上記課題を解決するためになされたものであり、目標の3次元形状を高精度に推定することのできる画像レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明による画像レーダ装置は、目標に対して送信電波を照射する電波照射手段と、送信電波が目標で反射された反射電波を受信電波として受信する受信手段と、受信電波に基づき目標上の反射点の3次元分布を所定の投影面に投影したレーダ画像を生成するレーダ画像再生部と、レーダ画像上で反射点の像と考えられる反射点像を抽出する反射点抽出部と、複数のレーダ画像のそれぞれに対して抽出された反射点像の対応付けを取る画像間反射点対応部と、複数のレーダ画像の間で対応付けの取れた反射点の、各レーダ画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部と、レーダ画像再生部で再生されるレーダ画像の投影面を特定するレンジ軸およびレンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各レーダ画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部と、レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、レンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定する目標形状算出部とを備えたものである。
【発明の効果】
【0008】
この発明によれば、目標上の各反射点につき、目標と画像レーダ装置との間の相対位置および相対運動で定まる仮想的な平面に投影した場合のレンジおよびクロスレンジの値を算出する処理を複数のレーダ画像で繰り返し、レンジおよびクロスレンジの値を用いた最小2乗法に基づいて目標の3次元形状を推定することにより、高精度の3次元形状推定を実現することができる。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
図1はこの発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。
図1において、画像レーダ装置は、電波照射手段4と、受信機5と、相対位置運動推定部10と、センサ手段13と、目標形状推定部16とを備えている。
目標Tに対して送信電波W1を照射する電波照射手段4は、送信機1と、送受切換器2と、送受信アンテナ3とを備えている。
【0010】
送信機1は、周知の発振器および変調器などを含み、送受切換器2および受信機5とともに、送受信制御部(図示せず)の制御下で駆動される。
送受信アンテナ3は、目標Tに向けて送信電波W1を出射するとともに、送信電波W1が目標Tで反射されて戻ってくる反射電波を受信電波W2として受信する。
【0011】
受信機5は、電波照射手段4内の送受信アンテナ3および送受切換器2とともに、受信電波W2を受信するための受信手段を構成しており、目標Tの位置情報および運動情報を含む受信電波W2を、受信信号として目標形状推定部16に入力する。
相対位置運動推定部10は、各種のセンサ手段13(GPSや加速度センサなど)からの検出情報を取り込み、適宜の処理(後述する)に基づいて、目標Tと画像レーダ装置との間の相対位置および相対運動を推定し、推定結果を目標形状推定部16に入力する。
【0012】
目標形状推定部16は、レーダ画像再生部6と、画像履歴蓄積部7と、反射点抽出部8と、画像間反射点対応部9と、相対位置履歴算出部11と、画像投影面履歴算出部12と、目標形状算出部14と、反射点位置履歴推定部15と、目標形状推定部16とを備え、目標形状推定結果を外部装置(図示せず)に出力する。
レーダ画像再生部6は、受信機5を介した受信電波W2の受信信号に基づいて、目標T上の反射点の3次元分布を所定の投影面に投影したレーダ画像を生成する。
画像履歴蓄積部7は、レーダ画像再生部6から生成された複数のレーダ画像を、画像履歴として蓄積する。
【0013】
反射点抽出部8は、レーダ画像上で反射点の像と考えられる反射点像を抽出し、画像間反射点対応部9は、複数のレーダ画像のそれぞれに対して抽出された反射点像のどれとどれとが同じ反射点像であるかの対応付けを取る。
反射点位置履歴推定部15は、複数のレーダ画像の間で対応付けの取れた反射点の、各レーダ画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する。
【0014】
相対位置履歴算出部11は、相対位置運動推定部10からの相対位置運動推定結果に基づいて、画像レーダ装置と目標Tとの相対位置の変化を特定する。
画像投影面履歴算出部12は、画像レーダ装置と目標Tとの相対位置の変化に基づき、レーダ画像再生部6で再生されるレーダ画像の投影面を特定するレンジ軸およびレンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各レーダ画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する。
【0015】
目標形状算出部14は、画像投影面履歴算出部12からのレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、反射点位置履歴推定部15からのレンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定し、目標形状推定結果を生成する。
【0016】
図2は目標Tの観測状態のジオメトリを概念的に示す説明図であり、一例として、目標Tが航空機であって、画像レーダ装置の送受信アンテナ3の位置3(1)、・・・、3(k)、・・・3(K)が、目標Tに対して相対的に移動する状態を示している。なお、送受信アンテナ3が実際に移動する場合には、目標Tは静止物体であってもよい。
また、目標TはM点の反射点で構成されるものとし、目標T上のm番目の反射点(図2の場合、左翼の先端部)の位置ベクトルをss(m)とする。
図2において、未確認浮遊物体からなる目標Tを中心に考えれば、送受信アンテナ3は、相対的に点線矢印のように、時々刻々と位置3(1)から3(k)、3(K)へと移動する。このとき、画像レーダ装置において、各位置3(1)、3(k)、3(K)で観測される目標Tの3次元(x、y、z)方向の単位ベクトルII_(1)、II_(k)、II_(K)と、反射点mの位置ベクトルss(m)とを示している。
【0017】
また、図3はたとえばISAR(Inverse Synthetic Aperture Radar)などによるレーダ画像の一例を示す説明図であり、横軸は単位ベクトルII_x(k)、縦軸は単位ベクトルII_y(k)を示している。
図3においては、図2内の位置3(k)を中心とする第n番目の切出し範囲で観測したときの反射点mの像の位置ベクトルss(m)の座標が、x(k,m)、y(k,m)で示されている。
なお、図2および図3において、「II」のように、同じ文字「I」を2回重ねて表現した変数は、ベクトルを表すものとする。
【0018】
図4および図5はレーダ画像再生部6による処理を図式的に示す説明図である。
図4においては、時間領域t_x、t_yが示されており、図5においては、周波数領域f_x、f_yが示されている。
また、図4および図5において、破線矢印で示す各単位ベクトルのx軸からy軸への角度ηが示されている。
【0019】
次に、図2〜図5を参照しながら、図1に示したこの発明の実施の形態1に係る画像レーダ装置(以下、単に「レーダ」と略称する)の処理動作について説明する。
まず、送信機1、送受切換器2および送受信アンテナ3により構成される電波照射手段4は、観測対象である目標Tに対して高周波、広帯域の送信電波W1を照射する。
なお、目標Tとしては、たとえば航空機、船舶、車両、地表面、人口構造物など、任意の物体が対象となり得る。
【0020】
目標Tに照射された送信電波W1は、目標Tの表面で反射され、送受信アンテナ3において受信電波W2として受信され、送受切換器2を介して受信機5に入力される。
ここで、送信電波W1が反射される目標Tの表面の部位を、目標T上の「反射点」という。
【0021】
続いて、受信機5は、受信電波W2に含まれる高周波信号を抽出して、目標形状推定部15に送出し、目標形状推定部15は、高周波信号から目標Tの3次元形状を推定する。
一方、相対位置運動推定部10は、目標Tとレーダとの間の相対位置および相対運動を推定する。
【0022】
なお、目標Tとレーダとの間の相対位置および相対運動は、第1の処理方法として、レーダを静止させて目標Tに既知の運動を与える(たとえば、ターンテーブルに目標Tを乗せて回転させる)場合には、レーダの配置と目標Tに与えた運動とから容易に求めることができる。
【0023】
また、第2の処理方法として、レーダを航空機(図2参照)や衛星のような移動プラットフォームに搭載し、レーダから地表面上の固定位置の目標Tを観測するような場合にも、通常はプラットフォームに、プラットフォームの位置を計測するセンサ手段13(たとえば、加速度センサや、GPSなど)が搭載されているので(または、搭載可能なので)、既存のセンサ情報に基づいて相対運動を求めることができる。
【0024】
また、第3の処理方法として、目標Tは自由に運動するが、目標Tに搭載した運動センサ(図示せず)の情報を用いることが可能な場合には、目標Tからのセンサ情報を用いて相対位置および相対運動を推定することができる。
さらに、第4の処理方法として、運動センサの情報を用いることが不可能な目標Tにおいても、目標Tからの受信電波W2の到来方向から目標Tの方位、仰角および伝搬遅延差を定め、これらの方位情報から目標Tまでの距離を定め、この距離情報から3次元位置の時間変化を算出し、この3次元位置の時間変化に一般的な追尾処理を適用することにより、相対位置および相対運動を推定することができる。
【0025】
相対位置運動推定部10は、以上の処理方法により、または、相対位置および相対運動が完全には特定できない場合でも、その他の情報にしたがって相対位置および相対運動の候補を出力する。
このとき、相対位置運動推定部10からの相対運動および相対位置の出力情報の与え方としては、以下のように種々の形態が考えられる。
【0026】
たとえば、第1の形態として、目標Tが運動している場合には、レーダ位置を基準とした時刻t0における目標Tの重心の位置ベクトルrr_c、回転角速度ベクトルww、並進速度ベクトルvvという与え方が便利である。
また、第2の形態として、目標Tが静止していて、レーダが移動している場合には、目標Tの中心(以下、「目標中心」という)を基準とした時刻t0におけるレーダの位置ベクトルrr_c、並進速度ベクトルvvという与え方が便利である。
【0027】
ただし、上記第1および第2の相対運動および相対位置の表現の相違(すなわち、レーダが移動しているのか、目標Tが移動しているのかの相違)は、座標系の定義の相違のみによるものであり、簡単な座標変換で一方から他方へ容易に変換することができる。
以下、目標Tが固定していて、レーダが移動する座標系を用いた場合を例にとって説明するが、これは、レーダを固定した座標系や、レーダおよび目標Tの両者が移動する座標系を選択しても、式の表現が変わるのみであり、本質が変わることはない。
【0028】
目標形状推定部16内において、相対位置履歴算出部11は、相対位置運動推定部10から出力されるレーダと目標Tとの間の相対位置および相対運動を、目標Tに固定された座標系で表現する。
まず、目標T上に設定した原点を基準として、第h番目の観測をした際のレーダの位置ベクトルをrr_rad(h)(hは「ヒット」と称される)で表す。
【0029】
また、観測回数をHとし、ヒットhを1〜Hまで変化させた場合に得られる位置ベクトルrr_rad(h)を、目標Tの位置ベクトルの履歴と称する。
また、前述と同様に、以下において、「rr」、「ss」のように、最初に同じ文字を2回重ねて表現した変数は、ベクトルを表すものとする。
また、ベクトルは、特に説明がない場合には「列ベクトル」であるものとする。
【0030】
次に、画像投影面履歴算出部12は、目標上の3次元の反射強度分布を投影する仮想的な2次元平面(以下、「投影面」または「画像投影面」という)を定義する。
ここでは、H種類の観測データから適当な区分データ列を切出して、K種類のレーダ画像(以下、単に「画像」と略称する)を用いることを想定し、h番目の観測データ列をs(f、h)で表す。
【0031】
ただし、観測データ列s(f、h)内のfは周波数であり、周波数fの振り幅(すなわち、送信帯域幅)は、所望する距離分解能に基づいて設定される。
たとえば、レンジ分解能をΔrに設定するためには、送信帯域幅をC/(2Δr)程度に設定する必要がある。
また、短パルスの送受信やパルス圧縮を行うレーダにおいては、受信信号が伝搬遅延差(すなわち、時間に対する値)として得られることが多い。この場合、受信信号をフーリエ変換して、上記周波数分布の観測データ列s(f、h)に変換しておく。
【0032】
以下、第k番目の画像は、h_ks≦h≦h_keの範囲の観測データ列s(f、h)を用いて生成されるものとする。
第k番目の画像の生成においては、まず、目標中心の位置ベクトルss_ctr(k)を設定する。
なお、目標中心の位置ベクトルss_ctr(k)は、座標の原点にとってもよいし、これ以外にとってもよい。また、すべての変数kを通じて同じ値にしてもよいし、変えてもよい。
【0033】
各レーダ位置と上記目標中心とを結ぶ直線が同一平面上に乗っている場合(たとえば、目標位置を基準としたレーダの位置変化が直線で表される場合)などにおいては、その平面を画像投影面として選択すればよいが、上記直線が同一平面上に乗らない場合には、何らかの近似演算により、投影面を特定する必要がある。
ここでは、最小2乗法などの方法を用いて平面を特定するものとし、各レーダ位置から目標中心に向かうベクトルdd_ctr(k,h)は、以下の式(1)で与えられる。
【0034】
dd_ctr(k,h)=ss_ctr(k)−rr_rad(h)・・・(1)
【0035】
また、上記ベクトルdd_ctr(k,h)の長さをl_ctr(k,h)とすると、各レーダ位置から目標中心に向かう単位ベクトルii_ctr(k,h)は、以下の式(2)で与えられる。
【0036】
ii_ctr(k,h)=dd_ctr(k,h)/l_ctr(k,h)・・・(2)
【0037】
ここで、投影面の法線を与える単位ベクトルをII_z(k)とすると、単位ベクトルII_z(k)は、目標中心に向かう単位ベクトルii_ctr(h、k)との内積の2乗和を最小化する問題、すなわち、以下の式(3)の値A0を最小化する問題に帰着させて求めることができる。
【0038】
A0=transpose(II_z(k))A(k)transpose(A(k))II_z(k)・・・(3)
【0039】
ただし、式(3)において、A(k)は、以下の式(4)で与えられる行列である。
【0040】
A(k)=[rr_rad(h_ks)、rr_rad(h_ks+1)、・・・、rr_rad(h_ke−1)、rr_rad(h_ke)]・・・(4)
【0041】
また、transpose(X)を、ベクトルまたは行列Xの転置を得る演算として定義する。
なお、上記式(3)の最小化問題では、II_z(k)が単位ベクトルであることから、以下の式(5)による拘束条件が課せられる。
【0042】
1−transpose(II_z(k))II_z(k)=0・・・(5)
【0043】
ここでは、式(5)の拘束条件付の最適化問題をラグランジュの未定乗数法で解くことにする。
まず、以下の式(6)で表される行列B(k)を導入する。
【0044】
B(k)=A(k)transpose(A(k))・・・(6)
【0045】
ここで、行列B(k)は、対称行列となる。
次に、拘束条件付の評価関数B2(II_z(k))を、以下の式(7)で与える。
【0046】
B2(II_z(k))=transpose(II_z(k))B(k)II_z(k)+g(k)(1−transpose(II_z(k))II_z(k))・・・(7)
【0047】
ただし、式(7)において、g(k)は第k画像におけるラグランジュ乗数である。
ここで、上記評価関数B2が極値をとるためには、評価関数B2を単位ベクトルII_z(k)で微分した値がゼロとなること、すなわち、以下の式(8)を満足する必要がある。
【0048】
2B(k)II_z(k)−2g(k)II_z(k)=0・・・(8)
【0049】
式(8)は固有方程式であり、第k画像におけるラグランジュ乗数g(k)および単位ベクトルII_z(k)は、それぞれ、行列B(k)の固有値および固有ベクトルに対応する。
固有値をg_1(k)、g_2(k)、g_3(k)(ただし、g_1(k)≦g_2(k)≦g_3(k))とし、各固有値に対応する固有ベクトルをee_1(k)、ee_2(k)、ee_3(k)(いずれも単位ベクトル)とすると、これらを上記式(7)に代入することにより、以下の式(9)が得られる。
【0050】
B2(ee_a(k))=transpose(ee_a(k))g_a(k)ee_a(k)=g_a(k)・・・(9)
【0051】
ただし、式(9)において、a=1、2、3である。
式(9)のように、評価値が固有値になることから、単位ベクトルII_z(k)を最小固有値に対応する固有ベクトルee_1(k)と平行なベクトルとすると、単位ベクトルII_z(k)は、±ee_1(k)のいずれの符号のベクトルとしてもとり得る。
【0052】
なお、複数の画像を動画として表示する際には、各画像ごとに単位ベクトルII_z(k)の符号が反転すると、画像上の目標像も反転してしまうので、単位ベクトルII_z(k)を、以下の式(10)、式(10A)のように、前回の単位ベクトルII_z(k−1)の向きに近い方の符号をつけた単位ベクトルee_1(k)とすることもできる。
【0053】
II_z(k)=ee_1(k) ・・・(10)
II_z(k)=sgn(transpose(II_z(k−1))ee_1(k))ee_1(k)・・・(10A)
【0054】
ただし、式(10)は、k=1の場合の演算式を示し、式(10A)は、k≧2の場合の演算式を示す。
また、式(10A)において、sgn(X)は変数Xの符号を得るオペレータである。
画像中心を通り、かつ法線が単位ベクトルII_z(k)で与えられる平面が画像投影面となる。
【0055】
次に、画像投影面の平面上で直交する2軸を定義する。
まず、レーダから目標中心への方向に向かうレンジ軸方向の単位ベクトルII_x(k)を、単位ベクトルii_ctr(h)との内積の2乗和を最大化するベクトルとして得る。
ここでも、レンジ軸方向のベクトルII_x(k)が単位ベクトルであるという拘束条件があり、結果として、法線の単位ベクトルII_z(k)を得たときと同じ固有方程式に帰着させて解くことができる。
【0056】
この場合、レンジ軸方向の単位ベクトルII_x(k)は、最大固有値g_3(k)に対応する固有ベクトルee_3(k)に平行なベクトルとなる。
法線の単位ベクトルII_z(k)の場合も、同様に、符号の問題が発生し、このベクトルII_z(k)の符号も、正負どちらの値でも構わない。
ここでは、単位ベクトルii_ctr(h)と方向が近くなる方の符号を採用することにして、以降の説明を進める。そのために、以下の式(11)により、レンジ軸方向の単位ベクトルII_x(k)を得る。
【0057】
II_x(k)=sgn(mean(transpose(A(k))ee_3(k)))ee_3(k)・・・(11)
【0058】
ただし、式(11)において、mean(aa)は、配列(aa)の全要素の平均値を得るオペレータとして定義される。
最後に、法線の単位ベクトルII_z(k)と、レンジ軸方向の単位ベクトルII_x(k)との両者に直交する単位ベクトルII_y(k)を、以下の式(12)のように得る。
【0059】
II_y(k)=II_z(k)×II_x(k)・・・(12)
【0060】
ただし、式(12)において、「aa×bb」はベクトルaaとベクトルbbの外積演算を示す。
単位ベクトルII_y(k)のベクトル方向の軸を、以下では「クロスレンジ軸」と呼ぶ。
以上のように、画像投影面履歴算出部12は、式(1)〜(12)で得られた単位ベクトルII_x(k)、II_y(k)、II_z(k)を出力する。
【0061】
次に、レーダ画像再生部6は、画像投影面履歴(単位ベクトルII_x(k)、II_y(k)、II_z(k))に基づき、受信電波W2から画像を生成する。
ここでは、画像再生方法として、一般的なPFA(ポーラーフォーマットアルゴリズム)を想定して説明する。
PFAにおいては、画像を2次元フーリエ変換して得られる周波数平面上で、受信信号の周波数分布を、前述の投影面上での見込角に依存した角度ηに配置する。
【0062】
図4は目標T上の反射強度分布を時間領域で表示している。
図4において、原点は、前述の投影面上の画像中心である。
また、横軸t_xおよび縦軸t_yは、それぞれ、投影面上での単位ベクトルII_x(k)、II_y(k)方向の長さを、2/v_c倍(ただし、v_cは光速)して得られる時間である。
【0063】
また、目標中心に向かう単位ベクトルii_ctr(k,h)の方向を、レンジ軸方向の単位ベクトルII_x(k)からクロスレンジ軸方向の単位ベクトルII_y(k)に向かう方向を正とする角度ηで与えている。
角度ηをヒットhと変数kの関数η(k,h)とすると、関数η(k,h)は、以下の式(13)で表される。
【0064】
η(k,h)=atan((transpose(II_y(k))ii_ctr(h))/(transpose(II_x(k))ii_ctr(h)))・・・(13)
【0065】
ただし、式(13)において、atan(X)は、数値Xの逆正接を得るオペレータである。
【0066】
一方、図5は目標T上の反射強度分布を周波数領域で表示している。
図5において、横軸f_xおよび縦軸f_yは、それぞれ、時間t_x、t_yに対応する周波数を表しており、角度η(k,h)の方向から収集した受信信号の周波数分布は、f_x、f_yの周波数平面上でf_xからf_y方向に測った角度η方向の軸上で、周波数が原点からの距離となる位置に配置される。
【0067】
これにより、角度η(k,h)(目標とレーダの位置関係)を変えながら収集した受信信号の周波数分布は、上記手順にしたがって周波数平面上に配置して得られる扇状の受信信号分布に対し、図5内の点線に示すような矩形マトリクス状に並ぶサンプル点を設定して、各サンプル点における受信信号の値を補間することにより推定演算される。
【0068】
図5から得られた各サンプル点における受信信号の補間値を、周波数f_xおよびf_y方向に逆フーリエ変換することにより、図4のように、目標Tの反射強度分布の時間t_x、t_yを軸とする時間波形が得られる。
図4の時間波形の軸をそれぞれv_c/2倍することにより、目標T上の反射強度分布の空間分布が得られる。
【0069】
以上のように、レーダ画像再生部6は、図4および図5の処理により、各変数kにおける画像を得る。
なお、ここでは、レーダ画像再生部6による処理方法として、PFAを用いた場合について説明したが、PFAのみに限定される訳ではなく、たとえば、以下の(a)〜(d)に示す一般的方法を用いても、目的とする目標Tの反射強度の空間分布を表す画像を生成することができる。
【0070】
(a)レンジドップラーアルゴリズム+クロスレンジスケーリング、
(b)バックプロジェクションアルゴリズム、
(c)レンジマイグレーションアルゴリズム、
(d)チャープスケーリングアルゴリズム
【0071】
次に、画像履歴蓄積部7は、各変数kごとに得られた画像を蓄積する。
また、反射点抽出部8は、各画像において、閾値処理や探索処理に基づき複数の反射点を抽出する。
また、画像間反射点対応部9は、画像履歴蓄積部7に蓄積された後、各画像ごとに反射点抽出部8により抽出した反射点のエコーを、各画像間で照合し、各画像のどのエコーとどのエコーとが同じ反射点のエコーであるかの対応付けを取る。
【0072】
このとき、対応付けの取り方としては、以下のように種々の方法が考えられる。
たとえば、第1の対応付け方法として、隣接する第k番目と第k+1番目との画像間で、それぞれ抽出された各反射点のうち、距離の最も小さいもの同士を同じ反射点と考える方法が考えられる。
【0073】
また、第2の対応付け方法として、カルマンフィルタなどの理論に基づいて、たとえば1枚目〜k枚目の画像での対応結果に基づいて、k+1枚目の画像での反射点の発生位置を予測し、その予測値に近い位置の反射点と対応付ける方法が考えられる。
【0074】
また、第3の対応付け方法として、反射点の(複素)振幅値が近い反射点を対応付ける方法が考えられ、この場合は、第k番目の反射点における値のみを用いてもよく、また、第1番目〜第k番目の同じ反射点の像の振幅の平均値や2乗平均値を用いてもよい。
さらに、第4の対応付け方法として、抽出された反射点付近の区分画像を切り出したうえで、各画像で切り出した区分画像間の相関演算に基づいて、各画像間で類似する反射点の組を決定する方法も考えられる。
【0075】
以上のように、画像間反射点対応部9は、第1〜第4の方法を単体で、または組合せて使用することにより、画像間の反射点の対応付けを取る。
また、第k+1番目の画像において、第k番目の画像と対応付けられる点を決定するために、第k番目の画像における注目する像の位置に最も近いピークを探索する方法も考えられる。
【0076】
上記ピーク探索方法の場合、反射点抽出部8および画像間反射点対応部9は、まず、第1番目の画像において反射点を抽出する。
その後、画像間反射点対応部9は、2番目以降の画像において、上記のように1つ前の画像における抽出結果に近いピークを探索して抽出する。
【0077】
次に、反射点位置履歴推定部15は、第m反射点の画像上のピーク位置のxおよびy方向の画素番号に基づき、投影面上での、画像中心を基準としたx方向の位置x(k,m)と、画像中心を基準としたy方向の位置y(k,m)とを計算する。
【0078】
たとえば、折り返しを考慮した、原点との画素番号の差が、x方向に+Nx1、y方向に+Ny1で、かつ1画素あたりのx、y方向の距離分解能がそれぞれDx、Dyの場合について考える。
このとき、第m反射点のx方向の位置(画像中心基準)は+Nx1で与えられ、Dx、y方向の位置は+Ny1、Dyで与えられる。
【0079】
ここで、第m反射点の3次元の位置ベクトルss(m)は、第k画像に関連するパラメータを用いて、以下の式(14)のように表される。
【0080】
ss(m)=ss_ctr(k)+x(k,m)II_x(k)+y(k,m)II_y(k)+z(k,m)II_z(k)・・・(14)
【0081】
ただし、式(14)において、z(k,m)は、第k画像単体からは推定困難な、画像に直交する方向の反射点の座標である。
式(14)の両辺と、単位ベクトルII_x(k)およびII_y(k)との内積を算出すると、それぞれ以下の式(15)、式(16)が得られる。
【0082】
transpose(II_x(k))ss(m)=transpose(II_x(k))ss_ctr(k)+x(k,m)・・・(15)
transpose(II_y(k))ss(m)=transpose(II_y(k))ss_ctr(k)+y(k,m)・・・(16)
【0083】
ここで、以下の式(17)〜式(20)で表される行列Ax0、Ay0および行ベクトルbbx0(m)、bby0(m)を導入する。
【0084】
Ax0=[II_x(1)、II_x(2)、・・・、II_x(K)]・・・(17)
Ay0=[II_y(1)、II_y(2)、・・・、II_y(K)]・・・(18)
bbx0(m)=[transpose(II_x(1))ss_ctr(1)+x(1、m)、transpose(II_x(2))ss_ctr(2)+x(2、m)、・・・、transpose(II_x(K))ss_ctr(K)+x(K、m)]・・・(19)
bby0(m)=[transpose(II_y(1))ss_ctr(1)+y(1、m)、transpose(II_y(2))ss_ctr(2)+y(2、m)、・・・、transpose(II_y(K))ss_ctr(K)+y(K、m)]・・・(20)
【0085】
また、式(17)〜式(20)から、まず、xに関する行列Ax0および行ベクトルbbx0(m)を用いて、以下の式(21)、(22)の行列A(m)および列ベクトルbb(m)を生成するものとする。
【0086】
A(m)=transpose(Ax0) ・・・(21)
bb(m)=transpose(bbx0(m))・・・(22)
【0087】
したがって、式(21)、式(22)を、k=1、・・・、Kまで合わせることにより、以下の式(23)のような関係が得られる。
【0088】
A(m)ss(m)=bb(m)・・・(23)
【0089】
この場合、以下の式(24)で与えられるAの一般化逆行列A_invを用いることにより、以下の式(25)のように、最小2乗法に基づいて、第m反射点の3次元の位置ベクトルss(m)を推定することができる。
【0090】
A_inv(m)=inv(transpose(A(m))A(m))transpose(A(m))・・・(24)
ss(m)=A_inv(m)bb(m)・・・(25)
【0091】
ただし、式(24)、式(25)において、inv(X)は正方行列Xの逆行列を得るオペレータである。
同様に、yに関する行列およびベクトルを用いて、以下の式(26)、式(27)のようにA(m)およびbb(m)を生成しても、上記式(24)〜(25)を用いて、位置ベクトルss(m)を推定することができる。
【0092】
A(m)=transpose(Ay0)・・・(26)
bb(m)=transpose(bby0(m))・・・(27)
【0093】
また、xおよびyに関する行列およびベクトルの両者を用いて、以下の式(28)、式(29)のようにAおよびbb(m)を生成しても、上記式(24)〜(25)を用いて、位置ベクトルss(m)を推定することができる。
【0094】
A(m)=transpose([Ax0、Ay0])・・・(28)
bb(m)=transpose([bbx0(m)、bby0(m)])・・・(29)
【0095】
さらに、xおよびyに関する行列およびベクトルから、適当に選択した変数kの配列(たとえば、k=ka、kb、kc、・・・)に関する、xまたはyから、または、xおよびyの両者から、部分的な行列および列ベクトルを切り出して得られる部分的な行列およびベクトルの組を、前述と同様に、A(m)、bb(m)と置くことによっても、位置ベクトルss(m)を推定することができる。
【0096】
変数kの部分配列の設定方法の指標としては、種々考えられるが、注目する反射点(たとえば、第m反射点)として対応する点が存在しない画像を省いた配列や、対応する反射点の評価値が低い画像(たとえば、発生予測位置との距離が遠い反射点が選択された画像)の配列などの利用が考えられる。
【0097】
このことを踏まえて、反射点位置履歴推定部15は、画像中心を基準としたx、y方向の位置x(k,m)およびy(k,m)に加えて、出力データの信頼度wgt(k,m)(たとえば、0≦wgt(k,m)≦1で、「1」に近づくにつれて信頼度が増大)を出力するように構成されているものとする。
【0098】
また、すべての出力データに信頼度の差をつけない場合には、wgt(k,m)に同じ値(たとえば、「1」)を入れて出力すればよい。
また、各画像で目標中心の位置ベクトルss_ctr(m)を等しい値ss_ctrとする場合には、上記式(19)、(20)は、以下の式(30)、式(31)のように簡単化することができる。
【0099】
bbx0(m)=[x(1、m)、x(2、m)、・・・、x(K、m)]・・・(30)
bby0(m)=[y(1、m)、y(2、m)、・・・、y(K、m)]・・・(31)
【0100】
また、この場合、上記式(25)は、以下の式(32)に変形される。
【0101】
ss(m)=A_inv(m)bb(m)+ss_ctr・・・(32)
【0102】
ただし、相対的な位置関係のみが分かればよい場合には、目標中心の位置ベクトルは不要になる。
この場合、式の表現上では、上記式(25)をそのまま用いることができる。
以上のように、レーダ画像再生部6、画像履歴蓄積部7、反射点抽出部8、画像間反射点対応部9および反射点位置履歴推定部15により、反射点位置履歴が所得される。
【0103】
次に、目標形状算出部14による目標形状の推定処理動作について説明する。
まず、目標形状算出部14は、画像投影面履歴算出部12からの出力情報(画像投影面履歴)に基づいて、行列Ax0、Ay0を生成する。
また、目標形状算出部14は、画像投影面履歴算出部12の出力情報(画像投影面履歴)と、反射点位置履歴推定部15からの出力情報(反射点位置履歴)とに基づき、行ベクトルbbx0(m)、bby0(m)を生成する。
【0104】
次に、目標形状算出部14は、行列Ax0、Ay0と、行ベクトルbbx0(m)、bby0(m)とに基づき、上述したような各種方法のいずれか、または各種方法の組合せを用いて、行列A(m)および列ベクトルbb(m)を生成し、最終的には、上記式(24)〜(25)に基づいて、各反射点mの位置ベクトルss(m)を推定する。
【0105】
目標形状算出部14は、上記推定処理を各反射点について繰り返し実行することにより、目標T上の各反射点の位置ベクトルssを推定する。このとき、各反射点の位置ベクトルssの集合を目標Tの3次元形状と呼ぶ。
また、目標Tの種類を特定するためには、目標T上の各反射点の反射強度そのものの値も重要な情報となる。そこで、上記各反射点の位置ベクトルssに加えて、各画像(言い換えると、各観測方向付近)での各反射点の反射強度の値Amp(k,m)を出力してもよい。
【0106】
以上のように、この発明の実施の形態1によれば、目標Tに対して送信電波W1を照射する電波照射手段4と、送信電波W1が目標Tで反射されて戻ってくる受信電波W2を受信する受信機5と、受信電波W2に基づき目標T上の反射点の3次元分布を所定の投影面に投影した画像を生成するレーダ画像再生部6と、画像上で反射点の像と考えられる反射点像を抽出する反射点抽出部8と、複数の画像のそれぞれに対して抽出された反射点像の対応付けを取る画像間反射点対応部9と、複数の画像の間で対応付けの取れた反射点の、各画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部15と、レーダ画像再生部6で再生される画像の投影面を特定するレンジ軸およびレンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部12と、レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、レンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定する目標形状算出部14とを備え、目標T上の各反射点につき、目標Tとレーダとの間の相対位置および運動で定まる仮想的な平面に投影した場合の、レンジおよびクロスレンジの値を算出する処理を、複数の画像で繰り返し実行し、これらのレンジおよびクロスレンジの値を用いて、最小2乗法に基づき3次元形状を推定するようにしたので、高精度の推定を実現することができる。
【0107】
また、目標Tとの間の相対位置および相対運動に関する検出情報を生成するセンサ手段13と、検出情報、既知の位置および運動の変化情報、または、目標Tの観測結果に基づく追尾処理に基づいて、目標Tとの間の相対位置および相対運動の変化を相対位置運動推定結果として特定または推定する相対位置運動推定部10と、相対位置運動推定結果に基づいて、目標Tとの相対位置の変化を特定する相対位置履歴算出部11とを備え、画像投影面履歴算出部は、相対位置履歴算出部により得られた目標との相対位置の変化に基づいて、レンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定するように構成し、目標Tとレーダとの間の相対位置および相対運動の変化推定方法を明確化しているので、上記3次元形状の推定を確実に実現することができる。
【0108】
また、画像投影面履歴算出部12は、レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、各画像を生成するデータとを得るために目標Tの位置関係を変えながら観測する際に、各レーダ位置を始点とした目標T上の目標中心までの距離と、各レーダ位置を基準とした目標中心の方向の単位ベクトルとレンジ軸ベクトルおよびクロスレンジ軸ベクトルとの内積値とに基づいて、レーダ位置を基準とした目標方向の単位ベクトルと投影面に投影した方向のレンジ軸からの角度ηを取得し、レーダ画像再生部6は、レンジ軸ベクトル、クロスレンジ軸ベクトルおよび角度レーダを基準とした目標方向の単位ベクトルと投影面に投影した方向のレンジ軸からの角度ηおよび目標Tまでの距離に基づいて、レンジ軸およびクロスレンジ軸を2軸とする画像を生成するようにしたので、高精度の推定を実現することができる。
【0109】
また、画像投影面履歴算出部12は、各画像を生成するデータを得るために目標Tとの位置関係を変えながら観測する際に、各レーダ位置を始点とした目標中心までの距離と、各レーダ位置を基準とした目標T上の目標中心方向の各単位ベクトルに基づいて、ラグランジュ乗数法により、長さが「1」という制約条件の下に、各単位ベクトルとの内積値の2乗平均値が最小となる単位ベクトルを決定し、内積値の2乗平均値が最小となる単位ベクトルを投影面の法線ベクトルとし、また、長さが「1」という制約条件の下で、各単位ベクトルとの内積値が最大となる単位ベクトルを決定し、内積値が最大となる単位ベクトルをレンジ軸ベクトルとし、法線ベクトルとレンジ軸ベクトルとの外積演算に基づいてクロスレンジ軸ベクトルを算出する。
また、画像間反射点対応部9は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、反射点抽出部で抽出された各反射点像を対応付ける際に、各画像の間で抽出された各反射点像の間の距離を算出し、各反射点像の間の距離が最小となる組合せを選択する。
【0110】
これにより、画像の投影面の法線を、レーダと目標Tとの相対位置を変えながら画像再生用のデータを収集する際の、それぞれの位置関係におけるレーダから目標Tに向かう単位ベクトルとの内積の2乗平均値が最小となるように選択するので、再生画像の歪みを低減して3次元形状の推定精度を向上させることができる。
また、隣接するフレームの画像間で、レンジ軸ベクトルを、それぞれの位置関係におけるレーダから目標Tに向う単位ベクトルとの内積の2乗平均値が最大となる方向に選択し、かつレンジ軸ベクトルの符号を、レンジ軸ベクトルとレーダから目標Tに向う各単位ベクトルとの内積の平均値の符号が負とならないように選択するので、隣接するフレーム間で急に画像が反転するような状態を回避することができる。
また、それぞれの画像におけるレンジ軸ベクトルまたはクロスレンジ軸ベクトルから行列を生成し、また、各画像における各反射点のレンジまたはクロスレンジから列ベクトルを生成し、上記行列の一般化逆行列と列ベクトルとを用いて、最小2乗法により形状を推定するので、推定精度を向上させることができる。
また、この際、反射点の対応付けの信頼度に基づいて、信頼度の高いデータを用いて形状を推定することにより、信頼度の低いデータを用いる場合よりもさらに推定精度を向上させることができる。
【0111】
また、画像投影面履歴算出部12は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、レンジ軸またはクロスレンジ軸の方向が急に反転することを防ぐために、第k+1番目の画像の投影面の法線方向の単位ベクトルの符号を、第k番目の画像の投影面の法線ベクトルとの内積値が正となるように選択し、かつ、レンジ軸ベクトルの方向が、各レーダ位置を基準とした目標方向の単位ベクトルと一致するように、レンジ軸ベクトルの符号を、各レーダ位置を基準とした目標方向の単位ベクトルとの内積値の平均値が正になるように選択する。
【0112】
これにより、隣接するフレームの画像間で画像投影面の法線方向の単位ベクトルの内積の符号を正にするように、各ベクトルの符号を設定するので、隣接するフレーム間で急に画像が反転するような状態を回避することができる。
また、隣接するフレームの画像間で、レンジ軸ベクトルを、それぞれの位置関係におけるレーダから目標Tに向う単位ベクトルとの内積の2乗平均値が最大となる方向に選択し、かつレンジ軸ベクトルの符号を、レンジ軸ベクトルとレーダから目標Tに向う各単位ベクトルとの内積の平均値の符号が負とならないように選択するので、隣接するフレーム間で急に画像が反転するような状態を回避することができる。
【0113】
また、画像間反射点対応部9は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、反射点抽出部8で抽出された各反射点像を対応付ける際に、第k番目までの画像上の同じ反射点像と考えられる抽出結果の位置に基づいて、カルマンフィルタ理論を用いて第k+1番目の画像における反射点像の出現位置を予測し、反射点像の予測位置に最も近い反射点像を第k+1番目の反射点像とする。
これにより、画像の隣接するフレーム間で、どの反射点とどの反射点とが対応するかを、各画像の間での反射点間の距離や、カルマンフィルタ理論に基づく予測位置との距離、各反射点の振幅値などに基づいて特定するので、対応付け精度が向上し、この結果、目標Tの3次元形状の推定精度を向上させることができる。
【0114】
また、目標形状算出部14は、注目する反射点についてのK行1列、2K行1列またはK’行1列の列ベクトルの各要素のうち、各画像におけるレンジの値の代わりに、レンジの値に目標中心のレンジを加えた値を設定するとともに、各画像におけるクロスレンジの値の代わりに、クロスレンジの値に目標中心のクロスレンジを加えた値を設定する。
また、反射点位置履歴推定部15は、各反射点の各画像間の対応付け結果に基づいて、隣接する画像における同じ反射点との距離が大きい画像、または、反射点の存在しない画像の信頼度の重みを小さく設定し、同じ反射点との距離が小さい画像の信頼度の重みを大きく設定し、目標形状算出部14は、信頼度の重みに閾値を設定して、信頼度の重みが閾値を越えたK’枚の画像についてのみ、レンジ軸ベクトルまたはクロスレンジ軸ベクトルを用いて一般化逆行列を生成し、選択された画像についてのみ、レンジまたはクロスレンジの値を用いてK’行1列の列ベクトルを生成し、一般化逆行列およびK’行1列の列ベクトルに基づいて反射点の位置ベクトルを推定する処理を各反射点ごとに繰り返し実行して、各反射点の位置ベクトルを推定する。
これにより、目標Tの3次元形状を推定する際に、各画像ごとに、目標中心の位置ベクトルを考慮してレンジおよびクロスレンジの値を補正するので、各画像ごとに目標中心の位置ベクトルの設定値を変化させても、高精度に3次元形状を推定することができる。
【0115】
また、目標形状算出部は14、推定された目標Tの3次元形状(目標T上の各反射点の3次元位置)に加えて、各反射点の反射強度値を出力するので、目標Tの識別に用いる情報量を増やすことができ、識別性能をさらに向上させることができる。
【0116】
また、画像間反射点対応部9は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、反射点抽出部8で抽出された各反射点像を対応付ける際に、第k番目の画像上の反射点の振幅または振幅分布、または、第k番目までの画像における同じ反射点の振幅値の平均値に近い反射点像を第k+1番目の画像上で抽出された反射点像から探索して対応付けするので、高精度の推定を実現することができる。
【0117】
また、目標形状算出部14は、画像投影面履歴算出部12で得られたK枚の画像における各レンジ軸ベクトルを3行1列の列ベクトルと見なし、列ベクトルをK列合わせて3行K列の行列を生成するとともに、行列を転置した行列Aを生成し、反射点位置履歴推定部15で得られた各反射点のK枚の画像におけるレンジを構成要素としたK行1列の列ベクトルを生成し、行列Aの一般化逆行列とK行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、各反射点の位置ベクトルを推定して出力するので、高精度の推定を実現することができる。
【0118】
また、目標形状算出部14は、画像投影面履歴算出部12で得られたK枚の画像における各クロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、列ベクトルをK列合わせて3行K列の行列を生成するとともに、行列を転置した行列Aを生成し、反射点位置履歴推定部15で得られた各反射点のK枚の画像におけるクロスレンジを構成要素としたK行1列の列ベクトルを生成し、行列Aの一般化逆行列とK行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、各反射点の位置ベクトルを推定するので、高精度の推定を実現することができる。
【0119】
また、目標形状算出部14は、画像投影面履歴算出部12で得られたK枚の画像における各レンジ軸ベクトルおよびクロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、列ベクトルをK列合わせて3行2K列の行列を生成するとともに、行列を転置した行列Aを生成し、反射点位置履歴推定部15で得られた各反射点のK枚の画像におけるレンジおよびクロスレンジを構成要素とした2K行1列の列ベクトルを生成し、行列Aの一般化逆行列と2K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、各反射点の位置ベクトルを推定するので、高精度の推定を実現することができる。
【0120】
実施の形態2.
なお、上記実施の形態1(図1)では、目標形状算出部14の算出結果を目標形状推定結果としたが、図6のように、目標形状逐次推定部19に関連した次フレーム反射点位置予測部18を設け、次フレーム反射点位置予測部18を介して目標形状推定結果を出力してもよい。
図6はこの発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。
【0121】
図6において、前述(図1参照)と同様のものについては、前述と同一符号が付されている。
また、目標形状逐次推定部19は、前述の目標形状推定部16に対応し、目標形状逐次推定部19内の逐次形状考慮反射点対応部17は、前述の画像間反射点対応部9に対応している。
この場合、図1内の画像間反射点対応部9は、図6内の逐次形状考慮反射点対応部17として機能する。
【0122】
画像投影面履歴算出部12および目標形状算出部14には、次フレーム反射点位置予測部18が接続され、次フレーム反射点位置予測部18は、逐次形状考慮反射点対応部17に接続されている。
次フレーム反射点位置予測部18は、画像投影面履歴算出部12からの画像投影面履歴と、目標形状算出部14の算出結果とに基づいて、目標形状推定結果を出力する。
また、次フレーム反射点位置予測部18からの目標形状推定結果は、目標形状逐次推定部19内の逐次形状考慮反射点対応部17にフィードバックされる。
【0123】
具体的には、次フレーム反射点位置予測部18は、フレーム番号が連続する第k番目の画像までのデータを用いて目標形状算出部6で得られた目標形状と、画像投影面履歴算出部12で得られた第k+1番目のレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、第k+1番目の画像における目標中心の位置ベクトルとに基づいて、第k+1番目の画像における各反射点のレンジとクロスレンジを推定する。
【0124】
また、逐次形状考慮反射点対応部17は、次フレーム反射点位置予測部18で得られた第k+1番目の画像における各反射点のレンジとクロスレンジの推定結果を、レーダ画像再生部6で生成されかつ画像履歴蓄積部7で蓄積された第k+1番目の画像について、反射点抽出部8で抽出された各反射点像のレンジおよびクロスレンジと比較し、両者が最も近い各反射点を対応付ける。
反射点位置履歴推定部15は、逐次形状考慮反射点対応部17による対応付け結果に基づいて、各反射点ごとのレンジおよびクロスレンジの履歴を算出する。
【0125】
次に、図6に示したこの発明の実施の形態2に係る画像レーダ装置の処理動作について説明する。
前述の実施の形態1では、生成したすべての画像から抽出した反射点を対応付けた後に目標Tの形状を推定したが、各画像間の反射点の対応付けは、一般に、反射点の数が多くなるにつれて困難になると考えられる。
【0126】
そこで、この発明の実施の形態2による次フレーム反射点位置予測部18は、第k番目の画像までを用いて推定した各反射点の3次元位置の推定結果に基づいて、第k+1番目(次フレーム)の画像上での各反射点の位置を予測し、k+1番目の各反射点の予測位置に近い位置に存在する反射点と対応付けする。
以下、この対応付け処理を、変数kの値を増やしながら繰り返し実行することにより、対応付け精度を向上させ、結果として、目標Tの3次元形状の推定精度を向上させることができる。
【0127】
目標形状逐次推定部19は、まず、事前に設定した値kまでのデータを用いて、前述と同様に目標Tの3次元形状を推定する。
このとき、目標形状逐次推定部19内の逐次形状考慮反射点対応部17は、前述(図1参照)の画像間反射点対応部9と同一の動作をする。
【0128】
こうして、第k番目の画像までを用いて推定した第m反射点の位置ベクトルをss_est(k,m)とする。
これに基づき、次フレーム反射点位置予測部18は、第k+1番目の画像におけるm番目の反射点の、第k+1投影面上での、画像中心を基準としたx座標とy座標の予測値x_est(k+1、m)およびy_est(k+1、m)を、以下の式(33)、式(34)のように算出する。
【0129】
x_est(k+1、m)=II_x(k+1)(ss_est(k,m)−ss_ctr(k+1))・・・(33)
y_est(k+1、m)=II_y(k+1)(ss_est(k,m)−ss_ctr(k+1))・・・(34)
【0130】
逐次形状考慮反射点対応部17では、反射点抽出部8で抽出された第k+1番目の画像上の反射点と次フレーム反射点位置予測部18で得られた各反射点の第k+1番目の画像上の位置の予測値を比較し、予測値と近い位置に発生した点との対応を取る。
以下、この処理を、変数kの値を増やしながら繰り返し実行する。
【0131】
以上のように、この発明の実施の形態2によれば、レーダ画像再生部6から生成された複数のレーダ画像を画像履歴として蓄積する画像履歴蓄積部7と、フレーム番号が連続する第k番目のレーダ画像までのデータを用いて目標形状算出部14で得られた目標形状と、画像投影面履歴算出部12で得られた第k+1番目のレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、第k+1番目のレーダ画像における目標中心の位置ベクトルとに基づいて、第k+1番目のレーダ画像における各反射点のレンジとクロスレンジを推定する次フレーム反射点位置予測部18と、次フレーム反射点位置予測部18で得られた第k+1番目のレーダ画像における各反射点のレンジとクロスレンジの推定結果を、レーダ画像再生部6で生成されかつ画像履歴蓄積部7で蓄積された第k+1番目のレーダ画像について反射点抽出部8で抽出された各反射点像のレンジおよびクロスレンジと比較し、両者が最も近い各反射点を対応付ける逐次形状考慮反射点対応部17とを備え、反射点位置履歴推定部15は、逐次形状考慮反射点対応部17による対応付け結果に基づいて、各反射点ごとのレンジおよびクロスレンジの履歴を算出することにより、対応付けの精度を向上させて、3次元形状の推定精度を向上させることができる。
【0132】
実施の形態3.
なお、上記実施の形態2(図6)では、目標形状逐次推定部19に関連した次フレーム反射点位置予測部18を設けたが、図7のように、前処理目標形状推定部20に関連した区分フレーム列内推定形状蓄積部22、区分フレーム列内推定形状対応部23、反射点位置履歴統合部24および統合形状算出部25を設け、統合形状算出部25から目標形状推定結果を出力してもよい。
【0133】
図7はこの発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。
図7において、前述(図1、図6参照)と同様のものについては、前述と同一符号が付されている。
また、前処理目標形状推定部20は、前述(図1)の目標形状推定部16に対応し、前処理目標形状推定部20内において、区分フレーム列内反射点対応部21、区分フレーム列内目標形状算出部26および区分フレーム反射点位置履歴推定部27は、それぞれ、前述の画像間反射点対応部9、目標形状算出部14および反射点位置履歴推定部15に対応する。
【0134】
この場合、図1内の画像間反射点対応部9は、図7内の区分フレーム列内反射点対応部21として機能し、図1内の目標形状算出部14は、図7内の区分フレーム列内目標形状算出部26として機能し、図1内の反射点位置履歴推定部15は、図7内の区分フレーム反射点位置履歴推定部27として機能する。
【0135】
区分フレーム列内目標形状算出部26には、区分フレーム列内推定形状蓄積部22が接続され、区分フレーム列内推定形状蓄積部22には、区分フレーム列間推定形状対応部23が接続されている。
区分フレーム反射点位置履歴推定部27および区分フレーム列間推定形状対応部23には、反射点位置履歴統合部24が接続されている。
また、画像投影面履歴算出部12および反射点位置履歴統合部24には、統合形状算出部25が接続されている。
【0136】
前処理目標形状推定部20内の画像履歴蓄積部7は、前述と同様に、レーダ画像再生部6から生成されたレーダ画像の履歴を蓄積する。
区分フレーム列内反射点対応部21は、反射点抽出部8で得られた各レーダ画像における反射点の抽出結果の対応付けを検討して、レーダ画像のフレーム列を複数の区分フレーム列に分離し、各区分フレーム列ごとに反射点間の対応付けを取る。
【0137】
区分フレーム反射点位置履歴推定部27は、区分フレーム列内反射点対応部21による対応付け結果に基づいて、各区分フレームごとに反射点のレンジおよびクロスレンジの履歴を算出する。
区分フレーム列内目標形状算出部26は、画像投影面履歴算出部12の算出結果および区分フレーム反射点位置履歴推定部27の推定結果に基づいて、各区分フレームごとに各反射点の3次元の位置ベクトルを推定する。
【0138】
区分フレーム列内推定形状蓄積部22は、区分フレーム列内目標形状算出部26により各区分フレームごとに得られた各反射点の3次元の位置ベクトルを蓄積する。
区分フレーム列間推定形状対応部23は、区分フレーム列内推定形状蓄積部22内の蓄積データを読出し、各区分フレーム列ごとに各反射点について得られた3次元の位置ベクトルを比較し、各反射点間の距離が小さい反射点同士を同じ反射点と見なす。
【0139】
反射点位置履歴統合部24は、区分フレーム列間推定形状対応部23により同じ反射点と見なされた反射点について、区分フレーム反射点位置履歴推定部27で得られた各反射点の画像上のレンジおよびクロスレンジの履歴を統合する。
統合形状算出部25は、反射点位置履歴統合部で統合された各反射点のレンジおよびクロスレンジ位置と、画像投影面履歴算出部で得られたレンジ軸ベクトルおよびクロスレンジ軸ベクトルに基づいて、前述の目標形状算出部14(図6参照)と同様に、各反射点の3次元位置を推定して目標形状推定結果を出力する。
【0140】
次に、図7に示したこの発明の実施の形態3に係る画像レーダ装置の処理動作について説明する。
前述の実施の形態2では、第k番目までの画像を用いて各反射点の3次元位置を推定し、この推定結果を用いて第k+1番目の画像における各反射点の発生位置を予測し、この予測位置と発生位置の情報とに基づいて第k+1番目の反射点を対応付けた。しかし、異なる位置に存在し、かつ投影面上でのx座標とy座標が偶然一致するような複数の反射点が存在する場合には、これらの反射点を分離することができず、対応付けも困難になる可能性がある。
【0141】
ところが、上記のように投影面上でのx座標とy座標が偶然一致するような反射点であっても、3次元空間内で比較することができれば、比較結果の情報に基づいて上記反射点を分離して対応付けを取ることができるので、誤った対応付けを低減させることが可能なことが分かる。
【0142】
このような考え方に基づき、この発明の実施の形態3では、全画像を各反射点ごとに、または全反射点につき、対応付けが容易な複数の区分フレームに分離し、各区分フレームごとに得られた3次元形状を推定する。
したがって、この発明の実施の形態3においては、各区分フレームで得られた3次元形状を3次元空間内で比較して対応付けすることで、2次元画像のみを用いた対応付けが困難なことに起因した対応付けの失敗を低減することを目的としている。
【0143】
図7に示す前処理目標形状推定部20において、まず、区分フレーム列内反射点対応部21は、反射点抽出部8で得られた各画像間の反射点の対応付けを検討し、画像のフレーム列を、高精度な反射点間の対応付けが可能であると期待できる区分フレーム列に分離したうえで、各区分フレーム列ごとに、そのフレーム列内での反射点の対応付けを行う。
【0144】
続いて、区分フレーム反射点位置履歴推定部27は、各区分フレームごとに対応の取られた各反射点の位置の履歴を算出し、区分フレーム列内目標形状算出部26は、その区分フレーム列内データのみを用いて目標形状を推定する。
前処理目標形状推定部20は、上記処理を区分フレーム列を変えながら繰り返し、これを区分フレーム列内推定形状蓄積部22に蓄積する。
【0145】
次に、区分フレーム列間推定形状対応部23は、各区分フレーム列内で推定された各反射点の3次元位置を比較して対応付けを取る。
また、反射点位置履歴統合部24は、区分フレーム列間推定形状対応部23での対応付けの結果に基づいて、区分フレーム反射点位置履歴推定部27に蓄積された投影面上での各反射点の位置の履歴を統合する。
【0146】
最後に、統合形状算出部25は、反射点位置履歴統合部24で対応の取られた各反射点の各投影面での位置履歴と、画像投影面履歴算出部24で得られた画像投影面の履歴とに基づいて、前述の目標形状算出部14と同様の処理により、各反射点の3次元位置を推定し、最終的な目標形状推定結果として出力する。
【0147】
上述したように、この発明の実施の形態3によれば、3次元空間内で反射点間の対応を取ることにより、2次元画像のみを用いて対応付けを行う場合に比較して、対応付けの失敗を低減することができ、結果として、3次元形状の推定精度を向上させることができる。
【0148】
なお、一般に、対応付けが困難になるフレームは、各反射点ごとに異なると推測されるので、区分フレーム列内反射点対応部21からの画像を区分フレームに分割する処理は、必ずしも、全反射点で同時に対応付けが容易な区分フレームに分離する必要がなく、もっと条件を緩めて、各反射点ごとに、区分フレームの区切り方を変えても適用できることは言うまでもない。
【0149】
実施の形態4.
なお、上記実施の形態1(図1)では、目標形状算出部14の算出結果を目標形状推定結果としたが、図8のように、画像投影面推定誤差考慮目標形状算出部29の算出結果を目標形状推定結果としてもよい。
図8はこの発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。
図8において、前述(図1参照)と同様のものについては、前述と同一符号が付されている。
また、画像投影面推定誤差考慮目標形状推定部30は、前述の目標形状推定部16に対応し、画像投影面推定誤差考慮目標形状推定部30内の誤差比率推定部28および画像投影面推定誤差考慮目標形状算出部29は前述の目標形状算出部14に対応している。
【0150】
この場合、画像投影面履歴算出部12および反射点位置履歴推定部15には、それぞれ、誤差比率推定部28および画像投影面推定誤差考慮目標形状算出部29が接続され、誤差比率推定部28には、画像投影面推定誤差考慮目標形状算出部29が接続されている。
誤差比率推定部28は、画像投影面履歴算出部12からの画像投影面履歴と、反射点位置履歴推定部15からの反射点位置履歴とに基づいて、画像投影面履歴および反射点位置履歴に含まれる推定誤差量の誤差比率を算出する。
すなわち、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値に含まれる誤差と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に含まれる推定誤差の大きさとの誤差比率を算出して、画像投影面推定誤差考慮目標形状算出部29に入力する。
【0151】
また、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部28により推定された誤差比率の値を用い、画像投影面の推定値に含まれる誤差を考慮しながら、目標T上の各反射点の3次元位置を推定する。すなわち、画像投影面推定誤差考慮目標形状算出部29は、画像投影面履歴算出部12からのレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、反射点位置履歴推定部15からのレンジ軸方向およびクロスレンジ軸方向の各位置と、誤差比率推定部28により推定された誤差比率とに基づいて、各反射点の3次元位置を推定し、目標形状推定結果として生成する。
【0152】
たとえば、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、特異値分解処理の結果として得られる特異値分布から定義されるエントロピー量を用い、エントロピー量を最大とする定数を誤差比率の推定値として出力する。
【0153】
または、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、特異値分解処理の結果として得られる特異値分布から定義される非等方性度を用い、非等方性度を最小とする定数を誤差比率の推定値として出力する。
【0154】
また、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部により推定された誤差比率の推定値をスケーリング係数として利用しながら、たとえばスケールド・トータル・リースト・スクエア(Scaled Total Least Square)法によって各反射点の3次元位置を推定する。
【0155】
前述の実施の形態1においては、目標形状算出部14は、式(24)、式(25)を用いて、最小2乗法によって各反射点の3次元位置を推定し、目標形状推定結果として生成しており、行列A(m)には誤差が含まれていないことを前提としている。しかし、行列A(m)の各行は、画像投影面履歴算出部12により算出された画像投影面のレンジ軸ベクトルおよびクロスレンジ軸ベクトルの推定値であり、推定誤差(以下、「画像投影面推定誤差」という)を含み得る値である。
【0156】
一方、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値にも、推定誤差(以下、「反射点位置推定誤差」という)が含まれる。
画像投影面推定誤差が反射点位置推定誤差に比べて十分に小さい場合は、前述の実施の形態1のように、式(24)、式(25)を用いて各反射点の3次元位置を推定することが可能であるが、画像投影面推定誤差が大きい場合には、目標形状推定結果に含まれる誤差が極めて大きくなる問題がある。
【0157】
そこで、図8において、誤差比率推定部28は、画像投影面推定誤差の大きさと、反射点位置推定誤差の大きさとの比率を算出し、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部28によって算出された誤差の大きさの比率に基づき、たとえばScaled Total Least Square法によって各反射点の3次元位置を推定し、目標形状推定結果を生成する。
これにより、画像投影面推定誤差が大きい場合における目標Tの3次元形状の推定精度を向上させることができる。
【0158】
一般に、Ax=B(A、B、xは行列)という線形システムにおいて、行列Aの観測値と行列Bの観測値とから行列xを推定する問題を考えた場合、行列Aおよび行列Bの観測値には誤差が含まれるという前提で、最適な行列xを推定する1つの方法が、Scaled Total Least Square法と呼ばれる方式である。
【0159】
Scaled Total Least Square法は、行列Aおよび行列Bの観測値には誤差が含まれると仮定しながら、その誤差の2乗平均を最小化するように、行列xを算出するという考え方に基づく方式である。
換言すると、Scaled Total Least Square法は、(A+E)xγ=Bγ―Gを満足する条件の下で、行列[E G]のフロビニウス・ノルム(Frobenius norm)を最小化する行列xを算出する方式である。ここで、γは、行列Aの観測値に含まれる誤差の標準偏差と、行列Bの観測値に含まれる誤差の標準偏差との誤差比率に対応した正の定数(以下、「スケーリング係数」という)である。
Scaled Total Least Square法の問題点は、スケーリング係数γが未知の場合に適用できないことである。
【0160】
そこで、この発明の実施の形態4においては、図8のように、画像投影面推定誤差考慮目標形状算出部29によるScaled Total Least Square法を用いた各反射点の3次元位置推定処理の前に、誤差比率推定部28により、スケーリング係数γを誤差比率として推定する構成を採用している。
【0161】
次に、図8に示したこの発明の実施の形態4に係る画像レーダ装置の処理動作について説明する。
まず、誤差比率推定部28は、画像投影面履歴算出部12からの出力情報(画像投影面履歴)に基づいて、行列Ax0、Ay0を生成する。また、目標形状算出部14は、画像投影面履歴算出部12の出力情報(画像投影面履歴)と、反射点位置履歴推定部15からの出力情報(反射点位置履歴)とに基づき、前述の式(29)のように、列ベクトルbb(m)を生成する。
次に、誤差比率推定部28は、行列Ax0、Ay0と、列ベクトルbb(m)、bb(m)とに基づき、以下の式(35)、式(36)のように、行列A、Bを生成する。行列Aは、行数「2K」、列数「3」の行列からなり、行列Bは、行数「2K」、列数「M」の行列からなる。
【0162】
A=transpose([Ax0、Ay0])・・・(35)
B=[bb(1)、bb(2)、・・・、bb(M)])・・・(36)
【0163】
次に、誤差比率推定部28は、スケーリング係数γを用いて、以下の式(37)のように、行列C(γ)を生成する。行列C(γ)は、行数「2K」、列数「3+M」の行列からなる。
【0164】
C(γ)=[A、γB]・・・(37)
【0165】
なお、式(37)で用いられるスケーリング係数γの値は、ゼロよりも大きい任意の値でよい。ただし、画像投影面推定誤差および反射点位置推定誤差の標準偏差の大きさの概算値が既知である場合や、他の何らかのセンサ情報などから或る程度推定できる場合には、以下の式(38)で計算されるスケーリング係数γの値を用いてもよい。
【0166】
γ=εa/εb・・・(38)
【0167】
ただし、式(38)において、εaは、画像投影面推定誤差の標準偏差の概算値であり、εbは、反射点位置推定誤差の標準偏差の概算値である。
次に、誤差比率推定部28は、行列Cの特異値分解処理を実行する。特異値分解処理の結果は、以下の式(39)のように記述され得る。
【0168】
C(γ)=U(γ)Σ(γ)transpose(V(γ))・・・(39)
【0169】
式(39)において、U(γ)は、左特異値ベクトルを集めた行列であり、行数「2K」、列数「2K」の行列からなる。
また、Σ(γ)は、行数「2K」、列数「3+M」の行列からなり、その対角要素((1、1)要素、(2、2)要素・・・、(N、N)要素)は、特異値σ(1)、σ(2)、・・・、σ(N)である。ただし、特異値の数「N」は、「2K」または「3+M」のいずれか小さいほうの値と一致する。
また、V(γ)は、右特異値ベクトルを集めた行列であり、行数「3+M」、列数「3+M」の行列からなる。
さらに、行列Σ(γ)の対角要素である特異値σ(1)、σ(2)、・・・、σ(N)は、以下の式(40)の関係を満たす。
【0170】
σ(1)≧σ(2)≧・・・≧σ(N)・・・(40)
【0171】
次に、誤差比率推定部28は、特異値分解処理の結果として得られた特異値を用いて、以下の式(41)によって定義されるエントロピー量E(γ)を算出する。
【0172】
E(γ)=−P(4)log_(N−3)(P(4))
−P(5)log_(N−3)(P(5))
・
・
・
−P(N)log_(N−3)(P(N))・・・(41)
【0173】
ただし、式(41)において、log_(N−3)は、「N−3」を底とする対数を意味する。また、エントロピー量E(γ)は、「0」以上、「1」以下の値をとる量であり、σ(4)、σ(5)、・・・、σ(N)の値のばらつきを測る指標である。すなわち、エントロピー量E(γ)の値は、σ(4)、σ(5)、・・・、σ(N)の値がすべて等しい場合には最大値「1」となり、逆に、σ(4)、σ(5)、・・・、σ(N)の値の域が広いほど低下する。
さらに、P(j)(j=4、5、・・・、N)は、以下の式(42)のように表すことができる。
【0174】
P(j)=σ(j)/(σ(4)+σ(5)+・・・+σ(N))・・・(42)
【0175】
次に、誤差比率推定部28は、スケーリング係数γの値を一定量だけ変化させながら、上記式(37)〜式(42)で表される処理を反復して実行する。なお、反復回数は、事前に設定された所定回数とする。この反復処理の結果、スケーリング係数γの各値に対して、エントロピー量E(γ)が算出される。
【0176】
スケーリング係数γが、画像投影面推定誤差の標準偏差の真の値と、反射点位置推定誤差の標準偏差の真の値との誤差比率と一致する場合、エントロピー量E(γ)は、最大値「1」に近いことが期待される。
また、前述のAx=Bという線形システムにおいて、右辺の行列Bの各列は、左辺の行列Aの各列によって張られる線形空間内に存在するので、行列A、Bに観測誤差が含まれない場合、σ(4)、σ(5)、・・・、σ(N)の値はすべてゼロである。したがって、σ(4)、σ(5)、・・・、σ(N)がゼロでない場合、その値は観測誤差に起因する値である。
【0177】
さらに、観測誤差が白色雑音でモデル化できる場合には、σ(4)=σ(5)=・・・=σ(N)の関係を満たすことが期待されるので、この場合、エントロピー量E(γ)は最大値「1」となる。よって、スケーリング係数γの値が正しい場合、エントロピー量E(γ)は、最大値「1」に近い値をとることが期待される。
このことを踏まえて、誤差比率推定部28は、最終的に、エントロピー量E(γ)を最大とするスケーリング係数γの値を、誤差比率の推定値として出力する。
【0178】
また、誤差比率推定部28は、上記式(41)で定義されるエントロピー量E(γ)の代わりに、以下の式(43)のように定義される非等方性度a(γ)を用いてもよい。
【0179】
a(γ)=(σ(4)^2−σ(N)^2)/(σ(4)^2+σ(N)^2)・・・(43)
【0180】
非等方性度a(γ)を用いる場合、誤差比率推定部28は、非等方性度a(γ)を最小とするスケーリング係数γの値を誤差比率の推定値として出力する。
この場合、スケーリング係数γの値の推定精度は、エントロピー量E(γ)を用いた場合に比べて劣化する可能性が高いが、非等方性度a(γ)の値を算出するための演算量が、エントロピー量E(γ)を算出するための演算量に比べて少ないという利点がある。
【0181】
次に、画像投影面推定誤差考慮目標形状算出部29は、まず、誤差比率推定部28の出力したスケーリング係数γの値を用いて、上記式(37)〜式(39)で表される処理を実行する。
続いて、画像投影面推定誤差考慮目標形状算出部29は、式(39)で表される特異値分解の結果得られた右特異値ベクトルを集めた行列V(γ)の値を用いて、各反射点mの位置ベクトルss(m)の推定値(行列S)を式(44)によって算出する。
【0182】
S=−V(1:3、4:M+3)inv(V(4:M+3,4:M+3))・・・(44)
【0183】
なお、式(44)において、行列Sのm列目は、反射点mの位置ベクトルss(m)の推定値となる。
【0184】
以上のように、この発明の実施の形態4によれば、誤差比率推定部28は、画像投影面推定誤差の標準偏差の真の値と、反射点位置推定誤差の標準偏差の真の値との誤差比率を推定し、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部28によって推定された誤差比率の推定値を利用して、たとえばScaled Total Least Square法により、目標Tの3次元形状(各反射点の3次元位置)を推定するようにしたので、画像投影面推定誤差が大きい場合の3次元形状の推定精度を向上させることができる。
【0185】
また、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、特異値分解処理の結果として得られる特異値分布から定義されるエントロピー量または非等方性度を用い、エントロピー量を最大とする定数または非等方性度を最小とする定数を誤差比率の推定値として出力するので、画像投影面推定誤差が大きい場合の3次元形状の推定精度を向上させることができる。
【図面の簡単な説明】
【0186】
【図1】この発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。
【図2】この発明の実施の形態1における目標の観測状態のジオメトリを概念的に示す説明図である。
【図3】この発明の実施の形態1によるレーダ画像の一例を示す説明図である。
【図4】この発明の実施の形態1に係るレーダ画像再生部による処理を図式的に示す説明図である。
【図5】この発明の実施の形態1に係るレーダ画像再生部による処理を図式的に示す説明図である。
【図6】この発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。
【図7】この発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。
【図8】この発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。
【符号の説明】
【0187】
1 送信機、3 送受信アンテナ、4 電波照射手段、5 受信機、6 レーダ画像再生部、7 画像履歴蓄積部、8 反射点抽出部、9 画像間反射点対応部、10 相対位置運動推定部、11 相対位置履歴算出部、12 画像投影面履歴算出部、13 センサ手段、14 目標形状算出部、15 反射点位置履歴推定部、16 目標形状推定部、17 逐次形状考慮反射点対応部、18 次フレーム反射点位置予測部、19 目標形状逐次推定部、20 前処理目標形状推定部、21 区分フレーム列内反射点対応部、22 区分フレーム列内推定形状蓄積部、23 区分フレーム列間推定形状対応部、24 反射点位置履歴統合部、25 統合形状算出部、28 誤差比率推定部、29 画像投影面推定誤差考慮目標形状算出部、部30 画像投影面推定誤差考慮目標形状推定部、W1 送信電波、W2 受信電波、T 目標。
【技術分野】
【0001】
この発明は、送信電波と反射電波からなる受信電波とに基づき遠方の目標を観測して、目標の形状、反射強度分布、種類などを特定する画像レーダ装置に関するものである。
【背景技術】
【0002】
従来の画像レーダ装置においては、異なる時刻に送受信された電波から得られる2枚のレーダ画像(以下、単に「画像」ともいう)を比較して、レーダ画像上の輝点の画像上での速度分布を収集し、適当な方法で画像レーダ装置と目標との相対運動を推定したうえで、相対運動情報を用いて目標上の電波反射点の3次元空間における位置を算出することにより、目標の3次元形状を得ている(たとえば、特許文献1参照)。
【0003】
【特許文献1】特開2001−337163号公報(第5−8頁、図1−図5)
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の画像レーダ装置においては、レーダ画像上の輝点の画像上での速度分布を2枚の画像における各反射点位置の差に基づいて計測しているので、各画像間の変化が小さい場合には速度分布の計測誤差が大きくなり、逆に各画像間の変化が大きい場合には画像間の反射点の対応付けが困難になり、この結果、3次元形状の推定精度が劣化するという課題があった。
【0005】
また、画像レーダ装置と目標との相対運動の推定方法が明確に設定されていないうえ、位相補償後の受信信号をレンジごとにフーリエ変換するのみで画像を生成しているので、位相補償後の各反射点のレンジとドップラ周波数との変化が大きい場合には、画像の分解能が劣化して3次元形状の推定精度が劣化するという課題があった。
【0006】
この発明は、上記課題を解決するためになされたものであり、目標の3次元形状を高精度に推定することのできる画像レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明による画像レーダ装置は、目標に対して送信電波を照射する電波照射手段と、送信電波が目標で反射された反射電波を受信電波として受信する受信手段と、受信電波に基づき目標上の反射点の3次元分布を所定の投影面に投影したレーダ画像を生成するレーダ画像再生部と、レーダ画像上で反射点の像と考えられる反射点像を抽出する反射点抽出部と、複数のレーダ画像のそれぞれに対して抽出された反射点像の対応付けを取る画像間反射点対応部と、複数のレーダ画像の間で対応付けの取れた反射点の、各レーダ画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部と、レーダ画像再生部で再生されるレーダ画像の投影面を特定するレンジ軸およびレンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各レーダ画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部と、レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、レンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定する目標形状算出部とを備えたものである。
【発明の効果】
【0008】
この発明によれば、目標上の各反射点につき、目標と画像レーダ装置との間の相対位置および相対運動で定まる仮想的な平面に投影した場合のレンジおよびクロスレンジの値を算出する処理を複数のレーダ画像で繰り返し、レンジおよびクロスレンジの値を用いた最小2乗法に基づいて目標の3次元形状を推定することにより、高精度の3次元形状推定を実現することができる。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
図1はこの発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。
図1において、画像レーダ装置は、電波照射手段4と、受信機5と、相対位置運動推定部10と、センサ手段13と、目標形状推定部16とを備えている。
目標Tに対して送信電波W1を照射する電波照射手段4は、送信機1と、送受切換器2と、送受信アンテナ3とを備えている。
【0010】
送信機1は、周知の発振器および変調器などを含み、送受切換器2および受信機5とともに、送受信制御部(図示せず)の制御下で駆動される。
送受信アンテナ3は、目標Tに向けて送信電波W1を出射するとともに、送信電波W1が目標Tで反射されて戻ってくる反射電波を受信電波W2として受信する。
【0011】
受信機5は、電波照射手段4内の送受信アンテナ3および送受切換器2とともに、受信電波W2を受信するための受信手段を構成しており、目標Tの位置情報および運動情報を含む受信電波W2を、受信信号として目標形状推定部16に入力する。
相対位置運動推定部10は、各種のセンサ手段13(GPSや加速度センサなど)からの検出情報を取り込み、適宜の処理(後述する)に基づいて、目標Tと画像レーダ装置との間の相対位置および相対運動を推定し、推定結果を目標形状推定部16に入力する。
【0012】
目標形状推定部16は、レーダ画像再生部6と、画像履歴蓄積部7と、反射点抽出部8と、画像間反射点対応部9と、相対位置履歴算出部11と、画像投影面履歴算出部12と、目標形状算出部14と、反射点位置履歴推定部15と、目標形状推定部16とを備え、目標形状推定結果を外部装置(図示せず)に出力する。
レーダ画像再生部6は、受信機5を介した受信電波W2の受信信号に基づいて、目標T上の反射点の3次元分布を所定の投影面に投影したレーダ画像を生成する。
画像履歴蓄積部7は、レーダ画像再生部6から生成された複数のレーダ画像を、画像履歴として蓄積する。
【0013】
反射点抽出部8は、レーダ画像上で反射点の像と考えられる反射点像を抽出し、画像間反射点対応部9は、複数のレーダ画像のそれぞれに対して抽出された反射点像のどれとどれとが同じ反射点像であるかの対応付けを取る。
反射点位置履歴推定部15は、複数のレーダ画像の間で対応付けの取れた反射点の、各レーダ画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する。
【0014】
相対位置履歴算出部11は、相対位置運動推定部10からの相対位置運動推定結果に基づいて、画像レーダ装置と目標Tとの相対位置の変化を特定する。
画像投影面履歴算出部12は、画像レーダ装置と目標Tとの相対位置の変化に基づき、レーダ画像再生部6で再生されるレーダ画像の投影面を特定するレンジ軸およびレンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各レーダ画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する。
【0015】
目標形状算出部14は、画像投影面履歴算出部12からのレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、反射点位置履歴推定部15からのレンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定し、目標形状推定結果を生成する。
【0016】
図2は目標Tの観測状態のジオメトリを概念的に示す説明図であり、一例として、目標Tが航空機であって、画像レーダ装置の送受信アンテナ3の位置3(1)、・・・、3(k)、・・・3(K)が、目標Tに対して相対的に移動する状態を示している。なお、送受信アンテナ3が実際に移動する場合には、目標Tは静止物体であってもよい。
また、目標TはM点の反射点で構成されるものとし、目標T上のm番目の反射点(図2の場合、左翼の先端部)の位置ベクトルをss(m)とする。
図2において、未確認浮遊物体からなる目標Tを中心に考えれば、送受信アンテナ3は、相対的に点線矢印のように、時々刻々と位置3(1)から3(k)、3(K)へと移動する。このとき、画像レーダ装置において、各位置3(1)、3(k)、3(K)で観測される目標Tの3次元(x、y、z)方向の単位ベクトルII_(1)、II_(k)、II_(K)と、反射点mの位置ベクトルss(m)とを示している。
【0017】
また、図3はたとえばISAR(Inverse Synthetic Aperture Radar)などによるレーダ画像の一例を示す説明図であり、横軸は単位ベクトルII_x(k)、縦軸は単位ベクトルII_y(k)を示している。
図3においては、図2内の位置3(k)を中心とする第n番目の切出し範囲で観測したときの反射点mの像の位置ベクトルss(m)の座標が、x(k,m)、y(k,m)で示されている。
なお、図2および図3において、「II」のように、同じ文字「I」を2回重ねて表現した変数は、ベクトルを表すものとする。
【0018】
図4および図5はレーダ画像再生部6による処理を図式的に示す説明図である。
図4においては、時間領域t_x、t_yが示されており、図5においては、周波数領域f_x、f_yが示されている。
また、図4および図5において、破線矢印で示す各単位ベクトルのx軸からy軸への角度ηが示されている。
【0019】
次に、図2〜図5を参照しながら、図1に示したこの発明の実施の形態1に係る画像レーダ装置(以下、単に「レーダ」と略称する)の処理動作について説明する。
まず、送信機1、送受切換器2および送受信アンテナ3により構成される電波照射手段4は、観測対象である目標Tに対して高周波、広帯域の送信電波W1を照射する。
なお、目標Tとしては、たとえば航空機、船舶、車両、地表面、人口構造物など、任意の物体が対象となり得る。
【0020】
目標Tに照射された送信電波W1は、目標Tの表面で反射され、送受信アンテナ3において受信電波W2として受信され、送受切換器2を介して受信機5に入力される。
ここで、送信電波W1が反射される目標Tの表面の部位を、目標T上の「反射点」という。
【0021】
続いて、受信機5は、受信電波W2に含まれる高周波信号を抽出して、目標形状推定部15に送出し、目標形状推定部15は、高周波信号から目標Tの3次元形状を推定する。
一方、相対位置運動推定部10は、目標Tとレーダとの間の相対位置および相対運動を推定する。
【0022】
なお、目標Tとレーダとの間の相対位置および相対運動は、第1の処理方法として、レーダを静止させて目標Tに既知の運動を与える(たとえば、ターンテーブルに目標Tを乗せて回転させる)場合には、レーダの配置と目標Tに与えた運動とから容易に求めることができる。
【0023】
また、第2の処理方法として、レーダを航空機(図2参照)や衛星のような移動プラットフォームに搭載し、レーダから地表面上の固定位置の目標Tを観測するような場合にも、通常はプラットフォームに、プラットフォームの位置を計測するセンサ手段13(たとえば、加速度センサや、GPSなど)が搭載されているので(または、搭載可能なので)、既存のセンサ情報に基づいて相対運動を求めることができる。
【0024】
また、第3の処理方法として、目標Tは自由に運動するが、目標Tに搭載した運動センサ(図示せず)の情報を用いることが可能な場合には、目標Tからのセンサ情報を用いて相対位置および相対運動を推定することができる。
さらに、第4の処理方法として、運動センサの情報を用いることが不可能な目標Tにおいても、目標Tからの受信電波W2の到来方向から目標Tの方位、仰角および伝搬遅延差を定め、これらの方位情報から目標Tまでの距離を定め、この距離情報から3次元位置の時間変化を算出し、この3次元位置の時間変化に一般的な追尾処理を適用することにより、相対位置および相対運動を推定することができる。
【0025】
相対位置運動推定部10は、以上の処理方法により、または、相対位置および相対運動が完全には特定できない場合でも、その他の情報にしたがって相対位置および相対運動の候補を出力する。
このとき、相対位置運動推定部10からの相対運動および相対位置の出力情報の与え方としては、以下のように種々の形態が考えられる。
【0026】
たとえば、第1の形態として、目標Tが運動している場合には、レーダ位置を基準とした時刻t0における目標Tの重心の位置ベクトルrr_c、回転角速度ベクトルww、並進速度ベクトルvvという与え方が便利である。
また、第2の形態として、目標Tが静止していて、レーダが移動している場合には、目標Tの中心(以下、「目標中心」という)を基準とした時刻t0におけるレーダの位置ベクトルrr_c、並進速度ベクトルvvという与え方が便利である。
【0027】
ただし、上記第1および第2の相対運動および相対位置の表現の相違(すなわち、レーダが移動しているのか、目標Tが移動しているのかの相違)は、座標系の定義の相違のみによるものであり、簡単な座標変換で一方から他方へ容易に変換することができる。
以下、目標Tが固定していて、レーダが移動する座標系を用いた場合を例にとって説明するが、これは、レーダを固定した座標系や、レーダおよび目標Tの両者が移動する座標系を選択しても、式の表現が変わるのみであり、本質が変わることはない。
【0028】
目標形状推定部16内において、相対位置履歴算出部11は、相対位置運動推定部10から出力されるレーダと目標Tとの間の相対位置および相対運動を、目標Tに固定された座標系で表現する。
まず、目標T上に設定した原点を基準として、第h番目の観測をした際のレーダの位置ベクトルをrr_rad(h)(hは「ヒット」と称される)で表す。
【0029】
また、観測回数をHとし、ヒットhを1〜Hまで変化させた場合に得られる位置ベクトルrr_rad(h)を、目標Tの位置ベクトルの履歴と称する。
また、前述と同様に、以下において、「rr」、「ss」のように、最初に同じ文字を2回重ねて表現した変数は、ベクトルを表すものとする。
また、ベクトルは、特に説明がない場合には「列ベクトル」であるものとする。
【0030】
次に、画像投影面履歴算出部12は、目標上の3次元の反射強度分布を投影する仮想的な2次元平面(以下、「投影面」または「画像投影面」という)を定義する。
ここでは、H種類の観測データから適当な区分データ列を切出して、K種類のレーダ画像(以下、単に「画像」と略称する)を用いることを想定し、h番目の観測データ列をs(f、h)で表す。
【0031】
ただし、観測データ列s(f、h)内のfは周波数であり、周波数fの振り幅(すなわち、送信帯域幅)は、所望する距離分解能に基づいて設定される。
たとえば、レンジ分解能をΔrに設定するためには、送信帯域幅をC/(2Δr)程度に設定する必要がある。
また、短パルスの送受信やパルス圧縮を行うレーダにおいては、受信信号が伝搬遅延差(すなわち、時間に対する値)として得られることが多い。この場合、受信信号をフーリエ変換して、上記周波数分布の観測データ列s(f、h)に変換しておく。
【0032】
以下、第k番目の画像は、h_ks≦h≦h_keの範囲の観測データ列s(f、h)を用いて生成されるものとする。
第k番目の画像の生成においては、まず、目標中心の位置ベクトルss_ctr(k)を設定する。
なお、目標中心の位置ベクトルss_ctr(k)は、座標の原点にとってもよいし、これ以外にとってもよい。また、すべての変数kを通じて同じ値にしてもよいし、変えてもよい。
【0033】
各レーダ位置と上記目標中心とを結ぶ直線が同一平面上に乗っている場合(たとえば、目標位置を基準としたレーダの位置変化が直線で表される場合)などにおいては、その平面を画像投影面として選択すればよいが、上記直線が同一平面上に乗らない場合には、何らかの近似演算により、投影面を特定する必要がある。
ここでは、最小2乗法などの方法を用いて平面を特定するものとし、各レーダ位置から目標中心に向かうベクトルdd_ctr(k,h)は、以下の式(1)で与えられる。
【0034】
dd_ctr(k,h)=ss_ctr(k)−rr_rad(h)・・・(1)
【0035】
また、上記ベクトルdd_ctr(k,h)の長さをl_ctr(k,h)とすると、各レーダ位置から目標中心に向かう単位ベクトルii_ctr(k,h)は、以下の式(2)で与えられる。
【0036】
ii_ctr(k,h)=dd_ctr(k,h)/l_ctr(k,h)・・・(2)
【0037】
ここで、投影面の法線を与える単位ベクトルをII_z(k)とすると、単位ベクトルII_z(k)は、目標中心に向かう単位ベクトルii_ctr(h、k)との内積の2乗和を最小化する問題、すなわち、以下の式(3)の値A0を最小化する問題に帰着させて求めることができる。
【0038】
A0=transpose(II_z(k))A(k)transpose(A(k))II_z(k)・・・(3)
【0039】
ただし、式(3)において、A(k)は、以下の式(4)で与えられる行列である。
【0040】
A(k)=[rr_rad(h_ks)、rr_rad(h_ks+1)、・・・、rr_rad(h_ke−1)、rr_rad(h_ke)]・・・(4)
【0041】
また、transpose(X)を、ベクトルまたは行列Xの転置を得る演算として定義する。
なお、上記式(3)の最小化問題では、II_z(k)が単位ベクトルであることから、以下の式(5)による拘束条件が課せられる。
【0042】
1−transpose(II_z(k))II_z(k)=0・・・(5)
【0043】
ここでは、式(5)の拘束条件付の最適化問題をラグランジュの未定乗数法で解くことにする。
まず、以下の式(6)で表される行列B(k)を導入する。
【0044】
B(k)=A(k)transpose(A(k))・・・(6)
【0045】
ここで、行列B(k)は、対称行列となる。
次に、拘束条件付の評価関数B2(II_z(k))を、以下の式(7)で与える。
【0046】
B2(II_z(k))=transpose(II_z(k))B(k)II_z(k)+g(k)(1−transpose(II_z(k))II_z(k))・・・(7)
【0047】
ただし、式(7)において、g(k)は第k画像におけるラグランジュ乗数である。
ここで、上記評価関数B2が極値をとるためには、評価関数B2を単位ベクトルII_z(k)で微分した値がゼロとなること、すなわち、以下の式(8)を満足する必要がある。
【0048】
2B(k)II_z(k)−2g(k)II_z(k)=0・・・(8)
【0049】
式(8)は固有方程式であり、第k画像におけるラグランジュ乗数g(k)および単位ベクトルII_z(k)は、それぞれ、行列B(k)の固有値および固有ベクトルに対応する。
固有値をg_1(k)、g_2(k)、g_3(k)(ただし、g_1(k)≦g_2(k)≦g_3(k))とし、各固有値に対応する固有ベクトルをee_1(k)、ee_2(k)、ee_3(k)(いずれも単位ベクトル)とすると、これらを上記式(7)に代入することにより、以下の式(9)が得られる。
【0050】
B2(ee_a(k))=transpose(ee_a(k))g_a(k)ee_a(k)=g_a(k)・・・(9)
【0051】
ただし、式(9)において、a=1、2、3である。
式(9)のように、評価値が固有値になることから、単位ベクトルII_z(k)を最小固有値に対応する固有ベクトルee_1(k)と平行なベクトルとすると、単位ベクトルII_z(k)は、±ee_1(k)のいずれの符号のベクトルとしてもとり得る。
【0052】
なお、複数の画像を動画として表示する際には、各画像ごとに単位ベクトルII_z(k)の符号が反転すると、画像上の目標像も反転してしまうので、単位ベクトルII_z(k)を、以下の式(10)、式(10A)のように、前回の単位ベクトルII_z(k−1)の向きに近い方の符号をつけた単位ベクトルee_1(k)とすることもできる。
【0053】
II_z(k)=ee_1(k) ・・・(10)
II_z(k)=sgn(transpose(II_z(k−1))ee_1(k))ee_1(k)・・・(10A)
【0054】
ただし、式(10)は、k=1の場合の演算式を示し、式(10A)は、k≧2の場合の演算式を示す。
また、式(10A)において、sgn(X)は変数Xの符号を得るオペレータである。
画像中心を通り、かつ法線が単位ベクトルII_z(k)で与えられる平面が画像投影面となる。
【0055】
次に、画像投影面の平面上で直交する2軸を定義する。
まず、レーダから目標中心への方向に向かうレンジ軸方向の単位ベクトルII_x(k)を、単位ベクトルii_ctr(h)との内積の2乗和を最大化するベクトルとして得る。
ここでも、レンジ軸方向のベクトルII_x(k)が単位ベクトルであるという拘束条件があり、結果として、法線の単位ベクトルII_z(k)を得たときと同じ固有方程式に帰着させて解くことができる。
【0056】
この場合、レンジ軸方向の単位ベクトルII_x(k)は、最大固有値g_3(k)に対応する固有ベクトルee_3(k)に平行なベクトルとなる。
法線の単位ベクトルII_z(k)の場合も、同様に、符号の問題が発生し、このベクトルII_z(k)の符号も、正負どちらの値でも構わない。
ここでは、単位ベクトルii_ctr(h)と方向が近くなる方の符号を採用することにして、以降の説明を進める。そのために、以下の式(11)により、レンジ軸方向の単位ベクトルII_x(k)を得る。
【0057】
II_x(k)=sgn(mean(transpose(A(k))ee_3(k)))ee_3(k)・・・(11)
【0058】
ただし、式(11)において、mean(aa)は、配列(aa)の全要素の平均値を得るオペレータとして定義される。
最後に、法線の単位ベクトルII_z(k)と、レンジ軸方向の単位ベクトルII_x(k)との両者に直交する単位ベクトルII_y(k)を、以下の式(12)のように得る。
【0059】
II_y(k)=II_z(k)×II_x(k)・・・(12)
【0060】
ただし、式(12)において、「aa×bb」はベクトルaaとベクトルbbの外積演算を示す。
単位ベクトルII_y(k)のベクトル方向の軸を、以下では「クロスレンジ軸」と呼ぶ。
以上のように、画像投影面履歴算出部12は、式(1)〜(12)で得られた単位ベクトルII_x(k)、II_y(k)、II_z(k)を出力する。
【0061】
次に、レーダ画像再生部6は、画像投影面履歴(単位ベクトルII_x(k)、II_y(k)、II_z(k))に基づき、受信電波W2から画像を生成する。
ここでは、画像再生方法として、一般的なPFA(ポーラーフォーマットアルゴリズム)を想定して説明する。
PFAにおいては、画像を2次元フーリエ変換して得られる周波数平面上で、受信信号の周波数分布を、前述の投影面上での見込角に依存した角度ηに配置する。
【0062】
図4は目標T上の反射強度分布を時間領域で表示している。
図4において、原点は、前述の投影面上の画像中心である。
また、横軸t_xおよび縦軸t_yは、それぞれ、投影面上での単位ベクトルII_x(k)、II_y(k)方向の長さを、2/v_c倍(ただし、v_cは光速)して得られる時間である。
【0063】
また、目標中心に向かう単位ベクトルii_ctr(k,h)の方向を、レンジ軸方向の単位ベクトルII_x(k)からクロスレンジ軸方向の単位ベクトルII_y(k)に向かう方向を正とする角度ηで与えている。
角度ηをヒットhと変数kの関数η(k,h)とすると、関数η(k,h)は、以下の式(13)で表される。
【0064】
η(k,h)=atan((transpose(II_y(k))ii_ctr(h))/(transpose(II_x(k))ii_ctr(h)))・・・(13)
【0065】
ただし、式(13)において、atan(X)は、数値Xの逆正接を得るオペレータである。
【0066】
一方、図5は目標T上の反射強度分布を周波数領域で表示している。
図5において、横軸f_xおよび縦軸f_yは、それぞれ、時間t_x、t_yに対応する周波数を表しており、角度η(k,h)の方向から収集した受信信号の周波数分布は、f_x、f_yの周波数平面上でf_xからf_y方向に測った角度η方向の軸上で、周波数が原点からの距離となる位置に配置される。
【0067】
これにより、角度η(k,h)(目標とレーダの位置関係)を変えながら収集した受信信号の周波数分布は、上記手順にしたがって周波数平面上に配置して得られる扇状の受信信号分布に対し、図5内の点線に示すような矩形マトリクス状に並ぶサンプル点を設定して、各サンプル点における受信信号の値を補間することにより推定演算される。
【0068】
図5から得られた各サンプル点における受信信号の補間値を、周波数f_xおよびf_y方向に逆フーリエ変換することにより、図4のように、目標Tの反射強度分布の時間t_x、t_yを軸とする時間波形が得られる。
図4の時間波形の軸をそれぞれv_c/2倍することにより、目標T上の反射強度分布の空間分布が得られる。
【0069】
以上のように、レーダ画像再生部6は、図4および図5の処理により、各変数kにおける画像を得る。
なお、ここでは、レーダ画像再生部6による処理方法として、PFAを用いた場合について説明したが、PFAのみに限定される訳ではなく、たとえば、以下の(a)〜(d)に示す一般的方法を用いても、目的とする目標Tの反射強度の空間分布を表す画像を生成することができる。
【0070】
(a)レンジドップラーアルゴリズム+クロスレンジスケーリング、
(b)バックプロジェクションアルゴリズム、
(c)レンジマイグレーションアルゴリズム、
(d)チャープスケーリングアルゴリズム
【0071】
次に、画像履歴蓄積部7は、各変数kごとに得られた画像を蓄積する。
また、反射点抽出部8は、各画像において、閾値処理や探索処理に基づき複数の反射点を抽出する。
また、画像間反射点対応部9は、画像履歴蓄積部7に蓄積された後、各画像ごとに反射点抽出部8により抽出した反射点のエコーを、各画像間で照合し、各画像のどのエコーとどのエコーとが同じ反射点のエコーであるかの対応付けを取る。
【0072】
このとき、対応付けの取り方としては、以下のように種々の方法が考えられる。
たとえば、第1の対応付け方法として、隣接する第k番目と第k+1番目との画像間で、それぞれ抽出された各反射点のうち、距離の最も小さいもの同士を同じ反射点と考える方法が考えられる。
【0073】
また、第2の対応付け方法として、カルマンフィルタなどの理論に基づいて、たとえば1枚目〜k枚目の画像での対応結果に基づいて、k+1枚目の画像での反射点の発生位置を予測し、その予測値に近い位置の反射点と対応付ける方法が考えられる。
【0074】
また、第3の対応付け方法として、反射点の(複素)振幅値が近い反射点を対応付ける方法が考えられ、この場合は、第k番目の反射点における値のみを用いてもよく、また、第1番目〜第k番目の同じ反射点の像の振幅の平均値や2乗平均値を用いてもよい。
さらに、第4の対応付け方法として、抽出された反射点付近の区分画像を切り出したうえで、各画像で切り出した区分画像間の相関演算に基づいて、各画像間で類似する反射点の組を決定する方法も考えられる。
【0075】
以上のように、画像間反射点対応部9は、第1〜第4の方法を単体で、または組合せて使用することにより、画像間の反射点の対応付けを取る。
また、第k+1番目の画像において、第k番目の画像と対応付けられる点を決定するために、第k番目の画像における注目する像の位置に最も近いピークを探索する方法も考えられる。
【0076】
上記ピーク探索方法の場合、反射点抽出部8および画像間反射点対応部9は、まず、第1番目の画像において反射点を抽出する。
その後、画像間反射点対応部9は、2番目以降の画像において、上記のように1つ前の画像における抽出結果に近いピークを探索して抽出する。
【0077】
次に、反射点位置履歴推定部15は、第m反射点の画像上のピーク位置のxおよびy方向の画素番号に基づき、投影面上での、画像中心を基準としたx方向の位置x(k,m)と、画像中心を基準としたy方向の位置y(k,m)とを計算する。
【0078】
たとえば、折り返しを考慮した、原点との画素番号の差が、x方向に+Nx1、y方向に+Ny1で、かつ1画素あたりのx、y方向の距離分解能がそれぞれDx、Dyの場合について考える。
このとき、第m反射点のx方向の位置(画像中心基準)は+Nx1で与えられ、Dx、y方向の位置は+Ny1、Dyで与えられる。
【0079】
ここで、第m反射点の3次元の位置ベクトルss(m)は、第k画像に関連するパラメータを用いて、以下の式(14)のように表される。
【0080】
ss(m)=ss_ctr(k)+x(k,m)II_x(k)+y(k,m)II_y(k)+z(k,m)II_z(k)・・・(14)
【0081】
ただし、式(14)において、z(k,m)は、第k画像単体からは推定困難な、画像に直交する方向の反射点の座標である。
式(14)の両辺と、単位ベクトルII_x(k)およびII_y(k)との内積を算出すると、それぞれ以下の式(15)、式(16)が得られる。
【0082】
transpose(II_x(k))ss(m)=transpose(II_x(k))ss_ctr(k)+x(k,m)・・・(15)
transpose(II_y(k))ss(m)=transpose(II_y(k))ss_ctr(k)+y(k,m)・・・(16)
【0083】
ここで、以下の式(17)〜式(20)で表される行列Ax0、Ay0および行ベクトルbbx0(m)、bby0(m)を導入する。
【0084】
Ax0=[II_x(1)、II_x(2)、・・・、II_x(K)]・・・(17)
Ay0=[II_y(1)、II_y(2)、・・・、II_y(K)]・・・(18)
bbx0(m)=[transpose(II_x(1))ss_ctr(1)+x(1、m)、transpose(II_x(2))ss_ctr(2)+x(2、m)、・・・、transpose(II_x(K))ss_ctr(K)+x(K、m)]・・・(19)
bby0(m)=[transpose(II_y(1))ss_ctr(1)+y(1、m)、transpose(II_y(2))ss_ctr(2)+y(2、m)、・・・、transpose(II_y(K))ss_ctr(K)+y(K、m)]・・・(20)
【0085】
また、式(17)〜式(20)から、まず、xに関する行列Ax0および行ベクトルbbx0(m)を用いて、以下の式(21)、(22)の行列A(m)および列ベクトルbb(m)を生成するものとする。
【0086】
A(m)=transpose(Ax0) ・・・(21)
bb(m)=transpose(bbx0(m))・・・(22)
【0087】
したがって、式(21)、式(22)を、k=1、・・・、Kまで合わせることにより、以下の式(23)のような関係が得られる。
【0088】
A(m)ss(m)=bb(m)・・・(23)
【0089】
この場合、以下の式(24)で与えられるAの一般化逆行列A_invを用いることにより、以下の式(25)のように、最小2乗法に基づいて、第m反射点の3次元の位置ベクトルss(m)を推定することができる。
【0090】
A_inv(m)=inv(transpose(A(m))A(m))transpose(A(m))・・・(24)
ss(m)=A_inv(m)bb(m)・・・(25)
【0091】
ただし、式(24)、式(25)において、inv(X)は正方行列Xの逆行列を得るオペレータである。
同様に、yに関する行列およびベクトルを用いて、以下の式(26)、式(27)のようにA(m)およびbb(m)を生成しても、上記式(24)〜(25)を用いて、位置ベクトルss(m)を推定することができる。
【0092】
A(m)=transpose(Ay0)・・・(26)
bb(m)=transpose(bby0(m))・・・(27)
【0093】
また、xおよびyに関する行列およびベクトルの両者を用いて、以下の式(28)、式(29)のようにAおよびbb(m)を生成しても、上記式(24)〜(25)を用いて、位置ベクトルss(m)を推定することができる。
【0094】
A(m)=transpose([Ax0、Ay0])・・・(28)
bb(m)=transpose([bbx0(m)、bby0(m)])・・・(29)
【0095】
さらに、xおよびyに関する行列およびベクトルから、適当に選択した変数kの配列(たとえば、k=ka、kb、kc、・・・)に関する、xまたはyから、または、xおよびyの両者から、部分的な行列および列ベクトルを切り出して得られる部分的な行列およびベクトルの組を、前述と同様に、A(m)、bb(m)と置くことによっても、位置ベクトルss(m)を推定することができる。
【0096】
変数kの部分配列の設定方法の指標としては、種々考えられるが、注目する反射点(たとえば、第m反射点)として対応する点が存在しない画像を省いた配列や、対応する反射点の評価値が低い画像(たとえば、発生予測位置との距離が遠い反射点が選択された画像)の配列などの利用が考えられる。
【0097】
このことを踏まえて、反射点位置履歴推定部15は、画像中心を基準としたx、y方向の位置x(k,m)およびy(k,m)に加えて、出力データの信頼度wgt(k,m)(たとえば、0≦wgt(k,m)≦1で、「1」に近づくにつれて信頼度が増大)を出力するように構成されているものとする。
【0098】
また、すべての出力データに信頼度の差をつけない場合には、wgt(k,m)に同じ値(たとえば、「1」)を入れて出力すればよい。
また、各画像で目標中心の位置ベクトルss_ctr(m)を等しい値ss_ctrとする場合には、上記式(19)、(20)は、以下の式(30)、式(31)のように簡単化することができる。
【0099】
bbx0(m)=[x(1、m)、x(2、m)、・・・、x(K、m)]・・・(30)
bby0(m)=[y(1、m)、y(2、m)、・・・、y(K、m)]・・・(31)
【0100】
また、この場合、上記式(25)は、以下の式(32)に変形される。
【0101】
ss(m)=A_inv(m)bb(m)+ss_ctr・・・(32)
【0102】
ただし、相対的な位置関係のみが分かればよい場合には、目標中心の位置ベクトルは不要になる。
この場合、式の表現上では、上記式(25)をそのまま用いることができる。
以上のように、レーダ画像再生部6、画像履歴蓄積部7、反射点抽出部8、画像間反射点対応部9および反射点位置履歴推定部15により、反射点位置履歴が所得される。
【0103】
次に、目標形状算出部14による目標形状の推定処理動作について説明する。
まず、目標形状算出部14は、画像投影面履歴算出部12からの出力情報(画像投影面履歴)に基づいて、行列Ax0、Ay0を生成する。
また、目標形状算出部14は、画像投影面履歴算出部12の出力情報(画像投影面履歴)と、反射点位置履歴推定部15からの出力情報(反射点位置履歴)とに基づき、行ベクトルbbx0(m)、bby0(m)を生成する。
【0104】
次に、目標形状算出部14は、行列Ax0、Ay0と、行ベクトルbbx0(m)、bby0(m)とに基づき、上述したような各種方法のいずれか、または各種方法の組合せを用いて、行列A(m)および列ベクトルbb(m)を生成し、最終的には、上記式(24)〜(25)に基づいて、各反射点mの位置ベクトルss(m)を推定する。
【0105】
目標形状算出部14は、上記推定処理を各反射点について繰り返し実行することにより、目標T上の各反射点の位置ベクトルssを推定する。このとき、各反射点の位置ベクトルssの集合を目標Tの3次元形状と呼ぶ。
また、目標Tの種類を特定するためには、目標T上の各反射点の反射強度そのものの値も重要な情報となる。そこで、上記各反射点の位置ベクトルssに加えて、各画像(言い換えると、各観測方向付近)での各反射点の反射強度の値Amp(k,m)を出力してもよい。
【0106】
以上のように、この発明の実施の形態1によれば、目標Tに対して送信電波W1を照射する電波照射手段4と、送信電波W1が目標Tで反射されて戻ってくる受信電波W2を受信する受信機5と、受信電波W2に基づき目標T上の反射点の3次元分布を所定の投影面に投影した画像を生成するレーダ画像再生部6と、画像上で反射点の像と考えられる反射点像を抽出する反射点抽出部8と、複数の画像のそれぞれに対して抽出された反射点像の対応付けを取る画像間反射点対応部9と、複数の画像の間で対応付けの取れた反射点の、各画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部15と、レーダ画像再生部6で再生される画像の投影面を特定するレンジ軸およびレンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部12と、レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、レンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定する目標形状算出部14とを備え、目標T上の各反射点につき、目標Tとレーダとの間の相対位置および運動で定まる仮想的な平面に投影した場合の、レンジおよびクロスレンジの値を算出する処理を、複数の画像で繰り返し実行し、これらのレンジおよびクロスレンジの値を用いて、最小2乗法に基づき3次元形状を推定するようにしたので、高精度の推定を実現することができる。
【0107】
また、目標Tとの間の相対位置および相対運動に関する検出情報を生成するセンサ手段13と、検出情報、既知の位置および運動の変化情報、または、目標Tの観測結果に基づく追尾処理に基づいて、目標Tとの間の相対位置および相対運動の変化を相対位置運動推定結果として特定または推定する相対位置運動推定部10と、相対位置運動推定結果に基づいて、目標Tとの相対位置の変化を特定する相対位置履歴算出部11とを備え、画像投影面履歴算出部は、相対位置履歴算出部により得られた目標との相対位置の変化に基づいて、レンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定するように構成し、目標Tとレーダとの間の相対位置および相対運動の変化推定方法を明確化しているので、上記3次元形状の推定を確実に実現することができる。
【0108】
また、画像投影面履歴算出部12は、レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、各画像を生成するデータとを得るために目標Tの位置関係を変えながら観測する際に、各レーダ位置を始点とした目標T上の目標中心までの距離と、各レーダ位置を基準とした目標中心の方向の単位ベクトルとレンジ軸ベクトルおよびクロスレンジ軸ベクトルとの内積値とに基づいて、レーダ位置を基準とした目標方向の単位ベクトルと投影面に投影した方向のレンジ軸からの角度ηを取得し、レーダ画像再生部6は、レンジ軸ベクトル、クロスレンジ軸ベクトルおよび角度レーダを基準とした目標方向の単位ベクトルと投影面に投影した方向のレンジ軸からの角度ηおよび目標Tまでの距離に基づいて、レンジ軸およびクロスレンジ軸を2軸とする画像を生成するようにしたので、高精度の推定を実現することができる。
【0109】
また、画像投影面履歴算出部12は、各画像を生成するデータを得るために目標Tとの位置関係を変えながら観測する際に、各レーダ位置を始点とした目標中心までの距離と、各レーダ位置を基準とした目標T上の目標中心方向の各単位ベクトルに基づいて、ラグランジュ乗数法により、長さが「1」という制約条件の下に、各単位ベクトルとの内積値の2乗平均値が最小となる単位ベクトルを決定し、内積値の2乗平均値が最小となる単位ベクトルを投影面の法線ベクトルとし、また、長さが「1」という制約条件の下で、各単位ベクトルとの内積値が最大となる単位ベクトルを決定し、内積値が最大となる単位ベクトルをレンジ軸ベクトルとし、法線ベクトルとレンジ軸ベクトルとの外積演算に基づいてクロスレンジ軸ベクトルを算出する。
また、画像間反射点対応部9は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、反射点抽出部で抽出された各反射点像を対応付ける際に、各画像の間で抽出された各反射点像の間の距離を算出し、各反射点像の間の距離が最小となる組合せを選択する。
【0110】
これにより、画像の投影面の法線を、レーダと目標Tとの相対位置を変えながら画像再生用のデータを収集する際の、それぞれの位置関係におけるレーダから目標Tに向かう単位ベクトルとの内積の2乗平均値が最小となるように選択するので、再生画像の歪みを低減して3次元形状の推定精度を向上させることができる。
また、隣接するフレームの画像間で、レンジ軸ベクトルを、それぞれの位置関係におけるレーダから目標Tに向う単位ベクトルとの内積の2乗平均値が最大となる方向に選択し、かつレンジ軸ベクトルの符号を、レンジ軸ベクトルとレーダから目標Tに向う各単位ベクトルとの内積の平均値の符号が負とならないように選択するので、隣接するフレーム間で急に画像が反転するような状態を回避することができる。
また、それぞれの画像におけるレンジ軸ベクトルまたはクロスレンジ軸ベクトルから行列を生成し、また、各画像における各反射点のレンジまたはクロスレンジから列ベクトルを生成し、上記行列の一般化逆行列と列ベクトルとを用いて、最小2乗法により形状を推定するので、推定精度を向上させることができる。
また、この際、反射点の対応付けの信頼度に基づいて、信頼度の高いデータを用いて形状を推定することにより、信頼度の低いデータを用いる場合よりもさらに推定精度を向上させることができる。
【0111】
また、画像投影面履歴算出部12は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、レンジ軸またはクロスレンジ軸の方向が急に反転することを防ぐために、第k+1番目の画像の投影面の法線方向の単位ベクトルの符号を、第k番目の画像の投影面の法線ベクトルとの内積値が正となるように選択し、かつ、レンジ軸ベクトルの方向が、各レーダ位置を基準とした目標方向の単位ベクトルと一致するように、レンジ軸ベクトルの符号を、各レーダ位置を基準とした目標方向の単位ベクトルとの内積値の平均値が正になるように選択する。
【0112】
これにより、隣接するフレームの画像間で画像投影面の法線方向の単位ベクトルの内積の符号を正にするように、各ベクトルの符号を設定するので、隣接するフレーム間で急に画像が反転するような状態を回避することができる。
また、隣接するフレームの画像間で、レンジ軸ベクトルを、それぞれの位置関係におけるレーダから目標Tに向う単位ベクトルとの内積の2乗平均値が最大となる方向に選択し、かつレンジ軸ベクトルの符号を、レンジ軸ベクトルとレーダから目標Tに向う各単位ベクトルとの内積の平均値の符号が負とならないように選択するので、隣接するフレーム間で急に画像が反転するような状態を回避することができる。
【0113】
また、画像間反射点対応部9は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、反射点抽出部8で抽出された各反射点像を対応付ける際に、第k番目までの画像上の同じ反射点像と考えられる抽出結果の位置に基づいて、カルマンフィルタ理論を用いて第k+1番目の画像における反射点像の出現位置を予測し、反射点像の予測位置に最も近い反射点像を第k+1番目の反射点像とする。
これにより、画像の隣接するフレーム間で、どの反射点とどの反射点とが対応するかを、各画像の間での反射点間の距離や、カルマンフィルタ理論に基づく予測位置との距離、各反射点の振幅値などに基づいて特定するので、対応付け精度が向上し、この結果、目標Tの3次元形状の推定精度を向上させることができる。
【0114】
また、目標形状算出部14は、注目する反射点についてのK行1列、2K行1列またはK’行1列の列ベクトルの各要素のうち、各画像におけるレンジの値の代わりに、レンジの値に目標中心のレンジを加えた値を設定するとともに、各画像におけるクロスレンジの値の代わりに、クロスレンジの値に目標中心のクロスレンジを加えた値を設定する。
また、反射点位置履歴推定部15は、各反射点の各画像間の対応付け結果に基づいて、隣接する画像における同じ反射点との距離が大きい画像、または、反射点の存在しない画像の信頼度の重みを小さく設定し、同じ反射点との距離が小さい画像の信頼度の重みを大きく設定し、目標形状算出部14は、信頼度の重みに閾値を設定して、信頼度の重みが閾値を越えたK’枚の画像についてのみ、レンジ軸ベクトルまたはクロスレンジ軸ベクトルを用いて一般化逆行列を生成し、選択された画像についてのみ、レンジまたはクロスレンジの値を用いてK’行1列の列ベクトルを生成し、一般化逆行列およびK’行1列の列ベクトルに基づいて反射点の位置ベクトルを推定する処理を各反射点ごとに繰り返し実行して、各反射点の位置ベクトルを推定する。
これにより、目標Tの3次元形状を推定する際に、各画像ごとに、目標中心の位置ベクトルを考慮してレンジおよびクロスレンジの値を補正するので、各画像ごとに目標中心の位置ベクトルの設定値を変化させても、高精度に3次元形状を推定することができる。
【0115】
また、目標形状算出部は14、推定された目標Tの3次元形状(目標T上の各反射点の3次元位置)に加えて、各反射点の反射強度値を出力するので、目標Tの識別に用いる情報量を増やすことができ、識別性能をさらに向上させることができる。
【0116】
また、画像間反射点対応部9は、フレーム番号が連続する第k番目の画像と第k+1番目の画像との間で、反射点抽出部8で抽出された各反射点像を対応付ける際に、第k番目の画像上の反射点の振幅または振幅分布、または、第k番目までの画像における同じ反射点の振幅値の平均値に近い反射点像を第k+1番目の画像上で抽出された反射点像から探索して対応付けするので、高精度の推定を実現することができる。
【0117】
また、目標形状算出部14は、画像投影面履歴算出部12で得られたK枚の画像における各レンジ軸ベクトルを3行1列の列ベクトルと見なし、列ベクトルをK列合わせて3行K列の行列を生成するとともに、行列を転置した行列Aを生成し、反射点位置履歴推定部15で得られた各反射点のK枚の画像におけるレンジを構成要素としたK行1列の列ベクトルを生成し、行列Aの一般化逆行列とK行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、各反射点の位置ベクトルを推定して出力するので、高精度の推定を実現することができる。
【0118】
また、目標形状算出部14は、画像投影面履歴算出部12で得られたK枚の画像における各クロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、列ベクトルをK列合わせて3行K列の行列を生成するとともに、行列を転置した行列Aを生成し、反射点位置履歴推定部15で得られた各反射点のK枚の画像におけるクロスレンジを構成要素としたK行1列の列ベクトルを生成し、行列Aの一般化逆行列とK行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、各反射点の位置ベクトルを推定するので、高精度の推定を実現することができる。
【0119】
また、目標形状算出部14は、画像投影面履歴算出部12で得られたK枚の画像における各レンジ軸ベクトルおよびクロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、列ベクトルをK列合わせて3行2K列の行列を生成するとともに、行列を転置した行列Aを生成し、反射点位置履歴推定部15で得られた各反射点のK枚の画像におけるレンジおよびクロスレンジを構成要素とした2K行1列の列ベクトルを生成し、行列Aの一般化逆行列と2K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、各反射点の位置ベクトルを推定するので、高精度の推定を実現することができる。
【0120】
実施の形態2.
なお、上記実施の形態1(図1)では、目標形状算出部14の算出結果を目標形状推定結果としたが、図6のように、目標形状逐次推定部19に関連した次フレーム反射点位置予測部18を設け、次フレーム反射点位置予測部18を介して目標形状推定結果を出力してもよい。
図6はこの発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。
【0121】
図6において、前述(図1参照)と同様のものについては、前述と同一符号が付されている。
また、目標形状逐次推定部19は、前述の目標形状推定部16に対応し、目標形状逐次推定部19内の逐次形状考慮反射点対応部17は、前述の画像間反射点対応部9に対応している。
この場合、図1内の画像間反射点対応部9は、図6内の逐次形状考慮反射点対応部17として機能する。
【0122】
画像投影面履歴算出部12および目標形状算出部14には、次フレーム反射点位置予測部18が接続され、次フレーム反射点位置予測部18は、逐次形状考慮反射点対応部17に接続されている。
次フレーム反射点位置予測部18は、画像投影面履歴算出部12からの画像投影面履歴と、目標形状算出部14の算出結果とに基づいて、目標形状推定結果を出力する。
また、次フレーム反射点位置予測部18からの目標形状推定結果は、目標形状逐次推定部19内の逐次形状考慮反射点対応部17にフィードバックされる。
【0123】
具体的には、次フレーム反射点位置予測部18は、フレーム番号が連続する第k番目の画像までのデータを用いて目標形状算出部6で得られた目標形状と、画像投影面履歴算出部12で得られた第k+1番目のレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、第k+1番目の画像における目標中心の位置ベクトルとに基づいて、第k+1番目の画像における各反射点のレンジとクロスレンジを推定する。
【0124】
また、逐次形状考慮反射点対応部17は、次フレーム反射点位置予測部18で得られた第k+1番目の画像における各反射点のレンジとクロスレンジの推定結果を、レーダ画像再生部6で生成されかつ画像履歴蓄積部7で蓄積された第k+1番目の画像について、反射点抽出部8で抽出された各反射点像のレンジおよびクロスレンジと比較し、両者が最も近い各反射点を対応付ける。
反射点位置履歴推定部15は、逐次形状考慮反射点対応部17による対応付け結果に基づいて、各反射点ごとのレンジおよびクロスレンジの履歴を算出する。
【0125】
次に、図6に示したこの発明の実施の形態2に係る画像レーダ装置の処理動作について説明する。
前述の実施の形態1では、生成したすべての画像から抽出した反射点を対応付けた後に目標Tの形状を推定したが、各画像間の反射点の対応付けは、一般に、反射点の数が多くなるにつれて困難になると考えられる。
【0126】
そこで、この発明の実施の形態2による次フレーム反射点位置予測部18は、第k番目の画像までを用いて推定した各反射点の3次元位置の推定結果に基づいて、第k+1番目(次フレーム)の画像上での各反射点の位置を予測し、k+1番目の各反射点の予測位置に近い位置に存在する反射点と対応付けする。
以下、この対応付け処理を、変数kの値を増やしながら繰り返し実行することにより、対応付け精度を向上させ、結果として、目標Tの3次元形状の推定精度を向上させることができる。
【0127】
目標形状逐次推定部19は、まず、事前に設定した値kまでのデータを用いて、前述と同様に目標Tの3次元形状を推定する。
このとき、目標形状逐次推定部19内の逐次形状考慮反射点対応部17は、前述(図1参照)の画像間反射点対応部9と同一の動作をする。
【0128】
こうして、第k番目の画像までを用いて推定した第m反射点の位置ベクトルをss_est(k,m)とする。
これに基づき、次フレーム反射点位置予測部18は、第k+1番目の画像におけるm番目の反射点の、第k+1投影面上での、画像中心を基準としたx座標とy座標の予測値x_est(k+1、m)およびy_est(k+1、m)を、以下の式(33)、式(34)のように算出する。
【0129】
x_est(k+1、m)=II_x(k+1)(ss_est(k,m)−ss_ctr(k+1))・・・(33)
y_est(k+1、m)=II_y(k+1)(ss_est(k,m)−ss_ctr(k+1))・・・(34)
【0130】
逐次形状考慮反射点対応部17では、反射点抽出部8で抽出された第k+1番目の画像上の反射点と次フレーム反射点位置予測部18で得られた各反射点の第k+1番目の画像上の位置の予測値を比較し、予測値と近い位置に発生した点との対応を取る。
以下、この処理を、変数kの値を増やしながら繰り返し実行する。
【0131】
以上のように、この発明の実施の形態2によれば、レーダ画像再生部6から生成された複数のレーダ画像を画像履歴として蓄積する画像履歴蓄積部7と、フレーム番号が連続する第k番目のレーダ画像までのデータを用いて目標形状算出部14で得られた目標形状と、画像投影面履歴算出部12で得られた第k+1番目のレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、第k+1番目のレーダ画像における目標中心の位置ベクトルとに基づいて、第k+1番目のレーダ画像における各反射点のレンジとクロスレンジを推定する次フレーム反射点位置予測部18と、次フレーム反射点位置予測部18で得られた第k+1番目のレーダ画像における各反射点のレンジとクロスレンジの推定結果を、レーダ画像再生部6で生成されかつ画像履歴蓄積部7で蓄積された第k+1番目のレーダ画像について反射点抽出部8で抽出された各反射点像のレンジおよびクロスレンジと比較し、両者が最も近い各反射点を対応付ける逐次形状考慮反射点対応部17とを備え、反射点位置履歴推定部15は、逐次形状考慮反射点対応部17による対応付け結果に基づいて、各反射点ごとのレンジおよびクロスレンジの履歴を算出することにより、対応付けの精度を向上させて、3次元形状の推定精度を向上させることができる。
【0132】
実施の形態3.
なお、上記実施の形態2(図6)では、目標形状逐次推定部19に関連した次フレーム反射点位置予測部18を設けたが、図7のように、前処理目標形状推定部20に関連した区分フレーム列内推定形状蓄積部22、区分フレーム列内推定形状対応部23、反射点位置履歴統合部24および統合形状算出部25を設け、統合形状算出部25から目標形状推定結果を出力してもよい。
【0133】
図7はこの発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。
図7において、前述(図1、図6参照)と同様のものについては、前述と同一符号が付されている。
また、前処理目標形状推定部20は、前述(図1)の目標形状推定部16に対応し、前処理目標形状推定部20内において、区分フレーム列内反射点対応部21、区分フレーム列内目標形状算出部26および区分フレーム反射点位置履歴推定部27は、それぞれ、前述の画像間反射点対応部9、目標形状算出部14および反射点位置履歴推定部15に対応する。
【0134】
この場合、図1内の画像間反射点対応部9は、図7内の区分フレーム列内反射点対応部21として機能し、図1内の目標形状算出部14は、図7内の区分フレーム列内目標形状算出部26として機能し、図1内の反射点位置履歴推定部15は、図7内の区分フレーム反射点位置履歴推定部27として機能する。
【0135】
区分フレーム列内目標形状算出部26には、区分フレーム列内推定形状蓄積部22が接続され、区分フレーム列内推定形状蓄積部22には、区分フレーム列間推定形状対応部23が接続されている。
区分フレーム反射点位置履歴推定部27および区分フレーム列間推定形状対応部23には、反射点位置履歴統合部24が接続されている。
また、画像投影面履歴算出部12および反射点位置履歴統合部24には、統合形状算出部25が接続されている。
【0136】
前処理目標形状推定部20内の画像履歴蓄積部7は、前述と同様に、レーダ画像再生部6から生成されたレーダ画像の履歴を蓄積する。
区分フレーム列内反射点対応部21は、反射点抽出部8で得られた各レーダ画像における反射点の抽出結果の対応付けを検討して、レーダ画像のフレーム列を複数の区分フレーム列に分離し、各区分フレーム列ごとに反射点間の対応付けを取る。
【0137】
区分フレーム反射点位置履歴推定部27は、区分フレーム列内反射点対応部21による対応付け結果に基づいて、各区分フレームごとに反射点のレンジおよびクロスレンジの履歴を算出する。
区分フレーム列内目標形状算出部26は、画像投影面履歴算出部12の算出結果および区分フレーム反射点位置履歴推定部27の推定結果に基づいて、各区分フレームごとに各反射点の3次元の位置ベクトルを推定する。
【0138】
区分フレーム列内推定形状蓄積部22は、区分フレーム列内目標形状算出部26により各区分フレームごとに得られた各反射点の3次元の位置ベクトルを蓄積する。
区分フレーム列間推定形状対応部23は、区分フレーム列内推定形状蓄積部22内の蓄積データを読出し、各区分フレーム列ごとに各反射点について得られた3次元の位置ベクトルを比較し、各反射点間の距離が小さい反射点同士を同じ反射点と見なす。
【0139】
反射点位置履歴統合部24は、区分フレーム列間推定形状対応部23により同じ反射点と見なされた反射点について、区分フレーム反射点位置履歴推定部27で得られた各反射点の画像上のレンジおよびクロスレンジの履歴を統合する。
統合形状算出部25は、反射点位置履歴統合部で統合された各反射点のレンジおよびクロスレンジ位置と、画像投影面履歴算出部で得られたレンジ軸ベクトルおよびクロスレンジ軸ベクトルに基づいて、前述の目標形状算出部14(図6参照)と同様に、各反射点の3次元位置を推定して目標形状推定結果を出力する。
【0140】
次に、図7に示したこの発明の実施の形態3に係る画像レーダ装置の処理動作について説明する。
前述の実施の形態2では、第k番目までの画像を用いて各反射点の3次元位置を推定し、この推定結果を用いて第k+1番目の画像における各反射点の発生位置を予測し、この予測位置と発生位置の情報とに基づいて第k+1番目の反射点を対応付けた。しかし、異なる位置に存在し、かつ投影面上でのx座標とy座標が偶然一致するような複数の反射点が存在する場合には、これらの反射点を分離することができず、対応付けも困難になる可能性がある。
【0141】
ところが、上記のように投影面上でのx座標とy座標が偶然一致するような反射点であっても、3次元空間内で比較することができれば、比較結果の情報に基づいて上記反射点を分離して対応付けを取ることができるので、誤った対応付けを低減させることが可能なことが分かる。
【0142】
このような考え方に基づき、この発明の実施の形態3では、全画像を各反射点ごとに、または全反射点につき、対応付けが容易な複数の区分フレームに分離し、各区分フレームごとに得られた3次元形状を推定する。
したがって、この発明の実施の形態3においては、各区分フレームで得られた3次元形状を3次元空間内で比較して対応付けすることで、2次元画像のみを用いた対応付けが困難なことに起因した対応付けの失敗を低減することを目的としている。
【0143】
図7に示す前処理目標形状推定部20において、まず、区分フレーム列内反射点対応部21は、反射点抽出部8で得られた各画像間の反射点の対応付けを検討し、画像のフレーム列を、高精度な反射点間の対応付けが可能であると期待できる区分フレーム列に分離したうえで、各区分フレーム列ごとに、そのフレーム列内での反射点の対応付けを行う。
【0144】
続いて、区分フレーム反射点位置履歴推定部27は、各区分フレームごとに対応の取られた各反射点の位置の履歴を算出し、区分フレーム列内目標形状算出部26は、その区分フレーム列内データのみを用いて目標形状を推定する。
前処理目標形状推定部20は、上記処理を区分フレーム列を変えながら繰り返し、これを区分フレーム列内推定形状蓄積部22に蓄積する。
【0145】
次に、区分フレーム列間推定形状対応部23は、各区分フレーム列内で推定された各反射点の3次元位置を比較して対応付けを取る。
また、反射点位置履歴統合部24は、区分フレーム列間推定形状対応部23での対応付けの結果に基づいて、区分フレーム反射点位置履歴推定部27に蓄積された投影面上での各反射点の位置の履歴を統合する。
【0146】
最後に、統合形状算出部25は、反射点位置履歴統合部24で対応の取られた各反射点の各投影面での位置履歴と、画像投影面履歴算出部24で得られた画像投影面の履歴とに基づいて、前述の目標形状算出部14と同様の処理により、各反射点の3次元位置を推定し、最終的な目標形状推定結果として出力する。
【0147】
上述したように、この発明の実施の形態3によれば、3次元空間内で反射点間の対応を取ることにより、2次元画像のみを用いて対応付けを行う場合に比較して、対応付けの失敗を低減することができ、結果として、3次元形状の推定精度を向上させることができる。
【0148】
なお、一般に、対応付けが困難になるフレームは、各反射点ごとに異なると推測されるので、区分フレーム列内反射点対応部21からの画像を区分フレームに分割する処理は、必ずしも、全反射点で同時に対応付けが容易な区分フレームに分離する必要がなく、もっと条件を緩めて、各反射点ごとに、区分フレームの区切り方を変えても適用できることは言うまでもない。
【0149】
実施の形態4.
なお、上記実施の形態1(図1)では、目標形状算出部14の算出結果を目標形状推定結果としたが、図8のように、画像投影面推定誤差考慮目標形状算出部29の算出結果を目標形状推定結果としてもよい。
図8はこの発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。
図8において、前述(図1参照)と同様のものについては、前述と同一符号が付されている。
また、画像投影面推定誤差考慮目標形状推定部30は、前述の目標形状推定部16に対応し、画像投影面推定誤差考慮目標形状推定部30内の誤差比率推定部28および画像投影面推定誤差考慮目標形状算出部29は前述の目標形状算出部14に対応している。
【0150】
この場合、画像投影面履歴算出部12および反射点位置履歴推定部15には、それぞれ、誤差比率推定部28および画像投影面推定誤差考慮目標形状算出部29が接続され、誤差比率推定部28には、画像投影面推定誤差考慮目標形状算出部29が接続されている。
誤差比率推定部28は、画像投影面履歴算出部12からの画像投影面履歴と、反射点位置履歴推定部15からの反射点位置履歴とに基づいて、画像投影面履歴および反射点位置履歴に含まれる推定誤差量の誤差比率を算出する。
すなわち、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値に含まれる誤差と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に含まれる推定誤差の大きさとの誤差比率を算出して、画像投影面推定誤差考慮目標形状算出部29に入力する。
【0151】
また、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部28により推定された誤差比率の値を用い、画像投影面の推定値に含まれる誤差を考慮しながら、目標T上の各反射点の3次元位置を推定する。すなわち、画像投影面推定誤差考慮目標形状算出部29は、画像投影面履歴算出部12からのレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、反射点位置履歴推定部15からのレンジ軸方向およびクロスレンジ軸方向の各位置と、誤差比率推定部28により推定された誤差比率とに基づいて、各反射点の3次元位置を推定し、目標形状推定結果として生成する。
【0152】
たとえば、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、特異値分解処理の結果として得られる特異値分布から定義されるエントロピー量を用い、エントロピー量を最大とする定数を誤差比率の推定値として出力する。
【0153】
または、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、特異値分解処理の結果として得られる特異値分布から定義される非等方性度を用い、非等方性度を最小とする定数を誤差比率の推定値として出力する。
【0154】
また、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部により推定された誤差比率の推定値をスケーリング係数として利用しながら、たとえばスケールド・トータル・リースト・スクエア(Scaled Total Least Square)法によって各反射点の3次元位置を推定する。
【0155】
前述の実施の形態1においては、目標形状算出部14は、式(24)、式(25)を用いて、最小2乗法によって各反射点の3次元位置を推定し、目標形状推定結果として生成しており、行列A(m)には誤差が含まれていないことを前提としている。しかし、行列A(m)の各行は、画像投影面履歴算出部12により算出された画像投影面のレンジ軸ベクトルおよびクロスレンジ軸ベクトルの推定値であり、推定誤差(以下、「画像投影面推定誤差」という)を含み得る値である。
【0156】
一方、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値にも、推定誤差(以下、「反射点位置推定誤差」という)が含まれる。
画像投影面推定誤差が反射点位置推定誤差に比べて十分に小さい場合は、前述の実施の形態1のように、式(24)、式(25)を用いて各反射点の3次元位置を推定することが可能であるが、画像投影面推定誤差が大きい場合には、目標形状推定結果に含まれる誤差が極めて大きくなる問題がある。
【0157】
そこで、図8において、誤差比率推定部28は、画像投影面推定誤差の大きさと、反射点位置推定誤差の大きさとの比率を算出し、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部28によって算出された誤差の大きさの比率に基づき、たとえばScaled Total Least Square法によって各反射点の3次元位置を推定し、目標形状推定結果を生成する。
これにより、画像投影面推定誤差が大きい場合における目標Tの3次元形状の推定精度を向上させることができる。
【0158】
一般に、Ax=B(A、B、xは行列)という線形システムにおいて、行列Aの観測値と行列Bの観測値とから行列xを推定する問題を考えた場合、行列Aおよび行列Bの観測値には誤差が含まれるという前提で、最適な行列xを推定する1つの方法が、Scaled Total Least Square法と呼ばれる方式である。
【0159】
Scaled Total Least Square法は、行列Aおよび行列Bの観測値には誤差が含まれると仮定しながら、その誤差の2乗平均を最小化するように、行列xを算出するという考え方に基づく方式である。
換言すると、Scaled Total Least Square法は、(A+E)xγ=Bγ―Gを満足する条件の下で、行列[E G]のフロビニウス・ノルム(Frobenius norm)を最小化する行列xを算出する方式である。ここで、γは、行列Aの観測値に含まれる誤差の標準偏差と、行列Bの観測値に含まれる誤差の標準偏差との誤差比率に対応した正の定数(以下、「スケーリング係数」という)である。
Scaled Total Least Square法の問題点は、スケーリング係数γが未知の場合に適用できないことである。
【0160】
そこで、この発明の実施の形態4においては、図8のように、画像投影面推定誤差考慮目標形状算出部29によるScaled Total Least Square法を用いた各反射点の3次元位置推定処理の前に、誤差比率推定部28により、スケーリング係数γを誤差比率として推定する構成を採用している。
【0161】
次に、図8に示したこの発明の実施の形態4に係る画像レーダ装置の処理動作について説明する。
まず、誤差比率推定部28は、画像投影面履歴算出部12からの出力情報(画像投影面履歴)に基づいて、行列Ax0、Ay0を生成する。また、目標形状算出部14は、画像投影面履歴算出部12の出力情報(画像投影面履歴)と、反射点位置履歴推定部15からの出力情報(反射点位置履歴)とに基づき、前述の式(29)のように、列ベクトルbb(m)を生成する。
次に、誤差比率推定部28は、行列Ax0、Ay0と、列ベクトルbb(m)、bb(m)とに基づき、以下の式(35)、式(36)のように、行列A、Bを生成する。行列Aは、行数「2K」、列数「3」の行列からなり、行列Bは、行数「2K」、列数「M」の行列からなる。
【0162】
A=transpose([Ax0、Ay0])・・・(35)
B=[bb(1)、bb(2)、・・・、bb(M)])・・・(36)
【0163】
次に、誤差比率推定部28は、スケーリング係数γを用いて、以下の式(37)のように、行列C(γ)を生成する。行列C(γ)は、行数「2K」、列数「3+M」の行列からなる。
【0164】
C(γ)=[A、γB]・・・(37)
【0165】
なお、式(37)で用いられるスケーリング係数γの値は、ゼロよりも大きい任意の値でよい。ただし、画像投影面推定誤差および反射点位置推定誤差の標準偏差の大きさの概算値が既知である場合や、他の何らかのセンサ情報などから或る程度推定できる場合には、以下の式(38)で計算されるスケーリング係数γの値を用いてもよい。
【0166】
γ=εa/εb・・・(38)
【0167】
ただし、式(38)において、εaは、画像投影面推定誤差の標準偏差の概算値であり、εbは、反射点位置推定誤差の標準偏差の概算値である。
次に、誤差比率推定部28は、行列Cの特異値分解処理を実行する。特異値分解処理の結果は、以下の式(39)のように記述され得る。
【0168】
C(γ)=U(γ)Σ(γ)transpose(V(γ))・・・(39)
【0169】
式(39)において、U(γ)は、左特異値ベクトルを集めた行列であり、行数「2K」、列数「2K」の行列からなる。
また、Σ(γ)は、行数「2K」、列数「3+M」の行列からなり、その対角要素((1、1)要素、(2、2)要素・・・、(N、N)要素)は、特異値σ(1)、σ(2)、・・・、σ(N)である。ただし、特異値の数「N」は、「2K」または「3+M」のいずれか小さいほうの値と一致する。
また、V(γ)は、右特異値ベクトルを集めた行列であり、行数「3+M」、列数「3+M」の行列からなる。
さらに、行列Σ(γ)の対角要素である特異値σ(1)、σ(2)、・・・、σ(N)は、以下の式(40)の関係を満たす。
【0170】
σ(1)≧σ(2)≧・・・≧σ(N)・・・(40)
【0171】
次に、誤差比率推定部28は、特異値分解処理の結果として得られた特異値を用いて、以下の式(41)によって定義されるエントロピー量E(γ)を算出する。
【0172】
E(γ)=−P(4)log_(N−3)(P(4))
−P(5)log_(N−3)(P(5))
・
・
・
−P(N)log_(N−3)(P(N))・・・(41)
【0173】
ただし、式(41)において、log_(N−3)は、「N−3」を底とする対数を意味する。また、エントロピー量E(γ)は、「0」以上、「1」以下の値をとる量であり、σ(4)、σ(5)、・・・、σ(N)の値のばらつきを測る指標である。すなわち、エントロピー量E(γ)の値は、σ(4)、σ(5)、・・・、σ(N)の値がすべて等しい場合には最大値「1」となり、逆に、σ(4)、σ(5)、・・・、σ(N)の値の域が広いほど低下する。
さらに、P(j)(j=4、5、・・・、N)は、以下の式(42)のように表すことができる。
【0174】
P(j)=σ(j)/(σ(4)+σ(5)+・・・+σ(N))・・・(42)
【0175】
次に、誤差比率推定部28は、スケーリング係数γの値を一定量だけ変化させながら、上記式(37)〜式(42)で表される処理を反復して実行する。なお、反復回数は、事前に設定された所定回数とする。この反復処理の結果、スケーリング係数γの各値に対して、エントロピー量E(γ)が算出される。
【0176】
スケーリング係数γが、画像投影面推定誤差の標準偏差の真の値と、反射点位置推定誤差の標準偏差の真の値との誤差比率と一致する場合、エントロピー量E(γ)は、最大値「1」に近いことが期待される。
また、前述のAx=Bという線形システムにおいて、右辺の行列Bの各列は、左辺の行列Aの各列によって張られる線形空間内に存在するので、行列A、Bに観測誤差が含まれない場合、σ(4)、σ(5)、・・・、σ(N)の値はすべてゼロである。したがって、σ(4)、σ(5)、・・・、σ(N)がゼロでない場合、その値は観測誤差に起因する値である。
【0177】
さらに、観測誤差が白色雑音でモデル化できる場合には、σ(4)=σ(5)=・・・=σ(N)の関係を満たすことが期待されるので、この場合、エントロピー量E(γ)は最大値「1」となる。よって、スケーリング係数γの値が正しい場合、エントロピー量E(γ)は、最大値「1」に近い値をとることが期待される。
このことを踏まえて、誤差比率推定部28は、最終的に、エントロピー量E(γ)を最大とするスケーリング係数γの値を、誤差比率の推定値として出力する。
【0178】
また、誤差比率推定部28は、上記式(41)で定義されるエントロピー量E(γ)の代わりに、以下の式(43)のように定義される非等方性度a(γ)を用いてもよい。
【0179】
a(γ)=(σ(4)^2−σ(N)^2)/(σ(4)^2+σ(N)^2)・・・(43)
【0180】
非等方性度a(γ)を用いる場合、誤差比率推定部28は、非等方性度a(γ)を最小とするスケーリング係数γの値を誤差比率の推定値として出力する。
この場合、スケーリング係数γの値の推定精度は、エントロピー量E(γ)を用いた場合に比べて劣化する可能性が高いが、非等方性度a(γ)の値を算出するための演算量が、エントロピー量E(γ)を算出するための演算量に比べて少ないという利点がある。
【0181】
次に、画像投影面推定誤差考慮目標形状算出部29は、まず、誤差比率推定部28の出力したスケーリング係数γの値を用いて、上記式(37)〜式(39)で表される処理を実行する。
続いて、画像投影面推定誤差考慮目標形状算出部29は、式(39)で表される特異値分解の結果得られた右特異値ベクトルを集めた行列V(γ)の値を用いて、各反射点mの位置ベクトルss(m)の推定値(行列S)を式(44)によって算出する。
【0182】
S=−V(1:3、4:M+3)inv(V(4:M+3,4:M+3))・・・(44)
【0183】
なお、式(44)において、行列Sのm列目は、反射点mの位置ベクトルss(m)の推定値となる。
【0184】
以上のように、この発明の実施の形態4によれば、誤差比率推定部28は、画像投影面推定誤差の標準偏差の真の値と、反射点位置推定誤差の標準偏差の真の値との誤差比率を推定し、画像投影面推定誤差考慮目標形状算出部29は、誤差比率推定部28によって推定された誤差比率の推定値を利用して、たとえばScaled Total Least Square法により、目標Tの3次元形状(各反射点の3次元位置)を推定するようにしたので、画像投影面推定誤差が大きい場合の3次元形状の推定精度を向上させることができる。
【0185】
また、誤差比率推定部28は、画像投影面履歴算出部12により算出された画像投影面の推定値と、反射点位置履歴推定部15により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、特異値分解処理の結果として得られる特異値分布から定義されるエントロピー量または非等方性度を用い、エントロピー量を最大とする定数または非等方性度を最小とする定数を誤差比率の推定値として出力するので、画像投影面推定誤差が大きい場合の3次元形状の推定精度を向上させることができる。
【図面の簡単な説明】
【0186】
【図1】この発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。
【図2】この発明の実施の形態1における目標の観測状態のジオメトリを概念的に示す説明図である。
【図3】この発明の実施の形態1によるレーダ画像の一例を示す説明図である。
【図4】この発明の実施の形態1に係るレーダ画像再生部による処理を図式的に示す説明図である。
【図5】この発明の実施の形態1に係るレーダ画像再生部による処理を図式的に示す説明図である。
【図6】この発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。
【図7】この発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。
【図8】この発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。
【符号の説明】
【0187】
1 送信機、3 送受信アンテナ、4 電波照射手段、5 受信機、6 レーダ画像再生部、7 画像履歴蓄積部、8 反射点抽出部、9 画像間反射点対応部、10 相対位置運動推定部、11 相対位置履歴算出部、12 画像投影面履歴算出部、13 センサ手段、14 目標形状算出部、15 反射点位置履歴推定部、16 目標形状推定部、17 逐次形状考慮反射点対応部、18 次フレーム反射点位置予測部、19 目標形状逐次推定部、20 前処理目標形状推定部、21 区分フレーム列内反射点対応部、22 区分フレーム列内推定形状蓄積部、23 区分フレーム列間推定形状対応部、24 反射点位置履歴統合部、25 統合形状算出部、28 誤差比率推定部、29 画像投影面推定誤差考慮目標形状算出部、部30 画像投影面推定誤差考慮目標形状推定部、W1 送信電波、W2 受信電波、T 目標。
【特許請求の範囲】
【請求項1】
目標に対して送信電波を照射する電波照射手段と、
前記送信電波が前記目標で反射された反射電波を受信電波として受信する受信手段と、
前記受信電波に基づき前記目標上の反射点の3次元分布を所定の投影面に投影したレーダ画像を生成するレーダ画像再生部と、
前記レーダ画像上で前記反射点の像と考えられる反射点像を抽出する反射点抽出部と、
複数のレーダ画像のそれぞれに対して抽出された反射点像の対応付けを取る画像間反射点対応部と、
前記複数のレーダ画像の間で対応付けの取れた反射点の、各レーダ画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部と、
前記レーダ画像再生部で再生されるレーダ画像の投影面を特定するレンジ軸および前記レンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各レーダ画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部と、
前記レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、前記レンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定する目標形状算出部と
を備えた画像レーダ装置。
【請求項2】
前記目標との間の相対位置および相対運動に関する検出情報を生成するセンサ手段と、
前記検出情報、既知の位置および運動の変化情報、または、前記目標の観測結果に基づく追尾処理に基づいて、前記目標との間の相対位置および相対運動の変化を相対位置運動推定結果として特定または推定する相対位置運動推定部と、
前記相対位置運動推定結果に基づいて、前記目標との相対位置の変化を特定する相対位置履歴算出部とを備え、
前記画像投影面履歴算出部は、前記相対位置履歴算出部により得られた前記目標との相対位置の変化に基づいて、前記レンジ軸ベクトルおよび前記クロスレンジ軸ベクトルを推定することを特徴とする請求項1に記載の画像レーダ装置。
【請求項3】
前記画像投影面履歴算出部は、前記レンジ軸ベクトルおよび前記クロスレンジ軸ベクトルと、各レーダ画像を生成するデータとを得るために前記目標の位置関係を変えながら観測する際に、各レーダ位置を始点とした前記目標上の目標中心までの距離と、前記各レーダ位置を基準とした前記目標中心の方向の単位ベクトルと前記レンジ軸ベクトルおよびクロスレンジ軸ベクトルとの内積値とに基づいて、前記レーダ位置を基準とした目標方向の単位ベクトルと前記投影面に投影した方向のレンジ軸からの角度を取得し、
前記レーダ画像再生部は、前記レンジ軸ベクトル、前記クロスレンジ軸ベクトルおよび前記角度レーダを基準とした前記目標方向の単位ベクトルと前記投影面に投影した方向のレンジ軸からの角度および前記目標までの距離に基づいて、前記レンジ軸および前記クロスレンジ軸を2軸とするレーダ画像を生成することを特徴とする請求項1または請求項2に記載の画像レーダ装置。
【請求項4】
前記画像投影面履歴算出部は、
前記各レーダ画像を生成するデータを得るために前記目標との位置関係を変えながら観測する際に、各レーダ位置を始点とした目標中心までの距離と、前記各レーダ位置を基準とした前記目標上の目標中心方向の各単位ベクトルに基づいて、ラグランジュ乗数法により、
長さが「1」という制約条件の下に、前記各単位ベクトルとの内積値の2乗平均値が最小となる単位ベクトルを決定し、前記内積値の2乗平均値が最小となる単位ベクトルを前記投影面の法線ベクトルとし、
また、長さが「1」という制約条件の下で、前記各単位ベクトルとの内積値が最大となる単位ベクトルを決定し、前記内積値が最大となる単位ベクトルをレンジ軸ベクトルとし、
前記法線ベクトルと前記レンジ軸ベクトルとの外積演算に基づいて前記クロスレンジ軸ベクトルを算出することを特徴とする請求項1から請求項3までのいずれか1項に記載の画像レーダ装置。
【請求項5】
前記画像投影面履歴算出部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記レンジ軸または前記クロスレンジ軸の方向が急に反転することを防ぐために、
前記第k+1番目のレーダ画像の投影面の法線方向の単位ベクトルの符号を、前記第k番目のレーダ画像の投影面の法線ベクトルとの内積値が正となるように選択し、
かつ、前記レンジ軸ベクトルの方向が、各レーダ位置を基準とした目標方向の単位ベクトルと一致するように、
前記レンジ軸ベクトルの符号を、前記各レーダ位置を基準とした前記目標方向の単位ベクトルとの内積値の平均値が正になるように選択することを特徴とする請求項1から請求項4までのいずれか1項に記載の画像レーダ装置。
【請求項6】
前記画像間反射点対応部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記反射点抽出部で抽出された各反射点像を対応付ける際に、
前記各レーダ画像の間で抽出された各反射点像の間の距離を算出し、前記各反射点像の間の距離が最小となる組合せを選択することを特徴とする請求項1から請求項5までのいずれか1項に記載の画像レーダ装置。
【請求項7】
前記画像間反射点対応部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記反射点抽出部で抽出された各反射点像を対応付ける際に、
前記第k番目までのレーダ画像上の同じ反射点像と考えられる抽出結果の位置に基づいて、カルマンフィルタ理論を用いて前記第k+1番目のレーダ画像における反射点像の出現位置を予測し、前記反射点像の予測位置に最も近い反射点像を前記第k+1番目の反射点像とすることを特徴とする請求項1から請求項5までのいずれか1項に記載の画像レーダ装置。
【請求項8】
前記画像間反射点対応部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記反射点抽出部で抽出された各反射点像を対応付ける際に、
前記第k番目のレーダ画像上の反射点の振幅または振幅分布、または、前記第k番目までのレーダ画像における同じ反射点の振幅値の平均値に近い反射点像を前記第k+1番目のレーダ画像上で抽出された反射点像から探索して対応付けすることを特徴とする請求項1から請求項5までのいずれか1項に記載の画像レーダ装置。
【請求項9】
前記目標形状算出部は、
前記画像投影面履歴算出部で得られたK枚のレーダ画像における各レンジ軸ベクトルを3行1列の列ベクトルと見なし、前記列ベクトルをK列合わせて3行K列の行列を生成するとともに、前記行列を転置した行列Aを生成し、
前記反射点位置履歴推定部で得られた各反射点のK枚のレーダ画像におけるレンジを構成要素としたK行1列の列ベクトルを生成し、
前記行列Aの一般化逆行列と前記K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、前記各反射点の位置ベクトルを推定して出力することを特徴とする請求項1から請求項8までのいずれか1項に記載の画像レーダ装置。
【請求項10】
前記目標形状算出部は、
前記画像投影面履歴算出部で得られたK枚のレーダ画像における各クロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、前記列ベクトルをK列合わせて3行K列の行列を生成するとともに、前記行列を転置した行列Aを生成し、
前記反射点位置履歴推定部で得られた各反射点のK枚のレーダ画像におけるクロスレンジを構成要素としたK行1列の列ベクトルを生成し、
前記行列Aの一般化逆行列と前記K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、前記各反射点の位置ベクトルを推定することを特徴とする請求項1から請求項8までのいずれか1項に記載の画像レーダ装置。
【請求項11】
前記目標形状算出部は、
前記画像投影面履歴算出部で得られたK枚のレーダ画像における各レンジ軸ベクトルおよびクロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、前記列ベクトルをK列合わせて3行2K列の行列を生成するとともに、前記行列を転置した行列Aを生成し、
前記反射点位置履歴推定部で得られた各反射点のK枚のレーダ画像におけるレンジおよびクロスレンジを構成要素とした2K行1列の列ベクトルを生成し、
前記行列Aの一般化逆行列と前記2K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、前記各反射点の位置ベクトルを推定することを特徴とする請求項1から請求項8までのいずれか1項に記載の画像レーダ装置。
【請求項12】
前記反射点位置履歴推定部は、
前記各反射点の各レーダ画像間の対応付け結果に基づいて、隣接するレーダ画像における同じ反射点との距離が大きいレーダ画像、または、反射点の存在しないレーダ画像の信頼度の重みを小さく設定し、同じ反射点との距離が小さいレーダ画像の信頼度の重みを大きく設定し、
前記目標形状算出部は、
前記信頼度の重みに閾値を設定して、前記信頼度の重みが前記閾値を越えたK’枚の画像についてのみ、前記レンジ軸ベクトルまたは前記クロスレンジ軸ベクトルを用いて前記一般化逆行列を生成し、
選択された画像についてのみ、前記レンジまたは前記クロスレンジの値を用いてK’行1列の列ベクトルを生成し、
前記一般化逆行列および前記K’行1列の列ベクトルに基づいて前記反射点の位置ベクトルを推定する処理を各反射点ごとに繰り返し実行して、前記各反射点の位置ベクトルを推定することを特徴とする請求項9から請求項11までのいずれか1項に記載の画像レーダ装置。
【請求項13】
前記目標形状算出部は、
注目する反射点についての前記K行1列、2K行1列またはK’行1列の列ベクトルの各要素のうち、
各レーダ画像におけるレンジの値の代わりに、前記レンジの値に目標中心のレンジを加えた値を設定するとともに、
前記各レーダ画像におけるクロスレンジの値の代わりに、前記クロスレンジの値に前記目標中心のクロスレンジを加えた値を設定することを特徴とする請求項9から請求項12までのいずれか1項に記載の画像レーダ装置。
【請求項14】
前記目標形状算出部は、前記目標上の各反射点の3次元位置に加えて、前記各反射点の反射強度値を出力することを特徴とする請求項1から請求項13までのいずれか1項に記載の画像レーダ装置。
【請求項15】
前記レーダ画像再生部から生成された複数のレーダ画像を画像履歴として蓄積する画像履歴蓄積部と、
フレーム番号が連続する第k番目のレーダ画像までのデータを用いて前記目標形状算出部で得られた目標形状と、前記画像投影面履歴算出部で得られた第k+1番目のレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、前記第k+1番目のレーダ画像における目標中心の位置ベクトルとに基づいて、前記第k+1番目のレーダ画像における各反射点のレンジとクロスレンジを推定する次フレーム反射点位置予測部とを備え、
前記画像間反射点対応部は、逐次形状考慮反射点対応部として機能し、前記次フレーム反射点位置予測部で得られた前記第k+1番目のレーダ画像における各反射点のレンジとクロスレンジの推定結果を、前記レーダ画像再生部で生成されかつ前記画像履歴蓄積部で蓄積された前記第k+1番目のレーダ画像について、前記反射点抽出部で抽出された各反射点像のレンジおよびクロスレンジと比較し、両者が最も近い各反射点を対応付け、
前記反射点位置履歴推定部は、前記逐次形状考慮反射点対応部による対応付け結果に基づいて、前記各反射点ごとのレンジおよびクロスレンジの履歴を算出することを特徴とする請求項1から請求項14までのいずれか1項に記載の画像レーダ装置。
【請求項16】
前記レーダ画像再生部から生成されたレーダ画像の履歴を蓄積する画像履歴蓄積部と、
前記目標形状算出部に関連した区分フレーム列内推定形状蓄積部、区分フレーム列間推定形状対応部、反射点位置履歴統合部および統合形状算出部とを備え、
前記画像間反射点対応部は、区分フレーム列内反射点対応部として機能し、前記反射点抽出部で得られた各レーダ画像における反射点の抽出結果の対応付けを検討して、前記レーダ画像のフレーム列を複数の区分フレーム列に分離し、前記各区分フレーム列ごとに反射点間の対応付けを取り、
前記反射点位置履歴推定部は、区分フレーム反射点位置履歴推定部として機能し、前記区分フレーム列内反射点対応部による対応付け結果に基づいて、前記各区分フレームごとに反射点のレンジおよびクロスレンジの履歴を算出し、
前記目標形状算出部は、区分フレーム列内目標形状算出部として機能し、前記各区分フレームごとに各反射点の3次元の位置ベクトルを推定し、
前記区分フレーム列内推定形状蓄積部は、前記各区分フレームごとに得られた各反射点の3次元の位置ベクトルを蓄積し、
前記区分フレーム列間推定形状対応部は、前記各区分フレーム列ごとに各反射点について得られた3次元の位置ベクトルを比較し、各反射点間の距離が小さい反射点同士を同じ反射点と見なし、
前記反射点位置履歴統合部は、前記区分フレーム列間推定形状対応部により同じ反射点と見なされた反射点について、前記区分フレーム反射点位置履歴推定部で得られた各反射点の画像上のレンジおよびクロスレンジの履歴を統合し、
前記統合形状算出部は、前記反射点位置履歴統合部で統合された各反射点のレンジおよびクロスレンジ位置と、前記画像投影面履歴算出部で得られたレンジ軸ベクトルおよびクロスレンジ軸ベクトルに基づいて、各反射点の3次元位置を推定して推定結果を出力することを特徴とする請求項1から請求項14までのいずれか1項に記載の画像レーダ装置。
【請求項17】
前記画像投影面履歴算出部により算出された画像投影面の推定値に含まれる誤差と、前記反射点位置履歴推定部により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に含まれる推定誤差の大きさとの誤差比率を算出する誤差比率推定部と、
前記誤差比率の値を用い、前記画像投影面の推定値に含まれる誤差を考慮しながら、前記目標上の各反射点の3次元位置を推定する画像投影面推定誤差考慮目標形状算出部と
を備えたことを特徴とする請求項1から請求項14までのいずれか1項に記載の画像レーダ装置。
【請求項18】
前記誤差比率推定部は、前記画像投影面履歴算出部により算出された前記画像投影面の推定値と、前記反射点位置履歴推定部により算出された前記レンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、前記特異値分解処理の結果として得られる特異値分布から定義されるエントロピー量を用い、前記エントロピー量を最大とする前記定数を前記誤差比率の推定値として出力することを特徴とする請求項17に記載の画像レーダ装置。
【請求項19】
前記誤差比率推定部は、前記画像投影面履歴算出部により算出された前記画像投影面の推定値と、前記反射点位置履歴推定部により算出された前記レンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、前記特異値分解処理の結果として得られる特異値分布から定義される非等方性度を用い、前記非等方性度を最小とする前記定数を前記誤差比率の推定値として出力することを特徴とする請求項17に記載の画像レーダ装置。
【請求項20】
前記画像投影面推定誤差考慮目標形状算出部は、前記誤差比率推定部により推定された前記誤差比率の推定値をスケーリング係数として利用しながら、スケールド・トータル・リースト・スクエア(Scaled Total Least Square)法によって前記各反射点の3次元位置を推定することを特徴とする請求項17から請求項19までのいずれか1項に記載の画像レーダ装置。
【請求項1】
目標に対して送信電波を照射する電波照射手段と、
前記送信電波が前記目標で反射された反射電波を受信電波として受信する受信手段と、
前記受信電波に基づき前記目標上の反射点の3次元分布を所定の投影面に投影したレーダ画像を生成するレーダ画像再生部と、
前記レーダ画像上で前記反射点の像と考えられる反射点像を抽出する反射点抽出部と、
複数のレーダ画像のそれぞれに対して抽出された反射点像の対応付けを取る画像間反射点対応部と、
前記複数のレーダ画像の間で対応付けの取れた反射点の、各レーダ画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部と、
前記レーダ画像再生部で再生されるレーダ画像の投影面を特定するレンジ軸および前記レンジ軸に直交するクロスレンジ軸方向の単位ベクトルとして、各レーダ画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部と、
前記レンジ軸ベクトルおよびクロスレンジ軸ベクトルと、前記レンジ軸方向およびクロスレンジ軸方向の各位置とに基づいて、各反射点の3次元位置を推定する目標形状算出部と
を備えた画像レーダ装置。
【請求項2】
前記目標との間の相対位置および相対運動に関する検出情報を生成するセンサ手段と、
前記検出情報、既知の位置および運動の変化情報、または、前記目標の観測結果に基づく追尾処理に基づいて、前記目標との間の相対位置および相対運動の変化を相対位置運動推定結果として特定または推定する相対位置運動推定部と、
前記相対位置運動推定結果に基づいて、前記目標との相対位置の変化を特定する相対位置履歴算出部とを備え、
前記画像投影面履歴算出部は、前記相対位置履歴算出部により得られた前記目標との相対位置の変化に基づいて、前記レンジ軸ベクトルおよび前記クロスレンジ軸ベクトルを推定することを特徴とする請求項1に記載の画像レーダ装置。
【請求項3】
前記画像投影面履歴算出部は、前記レンジ軸ベクトルおよび前記クロスレンジ軸ベクトルと、各レーダ画像を生成するデータとを得るために前記目標の位置関係を変えながら観測する際に、各レーダ位置を始点とした前記目標上の目標中心までの距離と、前記各レーダ位置を基準とした前記目標中心の方向の単位ベクトルと前記レンジ軸ベクトルおよびクロスレンジ軸ベクトルとの内積値とに基づいて、前記レーダ位置を基準とした目標方向の単位ベクトルと前記投影面に投影した方向のレンジ軸からの角度を取得し、
前記レーダ画像再生部は、前記レンジ軸ベクトル、前記クロスレンジ軸ベクトルおよび前記角度レーダを基準とした前記目標方向の単位ベクトルと前記投影面に投影した方向のレンジ軸からの角度および前記目標までの距離に基づいて、前記レンジ軸および前記クロスレンジ軸を2軸とするレーダ画像を生成することを特徴とする請求項1または請求項2に記載の画像レーダ装置。
【請求項4】
前記画像投影面履歴算出部は、
前記各レーダ画像を生成するデータを得るために前記目標との位置関係を変えながら観測する際に、各レーダ位置を始点とした目標中心までの距離と、前記各レーダ位置を基準とした前記目標上の目標中心方向の各単位ベクトルに基づいて、ラグランジュ乗数法により、
長さが「1」という制約条件の下に、前記各単位ベクトルとの内積値の2乗平均値が最小となる単位ベクトルを決定し、前記内積値の2乗平均値が最小となる単位ベクトルを前記投影面の法線ベクトルとし、
また、長さが「1」という制約条件の下で、前記各単位ベクトルとの内積値が最大となる単位ベクトルを決定し、前記内積値が最大となる単位ベクトルをレンジ軸ベクトルとし、
前記法線ベクトルと前記レンジ軸ベクトルとの外積演算に基づいて前記クロスレンジ軸ベクトルを算出することを特徴とする請求項1から請求項3までのいずれか1項に記載の画像レーダ装置。
【請求項5】
前記画像投影面履歴算出部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記レンジ軸または前記クロスレンジ軸の方向が急に反転することを防ぐために、
前記第k+1番目のレーダ画像の投影面の法線方向の単位ベクトルの符号を、前記第k番目のレーダ画像の投影面の法線ベクトルとの内積値が正となるように選択し、
かつ、前記レンジ軸ベクトルの方向が、各レーダ位置を基準とした目標方向の単位ベクトルと一致するように、
前記レンジ軸ベクトルの符号を、前記各レーダ位置を基準とした前記目標方向の単位ベクトルとの内積値の平均値が正になるように選択することを特徴とする請求項1から請求項4までのいずれか1項に記載の画像レーダ装置。
【請求項6】
前記画像間反射点対応部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記反射点抽出部で抽出された各反射点像を対応付ける際に、
前記各レーダ画像の間で抽出された各反射点像の間の距離を算出し、前記各反射点像の間の距離が最小となる組合せを選択することを特徴とする請求項1から請求項5までのいずれか1項に記載の画像レーダ装置。
【請求項7】
前記画像間反射点対応部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記反射点抽出部で抽出された各反射点像を対応付ける際に、
前記第k番目までのレーダ画像上の同じ反射点像と考えられる抽出結果の位置に基づいて、カルマンフィルタ理論を用いて前記第k+1番目のレーダ画像における反射点像の出現位置を予測し、前記反射点像の予測位置に最も近い反射点像を前記第k+1番目の反射点像とすることを特徴とする請求項1から請求項5までのいずれか1項に記載の画像レーダ装置。
【請求項8】
前記画像間反射点対応部は、
フレーム番号が連続する第k番目のレーダ画像と第k+1番目のレーダ画像との間で、前記反射点抽出部で抽出された各反射点像を対応付ける際に、
前記第k番目のレーダ画像上の反射点の振幅または振幅分布、または、前記第k番目までのレーダ画像における同じ反射点の振幅値の平均値に近い反射点像を前記第k+1番目のレーダ画像上で抽出された反射点像から探索して対応付けすることを特徴とする請求項1から請求項5までのいずれか1項に記載の画像レーダ装置。
【請求項9】
前記目標形状算出部は、
前記画像投影面履歴算出部で得られたK枚のレーダ画像における各レンジ軸ベクトルを3行1列の列ベクトルと見なし、前記列ベクトルをK列合わせて3行K列の行列を生成するとともに、前記行列を転置した行列Aを生成し、
前記反射点位置履歴推定部で得られた各反射点のK枚のレーダ画像におけるレンジを構成要素としたK行1列の列ベクトルを生成し、
前記行列Aの一般化逆行列と前記K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、前記各反射点の位置ベクトルを推定して出力することを特徴とする請求項1から請求項8までのいずれか1項に記載の画像レーダ装置。
【請求項10】
前記目標形状算出部は、
前記画像投影面履歴算出部で得られたK枚のレーダ画像における各クロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、前記列ベクトルをK列合わせて3行K列の行列を生成するとともに、前記行列を転置した行列Aを生成し、
前記反射点位置履歴推定部で得られた各反射点のK枚のレーダ画像におけるクロスレンジを構成要素としたK行1列の列ベクトルを生成し、
前記行列Aの一般化逆行列と前記K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、前記各反射点の位置ベクトルを推定することを特徴とする請求項1から請求項8までのいずれか1項に記載の画像レーダ装置。
【請求項11】
前記目標形状算出部は、
前記画像投影面履歴算出部で得られたK枚のレーダ画像における各レンジ軸ベクトルおよびクロスレンジ軸ベクトルを3行1列の列ベクトルと見なし、前記列ベクトルをK列合わせて3行2K列の行列を生成するとともに、前記行列を転置した行列Aを生成し、
前記反射点位置履歴推定部で得られた各反射点のK枚のレーダ画像におけるレンジおよびクロスレンジを構成要素とした2K行1列の列ベクトルを生成し、
前記行列Aの一般化逆行列と前記2K行1列の列ベクトルとの積により反射点の位置ベクトルを得る処理を複数の反射点について繰り返し実行し、前記各反射点の位置ベクトルを推定することを特徴とする請求項1から請求項8までのいずれか1項に記載の画像レーダ装置。
【請求項12】
前記反射点位置履歴推定部は、
前記各反射点の各レーダ画像間の対応付け結果に基づいて、隣接するレーダ画像における同じ反射点との距離が大きいレーダ画像、または、反射点の存在しないレーダ画像の信頼度の重みを小さく設定し、同じ反射点との距離が小さいレーダ画像の信頼度の重みを大きく設定し、
前記目標形状算出部は、
前記信頼度の重みに閾値を設定して、前記信頼度の重みが前記閾値を越えたK’枚の画像についてのみ、前記レンジ軸ベクトルまたは前記クロスレンジ軸ベクトルを用いて前記一般化逆行列を生成し、
選択された画像についてのみ、前記レンジまたは前記クロスレンジの値を用いてK’行1列の列ベクトルを生成し、
前記一般化逆行列および前記K’行1列の列ベクトルに基づいて前記反射点の位置ベクトルを推定する処理を各反射点ごとに繰り返し実行して、前記各反射点の位置ベクトルを推定することを特徴とする請求項9から請求項11までのいずれか1項に記載の画像レーダ装置。
【請求項13】
前記目標形状算出部は、
注目する反射点についての前記K行1列、2K行1列またはK’行1列の列ベクトルの各要素のうち、
各レーダ画像におけるレンジの値の代わりに、前記レンジの値に目標中心のレンジを加えた値を設定するとともに、
前記各レーダ画像におけるクロスレンジの値の代わりに、前記クロスレンジの値に前記目標中心のクロスレンジを加えた値を設定することを特徴とする請求項9から請求項12までのいずれか1項に記載の画像レーダ装置。
【請求項14】
前記目標形状算出部は、前記目標上の各反射点の3次元位置に加えて、前記各反射点の反射強度値を出力することを特徴とする請求項1から請求項13までのいずれか1項に記載の画像レーダ装置。
【請求項15】
前記レーダ画像再生部から生成された複数のレーダ画像を画像履歴として蓄積する画像履歴蓄積部と、
フレーム番号が連続する第k番目のレーダ画像までのデータを用いて前記目標形状算出部で得られた目標形状と、前記画像投影面履歴算出部で得られた第k+1番目のレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、前記第k+1番目のレーダ画像における目標中心の位置ベクトルとに基づいて、前記第k+1番目のレーダ画像における各反射点のレンジとクロスレンジを推定する次フレーム反射点位置予測部とを備え、
前記画像間反射点対応部は、逐次形状考慮反射点対応部として機能し、前記次フレーム反射点位置予測部で得られた前記第k+1番目のレーダ画像における各反射点のレンジとクロスレンジの推定結果を、前記レーダ画像再生部で生成されかつ前記画像履歴蓄積部で蓄積された前記第k+1番目のレーダ画像について、前記反射点抽出部で抽出された各反射点像のレンジおよびクロスレンジと比較し、両者が最も近い各反射点を対応付け、
前記反射点位置履歴推定部は、前記逐次形状考慮反射点対応部による対応付け結果に基づいて、前記各反射点ごとのレンジおよびクロスレンジの履歴を算出することを特徴とする請求項1から請求項14までのいずれか1項に記載の画像レーダ装置。
【請求項16】
前記レーダ画像再生部から生成されたレーダ画像の履歴を蓄積する画像履歴蓄積部と、
前記目標形状算出部に関連した区分フレーム列内推定形状蓄積部、区分フレーム列間推定形状対応部、反射点位置履歴統合部および統合形状算出部とを備え、
前記画像間反射点対応部は、区分フレーム列内反射点対応部として機能し、前記反射点抽出部で得られた各レーダ画像における反射点の抽出結果の対応付けを検討して、前記レーダ画像のフレーム列を複数の区分フレーム列に分離し、前記各区分フレーム列ごとに反射点間の対応付けを取り、
前記反射点位置履歴推定部は、区分フレーム反射点位置履歴推定部として機能し、前記区分フレーム列内反射点対応部による対応付け結果に基づいて、前記各区分フレームごとに反射点のレンジおよびクロスレンジの履歴を算出し、
前記目標形状算出部は、区分フレーム列内目標形状算出部として機能し、前記各区分フレームごとに各反射点の3次元の位置ベクトルを推定し、
前記区分フレーム列内推定形状蓄積部は、前記各区分フレームごとに得られた各反射点の3次元の位置ベクトルを蓄積し、
前記区分フレーム列間推定形状対応部は、前記各区分フレーム列ごとに各反射点について得られた3次元の位置ベクトルを比較し、各反射点間の距離が小さい反射点同士を同じ反射点と見なし、
前記反射点位置履歴統合部は、前記区分フレーム列間推定形状対応部により同じ反射点と見なされた反射点について、前記区分フレーム反射点位置履歴推定部で得られた各反射点の画像上のレンジおよびクロスレンジの履歴を統合し、
前記統合形状算出部は、前記反射点位置履歴統合部で統合された各反射点のレンジおよびクロスレンジ位置と、前記画像投影面履歴算出部で得られたレンジ軸ベクトルおよびクロスレンジ軸ベクトルに基づいて、各反射点の3次元位置を推定して推定結果を出力することを特徴とする請求項1から請求項14までのいずれか1項に記載の画像レーダ装置。
【請求項17】
前記画像投影面履歴算出部により算出された画像投影面の推定値に含まれる誤差と、前記反射点位置履歴推定部により算出されたレンジ軸方向およびクロスレンジ軸方向の各位置の値に含まれる推定誤差の大きさとの誤差比率を算出する誤差比率推定部と、
前記誤差比率の値を用い、前記画像投影面の推定値に含まれる誤差を考慮しながら、前記目標上の各反射点の3次元位置を推定する画像投影面推定誤差考慮目標形状算出部と
を備えたことを特徴とする請求項1から請求項14までのいずれか1項に記載の画像レーダ装置。
【請求項18】
前記誤差比率推定部は、前記画像投影面履歴算出部により算出された前記画像投影面の推定値と、前記反射点位置履歴推定部により算出された前記レンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、前記特異値分解処理の結果として得られる特異値分布から定義されるエントロピー量を用い、前記エントロピー量を最大とする前記定数を前記誤差比率の推定値として出力することを特徴とする請求項17に記載の画像レーダ装置。
【請求項19】
前記誤差比率推定部は、前記画像投影面履歴算出部により算出された前記画像投影面の推定値と、前記反射点位置履歴推定部により算出された前記レンジ軸方向およびクロスレンジ軸方向の各位置の値に定数を乗算した値とを要素とする行列に対して、特異値分解処理を実行し、前記特異値分解処理の結果として得られる特異値分布から定義される非等方性度を用い、前記非等方性度を最小とする前記定数を前記誤差比率の推定値として出力することを特徴とする請求項17に記載の画像レーダ装置。
【請求項20】
前記画像投影面推定誤差考慮目標形状算出部は、前記誤差比率推定部により推定された前記誤差比率の推定値をスケーリング係数として利用しながら、スケールド・トータル・リースト・スクエア(Scaled Total Least Square)法によって前記各反射点の3次元位置を推定することを特徴とする請求項17から請求項19までのいずれか1項に記載の画像レーダ装置。
【図1】


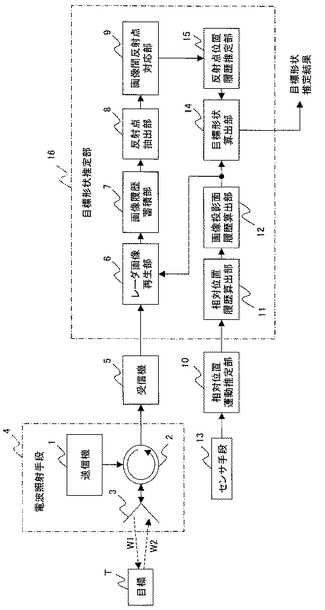
【図2】
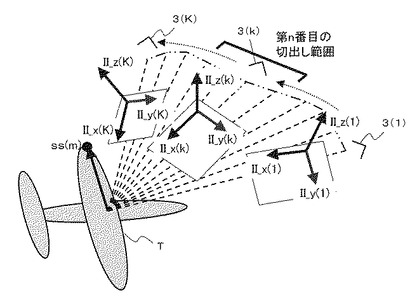
【図3】
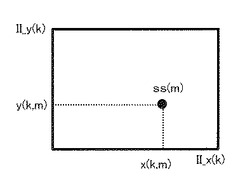
【図4】
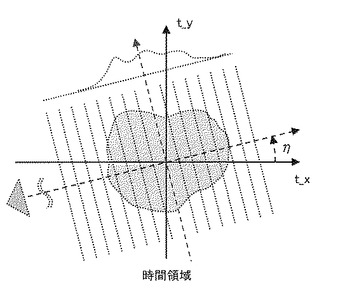
【図5】
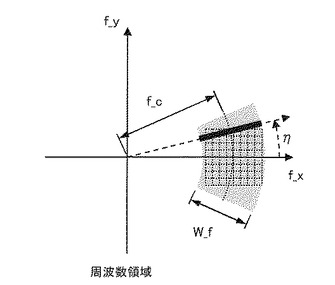
【図6】
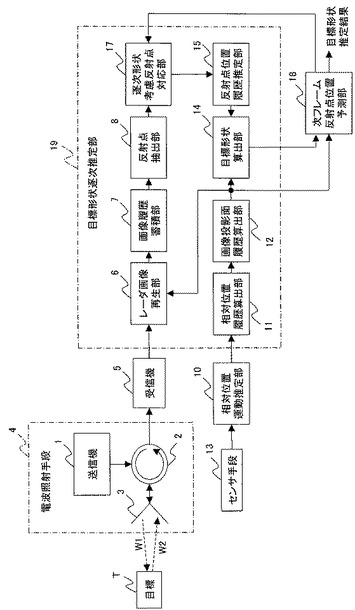
【図7】
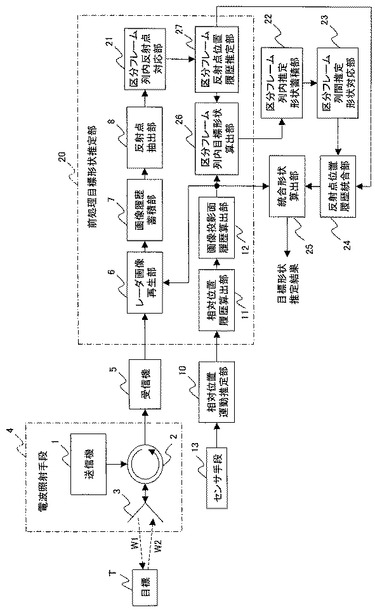
【図8】
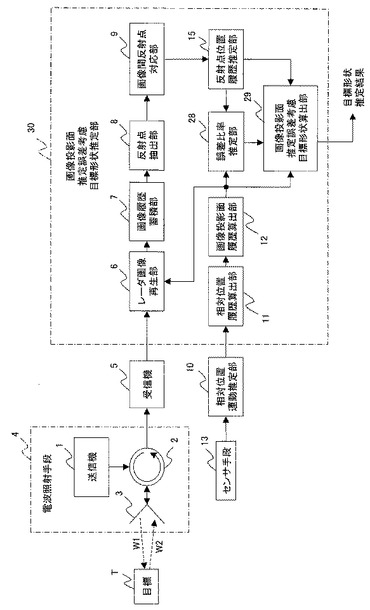
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−263948(P2007−263948A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2007−16351(P2007−16351)
【出願日】平成19年1月26日(2007.1.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成19年1月26日(2007.1.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]