
画像処理方法及び画像処理装置
【課題】着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供する。
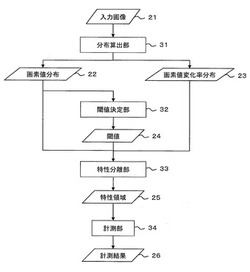
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、顕微鏡等によって得られる物体の画像に対する画像処理方法等に関し、詳細には、物体の計測処理を行うための前処理に関するものである。
【背景技術】
【0002】
従来から、製品の品質評価等を目的として、顕微鏡等によって得られる製品の画像を解析することが行われている。このような画像解析では、画像に2種類以上の特性(物体の材質、物体の面の状態、物体の結晶状態等によって変わる画像の見え方を意味する。)が含まれる場合、特性の分離が必要になる。このような場合、画素毎の輝度値を閾値処理によって2値化することが一般的に行われている。そして、例えば、着目する特性に属する画素を黒、それ以外の特性に属する画素を白とし、黒の割合を計算することによって評価の指標とする。また、単純に2値化するのではなく、特性ごとの輪郭を抽出しておき、輪郭によって区切られた閉曲線の内と外とによって、黒と白に塗り分けることも行われている。
【0003】
例えば、特許文献1には、プラスチック等の被観察物の欠陥(例えば、ゴム、プラスチック絶縁ケーブルの絶縁層の欠陥)を自動的に検出し、検出された欠陥の種類を自動的に判別する欠陥自動判別方法が開示されている。特許文献1に記載の技術では、被観察物1に、光0を透過させて同被観察物1中の欠陥Pを検出し、被観察物1と光電変換器3とを相対的に移動させて欠陥Pに対する焦点方向の観察深度を変え、同観察深度が欠陥Pに合った場合、同欠陥Pより浅い場合、同欠陥Pより深い場合の夫々における透過光輝度を、光学レンズ2により拡大結像された位置に設置されている光電変換器3により電気信号に変換し、同電気信号のうち予め設定されている電気信号強度の範囲Yの外にある部分a、bを欠陥信号c、dとして取り出し(二値化処理し)、取り出された欠陥信号c、dのパターン(黒色か白色か)を予め検出されている各種欠陥の二値化処理されている欠陥パターンと比較して、欠陥の種類を判別するというものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第2737797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、2種類以上の特性が含まれる画像に対して、一定の閾値を境にして黒と白に塗り分けると、着目している特性に該当しない部分も同じ輝度レベルと判定してしまうことがあり、特性の誤検出や検出不能(分離できない。)となる場合がある。輪郭を抽出する場合も同様である。つまり、輝度が変化する部分を画像認識して閉領域を取り出す際、一定の閾値を基準として輪郭の認識を行うと、輪郭の誤検出や検出不能(閉領域を取り出せない。)になる場合がある。いずれの場合も、検出の基準となる閾値が、対象となる画像に対して適切な値ではないことに起因している。
【0006】
そこで、手作業によって特性分離や輪郭抽出を行うことも考えられる。しかしながら、手作業では熟練度に応じて精度が変わってしまう為、一定の評価基準によって製品の品質評価を行うことができない。
【0007】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供することである。
【課題を解決するための手段】
【0008】
前述した目的を達成するために第1の発明は、2種類以上の特性を含む入力画像に対する計測処理を行う画像処理方法であって、前記入力画像の画素値分布及び画素値変化率分布を算出し、前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力し、前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離し、前記特性領域に基づいて前記計測処理を行うことを特徴とする画像処理方法である。第1の発明によって、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことができる。
【0009】
第1の発明では、前記画素値分布に対して前記閾値を用いた輪郭抽出処理を行うことによって、輪郭領域を抽出し、前記輪郭領域内の画素に対して前記画素値変化率分布に基づく絞り込み処理を行うことによって、着目する特性に係る前記特性領域を抽出することが望ましい。これによって、特性領域分離処理の精度が向上する。
【0010】
第1の発明は、例えば、前記画素値分布に基づく値として、前記画素値分布から算出される画素値ヒストグラムの中央値及び最頻値、並びに、前記画素値分布のダイナミックレンジを入力層とするニューラルネットワークによって、前記閾値を出力するものである。これによって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなる。ひいては、実用レベルにおいても有効な評価手法を構築することができる。
【0011】
また、第1の発明では、2次元の画像空間に対して、第1の軸と平行な直線上の前記輪郭領域に属する画素を1つずつ走査していき、各画素の画素値変化率が予め定められた正の値以上の画素については急上昇フラグ、及び各画素の画素値変化率が予め定められた負の値以下の画素については急降下フラグを対応付けておき、更に、前記第1の軸と直交する第2の軸の方向に1画素ずつずらした直線に対しても同様の処理を行い、同一の輪郭領域に属する画素群の中で、前記急上昇フラグが付された画素と前記急降下フラグが付された画素に挟まれる画素群を、前記特性領域として絞り込む。これによって、輪郭領域から精度良く特性領域を抽出することができる。
【0012】
また、第1の発明における前記特性領域は、例えば、銅めっきが施された領域であり、前記計測処理は、前記特性領域の面積の割合を計測する。これによって、例えば、アルミニウムからなる物体の接合部の品質を評価することができる。
【0013】
第2の発明は、2種類以上の特性を含む入力画像に対する計測処理を行う画像処理装置であって、前記画像の画素値分布及び画素値変化率分布を算出する手段と、前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力する手段と、前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離する手段と、前記特性領域に基づいて前記計測処理を行う手段と、を具備することを特徴とする画像処理装置である。第2の発明によって、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことができる。
【発明の効果】
【0014】
本発明により、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供することができる。
【図面の簡単な説明】
【0015】
【図1】入力画像を説明する図
【図2】画像処理装置のハードウエア構成図
【図3】画像処理装置の機能構成図
【図4】輝度値ヒストグラムの1例を示す図
【図5】輝度値ヒストグラムの1例を示す図
【図6】特性分離処理の詳細を示すフローチャート
【図7】特性分離処理を説明する図
【図8】実施例1の入力画像を示す図
【図9】実施例1による分離結果を示す図
【図10】比較例1による分離結果を示す図
【図11】実施例2の入力画像を示す図
【図12】実施例2による分離結果を示す図
【図13】比較例2による分離結果を示す図
【図14】実施例3の入力画像を示す図
【図15】実施例3による分離結果を示す図
【図16】比較例3による分離結果を示す図
【発明を実施するための形態】
【0016】
以下図面に基づいて、本発明の実施形態を詳細に説明する。最初に、図1を参照しながら、本実施形態における画像処理装置が入力し、処理の対象とする画像(以下、「入力画像」という。)について説明する。
【0017】
図1は、入力画像を説明する図である。入力画像は、2種類以上の特性を含む画像である。入力画像は、例えば、走査型電子顕微鏡によって画像化される。走査型電子顕微鏡は、電子線を絞って電子ビームとして対象に照射し、対象物から放出される二次電子、反射電子、透過電子、X線、カソードルミネッセンス(蛍光)、内部器電力等を検出することで対象を観察するものである。
【0018】
本実施形態における入力画像は、例えば、反射電子像を検出することによって画像化されるものである。反射電子像の場合、同じ深度であれば、重い元素は反射能が高いので高信号値(輝度値としては明るい。)となり、軽い元素は反射能が低いので低信号値(輝度値としては暗い。)となる。但し、これらの信号値の違いは、肉眼では判別が難しい。
【0019】
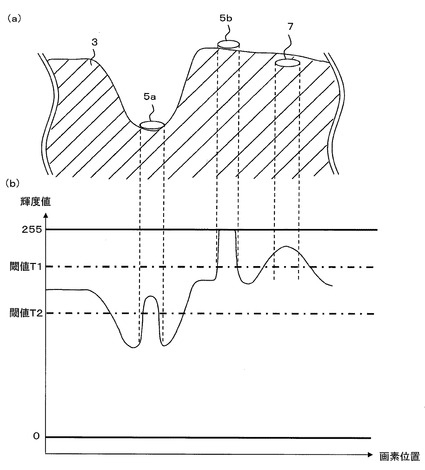
図1(a)は、一部の領域5a、5bに銅めっきが施された、凹凸形状の表面を有するアルミニウムの物体3(図1(a)では、斜線部)を模式的に示した表面の拡大断面図である。領域7は、物体3の内部に不純物として混入している銅を示している。
【0020】
図1(b)は、図1(a)に対応する輝度値分布を示している。図1(b)では、輝度値は0〜255の範囲を取り得る。全体的には、深度が浅いところは高輝度値となり、深度が深いところは低輝度値となっている。また、組成物が銅の領域5a、5b、7では、周辺の領域よりも高輝度値となっている。
【0021】
より詳細に観察すると、銅の領域5aは物体3の凹部に位置する為、凹部よりも深度が浅く、銅めっきが施されていない領域の輝度値よりも、銅の領域5aの輝度値の方が低い値となっている。
【0022】
また、領域5bと領域7を比較すると、深度は同程度であるにも関わらず、輝度値分布の形状が異なる。つまり、領域5bの輝度値分布は、左から右に見ていくと、境界付近の輝度値が急激に上昇し、暫くした後に、急激に下降しているのに対して、領域7の輝度値分布は、境界付近の輝度値がなだらかに上昇し、暫くした後に、なだらかに下降している。これは、領域7では、銅元素が物体3の内部に存在するので、銅元素に起因する反射電子像の散乱がなく、画像のシャープネスが減るためである。
【0023】
本実施形態における画像処理装置は、このような性質を有する入力画像において、図1の例であれば、着目する特性領域を、銅めっきが施された領域5a及び5bとし、それ以外の領域と分離して、着目する特性領域の面積の割合を計測するものである。
【0024】
従来技術のように、画素毎の輝度値を閾値処理によって2値化するだけであれば、銅めっきが施された領域5a及び5bと、それ以外の領域を正確に分離することができない。
【0025】
例えば、図1(b)に示すように、閾値T1によって閾値処理を行うと、閾値T1以上の領域として領域5b及び領域7が抽出され、閾値T1未満の領域として領域5aが抽出されてしまう。つまり、銅めっきが施された領域5a及び5bと、それ以外の領域とを分離できていない。
【0026】
また、例えば、図1(b)に示すように、閾値T2によって閾値処理を行うと、閾値T1以上の領域として領域5a、5b及び領域7に加えて、銅元素を全く含まない領域も抽出されてしまう。つまり、銅めっきが施された領域5a及び5bと、それ以外の領域とを分離できていない。
【0027】
以下に説明するように、本実施形態における画像処理装置では、図1のような場合であっても、銅めっきが施された領域5a及び5bと、それ以外の領域を正確に分離することが可能となる。
【0028】
以下の説明では、入力画像における画素ごとの値として、輝度値と色相値の2種類を考える。但し、両者を区別する必要が無い場合には、輝度値と色相値を総称して、「画素値」と記載する。
【0029】
図2は、画像処理装置のハードウエア構成図である。尚、図2のハードウエア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
【0030】
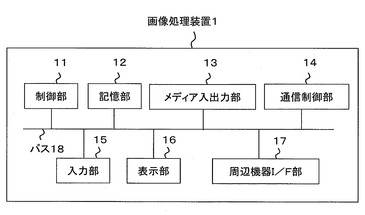
画像処理装置1を実現するコンピュータは、制御部11、記憶部12、メディア入出力部13、通信制御部14、入力部15、表示部16、周辺機器I/F部17等が、バス18を介して接続される。
【0031】
制御部11は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。CPUは、記憶部12、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス18を介して接続された各装置を駆動制御し、画像処理装置1が行う後述する処理を実現する。ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。RAMは、揮発性メモリであり、記憶部12、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部11が各種処理を行う為に使用するワークエリアを備える。
【0032】
記憶部12は、例えば、HDD(Hard Disk Drive)であり、制御部11が実行するプログラム、プログラム実行に必要なデータ、OS(Operating System)等が格納される。プログラムに関しては、OSに相当する制御プログラムや、後述する処理をコンピュータに実行させるためのアプリケーションプログラムが格納されている。これらの各プログラムコードは、制御部11により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0033】
メディア入出力部13(ドライブ装置)は、データの入出力を行い、例えば、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)等のメディア入出力装置を有する。通信制御部14は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク間の通信を媒介する通信インタフェースであり、ネットワークを介して、他のコンピュータ間との通信制御を行う。ネットワークは、有線、無線を問わない。
【0034】
入力部15は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。入力部15を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。表示部16は、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。尚、入力部15及び表示部16は、タッチパネルディスプレイのように、一体となっていても良い。
【0035】
周辺機器I/F(インタフェース)部17は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部17を介してコンピュータは周辺機器(走査型電子顕微鏡等)とのデータの送受信を行う。周辺機器I/F部17は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。バス18は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0036】
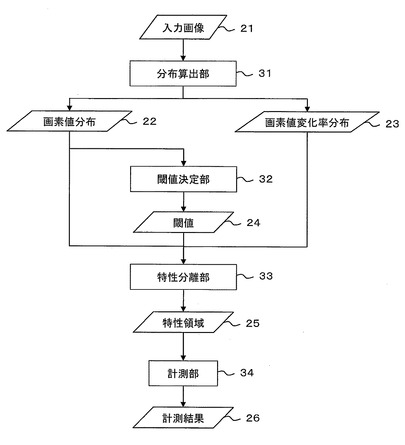
図3は、画像処理装置の機能構成図である。図3に示すように、画像処理装置1は、入力画像21を入力データとし、画素値分布22、画素値変化率分布23、閾値24、及び特性領域25を中間データとし、計測結果26を出力データとして扱う。また、画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。尚、分布算出部31、閾値決定部32、特性分離部33、及び計測部34に含まれる各処理は、画像処理装置1に本発明に係るプログラムがインストールされることによって、画像処理装置1の制御部11が実行するものである。
【0037】
入力画像21は、図1に例示して説明した通り、2種類以上の特性を含む画像である。特に、入力画像21は、走査型電子顕微鏡によって反射電子像が検出され、画像化されたものである。
【0038】
画素値分布22は、入力画像21に含まれる画素群の画素値の分布を示すデータである。分布算出部31は、入力画像21を入力とし、画素値分布22を出力する。画素値分布22の1例としては、入力画像21に含まれる画素群の輝度値ヒストグラムが挙げられる。
【0039】
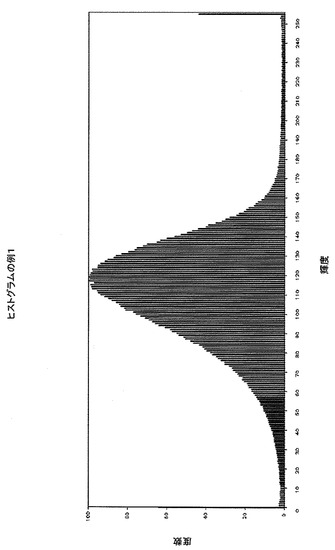
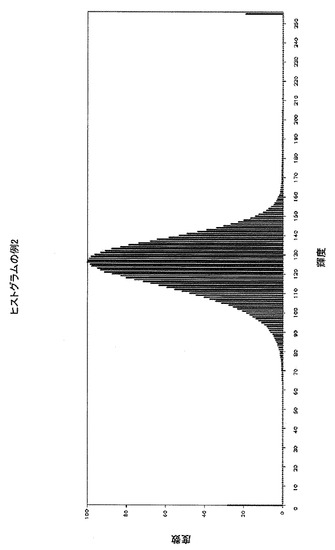
図4及び図5は、それぞれ輝度値ヒストグラムの1例を示す図である。図4及び図5を比較すれば分かるように、本実施形態における画像処理装置1は、輝度値ヒストグラムの分布形状が異なる様々な入力画像21に対して、統一的な手法によって、着目する特性領域25を精度良く抽出する。
【0040】
図3の説明に戻る。画素値変化率分布23は、入力画像21に含まれる画素群の画素値の変化率の分布を示すデータである。分布算出部31は、入力画像21を入力とし、画素値変化率分布23を出力する。画素値変化率分布23の1例としては、画素毎の微分値(1次微分であっても良いし、2次微分等の高次の微分であっても良い。)の分布である。例えば、ユーザが画像の特徴を判断し、画像の特徴に応じて、入力部15を介して、1次微分と2次微分のいずれを用いるかを指示するようにしても良い。また、画像処理装置1が画像の特徴を自動的に判断し、画像の特徴に応じて、1次微分と2次微分のいずれを用いるかを判定するようにしても良い。
【0041】
画像処理技術では、画素毎の微分値を算出するために、公知のフィルタが存在する。そこで、分布算出部31は、微分値を算出するためのフィルタとして、例えば、注目画素とその右隣の画素との差を出力するフィルタ、注目画素とその左隣の画素との差を出力するフィルタ、及び、これら2つのフィルタによって出力される微分値の平均を取るフィルタ等の1次微分フィルタを用いる。また、分布算出部31は、画素毎の微分値として、横方向の差分と縦方向の差分によって定義される画素値の勾配を求めても良い。画素値の勾配の大きさは、(横方向の差分の2乗+縦方向の差分の2乗)の平方根、として定義される。また、分布算出部31は、横方向の1次微分フィルタに限らず、縦方向の1次微分フィルタを用いても良い。また、分布算出部31は、1次微分フィルタに限らず、2次微分フィルタ等の高次微分フィルタを用いても良い。
【0042】
閾値24は、特性分離部33によって特性を分離する際に用いられるデータである。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。
【0043】
ここで、人工知能的アルゴリズムとは、いくつかの指標値を入力し、その指標値に重みを付与し、所定の演算を施して出力値を出力する、という手順をコンピュータに実行させるための処理手順である。人工知能的アルゴリズムの例としては、ニューラルネットワーク、遺伝的アルゴリズム、ファジー理論、セルオートマトン等が挙げられる。
【0044】
より詳しい例について説明する。画像処理装置1は、例えば、画素値分布22に基づく値として、画素値分布22から算出される画素値ヒストグラムの中央値及び最頻値、並びに、画素値分布22のダイナミックレンジを入力層とするニューラルネットワークによって、特性を分離するための閾値を出力する。
【0045】
ダイナミックレンジとは、走査型電子顕微鏡から出力される信号のうち、画素値(本実施形態では0〜255の範囲を取り得る。)の違いとして識別可能な信号の最小値と最大値の比率である。
【0046】
また、ニューラルネットワークとは、人間の脳の学習と識別のメカニズムを模倣したコンピュータアルゴリズムである。例えば、入力層と出力層の2層のネットワークとして構成される「パーセプトロン」、入力層、中間層(中間層は1層でも良いし、複数の層でも良い。)及び出力層のネットワークと教師信号によって構成される「多層ニューラルネットワーク」等が挙げられる。ニューラルネットワーク自体は公知であるため、詳細な説明を省略する。
【0047】
特性領域25は、図1に例示して説明した通り、入力画像21の領域の中で、着目する特性に係る領域を示すデータである。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。特性分離部33の処理の詳細は、図6及び図7を参照しながら後述する。特性分離部33が精度良く特性を分離した場合、図1の例であれば、特性領域25は、銅めっきが施された領域5a及び5bとなる。
【0048】
計測結果26は、所望する計測処理の結果を示すデータである。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。図1の例であれば、計測部34は、着目する特性領域25を銅めっきが施された領域5a及び5bとし、着目する特性領域の面積の割合を計測するものである。これによって、例えば、アルミニウムからなる物体3の接合部の品質を評価することができる。具体的に説明すると、まず、評価対象の接合部を剥がし、接合部に銅めっきを施す。そして、接合部を撮影し、入力画像21とする。そして、本実施の形態における特性分離処理及び計測処理を行うことによって、銅の特性領域の面積の割合を計測する。上手く接合していない箇所は空気に接している為、銅めっきを施しても銅が付着しない。従って、銅の特性領域の面積の割合が高ければ、接合部の品質が高いと判断することができる。但し、計測部34による計測処理は、特に限定されるものではなく、特性領域25に基づいて行われるものであれば、どのような処理であっても良い。
【0049】
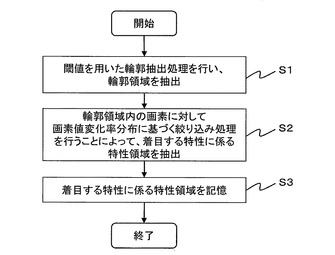
図6は、特性分離処理の詳細を示すフローチャートである。図7は、特性分離処理を説明する図である。以下では、図6に沿って処理の流れを説明し、必要に応じて図7を参照する。
【0050】
図6に示すように、画像処理装置1の制御部11は、閾値24(閾値決定部32によって事前に決定された値)を用いた輪郭抽出処理を行い、輪郭領域を抽出する(ステップS1)。
【0051】
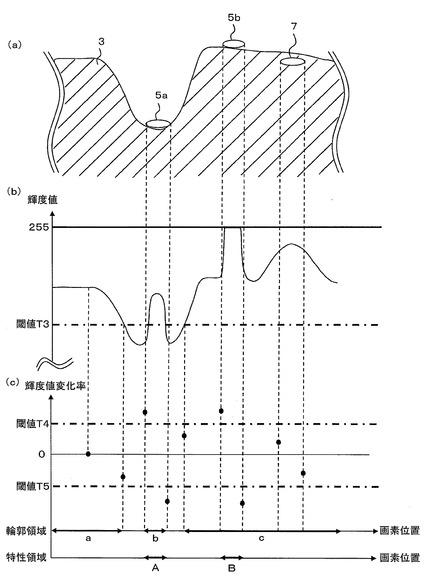
図7(a)は、図1(a)と同様である。図7(b)は、図1(a)の下部を省略するとともに、本実施形態における閾値24に置き換えたものである。図7(b)では、本実施形態における閾値24として、閾値T3が一点鎖線によって図示されている。
【0052】
図7(c)は、図1(a)に対応する輝度値変化率分布23、輪郭領域、及び特性領域25を示している。ステップS1の処理によって、閾値T3以上の領域が輪郭領域として抽出される。
【0053】
図7(c)では、輪郭領域a、b、cが図示されている。輪郭領域aは、銅元素を含まず、アルミニウム元素(物体3の主要組成元素)のみを含む。輪郭領域bは、領域5aを含む領域。輪郭領域cは、領域5b及び領域7を含む。尚、図7では、特定の1走査直線分の画素群の画素値分布しか図示していない。特定の1走査直線分の画素群とは、例えば、画像空間を2次元のXY座標平面としたとき、y座標を固定したx軸と平行な直線上の画素群などである。実際には、画像処理装置1は、他の走査直線に対しても同様の処理を行う。例えば、図7(c)に示す画素値分布が、y座標を固定したx軸と平行な直線上の画素群の画素値分布とすると、この走査直線と直交する方向(=x軸方向)に1画素ずつずらした走査直線に対しても同様の処理を行う。このように、画像処理装置1が、入力画像21に含まれる全走査直線に対して図7(c)に示す処理を行うことによって、入力画像21に対する特性分離処理が完了する。
【0054】
図6の説明に戻る。画像処理装置1の制御部11は、輪郭領域内の画素に対して、画素値変化率分布23に基づく絞り込み処理を行うことによって、着目する特性に係る特性領域25を抽出する(ステップS2)。そして、制御部11は、着目する特性に係る特性領域25を記憶部12に記憶し(ステップS3)、処理を終了する。
【0055】
前述の絞り込み処理について、図7(c)を参照しながら説明する。図7(c)では、各輪郭領域の代表的な画素における輝度値変化率を、黒丸(●)によって模式的に図示している。また、絞り込み処理に用いる閾値T4及びT5(T4>T5)を、それぞれ一点鎖線によって図示している。
【0056】
図7(c)に図示されている輝度値変化率は、注目画素とその左隣の画素との差を出力するフィルタによって算出されたものである。つまり、図7(c)に図示されている輝度値変化率は、注目画素の画素値から、注目画素の左隣の画素の画素値を引いた値である。但し、絞り込み処理において用いられる輝度値変化率は、この例に限定されず、図3を参照しながら説明した通り、様々な例が考えられる。
【0057】
画像処理装置1の制御部11は、各輪郭領域に属する画素を1つずつ走査していき、各画素の画素値変化率が、閾値T4(T4は正の値)以上、又は、閾値T5(T5は負の値)以下であるかを判定する。例えば、制御部11は、画素値変化率がT4以上の画素については、急上昇フラグ、画素値変化率がT5以下の画素については、急降下フラグを対応付けておく。そして、制御部11は、同一の輪郭領域に属する画素群の中で、急上昇フラグが付された画素と急降下フラグが付された画素に挟まれる画素群を、特性領域25として絞り込む。閾値T4及びT5については、例えば、同じ種類の画像(本実施形態であれば、一部の領域5a、5bに銅めっきが施された、凹凸形状の表面を有するアルミニウムの物体3を撮影した画像)に基づき、予め定めておくようにする。閾値T4及びT5を定めた後は、制御部11が自動的に判定処理を行い、特性領域25を絞り込む。
【0058】
図7(c)には、輪郭領域bの全体が、特性領域Aとして抽出されていることが示されている。特性領域Aは、図7(a)における、銅めっきが施された領域5aである。
【0059】
同様に、図7(c)には、輪郭領域cの一部が、特性領域Bとして抽出されていることが示されている。特性領域Bは、図7(a)における、銅めっきが施された領域5bである。
【0060】
そして、図7(c)には、特性領域A及びB以外に、特性領域25として抽出された領域がないことが示されている。つまり、図7(a)における、物体3の内部に不純物として混入している銅元素を含む領域7は、特性領域25として抽出されていない。
【0061】
このように、本実施形態における画像処理装置1は、図1のような場合であっても、銅めっきが施された領域5a及び5bと、それ以外の領域を正確に分離することが可能となる。更に言えば、物体3の内部に不純物として混入している銅元素を含む領域7についても、銅めっきが施された領域5a及び5bと分離することが可能となる。
【0062】
尚、前述の説明では、画像処理装置1は、第1段階として、閾値決定部32によって事前に決定された閾値を用いた輪郭抽出処理を行い、輪郭領域を抽出し、第2段階として、画素値変化率に基づく絞り込み処理を行い、特性領域25を抽出するものとしたが、この例に限定されない。画像処理装置1は、更に、第2段階の処理によって抽出された特性領域25と思われる領域の形状に基づく絞り込み処理を行っても良い。領域の形状に基づく絞り込み処理としては、例えば、領域の面積が閾値以下であること、又は、領域の輪郭上の任意の2点間の最大距離が閾値以下であること、等の条件によって絞り込みを行うことが挙げられる。領域の形状に基づく絞り込み処理によって、物体3の表面に偶然付与された別の物体や傷などを除外することができる。
【0063】
また、前述の説明では、図7(c)に示す閾値T4及びT5(絞り込み処理のための閾値)の決定法について言及していないが、例えば、図7(c)に示す閾値T3(輪郭抽出処理のための閾値)と同様、閾値決定部32が、画素値変化率分布23に基づく値を入力とする人工知能的アルゴリズムによって決定しても良い。
【実施例1】
【0064】
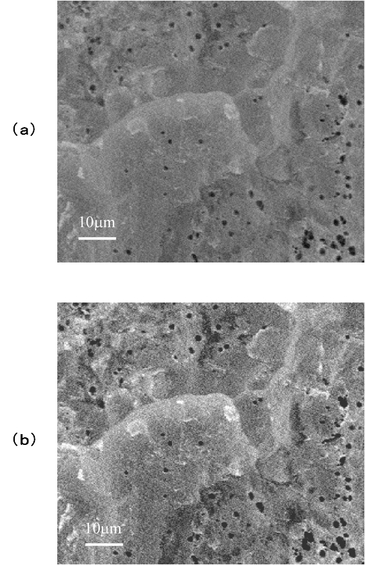
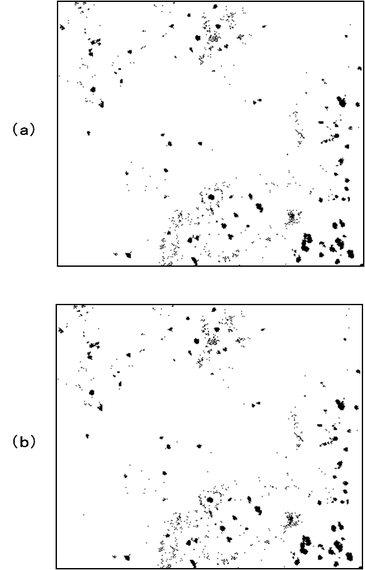
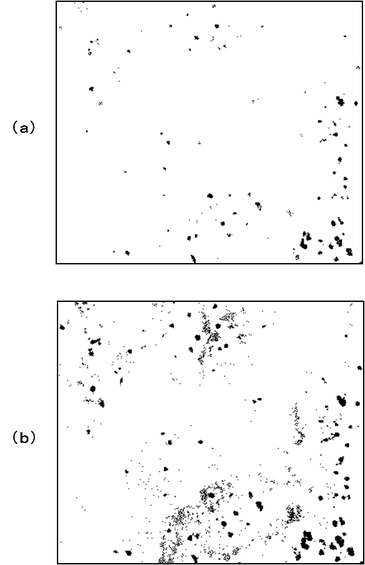
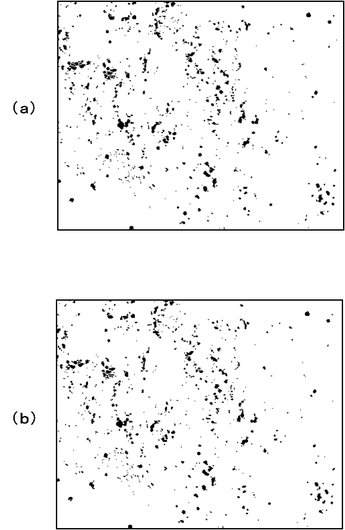
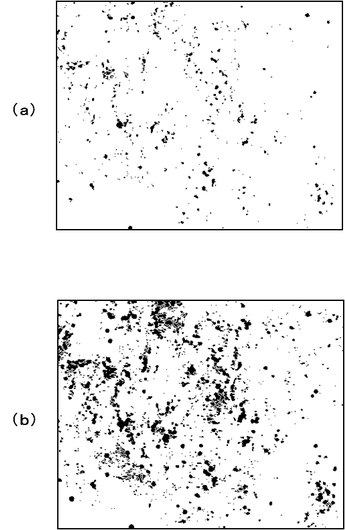
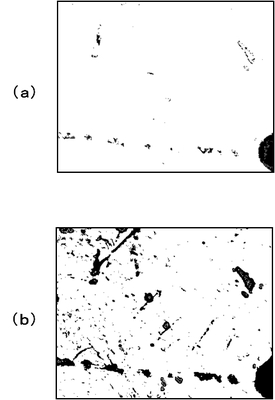
図8〜図10を参照しながら、実施例1について説明する。図8は実施例1の入力画像を示す図、図9は実施例1による分離結果を示す図、図10は比較例1による分離結果を示す図である。
【0065】
実施例1では、走査型電子顕微鏡によって反射電子像を検出することによって得られる画像に対して、特性分離処理を行った。反射電子によるコントラストによって、物体表面の構成元素を分離したいのであるが、従来は、表面の凹凸や観察条件の違いが結果に影響し、正しい評価が得られないといった問題があった。
【0066】
そこで、輝度値分布に基づく値を入力層とするニューラルネットワークによって輪郭抽出処理のための閾値を決定した後、図3に示す特性分離処理を行った。本実施形態における画像処理方法によって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなった。ひいては、実用レベルにおいても有効な評価手法を構築することができた。
【0067】
図8は、倍率が500倍の反射電子像である。図8(a)は加速電圧が5kV、図8(b)は加速電圧が10kVとし、走査型電子顕微鏡によって反射電子像を検出した。観察対象は同じものであるが、観察条件のうち、加速電圧を変えたことになる。
【0068】
一般に、加速電圧を高くすると、S/N比は向上する。しかしながら、表面からの信号に加えて、材料内部からの信号量が増加し、結果としてノイズの増大を招く恐れがある。
【0069】
図9(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素(特性領域に属する画素。以下同様。)の割合が、「2.3%」であった。また、図9(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「2.4%」であった。実施例1では、観察条件を変えた2つの計測結果(着目する特性領域の面積の割合。以下同様。)の比が、許容誤差範囲内となった。
【0070】
比較例1では、実施例1と同じ入力画像に対して、従来手法、すなわち単純に予め定義された輝度値に関する閾値のみを用いる手法によって、特性分離処理を行った。図10(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「1.0%」であった。また、図10(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「3.5%」であった。比較例1では、観察条件を変えた2つの計測結果の誤差が大きく、観察条件等の影響を受けやすいので、実用レベルにおいて使用に耐えないことが分かる。
【実施例2】
【0071】
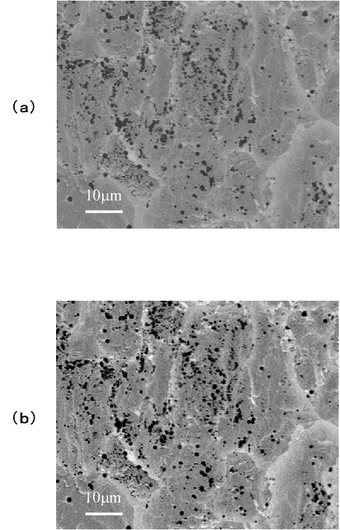
図11〜図13を参照しながら、実施例2について説明する。図11は実施例2の入力画像を示す図、図12は実施例2による分離結果を示す図、図13は比較例2による分離結果を示す図である。
【0072】
実施例2では、走査型電子顕微鏡によって反射電子像を検出することによって得られる画像に対して、特性分離処理を行った。反射電子によるコントラストによって、物体表面の構成元素を分離したいのであるが、前述した通り、従来は、表面の凹凸や観察条件の違いが結果に影響し、正しい評価が得られないといった問題があった。
【0073】
そこで、輝度値分布に基づく値を入力し、遺伝アルゴリズムに適宜最小自乗法を組み合わせることによって輪郭抽出処理のための閾値を決定した後、図3に示す特性分離処理を行った。本実施形態において最小自乗法は必須ではないが、人工知能的アルゴリズムの手法に委ねているデータ処理において簡易的なスクリーニングを達成できる効果がある。すなわち一次のフィルタ効果を有し、無作為状態のデータから遺伝子の組み換えや突然変異等「進化」プロセスを開始するよりも時間効率が格段に向上する。本実施形態における画像処理方法によって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなった。ひいては、実用レベルにおいても有効な評価手法を構築することができた。
【0074】
図11は、倍率が500倍の反射電子像である。図11(a)は加速電圧が5kV、図11(b)は加速電圧が10kVとし、走査型電子顕微鏡によって反射電子像を検出した。観察対象は同じものであるが、観察条件のうち、加速電圧を変えたことになる。
【0075】
前述した通り、一般に、加速電圧を高くすると、S/N比は向上する。しかしながら、表面からの信号に加えて、材料内部からの信号量が増加し、結果としてノイズの増大を招く恐れがある。
【0076】
図12(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「3.7%」であった。また、図12(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「3.4%」であった。実施例2では、観察条件を変えた2つの計測結果の比が、許容誤差範囲内となった。
【0077】
比較例2では、実施例2と同じ入力画像に対して、従来手法、すなわち単純に予め定義された輝度値に関する閾値のみを用いる手法によって、特性分離処理を行った。図13(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「2.2%」であった。また、図13(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「10.0%」であった。比較例2では、観察条件を変えた2つの計測結果の誤差が大きく、観察条件等の影響を受けやすいので、実用レベルにおいて使用に耐えないことが分かる。
【実施例3】
【0078】
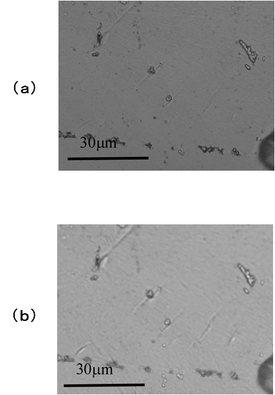
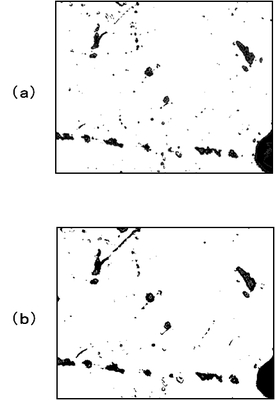
図14〜図16を参照しながら、実施例3について説明する。図14は実施例3の入力画像を示す図、図15は実施例3による分離結果を示す図、図16は比較例3による分離結果を示す図である。尚、図14(a)、図15(a)、及び図16(a)は、元々はカラー画像であったが、特許図面の制約の為、グレースケール画像に変換している。
【0079】
実施例3では、光学顕微鏡によって得られる画像に対して、特性分離処理を行った。光の反射・屈折によるコントラストによって、物体表面の構成要素を分離したいのであるが、前述した通り、従来は、表面の凹凸や観察条件の違いが結果に影響し、正しい評価が得られないといった問題があった。
【0080】
そこで、カラー撮影による画像に対しては色相値分布、モノクロ撮影による画像に対しては画素値分布を入力層とするニューラルネットワークによって輪郭抽出処理のための閾値を決定した後、図3に示す特性分離処理を行った。本実施形態における画像処理方法によって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなった。ひいては、実用レベルにおいても有効な評価手法を構築することができた。
【0081】
図14は、倍率が500倍の反射電子像である。図14(a)はカラー撮影を行い、図14(b)はモノクロ撮影を行った。観察対象は同じものであるが、観察条件のうち、カラー/モノクロの条件を変えたことになる。
【0082】
図15(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素(実施例1及び2と同じく、特性領域に属する画素を黒とした。以下同様。)の割合が、「5.1%」であった。また、図15(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「5.2%」であった。実施例3では、観察条件を変えた2つの計測結果の比が、許容誤差範囲内となった。
【0083】
比較例3では、実施例3と同じ入力画像に対して、従来手法、すなわち単純に予め定義された輝度値に関する閾値のみを用いる手法によって、特性分離処理を行った。図16(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「1.9%」であった。また、図16(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「8.8%」であった。比較例3では、観察条件を変えた2つの計測結果の誤差が大きく、観察条件等の影響を受けやすいので、実用レベルにおいて使用に耐えないことが分かる。
【0084】
以上、添付図面を参照しながら、本発明に係る画像処理方法等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0085】
1………画像処理装置
21………入力画像
22………画素値分布
23………画素値変化率分布
24………閾値
25………特性領域
26………計測結果
31………分布算出部
32………閾値決定部
33………特性分離部
34………計測部
【技術分野】
【0001】
本発明は、顕微鏡等によって得られる物体の画像に対する画像処理方法等に関し、詳細には、物体の計測処理を行うための前処理に関するものである。
【背景技術】
【0002】
従来から、製品の品質評価等を目的として、顕微鏡等によって得られる製品の画像を解析することが行われている。このような画像解析では、画像に2種類以上の特性(物体の材質、物体の面の状態、物体の結晶状態等によって変わる画像の見え方を意味する。)が含まれる場合、特性の分離が必要になる。このような場合、画素毎の輝度値を閾値処理によって2値化することが一般的に行われている。そして、例えば、着目する特性に属する画素を黒、それ以外の特性に属する画素を白とし、黒の割合を計算することによって評価の指標とする。また、単純に2値化するのではなく、特性ごとの輪郭を抽出しておき、輪郭によって区切られた閉曲線の内と外とによって、黒と白に塗り分けることも行われている。
【0003】
例えば、特許文献1には、プラスチック等の被観察物の欠陥(例えば、ゴム、プラスチック絶縁ケーブルの絶縁層の欠陥)を自動的に検出し、検出された欠陥の種類を自動的に判別する欠陥自動判別方法が開示されている。特許文献1に記載の技術では、被観察物1に、光0を透過させて同被観察物1中の欠陥Pを検出し、被観察物1と光電変換器3とを相対的に移動させて欠陥Pに対する焦点方向の観察深度を変え、同観察深度が欠陥Pに合った場合、同欠陥Pより浅い場合、同欠陥Pより深い場合の夫々における透過光輝度を、光学レンズ2により拡大結像された位置に設置されている光電変換器3により電気信号に変換し、同電気信号のうち予め設定されている電気信号強度の範囲Yの外にある部分a、bを欠陥信号c、dとして取り出し(二値化処理し)、取り出された欠陥信号c、dのパターン(黒色か白色か)を予め検出されている各種欠陥の二値化処理されている欠陥パターンと比較して、欠陥の種類を判別するというものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第2737797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、2種類以上の特性が含まれる画像に対して、一定の閾値を境にして黒と白に塗り分けると、着目している特性に該当しない部分も同じ輝度レベルと判定してしまうことがあり、特性の誤検出や検出不能(分離できない。)となる場合がある。輪郭を抽出する場合も同様である。つまり、輝度が変化する部分を画像認識して閉領域を取り出す際、一定の閾値を基準として輪郭の認識を行うと、輪郭の誤検出や検出不能(閉領域を取り出せない。)になる場合がある。いずれの場合も、検出の基準となる閾値が、対象となる画像に対して適切な値ではないことに起因している。
【0006】
そこで、手作業によって特性分離や輪郭抽出を行うことも考えられる。しかしながら、手作業では熟練度に応じて精度が変わってしまう為、一定の評価基準によって製品の品質評価を行うことができない。
【0007】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供することである。
【課題を解決するための手段】
【0008】
前述した目的を達成するために第1の発明は、2種類以上の特性を含む入力画像に対する計測処理を行う画像処理方法であって、前記入力画像の画素値分布及び画素値変化率分布を算出し、前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力し、前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離し、前記特性領域に基づいて前記計測処理を行うことを特徴とする画像処理方法である。第1の発明によって、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことができる。
【0009】
第1の発明では、前記画素値分布に対して前記閾値を用いた輪郭抽出処理を行うことによって、輪郭領域を抽出し、前記輪郭領域内の画素に対して前記画素値変化率分布に基づく絞り込み処理を行うことによって、着目する特性に係る前記特性領域を抽出することが望ましい。これによって、特性領域分離処理の精度が向上する。
【0010】
第1の発明は、例えば、前記画素値分布に基づく値として、前記画素値分布から算出される画素値ヒストグラムの中央値及び最頻値、並びに、前記画素値分布のダイナミックレンジを入力層とするニューラルネットワークによって、前記閾値を出力するものである。これによって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなる。ひいては、実用レベルにおいても有効な評価手法を構築することができる。
【0011】
また、第1の発明では、2次元の画像空間に対して、第1の軸と平行な直線上の前記輪郭領域に属する画素を1つずつ走査していき、各画素の画素値変化率が予め定められた正の値以上の画素については急上昇フラグ、及び各画素の画素値変化率が予め定められた負の値以下の画素については急降下フラグを対応付けておき、更に、前記第1の軸と直交する第2の軸の方向に1画素ずつずらした直線に対しても同様の処理を行い、同一の輪郭領域に属する画素群の中で、前記急上昇フラグが付された画素と前記急降下フラグが付された画素に挟まれる画素群を、前記特性領域として絞り込む。これによって、輪郭領域から精度良く特性領域を抽出することができる。
【0012】
また、第1の発明における前記特性領域は、例えば、銅めっきが施された領域であり、前記計測処理は、前記特性領域の面積の割合を計測する。これによって、例えば、アルミニウムからなる物体の接合部の品質を評価することができる。
【0013】
第2の発明は、2種類以上の特性を含む入力画像に対する計測処理を行う画像処理装置であって、前記画像の画素値分布及び画素値変化率分布を算出する手段と、前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力する手段と、前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離する手段と、前記特性領域に基づいて前記計測処理を行う手段と、を具備することを特徴とする画像処理装置である。第2の発明によって、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことができる。
【発明の効果】
【0014】
本発明により、着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供することができる。
【図面の簡単な説明】
【0015】
【図1】入力画像を説明する図
【図2】画像処理装置のハードウエア構成図
【図3】画像処理装置の機能構成図
【図4】輝度値ヒストグラムの1例を示す図
【図5】輝度値ヒストグラムの1例を示す図
【図6】特性分離処理の詳細を示すフローチャート
【図7】特性分離処理を説明する図
【図8】実施例1の入力画像を示す図
【図9】実施例1による分離結果を示す図
【図10】比較例1による分離結果を示す図
【図11】実施例2の入力画像を示す図
【図12】実施例2による分離結果を示す図
【図13】比較例2による分離結果を示す図
【図14】実施例3の入力画像を示す図
【図15】実施例3による分離結果を示す図
【図16】比較例3による分離結果を示す図
【発明を実施するための形態】
【0016】
以下図面に基づいて、本発明の実施形態を詳細に説明する。最初に、図1を参照しながら、本実施形態における画像処理装置が入力し、処理の対象とする画像(以下、「入力画像」という。)について説明する。
【0017】
図1は、入力画像を説明する図である。入力画像は、2種類以上の特性を含む画像である。入力画像は、例えば、走査型電子顕微鏡によって画像化される。走査型電子顕微鏡は、電子線を絞って電子ビームとして対象に照射し、対象物から放出される二次電子、反射電子、透過電子、X線、カソードルミネッセンス(蛍光)、内部器電力等を検出することで対象を観察するものである。
【0018】
本実施形態における入力画像は、例えば、反射電子像を検出することによって画像化されるものである。反射電子像の場合、同じ深度であれば、重い元素は反射能が高いので高信号値(輝度値としては明るい。)となり、軽い元素は反射能が低いので低信号値(輝度値としては暗い。)となる。但し、これらの信号値の違いは、肉眼では判別が難しい。
【0019】
図1(a)は、一部の領域5a、5bに銅めっきが施された、凹凸形状の表面を有するアルミニウムの物体3(図1(a)では、斜線部)を模式的に示した表面の拡大断面図である。領域7は、物体3の内部に不純物として混入している銅を示している。
【0020】
図1(b)は、図1(a)に対応する輝度値分布を示している。図1(b)では、輝度値は0〜255の範囲を取り得る。全体的には、深度が浅いところは高輝度値となり、深度が深いところは低輝度値となっている。また、組成物が銅の領域5a、5b、7では、周辺の領域よりも高輝度値となっている。
【0021】
より詳細に観察すると、銅の領域5aは物体3の凹部に位置する為、凹部よりも深度が浅く、銅めっきが施されていない領域の輝度値よりも、銅の領域5aの輝度値の方が低い値となっている。
【0022】
また、領域5bと領域7を比較すると、深度は同程度であるにも関わらず、輝度値分布の形状が異なる。つまり、領域5bの輝度値分布は、左から右に見ていくと、境界付近の輝度値が急激に上昇し、暫くした後に、急激に下降しているのに対して、領域7の輝度値分布は、境界付近の輝度値がなだらかに上昇し、暫くした後に、なだらかに下降している。これは、領域7では、銅元素が物体3の内部に存在するので、銅元素に起因する反射電子像の散乱がなく、画像のシャープネスが減るためである。
【0023】
本実施形態における画像処理装置は、このような性質を有する入力画像において、図1の例であれば、着目する特性領域を、銅めっきが施された領域5a及び5bとし、それ以外の領域と分離して、着目する特性領域の面積の割合を計測するものである。
【0024】
従来技術のように、画素毎の輝度値を閾値処理によって2値化するだけであれば、銅めっきが施された領域5a及び5bと、それ以外の領域を正確に分離することができない。
【0025】
例えば、図1(b)に示すように、閾値T1によって閾値処理を行うと、閾値T1以上の領域として領域5b及び領域7が抽出され、閾値T1未満の領域として領域5aが抽出されてしまう。つまり、銅めっきが施された領域5a及び5bと、それ以外の領域とを分離できていない。
【0026】
また、例えば、図1(b)に示すように、閾値T2によって閾値処理を行うと、閾値T1以上の領域として領域5a、5b及び領域7に加えて、銅元素を全く含まない領域も抽出されてしまう。つまり、銅めっきが施された領域5a及び5bと、それ以外の領域とを分離できていない。
【0027】
以下に説明するように、本実施形態における画像処理装置では、図1のような場合であっても、銅めっきが施された領域5a及び5bと、それ以外の領域を正確に分離することが可能となる。
【0028】
以下の説明では、入力画像における画素ごとの値として、輝度値と色相値の2種類を考える。但し、両者を区別する必要が無い場合には、輝度値と色相値を総称して、「画素値」と記載する。
【0029】
図2は、画像処理装置のハードウエア構成図である。尚、図2のハードウエア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
【0030】
画像処理装置1を実現するコンピュータは、制御部11、記憶部12、メディア入出力部13、通信制御部14、入力部15、表示部16、周辺機器I/F部17等が、バス18を介して接続される。
【0031】
制御部11は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。CPUは、記憶部12、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス18を介して接続された各装置を駆動制御し、画像処理装置1が行う後述する処理を実現する。ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。RAMは、揮発性メモリであり、記憶部12、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部11が各種処理を行う為に使用するワークエリアを備える。
【0032】
記憶部12は、例えば、HDD(Hard Disk Drive)であり、制御部11が実行するプログラム、プログラム実行に必要なデータ、OS(Operating System)等が格納される。プログラムに関しては、OSに相当する制御プログラムや、後述する処理をコンピュータに実行させるためのアプリケーションプログラムが格納されている。これらの各プログラムコードは、制御部11により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0033】
メディア入出力部13(ドライブ装置)は、データの入出力を行い、例えば、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)等のメディア入出力装置を有する。通信制御部14は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク間の通信を媒介する通信インタフェースであり、ネットワークを介して、他のコンピュータ間との通信制御を行う。ネットワークは、有線、無線を問わない。
【0034】
入力部15は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。入力部15を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。表示部16は、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。尚、入力部15及び表示部16は、タッチパネルディスプレイのように、一体となっていても良い。
【0035】
周辺機器I/F(インタフェース)部17は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部17を介してコンピュータは周辺機器(走査型電子顕微鏡等)とのデータの送受信を行う。周辺機器I/F部17は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。バス18は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0036】
図3は、画像処理装置の機能構成図である。図3に示すように、画像処理装置1は、入力画像21を入力データとし、画素値分布22、画素値変化率分布23、閾値24、及び特性領域25を中間データとし、計測結果26を出力データとして扱う。また、画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。尚、分布算出部31、閾値決定部32、特性分離部33、及び計測部34に含まれる各処理は、画像処理装置1に本発明に係るプログラムがインストールされることによって、画像処理装置1の制御部11が実行するものである。
【0037】
入力画像21は、図1に例示して説明した通り、2種類以上の特性を含む画像である。特に、入力画像21は、走査型電子顕微鏡によって反射電子像が検出され、画像化されたものである。
【0038】
画素値分布22は、入力画像21に含まれる画素群の画素値の分布を示すデータである。分布算出部31は、入力画像21を入力とし、画素値分布22を出力する。画素値分布22の1例としては、入力画像21に含まれる画素群の輝度値ヒストグラムが挙げられる。
【0039】
図4及び図5は、それぞれ輝度値ヒストグラムの1例を示す図である。図4及び図5を比較すれば分かるように、本実施形態における画像処理装置1は、輝度値ヒストグラムの分布形状が異なる様々な入力画像21に対して、統一的な手法によって、着目する特性領域25を精度良く抽出する。
【0040】
図3の説明に戻る。画素値変化率分布23は、入力画像21に含まれる画素群の画素値の変化率の分布を示すデータである。分布算出部31は、入力画像21を入力とし、画素値変化率分布23を出力する。画素値変化率分布23の1例としては、画素毎の微分値(1次微分であっても良いし、2次微分等の高次の微分であっても良い。)の分布である。例えば、ユーザが画像の特徴を判断し、画像の特徴に応じて、入力部15を介して、1次微分と2次微分のいずれを用いるかを指示するようにしても良い。また、画像処理装置1が画像の特徴を自動的に判断し、画像の特徴に応じて、1次微分と2次微分のいずれを用いるかを判定するようにしても良い。
【0041】
画像処理技術では、画素毎の微分値を算出するために、公知のフィルタが存在する。そこで、分布算出部31は、微分値を算出するためのフィルタとして、例えば、注目画素とその右隣の画素との差を出力するフィルタ、注目画素とその左隣の画素との差を出力するフィルタ、及び、これら2つのフィルタによって出力される微分値の平均を取るフィルタ等の1次微分フィルタを用いる。また、分布算出部31は、画素毎の微分値として、横方向の差分と縦方向の差分によって定義される画素値の勾配を求めても良い。画素値の勾配の大きさは、(横方向の差分の2乗+縦方向の差分の2乗)の平方根、として定義される。また、分布算出部31は、横方向の1次微分フィルタに限らず、縦方向の1次微分フィルタを用いても良い。また、分布算出部31は、1次微分フィルタに限らず、2次微分フィルタ等の高次微分フィルタを用いても良い。
【0042】
閾値24は、特性分離部33によって特性を分離する際に用いられるデータである。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。
【0043】
ここで、人工知能的アルゴリズムとは、いくつかの指標値を入力し、その指標値に重みを付与し、所定の演算を施して出力値を出力する、という手順をコンピュータに実行させるための処理手順である。人工知能的アルゴリズムの例としては、ニューラルネットワーク、遺伝的アルゴリズム、ファジー理論、セルオートマトン等が挙げられる。
【0044】
より詳しい例について説明する。画像処理装置1は、例えば、画素値分布22に基づく値として、画素値分布22から算出される画素値ヒストグラムの中央値及び最頻値、並びに、画素値分布22のダイナミックレンジを入力層とするニューラルネットワークによって、特性を分離するための閾値を出力する。
【0045】
ダイナミックレンジとは、走査型電子顕微鏡から出力される信号のうち、画素値(本実施形態では0〜255の範囲を取り得る。)の違いとして識別可能な信号の最小値と最大値の比率である。
【0046】
また、ニューラルネットワークとは、人間の脳の学習と識別のメカニズムを模倣したコンピュータアルゴリズムである。例えば、入力層と出力層の2層のネットワークとして構成される「パーセプトロン」、入力層、中間層(中間層は1層でも良いし、複数の層でも良い。)及び出力層のネットワークと教師信号によって構成される「多層ニューラルネットワーク」等が挙げられる。ニューラルネットワーク自体は公知であるため、詳細な説明を省略する。
【0047】
特性領域25は、図1に例示して説明した通り、入力画像21の領域の中で、着目する特性に係る領域を示すデータである。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。特性分離部33の処理の詳細は、図6及び図7を参照しながら後述する。特性分離部33が精度良く特性を分離した場合、図1の例であれば、特性領域25は、銅めっきが施された領域5a及び5bとなる。
【0048】
計測結果26は、所望する計測処理の結果を示すデータである。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。図1の例であれば、計測部34は、着目する特性領域25を銅めっきが施された領域5a及び5bとし、着目する特性領域の面積の割合を計測するものである。これによって、例えば、アルミニウムからなる物体3の接合部の品質を評価することができる。具体的に説明すると、まず、評価対象の接合部を剥がし、接合部に銅めっきを施す。そして、接合部を撮影し、入力画像21とする。そして、本実施の形態における特性分離処理及び計測処理を行うことによって、銅の特性領域の面積の割合を計測する。上手く接合していない箇所は空気に接している為、銅めっきを施しても銅が付着しない。従って、銅の特性領域の面積の割合が高ければ、接合部の品質が高いと判断することができる。但し、計測部34による計測処理は、特に限定されるものではなく、特性領域25に基づいて行われるものであれば、どのような処理であっても良い。
【0049】
図6は、特性分離処理の詳細を示すフローチャートである。図7は、特性分離処理を説明する図である。以下では、図6に沿って処理の流れを説明し、必要に応じて図7を参照する。
【0050】
図6に示すように、画像処理装置1の制御部11は、閾値24(閾値決定部32によって事前に決定された値)を用いた輪郭抽出処理を行い、輪郭領域を抽出する(ステップS1)。
【0051】
図7(a)は、図1(a)と同様である。図7(b)は、図1(a)の下部を省略するとともに、本実施形態における閾値24に置き換えたものである。図7(b)では、本実施形態における閾値24として、閾値T3が一点鎖線によって図示されている。
【0052】
図7(c)は、図1(a)に対応する輝度値変化率分布23、輪郭領域、及び特性領域25を示している。ステップS1の処理によって、閾値T3以上の領域が輪郭領域として抽出される。
【0053】
図7(c)では、輪郭領域a、b、cが図示されている。輪郭領域aは、銅元素を含まず、アルミニウム元素(物体3の主要組成元素)のみを含む。輪郭領域bは、領域5aを含む領域。輪郭領域cは、領域5b及び領域7を含む。尚、図7では、特定の1走査直線分の画素群の画素値分布しか図示していない。特定の1走査直線分の画素群とは、例えば、画像空間を2次元のXY座標平面としたとき、y座標を固定したx軸と平行な直線上の画素群などである。実際には、画像処理装置1は、他の走査直線に対しても同様の処理を行う。例えば、図7(c)に示す画素値分布が、y座標を固定したx軸と平行な直線上の画素群の画素値分布とすると、この走査直線と直交する方向(=x軸方向)に1画素ずつずらした走査直線に対しても同様の処理を行う。このように、画像処理装置1が、入力画像21に含まれる全走査直線に対して図7(c)に示す処理を行うことによって、入力画像21に対する特性分離処理が完了する。
【0054】
図6の説明に戻る。画像処理装置1の制御部11は、輪郭領域内の画素に対して、画素値変化率分布23に基づく絞り込み処理を行うことによって、着目する特性に係る特性領域25を抽出する(ステップS2)。そして、制御部11は、着目する特性に係る特性領域25を記憶部12に記憶し(ステップS3)、処理を終了する。
【0055】
前述の絞り込み処理について、図7(c)を参照しながら説明する。図7(c)では、各輪郭領域の代表的な画素における輝度値変化率を、黒丸(●)によって模式的に図示している。また、絞り込み処理に用いる閾値T4及びT5(T4>T5)を、それぞれ一点鎖線によって図示している。
【0056】
図7(c)に図示されている輝度値変化率は、注目画素とその左隣の画素との差を出力するフィルタによって算出されたものである。つまり、図7(c)に図示されている輝度値変化率は、注目画素の画素値から、注目画素の左隣の画素の画素値を引いた値である。但し、絞り込み処理において用いられる輝度値変化率は、この例に限定されず、図3を参照しながら説明した通り、様々な例が考えられる。
【0057】
画像処理装置1の制御部11は、各輪郭領域に属する画素を1つずつ走査していき、各画素の画素値変化率が、閾値T4(T4は正の値)以上、又は、閾値T5(T5は負の値)以下であるかを判定する。例えば、制御部11は、画素値変化率がT4以上の画素については、急上昇フラグ、画素値変化率がT5以下の画素については、急降下フラグを対応付けておく。そして、制御部11は、同一の輪郭領域に属する画素群の中で、急上昇フラグが付された画素と急降下フラグが付された画素に挟まれる画素群を、特性領域25として絞り込む。閾値T4及びT5については、例えば、同じ種類の画像(本実施形態であれば、一部の領域5a、5bに銅めっきが施された、凹凸形状の表面を有するアルミニウムの物体3を撮影した画像)に基づき、予め定めておくようにする。閾値T4及びT5を定めた後は、制御部11が自動的に判定処理を行い、特性領域25を絞り込む。
【0058】
図7(c)には、輪郭領域bの全体が、特性領域Aとして抽出されていることが示されている。特性領域Aは、図7(a)における、銅めっきが施された領域5aである。
【0059】
同様に、図7(c)には、輪郭領域cの一部が、特性領域Bとして抽出されていることが示されている。特性領域Bは、図7(a)における、銅めっきが施された領域5bである。
【0060】
そして、図7(c)には、特性領域A及びB以外に、特性領域25として抽出された領域がないことが示されている。つまり、図7(a)における、物体3の内部に不純物として混入している銅元素を含む領域7は、特性領域25として抽出されていない。
【0061】
このように、本実施形態における画像処理装置1は、図1のような場合であっても、銅めっきが施された領域5a及び5bと、それ以外の領域を正確に分離することが可能となる。更に言えば、物体3の内部に不純物として混入している銅元素を含む領域7についても、銅めっきが施された領域5a及び5bと分離することが可能となる。
【0062】
尚、前述の説明では、画像処理装置1は、第1段階として、閾値決定部32によって事前に決定された閾値を用いた輪郭抽出処理を行い、輪郭領域を抽出し、第2段階として、画素値変化率に基づく絞り込み処理を行い、特性領域25を抽出するものとしたが、この例に限定されない。画像処理装置1は、更に、第2段階の処理によって抽出された特性領域25と思われる領域の形状に基づく絞り込み処理を行っても良い。領域の形状に基づく絞り込み処理としては、例えば、領域の面積が閾値以下であること、又は、領域の輪郭上の任意の2点間の最大距離が閾値以下であること、等の条件によって絞り込みを行うことが挙げられる。領域の形状に基づく絞り込み処理によって、物体3の表面に偶然付与された別の物体や傷などを除外することができる。
【0063】
また、前述の説明では、図7(c)に示す閾値T4及びT5(絞り込み処理のための閾値)の決定法について言及していないが、例えば、図7(c)に示す閾値T3(輪郭抽出処理のための閾値)と同様、閾値決定部32が、画素値変化率分布23に基づく値を入力とする人工知能的アルゴリズムによって決定しても良い。
【実施例1】
【0064】
図8〜図10を参照しながら、実施例1について説明する。図8は実施例1の入力画像を示す図、図9は実施例1による分離結果を示す図、図10は比較例1による分離結果を示す図である。
【0065】
実施例1では、走査型電子顕微鏡によって反射電子像を検出することによって得られる画像に対して、特性分離処理を行った。反射電子によるコントラストによって、物体表面の構成元素を分離したいのであるが、従来は、表面の凹凸や観察条件の違いが結果に影響し、正しい評価が得られないといった問題があった。
【0066】
そこで、輝度値分布に基づく値を入力層とするニューラルネットワークによって輪郭抽出処理のための閾値を決定した後、図3に示す特性分離処理を行った。本実施形態における画像処理方法によって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなった。ひいては、実用レベルにおいても有効な評価手法を構築することができた。
【0067】
図8は、倍率が500倍の反射電子像である。図8(a)は加速電圧が5kV、図8(b)は加速電圧が10kVとし、走査型電子顕微鏡によって反射電子像を検出した。観察対象は同じものであるが、観察条件のうち、加速電圧を変えたことになる。
【0068】
一般に、加速電圧を高くすると、S/N比は向上する。しかしながら、表面からの信号に加えて、材料内部からの信号量が増加し、結果としてノイズの増大を招く恐れがある。
【0069】
図9(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素(特性領域に属する画素。以下同様。)の割合が、「2.3%」であった。また、図9(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「2.4%」であった。実施例1では、観察条件を変えた2つの計測結果(着目する特性領域の面積の割合。以下同様。)の比が、許容誤差範囲内となった。
【0070】
比較例1では、実施例1と同じ入力画像に対して、従来手法、すなわち単純に予め定義された輝度値に関する閾値のみを用いる手法によって、特性分離処理を行った。図10(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「1.0%」であった。また、図10(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「3.5%」であった。比較例1では、観察条件を変えた2つの計測結果の誤差が大きく、観察条件等の影響を受けやすいので、実用レベルにおいて使用に耐えないことが分かる。
【実施例2】
【0071】
図11〜図13を参照しながら、実施例2について説明する。図11は実施例2の入力画像を示す図、図12は実施例2による分離結果を示す図、図13は比較例2による分離結果を示す図である。
【0072】
実施例2では、走査型電子顕微鏡によって反射電子像を検出することによって得られる画像に対して、特性分離処理を行った。反射電子によるコントラストによって、物体表面の構成元素を分離したいのであるが、前述した通り、従来は、表面の凹凸や観察条件の違いが結果に影響し、正しい評価が得られないといった問題があった。
【0073】
そこで、輝度値分布に基づく値を入力し、遺伝アルゴリズムに適宜最小自乗法を組み合わせることによって輪郭抽出処理のための閾値を決定した後、図3に示す特性分離処理を行った。本実施形態において最小自乗法は必須ではないが、人工知能的アルゴリズムの手法に委ねているデータ処理において簡易的なスクリーニングを達成できる効果がある。すなわち一次のフィルタ効果を有し、無作為状態のデータから遺伝子の組み換えや突然変異等「進化」プロセスを開始するよりも時間効率が格段に向上する。本実施形態における画像処理方法によって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなった。ひいては、実用レベルにおいても有効な評価手法を構築することができた。
【0074】
図11は、倍率が500倍の反射電子像である。図11(a)は加速電圧が5kV、図11(b)は加速電圧が10kVとし、走査型電子顕微鏡によって反射電子像を検出した。観察対象は同じものであるが、観察条件のうち、加速電圧を変えたことになる。
【0075】
前述した通り、一般に、加速電圧を高くすると、S/N比は向上する。しかしながら、表面からの信号に加えて、材料内部からの信号量が増加し、結果としてノイズの増大を招く恐れがある。
【0076】
図12(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「3.7%」であった。また、図12(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「3.4%」であった。実施例2では、観察条件を変えた2つの計測結果の比が、許容誤差範囲内となった。
【0077】
比較例2では、実施例2と同じ入力画像に対して、従来手法、すなわち単純に予め定義された輝度値に関する閾値のみを用いる手法によって、特性分離処理を行った。図13(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「2.2%」であった。また、図13(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「10.0%」であった。比較例2では、観察条件を変えた2つの計測結果の誤差が大きく、観察条件等の影響を受けやすいので、実用レベルにおいて使用に耐えないことが分かる。
【実施例3】
【0078】
図14〜図16を参照しながら、実施例3について説明する。図14は実施例3の入力画像を示す図、図15は実施例3による分離結果を示す図、図16は比較例3による分離結果を示す図である。尚、図14(a)、図15(a)、及び図16(a)は、元々はカラー画像であったが、特許図面の制約の為、グレースケール画像に変換している。
【0079】
実施例3では、光学顕微鏡によって得られる画像に対して、特性分離処理を行った。光の反射・屈折によるコントラストによって、物体表面の構成要素を分離したいのであるが、前述した通り、従来は、表面の凹凸や観察条件の違いが結果に影響し、正しい評価が得られないといった問題があった。
【0080】
そこで、カラー撮影による画像に対しては色相値分布、モノクロ撮影による画像に対しては画素値分布を入力層とするニューラルネットワークによって輪郭抽出処理のための閾値を決定した後、図3に示す特性分離処理を行った。本実施形態における画像処理方法によって、判定基準が標準化されると共に、観察対象の表面の凹凸や観察条件による影響を受けにくくなった。ひいては、実用レベルにおいても有効な評価手法を構築することができた。
【0081】
図14は、倍率が500倍の反射電子像である。図14(a)はカラー撮影を行い、図14(b)はモノクロ撮影を行った。観察対象は同じものであるが、観察条件のうち、カラー/モノクロの条件を変えたことになる。
【0082】
図15(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素(実施例1及び2と同じく、特性領域に属する画素を黒とした。以下同様。)の割合が、「5.1%」であった。また、図15(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「5.2%」であった。実施例3では、観察条件を変えた2つの計測結果の比が、許容誤差範囲内となった。
【0083】
比較例3では、実施例3と同じ入力画像に対して、従来手法、すなわち単純に予め定義された輝度値に関する閾値のみを用いる手法によって、特性分離処理を行った。図16(a)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「1.9%」であった。また、図16(b)に示す分離結果では、入力画像の全体領域に対する、黒の画素の割合が、「8.8%」であった。比較例3では、観察条件を変えた2つの計測結果の誤差が大きく、観察条件等の影響を受けやすいので、実用レベルにおいて使用に耐えないことが分かる。
【0084】
以上、添付図面を参照しながら、本発明に係る画像処理方法等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0085】
1………画像処理装置
21………入力画像
22………画素値分布
23………画素値変化率分布
24………閾値
25………特性領域
26………計測結果
31………分布算出部
32………閾値決定部
33………特性分離部
34………計測部
【特許請求の範囲】
【請求項1】
2種類以上の特性を含む入力画像に対する計測処理を行う画像処理方法であって、
前記入力画像の画素値分布及び画素値変化率分布を算出し、
前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力し、
前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離し、
前記特性領域に基づいて前記計測処理を行う
ことを特徴とする画像処理方法。
【請求項2】
前記画素値分布に対して前記閾値を用いた輪郭抽出処理を行うことによって、輪郭領域を抽出し、
前記輪郭領域内の画素に対して前記画素値変化率分布に基づく絞り込み処理を行うことによって、着目する特性に係る前記特性領域を抽出する
ことを特徴とする請求項1に記載の画像処理方法。
【請求項3】
前記画素値分布に基づく値として、前記画素値分布から算出される画素値ヒストグラムの中央値及び最頻値、並びに、前記画素値分布のダイナミックレンジを入力層とするニューラルネットワークによって、前記閾値を出力する
ことを特徴とする請求項1又は請求項2に記載の画像処理方法。
【請求項4】
2次元の画像空間に対して、第1の軸と平行な直線上の前記輪郭領域に属する画素を1つずつ走査していき、各画素の画素値変化率が予め定められた正の値以上の画素については急上昇フラグ、及び各画素の画素値変化率が予め定められた負の値以下の画素については急降下フラグを対応付けておき、更に、前記第1の軸と直交する第2の軸の方向に1画素ずつずらした直線に対しても同様の処理を行い、同一の輪郭領域に属する画素群の中で、前記急上昇フラグが付された画素と前記急降下フラグが付された画素に挟まれる画素群を、前記特性領域として絞り込む
ことを特徴とする請求項2に記載の画像処理方法。
【請求項5】
前記特性領域は、銅めっきが施された領域であり、
前記計測処理は、前記特性領域の面積の割合を計測する
ことを特徴とする請求項1から請求項4のいずれかに記載の画像処理方法。
【請求項6】
2種類以上の特性を含む入力画像に対する計測処理を行う画像処理装置であって、
前記画像の画素値分布及び画素値変化率分布を算出する手段と、
前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力する手段と、
前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離する手段と、
前記特性領域に基づいて前記計測処理を行う手段と、
を具備することを特徴とする画像処理装置。
【請求項1】
2種類以上の特性を含む入力画像に対する計測処理を行う画像処理方法であって、
前記入力画像の画素値分布及び画素値変化率分布を算出し、
前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力し、
前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離し、
前記特性領域に基づいて前記計測処理を行う
ことを特徴とする画像処理方法。
【請求項2】
前記画素値分布に対して前記閾値を用いた輪郭抽出処理を行うことによって、輪郭領域を抽出し、
前記輪郭領域内の画素に対して前記画素値変化率分布に基づく絞り込み処理を行うことによって、着目する特性に係る前記特性領域を抽出する
ことを特徴とする請求項1に記載の画像処理方法。
【請求項3】
前記画素値分布に基づく値として、前記画素値分布から算出される画素値ヒストグラムの中央値及び最頻値、並びに、前記画素値分布のダイナミックレンジを入力層とするニューラルネットワークによって、前記閾値を出力する
ことを特徴とする請求項1又は請求項2に記載の画像処理方法。
【請求項4】
2次元の画像空間に対して、第1の軸と平行な直線上の前記輪郭領域に属する画素を1つずつ走査していき、各画素の画素値変化率が予め定められた正の値以上の画素については急上昇フラグ、及び各画素の画素値変化率が予め定められた負の値以下の画素については急降下フラグを対応付けておき、更に、前記第1の軸と直交する第2の軸の方向に1画素ずつずらした直線に対しても同様の処理を行い、同一の輪郭領域に属する画素群の中で、前記急上昇フラグが付された画素と前記急降下フラグが付された画素に挟まれる画素群を、前記特性領域として絞り込む
ことを特徴とする請求項2に記載の画像処理方法。
【請求項5】
前記特性領域は、銅めっきが施された領域であり、
前記計測処理は、前記特性領域の面積の割合を計測する
ことを特徴とする請求項1から請求項4のいずれかに記載の画像処理方法。
【請求項6】
2種類以上の特性を含む入力画像に対する計測処理を行う画像処理装置であって、
前記画像の画素値分布及び画素値変化率分布を算出する手段と、
前記画素値分布に基づく値を入力とする人工知能的アルゴリズムによって、前記特性を分離するための閾値を出力する手段と、
前記画素値分布、前記画素値変化率分布及び前記閾値を用いて、前記入力画像の領域を前記特性ごとの特性領域に分離する手段と、
前記特性領域に基づいて前記計測処理を行う手段と、
を具備することを特徴とする画像処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−77139(P2013−77139A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−216265(P2011−216265)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000005290)古河電気工業株式会社 (4,457)
【出願人】(391045897)古河AS株式会社 (571)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000005290)古河電気工業株式会社 (4,457)
【出願人】(391045897)古河AS株式会社 (571)
【Fターム(参考)】
[ Back to top ]