
画像処理システムおよび画像処理装置
【課題】画像処理システムにおいて、簡易な方法で動画像のフレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する技術を提供し、システム全体の計算コストを可及的に引き下げる。
【解決手段】JPEG2000フォーマットなど、画像データの処理中に2次元ウェーブレット変換を行う画像処理システムにおいて、処理対象のフレーム画像に対して2次元ウェーブレット変換を行う。処理後に得られる現フレームのLL成分、HL成分、LH成分、および前フレームのLL成分に基づいてLucas−Kanade法による動きベクトル検出を実行する。
【解決手段】JPEG2000フォーマットなど、画像データの処理中に2次元ウェーブレット変換を行う画像処理システムにおいて、処理対象のフレーム画像に対して2次元ウェーブレット変換を行う。処理後に得られる現フレームのLL成分、HL成分、LH成分、および前フレームのLL成分に基づいてLucas−Kanade法による動きベクトル検出を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像の動きベクトルを検出する画像処理システムおよび画像処理装置に関する。
【背景技術】
【0002】
動画像の画像処理において、注目画素が移動した方向と距離を示す動きベクトルを検出する場合がある。特に、車両搭載型の画像処理装置においては安全性や即応性が要求されるため、簡易に素早く動きベクトルを検出することが重要になる。例えば、車載カメラで周囲の状況を撮影して動きベクトルを検出することで、他の車両や人物を認識して車両制御に役立てることができる。特開2008−68675号公報(特許文献1)には、車両に搭載したカメラによって取得した画像から動きベクトルを検出し、周辺の物体の動きを認識する装置が記載されている。
【0003】
動画像の動きベクトルを検出する方法としてLucas-Kanade法やブロックマッチング法が存在する。特開平11−339021号公報(特許文献2)には、Lucas-Kanade法による動きベクトルの検出について記載されている。Lucas-Kanade法で動きベクトルを求める際には、現フレーム画像、前フレーム画像、現フレーム画像をx方向に微分した画像および現フレーム画像をy方向に微分した画像、という4枚の画像を用いる。そして注目画素の画素値特性を利用した計算を行うことで動きベクトルを検出する。このLucas-Kanade法はブロックマッチング法と比べて計算式が単純という利点があり、広く用いられている。
【0004】
ところで、車載カメラで撮影した画像の用途は動きベクトル検出だけとは限らない。例えば、画像を車内のモニターに表示して運転者や乗員が周囲の状況を確認する、あるいは画像を電子データとして記録装置に蓄積して運転記録を保存しておく等である。それらの用に供する際に、画像データを所定の符号化方法によって圧縮しておけば、データの伝送時間が短くなる、データサイズが小さくなり記憶領域を節約できるなどの利点を得ることができる。
【0005】
このような画像圧縮方法には多くの種類があり、従来はJPEGフォーマットが広く用いられてきた。これは、圧縮したい2次元画像を8×8画素のブロックに分割し、ブロックごとに離散コサイン変換を行って周波数領域に変換し、得られた係数をエントロピー符号化することによりデータ量を削減する方法である。しかしこの方法では、ブロックの境界に色の段差(ブロックノイズ)ができる問題や、急峻な色の変化の周囲でもやもやとしたノイズ(モスキートノイズ)が生じる問題があった。
【0006】
そこで新たな画像圧縮方法として、JPEG2000フォーマットが規格化されている。例えば特開2006−287487号公報(特許文献3)にはJPEG2000フォーマットにより画像データを圧縮する際の効率的な処理方法が記載されている。さらに、JPEG2000の拡張仕様であるMotion−JPEG2000を用いることにより、動画像についても高いデータ圧縮率を実現可能である。
【0007】
JPEG2000による画像圧縮においても、まず画像データをタイル(JPEGにおけるブロックに相当)に分割する。タイルのサイズは任意であり、サイズを大きくすればブロックノイズの問題を軽減することができる。続いてタイルごとに2次元ウェーブレット変換を行い、画像領域を周波数領域に変換する。この処理によって4つの成分LL,HL,LH,HHが得られる。その後、各成分をMQ符号化と呼ばれる方式によって符号化し、データを生成する。そしてディスプレイに表示する際は、受け取った符号化データを
MQ復号化により復号して各成分を再現し、得られた各成分に逆ウェーブレット変換を施すことで画像を生成する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−68675号公報
【特許文献2】特開平11−339021号公報
【特許文献3】特開2006−287487号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記のようにLucas-Kanade法は簡易な動きベクトル検出手法であるものの、処理中のステップでフレーム画像のx方向およびy方向の微分画像を求める必要がある。そのためにラプラシアンフィルタなどを用いた計算を行う必要があった。この計算量が処理全体の中で比較的大きな割合を占めるため、処理全体の実行速度の制限要因となり、かつCPU消費量を増大させていた。
【0010】
一方、JPEG2000フォーマットによる画像の符号化および復号処理は、一般に従来のJPEG方式に比べて計算量が多く、他の処理、例えばLucas-Kanade法による動きベクトル検出と同時に実行するとCPU資源の競合を招いてしまっていた。
【0011】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、簡易な方法で動画像から動きベクトルを検出する技術を提供し、システム全体の計算コストを可及的に引き下げることである。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明にかかる画像処理システムでは以下の構成を採用する。すなわち、動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムであって、前記2次元ウェーブレット変換を実行するウェーブレット変換部と、前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信し、当該各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部とを備えることを特徴とする画像処理システムである。
【0013】
本発明にかかる画像処理システムにおいてはさらに、動きベクトル検出部として、注目画素移動後のフレームのLL、HL、LH成分、および、注目画素移動前のフレームのLL成分に基づいて、Lucas-Kanade法によって動きベクトルを検出する構成を取ることができる。
【0014】
ここで、フレーム画像に2次元ウェーブレット変換を行った後のHL成分は、縦方向のエッジが立った画像であり、LH成分は横方向のエッジが立った画像である。そこで、本発明にかかる画像処理システムの動きベクトル検出部においてx方向微分画像の代わりにHL成分を、y方向微分画像の代わりにLH成分を用いることによりLucas-Kanade法を簡易に実施することができる。
【0015】
本発明にかかる画像処理システムにおいてはさらに、ウェーブレット変換後の各成分をJPEG2000フォーマットの規定に従って符号化データにする符号化部を備え、動きベクトル検出部は符号化データを受信したのち各成分を復号し、動きベクトル検出に使用する構成を取ることができる。
【0016】
このような構成を取ることにより、JPEG2000フォーマットにより画像を圧縮す
る場合、そこで用いられるデータを利用して動きベクトルを検出することができ、処理効率が向上する。例えば動画像についてMotion−JPEG2000方式を用いるのであれば同時に処理を行うことができる。
【0017】
本発明にかかる画像処理システムにおいてはさらに、前記ウェーブレット変換の結果に基づいて画像を作成する画像作成部を備えるような構成を取ることができる。
【0018】
これにより、同じ動画像について動きベクトル検出と画像表示を行う画像処理システムにおいて、ウェーブレット変換の結果を共通に用いることが可能になり、CPU資源の効率的利用につながる。
【0019】
本発明にかかる画像処理システムにおいてはさらに、動画像を撮影する撮影部を備え、前記ウェーブレット変換部、前記動きベクトル検出部および前記撮影部は車両に設置されており、前記撮影部が撮影した動画像に対して動きベクトル検出を行う構成を取ることができる。
【0020】
これにより、車載カメラが撮影した動画像について動きベクトル検出を行う車載の画像処理システムにおいて、ウェーブレット変換の結果を利用して簡易に動きベクトル検出を行うことが可能になる。
【0021】
本発明はまた、ウェーブレット変換の結果を受信して動きベクトル検出を行う画像処理装置としてとらえることもできる。つまり、動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムに用いられる画像処理装置であって、前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信する受信部と、受信した各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部とを備えることを特徴とする画像処理装置である。
【発明の効果】
【0022】
本発明にかかる画像処理システムまたは画像処理装置によれば、簡易な方法で動画像から動きベクトルを検出することが可能になる。また、システム全体の計算コストを可及的に引き下げることが可能になる。
【図面の簡単な説明】
【0023】
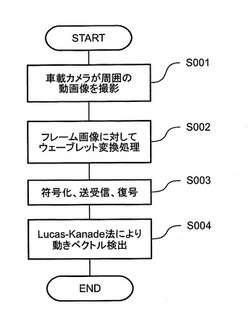
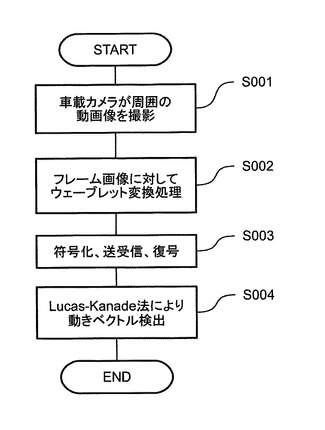
【図1】実施形態1の処理全体の流れを表すフローチャート。
【図2】画像処理システムの全体構成を表すブロック図。
【図3】動きベクトル検出の一連の処理を表すフローチャート。
【図4】受信データを利用する処理を表すフローチャート。
【図5】Lucas-Kanade法の処理対象となるフレーム画像。
【図6】2次元ウェーブレット変換の手順を説明する図。
【発明を実施するための形態】
【0024】
以下に図面を参照して、本発明の好適な実施の形態を例示的に詳しく説明する。
【0025】
<実施形態1>
本実施形態においては、本発明にかかる画像処理システムが車両に搭載され、車載カメラで撮影した画像から動きベクトルを検出する場合について説明を行う。
【0026】
最初に、図1のフローチャートを参照しつつ、本実施形態の処理の流れを説明する。なお、ここでは概略を述べるに留め、個々の処理については後ほど詳述するものとする。まず、ステップS001において、車載カメラが周囲の状況を撮影する。これにより、フレ
ームレートと撮影時間に応じたフレーム画像が得られる。次に、ステップS002において、前ステップで得られたフレーム画像に対して2次元ウェーブレット変換を施す。これにより、周波数領域に変換された各成分が得られる。次に、ステップS003において、前ステップで得られた各成分を符号化し、車載ネットワークで送受信し、動きベクトル検出部で復号する。そして、ステップS004において、前ステップで得られた各成分に基づいて、Lucas-Kanade法による動きベクトル検出を行う。
【0027】
(Lucas-Kanade法の簡単な説明)
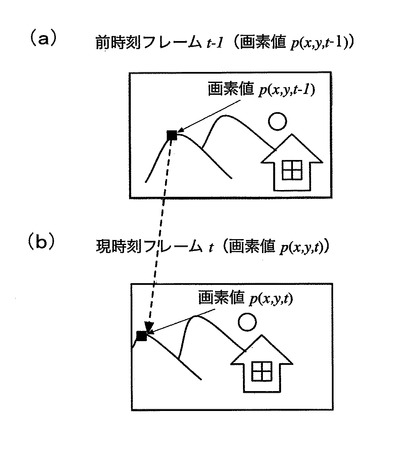
上記のようにLucas-Kanade法による動きベクトル検出は発明の実施に重要であるため、以下で簡単に説明する。ここでは図5(a)(時刻(t−1))と図5(b)(時刻t)という2つのフレームの間で、山の稜線上のある1画素pの移動に注目して動きベクトル検出を行う。両フレーム間では画素値は変化しないので、式(1)が成立する。
p(x,y,t)=const. ・・・(1)
この式1をtで偏微分すると、式(2)のようになる。
【数1】

【0028】
式(2)は、以下の式(3)のように書き換えることができる。
【数2】
【0029】
前記の式(3)を解くことにより動きベクトルvを求めることができるが、これは2変数の方程式であるため複数の画素で連立させる必要がある。そこで、式(3)を連立方程式とするために、同一の動きをする所定サイズの矩形ブロックの領域 {(x1,y1),…(xn,yn)} を考える。この領域の画素について式(3)を連立させると、以下の式(4)となる。
【数3】
となる。ここで式(4)の第1項をQ,第2項をv,第3項をrとおくと、以下の式(5)となる。
Qv=r ・・・(5)
式(5)をさらに変形すると式(6)となり、動きベクトルvを求めることができる。
v=(QTQ)−1QTr ・・・(6)
【0030】
(2次元ウェーブレット変換の簡単な説明)
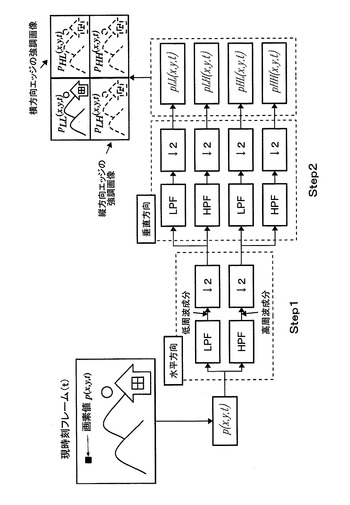
次に、本発明の実施で用いる2次元ウェーブレット変換の手順、および、得られるLL,HL,LH,HH各成分の性質について、図6を参照しつつ簡単に述べる。2次元ウェーブレット変換はローパスフィルタ(図中「LPF」)、ハイパスフィルタ(図中「HPF」)および1/2ダウンサンプラ(図中「↓2」)を使用する。LPFは、注目画素に隣接する画素の画素値を利用して画像を平滑化する効果がある。いっぽうHPFは、注目画素に隣接する画素との微分処理を行いエッジを強調する効果がある。本図は処理対象となる画像に水平方向および垂直方向の変換処理を施す手順を示している。
【0031】
まず、Step1において水平方向の処理を行う。すなわち、図の左上に示した処理前の画像に対し、まず水平方向にLPF処理とHPF処理を行う。続いて、LPFおよびHPF処理後のデータをダウンサンプラにより1/2にダウンサンプリングする。これ以降、HPF処理とダウンサンプリングを経たデータをH成分、LPF処理とダウンサンプリングを経たデータをL成分と呼ぶ。H成分およびL成分の水平方向の画素数は原画像の半分に間引かれており、垂直方向の画素数は原画像と同数である。さらにH成分を画像として見ると、垂直方向のエッジが強調された状態になっている。
【0032】
次にStep2において、H成分およびL成分に対して、今度は垂直方向にHPF処理とLPF処理を施し、ダウンサンプラにより垂直方向1/2にデータを間引く。これにより得られたデータを、以下のように呼ぶ。すなわち、L成分にLPF処理をしたものがLL成分、L成分にHPF処理をしたものがLH成分、H成分にLPF処理をしたものがHL成分、H成分にHPF処理をしたものがHH成分である。
【0033】
図の右上に示したのは、上記の処理によって画像データが成分ごとに分離された様子を模式的に表す図であり、各成分の画素をまとめて示している。ここで、HL成分は垂直(縦)方向のエッジが強調されたx方向微分画像であり、LH成分は水平(横)方向のエッジが強調されたy方向微分画像だと言える。以上のように水平方向と垂直方向にフィルタリング処理を行うことで1回の2次元ウェーブレットが完了する。
【0034】
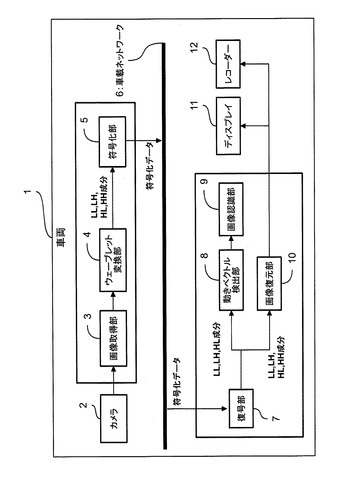
(画像処理システムの構成)
図2のブロック図を用いて、本実施形態で用いる画像処理システムの構成と各ブロックの機能を説明する。システムの各ブロックは車両1に搭載される。車両に設置された各ブロックは、ブロック間でメッセージやデータを送受信するための車載ネットワーク6に接続されている。車載ネットワークの構成はデジタルデータを伝送できるものであれば有線無線の別は問わず、例えばCANのような標準規格に依ることができる。
【0035】
カメラ2は動画像を撮影可能なデジタルビデオカメラであり、周囲の状況を撮影できる位置に設置されている。本実施形態では車両の前方に向けて固定し、対向車や障害物、通行人などを撮影、検出することを目的とする。画像取得部3は様々なソースから画像データを取得し、必要があれば画像サイズ(縦×横の画素数)を後の処理に適した形にトリミングする。本実施形態では上記のカメラが撮影した画像をソースとして用いるが、他にもフラッシュメモリなどの記録媒体を経由したり、不図示の通信装置を経由して車外から受信することができる。本実施形態のように車載カメラによる撮影画像のみが処理対象の場合は、カメラと画像取得部を一体のものとして後続処理に直接データを提供するようにしても良い。あるいは図中でまとめて示したように、画像取得部、ウェーブレット変換部、符号化部は共通のECU上で稼働するプログラムとして構成されても良い。
【0036】
ウェーブレット変換部4は、画像取得部が取得した画像に2次元ウェーブレット変換を行い、LL,LH,HL,HHの各成分を得る。符号化部5は、JPEG2000フォーマットが規定するMQ符号化による処理を行い、各成分を符号化データにする。作成した符号化データは車載ネットワーク6を経由して送出される。本実施形態における動きベクトル検出のためには、少なくともLL,LH,HLの各成分に基づく符号化データを送出する必要がある。
【0037】
復号部7は、JPEG2000フォーマットに従って圧縮された符号化データを復号し、ウェーブレット変換後の各成分を復元する。ここで、後続処理が動きベクトル検出であればLL,LH,HLの3つのみを復元すれば良い。また、後続処理で画像を利用する場合は必要に応じて復元する成分を決定でき、例えば完全に原画像を再現するのであればLL,HL,HL,HHの全てを復元すれば良い。
【0038】
動きベクトル検出部8は現フレームのLL,LH,HL成分および前フレームのLL成分に基づいてLucas-Kanade法による動きベクトル検出を行う。ここで、上述したように、HL成分は垂直方向のエッジが強調されたx方向微分画像であり、LH成分は水平方向のエッジが強調されたy方向微分画像だと言える。したがってLucas-Kanade法に必要な現フレーム画像の代わりに現フレームのLL成分を、前フレーム画像の代わりに前フレームのLL成分を、x方向微分画像の代わりにHL成分を、y方向微分画像の代わりにLH成分を用いて動きベクトルを検出できる。画像認識部9は、検出した動きベクトルを利用して画像から動体を認識する。
【0039】
画像復元部10は、JPEG2000フォーマットに従って圧縮された符号化データから、原画像を復元する。ディスプレイ11は運転者やその他の乗員に画像を表示する液晶ディスプレイである。レコーダー12は記録装置であり、画像データを蓄積することができる。なお、動きベクトル検出部、画像認識部および画像復元部は必ずしも物理的に独立している必要はなく、ECU上で稼働するプログラムとして構成されても構わない。
【0040】
(処理フロー)
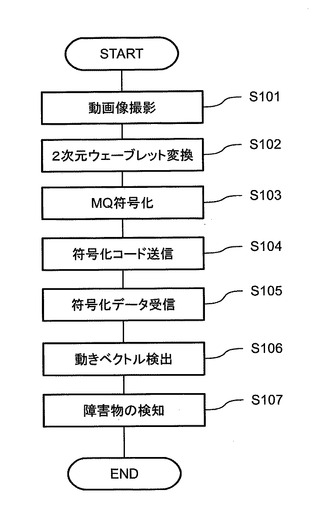
以下にフローチャートを参照しつつ、本実施形態の動きベクトル検出処理の流れを説明する。図3において、ステップS101では、車両に固定された車載カメラが前方を撮影する。ここでは例として、100×100画素の画像を取得し不図示のメモリに蓄積するものとする。各画素の画素値は0〜255の間の値を取り得る。ステップS102では、
ウェーブレット変換部がメモリから各フレーム画像を取り出し、それぞれに対して2次元ウェーブレット変換を行う。タイルのサイズはフレームと同じく100×100画素(タイル数=1)とする。その結果、LL,LH,HL,HHの各成分が生成され、それぞれの画素数は50×50となる。
【0041】
ステップS103では、符号化部が、JPEG2000フォーマットで使用するMQ符号化方式により各成分をデータ圧縮する。JPEG2000では圧縮効率を重視したものから可逆性を重視したものまで様々なスケーラビリティでの符号化が可能であるが、ここでは各成分については可逆な形式で処理を行うものとする。ステップS104では、符号化データを車載ネットワーク上に送信する。
【0042】
続いて、ステップS105では、復号部が符号化データを受信し、MQ復号化方式により復号する。なお本実施形態の動きベクトル検出方法ではLL,LH,HLの各成分のみが必要であり、HH成分は必要としない。そこで、HH成分に基づく符号化データについてはヘッダを参照して受信しないようにすれば、不要な復号処理をしないで済み、計算量を削減できる。ステップS106では、動きベクトル検出部が復号した各成分に基づいてLucas-Kanade法による動きベクトル検出を行う。ステップS107では、検出した動きベクトルに基づいて、画像認識部が車両前方の障害物、例えば車両や人物の有無を確認する。その結果として安全に関わるような障害物が発見されれば、ユーザに対して音声や画像でアラートを行ったり、緊急安全装置による回避行動を行う。
【0043】
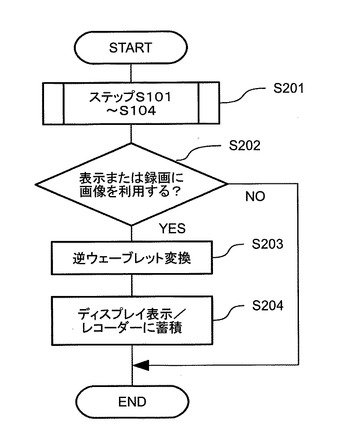
続いて図4のフローチャートを参照しつつ、ウェーブレット変換の結果を利用する処理について説明する。本フローは、符号化部が作成した符号化データを受信した状態から開始される。したがって、ステップS201は、図3のステップS101〜S105に相当する処理となっている。後続の処理で原画像を利用する場合(S202=YES)、ステップS203に進み、画像復元部が逆ウェーブレット変換を行い元の画像データを再現する。ステップS204では、ディスプレイが画像データに基づいて画像を表示したり、画像データを記録装置に蓄積する。
【0044】
(効果)
本実施形態によれば、x方向微分画像の代わりに2次元ウェーブレット変換で得られたHL成分を、y方向微分画像の代わりにLH成分を用いることによりLucas-Kanade法を簡易に実施することができる。したがって、画像を表示する必要が無く動きベクトル検出だけを行う時には、各成分に逆ウェーブレット変換を施して画像を再構成する必要がない。そのため低い計算コストで、素早く動きベクトルを検出することが可能になる。
【0045】
また、JPEG2000フォーマットにより画像データの処理を行うシステムにおいては、画像データを圧縮する過程で2次元ウェーブレット変換処理を施す必要があるので、その結果を利用することができるようになる。したがって動きベクトル検出と画像圧縮処理とで別個に行っていた計算をまとめることができるので、計算に費やしていたCPU資源を軽減するという効果が得られる。また、動きベクトル検出用の画像データとJPEG2000フォーマットで処理した画像データを別個に送受信する必要がなくなり、データ伝送量を削減するという効果が得られる。
【符号の説明】
【0046】
2 カメラ
4 ウェーブレット変換部
5 符号化部
6 車載ネットワーク
8 動きベクトル検出部
【技術分野】
【0001】
本発明は、画像の動きベクトルを検出する画像処理システムおよび画像処理装置に関する。
【背景技術】
【0002】
動画像の画像処理において、注目画素が移動した方向と距離を示す動きベクトルを検出する場合がある。特に、車両搭載型の画像処理装置においては安全性や即応性が要求されるため、簡易に素早く動きベクトルを検出することが重要になる。例えば、車載カメラで周囲の状況を撮影して動きベクトルを検出することで、他の車両や人物を認識して車両制御に役立てることができる。特開2008−68675号公報(特許文献1)には、車両に搭載したカメラによって取得した画像から動きベクトルを検出し、周辺の物体の動きを認識する装置が記載されている。
【0003】
動画像の動きベクトルを検出する方法としてLucas-Kanade法やブロックマッチング法が存在する。特開平11−339021号公報(特許文献2)には、Lucas-Kanade法による動きベクトルの検出について記載されている。Lucas-Kanade法で動きベクトルを求める際には、現フレーム画像、前フレーム画像、現フレーム画像をx方向に微分した画像および現フレーム画像をy方向に微分した画像、という4枚の画像を用いる。そして注目画素の画素値特性を利用した計算を行うことで動きベクトルを検出する。このLucas-Kanade法はブロックマッチング法と比べて計算式が単純という利点があり、広く用いられている。
【0004】
ところで、車載カメラで撮影した画像の用途は動きベクトル検出だけとは限らない。例えば、画像を車内のモニターに表示して運転者や乗員が周囲の状況を確認する、あるいは画像を電子データとして記録装置に蓄積して運転記録を保存しておく等である。それらの用に供する際に、画像データを所定の符号化方法によって圧縮しておけば、データの伝送時間が短くなる、データサイズが小さくなり記憶領域を節約できるなどの利点を得ることができる。
【0005】
このような画像圧縮方法には多くの種類があり、従来はJPEGフォーマットが広く用いられてきた。これは、圧縮したい2次元画像を8×8画素のブロックに分割し、ブロックごとに離散コサイン変換を行って周波数領域に変換し、得られた係数をエントロピー符号化することによりデータ量を削減する方法である。しかしこの方法では、ブロックの境界に色の段差(ブロックノイズ)ができる問題や、急峻な色の変化の周囲でもやもやとしたノイズ(モスキートノイズ)が生じる問題があった。
【0006】
そこで新たな画像圧縮方法として、JPEG2000フォーマットが規格化されている。例えば特開2006−287487号公報(特許文献3)にはJPEG2000フォーマットにより画像データを圧縮する際の効率的な処理方法が記載されている。さらに、JPEG2000の拡張仕様であるMotion−JPEG2000を用いることにより、動画像についても高いデータ圧縮率を実現可能である。
【0007】
JPEG2000による画像圧縮においても、まず画像データをタイル(JPEGにおけるブロックに相当)に分割する。タイルのサイズは任意であり、サイズを大きくすればブロックノイズの問題を軽減することができる。続いてタイルごとに2次元ウェーブレット変換を行い、画像領域を周波数領域に変換する。この処理によって4つの成分LL,HL,LH,HHが得られる。その後、各成分をMQ符号化と呼ばれる方式によって符号化し、データを生成する。そしてディスプレイに表示する際は、受け取った符号化データを
MQ復号化により復号して各成分を再現し、得られた各成分に逆ウェーブレット変換を施すことで画像を生成する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−68675号公報
【特許文献2】特開平11−339021号公報
【特許文献3】特開2006−287487号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記のようにLucas-Kanade法は簡易な動きベクトル検出手法であるものの、処理中のステップでフレーム画像のx方向およびy方向の微分画像を求める必要がある。そのためにラプラシアンフィルタなどを用いた計算を行う必要があった。この計算量が処理全体の中で比較的大きな割合を占めるため、処理全体の実行速度の制限要因となり、かつCPU消費量を増大させていた。
【0010】
一方、JPEG2000フォーマットによる画像の符号化および復号処理は、一般に従来のJPEG方式に比べて計算量が多く、他の処理、例えばLucas-Kanade法による動きベクトル検出と同時に実行するとCPU資源の競合を招いてしまっていた。
【0011】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、簡易な方法で動画像から動きベクトルを検出する技術を提供し、システム全体の計算コストを可及的に引き下げることである。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明にかかる画像処理システムでは以下の構成を採用する。すなわち、動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムであって、前記2次元ウェーブレット変換を実行するウェーブレット変換部と、前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信し、当該各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部とを備えることを特徴とする画像処理システムである。
【0013】
本発明にかかる画像処理システムにおいてはさらに、動きベクトル検出部として、注目画素移動後のフレームのLL、HL、LH成分、および、注目画素移動前のフレームのLL成分に基づいて、Lucas-Kanade法によって動きベクトルを検出する構成を取ることができる。
【0014】
ここで、フレーム画像に2次元ウェーブレット変換を行った後のHL成分は、縦方向のエッジが立った画像であり、LH成分は横方向のエッジが立った画像である。そこで、本発明にかかる画像処理システムの動きベクトル検出部においてx方向微分画像の代わりにHL成分を、y方向微分画像の代わりにLH成分を用いることによりLucas-Kanade法を簡易に実施することができる。
【0015】
本発明にかかる画像処理システムにおいてはさらに、ウェーブレット変換後の各成分をJPEG2000フォーマットの規定に従って符号化データにする符号化部を備え、動きベクトル検出部は符号化データを受信したのち各成分を復号し、動きベクトル検出に使用する構成を取ることができる。
【0016】
このような構成を取ることにより、JPEG2000フォーマットにより画像を圧縮す
る場合、そこで用いられるデータを利用して動きベクトルを検出することができ、処理効率が向上する。例えば動画像についてMotion−JPEG2000方式を用いるのであれば同時に処理を行うことができる。
【0017】
本発明にかかる画像処理システムにおいてはさらに、前記ウェーブレット変換の結果に基づいて画像を作成する画像作成部を備えるような構成を取ることができる。
【0018】
これにより、同じ動画像について動きベクトル検出と画像表示を行う画像処理システムにおいて、ウェーブレット変換の結果を共通に用いることが可能になり、CPU資源の効率的利用につながる。
【0019】
本発明にかかる画像処理システムにおいてはさらに、動画像を撮影する撮影部を備え、前記ウェーブレット変換部、前記動きベクトル検出部および前記撮影部は車両に設置されており、前記撮影部が撮影した動画像に対して動きベクトル検出を行う構成を取ることができる。
【0020】
これにより、車載カメラが撮影した動画像について動きベクトル検出を行う車載の画像処理システムにおいて、ウェーブレット変換の結果を利用して簡易に動きベクトル検出を行うことが可能になる。
【0021】
本発明はまた、ウェーブレット変換の結果を受信して動きベクトル検出を行う画像処理装置としてとらえることもできる。つまり、動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムに用いられる画像処理装置であって、前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信する受信部と、受信した各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部とを備えることを特徴とする画像処理装置である。
【発明の効果】
【0022】
本発明にかかる画像処理システムまたは画像処理装置によれば、簡易な方法で動画像から動きベクトルを検出することが可能になる。また、システム全体の計算コストを可及的に引き下げることが可能になる。
【図面の簡単な説明】
【0023】
【図1】実施形態1の処理全体の流れを表すフローチャート。
【図2】画像処理システムの全体構成を表すブロック図。
【図3】動きベクトル検出の一連の処理を表すフローチャート。
【図4】受信データを利用する処理を表すフローチャート。
【図5】Lucas-Kanade法の処理対象となるフレーム画像。
【図6】2次元ウェーブレット変換の手順を説明する図。
【発明を実施するための形態】
【0024】
以下に図面を参照して、本発明の好適な実施の形態を例示的に詳しく説明する。
【0025】
<実施形態1>
本実施形態においては、本発明にかかる画像処理システムが車両に搭載され、車載カメラで撮影した画像から動きベクトルを検出する場合について説明を行う。
【0026】
最初に、図1のフローチャートを参照しつつ、本実施形態の処理の流れを説明する。なお、ここでは概略を述べるに留め、個々の処理については後ほど詳述するものとする。まず、ステップS001において、車載カメラが周囲の状況を撮影する。これにより、フレ
ームレートと撮影時間に応じたフレーム画像が得られる。次に、ステップS002において、前ステップで得られたフレーム画像に対して2次元ウェーブレット変換を施す。これにより、周波数領域に変換された各成分が得られる。次に、ステップS003において、前ステップで得られた各成分を符号化し、車載ネットワークで送受信し、動きベクトル検出部で復号する。そして、ステップS004において、前ステップで得られた各成分に基づいて、Lucas-Kanade法による動きベクトル検出を行う。
【0027】
(Lucas-Kanade法の簡単な説明)
上記のようにLucas-Kanade法による動きベクトル検出は発明の実施に重要であるため、以下で簡単に説明する。ここでは図5(a)(時刻(t−1))と図5(b)(時刻t)という2つのフレームの間で、山の稜線上のある1画素pの移動に注目して動きベクトル検出を行う。両フレーム間では画素値は変化しないので、式(1)が成立する。
p(x,y,t)=const. ・・・(1)
この式1をtで偏微分すると、式(2)のようになる。
【数1】
【0028】
式(2)は、以下の式(3)のように書き換えることができる。
【数2】
【0029】
前記の式(3)を解くことにより動きベクトルvを求めることができるが、これは2変数の方程式であるため複数の画素で連立させる必要がある。そこで、式(3)を連立方程式とするために、同一の動きをする所定サイズの矩形ブロックの領域 {(x1,y1),…(xn,yn)} を考える。この領域の画素について式(3)を連立させると、以下の式(4)となる。
【数3】
となる。ここで式(4)の第1項をQ,第2項をv,第3項をrとおくと、以下の式(5)となる。
Qv=r ・・・(5)
式(5)をさらに変形すると式(6)となり、動きベクトルvを求めることができる。
v=(QTQ)−1QTr ・・・(6)
【0030】
(2次元ウェーブレット変換の簡単な説明)
次に、本発明の実施で用いる2次元ウェーブレット変換の手順、および、得られるLL,HL,LH,HH各成分の性質について、図6を参照しつつ簡単に述べる。2次元ウェーブレット変換はローパスフィルタ(図中「LPF」)、ハイパスフィルタ(図中「HPF」)および1/2ダウンサンプラ(図中「↓2」)を使用する。LPFは、注目画素に隣接する画素の画素値を利用して画像を平滑化する効果がある。いっぽうHPFは、注目画素に隣接する画素との微分処理を行いエッジを強調する効果がある。本図は処理対象となる画像に水平方向および垂直方向の変換処理を施す手順を示している。
【0031】
まず、Step1において水平方向の処理を行う。すなわち、図の左上に示した処理前の画像に対し、まず水平方向にLPF処理とHPF処理を行う。続いて、LPFおよびHPF処理後のデータをダウンサンプラにより1/2にダウンサンプリングする。これ以降、HPF処理とダウンサンプリングを経たデータをH成分、LPF処理とダウンサンプリングを経たデータをL成分と呼ぶ。H成分およびL成分の水平方向の画素数は原画像の半分に間引かれており、垂直方向の画素数は原画像と同数である。さらにH成分を画像として見ると、垂直方向のエッジが強調された状態になっている。
【0032】
次にStep2において、H成分およびL成分に対して、今度は垂直方向にHPF処理とLPF処理を施し、ダウンサンプラにより垂直方向1/2にデータを間引く。これにより得られたデータを、以下のように呼ぶ。すなわち、L成分にLPF処理をしたものがLL成分、L成分にHPF処理をしたものがLH成分、H成分にLPF処理をしたものがHL成分、H成分にHPF処理をしたものがHH成分である。
【0033】
図の右上に示したのは、上記の処理によって画像データが成分ごとに分離された様子を模式的に表す図であり、各成分の画素をまとめて示している。ここで、HL成分は垂直(縦)方向のエッジが強調されたx方向微分画像であり、LH成分は水平(横)方向のエッジが強調されたy方向微分画像だと言える。以上のように水平方向と垂直方向にフィルタリング処理を行うことで1回の2次元ウェーブレットが完了する。
【0034】
(画像処理システムの構成)
図2のブロック図を用いて、本実施形態で用いる画像処理システムの構成と各ブロックの機能を説明する。システムの各ブロックは車両1に搭載される。車両に設置された各ブロックは、ブロック間でメッセージやデータを送受信するための車載ネットワーク6に接続されている。車載ネットワークの構成はデジタルデータを伝送できるものであれば有線無線の別は問わず、例えばCANのような標準規格に依ることができる。
【0035】
カメラ2は動画像を撮影可能なデジタルビデオカメラであり、周囲の状況を撮影できる位置に設置されている。本実施形態では車両の前方に向けて固定し、対向車や障害物、通行人などを撮影、検出することを目的とする。画像取得部3は様々なソースから画像データを取得し、必要があれば画像サイズ(縦×横の画素数)を後の処理に適した形にトリミングする。本実施形態では上記のカメラが撮影した画像をソースとして用いるが、他にもフラッシュメモリなどの記録媒体を経由したり、不図示の通信装置を経由して車外から受信することができる。本実施形態のように車載カメラによる撮影画像のみが処理対象の場合は、カメラと画像取得部を一体のものとして後続処理に直接データを提供するようにしても良い。あるいは図中でまとめて示したように、画像取得部、ウェーブレット変換部、符号化部は共通のECU上で稼働するプログラムとして構成されても良い。
【0036】
ウェーブレット変換部4は、画像取得部が取得した画像に2次元ウェーブレット変換を行い、LL,LH,HL,HHの各成分を得る。符号化部5は、JPEG2000フォーマットが規定するMQ符号化による処理を行い、各成分を符号化データにする。作成した符号化データは車載ネットワーク6を経由して送出される。本実施形態における動きベクトル検出のためには、少なくともLL,LH,HLの各成分に基づく符号化データを送出する必要がある。
【0037】
復号部7は、JPEG2000フォーマットに従って圧縮された符号化データを復号し、ウェーブレット変換後の各成分を復元する。ここで、後続処理が動きベクトル検出であればLL,LH,HLの3つのみを復元すれば良い。また、後続処理で画像を利用する場合は必要に応じて復元する成分を決定でき、例えば完全に原画像を再現するのであればLL,HL,HL,HHの全てを復元すれば良い。
【0038】
動きベクトル検出部8は現フレームのLL,LH,HL成分および前フレームのLL成分に基づいてLucas-Kanade法による動きベクトル検出を行う。ここで、上述したように、HL成分は垂直方向のエッジが強調されたx方向微分画像であり、LH成分は水平方向のエッジが強調されたy方向微分画像だと言える。したがってLucas-Kanade法に必要な現フレーム画像の代わりに現フレームのLL成分を、前フレーム画像の代わりに前フレームのLL成分を、x方向微分画像の代わりにHL成分を、y方向微分画像の代わりにLH成分を用いて動きベクトルを検出できる。画像認識部9は、検出した動きベクトルを利用して画像から動体を認識する。
【0039】
画像復元部10は、JPEG2000フォーマットに従って圧縮された符号化データから、原画像を復元する。ディスプレイ11は運転者やその他の乗員に画像を表示する液晶ディスプレイである。レコーダー12は記録装置であり、画像データを蓄積することができる。なお、動きベクトル検出部、画像認識部および画像復元部は必ずしも物理的に独立している必要はなく、ECU上で稼働するプログラムとして構成されても構わない。
【0040】
(処理フロー)
以下にフローチャートを参照しつつ、本実施形態の動きベクトル検出処理の流れを説明する。図3において、ステップS101では、車両に固定された車載カメラが前方を撮影する。ここでは例として、100×100画素の画像を取得し不図示のメモリに蓄積するものとする。各画素の画素値は0〜255の間の値を取り得る。ステップS102では、
ウェーブレット変換部がメモリから各フレーム画像を取り出し、それぞれに対して2次元ウェーブレット変換を行う。タイルのサイズはフレームと同じく100×100画素(タイル数=1)とする。その結果、LL,LH,HL,HHの各成分が生成され、それぞれの画素数は50×50となる。
【0041】
ステップS103では、符号化部が、JPEG2000フォーマットで使用するMQ符号化方式により各成分をデータ圧縮する。JPEG2000では圧縮効率を重視したものから可逆性を重視したものまで様々なスケーラビリティでの符号化が可能であるが、ここでは各成分については可逆な形式で処理を行うものとする。ステップS104では、符号化データを車載ネットワーク上に送信する。
【0042】
続いて、ステップS105では、復号部が符号化データを受信し、MQ復号化方式により復号する。なお本実施形態の動きベクトル検出方法ではLL,LH,HLの各成分のみが必要であり、HH成分は必要としない。そこで、HH成分に基づく符号化データについてはヘッダを参照して受信しないようにすれば、不要な復号処理をしないで済み、計算量を削減できる。ステップS106では、動きベクトル検出部が復号した各成分に基づいてLucas-Kanade法による動きベクトル検出を行う。ステップS107では、検出した動きベクトルに基づいて、画像認識部が車両前方の障害物、例えば車両や人物の有無を確認する。その結果として安全に関わるような障害物が発見されれば、ユーザに対して音声や画像でアラートを行ったり、緊急安全装置による回避行動を行う。
【0043】
続いて図4のフローチャートを参照しつつ、ウェーブレット変換の結果を利用する処理について説明する。本フローは、符号化部が作成した符号化データを受信した状態から開始される。したがって、ステップS201は、図3のステップS101〜S105に相当する処理となっている。後続の処理で原画像を利用する場合(S202=YES)、ステップS203に進み、画像復元部が逆ウェーブレット変換を行い元の画像データを再現する。ステップS204では、ディスプレイが画像データに基づいて画像を表示したり、画像データを記録装置に蓄積する。
【0044】
(効果)
本実施形態によれば、x方向微分画像の代わりに2次元ウェーブレット変換で得られたHL成分を、y方向微分画像の代わりにLH成分を用いることによりLucas-Kanade法を簡易に実施することができる。したがって、画像を表示する必要が無く動きベクトル検出だけを行う時には、各成分に逆ウェーブレット変換を施して画像を再構成する必要がない。そのため低い計算コストで、素早く動きベクトルを検出することが可能になる。
【0045】
また、JPEG2000フォーマットにより画像データの処理を行うシステムにおいては、画像データを圧縮する過程で2次元ウェーブレット変換処理を施す必要があるので、その結果を利用することができるようになる。したがって動きベクトル検出と画像圧縮処理とで別個に行っていた計算をまとめることができるので、計算に費やしていたCPU資源を軽減するという効果が得られる。また、動きベクトル検出用の画像データとJPEG2000フォーマットで処理した画像データを別個に送受信する必要がなくなり、データ伝送量を削減するという効果が得られる。
【符号の説明】
【0046】
2 カメラ
4 ウェーブレット変換部
5 符号化部
6 車載ネットワーク
8 動きベクトル検出部
【特許請求の範囲】
【請求項1】
動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムであって、
前記2次元ウェーブレット変換を実行するウェーブレット変換部と、
前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信し、当該各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部と
を備えることを特徴とする画像処理システム。
【請求項2】
前記動きベクトル検出部は、注目画素移動後のフレームのLL、HL、LH成分、および、注目画素移動前のフレームのLL成分に基づいて、Lucas−Kanade法によって動きベクトルを検出する
ことを特徴とする請求項1に記載の画像処理システム。
【請求項3】
前記ウェーブレット変換後の各成分をJPEG2000フォーマットの規定に従って符号化データにする符号化部をさらに備え、
前記動きベクトル検出部は、前記符号化データを受信し、復号して動きベクトル検出に使用する
ことを特徴とする請求項1または2に記載の画像処理システム。
【請求項4】
前記ウェーブレット変換の結果に基づいて画像を作成する画像作成部をさらに備える
ことを特徴とする請求項1〜3のいずれか1項に記載の画像処理システム。
【請求項5】
動画像を撮影する撮影部をさらに備え、
前記ウェーブレット変換部、前記動きベクトル検出部、前記符号化部および前記撮影部は車両に設置されており、
前記撮影部が撮影した動画像に対して動きベクトル検出を行う
ことを特徴とする請求項3または4に記載の画像処理システム。
【請求項6】
動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムに用いられる画像処理装置であって、
前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信する受信部と、
受信した各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部と
を備えることを特徴とする画像処理装置。
【請求項1】
動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムであって、
前記2次元ウェーブレット変換を実行するウェーブレット変換部と、
前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信し、当該各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部と
を備えることを特徴とする画像処理システム。
【請求項2】
前記動きベクトル検出部は、注目画素移動後のフレームのLL、HL、LH成分、および、注目画素移動前のフレームのLL成分に基づいて、Lucas−Kanade法によって動きベクトルを検出する
ことを特徴とする請求項1に記載の画像処理システム。
【請求項3】
前記ウェーブレット変換後の各成分をJPEG2000フォーマットの規定に従って符号化データにする符号化部をさらに備え、
前記動きベクトル検出部は、前記符号化データを受信し、復号して動きベクトル検出に使用する
ことを特徴とする請求項1または2に記載の画像処理システム。
【請求項4】
前記ウェーブレット変換の結果に基づいて画像を作成する画像作成部をさらに備える
ことを特徴とする請求項1〜3のいずれか1項に記載の画像処理システム。
【請求項5】
動画像を撮影する撮影部をさらに備え、
前記ウェーブレット変換部、前記動きベクトル検出部、前記符号化部および前記撮影部は車両に設置されており、
前記撮影部が撮影した動画像に対して動きベクトル検出を行う
ことを特徴とする請求項3または4に記載の画像処理システム。
【請求項6】
動画像のフレーム画像に2次元ウェーブレット変換を行って画像を処理する画像処理システムに用いられる画像処理装置であって、
前記ウェーブレット変換後のLL成分、HL成分およびLH成分を受信する受信部と、
受信した各成分に基づいて、フレーム間で注目画素が移動した方向と距離を示す動きベクトルを検出する動きベクトル検出部と
を備えることを特徴とする画像処理装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−187094(P2010−187094A)
【公開日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願番号】特願2009−28572(P2009−28572)
【出願日】平成21年2月10日(2009.2.10)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願日】平成21年2月10日(2009.2.10)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]