
画像入力装置
【課題】 被写体の検出をリアルタイムに行う画像入力装置を提供する。
【解決手段】 撮像領域へ所定パタン(投光パタン22)の光を照射する投光部10と、投光パタン22の光が照射された被写体21を撮像する撮像部11と、投光部10と撮像部11とを支持する支持部20と、外部に設けられたPC等の計算機とデータを送受信するためのI/F部24と、を有し、投光部10から撮像領域32内へ照射した投光パターン22を撮像し、撮像画像を時系列に従って比較することで、撮像領域32内の変化を検出する。
【解決手段】 撮像領域へ所定パタン(投光パタン22)の光を照射する投光部10と、投光パタン22の光が照射された被写体21を撮像する撮像部11と、投光部10と撮像部11とを支持する支持部20と、外部に設けられたPC等の計算機とデータを送受信するためのI/F部24と、を有し、投光部10から撮像領域32内へ照射した投光パターン22を撮像し、撮像画像を時系列に従って比較することで、撮像領域32内の変化を検出する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、画像入力装置に関し、特に、被写体を自動的に撮像する画像入力装置に関する。
【0002】
【従来の技術】紙面等に描かれた画像を電子データ化し、有効に活用するための技術として、例えば特開平9−102013号公報が開示するところの、ビデオカメラを用いて時系列に沿って撮影された画像データの画素値を監視することにより、ユーザが筆記した筆跡情報を検出して、文字・図形認識を行う技術が存在する(以下、従来技術1という)。
【0003】この従来技術1が開示するところの技術は、撮像時に既に対象物がビデオカメラに対して設置されており、これに筆記された情報を記録するためのものである。
【0004】また、近年、雑誌や新聞等を電子画像データとして取り込み、これを用いてプレゼンテーション用の資料を作成することや、インターネット等を介するwebページ等に掲載する機会が多くなってきている。
【0005】例えば、日本電気株式会社(商標登録)から提供された「アクティブカメラを用いた文書画像の高精細入力と認識応用」(信学技法PRMU99−76, 1999−09)では、ビデオカメラを被写体の上方に設置し、ユーザが手指で指し示した被写体の一部分だけを高解像度の画像データとして撮影する技術が開示されている(以下、従来技術2という)。より詳細には、撮影画像を2値化して手指が指し示した場所を検出するものである。
【0006】また、以上のような技術において、原稿画像を上方から撮影する撮像装置が用いられている場合、被写体の形状を保持するために使用する手指が撮像エリアに入ってしまい、正確に被写体を撮影できないという不具合が存在するが、特開平6−105091号公報では、手指の位置を撮影画像の輝度ヒストグラムより検出し、手指部分の画像を消去することで、このような不具合を解決する技術が開示されている(以下、従来技術3という)。
【0007】また、特開平6−102993号公報では、ビデオカメラを被写体の上方に設置し、時系列に沿って撮影した被写体画像同士の差分処理を行うことにより被写体の動きを検出する技術が開示されている(以下、従来技術4という)。
【0008】更に、特開平9−307712号公報や特開平10−304130号公報では、複数の測距センサにより測定された被写体との距離の変化から原稿のページがめくられた方向を判定し、このページめくり方向から読み取るべき画像の並び順を判定して、この並び順に基づいて読み取った画像の出力制御を行う技術が開示されている(以下、従来技術5という)。
【0009】更にまた、特開平10−267832号公報では、2台のカメラを用いて3次元形状を計測することにより被写体の3次元形状を認識して、パーソナルコンピュータ(以下、PCという)に任意の作業を命令する技術が開示されている(以下、従来技術6という)。
【0010】
【発明が解決しようとする課題】しかしながら、例えば従来技術2が開示するところの技術では、被写体の所定の領域を自動的に記録するためのトリガに、撮影した被写体画像の輝度値の変化を用いているため、撮影範囲にユーザの影が誤って映り込むことにより不要に記録が開始されてしまうという問題が存在する。
【0011】また、従来技術3及び従来技術4が開示するところの技術においても同様に、撮影した被写体画像の輝度値の変化をトリガとして被写体の記録を開始するため、外部の照明条件等の変化によって誤って記録が開示されてしまうという問題が存在する。
【0012】更に、従来技術5が開示するところの技術は、本等のページめくりに限定した技術であり、撮影範囲内に被写体が進入したことを自動的に検出して撮影を開始する構成となっていない。また、ページめくりの検出には撮像部から被写体までの距離を計測した結果を利用しているため、安価な計算装置であると距離計測を行うのに時間がかかり、リアルタイムに検出することが困難であるという不具合が存在する。
【0013】また、従来技術6が開示することころの技術では、2台以上のカメラを使用して3次元形状を計測し、ユーザの命令を認識するものであるため、3次元形状の計測に要する計算処理内容が多く、安価な計算装置であるとリアルタイムに3次元形状を計測できないという問題が存在する。
【0014】本発明は上記問題に鑑みてなされたものであり、被写体の検出をリアルタイムに行う画像入力装置を提供することを目的とする。
【0015】
【課題を解決するための手段】係る目的を達成するために、請求項1記載の発明は、撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段が、所定期間毎に前記撮像領域内の前記パタンを取得し、該パタンの第1の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴としている。
【0016】これにより、請求項1記載の発明では、被写体の検出をリアルタイムに行う画像入力装置を提供することが可能となる。
【0017】即ち、時系列毎に撮影されたパタンの変化量を検出して撮影準備を開始するよう構成することで、3次元形状の計測に必要な計算処理を省いて撮像領域内に被写体が入ってくることを検出することが可能となり、被写体の検出がリアルタイムに行うことができる画像入力装置を安価に実現することができる。
【0018】更に請求項1記載の発明では、画像入力装置自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0019】また、請求項2記載の発明は、撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、前記撮像領域内の3次元形状を計測する3次元形状計測手段と、該3次元形状計測手段により計測された前記撮像領域内の3次元形状に基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段が、前記3次元形状計測手段により計測された前記撮像領域内の3次元形状の第2の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴としている。
【0020】これにより、請求項2記載の発明では、被写体の検出をリアルタイムに行う画像入力装置を安価に提供することが可能となる。
【0021】即ち、画像入力装置100自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0022】更に、請求項3記載の発明は、前記被写体検出手段が、前記第1又は第2の変化を数値化し、数値化した値が第1のしきい値よりも大きい場合、前記撮像領域内に前記被写体が設置されたと判定することを特徴としている。
【0023】これにより、請求項3記載の発明では、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0024】更に、請求項4記載の発明は、前記撮像領域を移動させる領域移動手段を有し、前記第1のしきい値が、前記領域移動手段により移動した前記撮像領域の位置に基づいて変化することを特徴としている。
【0025】これにより、請求項4記載の発明では、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0026】更に請求項4記載の発明では、撮像領域を移動させることで、被写体の検索範囲を広範囲とした画像入力装置が実現できる。
【0027】更に、請求項5記載の発明は、前記被写体検出手段が、前記撮像領域における前記第1又は第2の変化が含まれる領域が所定の面積以上である場合、該撮像領域内に前記被写体が設置されたと判定することを特徴としている。
【0028】これにより、請求項5記載の発明では、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0029】更に、請求項6記載の発明は、前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第3の変化又は前記3次元形状計測手段により計測された3次元形状の第4の変化を数値化した値が、第2のしきい値以下となったことを検出する検出手段を有し、前記第3又は第4の変化が、前記第1又は第2の変化を判定するにあたり使用したパタン又は3次元形状に対する変化であり、前記撮像手段が、前記検出手段により前記第3又は第4の変化を数値化した値が前記第2のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴としている。
【0030】これにより、請求項6記載の発明では、撮像準備を開始した後に投光したパタンが基準となる位置に戻るまで撮像動作を待機させることにより、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【0031】更に、請求項7記載の発明は、前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第5の変化又は前記3次元形状計測手段により計測された3次元形状の第6の変化を数値化した値が、第3のしきい値以下となったことを検出する検出手段を有し、前記第5又は第6の変化が、前記前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後の前記撮像領域内の変化であり、前記撮像手段が、前記検出手段により前記第5又は第6の変化を数値化した値が前記第3のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴としている。
【0032】これにより、請求項7記載の発明では、撮像準備を開始した後に投光したパタンの位置変化がない状態が一定時間以上継続するまで撮影開始を待機することにより、厚みがある被写体に対しても確実に撮像動作を実行し、且つ、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【0033】
【発明の実施の形態】〔本発明の特徴〕本発明を説明するにあたり、本発明の特徴について先に述べる。
【0034】本発明は、撮像領域内に設置された被写体への書込内容を自動的に検出し、これを電子化するものである。これを実現するために本発明は、撮像領域に所定パタンの光を投影し、これを撮像する。また、撮像したパタンを時系列に沿って比較することで、撮像した画像中に生じた変化量を算出する。これにより本発明では、撮像領域内に被写体となる物体が設置されたか否かを判別することができ、自動的に撮像を開始することが可能となる。
【0035】また、撮像領域内へ投影する所定パタンの光は、画像入力装置又は撮像装置内に設けた光源から照射する。これにより本発明では、外部の照明条件等に影響されずに、自動的且つリアルタイムに被写体の有無を検出することが可能となる。
【0036】更に本発明では、撮像領域内に被写体が設置されたか否かを判定する際のデータの処理量を比較的少なくする。これにより本発明では、処理能力が比較的低い安価なコンピュータを用いても、リアルタイムな動作を実現することができる。
【0037】以下、本発明を好適に実施した形態について、図面を用いて詳細に説明する。但し、以下の説明では、本発明を画像入力装置に適用した場合について例示するが、これを撮像装置としても同様に実施することができるものである。
【0038】〔第1の実施例〕まず、本発明を好適に実施した形態について、以下に図面を用いて詳細に説明する。
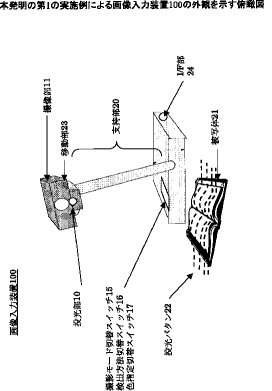
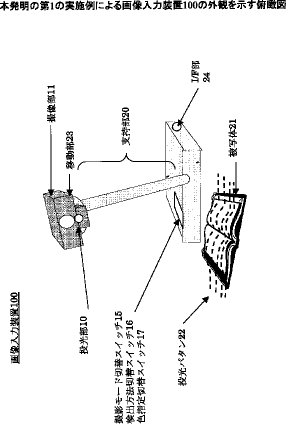
【0039】・画像入力装置100の構成図1は、本実施例による画像入力装置100の外観を示す俯瞰図である。図1を参照すると、画像入力装置100は、撮像領域へ所定パタン(投光パタン22)の光を照射する投光部10と、投光パタン22の光が照射された被写体21を撮像する撮像部11と、以下で説明する実施例により提供される撮像モードを切り替えるための撮影モード切替スイッチ15と、被写体21の有無を検知する方法を切り替えるための検出方法切替スイッチ16と、投光パタン22における色指定を切り替えるための色指定切替スイッチ17と、投光部10及び撮像部11の方向や位置を移動させる移動部23と、投光部10と撮像部11と移動部23とを支持する支持部20と、外部に設けられたPC(パーソナルコンピュータ)等の情報処理機器とデータを送受信するためのI/F部24と、を有して構成される。
【0040】また、画像入力装置100は、撮像モード切替スイッチ15と検出方法切替スイッチ16と色指定切替スイッチ17とが表示画面つきのタッチパネルなどで構成されており、所望の撮像モード、検出方法、3次元形状の計測に使用する投光パタン22の色等を設定できるように構成されている。
【0041】また、画像入力装置100と外部のPC等とは、取得した画像データの送受信やその他、コマンド等のデータの送受信をI/F24を介して行う。
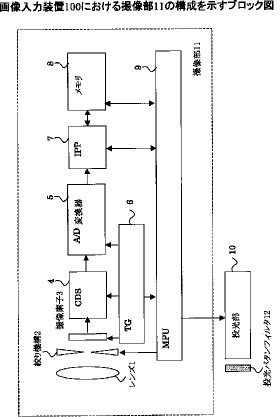
【0042】図2に画像入力装置100における撮像部11の構成を説明するためのブロック図を示す。図2を参照すると、撮像部11は、レンズ1と絞り機構2と撮像素子3とCDS(相関二重サンプリング回路)4とA/D変換器5とTG(タイミングジェネレータ)6とIPP(画像前処理回路)7とメモリ8とMPU9とを有して構成される。
【0043】この構成において、被写体21の画像はレンズ1及び絞り機構2を介して撮像素子3上に形成される。撮像素子3からの画像信号はCDS4でサンプリングされ、その後、A/D変換器5においてデジタル信号化される。また、この処理におけるタイミングはTG6において生成される。
【0044】A/D変換器5から出力された画像信号はIPP7へ入力され、IPP7においてアパーチャ補正等の画像処理、圧縮処理等が行われた後、メモリ8に保存される。
【0045】また、上記構成において各ブロック(ユニットともいう)の動作は、MPU9により制御される。更に、MPU9は投光部10も制御する。従って、投光部10はMPU9により制御されたタイミングで光を出力する。
【0046】また、投光部10には投光パタンフィルタ12が設けられており、被写体21に照射する光が特定のパタン(投光パタン22)となるように整形される。但し、本実施例における投光パタン22としては、図5に示すような縞模様の形状であっても、他の形状であってもよい。
【0047】・画像入力装置100の動作次に、本実施例による画像入力装置100の動作について図面を用いて詳細に説明する。
【0048】図3は図1における被写体21が撮像領域32に入ったことを検出して、画像入力装置100が自動的に撮像動作を実行する際の動作を示すフローチャートである。
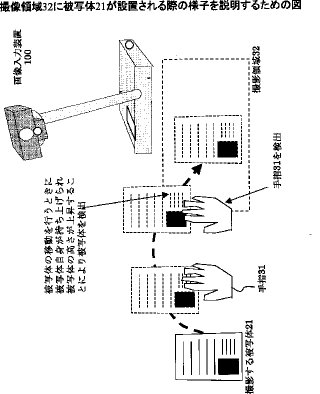
【0049】本実施例において、ユーザが被写体21を画像入力装置100の撮像領域32に設置する際には、図4に示すように、被写体21を移動させるために必要となる手段、例えば手指や棒等、被写体21と異なる3次元形状を有する物体が画像入力装置100の撮像領域32内に進入する。尚、以下の説明では被写体21の挿入時にユーザの手指31が進入する場合を例示する。
【0050】従って、画像入力装置100は、投光部10により投光されている投光パタン22の位置変化により手指31が撮像領域32への進入したことを検出し、これに基づいて、撮像領域32内に被写体21が設置されたことを判定する。
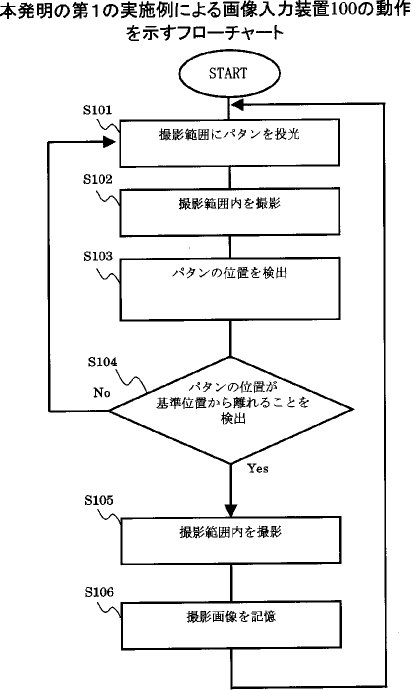
【0051】図4に示す動作ではまず、投光部10から光が出力され、これが投光パタンフィルタ12を介して撮像領域32に照射される(ステップS101)。次に、画像入力装置100は撮像部11で撮像領域32内の画像(撮像画像又は画像信号ともいう)を取得することでステップS101で投光した投光パタン22を撮像し(ステップS102)、撮像画像におけるパタン(撮像パタン)のそれぞれの光の点(光が照射されている点:以下、光点という)の位置を検出する(ステップS103)。
【0052】その後、画像入力装置100は、検出した撮像パタンの光点の位置が前回撮像した画像における各光点の位置(これを基準位置とする)からはずれているか否かを判定する(ステップS104)。但し、第1回目は、判定処理が省略されるか、又は、予め登録されている位置との比較が行われるよう構成するとよい。
【0053】また、ステップS104における処理を、検出された撮像パタンに基づいて撮像画像における3次元形状を算出してから被写体の有無を判定するように構成した場合、必要となる処理量が増加するため、本実施例ではステップS104において3次元形状の算出を行うことなく、簡易に被写体の有無を判定できるように構成する。この説明は、後述において図5を用いて詳細に説明する。
【0054】尚、ステップS101からステップS104までの動作は、ステップS104において光点が基準位置から離れていると判定されるまで所定周期毎に実行される(ステップS104のNo)。
【0055】これに対し、ステップS104の判定の結果、撮像領域32内に被写体が設置されたと判定した場合(ステップS104のYes)、画像入力装置100は撮像準備を開始し、準備完了後、所定の時間が経過した後に撮像範囲32内における被写体21を撮像する(ステップS105)。ここで、撮像準備の一例としては、被写体21のエッジ情報からカメラの焦点を調整することや、外光から露出補正を行うこと等が挙げられる。これにより、瞬時に被写体21を撮影できる状態としておくことができる。
【0056】その後、画像入力装置100は、ステップS105で取得した画像信号に対してCDS4,A/D変換器5,IPP7により所定の処理を施し、画像データとしてメモリ8に保存する(ステップS106)。但し、ステップS106では、画像データをメモリ8に保存するのでなく、I/F部24を介して接続されたPC等の外部機器へ送信するよう構成してもよい。
【0057】このようにステップS106において撮像した画像を保存した後、画像入力装置100は、ステップS101へ帰還し、上記の動作を繰り返す。
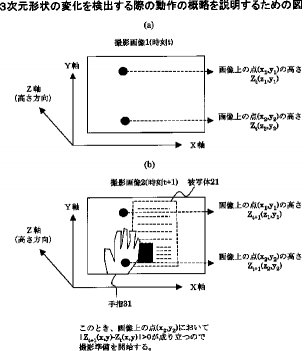
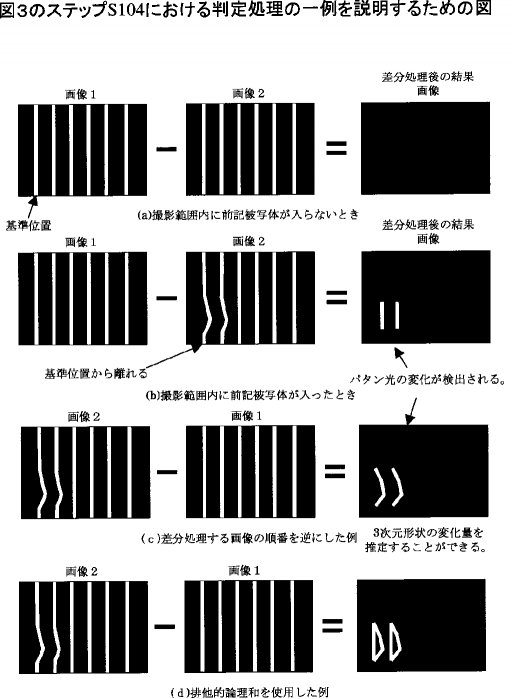
【0058】次に、図5を用いて図4におけるステップS104の判定処理の例を説明する。尚、図5に示す方法では、撮像画像に基づいて3次元形状の算出を行うことなく、前回の撮像画像(今回実行したステップS101〜104より前であって、最後に実行されたステップS101〜ステップS104により取得された画像)との差分処理を行うことで、被写体21が撮像範囲32に設置されたことを検出する。
【0059】図5(a)は、本判定処理に撮像画像の差分処理を適用した場合の例である。但し、図5(a)は撮像範囲32内に被写体21が設置されていない場合を示すものである。
【0060】この際の差分処理は以下の(式1)で示されるものとなる。
Imagex,y,t−Imagex,y,t+1>0 …(式1)
(式1)において、Imagex,y,tは時刻tに撮像された画像(これを前回の分とする:画像1)における各点(x,y)の画素値を示し(xは任意の画素のx方向の位置,yは任意の画素のy方向の位置)、Imagex,y,t+1は時刻t+1に撮像された画像(これを今回の分とする:画像2)における対応する各点(x,y)の画素値を示す。
【0061】この計算によれば、図5(a)に示す例では、前回の画素値と今回の画素値とに差分が生じていないため、(式1)の差分処理の結果による結果画像において撮像パタンの撮像画像が検出されない。
【0062】これに対し、前回の撮像画像(画像1)と今回の撮像画像(画像2)とに差分が存在する場合の例を図5(b)を用いて説明する。
【0063】図5(b)を参照すると、画像2における撮像パタンと画像1における撮像パタンとに差分が生じている。このため、(式1)に示す差分処理を行った結果として得られる結果画像には、画像1における画像2と異なる部分が残る。但し、本実施例では、(式1)に示す差分処理において負の値を破棄するものとする。このため、画像2における画素値は破棄されて結果画像に含まれない。
【0064】このように画像1と画像2との間に差分が生じ、結果画像に撮像パタンの一部又は全部が残った場合、画像入力装置100は、撮像領域32に手指31が進入し、被写体21が設置された(ステップS104のYes)と判定する。
【0065】上記図5(a),(b)で示した差分処理を適用する利点としては、投光パタン22が照射されている部分である基準位置の画像情報だけで、撮像範囲32内に被写体21が設置されたか否かを判定することが可能なため、被写体21の検出処理に要するデータ量が比較的少量で済む点である。
【0066】また、(式1)で示した差分処理において、項を入れ換えることも可能である。これを以下(式2)に示す。
Imagex,y,t+1−Imagex,y,t>0 …(式2)
このように、差分処理を画像2から画像1を引算するよう構成することで、図5(c)に示すように、差分処理後に残る撮像パタンの各光点の位置から3次元形状の変化量を推測することが可能となる。
【0067】次に、排他的論理和を適用した場合の例を図5(d)に示す。図5(d)に示す例では、時系列に沿って撮像した画像を2値化処理した後に、(式3)に示す排他的論理和の式の左辺を実行する。
【0068】
【数1】

この演算の結果、(式3)を満足する場合、画像入力装置100はステップS104において、撮像領域32内に被写体21が設置されたと判定する。この排他的論理和を適用した場合でも、演算後に残る撮像パタンの各光点の位置から3次元形状の変化量を推測することが可能となる。
【0069】このように本実施例では、時系列に沿って撮影された投光パタン22の変化量を検出して撮影準備を開始するように構成されているため、3次元形状の計測に必要な計算処理を省いて撮像領域32内に被写体21が入ってくたことを検出することが可能となり、検出に要する処理量を大幅に削減することが可能となる。これにより、被写体21の検出をリアルタイムに行える画像入力装置を安価に実現することができる。
【0070】更に本実施例によれば、画像入力装置100自体が所定パタンを被写体21へ投光し、撮像領域32内の投光パタン22の変化量を検出して撮影準備を開始するように構成されているため、外部の照明条件に影響されることなく、的確且つ自動的に被写体21を検出し、撮影を実行することができる画像入力装置が実現できる。
【0071】〔第2の実施例〕また、第1の実施例では、図3のステップS104において、撮像画像に対して差分処理又は排他的論理和を行うことで被写体21の検出を行う構成していたが、これを3次元形状を算出して被写体21の検出を行うように構成することも可能である。以下、このように構成した場合を第2の実施例として説明する。尚、このように3次元形状を算出し、これを時系列に沿って比較するように構成した場合、より正確に被写体21の設置の有無を判定することが可能となる。
【0072】以下に、3次元形状の変化を検出する方法の例を示す。撮像領域32に手指31等の物体が進入すると、図6(a),(b)に示すように撮像画像における各点の高さが基準位置(前回の撮像画像(=撮像画像1)における位置)と異なるものとなる。そこで、本実施例では、以下の(式4)を実行することにより、今回の撮像画像(=撮像画像2)における各点の高さの変化を検出し、被写体21が設置されたことを検出する。
|Zt+1(x,y)−Zt(x,y)|>0 …(式4)
但し、(式4)において、Zt+1(x,y)は時刻t+1における画像上の各点(x,y)の高さを表し、Zt(x,y)は時刻tにおける画像上の対応する各点(x,y)の高さを表す。
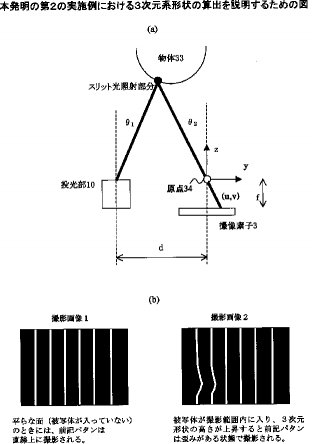
【0073】ここで、本実施例では、第1の実施例と同様に、投光パタン22が縞模様の形状である場合を例に挙げる。従って、撮像領域32に被写体21や手指31等の物体が存在しない場合、撮像画像は図7(b)における撮像画像1に示すように縞模様の形状となる。そこで、図6(b)に示すように撮像領域32に被写体21や手指31等の物体を進入させると、撮像画像は図7(b)における撮像画像2に示すように、縞模様の形状に歪み等の変化が生じ、前回の撮像画像1のパタン形状と異なるものとなる。
【0074】この際の3次元形状の算出方法を図7(a)を用いて説明する。図7(a)において、投光部10から出力された光は、図示しない投光パタンフィルタ12を介して撮像領域32内の物体33に照射される。このように光が照射されることで照らされた物体33上の点は、レンズ1や絞り機構2等の光学系を介して撮像素子3に結像される。
【0075】この際、撮像部11の光学中心を原点34とする座標系を定義し、物体33上の任意の点(x,y)が結像される撮像素子3上の対応する点を(u,v)とすると、物体33の奥行きは、以下の(式5)で表すことができる。
【0076】
【数2】
但し、(式5)においてzは物体33の奥行きであり、また、θ1は投光パタン22を照射した角度であるため、既知な値である。また、θ2は以下の(式6)より求まる角度である。尚、(式6)においてfは撮像部11におけるレンズ1の焦点距離である。
【0077】
【数3】
以上の(式5)及び(式6)よりzが求まると、物体33上の点(x,y)は、次の(式7)及び(式8)により求まる。
【0078】
【数4】
【0079】
【数5】
以上の計算を、撮像画像における全ての点に対して実行することで、撮像領域32内の3次元形状が求められる。また、このような計算より求められた撮像画像1及び2、双方の3次元形状を比較することで、撮像領域32内に被写体21や手指31等の物体33が進入したか否かを正確に判定することが可能となる。
【0080】これにより本実施例では、画像入力装置100自体が所定パタンを被写体21へ投光し、撮像領域32内の投光パタン22の変化量を検出して撮影準備を開始するため、外部の照明条件に影響されることなく、自動的に被写体21を検出し、撮影を実行することができる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0081】〔第3の実施例〕また、上記第1の実施例では、画像ノイズや撮像装置の振動又は撮像装置を置く台の振動によって、時系列毎のパタン光の差分値に差が出てしまい、誤り検出をする可能性がある。このような誤り検出を防止するように構成した場合を第3の実施例として以下に説明する。
【0082】本実施例では、第1の実施例で例示した図3R>3のステップS104において第1の所定の閾値を設け、差分処理又は排他的論理和により求められた変化量がこの第1の所定の閾値を越えたときのみ被写体21が設置されたと判定するよう構成する。これにより本実施例では、ノイズ等による誤認識を防止し、より正確に撮像領域32における被写体21の有無を判定することが可能となる。
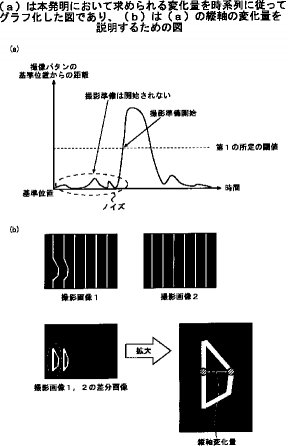
【0083】ここで、図8を用いて本実施例による動作原理を説明する。図8(a)は、図3のステップS104で算出された変化量(各点の基準位置からの距離)を時系列に従ってグラフ化した図である。但し、縦軸の変化量は、各点の基準位置からの距離の平均値であっても積算値であっても、また、結果画像に含まれる画素値の合計値であってもよく、本発明において撮像画像の変化量を数値化した値であれば、その主旨を逸脱しない限り如何なるものを適用することが可能なものである。尚、本実施例では、縦軸の変化量を撮像パタンにおける任意の点の基準位置からの距離とした場合について説明する。
【0084】図8(a)を参照すると、本実施例において第1の所定の閾値は図中破線で示される値に設定されている。また、本実施例では、変化量が第1の所定の閾値をアップエッジでクロスした場合に、図3のステップS104において被写体21が設置されたと判定されて、撮像準備が開始される。これに対し、図8(a)中、第1の所定の閾値をクロスしない変化量、即ち、ノイズとみなせる程度の変化量に対しては、本実施例では撮像動作が開始されない。
【0085】ここで、本実施例による第1の所定の閾値について図8(b)を用いてより詳細に説明する。尚、説明の都合上、図8(b)では、撮影画像1と撮影画像2との排他的論理和により変化量を算出する場合について例を挙げる。
【0086】本実施例では、撮影画像1と撮影画像2との差分画像における対応する点間の距離を変化量(図8(a)における縦軸に対応)とし、この変化量に対して第1の所定の閾値を設定する。第1の所定の閾値の具体例としては例えば10ピクセルとし、対応する点の何れかが10ピクセル以上離れている場合にトリガがかかり、撮影準備が開始される。但し、第1の所定の閾値は、10ピクセルに限定されず、ノイズを除去でき且つ撮影領域32内に被写体21や手指31が進入されたことを検出できる程度の値に設定される。尚、これは実験結果に基づいて経験的に得られた値とすると良い。
【0087】これにより本実施例では、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
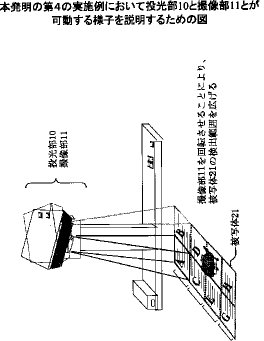
【0088】〔第4の実施例〕また、第4の実施例において、一定時間以上、撮像画像に変化が含まれない際に投光部10及び撮像部11を回転させて、広範囲を対象として撮像を行うよう構成した場合について説明する。即ち、第1の実施例では、撮像時に投光部10と撮像部11とが固定(但し、人為的には可動)されていたが、本実施例では、所定時間、変化が生じない場合に自動的に広範囲を検索するよう投光部10と撮像部11とが回転する。
【0089】図9は、本実施例において投光部10と撮像部11とが可動する様子を説明するための図である。図9に示すように、本実施例では投光部10と撮像部11とが移動部23により揺動することで、広範囲を検索対象としている。
【0090】本実施例による移動部23は、支持部20によって支持されている投光部10及び撮像部11を上下、左右、斜め方向に揺動し、投光軸や撮影光軸を移動させる首振り機構となっている。このように、本実施例では、撮像部11が移動することにより撮像範囲を広げることが可能である。
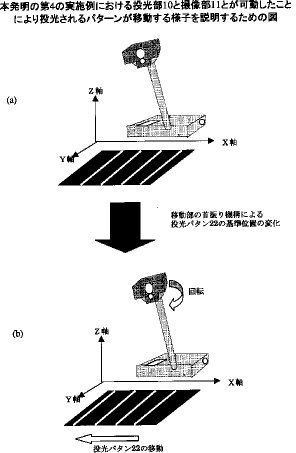
【0091】但し、上記のような移動部23を使用して撮像部11を移動させた場合、投光軸の傾きと撮像部11における原点から底面(被写体21の置き台)までの距離が変化する。これにより、本実施例では投光パタン22が投光される位置が図10(a)から(b)に示すように変化する。
【0092】従って本実施例では、撮像部11を移動させた量に依存して、差分処理又は排他的論理和により得られた結果画像に対する基準位置又は閾値を変化させる。
【0093】ここで、基準位置を変化させる場合では、以下に示す(式9)により、撮像画像における各点の座標を変換する。但し、(式9)は移動部23により撮像光軸をθ傾けた場合の変換式である。
【0094】
【数6】
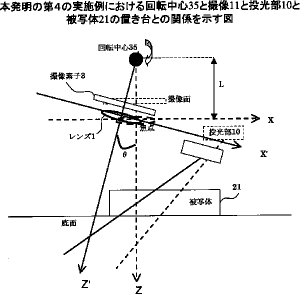
(式9)において、θは上述のように移動部23の回転角度である。また、(x,z)は変換前の光点の座標であり、(x’,z’)は変換後の光点の座標である。更に、Lは移動部23の回転中心35から撮像部11内部における焦点までの距離である。
【0095】また、本実施例における回転中心35と撮像部11と投光部10と被写体21の置き台との関係を図11に示す。図11において、Xは移動部23が回転する以前の座標系での横方向の軸を示し、Zは同じく移動部23が回転する以前の座標系での高さ方向の軸を示す。また、X’は移動部23が回転した後の座標系での横方向の軸を示し、Z’は移動部23が回転した後の座標系での高さ方向の軸を示す。
【0096】従って、上記の(式9)は回転前の座標系での点の位置を回転後の座標系での位置に変換するための式である。この式により、本実施例では前回の撮像画像における各点を回転後の座標系へ変換して、図3におけるステップS104の処理を実行する。
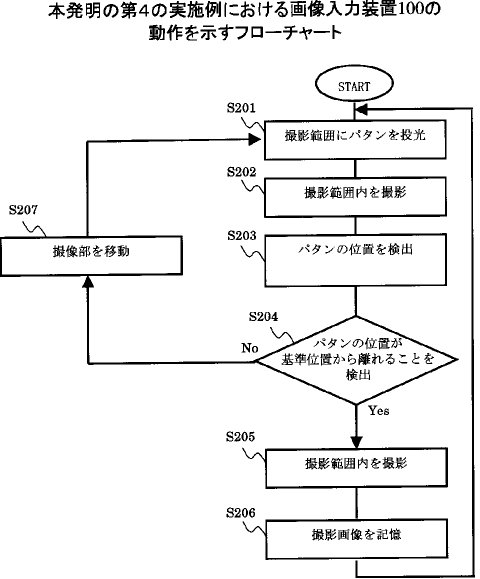
【0097】次に、本実施例による画像入力装置100の動作を図12のフローチャートを用いて詳細に説明する。
【0098】図12を参照すると、本実施例においてステップS201からステップS204は、第1の実施例において図3を用いて説明した動作と同様であるため、ここでは説明を省略する。
【0099】また、本実施例では、ステップS204の判定の結果、撮像領域32内に被写体21が設置されていないと判定された場合(ステップS204のNo)、画像入力装置100は、移動部23を稼働して、投光部10と撮像部11とを回転し、投光パタン22が照射される領域及び撮像領域32を図10に示すように移動する(ステップS207)。その後、画像入力装置100は、ステップS201へ帰還し、以降の動作を実行する。
【0100】但し、本実施例において、ステップS204の判定後にステップS207を実行する条件を、予め設定しておいた所定期間、被写体21の設置が検出されなかった場合のみとすることも可能である。このように構成する場合、ステップS204とステップS207との間に、被写体21の設置が検出されない期間が所定期間継続したか否かを判定するステップを新たに設ける。
【0101】また、ステップS204の判定の結果、被写体21が検出された場合(ステップS204のYes)、画像入力装置100はステップS205以降を実行し、ステップS201へ帰還する。この際の動作の詳細は、第1の実施例で説明した図3のステップS105以降と同様であるため、ここでは説明を省略する。
【0102】また、本実施例でもステップS204の検出において第3の実施例と同様な第1の所定の閾値を設定し、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できるように構成しても良い。
【0103】このように本実施例によれば、移動部23の首振り機構により撮像部11が回転することで、被写体21の検索範囲を広範囲とした画像入力装置が実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
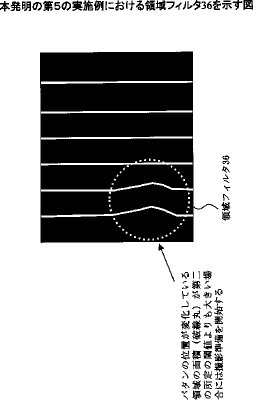
【0104】〔第5の実施例〕また、上記第1から第4の実施例では撮像画像における比較的微小な一部分だけに変化が含まれた場合でも撮像を開始するよう構成されていた。しかしながら、このように、任意の点同士の差分値又は点同士の差分値の合計値を用いて判定すると、画像ノイズによってある任意の点だけが大きく異なった場合等に誤り検出をしてしまう可能性が存在する。そこで以下の第5の実施例では、画像上でパタン光が変化する面積を算出し、その面積が広ければ撮影を開始し、面積が小さければ無視して撮影を開始させないように構成した場合を例に挙げて説明する。
【0105】これを実現するためには、第1の実施例における図3のステップS104において、図13に示すように、所定の大きさであるフィルタ(以下、領域フィルタという)36を用い、この領域フィルタ36に納まる範囲以上に変化が生じた場合のみ、撮像動作を開始するよう構成する。尚、この領域フィルタ36の大きさとしては、例えば撮影画像面積の1/9とするが、これに限定されず、ノイズ等を除去できる大きさで且つ被写体21や手指31の撮像面積以下であれば如何様にも変形して良い。
【0106】従って本実施例では、第1の実施例における図3のステップS104において、結果画像に現れたパタンの領域が領域フィルタ36の範囲内に納まるか否かを判定し、納まらない場合のみ、撮像動作を開始するよう構成される。
【0107】これにより本実施例によれば、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置が実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
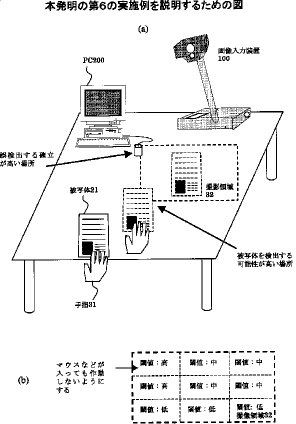
【0108】〔第6の実施例〕また、一般的に、画像入力装置100を設置する環境によって、被写体21が撮像範囲32内に進入してくる方向や、撮像範囲32内における書き込み等がなされる場所に偏りが生じる。
【0109】これを図14を用いて説明する。図14(a)に示す例では、例えば撮像領域32における図中左下側から被写体21が進入する頻度が最も高い。従って、本実施例では、図14(b)に示すように、撮像領域32をいくつかの領域に分割し、各領域毎に上述の第1の所定の閾値のような閾値を設定するよう構成する。但し、本実施例における閾値は、図3のステップS104において求められる結果画像に基づいて被写体21が進入したか否かを判定する際の閾値であり、図14(b)に示すような各領域毎に目的に応じて異なる値が設定されるものである。
【0110】図14(b)に示す例では、撮像領域32中、被写体21が進入する確率の比較的高い下側の領域の閾値を低く設定することで、確実に被写体21が設置されたことを検知し、また、撮像領域32中、PC200側の領域の閾値を高く設定することで、マウス等の対象でない物体により撮像が開始されることを防止する。尚、閾値:高は、例えば30ピクセルとするが、マウス等の対象でない物体が検出されるのを防止し且つ被写体21や手指31を検出できる程度の範囲で設定されればよい。また、閾値:低は、例えば10ピクセルとするが、ノイズによる誤り検出を防止し且つ被写体21や手指31を感度良く検出できる範囲で設定されればよい。更に、閾値:中は、例えば20ピクセルとするが、閾値:高と閾値:低との間の範囲で設定されればよい。
【0111】このように本実施例では、対象外の物体が進入する可能性が高い領域に対する閾値を高く設定することで誤検出を低減させ、反対に被写体21が進入する可能性が高い領域に対する閾値を低く設定することで感度良く且つ的確に被写体21が設置されたことを検出できるように構成する。
【0112】また、図14(b)に示す例では、撮像領域32を9分割し、被写体21が入ってくる可能性の高い撮像領域32左下領域の閾値を低く設定し、被写体21以外の物体が入ってくる可能性の高い撮像領域32左上領域の閾値を高く設定している。
【0113】これにより本実施例では、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
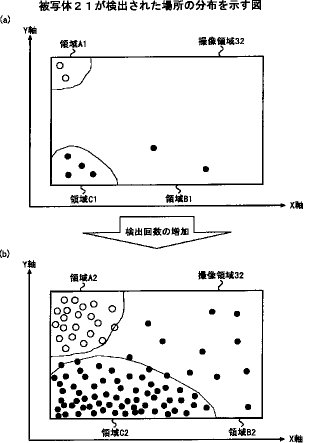
【0114】〔第7の実施例〕また、第6の実施例において、被写体21が検出された場所又は進入してきた方向を記録し、これに基づいて自動的に図14(b)に示す分割された領域毎の閾値を設定するように構成することも可能である。このように構成した場合を第7の実施例として以下に説明する。但し、以下の説明では、被写体21が検出された場所が例えば図15に示すような分布となる場合を例に挙げて説明する。また、撮像領域32は第6の実施例で例示したように分割されているものとする。
【0115】図15(a)は検出回数が比較的少ない場合の分布を示している。また、図15(b)は検出回数が比較的多い場合の分布を示している。
【0116】図15(a),(b)において、検出確率が比較的高いと見なせる領域は、領域C1,C2である。従って、本実施例では、領域C1,C2に対応する撮像領域32内の分割された領域の閾値を、例えば10ピクセル等の比較的低い値に設定する。これは、図2に示すMPU9において判定し、設定するよう構成するとよい。また、検出確率が高いか否かの判定方法としては、例えば単位面積当たりの検出回数と予め設定しておいた回数とを比較することで判定するよう構成するとよい。
【0117】更に、本実施例では、被写体21が被写体21が設置されたと誤って判定した際の検出位置の分布も記録し、これに基づいて対応する領域の閾値を、例えば30ピクセル等の比較的高い値に設定するように構成するとよい。これは、上記と同様な方法で実現することが可能である。
【0118】以上のように検出された頻度によって閾値を変化させることで、図15に示す例では、領域A1,A2の閾値が30ピクセルと設定され、領域C1,C2の閾値が10ピクセルと設定される。また、初期状態(変化させる前)で撮像領域32全体の閾値を例えば20ピクセルとした場合、領域B1,B2の閾値はこの値から変化されず、20ピクセルである。
【0119】このように本実施例では、より多く検出させることで誤り検出される可能性が少なくなる画像入力装置100が実現される。
【0120】これにより本実施例では、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
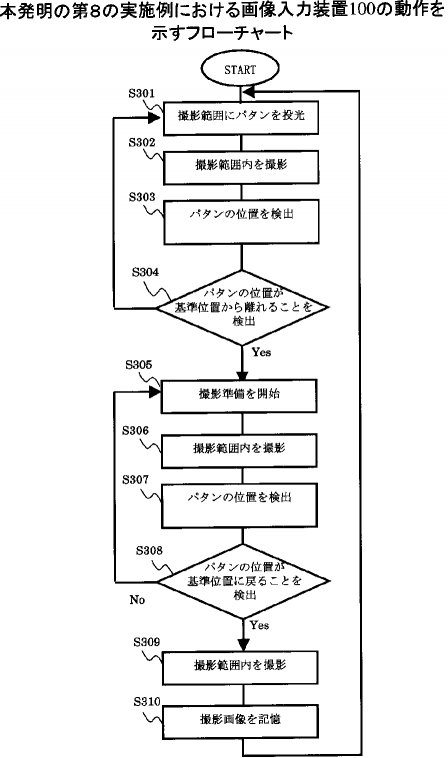
【0121】〔第8の実施例〕また、第1の実施例では、図3のステップS104において被写体21の設置が判定されたことをトリガとして、即ち、撮像画像における撮像パタンに基準位置からの変化が含まれたことをトリガとして、これから所定時間経過後に撮像動作を開始するよう構成していたが、本実施例では、撮像画像における撮像パタンに基準位置からの変化が含まれた後、再度、撮像画像における撮像パタンが上記基準位置(前々回の撮像画像における各光点の位置)に戻ったことをトリガとして、撮像動作を開始するように構成した場合を例に挙げて説明する。
【0122】図16は、本実施例における画像入力装置100の動作を示すフローチャートである。
【0123】図16を参照すると、本実施例においてステップS301からステップS304は、第1の実施例において図3を用いて説明した動作と同様であるため、ここでは説明を省略する。但し、本実施例では、第1の実施例における第1の所定の閾値に代わりに第2の所定の閾値が用いられている。ここで第2の所定の閾値とは、ユーザが被写体21を撮像位置に設置するときに生じるパタンの変化を判定するためのものである。このため、第1の所定の閾値と同様に、第2の所定の閾値はノイズを除去でき且つ撮影領域32内に被写体21や手指31が進入されたことを検出できる程度の値、例えば20ピクセルに設定される。
【0124】本実施例では、ステップS304の判定の結果、撮像領域32内に被写体21が設置されたと判定された場合(ステップS304のYes)、画像入力装置100は撮像準備を開始する(ステップS305)。準備完了後、画像入力装置100は、定期的に撮像範囲32内における被写体21を撮像し(ステップS306)、撮像領域32における投光パタン22の各光点を検出する(ステップS307)。
【0125】このように、再度、撮像した画像における撮像パタンの各光点の位置を検出した画像入力装置100は、ステップS304で基準位置とした光点とステップS307で検出した光点とをそれぞれ比較し、各光点が上記基準位置に戻っているか否かを判定する(ステップS308)。これは、第3の閾値をダウンエッジでクロスしたか否かを判定することで行われる。
【0126】この判定の結果、各光点が上記基準位置に戻ったと判定された場合(ステップS308のNo)、画像入力装置100はステップS305に帰還する。これに対し、ステップS308の判定の結果、各光点が上記基準位置に戻ったと判定された場合(ステップS308のYes)、画像入力装置100は撮像準備を開始し、準備完了後、所定の時間が経過した後に撮像範囲32内における被写体21を撮像する(ステップS309)。
【0127】その後、画像入力装置100は、ステップS309で取得した画像信号に対してCDS4,A/D変換器5,IPP7により所定の処理を施し、画像データとしてメモリ8に保存する(ステップS310)。但し、ステップS310では、画像データをメモリ8に保存するのでなく、I/F部24を介して接続されたPC等の外部機器へ送信するよう構成してもよい。
【0128】このように本実施例では、投光パタン22が再び基準位置に戻るまで撮影動作を開始するのを待ち、基準位置に戻ったことをトリガとして撮影を開始する。
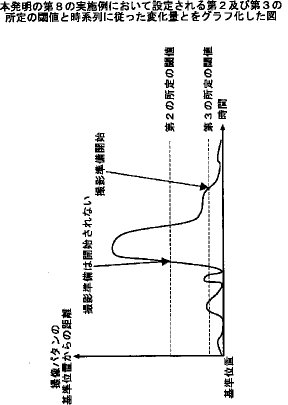
【0129】また、図16のステップS308の判定において、図17に示すような第3の所定の閾値を設定し、この第3の所定の閾値を変化量がダウンエッジでクロスした場合に、各光点が上記基準位置に戻ったと判定されるよう構成するとよい。これにより、外部からの振動や画像ノイズに影響され、被写体21の設置が完了しても撮影動作が開始されないという不具合を回避することが可能となる。尚、第3の所定の閾値とは、ユーザが被写体21を撮影位置に設置し終わったかを判定するためのものである。このため、第3の所定の閾値は手指31による変化量のピーク値以下の値、例えば5ピクセルに設定される。
【0130】また、図17に示す例では、撮影動作を開始するために使用する第3の所定の閾値が撮影準備を開始するために使用する第2の所定の閾値よりも高くなるよう設定されているが、これを、撮影動作を開始するために使用する第3の所定の閾値が撮影準備を開始するために使用する第2の所定の閾値よりも高くなるように設定してもよい。
【0131】これにより本実施例では、撮像準備を開始した後に投光パタン22が基準位置に戻るまで撮像動作を待機させることにより、手指31などの不必要な物体が撮影されることを防止する画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
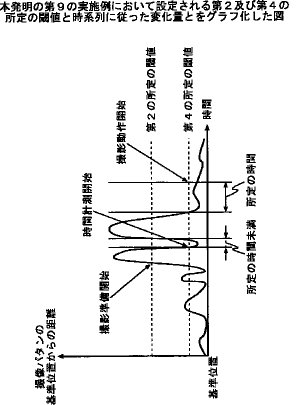
【0132】〔第9の実施例〕また、第8の実施例では、被写体21に厚さがある場合、被写体21の設置を完了しても投光パタン22が基準位置に戻らず撮影動作が開始されない可能性が存在する。このため、本実施例では、図16のステップS308の判定において、第3の所定の閾値の代わりに図18に示すような第4の所定の閾値を設定し、第2の所定の閾値に基づいて撮像準備が開始された後に、再度撮影された画像を使用して、時系列毎の投光パタン22の変化量を測定し、これに基づいて被写体21が設置し終わったか否かを判定するよう構成する。但し、この際、再度撮影された画像を使用して時系列毎の投光パタン22の変化量を測定する方法としては、図5で説明したような差分処理や排他的論理和等を利用することが可能である。また、第4の所定の閾値は、時系列毎のパタン光の差分値の変化を判定するためのものである。このため、ノイズレベル近辺の範囲、例えば5ピクセルに設定されるとよいが、これに限定されず、手指31による変化量のピーク値以下の値であればよい。
【0133】また、被写体21が設置し終わったか否かの判定においては、再度の撮像から求められた変化量が第4の所定の閾値より低い状態が一定時間以上継続したか否かに基づいて判定するよう構成するとよい。即ち、一定時間以上、撮像領域32内に何も進入されなかった場合に、本実施例では図16におけるステップS309以降の処理を実行する。
【0134】これにより本実施例では、被写体21が厚さを有する物体であっても、確実に撮影動作を開始させることが可能となる。
【0135】このように本実施例では、撮像準備を開始した後に投光パタン22の位置変化がない状態が一定時間以上継続するまで撮影開始を待機するため、厚みがある被写体21に対しても確実に撮像動作を実行し、且つ、手指31等の不必要な物体が撮影されることを防止する画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
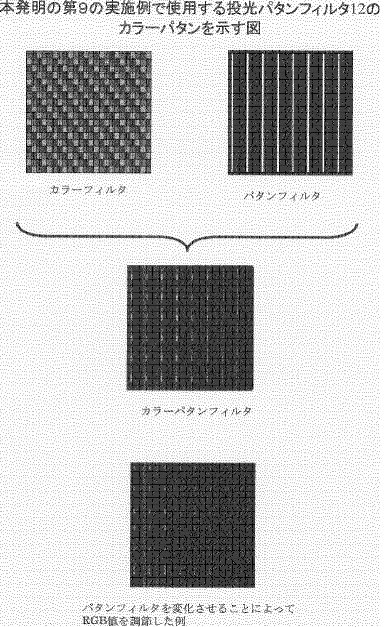
【0136】〔第10の実施例〕また、上記した投光パタン22をカラーとすることも可能である。以下、本実施例において、カラーの投光パタン22を適用した場合を例に挙げて説明する。
【0137】本実施例では、図2における投光パタンフィルタ12を、図19に示すようなカラーパタンを有するカラー液晶パネルを用い、投光部10から照射された光をカラー液晶パネルを介することで、被写体21に照射される投光パタン22がカラーとなるよう構成する。ここで、投光パタンフィルタ12のカラーパタンは、図1R>1における検出方法切替スイッチにより設定された検出方法に対応して自動的に設定されるよう構成するとよい。
【0138】また、投光パタンフィルタ12のカラーパタンを変化させる方法としては、例えば投光パタンフィルタ12に印加する電圧を制御してカラー液晶パネルのR,G,B値をそれぞれ調節することにより実現することが可能である。
【0139】本実施例では、このように投光する投光パタン22のカラーパタンを変化させ、特定の色である物体33だけからの反射光を撮像するよう構成することで、特定の色がついた物体33の投光パタン22の変化量のみを検出するよう構成することが可能である。
【0140】また、特定の色がついた物体から反射される投光パタン22の変化量を検出する他の方法としては、画像処理時に被写体21から反射された投光パタン22の色を識別することより、投光パタンフィルタ12としてカラー液晶パネル等のカラーフィルタを使用せずに特定の色の被写体21だけを検出する方法を適用することも可能である。
【0141】このように本実施例では、投光する投光パタン22を所定のカラーパタンとすることで被写体21から特定の色のみを反射させる、又は投光パタン22の反射光の色だけを検出するため、所定の色の被写体21だけを検出し、被写体21の誤検出を回避することを可能にする画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0142】〔第11の実施例〕また、被写体21が撮像領域32内に設置されたか否かを判定する際に用いる撮像画像の解像度は、保存するために撮像する画像の解像度よりも低くても構わない。
【0143】従って、本実施例では、第1の実施例における図3のステップS102で撮影する際と、同図ステップS105で撮影する画像の解像度とを切り替える手段を撮像部11に設け、ステップS102での撮像における解像度を低く設定するよう動作する。
【0144】これにより、本実施例では、被写体21の設置の有無を判定する処理におけるデータ量を削減し、より迅速に動作する画像入力装置100を提供することが可能である。
【0145】但し、上記の解像度を切り替える手段は、図2におけるMPU9が撮像素子3より取得する画像信号を間引くよう動作することで実現することが可能である。
【0146】このように本実施例では、被写体21の検出時に低い解像度で撮像画像を取得することで処理データが少なくなるため、リアルタイムで被写体21を検出することができる画像入力装置を安価に作成することが可能となる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0147】〔第12の実施例〕また、上記した各実施例において、自動的に撮像を行うモード(以下、自動撮像モードという)の有効/無効を切り替える撮像モード切替スイッチ15を図1に示すように設けることで、ユーザの意図したときにのみ自動的な撮像がなされるよう構成することも可能である。
【0148】但し、本実施例では、撮像モード切替スイッチ15により設定された自動撮像モードの有効/無効の設定が図2におけるMPU9に入力され、MPU9において撮像部11及び投光部10が設定に応じた制御をなされることで実現されるものである。
【0149】このように本実施例では、撮像モード切替スイッチ15を設けるため、ユーザの意図したときにのみ自動撮像機能が実行される画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0150】〔第13の実施例〕更に、上記した各実施例において、ユーザが検出方法を切り替えるための検出方法切替スイッチ16を図1に示すように設けることで、ユーザが意図する検出方法で被写体21の有無の検出がなされるよう構成することも可能である。
【0151】ここで、検出方法切替スイッチ16により選択される選択肢の例としては、上記何れかの実施例で例示したような、検出速度を向上させるために投光パタン22の各光点の位置変化量を検出に利用する方法や正確に被写体21を検出するために3次元形状の変化量を基準とする方法等を選択するための選択肢や、ユーザが被写体21を設定し終わることを検出してから撮影動作を実行する方法を設定するための選択肢や、検出する際に使用される閾値を選択するための選択肢等が挙げられる。
【0152】また、検出方法切替スイッチ16により選択された設定は、図2におけるMPU9に入力される。従って、MPU9は、入力された設定に応じて投光部10や撮像部11を制御し、ユーザの意図にあった動作を実現する。
【0153】このように本実施例では、被写体21の検出方法切替スイッチ16を設けるため、ユーザの意図した検出方法等の設定で被写体21を検出することで、被写体21設置の誤検出を低減させた画像入力装置が実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0154】〔他の実施例〕また、上記した各実施例は、本発明を好適に実施した形態の一例に過ぎない。即ち、本発明は、その主旨を逸脱しない限り、種々変形して実施することが可能なものである。
【0155】
【発明の効果】以上説明したように、請求項1記載の発明によれば、被写体の検出をリアルタイムに行う画像入力装置を提供することが可能となる。
【0156】即ち、時系列毎に撮影されたパタンの変化量を検出して撮影準備を開始するよう構成することで、3次元形状の計測に必要な計算処理を省いて撮像領域内に被写体が入ってくることを検出することが可能となり、被写体の検出がリアルタイムに行うことができる画像入力装置を安価に実現することができる。
【0157】更に請求項1記載の発明によれば、画像入力装置自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0158】また、請求項2記載の発明によれば、被写体の検出をリアルタイムに行う画像入力装置を安価に提供することが可能となる。
【0159】即ち、画像入力装置100自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0160】更に、請求項3記載の発明によれば、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0161】更に、請求項4記載の発明によれば、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0162】更に請求項4記載の発明によれば、撮像領域を移動させることで、被写体の検索範囲を広範囲とした画像入力装置が実現できる。
【0163】更に、請求項5記載の発明によれば、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0164】更に、請求項6記載の発明によれば、撮像準備を開始した後に投光したパタンが基準となる位置に戻るまで撮像動作を待機させることにより、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【0165】更に、請求項7記載の発明によれば、撮像準備を開始した後に投光したパタンの位置変化がない状態が一定時間以上継続するまで撮影開始を待機することにより、厚みがある被写体に対しても確実に撮像動作を実行し、且つ、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【図面の簡単な説明】
【図1】本発明の第1の実施例による画像入力装置100の外観を示す俯瞰図である。
【図2】画像入力装置100における撮像部11の構成を示すブロック図である。
【図3】本発明の第1の実施例による画像入力装置100の動作を示すフローチャートである。
【図4】撮像領域32に被写体21が設置される際の様子を説明するための図である。
【図5】図3のステップS104における判定処理の一例を説明するための図である。
【図6】3次元形状の変化を検出する際の動作の概略を説明するための図である。
【図7】本発明の第2の実施例における3次元形状の算出を説明するための図である。
【図8】(a)は本発明において求められる変化量を時系列に従ってグラフ化した図であり、(b)は(a)の縦軸の変化量を説明するための図である。
【図9】本発明の第4の実施例において投光部10と撮像部11とが可動する様子を説明するための図である。
【図10】本発明の第4の実施例において投光部10と撮像部11とが可動したことにより投光されるパターンが移動する様子を説明するための図である。
【図11】本発明の第4の実施例における回転中心35と撮像部11と投光部10と被写体21の置き台との関係を図11に示す。
【図12】本発明の第4の実施例における画像入力装置100の動作を示すフローチャートである。
【図13】本発明の第5の実施例における領域フィルタ36を示す図である。
【図14】本発明の第6の実施例を説明するための図である。
【図15】被写体21が検出された場所の分布を示す図である。
【図16】本発明の第8の実施例における画像入力装置100の動作を示すフローチャートである。
【図17】本発明の第8の実施例において設定される第2及び第3の所定の閾値と時系列に従った変化量とをグラフ化した図である。
【図18】本発明の第9の実施例において設定される第2及び第4の所定の閾値と時系列に従った変化量とをグラフ化した図である。
【図19】本発明の第9の実施例で使用する投光パタンフィルタ12のカラーパタンを示す図である。
【符号の説明】
1 レンズ
2 絞り機構
3 撮像素子
4 CDS
5 A/D変換器
6 TG
7 IPP
8 メモリ
9 MPU
10 投光部
11 撮像部
12 投光パターン
15 撮像モード切替スイッチ
16 検出方法切替スイッチ
17 色指定切替スイッチ
20 支持部
21 被写体
22 投光パターン
23 移動部
24 I/F部
31 移動手段
32 撮像領域
33 物体
34 原点
35 回転中心
36 領域フィルタ
200 PC
【0001】
【発明の属する技術分野】本発明は、画像入力装置に関し、特に、被写体を自動的に撮像する画像入力装置に関する。
【0002】
【従来の技術】紙面等に描かれた画像を電子データ化し、有効に活用するための技術として、例えば特開平9−102013号公報が開示するところの、ビデオカメラを用いて時系列に沿って撮影された画像データの画素値を監視することにより、ユーザが筆記した筆跡情報を検出して、文字・図形認識を行う技術が存在する(以下、従来技術1という)。
【0003】この従来技術1が開示するところの技術は、撮像時に既に対象物がビデオカメラに対して設置されており、これに筆記された情報を記録するためのものである。
【0004】また、近年、雑誌や新聞等を電子画像データとして取り込み、これを用いてプレゼンテーション用の資料を作成することや、インターネット等を介するwebページ等に掲載する機会が多くなってきている。
【0005】例えば、日本電気株式会社(商標登録)から提供された「アクティブカメラを用いた文書画像の高精細入力と認識応用」(信学技法PRMU99−76, 1999−09)では、ビデオカメラを被写体の上方に設置し、ユーザが手指で指し示した被写体の一部分だけを高解像度の画像データとして撮影する技術が開示されている(以下、従来技術2という)。より詳細には、撮影画像を2値化して手指が指し示した場所を検出するものである。
【0006】また、以上のような技術において、原稿画像を上方から撮影する撮像装置が用いられている場合、被写体の形状を保持するために使用する手指が撮像エリアに入ってしまい、正確に被写体を撮影できないという不具合が存在するが、特開平6−105091号公報では、手指の位置を撮影画像の輝度ヒストグラムより検出し、手指部分の画像を消去することで、このような不具合を解決する技術が開示されている(以下、従来技術3という)。
【0007】また、特開平6−102993号公報では、ビデオカメラを被写体の上方に設置し、時系列に沿って撮影した被写体画像同士の差分処理を行うことにより被写体の動きを検出する技術が開示されている(以下、従来技術4という)。
【0008】更に、特開平9−307712号公報や特開平10−304130号公報では、複数の測距センサにより測定された被写体との距離の変化から原稿のページがめくられた方向を判定し、このページめくり方向から読み取るべき画像の並び順を判定して、この並び順に基づいて読み取った画像の出力制御を行う技術が開示されている(以下、従来技術5という)。
【0009】更にまた、特開平10−267832号公報では、2台のカメラを用いて3次元形状を計測することにより被写体の3次元形状を認識して、パーソナルコンピュータ(以下、PCという)に任意の作業を命令する技術が開示されている(以下、従来技術6という)。
【0010】
【発明が解決しようとする課題】しかしながら、例えば従来技術2が開示するところの技術では、被写体の所定の領域を自動的に記録するためのトリガに、撮影した被写体画像の輝度値の変化を用いているため、撮影範囲にユーザの影が誤って映り込むことにより不要に記録が開始されてしまうという問題が存在する。
【0011】また、従来技術3及び従来技術4が開示するところの技術においても同様に、撮影した被写体画像の輝度値の変化をトリガとして被写体の記録を開始するため、外部の照明条件等の変化によって誤って記録が開示されてしまうという問題が存在する。
【0012】更に、従来技術5が開示するところの技術は、本等のページめくりに限定した技術であり、撮影範囲内に被写体が進入したことを自動的に検出して撮影を開始する構成となっていない。また、ページめくりの検出には撮像部から被写体までの距離を計測した結果を利用しているため、安価な計算装置であると距離計測を行うのに時間がかかり、リアルタイムに検出することが困難であるという不具合が存在する。
【0013】また、従来技術6が開示することころの技術では、2台以上のカメラを使用して3次元形状を計測し、ユーザの命令を認識するものであるため、3次元形状の計測に要する計算処理内容が多く、安価な計算装置であるとリアルタイムに3次元形状を計測できないという問題が存在する。
【0014】本発明は上記問題に鑑みてなされたものであり、被写体の検出をリアルタイムに行う画像入力装置を提供することを目的とする。
【0015】
【課題を解決するための手段】係る目的を達成するために、請求項1記載の発明は、撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段が、所定期間毎に前記撮像領域内の前記パタンを取得し、該パタンの第1の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴としている。
【0016】これにより、請求項1記載の発明では、被写体の検出をリアルタイムに行う画像入力装置を提供することが可能となる。
【0017】即ち、時系列毎に撮影されたパタンの変化量を検出して撮影準備を開始するよう構成することで、3次元形状の計測に必要な計算処理を省いて撮像領域内に被写体が入ってくることを検出することが可能となり、被写体の検出がリアルタイムに行うことができる画像入力装置を安価に実現することができる。
【0018】更に請求項1記載の発明では、画像入力装置自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0019】また、請求項2記載の発明は、撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、前記撮像領域内の3次元形状を計測する3次元形状計測手段と、該3次元形状計測手段により計測された前記撮像領域内の3次元形状に基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段が、前記3次元形状計測手段により計測された前記撮像領域内の3次元形状の第2の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴としている。
【0020】これにより、請求項2記載の発明では、被写体の検出をリアルタイムに行う画像入力装置を安価に提供することが可能となる。
【0021】即ち、画像入力装置100自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0022】更に、請求項3記載の発明は、前記被写体検出手段が、前記第1又は第2の変化を数値化し、数値化した値が第1のしきい値よりも大きい場合、前記撮像領域内に前記被写体が設置されたと判定することを特徴としている。
【0023】これにより、請求項3記載の発明では、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0024】更に、請求項4記載の発明は、前記撮像領域を移動させる領域移動手段を有し、前記第1のしきい値が、前記領域移動手段により移動した前記撮像領域の位置に基づいて変化することを特徴としている。
【0025】これにより、請求項4記載の発明では、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0026】更に請求項4記載の発明では、撮像領域を移動させることで、被写体の検索範囲を広範囲とした画像入力装置が実現できる。
【0027】更に、請求項5記載の発明は、前記被写体検出手段が、前記撮像領域における前記第1又は第2の変化が含まれる領域が所定の面積以上である場合、該撮像領域内に前記被写体が設置されたと判定することを特徴としている。
【0028】これにより、請求項5記載の発明では、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0029】更に、請求項6記載の発明は、前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第3の変化又は前記3次元形状計測手段により計測された3次元形状の第4の変化を数値化した値が、第2のしきい値以下となったことを検出する検出手段を有し、前記第3又は第4の変化が、前記第1又は第2の変化を判定するにあたり使用したパタン又は3次元形状に対する変化であり、前記撮像手段が、前記検出手段により前記第3又は第4の変化を数値化した値が前記第2のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴としている。
【0030】これにより、請求項6記載の発明では、撮像準備を開始した後に投光したパタンが基準となる位置に戻るまで撮像動作を待機させることにより、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【0031】更に、請求項7記載の発明は、前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第5の変化又は前記3次元形状計測手段により計測された3次元形状の第6の変化を数値化した値が、第3のしきい値以下となったことを検出する検出手段を有し、前記第5又は第6の変化が、前記前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後の前記撮像領域内の変化であり、前記撮像手段が、前記検出手段により前記第5又は第6の変化を数値化した値が前記第3のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴としている。
【0032】これにより、請求項7記載の発明では、撮像準備を開始した後に投光したパタンの位置変化がない状態が一定時間以上継続するまで撮影開始を待機することにより、厚みがある被写体に対しても確実に撮像動作を実行し、且つ、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【0033】
【発明の実施の形態】〔本発明の特徴〕本発明を説明するにあたり、本発明の特徴について先に述べる。
【0034】本発明は、撮像領域内に設置された被写体への書込内容を自動的に検出し、これを電子化するものである。これを実現するために本発明は、撮像領域に所定パタンの光を投影し、これを撮像する。また、撮像したパタンを時系列に沿って比較することで、撮像した画像中に生じた変化量を算出する。これにより本発明では、撮像領域内に被写体となる物体が設置されたか否かを判別することができ、自動的に撮像を開始することが可能となる。
【0035】また、撮像領域内へ投影する所定パタンの光は、画像入力装置又は撮像装置内に設けた光源から照射する。これにより本発明では、外部の照明条件等に影響されずに、自動的且つリアルタイムに被写体の有無を検出することが可能となる。
【0036】更に本発明では、撮像領域内に被写体が設置されたか否かを判定する際のデータの処理量を比較的少なくする。これにより本発明では、処理能力が比較的低い安価なコンピュータを用いても、リアルタイムな動作を実現することができる。
【0037】以下、本発明を好適に実施した形態について、図面を用いて詳細に説明する。但し、以下の説明では、本発明を画像入力装置に適用した場合について例示するが、これを撮像装置としても同様に実施することができるものである。
【0038】〔第1の実施例〕まず、本発明を好適に実施した形態について、以下に図面を用いて詳細に説明する。
【0039】・画像入力装置100の構成図1は、本実施例による画像入力装置100の外観を示す俯瞰図である。図1を参照すると、画像入力装置100は、撮像領域へ所定パタン(投光パタン22)の光を照射する投光部10と、投光パタン22の光が照射された被写体21を撮像する撮像部11と、以下で説明する実施例により提供される撮像モードを切り替えるための撮影モード切替スイッチ15と、被写体21の有無を検知する方法を切り替えるための検出方法切替スイッチ16と、投光パタン22における色指定を切り替えるための色指定切替スイッチ17と、投光部10及び撮像部11の方向や位置を移動させる移動部23と、投光部10と撮像部11と移動部23とを支持する支持部20と、外部に設けられたPC(パーソナルコンピュータ)等の情報処理機器とデータを送受信するためのI/F部24と、を有して構成される。
【0040】また、画像入力装置100は、撮像モード切替スイッチ15と検出方法切替スイッチ16と色指定切替スイッチ17とが表示画面つきのタッチパネルなどで構成されており、所望の撮像モード、検出方法、3次元形状の計測に使用する投光パタン22の色等を設定できるように構成されている。
【0041】また、画像入力装置100と外部のPC等とは、取得した画像データの送受信やその他、コマンド等のデータの送受信をI/F24を介して行う。
【0042】図2に画像入力装置100における撮像部11の構成を説明するためのブロック図を示す。図2を参照すると、撮像部11は、レンズ1と絞り機構2と撮像素子3とCDS(相関二重サンプリング回路)4とA/D変換器5とTG(タイミングジェネレータ)6とIPP(画像前処理回路)7とメモリ8とMPU9とを有して構成される。
【0043】この構成において、被写体21の画像はレンズ1及び絞り機構2を介して撮像素子3上に形成される。撮像素子3からの画像信号はCDS4でサンプリングされ、その後、A/D変換器5においてデジタル信号化される。また、この処理におけるタイミングはTG6において生成される。
【0044】A/D変換器5から出力された画像信号はIPP7へ入力され、IPP7においてアパーチャ補正等の画像処理、圧縮処理等が行われた後、メモリ8に保存される。
【0045】また、上記構成において各ブロック(ユニットともいう)の動作は、MPU9により制御される。更に、MPU9は投光部10も制御する。従って、投光部10はMPU9により制御されたタイミングで光を出力する。
【0046】また、投光部10には投光パタンフィルタ12が設けられており、被写体21に照射する光が特定のパタン(投光パタン22)となるように整形される。但し、本実施例における投光パタン22としては、図5に示すような縞模様の形状であっても、他の形状であってもよい。
【0047】・画像入力装置100の動作次に、本実施例による画像入力装置100の動作について図面を用いて詳細に説明する。
【0048】図3は図1における被写体21が撮像領域32に入ったことを検出して、画像入力装置100が自動的に撮像動作を実行する際の動作を示すフローチャートである。
【0049】本実施例において、ユーザが被写体21を画像入力装置100の撮像領域32に設置する際には、図4に示すように、被写体21を移動させるために必要となる手段、例えば手指や棒等、被写体21と異なる3次元形状を有する物体が画像入力装置100の撮像領域32内に進入する。尚、以下の説明では被写体21の挿入時にユーザの手指31が進入する場合を例示する。
【0050】従って、画像入力装置100は、投光部10により投光されている投光パタン22の位置変化により手指31が撮像領域32への進入したことを検出し、これに基づいて、撮像領域32内に被写体21が設置されたことを判定する。
【0051】図4に示す動作ではまず、投光部10から光が出力され、これが投光パタンフィルタ12を介して撮像領域32に照射される(ステップS101)。次に、画像入力装置100は撮像部11で撮像領域32内の画像(撮像画像又は画像信号ともいう)を取得することでステップS101で投光した投光パタン22を撮像し(ステップS102)、撮像画像におけるパタン(撮像パタン)のそれぞれの光の点(光が照射されている点:以下、光点という)の位置を検出する(ステップS103)。
【0052】その後、画像入力装置100は、検出した撮像パタンの光点の位置が前回撮像した画像における各光点の位置(これを基準位置とする)からはずれているか否かを判定する(ステップS104)。但し、第1回目は、判定処理が省略されるか、又は、予め登録されている位置との比較が行われるよう構成するとよい。
【0053】また、ステップS104における処理を、検出された撮像パタンに基づいて撮像画像における3次元形状を算出してから被写体の有無を判定するように構成した場合、必要となる処理量が増加するため、本実施例ではステップS104において3次元形状の算出を行うことなく、簡易に被写体の有無を判定できるように構成する。この説明は、後述において図5を用いて詳細に説明する。
【0054】尚、ステップS101からステップS104までの動作は、ステップS104において光点が基準位置から離れていると判定されるまで所定周期毎に実行される(ステップS104のNo)。
【0055】これに対し、ステップS104の判定の結果、撮像領域32内に被写体が設置されたと判定した場合(ステップS104のYes)、画像入力装置100は撮像準備を開始し、準備完了後、所定の時間が経過した後に撮像範囲32内における被写体21を撮像する(ステップS105)。ここで、撮像準備の一例としては、被写体21のエッジ情報からカメラの焦点を調整することや、外光から露出補正を行うこと等が挙げられる。これにより、瞬時に被写体21を撮影できる状態としておくことができる。
【0056】その後、画像入力装置100は、ステップS105で取得した画像信号に対してCDS4,A/D変換器5,IPP7により所定の処理を施し、画像データとしてメモリ8に保存する(ステップS106)。但し、ステップS106では、画像データをメモリ8に保存するのでなく、I/F部24を介して接続されたPC等の外部機器へ送信するよう構成してもよい。
【0057】このようにステップS106において撮像した画像を保存した後、画像入力装置100は、ステップS101へ帰還し、上記の動作を繰り返す。
【0058】次に、図5を用いて図4におけるステップS104の判定処理の例を説明する。尚、図5に示す方法では、撮像画像に基づいて3次元形状の算出を行うことなく、前回の撮像画像(今回実行したステップS101〜104より前であって、最後に実行されたステップS101〜ステップS104により取得された画像)との差分処理を行うことで、被写体21が撮像範囲32に設置されたことを検出する。
【0059】図5(a)は、本判定処理に撮像画像の差分処理を適用した場合の例である。但し、図5(a)は撮像範囲32内に被写体21が設置されていない場合を示すものである。
【0060】この際の差分処理は以下の(式1)で示されるものとなる。
Imagex,y,t−Imagex,y,t+1>0 …(式1)
(式1)において、Imagex,y,tは時刻tに撮像された画像(これを前回の分とする:画像1)における各点(x,y)の画素値を示し(xは任意の画素のx方向の位置,yは任意の画素のy方向の位置)、Imagex,y,t+1は時刻t+1に撮像された画像(これを今回の分とする:画像2)における対応する各点(x,y)の画素値を示す。
【0061】この計算によれば、図5(a)に示す例では、前回の画素値と今回の画素値とに差分が生じていないため、(式1)の差分処理の結果による結果画像において撮像パタンの撮像画像が検出されない。
【0062】これに対し、前回の撮像画像(画像1)と今回の撮像画像(画像2)とに差分が存在する場合の例を図5(b)を用いて説明する。
【0063】図5(b)を参照すると、画像2における撮像パタンと画像1における撮像パタンとに差分が生じている。このため、(式1)に示す差分処理を行った結果として得られる結果画像には、画像1における画像2と異なる部分が残る。但し、本実施例では、(式1)に示す差分処理において負の値を破棄するものとする。このため、画像2における画素値は破棄されて結果画像に含まれない。
【0064】このように画像1と画像2との間に差分が生じ、結果画像に撮像パタンの一部又は全部が残った場合、画像入力装置100は、撮像領域32に手指31が進入し、被写体21が設置された(ステップS104のYes)と判定する。
【0065】上記図5(a),(b)で示した差分処理を適用する利点としては、投光パタン22が照射されている部分である基準位置の画像情報だけで、撮像範囲32内に被写体21が設置されたか否かを判定することが可能なため、被写体21の検出処理に要するデータ量が比較的少量で済む点である。
【0066】また、(式1)で示した差分処理において、項を入れ換えることも可能である。これを以下(式2)に示す。
Imagex,y,t+1−Imagex,y,t>0 …(式2)
このように、差分処理を画像2から画像1を引算するよう構成することで、図5(c)に示すように、差分処理後に残る撮像パタンの各光点の位置から3次元形状の変化量を推測することが可能となる。
【0067】次に、排他的論理和を適用した場合の例を図5(d)に示す。図5(d)に示す例では、時系列に沿って撮像した画像を2値化処理した後に、(式3)に示す排他的論理和の式の左辺を実行する。
【0068】
【数1】
この演算の結果、(式3)を満足する場合、画像入力装置100はステップS104において、撮像領域32内に被写体21が設置されたと判定する。この排他的論理和を適用した場合でも、演算後に残る撮像パタンの各光点の位置から3次元形状の変化量を推測することが可能となる。
【0069】このように本実施例では、時系列に沿って撮影された投光パタン22の変化量を検出して撮影準備を開始するように構成されているため、3次元形状の計測に必要な計算処理を省いて撮像領域32内に被写体21が入ってくたことを検出することが可能となり、検出に要する処理量を大幅に削減することが可能となる。これにより、被写体21の検出をリアルタイムに行える画像入力装置を安価に実現することができる。
【0070】更に本実施例によれば、画像入力装置100自体が所定パタンを被写体21へ投光し、撮像領域32内の投光パタン22の変化量を検出して撮影準備を開始するように構成されているため、外部の照明条件に影響されることなく、的確且つ自動的に被写体21を検出し、撮影を実行することができる画像入力装置が実現できる。
【0071】〔第2の実施例〕また、第1の実施例では、図3のステップS104において、撮像画像に対して差分処理又は排他的論理和を行うことで被写体21の検出を行う構成していたが、これを3次元形状を算出して被写体21の検出を行うように構成することも可能である。以下、このように構成した場合を第2の実施例として説明する。尚、このように3次元形状を算出し、これを時系列に沿って比較するように構成した場合、より正確に被写体21の設置の有無を判定することが可能となる。
【0072】以下に、3次元形状の変化を検出する方法の例を示す。撮像領域32に手指31等の物体が進入すると、図6(a),(b)に示すように撮像画像における各点の高さが基準位置(前回の撮像画像(=撮像画像1)における位置)と異なるものとなる。そこで、本実施例では、以下の(式4)を実行することにより、今回の撮像画像(=撮像画像2)における各点の高さの変化を検出し、被写体21が設置されたことを検出する。
|Zt+1(x,y)−Zt(x,y)|>0 …(式4)
但し、(式4)において、Zt+1(x,y)は時刻t+1における画像上の各点(x,y)の高さを表し、Zt(x,y)は時刻tにおける画像上の対応する各点(x,y)の高さを表す。
【0073】ここで、本実施例では、第1の実施例と同様に、投光パタン22が縞模様の形状である場合を例に挙げる。従って、撮像領域32に被写体21や手指31等の物体が存在しない場合、撮像画像は図7(b)における撮像画像1に示すように縞模様の形状となる。そこで、図6(b)に示すように撮像領域32に被写体21や手指31等の物体を進入させると、撮像画像は図7(b)における撮像画像2に示すように、縞模様の形状に歪み等の変化が生じ、前回の撮像画像1のパタン形状と異なるものとなる。
【0074】この際の3次元形状の算出方法を図7(a)を用いて説明する。図7(a)において、投光部10から出力された光は、図示しない投光パタンフィルタ12を介して撮像領域32内の物体33に照射される。このように光が照射されることで照らされた物体33上の点は、レンズ1や絞り機構2等の光学系を介して撮像素子3に結像される。
【0075】この際、撮像部11の光学中心を原点34とする座標系を定義し、物体33上の任意の点(x,y)が結像される撮像素子3上の対応する点を(u,v)とすると、物体33の奥行きは、以下の(式5)で表すことができる。
【0076】
【数2】
但し、(式5)においてzは物体33の奥行きであり、また、θ1は投光パタン22を照射した角度であるため、既知な値である。また、θ2は以下の(式6)より求まる角度である。尚、(式6)においてfは撮像部11におけるレンズ1の焦点距離である。
【0077】
【数3】
以上の(式5)及び(式6)よりzが求まると、物体33上の点(x,y)は、次の(式7)及び(式8)により求まる。
【0078】
【数4】
【0079】
【数5】
以上の計算を、撮像画像における全ての点に対して実行することで、撮像領域32内の3次元形状が求められる。また、このような計算より求められた撮像画像1及び2、双方の3次元形状を比較することで、撮像領域32内に被写体21や手指31等の物体33が進入したか否かを正確に判定することが可能となる。
【0080】これにより本実施例では、画像入力装置100自体が所定パタンを被写体21へ投光し、撮像領域32内の投光パタン22の変化量を検出して撮影準備を開始するため、外部の照明条件に影響されることなく、自動的に被写体21を検出し、撮影を実行することができる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0081】〔第3の実施例〕また、上記第1の実施例では、画像ノイズや撮像装置の振動又は撮像装置を置く台の振動によって、時系列毎のパタン光の差分値に差が出てしまい、誤り検出をする可能性がある。このような誤り検出を防止するように構成した場合を第3の実施例として以下に説明する。
【0082】本実施例では、第1の実施例で例示した図3R>3のステップS104において第1の所定の閾値を設け、差分処理又は排他的論理和により求められた変化量がこの第1の所定の閾値を越えたときのみ被写体21が設置されたと判定するよう構成する。これにより本実施例では、ノイズ等による誤認識を防止し、より正確に撮像領域32における被写体21の有無を判定することが可能となる。
【0083】ここで、図8を用いて本実施例による動作原理を説明する。図8(a)は、図3のステップS104で算出された変化量(各点の基準位置からの距離)を時系列に従ってグラフ化した図である。但し、縦軸の変化量は、各点の基準位置からの距離の平均値であっても積算値であっても、また、結果画像に含まれる画素値の合計値であってもよく、本発明において撮像画像の変化量を数値化した値であれば、その主旨を逸脱しない限り如何なるものを適用することが可能なものである。尚、本実施例では、縦軸の変化量を撮像パタンにおける任意の点の基準位置からの距離とした場合について説明する。
【0084】図8(a)を参照すると、本実施例において第1の所定の閾値は図中破線で示される値に設定されている。また、本実施例では、変化量が第1の所定の閾値をアップエッジでクロスした場合に、図3のステップS104において被写体21が設置されたと判定されて、撮像準備が開始される。これに対し、図8(a)中、第1の所定の閾値をクロスしない変化量、即ち、ノイズとみなせる程度の変化量に対しては、本実施例では撮像動作が開始されない。
【0085】ここで、本実施例による第1の所定の閾値について図8(b)を用いてより詳細に説明する。尚、説明の都合上、図8(b)では、撮影画像1と撮影画像2との排他的論理和により変化量を算出する場合について例を挙げる。
【0086】本実施例では、撮影画像1と撮影画像2との差分画像における対応する点間の距離を変化量(図8(a)における縦軸に対応)とし、この変化量に対して第1の所定の閾値を設定する。第1の所定の閾値の具体例としては例えば10ピクセルとし、対応する点の何れかが10ピクセル以上離れている場合にトリガがかかり、撮影準備が開始される。但し、第1の所定の閾値は、10ピクセルに限定されず、ノイズを除去でき且つ撮影領域32内に被写体21や手指31が進入されたことを検出できる程度の値に設定される。尚、これは実験結果に基づいて経験的に得られた値とすると良い。
【0087】これにより本実施例では、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0088】〔第4の実施例〕また、第4の実施例において、一定時間以上、撮像画像に変化が含まれない際に投光部10及び撮像部11を回転させて、広範囲を対象として撮像を行うよう構成した場合について説明する。即ち、第1の実施例では、撮像時に投光部10と撮像部11とが固定(但し、人為的には可動)されていたが、本実施例では、所定時間、変化が生じない場合に自動的に広範囲を検索するよう投光部10と撮像部11とが回転する。
【0089】図9は、本実施例において投光部10と撮像部11とが可動する様子を説明するための図である。図9に示すように、本実施例では投光部10と撮像部11とが移動部23により揺動することで、広範囲を検索対象としている。
【0090】本実施例による移動部23は、支持部20によって支持されている投光部10及び撮像部11を上下、左右、斜め方向に揺動し、投光軸や撮影光軸を移動させる首振り機構となっている。このように、本実施例では、撮像部11が移動することにより撮像範囲を広げることが可能である。
【0091】但し、上記のような移動部23を使用して撮像部11を移動させた場合、投光軸の傾きと撮像部11における原点から底面(被写体21の置き台)までの距離が変化する。これにより、本実施例では投光パタン22が投光される位置が図10(a)から(b)に示すように変化する。
【0092】従って本実施例では、撮像部11を移動させた量に依存して、差分処理又は排他的論理和により得られた結果画像に対する基準位置又は閾値を変化させる。
【0093】ここで、基準位置を変化させる場合では、以下に示す(式9)により、撮像画像における各点の座標を変換する。但し、(式9)は移動部23により撮像光軸をθ傾けた場合の変換式である。
【0094】
【数6】
(式9)において、θは上述のように移動部23の回転角度である。また、(x,z)は変換前の光点の座標であり、(x’,z’)は変換後の光点の座標である。更に、Lは移動部23の回転中心35から撮像部11内部における焦点までの距離である。
【0095】また、本実施例における回転中心35と撮像部11と投光部10と被写体21の置き台との関係を図11に示す。図11において、Xは移動部23が回転する以前の座標系での横方向の軸を示し、Zは同じく移動部23が回転する以前の座標系での高さ方向の軸を示す。また、X’は移動部23が回転した後の座標系での横方向の軸を示し、Z’は移動部23が回転した後の座標系での高さ方向の軸を示す。
【0096】従って、上記の(式9)は回転前の座標系での点の位置を回転後の座標系での位置に変換するための式である。この式により、本実施例では前回の撮像画像における各点を回転後の座標系へ変換して、図3におけるステップS104の処理を実行する。
【0097】次に、本実施例による画像入力装置100の動作を図12のフローチャートを用いて詳細に説明する。
【0098】図12を参照すると、本実施例においてステップS201からステップS204は、第1の実施例において図3を用いて説明した動作と同様であるため、ここでは説明を省略する。
【0099】また、本実施例では、ステップS204の判定の結果、撮像領域32内に被写体21が設置されていないと判定された場合(ステップS204のNo)、画像入力装置100は、移動部23を稼働して、投光部10と撮像部11とを回転し、投光パタン22が照射される領域及び撮像領域32を図10に示すように移動する(ステップS207)。その後、画像入力装置100は、ステップS201へ帰還し、以降の動作を実行する。
【0100】但し、本実施例において、ステップS204の判定後にステップS207を実行する条件を、予め設定しておいた所定期間、被写体21の設置が検出されなかった場合のみとすることも可能である。このように構成する場合、ステップS204とステップS207との間に、被写体21の設置が検出されない期間が所定期間継続したか否かを判定するステップを新たに設ける。
【0101】また、ステップS204の判定の結果、被写体21が検出された場合(ステップS204のYes)、画像入力装置100はステップS205以降を実行し、ステップS201へ帰還する。この際の動作の詳細は、第1の実施例で説明した図3のステップS105以降と同様であるため、ここでは説明を省略する。
【0102】また、本実施例でもステップS204の検出において第3の実施例と同様な第1の所定の閾値を設定し、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できるように構成しても良い。
【0103】このように本実施例によれば、移動部23の首振り機構により撮像部11が回転することで、被写体21の検索範囲を広範囲とした画像入力装置が実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0104】〔第5の実施例〕また、上記第1から第4の実施例では撮像画像における比較的微小な一部分だけに変化が含まれた場合でも撮像を開始するよう構成されていた。しかしながら、このように、任意の点同士の差分値又は点同士の差分値の合計値を用いて判定すると、画像ノイズによってある任意の点だけが大きく異なった場合等に誤り検出をしてしまう可能性が存在する。そこで以下の第5の実施例では、画像上でパタン光が変化する面積を算出し、その面積が広ければ撮影を開始し、面積が小さければ無視して撮影を開始させないように構成した場合を例に挙げて説明する。
【0105】これを実現するためには、第1の実施例における図3のステップS104において、図13に示すように、所定の大きさであるフィルタ(以下、領域フィルタという)36を用い、この領域フィルタ36に納まる範囲以上に変化が生じた場合のみ、撮像動作を開始するよう構成する。尚、この領域フィルタ36の大きさとしては、例えば撮影画像面積の1/9とするが、これに限定されず、ノイズ等を除去できる大きさで且つ被写体21や手指31の撮像面積以下であれば如何様にも変形して良い。
【0106】従って本実施例では、第1の実施例における図3のステップS104において、結果画像に現れたパタンの領域が領域フィルタ36の範囲内に納まるか否かを判定し、納まらない場合のみ、撮像動作を開始するよう構成される。
【0107】これにより本実施例によれば、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置が実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0108】〔第6の実施例〕また、一般的に、画像入力装置100を設置する環境によって、被写体21が撮像範囲32内に進入してくる方向や、撮像範囲32内における書き込み等がなされる場所に偏りが生じる。
【0109】これを図14を用いて説明する。図14(a)に示す例では、例えば撮像領域32における図中左下側から被写体21が進入する頻度が最も高い。従って、本実施例では、図14(b)に示すように、撮像領域32をいくつかの領域に分割し、各領域毎に上述の第1の所定の閾値のような閾値を設定するよう構成する。但し、本実施例における閾値は、図3のステップS104において求められる結果画像に基づいて被写体21が進入したか否かを判定する際の閾値であり、図14(b)に示すような各領域毎に目的に応じて異なる値が設定されるものである。
【0110】図14(b)に示す例では、撮像領域32中、被写体21が進入する確率の比較的高い下側の領域の閾値を低く設定することで、確実に被写体21が設置されたことを検知し、また、撮像領域32中、PC200側の領域の閾値を高く設定することで、マウス等の対象でない物体により撮像が開始されることを防止する。尚、閾値:高は、例えば30ピクセルとするが、マウス等の対象でない物体が検出されるのを防止し且つ被写体21や手指31を検出できる程度の範囲で設定されればよい。また、閾値:低は、例えば10ピクセルとするが、ノイズによる誤り検出を防止し且つ被写体21や手指31を感度良く検出できる範囲で設定されればよい。更に、閾値:中は、例えば20ピクセルとするが、閾値:高と閾値:低との間の範囲で設定されればよい。
【0111】このように本実施例では、対象外の物体が進入する可能性が高い領域に対する閾値を高く設定することで誤検出を低減させ、反対に被写体21が進入する可能性が高い領域に対する閾値を低く設定することで感度良く且つ的確に被写体21が設置されたことを検出できるように構成する。
【0112】また、図14(b)に示す例では、撮像領域32を9分割し、被写体21が入ってくる可能性の高い撮像領域32左下領域の閾値を低く設定し、被写体21以外の物体が入ってくる可能性の高い撮像領域32左上領域の閾値を高く設定している。
【0113】これにより本実施例では、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0114】〔第7の実施例〕また、第6の実施例において、被写体21が検出された場所又は進入してきた方向を記録し、これに基づいて自動的に図14(b)に示す分割された領域毎の閾値を設定するように構成することも可能である。このように構成した場合を第7の実施例として以下に説明する。但し、以下の説明では、被写体21が検出された場所が例えば図15に示すような分布となる場合を例に挙げて説明する。また、撮像領域32は第6の実施例で例示したように分割されているものとする。
【0115】図15(a)は検出回数が比較的少ない場合の分布を示している。また、図15(b)は検出回数が比較的多い場合の分布を示している。
【0116】図15(a),(b)において、検出確率が比較的高いと見なせる領域は、領域C1,C2である。従って、本実施例では、領域C1,C2に対応する撮像領域32内の分割された領域の閾値を、例えば10ピクセル等の比較的低い値に設定する。これは、図2に示すMPU9において判定し、設定するよう構成するとよい。また、検出確率が高いか否かの判定方法としては、例えば単位面積当たりの検出回数と予め設定しておいた回数とを比較することで判定するよう構成するとよい。
【0117】更に、本実施例では、被写体21が被写体21が設置されたと誤って判定した際の検出位置の分布も記録し、これに基づいて対応する領域の閾値を、例えば30ピクセル等の比較的高い値に設定するように構成するとよい。これは、上記と同様な方法で実現することが可能である。
【0118】以上のように検出された頻度によって閾値を変化させることで、図15に示す例では、領域A1,A2の閾値が30ピクセルと設定され、領域C1,C2の閾値が10ピクセルと設定される。また、初期状態(変化させる前)で撮像領域32全体の閾値を例えば20ピクセルとした場合、領域B1,B2の閾値はこの値から変化されず、20ピクセルである。
【0119】このように本実施例では、より多く検出させることで誤り検出される可能性が少なくなる画像入力装置100が実現される。
【0120】これにより本実施例では、投光パタン22の変化量に所定の閾値が設定されるため、外部からの振動や撮影時のノイズに影響されて被写体21を誤検出することが防止できる画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0121】〔第8の実施例〕また、第1の実施例では、図3のステップS104において被写体21の設置が判定されたことをトリガとして、即ち、撮像画像における撮像パタンに基準位置からの変化が含まれたことをトリガとして、これから所定時間経過後に撮像動作を開始するよう構成していたが、本実施例では、撮像画像における撮像パタンに基準位置からの変化が含まれた後、再度、撮像画像における撮像パタンが上記基準位置(前々回の撮像画像における各光点の位置)に戻ったことをトリガとして、撮像動作を開始するように構成した場合を例に挙げて説明する。
【0122】図16は、本実施例における画像入力装置100の動作を示すフローチャートである。
【0123】図16を参照すると、本実施例においてステップS301からステップS304は、第1の実施例において図3を用いて説明した動作と同様であるため、ここでは説明を省略する。但し、本実施例では、第1の実施例における第1の所定の閾値に代わりに第2の所定の閾値が用いられている。ここで第2の所定の閾値とは、ユーザが被写体21を撮像位置に設置するときに生じるパタンの変化を判定するためのものである。このため、第1の所定の閾値と同様に、第2の所定の閾値はノイズを除去でき且つ撮影領域32内に被写体21や手指31が進入されたことを検出できる程度の値、例えば20ピクセルに設定される。
【0124】本実施例では、ステップS304の判定の結果、撮像領域32内に被写体21が設置されたと判定された場合(ステップS304のYes)、画像入力装置100は撮像準備を開始する(ステップS305)。準備完了後、画像入力装置100は、定期的に撮像範囲32内における被写体21を撮像し(ステップS306)、撮像領域32における投光パタン22の各光点を検出する(ステップS307)。
【0125】このように、再度、撮像した画像における撮像パタンの各光点の位置を検出した画像入力装置100は、ステップS304で基準位置とした光点とステップS307で検出した光点とをそれぞれ比較し、各光点が上記基準位置に戻っているか否かを判定する(ステップS308)。これは、第3の閾値をダウンエッジでクロスしたか否かを判定することで行われる。
【0126】この判定の結果、各光点が上記基準位置に戻ったと判定された場合(ステップS308のNo)、画像入力装置100はステップS305に帰還する。これに対し、ステップS308の判定の結果、各光点が上記基準位置に戻ったと判定された場合(ステップS308のYes)、画像入力装置100は撮像準備を開始し、準備完了後、所定の時間が経過した後に撮像範囲32内における被写体21を撮像する(ステップS309)。
【0127】その後、画像入力装置100は、ステップS309で取得した画像信号に対してCDS4,A/D変換器5,IPP7により所定の処理を施し、画像データとしてメモリ8に保存する(ステップS310)。但し、ステップS310では、画像データをメモリ8に保存するのでなく、I/F部24を介して接続されたPC等の外部機器へ送信するよう構成してもよい。
【0128】このように本実施例では、投光パタン22が再び基準位置に戻るまで撮影動作を開始するのを待ち、基準位置に戻ったことをトリガとして撮影を開始する。
【0129】また、図16のステップS308の判定において、図17に示すような第3の所定の閾値を設定し、この第3の所定の閾値を変化量がダウンエッジでクロスした場合に、各光点が上記基準位置に戻ったと判定されるよう構成するとよい。これにより、外部からの振動や画像ノイズに影響され、被写体21の設置が完了しても撮影動作が開始されないという不具合を回避することが可能となる。尚、第3の所定の閾値とは、ユーザが被写体21を撮影位置に設置し終わったかを判定するためのものである。このため、第3の所定の閾値は手指31による変化量のピーク値以下の値、例えば5ピクセルに設定される。
【0130】また、図17に示す例では、撮影動作を開始するために使用する第3の所定の閾値が撮影準備を開始するために使用する第2の所定の閾値よりも高くなるよう設定されているが、これを、撮影動作を開始するために使用する第3の所定の閾値が撮影準備を開始するために使用する第2の所定の閾値よりも高くなるように設定してもよい。
【0131】これにより本実施例では、撮像準備を開始した後に投光パタン22が基準位置に戻るまで撮像動作を待機させることにより、手指31などの不必要な物体が撮影されることを防止する画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0132】〔第9の実施例〕また、第8の実施例では、被写体21に厚さがある場合、被写体21の設置を完了しても投光パタン22が基準位置に戻らず撮影動作が開始されない可能性が存在する。このため、本実施例では、図16のステップS308の判定において、第3の所定の閾値の代わりに図18に示すような第4の所定の閾値を設定し、第2の所定の閾値に基づいて撮像準備が開始された後に、再度撮影された画像を使用して、時系列毎の投光パタン22の変化量を測定し、これに基づいて被写体21が設置し終わったか否かを判定するよう構成する。但し、この際、再度撮影された画像を使用して時系列毎の投光パタン22の変化量を測定する方法としては、図5で説明したような差分処理や排他的論理和等を利用することが可能である。また、第4の所定の閾値は、時系列毎のパタン光の差分値の変化を判定するためのものである。このため、ノイズレベル近辺の範囲、例えば5ピクセルに設定されるとよいが、これに限定されず、手指31による変化量のピーク値以下の値であればよい。
【0133】また、被写体21が設置し終わったか否かの判定においては、再度の撮像から求められた変化量が第4の所定の閾値より低い状態が一定時間以上継続したか否かに基づいて判定するよう構成するとよい。即ち、一定時間以上、撮像領域32内に何も進入されなかった場合に、本実施例では図16におけるステップS309以降の処理を実行する。
【0134】これにより本実施例では、被写体21が厚さを有する物体であっても、確実に撮影動作を開始させることが可能となる。
【0135】このように本実施例では、撮像準備を開始した後に投光パタン22の位置変化がない状態が一定時間以上継続するまで撮影開始を待機するため、厚みがある被写体21に対しても確実に撮像動作を実行し、且つ、手指31等の不必要な物体が撮影されることを防止する画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0136】〔第10の実施例〕また、上記した投光パタン22をカラーとすることも可能である。以下、本実施例において、カラーの投光パタン22を適用した場合を例に挙げて説明する。
【0137】本実施例では、図2における投光パタンフィルタ12を、図19に示すようなカラーパタンを有するカラー液晶パネルを用い、投光部10から照射された光をカラー液晶パネルを介することで、被写体21に照射される投光パタン22がカラーとなるよう構成する。ここで、投光パタンフィルタ12のカラーパタンは、図1R>1における検出方法切替スイッチにより設定された検出方法に対応して自動的に設定されるよう構成するとよい。
【0138】また、投光パタンフィルタ12のカラーパタンを変化させる方法としては、例えば投光パタンフィルタ12に印加する電圧を制御してカラー液晶パネルのR,G,B値をそれぞれ調節することにより実現することが可能である。
【0139】本実施例では、このように投光する投光パタン22のカラーパタンを変化させ、特定の色である物体33だけからの反射光を撮像するよう構成することで、特定の色がついた物体33の投光パタン22の変化量のみを検出するよう構成することが可能である。
【0140】また、特定の色がついた物体から反射される投光パタン22の変化量を検出する他の方法としては、画像処理時に被写体21から反射された投光パタン22の色を識別することより、投光パタンフィルタ12としてカラー液晶パネル等のカラーフィルタを使用せずに特定の色の被写体21だけを検出する方法を適用することも可能である。
【0141】このように本実施例では、投光する投光パタン22を所定のカラーパタンとすることで被写体21から特定の色のみを反射させる、又は投光パタン22の反射光の色だけを検出するため、所定の色の被写体21だけを検出し、被写体21の誤検出を回避することを可能にする画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0142】〔第11の実施例〕また、被写体21が撮像領域32内に設置されたか否かを判定する際に用いる撮像画像の解像度は、保存するために撮像する画像の解像度よりも低くても構わない。
【0143】従って、本実施例では、第1の実施例における図3のステップS102で撮影する際と、同図ステップS105で撮影する画像の解像度とを切り替える手段を撮像部11に設け、ステップS102での撮像における解像度を低く設定するよう動作する。
【0144】これにより、本実施例では、被写体21の設置の有無を判定する処理におけるデータ量を削減し、より迅速に動作する画像入力装置100を提供することが可能である。
【0145】但し、上記の解像度を切り替える手段は、図2におけるMPU9が撮像素子3より取得する画像信号を間引くよう動作することで実現することが可能である。
【0146】このように本実施例では、被写体21の検出時に低い解像度で撮像画像を取得することで処理データが少なくなるため、リアルタイムで被写体21を検出することができる画像入力装置を安価に作成することが可能となる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0147】〔第12の実施例〕また、上記した各実施例において、自動的に撮像を行うモード(以下、自動撮像モードという)の有効/無効を切り替える撮像モード切替スイッチ15を図1に示すように設けることで、ユーザの意図したときにのみ自動的な撮像がなされるよう構成することも可能である。
【0148】但し、本実施例では、撮像モード切替スイッチ15により設定された自動撮像モードの有効/無効の設定が図2におけるMPU9に入力され、MPU9において撮像部11及び投光部10が設定に応じた制御をなされることで実現されるものである。
【0149】このように本実施例では、撮像モード切替スイッチ15を設けるため、ユーザの意図したときにのみ自動撮像機能が実行される画像入力装置を実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0150】〔第13の実施例〕更に、上記した各実施例において、ユーザが検出方法を切り替えるための検出方法切替スイッチ16を図1に示すように設けることで、ユーザが意図する検出方法で被写体21の有無の検出がなされるよう構成することも可能である。
【0151】ここで、検出方法切替スイッチ16により選択される選択肢の例としては、上記何れかの実施例で例示したような、検出速度を向上させるために投光パタン22の各光点の位置変化量を検出に利用する方法や正確に被写体21を検出するために3次元形状の変化量を基準とする方法等を選択するための選択肢や、ユーザが被写体21を設定し終わることを検出してから撮影動作を実行する方法を設定するための選択肢や、検出する際に使用される閾値を選択するための選択肢等が挙げられる。
【0152】また、検出方法切替スイッチ16により選択された設定は、図2におけるMPU9に入力される。従って、MPU9は、入力された設定に応じて投光部10や撮像部11を制御し、ユーザの意図にあった動作を実現する。
【0153】このように本実施例では、被写体21の検出方法切替スイッチ16を設けるため、ユーザの意図した検出方法等の設定で被写体21を検出することで、被写体21設置の誤検出を低減させた画像入力装置が実現できる。また、上記した以外の構成は、第1の実施例と同様であるため、本実施例では説明を省略する。
【0154】〔他の実施例〕また、上記した各実施例は、本発明を好適に実施した形態の一例に過ぎない。即ち、本発明は、その主旨を逸脱しない限り、種々変形して実施することが可能なものである。
【0155】
【発明の効果】以上説明したように、請求項1記載の発明によれば、被写体の検出をリアルタイムに行う画像入力装置を提供することが可能となる。
【0156】即ち、時系列毎に撮影されたパタンの変化量を検出して撮影準備を開始するよう構成することで、3次元形状の計測に必要な計算処理を省いて撮像領域内に被写体が入ってくることを検出することが可能となり、被写体の検出がリアルタイムに行うことができる画像入力装置を安価に実現することができる。
【0157】更に請求項1記載の発明によれば、画像入力装置自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0158】また、請求項2記載の発明によれば、被写体の検出をリアルタイムに行う画像入力装置を安価に提供することが可能となる。
【0159】即ち、画像入力装置100自体が所定パタンを被写体へ投光し、撮像領域内のパタンの変化量を検出して撮影準備を開始することにより、外部の照明条件に影響されることなく、自動的に被写体を検出し、撮影を実行することができる画像入力装置が実現できる。
【0160】更に、請求項3記載の発明によれば、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0161】更に、請求項4記載の発明によれば、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0162】更に請求項4記載の発明によれば、撮像領域を移動させることで、被写体の検索範囲を広範囲とした画像入力装置が実現できる。
【0163】更に、請求項5記載の発明によれば、投光したパタンの変化量に所定の閾値を設定することで、外部からの振動や撮影時のノイズに影響されて被写体を誤検出することが防止できる画像入力装置が実現できる。
【0164】更に、請求項6記載の発明によれば、撮像準備を開始した後に投光したパタンが基準となる位置に戻るまで撮像動作を待機させることにより、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【0165】更に、請求項7記載の発明によれば、撮像準備を開始した後に投光したパタンの位置変化がない状態が一定時間以上継続するまで撮影開始を待機することにより、厚みがある被写体に対しても確実に撮像動作を実行し、且つ、ユーザの手等の不必要な物体が撮影されることを防止する画像入力装置が実現できる。
【図面の簡単な説明】
【図1】本発明の第1の実施例による画像入力装置100の外観を示す俯瞰図である。
【図2】画像入力装置100における撮像部11の構成を示すブロック図である。
【図3】本発明の第1の実施例による画像入力装置100の動作を示すフローチャートである。
【図4】撮像領域32に被写体21が設置される際の様子を説明するための図である。
【図5】図3のステップS104における判定処理の一例を説明するための図である。
【図6】3次元形状の変化を検出する際の動作の概略を説明するための図である。
【図7】本発明の第2の実施例における3次元形状の算出を説明するための図である。
【図8】(a)は本発明において求められる変化量を時系列に従ってグラフ化した図であり、(b)は(a)の縦軸の変化量を説明するための図である。
【図9】本発明の第4の実施例において投光部10と撮像部11とが可動する様子を説明するための図である。
【図10】本発明の第4の実施例において投光部10と撮像部11とが可動したことにより投光されるパターンが移動する様子を説明するための図である。
【図11】本発明の第4の実施例における回転中心35と撮像部11と投光部10と被写体21の置き台との関係を図11に示す。
【図12】本発明の第4の実施例における画像入力装置100の動作を示すフローチャートである。
【図13】本発明の第5の実施例における領域フィルタ36を示す図である。
【図14】本発明の第6の実施例を説明するための図である。
【図15】被写体21が検出された場所の分布を示す図である。
【図16】本発明の第8の実施例における画像入力装置100の動作を示すフローチャートである。
【図17】本発明の第8の実施例において設定される第2及び第3の所定の閾値と時系列に従った変化量とをグラフ化した図である。
【図18】本発明の第9の実施例において設定される第2及び第4の所定の閾値と時系列に従った変化量とをグラフ化した図である。
【図19】本発明の第9の実施例で使用する投光パタンフィルタ12のカラーパタンを示す図である。
【符号の説明】
1 レンズ
2 絞り機構
3 撮像素子
4 CDS
5 A/D変換器
6 TG
7 IPP
8 メモリ
9 MPU
10 投光部
11 撮像部
12 投光パターン
15 撮像モード切替スイッチ
16 検出方法切替スイッチ
17 色指定切替スイッチ
20 支持部
21 被写体
22 投光パターン
23 移動部
24 I/F部
31 移動手段
32 撮像領域
33 物体
34 原点
35 回転中心
36 領域フィルタ
200 PC
【特許請求の範囲】
【請求項1】 撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段は、所定期間毎に前記撮像領域内の前記パタンを取得し、該パタンの第1の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴とする画像入力装置。
【請求項2】 撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、前記撮像領域内の3次元形状を計測する3次元形状計測手段と、該3次元形状計測手段により計測された前記撮像領域内の3次元形状に基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段は、前記3次元形状計測手段により計測された前記撮像領域内の3次元形状の第2の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴とする画像入力装置。
【請求項3】 前記被写体検出手段は、前記第1又は第2の変化を数値化し、数値化した値が第1のしきい値よりも大きい場合、前記撮像領域内に前記被写体が設置されたと判定することを特徴とする請求項1又は2記載の画像入力装置。
【請求項4】 前記撮像領域を移動させる領域移動手段を有し、前記第1のしきい値は、前記領域移動手段により移動した前記撮像領域の位置に基づいて変化することを特徴とする請求項3記載の画像入力装置。
【請求項5】 前記被写体検出手段は、前記撮像領域における前記第1又は第2の変化が含まれる領域が所定の面積以上である場合、該撮像領域内に前記被写体が設置されたと判定することを特徴とする請求項3又は4記載の画像入力装置。
【請求項6】 前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第3の変化又は前記3次元形状計測手段により計測された3次元形状の第4の変化を数値化した値が、第2のしきい値以下となったことを検出する検出手段を有し、前記第3又は第4の変化は、前記第1又は第2の変化を判定するにあたり使用したパタン又は3次元形状に対する変化であり、前記撮像手段は、前記検出手段により前記第3又は第4の変化を数値化した値が前記第2のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴とする請求項3記載の画像入力装置。
【請求項7】 前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第5の変化又は前記3次元形状計測手段により計測された3次元形状の第6の変化を数値化した値が、第3のしきい値以下となったことを検出する検出手段を有し、前記第5又は第6の変化は、前記前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後の前記撮像領域内の変化であり、前記撮像手段は、前記検出手段により前記第5又は第6の変化を数値化した値が前記第3のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴とする請求項3記載の画像入力装置。
【請求項1】 撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段は、所定期間毎に前記撮像領域内の前記パタンを取得し、該パタンの第1の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴とする画像入力装置。
【請求項2】 撮像領域内へ所定パタンの光を照射する投光手段と、前記光により前記撮像領域内に形成されたパタンに基づいて、前記撮像領域内の3次元形状を計測する3次元形状計測手段と、該3次元形状計測手段により計測された前記撮像領域内の3次元形状に基づいて、該撮像領域内に被写体が設置されたことを検出する被写体検出手段と、該被写体検出手段により前記撮像領域内に前記被写体が設置されたことが検出された後、前記撮像領域内を撮像する撮像手段と、を有し、前記被写体検出手段は、前記3次元形状計測手段により計測された前記撮像領域内の3次元形状の第2の変化を時系列に従って判定することにより、前記撮像領域内に前記被写体が設置されたか否かを検出することを特徴とする画像入力装置。
【請求項3】 前記被写体検出手段は、前記第1又は第2の変化を数値化し、数値化した値が第1のしきい値よりも大きい場合、前記撮像領域内に前記被写体が設置されたと判定することを特徴とする請求項1又は2記載の画像入力装置。
【請求項4】 前記撮像領域を移動させる領域移動手段を有し、前記第1のしきい値は、前記領域移動手段により移動した前記撮像領域の位置に基づいて変化することを特徴とする請求項3記載の画像入力装置。
【請求項5】 前記被写体検出手段は、前記撮像領域における前記第1又は第2の変化が含まれる領域が所定の面積以上である場合、該撮像領域内に前記被写体が設置されたと判定することを特徴とする請求項3又は4記載の画像入力装置。
【請求項6】 前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第3の変化又は前記3次元形状計測手段により計測された3次元形状の第4の変化を数値化した値が、第2のしきい値以下となったことを検出する検出手段を有し、前記第3又は第4の変化は、前記第1又は第2の変化を判定するにあたり使用したパタン又は3次元形状に対する変化であり、前記撮像手段は、前記検出手段により前記第3又は第4の変化を数値化した値が前記第2のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴とする請求項3記載の画像入力装置。
【請求項7】 前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後に、前記撮像領域内におけるパタンの第5の変化又は前記3次元形状計測手段により計測された3次元形状の第6の変化を数値化した値が、第3のしきい値以下となったことを検出する検出手段を有し、前記第5又は第6の変化は、前記前記被写体検出手段により前記撮像領域内に前記被写体が設置されたと判定された後の前記撮像領域内の変化であり、前記撮像手段は、前記検出手段により前記第5又は第6の変化を数値化した値が前記第3のしきい値以下であると判定された場合、前記撮像領域内を撮像することを特徴とする請求項3記載の画像入力装置。
【図1】

【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図5】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図17】
【図18】
【図15】
【図16】
【図19】
【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図5】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図17】
【図18】
【図15】
【図16】
【図19】
【公開番号】特開2003−244531(P2003−244531A)
【公開日】平成15年8月29日(2003.8.29)
【国際特許分類】
【出願番号】特願2002−157274(P2002−157274)
【出願日】平成14年5月30日(2002.5.30)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成15年8月29日(2003.8.29)
【国際特許分類】
【出願日】平成14年5月30日(2002.5.30)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]