
画像上地物計測用の基準尺
【課題】画像上地物計測における教師線生成用として、扱い性や教師線生成に関する作業性に優れ、しかもより精度の高い教師線の生成を可能とする基準尺を提供する。
【解決手段】本発明の基準尺31は、カメラで撮影して得られる画像上で当該画像に取り込まれている地物の計測を画像上での消失点に基づいてなす画像上地物計測にあって、画像上で絶対長さが既知となる教師線を消失点に基づく計測のために生成させるのに用いられ、地物計測用の画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するようにそれぞれが組み合わされ、かつそれぞれに既知となる絶対長さを示す目盛りが設けられたX方向尺32、Y方向尺33及びZ方向尺34を備えてなる。
【解決手段】本発明の基準尺31は、カメラで撮影して得られる画像上で当該画像に取り込まれている地物の計測を画像上での消失点に基づいてなす画像上地物計測にあって、画像上で絶対長さが既知となる教師線を消失点に基づく計測のために生成させるのに用いられ、地物計測用の画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するようにそれぞれが組み合わされ、かつそれぞれに既知となる絶対長さを示す目盛りが設けられたX方向尺32、Y方向尺33及びZ方向尺34を備えてなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カメラで撮影して得られる画像上で当該画像に取り込まれている地物について計測をなす画像上地物計測で用いる基準尺に関する。
【背景技術】
【0002】
デジタル方式のカメラによる撮影で得られる画像(画像データ)を利用する技術の一つとして、画像上地物計測がある。画像上地物計測では、カメラによる画像上で当該画像に取り込まれている建造物や道路などの様々な地物について、幅、高さ、奥行きなどを計測する。こうした画像上地物計測については、ここで仮に消失点方式と呼ぶ計測手法が知られている(特許文献1)。消失点方式の画像上地物計測では、画像上の消失点に基づいて画像上での地物計測を行う。具体的には、画像に取り込まれている適宜な地物の輪郭を用いて消失点を先ず求める。それからその消失点に基づいて計測対象の地物の所望計測部位における1画素あたりの体現長さを求め、その1画素あたりの体現長さに基づいて画像上での地物計測を行う。
【0003】
このような消失点方式の画像上地物計測では、画像上での絶対長さが既知となる教師線を用いることで、より効率的に計測を行うことが可能となる。すなわち、教師線を用いる手法では、地物計測用の画像中に教師線を生成させ、そして計測対象の画像上の地物の所望計測部位に対して指定した計測線と教師線を、消失点に対する計測線と教師線の相対的位置関係の下で、それぞれの画素数について比較することで計測を行うことができ、したがって計測のための処理負担を大幅に軽減でき、より効率的に計測を行うことが可能となる。この場合の教師線は、地物計測用画像の被写体空間における3次元座標のX、Y、Zの各座標軸について生成させる。つまりX軸方向教師線、Y軸方向教師線及びZ軸方向教師線の各教師線として生成させる。これらの教師線について特許文献1では、長さが既知の線状体、つまり基準尺を画像に取り込ませ、その基準尺の像として生成させるものとし、長さが既知の基準尺として測量用ポールを用いる場合を記述している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−229182号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のように、消失点方式の画像上地物計測では、教師線を用いることで計測をより効率的に行うことが可能となる。ただ、教師線による計測効率をより実際的なものとするには、地物計測用の画像中への教師線の生成に課題が残されている。すなわち、従来では教師線を地物計測用の画像中に生成させるのに測量用ポールを画像に取り込ませるようにしていた。測量用ポールは、2m以上の長さを有しているのが通常である。したがって、地物計測用画像の被写体空間における3次元座標のX、Y、Zの各座標軸について教師線を生成させるためには、2m以上の測量用ポールを3本用い、それらを3次元座標的に画像に取り込ませる作業が必要となる。このことは地物計測用の画像の撮影に伴う作業負担を大きなものとし、その結果、教師線を用いることによる計測効率の向上という実を得られないことになってしまう。つまり、教師線生成用の基準尺として測量用ポールを用いる方法では、基準尺の扱い性や教師線生成に関する作業性という点で課題を残しており、このことで教師線を用いることによる計測効率の向上という実を得られないことになっていたということである。
【0006】
また測量用ポールで教師線を生成させる方法には、教師線における1画素あたりの体現長さの精度についての課題もある。教師線を用いる手法では、教師線の1画素あたりの体現長さを基にして地物の所望計測部位における1画素あたりの体現長さを求めることになる。このため教師線の1画素あたりの体現長さの精度が地物計測の精度に直結することになる。したがって、教師線については、その1画素あたりの体現長さにできるだけ高い精度を得られるようにすることが望まれることになる。しかるに、測量用ポールは、長さについての目盛りの単位が20cmとされているのが通常で、上記のような教師線に対する要求に必ずしも十分に応えることができない。
【0007】
本発明は、以上のような事情を背景にしてなされたものであり、その課題は、画像上地物計測における教師線生成用として、扱い性や教師線生成に関する作業性に優れ、しかもより精度の高い教師線の生成を可能とする基準尺を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために第1の発明では、カメラで撮影して得られる画像上で当該画像に取り込まれている地物の計測を前記画像上で求められる消失点に基づいてなす画像上地物計測にあって、前記画像上で絶対長さが既知となる教師線を前記消失点に基づく計測のために生成させるのに用いられる画像上地物計測用の基準尺において、前記画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するようにそれぞれが組み合わされ、かつそれぞれに前記既知となる絶対長さを示す目盛りが設けられたX方向尺、Y方向尺及びZ方向尺を備えてなることを特徴としている。
【0009】
このような第1の発明による基準尺は、その扱いが容易で教師線生成に関する作業性にも優れる。すなわち第1の発明による基準尺は、地物計測用画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応するように組み合わされたX、Y、Zの各方向尺を備えている。このため、例えば道路沿いの地物について計測を行う場合であれば、基準尺を適宜な配置で地物計測用の画像に取り込めるように道路上に置いて道路沿いの画像を撮影するだけで済み、扱いがきわめて容易で教師線生成に関する作業性にも優れる。
【0010】
また第1の発明による基準尺は、X、Y、Zの各方向尺に長さ目盛りが設けられている。そしてその長さ目盛りについては、例えば大きな目盛りとして10cm単位の目盛り、中間の目盛りとして5cm単位の目盛り、そして細かい目盛りとして1cm単位の目盛りを設けることができ、このような目盛り構造とすることで、1画素あたりの体現長さについての精度がより高い教師線の生成が可能となる。
【0011】
また第2の発明では、上記のような基準尺について、前記X方向尺、Y方向尺及びZ方向尺が折り畳み可能に組み合わされていることを特徴としている。
【0012】
画像上地物計測では、様々な場所に出向いて地物計測用画像の撮影を行うことになり、その際には基準尺を携行することになる。そのため基準尺には携行性に優れていることが求められることになる。これについて、第2の発明による基準尺は、X、Y、Zの各方向尺が折り畳み可能に組み合わされていることから、コンパクトに折り畳んだ状態で携行することができ、優れた携行性要求に応えることができる。
【0013】
また第3の発明では、上記のような基準尺について、前記X方向尺、Y方向尺及びZ方向尺は、それぞれ4つの側面を有するように形成されるとともに、前記4つの側面の内の少なくとも3つの側面に前記目盛りが設けられていることを特徴としている。
【0014】
このような第3の発明の基準尺では、X、Y、Zの各方向尺それぞれの3つの側面に目盛りが設けられているので、地物計測用の画像に取り込ませる際の基準尺の向きについて自由度が高まり、またX、Y、Zの各方向尺における目盛りに基づく1画素あたりの体現長さの算出をより容易に行うことが可能となる。
【発明の効果】
【0015】
以上のような本発明によれば、画像上地物計測における教師線生成用として、扱い性や教師線生成に関する作業性に優れ、しかもより精度の高い教師線の生成を可能とする基準尺が得られる。
【図面の簡単な説明】
【0016】
【図1】一実施例による基準尺の展開状態での構成を簡略化して示す図である。
【図2】一実施例による基準尺の折り畳み状態での構成を簡略化して示す図である。
【図3】画像上地物計測で用いる地物データ取得システムの構成を示す図である。
【図4】画像上地物計測処理の流れを示す図である。
【図5】道路側線や計測線の指定について説明する図である。
【図6】被写体空間における3次元座標の例を示す図である。
【図7】計測線のX軸成分の算出についての原理を説明する図である。
【図8】計測線のY軸成分の算出についての原理を説明する図である。
【図9】計測線のZ軸成分の算出についての原理を説明する図である。
【図10】計測領域の例を示す図である。
【図11】地物データ付き画像データの例を示す図である。
【発明を実施するための形態】
【実施例】
【0017】
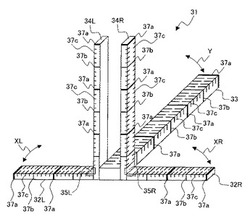
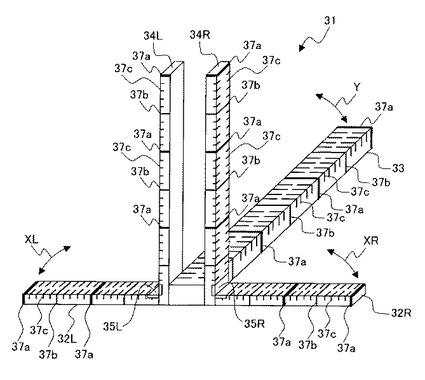
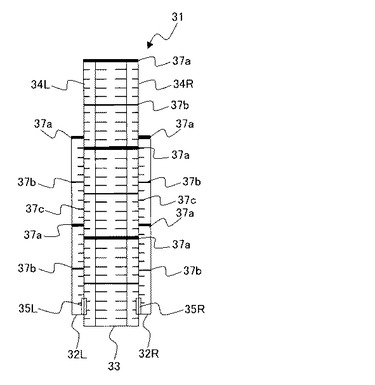
図1と図2に、一実施例による画像上地物計測用の基準尺の構成を簡略化して示す。図1は使用時の展開状態を示し、図2は非使用時の折り畳み状態を示している。図1に示すように、本実施例の基準尺31は、X方向尺32、Y方向尺33及びZ方向尺34を備えており、X方向尺32については左右一対となる左側X方向尺32Lと右側X方向尺32Rとして形成され、またZ方向尺34についても左右一対となる左側Z方向尺34Lと右側Z方向尺34Rとして形成されている。
【0018】
これらX、Y、Zの各方向尺32、33、34は、十分な剛性を有し、かつ軽量である材料、例えばアルミ角パイプ材を用いて4つの側面を有する角棒状に形成されており、後述するような地物計測用の画像4(図5)の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するように互いが組み合わされ、かつ折り畳み可能に組み合わされている。より具体的には、左側X方向尺32Lと左側Z方向尺34Lをそれぞれの基端部においてヒンジ部35Lで左側X方向尺32Lに矢印XLの如き回動を可能とするように接続して左側X・Z方向尺ユニット36Lを形成するとともに、右側X方向尺32Rと右側Z方向尺34Rをそれぞれの基端部においてヒンジ部35Rで右側X方向尺32Rに矢印XRの如き回動を可能とするように接続して右側X・Z方向尺ユニット36Rを形成し、これら左側X・Z方向尺ユニット36Lと右側X・Z方向尺ユニット36Rをそれぞれの基端部でY方向尺33の基端部に図示を省略のヒンジ構造で接続し、Y方向尺33に矢印Yの如き回動を可能とするようにされている。そしてこうした接続構造における左側X方向尺32Lの矢印XLの回動、右側X方向尺32Rの矢印XRの回動、及びY方向尺33の矢印Yの回動により、折り畳んで図2に示すような折り畳み状態をとらせることができるようにされている。
【0019】
またX、Y、Zの各方向尺32、33、34は、後述のようにして画像4上に生成させる教師線(図6の教師線LTx、LTy、LTz)にその絶対長さを与えるための目盛り37がそれぞれに設けられている。目盛り37は、10cm単位の大目盛り37a、5cm単位の中目盛り37b、及び1cm単位の小目盛り37cとして設けられており、X、Y、Zの各方向尺32、33、34それぞれの4つの側面の内の3つの側面に設けられている。
【0020】
ここで、Y方向尺33とZ方向尺34は、その長さがほぼ30cm程度とされ、X方向尺32は、左側X方向尺32Lと右側X方向尺32Rがそれぞれ20cm程度の長さとされ、全体で40cm程度の長さとなるようにされている。こうした基準尺31におけるX、Y、Zの各方向尺32、33、34の長さサイズは、測量用ポールに較べて大幅に短いといえる。すなわち基準尺31では、X、Y、Zの各方向尺32、33、34の長さサイズを30cm〜40cm程度で済ませることができ、これによりコンパクト化が図られているということである。これは、様々な実験を繰り返して得られた知見、つまり基準尺31における上記のような構造、特に目盛り37に関する上記のような構造とすることで、X、Y、Zの各方向尺32、33、34の長さが30cm〜40cm程度でも十分に精度の高い教師線の生成が可能であるという知見によるものである。
【0021】
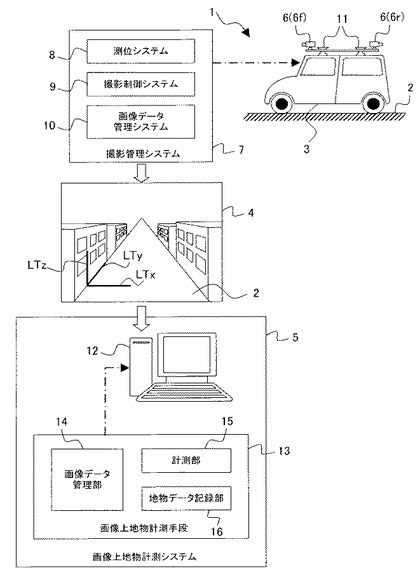
以下では以上のような基準尺31が適用される画像上地物計測の例について説明する。図3に、一例による画像上地物計測で用いる地物データ取得システム1の構成を示す。本例における地物データ取得システム1は、道路2で撮影車両3を走行させながら画像として道路沿い画像4を取得し、その道路沿い画像4における地物について計測を行って地物データを得る場合であり、撮影車両3と画像上地物計測システム5からなる。
【0022】
撮影車両3は、例えば幅員が4m以下であるような狭い道路が錯綜する市街地でも走行可能な車両にデジタル方式のカメラ6と撮影管理システム7を搭載して構成されている。
【0023】
カメラ6は、デジタル式のスチールカメラまたはビデオカメラであり、通常はスチールカメラが用いられ、前方撮影用カメラ6fと後方撮影用カメラ6rとして2台が搭載される。前方撮影用カメラ6fは、撮影車両3の走行方向前方を走行方向に光軸が沿った状態で撮影を行い、後方撮影用カメラ6rは、撮影車両3の走行方向後方を走行方向に光軸が沿った状態で撮影を行う。これら前方撮影用カメラ6fや後方撮影用カメラ6rによる撮影で得られる道路沿い画像4は、光軸方向に延びている状態で道路を取り込んだ画像となる。このように走行方向前方と後方のそれぞれについて撮影できるようにするのは、撮影車両3の走行方向によっては前方撮影用カメラ6fが逆光になる場合があることから、そのような場合に対応できるようにするためである。
【0024】
撮影管理システム7は、測位システム8、撮影制御システム9、および画像データ管理システム10の各サブシステムを含んでなる。測位システム8は、撮影車両3の現在位置と走行方向、より具体的にはカメラ6の光軸方向についての情報である位置方位情報を例えば走行距離1mごとにといった間隔で取得するのに機能する。そのために測位システム8は、GPS(全地球測位システム)と距離/慣性計測システムを組み合わせて構成される。GPSは、撮影車両3の前後に設けた2つのGPSアンテナ11により衛星からの信号を受信することで位置方位情報を取得する。一方、距離/慣性計測システムは、撮影車両3の走行方向や車両の水平面に対する傾きをジャイロにより検出する慣性計測器と撮影車両3の走行距離を検出する距離計測器からなり、これらにより位置方位情報を取得する。
【0025】
撮影制御システム9は、一定距離間隔で道路沿い画像4を取得できるような制御としてカメラ6による撮影を制御する。具体的には、撮影車両3の走行距離をカウントし、例えば5mといった一定の走行距離ごとに撮影指令を出力してカメラ6に撮影を行わせる。こうした撮影により、撮影車両3が走行する道路に沿った一定距離間隔による一連の道路沿い画像を取得することができる。
【0026】
画像データ管理システム10は、ワークステーションレベルのデータ処理装置を用いて構成され、カメラ6による撮影で取得された道路沿い画像4のデータを管理する。その管理は、道路沿い画像4をその撮影時の位置方位情報と関連させるようにしてなされる。
【0027】
ここで、道路沿い画像4には、後述のような画像上地物計測処理に必要な教師線LTを生成させるようにする。教師線LTは、道路沿い画像4中の道路2の側線(これは後述のように消失点を求めるための地物の輪郭として用いられる)に沿う方向を1つの座標軸とした道路沿い画像4の被写体空間における3次元座標(X、Y、Z座標)の各座標軸について生成させる。つまりX軸方向の教師線LTx、Y軸方向の教師線LTy、Z軸方向の教師線LTzとして生成させる。これらの教師線LTx、LTy、LTzは、上述の基準尺31を道路沿い画像4に取り込ませることで、基準尺31におけるX、Y、Zの各方向尺32、33、34の像に基づいて生成させる。このような教師線LTは、原理的にいえば、道路沿い画像を同一の撮影条件で撮影する範囲については、その撮影条件で最初に撮影する道路沿い画像にだけ生成させることで足りる。ただ実際的には、例えば1日の撮影作業の最初に撮影する道路沿い画像ごとに教師線用の線状体を写し込ませて教師線を生成させるようにするのが好ましい。これは、撮影車両3へのカメラ6のセット状態が撮影条件に影響し、そのセット状態が1日の撮影作業ごとに微妙に異なる可能性があるからである。
【0028】
画像上地物計測システム5は、データ処理装置12にコンピュータプログラムとして構成される画像上地物計測手段13を搭載して構成される。画像上地物計測手段13は、画像データ管理システム10から取り込んだ道路沿い画像4のデータや道路沿い画像4に地物データを記録した後述のような地物データ付き道路沿い画像を管理する画像データ管理部14、道路沿い画像4に取り込まれている地物について計測して地物データを取得する計測部15、および計測部15が取得した地物データを道路沿い画像4に記録して地物データ付き道路沿い画像を生成させる地物データ記録部16を含んでいる。
【0029】
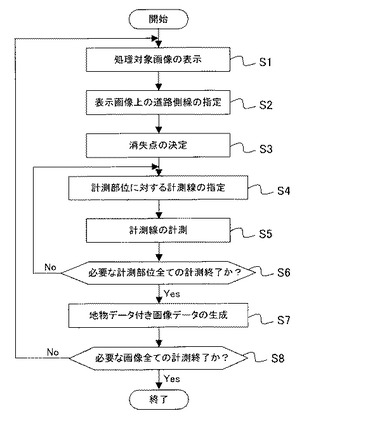
以下では画像上地物計測システム5でなされる画像上地物計測処理の例について説明する。本例における画像上地物計測処理は、道路沿い画像4における道路2の側線を地物の輪郭として用いて消失点を求める場合であり、図4にその流れを示すように、ステップS1〜ステップS8の各処理過程を含む。
【0030】
まずステップS1で処理対象画像の表示処理がなされる。処理対象画像の表示処理は、計測対象の道路沿い画像をデータ処理装置12の表示画面に表示する処理で、ユーザによる指定を受けて行うか、あるいは一連の道路沿い画像を順次的に表示するようにして行われる。
【0031】
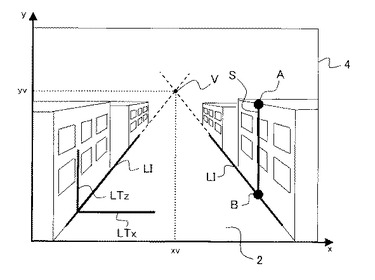
ステップS2では、道路側線の指定を行う。具体的には、ステップS1で表示した道路沿い画像について道路の側線をユーザが指定する。その指定は、例えば図5に示すようにして行う。具体的には、表示画面に表示されている道路沿い画像4における道路2の側線を左右で対応する直線部分のそれぞれについて描画機能によりなぞるようにして2本の指定線LI、LIを描線することで行う。
【0032】
ステップS3では、消失点の決定処理がなされる。道路2の側線を用いて消失点を求める場合、消失点は2本の指定線LI、LIの交点Vとなる。したがって消失点の特定は、交点Vの道路沿い画像4上での位置を求めることで行う。具体的には、道路沿い画像4の横方向(道路沿い画像4の被写体空間における横方向に対応)をx軸とし、縦方向をy軸とする画像上2次元座標を道路沿い画像4に設定し、その画像上2次元座標における座標値(xv,yv)として交点Vの道路沿い画像4上での位置を求め、それを消失点とする。なお、図5では、x軸がX軸方向の教師線LTxと平行になるように画像上2次元座標を設定する場合としてある。
【0033】
ステップS4では、計測部位に対する計測線の指定処理がなされる。この処理は、図5に示す例のように、描画機能により計測部位に計測線Sを描線することで行うか、または計測部位の両端に端点A、Bを指定することで行う。
【0034】
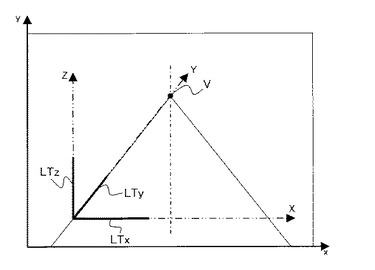
ステップS5では、ステップS4で指定の計測線の計測処理がなされる。この計測処理は、図6に示す例のような道路沿い画像の被写体空間における3次元座標を前提にして行う。ここでは3次元座標について横方向をX軸、奥行き方向をY軸、縦方向をZ軸とする。このような3次元座標を前提にする場合、計測線は、それが道路沿い画像上でとる姿勢に応じて、X、Y、Zの各軸方向の成分の1つだけの場合と2つまたは3つの組合せでなる場合がある。組合せでなる場合は、それぞれの成分から三平方の定理で計測線の長さを求める。
【0035】
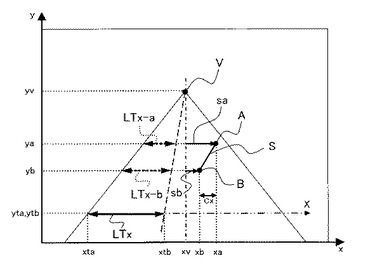
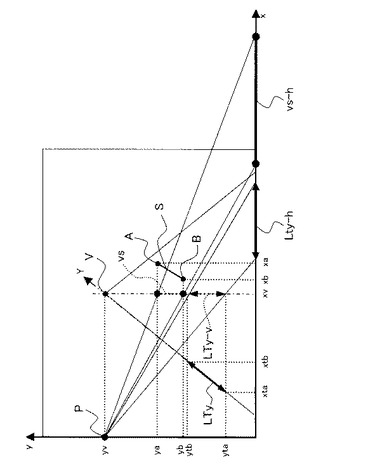
図7に示すのは、X軸成分とY軸成分を含む計測線SのX軸成分CXの算出原理である。X軸方向の教師線LTxの各端点の画像上2次元座標での座標値を(xta,yta)、(xtb,ytb)とし、計測線Sの端点A、Bそれぞれの画像上2次元座標での座標値を(xa,ya)(xb,yb)とする。なお、図7の計測線Sは必ずしも図5の計測線Sと対応していない。
【0036】
計測線Sの端点A、Bそれぞれの消失点垂線からの距離をSaとSbとすると、これらSa、Sbは、教師線LTxの実際の長さTLに基づいて求めることができ、計測線SのX軸成分CXは、CX=Sa−Sbとして求めることができる。ここで、消失点垂線とは、消失点Vからの垂線であり、図7の場合、x軸が教師線LTxと平行であることから、x軸に直交する線分となっている。
【0037】
Saを教師線LTxの実際の長さTLから求めるには、座標値yaの位置に仮想される教師線LTx‐aを用いる。具体的には、教師線LTxの画素数がN、教師線LTx‐aの画素数がNa、そしてSaの画素数がnaであるとすると、Saは、Sa=〔(TL/N)・(TL/Na)〕・naとして求めることができる。同様にしてSbも求めることができる。以上がCXの算出原理で、実際には下記の式でCXを求めるようにしている。
CX = |TL・{(xa-xv)・(yb-ya)/(ya-yv)+xa-xb}・(2・yv-yta-ytb)/{2・(xta-xtb)・(yv-yb)}|
【0038】
図8に示すのは、計測線SのY軸成分CYの算出原理である。CYは、投影図法により求める。すなわち、任意に仮想される投影中心Pからの道路沿い画像上での投影により、Y軸方向の教師線LTyのy軸成分LTy-vと計測線Sのy軸成分svそれぞれをx軸に平行な線分上に投影して教師線投影像LTy-hと計測線投影像vs-hを得る。この場合、教師線投影像LTy-hと計測線投影像vs-hは、それぞれにおける1画素あたりの体現長さが同じになっている。したがって教師線投影像LTy-hと計測線投影像vs-hをそれぞれの画素数について単純に比較することでCYの長さを求めることができる。具体的には、教師線LTyの実際の長さをTLとして、CY=TL・vs-h/LTy-hとしてCYの長さを求めることができる。以上がCYの算出原理で、実際には下記の式でCYを求めるようにしている。
CY = TL・|{(yta-yv)・(ytb-yv)・(yb-ya)}/{(ya-yv)・(yb-yv)・(ytb-yta)}|
以上のようにしてCXとCYが求まれば、計測線Sの実際の長さSLは、SL=(CX2+CY2)1/2として求めることができる。
【0039】
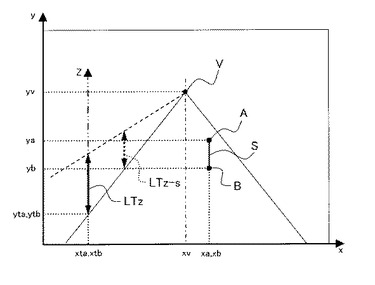
図9に示すのは、計測線SのZ軸成分CZの算出原理である。図9では計測線SがZ軸方向の教師線LTzと平行な場合としてある。したがって計測線SはX軸成分だけからなり、CZ=Sとなる。CZは、上述のCXの算出と同様な原理で教師線LTzに基づいて長さを求めることができる。具体的には、計測線Sの下側の端点の座標値ybの位置に仮想される教師線LTz‐sを用い、教師線LTzの画素数がN、教師線LTz‐sの画素数がNa、そしてCZ(=S)の画素数がnaであるとすると、CZは、CZ=〔(TL/N)・(TL/Na)〕・naとして求めることができる。
【0040】
以上がCZの算出原理で、実際には下記の式でCZを求めるようにしている。ただし式中の「ChiHei_Y」は、計測線Sの端点Bを含む地平面の画像上2次元座標におけるy軸の座標値である。この「ChiHei_Y」は、計測線Sが地平面にある場合は端点Bのy軸座標値と同じになる。ただし、計測線Sの端点Bは必ずしも地平面になくともよい。
CZ = |TL・{(yb-ya)・(yv-yta) / { (yta-ytb)・(yv-ChiHei_Y)}|
【0041】
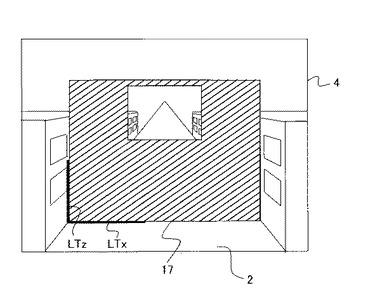
以上のような消失点と計測部位の位置関係が1画素あたりの体現長さに相関することを利用した計測では、1画素あたりの体現長さの精度がカメラからの距離に応じて異なり、カメラに近過ぎたり、カメラから遠過ぎたりすると精度が不十分になる可能性がある。そこで、図10に示すように、道路沿い画像4に計測領域17を適切に設定し、その計測領域17内についてだけ計測を行えるようにするのが好ましい。この場合、教師線LTxと教師線LTzが計測領域17の外縁となるのが適切である。したがって教師線LTを生成させる画像は、教師線LTxと教師線LTzが計測領域17の外縁となるような条件で撮影された画像を計測対象とするのが好ましい。
【0042】
図4に戻って、ステップS6では、必要な計測部位の全てについて計測が終了したかを判定する。この判定が否定的な場合にはステップS4に戻って処理を繰り返し、肯定的になった場合にはステップS7に進む。
【0043】
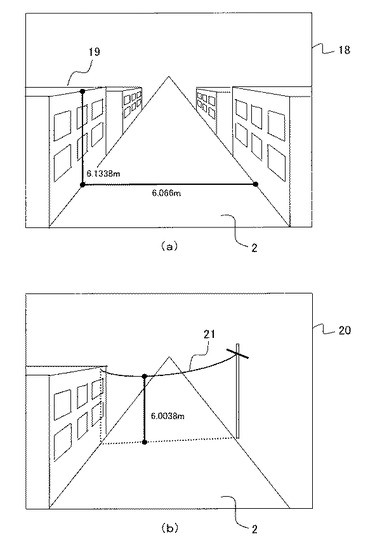
ステップS7では、計測を終えた道路沿い画像に地物データを記録して地物データ付き画像データを生成する。図11に、地物データ付き画像データの例を示す。図11の(a)の例の地物データ付き画像データ18は、道路2の幅員データと道路沿いの建造物19の高さデータが記録されている場合で、図11の(b)の例の地物データ付き画像データ20は、道路横断ケーブル21の地上高データが記録されている場合である。
【0044】
ステップS8では、必要な画像の全てについて計測が終了したかを判定する。この判定が否定的な場合にはステップS1に戻って処理を繰り返し、肯定的になった場合には処理終了となる。
【0045】
以上、本発明を実施するための形態について説明したが、これは代表的な例に過ぎず、本発明はその趣旨を逸脱することのない範囲で様々な形態で実施することができる。例えば、上述の例は道路沿い画像による道路沿い地物の計測に基準尺を適用する場合であったが、これに限られるものでなく、個々の建造物の計測などの場合にも本発明による基準尺は適用できる。また本発明が適用される「地物計測」における「地物」は、一般的な定義による地物に限られず、本発明を適用して「地物計測」が可能なものであればよい。
【符号の説明】
【0046】
4 画像
6 カメラ
31 基準尺
32 X方向尺
33 Y方向尺
34 Z方向尺
37 目盛り
LT 教師線
V 消失点
【技術分野】
【0001】
本発明は、カメラで撮影して得られる画像上で当該画像に取り込まれている地物について計測をなす画像上地物計測で用いる基準尺に関する。
【背景技術】
【0002】
デジタル方式のカメラによる撮影で得られる画像(画像データ)を利用する技術の一つとして、画像上地物計測がある。画像上地物計測では、カメラによる画像上で当該画像に取り込まれている建造物や道路などの様々な地物について、幅、高さ、奥行きなどを計測する。こうした画像上地物計測については、ここで仮に消失点方式と呼ぶ計測手法が知られている(特許文献1)。消失点方式の画像上地物計測では、画像上の消失点に基づいて画像上での地物計測を行う。具体的には、画像に取り込まれている適宜な地物の輪郭を用いて消失点を先ず求める。それからその消失点に基づいて計測対象の地物の所望計測部位における1画素あたりの体現長さを求め、その1画素あたりの体現長さに基づいて画像上での地物計測を行う。
【0003】
このような消失点方式の画像上地物計測では、画像上での絶対長さが既知となる教師線を用いることで、より効率的に計測を行うことが可能となる。すなわち、教師線を用いる手法では、地物計測用の画像中に教師線を生成させ、そして計測対象の画像上の地物の所望計測部位に対して指定した計測線と教師線を、消失点に対する計測線と教師線の相対的位置関係の下で、それぞれの画素数について比較することで計測を行うことができ、したがって計測のための処理負担を大幅に軽減でき、より効率的に計測を行うことが可能となる。この場合の教師線は、地物計測用画像の被写体空間における3次元座標のX、Y、Zの各座標軸について生成させる。つまりX軸方向教師線、Y軸方向教師線及びZ軸方向教師線の各教師線として生成させる。これらの教師線について特許文献1では、長さが既知の線状体、つまり基準尺を画像に取り込ませ、その基準尺の像として生成させるものとし、長さが既知の基準尺として測量用ポールを用いる場合を記述している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−229182号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のように、消失点方式の画像上地物計測では、教師線を用いることで計測をより効率的に行うことが可能となる。ただ、教師線による計測効率をより実際的なものとするには、地物計測用の画像中への教師線の生成に課題が残されている。すなわち、従来では教師線を地物計測用の画像中に生成させるのに測量用ポールを画像に取り込ませるようにしていた。測量用ポールは、2m以上の長さを有しているのが通常である。したがって、地物計測用画像の被写体空間における3次元座標のX、Y、Zの各座標軸について教師線を生成させるためには、2m以上の測量用ポールを3本用い、それらを3次元座標的に画像に取り込ませる作業が必要となる。このことは地物計測用の画像の撮影に伴う作業負担を大きなものとし、その結果、教師線を用いることによる計測効率の向上という実を得られないことになってしまう。つまり、教師線生成用の基準尺として測量用ポールを用いる方法では、基準尺の扱い性や教師線生成に関する作業性という点で課題を残しており、このことで教師線を用いることによる計測効率の向上という実を得られないことになっていたということである。
【0006】
また測量用ポールで教師線を生成させる方法には、教師線における1画素あたりの体現長さの精度についての課題もある。教師線を用いる手法では、教師線の1画素あたりの体現長さを基にして地物の所望計測部位における1画素あたりの体現長さを求めることになる。このため教師線の1画素あたりの体現長さの精度が地物計測の精度に直結することになる。したがって、教師線については、その1画素あたりの体現長さにできるだけ高い精度を得られるようにすることが望まれることになる。しかるに、測量用ポールは、長さについての目盛りの単位が20cmとされているのが通常で、上記のような教師線に対する要求に必ずしも十分に応えることができない。
【0007】
本発明は、以上のような事情を背景にしてなされたものであり、その課題は、画像上地物計測における教師線生成用として、扱い性や教師線生成に関する作業性に優れ、しかもより精度の高い教師線の生成を可能とする基準尺を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために第1の発明では、カメラで撮影して得られる画像上で当該画像に取り込まれている地物の計測を前記画像上で求められる消失点に基づいてなす画像上地物計測にあって、前記画像上で絶対長さが既知となる教師線を前記消失点に基づく計測のために生成させるのに用いられる画像上地物計測用の基準尺において、前記画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するようにそれぞれが組み合わされ、かつそれぞれに前記既知となる絶対長さを示す目盛りが設けられたX方向尺、Y方向尺及びZ方向尺を備えてなることを特徴としている。
【0009】
このような第1の発明による基準尺は、その扱いが容易で教師線生成に関する作業性にも優れる。すなわち第1の発明による基準尺は、地物計測用画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応するように組み合わされたX、Y、Zの各方向尺を備えている。このため、例えば道路沿いの地物について計測を行う場合であれば、基準尺を適宜な配置で地物計測用の画像に取り込めるように道路上に置いて道路沿いの画像を撮影するだけで済み、扱いがきわめて容易で教師線生成に関する作業性にも優れる。
【0010】
また第1の発明による基準尺は、X、Y、Zの各方向尺に長さ目盛りが設けられている。そしてその長さ目盛りについては、例えば大きな目盛りとして10cm単位の目盛り、中間の目盛りとして5cm単位の目盛り、そして細かい目盛りとして1cm単位の目盛りを設けることができ、このような目盛り構造とすることで、1画素あたりの体現長さについての精度がより高い教師線の生成が可能となる。
【0011】
また第2の発明では、上記のような基準尺について、前記X方向尺、Y方向尺及びZ方向尺が折り畳み可能に組み合わされていることを特徴としている。
【0012】
画像上地物計測では、様々な場所に出向いて地物計測用画像の撮影を行うことになり、その際には基準尺を携行することになる。そのため基準尺には携行性に優れていることが求められることになる。これについて、第2の発明による基準尺は、X、Y、Zの各方向尺が折り畳み可能に組み合わされていることから、コンパクトに折り畳んだ状態で携行することができ、優れた携行性要求に応えることができる。
【0013】
また第3の発明では、上記のような基準尺について、前記X方向尺、Y方向尺及びZ方向尺は、それぞれ4つの側面を有するように形成されるとともに、前記4つの側面の内の少なくとも3つの側面に前記目盛りが設けられていることを特徴としている。
【0014】
このような第3の発明の基準尺では、X、Y、Zの各方向尺それぞれの3つの側面に目盛りが設けられているので、地物計測用の画像に取り込ませる際の基準尺の向きについて自由度が高まり、またX、Y、Zの各方向尺における目盛りに基づく1画素あたりの体現長さの算出をより容易に行うことが可能となる。
【発明の効果】
【0015】
以上のような本発明によれば、画像上地物計測における教師線生成用として、扱い性や教師線生成に関する作業性に優れ、しかもより精度の高い教師線の生成を可能とする基準尺が得られる。
【図面の簡単な説明】
【0016】
【図1】一実施例による基準尺の展開状態での構成を簡略化して示す図である。
【図2】一実施例による基準尺の折り畳み状態での構成を簡略化して示す図である。
【図3】画像上地物計測で用いる地物データ取得システムの構成を示す図である。
【図4】画像上地物計測処理の流れを示す図である。
【図5】道路側線や計測線の指定について説明する図である。
【図6】被写体空間における3次元座標の例を示す図である。
【図7】計測線のX軸成分の算出についての原理を説明する図である。
【図8】計測線のY軸成分の算出についての原理を説明する図である。
【図9】計測線のZ軸成分の算出についての原理を説明する図である。
【図10】計測領域の例を示す図である。
【図11】地物データ付き画像データの例を示す図である。
【発明を実施するための形態】
【実施例】
【0017】
図1と図2に、一実施例による画像上地物計測用の基準尺の構成を簡略化して示す。図1は使用時の展開状態を示し、図2は非使用時の折り畳み状態を示している。図1に示すように、本実施例の基準尺31は、X方向尺32、Y方向尺33及びZ方向尺34を備えており、X方向尺32については左右一対となる左側X方向尺32Lと右側X方向尺32Rとして形成され、またZ方向尺34についても左右一対となる左側Z方向尺34Lと右側Z方向尺34Rとして形成されている。
【0018】
これらX、Y、Zの各方向尺32、33、34は、十分な剛性を有し、かつ軽量である材料、例えばアルミ角パイプ材を用いて4つの側面を有する角棒状に形成されており、後述するような地物計測用の画像4(図5)の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するように互いが組み合わされ、かつ折り畳み可能に組み合わされている。より具体的には、左側X方向尺32Lと左側Z方向尺34Lをそれぞれの基端部においてヒンジ部35Lで左側X方向尺32Lに矢印XLの如き回動を可能とするように接続して左側X・Z方向尺ユニット36Lを形成するとともに、右側X方向尺32Rと右側Z方向尺34Rをそれぞれの基端部においてヒンジ部35Rで右側X方向尺32Rに矢印XRの如き回動を可能とするように接続して右側X・Z方向尺ユニット36Rを形成し、これら左側X・Z方向尺ユニット36Lと右側X・Z方向尺ユニット36Rをそれぞれの基端部でY方向尺33の基端部に図示を省略のヒンジ構造で接続し、Y方向尺33に矢印Yの如き回動を可能とするようにされている。そしてこうした接続構造における左側X方向尺32Lの矢印XLの回動、右側X方向尺32Rの矢印XRの回動、及びY方向尺33の矢印Yの回動により、折り畳んで図2に示すような折り畳み状態をとらせることができるようにされている。
【0019】
またX、Y、Zの各方向尺32、33、34は、後述のようにして画像4上に生成させる教師線(図6の教師線LTx、LTy、LTz)にその絶対長さを与えるための目盛り37がそれぞれに設けられている。目盛り37は、10cm単位の大目盛り37a、5cm単位の中目盛り37b、及び1cm単位の小目盛り37cとして設けられており、X、Y、Zの各方向尺32、33、34それぞれの4つの側面の内の3つの側面に設けられている。
【0020】
ここで、Y方向尺33とZ方向尺34は、その長さがほぼ30cm程度とされ、X方向尺32は、左側X方向尺32Lと右側X方向尺32Rがそれぞれ20cm程度の長さとされ、全体で40cm程度の長さとなるようにされている。こうした基準尺31におけるX、Y、Zの各方向尺32、33、34の長さサイズは、測量用ポールに較べて大幅に短いといえる。すなわち基準尺31では、X、Y、Zの各方向尺32、33、34の長さサイズを30cm〜40cm程度で済ませることができ、これによりコンパクト化が図られているということである。これは、様々な実験を繰り返して得られた知見、つまり基準尺31における上記のような構造、特に目盛り37に関する上記のような構造とすることで、X、Y、Zの各方向尺32、33、34の長さが30cm〜40cm程度でも十分に精度の高い教師線の生成が可能であるという知見によるものである。
【0021】
以下では以上のような基準尺31が適用される画像上地物計測の例について説明する。図3に、一例による画像上地物計測で用いる地物データ取得システム1の構成を示す。本例における地物データ取得システム1は、道路2で撮影車両3を走行させながら画像として道路沿い画像4を取得し、その道路沿い画像4における地物について計測を行って地物データを得る場合であり、撮影車両3と画像上地物計測システム5からなる。
【0022】
撮影車両3は、例えば幅員が4m以下であるような狭い道路が錯綜する市街地でも走行可能な車両にデジタル方式のカメラ6と撮影管理システム7を搭載して構成されている。
【0023】
カメラ6は、デジタル式のスチールカメラまたはビデオカメラであり、通常はスチールカメラが用いられ、前方撮影用カメラ6fと後方撮影用カメラ6rとして2台が搭載される。前方撮影用カメラ6fは、撮影車両3の走行方向前方を走行方向に光軸が沿った状態で撮影を行い、後方撮影用カメラ6rは、撮影車両3の走行方向後方を走行方向に光軸が沿った状態で撮影を行う。これら前方撮影用カメラ6fや後方撮影用カメラ6rによる撮影で得られる道路沿い画像4は、光軸方向に延びている状態で道路を取り込んだ画像となる。このように走行方向前方と後方のそれぞれについて撮影できるようにするのは、撮影車両3の走行方向によっては前方撮影用カメラ6fが逆光になる場合があることから、そのような場合に対応できるようにするためである。
【0024】
撮影管理システム7は、測位システム8、撮影制御システム9、および画像データ管理システム10の各サブシステムを含んでなる。測位システム8は、撮影車両3の現在位置と走行方向、より具体的にはカメラ6の光軸方向についての情報である位置方位情報を例えば走行距離1mごとにといった間隔で取得するのに機能する。そのために測位システム8は、GPS(全地球測位システム)と距離/慣性計測システムを組み合わせて構成される。GPSは、撮影車両3の前後に設けた2つのGPSアンテナ11により衛星からの信号を受信することで位置方位情報を取得する。一方、距離/慣性計測システムは、撮影車両3の走行方向や車両の水平面に対する傾きをジャイロにより検出する慣性計測器と撮影車両3の走行距離を検出する距離計測器からなり、これらにより位置方位情報を取得する。
【0025】
撮影制御システム9は、一定距離間隔で道路沿い画像4を取得できるような制御としてカメラ6による撮影を制御する。具体的には、撮影車両3の走行距離をカウントし、例えば5mといった一定の走行距離ごとに撮影指令を出力してカメラ6に撮影を行わせる。こうした撮影により、撮影車両3が走行する道路に沿った一定距離間隔による一連の道路沿い画像を取得することができる。
【0026】
画像データ管理システム10は、ワークステーションレベルのデータ処理装置を用いて構成され、カメラ6による撮影で取得された道路沿い画像4のデータを管理する。その管理は、道路沿い画像4をその撮影時の位置方位情報と関連させるようにしてなされる。
【0027】
ここで、道路沿い画像4には、後述のような画像上地物計測処理に必要な教師線LTを生成させるようにする。教師線LTは、道路沿い画像4中の道路2の側線(これは後述のように消失点を求めるための地物の輪郭として用いられる)に沿う方向を1つの座標軸とした道路沿い画像4の被写体空間における3次元座標(X、Y、Z座標)の各座標軸について生成させる。つまりX軸方向の教師線LTx、Y軸方向の教師線LTy、Z軸方向の教師線LTzとして生成させる。これらの教師線LTx、LTy、LTzは、上述の基準尺31を道路沿い画像4に取り込ませることで、基準尺31におけるX、Y、Zの各方向尺32、33、34の像に基づいて生成させる。このような教師線LTは、原理的にいえば、道路沿い画像を同一の撮影条件で撮影する範囲については、その撮影条件で最初に撮影する道路沿い画像にだけ生成させることで足りる。ただ実際的には、例えば1日の撮影作業の最初に撮影する道路沿い画像ごとに教師線用の線状体を写し込ませて教師線を生成させるようにするのが好ましい。これは、撮影車両3へのカメラ6のセット状態が撮影条件に影響し、そのセット状態が1日の撮影作業ごとに微妙に異なる可能性があるからである。
【0028】
画像上地物計測システム5は、データ処理装置12にコンピュータプログラムとして構成される画像上地物計測手段13を搭載して構成される。画像上地物計測手段13は、画像データ管理システム10から取り込んだ道路沿い画像4のデータや道路沿い画像4に地物データを記録した後述のような地物データ付き道路沿い画像を管理する画像データ管理部14、道路沿い画像4に取り込まれている地物について計測して地物データを取得する計測部15、および計測部15が取得した地物データを道路沿い画像4に記録して地物データ付き道路沿い画像を生成させる地物データ記録部16を含んでいる。
【0029】
以下では画像上地物計測システム5でなされる画像上地物計測処理の例について説明する。本例における画像上地物計測処理は、道路沿い画像4における道路2の側線を地物の輪郭として用いて消失点を求める場合であり、図4にその流れを示すように、ステップS1〜ステップS8の各処理過程を含む。
【0030】
まずステップS1で処理対象画像の表示処理がなされる。処理対象画像の表示処理は、計測対象の道路沿い画像をデータ処理装置12の表示画面に表示する処理で、ユーザによる指定を受けて行うか、あるいは一連の道路沿い画像を順次的に表示するようにして行われる。
【0031】
ステップS2では、道路側線の指定を行う。具体的には、ステップS1で表示した道路沿い画像について道路の側線をユーザが指定する。その指定は、例えば図5に示すようにして行う。具体的には、表示画面に表示されている道路沿い画像4における道路2の側線を左右で対応する直線部分のそれぞれについて描画機能によりなぞるようにして2本の指定線LI、LIを描線することで行う。
【0032】
ステップS3では、消失点の決定処理がなされる。道路2の側線を用いて消失点を求める場合、消失点は2本の指定線LI、LIの交点Vとなる。したがって消失点の特定は、交点Vの道路沿い画像4上での位置を求めることで行う。具体的には、道路沿い画像4の横方向(道路沿い画像4の被写体空間における横方向に対応)をx軸とし、縦方向をy軸とする画像上2次元座標を道路沿い画像4に設定し、その画像上2次元座標における座標値(xv,yv)として交点Vの道路沿い画像4上での位置を求め、それを消失点とする。なお、図5では、x軸がX軸方向の教師線LTxと平行になるように画像上2次元座標を設定する場合としてある。
【0033】
ステップS4では、計測部位に対する計測線の指定処理がなされる。この処理は、図5に示す例のように、描画機能により計測部位に計測線Sを描線することで行うか、または計測部位の両端に端点A、Bを指定することで行う。
【0034】
ステップS5では、ステップS4で指定の計測線の計測処理がなされる。この計測処理は、図6に示す例のような道路沿い画像の被写体空間における3次元座標を前提にして行う。ここでは3次元座標について横方向をX軸、奥行き方向をY軸、縦方向をZ軸とする。このような3次元座標を前提にする場合、計測線は、それが道路沿い画像上でとる姿勢に応じて、X、Y、Zの各軸方向の成分の1つだけの場合と2つまたは3つの組合せでなる場合がある。組合せでなる場合は、それぞれの成分から三平方の定理で計測線の長さを求める。
【0035】
図7に示すのは、X軸成分とY軸成分を含む計測線SのX軸成分CXの算出原理である。X軸方向の教師線LTxの各端点の画像上2次元座標での座標値を(xta,yta)、(xtb,ytb)とし、計測線Sの端点A、Bそれぞれの画像上2次元座標での座標値を(xa,ya)(xb,yb)とする。なお、図7の計測線Sは必ずしも図5の計測線Sと対応していない。
【0036】
計測線Sの端点A、Bそれぞれの消失点垂線からの距離をSaとSbとすると、これらSa、Sbは、教師線LTxの実際の長さTLに基づいて求めることができ、計測線SのX軸成分CXは、CX=Sa−Sbとして求めることができる。ここで、消失点垂線とは、消失点Vからの垂線であり、図7の場合、x軸が教師線LTxと平行であることから、x軸に直交する線分となっている。
【0037】
Saを教師線LTxの実際の長さTLから求めるには、座標値yaの位置に仮想される教師線LTx‐aを用いる。具体的には、教師線LTxの画素数がN、教師線LTx‐aの画素数がNa、そしてSaの画素数がnaであるとすると、Saは、Sa=〔(TL/N)・(TL/Na)〕・naとして求めることができる。同様にしてSbも求めることができる。以上がCXの算出原理で、実際には下記の式でCXを求めるようにしている。
CX = |TL・{(xa-xv)・(yb-ya)/(ya-yv)+xa-xb}・(2・yv-yta-ytb)/{2・(xta-xtb)・(yv-yb)}|
【0038】
図8に示すのは、計測線SのY軸成分CYの算出原理である。CYは、投影図法により求める。すなわち、任意に仮想される投影中心Pからの道路沿い画像上での投影により、Y軸方向の教師線LTyのy軸成分LTy-vと計測線Sのy軸成分svそれぞれをx軸に平行な線分上に投影して教師線投影像LTy-hと計測線投影像vs-hを得る。この場合、教師線投影像LTy-hと計測線投影像vs-hは、それぞれにおける1画素あたりの体現長さが同じになっている。したがって教師線投影像LTy-hと計測線投影像vs-hをそれぞれの画素数について単純に比較することでCYの長さを求めることができる。具体的には、教師線LTyの実際の長さをTLとして、CY=TL・vs-h/LTy-hとしてCYの長さを求めることができる。以上がCYの算出原理で、実際には下記の式でCYを求めるようにしている。
CY = TL・|{(yta-yv)・(ytb-yv)・(yb-ya)}/{(ya-yv)・(yb-yv)・(ytb-yta)}|
以上のようにしてCXとCYが求まれば、計測線Sの実際の長さSLは、SL=(CX2+CY2)1/2として求めることができる。
【0039】
図9に示すのは、計測線SのZ軸成分CZの算出原理である。図9では計測線SがZ軸方向の教師線LTzと平行な場合としてある。したがって計測線SはX軸成分だけからなり、CZ=Sとなる。CZは、上述のCXの算出と同様な原理で教師線LTzに基づいて長さを求めることができる。具体的には、計測線Sの下側の端点の座標値ybの位置に仮想される教師線LTz‐sを用い、教師線LTzの画素数がN、教師線LTz‐sの画素数がNa、そしてCZ(=S)の画素数がnaであるとすると、CZは、CZ=〔(TL/N)・(TL/Na)〕・naとして求めることができる。
【0040】
以上がCZの算出原理で、実際には下記の式でCZを求めるようにしている。ただし式中の「ChiHei_Y」は、計測線Sの端点Bを含む地平面の画像上2次元座標におけるy軸の座標値である。この「ChiHei_Y」は、計測線Sが地平面にある場合は端点Bのy軸座標値と同じになる。ただし、計測線Sの端点Bは必ずしも地平面になくともよい。
CZ = |TL・{(yb-ya)・(yv-yta) / { (yta-ytb)・(yv-ChiHei_Y)}|
【0041】
以上のような消失点と計測部位の位置関係が1画素あたりの体現長さに相関することを利用した計測では、1画素あたりの体現長さの精度がカメラからの距離に応じて異なり、カメラに近過ぎたり、カメラから遠過ぎたりすると精度が不十分になる可能性がある。そこで、図10に示すように、道路沿い画像4に計測領域17を適切に設定し、その計測領域17内についてだけ計測を行えるようにするのが好ましい。この場合、教師線LTxと教師線LTzが計測領域17の外縁となるのが適切である。したがって教師線LTを生成させる画像は、教師線LTxと教師線LTzが計測領域17の外縁となるような条件で撮影された画像を計測対象とするのが好ましい。
【0042】
図4に戻って、ステップS6では、必要な計測部位の全てについて計測が終了したかを判定する。この判定が否定的な場合にはステップS4に戻って処理を繰り返し、肯定的になった場合にはステップS7に進む。
【0043】
ステップS7では、計測を終えた道路沿い画像に地物データを記録して地物データ付き画像データを生成する。図11に、地物データ付き画像データの例を示す。図11の(a)の例の地物データ付き画像データ18は、道路2の幅員データと道路沿いの建造物19の高さデータが記録されている場合で、図11の(b)の例の地物データ付き画像データ20は、道路横断ケーブル21の地上高データが記録されている場合である。
【0044】
ステップS8では、必要な画像の全てについて計測が終了したかを判定する。この判定が否定的な場合にはステップS1に戻って処理を繰り返し、肯定的になった場合には処理終了となる。
【0045】
以上、本発明を実施するための形態について説明したが、これは代表的な例に過ぎず、本発明はその趣旨を逸脱することのない範囲で様々な形態で実施することができる。例えば、上述の例は道路沿い画像による道路沿い地物の計測に基準尺を適用する場合であったが、これに限られるものでなく、個々の建造物の計測などの場合にも本発明による基準尺は適用できる。また本発明が適用される「地物計測」における「地物」は、一般的な定義による地物に限られず、本発明を適用して「地物計測」が可能なものであればよい。
【符号の説明】
【0046】
4 画像
6 カメラ
31 基準尺
32 X方向尺
33 Y方向尺
34 Z方向尺
37 目盛り
LT 教師線
V 消失点
【特許請求の範囲】
【請求項1】
カメラで撮影して得られる画像上で当該画像に取り込まれている地物の計測を前記画像上で求められる消失点に基づいてなす画像上地物計測にあって、前記画像上で絶対長さが既知となる教師線を前記消失点に基づく計測のために生成させるのに用いられる画像上地物計測用の基準尺において、
前記画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するようにそれぞれが組み合わされ、かつそれぞれに前記既知となる絶対長さを示す目盛りが設けられたX方向尺、Y方向尺及びZ方向尺を備えてなることを特徴とする画像上地物計測用の基準尺。
【請求項2】
前記X方向尺、Y方向尺及びZ方向尺が折り畳み可能に組み合わされていることを特徴とする請求項1に記載の画像上地物計測用の基準尺。
【請求項3】
前記X方向尺、Y方向尺及びZ方向尺は、それぞれ4つの側面を有するように形成されるとともに、前記4つの側面の内の少なくとも3つの側面に前記目盛りが設けられていることを特徴とする請求項1又は請求項2に記載の画像上地物計測用の基準尺。
【請求項1】
カメラで撮影して得られる画像上で当該画像に取り込まれている地物の計測を前記画像上で求められる消失点に基づいてなす画像上地物計測にあって、前記画像上で絶対長さが既知となる教師線を前記消失点に基づく計測のために生成させるのに用いられる画像上地物計測用の基準尺において、
前記画像の被写体空間における3次元座標のX、Y、Zの各座標軸に対応して延在するようにそれぞれが組み合わされ、かつそれぞれに前記既知となる絶対長さを示す目盛りが設けられたX方向尺、Y方向尺及びZ方向尺を備えてなることを特徴とする画像上地物計測用の基準尺。
【請求項2】
前記X方向尺、Y方向尺及びZ方向尺が折り畳み可能に組み合わされていることを特徴とする請求項1に記載の画像上地物計測用の基準尺。
【請求項3】
前記X方向尺、Y方向尺及びZ方向尺は、それぞれ4つの側面を有するように形成されるとともに、前記4つの側面の内の少なくとも3つの側面に前記目盛りが設けられていることを特徴とする請求項1又は請求項2に記載の画像上地物計測用の基準尺。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−225799(P2012−225799A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−94198(P2011−94198)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(398026679)アクリーグ株式会社 (3)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(398026679)アクリーグ株式会社 (3)
[ Back to top ]