
画像処理方法、画像処理装置及び電子機器
【課題】 画像の特性に応じた最適な補間法で原画像を補間した補間画素の画素データを生成できる画像処理方法、画像処理装置及び電子機器を提供する。
【解決手段】 原画像のスケール処理後の画素データを求めるための画像処理方法は、原画像がべた画像であるか否かを判定するステップと、べた画像であると判定されたとき、第1の補間処理方法により、該補間画素の画素データを求めるステップと、べた画像ではないと判定されたとき、少なくとも第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するステップと、前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求めるステップと、前記複数の画素の画素データに基づいてエッジが検出されないとき、第2の補間処理方法により前記補間画素の画素データを求めるステップとを含む。
【解決手段】 原画像のスケール処理後の画素データを求めるための画像処理方法は、原画像がべた画像であるか否かを判定するステップと、べた画像であると判定されたとき、第1の補間処理方法により、該補間画素の画素データを求めるステップと、べた画像ではないと判定されたとき、少なくとも第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するステップと、前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求めるステップと、前記複数の画素の画素データに基づいてエッジが検出されないとき、第2の補間処理方法により前記補間画素の画素データを求めるステップとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像処理方法、画像処理装置及び電子機器に関する。
【背景技術】
【0002】
近年、携帯電話機等の携帯機器の進化が著しく、インターネット等のコンピュータネットワークへの接続が可能となり、携帯機器に搭載される表示パネルには、種々のコンテンツが表示される。一方、表示パネルの画面サイズの拡大化や高精細化により、携帯機器の表示パネルとして例えばVGA(Video Graphics Array)サイズが採用されるようになっている。そのため、上述のような種々のコンテンツを表示パネルに表示させるため、近年の携帯機器には、画像のスケーラ機能を実現することが求められる。このスケーラ機能では、スケール処理後の画像の画質の低下をできるだけ抑え、且つ見やすい画像を生成する必要がある。
【0003】
そこで、例えば特許文献1には、原画像を拡大する際に得られる補間点がエッジ部にあるか否かを検出し、その検出結果に応じてレプリケーション補間方法やスプライン補間方法を切り替えて、補間点の画像データを求めるようにした技術が開示されている。また例えば特許文献2には、原画像が文字か自然画かを判別し、その判別結果に応じてキュービックコンボリューション方式の補間回路の係数を切り替えるようにした技術が開示されている。
【特許文献1】特開平9−252401号公報
【特許文献2】特開2001−189850号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、一般的に、携帯機器が表示するコンテンツは、文字等のテキスト情報、CG(Computer Graphics)画像や自然画が混在する情報である。従って、このようなコンテンツをキュービックコンボリューション方式でのみ補間してしまうと、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという問題がある。
【0005】
また、レプリケーション補間方法やスプライン補間方法を切り替える場合であっても、エッジの検出を前後の画素のみの差分や一次微分のみで判定してしまうと、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像になる場合があるという問題がある。
【0006】
更に、いわゆるべた画像にキュービックコンボリューション方式で補間すると、該画像のエッジ付近でリンギングが発生するという問題がある。
【0007】
本発明は、以上のような技術的課題に鑑みてなされたものであり、その目的とするところは、画像の特性に応じた最適な補間法で原画像を補間した補間画素の画素データを生成できる画像処理方法、画像処理装置及び電子機器を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために本発明は、
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理方法であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するステップと、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記第1及び第2の画素の補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により、該補間画素の画素データを求めるステップと、
前記第1及び第2の画素の画素データが同一ではないと判定されたとき、少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するステップと、
前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求めるステップと、
前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求めるステップとを含む画像処理方法に関係する。
【0009】
本発明においては、原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判別し、べた画像であるか否かを判別している。そして、ベタ画像であることが検出されたとき、又はエッジ出ることが検出されたときに、フィルタ効果を有しない第1の補間処理方法で補間画素の画素データを求め、エッジが検出されないときにはフィルタ効果を有する第2の補間処理方法で補間画素の画素データを求めるようにしている。こうすることで、べた画像、エッジ部分にある画素を補間した補間画素の画素データはフィルタ効果のない状態で画素データが求められるため、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという事態を確実に回避できるようになる。
【0010】
また本発明に係る画像処理方法では、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であってもよい。
【0011】
本発明によれば、公知の補間処理方法を採用したので、簡素な構成で画像処理方法を実現できるようになる。
【0012】
また本発明に係る画像処理方法では、
前記複数の画素の画素データに基づいてエッジが検出されないとき、前記第1の画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップと、
前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素の画素データを前記第2の補間処理方法により求めるステップと、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを前記第1の補間処理方法により求めるステップとを含むことができる。
【0013】
本発明においては、当該画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判別している。そして、斜め線を構成すると判別されたときには、第2の補間処理方法により補間画素の画素データを求め、斜め線を構成しないと判定されたときには、第1の補間処理方法により補間画素の画素データを求めるようにしている。こうすることで、テキストやCG画像等のエッジが急峻な画像を拡大又は縮小する場合において、拡大処理後又は縮小処理後の画像がぼやけたり、リンギングを発生させたりすることなく、エッジ部分が維持されたシャープな画像を得ることができる。しかも、急峻なエッジが斜め線である場合にはジャギーの発生を確実に抑えるようにしたので、滑らかさも兼ね備えた画像を得ることができるようになる。
【0014】
また本発明に係る画像処理方法では、
前記第1の補間処理方法が、
線形補間法であってもよい。
【0015】
また本発明に係る画像処理方法では、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高くてもよい。
【0016】
本発明によれば、同じフィルタ効果を有する補間処理方法であるため、第1及び第2の補間処理方法を実現する構成(例えば積和演算回路)を共用化できるようになる。
【0017】
また本発明に係る画像処理方法では、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップが、
前記第1の画素を中心画素とする所与の画素ブロック単位で、前記周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求めるステップと、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化するステップと、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップとを含むことができる。
【0018】
本発明によれば、簡素な構成で、斜め線の判別処理を実現できるようになる。
【0019】
また本発明に係る画像処理方法では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0020】
また本発明に係る画像処理方法では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0021】
上記のいずれかの発明によれば、画素ブロックの所定のパターンを解析するのみで斜め線の判別処理を実現できるので、処理及び構成を非常に簡素化できる。
【0022】
また本発明に係る画像処理方法では、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができる。
【0023】
本発明によれば、数値データの比較により斜め線の判別処理をできるようにしたので、非常に高速且つ簡素な構成で画像処理方法を実現できるようになる。
【0024】
また本発明に係る画像処理方法では、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することができる。
【0025】
本発明によれば、例えば1ドットの太さを有するテキスト情報をエッジ部分として検出できない場合を回避する。
【0026】
また本発明は、
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理装置であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するベタ画像判定部と、
少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するエッジ検出部と、
前記第1及び第2の画素の補間画素の画素データを求める補間画素データ演算部とを含み、
前記補間画素データ演算部が、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求める画像処理装置に関係する。
【0027】
また本発明に係る画像処理装置では、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であってもよい。
【0028】
また本発明に係る画像処理装置では、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定する斜め線判定部を含み、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第2の補間処理方法により求め、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第1の補間処理方法により求めることができる。
【0029】
また本発明に係る画像処理装置では、
前記第1の補間処理方法が、
線形補間法であってもよい。
【0030】
また本発明に係る画像処理装置では、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高くてもよい。
【0031】
また本発明に係る画像処理装置では、
前記斜め線判定部が、
前記第1の画素を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求める差分値演算部と、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化する2値化部とを含み、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができる。
【0032】
また本発明に係る画像処理装置では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0033】
また本発明に係る画像処理装置では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0034】
また本発明に係る画像処理装置では、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができる。
【0035】
また本発明に係る画像処理装置では、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することができる。
【0036】
上記のいずれかの発明によれば、テキスト情報やCG画像等の急峻なエッジがぼやけた画像の生成を確実に回避できる。或いは、上記のいずれかの発明によれば、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像の生成を確実に回避できるようになる。或いは、上記のいずれかの発明によれば、画像のエッジ付近でリンギングが発生するという問題を回避できるようになる。
【0037】
また本発明は、
上記のいずれか記載の画像処理装置と、
前記画像処理装置によって画像データが供給される駆動部と、
前記駆動部によって駆動される表示パネルとを含む電子機器に関係する。
【0038】
本発明によれば、画像の特性に応じた最適な補間法で原画像を補間した補間画素の画素データを生成できる画像処理装置が適用された電子機器を提供できる。
【発明を実施するための最良の形態】
【0039】
以下、本発明の実施の形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成のすべてが本発明の必須構成要件であるとは限らない。
【0040】
1. 液晶表示装置
図1に、本実施形態を携帯電話機に適用した場合の構成例を示す。
【0041】
図1において、ベースバンドエンジン(BBE)10は携帯電話機の基本機能を司る中央演算処理装置(Central Processing Unit:CPU)を搭載するLSI(Large Scale Integration)であり、インターネット経由で受信した動画や静止画、カメラで撮影した自然画、携帯電話機の操作上で必要なメニュー画面、アイコンなどの文字・図形情報等の各種画像データの出力源である。
【0042】
図1において、携帯電話機のディスプレイとして液晶表示パネル(広義には表示パネル)20が設けられている。この液晶表示パネル20は、2枚のガラス基板30、32間に液晶を封入したものである。大きなガラス基板30は例えばアクティブマトリクス基板であり、各画素にアクティブ素子であるTFT(Thin Film Transistor)が設けられている。各画素のTFTのドレイン端子に透明画素電極が、ソース端子にデータ線であるソース線が、ゲート端子に走査線であるゲート線がそれぞれ接続されている。このガラス基板30と対向するガラス基板32には透明電極が設けられている。ガラス基板32上には、ガラス基板30の短辺に沿って、液晶表示パネル20を駆動する表示ドライバ(広義には駆動部)40がCOG実装されている。表示ドライバ40は、液晶表示パネル20のゲート線に走査信号を、ソース線にデータ信号を供給して液晶表示パネル20を表示駆動する。
【0043】
ベースバンドエンジン10と表示ドライバ40との間には、画像処理コントローラ(広義には画像処理装置)50が設けられている。ベースバンドエンジン10と画像処理コントローラ50との間、画像処理コントローラ50と表示ドライバ40との間は、複数本のバスラインで接続され、画像データ、水平・垂直同期信号、クロック信号、各種コマンドが転送される。
【0044】
本実施形態では、ベースバンドエンジン10がネットワーク上のコンテンツデータを受信し、該コンテンツデータに含まれる画像データを画像処理コントローラ50に供給する。画像処理コントローラ50は、ベースバンドエンジン10からの画像データにより表される画像のサイズを拡大又は縮小して、拡大処理後又は縮小処理後の画像データを表示ドライバ40に供給する。
【0045】
2. 画像処理コントローラ
図2に、図1の画像処理コントローラ50の構成例のブロック図を示す。
【0046】
なお、本実施形態では、図2に示す構成に限定されるものではなく、図2に示す回路ブロックのうち少なくとも1つの回路ブロックが省略された構成であってもよい。
【0047】
画像処理コントローラ50は、ホストインタフェース(InterFace:I/F)52、回転処理部54、メモリ56、第1及び第2のスケーラ100、110、オーバレイ処理部58、ドライバI/F60を含む。なお、図2では、第1及び第2のスケーラ100、110を含むものとして説明するが、第1及び第2のスケーラ100、110の一方のみであってもよい。
【0048】
ホストI/F52は、ベースバンドエンジン10に接続されたバスラインを介して入出力される信号のインタフェース処理を行う。
【0049】
回転処理部54は、ベースバンドエンジン10から供給された画像の天地方向の向きを、例えば該天地方向の向きを基準に所定の回転角度だけ回転させた画像を生成する回転処理を行う。そして回転処理部54は、回転処理後の画像データをメモリ56に出力する。
【0050】
メモリ56は、フレームバッファとして機能し、例えば液晶表示パネル20の1画面分の画像データが記憶可能な容量を有する。
【0051】
第1及び第2のスケーラ100、110は、互いに同期して、又は互いに非同期で、メモリ120からの画像データを読み出す。そして、各スケーラは、メモリ56から読み出された画像データにより表される画像を原画像とし、該原画像のサイズを拡大又は縮小する処理を行って原画像のサイズの拡大処理後の画像データ又は該原画像のサイズの縮小処理後の画像データを出力する。
【0052】
オーバレイ処理部58は、第1及び第2のスケーラ100、110からの画像データに対して重ね合わせ処理を行う。なお、図2において、画像処理コントローラ50は、第2のスケーラ110及びオーバレイ処理部58が省略された構成を有していてもよい。
【0053】
ドライバI/F60は、表示ドライバ40に接続されたバスラインを介して入出力される信号のインタフェース処理を行う。例えば、ドライバI/F60は、オーバレイ処理部58により行われた重ね合わせ処理後の画像の画像データを、上記のバスラインを介して表示ドライバ40に出力する処理を行う。
【0054】
本実施形態では、原画像の画像サイズ(水平走査方向のサイズ、垂直方向のサイズ)を拡大又は縮小する際に、第1及び第2のスケーラ100、110が、原画像の画素を補間した補間画素の画素データを生成する。このとき、第1及び第2のスケーラ100、110は、原画像がテキスト情報、CG画像や自然画が混在していた場合であっても、拡大又は縮小後の画像が、ぼやけた画像やジャギーが目立つ画像とならないように、補間画素の画素データを求めることができる。更に、第1及び第2のスケーラ100、110は、原画像のべた画像(solid image)のエッジ付近において、拡大又は縮小後の画像においてリンギングの発生を回避するように補間画素の画素データを求めることができる。このような第1及び第2のスケーラ100、110は、拡大処理又は縮小処理対象の原画像の特性に応じて補間処理方法を切り替えることで、画質の劣化を抑え、且つ見やすい画像の画像データを求める。
【0055】
より具体的には、第1及び第2のスケーラ100、110は、第1及び第2の画素の補間画素の画素データを求める際に、原画像の画素データに対するフィルタ効果を有しない第1の補間処理方法と、該フィルタ効果を有する第2の補間処理方法とを切り替えながら、補間画素の画素データを求める。第1の補間処理方法では、補間画素の画素データとして、例えば原画像の第1又は第2の画素の画素データが出力される。第2の補間処理方法では、補間画素の画素データとして、少なくとも第1又は第2の画素の画素データを用いてフィルタ処理によって得られた画素データが出力される。このような第1の補間処理方法としては、例えば最近傍法(ニアレストネーバー法)がある。また、第2の補間処理方法としては、例えば双3次補間法(バイキュービック法)や線形補間法(バイリニア法)がある。双3次補間法は、フィルタ効果としてローパスフィルタとしての効果を有する。線形補間法は、フィルタ効果として三角フィルタとしての効果を有する。なお、線形補間法において、第1又は第2の画素が同一の画素データである場合には、結果として最近傍法と同じ出力結果が得られるため、上記の場合には最近傍法に代えて線形補間法を採用することができる。
【0056】
以下では、主として第1の補間処理方法として最近傍法を採用し、第2の補間処理方法として双3次補間法又は線形補間法を採用した場合を例に説明するが、本実施形態が以下で説明する補間処理方法に限定されるものではない。
【0057】
2.1 画像処理方法
図3に、本実施形態における画像処理方法の処理例のフロー図を示す。
【0058】
図3では、図2の第1のスケーラ100において、例えば1画素単位で行われる処理例を示すが、第2のスケーラ110においても同様の処理が行われる。
【0059】
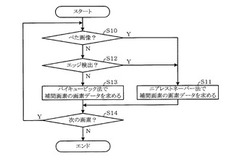
まず、第1のスケーラ100は、当該画素がべた画像であるか否かを判別する(ステップS10)。べた画像は、画像の水平走査方向(水平方向)又は垂直走査方向(垂直方向)に隣接する2つの画素の画素データが同一である画像をいう。例えば、1つの画素の画素データがRGBの各色成分のデータにより構成される場合、色成分毎に両画素のデータが同一であり、且つ水平走査方向又は垂直走査方向に隣接する2つの画素が、べた画像を構成するということができる。同様に、例えば、1つの画素の画素データがYUVの輝度成分及び色差成分のデータにより構成される場合、両画素の輝度成分のデータが同一であり、且つ色差成分毎の該両画素のデータが同一である、水平走査方向又は垂直走査方向に隣接する2つの画素が、べた画像を構成するということができる。
【0060】
図4に、べた画像の判定処理の説明図を示す。
【0061】
図4では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。このとき、第1のスケーラ100では、画素PX0の画素データ(例えばRGBの各色成分のデータ)と画素PX1の画素データ(例えばRGBの各色成分のデータ)とが同一であるか否かを判別する。
【0062】
図3に戻って説明を続ける。ステップS10において、図4に示すように画素PX0、PX1の画素データが同一であり、画素PX0がべた画像を構成すると判別されたとき(ステップS10:Y)、第1のスケーラ100は、ニアレストネーバー法(最近傍法)で補間画素PXOUTの画素データを求める(ステップS11)。
【0063】
ステップS10において、画素PX0がべた画像を構成しないと判別されたとき(ステップS10:N)、第1のスケーラ100は、画素PX0の画素データを用いてエッジ部分にあるか否かを検出する(ステップS12)。
【0064】
図5に、エッジ部分の検出処理の説明図を示す。
【0065】
図5では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。このとき、第1のスケーラ100は、例えば画素PX0、PX1の画素データのみならず、画素PX−1の画素データを用いた一次微分によりエッジ量を検出し、該エッジ量が閾値以上のときにエッジ部分にあると判別する。こうすることで、1ドットの太さを有するテキスト情報をエッジ部分として検出できない場合を回避する。
【0066】
図3において、ステップS12で、画素PX0がエッジ部分にあることが検出されたとき(ステップS12:Y)、第1のスケーラ100は、ニアレストネーバー法で補間画素PXOUTの画素データを求める(ステップS11)。
【0067】
図6(A)、図6(B)に、ニアレストネーバー法の説明図を示す。
【0068】
図6(A)では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。ここで、画素PX0、PX1の距離を正規化して「1」とした場合に、ニアレストネーバー法により求められる補間画素PXOUTの画素データは、画素PX0、PX1のうち該補間画素PXOUTからの距離が近い方の画素の画素データとなる。
【0069】
画素PX0、補間画素PXOUTの距離をt(0≦t≦1)とすると、tが1/2より大きいか小さいかを判別することで、補間画素PXOUTの画素データを求めることができる。例えば図6(B)に示すように、tが1/2以下のとき、補間画素PXOUTの画素データとして画素PX0の画素データを採用し、tが1/2より大きいとき、補間画素PXOUTの画素データとして画素PX1の画素データを採用する。
【0070】
以上のように、本実施形態によれば、べた画像、エッジ部分にある画素を補間した補間画素の画素データは、ニアレストネーバー法により求められるため、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという事態を確実に回避できる。
【0071】
図3において、ステップS12において、画素PX0がエッジ部分にないことが検出されたとき(ステップS12:N)、第1のスケーラ100は、バイキュービック法(双3次補間法)で補間画素PXOUTの画素データを求める(ステップS13)。
【0072】
ステップS11又はステップS13の後、次の画素があるとき(ステップS14:Y)、第1のスケーラ100は、ステップS10に戻って処理を継続する。また、次の画素がないとき(ステップS14:N)、第1のスケーラ100は、一連の処理を終了する(エンド)。
【0073】
図7(A)、図7(B)に、バイキュービック法の説明図を示す。
【0074】
図7(A)では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。ここで、係数k−1、k0、k1、k2と、画素PX−1、PX0、PX1、PX2の画素データとにより、図7(B)に示すように補間画素PXOUTの画素データが求められる。
【0075】
以上のように、本実施形態によれば、べた画像ではなく、且つエッジ部分にない画素の補間画素については、バイキュービック法で画素データを求めるようにしたので、3次関数補間により精度良く画素を補間できる。
【0076】
なお、図3のステップS11では、ニアレストネーバー法により補間画素PXOUTの画素データを求めるものとしたが、本実施形態はこれに限定されるものではない。例えば、図3のステップS11において、ニアレストネーバー法に代えてバイリニア法(線形補間法)により補間画素PXOUTの画素データを求めてもよい。
【0077】
図8(A)、図8(B)に、バイリニア法の説明図を示す。
【0078】
図8(A)では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。ここで、画素PX0、PX1の距離を正規化して「1」とした場合に、画素PX0、補間画素PXOUTの距離をt(0≦t≦1)とすると、バイリニア法により求められる補間画素PXOUTの画素データは、図8(B)に示すように、画素PX0、PX1の画素データを合成したデータとなる。
【0079】
べた画像やエッジ部分にない画素については、補間前の画素データが補間画素の画素データとして出力できるので、ニアレストネーバー法に代えてバイリニア法を採用した場合であっても、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという事態を確実に回避できる。
【0080】
ところで、エッジ部の検出を前後の画素のみの差分や一次微分のみで判定してしまうと、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像になる場合がある。そこで、本実施形態では、更に、当該画素の周囲画素が斜め線を構成するか否かを判別して、斜め線を構成すると判別されたときにバイキュービック法で補間画素の画素データを求める一方、斜め線を構成しないと判別されたときにニアレストネーバー法(又はバイリニア法)で補間画素の画素データを求める。こうすることで、斜め線を有するテキスト情報については、ジャギーの発生を抑えて滑らかな画像を得ることができるようになる。
【0081】
図9に、本実施形態における画像処理方法の他の処理例のフロー図を示す。
【0082】
図9において、図3と同一部分には同一符号を付し、適宜説明を省略する。図9に示す画像処理方法が図3に示す画像処理方法と異なる点は、当該画素の周囲画素が斜め線を構成するか否かを判別する処理が含まれている点である。
【0083】
即ち、図9では、第1のスケーラ100は、ステップS12において、画素PX0がエッジ部分にあることが検出されたとき(ステップS12:Y)、画素PX0の周囲画素(例えば画素PX0の水平走査方向に隣接する画素や垂直走査方向に隣接する画素)の少なくとも一部が斜め線を構成するか否かを判別する(ステップS20)。ステップS20において、画素PX0の周囲画素の少なくとも一部が、斜め線を構成すると判別されたとき(ステップS20:Y)、バイキュービック法で補間画素PXOUTの画素データを求める(ステップS13)。ステップS20において、画素PX0の周囲画素の少なくとも一部が、斜め線を構成しないと判別されたとき(ステップS20:N)、ニアレストネーバー法(又はバイリニア法)で補間画素PXOUTの画素データを求める(ステップS11)。なお、ステップS12において、画素PX0がエッジ部分にないことが検出されたとき(ステップS12:N)、第1のスケーラ100は、バイキュービック法(双3次補間法)で補間画素PXOUTの画素データを求める(ステップS13)。
【0084】
図10に、斜め線の判別処理の説明図を示す。
【0085】
図10では、原画像の画素PX0の水平走査方向に隣接する画素PX1、垂直走査方向に隣接する画素PX10、画素PX1に対し垂直走査方向に隣接する画素PX11が、テキスト情報の斜め線を構成しているものとする。このとき、図10に示すように、画素PX0の周囲画素のうち、画素PX1、PX10、PX11が斜め線を構成するため、第1のスケーラ100は、画素PX0の周囲画素の少なくとも一部が斜め線を構成するものと判別し、例えば画素PX0、PX1を補間した補間画素PXOUTの画素データをバイキュービック法により求める。
【0086】
次に、図11及び図12を用いて、本実施形態における斜め線の判別処理について説明する。
【0087】
図11に、本実施形態における斜め線の判別処理の処理例のフロー図を示す。図11に示す処理が、例えば図9のステップS20において行われる。
【0088】
図12に、図11の斜め線判定処理の説明図を示す。
【0089】
第1のスケーラ100は、画素PX0(第1の画素)を中心画素とする所与の画素ブロック単位で斜め線の判別処理を行う。以下では、画素ブロックが、画素PX0を中心画素としてその周囲の画素を含み、原画像の水平走査方向に3画素が並ぶと共に垂直走査方向に3画素が並ぶブロック(3×3ブロック)であるものとするが、2×2ブロックや7×7ブロック等の他のブロック単位でもよい。図12では、各画素(又は各画素の画素データ)をP0〜P8とすると、画素ブロックが、水平走査方向にP0、P1、P2、垂直走査方向にP0、P3、P6が並ぶものとする。この画素ブロックでは、P4が中心画素となる。
【0090】
第1のスケーラ100は、画素PX0の周囲の周囲画素の各画素の画素データと中心画素である画素PX0の画素データとの差分値を求める(ステップS30)。即ち、中心画素をCPとすると、画素ブロックを構成する各画素の差分値は、次のようになる。
【0091】
pj=Pj−CP (0≦j≦8、jは4を除く整数) ・・・(1)
次に第1のスケーラ100は、ステップS30で求めた画素ブロック内の差分値のうち、最大値と最小値を検出する(ステップS31)。なお、ステップS31において、第1のスケーラ100は、画素ブロック内の画素データの最大値と最小値とを検出するようにしてもよい。
【0092】
続いて、第1のスケーラ100は、ステップS31で検出した差分値(又は画素データ)の最大値と最小との間の閾値を生成する(ステップS32)。ステップS31で検出した最大値をMAX、最小値をMINとすると、第1のスケーラ100は、上記の閾値を、最大値と最小値との中間値((MAX+MIN)/2)として求めることができる。
【0093】
そして、第1のスケーラ100は、ステップS32で求めた閾値に基づいて、画素ブロック内の差分値を2値化する(ステップS33)。閾値以上の差分値を有する画素を「エッジ有」、閾値より小さい差分値を有する画素を「エッジ無」と判断できる。そして、第1のスケーラ100は、画素ブロック内で、閾値以上の差分値を有する画素に「1」、閾値より小さい差分値を有する画素に「0」を設定することで、ステップS33における2値化処理を実現できる。
【0094】
その後、第1のスケーラ100は、2値化処理された画素ブロックの画素のパターンを用いて、中心画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判別し(ステップS33)、一連の処理を終了する(エンド)。より具体的には、第1のスケーラ100は、2値化処理された画素ブロックの画素のパターンと予め設けられた斜め線判別用の判定パターンとにより、図12のP4を除くP0〜P8の画素データを有する画素の少なくとも一部が斜め線を構成するか否かを判別する。
【0095】
このとき、画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、周囲画素の少なくとも一部が斜め線を構成するか否かを判定することが望ましい。例えば、図12に示すように、P0の位置には「1」、P1の位置には「2」、P2の位置には「4」、`3の位置には「8」、・・・、P8の位置には「128」を重み付けし、2値化されたデータを数値化データとする。これにより、中心画素を除く周囲画素の2値化データが8ビットデータとして表すことができ、予め用意された判定パターンも同様に数値化データに変換しておけば、単純な数値比較により、周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができるようになる。
【0096】
以上のような画像処理方法は、原画像の水平走査方向と垂直走査方向のそれぞれについて行うことが望ましい。これに対して、斜め線の判別処理は、原画像の水平走査方向と垂直走査方向のいずれか1方向について行うだけでよい。
【0097】
図13(A)、図13(B)に、本実施形態における水平走査方向の斜め線判別用の判定パターンの一例を示す。
【0098】
図13(A)に示す第1の判定パターンでは、中心画素CPの水平走査方向に隣接する画素P5´に対し、垂直走査方向に隣接する両画素P3´、P8´がエッジであることを示す「0」が設定されている。従って、第1の判定パターンを8ビットデータの数値化した場合、第1の判定パターンは「8´b0XXX_X0XX」という数値データで表される(「X」は「0」でも「1」でも可)。
【0099】
図13(B)に示す第2の判定パターンでは、中心画素CPの垂直走査方向に隣接する画素P2´、P7´がエッジではないことを示す「1」が設定されている。従って、第2の判定パターンを8ビットデータの数値化した場合、第2の判定パターンは「8´bX1XX_XX1X」という数値データで表される(「X」は「0」でも「1」でも可)。
【0100】
本実施形態において水平走査方向について斜め線の判別処理を行う場合、図13(A)に示す第1の判定パターン、図13(B)に示す第2の判定パターンを用いることで、斜め線を有するテキスト情報についても、簡素な構成で、且つ精度良く画素を補間できる。
【0101】
図14に、第1及び第2の判定パターンを用いた斜め線の判別処理の一例のフロー図を示す。図14に示す処理が、図11のステップS36において行われる。
【0102】
まず、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図13(A)に示す第1の判定パターンを表す判定データ(8´b0XXX_X0XX)とを比較し、当該画素ブロックのパターンが第1の判定パターンと一致するか否かを検出する(ステップS40)。
【0103】
第1の判定パターンと一致することが検出されたとき(ステップS40:Y)、第1のスケーラ100は、例えば当該画素ブロックが、垂直走査方向に伸びる縦パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS41)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0104】
ステップS40において、当該画素ブロックのパターンが第1の判定パターンと一致しないことが検出されたとき(ステップS40:N)、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図13(B)に示す第2の判定パターンを表す判定データ(8´bX1XX_XX1X)とを比較し、当該画素ブロックのパターンが第2の判定パターンと一致するか否かを検出する(ステップS42)。
【0105】
第2の判定パターンと一致することが検出されたとき(ステップS42:Y)、第1のスケーラ100は、例えば当該画素ブロックが、中心画素上に垂直走査方向に伸びる縦パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS41)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0106】
ステップS42において、当該画素ブロックのパターンが第2の判定パターンと一致しないことが検出されたとき(ステップS42:N)、第1のスケーラ100は、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成すると判別し(ステップS43)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにバイキュービック法で補間画素の画素データを求める。
【0107】
以上のように、本実施形態では、原画像の水平走査方向の補間画素の画素データを求める際に、当該画素ブロックの中心画素CPの水平走査方向に隣接する画素P5´に垂直走査方向に隣接する両画素P3´、P8´がエッジである場合、及び該両画素がエッジではなく、且つ中心画素CPの垂直走査方向に隣接する両画素P2´、P7´がエッジではない場合を除いて、該中心画素CPの周囲画素の少なくとも一部が斜め線を構成すると判定する。
【0108】
図15(A)、図15(B)に、本実施形態における水平走査方向の斜め線の判別処理結果の一例を示す。図15(A)は、斜め線ではないと判別された画素ブロックのパターンを示し、図15(B)は、斜め線であると判別された画素ブロックのパターンを示す。
【0109】
図15(A)、図15(B)に示すように斜め線を構成するか否かを判別し、斜め線であると判別されたときにバイキュービック法で補間画素の画素データを求め、斜め線ではないと判別されたときにニアレストネーバー法で補間画素の画素データを求めることで、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像を確実に回避できるようになる。
【0110】
図16(A)、図16(B)に、本実施形態における垂直走査方向の斜め線判別用の判定パターンの一例を示す。
【0111】
図16(A)に示す第3の判定パターンでは、中心画素CPの垂直走査方向に隣接する画素P7´に対し、水平走査方向に隣接する両画素P6´、P8´がエッジであることを示す「0」が設定されている。従って、第3の判定パターンを8ビットデータの数値化した場合、第3の判定パターンは「8´b0X0X_XXXX」という数値データで表される(「X」は「0」でも「1」でも可)。
【0112】
図16(B)に示す第4の判定パターンでは、中心画素CPの水平走査方向に隣接する画素P3´、P5´がエッジではないことを示す「1」が設定されている。従って、第4の判定パターンを8ビットデータの数値化した場合、第4の判定パターンは「8´bXXX1_1XXX」という数値データで表される(「X」は「0」でも「1」でも可)。
【0113】
本実施形態において垂直走査方向について斜め線の判別処理を行う場合、図16(A)に示す第3の判定パターン、図16(B)に示す第4の判定パターンを用いることで、斜め線を有するテキスト情報についても、簡素な構成で、且つ精度良く画素を補間できる。
【0114】
図17に、第3及び第4の判定パターンを用いた斜め線の判別処理の一例のフロー図を示す。図17に示す処理が、図11のステップS36において行われる。
【0115】
まず、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図16(A)に示す第3の判定パターンを表す判定データ(8´b0X0X_XXXX)とを比較し、当該画素ブロックのパターンが第3の判定パターンと一致するか否かを検出する(ステップS50)。
【0116】
第3の判定パターンと一致することが検出されたとき(ステップS50:Y)、第1のスケーラ100は、例えば当該画素ブロックが、水平走査方向に伸びる横パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS51)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0117】
ステップS50において、当該画素ブロックのパターンが第3の判定パターンと一致しないことが検出されたとき(ステップS50:N)、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図16(B)に示す第4の判定パターンを表す判定データ(8´bXXX1_1XXX)とを比較し、当該画素ブロックのパターンが第4の判定パターンと一致するか否かを検出する(ステップS52)。
【0118】
第4の判定パターンと一致することが検出されたとき(ステップS52:Y)、第1のスケーラ100は、例えば当該画素ブロックが、中心画素上に水平走査方向に伸びる横パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS51)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0119】
ステップS52において、当該画素ブロックのパターンが第4の判定パターンと一致しないことが検出されたとき(ステップS52:N)、第1のスケーラ100は、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成すると判別し(ステップS53)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにバイキュービック法で補間画素の画素データを求める。
【0120】
以上のように、本実施形態では、原画像の垂直走査方向の補間画素の画素データを求める際に、当該画素ブロックの中心画素CPの垂直走査方向に隣接する画素P7´に水平走査方向に隣接する両画素P6´、P8´がエッジである場合、及び該両画素がエッジではなく、且つ中心画素CPの水平走査方向に隣接する両画素P3´、P5´がエッジではない場合を除いて、該中心画素CPの周囲画素の少なくとも一部が斜め線を構成すると判定する。
【0121】
図18(A)、図18(B)に、本実施形態における垂直走査方向の斜め線の判別処理結果の一例を示す。図18(A)は、斜め線ではないと判別された画素ブロックのパターンを示し、図18(B)は、斜め線であると判別された画素ブロックのパターンを示す。
【0122】
図18(A)、図18(B)に示すように斜め線を構成するか否かを判別し、斜め線であると判別されたときにバイキュービック法で補間画素の画素データを求め、斜め線ではないと判別されたときにニアレストネーバー法で補間画素の画素データを求めることで、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像を確実に回避できるようになる。
【0123】
以上、第1のスケーラ100の処理例について説明したが、第2のスケーラ110の処理についても同様である。また、上記の実施形態では、原画像の拡大処理における補間画素の画素データを求める例について説明したが、原画像の縮小処理における補間画素の画素データを求める場合も同様である。
【0124】
以上のように、本実施形態によれば、テキストやCG画像等のエッジが急峻な画像を拡大又は縮小する場合において、拡大処理後又は縮小処理後の画像がぼやけたり、リンギングを発生させたりすることなく、エッジ部分が維持されたシャープな画像を得ることができる。しかも、急峻なエッジが斜め線である場合にはジャギーの発生を確実に抑えるようにしたので、滑らかさも兼ね備えた画像を得ることができるようになる。
【0125】
2.2 第1及び第2のスケーラの構成例
次に、本実施形態における画像処理方法を実現する第1のスケーラ100の詳細な構成例について説明する。以下では、第1のスケーラ100の構成例について説明するが、第2の構成例110も第1のスケーラ100と同様の構成を有することができる。
【0126】
図19に、本実施形態における画像処理方法を実現する画像処理コントローラの第1のスケーラ100の構成例のブロック図を示す。
【0127】
第1のスケーラ100は、ラインバッファ200、補間データ演算部210、補間処理方法決定回路220、補間情報スケーラ230を含む。この第1のスケーラ100には、スケール処理(画像サイズの拡大処理間又は縮小処理)前の画素データが入力され、スケール処理後の画素データを出力する。
【0128】
ラインバッファ200は、原画像の水平走査方向の複数ラインの画素データをバッファリングする。
【0129】
補間データ演算部210は、原画像の水平走査方向又は垂直走査方向に隣接する第1及び第2の画素を補間する補間画素の画素データを求める。補間データ演算部210は、原画像の垂直走査方向に隣接する画素を補間する補間画素を求めるVスケーラ(垂直方向スケーラ)212と、原画像の水平走査方向に隣接する画素を補間する補間画素を求めるHスケーラ(水平方向スケーラ)214とを含む。Vスケーラ212が垂直走査方向に拡大又は縮小する処理を行った画素データに対して、Hスケーラ214が水平走査方向に拡大又は縮小する処理を行って、スケール処理後の画素データとして出力する。この順序でスケール処理を行うことで、水平走査方向に拡大処理された画素データを保存する必要がなくなり、順次Vスケーラ212に画素データを供給すればよいので、ラインバッファ200が有するラインバッファの数を削減できる。
【0130】
補間処理方法決定回路(補間処理方法決定部)220は、ラインバッファ200にバッファリングされた画素データに基づいて、原画像の水平走査方向又は垂直走査方向に隣接する画素の補間画素を求めるための補間処理方法を決定する。補間処理方法決定回路220は、原画像の垂直走査方向の補間処理方法を示すV方向補間情報(垂直走査方向の補間情報)と、原画像の水平走査方向の補間処理方法を示すH方向補間情報(水平走査方向の補間情報)とを出力する。V方向補間情報は、補間画素毎に、ニアレストネーバー法、バイキュービック法又はバイリニア法のいずれで補間するかを指定する情報である。H方向補間情報もまた、補間画素毎に、ニアレストネーバー法、バイキュービック法又はバイリニア法のいずれで補間するかを指定する情報である。以下では、例えば各補間情報が、補間画素毎に設けられた、ニアレストネーバー法又はバイキュービック法のいずれで補間するかを指定する1ビット情報であるものとするが、上記のようにニアレストネーバー法、バイキュービック法又はバイリニア法のいずれで補間するかを指定する場合には多値の情報であってもよい。
【0131】
補間データ演算部210は、V方向補間情報及びH方向補間情報により指定された補間処理方法で、補間画素の画素データを求める。より具体的には、Vスケーラ212は、補間処理方法決定回路220からのV方向補間情報に基づいて、ラインバッファ200にバッファリングされた画素データを垂直走査方向に拡大又は縮小する処理を行う。Hスケーラ214は、補間処理方法決定回路220からのH方向補間情報に基づいて、Vスケーラ212による処理後の画素データを水平走査方向に拡大又は縮小する処理を行う。
【0132】
また本実施形態では、Vスケーラ212による処理後の画素データに対して水平走査方向のスケール処理を行う。そのため、Vスケーラ212とHスケーラ214の構成を共通にして簡素化するために、補間処理方法決定回路220からH方向補間情報を補間情報スケーラ230で水平走査方向に拡大又は縮小する処理を行う。このとき補間情報スケーラ230は、ニアレストネーバー法(広義には第1の補間処理方法)によりH方向補間情報を拡大又は縮小する処理を行う。そして、Hスケーラ214は、補間情報スケーラ230によって拡大又は縮小された補間情報に基づいて、Vスケーラ212からの画素データを水平走査方向に拡大又は縮小する処理を行う。
【0133】
なお、補間情報スケーラ230に入力されるH方向補間情報(水平方向に補間前のH方向補間情報)は、例えば補間処理方法決定回路220にて既にリプリケーション(replication)補間されている。Vスケーラ212においてラインシフトが発生しない場合、補間処理方法決定回路220に入力される画素ブロックもまた、垂直走査方向にホールドされた画素データを有する。その際、V方向補間情報が垂直走査方向に拡大又は縮小されると同時に、H方向補間情報もまた垂直走査方向に拡大又は縮小処理される。例えば水平走査方向に画像を拡大する場合、H方向補間情報は垂直走査方向に拡大された後に水平走査方向に拡大されるようになっている。
【0134】
本実施形態によれば、補間情報スケーラ230を設け、画素データのみならず補間情報についても拡大又は縮小する処理を行って該補間情報自体を補間するようにしたので、Hスケーラ214の処理対象の画素データを保持させるバッファを用意させる必要がなくなり、Vスケーラ212及びHスケーラ214により順次画素データに対してスケール処理を行うことができるようになる。そのため、第1のスケーラ100(補間データ演算部212)の構成を大幅に簡素化できる。
【0135】
2.3 補間データ演算部
2.3.1 Vスケーラ
図20に、図19のVスケーラ212の構成例のブロック図を示す。
【0136】
図20では、Vスケーラ212が、原画像の拡大処理をするものとする。Vスケーラ212は、V方向用ルックアップテーブル(LUT)250V、補間処理制御回路260V、セレクタ262V、積和演算回路(第1の積和演算回路)264Vを含む。
【0137】
V方向用ルックアップテーブル250Vには、各係数セットが補間処理方法に対応した複数の係数群を有する複数種類の係数セットが予め登録されており、V方向補間情報により指定された補間処理方法に対応した係数セットを出力する。各係数セットは、積和演算回路264Vに供給され、積和演算回路264Vは、この係数セットと画素データとを用いて補間画素の画素データを求める。
【0138】
図20では、V方向補間情報がニアレストネーバー法又はバイキュービック法を指定する情報である。このとき、V方向用ルックアップテーブル250Vは、第1及び第2の係数セット252V、254V、セレクタ256Vを含む。第1の係数セット252Vは、第1の補間処理方法としてのニアレストネーバー法で補間画素の画素データを求めるために予め登録された係数群である。第2の係数セット254Vは、第2の補間処理方法で補間画素の画素データを求めるために予め登録された係数群である。セレクタ256Vは、V方向補間情報に基づいて第1及び第2の係数セット252V、254Vのいずれかを選択して出力する。
【0139】
補間処理制御回路260Vは、補間処理のタイミングや補間画素の位置を求める処理を行う。補間処理制御回路260Vで生成されたラインシフトイネーブルが積和演算回路264Vに供給される。補間処理制御回路260Vによって求められた補間画素の位置(座標)は、セレクタ262Vに供給される。
【0140】
セレクタ262Vは、補間処理制御回路260Vからの補間画素の座標に基づいて、V方向用ルックアップテーブル250Vからの係数セットを出力する。
【0141】
積和演算回路264Vは、ラインシフトイネーブルに同期して画素データをシフトし、セレクタ262Vからの係数セットを用いて補間画素データを求め、拡大処理後の画素データとして出力する。
【0142】
図21に、図20の積和演算回路264Vの構成例の回路図を示す。
【0143】
積和演算回路264Vは、データバッファ280V、シフトレジスタ282V、乗算器284V1〜284V4、加算器286Vを含む。データバッファ280Vには、画素データがバッファリングされる。シフトレジスタ282Vは、ラインシフトイネーブルがアクティブのときに、データバッファ280Vからの画素データを画素クロックでシフトする。乗算器284V1〜284V4は、シフトレジスタを構成するフリップフロップの出力と、係数セットk1、k2、k3、k4とを乗算する。加算器286Vは、乗算器284V1〜284V4の出力を加算する。
【0144】
例えば、係数セットとしてバイキュービック法を実現する係数セットが選択された場合、加算器286Vの出力は、図7(B)に示す式となる。
【0145】
図22に、係数に応じた積和演算回路264Vの動作説明図を示す。
【0146】
例えば、ある画素PX−1、PX0、PX1、PX2の画素データに対して第1の係数セットを与えた場合、図22のTK1のような特性が得られる。これに対して、同じ画素PX−1、PX0、PX1、PX2の画素データに対して第2の係数セットを与えた場合、図22のTK2のような特性が得られる。従って、係数セットを切り替え、補間画素の位置を参照することで、積和演算回路264Vでは、第1及び第2の補間処理方法を実現したり、フィルタ効果(フィルタ特性)を異ならせたりすることができる。
【0147】
また、第1の補間処理方法で補間画素の画素データを求める場合であっても、第1の補間処理方法に代えてバイキュービック法等の第2の補間処理方法により画素データを求めるようにしてもよい。この場合、第2の補間処理方法によるカットオフ周波数が、エッジ部が検出されないときに補間画素の画素データを求めるときの第2の補間処理方法のカットオフ周波数より高くなるような係数セットを用いる。こうすることで、回路を共用化できるようになる。
【0148】
2.3.2 Hスケーラ
図23に、図19のHスケーラ214の構成例のブロック図を示す。
【0149】
図23では、Hスケーラ214が、原画像の拡大処理をするものとする。Hスケーラ214は、H方向用ルックアップテーブル(LUT)250H、補間処理制御回路260H、セレクタ262H、積和演算回路(第2の積和演算回路)264Hを含む。
【0150】
H方向用ルックアップテーブル250Hには、各係数セットが複数の係数群を有する複数種類の係数セットが予め登録されており、補間情報スケーラ230により拡大処理されたスケール処理後のH方向補間情報により指定された補間処理方法に対応した係数セットを出力する。各係数セットは、積和演算回路264Hに供給され、積和演算回路264Hは、この係数セットと画素データとを用いて補間画素の画素データを求める。
【0151】
図23では、H方向補間情報がニアレストネーバー法又はバイキュービック法を指定する情報である。このとき、H方向用ルックアップテーブル250Hは、第3及び第4の係数セット252H、254H、セレクタ256Hを含む。第3の係数セット252Hは、第1の補間処理方法としてのニアレストネーバー法で補間画素の画素データを求めるために予め登録された係数群である。第4の係数セット254Hは、第2の補間処理方法で補間画素の画素データを求めるために予め登録された係数群である。セレクタ256Hは、スケール処理後のH方向補間情報に基づいて第3及び第4の係数セット252H、254Hのいずれかを選択して出力する。
【0152】
補間処理制御回路260Hは、補間処理のタイミングや補間画素の位置を求める処理を行う。補間処理制御回路260Hで生成された画素シフトイネーブルが積和演算回路264Hに供給される。補間処理制御回路260Hによって求められた補間画素の位置(座標)は、セレクタ262Hに供給される。
【0153】
セレクタ262Hは、補間処理制御回路260Hからの補間画素の座標に基づいて、H方向用ルックアップテーブル250Hからの係数セットを出力する。
【0154】
積和演算回路264Hは、画素シフトイネーブルに同期して画素データをシフトし、セレクタ262Hからの係数セットを用いて補間画素データを求め、拡大処理後の画素データとして出力する。
【0155】
積和演算回路264Hの構成は、図21に示す積和演算回路264Vと同様であり、詳細な説明を省略する。
【0156】
2.4 補間処理方法決定回路
図24に、図19の補間処理方法決定回路220の構成の概要を示す。
【0157】
補間処理方法決定回路220は、V方向補間処理方法決定回路300と、H方向補間処理方法決定回路350とを含む。V方向補間処理方法決定回路300は、ラインバッファ200に蓄積された画素データに基づいてV方向補間情報を生成する。H方向補間処理方法決定回路350は、ラインバッファ200に蓄積された画素データに基づいてH方向補間情報を生成する。
【0158】
2.4.1 V方向補間処理方法決定回路
図25に、図24のV方向補間処理方法決定回路300の構成例のブロック図を示す。
【0159】
V方向補間処理方法決定回路300は、べた画像判定部としての比較器310V、原画像の垂直走査方向に対する斜め線判定部320V、エッジ検出部としてのエッジ検出器340V、決定回路348Vを含む。なおV方向補間処理方法決定回路300は、図25に示すすべての回路ブロックを含む必要はなく、図25のいずれかの回路ブロックが省略されていてもよい。
【0160】
以下では、画素ブロックでは、原画像の水平走査方向に3画素P0、P1、P2、原画像の垂直走査方向に3画素P0、P3、P6が並ぶものとする。このとき、中心画素の画素データはP4となる。
【0161】
比較器310Vは、原画像の垂直走査方向に隣接する画素P4、P7(第1及び第2の画素)の画素データが同一であるか否かを判定する。斜め線判定部320Vは、中心画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定する。
【0162】
エッジ検出器340Vは、少なくとも画素P4、P7(第1及び第2の画素)を含む複数の画素の画素データに基づいてエッジを検出する。本実施形態では、エッジ検出器340Vが、画素P4、P7(第1及び第2の画素)の画素データを用いたハイパスフィルタ処理の結果の絶対値に基づいて、エッジを検出する。より具体的には、エッジ検出器340Vが、次の一次微分を用いて、外部から設定可能な閾値と比較することでエッジを検出する。
【0163】
Egv = |−P1+2×P4−P7| ・・・(2)
エッジ検出器340Vは、エッジ成分Egvが閾値THvより大きいとき、エッジを検出したと判定し、エッジ成分Egvが閾値THv以下のとき、エッジを検出しないと判定する。(2)式を用いてエッジを検出することで、例えば1ドット文字のような画像や、周波数成分の高いエッジを精度良く検出できるようになる。
【0164】
決定回路348Vは、比較器310Vの出力S、斜め線判定部320Vの出力T、エッジ検出器340Vの出力Uに基づいて、V方向補間情報である出力Xを生成する。より具体的には、決定回路348Vは、以下の論理式で出力Xを生成する。
【0165】
X=!S & !T & !U ・・・(3)
上記の式において、「&」は論理積、「!」は否定を意味し、例えば「!S」は「S」が偽のときに真であることを意味する。このようなV方向補間情報では、出力Xが真のときバイキュービック法(第2の補間処理方法)で補間するように指定し、出力Xが偽のときニアレストネーバー法(第1の補間処理方法)で補間するように指定する。
【0166】
こうして、斜め線判定部320Vの機能がディセーブルのとき、決定回路348Vは、画素P4、P7の画素データが同一であると判定されたとき、補間画素の画素データとしてニアレストネーバー法で補間画素の画素データを求めるように指定できる。また決定回路348Vは、エッジが検出されたとき、バイキュービック法により補間画素の画素データを求めるように指定できる。更に決定回路348Vは、該エッジが検出されないとき、バイキュービック法により補間画素の画素データを求めるように指定できる。
【0167】
また、斜め線判定部320Vの機能がイネーブルのとき、決定回路348Vは、エッジが検出されず、且つ画素P4の周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、補間画素の画素データをバイキュービック法により求めるように指定できる。また決定回路348Vは、該エッジが検出されず、且つ上記の周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、補間画素の画素データをニアレストネーバー法により求めるように指定できる。
【0168】
なお、図25において、斜め線判定部320Vは、差分値演算部322V、2値化回路(2値化部)324V、最小値フィルタ(以下、MINフィルタ)326V、最大値フィルタ(以下、MAXフィルタ)328V、閾値生成回路330V、パターン比較器332Vを含む。
【0169】
差分値演算部322Vは、画素P4(第1の画素)を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素(P0〜P3、P5〜P8)の各画素の画素データと中心画素の画素データとの差分値を求める。2値化回路324Vは、画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、画素ブロック内の差分値を2値化する。この閾値は、閾値生成回路330Vによって生成される。閾値生成回路330Vは、MINフィルタ326Vからの最小値、MAXフィルタ328Vからの最大値を用いて閾値を生成する。MINフィルタ326Vは、画素ブロックの画素データの最小値を求める。MAXフィルタ328Vは、画素ブロックの画素データの最大値を求める。以上のような構成により、斜め線判定部320Vは、図11、図12に示す動作を実現する。
【0170】
パターン比較器332Vには、数値化された判定パターンが入力され、2値化回路324Vで2値化されたデータと比較する。パターン比較器332Vの出力が、斜め線の判定結果となる。
【0171】
2.4.2 H方向補間処理方法決定回路
図26に、図24のH方向補間処理方法決定回路350の構成例のブロック図を示す。
【0172】
H方向補間処理方法決定回路350は、べた画像判定部としての比較器310H、原画像の水平走査方向に対する斜め線判定部320H、エッジ検出部としてのエッジ検出器340H、決定回路348Hを含む。なおH方向補間処理方法決定回路350は、図26に示すすべての回路ブロックを含む必要はなく、図26のいずれかの回路ブロックが省略されていてもよい。
【0173】
以下では、画素ブロックでは、原画像の水平走査方向に3画素P0、P1、P2、原画像の垂直走査方向に3画素P0、P3、P6が並ぶものとする。このとき、中心画素の画素データはP4となる。
【0174】
比較器310Hは、原画像の水平走査方向に隣接する画素P4、P5(第1及び第2の画素)の画素データが同一であるか否かを判定する。斜め線判定部320Hは、中心画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定する。
【0175】
エッジ検出器340Hは、少なくとも画素P4、P5(第1及び第2の画素)を含む複数の画素の画素データに基づいてエッジを検出する。本実施形態では、エッジ検出器340Hが、画素P4、P5(第1及び第2の画素)の画素データを用いたハイパスフィルタ処理の結果の絶対値に基づいて、エッジを検出する。より具体的には、エッジ検出器340Hが、次の一次微分を用いて、外部から設定可能な閾値と比較することでエッジを検出する。
【0176】
Egh = |−P3+2×P4−P5| ・・・(4)
エッジ検出器340Hは、エッジ成分Eghが閾値THhより大きいとき、エッジを検出したと判定し、エッジ成分Eghが閾値THh以下のとき、エッジを検出しないと判定する。(4)式を用いてエッジを検出することで、例えば1ドット文字のような画像や、周波数成分の高いエッジを精度良く検出できるようになる。
【0177】
決定回路348Hは、比較器310Hの出力S、斜め線判定部320Hの出力T、エッジ検出器340Hの出力Uに基づいて、H方向補間情報である出力Xを生成する。より具体的には、決定回路348Hは、以下の論理式で出力Xを生成する。
【0178】
X=!S & !T & !U ・・・(5)
上記の式において、「&」は論理積、「!」は否定を意味し、例えば「!S」は「S」が偽のときに真であることを意味する。このようなV方向補間情報では、出力Xが真のときバイキュービック法(第2の補間処理方法)で補間するように指定し、出力Xが偽のときニアレストネーバー法(第1の補間処理方法)で補間するように指定する。
【0179】
こうして、斜め線判定部320Hの機能がディセーブルのとき、決定回路348Hは、画素P4、P5の画素データが同一であると判定されたとき、補間画素の画素データとしてニアレストネーバー法で補間画素の画素データを求めるように指定できる。また決定回路348Hは、エッジが検出されたとき、バイキュービック法により補間画素の画素データを求めるように指定できる。更に決定回路348Vは、該エッジが検出されないとき、バイキュービック法により補間画素の画素データを求めるように指定できる。
【0180】
また、斜め線判定部320Hの機能がイネーブルのとき、決定回路348Hは、エッジが検出されず、且つ画素P4の周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、補間画素の画素データをバイキュービック法により求めるように指定できる。また決定回路348Hは、該エッジが検出されず、且つ上記の周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、補間画素の画素データをニアレストネーバー法により求めるように指定できる。
【0181】
なお、図26において、斜め線判定部320Hは、差分値演算部322H、2値化回路(2値化部)324H、最小値フィルタ(以下、MINフィルタ)326H、最大値フィルタ(以下、MAXフィルタ)328H、閾値生成回路330H、パターン比較器332Hを含む。
【0182】
差分値演算部322Hは、画素P4(第1の画素)を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素(P0〜P3、P5〜P8)の各画素の画素データと中心画素の画素データとの差分値を求める。2値化回路324Hは、画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、画素ブロック内の差分値を2値化する。この閾値は、閾値生成回路330Hによって生成される。閾値生成回路330Hは、MINフィルタ326Hからの最小値、MAXフィルタ328Hからの最大値を用いて閾値を生成する。MINフィルタ326Hは、画素ブロックの画素データの最小値を求める。MAXフィルタ328Hは、画素ブロックの画素データの最大値を求める。以上のような構成により、斜め線判定部320Hは、図11、図12に示す動作を実現する。
【0183】
パターン比較器332Hには、数値化された判定パターンが入力され、2値化回路324Hで2値化されたデータと比較する。パターン比較器332Hの出力が、斜め線の判定結果となる。
【0184】
2.5 補間情報スケーラ
図27に、図19の補間情報スケーラ230の構成例のブロック図を示す。
【0185】
図27では、補間情報スケーラ230が、補間方法としてダブリングにより水平走査方向に拡大するものとして説明するが、その補間方法に限定されるものではない。また、Hスケーラ214で原画像が縮小される場合には、補間情報スケーラ230が、公知の補間処理方法で、H方向補間情報を水平走査方向に縮小すればよい。
【0186】
補間情報スケーラ230は、セレクタ380、フリップフロップ390を含む。補間情報スケーラ230には、拡大前のH方向補間情報が入力され、該H方向補間情報を拡大した補間情報を出力する。
【0187】
セレクタ380は、画素シフトイネーブルがアクティブのとき拡大前のH方向補間情報を選択して出力し、画素シフトイネーブルが非アクティブ部のとき拡大後のH方向補間情報を選択して出力する。フリップフロップ390は、表示用(表示ドライバ出力用)の画素クロックに基づいて、セレクタ380の出力をラッチする。フリップフロップ390にラッチされたセレクタ380の出力が、拡大後のH方向補間情報となる。
【0188】
以上のような構成で、画素シフトイネーブルで拡大処理のタイミングを制御することで、ニアレストネーバー法でH方向補間情報の拡大処理を実現できる。本実施形態によれば、補間情報自体がフィルタリングされることなく、そのまま補間前の情報が維持され、簡素な構成で補間情報の拡大又は縮小ができる。そのため、Hスケーラ214も既存の構成を流用できる。
【0189】
3. 電子機器
図28に、本実施形態における電子機器としての携帯電話機の構成例のブロック図を示す。図28において、図1と同一部分には同一符号を付し、適宜説明を省略する。
【0190】
携帯電話機900は、カメラモジュール910を含む。カメラモジュール910は、CCDカメラを含み、CCDカメラで撮像した画像のデータを、例えばYUVフォーマットで画像処理コントローラ50(画像処理装置)に供給する。
【0191】
携帯電話機900は、液晶表示パネル20を含む。液晶表示パネル20は、表示ドライバ40(駆動部)によって駆動される。液晶表示パネル20は、複数のゲート線、複数のソース線、複数の画素を含む。
【0192】
表示ドライバ40は、ゲートドライバ42、ソースドライバ44及び電源回路46を含む。ゲートドライバ42は、液晶表示パネル20(表示パネル)の複数のゲート線を走査する。ソースドライバ44は、液晶表示パネル20の複数のソース線を、画像データに基づいて駆動する。電源回路46は、ゲートドライバ42、ソースドライバ44及び液晶表示パネル20の電圧を生成する。電源回路46は、ソースドライバ44及びゲートドライバ42に接続され、各ドライバに対して、駆動用の電源電圧を供給する。また電源回路46は、液晶表示パネル20の対向電極に、対向電極電圧Vcomを供給する。
【0193】
画像処理コントローラ50は、表示ドライバ40に接続され、ソースドライバ44に対してRGBフォーマットの画像データを供給する。
【0194】
ベースバンドエンジン10は、画像処理コントローラ50に接続される。ベースバンドエンジン10は、画像処理コントローラ50を制御する。またベースバンドエンジン10は、アンテナ960を介して受信された画像データを、変復調部950で復調した後、画像処理コントローラ50に供給できる。画像処理コントローラ50は、この画像データに基づき、ソースドライバ44及びゲートドライバ42により液晶表示パネル20に表示させる。
【0195】
ベースバンドエンジン10は、カメラモジュール910で生成された画像データを変復調部950で変調した後、アンテナ960を介して他の通信装置への送信を指示できる。
【0196】
ベースバンドエンジン10は、操作入力部970からの操作情報に基づいて画像データの送受信処理、カメラモジュール910の撮像、液晶表示パネル20の表示処理を行う。
【0197】
なお、本発明は上述した実施の形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形実施が可能である。例えば、本発明は上述の液晶表示パネルの駆動に適用されるものに限らず、エレクトロルミネッセンス、プラズマディスプレイ装置の駆動に適用可能である。
【0198】
また、本発明のうち従属請求項に係る発明においては、従属先の請求項の構成要件の一部を省略する構成とすることもできる。また、本発明の1の独立請求項に係る発明の要部を、他の独立請求項に従属させることもできる。
【図面の簡単な説明】
【0199】
【図1】本実施形態を携帯電話機に適用した場合の構成例を示す図。
【図2】図1の画像処理コントローラの構成例のブロック図。
【図3】本実施形態における画像処理方法の処理例のフロー図。
【図4】べた画像の判定処理の説明図。
【図5】エッジ部分の検出処理の説明図。
【図6】図6(A)、図6(B)はニアレストネーバー法の説明図。
【図7】図7(A)、図7(B)はバイキュービック法の説明図。
【図8】図8(A)、図8(B)はバイリニア法の説明図。
【図9】本実施形態における画像処理方法の他の処理例のフロー図。
【図10】斜め線の判別処理の説明図。
【図11】本実施形態における斜め線の判別処理の処理例のフロー図。
【図12】図11の斜め線判定処理の説明図。
【図13】図13(A)、図13(B)は本実施形態における水平走査方向の斜め線判別用の判定パターンの一例を示す図。
【図14】第1及び第2の判定パターンを用いた斜め線の判別処理の一例のフロー図。
【図15】図15(A)、図15(B)は本実施形態における水平走査方向の斜め線の判別処理結果の一例を示す図。
【図16】図16(A)、図16(B)は本実施形態における垂直走査方向の斜め線判別用の判定パターンの一例を示す図。
【図17】第3及び第4の判定パターンを用いた斜め線の判別処理の一例のフロー図。
【図18】図18(A)、図18(B)は本実施形態における垂直走査方向の斜め線の判別処理結果の一例を示す図。
【図19】本実施形態における画像処理方法を実現する画像処理コントローラの第1のスケーラの構成例のブロック図。
【図20】図19のVスケーラの構成例のブロック図を示す。
【図21】図20の積和演算回路の構成例の回路図。
【図22】係数に応じた積和演算回路の動作説明図。
【図23】図19のHスケーラの構成例のブロック図。
【図24】図19の補間処理方法決定回路の構成の概要を示す図。
【図25】図24のV方向補間処理方法決定回路の構成例のブロック図。
【図26】図24のH方向補間処理方法決定回路の構成例のブロック図。
【図27】図19の補間情報スケーラの構成例のブロック図。
【図28】本実施形態における電子機器としての携帯電話機の構成例のブロック図。
【符号の説明】
【0200】
10 ベースバンドエンジン、 20 液晶表示パネル、 30、32 ガラス基板、
40 表示ドライバ、 42 ゲートドライバ、 44 ソースドライバ、
46 電源回路、 50 画像処理コントローラ、 52 ホストI/F、
54 回転処理部、 56 メモリ、 58 オーバレイ処理部、
60 ドライバI/F、 100 第1のスケーラ、 110 第2のスケーラ、
200 ラインバッファ、 210 補間データ演算部、 212 Vスケーラ、
214 Hスケーラ、 220 補間処理方法決定回路、 230 補間情報スケーラ、
250H、250V V方向用ルックアップテーブル、 252H 第3の係数セット、
254H 第4の係数セット、 252V 第1の係数セット、
254V 第2の係数セット、
256H、262H、256V、262V、380 セレクタ、
260H、260V 補間処理制御回路、 264H、264V 積和演算回路、
280V データバッファ、 282V シフトレジスタ、
284V1〜284V4 乗算器、 286V 加算器、
300 V方向補間処理方法決定回路、 310H、310V 比較器、
320H、320V 斜め線判定部、 322H、322V 差分値演算部、
324H、324V 2値化回路、 326H、326V MINフィルタ、
328H、328V MAXフィルタ、 330H、330V 閾値生成回路、
332H、332V パターン比較器、 340H、340V エッジ検出器、
348H、348V 決定回路、 350 H方向補間処理方法決定回路、
390 フリップフロップ、 900 携帯電話機、 910 カメラモジュール、
950 変復調部、 960 アンテナ、 970 操作入力部
【技術分野】
【0001】
本発明は、画像処理方法、画像処理装置及び電子機器に関する。
【背景技術】
【0002】
近年、携帯電話機等の携帯機器の進化が著しく、インターネット等のコンピュータネットワークへの接続が可能となり、携帯機器に搭載される表示パネルには、種々のコンテンツが表示される。一方、表示パネルの画面サイズの拡大化や高精細化により、携帯機器の表示パネルとして例えばVGA(Video Graphics Array)サイズが採用されるようになっている。そのため、上述のような種々のコンテンツを表示パネルに表示させるため、近年の携帯機器には、画像のスケーラ機能を実現することが求められる。このスケーラ機能では、スケール処理後の画像の画質の低下をできるだけ抑え、且つ見やすい画像を生成する必要がある。
【0003】
そこで、例えば特許文献1には、原画像を拡大する際に得られる補間点がエッジ部にあるか否かを検出し、その検出結果に応じてレプリケーション補間方法やスプライン補間方法を切り替えて、補間点の画像データを求めるようにした技術が開示されている。また例えば特許文献2には、原画像が文字か自然画かを判別し、その判別結果に応じてキュービックコンボリューション方式の補間回路の係数を切り替えるようにした技術が開示されている。
【特許文献1】特開平9−252401号公報
【特許文献2】特開2001−189850号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、一般的に、携帯機器が表示するコンテンツは、文字等のテキスト情報、CG(Computer Graphics)画像や自然画が混在する情報である。従って、このようなコンテンツをキュービックコンボリューション方式でのみ補間してしまうと、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという問題がある。
【0005】
また、レプリケーション補間方法やスプライン補間方法を切り替える場合であっても、エッジの検出を前後の画素のみの差分や一次微分のみで判定してしまうと、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像になる場合があるという問題がある。
【0006】
更に、いわゆるべた画像にキュービックコンボリューション方式で補間すると、該画像のエッジ付近でリンギングが発生するという問題がある。
【0007】
本発明は、以上のような技術的課題に鑑みてなされたものであり、その目的とするところは、画像の特性に応じた最適な補間法で原画像を補間した補間画素の画素データを生成できる画像処理方法、画像処理装置及び電子機器を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために本発明は、
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理方法であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するステップと、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記第1及び第2の画素の補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により、該補間画素の画素データを求めるステップと、
前記第1及び第2の画素の画素データが同一ではないと判定されたとき、少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するステップと、
前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求めるステップと、
前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求めるステップとを含む画像処理方法に関係する。
【0009】
本発明においては、原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判別し、べた画像であるか否かを判別している。そして、ベタ画像であることが検出されたとき、又はエッジ出ることが検出されたときに、フィルタ効果を有しない第1の補間処理方法で補間画素の画素データを求め、エッジが検出されないときにはフィルタ効果を有する第2の補間処理方法で補間画素の画素データを求めるようにしている。こうすることで、べた画像、エッジ部分にある画素を補間した補間画素の画素データはフィルタ効果のない状態で画素データが求められるため、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという事態を確実に回避できるようになる。
【0010】
また本発明に係る画像処理方法では、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であってもよい。
【0011】
本発明によれば、公知の補間処理方法を採用したので、簡素な構成で画像処理方法を実現できるようになる。
【0012】
また本発明に係る画像処理方法では、
前記複数の画素の画素データに基づいてエッジが検出されないとき、前記第1の画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップと、
前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素の画素データを前記第2の補間処理方法により求めるステップと、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを前記第1の補間処理方法により求めるステップとを含むことができる。
【0013】
本発明においては、当該画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判別している。そして、斜め線を構成すると判別されたときには、第2の補間処理方法により補間画素の画素データを求め、斜め線を構成しないと判定されたときには、第1の補間処理方法により補間画素の画素データを求めるようにしている。こうすることで、テキストやCG画像等のエッジが急峻な画像を拡大又は縮小する場合において、拡大処理後又は縮小処理後の画像がぼやけたり、リンギングを発生させたりすることなく、エッジ部分が維持されたシャープな画像を得ることができる。しかも、急峻なエッジが斜め線である場合にはジャギーの発生を確実に抑えるようにしたので、滑らかさも兼ね備えた画像を得ることができるようになる。
【0014】
また本発明に係る画像処理方法では、
前記第1の補間処理方法が、
線形補間法であってもよい。
【0015】
また本発明に係る画像処理方法では、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高くてもよい。
【0016】
本発明によれば、同じフィルタ効果を有する補間処理方法であるため、第1及び第2の補間処理方法を実現する構成(例えば積和演算回路)を共用化できるようになる。
【0017】
また本発明に係る画像処理方法では、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップが、
前記第1の画素を中心画素とする所与の画素ブロック単位で、前記周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求めるステップと、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化するステップと、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップとを含むことができる。
【0018】
本発明によれば、簡素な構成で、斜め線の判別処理を実現できるようになる。
【0019】
また本発明に係る画像処理方法では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0020】
また本発明に係る画像処理方法では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0021】
上記のいずれかの発明によれば、画素ブロックの所定のパターンを解析するのみで斜め線の判別処理を実現できるので、処理及び構成を非常に簡素化できる。
【0022】
また本発明に係る画像処理方法では、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができる。
【0023】
本発明によれば、数値データの比較により斜め線の判別処理をできるようにしたので、非常に高速且つ簡素な構成で画像処理方法を実現できるようになる。
【0024】
また本発明に係る画像処理方法では、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することができる。
【0025】
本発明によれば、例えば1ドットの太さを有するテキスト情報をエッジ部分として検出できない場合を回避する。
【0026】
また本発明は、
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理装置であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するベタ画像判定部と、
少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するエッジ検出部と、
前記第1及び第2の画素の補間画素の画素データを求める補間画素データ演算部とを含み、
前記補間画素データ演算部が、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求める画像処理装置に関係する。
【0027】
また本発明に係る画像処理装置では、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であってもよい。
【0028】
また本発明に係る画像処理装置では、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定する斜め線判定部を含み、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第2の補間処理方法により求め、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第1の補間処理方法により求めることができる。
【0029】
また本発明に係る画像処理装置では、
前記第1の補間処理方法が、
線形補間法であってもよい。
【0030】
また本発明に係る画像処理装置では、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高くてもよい。
【0031】
また本発明に係る画像処理装置では、
前記斜め線判定部が、
前記第1の画素を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求める差分値演算部と、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化する2値化部とを含み、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができる。
【0032】
また本発明に係る画像処理装置では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0033】
また本発明に係る画像処理装置では、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することができる。
【0034】
また本発明に係る画像処理装置では、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができる。
【0035】
また本発明に係る画像処理装置では、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することができる。
【0036】
上記のいずれかの発明によれば、テキスト情報やCG画像等の急峻なエッジがぼやけた画像の生成を確実に回避できる。或いは、上記のいずれかの発明によれば、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像の生成を確実に回避できるようになる。或いは、上記のいずれかの発明によれば、画像のエッジ付近でリンギングが発生するという問題を回避できるようになる。
【0037】
また本発明は、
上記のいずれか記載の画像処理装置と、
前記画像処理装置によって画像データが供給される駆動部と、
前記駆動部によって駆動される表示パネルとを含む電子機器に関係する。
【0038】
本発明によれば、画像の特性に応じた最適な補間法で原画像を補間した補間画素の画素データを生成できる画像処理装置が適用された電子機器を提供できる。
【発明を実施するための最良の形態】
【0039】
以下、本発明の実施の形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成のすべてが本発明の必須構成要件であるとは限らない。
【0040】
1. 液晶表示装置
図1に、本実施形態を携帯電話機に適用した場合の構成例を示す。
【0041】
図1において、ベースバンドエンジン(BBE)10は携帯電話機の基本機能を司る中央演算処理装置(Central Processing Unit:CPU)を搭載するLSI(Large Scale Integration)であり、インターネット経由で受信した動画や静止画、カメラで撮影した自然画、携帯電話機の操作上で必要なメニュー画面、アイコンなどの文字・図形情報等の各種画像データの出力源である。
【0042】
図1において、携帯電話機のディスプレイとして液晶表示パネル(広義には表示パネル)20が設けられている。この液晶表示パネル20は、2枚のガラス基板30、32間に液晶を封入したものである。大きなガラス基板30は例えばアクティブマトリクス基板であり、各画素にアクティブ素子であるTFT(Thin Film Transistor)が設けられている。各画素のTFTのドレイン端子に透明画素電極が、ソース端子にデータ線であるソース線が、ゲート端子に走査線であるゲート線がそれぞれ接続されている。このガラス基板30と対向するガラス基板32には透明電極が設けられている。ガラス基板32上には、ガラス基板30の短辺に沿って、液晶表示パネル20を駆動する表示ドライバ(広義には駆動部)40がCOG実装されている。表示ドライバ40は、液晶表示パネル20のゲート線に走査信号を、ソース線にデータ信号を供給して液晶表示パネル20を表示駆動する。
【0043】
ベースバンドエンジン10と表示ドライバ40との間には、画像処理コントローラ(広義には画像処理装置)50が設けられている。ベースバンドエンジン10と画像処理コントローラ50との間、画像処理コントローラ50と表示ドライバ40との間は、複数本のバスラインで接続され、画像データ、水平・垂直同期信号、クロック信号、各種コマンドが転送される。
【0044】
本実施形態では、ベースバンドエンジン10がネットワーク上のコンテンツデータを受信し、該コンテンツデータに含まれる画像データを画像処理コントローラ50に供給する。画像処理コントローラ50は、ベースバンドエンジン10からの画像データにより表される画像のサイズを拡大又は縮小して、拡大処理後又は縮小処理後の画像データを表示ドライバ40に供給する。
【0045】
2. 画像処理コントローラ
図2に、図1の画像処理コントローラ50の構成例のブロック図を示す。
【0046】
なお、本実施形態では、図2に示す構成に限定されるものではなく、図2に示す回路ブロックのうち少なくとも1つの回路ブロックが省略された構成であってもよい。
【0047】
画像処理コントローラ50は、ホストインタフェース(InterFace:I/F)52、回転処理部54、メモリ56、第1及び第2のスケーラ100、110、オーバレイ処理部58、ドライバI/F60を含む。なお、図2では、第1及び第2のスケーラ100、110を含むものとして説明するが、第1及び第2のスケーラ100、110の一方のみであってもよい。
【0048】
ホストI/F52は、ベースバンドエンジン10に接続されたバスラインを介して入出力される信号のインタフェース処理を行う。
【0049】
回転処理部54は、ベースバンドエンジン10から供給された画像の天地方向の向きを、例えば該天地方向の向きを基準に所定の回転角度だけ回転させた画像を生成する回転処理を行う。そして回転処理部54は、回転処理後の画像データをメモリ56に出力する。
【0050】
メモリ56は、フレームバッファとして機能し、例えば液晶表示パネル20の1画面分の画像データが記憶可能な容量を有する。
【0051】
第1及び第2のスケーラ100、110は、互いに同期して、又は互いに非同期で、メモリ120からの画像データを読み出す。そして、各スケーラは、メモリ56から読み出された画像データにより表される画像を原画像とし、該原画像のサイズを拡大又は縮小する処理を行って原画像のサイズの拡大処理後の画像データ又は該原画像のサイズの縮小処理後の画像データを出力する。
【0052】
オーバレイ処理部58は、第1及び第2のスケーラ100、110からの画像データに対して重ね合わせ処理を行う。なお、図2において、画像処理コントローラ50は、第2のスケーラ110及びオーバレイ処理部58が省略された構成を有していてもよい。
【0053】
ドライバI/F60は、表示ドライバ40に接続されたバスラインを介して入出力される信号のインタフェース処理を行う。例えば、ドライバI/F60は、オーバレイ処理部58により行われた重ね合わせ処理後の画像の画像データを、上記のバスラインを介して表示ドライバ40に出力する処理を行う。
【0054】
本実施形態では、原画像の画像サイズ(水平走査方向のサイズ、垂直方向のサイズ)を拡大又は縮小する際に、第1及び第2のスケーラ100、110が、原画像の画素を補間した補間画素の画素データを生成する。このとき、第1及び第2のスケーラ100、110は、原画像がテキスト情報、CG画像や自然画が混在していた場合であっても、拡大又は縮小後の画像が、ぼやけた画像やジャギーが目立つ画像とならないように、補間画素の画素データを求めることができる。更に、第1及び第2のスケーラ100、110は、原画像のべた画像(solid image)のエッジ付近において、拡大又は縮小後の画像においてリンギングの発生を回避するように補間画素の画素データを求めることができる。このような第1及び第2のスケーラ100、110は、拡大処理又は縮小処理対象の原画像の特性に応じて補間処理方法を切り替えることで、画質の劣化を抑え、且つ見やすい画像の画像データを求める。
【0055】
より具体的には、第1及び第2のスケーラ100、110は、第1及び第2の画素の補間画素の画素データを求める際に、原画像の画素データに対するフィルタ効果を有しない第1の補間処理方法と、該フィルタ効果を有する第2の補間処理方法とを切り替えながら、補間画素の画素データを求める。第1の補間処理方法では、補間画素の画素データとして、例えば原画像の第1又は第2の画素の画素データが出力される。第2の補間処理方法では、補間画素の画素データとして、少なくとも第1又は第2の画素の画素データを用いてフィルタ処理によって得られた画素データが出力される。このような第1の補間処理方法としては、例えば最近傍法(ニアレストネーバー法)がある。また、第2の補間処理方法としては、例えば双3次補間法(バイキュービック法)や線形補間法(バイリニア法)がある。双3次補間法は、フィルタ効果としてローパスフィルタとしての効果を有する。線形補間法は、フィルタ効果として三角フィルタとしての効果を有する。なお、線形補間法において、第1又は第2の画素が同一の画素データである場合には、結果として最近傍法と同じ出力結果が得られるため、上記の場合には最近傍法に代えて線形補間法を採用することができる。
【0056】
以下では、主として第1の補間処理方法として最近傍法を採用し、第2の補間処理方法として双3次補間法又は線形補間法を採用した場合を例に説明するが、本実施形態が以下で説明する補間処理方法に限定されるものではない。
【0057】
2.1 画像処理方法
図3に、本実施形態における画像処理方法の処理例のフロー図を示す。
【0058】
図3では、図2の第1のスケーラ100において、例えば1画素単位で行われる処理例を示すが、第2のスケーラ110においても同様の処理が行われる。
【0059】
まず、第1のスケーラ100は、当該画素がべた画像であるか否かを判別する(ステップS10)。べた画像は、画像の水平走査方向(水平方向)又は垂直走査方向(垂直方向)に隣接する2つの画素の画素データが同一である画像をいう。例えば、1つの画素の画素データがRGBの各色成分のデータにより構成される場合、色成分毎に両画素のデータが同一であり、且つ水平走査方向又は垂直走査方向に隣接する2つの画素が、べた画像を構成するということができる。同様に、例えば、1つの画素の画素データがYUVの輝度成分及び色差成分のデータにより構成される場合、両画素の輝度成分のデータが同一であり、且つ色差成分毎の該両画素のデータが同一である、水平走査方向又は垂直走査方向に隣接する2つの画素が、べた画像を構成するということができる。
【0060】
図4に、べた画像の判定処理の説明図を示す。
【0061】
図4では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。このとき、第1のスケーラ100では、画素PX0の画素データ(例えばRGBの各色成分のデータ)と画素PX1の画素データ(例えばRGBの各色成分のデータ)とが同一であるか否かを判別する。
【0062】
図3に戻って説明を続ける。ステップS10において、図4に示すように画素PX0、PX1の画素データが同一であり、画素PX0がべた画像を構成すると判別されたとき(ステップS10:Y)、第1のスケーラ100は、ニアレストネーバー法(最近傍法)で補間画素PXOUTの画素データを求める(ステップS11)。
【0063】
ステップS10において、画素PX0がべた画像を構成しないと判別されたとき(ステップS10:N)、第1のスケーラ100は、画素PX0の画素データを用いてエッジ部分にあるか否かを検出する(ステップS12)。
【0064】
図5に、エッジ部分の検出処理の説明図を示す。
【0065】
図5では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。このとき、第1のスケーラ100は、例えば画素PX0、PX1の画素データのみならず、画素PX−1の画素データを用いた一次微分によりエッジ量を検出し、該エッジ量が閾値以上のときにエッジ部分にあると判別する。こうすることで、1ドットの太さを有するテキスト情報をエッジ部分として検出できない場合を回避する。
【0066】
図3において、ステップS12で、画素PX0がエッジ部分にあることが検出されたとき(ステップS12:Y)、第1のスケーラ100は、ニアレストネーバー法で補間画素PXOUTの画素データを求める(ステップS11)。
【0067】
図6(A)、図6(B)に、ニアレストネーバー法の説明図を示す。
【0068】
図6(A)では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。ここで、画素PX0、PX1の距離を正規化して「1」とした場合に、ニアレストネーバー法により求められる補間画素PXOUTの画素データは、画素PX0、PX1のうち該補間画素PXOUTからの距離が近い方の画素の画素データとなる。
【0069】
画素PX0、補間画素PXOUTの距離をt(0≦t≦1)とすると、tが1/2より大きいか小さいかを判別することで、補間画素PXOUTの画素データを求めることができる。例えば図6(B)に示すように、tが1/2以下のとき、補間画素PXOUTの画素データとして画素PX0の画素データを採用し、tが1/2より大きいとき、補間画素PXOUTの画素データとして画素PX1の画素データを採用する。
【0070】
以上のように、本実施形態によれば、べた画像、エッジ部分にある画素を補間した補間画素の画素データは、ニアレストネーバー法により求められるため、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという事態を確実に回避できる。
【0071】
図3において、ステップS12において、画素PX0がエッジ部分にないことが検出されたとき(ステップS12:N)、第1のスケーラ100は、バイキュービック法(双3次補間法)で補間画素PXOUTの画素データを求める(ステップS13)。
【0072】
ステップS11又はステップS13の後、次の画素があるとき(ステップS14:Y)、第1のスケーラ100は、ステップS10に戻って処理を継続する。また、次の画素がないとき(ステップS14:N)、第1のスケーラ100は、一連の処理を終了する(エンド)。
【0073】
図7(A)、図7(B)に、バイキュービック法の説明図を示す。
【0074】
図7(A)では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。ここで、係数k−1、k0、k1、k2と、画素PX−1、PX0、PX1、PX2の画素データとにより、図7(B)に示すように補間画素PXOUTの画素データが求められる。
【0075】
以上のように、本実施形態によれば、べた画像ではなく、且つエッジ部分にない画素の補間画素については、バイキュービック法で画素データを求めるようにしたので、3次関数補間により精度良く画素を補間できる。
【0076】
なお、図3のステップS11では、ニアレストネーバー法により補間画素PXOUTの画素データを求めるものとしたが、本実施形態はこれに限定されるものではない。例えば、図3のステップS11において、ニアレストネーバー法に代えてバイリニア法(線形補間法)により補間画素PXOUTの画素データを求めてもよい。
【0077】
図8(A)、図8(B)に、バイリニア法の説明図を示す。
【0078】
図8(A)では、原画像の水平走査方向に隣接する画素PX0(第1の画素)、PX1(第2の画素)に対して、拡大処理後の画像の補間画素PXOUTを求めるものとする。ここで、画素PX0、PX1の距離を正規化して「1」とした場合に、画素PX0、補間画素PXOUTの距離をt(0≦t≦1)とすると、バイリニア法により求められる補間画素PXOUTの画素データは、図8(B)に示すように、画素PX0、PX1の画素データを合成したデータとなる。
【0079】
べた画像やエッジ部分にない画素については、補間前の画素データが補間画素の画素データとして出力できるので、ニアレストネーバー法に代えてバイリニア法を採用した場合であっても、テキスト情報やCG画像等の急峻なエッジがぼやけた画像となるという事態を確実に回避できる。
【0080】
ところで、エッジ部の検出を前後の画素のみの差分や一次微分のみで判定してしまうと、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像になる場合がある。そこで、本実施形態では、更に、当該画素の周囲画素が斜め線を構成するか否かを判別して、斜め線を構成すると判別されたときにバイキュービック法で補間画素の画素データを求める一方、斜め線を構成しないと判別されたときにニアレストネーバー法(又はバイリニア法)で補間画素の画素データを求める。こうすることで、斜め線を有するテキスト情報については、ジャギーの発生を抑えて滑らかな画像を得ることができるようになる。
【0081】
図9に、本実施形態における画像処理方法の他の処理例のフロー図を示す。
【0082】
図9において、図3と同一部分には同一符号を付し、適宜説明を省略する。図9に示す画像処理方法が図3に示す画像処理方法と異なる点は、当該画素の周囲画素が斜め線を構成するか否かを判別する処理が含まれている点である。
【0083】
即ち、図9では、第1のスケーラ100は、ステップS12において、画素PX0がエッジ部分にあることが検出されたとき(ステップS12:Y)、画素PX0の周囲画素(例えば画素PX0の水平走査方向に隣接する画素や垂直走査方向に隣接する画素)の少なくとも一部が斜め線を構成するか否かを判別する(ステップS20)。ステップS20において、画素PX0の周囲画素の少なくとも一部が、斜め線を構成すると判別されたとき(ステップS20:Y)、バイキュービック法で補間画素PXOUTの画素データを求める(ステップS13)。ステップS20において、画素PX0の周囲画素の少なくとも一部が、斜め線を構成しないと判別されたとき(ステップS20:N)、ニアレストネーバー法(又はバイリニア法)で補間画素PXOUTの画素データを求める(ステップS11)。なお、ステップS12において、画素PX0がエッジ部分にないことが検出されたとき(ステップS12:N)、第1のスケーラ100は、バイキュービック法(双3次補間法)で補間画素PXOUTの画素データを求める(ステップS13)。
【0084】
図10に、斜め線の判別処理の説明図を示す。
【0085】
図10では、原画像の画素PX0の水平走査方向に隣接する画素PX1、垂直走査方向に隣接する画素PX10、画素PX1に対し垂直走査方向に隣接する画素PX11が、テキスト情報の斜め線を構成しているものとする。このとき、図10に示すように、画素PX0の周囲画素のうち、画素PX1、PX10、PX11が斜め線を構成するため、第1のスケーラ100は、画素PX0の周囲画素の少なくとも一部が斜め線を構成するものと判別し、例えば画素PX0、PX1を補間した補間画素PXOUTの画素データをバイキュービック法により求める。
【0086】
次に、図11及び図12を用いて、本実施形態における斜め線の判別処理について説明する。
【0087】
図11に、本実施形態における斜め線の判別処理の処理例のフロー図を示す。図11に示す処理が、例えば図9のステップS20において行われる。
【0088】
図12に、図11の斜め線判定処理の説明図を示す。
【0089】
第1のスケーラ100は、画素PX0(第1の画素)を中心画素とする所与の画素ブロック単位で斜め線の判別処理を行う。以下では、画素ブロックが、画素PX0を中心画素としてその周囲の画素を含み、原画像の水平走査方向に3画素が並ぶと共に垂直走査方向に3画素が並ぶブロック(3×3ブロック)であるものとするが、2×2ブロックや7×7ブロック等の他のブロック単位でもよい。図12では、各画素(又は各画素の画素データ)をP0〜P8とすると、画素ブロックが、水平走査方向にP0、P1、P2、垂直走査方向にP0、P3、P6が並ぶものとする。この画素ブロックでは、P4が中心画素となる。
【0090】
第1のスケーラ100は、画素PX0の周囲の周囲画素の各画素の画素データと中心画素である画素PX0の画素データとの差分値を求める(ステップS30)。即ち、中心画素をCPとすると、画素ブロックを構成する各画素の差分値は、次のようになる。
【0091】
pj=Pj−CP (0≦j≦8、jは4を除く整数) ・・・(1)
次に第1のスケーラ100は、ステップS30で求めた画素ブロック内の差分値のうち、最大値と最小値を検出する(ステップS31)。なお、ステップS31において、第1のスケーラ100は、画素ブロック内の画素データの最大値と最小値とを検出するようにしてもよい。
【0092】
続いて、第1のスケーラ100は、ステップS31で検出した差分値(又は画素データ)の最大値と最小との間の閾値を生成する(ステップS32)。ステップS31で検出した最大値をMAX、最小値をMINとすると、第1のスケーラ100は、上記の閾値を、最大値と最小値との中間値((MAX+MIN)/2)として求めることができる。
【0093】
そして、第1のスケーラ100は、ステップS32で求めた閾値に基づいて、画素ブロック内の差分値を2値化する(ステップS33)。閾値以上の差分値を有する画素を「エッジ有」、閾値より小さい差分値を有する画素を「エッジ無」と判断できる。そして、第1のスケーラ100は、画素ブロック内で、閾値以上の差分値を有する画素に「1」、閾値より小さい差分値を有する画素に「0」を設定することで、ステップS33における2値化処理を実現できる。
【0094】
その後、第1のスケーラ100は、2値化処理された画素ブロックの画素のパターンを用いて、中心画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判別し(ステップS33)、一連の処理を終了する(エンド)。より具体的には、第1のスケーラ100は、2値化処理された画素ブロックの画素のパターンと予め設けられた斜め線判別用の判定パターンとにより、図12のP4を除くP0〜P8の画素データを有する画素の少なくとも一部が斜め線を構成するか否かを判別する。
【0095】
このとき、画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、周囲画素の少なくとも一部が斜め線を構成するか否かを判定することが望ましい。例えば、図12に示すように、P0の位置には「1」、P1の位置には「2」、P2の位置には「4」、`3の位置には「8」、・・・、P8の位置には「128」を重み付けし、2値化されたデータを数値化データとする。これにより、中心画素を除く周囲画素の2値化データが8ビットデータとして表すことができ、予め用意された判定パターンも同様に数値化データに変換しておけば、単純な数値比較により、周囲画素の少なくとも一部が斜め線を構成するか否かを判定することができるようになる。
【0096】
以上のような画像処理方法は、原画像の水平走査方向と垂直走査方向のそれぞれについて行うことが望ましい。これに対して、斜め線の判別処理は、原画像の水平走査方向と垂直走査方向のいずれか1方向について行うだけでよい。
【0097】
図13(A)、図13(B)に、本実施形態における水平走査方向の斜め線判別用の判定パターンの一例を示す。
【0098】
図13(A)に示す第1の判定パターンでは、中心画素CPの水平走査方向に隣接する画素P5´に対し、垂直走査方向に隣接する両画素P3´、P8´がエッジであることを示す「0」が設定されている。従って、第1の判定パターンを8ビットデータの数値化した場合、第1の判定パターンは「8´b0XXX_X0XX」という数値データで表される(「X」は「0」でも「1」でも可)。
【0099】
図13(B)に示す第2の判定パターンでは、中心画素CPの垂直走査方向に隣接する画素P2´、P7´がエッジではないことを示す「1」が設定されている。従って、第2の判定パターンを8ビットデータの数値化した場合、第2の判定パターンは「8´bX1XX_XX1X」という数値データで表される(「X」は「0」でも「1」でも可)。
【0100】
本実施形態において水平走査方向について斜め線の判別処理を行う場合、図13(A)に示す第1の判定パターン、図13(B)に示す第2の判定パターンを用いることで、斜め線を有するテキスト情報についても、簡素な構成で、且つ精度良く画素を補間できる。
【0101】
図14に、第1及び第2の判定パターンを用いた斜め線の判別処理の一例のフロー図を示す。図14に示す処理が、図11のステップS36において行われる。
【0102】
まず、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図13(A)に示す第1の判定パターンを表す判定データ(8´b0XXX_X0XX)とを比較し、当該画素ブロックのパターンが第1の判定パターンと一致するか否かを検出する(ステップS40)。
【0103】
第1の判定パターンと一致することが検出されたとき(ステップS40:Y)、第1のスケーラ100は、例えば当該画素ブロックが、垂直走査方向に伸びる縦パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS41)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0104】
ステップS40において、当該画素ブロックのパターンが第1の判定パターンと一致しないことが検出されたとき(ステップS40:N)、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図13(B)に示す第2の判定パターンを表す判定データ(8´bX1XX_XX1X)とを比較し、当該画素ブロックのパターンが第2の判定パターンと一致するか否かを検出する(ステップS42)。
【0105】
第2の判定パターンと一致することが検出されたとき(ステップS42:Y)、第1のスケーラ100は、例えば当該画素ブロックが、中心画素上に垂直走査方向に伸びる縦パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS41)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0106】
ステップS42において、当該画素ブロックのパターンが第2の判定パターンと一致しないことが検出されたとき(ステップS42:N)、第1のスケーラ100は、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成すると判別し(ステップS43)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにバイキュービック法で補間画素の画素データを求める。
【0107】
以上のように、本実施形態では、原画像の水平走査方向の補間画素の画素データを求める際に、当該画素ブロックの中心画素CPの水平走査方向に隣接する画素P5´に垂直走査方向に隣接する両画素P3´、P8´がエッジである場合、及び該両画素がエッジではなく、且つ中心画素CPの垂直走査方向に隣接する両画素P2´、P7´がエッジではない場合を除いて、該中心画素CPの周囲画素の少なくとも一部が斜め線を構成すると判定する。
【0108】
図15(A)、図15(B)に、本実施形態における水平走査方向の斜め線の判別処理結果の一例を示す。図15(A)は、斜め線ではないと判別された画素ブロックのパターンを示し、図15(B)は、斜め線であると判別された画素ブロックのパターンを示す。
【0109】
図15(A)、図15(B)に示すように斜め線を構成するか否かを判別し、斜め線であると判別されたときにバイキュービック法で補間画素の画素データを求め、斜め線ではないと判別されたときにニアレストネーバー法で補間画素の画素データを求めることで、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像を確実に回避できるようになる。
【0110】
図16(A)、図16(B)に、本実施形態における垂直走査方向の斜め線判別用の判定パターンの一例を示す。
【0111】
図16(A)に示す第3の判定パターンでは、中心画素CPの垂直走査方向に隣接する画素P7´に対し、水平走査方向に隣接する両画素P6´、P8´がエッジであることを示す「0」が設定されている。従って、第3の判定パターンを8ビットデータの数値化した場合、第3の判定パターンは「8´b0X0X_XXXX」という数値データで表される(「X」は「0」でも「1」でも可)。
【0112】
図16(B)に示す第4の判定パターンでは、中心画素CPの水平走査方向に隣接する画素P3´、P5´がエッジではないことを示す「1」が設定されている。従って、第4の判定パターンを8ビットデータの数値化した場合、第4の判定パターンは「8´bXXX1_1XXX」という数値データで表される(「X」は「0」でも「1」でも可)。
【0113】
本実施形態において垂直走査方向について斜め線の判別処理を行う場合、図16(A)に示す第3の判定パターン、図16(B)に示す第4の判定パターンを用いることで、斜め線を有するテキスト情報についても、簡素な構成で、且つ精度良く画素を補間できる。
【0114】
図17に、第3及び第4の判定パターンを用いた斜め線の判別処理の一例のフロー図を示す。図17に示す処理が、図11のステップS36において行われる。
【0115】
まず、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図16(A)に示す第3の判定パターンを表す判定データ(8´b0X0X_XXXX)とを比較し、当該画素ブロックのパターンが第3の判定パターンと一致するか否かを検出する(ステップS50)。
【0116】
第3の判定パターンと一致することが検出されたとき(ステップS50:Y)、第1のスケーラ100は、例えば当該画素ブロックが、水平走査方向に伸びる横パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS51)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0117】
ステップS50において、当該画素ブロックのパターンが第3の判定パターンと一致しないことが検出されたとき(ステップS50:N)、第1のスケーラ100は、図12に示すように重み付けられた画素ブロック単位の数値データと、図16(B)に示す第4の判定パターンを表す判定データ(8´bXXX1_1XXX)とを比較し、当該画素ブロックのパターンが第4の判定パターンと一致するか否かを検出する(ステップS52)。
【0118】
第4の判定パターンと一致することが検出されたとき(ステップS52:Y)、第1のスケーラ100は、例えば当該画素ブロックが、中心画素上に水平走査方向に伸びる横パターンを構成するものと判断して、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成しないと判別し(ステップS51)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにニアレストネーバー法で補間画素の画素データを求める。
【0119】
ステップS52において、当該画素ブロックのパターンが第4の判定パターンと一致しないことが検出されたとき(ステップS52:N)、第1のスケーラ100は、当該画素ブロックの中心画素の周囲画素の少なくとも一部が斜め線を構成すると判別し(ステップS53)、一連の処理を終了する(エンド)。このとき、第1のスケーラ100は、図9に示すようにバイキュービック法で補間画素の画素データを求める。
【0120】
以上のように、本実施形態では、原画像の垂直走査方向の補間画素の画素データを求める際に、当該画素ブロックの中心画素CPの垂直走査方向に隣接する画素P7´に水平走査方向に隣接する両画素P6´、P8´がエッジである場合、及び該両画素がエッジではなく、且つ中心画素CPの水平走査方向に隣接する両画素P3´、P5´がエッジではない場合を除いて、該中心画素CPの周囲画素の少なくとも一部が斜め線を構成すると判定する。
【0121】
図18(A)、図18(B)に、本実施形態における垂直走査方向の斜め線の判別処理結果の一例を示す。図18(A)は、斜め線ではないと判別された画素ブロックのパターンを示し、図18(B)は、斜め線であると判別された画素ブロックのパターンを示す。
【0122】
図18(A)、図18(B)に示すように斜め線を構成するか否かを判別し、斜め線であると判別されたときにバイキュービック法で補間画素の画素データを求め、斜め線ではないと判別されたときにニアレストネーバー法で補間画素の画素データを求めることで、斜め線を有するテキスト情報のエッジ部等において、ジャギーが目立つ画像を確実に回避できるようになる。
【0123】
以上、第1のスケーラ100の処理例について説明したが、第2のスケーラ110の処理についても同様である。また、上記の実施形態では、原画像の拡大処理における補間画素の画素データを求める例について説明したが、原画像の縮小処理における補間画素の画素データを求める場合も同様である。
【0124】
以上のように、本実施形態によれば、テキストやCG画像等のエッジが急峻な画像を拡大又は縮小する場合において、拡大処理後又は縮小処理後の画像がぼやけたり、リンギングを発生させたりすることなく、エッジ部分が維持されたシャープな画像を得ることができる。しかも、急峻なエッジが斜め線である場合にはジャギーの発生を確実に抑えるようにしたので、滑らかさも兼ね備えた画像を得ることができるようになる。
【0125】
2.2 第1及び第2のスケーラの構成例
次に、本実施形態における画像処理方法を実現する第1のスケーラ100の詳細な構成例について説明する。以下では、第1のスケーラ100の構成例について説明するが、第2の構成例110も第1のスケーラ100と同様の構成を有することができる。
【0126】
図19に、本実施形態における画像処理方法を実現する画像処理コントローラの第1のスケーラ100の構成例のブロック図を示す。
【0127】
第1のスケーラ100は、ラインバッファ200、補間データ演算部210、補間処理方法決定回路220、補間情報スケーラ230を含む。この第1のスケーラ100には、スケール処理(画像サイズの拡大処理間又は縮小処理)前の画素データが入力され、スケール処理後の画素データを出力する。
【0128】
ラインバッファ200は、原画像の水平走査方向の複数ラインの画素データをバッファリングする。
【0129】
補間データ演算部210は、原画像の水平走査方向又は垂直走査方向に隣接する第1及び第2の画素を補間する補間画素の画素データを求める。補間データ演算部210は、原画像の垂直走査方向に隣接する画素を補間する補間画素を求めるVスケーラ(垂直方向スケーラ)212と、原画像の水平走査方向に隣接する画素を補間する補間画素を求めるHスケーラ(水平方向スケーラ)214とを含む。Vスケーラ212が垂直走査方向に拡大又は縮小する処理を行った画素データに対して、Hスケーラ214が水平走査方向に拡大又は縮小する処理を行って、スケール処理後の画素データとして出力する。この順序でスケール処理を行うことで、水平走査方向に拡大処理された画素データを保存する必要がなくなり、順次Vスケーラ212に画素データを供給すればよいので、ラインバッファ200が有するラインバッファの数を削減できる。
【0130】
補間処理方法決定回路(補間処理方法決定部)220は、ラインバッファ200にバッファリングされた画素データに基づいて、原画像の水平走査方向又は垂直走査方向に隣接する画素の補間画素を求めるための補間処理方法を決定する。補間処理方法決定回路220は、原画像の垂直走査方向の補間処理方法を示すV方向補間情報(垂直走査方向の補間情報)と、原画像の水平走査方向の補間処理方法を示すH方向補間情報(水平走査方向の補間情報)とを出力する。V方向補間情報は、補間画素毎に、ニアレストネーバー法、バイキュービック法又はバイリニア法のいずれで補間するかを指定する情報である。H方向補間情報もまた、補間画素毎に、ニアレストネーバー法、バイキュービック法又はバイリニア法のいずれで補間するかを指定する情報である。以下では、例えば各補間情報が、補間画素毎に設けられた、ニアレストネーバー法又はバイキュービック法のいずれで補間するかを指定する1ビット情報であるものとするが、上記のようにニアレストネーバー法、バイキュービック法又はバイリニア法のいずれで補間するかを指定する場合には多値の情報であってもよい。
【0131】
補間データ演算部210は、V方向補間情報及びH方向補間情報により指定された補間処理方法で、補間画素の画素データを求める。より具体的には、Vスケーラ212は、補間処理方法決定回路220からのV方向補間情報に基づいて、ラインバッファ200にバッファリングされた画素データを垂直走査方向に拡大又は縮小する処理を行う。Hスケーラ214は、補間処理方法決定回路220からのH方向補間情報に基づいて、Vスケーラ212による処理後の画素データを水平走査方向に拡大又は縮小する処理を行う。
【0132】
また本実施形態では、Vスケーラ212による処理後の画素データに対して水平走査方向のスケール処理を行う。そのため、Vスケーラ212とHスケーラ214の構成を共通にして簡素化するために、補間処理方法決定回路220からH方向補間情報を補間情報スケーラ230で水平走査方向に拡大又は縮小する処理を行う。このとき補間情報スケーラ230は、ニアレストネーバー法(広義には第1の補間処理方法)によりH方向補間情報を拡大又は縮小する処理を行う。そして、Hスケーラ214は、補間情報スケーラ230によって拡大又は縮小された補間情報に基づいて、Vスケーラ212からの画素データを水平走査方向に拡大又は縮小する処理を行う。
【0133】
なお、補間情報スケーラ230に入力されるH方向補間情報(水平方向に補間前のH方向補間情報)は、例えば補間処理方法決定回路220にて既にリプリケーション(replication)補間されている。Vスケーラ212においてラインシフトが発生しない場合、補間処理方法決定回路220に入力される画素ブロックもまた、垂直走査方向にホールドされた画素データを有する。その際、V方向補間情報が垂直走査方向に拡大又は縮小されると同時に、H方向補間情報もまた垂直走査方向に拡大又は縮小処理される。例えば水平走査方向に画像を拡大する場合、H方向補間情報は垂直走査方向に拡大された後に水平走査方向に拡大されるようになっている。
【0134】
本実施形態によれば、補間情報スケーラ230を設け、画素データのみならず補間情報についても拡大又は縮小する処理を行って該補間情報自体を補間するようにしたので、Hスケーラ214の処理対象の画素データを保持させるバッファを用意させる必要がなくなり、Vスケーラ212及びHスケーラ214により順次画素データに対してスケール処理を行うことができるようになる。そのため、第1のスケーラ100(補間データ演算部212)の構成を大幅に簡素化できる。
【0135】
2.3 補間データ演算部
2.3.1 Vスケーラ
図20に、図19のVスケーラ212の構成例のブロック図を示す。
【0136】
図20では、Vスケーラ212が、原画像の拡大処理をするものとする。Vスケーラ212は、V方向用ルックアップテーブル(LUT)250V、補間処理制御回路260V、セレクタ262V、積和演算回路(第1の積和演算回路)264Vを含む。
【0137】
V方向用ルックアップテーブル250Vには、各係数セットが補間処理方法に対応した複数の係数群を有する複数種類の係数セットが予め登録されており、V方向補間情報により指定された補間処理方法に対応した係数セットを出力する。各係数セットは、積和演算回路264Vに供給され、積和演算回路264Vは、この係数セットと画素データとを用いて補間画素の画素データを求める。
【0138】
図20では、V方向補間情報がニアレストネーバー法又はバイキュービック法を指定する情報である。このとき、V方向用ルックアップテーブル250Vは、第1及び第2の係数セット252V、254V、セレクタ256Vを含む。第1の係数セット252Vは、第1の補間処理方法としてのニアレストネーバー法で補間画素の画素データを求めるために予め登録された係数群である。第2の係数セット254Vは、第2の補間処理方法で補間画素の画素データを求めるために予め登録された係数群である。セレクタ256Vは、V方向補間情報に基づいて第1及び第2の係数セット252V、254Vのいずれかを選択して出力する。
【0139】
補間処理制御回路260Vは、補間処理のタイミングや補間画素の位置を求める処理を行う。補間処理制御回路260Vで生成されたラインシフトイネーブルが積和演算回路264Vに供給される。補間処理制御回路260Vによって求められた補間画素の位置(座標)は、セレクタ262Vに供給される。
【0140】
セレクタ262Vは、補間処理制御回路260Vからの補間画素の座標に基づいて、V方向用ルックアップテーブル250Vからの係数セットを出力する。
【0141】
積和演算回路264Vは、ラインシフトイネーブルに同期して画素データをシフトし、セレクタ262Vからの係数セットを用いて補間画素データを求め、拡大処理後の画素データとして出力する。
【0142】
図21に、図20の積和演算回路264Vの構成例の回路図を示す。
【0143】
積和演算回路264Vは、データバッファ280V、シフトレジスタ282V、乗算器284V1〜284V4、加算器286Vを含む。データバッファ280Vには、画素データがバッファリングされる。シフトレジスタ282Vは、ラインシフトイネーブルがアクティブのときに、データバッファ280Vからの画素データを画素クロックでシフトする。乗算器284V1〜284V4は、シフトレジスタを構成するフリップフロップの出力と、係数セットk1、k2、k3、k4とを乗算する。加算器286Vは、乗算器284V1〜284V4の出力を加算する。
【0144】
例えば、係数セットとしてバイキュービック法を実現する係数セットが選択された場合、加算器286Vの出力は、図7(B)に示す式となる。
【0145】
図22に、係数に応じた積和演算回路264Vの動作説明図を示す。
【0146】
例えば、ある画素PX−1、PX0、PX1、PX2の画素データに対して第1の係数セットを与えた場合、図22のTK1のような特性が得られる。これに対して、同じ画素PX−1、PX0、PX1、PX2の画素データに対して第2の係数セットを与えた場合、図22のTK2のような特性が得られる。従って、係数セットを切り替え、補間画素の位置を参照することで、積和演算回路264Vでは、第1及び第2の補間処理方法を実現したり、フィルタ効果(フィルタ特性)を異ならせたりすることができる。
【0147】
また、第1の補間処理方法で補間画素の画素データを求める場合であっても、第1の補間処理方法に代えてバイキュービック法等の第2の補間処理方法により画素データを求めるようにしてもよい。この場合、第2の補間処理方法によるカットオフ周波数が、エッジ部が検出されないときに補間画素の画素データを求めるときの第2の補間処理方法のカットオフ周波数より高くなるような係数セットを用いる。こうすることで、回路を共用化できるようになる。
【0148】
2.3.2 Hスケーラ
図23に、図19のHスケーラ214の構成例のブロック図を示す。
【0149】
図23では、Hスケーラ214が、原画像の拡大処理をするものとする。Hスケーラ214は、H方向用ルックアップテーブル(LUT)250H、補間処理制御回路260H、セレクタ262H、積和演算回路(第2の積和演算回路)264Hを含む。
【0150】
H方向用ルックアップテーブル250Hには、各係数セットが複数の係数群を有する複数種類の係数セットが予め登録されており、補間情報スケーラ230により拡大処理されたスケール処理後のH方向補間情報により指定された補間処理方法に対応した係数セットを出力する。各係数セットは、積和演算回路264Hに供給され、積和演算回路264Hは、この係数セットと画素データとを用いて補間画素の画素データを求める。
【0151】
図23では、H方向補間情報がニアレストネーバー法又はバイキュービック法を指定する情報である。このとき、H方向用ルックアップテーブル250Hは、第3及び第4の係数セット252H、254H、セレクタ256Hを含む。第3の係数セット252Hは、第1の補間処理方法としてのニアレストネーバー法で補間画素の画素データを求めるために予め登録された係数群である。第4の係数セット254Hは、第2の補間処理方法で補間画素の画素データを求めるために予め登録された係数群である。セレクタ256Hは、スケール処理後のH方向補間情報に基づいて第3及び第4の係数セット252H、254Hのいずれかを選択して出力する。
【0152】
補間処理制御回路260Hは、補間処理のタイミングや補間画素の位置を求める処理を行う。補間処理制御回路260Hで生成された画素シフトイネーブルが積和演算回路264Hに供給される。補間処理制御回路260Hによって求められた補間画素の位置(座標)は、セレクタ262Hに供給される。
【0153】
セレクタ262Hは、補間処理制御回路260Hからの補間画素の座標に基づいて、H方向用ルックアップテーブル250Hからの係数セットを出力する。
【0154】
積和演算回路264Hは、画素シフトイネーブルに同期して画素データをシフトし、セレクタ262Hからの係数セットを用いて補間画素データを求め、拡大処理後の画素データとして出力する。
【0155】
積和演算回路264Hの構成は、図21に示す積和演算回路264Vと同様であり、詳細な説明を省略する。
【0156】
2.4 補間処理方法決定回路
図24に、図19の補間処理方法決定回路220の構成の概要を示す。
【0157】
補間処理方法決定回路220は、V方向補間処理方法決定回路300と、H方向補間処理方法決定回路350とを含む。V方向補間処理方法決定回路300は、ラインバッファ200に蓄積された画素データに基づいてV方向補間情報を生成する。H方向補間処理方法決定回路350は、ラインバッファ200に蓄積された画素データに基づいてH方向補間情報を生成する。
【0158】
2.4.1 V方向補間処理方法決定回路
図25に、図24のV方向補間処理方法決定回路300の構成例のブロック図を示す。
【0159】
V方向補間処理方法決定回路300は、べた画像判定部としての比較器310V、原画像の垂直走査方向に対する斜め線判定部320V、エッジ検出部としてのエッジ検出器340V、決定回路348Vを含む。なおV方向補間処理方法決定回路300は、図25に示すすべての回路ブロックを含む必要はなく、図25のいずれかの回路ブロックが省略されていてもよい。
【0160】
以下では、画素ブロックでは、原画像の水平走査方向に3画素P0、P1、P2、原画像の垂直走査方向に3画素P0、P3、P6が並ぶものとする。このとき、中心画素の画素データはP4となる。
【0161】
比較器310Vは、原画像の垂直走査方向に隣接する画素P4、P7(第1及び第2の画素)の画素データが同一であるか否かを判定する。斜め線判定部320Vは、中心画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定する。
【0162】
エッジ検出器340Vは、少なくとも画素P4、P7(第1及び第2の画素)を含む複数の画素の画素データに基づいてエッジを検出する。本実施形態では、エッジ検出器340Vが、画素P4、P7(第1及び第2の画素)の画素データを用いたハイパスフィルタ処理の結果の絶対値に基づいて、エッジを検出する。より具体的には、エッジ検出器340Vが、次の一次微分を用いて、外部から設定可能な閾値と比較することでエッジを検出する。
【0163】
Egv = |−P1+2×P4−P7| ・・・(2)
エッジ検出器340Vは、エッジ成分Egvが閾値THvより大きいとき、エッジを検出したと判定し、エッジ成分Egvが閾値THv以下のとき、エッジを検出しないと判定する。(2)式を用いてエッジを検出することで、例えば1ドット文字のような画像や、周波数成分の高いエッジを精度良く検出できるようになる。
【0164】
決定回路348Vは、比較器310Vの出力S、斜め線判定部320Vの出力T、エッジ検出器340Vの出力Uに基づいて、V方向補間情報である出力Xを生成する。より具体的には、決定回路348Vは、以下の論理式で出力Xを生成する。
【0165】
X=!S & !T & !U ・・・(3)
上記の式において、「&」は論理積、「!」は否定を意味し、例えば「!S」は「S」が偽のときに真であることを意味する。このようなV方向補間情報では、出力Xが真のときバイキュービック法(第2の補間処理方法)で補間するように指定し、出力Xが偽のときニアレストネーバー法(第1の補間処理方法)で補間するように指定する。
【0166】
こうして、斜め線判定部320Vの機能がディセーブルのとき、決定回路348Vは、画素P4、P7の画素データが同一であると判定されたとき、補間画素の画素データとしてニアレストネーバー法で補間画素の画素データを求めるように指定できる。また決定回路348Vは、エッジが検出されたとき、バイキュービック法により補間画素の画素データを求めるように指定できる。更に決定回路348Vは、該エッジが検出されないとき、バイキュービック法により補間画素の画素データを求めるように指定できる。
【0167】
また、斜め線判定部320Vの機能がイネーブルのとき、決定回路348Vは、エッジが検出されず、且つ画素P4の周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、補間画素の画素データをバイキュービック法により求めるように指定できる。また決定回路348Vは、該エッジが検出されず、且つ上記の周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、補間画素の画素データをニアレストネーバー法により求めるように指定できる。
【0168】
なお、図25において、斜め線判定部320Vは、差分値演算部322V、2値化回路(2値化部)324V、最小値フィルタ(以下、MINフィルタ)326V、最大値フィルタ(以下、MAXフィルタ)328V、閾値生成回路330V、パターン比較器332Vを含む。
【0169】
差分値演算部322Vは、画素P4(第1の画素)を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素(P0〜P3、P5〜P8)の各画素の画素データと中心画素の画素データとの差分値を求める。2値化回路324Vは、画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、画素ブロック内の差分値を2値化する。この閾値は、閾値生成回路330Vによって生成される。閾値生成回路330Vは、MINフィルタ326Vからの最小値、MAXフィルタ328Vからの最大値を用いて閾値を生成する。MINフィルタ326Vは、画素ブロックの画素データの最小値を求める。MAXフィルタ328Vは、画素ブロックの画素データの最大値を求める。以上のような構成により、斜め線判定部320Vは、図11、図12に示す動作を実現する。
【0170】
パターン比較器332Vには、数値化された判定パターンが入力され、2値化回路324Vで2値化されたデータと比較する。パターン比較器332Vの出力が、斜め線の判定結果となる。
【0171】
2.4.2 H方向補間処理方法決定回路
図26に、図24のH方向補間処理方法決定回路350の構成例のブロック図を示す。
【0172】
H方向補間処理方法決定回路350は、べた画像判定部としての比較器310H、原画像の水平走査方向に対する斜め線判定部320H、エッジ検出部としてのエッジ検出器340H、決定回路348Hを含む。なおH方向補間処理方法決定回路350は、図26に示すすべての回路ブロックを含む必要はなく、図26のいずれかの回路ブロックが省略されていてもよい。
【0173】
以下では、画素ブロックでは、原画像の水平走査方向に3画素P0、P1、P2、原画像の垂直走査方向に3画素P0、P3、P6が並ぶものとする。このとき、中心画素の画素データはP4となる。
【0174】
比較器310Hは、原画像の水平走査方向に隣接する画素P4、P5(第1及び第2の画素)の画素データが同一であるか否かを判定する。斜め線判定部320Hは、中心画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定する。
【0175】
エッジ検出器340Hは、少なくとも画素P4、P5(第1及び第2の画素)を含む複数の画素の画素データに基づいてエッジを検出する。本実施形態では、エッジ検出器340Hが、画素P4、P5(第1及び第2の画素)の画素データを用いたハイパスフィルタ処理の結果の絶対値に基づいて、エッジを検出する。より具体的には、エッジ検出器340Hが、次の一次微分を用いて、外部から設定可能な閾値と比較することでエッジを検出する。
【0176】
Egh = |−P3+2×P4−P5| ・・・(4)
エッジ検出器340Hは、エッジ成分Eghが閾値THhより大きいとき、エッジを検出したと判定し、エッジ成分Eghが閾値THh以下のとき、エッジを検出しないと判定する。(4)式を用いてエッジを検出することで、例えば1ドット文字のような画像や、周波数成分の高いエッジを精度良く検出できるようになる。
【0177】
決定回路348Hは、比較器310Hの出力S、斜め線判定部320Hの出力T、エッジ検出器340Hの出力Uに基づいて、H方向補間情報である出力Xを生成する。より具体的には、決定回路348Hは、以下の論理式で出力Xを生成する。
【0178】
X=!S & !T & !U ・・・(5)
上記の式において、「&」は論理積、「!」は否定を意味し、例えば「!S」は「S」が偽のときに真であることを意味する。このようなV方向補間情報では、出力Xが真のときバイキュービック法(第2の補間処理方法)で補間するように指定し、出力Xが偽のときニアレストネーバー法(第1の補間処理方法)で補間するように指定する。
【0179】
こうして、斜め線判定部320Hの機能がディセーブルのとき、決定回路348Hは、画素P4、P5の画素データが同一であると判定されたとき、補間画素の画素データとしてニアレストネーバー法で補間画素の画素データを求めるように指定できる。また決定回路348Hは、エッジが検出されたとき、バイキュービック法により補間画素の画素データを求めるように指定できる。更に決定回路348Vは、該エッジが検出されないとき、バイキュービック法により補間画素の画素データを求めるように指定できる。
【0180】
また、斜め線判定部320Hの機能がイネーブルのとき、決定回路348Hは、エッジが検出されず、且つ画素P4の周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、補間画素の画素データをバイキュービック法により求めるように指定できる。また決定回路348Hは、該エッジが検出されず、且つ上記の周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、補間画素の画素データをニアレストネーバー法により求めるように指定できる。
【0181】
なお、図26において、斜め線判定部320Hは、差分値演算部322H、2値化回路(2値化部)324H、最小値フィルタ(以下、MINフィルタ)326H、最大値フィルタ(以下、MAXフィルタ)328H、閾値生成回路330H、パターン比較器332Hを含む。
【0182】
差分値演算部322Hは、画素P4(第1の画素)を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素(P0〜P3、P5〜P8)の各画素の画素データと中心画素の画素データとの差分値を求める。2値化回路324Hは、画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、画素ブロック内の差分値を2値化する。この閾値は、閾値生成回路330Hによって生成される。閾値生成回路330Hは、MINフィルタ326Hからの最小値、MAXフィルタ328Hからの最大値を用いて閾値を生成する。MINフィルタ326Hは、画素ブロックの画素データの最小値を求める。MAXフィルタ328Hは、画素ブロックの画素データの最大値を求める。以上のような構成により、斜め線判定部320Hは、図11、図12に示す動作を実現する。
【0183】
パターン比較器332Hには、数値化された判定パターンが入力され、2値化回路324Hで2値化されたデータと比較する。パターン比較器332Hの出力が、斜め線の判定結果となる。
【0184】
2.5 補間情報スケーラ
図27に、図19の補間情報スケーラ230の構成例のブロック図を示す。
【0185】
図27では、補間情報スケーラ230が、補間方法としてダブリングにより水平走査方向に拡大するものとして説明するが、その補間方法に限定されるものではない。また、Hスケーラ214で原画像が縮小される場合には、補間情報スケーラ230が、公知の補間処理方法で、H方向補間情報を水平走査方向に縮小すればよい。
【0186】
補間情報スケーラ230は、セレクタ380、フリップフロップ390を含む。補間情報スケーラ230には、拡大前のH方向補間情報が入力され、該H方向補間情報を拡大した補間情報を出力する。
【0187】
セレクタ380は、画素シフトイネーブルがアクティブのとき拡大前のH方向補間情報を選択して出力し、画素シフトイネーブルが非アクティブ部のとき拡大後のH方向補間情報を選択して出力する。フリップフロップ390は、表示用(表示ドライバ出力用)の画素クロックに基づいて、セレクタ380の出力をラッチする。フリップフロップ390にラッチされたセレクタ380の出力が、拡大後のH方向補間情報となる。
【0188】
以上のような構成で、画素シフトイネーブルで拡大処理のタイミングを制御することで、ニアレストネーバー法でH方向補間情報の拡大処理を実現できる。本実施形態によれば、補間情報自体がフィルタリングされることなく、そのまま補間前の情報が維持され、簡素な構成で補間情報の拡大又は縮小ができる。そのため、Hスケーラ214も既存の構成を流用できる。
【0189】
3. 電子機器
図28に、本実施形態における電子機器としての携帯電話機の構成例のブロック図を示す。図28において、図1と同一部分には同一符号を付し、適宜説明を省略する。
【0190】
携帯電話機900は、カメラモジュール910を含む。カメラモジュール910は、CCDカメラを含み、CCDカメラで撮像した画像のデータを、例えばYUVフォーマットで画像処理コントローラ50(画像処理装置)に供給する。
【0191】
携帯電話機900は、液晶表示パネル20を含む。液晶表示パネル20は、表示ドライバ40(駆動部)によって駆動される。液晶表示パネル20は、複数のゲート線、複数のソース線、複数の画素を含む。
【0192】
表示ドライバ40は、ゲートドライバ42、ソースドライバ44及び電源回路46を含む。ゲートドライバ42は、液晶表示パネル20(表示パネル)の複数のゲート線を走査する。ソースドライバ44は、液晶表示パネル20の複数のソース線を、画像データに基づいて駆動する。電源回路46は、ゲートドライバ42、ソースドライバ44及び液晶表示パネル20の電圧を生成する。電源回路46は、ソースドライバ44及びゲートドライバ42に接続され、各ドライバに対して、駆動用の電源電圧を供給する。また電源回路46は、液晶表示パネル20の対向電極に、対向電極電圧Vcomを供給する。
【0193】
画像処理コントローラ50は、表示ドライバ40に接続され、ソースドライバ44に対してRGBフォーマットの画像データを供給する。
【0194】
ベースバンドエンジン10は、画像処理コントローラ50に接続される。ベースバンドエンジン10は、画像処理コントローラ50を制御する。またベースバンドエンジン10は、アンテナ960を介して受信された画像データを、変復調部950で復調した後、画像処理コントローラ50に供給できる。画像処理コントローラ50は、この画像データに基づき、ソースドライバ44及びゲートドライバ42により液晶表示パネル20に表示させる。
【0195】
ベースバンドエンジン10は、カメラモジュール910で生成された画像データを変復調部950で変調した後、アンテナ960を介して他の通信装置への送信を指示できる。
【0196】
ベースバンドエンジン10は、操作入力部970からの操作情報に基づいて画像データの送受信処理、カメラモジュール910の撮像、液晶表示パネル20の表示処理を行う。
【0197】
なお、本発明は上述した実施の形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形実施が可能である。例えば、本発明は上述の液晶表示パネルの駆動に適用されるものに限らず、エレクトロルミネッセンス、プラズマディスプレイ装置の駆動に適用可能である。
【0198】
また、本発明のうち従属請求項に係る発明においては、従属先の請求項の構成要件の一部を省略する構成とすることもできる。また、本発明の1の独立請求項に係る発明の要部を、他の独立請求項に従属させることもできる。
【図面の簡単な説明】
【0199】
【図1】本実施形態を携帯電話機に適用した場合の構成例を示す図。
【図2】図1の画像処理コントローラの構成例のブロック図。
【図3】本実施形態における画像処理方法の処理例のフロー図。
【図4】べた画像の判定処理の説明図。
【図5】エッジ部分の検出処理の説明図。
【図6】図6(A)、図6(B)はニアレストネーバー法の説明図。
【図7】図7(A)、図7(B)はバイキュービック法の説明図。
【図8】図8(A)、図8(B)はバイリニア法の説明図。
【図9】本実施形態における画像処理方法の他の処理例のフロー図。
【図10】斜め線の判別処理の説明図。
【図11】本実施形態における斜め線の判別処理の処理例のフロー図。
【図12】図11の斜め線判定処理の説明図。
【図13】図13(A)、図13(B)は本実施形態における水平走査方向の斜め線判別用の判定パターンの一例を示す図。
【図14】第1及び第2の判定パターンを用いた斜め線の判別処理の一例のフロー図。
【図15】図15(A)、図15(B)は本実施形態における水平走査方向の斜め線の判別処理結果の一例を示す図。
【図16】図16(A)、図16(B)は本実施形態における垂直走査方向の斜め線判別用の判定パターンの一例を示す図。
【図17】第3及び第4の判定パターンを用いた斜め線の判別処理の一例のフロー図。
【図18】図18(A)、図18(B)は本実施形態における垂直走査方向の斜め線の判別処理結果の一例を示す図。
【図19】本実施形態における画像処理方法を実現する画像処理コントローラの第1のスケーラの構成例のブロック図。
【図20】図19のVスケーラの構成例のブロック図を示す。
【図21】図20の積和演算回路の構成例の回路図。
【図22】係数に応じた積和演算回路の動作説明図。
【図23】図19のHスケーラの構成例のブロック図。
【図24】図19の補間処理方法決定回路の構成の概要を示す図。
【図25】図24のV方向補間処理方法決定回路の構成例のブロック図。
【図26】図24のH方向補間処理方法決定回路の構成例のブロック図。
【図27】図19の補間情報スケーラの構成例のブロック図。
【図28】本実施形態における電子機器としての携帯電話機の構成例のブロック図。
【符号の説明】
【0200】
10 ベースバンドエンジン、 20 液晶表示パネル、 30、32 ガラス基板、
40 表示ドライバ、 42 ゲートドライバ、 44 ソースドライバ、
46 電源回路、 50 画像処理コントローラ、 52 ホストI/F、
54 回転処理部、 56 メモリ、 58 オーバレイ処理部、
60 ドライバI/F、 100 第1のスケーラ、 110 第2のスケーラ、
200 ラインバッファ、 210 補間データ演算部、 212 Vスケーラ、
214 Hスケーラ、 220 補間処理方法決定回路、 230 補間情報スケーラ、
250H、250V V方向用ルックアップテーブル、 252H 第3の係数セット、
254H 第4の係数セット、 252V 第1の係数セット、
254V 第2の係数セット、
256H、262H、256V、262V、380 セレクタ、
260H、260V 補間処理制御回路、 264H、264V 積和演算回路、
280V データバッファ、 282V シフトレジスタ、
284V1〜284V4 乗算器、 286V 加算器、
300 V方向補間処理方法決定回路、 310H、310V 比較器、
320H、320V 斜め線判定部、 322H、322V 差分値演算部、
324H、324V 2値化回路、 326H、326V MINフィルタ、
328H、328V MAXフィルタ、 330H、330V 閾値生成回路、
332H、332V パターン比較器、 340H、340V エッジ検出器、
348H、348V 決定回路、 350 H方向補間処理方法決定回路、
390 フリップフロップ、 900 携帯電話機、 910 カメラモジュール、
950 変復調部、 960 アンテナ、 970 操作入力部
【特許請求の範囲】
【請求項1】
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理方法であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するステップと、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記第1及び第2の画素の補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により、該補間画素の画素データを求めるステップと、
前記第1及び第2の画素の画素データが同一ではないと判定されたとき、少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するステップと、
前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求めるステップと、
前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求めるステップとを含むことを特徴とする画像処理方法。
【請求項2】
請求項1において、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であることを特徴とする画像処理方法。
【請求項3】
請求項1又は2において、
前記複数の画素の画素データに基づいてエッジが検出されないとき、前記第1の画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップと、
前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素の画素データを前記第2の補間処理方法により求めるステップと、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを前記第1の補間処理方法により求めるステップとを含むことを特徴とする画像処理方法。
【請求項4】
請求項3において、
前記第1の補間処理方法が、
線形補間法であることを特徴とする画像処理方法。
【請求項5】
請求項3又は4において、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高いことを特徴とする画像処理方法。
【請求項6】
請求項3乃至5のいずれかにおいて、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップが、
前記第1の画素を中心画素とする所与の画素ブロック単位で、前記周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求めるステップと、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化するステップと、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップとを含むことを特徴とする画像処理方法。
【請求項7】
請求項3乃至6のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理方法。
【請求項8】
請求項3乃至7のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理方法。
【請求項9】
請求項6乃至8のいずれかにおいて、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することを特徴とする画像処理方法。
【請求項10】
請求項1乃至9のいずれかにおいて、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することを特徴とする画像処理方法。
【請求項11】
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理装置であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するベタ画像判定部と、
少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するエッジ検出部と、
前記第1及び第2の画素の補間画素の画素データを求める補間画素データ演算部とを含み、
前記補間画素データ演算部が、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求めることを特徴とする画像処理装置。
【請求項12】
請求項11において、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であることを特徴とする画像処理装置。
【請求項13】
請求項11又は12において、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定する斜め線判定部を含み、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第2の補間処理方法により求め、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第1の補間処理方法により求めることを特徴とする画像処理装置。
【請求項14】
請求項13において、
前記第1の補間処理方法が、
線形補間法であることを特徴とする画像処理装置。
【請求項15】
請求項13又は14において、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高いことを特徴とする画像処理装置。
【請求項16】
請求項13乃至15のいずれかにおいて、
前記斜め線判定部が、
前記第1の画素を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求める差分値演算部と、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化する2値化部とを含み、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することを特徴とする画像処理装置。
【請求項17】
請求項13乃至16のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理装置。
【請求項18】
請求項13乃至17のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理装置。
【請求項19】
請求項16乃至18のいずれかにおいて、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することを特徴とする画像処理装置。
【請求項20】
請求項13乃至19のいずれかにおいて、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することを特徴とする画像処理装置。
【請求項21】
請求項13乃至20のいずれか記載の画像処理装置と、
前記画像処理装置によって画像データが供給される駆動部と、
前記駆動部によって駆動される表示パネルとを含むことを特徴とする電子機器。
【請求項1】
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理方法であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するステップと、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記第1及び第2の画素の補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により、該補間画素の画素データを求めるステップと、
前記第1及び第2の画素の画素データが同一ではないと判定されたとき、少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するステップと、
前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求めるステップと、
前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求めるステップとを含むことを特徴とする画像処理方法。
【請求項2】
請求項1において、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であることを特徴とする画像処理方法。
【請求項3】
請求項1又は2において、
前記複数の画素の画素データに基づいてエッジが検出されないとき、前記第1の画素の周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップと、
前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素の画素データを前記第2の補間処理方法により求めるステップと、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを前記第1の補間処理方法により求めるステップとを含むことを特徴とする画像処理方法。
【請求項4】
請求項3において、
前記第1の補間処理方法が、
線形補間法であることを特徴とする画像処理方法。
【請求項5】
請求項3又は4において、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高いことを特徴とする画像処理方法。
【請求項6】
請求項3乃至5のいずれかにおいて、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップが、
前記第1の画素を中心画素とする所与の画素ブロック単位で、前記周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求めるステップと、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化するステップと、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定するステップとを含むことを特徴とする画像処理方法。
【請求項7】
請求項3乃至6のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理方法。
【請求項8】
請求項3乃至7のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理方法。
【請求項9】
請求項6乃至8のいずれかにおいて、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することを特徴とする画像処理方法。
【請求項10】
請求項1乃至9のいずれかにおいて、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することを特徴とする画像処理方法。
【請求項11】
原画像の拡大画像又は該原画像の縮小画像の画素データを求めるための画像処理装置であって、
前記原画像の水平方向又は垂直方向に隣接する第1及び第2の画素の画素データが同一であるか否かを判定するベタ画像判定部と、
少なくとも前記第1及び第2の画素を含む複数の画素の画素データに基づいてエッジを検出するエッジ検出部と、
前記第1及び第2の画素の補間画素の画素データを求める補間画素データ演算部とを含み、
前記補間画素データ演算部が、
前記第1及び第2の画素の画素データが同一であると判定されたとき、前記補間画素の画素データとして前記第1又は第2の画素の画素データを出力する第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されたとき、前記第1の補間処理方法により前記補間画素の画素データを求め、前記複数の画素の画素データに基づいてエッジが検出されないとき、フィルタ効果を有する第2の補間処理方法により前記補間画素の画素データを求めることを特徴とする画像処理装置。
【請求項12】
請求項11において、
前記第1の補間処理方法が、最近傍法であり、
前記第2の補間処理方法が、双3次補間法であることを特徴とする画像処理装置。
【請求項13】
請求項11又は12において、
前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定する斜め線判定部を含み、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成すると判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第2の補間処理方法により求め、
前記複数の画素の画素データに基づいてエッジが検出されず、且つ前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素データ演算部が、前記補間画素の画素データを前記第1の補間処理方法により求めることを特徴とする画像処理装置。
【請求項14】
請求項13において、
前記第1の補間処理方法が、
線形補間法であることを特徴とする画像処理装置。
【請求項15】
請求項13又は14において、
前記周囲画素の少なくとも一部が斜め線を構成しないと判定されたとき、前記補間画素の画素データを、前記第1の補間処理方法に代えて前記第2の補間処理方法により求め、
該第2の補間処理方法によるカットオフ周波数が、
前記複数の画素の画素データに基づいてエッジが検出されないときに前記補間画素の画素データを求める第2の補間処理方法のカットオフ周波数より高いことを特徴とする画像処理装置。
【請求項16】
請求項13乃至15のいずれかにおいて、
前記斜め線判定部が、
前記第1の画素を中心画素とする所与の画素ブロック単位で、該中心画素の周囲画素の各画素の画素データと前記中心画素の画素データとの差分値を求める差分値演算部と、
前記画素ブロック内の画素データの最大値と最小値との間に設定された閾値に基づいて、前記画素ブロック内の差分値を2値化する2値化部とを含み、
前記画素ブロックの2値化されたデータに基づいて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することを特徴とする画像処理装置。
【請求項17】
請求項13乃至16のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の水平方向の前記補間画素の画素データを求める際に、前記中心画素の水平方向に隣接する画素に垂直方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の垂直方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理装置。
【請求項18】
請求項13乃至17のいずれかにおいて、
前記画素ブロックが、前記中心画素を中心に、前記水平方向に3画素が並ぶと共に前記垂直方向に3画素が並ぶブロックであり、
前記原画像の垂直方向の前記補間画素の画素データを求める際に、前記中心画素の垂直方向に隣接する画素に水平方向に隣接する両画素がエッジである場合、及び該両画素がエッジではなく、且つ前記中心画素の水平方向に隣接する両画素がエッジではない場合を除いて、前記周囲画素の少なくとも一部が斜め線を構成すると判定することを特徴とする画像処理装置。
【請求項19】
請求項16乃至18のいずれかにおいて、
前記画素ブロックの各位置を重み付けすることにより得られる数値データを用いて、前記周囲画素の少なくとも一部が斜め線を構成するか否かを判定することを特徴とする画像処理装置。
【請求項20】
請求項13乃至19のいずれかにおいて、
前記第1及び第2の画素の画素データを用いたハイパスフィルタ処理の結果に基づいて、前記エッジを検出することを特徴とする画像処理装置。
【請求項21】
請求項13乃至20のいずれか記載の画像処理装置と、
前記画像処理装置によって画像データが供給される駆動部と、
前記駆動部によって駆動される表示パネルとを含むことを特徴とする電子機器。
【図1】


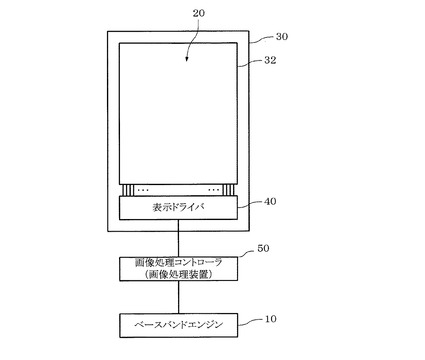
【図2】
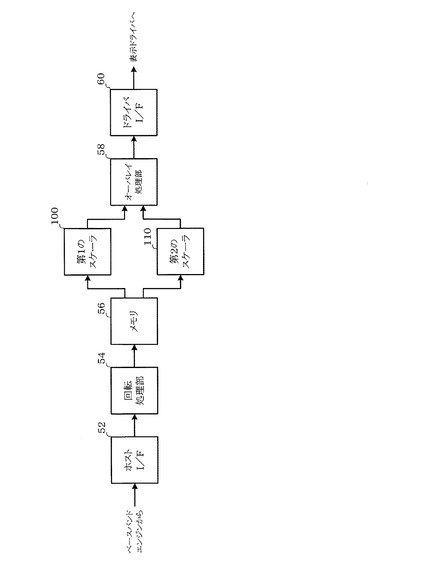
【図3】

【図4】
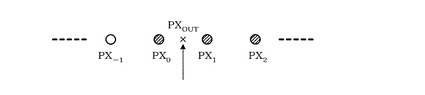
【図5】

【図6】
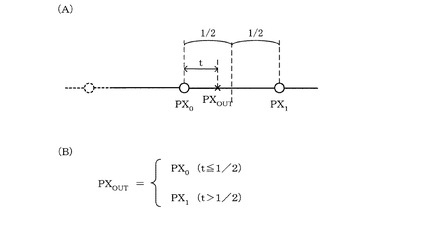
【図7】
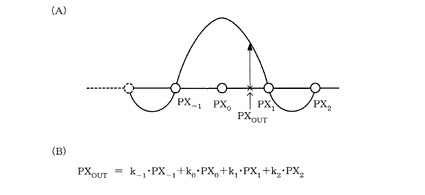
【図8】
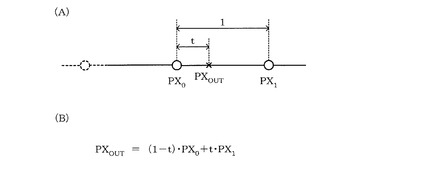
【図9】

【図10】
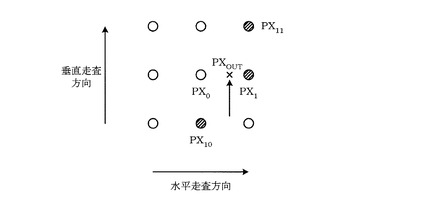
【図11】
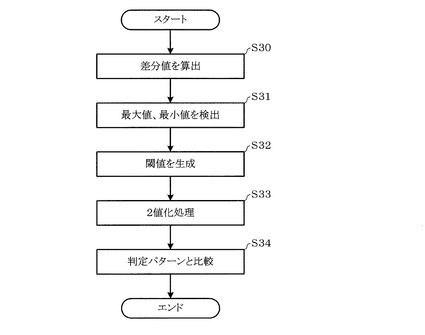
【図12】
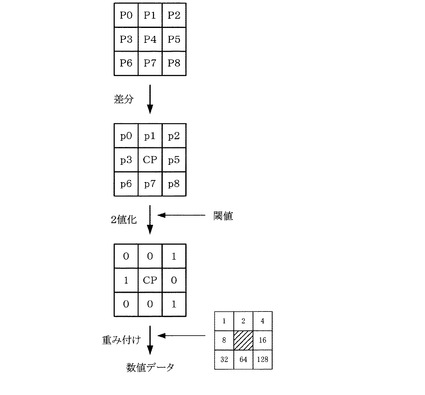
【図13】
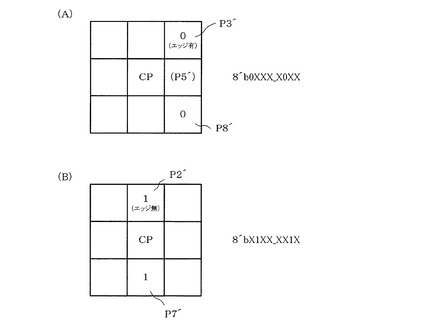
【図14】
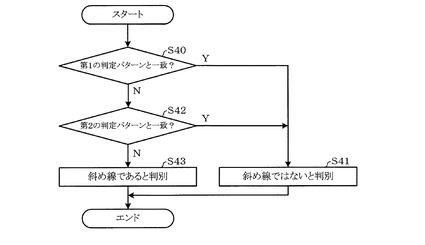
【図15】
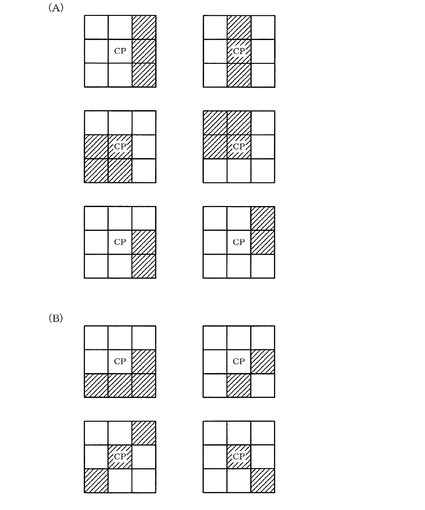
【図16】
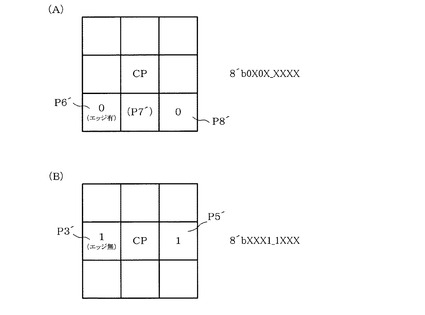
【図17】

【図18】
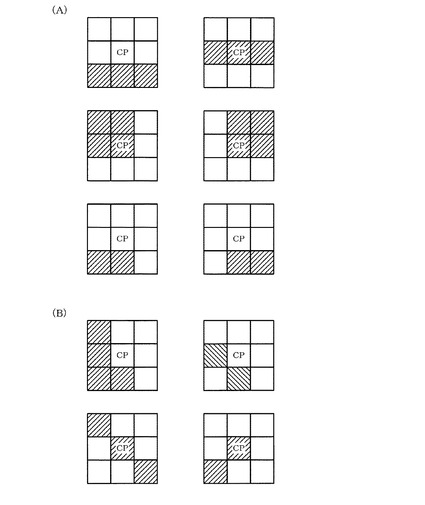
【図19】
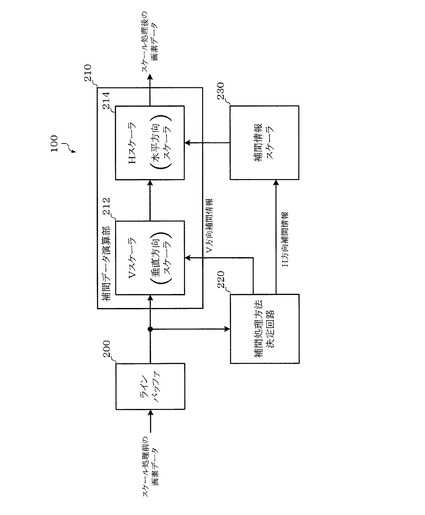
【図20】
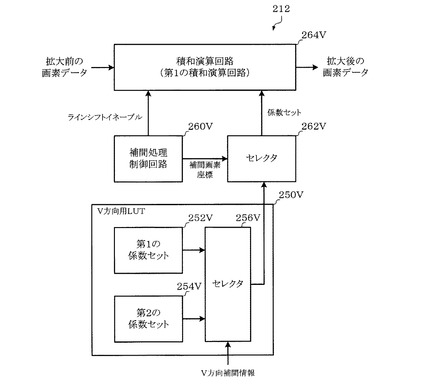
【図21】
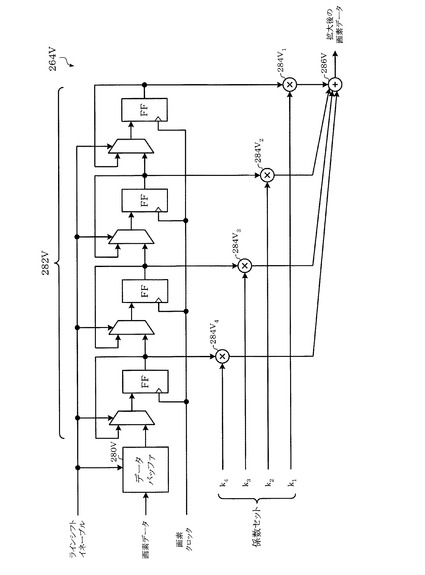
【図22】

【図23】
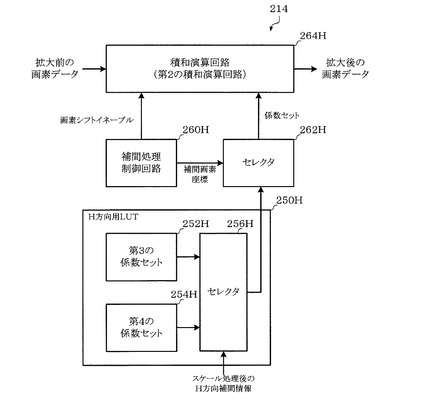
【図24】
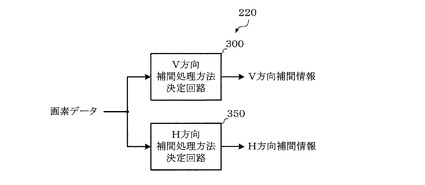
【図25】
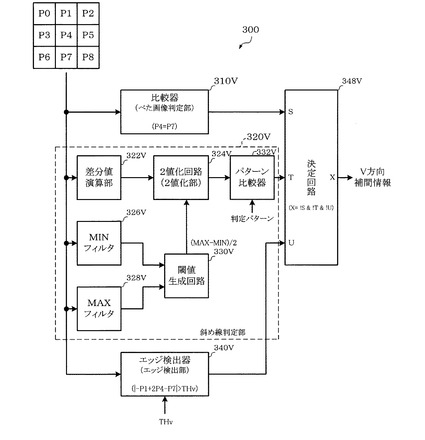
【図26】

【図27】

【図28】
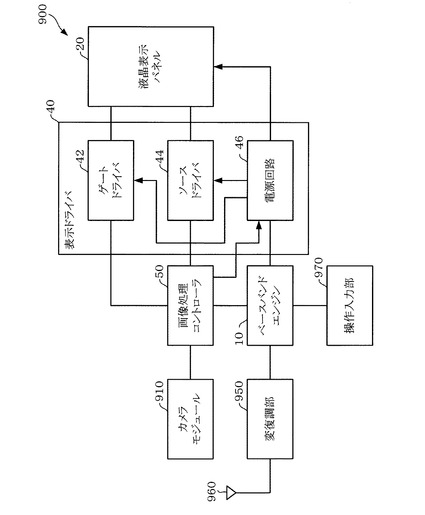
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2008−234426(P2008−234426A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2007−74723(P2007−74723)
【出願日】平成19年3月22日(2007.3.22)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成19年3月22日(2007.3.22)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]