
画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるプログラム
【課題】複数の焦点領域を設定する場合に、自然な遠近感が表現された画像を生成する。
【解決手段】焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する。奥行き取得部が、被写体までの奥行きを画像内の画素に対応付けて取得する。ぼかし処理部が、画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの焦点領域に対応する奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行する。
【解決手段】焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する。奥行き取得部が、被写体までの奥行きを画像内の画素に対応付けて取得する。ぼかし処理部が、画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの焦点領域に対応する奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるプログラムに関する。詳しくは、ぼかし処理を実行する画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
近年、撮影対象までの奥行きを測定することができる撮像装置が普及しつつある。奥行きの測定方法としてはDFD(Depth from Defocus)法やステレオマッチング法などがある。DFD法は、画像内の被写体のボケ具合を解析して、ボケ具合と奥行きとの関係に基づいて、その被写体までの奥行きを測定する方法である。ステレオマッチング法は、基準画像および参照画像から視差を検出し、視差と奥行きとの関係に基づいて奥行きを測定する方法である。
【0003】
これらの方法を使用して撮像装置から被写体までの奥行きを測定し、主たる被写体に焦点が合った状態のままで、その被写体の背景において、奥行きに応じた度合いのぼかし処理を施す撮像装置が提案されている(例えば、特許文献1参照。)。奥行きに応じた度合いのぼかし処理により、遠近感が強調された画像が生成される。このようなぼかし処理は、例えば、ポートレート写真の背景において、人物を引き立てる目的で施されることが多い。また、受光面積の小さい撮像素子を備えた撮像装置においては、その撮像素子の特性上、比較的ボケの少ない画像が撮像されるため、遠近感を強調する目的で、このようなぼかし処理がよく用いられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−37767号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述の従来技術では、ぼかし処理において焦点が合った状態を維持すべき領域(以下、「焦点領域」と称する。)を2つ以上設定する場合に、自然な遠近感を表現することができない場合があった。例えば、手前の被写体と、その被写体より奥に位置する被写体との2つの領域を焦点領域に設定し、残りの背景をぼかす場合を想定する。手前の被写体を基準として、手前の被写体からの奥行き方向の距離に応じて背景をぼかすと、ぼかしていない奥の被写体とぼかした背景との間の境界が不自然となってしまう。一方、奥の被写体を基準とした距離に応じて背景をぼかすと、ぼかしていない手前の被写体とぼかした背景との間の境界が不自然となってしまう。このように、複数の焦点領域を設定した場合に、自然な遠近感を表現することができないおそれがあった。
【0006】
本技術はこのような状況に鑑みて生み出されたものであり、複数の焦点領域を設定する場合に、自然な遠近感が表現された画像を生成する技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
本技術は、上述の問題点を解消するためになされたものであり、その第1の側面は、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定部と、上記被写体までの奥行きを上記画像内の画素に対応付けて取得する奥行き取得部と、上記画像内のそれぞれの画素を対象画素として当該対象画素に対応する上記奥行きとそれぞれの上記焦点領域に対応する上記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を上記対象画素に対して実行するぼかし処理部とを具備する画像処理装置、および、その制御方法ならびに当該方法をコンピュータに実行させるためのプログラムである。これにより、対象画素に対応する奥行きと複数の焦点領域のそれぞれに対応する奥行きとの差分の絶対値のうちの最小値に応じた度合いのぼかし処理が、その対象画素に対して実行されるという作用をもたらす。
【0008】
また、この第1の側面において、上記焦点領域設定部は、上記画像において上記焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出する候補領域抽出部と、上記抽出された候補領域の中から複数の上記候補領域を選択して上記焦点領域として設定する候補領域選択部とを備えてもよい。これにより、抽出された候補領域の中から選択された複数の候補領域が焦点領域として設定されるという作用をもたらす。
【0009】
また、この第1の側面において、上記候補領域抽出部は、上記画像において所定の物体が撮像された領域を認識して上記候補領域として抽出することもできる。これにより、物体が撮像された領域が候補領域として抽出されるという作用をもたらす。
【0010】
また、この第1の側面において、上記候補領域抽出部は、上記画像において顔が撮像された領域を認識して上記候補領域として抽出することもできる。これにより、顔が撮像された領域が候補領域として抽出されるという作用をもたらす。
【0011】
また、この第1の側面において、上記候補領域抽出部は、上記画像において被写体の配置を定義する構図を決定する構図決定部と、上記決定された構図に基づいて複数の領域を上記候補領域として抽出する候補領域抽出処理部とを備えてもよい。これにより、決定された構図に基づいて候補領域が抽出されるという作用をもたらす。
【0012】
また、この第1の側面において、上記焦点領域設定部は、上記候補領域の選択における優先度を上記抽出された候補領域に設定する優先度設定部をさらに備え、上記候補領域選択部は、上記設定された優先度に基づいて上記候補領域を選択することもできる。これにより、設定された優先度に基づいて候補領域が選択されるという作用をもたらす。
【0013】
また、この第1の側面において、上記優先度設定部は、所定の被写体が撮像された画像を登録しておき当該登録しておいた画像と上記候補領域との間の類似性に基づいて上記優先度を上記候補領域に設定することもできる。これにより、登録された画像と候補領域との類似性に基づいて優先度が設定されるという作用をもたらす。
【0014】
また、この第1の側面において、上記優先度設定部は、上記候補領域の面積に基づいて上記優先度を設定することもできる。これにより、候補領域の面積に基づいて優先度が設定されるという作用をもたらす。
【0015】
また、この第1の側面において、上記優先度設定部は、上記候補領域内のいずれかの画素に対応する上記奥行きに基づいて上記優先度を設定することもできる。これにより、候補領域内のいずれかの画素に対応する奥行きに基づいて優先度が設定されるという作用をもたらす。
【0016】
また、この第1の側面において、上記奥行き設定部は、上記取得された奥行きのうちの最小または最大の値に対して上記候補領域内のいずれかの画素に対応する上記奥行きが近いほどその候補領域に対して高い優先度を設定することもできる。これにより、奥行きの最大または最小の値に対して、候補領域の奥行きが近いほど、その候補領域に高い優先度が設定されるという作用をもたらす。
【0017】
また、この第1の側面において、上記画像は、上記奥行きの取得において基準とされる基準画像と参照される参照画像とを含み、上記奥行き取得部は、上記基準画像内のいずれかの上記画素と当該画素に対応する上記参照画像内の上記画素との間の距離を視差として検出する視差検出部と、上記検出された視差に基づいて上記基準画像内の上記画素に対応付けて上記奥行きを生成する奥行き生成部とを備え、上記ぼかし処理部は、上記基準画像内のそれぞれの画素を上記対象画素として上記ぼかし処理を実行することもできる。これにより、検出された視差に基づいて奥行きが生成されるという作用をもたらす。
【0018】
また、この第1の側面において、上記ぼかし処理部は、上記ぼかし処理の度合いをδjとし、上記画像を撮像した撮像装置のレンズの有効口径をDとし、上記対象画素に対応する上記奥行きをdjとし、上記最小値をΔdj_minとし、上記画像の撮像倍率をRとして、次式
δj=D×Δdj_min×R/dj
を使用して算出した度合いのぼかし処理を上記対象画素に対して実行することもできる。これにより、ぼかし処理の度合いが上式から算出されるという作用をもたらす。
【0019】
また、この第1の側面において、上記焦点領域設定部は、上記焦点領域を指定する操作信号に従って上記焦点領域を設定することもできる。これにより、操作信号に従って焦点領域が設定されるという作用をもたらす。
【0020】
また、この第1の側面において、上記焦点領域設定部は、設定する上記焦点領域の個数を閾値以下に制限して上記焦点領域を設定することもできる。これにより、設定する上記焦点領域の個数を閾値以下に制限されるという作用をもたらす。
【発明の効果】
【0021】
本技術によれば、複数の焦点領域を設定する場合に、自然な遠近感が表現された画像を生成することができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0022】
【図1】第1の実施の形態における撮像装置の一構成例を示すブロック図である。
【図2】第1の実施の形態における画像データおよび奥行き情報の一例を示す図である。
【図3】第1の実施の形態における焦点領域の設定方法の一例を説明するための図である。
【図4】第1の実施の形態における奥行き情報、奥行き、および、奥行差分絶対値の一例を示す図である。
【図5】第1の実施の形態における画像処理装置の一構成例を示すブロック図である。
【図6】第1の実施の形態における奥行差分絶対値の一例を示す図である。
【図7】第1の実施の形態におけるフィルタ次数の一例を示す図である。
【図8】第1の実施の形態におけるぼかし処理後の画像データの一例を示す図である。
【図9】第1の実施の形態における画像処理装置の動作の一例を示すフローチャートである。
【図10】第1の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【図11】第1の実施の形態におけるぼかし処理の一例を示すフローチャートである。
【図12】第2の実施の形態における撮像装置の一構成例を示すブロック図である。
【図13】第2の実施の形態における画像処理装置の一構成例を示すブロック図である。
【図14】第2の実施の形態における奥行き情報取得部の一構成例を示すブロック図である。
【図15】第2の実施の形態における視差と奥行きとの関係を示す図である。
【図16】第2の実施の形態における画像処理装置の動作の一例を示すフローチャートである
【図17】第3の実施の形態における焦点領域設定部の一構成例を示すブロック図である。
【図18】第3の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【図19】第4の実施の形態における焦点領域設定部の一構成例を示すブロック図である。
【図20】第4の実施の形態におけるぼかし処理の前後の画像データの一例を示す図である。
【図21】第4の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【図22】第5の実施の形態における焦点領域設定部の一構成例を示すブロック図である。
【図23】第5の実施の形態における、三分割構図を設定した場合のぼかし処理の前後の画像データおよび焦点領域情報の一例である。
【図24】第5の実施の形態における、パターン構図を設定した場合のぼかし処理の前後の画像データの一例である。
【図25】第5の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下、本技術を実施するための形態(以下、実施の形態と称する)について説明する。説明は以下の順序により行う。
1.第1の実施の形態(画像処理:複数の焦点領域を設定する例)
2.第2の実施の形態(画像処理:ステレオマッチングを使用する例)
3.第3の実施の形態(画像処理:物体認識を行う例)
4.第4の実施の形態(画像処理:顔認識を行う例)
5.第5の実施の形態(画像処理:構図に基づいて焦点領域を選択する例)
【0024】
<1.第1の実施の形態>
[撮像装置の構成例]
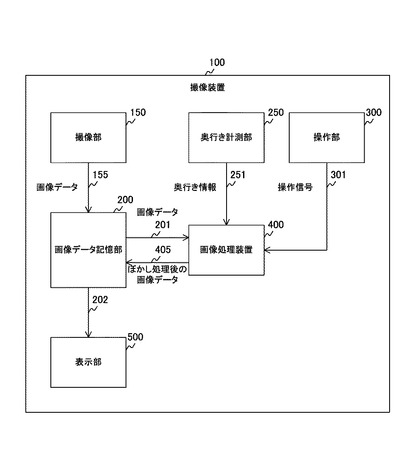
図1は、本技術の第1の実施の形態における撮像装置100の一構成例を示すブロック図である。撮像装置100は、被写体を撮像して、撮像した被写体の画像に対してぼかし処理を実行するものである。撮像装置100は、撮像部150、画像データ記憶部200、奥行き計測部250、操作部300、画像処理装置400、および、表示部500を備える。
【0025】
撮像部150は、被写体を撮像して画像データを生成するものである。撮像部150は、生成した画像データを画像データ記憶部200に信号線155を介して出力する。
【0026】
画像データ記憶部200は、画像データを記憶するものである。詳細には、画像データ記憶部200は、撮像部150および画像処理装置400のそれぞれが生成した画像データを記憶する。
【0027】
奥行き計測部250は、被写体までの奥行きを計測するものである。例えば、奥行き計測部250は、画像内の被写体のボケ具合を解析し、ボケ具合と奥行きとの関係に基づいて、その被写体までの奥行きを求めるDFD法を使用して、奥行きを計測する。奥行き計測部250は、画像内のそれぞれの画素に対応付けて奥行きを計測し、それらの奥行きを示す奥行き情報を生成する。奥行き計測部250は、生成した奥行き情報を画像処理装置400に信号線251を介して出力する。なお、奥行き計測部250は、DFD法以外の方法を使用して奥行きを計測することもできる。例えば、奥行き計測部250は、被写体にレーザ光を照射して、照射時刻に対する反射光の遅延時間に基づいて奥行きを計測するレーザ計測法を使用することもできる。
【0028】
操作部300は、撮像装置100を操作する操作信号を検出するものである。この操作信号は、画像内において複数の焦点領域を指定するための操作信号を含む。操作部300は、検出した操作信号を画像処理装置400に信号線301を介して出力する。
【0029】
画像処理装置400は、画像データに対して、ぼかし処理を行うことにより、遠近感が強調された画像データを生成するものである。具体的には、画像処理装置400は、操作信号に従って画像内に複数の焦点領域を設定する。また、画像処理装置400は、奥行き計測部250により生成された奥行き情報を取得する。そして、画像処理装置400は、画像内のそれぞれの画素を対象画素Pjとして、対象画素ごとに、その対象画素の奥行きと複数の焦点領域のそれぞれの奥行きとの差分絶対値を奥行差分絶対値Δdj_fmとして算出する。ここで、jは、画像内の画素を識別するための番号であり、0乃至N−1の整数である。Nは、画像内の全画素を示す値であり、水平方向の画素数に垂直方向の画素数を乗算した値になる。mは、焦点領域を識別するための番号であり、0乃至M−1の整数である。Mは、設定された焦点領域の個数であり、2以上の整数である。したがって、M個の焦点領域が設定された場合、画像内の画素ごとに、M個の奥行差分絶対値が算出される。
【0030】
対象画素ごとにM個の奥行差分絶対値を算出した後、画像処理装置400は、対象画素ごとに、それらの奥行差分絶対値の最小値を奥行差分最小値Δdj_minとして選択する。したがって、全画素数Nの画像において合計でN個の奥行差分最小値が選択される。
【0031】
奥行差分最小値Δdj_minを選択した後、画像処理装置400は、それぞれの対象画素について、奥行差分最小値Δdj_minに応じたぼかし処理の度合いを算出する。ぼかし処理の度合いを算出する式の具体例については後述する。
【0032】
画像処理装置400は、算出したフィルタ次数に従って、画像データに対してぼかし処理を実行する。画像処理装置400は、ぼかし処理を実行した画像データを画像データ記憶部200に信号線405を介して出力する。
【0033】
表示部500は、画像データ記憶部200から画像データを読み出して表示するものである。
【0034】
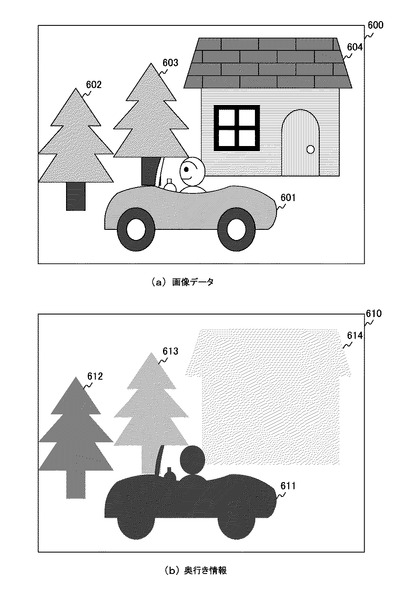
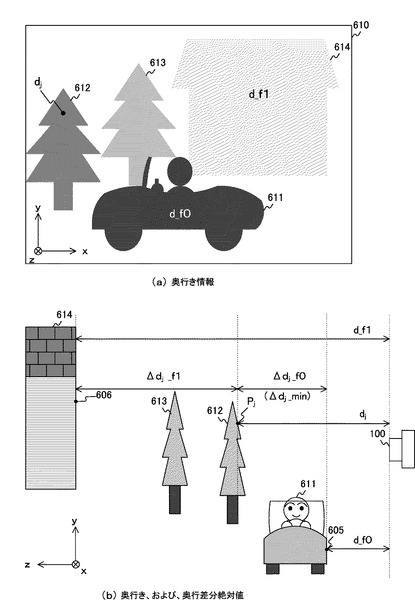
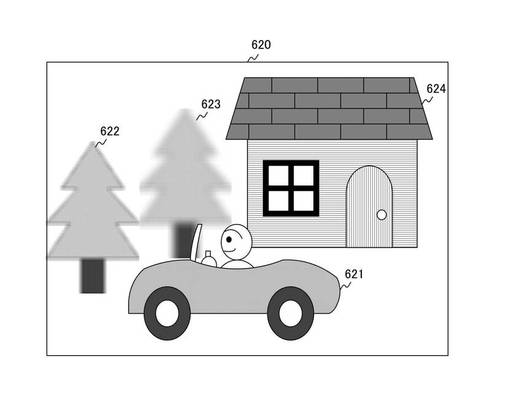
図2は、第1の実施の形態における画像データおよび奥行き情報の一例を示す図である。図2(a)は、画像処理装置400に入力された画像データ600の一例である。画像データ600において、例えば、車および運転手からなる被写体601と、木の被写体602および603と、家の被写体604とが撮像されている。
【0035】
図2(b)は、画像データ600と同期して取得された奥行き情報610の一例を示す図である。奥行き情報610は、それぞれの画素における被写体の奥行きを画素値により示すデータである。例えば、奥行き情報610において奥行きを示す画素値として輝度値が設定され、奥行きが小さいほど、低い輝度値が設定される。奥行き情報610は、画像データ600における被写体601乃至604に対応する被写体611乃至614の奥行き情報を含む。ここで、被写体611乃至614、および、それらの背景のうちの被写体611の奥行きが最も小さく、被写体612、被写体613、被写体614、背景の順に奥行きが大きいものとする。この場合、奥行き情報610において、最も手前の被写体611の輝度値が最も低く設定される。そして、被写体612、被写体613、被写体614、それらの背景の順に奥行きに応じて輝度値が高くなるように設定される。なお、奥行き情報610において、奥行きが小さいほど、高い輝度値が設定されるようにしてもよい。
【0036】
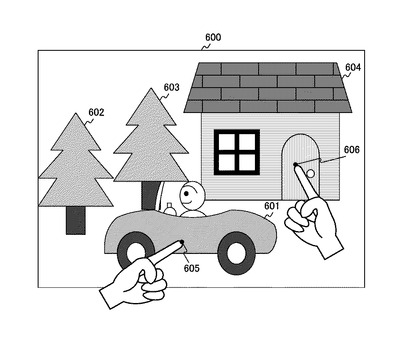
図3は、第1の実施の形態における焦点領域の設定方法の一例を説明するための図である。例えば、最初に撮像装置100が画像データ600をタッチパネルに表示し、ユーザによる操作の受付けを開始する。画像データ600のいずれかの画素を、ユーザが指でタッチすることにより指定すると、撮像装置100における画像処理装置400は、その画素を含む被写体の領域を検出する。例えば、画像処理装置400は、画像内の輝度情報の分布を解析することにより、指定された画素を含む被写体の領域を検出する。画像処理装置400は、輝度情報の分布に加え、色情報の分布の解析結果も含めて被写体領域を検出してもよい。画像処理装置400は、検出した被写体の領域を焦点領域として設定する。なお、ユーザが画素の座標を数字キーで入力するなど、タッチパネルを用いずに撮像装置100が焦点領域を設定する構成としてもよい。
【0037】
一例として、被写体601内の画素605と、被写体604内の画素606とが指定された場合を想定する。この場合、画像処理装置400は、指定された画素を含む被写体601および604を検出して焦点領域に設定する。
【0038】
図4は、第1の実施の形態における奥行き情報、奥行き、および、奥行差分絶対値の一例を示す図である。焦点領域が設定されると、画像処理装置400は、画像内のそれぞれの画素を対象画素として、対象画素の奥行きと、複数の焦点領域のそれぞれの奥行きとから、奥行差分絶対値を算出する。例えば、被写体612内の対象画素Pjの奥行差分絶対値を求める場合を考える。この場合、焦点領域として被写体601および604が設定されると、画像処理装置400は、図4(a)に示すように、対象画素Pjの奥行きdjと、それぞれの焦点領域内のいずれかの画素に対応する奥行きd_f0およびd_f1とを取得する。そして、画像処理装置400は、次式から奥行差分絶対値Δdj_f0およびΔdj_f1を算出する。
Δdj_f0=|dj−d_f0| ・・・式1
Δdj_f1=|dj−d_f1| ・・・式2
【0039】
式1および式2から算出された奥行差分絶対値から、画像処理装置400は、対象画素Pjにおけるぼかし処理の度合いδjを算出する。
【0040】
図4(b)は、図4(a)に例示した画像内の被写体の奥行き方向における位置関係の一例を示した図である。より具体的には、図4(a)に写された風景における水平方向に平行な軸をx軸、垂直方向に平行な軸をy軸、奥行き方向に平行な軸をz軸とした場合、図4(b)は、x軸方向から見た風景である。図4(b)に示すように、被写体611に焦点領域f0が設定されたとすると、撮像装置100から被写体611までのz軸上の距離が奥行きd_f0となる。また、被写体614に焦点領域f1が設定されたとすると、撮像装置100から被写体614までのz軸上の距離が奥行きd_f0となる。被写体612上の画素を対象画素Pjとすると、撮像装置100から被写体612までの距離が奥行きdjとなる。この場合、奥行差分絶対値Δdj_f0は、被写体611における撮像装置100に向けた面から、被写体612における撮像装置100に向けた面までの距離である。また、奥行差分絶対値Δdj_f1は、被写体612における撮像装置100に向けた面から、被写体614における撮像装置100に向けた面までの距離である。
【0041】
ここで、焦点領域とされた被写体611および614の撮像装置100に向けた面が平坦でない場合、実際には、その焦点領域内の画素ごとの奥行きに、多少のばらつきが生じる。しかし、通常、そのばらつきの程度は、奥行きの単位と比較すると無視できるほど小さい。このため、画像処理装置400は、焦点領域内のいずれかの画素(例えば、指定された画素605および606)に対応する奥行きを、その焦点領域に対応する奥行きとして取得している。
【0042】
[画像処理装置の構成例]
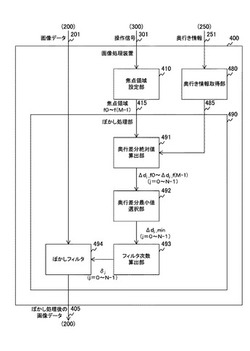
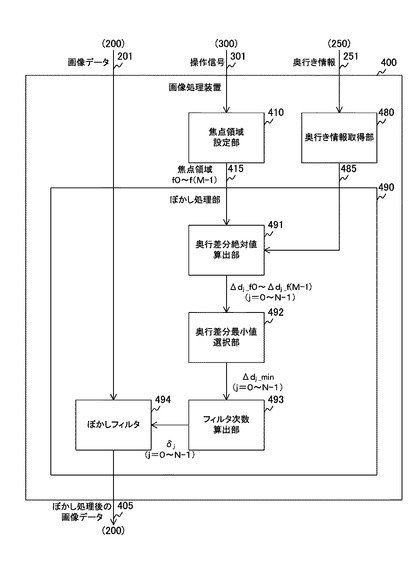
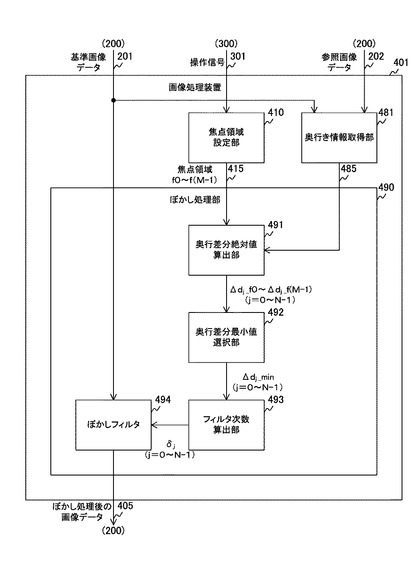
図5は、第1の実施の形態における画像処理装置400の一構成例を示すブロック図である。画像処理装置400は、焦点領域設定部410、奥行き情報取得部480、および、ぼかし処理部490を備える。
【0043】
焦点領域設定部410は、操作信号に従って、複数の焦点領域f0乃至f(M−1)を設定するものである。焦点領域設定部410は、設定した焦点領域を示す焦点領域情報をぼかし処理部490に信号線415を介して出力する。この焦点領域情報は、例えば、焦点領域ごとに焦点領域の輪郭の画素群の座標を含む。なお、焦点領域情報は、焦点領域内の全画素の座標を含む情報であってもよい。また、焦点領域情報は、焦点領域における画素値を2値のうちの一方の値(例えば、「1」)に、それ例外の領域における画素値を他方の値(例えば、「0」)に設定した画像データであってもよい。この画像データには、設定された焦点領域のそれぞれを識別する識別情報が付加される。識別情報は、例えば、ユーザにより指定された画像内の画素の座標と、その座標に対応する焦点領域の番号(0乃至M−1)とを含む。
【0044】
なお、焦点領域設定部410は、輝度値の分布から、指定された画素を含む被写体の領域を検出しているが、他の方法を使用して被写体を検出することもできる。例えば、焦点領域設定部410は、奥行き情報を参照して、指定された画素に対応する奥行きとの差分が所定値以下の奥行きの画素群を被写体の領域として検出してもよい。また、焦点領域設定部410は、エッジ検出を実行して、指定された画素を含む被写体の輪郭を抽出することにより、被写体を検出することもできる。
【0045】
また、焦点領域設定部410は、検出した被写体の領域を焦点領域に設定しているが、指定された画素を含む一定面積の図形(円など)内の領域を焦点領域に設定することもできる。
【0046】
また、焦点領域設定部410は、焦点領域の個数を閾値T(Tは、2以上の整数)以下に制限することもできる。この場合、焦点領域設定部410は、焦点領域の個数がT個に達すると、それ以降の焦点領域を指定する操作を受け付けないものとする。
【0047】
奥行き情報取得部480は、奥行き計測部250が生成した奥行き情報を取得するものである。奥行き情報取得部480は、取得した奥行き情報をぼかし処理部490に信号線485を介して出力する。なお、奥行き情報取得部480は、特許請求の範囲に記載の奥行き取得部の一例である。
【0048】
ぼかし処理部490は、画像データに対してぼかし処理を実行するものである。ぼかし処理部490は、奥行差分絶対値算出部491、奥行差分最小値選択部492、フィルタ次数算出部493、および、ぼかしフィルタ494を備える。
【0049】
奥行差分絶対値算出部491は、焦点領域情報および奥行き情報に基づいて、画像内のそれぞれの対象画素Pj(jは0乃至N−1)について、奥行差分絶対値Δdj_f0乃至Δdj_f(M−1)を算出するものである。奥行差分絶対値算出部491は、算出した奥行差分絶対値を奥行差分最小値選択部492に出力する。
【0050】
奥行差分最小値選択部492は、画像内のそれぞれの対象画素について、奥行差分最小値Δdj_minを選択するものである。奥行差分最小値選択部492は、選択した奥行差分最小値をフィルタ次数算出部493に出力する。
【0051】
フィルタ次数算出部493は、画像内のそれぞれの対象画素Pjについて、フィルタ次数δjを算出するものである。フィルタ次数算出部493は、例えば、以下の式3からぼかし処理の度合いを算出する。ただし、以下の式3において、δjは、対象画素Pjのぼかし処理の度合いであり、例えば、ぼかしフィルタのフィルタ次数である。設定されたフィルタ次数に応じて、ぼかし量が増減する。また、Δdj_minは対象画素Pjの奥行差分最小値であり、単位は例えば[m]である。Aは、Δdj_minの値をδjに換算するための係数である。
δj=A・Δdj_min・・・式3
【0052】
なお、フィルタ次数算出部493は、式3の代わりに、次式を使用して、ぼかし処理の度合いδjを算出することもできる。ただし、次式において、Dは、撮像装置100のレンズの有効口径であり、単位は例えば[mm]である。djは、対象画素Pjの奥行きである。「R」は、画像データの撮像倍率である。Cは、D、Δdj_min、dj、および、Rにより求められる、ぼかし量をフィルタ次数δjに変換するための係数である。画像処理装置400は、式3または次式を使用して、画像内の全画素について、フィルタ次数を算出する。次式を使用した場合、実際の光学系の特性に即したぼかし量が算出される。フィルタ次数算出部493は、算出したフィルタ次数δjをぼかしフィルタ494に出力する。
【数1】

【0053】
ぼかしフィルタ494は、フィルタ次数δjに従って、画像データに対してぼかし処理を実行するものである。ぼかしフィルタ494は、例えば、平滑化フィルタの一種のガウシアンフィルタであり、例えば、次式からぼかし処理後における画素(x,y)の画素値I'(x,y)を算出する。ただし、以下の式5におけるI(x+k,y+l)は、ぼかし処理前の画素(x+k,y+l)の画素値である。rは、ガウシアンフィルタの半径であり、0以上の整数である。w(k,l)は、画素値I(x+k,y+l)に乗算すべき重み係数である。また、以下の式6におけるσは標準偏差であり、所定の実数が設定される。以下の式5および式6により、ガウシアンフィルタの中心に近いほど高く、周辺に近いほど小さい重み係数が設定される。以下の式7における「round()」は、かっこ内の数値に対して所定の端数処理を実行して0以上の整数値を返す関数である。例えば、端数処理として、小数点以下を四捨五入する演算が実行される。
【数2】
【数3】
r=round(δj/2) ・・・式7
【0054】
なお、ぼかし処理部490は、ぼかし処理の度合いとして、ガウシアンフィルタのフィルタ次数を算出しているが、フィルタ次数以外のパラメータをぼかし処理の度合いとして算出してもよい。例えば、ぼかし処理部490は、ぼかし処理の度合いとして、標準偏差σを算出することもできる。
【0055】
また、ぼかし処理部490は、ガウシアンフィルタを使用してぼかし処理を実行しているが、移動平均フィルタなど、ガウシアンフィルタ以外のぼかしフィルタを使用することもできる。
【0056】
また、画像処理装置400を撮像装置100の内部に設ける構成としているが、画像処理装置400を外部に設けて撮像装置100と画像処理装置400とを別々の装置とすることもできる。
【0057】
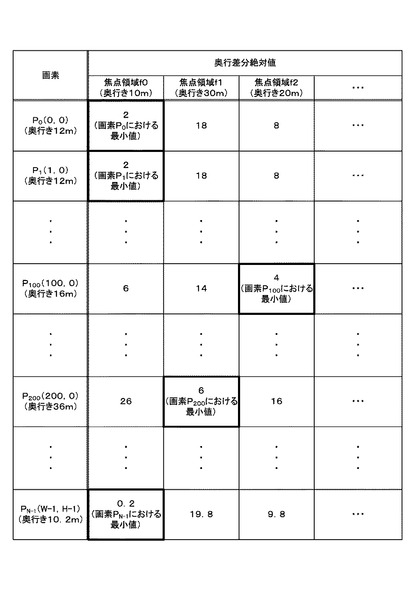
図6は、第1の実施の形態における奥行差分絶対値の一例を示す図である。焦点領域f0、f1、および、f2を含む複数の焦点領域が設定された場合を考える。焦点領域f0、f1、および、f2に対応する奥行きは、それぞれ10m、30m、および、20mであるものとする。ここで、画素P0(0,0)に対応する奥行きが12mであるとき、焦点領域f0の奥行きとの間の奥行差分絶対値は2mである。また、焦点領域f1およびf2の奥行きとの間の奥行差分絶対値は、18mおよび8mである。これらの奥行差分絶対値のうち、最小値である2mが、画素P0における奥行差分最小値として選択される。
【0058】
同様の方法で、画素P100(100,0)に対応する奥行きが16mであるとき、4mが、その画素における奥行差分最小値として選択される。また、画素P200(200,0)に対応する奥行きが36mであるとき、6mがその画素における奥行差分最小値として選択される。画素PN−1(W−1,H−1)に対応する奥行きが10.2mであるとき、0.2mが、その画素における奥行差分最小値として選択される。ここで、Wは、画像の水平方向における全画素数であり、1以上の整数である。Hは、画像の垂直方向における全画素数であり、1以上の整数である。このように、画像内のそれぞれの画素について、設定された焦点領域ごとに奥行差分絶対値が算出される。そして、画素ごとに、それらの奥行差分絶対値の中の最小値が奥行差分最小値として選択される。
【0059】
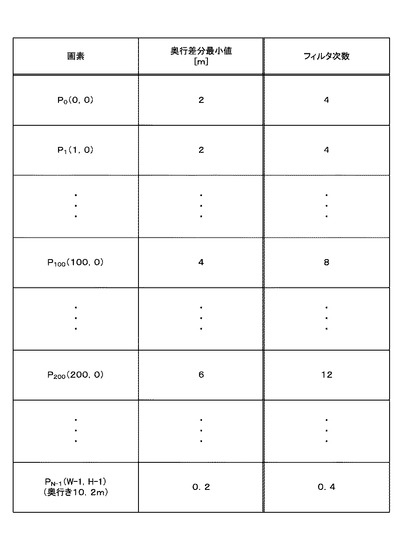
図7は、第1の実施の形態におけるフィルタ次数の一例を示す図である。上述の式3において、係数Aとして2が設定された場合を考える。この場合、画素P0の奥行差分最小値が2mであれば、式3より、フィルタ次数として「4」が算出される。同様に、画素P100およびP200の奥行差分最小値が4mおよび6mであれば、式3より、フィルタ次数として「8」および「12」が算出される。画素PN-1の奥行差分最小値が0.2mであれば、式3よりフィルタ次数として0.4が算出される。
【0060】
図8は、第1の実施の形態におけるぼかし処理後の画像データ620の一例を示す図である。画像データ620における被写体621乃至624は、図2(a)に例示した平価捕まえの画像データ600における被写体601乃至604に対応する被写体である。被写体621および624が焦点領域として設定されたものとする。また、被写体621乃至624のうちの被写体621の奥行きが最も小さく、被写体622、被写体623、被写体624の順に奥行きが大きくなるものとする。被写体622および623は、奥行き方向において被写体624よりも被写体621に近いものとする。また、被写体622は、被写体623よりも被写体621に近いものとする。
【0061】
この場合、奥行き方向において、手前にある焦点領域(被写体621)から奥に向かうほど、ぼかし処理の度合いが大きくなる。そして、奥行き方向において手前の焦点領域(被写体621)と奥の焦点領域(被写体624)の中間付近でぼかし処理の度合いが最も大きくなる。奥行き方向において、その中間付近を越えて、奥の焦点領域(被写体624)に近づくほど、ぼかし処理の度合いが小さくなる。例えば、奥行き方向において被写体622は、被写体623よりも、焦点領域が設定された被写体621に近いため、被写体622に対するぼかし処理の度合いは、被写体623よりも小さくなる。このように、複数の焦点領域が設定された場合であっても、奥行き方向において最も近い焦点領域からの奥行きに応じてぼかし処理の度合いが変更されるため、自然な遠近感が得られる。
【0062】
[画像処理装置の動作例]
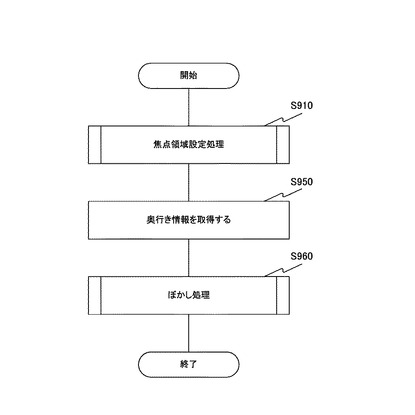
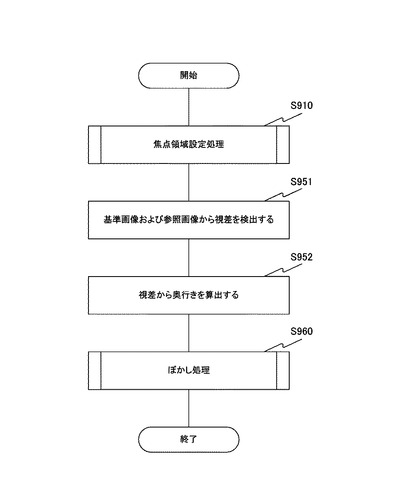
続いて、図9乃至図11を参照して、第1の実施の形態における画像処理装置400の動作例について説明する。図9は、第1の実施の形態における画像処理装置400の動作の一例を示すフローチャートである。この動作は、撮像された画像データが画像処理装置400に入力されたときに開始する。画像処理装置400は、複数の焦点領域を設定するための焦点領域設定処理を実行する(ステップS910)。画像処理装置400は、奥行き計測部250からの奥行き情報を取得する(ステップS950)。画像処理装置400は、画像データをぼかすためのぼかし処理を実行する(ステップS960)。ステップS960の後、画像処理装置400は、ぼかし処理後の画像データを生成するための動作を終了する。
【0063】
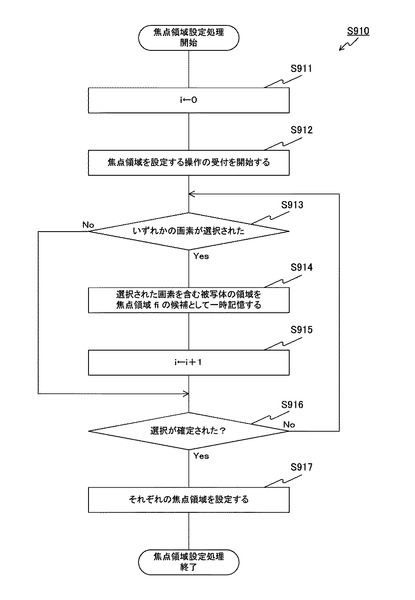
図10は、第1の実施の形態における焦点領域設定処理の一例を示すフローチャートである。画像処理装置400における焦点領域設定部410は、変数iを0に初期化し(ステップS911)、焦点領域を設定するための操作の受付を開始する(ステップS912)。そして、焦点領域設定部410は、いずれかの画素が、焦点領域内の画素として選択されたか否かを判断する(ステップS913)。
【0064】
いずれかの画素が選択されたのであれば(ステップS913:Yes)、焦点領域設定部410は、選択された画素を含む被写体の領域を焦点領域fiの候補として一時記憶する(ステプS914)。焦点領域設定部410は、変数iに1を加算する(ステップS915)。
【0065】
画素が選択されていない場合(ステップS913:No)、またはステップS915の後、焦点領域設定部410は、画素の選択が確定されたか否かを判断する(ステップS916)。選択が確定されていなければ(ステップS916:No)、焦点領域設定部410は、ステップS913に戻る。選択が確定されたのであれば(ステップS916:Yes)、焦点領域設定部410は、それぞれの候補を焦点領域として設定する(ステップS917)。ステップS917の後、焦点領域設定部410は、焦点領域設定処理を終了する。
【0066】
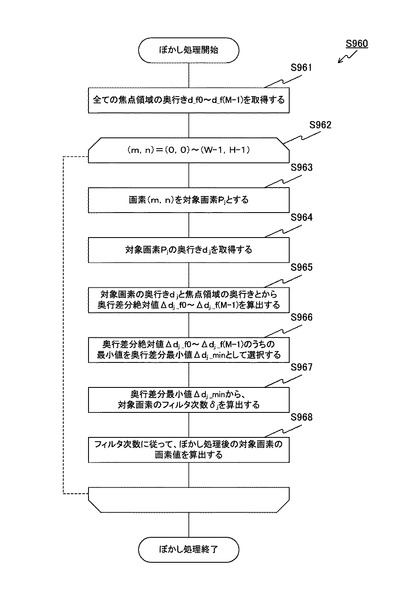
図11は、第1の実施の形態におけるぼかし処理の一例を示すフローチャートである。画像処理装置400におけるぼかし処理部490は、まず、全ての焦点領域の奥行きd_f0乃至d_f(M−1)を取得する(ステップS961)。ぼかし処理部490は、変数mおよびnを0に初期化して、ループ処理を開始する。このループ処理において、ぼかし処理部490は、後述するステップS963乃至968を実行してmまたはnを1つ増分する。増分後にm>W−1かつn>H−1であればループ処理を終了し、そうでなければステップS963に戻り、ループ処理を継続する(ステップS962)。
【0067】
ぼかし処理部490は、画素(m,n)を対象画素Pjとする(ステップSS963)。ぼかし処理部490は、対象画素Pjの奥行きdjを取得する(ステップS964)。ぼかし処理部490は、対象画素Pjの奥行きdjと、焦点領域の奥行きd_f0乃至d_f(M−1)とから、奥行差分絶対値Δdj_f0乃至Δdj_f(M−1)を算出する(ステップS965)。ぼかし処理部490は、算出した奥行差分絶対値Δdj_f0乃至Δdj_f(M−1)のうちの最小値を対象画素Pjの奥行差分最小値Δdj_minとして選択する(ステップS966)。ぼかし処理部490は、選択した奥行差分最小値Δdj_minから、上述の式3を使用して対象画素Pjのフィルタ次数δjを算出する(ステップS967)。ぼかし処理部490は、算出したフィルタ次数に従って、上述の式5および式6を使用して、ぼかし処理後の対象画素Pjの画素値を算出する(ステップS968)。
【0068】
ループ処理(ステップS962)の終了後、ぼかし処理部490は、ぼかし処理を終了する。
【0069】
このように、第1の実施の形態によれば、焦点領域設定部410が複数の焦点領域を設定する。また、奥行き情報取得部480が、画素に対応づけて奥行きを取得する。ぼかし処理部490は、画像内の画素ごとに、画素の奥行きと焦点領域のそれぞれに対応する奥行きとの間のそれぞれの差分の絶対値を奥行差分最小値として算出する。そして、ぼかし処理部490は、奥行差分絶対値のうちの最小値を奥行差分最小値として画素ごとに選択する。ぼかし処理部490は、奥行差分最小値からフィルタ次数を算出し、そのフィルタ次数に従ってぼかし処理を実行する。これにより、奥行き方向において被写体に最も近い焦点領域からの距離に応じて、その被写体のぼかし処理の度合いが変更される。この結果、複数の焦点領域が設定された場合において自然な遠近感を表わす画像が生成される。
【0070】
<2.第2の実施の形態>
[撮像装置の構成例]
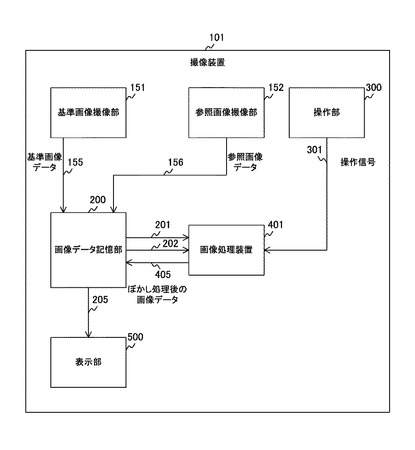
次に、図12乃至16を参照して、本技術の第2の実施の形態について説明する。図12は、第2の実施の形態における撮像装置101の一構成例を示すブロック図である。撮像装置101は、ステレオマッチング法により奥行き情報を生成する点において第1の実施の形態の撮像装置100と異なる。ステレオマッチング法の詳細については後述する。撮像装置101は、撮像部150の代わりに基準画像撮像部151および参照画像撮像部152を備え、画像処理装置400の代わりに画像処理装置401を備え、奥行き計測部250を有しない点において撮像装置100と異なる。
【0071】
基準画像撮像部151は、基準画像を撮像するものである。ここで、基準画像は、奥行きの算出において基準とされる画像である。例えば、撮像装置101の右側のレンズで撮像された右画像と左側のレンズで撮像された左画像とのうちの、いずれかが基準画像とされる。基準画像撮像部151は、撮像した基準画像を示す基準画像データを画像データ記憶部200に信号線155を介して出力する。
【0072】
参照画像撮像部152は、参照画像を撮像するものである。ここで、参照画像は、基準画像と同期して撮像された画像であり、奥行きの算出において参照される画像である。例えば、右画像および左画像のうちの、基準画像以外の画像が参照画像とされる。参照画像撮像部152は、撮像した参照画像を示す参照画像データを画像データ記憶部200に信号線156を介して出力する。
【0073】
画像処理装置401は、画像データ記憶部200から、基準画像データおよび参照画像データを読み出す。画像処理装置401は、基準画像データおよび参照画像データからステレオマッチング法を使用して、画素に対応付けて奥行きを算出する。画像処理装置401は、算出した奥行きに基づいて、基準画像に対してぼかし処理を実行する。
【0074】
[画像処理装置の構成例]
続いて、図13を参照して、第2の実施の形態における画像処理装置の構成例について説明する。図13は、第2の実施の形態における画像処理装置401の一構成例を示すブロック図である。画像処理装置401は、奥行き情報取得部480の代わりに奥行き情報取得部481を備える点において第1の実施の形態の画像処理装置400と異なる。
【0075】
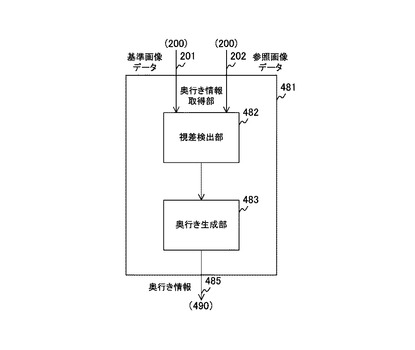
図14は、第2の実施の形態における奥行き情報取得部481の一構成例を示すブロック図である。奥行き情報取得部481は、視差検出部482および奥行き生成部483を備える。
【0076】
視差検出部482は、基準画像および参照画像から視差を検出するものである。具体的には、視差検出部482は、画像データ記憶部200から、基準画像データおよび参照画像データを読み出す。視差検出部482は、基準画像内のいずれかの画素を対象点とし、参照画像内において、その対象点と対応する対応点を求める。視差検出部482は、対象点の水平座標と、対応点の水平座標との間の差分の絶対値を視差として検出する。視差検出部482は、基準画像内の全ての画素について、視差を検出して奥行き生成部483に出力する。
【0077】
奥行き生成部483は、視差から奥行き情報を生成するものである。視差から奥行きを求める方法については、後述する。奥行き生成部483は、画像内のそれぞれの画素に対応付けて奥行きを求め、奥行き情報を生成する。奥行き生成部483は、奥行き情報をぼかし処理部490に出力する。
【0078】
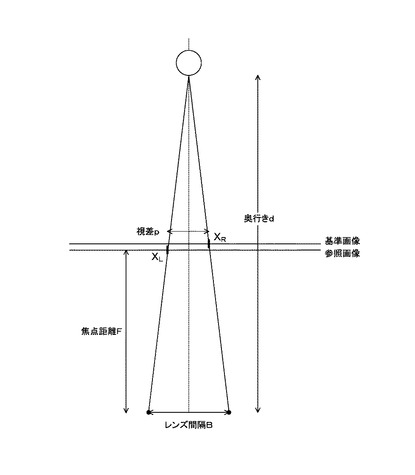
図15は、第2の実施の形態における視差と奥行きとの関係の一例を示す図である。基準画像における対象点の水平座標をXRとし、参照画像における対応点の水平座標をXLとする。この場合、視差pは次式により算出される。
p=|XR−XL| ・・・式8
【0079】
また、基準画像撮像部151と参照画像撮像部152とのそれぞれのレンズ間の間隔をBとし、焦点距離をFとする。この場合、対象点(XR)、対応点(XL)、および、被写体がなす三角形と、基準画像撮像部151のレンズ、参照画像撮像部152のレンズ、および、被写体がなす三角形とは相似である。このため、その被写体までの奥行きをdとすると、次式に示す関係式が成立する。
p:F=B:d ・・・式9
【0080】
式9を変形することにより、次式が得られる。
d=B×F/p ・・・式10
【0081】
BおよびFは、既知の値であるから、検出された視差pを式10に代入することにより、奥行きdが算出される。
【0082】
[画像処理装置の動作例]
続いて、図16を参照して、第2の実施の形態における画像処理装置401の動作例について説明する。図16は、第2の実施の形態における画像処理装置401の動作の一例を示すフローチャートである。画像処理装置401の動作は、ステップS950の代わりにステップS951およびS952を実行する点において第1の実施形態の画像処理装置400の動作と異なる。
【0083】
画像処理装置401は、基準画像および奥行き画像から視差pを検出する(ステップS951)。そして、画像処理装置401は、式10に基づいて視差pから奥行きdを算出して奥行き情報を生成する(ステップS952)。
【0084】
このように、本技術の第2の実施の形態によれば、焦点領域設定部410が焦点領域を設定し、奥行き情報取得部481は、基準画像および参照画像から視差を検出し、その視差に基づいて奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、画像処理装置401自身が奥行き情報を生成することができる。
【0085】
<3.第3の実施の形態>
[画像処理装置の構成例]
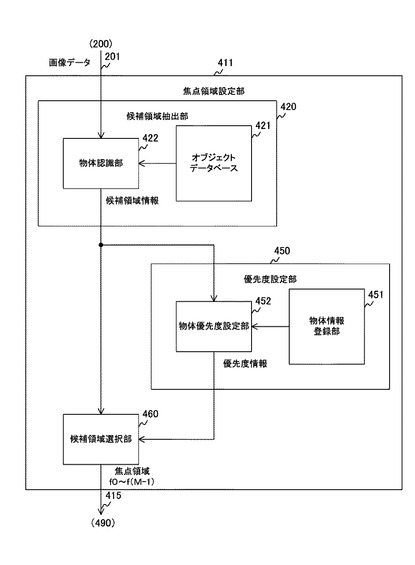
次に、図17および図18を参照して、本技術の第3の実施の形態について説明する。図17は、第3の実施の形態における焦点領域設定部411の一構成例を示すブロック図である。焦点領域設定部411は、画像内の複数の物体を認識して、それらの物体の領域を焦点領域に設定する点において第1の実施の形態の焦点領域設定部410と異なる。焦点領域設定部411は、候補領域抽出部420、優先度設定部450、および、候補領域選択部460を備える。
【0086】
候補領域抽出部420は、画像において焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出するものである。候補領域抽出部420は、オブジェクトデータベース421および物体認識部422を備える。
【0087】
オブジェクトデータベース421は、認識対象の物体を認識するための情報を記憶するデータベースである。例えば、オブジェクトデータベース421は、認識対象の物体について学習した画像データ、物体のカテゴリ、物体の特徴量の情報などを記憶する。
【0088】
物体認識部422は、オブジェクトデータベース421を参照して、画像における複数の物体を認識するものである。物体認識部422は、認識した物体の領域のそれぞれを焦点領域の候補である候補領域とする。物体認識部422は、画像内の候補領域を示す候補領域情報を生成して優先度設定部450および候補領域選択部460に出力する。
【0089】
優先度設定部450は、候補領域の選択における優先度を、それぞれの候補領域に設定するものである。優先度設定部450は、物体情報登録部451および物体優先度設定部452を備える。
【0090】
物体情報登録部451は、選択において優先度を変更すべき物体に関する物体情報を登録するものである。物体情報は、具体的には、物体の画像データや、物体の名称などである。
【0091】
物体優先度設定部452は、候補領域のそれぞれの優先度を設定するものである。例えば、物体優先度設定部452は、登録された物体の画像に類似する候補領域の優先度を、類似しない候補領域よりも高く設定する。なお、物体優先度設定部452は、逆に、登録された物体の画像に類似しない候補領域に高い優先度を設定することもできる。
【0092】
また、物体優先度設定部452は、候補領域の面積に基づいて優先度を設定することもできる。具体的には、物体優先度設定部452は、候補領域の面積が大きいほど、高い優先度を設定する。物体優先度設定部452は、全ての候補領域の面積の平均値を算出して、候補領域の面積が、その平均値に近いほど、高い優先度を設定してもよい。
【0093】
また、物体優先度設定部452は、候補領域に対応する奥行きに基づいて優先度を設定することもできる。この場合、物体優先度設定部452は、奥行きが大きいほど高い優先度を設定してもよいし、奥行きが小さいほど高い優先度を設定してもよい。また、物体優先度設定部452は、画像内の全画素に対応する奥行きの中の最大値および最小値を求め、その最大値または最小値に近い奥行きの物体ほど、高い優先度を設定してもよい。このように手前の物体と奥の物体とが優先されると、奥行き方向において距離の離れた物体に焦点領域が設定されやすくなる。この結果、手前の物体から奥に向かうほど、ぼかしが大きくなり、手前および奥の物体の中間付近でぼかしが最大となり、そこから奥の物体に向かうほどぼかしが小さくなるというぼかし具合が顕著になる。このため、画像において、遠近感がより強調されるようになる。
【0094】
物体優先度設定部452は、設定した優先度を示す優先度情報を候補領域選択部460に出力する。
【0095】
候補領域選択部460は、候補領域情報の示す候補領域の中から複数の候補領域を選択して焦点領域に設定するものである。ただし、候補領域選択部460は、設定する焦点領域の個数を、T(Tは、2以上の整数)個以下に制限する。具体的には、候補領域選択部460は、候補領域の個数がT個以下である場合、全ての候補領域を焦点領域として設定する。候補領域がT個より多い場合、候補領域選択部460は、優先度設定部450が設定した優先度が高い候補領域を優先してT個の候補領域を選択して焦点領域として設定する。候補領域選択部460は、設定した焦点領域を示す焦点領域情報をぼかし処理部490に出力する。
【0096】
なお、焦点領域設定部411がオブジェクトデータベース421を備える構成としているが、焦点領域設定部411がオブジェクトデータベース421を有しない構成とすることもできる。例えば、撮像装置100の外部にオブジェクトデータベースを設置しておき、焦点領域設定部411が、ネットワークを介して、そのオブジェクトデータベースにアクセスする構成とすればよい。同様に、焦点領域設定部411は、物体情報登録部451を外部に設ける構成とすることもできる。
【0097】
また、焦点領域設定部411が優先度設定部450を備える構成としているが、焦点領域設定部411が優先度設定部450を有しない構成とすることもできる。この場合、候補領域選択部460は、焦点領域の個数を制限しないで全ての物体の領域を焦点領域に設定してもよいし、焦点領域の個数をT個に制限してもよい。優先度設定部450を備えずにT個以下に制限する場合において候補領域がT個を超えたのであれば、候補領域選択部460は、無作為にT個の物体領域を選択すればよい。
【0098】
[画像処理装置の動作例]
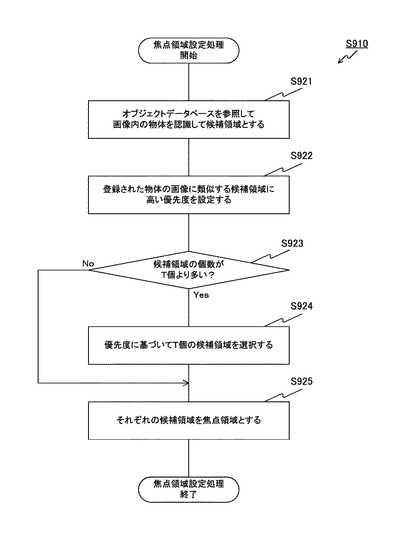
続いて、図18を参照して、第3の実施の形態における画像処理装置の動作例について説明する。図18は、第3の実施の形態における焦点領域設定処理の一例を示すフローチャートである。焦点領域設定部411における物体認識部422は、オブジェクトデータベース421を参照して画像内の物体を認識して、その領域を候補領域とする(ステップS921)。優先度設定部450は、登録された物体の画像に類似する候補領域に高い優先度を設定する(ステップS922)。候補領域選択部460は、候補領域の個数がT個より多いか否かを判断する(ステップS923)。候補領域の個数がT個より多ければ(ステップS923:Yes)、候補領域選択部460は、優先度に基づいてT個の候補領域を選択する(ステップS924)。
【0099】
候補領域の個数がT個以下である場合(ステップS923:No)、または、ステップS924の後、候補領域選択部460は、それぞれの候補領域を焦点領域として設定する(ステップS925)。ステップS925の後、焦点領域設定部411は、焦点領域設定処理を終了する。
【0100】
このように、第3の実施の形態によれば、焦点領域設定部411は、画像内の物体を認識して、その物体の領域を焦点領域に設定する。奥行き情報取得部480は、奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、ユーザが焦点領域を設定しなくとも、画像処理装置400自身が焦点領域を設定することができる。
【0101】
<4.第4の実施の形態>
[画像処理装置の構成例]
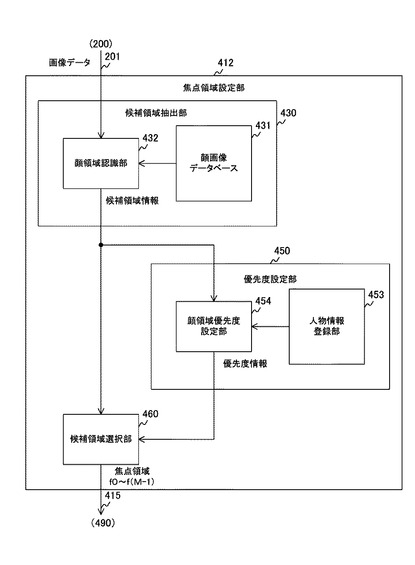
次に、図19乃至21を参照して、本技術の第4の実施の形態について説明する。図19は、第4の実施の形態における焦点領域設定部412の一構成例を示すブロック図である。焦点領域設定部412は、画像内の複数の顔を認識して、それらの顔の領域を焦点領域に設定する点において第1の実施の形態の焦点領域設定部410と異なる。焦点領域設定部412は、候補領域抽出部430、優先度設定部450、および、候補領域選択部460を備える。
【0102】
第4の実施の形態の候補領域抽出部430は、物体の代わりに顔を認識する点において、第3の実施の形態の候補領域抽出部420と異なる。候補領域抽出部430は、顔画像データベース431および顔認識部432を備える。
【0103】
顔画像データベース431は、画像における顔を認識するため情報を記憶するデータベースである。顔画像データベース431は、例えば、様々な人物の顔画像データ、顔のパーツの特徴を数値化したデータ、および、それらの人物の性別や年齢などのメタデータを記憶する。
【0104】
顔認識部432は、顔画像データベース431を参照して、画像における複数の顔を認識するものである。顔認識部432は、認識した、それぞれの顔の領域を候補領域とする。
【0105】
第3の実施の形態の優先度設定部450は、特定の人物の顔画像に類似する候補領域を優先する点において第3の実施の形態の優先度設定部450と異なる。第4の実施の形態における優先度設定部450は、人物情報登録部453および顔領域優先度設定部454を備える。
【0106】
人物情報登録部453は、選択において優先度を変更したい人物に関する人物情報を登録するものである。人物情報は、具体的には、特定の人物の顔画像データ、その人物の性別や年齢などのメタデータなどである。
【0107】
顔領域優先度設定部454は、候補領域のそれぞれの優先度を設定するものである。例えば、顔領域優先度設定部454は、登録された人物を認識して、認識した人物の顔画像に類似する候補領域の優先度を、それ以外の候補領域よりも高く設定する。
【0108】
第4の実施の形態の候補領域選択部460は、第3の実施の形態の候補領域選択部460と同様のものである。
【0109】
なお、焦点領域設定部412は、顔画像データベース431および人物情報登録部453を外部に設ける構成とすることもできる。
【0110】
また、焦点領域設定部412が優先度設定部450を備える構成としているが、焦点領域設定部412が優先度設定部450を有しない構成とすることもできる。
【0111】
また、優先度設定部450は、登録された人物の顔画像に類似する候補領域に高い優先度を設定しているが、逆に、登録された人物の顔画像に類似する候補領域の優先度を低く設定することもできる。
【0112】
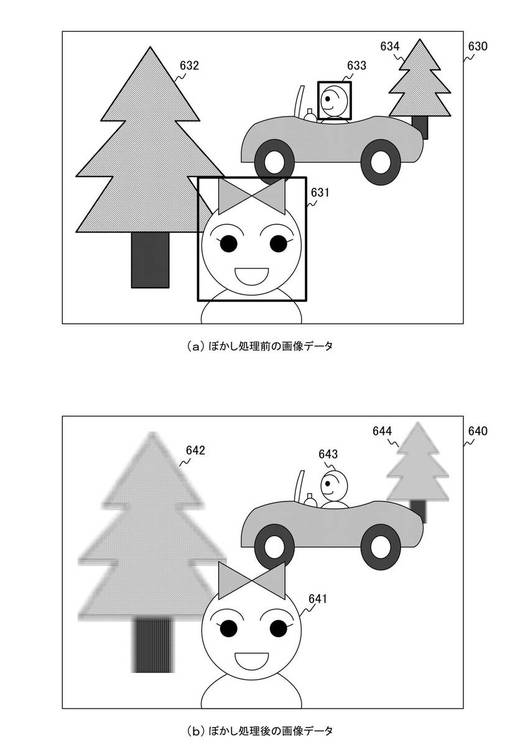
図20は、第4の実施の形態におけるぼかし処理の前後の画像データの一例を示す図である。図20(a)は、ぼかし処理前の画像データの一例である。この画像データは、顔領域631および633と、木の被写体632および634とを含む。焦点領域設定部412は、顔領域631および633を認識し、これらの顔領域を焦点領域に設定する。そして、ぼかし処理部490は、奥行差分最小値に応じた度合いのぼかし処理を実行する。
【0113】
図20(b)は、ぼかし処理後の画像データの一例である。顔領域631および633に対応する顔領域を含む被写体641および643には、ぼかし処理が実行されていない。被写体641は顔以外に胴体を含み、被写体643は顔以外に胴体および車を含むが、これらの胴体および車は、顔と奥行きがほぼ同じであるため、ぼかし処理が実行されない。一方、木の被写体632および632に対応する被写体642および644には、奥行差分最小値に応じた度合いのぼかし処理が実行されている。
【0114】
[画像処理装置の動作例]
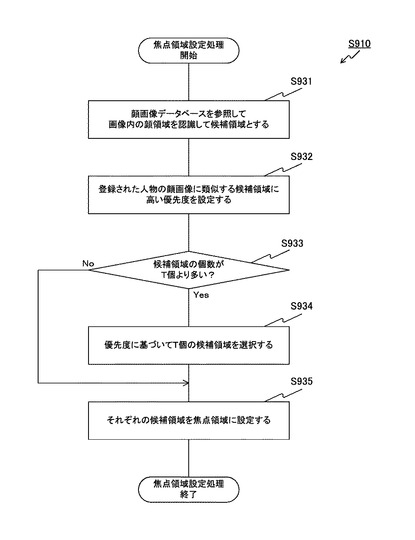
続いて、図21を参照して、第4の実施の形態における画像処理装置400の動作例について説明する。図21は、第4の実施の形態における焦点領域設定処理の一例を示すフローチャートである。焦点領域設定部412における顔認識部432は、顔画像データベース431を参照して画像内の顔領域を認識して候補領域とする(ステップS931)。優先度設定部450は、登録された人物の顔画像に類似する候補領域に高い優先度を設定する(ステップS932)。ステップS933乃至S935は、第3の実施の形態におけるステップS923乃至S925と同様の処理である。
【0115】
このように、第4の実施の形態によれば、焦点領域設定部412は、画像処理装置400は、画像内の顔領域を認識して、その顔領域を焦点領域に設定する。奥行き情報取得部480は、奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、ユーザが焦点領域を設定しなくとも、画像処理装置400自身が焦点領域を設定することができる。
【0116】
<5.第5の実施の形態>
[画像処理装置の構成例]
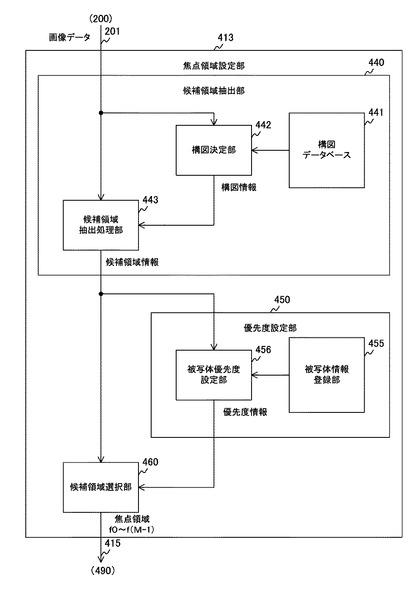
次に、図22乃至25を参照して、本技術の第5の実施の形態について説明する。図22は、第5の実施の形態における焦点領域設定部413の一構成例を示すブロック図である。焦点領域設定部413は、構図に基づいて焦点領域を設定する点において第1の実施の形態の焦点領域設定部410と異なる。焦点領域設定部413は、候補領域抽出部440、優先度設定部450、および、候補領域選択部460を備える。
【0117】
第5の実施の形態の候補領域抽出部440は、構図に基づいて候補領域を抽出する点において、第3の実施の形態の候補領域抽出部420と異なる。候補領域抽出部440は、構図データベース441、構図決定部442、および、候補領域抽出処理部443を備える。
【0118】
構図データベース441は、三分割構図、パターン構図、放射線構図などの各種の構図に関する情報を記憶するものである。例えば、構図データベース441は、構図を構成する構図構成要素の画像内の配列パターンや、構図の名称などを記憶する。構図構成要素は、物体や顔などの被写体や、エッジ検出などにより検出される線分を含む。
【0119】
構図決定部442は、構図を決定するものである。構図決定部442は、例えば、画像内の被写体や線分を検出して、構図データベース441を参照し、被写体等の形状や配置が最も合致する構図を選択して画像の構図に決定する。構図決定部442は、決定した構図を示す構図情報を候補領域抽出処理部443に出力する。なお、構図決定部442は、ユーザの操作に従って、構図を決定することもできる。
【0120】
候補領域抽出処理部443は、決定された構図において主要な被写体の領域を候補領域として抽出するものである。候補領域抽出処理部443は、抽出した候補領域を示す候補領域情報を生成して優先度設定部450および候補領域選択部460に出力する。
【0121】
第3の実施の形態の優先度設定部450は、物体に限らず、物体や顔などの様々な被写体の領域の優先度を設定する点において第3の実施の形態の優先度設定部450と異なる。第4の実施の形態における優先度設定部450は、被写体情報登録部455および被写体優先度設定部456を備える。
【0122】
被写体情報登録部455は、選択において優先度を変更したい被写体に関する人物情報を登録するものである。被写体情報は、具体的には、特定の被写体の画像データや、被写体の名称などの情報である。
【0123】
被写体優先度設定部456は、候補領域のそれぞれの優先度を設定するものである。例えば、被写体優先度設定部456は、登録された被写体の画像に類似する候補領域の優先度を、類似しない候補領域よりも高く設定する。なお、被写体優先度設定部456は、逆に、登録された被写体の画像に類似する候補領域の優先度を低く設定することもできる。
【0124】
第5の実施の形態の候補領域選択部460は、第3の実施の形態の候補領域選択部460と同様のものである。
【0125】
なお、焦点領域設定部413は、構図データベース441および被写体情報登録部455を外部に設ける構成とすることもできる。
【0126】
また、焦点領域設定部413が優先度設定部450を備える構成としているが、焦点領域設定部413が優先度設定部450を有しない構成とすることもできる。
【0127】
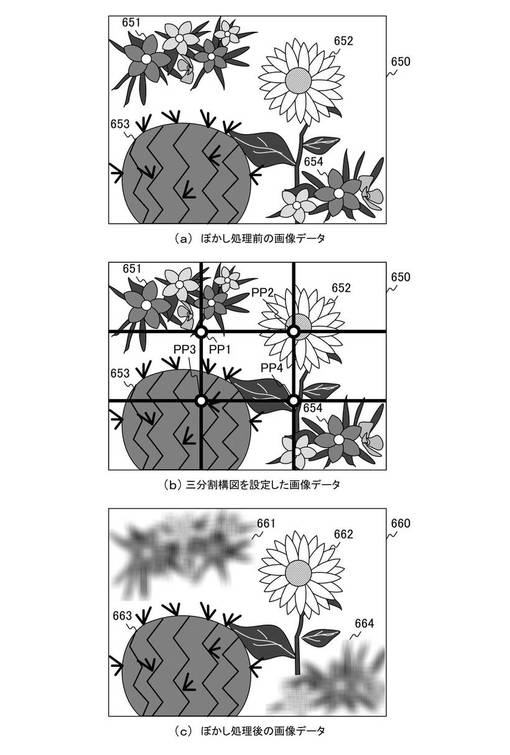
図23は、第5の実施の形態における、三分割構図を設定した場合のぼかし処理の前後の画像データの一例である。図23(a)は、ぼかし処理前の画像データ650の一例である。画像データ650において、被写体651乃至654が撮像されている。図23(b)は、三分割構図を設定した画像データ650の一例である。
【0128】
ここで、三分割構図は、等間隔に引いた2本の水平線と等間隔に引いた2本の垂直線とにより、画像を9等分し、水平線および垂直線の線上または交点上に主要な被写体を配置する構図である。三分割構図の採用により、バランスの取れた芸術的な画像が得られる。
【0129】
構図決定部442は、例えば、三分割構図およびパターン構図のいずれかを選択するものとする。また、被写体651乃至654は、相似形の被写体でないものとする。この場合、パターン構図は適当でないため、三分割構図が選択される。この三分割構図において、交点PP1乃至PP4が設定される。図23(b)に示すように、被写体651および654は、いずれの交点上にも配置されていない。一方、被写体652は交点PP2上に配置され、被写体653は交点PP3上に配置されている。このため、被写体652および653が、構図上、主要な被写体と判断され、焦点領域に設定される。
【0130】
図23(c)は、ぼかし処理後の画像データ660の一例である。画像データ660における被写体661乃至664は、ぼかし処理前の画像データ650における被写体651乃至654に対応する被写体である。被写体652および653が焦点領域に設定されたため、それらに対応する被写体662および663にはぼかし処理が実行されない。一方、それ以外の被写体661および664には、奥行差分最小値に応じた度合いのぼかし処理が実行される。
【0131】
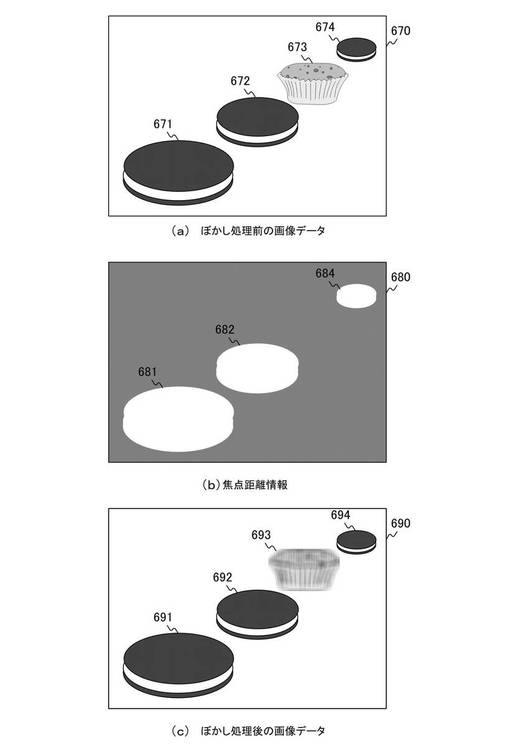
図24は、第5の実施の形態における、パターン構図を設定した場合のぼかし処理の前後の画像データおよび焦点領域情報の一例である。図24(a)は、ぼかし処理前の画像データ670の一例である。画像データ670において、被写体671乃至674が撮像されている。
【0132】
ここで、パターン構図は、画像において規則的に配置された相似形の被写体を主要な被写体とする構図である。パターン構図の採用により、リズム感のある画像が得られる。例えば、図24(a)において、被写体671乃至674は、規則的に配置されている。また、被写体671、672、および、674は、相似形の被写体である。この場合、規則的に並んだ相似形の被写体671、672、および、674が存在するために、パターン構図が選択される。そして、これらの被写体671、672、および、674が構図上、主要な被写体であると判断されて、焦点領域に設定される。
【0133】
図24(b)は、焦点領域情報680の一例である。図24(b)における白い領域の画素値は0であり、灰色の領域の画素値は1である。焦点領域情報680において、焦点領域681、682、および、684は、画像データ670において焦点領域に設定された被写体671、672、および、674に対応する領域である。図24(b)に示すように、これらの焦点領域内の画素の画素値に0が設定され、他の領域の画素値に1が設定されている。
【0134】
図24(c)は、ぼかし処理後の画像データ690の一例である。画像データ690において、被写体691乃至694は、画像データ670における被写体671乃至674に対応するものである。被写体671、672、および、674に焦点領域が設定されたため、それらに対応する被写体691、692、および、694に対しては、ぼかし処理が実行されない。一方、被写体693は、焦点領域に設定されなかったため、奥行差分最小値に応じた度合いのぼかし処理が実行されている。
【0135】
[画像処理装置の動作例]
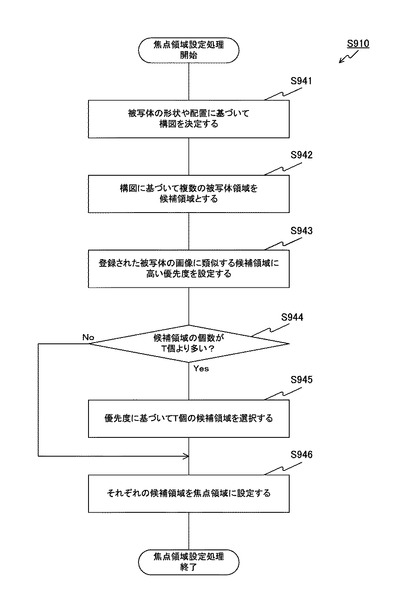
続いて、図25を参照して、第5の実施の形態における画像処理装置の動作例について説明する。図25は、第5の実施の形態における焦点領域設定処理の一例を示すフローチャートである。焦点領域設定部413における構図決定部442は、画像内の被写体の形状や配置に基づいて構図を決定する(ステップS941)。候補領域抽出処理部443は、構図に基づいて複数の被写体領域を候補領域とする(ステップS942)。優先度設定部450は、登録された被写体の画像に類似する候補領域に高い優先度を設定する(ステップS943)。ステップS944乃至S946は、第3の実施の形態におけるステップS923乃至S925と同様の処理である。
【0136】
このように、第5の実施の形態によれば、焦点領域設定部413は、画像処理装置400は、構図を決定して、その構図に基づいて焦点領域を設定する。奥行き情報取得部480は、奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、ユーザが焦点領域を設定しなくとも、画像処理装置400自身が焦点領域を設定することができる。
【0137】
なお、上述の実施の形態は本技術を具現化するための一例を示したものであり、実施の形態における事項と、特許請求の範囲における発明特定事項とはそれぞれ対応関係を有する。同様に、特許請求の範囲における発明特定事項と、これと同一名称を付した本技術の実施の形態における事項とはそれぞれ対応関係を有する。ただし、本技術は実施の形態に限定されるものではなく、その要旨を逸脱しない範囲において実施の形態に種々の変形を施すことにより具現化することができる。
【0138】
また、上述の実施の形態において説明した処理手順は、これら一連の手順を有する方法として捉えてもよく、また、これら一連の手順をコンピュータに実行させるためのプログラム乃至そのプログラムを記憶する記録媒体として捉えてもよい。この記録媒体として、例えば、CD(Compact Disc)、MD(MiniDisc)、DVD(Digital Versatile Disk)、メモリカード、ブルーレイディスク(Blu-ray Disc(登録商標))等を用いることができる。
【0139】
なお、本技術は以下のような構成もとることができる。
(1)被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定部と、
前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得部と、
前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理部と
を具備する画像処理装置。
(2)前記焦点領域設定部は、
前記画像において前記焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出する候補領域抽出部と、
前記抽出された候補領域の中から複数の前記候補領域を選択して前記焦点領域として設定する候補領域選択部と
を備える前記(1)記載の画像処理装置。
(3)前記候補領域抽出部は、前記画像において所定の物体が撮像された領域を認識して前記候補領域として抽出する
前記(2)記載の画像処理装置。
(4)前記候補領域抽出部は、前記画像において顔が撮像された領域を認識して前記候補領域として抽出する
前記(2)または(3)に記載の画像処理装置。
(5)前記候補領域抽出部は、
前記画像において被写体の配置を定義する構図を決定する構図決定部と、
前記決定された構図に基づいて複数の領域を前記候補領域として抽出する候補領域抽出処理部と
を備える前記(2)乃至(4)のいずれかに記載の画像処理装置。
(6)前記焦点領域設定部は、
前記候補領域の選択における優先度を前記抽出された候補領域に設定する優先度設定部をさらに備え、
前記候補領域選択部は、前記設定された優先度に基づいて前記候補領域を選択する
前記(2)乃至(5)に記載の画像処理装置。
(7)前記優先度設定部は、所定の被写体が撮像された画像を登録しておき当該登録しておいた画像と前記候補領域との間の類似性に基づいて前記優先度を前記候補領域に設定する
前記(6)記載の画像処理装置。
(8)前記優先度設定部は、前記候補領域の面積に基づいて前記優先度を設定する
前記(6)または(7)に記載の画像処理装置。
(9)前記優先度設定部は、前記候補領域内のいずれかの画素に対応する前記奥行きに基づいて前記優先度を設定する
前記(6)乃至(9)のいずれかに記載の画像処理装置。
(10)前記奥行き設定部は、前記取得された奥行きのうちの最小または最大の値に対して前記候補領域内のいずれかの画素に対応する前記奥行きが近いほどその候補領域に対して高い優先度を設定する
前記(9)記載の画像処理装置。
(11)前記画像は、前記奥行きの取得において基準とされる基準画像と参照される参照画像とを含み、
前記奥行き取得部は、
前記基準画像内のいずれかの前記画素と当該画素に対応する前記参照画像内の前記画素との間の距離を視差として検出する視差検出部と、
前記検出された視差に基づいて前記基準画像内の前記画素に対応付けて前記奥行きを生成する奥行き生成部とを備え、
前記ぼかし処理部は、前記基準画像内のそれぞれの画素を前記対象画素として前記ぼかし処理を実行する
前記(1)乃至(10)のいずれかに記載の画像処理装置。
(12)前記ぼかし処理部は、
前記ぼかし処理の度合いをδjとし、前記画像を撮像した撮像装置のレンズの有効口径をDとし、前記対象画素に対応する前記奥行きをdjとし、前記最小値をΔdj_minとし、前記画像の撮像倍率をRとして、次式
δj=D×Δdj_min×R/dj
を使用して算出した度合いのぼかし処理を前記対象画素に対して実行する
前記(1)乃至(11)のいずれかに記載の画像処理装置。
(13)前記焦点領域設定部は、前記焦点領域を指定する操作信号に従って前記焦点領域を設定する
前記(1)乃至(12)のいずれかに記載の画像処理装置。
(14)前記焦点領域設定部は、設定する前記焦点領域の個数を閾値以下に制限して前記焦点領域を設定する
前記(1)乃至(13)のいずれかに記載の画像処理装置。
(15)焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
を具備する画像処理装置の制御方法。
(16)焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
をコンピュータに実行させるためのプログラム。
【符号の説明】
【0140】
100、101 撮像装置
150 撮像部
151 基準画像撮像部
152 参照画像撮像部
200 画像データ記憶部
250 奥行き計測部
300 操作部
400、401 画像処理装置
410、411、412、413 焦点領域設定部
420、430、440 候補領域抽出部
421 オブジェクトデータベース
422 物体認識部
431 顔画像データベース
432 顔認識部
441 構図データベース
442 構図決定部
443 候補領域抽出処理部
450 優先度設定部
451 物体情報登録部
452 物体優先度設定部
453 人物情報登録部
454 顔領域優先度設定部
455 被写体情報登録部
456 被写体優先度設定部
460 候補領域選択部
480、481 奥行き情報取得部
482 視差検出部
483 奥行き生成部
490 ぼかし処理部
491 奥行差分絶対値算出部
492 奥行差分最小値選択部
493 フィルタ次数算出部
494 ぼかしフィルタ
500 表示部
【技術分野】
【0001】
本技術は、画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるプログラムに関する。詳しくは、ぼかし処理を実行する画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
近年、撮影対象までの奥行きを測定することができる撮像装置が普及しつつある。奥行きの測定方法としてはDFD(Depth from Defocus)法やステレオマッチング法などがある。DFD法は、画像内の被写体のボケ具合を解析して、ボケ具合と奥行きとの関係に基づいて、その被写体までの奥行きを測定する方法である。ステレオマッチング法は、基準画像および参照画像から視差を検出し、視差と奥行きとの関係に基づいて奥行きを測定する方法である。
【0003】
これらの方法を使用して撮像装置から被写体までの奥行きを測定し、主たる被写体に焦点が合った状態のままで、その被写体の背景において、奥行きに応じた度合いのぼかし処理を施す撮像装置が提案されている(例えば、特許文献1参照。)。奥行きに応じた度合いのぼかし処理により、遠近感が強調された画像が生成される。このようなぼかし処理は、例えば、ポートレート写真の背景において、人物を引き立てる目的で施されることが多い。また、受光面積の小さい撮像素子を備えた撮像装置においては、その撮像素子の特性上、比較的ボケの少ない画像が撮像されるため、遠近感を強調する目的で、このようなぼかし処理がよく用いられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−37767号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述の従来技術では、ぼかし処理において焦点が合った状態を維持すべき領域(以下、「焦点領域」と称する。)を2つ以上設定する場合に、自然な遠近感を表現することができない場合があった。例えば、手前の被写体と、その被写体より奥に位置する被写体との2つの領域を焦点領域に設定し、残りの背景をぼかす場合を想定する。手前の被写体を基準として、手前の被写体からの奥行き方向の距離に応じて背景をぼかすと、ぼかしていない奥の被写体とぼかした背景との間の境界が不自然となってしまう。一方、奥の被写体を基準とした距離に応じて背景をぼかすと、ぼかしていない手前の被写体とぼかした背景との間の境界が不自然となってしまう。このように、複数の焦点領域を設定した場合に、自然な遠近感を表現することができないおそれがあった。
【0006】
本技術はこのような状況に鑑みて生み出されたものであり、複数の焦点領域を設定する場合に、自然な遠近感が表現された画像を生成する技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
本技術は、上述の問題点を解消するためになされたものであり、その第1の側面は、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定部と、上記被写体までの奥行きを上記画像内の画素に対応付けて取得する奥行き取得部と、上記画像内のそれぞれの画素を対象画素として当該対象画素に対応する上記奥行きとそれぞれの上記焦点領域に対応する上記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を上記対象画素に対して実行するぼかし処理部とを具備する画像処理装置、および、その制御方法ならびに当該方法をコンピュータに実行させるためのプログラムである。これにより、対象画素に対応する奥行きと複数の焦点領域のそれぞれに対応する奥行きとの差分の絶対値のうちの最小値に応じた度合いのぼかし処理が、その対象画素に対して実行されるという作用をもたらす。
【0008】
また、この第1の側面において、上記焦点領域設定部は、上記画像において上記焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出する候補領域抽出部と、上記抽出された候補領域の中から複数の上記候補領域を選択して上記焦点領域として設定する候補領域選択部とを備えてもよい。これにより、抽出された候補領域の中から選択された複数の候補領域が焦点領域として設定されるという作用をもたらす。
【0009】
また、この第1の側面において、上記候補領域抽出部は、上記画像において所定の物体が撮像された領域を認識して上記候補領域として抽出することもできる。これにより、物体が撮像された領域が候補領域として抽出されるという作用をもたらす。
【0010】
また、この第1の側面において、上記候補領域抽出部は、上記画像において顔が撮像された領域を認識して上記候補領域として抽出することもできる。これにより、顔が撮像された領域が候補領域として抽出されるという作用をもたらす。
【0011】
また、この第1の側面において、上記候補領域抽出部は、上記画像において被写体の配置を定義する構図を決定する構図決定部と、上記決定された構図に基づいて複数の領域を上記候補領域として抽出する候補領域抽出処理部とを備えてもよい。これにより、決定された構図に基づいて候補領域が抽出されるという作用をもたらす。
【0012】
また、この第1の側面において、上記焦点領域設定部は、上記候補領域の選択における優先度を上記抽出された候補領域に設定する優先度設定部をさらに備え、上記候補領域選択部は、上記設定された優先度に基づいて上記候補領域を選択することもできる。これにより、設定された優先度に基づいて候補領域が選択されるという作用をもたらす。
【0013】
また、この第1の側面において、上記優先度設定部は、所定の被写体が撮像された画像を登録しておき当該登録しておいた画像と上記候補領域との間の類似性に基づいて上記優先度を上記候補領域に設定することもできる。これにより、登録された画像と候補領域との類似性に基づいて優先度が設定されるという作用をもたらす。
【0014】
また、この第1の側面において、上記優先度設定部は、上記候補領域の面積に基づいて上記優先度を設定することもできる。これにより、候補領域の面積に基づいて優先度が設定されるという作用をもたらす。
【0015】
また、この第1の側面において、上記優先度設定部は、上記候補領域内のいずれかの画素に対応する上記奥行きに基づいて上記優先度を設定することもできる。これにより、候補領域内のいずれかの画素に対応する奥行きに基づいて優先度が設定されるという作用をもたらす。
【0016】
また、この第1の側面において、上記奥行き設定部は、上記取得された奥行きのうちの最小または最大の値に対して上記候補領域内のいずれかの画素に対応する上記奥行きが近いほどその候補領域に対して高い優先度を設定することもできる。これにより、奥行きの最大または最小の値に対して、候補領域の奥行きが近いほど、その候補領域に高い優先度が設定されるという作用をもたらす。
【0017】
また、この第1の側面において、上記画像は、上記奥行きの取得において基準とされる基準画像と参照される参照画像とを含み、上記奥行き取得部は、上記基準画像内のいずれかの上記画素と当該画素に対応する上記参照画像内の上記画素との間の距離を視差として検出する視差検出部と、上記検出された視差に基づいて上記基準画像内の上記画素に対応付けて上記奥行きを生成する奥行き生成部とを備え、上記ぼかし処理部は、上記基準画像内のそれぞれの画素を上記対象画素として上記ぼかし処理を実行することもできる。これにより、検出された視差に基づいて奥行きが生成されるという作用をもたらす。
【0018】
また、この第1の側面において、上記ぼかし処理部は、上記ぼかし処理の度合いをδjとし、上記画像を撮像した撮像装置のレンズの有効口径をDとし、上記対象画素に対応する上記奥行きをdjとし、上記最小値をΔdj_minとし、上記画像の撮像倍率をRとして、次式
δj=D×Δdj_min×R/dj
を使用して算出した度合いのぼかし処理を上記対象画素に対して実行することもできる。これにより、ぼかし処理の度合いが上式から算出されるという作用をもたらす。
【0019】
また、この第1の側面において、上記焦点領域設定部は、上記焦点領域を指定する操作信号に従って上記焦点領域を設定することもできる。これにより、操作信号に従って焦点領域が設定されるという作用をもたらす。
【0020】
また、この第1の側面において、上記焦点領域設定部は、設定する上記焦点領域の個数を閾値以下に制限して上記焦点領域を設定することもできる。これにより、設定する上記焦点領域の個数を閾値以下に制限されるという作用をもたらす。
【発明の効果】
【0021】
本技術によれば、複数の焦点領域を設定する場合に、自然な遠近感が表現された画像を生成することができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0022】
【図1】第1の実施の形態における撮像装置の一構成例を示すブロック図である。
【図2】第1の実施の形態における画像データおよび奥行き情報の一例を示す図である。
【図3】第1の実施の形態における焦点領域の設定方法の一例を説明するための図である。
【図4】第1の実施の形態における奥行き情報、奥行き、および、奥行差分絶対値の一例を示す図である。
【図5】第1の実施の形態における画像処理装置の一構成例を示すブロック図である。
【図6】第1の実施の形態における奥行差分絶対値の一例を示す図である。
【図7】第1の実施の形態におけるフィルタ次数の一例を示す図である。
【図8】第1の実施の形態におけるぼかし処理後の画像データの一例を示す図である。
【図9】第1の実施の形態における画像処理装置の動作の一例を示すフローチャートである。
【図10】第1の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【図11】第1の実施の形態におけるぼかし処理の一例を示すフローチャートである。
【図12】第2の実施の形態における撮像装置の一構成例を示すブロック図である。
【図13】第2の実施の形態における画像処理装置の一構成例を示すブロック図である。
【図14】第2の実施の形態における奥行き情報取得部の一構成例を示すブロック図である。
【図15】第2の実施の形態における視差と奥行きとの関係を示す図である。
【図16】第2の実施の形態における画像処理装置の動作の一例を示すフローチャートである
【図17】第3の実施の形態における焦点領域設定部の一構成例を示すブロック図である。
【図18】第3の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【図19】第4の実施の形態における焦点領域設定部の一構成例を示すブロック図である。
【図20】第4の実施の形態におけるぼかし処理の前後の画像データの一例を示す図である。
【図21】第4の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【図22】第5の実施の形態における焦点領域設定部の一構成例を示すブロック図である。
【図23】第5の実施の形態における、三分割構図を設定した場合のぼかし処理の前後の画像データおよび焦点領域情報の一例である。
【図24】第5の実施の形態における、パターン構図を設定した場合のぼかし処理の前後の画像データの一例である。
【図25】第5の実施の形態における焦点領域設定処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下、本技術を実施するための形態(以下、実施の形態と称する)について説明する。説明は以下の順序により行う。
1.第1の実施の形態(画像処理:複数の焦点領域を設定する例)
2.第2の実施の形態(画像処理:ステレオマッチングを使用する例)
3.第3の実施の形態(画像処理:物体認識を行う例)
4.第4の実施の形態(画像処理:顔認識を行う例)
5.第5の実施の形態(画像処理:構図に基づいて焦点領域を選択する例)
【0024】
<1.第1の実施の形態>
[撮像装置の構成例]
図1は、本技術の第1の実施の形態における撮像装置100の一構成例を示すブロック図である。撮像装置100は、被写体を撮像して、撮像した被写体の画像に対してぼかし処理を実行するものである。撮像装置100は、撮像部150、画像データ記憶部200、奥行き計測部250、操作部300、画像処理装置400、および、表示部500を備える。
【0025】
撮像部150は、被写体を撮像して画像データを生成するものである。撮像部150は、生成した画像データを画像データ記憶部200に信号線155を介して出力する。
【0026】
画像データ記憶部200は、画像データを記憶するものである。詳細には、画像データ記憶部200は、撮像部150および画像処理装置400のそれぞれが生成した画像データを記憶する。
【0027】
奥行き計測部250は、被写体までの奥行きを計測するものである。例えば、奥行き計測部250は、画像内の被写体のボケ具合を解析し、ボケ具合と奥行きとの関係に基づいて、その被写体までの奥行きを求めるDFD法を使用して、奥行きを計測する。奥行き計測部250は、画像内のそれぞれの画素に対応付けて奥行きを計測し、それらの奥行きを示す奥行き情報を生成する。奥行き計測部250は、生成した奥行き情報を画像処理装置400に信号線251を介して出力する。なお、奥行き計測部250は、DFD法以外の方法を使用して奥行きを計測することもできる。例えば、奥行き計測部250は、被写体にレーザ光を照射して、照射時刻に対する反射光の遅延時間に基づいて奥行きを計測するレーザ計測法を使用することもできる。
【0028】
操作部300は、撮像装置100を操作する操作信号を検出するものである。この操作信号は、画像内において複数の焦点領域を指定するための操作信号を含む。操作部300は、検出した操作信号を画像処理装置400に信号線301を介して出力する。
【0029】
画像処理装置400は、画像データに対して、ぼかし処理を行うことにより、遠近感が強調された画像データを生成するものである。具体的には、画像処理装置400は、操作信号に従って画像内に複数の焦点領域を設定する。また、画像処理装置400は、奥行き計測部250により生成された奥行き情報を取得する。そして、画像処理装置400は、画像内のそれぞれの画素を対象画素Pjとして、対象画素ごとに、その対象画素の奥行きと複数の焦点領域のそれぞれの奥行きとの差分絶対値を奥行差分絶対値Δdj_fmとして算出する。ここで、jは、画像内の画素を識別するための番号であり、0乃至N−1の整数である。Nは、画像内の全画素を示す値であり、水平方向の画素数に垂直方向の画素数を乗算した値になる。mは、焦点領域を識別するための番号であり、0乃至M−1の整数である。Mは、設定された焦点領域の個数であり、2以上の整数である。したがって、M個の焦点領域が設定された場合、画像内の画素ごとに、M個の奥行差分絶対値が算出される。
【0030】
対象画素ごとにM個の奥行差分絶対値を算出した後、画像処理装置400は、対象画素ごとに、それらの奥行差分絶対値の最小値を奥行差分最小値Δdj_minとして選択する。したがって、全画素数Nの画像において合計でN個の奥行差分最小値が選択される。
【0031】
奥行差分最小値Δdj_minを選択した後、画像処理装置400は、それぞれの対象画素について、奥行差分最小値Δdj_minに応じたぼかし処理の度合いを算出する。ぼかし処理の度合いを算出する式の具体例については後述する。
【0032】
画像処理装置400は、算出したフィルタ次数に従って、画像データに対してぼかし処理を実行する。画像処理装置400は、ぼかし処理を実行した画像データを画像データ記憶部200に信号線405を介して出力する。
【0033】
表示部500は、画像データ記憶部200から画像データを読み出して表示するものである。
【0034】
図2は、第1の実施の形態における画像データおよび奥行き情報の一例を示す図である。図2(a)は、画像処理装置400に入力された画像データ600の一例である。画像データ600において、例えば、車および運転手からなる被写体601と、木の被写体602および603と、家の被写体604とが撮像されている。
【0035】
図2(b)は、画像データ600と同期して取得された奥行き情報610の一例を示す図である。奥行き情報610は、それぞれの画素における被写体の奥行きを画素値により示すデータである。例えば、奥行き情報610において奥行きを示す画素値として輝度値が設定され、奥行きが小さいほど、低い輝度値が設定される。奥行き情報610は、画像データ600における被写体601乃至604に対応する被写体611乃至614の奥行き情報を含む。ここで、被写体611乃至614、および、それらの背景のうちの被写体611の奥行きが最も小さく、被写体612、被写体613、被写体614、背景の順に奥行きが大きいものとする。この場合、奥行き情報610において、最も手前の被写体611の輝度値が最も低く設定される。そして、被写体612、被写体613、被写体614、それらの背景の順に奥行きに応じて輝度値が高くなるように設定される。なお、奥行き情報610において、奥行きが小さいほど、高い輝度値が設定されるようにしてもよい。
【0036】
図3は、第1の実施の形態における焦点領域の設定方法の一例を説明するための図である。例えば、最初に撮像装置100が画像データ600をタッチパネルに表示し、ユーザによる操作の受付けを開始する。画像データ600のいずれかの画素を、ユーザが指でタッチすることにより指定すると、撮像装置100における画像処理装置400は、その画素を含む被写体の領域を検出する。例えば、画像処理装置400は、画像内の輝度情報の分布を解析することにより、指定された画素を含む被写体の領域を検出する。画像処理装置400は、輝度情報の分布に加え、色情報の分布の解析結果も含めて被写体領域を検出してもよい。画像処理装置400は、検出した被写体の領域を焦点領域として設定する。なお、ユーザが画素の座標を数字キーで入力するなど、タッチパネルを用いずに撮像装置100が焦点領域を設定する構成としてもよい。
【0037】
一例として、被写体601内の画素605と、被写体604内の画素606とが指定された場合を想定する。この場合、画像処理装置400は、指定された画素を含む被写体601および604を検出して焦点領域に設定する。
【0038】
図4は、第1の実施の形態における奥行き情報、奥行き、および、奥行差分絶対値の一例を示す図である。焦点領域が設定されると、画像処理装置400は、画像内のそれぞれの画素を対象画素として、対象画素の奥行きと、複数の焦点領域のそれぞれの奥行きとから、奥行差分絶対値を算出する。例えば、被写体612内の対象画素Pjの奥行差分絶対値を求める場合を考える。この場合、焦点領域として被写体601および604が設定されると、画像処理装置400は、図4(a)に示すように、対象画素Pjの奥行きdjと、それぞれの焦点領域内のいずれかの画素に対応する奥行きd_f0およびd_f1とを取得する。そして、画像処理装置400は、次式から奥行差分絶対値Δdj_f0およびΔdj_f1を算出する。
Δdj_f0=|dj−d_f0| ・・・式1
Δdj_f1=|dj−d_f1| ・・・式2
【0039】
式1および式2から算出された奥行差分絶対値から、画像処理装置400は、対象画素Pjにおけるぼかし処理の度合いδjを算出する。
【0040】
図4(b)は、図4(a)に例示した画像内の被写体の奥行き方向における位置関係の一例を示した図である。より具体的には、図4(a)に写された風景における水平方向に平行な軸をx軸、垂直方向に平行な軸をy軸、奥行き方向に平行な軸をz軸とした場合、図4(b)は、x軸方向から見た風景である。図4(b)に示すように、被写体611に焦点領域f0が設定されたとすると、撮像装置100から被写体611までのz軸上の距離が奥行きd_f0となる。また、被写体614に焦点領域f1が設定されたとすると、撮像装置100から被写体614までのz軸上の距離が奥行きd_f0となる。被写体612上の画素を対象画素Pjとすると、撮像装置100から被写体612までの距離が奥行きdjとなる。この場合、奥行差分絶対値Δdj_f0は、被写体611における撮像装置100に向けた面から、被写体612における撮像装置100に向けた面までの距離である。また、奥行差分絶対値Δdj_f1は、被写体612における撮像装置100に向けた面から、被写体614における撮像装置100に向けた面までの距離である。
【0041】
ここで、焦点領域とされた被写体611および614の撮像装置100に向けた面が平坦でない場合、実際には、その焦点領域内の画素ごとの奥行きに、多少のばらつきが生じる。しかし、通常、そのばらつきの程度は、奥行きの単位と比較すると無視できるほど小さい。このため、画像処理装置400は、焦点領域内のいずれかの画素(例えば、指定された画素605および606)に対応する奥行きを、その焦点領域に対応する奥行きとして取得している。
【0042】
[画像処理装置の構成例]
図5は、第1の実施の形態における画像処理装置400の一構成例を示すブロック図である。画像処理装置400は、焦点領域設定部410、奥行き情報取得部480、および、ぼかし処理部490を備える。
【0043】
焦点領域設定部410は、操作信号に従って、複数の焦点領域f0乃至f(M−1)を設定するものである。焦点領域設定部410は、設定した焦点領域を示す焦点領域情報をぼかし処理部490に信号線415を介して出力する。この焦点領域情報は、例えば、焦点領域ごとに焦点領域の輪郭の画素群の座標を含む。なお、焦点領域情報は、焦点領域内の全画素の座標を含む情報であってもよい。また、焦点領域情報は、焦点領域における画素値を2値のうちの一方の値(例えば、「1」)に、それ例外の領域における画素値を他方の値(例えば、「0」)に設定した画像データであってもよい。この画像データには、設定された焦点領域のそれぞれを識別する識別情報が付加される。識別情報は、例えば、ユーザにより指定された画像内の画素の座標と、その座標に対応する焦点領域の番号(0乃至M−1)とを含む。
【0044】
なお、焦点領域設定部410は、輝度値の分布から、指定された画素を含む被写体の領域を検出しているが、他の方法を使用して被写体を検出することもできる。例えば、焦点領域設定部410は、奥行き情報を参照して、指定された画素に対応する奥行きとの差分が所定値以下の奥行きの画素群を被写体の領域として検出してもよい。また、焦点領域設定部410は、エッジ検出を実行して、指定された画素を含む被写体の輪郭を抽出することにより、被写体を検出することもできる。
【0045】
また、焦点領域設定部410は、検出した被写体の領域を焦点領域に設定しているが、指定された画素を含む一定面積の図形(円など)内の領域を焦点領域に設定することもできる。
【0046】
また、焦点領域設定部410は、焦点領域の個数を閾値T(Tは、2以上の整数)以下に制限することもできる。この場合、焦点領域設定部410は、焦点領域の個数がT個に達すると、それ以降の焦点領域を指定する操作を受け付けないものとする。
【0047】
奥行き情報取得部480は、奥行き計測部250が生成した奥行き情報を取得するものである。奥行き情報取得部480は、取得した奥行き情報をぼかし処理部490に信号線485を介して出力する。なお、奥行き情報取得部480は、特許請求の範囲に記載の奥行き取得部の一例である。
【0048】
ぼかし処理部490は、画像データに対してぼかし処理を実行するものである。ぼかし処理部490は、奥行差分絶対値算出部491、奥行差分最小値選択部492、フィルタ次数算出部493、および、ぼかしフィルタ494を備える。
【0049】
奥行差分絶対値算出部491は、焦点領域情報および奥行き情報に基づいて、画像内のそれぞれの対象画素Pj(jは0乃至N−1)について、奥行差分絶対値Δdj_f0乃至Δdj_f(M−1)を算出するものである。奥行差分絶対値算出部491は、算出した奥行差分絶対値を奥行差分最小値選択部492に出力する。
【0050】
奥行差分最小値選択部492は、画像内のそれぞれの対象画素について、奥行差分最小値Δdj_minを選択するものである。奥行差分最小値選択部492は、選択した奥行差分最小値をフィルタ次数算出部493に出力する。
【0051】
フィルタ次数算出部493は、画像内のそれぞれの対象画素Pjについて、フィルタ次数δjを算出するものである。フィルタ次数算出部493は、例えば、以下の式3からぼかし処理の度合いを算出する。ただし、以下の式3において、δjは、対象画素Pjのぼかし処理の度合いであり、例えば、ぼかしフィルタのフィルタ次数である。設定されたフィルタ次数に応じて、ぼかし量が増減する。また、Δdj_minは対象画素Pjの奥行差分最小値であり、単位は例えば[m]である。Aは、Δdj_minの値をδjに換算するための係数である。
δj=A・Δdj_min・・・式3
【0052】
なお、フィルタ次数算出部493は、式3の代わりに、次式を使用して、ぼかし処理の度合いδjを算出することもできる。ただし、次式において、Dは、撮像装置100のレンズの有効口径であり、単位は例えば[mm]である。djは、対象画素Pjの奥行きである。「R」は、画像データの撮像倍率である。Cは、D、Δdj_min、dj、および、Rにより求められる、ぼかし量をフィルタ次数δjに変換するための係数である。画像処理装置400は、式3または次式を使用して、画像内の全画素について、フィルタ次数を算出する。次式を使用した場合、実際の光学系の特性に即したぼかし量が算出される。フィルタ次数算出部493は、算出したフィルタ次数δjをぼかしフィルタ494に出力する。
【数1】
【0053】
ぼかしフィルタ494は、フィルタ次数δjに従って、画像データに対してぼかし処理を実行するものである。ぼかしフィルタ494は、例えば、平滑化フィルタの一種のガウシアンフィルタであり、例えば、次式からぼかし処理後における画素(x,y)の画素値I'(x,y)を算出する。ただし、以下の式5におけるI(x+k,y+l)は、ぼかし処理前の画素(x+k,y+l)の画素値である。rは、ガウシアンフィルタの半径であり、0以上の整数である。w(k,l)は、画素値I(x+k,y+l)に乗算すべき重み係数である。また、以下の式6におけるσは標準偏差であり、所定の実数が設定される。以下の式5および式6により、ガウシアンフィルタの中心に近いほど高く、周辺に近いほど小さい重み係数が設定される。以下の式7における「round()」は、かっこ内の数値に対して所定の端数処理を実行して0以上の整数値を返す関数である。例えば、端数処理として、小数点以下を四捨五入する演算が実行される。
【数2】
【数3】
r=round(δj/2) ・・・式7
【0054】
なお、ぼかし処理部490は、ぼかし処理の度合いとして、ガウシアンフィルタのフィルタ次数を算出しているが、フィルタ次数以外のパラメータをぼかし処理の度合いとして算出してもよい。例えば、ぼかし処理部490は、ぼかし処理の度合いとして、標準偏差σを算出することもできる。
【0055】
また、ぼかし処理部490は、ガウシアンフィルタを使用してぼかし処理を実行しているが、移動平均フィルタなど、ガウシアンフィルタ以外のぼかしフィルタを使用することもできる。
【0056】
また、画像処理装置400を撮像装置100の内部に設ける構成としているが、画像処理装置400を外部に設けて撮像装置100と画像処理装置400とを別々の装置とすることもできる。
【0057】
図6は、第1の実施の形態における奥行差分絶対値の一例を示す図である。焦点領域f0、f1、および、f2を含む複数の焦点領域が設定された場合を考える。焦点領域f0、f1、および、f2に対応する奥行きは、それぞれ10m、30m、および、20mであるものとする。ここで、画素P0(0,0)に対応する奥行きが12mであるとき、焦点領域f0の奥行きとの間の奥行差分絶対値は2mである。また、焦点領域f1およびf2の奥行きとの間の奥行差分絶対値は、18mおよび8mである。これらの奥行差分絶対値のうち、最小値である2mが、画素P0における奥行差分最小値として選択される。
【0058】
同様の方法で、画素P100(100,0)に対応する奥行きが16mであるとき、4mが、その画素における奥行差分最小値として選択される。また、画素P200(200,0)に対応する奥行きが36mであるとき、6mがその画素における奥行差分最小値として選択される。画素PN−1(W−1,H−1)に対応する奥行きが10.2mであるとき、0.2mが、その画素における奥行差分最小値として選択される。ここで、Wは、画像の水平方向における全画素数であり、1以上の整数である。Hは、画像の垂直方向における全画素数であり、1以上の整数である。このように、画像内のそれぞれの画素について、設定された焦点領域ごとに奥行差分絶対値が算出される。そして、画素ごとに、それらの奥行差分絶対値の中の最小値が奥行差分最小値として選択される。
【0059】
図7は、第1の実施の形態におけるフィルタ次数の一例を示す図である。上述の式3において、係数Aとして2が設定された場合を考える。この場合、画素P0の奥行差分最小値が2mであれば、式3より、フィルタ次数として「4」が算出される。同様に、画素P100およびP200の奥行差分最小値が4mおよび6mであれば、式3より、フィルタ次数として「8」および「12」が算出される。画素PN-1の奥行差分最小値が0.2mであれば、式3よりフィルタ次数として0.4が算出される。
【0060】
図8は、第1の実施の形態におけるぼかし処理後の画像データ620の一例を示す図である。画像データ620における被写体621乃至624は、図2(a)に例示した平価捕まえの画像データ600における被写体601乃至604に対応する被写体である。被写体621および624が焦点領域として設定されたものとする。また、被写体621乃至624のうちの被写体621の奥行きが最も小さく、被写体622、被写体623、被写体624の順に奥行きが大きくなるものとする。被写体622および623は、奥行き方向において被写体624よりも被写体621に近いものとする。また、被写体622は、被写体623よりも被写体621に近いものとする。
【0061】
この場合、奥行き方向において、手前にある焦点領域(被写体621)から奥に向かうほど、ぼかし処理の度合いが大きくなる。そして、奥行き方向において手前の焦点領域(被写体621)と奥の焦点領域(被写体624)の中間付近でぼかし処理の度合いが最も大きくなる。奥行き方向において、その中間付近を越えて、奥の焦点領域(被写体624)に近づくほど、ぼかし処理の度合いが小さくなる。例えば、奥行き方向において被写体622は、被写体623よりも、焦点領域が設定された被写体621に近いため、被写体622に対するぼかし処理の度合いは、被写体623よりも小さくなる。このように、複数の焦点領域が設定された場合であっても、奥行き方向において最も近い焦点領域からの奥行きに応じてぼかし処理の度合いが変更されるため、自然な遠近感が得られる。
【0062】
[画像処理装置の動作例]
続いて、図9乃至図11を参照して、第1の実施の形態における画像処理装置400の動作例について説明する。図9は、第1の実施の形態における画像処理装置400の動作の一例を示すフローチャートである。この動作は、撮像された画像データが画像処理装置400に入力されたときに開始する。画像処理装置400は、複数の焦点領域を設定するための焦点領域設定処理を実行する(ステップS910)。画像処理装置400は、奥行き計測部250からの奥行き情報を取得する(ステップS950)。画像処理装置400は、画像データをぼかすためのぼかし処理を実行する(ステップS960)。ステップS960の後、画像処理装置400は、ぼかし処理後の画像データを生成するための動作を終了する。
【0063】
図10は、第1の実施の形態における焦点領域設定処理の一例を示すフローチャートである。画像処理装置400における焦点領域設定部410は、変数iを0に初期化し(ステップS911)、焦点領域を設定するための操作の受付を開始する(ステップS912)。そして、焦点領域設定部410は、いずれかの画素が、焦点領域内の画素として選択されたか否かを判断する(ステップS913)。
【0064】
いずれかの画素が選択されたのであれば(ステップS913:Yes)、焦点領域設定部410は、選択された画素を含む被写体の領域を焦点領域fiの候補として一時記憶する(ステプS914)。焦点領域設定部410は、変数iに1を加算する(ステップS915)。
【0065】
画素が選択されていない場合(ステップS913:No)、またはステップS915の後、焦点領域設定部410は、画素の選択が確定されたか否かを判断する(ステップS916)。選択が確定されていなければ(ステップS916:No)、焦点領域設定部410は、ステップS913に戻る。選択が確定されたのであれば(ステップS916:Yes)、焦点領域設定部410は、それぞれの候補を焦点領域として設定する(ステップS917)。ステップS917の後、焦点領域設定部410は、焦点領域設定処理を終了する。
【0066】
図11は、第1の実施の形態におけるぼかし処理の一例を示すフローチャートである。画像処理装置400におけるぼかし処理部490は、まず、全ての焦点領域の奥行きd_f0乃至d_f(M−1)を取得する(ステップS961)。ぼかし処理部490は、変数mおよびnを0に初期化して、ループ処理を開始する。このループ処理において、ぼかし処理部490は、後述するステップS963乃至968を実行してmまたはnを1つ増分する。増分後にm>W−1かつn>H−1であればループ処理を終了し、そうでなければステップS963に戻り、ループ処理を継続する(ステップS962)。
【0067】
ぼかし処理部490は、画素(m,n)を対象画素Pjとする(ステップSS963)。ぼかし処理部490は、対象画素Pjの奥行きdjを取得する(ステップS964)。ぼかし処理部490は、対象画素Pjの奥行きdjと、焦点領域の奥行きd_f0乃至d_f(M−1)とから、奥行差分絶対値Δdj_f0乃至Δdj_f(M−1)を算出する(ステップS965)。ぼかし処理部490は、算出した奥行差分絶対値Δdj_f0乃至Δdj_f(M−1)のうちの最小値を対象画素Pjの奥行差分最小値Δdj_minとして選択する(ステップS966)。ぼかし処理部490は、選択した奥行差分最小値Δdj_minから、上述の式3を使用して対象画素Pjのフィルタ次数δjを算出する(ステップS967)。ぼかし処理部490は、算出したフィルタ次数に従って、上述の式5および式6を使用して、ぼかし処理後の対象画素Pjの画素値を算出する(ステップS968)。
【0068】
ループ処理(ステップS962)の終了後、ぼかし処理部490は、ぼかし処理を終了する。
【0069】
このように、第1の実施の形態によれば、焦点領域設定部410が複数の焦点領域を設定する。また、奥行き情報取得部480が、画素に対応づけて奥行きを取得する。ぼかし処理部490は、画像内の画素ごとに、画素の奥行きと焦点領域のそれぞれに対応する奥行きとの間のそれぞれの差分の絶対値を奥行差分最小値として算出する。そして、ぼかし処理部490は、奥行差分絶対値のうちの最小値を奥行差分最小値として画素ごとに選択する。ぼかし処理部490は、奥行差分最小値からフィルタ次数を算出し、そのフィルタ次数に従ってぼかし処理を実行する。これにより、奥行き方向において被写体に最も近い焦点領域からの距離に応じて、その被写体のぼかし処理の度合いが変更される。この結果、複数の焦点領域が設定された場合において自然な遠近感を表わす画像が生成される。
【0070】
<2.第2の実施の形態>
[撮像装置の構成例]
次に、図12乃至16を参照して、本技術の第2の実施の形態について説明する。図12は、第2の実施の形態における撮像装置101の一構成例を示すブロック図である。撮像装置101は、ステレオマッチング法により奥行き情報を生成する点において第1の実施の形態の撮像装置100と異なる。ステレオマッチング法の詳細については後述する。撮像装置101は、撮像部150の代わりに基準画像撮像部151および参照画像撮像部152を備え、画像処理装置400の代わりに画像処理装置401を備え、奥行き計測部250を有しない点において撮像装置100と異なる。
【0071】
基準画像撮像部151は、基準画像を撮像するものである。ここで、基準画像は、奥行きの算出において基準とされる画像である。例えば、撮像装置101の右側のレンズで撮像された右画像と左側のレンズで撮像された左画像とのうちの、いずれかが基準画像とされる。基準画像撮像部151は、撮像した基準画像を示す基準画像データを画像データ記憶部200に信号線155を介して出力する。
【0072】
参照画像撮像部152は、参照画像を撮像するものである。ここで、参照画像は、基準画像と同期して撮像された画像であり、奥行きの算出において参照される画像である。例えば、右画像および左画像のうちの、基準画像以外の画像が参照画像とされる。参照画像撮像部152は、撮像した参照画像を示す参照画像データを画像データ記憶部200に信号線156を介して出力する。
【0073】
画像処理装置401は、画像データ記憶部200から、基準画像データおよび参照画像データを読み出す。画像処理装置401は、基準画像データおよび参照画像データからステレオマッチング法を使用して、画素に対応付けて奥行きを算出する。画像処理装置401は、算出した奥行きに基づいて、基準画像に対してぼかし処理を実行する。
【0074】
[画像処理装置の構成例]
続いて、図13を参照して、第2の実施の形態における画像処理装置の構成例について説明する。図13は、第2の実施の形態における画像処理装置401の一構成例を示すブロック図である。画像処理装置401は、奥行き情報取得部480の代わりに奥行き情報取得部481を備える点において第1の実施の形態の画像処理装置400と異なる。
【0075】
図14は、第2の実施の形態における奥行き情報取得部481の一構成例を示すブロック図である。奥行き情報取得部481は、視差検出部482および奥行き生成部483を備える。
【0076】
視差検出部482は、基準画像および参照画像から視差を検出するものである。具体的には、視差検出部482は、画像データ記憶部200から、基準画像データおよび参照画像データを読み出す。視差検出部482は、基準画像内のいずれかの画素を対象点とし、参照画像内において、その対象点と対応する対応点を求める。視差検出部482は、対象点の水平座標と、対応点の水平座標との間の差分の絶対値を視差として検出する。視差検出部482は、基準画像内の全ての画素について、視差を検出して奥行き生成部483に出力する。
【0077】
奥行き生成部483は、視差から奥行き情報を生成するものである。視差から奥行きを求める方法については、後述する。奥行き生成部483は、画像内のそれぞれの画素に対応付けて奥行きを求め、奥行き情報を生成する。奥行き生成部483は、奥行き情報をぼかし処理部490に出力する。
【0078】
図15は、第2の実施の形態における視差と奥行きとの関係の一例を示す図である。基準画像における対象点の水平座標をXRとし、参照画像における対応点の水平座標をXLとする。この場合、視差pは次式により算出される。
p=|XR−XL| ・・・式8
【0079】
また、基準画像撮像部151と参照画像撮像部152とのそれぞれのレンズ間の間隔をBとし、焦点距離をFとする。この場合、対象点(XR)、対応点(XL)、および、被写体がなす三角形と、基準画像撮像部151のレンズ、参照画像撮像部152のレンズ、および、被写体がなす三角形とは相似である。このため、その被写体までの奥行きをdとすると、次式に示す関係式が成立する。
p:F=B:d ・・・式9
【0080】
式9を変形することにより、次式が得られる。
d=B×F/p ・・・式10
【0081】
BおよびFは、既知の値であるから、検出された視差pを式10に代入することにより、奥行きdが算出される。
【0082】
[画像処理装置の動作例]
続いて、図16を参照して、第2の実施の形態における画像処理装置401の動作例について説明する。図16は、第2の実施の形態における画像処理装置401の動作の一例を示すフローチャートである。画像処理装置401の動作は、ステップS950の代わりにステップS951およびS952を実行する点において第1の実施形態の画像処理装置400の動作と異なる。
【0083】
画像処理装置401は、基準画像および奥行き画像から視差pを検出する(ステップS951)。そして、画像処理装置401は、式10に基づいて視差pから奥行きdを算出して奥行き情報を生成する(ステップS952)。
【0084】
このように、本技術の第2の実施の形態によれば、焦点領域設定部410が焦点領域を設定し、奥行き情報取得部481は、基準画像および参照画像から視差を検出し、その視差に基づいて奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、画像処理装置401自身が奥行き情報を生成することができる。
【0085】
<3.第3の実施の形態>
[画像処理装置の構成例]
次に、図17および図18を参照して、本技術の第3の実施の形態について説明する。図17は、第3の実施の形態における焦点領域設定部411の一構成例を示すブロック図である。焦点領域設定部411は、画像内の複数の物体を認識して、それらの物体の領域を焦点領域に設定する点において第1の実施の形態の焦点領域設定部410と異なる。焦点領域設定部411は、候補領域抽出部420、優先度設定部450、および、候補領域選択部460を備える。
【0086】
候補領域抽出部420は、画像において焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出するものである。候補領域抽出部420は、オブジェクトデータベース421および物体認識部422を備える。
【0087】
オブジェクトデータベース421は、認識対象の物体を認識するための情報を記憶するデータベースである。例えば、オブジェクトデータベース421は、認識対象の物体について学習した画像データ、物体のカテゴリ、物体の特徴量の情報などを記憶する。
【0088】
物体認識部422は、オブジェクトデータベース421を参照して、画像における複数の物体を認識するものである。物体認識部422は、認識した物体の領域のそれぞれを焦点領域の候補である候補領域とする。物体認識部422は、画像内の候補領域を示す候補領域情報を生成して優先度設定部450および候補領域選択部460に出力する。
【0089】
優先度設定部450は、候補領域の選択における優先度を、それぞれの候補領域に設定するものである。優先度設定部450は、物体情報登録部451および物体優先度設定部452を備える。
【0090】
物体情報登録部451は、選択において優先度を変更すべき物体に関する物体情報を登録するものである。物体情報は、具体的には、物体の画像データや、物体の名称などである。
【0091】
物体優先度設定部452は、候補領域のそれぞれの優先度を設定するものである。例えば、物体優先度設定部452は、登録された物体の画像に類似する候補領域の優先度を、類似しない候補領域よりも高く設定する。なお、物体優先度設定部452は、逆に、登録された物体の画像に類似しない候補領域に高い優先度を設定することもできる。
【0092】
また、物体優先度設定部452は、候補領域の面積に基づいて優先度を設定することもできる。具体的には、物体優先度設定部452は、候補領域の面積が大きいほど、高い優先度を設定する。物体優先度設定部452は、全ての候補領域の面積の平均値を算出して、候補領域の面積が、その平均値に近いほど、高い優先度を設定してもよい。
【0093】
また、物体優先度設定部452は、候補領域に対応する奥行きに基づいて優先度を設定することもできる。この場合、物体優先度設定部452は、奥行きが大きいほど高い優先度を設定してもよいし、奥行きが小さいほど高い優先度を設定してもよい。また、物体優先度設定部452は、画像内の全画素に対応する奥行きの中の最大値および最小値を求め、その最大値または最小値に近い奥行きの物体ほど、高い優先度を設定してもよい。このように手前の物体と奥の物体とが優先されると、奥行き方向において距離の離れた物体に焦点領域が設定されやすくなる。この結果、手前の物体から奥に向かうほど、ぼかしが大きくなり、手前および奥の物体の中間付近でぼかしが最大となり、そこから奥の物体に向かうほどぼかしが小さくなるというぼかし具合が顕著になる。このため、画像において、遠近感がより強調されるようになる。
【0094】
物体優先度設定部452は、設定した優先度を示す優先度情報を候補領域選択部460に出力する。
【0095】
候補領域選択部460は、候補領域情報の示す候補領域の中から複数の候補領域を選択して焦点領域に設定するものである。ただし、候補領域選択部460は、設定する焦点領域の個数を、T(Tは、2以上の整数)個以下に制限する。具体的には、候補領域選択部460は、候補領域の個数がT個以下である場合、全ての候補領域を焦点領域として設定する。候補領域がT個より多い場合、候補領域選択部460は、優先度設定部450が設定した優先度が高い候補領域を優先してT個の候補領域を選択して焦点領域として設定する。候補領域選択部460は、設定した焦点領域を示す焦点領域情報をぼかし処理部490に出力する。
【0096】
なお、焦点領域設定部411がオブジェクトデータベース421を備える構成としているが、焦点領域設定部411がオブジェクトデータベース421を有しない構成とすることもできる。例えば、撮像装置100の外部にオブジェクトデータベースを設置しておき、焦点領域設定部411が、ネットワークを介して、そのオブジェクトデータベースにアクセスする構成とすればよい。同様に、焦点領域設定部411は、物体情報登録部451を外部に設ける構成とすることもできる。
【0097】
また、焦点領域設定部411が優先度設定部450を備える構成としているが、焦点領域設定部411が優先度設定部450を有しない構成とすることもできる。この場合、候補領域選択部460は、焦点領域の個数を制限しないで全ての物体の領域を焦点領域に設定してもよいし、焦点領域の個数をT個に制限してもよい。優先度設定部450を備えずにT個以下に制限する場合において候補領域がT個を超えたのであれば、候補領域選択部460は、無作為にT個の物体領域を選択すればよい。
【0098】
[画像処理装置の動作例]
続いて、図18を参照して、第3の実施の形態における画像処理装置の動作例について説明する。図18は、第3の実施の形態における焦点領域設定処理の一例を示すフローチャートである。焦点領域設定部411における物体認識部422は、オブジェクトデータベース421を参照して画像内の物体を認識して、その領域を候補領域とする(ステップS921)。優先度設定部450は、登録された物体の画像に類似する候補領域に高い優先度を設定する(ステップS922)。候補領域選択部460は、候補領域の個数がT個より多いか否かを判断する(ステップS923)。候補領域の個数がT個より多ければ(ステップS923:Yes)、候補領域選択部460は、優先度に基づいてT個の候補領域を選択する(ステップS924)。
【0099】
候補領域の個数がT個以下である場合(ステップS923:No)、または、ステップS924の後、候補領域選択部460は、それぞれの候補領域を焦点領域として設定する(ステップS925)。ステップS925の後、焦点領域設定部411は、焦点領域設定処理を終了する。
【0100】
このように、第3の実施の形態によれば、焦点領域設定部411は、画像内の物体を認識して、その物体の領域を焦点領域に設定する。奥行き情報取得部480は、奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、ユーザが焦点領域を設定しなくとも、画像処理装置400自身が焦点領域を設定することができる。
【0101】
<4.第4の実施の形態>
[画像処理装置の構成例]
次に、図19乃至21を参照して、本技術の第4の実施の形態について説明する。図19は、第4の実施の形態における焦点領域設定部412の一構成例を示すブロック図である。焦点領域設定部412は、画像内の複数の顔を認識して、それらの顔の領域を焦点領域に設定する点において第1の実施の形態の焦点領域設定部410と異なる。焦点領域設定部412は、候補領域抽出部430、優先度設定部450、および、候補領域選択部460を備える。
【0102】
第4の実施の形態の候補領域抽出部430は、物体の代わりに顔を認識する点において、第3の実施の形態の候補領域抽出部420と異なる。候補領域抽出部430は、顔画像データベース431および顔認識部432を備える。
【0103】
顔画像データベース431は、画像における顔を認識するため情報を記憶するデータベースである。顔画像データベース431は、例えば、様々な人物の顔画像データ、顔のパーツの特徴を数値化したデータ、および、それらの人物の性別や年齢などのメタデータを記憶する。
【0104】
顔認識部432は、顔画像データベース431を参照して、画像における複数の顔を認識するものである。顔認識部432は、認識した、それぞれの顔の領域を候補領域とする。
【0105】
第3の実施の形態の優先度設定部450は、特定の人物の顔画像に類似する候補領域を優先する点において第3の実施の形態の優先度設定部450と異なる。第4の実施の形態における優先度設定部450は、人物情報登録部453および顔領域優先度設定部454を備える。
【0106】
人物情報登録部453は、選択において優先度を変更したい人物に関する人物情報を登録するものである。人物情報は、具体的には、特定の人物の顔画像データ、その人物の性別や年齢などのメタデータなどである。
【0107】
顔領域優先度設定部454は、候補領域のそれぞれの優先度を設定するものである。例えば、顔領域優先度設定部454は、登録された人物を認識して、認識した人物の顔画像に類似する候補領域の優先度を、それ以外の候補領域よりも高く設定する。
【0108】
第4の実施の形態の候補領域選択部460は、第3の実施の形態の候補領域選択部460と同様のものである。
【0109】
なお、焦点領域設定部412は、顔画像データベース431および人物情報登録部453を外部に設ける構成とすることもできる。
【0110】
また、焦点領域設定部412が優先度設定部450を備える構成としているが、焦点領域設定部412が優先度設定部450を有しない構成とすることもできる。
【0111】
また、優先度設定部450は、登録された人物の顔画像に類似する候補領域に高い優先度を設定しているが、逆に、登録された人物の顔画像に類似する候補領域の優先度を低く設定することもできる。
【0112】
図20は、第4の実施の形態におけるぼかし処理の前後の画像データの一例を示す図である。図20(a)は、ぼかし処理前の画像データの一例である。この画像データは、顔領域631および633と、木の被写体632および634とを含む。焦点領域設定部412は、顔領域631および633を認識し、これらの顔領域を焦点領域に設定する。そして、ぼかし処理部490は、奥行差分最小値に応じた度合いのぼかし処理を実行する。
【0113】
図20(b)は、ぼかし処理後の画像データの一例である。顔領域631および633に対応する顔領域を含む被写体641および643には、ぼかし処理が実行されていない。被写体641は顔以外に胴体を含み、被写体643は顔以外に胴体および車を含むが、これらの胴体および車は、顔と奥行きがほぼ同じであるため、ぼかし処理が実行されない。一方、木の被写体632および632に対応する被写体642および644には、奥行差分最小値に応じた度合いのぼかし処理が実行されている。
【0114】
[画像処理装置の動作例]
続いて、図21を参照して、第4の実施の形態における画像処理装置400の動作例について説明する。図21は、第4の実施の形態における焦点領域設定処理の一例を示すフローチャートである。焦点領域設定部412における顔認識部432は、顔画像データベース431を参照して画像内の顔領域を認識して候補領域とする(ステップS931)。優先度設定部450は、登録された人物の顔画像に類似する候補領域に高い優先度を設定する(ステップS932)。ステップS933乃至S935は、第3の実施の形態におけるステップS923乃至S925と同様の処理である。
【0115】
このように、第4の実施の形態によれば、焦点領域設定部412は、画像処理装置400は、画像内の顔領域を認識して、その顔領域を焦点領域に設定する。奥行き情報取得部480は、奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、ユーザが焦点領域を設定しなくとも、画像処理装置400自身が焦点領域を設定することができる。
【0116】
<5.第5の実施の形態>
[画像処理装置の構成例]
次に、図22乃至25を参照して、本技術の第5の実施の形態について説明する。図22は、第5の実施の形態における焦点領域設定部413の一構成例を示すブロック図である。焦点領域設定部413は、構図に基づいて焦点領域を設定する点において第1の実施の形態の焦点領域設定部410と異なる。焦点領域設定部413は、候補領域抽出部440、優先度設定部450、および、候補領域選択部460を備える。
【0117】
第5の実施の形態の候補領域抽出部440は、構図に基づいて候補領域を抽出する点において、第3の実施の形態の候補領域抽出部420と異なる。候補領域抽出部440は、構図データベース441、構図決定部442、および、候補領域抽出処理部443を備える。
【0118】
構図データベース441は、三分割構図、パターン構図、放射線構図などの各種の構図に関する情報を記憶するものである。例えば、構図データベース441は、構図を構成する構図構成要素の画像内の配列パターンや、構図の名称などを記憶する。構図構成要素は、物体や顔などの被写体や、エッジ検出などにより検出される線分を含む。
【0119】
構図決定部442は、構図を決定するものである。構図決定部442は、例えば、画像内の被写体や線分を検出して、構図データベース441を参照し、被写体等の形状や配置が最も合致する構図を選択して画像の構図に決定する。構図決定部442は、決定した構図を示す構図情報を候補領域抽出処理部443に出力する。なお、構図決定部442は、ユーザの操作に従って、構図を決定することもできる。
【0120】
候補領域抽出処理部443は、決定された構図において主要な被写体の領域を候補領域として抽出するものである。候補領域抽出処理部443は、抽出した候補領域を示す候補領域情報を生成して優先度設定部450および候補領域選択部460に出力する。
【0121】
第3の実施の形態の優先度設定部450は、物体に限らず、物体や顔などの様々な被写体の領域の優先度を設定する点において第3の実施の形態の優先度設定部450と異なる。第4の実施の形態における優先度設定部450は、被写体情報登録部455および被写体優先度設定部456を備える。
【0122】
被写体情報登録部455は、選択において優先度を変更したい被写体に関する人物情報を登録するものである。被写体情報は、具体的には、特定の被写体の画像データや、被写体の名称などの情報である。
【0123】
被写体優先度設定部456は、候補領域のそれぞれの優先度を設定するものである。例えば、被写体優先度設定部456は、登録された被写体の画像に類似する候補領域の優先度を、類似しない候補領域よりも高く設定する。なお、被写体優先度設定部456は、逆に、登録された被写体の画像に類似する候補領域の優先度を低く設定することもできる。
【0124】
第5の実施の形態の候補領域選択部460は、第3の実施の形態の候補領域選択部460と同様のものである。
【0125】
なお、焦点領域設定部413は、構図データベース441および被写体情報登録部455を外部に設ける構成とすることもできる。
【0126】
また、焦点領域設定部413が優先度設定部450を備える構成としているが、焦点領域設定部413が優先度設定部450を有しない構成とすることもできる。
【0127】
図23は、第5の実施の形態における、三分割構図を設定した場合のぼかし処理の前後の画像データの一例である。図23(a)は、ぼかし処理前の画像データ650の一例である。画像データ650において、被写体651乃至654が撮像されている。図23(b)は、三分割構図を設定した画像データ650の一例である。
【0128】
ここで、三分割構図は、等間隔に引いた2本の水平線と等間隔に引いた2本の垂直線とにより、画像を9等分し、水平線および垂直線の線上または交点上に主要な被写体を配置する構図である。三分割構図の採用により、バランスの取れた芸術的な画像が得られる。
【0129】
構図決定部442は、例えば、三分割構図およびパターン構図のいずれかを選択するものとする。また、被写体651乃至654は、相似形の被写体でないものとする。この場合、パターン構図は適当でないため、三分割構図が選択される。この三分割構図において、交点PP1乃至PP4が設定される。図23(b)に示すように、被写体651および654は、いずれの交点上にも配置されていない。一方、被写体652は交点PP2上に配置され、被写体653は交点PP3上に配置されている。このため、被写体652および653が、構図上、主要な被写体と判断され、焦点領域に設定される。
【0130】
図23(c)は、ぼかし処理後の画像データ660の一例である。画像データ660における被写体661乃至664は、ぼかし処理前の画像データ650における被写体651乃至654に対応する被写体である。被写体652および653が焦点領域に設定されたため、それらに対応する被写体662および663にはぼかし処理が実行されない。一方、それ以外の被写体661および664には、奥行差分最小値に応じた度合いのぼかし処理が実行される。
【0131】
図24は、第5の実施の形態における、パターン構図を設定した場合のぼかし処理の前後の画像データおよび焦点領域情報の一例である。図24(a)は、ぼかし処理前の画像データ670の一例である。画像データ670において、被写体671乃至674が撮像されている。
【0132】
ここで、パターン構図は、画像において規則的に配置された相似形の被写体を主要な被写体とする構図である。パターン構図の採用により、リズム感のある画像が得られる。例えば、図24(a)において、被写体671乃至674は、規則的に配置されている。また、被写体671、672、および、674は、相似形の被写体である。この場合、規則的に並んだ相似形の被写体671、672、および、674が存在するために、パターン構図が選択される。そして、これらの被写体671、672、および、674が構図上、主要な被写体であると判断されて、焦点領域に設定される。
【0133】
図24(b)は、焦点領域情報680の一例である。図24(b)における白い領域の画素値は0であり、灰色の領域の画素値は1である。焦点領域情報680において、焦点領域681、682、および、684は、画像データ670において焦点領域に設定された被写体671、672、および、674に対応する領域である。図24(b)に示すように、これらの焦点領域内の画素の画素値に0が設定され、他の領域の画素値に1が設定されている。
【0134】
図24(c)は、ぼかし処理後の画像データ690の一例である。画像データ690において、被写体691乃至694は、画像データ670における被写体671乃至674に対応するものである。被写体671、672、および、674に焦点領域が設定されたため、それらに対応する被写体691、692、および、694に対しては、ぼかし処理が実行されない。一方、被写体693は、焦点領域に設定されなかったため、奥行差分最小値に応じた度合いのぼかし処理が実行されている。
【0135】
[画像処理装置の動作例]
続いて、図25を参照して、第5の実施の形態における画像処理装置の動作例について説明する。図25は、第5の実施の形態における焦点領域設定処理の一例を示すフローチャートである。焦点領域設定部413における構図決定部442は、画像内の被写体の形状や配置に基づいて構図を決定する(ステップS941)。候補領域抽出処理部443は、構図に基づいて複数の被写体領域を候補領域とする(ステップS942)。優先度設定部450は、登録された被写体の画像に類似する候補領域に高い優先度を設定する(ステップS943)。ステップS944乃至S946は、第3の実施の形態におけるステップS923乃至S925と同様の処理である。
【0136】
このように、第5の実施の形態によれば、焦点領域設定部413は、画像処理装置400は、構図を決定して、その構図に基づいて焦点領域を設定する。奥行き情報取得部480は、奥行き情報を生成する。ぼかし処理部490は、奥行き情報に基づいて奥行差分最小値を画素ごとに選択し、奥行差分最小値からフィルタ次数を算出してぼかし処理を実行する。これにより、ユーザが焦点領域を設定しなくとも、画像処理装置400自身が焦点領域を設定することができる。
【0137】
なお、上述の実施の形態は本技術を具現化するための一例を示したものであり、実施の形態における事項と、特許請求の範囲における発明特定事項とはそれぞれ対応関係を有する。同様に、特許請求の範囲における発明特定事項と、これと同一名称を付した本技術の実施の形態における事項とはそれぞれ対応関係を有する。ただし、本技術は実施の形態に限定されるものではなく、その要旨を逸脱しない範囲において実施の形態に種々の変形を施すことにより具現化することができる。
【0138】
また、上述の実施の形態において説明した処理手順は、これら一連の手順を有する方法として捉えてもよく、また、これら一連の手順をコンピュータに実行させるためのプログラム乃至そのプログラムを記憶する記録媒体として捉えてもよい。この記録媒体として、例えば、CD(Compact Disc)、MD(MiniDisc)、DVD(Digital Versatile Disk)、メモリカード、ブルーレイディスク(Blu-ray Disc(登録商標))等を用いることができる。
【0139】
なお、本技術は以下のような構成もとることができる。
(1)被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定部と、
前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得部と、
前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理部と
を具備する画像処理装置。
(2)前記焦点領域設定部は、
前記画像において前記焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出する候補領域抽出部と、
前記抽出された候補領域の中から複数の前記候補領域を選択して前記焦点領域として設定する候補領域選択部と
を備える前記(1)記載の画像処理装置。
(3)前記候補領域抽出部は、前記画像において所定の物体が撮像された領域を認識して前記候補領域として抽出する
前記(2)記載の画像処理装置。
(4)前記候補領域抽出部は、前記画像において顔が撮像された領域を認識して前記候補領域として抽出する
前記(2)または(3)に記載の画像処理装置。
(5)前記候補領域抽出部は、
前記画像において被写体の配置を定義する構図を決定する構図決定部と、
前記決定された構図に基づいて複数の領域を前記候補領域として抽出する候補領域抽出処理部と
を備える前記(2)乃至(4)のいずれかに記載の画像処理装置。
(6)前記焦点領域設定部は、
前記候補領域の選択における優先度を前記抽出された候補領域に設定する優先度設定部をさらに備え、
前記候補領域選択部は、前記設定された優先度に基づいて前記候補領域を選択する
前記(2)乃至(5)に記載の画像処理装置。
(7)前記優先度設定部は、所定の被写体が撮像された画像を登録しておき当該登録しておいた画像と前記候補領域との間の類似性に基づいて前記優先度を前記候補領域に設定する
前記(6)記載の画像処理装置。
(8)前記優先度設定部は、前記候補領域の面積に基づいて前記優先度を設定する
前記(6)または(7)に記載の画像処理装置。
(9)前記優先度設定部は、前記候補領域内のいずれかの画素に対応する前記奥行きに基づいて前記優先度を設定する
前記(6)乃至(9)のいずれかに記載の画像処理装置。
(10)前記奥行き設定部は、前記取得された奥行きのうちの最小または最大の値に対して前記候補領域内のいずれかの画素に対応する前記奥行きが近いほどその候補領域に対して高い優先度を設定する
前記(9)記載の画像処理装置。
(11)前記画像は、前記奥行きの取得において基準とされる基準画像と参照される参照画像とを含み、
前記奥行き取得部は、
前記基準画像内のいずれかの前記画素と当該画素に対応する前記参照画像内の前記画素との間の距離を視差として検出する視差検出部と、
前記検出された視差に基づいて前記基準画像内の前記画素に対応付けて前記奥行きを生成する奥行き生成部とを備え、
前記ぼかし処理部は、前記基準画像内のそれぞれの画素を前記対象画素として前記ぼかし処理を実行する
前記(1)乃至(10)のいずれかに記載の画像処理装置。
(12)前記ぼかし処理部は、
前記ぼかし処理の度合いをδjとし、前記画像を撮像した撮像装置のレンズの有効口径をDとし、前記対象画素に対応する前記奥行きをdjとし、前記最小値をΔdj_minとし、前記画像の撮像倍率をRとして、次式
δj=D×Δdj_min×R/dj
を使用して算出した度合いのぼかし処理を前記対象画素に対して実行する
前記(1)乃至(11)のいずれかに記載の画像処理装置。
(13)前記焦点領域設定部は、前記焦点領域を指定する操作信号に従って前記焦点領域を設定する
前記(1)乃至(12)のいずれかに記載の画像処理装置。
(14)前記焦点領域設定部は、設定する前記焦点領域の個数を閾値以下に制限して前記焦点領域を設定する
前記(1)乃至(13)のいずれかに記載の画像処理装置。
(15)焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
を具備する画像処理装置の制御方法。
(16)焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
をコンピュータに実行させるためのプログラム。
【符号の説明】
【0140】
100、101 撮像装置
150 撮像部
151 基準画像撮像部
152 参照画像撮像部
200 画像データ記憶部
250 奥行き計測部
300 操作部
400、401 画像処理装置
410、411、412、413 焦点領域設定部
420、430、440 候補領域抽出部
421 オブジェクトデータベース
422 物体認識部
431 顔画像データベース
432 顔認識部
441 構図データベース
442 構図決定部
443 候補領域抽出処理部
450 優先度設定部
451 物体情報登録部
452 物体優先度設定部
453 人物情報登録部
454 顔領域優先度設定部
455 被写体情報登録部
456 被写体優先度設定部
460 候補領域選択部
480、481 奥行き情報取得部
482 視差検出部
483 奥行き生成部
490 ぼかし処理部
491 奥行差分絶対値算出部
492 奥行差分最小値選択部
493 フィルタ次数算出部
494 ぼかしフィルタ
500 表示部
【特許請求の範囲】
【請求項1】
被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定部と、
前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得部と、
前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理部と
を具備する画像処理装置。
【請求項2】
前記焦点領域設定部は、
前記画像において前記焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出する候補領域抽出部と、
前記抽出された候補領域の中から複数の前記候補領域を選択して前記焦点領域として設定する候補領域選択部と
を備える請求項1記載の画像処理装置。
【請求項3】
前記候補領域抽出部は、前記画像において所定の物体が撮像された領域を認識して前記候補領域として抽出する
請求項2記載の画像処理装置。
【請求項4】
前記候補領域抽出部は、前記画像において顔が撮像された領域を認識して前記候補領域として抽出する
請求項2記載の画像処理装置。
【請求項5】
前記候補領域抽出部は、
前記画像において被写体の配置を定義する構図を決定する構図決定部と、
前記決定された構図に基づいて複数の領域を前記候補領域として抽出する候補領域抽出処理部と
を備える請求項2記載の画像処理装置。
【請求項6】
前記焦点領域設定部は、
前記候補領域の選択における優先度を前記抽出された候補領域に設定する優先度設定部をさらに備え、
前記候補領域選択部は、前記設定された優先度に基づいて前記候補領域を選択する
請求項2記載の画像処理装置。
【請求項7】
前記優先度設定部は、所定の被写体が撮像された画像を登録しておき当該登録しておいた画像と前記候補領域との間の類似性に基づいて前記優先度を前記候補領域に設定する
請求項6記載の画像処理装置。
【請求項8】
前記優先度設定部は、前記候補領域の面積に基づいて前記優先度を設定する
請求項6記載の画像処理装置。
【請求項9】
前記優先度設定部は、前記候補領域内のいずれかの画素に対応する前記奥行きに基づいて前記優先度を設定する
請求項6記載の画像処理装置。
【請求項10】
前記奥行き設定部は、前記取得された奥行きのうちの最小または最大の値に対して前記候補領域内のいずれかの画素に対応する前記奥行きが近いほどその候補領域に対して高い優先度を設定する
請求項9記載の画像処理装置。
【請求項11】
前記画像は、前記奥行きの取得において基準とされる基準画像と参照される参照画像とを含み、
前記奥行き取得部は、
前記基準画像内のいずれかの前記画素と当該画素に対応する前記参照画像内の前記画素との間の距離を視差として検出する視差検出部と、
前記検出された視差に基づいて前記基準画像内の前記画素に対応付けて前記奥行きを生成する奥行き生成部とを備え、
前記ぼかし処理部は、前記基準画像内のそれぞれの画素を前記対象画素として前記ぼかし処理を実行する
請求項1記載の画像処理装置。
【請求項12】
前記ぼかし処理部は、
前記ぼかし処理の度合いをδjとし、前記画像を撮像した撮像装置のレンズの有効口径をDとし、前記対象画素に対応する前記奥行きをdjとし、前記最小値をΔdj_minとし、前記画像の撮像倍率をRとして、次式
δj=D×Δdj_min×R/dj
を使用して算出した度合いのぼかし処理を前記対象画素に対して実行する
請求項1記載の画像処理装置。
【請求項13】
前記焦点領域設定部は、前記焦点領域を指定する操作信号に従って前記焦点領域を設定する
請求項1記載の画像処理装置。
【請求項14】
前記焦点領域設定部は、設定する前記焦点領域の個数を閾値以下に制限して前記焦点領域を設定する
請求項1記載の画像処理装置。
【請求項15】
焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
を具備する画像処理装置の制御方法。
【請求項16】
焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
をコンピュータに実行させるためのプログラム。
【請求項1】
被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定部と、
前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得部と、
前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理部と
を具備する画像処理装置。
【請求項2】
前記焦点領域設定部は、
前記画像において前記焦点領域の候補とすべき複数の領域のそれぞれを候補領域として抽出する候補領域抽出部と、
前記抽出された候補領域の中から複数の前記候補領域を選択して前記焦点領域として設定する候補領域選択部と
を備える請求項1記載の画像処理装置。
【請求項3】
前記候補領域抽出部は、前記画像において所定の物体が撮像された領域を認識して前記候補領域として抽出する
請求項2記載の画像処理装置。
【請求項4】
前記候補領域抽出部は、前記画像において顔が撮像された領域を認識して前記候補領域として抽出する
請求項2記載の画像処理装置。
【請求項5】
前記候補領域抽出部は、
前記画像において被写体の配置を定義する構図を決定する構図決定部と、
前記決定された構図に基づいて複数の領域を前記候補領域として抽出する候補領域抽出処理部と
を備える請求項2記載の画像処理装置。
【請求項6】
前記焦点領域設定部は、
前記候補領域の選択における優先度を前記抽出された候補領域に設定する優先度設定部をさらに備え、
前記候補領域選択部は、前記設定された優先度に基づいて前記候補領域を選択する
請求項2記載の画像処理装置。
【請求項7】
前記優先度設定部は、所定の被写体が撮像された画像を登録しておき当該登録しておいた画像と前記候補領域との間の類似性に基づいて前記優先度を前記候補領域に設定する
請求項6記載の画像処理装置。
【請求項8】
前記優先度設定部は、前記候補領域の面積に基づいて前記優先度を設定する
請求項6記載の画像処理装置。
【請求項9】
前記優先度設定部は、前記候補領域内のいずれかの画素に対応する前記奥行きに基づいて前記優先度を設定する
請求項6記載の画像処理装置。
【請求項10】
前記奥行き設定部は、前記取得された奥行きのうちの最小または最大の値に対して前記候補領域内のいずれかの画素に対応する前記奥行きが近いほどその候補領域に対して高い優先度を設定する
請求項9記載の画像処理装置。
【請求項11】
前記画像は、前記奥行きの取得において基準とされる基準画像と参照される参照画像とを含み、
前記奥行き取得部は、
前記基準画像内のいずれかの前記画素と当該画素に対応する前記参照画像内の前記画素との間の距離を視差として検出する視差検出部と、
前記検出された視差に基づいて前記基準画像内の前記画素に対応付けて前記奥行きを生成する奥行き生成部とを備え、
前記ぼかし処理部は、前記基準画像内のそれぞれの画素を前記対象画素として前記ぼかし処理を実行する
請求項1記載の画像処理装置。
【請求項12】
前記ぼかし処理部は、
前記ぼかし処理の度合いをδjとし、前記画像を撮像した撮像装置のレンズの有効口径をDとし、前記対象画素に対応する前記奥行きをdjとし、前記最小値をΔdj_minとし、前記画像の撮像倍率をRとして、次式
δj=D×Δdj_min×R/dj
を使用して算出した度合いのぼかし処理を前記対象画素に対して実行する
請求項1記載の画像処理装置。
【請求項13】
前記焦点領域設定部は、前記焦点領域を指定する操作信号に従って前記焦点領域を設定する
請求項1記載の画像処理装置。
【請求項14】
前記焦点領域設定部は、設定する前記焦点領域の個数を閾値以下に制限して前記焦点領域を設定する
請求項1記載の画像処理装置。
【請求項15】
焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
を具備する画像処理装置の制御方法。
【請求項16】
焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する焦点領域設定手順と、
奥行き取得部が、前記被写体までの奥行きを前記画像内の画素に対応付けて取得する奥行き取得手順と、
ぼかし処理部が、前記画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの前記焦点領域に対応する前記奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行するぼかし処理手順と
をコンピュータに実行させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図21】
【図22】
【図25】
【図8】
【図20】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図21】
【図22】
【図25】
【図8】
【図20】
【図23】
【図24】
【公開番号】特開2013−12820(P2013−12820A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−142807(P2011−142807)
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]