
画像レーダ装置
【課題】画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる画像レーダ装置を得る。
【解決手段】軌道データ格納部12に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部21と、地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部22と、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定する補償量決定部23と、位相補償量に基づいて、観測データ格納部13に格納された観測データの位相を補償する補償処理部31と、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部32とを備える。
【解決手段】軌道データ格納部12に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部21と、地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部22と、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定する補償量決定部23と、位相補償量に基づいて、観測データ格納部13に格納された観測データの位相を補償する補償処理部31と、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部32とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、航空機や人工衛星といった移動可能なプラットフォームに搭載されて、地表等を観測する画像レーダ装置に関し、特に、合成開口レーダを用いた画像レーダ装置に関する。
【背景技術】
【0002】
一般的に、合成開口レーダを用いた画像レーダ装置では、画像レーダ装置が搭載されたプラットフォームの軌道が直線であると仮定して画像が再生される。しかしながら、プラットフォームが航空機である場合には、風の影響等を受けるので、直線軌道を描くことは困難である。また、プラットフォームが人工衛星である場合には、地球を周回することとなるので、直線軌道ではなく円軌道となる。このように、プラットフォームの軌道が直線軌道から外れると、再生される画像にぼけが発生する。
【0003】
そこで、このような画像のぼけを防止する方法として、観測データの位相を補償する動揺補償法が知られている。この動揺補償法では、画像化する領域を分割した上で、各領域の中心点を位相補償の基準点と定め、領域毎に位相補償量を算出している(例えば、特許文献1参照)。
【0004】
ここで、実際のプラットフォームの軌道を実軌道と定義し、画像再生に用いられる直線軌道を参照軌道と定義すると、分割した領域m(m=1,2,・・・,M)における位相補償量θm[η]は、上記基準点と実軌道および参照軌道との距離差dm[η]を用いて、次式(1)で表される。なお、距離差dm[η]は、次式(2)で表される。
【0005】
【数1】

【0006】
【数2】
【0007】
式(2)において、Pi[η](ベクトル)は、時刻(slow time)ηにおける参照軌道上のプラットフォームの位置を示し、Pa[η](ベクトル)は、時刻ηにおける実軌道上のプラットフォームの位置を示し、Qm(ベクトル)は、分割した領域mの基準点の位置を示している。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−256058号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、従来技術には、以下のような課題がある。
従来の動揺補償法では、1つの基準点に対して位相補償を実行しているので、基準点から離れるほど、補償誤差が大きくなって画像がぼけるという問題がある。従来の動揺補償法では、この問題を解決するために、画像化する領域を分割しているが、その分割サイズは、分割された全ての領域において、補償誤差の大きさが基準値以下になるように設定される必要がある。
【0010】
そのため、従来の動揺補償法では、分割する領域のサイズを大きくすることができず、かつ分割した領域毎に画像再生処理を実行する必要があるので、画像再生処理の効率が低下するという問題がある。また、分割して再生した画像を1枚の画像に結合しても、分割した領域どうしの境界において、例えば画像の振幅や位相値がつながらず、不連続になるという問題もある。
【0011】
この発明は、上記のような課題を解決するためになされたものであり、基準点を複数設定することにより、画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる画像レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0012】
この発明に係る画像レーダ装置は、観測パラメータとして、少なくともレーダの送信波長を格納する観測パラメータ格納部と、レーダ観測時のプラットフォームの位置を時刻とともに格納する軌道データ格納部と、レーダ観測で得られた受信波のデータを格納する観測データ格納部と、軌道データ格納部に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部と、地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部と、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定する補償量決定部と、位相補償量に基づいて、観測データ格納部に格納された観測データの位相を補償する補償処理部と、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部と、を備えたものである。
【発明の効果】
【0013】
この発明に係る画像レーダ装置によれば、参照軌道算出部は、軌道データ格納部に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出し、複数基準点設定部は、地表上に、位相補償に用いられる複数の基準点を設定し、補償量決定部は、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定し、補償処理部は、位相補償量に基づいて、観測データ格納部に格納された観測データの位相を補償し、再生処理部は、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する。
そのため、画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる。
【図面の簡単な説明】
【0014】
【図1】この発明の実施の形態1に係る画像レーダ装置を示すブロック構成図である。
【図2】この発明の実施の形態1に係る画像レーダ装置の動作を示すフローチャートである。
【図3】この発明の実施の形態1に係る画像レーダ装置の実軌道および参照軌道と基準点との関係を示す説明図である。
【図4】この発明の実施の形態2に係る画像レーダ装置を示すブロック構成図である。
【図5】この発明の実施の形態2に係る画像レーダ装置の動作を示すフローチャートである。
【図6】この発明の実施の形態2に係る画像レーダ装置の従来の動揺補償法による基準点からの距離と位相誤差との関係を示す説明図である。
【発明を実施するための形態】
【0015】
以下、この発明の画像レーダ装置の好適な実施の形態につき図面を用いて説明するが、各図において同一、または相当する部分については、同一符号を付して説明する。
なお、以下の実施の形態では、移動可能なプラットフォームである航空機に、合成開口レーダを用いた画像レーダ装置が搭載されている場合について説明する。
【0016】
実施の形態1.
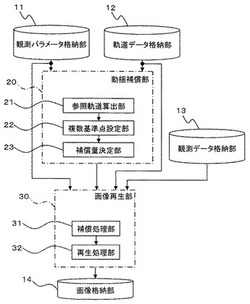
図1は、この発明の実施の形態1に係る画像レーダ装置を示すブロック構成図である。
図1において、この画像レーダ装置は、観測パラメータ格納部11、軌道データ格納部12、観測データ格納部13、画像格納部14、動揺補償部20および画像再生部30を備えている。
【0017】
観測パラメータ格納部11は、送信波長等の合成開口レーダ観測のパラメータを格納している。なお、観測パラメータ格納部11には、少なくとも送信波長が格納されている必要がある。
【0018】
軌道データ格納部12は、レーダ観測時のプラットフォームの位置や姿勢等の情報を格納している。ここで、プラットフォームの位置を記録するための座標系は、地球重心座標系や緯度・経度・高度等の全世界的な座標系であってもよいし、プラットフォームを基準とした航法座標系等の局所的な座標系であってもよい。
【0019】
観測データ格納部13は、レーダ観測で得られた受信波のデータを格納する。このデータの形式は、レーダ装置の受信アンテナで得られた受信波の電界強度をそのまま記録したものであってもよいし、位相検波処理により、実数として記録されている信号を複素数にしたものであってもよい。また、パルス変調を利用して、実際よりも短いパルスに圧縮したパルス圧縮処理後のデータであってもよい。
【0020】
動揺補償部20は、位相補償量を算出する部分であり、参照軌道算出部21、複数基準点設定部22および補償量決定部23を有している。
参照軌道算出部21は、実軌道から参照軌道を算出する。複数基準点設定部22は、位相補償に用いられる複数の基準点を設定する。補償量決定部23は、補償する位相量を決定する。
【0021】
画像再生部30は、画像再生処理を実行する部分であり、補償処理部31および再生処理部32を有している。
補償処理部31は、補償量決定部23で決定された位相補償量に基づいて、観測データの位相を補償する。再生処理部32は、位相補償された観測データに対して画像再生処理を実行する。なお、再生処理部32で再生された画像は、画像格納部14に格納される。
【0022】
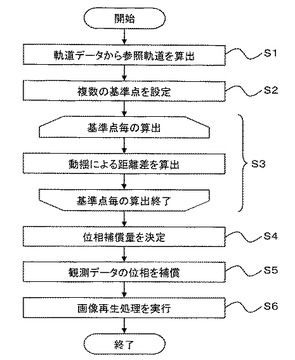
続いて、図2のフローチャートを参照しながら、この発明の実施の形態1に係る画像レーダ装置の動作について説明する。
まず、参照軌道算出部21は、軌道データ格納部12に格納された軌道データ、すなわち実軌道に基づいて、参照軌道を算出する(ステップS1)。
【0023】
ここで、参照軌道を算出方法するに際して、実軌道の全部または一部について移動速度や位置を平均し、プラットフォームが等速直線運動しているとしてもよいし、画像再生に用いられる実効速度、すなわち実軌道の速度でなく、観測地点とプラットフォームとの間の距離変化を多項式でフィッティングして得られる速度で、プラットフォームが運動しているとしてもよい。
【0024】
続いて、複数基準点設定部22は、位相補償に用いられる複数の基準点を設定する(ステップS2)。
この基準点は、複数かつ画像化する全ての領域にわたって配置される。配置の形状は、格子状であってもよいし、同心円状であってもよいし、任意に設定することができる。
【0025】
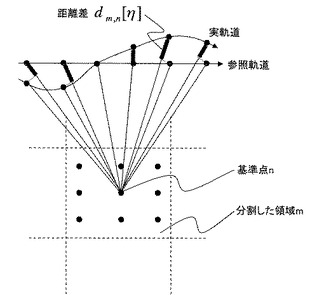
次に、補償量決定部23は、時刻毎に動揺による実軌道および参照軌道と基準点との距離差を算出する(ステップS3)。なお、このステップS3の処理は、全ての基準点について、基準点毎に実行される。この発明の実施の形態1に係る画像レーダ装置の実軌道および参照軌道と基準点との関係を図3に例示する。
具体的には、補償量決定部23は、次式(3)により、時刻毎の距離差dm,n[η]を算出する。
【0026】
【数3】
【0027】
式(3)において、nは、分割した領域mにおける基準点の番号(n=1,2,・・・,N)を示している。
【0028】
続いて、補償量決定部23は、ステップS3で算出された距離差dm,n[η]に基づいて、次式(4)により、位相補償量θ’m[η]を決定する(ステップS4)。
【0029】
【数4】
【0030】
式(4)は、nに関する距離差dm,n[η]の最大値と最小値との中間値に基づいて位相補償量を算出するものであるが、この他にも、nに関する距離差dm,n[η]の平均値に基づいて位相補償量を算出するもの等が考えられる。
【0031】
次に、補償処理部31は、各観測データについて、時刻ηに得られた信号に対して位相補償量θ’m[η]を乗算することにより、観測データの位相を補償する(ステップS5)。
続いて、再生処理部32は、位相補償された観測データに対して画像再生処理を実行し、画像を再生して(ステップS6)、図2の処理を終了する。
【0032】
この画像再生処理は、レンジドップラーアルゴリズム、ω−kアルゴリズム、チャープスケーリングアルゴリズム等、直線軌道を想定したアルゴリズムを用いて実行される。また、この実施の形態1では、画像再生処理の前に位相補償を実行する方法を示したが、これに限定されず、画像再生処理の一部であるレンジ圧縮処理の後等、画像再生処理中に位相補償を実行する方法も考えられる。
【0033】
なお、図2に示したフローチャートは、分割した領域の1つにおける画像を再生する処理を示したものなので、分割した各領域において図2に示したフローチャートの画像再生処理を実行し、必要に応じて再生された各画像を1枚に結合する処理を追加する。
【0034】
すなわち、位相補償に用いる基準点を複数、広範囲に設定することにより、1つの基準点に対して位相補償を実行する従来の動揺補償法と比較して、一度に画像再生される範囲を広くすることができる。また、画像化する領域の分割数を減らすことができるので、画像再生処理の効率を向上させることができる。さらに、画像化する領域の分割数を減らすことにより、振幅や位相の不連続部分を減らすことができる。
【0035】
以上のように、実施の形態1によれば、参照軌道算出部は、軌道データ格納部に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出し、複数基準点設定部は、地表上に、位相補償に用いられる複数の基準点を設定し、補償量決定部は、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定し、補償処理部は、位相補償量に基づいて、観測データ格納部に格納された観測データの位相を補償し、再生処理部は、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する。
そのため、画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる。
【0036】
実施の形態2.
上記実施の形態1では、任意に設定した複数の基準点を用いて位相補償を実行するものについて説明した。この実施の形態2では、これに加えて、分割する領域のサイズを自動調整することにより、分割する領域のサイズを設定することなく位相補償を実行することができる画像レーダ装置について説明する。
【0037】
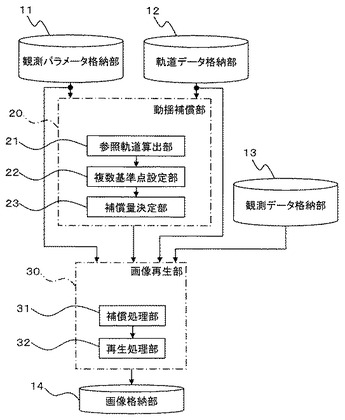
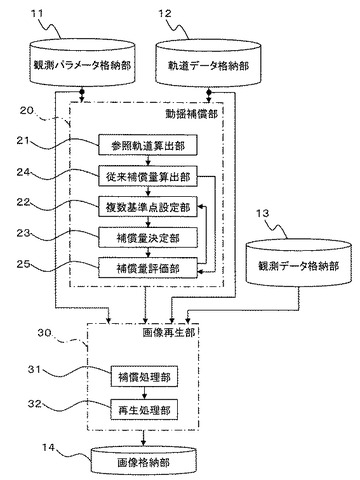
図4は、この発明の実施の形態2に係る画像レーダ装置を示すブロック構成図である。
図4において、この画像レーダ装置は、図1に示した画像レーダ装置に加えて、従来補償量算出部24と、補償量評価部25とを有している。なお、その他の構成および機能は、上述した実施の形態1と同様なので、説明を省略する。
【0038】
従来補償量算出部24は、上述した従来の動揺補償法による位相補償量を算出する。
補償量評価部25は、従来補償量算出部24で算出された位相補償量に基づいて補償量決定部23で決定された位相補償量を評価し、その位相補償量で観測データの位相を補償するか、または複数基準点設定部22で基準点の設定を変更し、再度位相補償量を算出するかを判断する。
【0039】
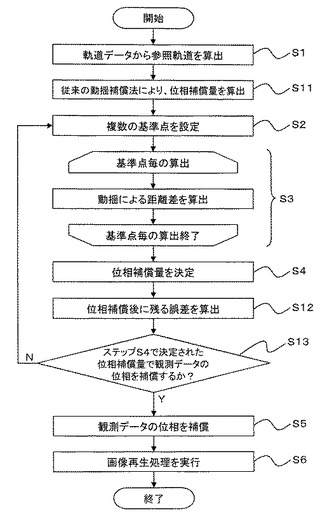
続いて、図5のフローチャートを参照しながら、この発明の実施の形態2に係る画像レーダ装置の動作について説明する。なお、上述した実施の形態1と同様の動作については、説明を省略する。
【0040】
ステップS1で参照軌道算出部21が参照軌道を算出した後、従来補償量算出部24は、1つの基準点を設定し、上述した従来の動揺補償法(式(1)、(2)参照)により、位相補償量θm[η]を算出する(ステップS11)。
【0041】
また、ステップS4で補償量決定部23が位相補償量θ’m[η]を決定した後、補償量評価部25は、この位相補償量θ’m[η]で観測データの位相を補償した場合に残る誤差ε’m,n[η]を、次式(5)により、基準点毎に算出する(ステップS12)。
【0042】
【数5】
【0043】
続いて、補償量評価部25は、ステップS4で決定された位相補償量θ’m[η]で観測データの位相を補償するか否かを判定する(ステップS13)。すなわち、ステップS4で決定された位相補償量θ’m[η]で観測データの位相を補償するか、または複数基準点設定部22で基準点の分布の範囲を変更し、再度位相補償量θ’m[η]を算出するかを判断する。また、補償量評価部25は、基準点の分布の範囲を広げるか、または狭めるかを決定する。
【0044】
具体的には、補償量評価部25は、まず、従来の動揺補償法による位相補償を実行した場合における各基準点nの位置での誤差εm,n[η]を、次式(6)により算出する。ただし、従来の動揺補償法による位相補償の基準点は、各基準点nの位置の中央付近に定める。
【0045】
【数6】
【0046】
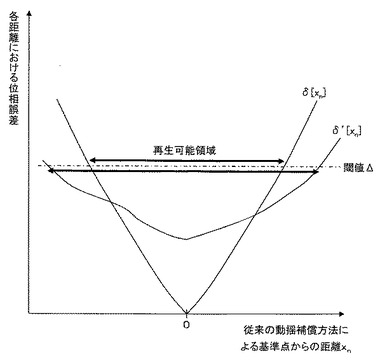
続いて、補償量評価部25は、各基準点nと従来の動揺補償法による位相補償の基準点との距離をxnとし、各距離xnにおける位相誤差δ[xn]およびδ’[xn]を算出する。位相誤差δ[xn]およびδ’[xn]は、それぞれ次式(7)および(8)で表される。
【0047】
【数7】
【0048】
【数8】
【0049】
式(7)、(8)は、誤差εm,n[η]および誤差ε’m,n[η]の最大値と最小値との差に基づいて位相誤差δ[xn]およびδ’[xn]を算出するものであるが、この他にも、誤差εm,n[η]および誤差ε’m,n[η]の分散に基づいて位相誤差δ[xn]およびδ’[xn]を算出するもの等が考えられる。
【0050】
ここで、この発明の実施の形態2に係る画像レーダ装置の距離xnと位相誤差δ[xn]およびδ’[xn]との関係を図6に示す。図6より、許容できる位相誤差の閾値をΔとすると、再生可能領域は、位相誤差δ[xn]およびδ’[xn]が閾値Δよりも小さくなる領域となる。
【0051】
そこで、補償量評価部25は、以下に示す条件1〜3の何れかに該当する場合には、複数基準点設定部22で基準点nを再設定し、再度位相補償量θ’m[η]を再度算出することとする(ステップS13でNoの場合)。
条件1:全てのnについてδ’[xn]<Δ
条件2:全てのnについてδ’[xn]>Δ
条件3:{δ’[xn]<Δとなるxnの幅}<{δ[xn]<Δとなるxnの幅}
【0052】
条件1に該当する場合、補償量評価部25は、基準点nの配置が広がる方向、すなわち距離xnの範囲が広がり、分割された領域が広くなるように基準点nを再設定する。また、条件2もしくは3に該当する場合、補償量評価部25は、基準点nの配置が狭まる方向、すなわち距離xnの範囲が狭まり、分割された領域が狭くなるように基準点nを再設定する。
【0053】
なお、距離は、空間における直線距離であってもよいし、それを成分分解したものであってもよい。例えば、参照軌道と同じ方向をアジマス軸と定め、それに直交する方向をレンジ軸と定めることにより、成分分解することができる。この場合には、成分(軸)毎に基準点位置を広げたり、狭めたりすることができる。
【0054】
また、位相誤差δ[xn]およびδ’[xn]を成分分解して、成分毎に評価することもできる。例えば、位相誤差δ[xn]およびδ’[xn]を二次多項式でフィッティングした場合の係数である二次成分、また同様に得られた三次成分の他、三角関数により成分分解し、成分毎に評価することができる。この場合、補償量評価部25は、成分毎に複数の閾値を設定し、全ての成分について上記条件1〜3の何れにも該当しないときに、ステップS4で決定された位相補償量θ’m[η]で観測データの位相を補償する。また、条件1〜3の何れかに該当する場合には、各成分で優先順位を付ける等して、基準点の分布範囲の拡大または縮小を決定する。
【0055】
以上のように、実施の形態2によれば、位相誤差δ[xn]およびδ’[xn]に基づいて、基準点の分布範囲を拡大または縮小することにより、分割する領域のサイズを自動で適切な範囲に設定することができる。そのため、画像再生処理の効率をさらに向上させることができる。
【符号の説明】
【0056】
11 観測パラメータ格納部、12 軌道データ格納部、13 観測データ格納部、14 画像格納部、20 動揺補償部、21 参照軌道算出部、22 複数基準点設定部、23 補償量決定部、24 従来補償量算出部、25 補償量評価部、30 画像再生部、31 補償処理部、32 再生処理部。
【技術分野】
【0001】
この発明は、航空機や人工衛星といった移動可能なプラットフォームに搭載されて、地表等を観測する画像レーダ装置に関し、特に、合成開口レーダを用いた画像レーダ装置に関する。
【背景技術】
【0002】
一般的に、合成開口レーダを用いた画像レーダ装置では、画像レーダ装置が搭載されたプラットフォームの軌道が直線であると仮定して画像が再生される。しかしながら、プラットフォームが航空機である場合には、風の影響等を受けるので、直線軌道を描くことは困難である。また、プラットフォームが人工衛星である場合には、地球を周回することとなるので、直線軌道ではなく円軌道となる。このように、プラットフォームの軌道が直線軌道から外れると、再生される画像にぼけが発生する。
【0003】
そこで、このような画像のぼけを防止する方法として、観測データの位相を補償する動揺補償法が知られている。この動揺補償法では、画像化する領域を分割した上で、各領域の中心点を位相補償の基準点と定め、領域毎に位相補償量を算出している(例えば、特許文献1参照)。
【0004】
ここで、実際のプラットフォームの軌道を実軌道と定義し、画像再生に用いられる直線軌道を参照軌道と定義すると、分割した領域m(m=1,2,・・・,M)における位相補償量θm[η]は、上記基準点と実軌道および参照軌道との距離差dm[η]を用いて、次式(1)で表される。なお、距離差dm[η]は、次式(2)で表される。
【0005】
【数1】
【0006】
【数2】
【0007】
式(2)において、Pi[η](ベクトル)は、時刻(slow time)ηにおける参照軌道上のプラットフォームの位置を示し、Pa[η](ベクトル)は、時刻ηにおける実軌道上のプラットフォームの位置を示し、Qm(ベクトル)は、分割した領域mの基準点の位置を示している。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−256058号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、従来技術には、以下のような課題がある。
従来の動揺補償法では、1つの基準点に対して位相補償を実行しているので、基準点から離れるほど、補償誤差が大きくなって画像がぼけるという問題がある。従来の動揺補償法では、この問題を解決するために、画像化する領域を分割しているが、その分割サイズは、分割された全ての領域において、補償誤差の大きさが基準値以下になるように設定される必要がある。
【0010】
そのため、従来の動揺補償法では、分割する領域のサイズを大きくすることができず、かつ分割した領域毎に画像再生処理を実行する必要があるので、画像再生処理の効率が低下するという問題がある。また、分割して再生した画像を1枚の画像に結合しても、分割した領域どうしの境界において、例えば画像の振幅や位相値がつながらず、不連続になるという問題もある。
【0011】
この発明は、上記のような課題を解決するためになされたものであり、基準点を複数設定することにより、画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる画像レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0012】
この発明に係る画像レーダ装置は、観測パラメータとして、少なくともレーダの送信波長を格納する観測パラメータ格納部と、レーダ観測時のプラットフォームの位置を時刻とともに格納する軌道データ格納部と、レーダ観測で得られた受信波のデータを格納する観測データ格納部と、軌道データ格納部に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部と、地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部と、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定する補償量決定部と、位相補償量に基づいて、観測データ格納部に格納された観測データの位相を補償する補償処理部と、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部と、を備えたものである。
【発明の効果】
【0013】
この発明に係る画像レーダ装置によれば、参照軌道算出部は、軌道データ格納部に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出し、複数基準点設定部は、地表上に、位相補償に用いられる複数の基準点を設定し、補償量決定部は、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定し、補償処理部は、位相補償量に基づいて、観測データ格納部に格納された観測データの位相を補償し、再生処理部は、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する。
そのため、画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる。
【図面の簡単な説明】
【0014】
【図1】この発明の実施の形態1に係る画像レーダ装置を示すブロック構成図である。
【図2】この発明の実施の形態1に係る画像レーダ装置の動作を示すフローチャートである。
【図3】この発明の実施の形態1に係る画像レーダ装置の実軌道および参照軌道と基準点との関係を示す説明図である。
【図4】この発明の実施の形態2に係る画像レーダ装置を示すブロック構成図である。
【図5】この発明の実施の形態2に係る画像レーダ装置の動作を示すフローチャートである。
【図6】この発明の実施の形態2に係る画像レーダ装置の従来の動揺補償法による基準点からの距離と位相誤差との関係を示す説明図である。
【発明を実施するための形態】
【0015】
以下、この発明の画像レーダ装置の好適な実施の形態につき図面を用いて説明するが、各図において同一、または相当する部分については、同一符号を付して説明する。
なお、以下の実施の形態では、移動可能なプラットフォームである航空機に、合成開口レーダを用いた画像レーダ装置が搭載されている場合について説明する。
【0016】
実施の形態1.
図1は、この発明の実施の形態1に係る画像レーダ装置を示すブロック構成図である。
図1において、この画像レーダ装置は、観測パラメータ格納部11、軌道データ格納部12、観測データ格納部13、画像格納部14、動揺補償部20および画像再生部30を備えている。
【0017】
観測パラメータ格納部11は、送信波長等の合成開口レーダ観測のパラメータを格納している。なお、観測パラメータ格納部11には、少なくとも送信波長が格納されている必要がある。
【0018】
軌道データ格納部12は、レーダ観測時のプラットフォームの位置や姿勢等の情報を格納している。ここで、プラットフォームの位置を記録するための座標系は、地球重心座標系や緯度・経度・高度等の全世界的な座標系であってもよいし、プラットフォームを基準とした航法座標系等の局所的な座標系であってもよい。
【0019】
観測データ格納部13は、レーダ観測で得られた受信波のデータを格納する。このデータの形式は、レーダ装置の受信アンテナで得られた受信波の電界強度をそのまま記録したものであってもよいし、位相検波処理により、実数として記録されている信号を複素数にしたものであってもよい。また、パルス変調を利用して、実際よりも短いパルスに圧縮したパルス圧縮処理後のデータであってもよい。
【0020】
動揺補償部20は、位相補償量を算出する部分であり、参照軌道算出部21、複数基準点設定部22および補償量決定部23を有している。
参照軌道算出部21は、実軌道から参照軌道を算出する。複数基準点設定部22は、位相補償に用いられる複数の基準点を設定する。補償量決定部23は、補償する位相量を決定する。
【0021】
画像再生部30は、画像再生処理を実行する部分であり、補償処理部31および再生処理部32を有している。
補償処理部31は、補償量決定部23で決定された位相補償量に基づいて、観測データの位相を補償する。再生処理部32は、位相補償された観測データに対して画像再生処理を実行する。なお、再生処理部32で再生された画像は、画像格納部14に格納される。
【0022】
続いて、図2のフローチャートを参照しながら、この発明の実施の形態1に係る画像レーダ装置の動作について説明する。
まず、参照軌道算出部21は、軌道データ格納部12に格納された軌道データ、すなわち実軌道に基づいて、参照軌道を算出する(ステップS1)。
【0023】
ここで、参照軌道を算出方法するに際して、実軌道の全部または一部について移動速度や位置を平均し、プラットフォームが等速直線運動しているとしてもよいし、画像再生に用いられる実効速度、すなわち実軌道の速度でなく、観測地点とプラットフォームとの間の距離変化を多項式でフィッティングして得られる速度で、プラットフォームが運動しているとしてもよい。
【0024】
続いて、複数基準点設定部22は、位相補償に用いられる複数の基準点を設定する(ステップS2)。
この基準点は、複数かつ画像化する全ての領域にわたって配置される。配置の形状は、格子状であってもよいし、同心円状であってもよいし、任意に設定することができる。
【0025】
次に、補償量決定部23は、時刻毎に動揺による実軌道および参照軌道と基準点との距離差を算出する(ステップS3)。なお、このステップS3の処理は、全ての基準点について、基準点毎に実行される。この発明の実施の形態1に係る画像レーダ装置の実軌道および参照軌道と基準点との関係を図3に例示する。
具体的には、補償量決定部23は、次式(3)により、時刻毎の距離差dm,n[η]を算出する。
【0026】
【数3】
【0027】
式(3)において、nは、分割した領域mにおける基準点の番号(n=1,2,・・・,N)を示している。
【0028】
続いて、補償量決定部23は、ステップS3で算出された距離差dm,n[η]に基づいて、次式(4)により、位相補償量θ’m[η]を決定する(ステップS4)。
【0029】
【数4】
【0030】
式(4)は、nに関する距離差dm,n[η]の最大値と最小値との中間値に基づいて位相補償量を算出するものであるが、この他にも、nに関する距離差dm,n[η]の平均値に基づいて位相補償量を算出するもの等が考えられる。
【0031】
次に、補償処理部31は、各観測データについて、時刻ηに得られた信号に対して位相補償量θ’m[η]を乗算することにより、観測データの位相を補償する(ステップS5)。
続いて、再生処理部32は、位相補償された観測データに対して画像再生処理を実行し、画像を再生して(ステップS6)、図2の処理を終了する。
【0032】
この画像再生処理は、レンジドップラーアルゴリズム、ω−kアルゴリズム、チャープスケーリングアルゴリズム等、直線軌道を想定したアルゴリズムを用いて実行される。また、この実施の形態1では、画像再生処理の前に位相補償を実行する方法を示したが、これに限定されず、画像再生処理の一部であるレンジ圧縮処理の後等、画像再生処理中に位相補償を実行する方法も考えられる。
【0033】
なお、図2に示したフローチャートは、分割した領域の1つにおける画像を再生する処理を示したものなので、分割した各領域において図2に示したフローチャートの画像再生処理を実行し、必要に応じて再生された各画像を1枚に結合する処理を追加する。
【0034】
すなわち、位相補償に用いる基準点を複数、広範囲に設定することにより、1つの基準点に対して位相補償を実行する従来の動揺補償法と比較して、一度に画像再生される範囲を広くすることができる。また、画像化する領域の分割数を減らすことができるので、画像再生処理の効率を向上させることができる。さらに、画像化する領域の分割数を減らすことにより、振幅や位相の不連続部分を減らすことができる。
【0035】
以上のように、実施の形態1によれば、参照軌道算出部は、軌道データ格納部に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出し、複数基準点設定部は、地表上に、位相補償に用いられる複数の基準点を設定し、補償量決定部は、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定し、補償処理部は、位相補償量に基づいて、観測データ格納部に格納された観測データの位相を補償し、再生処理部は、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する。
そのため、画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる。
【0036】
実施の形態2.
上記実施の形態1では、任意に設定した複数の基準点を用いて位相補償を実行するものについて説明した。この実施の形態2では、これに加えて、分割する領域のサイズを自動調整することにより、分割する領域のサイズを設定することなく位相補償を実行することができる画像レーダ装置について説明する。
【0037】
図4は、この発明の実施の形態2に係る画像レーダ装置を示すブロック構成図である。
図4において、この画像レーダ装置は、図1に示した画像レーダ装置に加えて、従来補償量算出部24と、補償量評価部25とを有している。なお、その他の構成および機能は、上述した実施の形態1と同様なので、説明を省略する。
【0038】
従来補償量算出部24は、上述した従来の動揺補償法による位相補償量を算出する。
補償量評価部25は、従来補償量算出部24で算出された位相補償量に基づいて補償量決定部23で決定された位相補償量を評価し、その位相補償量で観測データの位相を補償するか、または複数基準点設定部22で基準点の設定を変更し、再度位相補償量を算出するかを判断する。
【0039】
続いて、図5のフローチャートを参照しながら、この発明の実施の形態2に係る画像レーダ装置の動作について説明する。なお、上述した実施の形態1と同様の動作については、説明を省略する。
【0040】
ステップS1で参照軌道算出部21が参照軌道を算出した後、従来補償量算出部24は、1つの基準点を設定し、上述した従来の動揺補償法(式(1)、(2)参照)により、位相補償量θm[η]を算出する(ステップS11)。
【0041】
また、ステップS4で補償量決定部23が位相補償量θ’m[η]を決定した後、補償量評価部25は、この位相補償量θ’m[η]で観測データの位相を補償した場合に残る誤差ε’m,n[η]を、次式(5)により、基準点毎に算出する(ステップS12)。
【0042】
【数5】
【0043】
続いて、補償量評価部25は、ステップS4で決定された位相補償量θ’m[η]で観測データの位相を補償するか否かを判定する(ステップS13)。すなわち、ステップS4で決定された位相補償量θ’m[η]で観測データの位相を補償するか、または複数基準点設定部22で基準点の分布の範囲を変更し、再度位相補償量θ’m[η]を算出するかを判断する。また、補償量評価部25は、基準点の分布の範囲を広げるか、または狭めるかを決定する。
【0044】
具体的には、補償量評価部25は、まず、従来の動揺補償法による位相補償を実行した場合における各基準点nの位置での誤差εm,n[η]を、次式(6)により算出する。ただし、従来の動揺補償法による位相補償の基準点は、各基準点nの位置の中央付近に定める。
【0045】
【数6】
【0046】
続いて、補償量評価部25は、各基準点nと従来の動揺補償法による位相補償の基準点との距離をxnとし、各距離xnにおける位相誤差δ[xn]およびδ’[xn]を算出する。位相誤差δ[xn]およびδ’[xn]は、それぞれ次式(7)および(8)で表される。
【0047】
【数7】
【0048】
【数8】
【0049】
式(7)、(8)は、誤差εm,n[η]および誤差ε’m,n[η]の最大値と最小値との差に基づいて位相誤差δ[xn]およびδ’[xn]を算出するものであるが、この他にも、誤差εm,n[η]および誤差ε’m,n[η]の分散に基づいて位相誤差δ[xn]およびδ’[xn]を算出するもの等が考えられる。
【0050】
ここで、この発明の実施の形態2に係る画像レーダ装置の距離xnと位相誤差δ[xn]およびδ’[xn]との関係を図6に示す。図6より、許容できる位相誤差の閾値をΔとすると、再生可能領域は、位相誤差δ[xn]およびδ’[xn]が閾値Δよりも小さくなる領域となる。
【0051】
そこで、補償量評価部25は、以下に示す条件1〜3の何れかに該当する場合には、複数基準点設定部22で基準点nを再設定し、再度位相補償量θ’m[η]を再度算出することとする(ステップS13でNoの場合)。
条件1:全てのnについてδ’[xn]<Δ
条件2:全てのnについてδ’[xn]>Δ
条件3:{δ’[xn]<Δとなるxnの幅}<{δ[xn]<Δとなるxnの幅}
【0052】
条件1に該当する場合、補償量評価部25は、基準点nの配置が広がる方向、すなわち距離xnの範囲が広がり、分割された領域が広くなるように基準点nを再設定する。また、条件2もしくは3に該当する場合、補償量評価部25は、基準点nの配置が狭まる方向、すなわち距離xnの範囲が狭まり、分割された領域が狭くなるように基準点nを再設定する。
【0053】
なお、距離は、空間における直線距離であってもよいし、それを成分分解したものであってもよい。例えば、参照軌道と同じ方向をアジマス軸と定め、それに直交する方向をレンジ軸と定めることにより、成分分解することができる。この場合には、成分(軸)毎に基準点位置を広げたり、狭めたりすることができる。
【0054】
また、位相誤差δ[xn]およびδ’[xn]を成分分解して、成分毎に評価することもできる。例えば、位相誤差δ[xn]およびδ’[xn]を二次多項式でフィッティングした場合の係数である二次成分、また同様に得られた三次成分の他、三角関数により成分分解し、成分毎に評価することができる。この場合、補償量評価部25は、成分毎に複数の閾値を設定し、全ての成分について上記条件1〜3の何れにも該当しないときに、ステップS4で決定された位相補償量θ’m[η]で観測データの位相を補償する。また、条件1〜3の何れかに該当する場合には、各成分で優先順位を付ける等して、基準点の分布範囲の拡大または縮小を決定する。
【0055】
以上のように、実施の形態2によれば、位相誤差δ[xn]およびδ’[xn]に基づいて、基準点の分布範囲を拡大または縮小することにより、分割する領域のサイズを自動で適切な範囲に設定することができる。そのため、画像再生処理の効率をさらに向上させることができる。
【符号の説明】
【0056】
11 観測パラメータ格納部、12 軌道データ格納部、13 観測データ格納部、14 画像格納部、20 動揺補償部、21 参照軌道算出部、22 複数基準点設定部、23 補償量決定部、24 従来補償量算出部、25 補償量評価部、30 画像再生部、31 補償処理部、32 再生処理部。
【特許請求の範囲】
【請求項1】
観測パラメータとして、少なくともレーダの送信波長を格納する観測パラメータ格納部と、
レーダ観測時のプラットフォームの位置を時刻とともに格納する軌道データ格納部と、
レーダ観測で得られた受信波のデータを格納する観測データ格納部と、
前記軌道データ格納部に格納された前記プラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部と、
地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部と、
前記実軌道および前記参照軌道と各基準点との距離差に基づいて、位相補償量を決定する補償量決定部と、
前記位相補償量に基づいて、前記観測データ格納部に格納された観測データの位相を補償する補償処理部と、
位相補償後の前記観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部と、
を備えたことを特徴とする画像レーダ装置。
【請求項2】
前記補償量決定部で決定された前記位相補償量を評価し、前記位相補償量を用いて前記観測データの位相を補償するか、または前記複数基準点設定部で前記基準点の設定を変更し、再度前記位相補償量を算出するかを判断する補償量評価部をさらに備えたことを特徴とする請求項1に記載の画像レーダ装置。
【請求項3】
地表上に、1つの基準点のみを設定し、前記実軌道および前記参照軌道と前記1つの基準点との距離差に基づいて、前記位相補償量を算出する従来補償量算出部をさらに備えたことを特徴とする請求項2に記載の画像レーダ装置。
【請求項4】
前記補償量評価部は、前記実軌道および前記参照軌道と前記1つの基準点との距離差と、位相補償の取り残し誤差との関係に基づいて、前記位相補償量を評価することを特徴とする請求項3に記載の画像レーダ装置。
【請求項5】
前記補償量決定部は、前記プラットフォームの位置毎に、各基準点との距離差を算出し、算出された距離差の最大値と最小値との中間値に基づいて位相補償量を算出することを特徴とする請求項1から請求項4までの何れか1項に記載の画像レーダ装置。
【請求項6】
前記補償量決定部は、前記プラットフォームの位置毎に、各基準点との距離差を算出し、算出された距離差の平均値に基づいて位相補償量を算出することを特徴とする請求項1から請求項4までの何れか1項に記載の画像レーダ装置。
【請求項7】
前記再生処理部が再生したレーダ画像を格納する画像格納部をさらに備えたことを特徴とする請求項1から請求項6までの何れか1項に記載の画像レーダ装置。
【請求項1】
観測パラメータとして、少なくともレーダの送信波長を格納する観測パラメータ格納部と、
レーダ観測時のプラットフォームの位置を時刻とともに格納する軌道データ格納部と、
レーダ観測で得られた受信波のデータを格納する観測データ格納部と、
前記軌道データ格納部に格納された前記プラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部と、
地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部と、
前記実軌道および前記参照軌道と各基準点との距離差に基づいて、位相補償量を決定する補償量決定部と、
前記位相補償量に基づいて、前記観測データ格納部に格納された観測データの位相を補償する補償処理部と、
位相補償後の前記観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部と、
を備えたことを特徴とする画像レーダ装置。
【請求項2】
前記補償量決定部で決定された前記位相補償量を評価し、前記位相補償量を用いて前記観測データの位相を補償するか、または前記複数基準点設定部で前記基準点の設定を変更し、再度前記位相補償量を算出するかを判断する補償量評価部をさらに備えたことを特徴とする請求項1に記載の画像レーダ装置。
【請求項3】
地表上に、1つの基準点のみを設定し、前記実軌道および前記参照軌道と前記1つの基準点との距離差に基づいて、前記位相補償量を算出する従来補償量算出部をさらに備えたことを特徴とする請求項2に記載の画像レーダ装置。
【請求項4】
前記補償量評価部は、前記実軌道および前記参照軌道と前記1つの基準点との距離差と、位相補償の取り残し誤差との関係に基づいて、前記位相補償量を評価することを特徴とする請求項3に記載の画像レーダ装置。
【請求項5】
前記補償量決定部は、前記プラットフォームの位置毎に、各基準点との距離差を算出し、算出された距離差の最大値と最小値との中間値に基づいて位相補償量を算出することを特徴とする請求項1から請求項4までの何れか1項に記載の画像レーダ装置。
【請求項6】
前記補償量決定部は、前記プラットフォームの位置毎に、各基準点との距離差を算出し、算出された距離差の平均値に基づいて位相補償量を算出することを特徴とする請求項1から請求項4までの何れか1項に記載の画像レーダ装置。
【請求項7】
前記再生処理部が再生したレーダ画像を格納する画像格納部をさらに備えたことを特徴とする請求項1から請求項6までの何れか1項に記載の画像レーダ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−237195(P2011−237195A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−106579(P2010−106579)
【出願日】平成22年5月6日(2010.5.6)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月6日(2010.5.6)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]