
画像処理装置、および画像処理方法、並びにプログラム
【課題】2次元画像の変換により、違和感の少ない3次元画像信号を生成する。
【解決手段】2次元画像信号の解析処理により画像領域単位の画像特徴情報、例えば、輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定する。これらの特徴情報と、3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する。この結果、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【解決手段】2次元画像信号の解析処理により画像領域単位の画像特徴情報、例えば、輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定する。これらの特徴情報と、3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する。この結果、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像処理装置、および画像処理方法、並びにプログラムに関し、特に2次元(2D)画像の画像変換を実行して3次元(3D)画像表示に適用する視差画像を生成する画像処理装置、および画像処理方法、並びにプログラムに関する。
【背景技術】
【0002】
2次元(2D)画像を3次元(3D)画像表示用の視差画像、すなわち、左目で観察する左目用画像と、右目で観察する右目用画像に変換する装置および方法について従来から様々な提案がなされている。
【0003】
2次元画像に基づいて生成された視差画像は、左目で観察する左目用画像と右目で観察する右目用画像のペアによって構成される。左目用画像を観察者の左目のみで観察し、右目用画像を観察者の右目のみで観察することで、観察者は画像を立体画像として知覚することができる。
【0004】
このような画像の生成や表示処理に関して開示した従来技術には、例えば、特許文献1(特開平11−98351号公報)や、特許文献2(特開平8−30806号公報)がある。これらの文献は、2次元画像をベースとして左目用画像と右目用画像を生成するものであり、左目用画像と右目用画像を、2次元画像をベースとして所定量だけ水平方向にずらすことにより、立体感を感じられる画像を生成する構成を提案している。
【0005】
しかしこの画像ずらし処理を行うフィルタ処理は、例えば2D画像のすべての画像部分を一律にずらして視差を設定することになり、本来、視差を設定すべきでない部分にも視差を発生させてしまい、違和感のある3次元画像が生成されるという問題がある。これは視差をつけるべき部分と、視差をつけてはいけない部分を区別せず、例えばオブジェクトの輪郭ではない模様などのディテール部分などに本来視差をつけてはいけない部分にも視差を発生させてしまうことに起因する。結果的に、ディテール部分にも視差生成を行うことになり、ディテール部分に輪郭部分と同様な視差がつき、本来ありえない視差が発生してしまい不自然な3次元画像が生成されるという問題が発生していた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−98351号公報
【特許文献2】特開平8−30806号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、例えば上記の問題を解決するものであり、2次元(2D)画像に対する画像変換を実行して3次元(3D)画像表示に適用する視差画像を生成する際に、2次元画像の各領域の特性を解析し、解析結果に応じた視差画像の生成処理を行なうことで、より自然な3次元(3D)画像を生成する画像処理装置、および画像処理方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の第1の側面は、
2次元画像信号を入力する画像入力部と、
前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成部と、
前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析部と、
前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成部を有する画像処理装置にある。
【0009】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号の輝度信号の解析を実行して画像領域単位の輝度輪郭対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記輝度輪郭対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0010】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号の色差信号の解析を実行して画像領域単位の色差対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記色差対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0011】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号の特定色の解析を実行して画像領域単位の特定色対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記特定色対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0012】
さらに、本発明の画像処理装置の一実施態様において、前記特定色は肌色である。
【0013】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号のノイズ情報の解析を実行して画像領域単位のノイズ対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記ノイズ対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0014】
さらに、本発明の画像処理装置の一実施態様において、前記3次元画像信号生成部は、以下の式を適用して3次元視差信号補正値(3DFout)算出する、
3DFout={(GainLine)×(LineJ−Ky)×FK1+(GainEdge)×(EdgeJ−Kc)×FK2+(GainSkin)×(SkinF−Ks)×FK3}×(NoiseG×Kn)
ただし、LineJは、輝度輪郭対応制御信号、
GainLineは、輝度輪郭対応制御信号(LineJ)のゲイン補正量、
EdgeJは、色差対応制御信号、
GainEdgeは、色差対応制御信号(EdgeJ)のゲイン補正量、
SkinFは、肌色対応制御信号、
GainSkinは、肌色対応制御信号(SkinF)のゲイン補正量、
NoiseGは、ノイズ対応制御信号、
GainNoiseは、ノイズ対応制御信号(NoiseG)のゲイン補正量、
Kyは、輝度ゲインオフセット、
Kcは、色差ゲインオフセット、
Ksは、特定色(本例では肌色)補正ゲイン、
Knは、ノイズ補正ゲイン
である。
【0015】
さらに、本発明の画像処理装置の一実施態様において、前記3次元画像信号生成部は、3次元画像を構成する視差画像としての3次元画像信号(3DVout)を、2次元画像信号に対して、前記3次元視差信号補正値(3DFout)を加算する下記式により算出する、
3DVout=2次元画像信号+3DFout。
【0016】
さらに、本発明の画像処理装置の一実施態様において、前記画像処理装置は、入力2次元画像信号に対する画質調整を実行する画質調整部を有し、前記3次元画像信号生成部は、画質調整のなされた2次元画像信号に対して前記3次元視差信号補正値(3DFout)を加算する処理を実行する。
【0017】
さらに、本発明の第2の側面は、
撮像部と、前記いずれかに記載の画像処理を実行する画像処理部とを有する撮像装置にある。
【0018】
さらに、本発明の第3の側面は、
画像処理装置において画像処理を実行する画像処理方法であり、
画像入力部が、2次元画像信号を入力する画像入力ステップと、
3次元画像視差信号生成部が、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成ステップと、
2次元画像信号解析部が、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析ステップと、
3次元画像信号生成部が、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成ステップを実行する画像処理方法にある。
【0019】
さらに、本発明の第4の側面は、
画像処理装置において画像処理を実行させるプログラムであり、
画像入力部に、2次元画像信号を入力させる画像入力ステップと、
3次元画像視差信号生成部に、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成させる3次元画像視差信号生成ステップと、
2次元画像信号解析部に、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成させる2次元画像信号解析ステップと、
3次元画像信号生成部に、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出させ、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成させる3次元画像信号生成ステップを実行させるプログラムにある。
【0020】
なお、本発明のプログラムは、例えば、様々なプログラム・コードを実行可能な汎用システムに対して、コンピュータ可読な形式で提供する記憶媒体、通信媒体によって提供可能なプログラムである。このようなプログラムをコンピュータ可読な形式で提供することにより、コンピュータ・システム上でプログラムに応じた処理が実現される。
【0021】
本発明のさらに他の目的、特徴や利点は、後述する本発明の実施例や添付する図面に基づくより詳細な説明によって明らかになるであろう。なお、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【発明の効果】
【0022】
本発明の一実施例構成によれば、2次元画像の変換により、違和感の少ない3次元画像信号が生成される。本発明の画像処理装置では2次元画像信号の解析処理により画像領域単位の画像特徴情報、例えば、輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定する。これらの特徴情報と、3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する。この結果、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【図面の簡単な説明】
【0023】
【図1】本発明の画像処理装置の一構成例について説明する図である。
【図2】本発明の画像処理装置の一構成例について説明する図である。
【図3】本発明の画像処理装置において実行するフィルタを適用した視差画像の生成処理について説明する図である。
【図4】本発明の画像処理装置において実行するフィルタを適用した視差画像の生成処理について説明する図である。
【図5】本発明の画像処理装置において実行する輪郭部判定処理について説明する図である。
【図6】本発明の画像処理装置において実行する輪郭部判定処理について説明する図である。
【図7】FIRフィルタを9Tapとして設定した場合の本発明の画像処理装置において実行する輪郭部判定処理について説明する図である。
【図8】本発明の画像処理装置において実行する色差検出部の色エッジ判定処理について説明する図である。
【図9】FIRフィルタを9Tapとして設定した場合の本発明の画像処理装置において実行する色差検出部の色エッジ判定処理について説明する図である。
【図10】本発明の一実施例に係る画像処理装置のハードウェア構成例について説明する図である。
【発明を実施するための形態】
【0024】
以下、図面を参照しながら本発明の画像処理装置、および画像処理方法、並びにプログラムの詳細について説明する。以下の項目に従って順次説明する。
1.本発明の画像処理装置の実行する処理の概要について
2.画像処理装置の構成例について
3.画像処理装置の詳細構成と処理の詳細について
4.画像処理装置のハードウェア構成例について
【0025】
[1.本発明の画像処理装置の実行する処理の概要について]
まず、本発明の画像処理装置の実行する処理の概要について説明する。本発明の画像処理装置は2次元画像(2D画像)を入力し、2次元画像に対する画像変換処理により、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成する処理を実行する。この視差画像の生成処理に際して、画像解析を行い、解析結果を利用して3D画像信号の生成処理を行う。
【0026】
例えば、まず、画像情報解析ルーチンを実行して処理対象となる画像コンテンツから画像の特徴情報や属性情報を取得する。さらに次の判定ルーチンにおいてコンテンツの特徴点情報及び属性情報に基づく処理判定処理を実行する。さらに、判定結果に基づいて最後の制御ルーチンを実行し、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成する。
【0027】
本発明の画像処理装置では、例えば2次元画像の画像変換により、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成する構成において、違和感のない3次元画像を連続して生成、出力することを可能とする。
【0028】
なお、本発明の画像処理装置は、2次元画像(2D画像)を入力して画像処理を実行可能な装置であればよく、例えばPC、撮像装置、TV、プレーヤ等の様々な装置において実現される。
【0029】
[2.画像処理装置の構成例について]
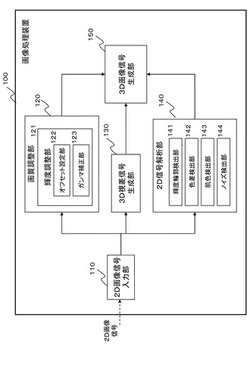
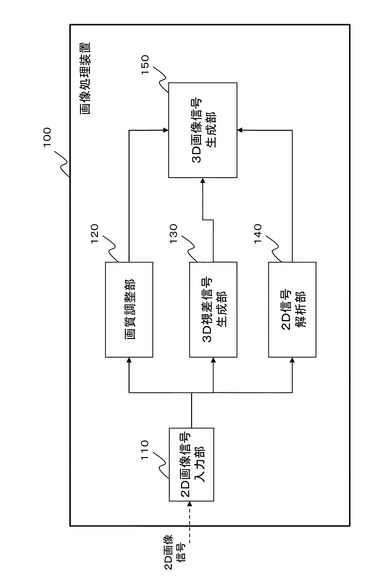
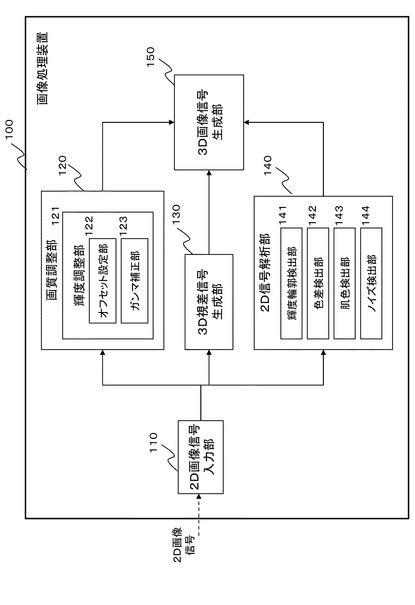
図1は、本発明の画像処理装置の一実施例を示す図である。画像処理装置100は、図1に示すように、2D画像信号入力部110、画質調整部120、3D視差信号生成部130、2D信号解析部140、3D画像信号生成部150を有する。
【0030】
2D画像信号入力部110は、処理対象とする2D画像信号を入力する。2D画像信号入力部110に入力された2D画像信号は、画質調整部120、3D視差信号生成部130、2D信号解析部140に入力される。
【0031】
画質調整部120、3D視差信号生成部130、2D信号解析部140では、それぞれ後段で説明する処理を実行し、処理結果を3D画像信号生成部150に出力する。
3D画像信号生成部150は、画質調整部120、3D視差信号生成部130、2D信号解析部140の処理結果を入力して、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成して出力する。
【0032】
[3.画像処理装置の詳細構成と処理の詳細について]
図2に、画像処理装置100の詳細構成例を示す。
図2に示すように、画質調整部120は、輝度調整部121を有し、輝度調整部121は、さらに、オフセット設定部122、ガンマ補正部123を有する。
また、2D信号解析部140は、輝度輪郭検出部141、色差検出部142、肌色検出部143、ノイズ検出部144を有する。
【0033】
2D画像信号入力部110は、2Dビデオ信号を入力し、2D画像信号入力部110内のメモリに数ライン分の画像データを蓄積する。このメモリに蓄積された画像データが、順次、画質調整部120、3D視差信号生成部130、2D信号解析部140に提供される。
【0034】
画質調整部120は、3次元画像を表示する表示装置の性能に合わせて輝度調整を行う。この処理をオフセット設定部122、ガンマ補正部123において実行する。
オフセット設定部122は、入力された2Dビデオ信号に定量的な輝度のオフセットを付加する。入力される輝度信号をXとした場合、出力される輝度信号Yは、
Y=X+b
となる。bはオフセット分の輝度信号である。
ガンマ補正部123は、入力された2Dビデオ信号の輝度信号の大小に応じて異なるゲインを適用した輝度補正、すなわちガンマ補正処理を実行する。
【0035】
3D視差信号生成部130は、入力された2次元画像信号に対して水平方向のフィルタを適用して、3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成する。
【0036】
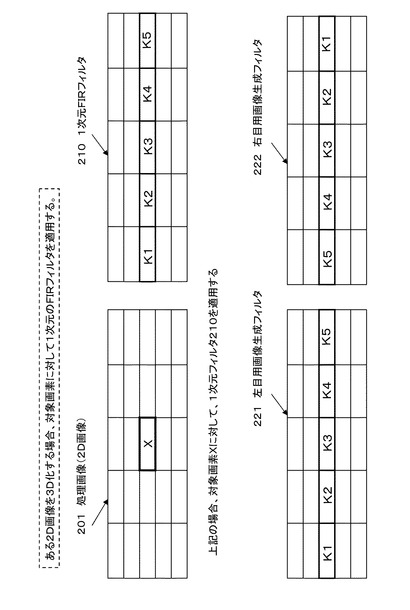
図3、図4を参照して、フィルタを適用した視差画像の生成処理について説明する。
図3に示す処理画像(2D画像)201が、処理対象とする2次元画像である。処理画像(2D画像)201に対して、あらかじめ係数K1〜K5を設定した1次元フィルタ210を適用した処理を実行する。
【0037】
3次元画像表示に適用する左目用画像を生成するフィルタと右目用画像を生成するフィルタは係数K1〜K5を反転させた設定とする。
図3の下段に示すような左目用画像生成フィルタ221と、右目用画像生成フィルタ222のような設定である。
この設定のフィルタを処理画像(2D画像)201に適用することで、3次元画像表示に適用する左目用画像と右目用画像を生成する。
【0038】
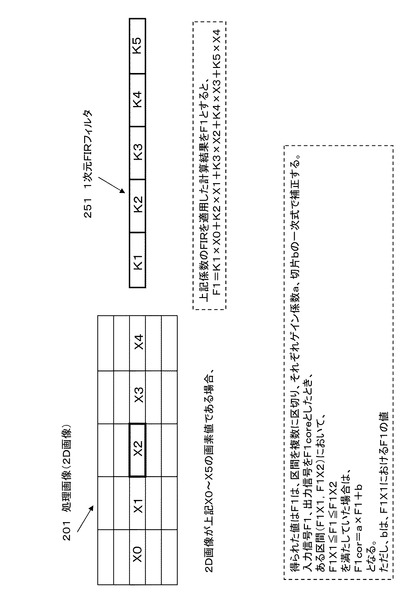
フィルタの適用処理例について図4を参照して説明する。図4に示す処理画像(2D)画像201に対して、図4に示す1次元FIRフィルタ251を適用する。
処理画像(2D)画像201は、図に示す中央のラインの画素値がX0〜X4の設定であるものとする。
1次元FIRフィルタ251はフィルタ係数:K1〜〜K5が設定されたフィルタである。
【0039】
このFIRフィルタ251の適用結果として算出される値をF1とすると、
F1==K1×X0+K2×X1+K3×X2+K4×X3+K5×X4
となる。
この算出処理において、得られた値:F1を、区間を複数に区切り、それぞれゲイン係数a、切片bの一次式で補正する。すなわち、
入力信号をF1、
出力信号をF1core、
とすると、ある区間(F1×1,F1×2)において、
F1×1≦F1≦F1×2
を満たしていた場合は、
F1cor=a×F1+b
となる。
ただし、bは、F1×1におけるF1の値である。
【0040】
3D視差信号生成部130は、係数の異なるFIRフィルタを複数有する。3D視差信号生成部130は、これら係数の異なるFIRフィルタを適用した結果を生成して後段の3D画像信号生成部150に出力する。例えば3種類のフィルタを持つ場合、上述のFIRフィルタ251の適用結果として算出される値、F1の他、異なる係数を持つFIRフィルタの適用結果、F2,F3が得られる。
【0041】
3D視差信号生成部130は、3種類のフィルタの適用結果としてF1、F2、F3を算出し、さらに、これらのF1〜F3を補正係数K1〜K3(上述のゲイン係数a、切片bの一次式での補正に対応)で補正した結果として視差画像画素値情報FK1、FK2、FK3を生成する。これ等の各値が後段の3D画像信号生成部150に出力される。3D画像信号生成部150は、これ等の情報を利用して視差画像としての左目用画像信号と右目用画像信号の構成画素の画素値を決定する。
【0042】
なお、3D視差信号生成部130は、視差画像画素値情報FK1、FK2、FK3の各値を視差画像としての左目用画像信号と右目用画像信号の構成画素各々に対応する値として生成して3D画像信号生成部150に出力する。
【0043】
2D信号解析部140は、図2に示すように、輝度輪郭検出部141、色差検出部142、肌色検出部143、ノイズ検出部144を有する。これらの各処理部の処理を統合して、3D視差信号の適応処理を行うための制御信号を生成する。
各処理部の処理について説明する。
【0044】
輝度輪郭検出部141
輝度輪郭検出部141は、処理対象とする2次元画像信号の輝度信号Yを解析して、各画素部分が画像内のオブジェクトの輪郭部分に相当するか、輪郭部以外の例えばディテール部なのかを判別する。
【0045】
具体的には、2D画像信号入力部110から入力された2Dビデオ信号に対して、3D視差信号生成部130で使用したFIRフィルタのタップ数の範囲で特徴点を収集し、対象画素が輪郭部に相当するか否かを判定する。
【0046】
この輪郭部判定処理について、図5、図6を参照して説明する。
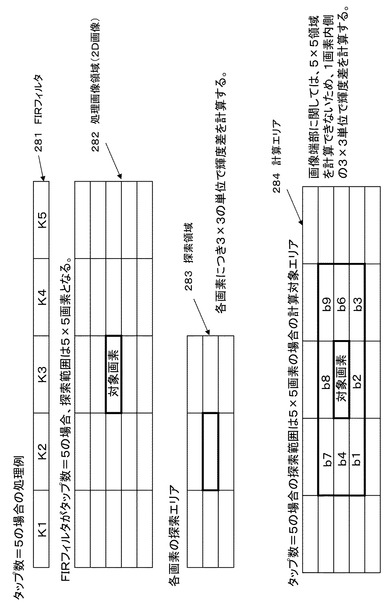
FIRフィルタのタップ数が5タップの場合の処理例について説明する。
図5に示すようなタップ数=5のFIRフィルタ281を適用した処理例である。
処理画像領域282に対する処理を説明する。
【0047】
まず処理画像領域282内での輝度差分布を調べるために、各画素につき3×3画素の単位を探索領域283として、5×5画素の処理画像領域282の輝度差を計算する。
5×5画素の処理画像領域282を探索範囲とした場合には中央の3×3画素部分をセンターとした計算をそれぞれ行う。
【0048】
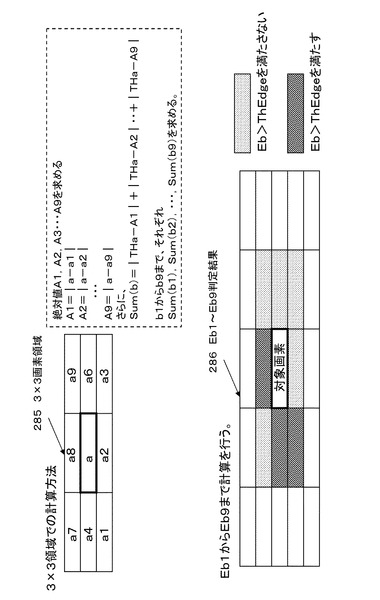
図6に示すような、3×3画素領域285内の輝度値Yを、センター画素の輝度値a、周囲の輝度値をa1〜a9としたとき、以下の中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値A1〜A9を算出する。
A1=|a−a1|
A2=|a−a2|
A3=|a−a3|
・・・
A9=|a−a9|
このように、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値A1〜A9を算出する。
【0049】
次に、A1、A2・・・A9を予め規定した閾値THaから引いた絶対値をすべて加算してSum(b)とする。すなわち、
Sum(b)=|THa−A1|+|THa−A2|+・・・+|THa−A9|
上記式に従ってSum(b)を算出する。
【0050】
A1、A2・・・A9は、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きいほど、より大きい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば大きい値となり、輝度値変化の少ない平坦領域であれば小さい値となる。また閾値THaをA1〜A9より大きい値として設定すると、
Sum(b)=|THa−A1|+|THa−A2|+・・・+|THa−A9|
このSum(b)は、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きい(A1〜A9が大きい)ほど、より小さい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば小さい値となり、輝度値変化の少ない平坦領域であれば大きい値となる。
【0051】
このSum(b)を図5に示す計算エリア284のb1、b2・・・b9の9箇所について全て算出する。これらの算出結果を、それぞれ、
Sum(b1)、
Sum(b2)、
・・・
Sum(b9)、
とする。
【0052】
さらに、それぞれのSum(b)に対して予め設定した補正閾値THbからSum(b)を引いた絶対値Ebを計算する。
Eb=|THb−Sum(b)|
上記算出式に従った計算を行って絶対値Ebを算出する。
【0053】
前述したように、Sum(b)は、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きい(A1〜A9が大きい)ほど、より小さい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば小さい値となり、輝度値変化の少ない平坦領域であれば大きい値となる。
従って、THbをSum(b)より大きな値として設定すると、
Eb=|THb−Sum(b)|
上記算出式に従った計算される絶対値Ebは、Sum(b)が大きければ小さい値となり、Sum(b)が小さい場合は大きな値となる。
【0054】
すなわち、Ebは、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きい(A1〜A9が大きい)ほど、より大きい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば大きい値となり、輝度値変化の少ない平坦領域であれば小さい値となる。
【0055】
この絶対値Ebの算出を、図5に示す計算エリア284のb1、b2・・・b9の9箇所について全て算出する。これらの算出結果を、
Eb1=|Thb−Sum(b1)|
Eb2=|Thb−Sum(b2)|
・・・
Eb9=|Thb−Sum(b9)|
としてそれぞれ求める。
【0056】
Ebが、あらかじめ設定した閾値ThEdgeよりも大きい場合、すなわち、
Eb>ThEdge
ならエッジ、すなわち輪郭部分であると判定する。
【0057】
この処理によって、例えば図6の下段に示すEb1〜Eb9判定結果286が得られる。
図6の下段に示すEb1〜Eb9判定結果286は、処理対象画素の周囲の画素について、
Eb>ThEdge
上記式を満足するか否かを区別して示している。
【0058】
処理対象画素の周囲に、
Eb>ThEdge
を満たす画素が隣接している場合、エッジ(輪郭部分)部分が隣接していると判断する。
周囲8画素中、上記判定式Eb>ThEdgeを満たす画素数をカウントする。
図6の下段に示すEb1〜Eb9判定結果286では、上記判定式Eb>ThEdgeを満たす画素数は3となる。
最終的には、この画素数に応じて処理対象画素がエッジ(輪郭)領域であるか否かを判定する。例えば、処理対象画素の周囲画素中、半数以上の画素がEb>ThEdgeを満たしている場合、エッジ(輪郭部分)部分が隣接していると判断する。
【0059】
なお、ここで説明した処理例は、5×5画素の探索範囲を設定した場合の処理例であるが、5×5画素より大きい場合には、上記判定式Eb>ThEdgeを満たす画素数のカウント領域を処理対象画素に直接隣接する8画素のみではなく、さらに周囲の画素についても考慮する設定としてもよい。
【0060】
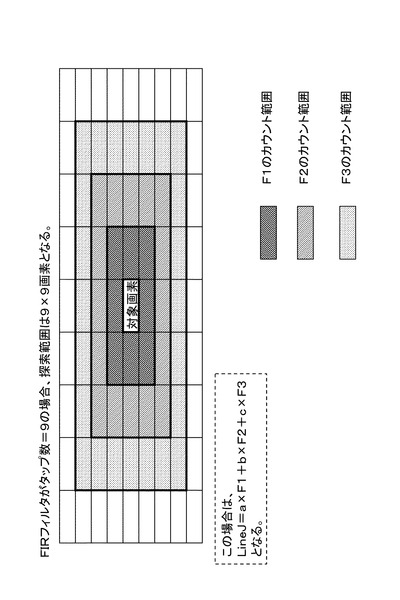
例えば、図7にFIRフィルタを9Tapとして設定した場合の処理例を示す。図7に示すように、中心に示す処理対象画素に隣接する8画素について、上記と同様の処理によって、上記判定式Eb>ThEdgeを満たす画素数をカウントして、このカウント数F1とする。
さらに、この8画素の周囲の16画素について、上記判定式Eb>ThEdgeを満たす画素数をカウントして、このカウント数F2とする。
さらに、この16画素の周囲の24画素について、上記判定式Eb>ThEdgeを満たす画素数をカウントして、このカウント数F3とする。
【0061】
これらのカウント数F1〜F3を適用してエッジ領域であるか否かを判定する構成としてもよい。具体的には例えば、補正係数a,b,・・・を含めた以下に示す輪郭判定式、
LineJ=a×F1+b×F2+・・・
上記式に従って、輝度輪郭対応制御信号(LineJ)を計算する。
輝度輪郭対応制御信号(LineJ)が、予め設定された閾値より大きい場合には、輝度輪郭(エッジ)領域であると判定することができる。なお、この輝度輪郭対応制御信号(LineJ)は後段の3D画像信号生成部150で視差信号のゲインコントロールにも用いることができる。
【0062】
色差検出部142
次に色差検出部142について説明する。色差検出部142では処理対象とする2次元画像信号の色差信号(Cb,Cr)の分布を調べて、処理対象画素が色エッジ部に相当するかどうかを計算する。
この処理における探索範囲は輪郭検出の範囲と同様に、3D視差信号生成部130の視差画像生成処理で使用するFIRフィルタのタップ数の範囲とし、この範囲で、順次、色エッジの判定を行う。
【0063】
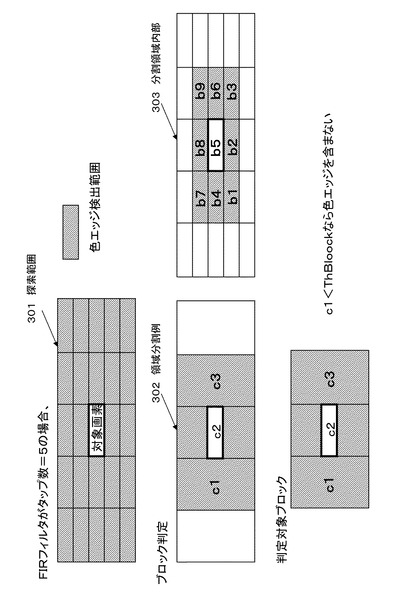
図8を参照して色差検出部142において実行する色エッジ判定処理について説明する。
例えば図8の探索範囲301に示すようにFIRフィルタのタップ数に合わせた5×5画素の領域を中心の処理対象画素の周囲に設定し、処理対象画素の周囲の画素について、色差信号:Cb、Crそれぞれに対して、前述の輝度信号Yベースの輪郭検出と同様のアルゴリズムで色差信号:Cb、Cr対応のエッジを検出する。
【0064】
基本的には、前述の輝度輪郭検出部141において実行した輝度信号Yベースの輪郭検出処理における輝度値Yを、色差信号Cr,Cbに置き換えた処理として実行する。
ただし、色の場合は垂直方向で集約するために、図8の領域分割例302に示すように、画素領域を、
処理対象画素の左側の垂直画素領域:c1、
処理対象画素を含む垂直画素領域:c2、
処理対象画素の右側の垂直画素領域:c3、
このように画素領域をc1〜c3として分けて処理を行う。
【0065】
例えば処理対象画素の左側の垂直画素領域:c1、この画素領域に対しては、
c1=b7+b4+b1となる。
b7,b4,b1は、図8の分割領域内部303に示すように、垂直画素領域:c1内の画素値を示している。なお、この場合の画素値は、色差CbまたはCrの値である。
【0066】
例えば、c1が、予め設定した閾値ThBlockよりも小さい否かをブロック判定処理として実行する。すなわち、
c1<ThBlock
なら、垂直画素領域c1はブロックであると判定する。
垂直画素領域c2,c3についても同様に、上記と同様のブロック判定を行う。
c1、c2、c3のいずれかがブロック判定において判定式を満たさない、すなわちブロックでないと判定された(fail)場合、処理対象画素の周囲に色エッジが含まれると判定する。
【0067】
色エッジが含まれると判定された場合、以下の式に従って、色差対応制御信号(EdgeJ)を算出する。
EdgeJ=a×1
上記式において、aは補正係数、1は処理対象画素からの距離(離間画素数)を示している。
【0068】
この処理例では、タップ数=5の5Tapのフィルタによる処理例を説明したが、前述の輝度Yベースの輪郭検出処理と同様、図7を参照して説明した9Tapの場合など、検証領域を大きく設定して色差対応制御信号(EdgeJ)の算出を実行してもよい。
【0069】
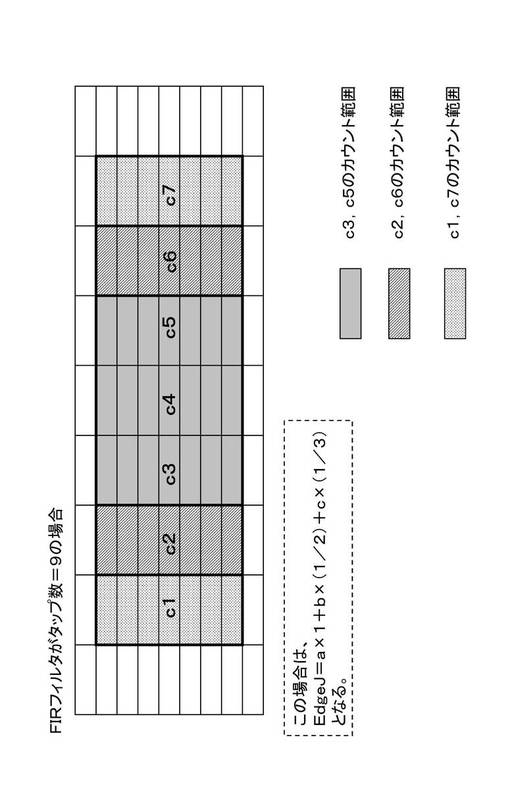
図9は、図7を参照して説明したと同様、9TtapのFIRフィルタを利用した場合の色差対応制御信号(EdgeJ)の算出処理例を説明する図である。
【0070】
この場合、図9に示すように垂直画素領域c1〜c7を設定し、
c1〜c7の各々が、予め設定した閾値よりも小さい否かをブロック判定処理として実行する。すなわち、例えば、
c1<ThBlock
なら、垂直画素領域c1はブロックであると判定する。
垂直画素領域c2〜c7についても同様に、上記と同様のブロック判定を行う。
c1〜c7のいずれかがブロック判定において判定式を満たさない、すなわちブロックでないと判定された(fail)場合、処理対象画素の周囲に色エッジが含まれると判定する。
【0071】
色エッジが含まれると判定された場合、以下の式に従って、色差対応制御信号(EdgeJ)を算出する。
EdgeJ=a×1+b×(1/2)+c×(1/3)
このように、(1/画素間距離)として計算する。
上記式において、a,b,cは補正係数、1,2,3は処理対象画素からの距離(離間画素数)を示している。
【0072】
なお、色差対応制御信号(EdgeJ)は色差Cb、Cr各々について計算し、絶対値比較を行い、大きいほうを選択して選択した色差対応制御信号(EdgeJ)を色エッジ判定処理に適用する。すなわち、予め設定した閾値と比較して色エッジの有無を判定する。なお、ここで得られる色差対応制御信号(EdgeJ)は、3D視差信号の制御に適用可能である。
【0073】
肌色検出部143
次に、肌色検出部143の処理について説明する。肌色検出部143は、2D画像信号入力部110から入力された2D画像信号に含まれる色差信号:Cb、Crの値が、予め規定したCb、Crのレンジに収まっているか否かを判定する。具体的には、
予め規定したCb、Crのレンジは、人の肌色の範囲に対応し、入力画像信号の各画素の色差信号:Cb、Crの値が、予め規定したCb、Crのレンジ内であれば肌色に相当する画素であると判定し、レンジ外であれば肌色に相当しない画素であると判定する。
【0074】
Cb、Crが特定色をみたすかどうかは、例えば予め規定したCb、Crのレンジを記録したテーブルを参照して判定する。
入力画像信号の各画素の色差信号:Cb、Crの値が、予め規定したCb、Crのレンジ内であれば肌色に相当する画素であると判定し、以下に示す肌色対応制御信号を出力する。
SkinF=0
値0は、その画素が肌色であることを示すフラグの値である。
【0075】
一方、入力画像信号の各画素の色差信号:Cb、Crの値が、予め規定したCb、Crのレンジ外であれば肌色に相当しない画素であると判定し、
SkinF=1
を出力する。値1は、その画素が肌色でないことを示すフラグの値である。
【0076】
肌色検出部143は、このように、肌色対応制御信号(SkinF)を生成して後段の3D画像信号生成部150に提供する。なお、肌色検出部143は、この肌色対応制御信号(SkinF)は、各画素に対応する信号として生成し出力する。
【0077】
ノイズ検出部144
次に、ノイズ検出部144の処理について説明する。ノイズ検出部144は、2D画像信号入力部110から入力された2Dビデオ信号に含まれるフレームノイズを検出する。検出処理は画素単位で実行され、画素単位のノイズ情報NoiseGを出力する。なお、フレームノイズを検出する手法としては従来から知られるノイズ検出手法が適用可能である。
【0078】
ノイズ検出部144は、各画素について、
予め規定した閾値以上のノイズが含まれる場合、
ノイズありを示すノイズ対応制御信号:NoiseG=1を画素対応のフラグとして出力し、
予め規定した閾値未満のノイズしか含まれない場合、
ノイズなしを示すノイズ対応制御信号:NoiseG=0を画素対応のフラグとして出力する。
【0079】
ノイズ検出部144は、このように、ノイズ対応制御信号(NoiseG)を生成して後段の3D画像信号生成部150に提供する。なお、ノイズ検出部144は、このノイズ対応制御信号(NoiseG)は、各画素に対応する信号として生成し出力する。
【0080】
3D画像信号生成部150
次に、3D画像信号生成部150の実行する処理について説明する。
3D画像信号生成部150は、
画質調整部120から画質調整のなされた2D画像信号、
3D視差信号生成部130から3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3、
これらの各情報を入力する。
【0081】
さらに、2D信号解析部140から以下の情報を入力する。
輝度輪郭検出部141から、輝度輪郭対応制御信号(LineJ)、
色差検出部142から、色差対応制御信号(EdgeJ)、
肌色検出部143から、肌色対応制御信号(SkinF)、
ノイズ検出部144から、ノイズ対応制御信号(NoiseG)、
これらの制御信号(LineJ、EdgeJ、SkinF、NoiseG)を入力する。
【0082】
3D画像信号生成部150は、このように、
(1)画質調整部120から画質調整のなされた2D画像信号、
(2)3D視差信号生成部130から3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3、
(3)2D信号解析部140から輝度輪郭対応制御信号(LineJ)、色差対応制御信号(EdgeJ)、肌色対応制御信号(SkinF)、ノイズ対応制御信号(NoiseG)、
これ等(1)〜(3)の各信号を入力して、これ等の各信号を適用して最終的な視差画像信号、すなわち3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成して出力する。
【0083】
3D画像信号生成部150は、まず、
(2)3D視差信号生成部130から3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3と、
(3)2D信号解析部140から輝度輪郭対応制御信号(LineJ)、色差対応制御信号(EdgeJ)、肌色対応制御信号(SkinF)、ノイズ対応制御信号(NoiseG)、
これら(2),(3)の各信号を適用して、3D視差信号補正値(3DFout)を算出する。
【0084】
3D画像信号生成部150は、以下の式を適用して3D視差信号補正値(3DFout)を算出する。
3DFout={(GainLine)×(LineJ−Ky)×FK1+(GainEdge)×(EdgeJ−Kc)×FK2+(GainSkin)×(SkinF−Ks)×FK3}×(NoiseG×Kn)
【0085】
ただし、
GainLineは、輝度輪郭対応制御信号(LineJ)のゲイン補正量、
GainEdgeは、色差対応制御信号(EdgeJ)のゲイン補正量、
GainSkinは、肌色対応制御信号(SkinF)のゲイン補正量、
GainNoiseは、ノイズ対応制御信号(NoiseG)のゲイン補正量、
また、
Kyは、輝度ゲインオフセット、
Kcは、色差ゲインオフセット、
Ksは、特定色(本例では肌色)補正ゲイン、
Knは、ノイズ補正ゲイン
である。
これらのパラメータの値は予め規定された値を適用する。あるいはユーザやオペレータが自在に設定した値を適用してもよい。例えば出力画像を観察しながら調整する構成としてもよい。
このように、3D画像信号生成部150は、まず上記の式を適用して3D視差信号補正値(3DFout)を算出する。
【0086】
なお。この3D視差信号補正値(3DFout)は、3D視差信号生成部130から入力する左目用画像信号と右目用画像信号の各画素対応の補正用データとして生成する。すなわち、
(p)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
(q)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
これらの3D視差信号補正値(3DFout)を各々算出する。
【0087】
ただし、3D視差信号生成部130から入力する左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3の符号が合致していい場合や、3D視差信号補正値(3DFout)の符号がFK1、FK2、FK3と異なってしまった場合は、この3D視差信号補正値(3DFout)は有効ではないと判定し、その画素については、
3D視差信号補正値(3DFout)=0
とする。
【0088】
3D画像信号生成部150は、このように、上記の式を適用して3D視差信号補正値(3DFout)を算出し、さらに、この算出値を適用して最終的な3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成して出力する。
【0089】
具体的には、画質調整部120から画質調整のなされた2D画像信号に対して、
(p)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
(q)右目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
これ等の各値をそれぞれ加算して、最終的な3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成して出力する。
【0090】
すなわち、最終的な3次元画像信号を3DVoutとした場合、下記の式に従って3次元画像信号(3DVout)を算出して出力する。
3DVout=2D画像信号+3DFout
【0091】
なお、上記式において、3DFoutは、
左目用画像信号を生成する場合は、前述の(p)の値、すなわち、
(p)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
この値を各画素について適用する。
一方、右目用画像信号を生成する場合は、前述の(q)の値、すなわち、
(q)右目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
この値を各画素について適用する。
【0092】
以上の処理によって、最終的な3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号が生成され出力される。
【0093】
このように、本発明の画像処理装置では、3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の生成処理において、画像の各構成部が輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定し、これらの画像属性に応じて画素値を制御して視差画像を生成する構成としている。
【0094】
従って、従来の2D画像から3D画像としての視差画像を生成する一律に画像を左右に移動させる処理と異なり、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【0095】
なお、上述の処理例では、輝度(Y)、色差(Cb,Cr)の画像信号に対する処理例について説明したが、データ形式は、このYCbCrに限らずその他の色空間の信号に対しても同様の処理が可能である。
【0096】
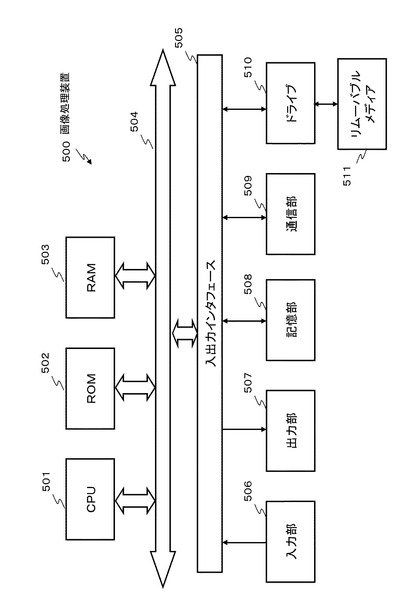
[4.画像処理装置のハードウェア構成例について]
最後に、図10を参照して本発明の画像処理装置の1つの具体的なハードウェア構成例について説明する。図10には、本発明の画像処理装置の一例としてパーソナルコンピュータ(PC)の例を示している。ただし、本発明の画像処理装置は2次元画像(2D画像)を入力して画像処理を実行して3次元画像(3D画像)を生成可能な装置であればよくPCの他、撮像装置、TV、プレーヤ等の様々な装置において実現される。なお、例えば撮像装置である場合は、図1に示す2次元画像信号入力部110の前段に撮像部が設定されることになる。
【0097】
CPU(Central Processing Unit)501は、ROM(Read Only Memory)502、または記憶部508に記憶されているプログラムに従って各種の処理を実行する。例えば、上述の各実施例において説明した画像処理を実行する。RAM(Random Access Memory)503には、CPU501が実行するプログラムやデータなどが適宜記憶される。これらのCPU501、ROM502、およびRAM503は、バス504により相互に接続されている。
【0098】
CPU501はバス504を介して入出力インタフェース505に接続され、入出力インタフェース505には、キーボード、マウス、マイクロホンなどよりなる入力部506、ディスプレイ、スピーカなどよりなる出力部507が接続されている。
また、入力部506からは、処理対象データ、例えば2次元画像(2D画像)が入力される。
【0099】
CPU501は、入力部506から入力される指示情報等に応じて各種の処理を実行し、処理結果を例えば出力部507に出力する。出力部507はディスプレイ、スピーカ等によって構成され、ディスプレイには前述した処理によって生成された3次元画像の表示がなされる。
【0100】
入出力インタフェース505に接続されている記憶部508は、例えばハードディスクからなり、CPU501が実行するプログラムや各種のデータを記憶する。通信部509は、インターネットやローカルエリアネットワークなどのネットワークを介して外部の装置と通信する。
【0101】
入出力インタフェース505に接続されているドライブ510は、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリなどのリムーバブルメディア511を駆動し、記録されているプログラムやデータなどを取得する。取得されたプログラムやデータは、必要に応じて記憶部508に転送され記憶される。
【0102】
以上、特定の実施例を参照しながら、本発明について詳解してきた。しかしながら、本発明の要旨を逸脱しない範囲で当業者が実施例の修正や代用を成し得ることは自明である。すなわち、例示という形態で本発明を開示してきたのであり、限定的に解釈されるべきではない。本発明の要旨を判断するためには、特許請求の範囲の欄を参酌すべきである。
【0103】
また、明細書中において説明した一連の処理はハードウェア、またはソフトウェア、あるいは両者の複合構成によって実行することが可能である。ソフトウェアによる処理を実行する場合は、処理シーケンスを記録したプログラムを、専用のハードウェアに組み込まれたコンピュータ内のメモリにインストールして実行させるか、あるいは、各種処理が実行可能な汎用コンピュータにプログラムをインストールして実行させることが可能である。例えば、プログラムは記録媒体に予め記録しておくことができる。記録媒体からコンピュータにインストールする他、LAN(Local Area Network)、インターネットといったネットワークを介してプログラムを受信し、内蔵するハードディスク等の記録媒体にインストールすることができる。
【0104】
なお、明細書に記載された各種の処理は、記載に従って時系列に実行されるのみならず、処理を実行する装置の処理能力あるいは必要に応じて並列的にあるいは個別に実行されてもよい。また、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【産業上の利用可能性】
【0105】
以上、説明したように、本発明の一実施例の構成によれば、2次元画像の変換により、違和感の少ない3次元画像信号が生成される。本発明の画像処理装置では2次元画像信号の解析処理により画像領域単位の画像特徴情報、例えば、輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定する。これらの特徴情報と、3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する。この結果、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【符号の説明】
【0106】
100 画像処理装置
110 2D画像信号入力部
120 画質調整部
121 輝度調整部
122 オフセット設定部
123 ガンマ補正部
130 3D視差信号生成部
140 2D信号解析部
141 輝度輪郭検出部
142 色差検出部
143 肌色検出部
144 ノイズ検出部
150 3D画像信号生成部
201 処理画像
210 1次元FIRフィルタ
221 左目用画像生成フィルタ
222 右目用画像生成フィルタ
251 1次元FIRフィルタ
281 FIRフィルタ
282 処理画像領域
283 探索領域
284 計算エリア
285 3×3画素領域
286 Eb1〜Eb9計算結果例
501 CPU
502 ROM
503 RAM
504 バス
505 入出力インタフェース
506 入力部
507 出力部
508 記憶部
509 通信部
510 ドライブ
511 リムーバブルメディア
【技術分野】
【0001】
本発明は、画像処理装置、および画像処理方法、並びにプログラムに関し、特に2次元(2D)画像の画像変換を実行して3次元(3D)画像表示に適用する視差画像を生成する画像処理装置、および画像処理方法、並びにプログラムに関する。
【背景技術】
【0002】
2次元(2D)画像を3次元(3D)画像表示用の視差画像、すなわち、左目で観察する左目用画像と、右目で観察する右目用画像に変換する装置および方法について従来から様々な提案がなされている。
【0003】
2次元画像に基づいて生成された視差画像は、左目で観察する左目用画像と右目で観察する右目用画像のペアによって構成される。左目用画像を観察者の左目のみで観察し、右目用画像を観察者の右目のみで観察することで、観察者は画像を立体画像として知覚することができる。
【0004】
このような画像の生成や表示処理に関して開示した従来技術には、例えば、特許文献1(特開平11−98351号公報)や、特許文献2(特開平8−30806号公報)がある。これらの文献は、2次元画像をベースとして左目用画像と右目用画像を生成するものであり、左目用画像と右目用画像を、2次元画像をベースとして所定量だけ水平方向にずらすことにより、立体感を感じられる画像を生成する構成を提案している。
【0005】
しかしこの画像ずらし処理を行うフィルタ処理は、例えば2D画像のすべての画像部分を一律にずらして視差を設定することになり、本来、視差を設定すべきでない部分にも視差を発生させてしまい、違和感のある3次元画像が生成されるという問題がある。これは視差をつけるべき部分と、視差をつけてはいけない部分を区別せず、例えばオブジェクトの輪郭ではない模様などのディテール部分などに本来視差をつけてはいけない部分にも視差を発生させてしまうことに起因する。結果的に、ディテール部分にも視差生成を行うことになり、ディテール部分に輪郭部分と同様な視差がつき、本来ありえない視差が発生してしまい不自然な3次元画像が生成されるという問題が発生していた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−98351号公報
【特許文献2】特開平8−30806号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、例えば上記の問題を解決するものであり、2次元(2D)画像に対する画像変換を実行して3次元(3D)画像表示に適用する視差画像を生成する際に、2次元画像の各領域の特性を解析し、解析結果に応じた視差画像の生成処理を行なうことで、より自然な3次元(3D)画像を生成する画像処理装置、および画像処理方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の第1の側面は、
2次元画像信号を入力する画像入力部と、
前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成部と、
前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析部と、
前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成部を有する画像処理装置にある。
【0009】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号の輝度信号の解析を実行して画像領域単位の輝度輪郭対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記輝度輪郭対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0010】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号の色差信号の解析を実行して画像領域単位の色差対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記色差対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0011】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号の特定色の解析を実行して画像領域単位の特定色対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記特定色対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0012】
さらに、本発明の画像処理装置の一実施態様において、前記特定色は肌色である。
【0013】
さらに、本発明の画像処理装置の一実施態様において、前記2次元画像信号解析部は、前記2次元画像信号のノイズ情報の解析を実行して画像領域単位のノイズ対応制御信号を生成する構成であり、前記3次元画像信号生成部は、前記ノイズ対応制御信号を適用して3次元画像視差信号補正値を算出する。
【0014】
さらに、本発明の画像処理装置の一実施態様において、前記3次元画像信号生成部は、以下の式を適用して3次元視差信号補正値(3DFout)算出する、
3DFout={(GainLine)×(LineJ−Ky)×FK1+(GainEdge)×(EdgeJ−Kc)×FK2+(GainSkin)×(SkinF−Ks)×FK3}×(NoiseG×Kn)
ただし、LineJは、輝度輪郭対応制御信号、
GainLineは、輝度輪郭対応制御信号(LineJ)のゲイン補正量、
EdgeJは、色差対応制御信号、
GainEdgeは、色差対応制御信号(EdgeJ)のゲイン補正量、
SkinFは、肌色対応制御信号、
GainSkinは、肌色対応制御信号(SkinF)のゲイン補正量、
NoiseGは、ノイズ対応制御信号、
GainNoiseは、ノイズ対応制御信号(NoiseG)のゲイン補正量、
Kyは、輝度ゲインオフセット、
Kcは、色差ゲインオフセット、
Ksは、特定色(本例では肌色)補正ゲイン、
Knは、ノイズ補正ゲイン
である。
【0015】
さらに、本発明の画像処理装置の一実施態様において、前記3次元画像信号生成部は、3次元画像を構成する視差画像としての3次元画像信号(3DVout)を、2次元画像信号に対して、前記3次元視差信号補正値(3DFout)を加算する下記式により算出する、
3DVout=2次元画像信号+3DFout。
【0016】
さらに、本発明の画像処理装置の一実施態様において、前記画像処理装置は、入力2次元画像信号に対する画質調整を実行する画質調整部を有し、前記3次元画像信号生成部は、画質調整のなされた2次元画像信号に対して前記3次元視差信号補正値(3DFout)を加算する処理を実行する。
【0017】
さらに、本発明の第2の側面は、
撮像部と、前記いずれかに記載の画像処理を実行する画像処理部とを有する撮像装置にある。
【0018】
さらに、本発明の第3の側面は、
画像処理装置において画像処理を実行する画像処理方法であり、
画像入力部が、2次元画像信号を入力する画像入力ステップと、
3次元画像視差信号生成部が、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成ステップと、
2次元画像信号解析部が、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析ステップと、
3次元画像信号生成部が、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成ステップを実行する画像処理方法にある。
【0019】
さらに、本発明の第4の側面は、
画像処理装置において画像処理を実行させるプログラムであり、
画像入力部に、2次元画像信号を入力させる画像入力ステップと、
3次元画像視差信号生成部に、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成させる3次元画像視差信号生成ステップと、
2次元画像信号解析部に、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成させる2次元画像信号解析ステップと、
3次元画像信号生成部に、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出させ、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成させる3次元画像信号生成ステップを実行させるプログラムにある。
【0020】
なお、本発明のプログラムは、例えば、様々なプログラム・コードを実行可能な汎用システムに対して、コンピュータ可読な形式で提供する記憶媒体、通信媒体によって提供可能なプログラムである。このようなプログラムをコンピュータ可読な形式で提供することにより、コンピュータ・システム上でプログラムに応じた処理が実現される。
【0021】
本発明のさらに他の目的、特徴や利点は、後述する本発明の実施例や添付する図面に基づくより詳細な説明によって明らかになるであろう。なお、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【発明の効果】
【0022】
本発明の一実施例構成によれば、2次元画像の変換により、違和感の少ない3次元画像信号が生成される。本発明の画像処理装置では2次元画像信号の解析処理により画像領域単位の画像特徴情報、例えば、輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定する。これらの特徴情報と、3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する。この結果、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【図面の簡単な説明】
【0023】
【図1】本発明の画像処理装置の一構成例について説明する図である。
【図2】本発明の画像処理装置の一構成例について説明する図である。
【図3】本発明の画像処理装置において実行するフィルタを適用した視差画像の生成処理について説明する図である。
【図4】本発明の画像処理装置において実行するフィルタを適用した視差画像の生成処理について説明する図である。
【図5】本発明の画像処理装置において実行する輪郭部判定処理について説明する図である。
【図6】本発明の画像処理装置において実行する輪郭部判定処理について説明する図である。
【図7】FIRフィルタを9Tapとして設定した場合の本発明の画像処理装置において実行する輪郭部判定処理について説明する図である。
【図8】本発明の画像処理装置において実行する色差検出部の色エッジ判定処理について説明する図である。
【図9】FIRフィルタを9Tapとして設定した場合の本発明の画像処理装置において実行する色差検出部の色エッジ判定処理について説明する図である。
【図10】本発明の一実施例に係る画像処理装置のハードウェア構成例について説明する図である。
【発明を実施するための形態】
【0024】
以下、図面を参照しながら本発明の画像処理装置、および画像処理方法、並びにプログラムの詳細について説明する。以下の項目に従って順次説明する。
1.本発明の画像処理装置の実行する処理の概要について
2.画像処理装置の構成例について
3.画像処理装置の詳細構成と処理の詳細について
4.画像処理装置のハードウェア構成例について
【0025】
[1.本発明の画像処理装置の実行する処理の概要について]
まず、本発明の画像処理装置の実行する処理の概要について説明する。本発明の画像処理装置は2次元画像(2D画像)を入力し、2次元画像に対する画像変換処理により、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成する処理を実行する。この視差画像の生成処理に際して、画像解析を行い、解析結果を利用して3D画像信号の生成処理を行う。
【0026】
例えば、まず、画像情報解析ルーチンを実行して処理対象となる画像コンテンツから画像の特徴情報や属性情報を取得する。さらに次の判定ルーチンにおいてコンテンツの特徴点情報及び属性情報に基づく処理判定処理を実行する。さらに、判定結果に基づいて最後の制御ルーチンを実行し、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成する。
【0027】
本発明の画像処理装置では、例えば2次元画像の画像変換により、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成する構成において、違和感のない3次元画像を連続して生成、出力することを可能とする。
【0028】
なお、本発明の画像処理装置は、2次元画像(2D画像)を入力して画像処理を実行可能な装置であればよく、例えばPC、撮像装置、TV、プレーヤ等の様々な装置において実現される。
【0029】
[2.画像処理装置の構成例について]
図1は、本発明の画像処理装置の一実施例を示す図である。画像処理装置100は、図1に示すように、2D画像信号入力部110、画質調整部120、3D視差信号生成部130、2D信号解析部140、3D画像信号生成部150を有する。
【0030】
2D画像信号入力部110は、処理対象とする2D画像信号を入力する。2D画像信号入力部110に入力された2D画像信号は、画質調整部120、3D視差信号生成部130、2D信号解析部140に入力される。
【0031】
画質調整部120、3D視差信号生成部130、2D信号解析部140では、それぞれ後段で説明する処理を実行し、処理結果を3D画像信号生成部150に出力する。
3D画像信号生成部150は、画質調整部120、3D視差信号生成部130、2D信号解析部140の処理結果を入力して、3次元画像(3D画像)表示に適用する左目用画像と右目用画像の2つの視差画像信号を生成して出力する。
【0032】
[3.画像処理装置の詳細構成と処理の詳細について]
図2に、画像処理装置100の詳細構成例を示す。
図2に示すように、画質調整部120は、輝度調整部121を有し、輝度調整部121は、さらに、オフセット設定部122、ガンマ補正部123を有する。
また、2D信号解析部140は、輝度輪郭検出部141、色差検出部142、肌色検出部143、ノイズ検出部144を有する。
【0033】
2D画像信号入力部110は、2Dビデオ信号を入力し、2D画像信号入力部110内のメモリに数ライン分の画像データを蓄積する。このメモリに蓄積された画像データが、順次、画質調整部120、3D視差信号生成部130、2D信号解析部140に提供される。
【0034】
画質調整部120は、3次元画像を表示する表示装置の性能に合わせて輝度調整を行う。この処理をオフセット設定部122、ガンマ補正部123において実行する。
オフセット設定部122は、入力された2Dビデオ信号に定量的な輝度のオフセットを付加する。入力される輝度信号をXとした場合、出力される輝度信号Yは、
Y=X+b
となる。bはオフセット分の輝度信号である。
ガンマ補正部123は、入力された2Dビデオ信号の輝度信号の大小に応じて異なるゲインを適用した輝度補正、すなわちガンマ補正処理を実行する。
【0035】
3D視差信号生成部130は、入力された2次元画像信号に対して水平方向のフィルタを適用して、3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成する。
【0036】
図3、図4を参照して、フィルタを適用した視差画像の生成処理について説明する。
図3に示す処理画像(2D画像)201が、処理対象とする2次元画像である。処理画像(2D画像)201に対して、あらかじめ係数K1〜K5を設定した1次元フィルタ210を適用した処理を実行する。
【0037】
3次元画像表示に適用する左目用画像を生成するフィルタと右目用画像を生成するフィルタは係数K1〜K5を反転させた設定とする。
図3の下段に示すような左目用画像生成フィルタ221と、右目用画像生成フィルタ222のような設定である。
この設定のフィルタを処理画像(2D画像)201に適用することで、3次元画像表示に適用する左目用画像と右目用画像を生成する。
【0038】
フィルタの適用処理例について図4を参照して説明する。図4に示す処理画像(2D)画像201に対して、図4に示す1次元FIRフィルタ251を適用する。
処理画像(2D)画像201は、図に示す中央のラインの画素値がX0〜X4の設定であるものとする。
1次元FIRフィルタ251はフィルタ係数:K1〜〜K5が設定されたフィルタである。
【0039】
このFIRフィルタ251の適用結果として算出される値をF1とすると、
F1==K1×X0+K2×X1+K3×X2+K4×X3+K5×X4
となる。
この算出処理において、得られた値:F1を、区間を複数に区切り、それぞれゲイン係数a、切片bの一次式で補正する。すなわち、
入力信号をF1、
出力信号をF1core、
とすると、ある区間(F1×1,F1×2)において、
F1×1≦F1≦F1×2
を満たしていた場合は、
F1cor=a×F1+b
となる。
ただし、bは、F1×1におけるF1の値である。
【0040】
3D視差信号生成部130は、係数の異なるFIRフィルタを複数有する。3D視差信号生成部130は、これら係数の異なるFIRフィルタを適用した結果を生成して後段の3D画像信号生成部150に出力する。例えば3種類のフィルタを持つ場合、上述のFIRフィルタ251の適用結果として算出される値、F1の他、異なる係数を持つFIRフィルタの適用結果、F2,F3が得られる。
【0041】
3D視差信号生成部130は、3種類のフィルタの適用結果としてF1、F2、F3を算出し、さらに、これらのF1〜F3を補正係数K1〜K3(上述のゲイン係数a、切片bの一次式での補正に対応)で補正した結果として視差画像画素値情報FK1、FK2、FK3を生成する。これ等の各値が後段の3D画像信号生成部150に出力される。3D画像信号生成部150は、これ等の情報を利用して視差画像としての左目用画像信号と右目用画像信号の構成画素の画素値を決定する。
【0042】
なお、3D視差信号生成部130は、視差画像画素値情報FK1、FK2、FK3の各値を視差画像としての左目用画像信号と右目用画像信号の構成画素各々に対応する値として生成して3D画像信号生成部150に出力する。
【0043】
2D信号解析部140は、図2に示すように、輝度輪郭検出部141、色差検出部142、肌色検出部143、ノイズ検出部144を有する。これらの各処理部の処理を統合して、3D視差信号の適応処理を行うための制御信号を生成する。
各処理部の処理について説明する。
【0044】
輝度輪郭検出部141
輝度輪郭検出部141は、処理対象とする2次元画像信号の輝度信号Yを解析して、各画素部分が画像内のオブジェクトの輪郭部分に相当するか、輪郭部以外の例えばディテール部なのかを判別する。
【0045】
具体的には、2D画像信号入力部110から入力された2Dビデオ信号に対して、3D視差信号生成部130で使用したFIRフィルタのタップ数の範囲で特徴点を収集し、対象画素が輪郭部に相当するか否かを判定する。
【0046】
この輪郭部判定処理について、図5、図6を参照して説明する。
FIRフィルタのタップ数が5タップの場合の処理例について説明する。
図5に示すようなタップ数=5のFIRフィルタ281を適用した処理例である。
処理画像領域282に対する処理を説明する。
【0047】
まず処理画像領域282内での輝度差分布を調べるために、各画素につき3×3画素の単位を探索領域283として、5×5画素の処理画像領域282の輝度差を計算する。
5×5画素の処理画像領域282を探索範囲とした場合には中央の3×3画素部分をセンターとした計算をそれぞれ行う。
【0048】
図6に示すような、3×3画素領域285内の輝度値Yを、センター画素の輝度値a、周囲の輝度値をa1〜a9としたとき、以下の中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値A1〜A9を算出する。
A1=|a−a1|
A2=|a−a2|
A3=|a−a3|
・・・
A9=|a−a9|
このように、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値A1〜A9を算出する。
【0049】
次に、A1、A2・・・A9を予め規定した閾値THaから引いた絶対値をすべて加算してSum(b)とする。すなわち、
Sum(b)=|THa−A1|+|THa−A2|+・・・+|THa−A9|
上記式に従ってSum(b)を算出する。
【0050】
A1、A2・・・A9は、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きいほど、より大きい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば大きい値となり、輝度値変化の少ない平坦領域であれば小さい値となる。また閾値THaをA1〜A9より大きい値として設定すると、
Sum(b)=|THa−A1|+|THa−A2|+・・・+|THa−A9|
このSum(b)は、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きい(A1〜A9が大きい)ほど、より小さい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば小さい値となり、輝度値変化の少ない平坦領域であれば大きい値となる。
【0051】
このSum(b)を図5に示す計算エリア284のb1、b2・・・b9の9箇所について全て算出する。これらの算出結果を、それぞれ、
Sum(b1)、
Sum(b2)、
・・・
Sum(b9)、
とする。
【0052】
さらに、それぞれのSum(b)に対して予め設定した補正閾値THbからSum(b)を引いた絶対値Ebを計算する。
Eb=|THb−Sum(b)|
上記算出式に従った計算を行って絶対値Ebを算出する。
【0053】
前述したように、Sum(b)は、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きい(A1〜A9が大きい)ほど、より小さい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば小さい値となり、輝度値変化の少ない平坦領域であれば大きい値となる。
従って、THbをSum(b)より大きな値として設定すると、
Eb=|THb−Sum(b)|
上記算出式に従った計算される絶対値Ebは、Sum(b)が大きければ小さい値となり、Sum(b)が小さい場合は大きな値となる。
【0054】
すなわち、Ebは、中央画素の輝度値aと周囲画素の輝度値a1〜a9との差分絶対値が大きい(A1〜A9が大きい)ほど、より大きい値となる。すなわち輝度値変化の大きい画像領域(エッジ領域)であれば大きい値となり、輝度値変化の少ない平坦領域であれば小さい値となる。
【0055】
この絶対値Ebの算出を、図5に示す計算エリア284のb1、b2・・・b9の9箇所について全て算出する。これらの算出結果を、
Eb1=|Thb−Sum(b1)|
Eb2=|Thb−Sum(b2)|
・・・
Eb9=|Thb−Sum(b9)|
としてそれぞれ求める。
【0056】
Ebが、あらかじめ設定した閾値ThEdgeよりも大きい場合、すなわち、
Eb>ThEdge
ならエッジ、すなわち輪郭部分であると判定する。
【0057】
この処理によって、例えば図6の下段に示すEb1〜Eb9判定結果286が得られる。
図6の下段に示すEb1〜Eb9判定結果286は、処理対象画素の周囲の画素について、
Eb>ThEdge
上記式を満足するか否かを区別して示している。
【0058】
処理対象画素の周囲に、
Eb>ThEdge
を満たす画素が隣接している場合、エッジ(輪郭部分)部分が隣接していると判断する。
周囲8画素中、上記判定式Eb>ThEdgeを満たす画素数をカウントする。
図6の下段に示すEb1〜Eb9判定結果286では、上記判定式Eb>ThEdgeを満たす画素数は3となる。
最終的には、この画素数に応じて処理対象画素がエッジ(輪郭)領域であるか否かを判定する。例えば、処理対象画素の周囲画素中、半数以上の画素がEb>ThEdgeを満たしている場合、エッジ(輪郭部分)部分が隣接していると判断する。
【0059】
なお、ここで説明した処理例は、5×5画素の探索範囲を設定した場合の処理例であるが、5×5画素より大きい場合には、上記判定式Eb>ThEdgeを満たす画素数のカウント領域を処理対象画素に直接隣接する8画素のみではなく、さらに周囲の画素についても考慮する設定としてもよい。
【0060】
例えば、図7にFIRフィルタを9Tapとして設定した場合の処理例を示す。図7に示すように、中心に示す処理対象画素に隣接する8画素について、上記と同様の処理によって、上記判定式Eb>ThEdgeを満たす画素数をカウントして、このカウント数F1とする。
さらに、この8画素の周囲の16画素について、上記判定式Eb>ThEdgeを満たす画素数をカウントして、このカウント数F2とする。
さらに、この16画素の周囲の24画素について、上記判定式Eb>ThEdgeを満たす画素数をカウントして、このカウント数F3とする。
【0061】
これらのカウント数F1〜F3を適用してエッジ領域であるか否かを判定する構成としてもよい。具体的には例えば、補正係数a,b,・・・を含めた以下に示す輪郭判定式、
LineJ=a×F1+b×F2+・・・
上記式に従って、輝度輪郭対応制御信号(LineJ)を計算する。
輝度輪郭対応制御信号(LineJ)が、予め設定された閾値より大きい場合には、輝度輪郭(エッジ)領域であると判定することができる。なお、この輝度輪郭対応制御信号(LineJ)は後段の3D画像信号生成部150で視差信号のゲインコントロールにも用いることができる。
【0062】
色差検出部142
次に色差検出部142について説明する。色差検出部142では処理対象とする2次元画像信号の色差信号(Cb,Cr)の分布を調べて、処理対象画素が色エッジ部に相当するかどうかを計算する。
この処理における探索範囲は輪郭検出の範囲と同様に、3D視差信号生成部130の視差画像生成処理で使用するFIRフィルタのタップ数の範囲とし、この範囲で、順次、色エッジの判定を行う。
【0063】
図8を参照して色差検出部142において実行する色エッジ判定処理について説明する。
例えば図8の探索範囲301に示すようにFIRフィルタのタップ数に合わせた5×5画素の領域を中心の処理対象画素の周囲に設定し、処理対象画素の周囲の画素について、色差信号:Cb、Crそれぞれに対して、前述の輝度信号Yベースの輪郭検出と同様のアルゴリズムで色差信号:Cb、Cr対応のエッジを検出する。
【0064】
基本的には、前述の輝度輪郭検出部141において実行した輝度信号Yベースの輪郭検出処理における輝度値Yを、色差信号Cr,Cbに置き換えた処理として実行する。
ただし、色の場合は垂直方向で集約するために、図8の領域分割例302に示すように、画素領域を、
処理対象画素の左側の垂直画素領域:c1、
処理対象画素を含む垂直画素領域:c2、
処理対象画素の右側の垂直画素領域:c3、
このように画素領域をc1〜c3として分けて処理を行う。
【0065】
例えば処理対象画素の左側の垂直画素領域:c1、この画素領域に対しては、
c1=b7+b4+b1となる。
b7,b4,b1は、図8の分割領域内部303に示すように、垂直画素領域:c1内の画素値を示している。なお、この場合の画素値は、色差CbまたはCrの値である。
【0066】
例えば、c1が、予め設定した閾値ThBlockよりも小さい否かをブロック判定処理として実行する。すなわち、
c1<ThBlock
なら、垂直画素領域c1はブロックであると判定する。
垂直画素領域c2,c3についても同様に、上記と同様のブロック判定を行う。
c1、c2、c3のいずれかがブロック判定において判定式を満たさない、すなわちブロックでないと判定された(fail)場合、処理対象画素の周囲に色エッジが含まれると判定する。
【0067】
色エッジが含まれると判定された場合、以下の式に従って、色差対応制御信号(EdgeJ)を算出する。
EdgeJ=a×1
上記式において、aは補正係数、1は処理対象画素からの距離(離間画素数)を示している。
【0068】
この処理例では、タップ数=5の5Tapのフィルタによる処理例を説明したが、前述の輝度Yベースの輪郭検出処理と同様、図7を参照して説明した9Tapの場合など、検証領域を大きく設定して色差対応制御信号(EdgeJ)の算出を実行してもよい。
【0069】
図9は、図7を参照して説明したと同様、9TtapのFIRフィルタを利用した場合の色差対応制御信号(EdgeJ)の算出処理例を説明する図である。
【0070】
この場合、図9に示すように垂直画素領域c1〜c7を設定し、
c1〜c7の各々が、予め設定した閾値よりも小さい否かをブロック判定処理として実行する。すなわち、例えば、
c1<ThBlock
なら、垂直画素領域c1はブロックであると判定する。
垂直画素領域c2〜c7についても同様に、上記と同様のブロック判定を行う。
c1〜c7のいずれかがブロック判定において判定式を満たさない、すなわちブロックでないと判定された(fail)場合、処理対象画素の周囲に色エッジが含まれると判定する。
【0071】
色エッジが含まれると判定された場合、以下の式に従って、色差対応制御信号(EdgeJ)を算出する。
EdgeJ=a×1+b×(1/2)+c×(1/3)
このように、(1/画素間距離)として計算する。
上記式において、a,b,cは補正係数、1,2,3は処理対象画素からの距離(離間画素数)を示している。
【0072】
なお、色差対応制御信号(EdgeJ)は色差Cb、Cr各々について計算し、絶対値比較を行い、大きいほうを選択して選択した色差対応制御信号(EdgeJ)を色エッジ判定処理に適用する。すなわち、予め設定した閾値と比較して色エッジの有無を判定する。なお、ここで得られる色差対応制御信号(EdgeJ)は、3D視差信号の制御に適用可能である。
【0073】
肌色検出部143
次に、肌色検出部143の処理について説明する。肌色検出部143は、2D画像信号入力部110から入力された2D画像信号に含まれる色差信号:Cb、Crの値が、予め規定したCb、Crのレンジに収まっているか否かを判定する。具体的には、
予め規定したCb、Crのレンジは、人の肌色の範囲に対応し、入力画像信号の各画素の色差信号:Cb、Crの値が、予め規定したCb、Crのレンジ内であれば肌色に相当する画素であると判定し、レンジ外であれば肌色に相当しない画素であると判定する。
【0074】
Cb、Crが特定色をみたすかどうかは、例えば予め規定したCb、Crのレンジを記録したテーブルを参照して判定する。
入力画像信号の各画素の色差信号:Cb、Crの値が、予め規定したCb、Crのレンジ内であれば肌色に相当する画素であると判定し、以下に示す肌色対応制御信号を出力する。
SkinF=0
値0は、その画素が肌色であることを示すフラグの値である。
【0075】
一方、入力画像信号の各画素の色差信号:Cb、Crの値が、予め規定したCb、Crのレンジ外であれば肌色に相当しない画素であると判定し、
SkinF=1
を出力する。値1は、その画素が肌色でないことを示すフラグの値である。
【0076】
肌色検出部143は、このように、肌色対応制御信号(SkinF)を生成して後段の3D画像信号生成部150に提供する。なお、肌色検出部143は、この肌色対応制御信号(SkinF)は、各画素に対応する信号として生成し出力する。
【0077】
ノイズ検出部144
次に、ノイズ検出部144の処理について説明する。ノイズ検出部144は、2D画像信号入力部110から入力された2Dビデオ信号に含まれるフレームノイズを検出する。検出処理は画素単位で実行され、画素単位のノイズ情報NoiseGを出力する。なお、フレームノイズを検出する手法としては従来から知られるノイズ検出手法が適用可能である。
【0078】
ノイズ検出部144は、各画素について、
予め規定した閾値以上のノイズが含まれる場合、
ノイズありを示すノイズ対応制御信号:NoiseG=1を画素対応のフラグとして出力し、
予め規定した閾値未満のノイズしか含まれない場合、
ノイズなしを示すノイズ対応制御信号:NoiseG=0を画素対応のフラグとして出力する。
【0079】
ノイズ検出部144は、このように、ノイズ対応制御信号(NoiseG)を生成して後段の3D画像信号生成部150に提供する。なお、ノイズ検出部144は、このノイズ対応制御信号(NoiseG)は、各画素に対応する信号として生成し出力する。
【0080】
3D画像信号生成部150
次に、3D画像信号生成部150の実行する処理について説明する。
3D画像信号生成部150は、
画質調整部120から画質調整のなされた2D画像信号、
3D視差信号生成部130から3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3、
これらの各情報を入力する。
【0081】
さらに、2D信号解析部140から以下の情報を入力する。
輝度輪郭検出部141から、輝度輪郭対応制御信号(LineJ)、
色差検出部142から、色差対応制御信号(EdgeJ)、
肌色検出部143から、肌色対応制御信号(SkinF)、
ノイズ検出部144から、ノイズ対応制御信号(NoiseG)、
これらの制御信号(LineJ、EdgeJ、SkinF、NoiseG)を入力する。
【0082】
3D画像信号生成部150は、このように、
(1)画質調整部120から画質調整のなされた2D画像信号、
(2)3D視差信号生成部130から3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3、
(3)2D信号解析部140から輝度輪郭対応制御信号(LineJ)、色差対応制御信号(EdgeJ)、肌色対応制御信号(SkinF)、ノイズ対応制御信号(NoiseG)、
これ等(1)〜(3)の各信号を入力して、これ等の各信号を適用して最終的な視差画像信号、すなわち3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成して出力する。
【0083】
3D画像信号生成部150は、まず、
(2)3D視差信号生成部130から3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3と、
(3)2D信号解析部140から輝度輪郭対応制御信号(LineJ)、色差対応制御信号(EdgeJ)、肌色対応制御信号(SkinF)、ノイズ対応制御信号(NoiseG)、
これら(2),(3)の各信号を適用して、3D視差信号補正値(3DFout)を算出する。
【0084】
3D画像信号生成部150は、以下の式を適用して3D視差信号補正値(3DFout)を算出する。
3DFout={(GainLine)×(LineJ−Ky)×FK1+(GainEdge)×(EdgeJ−Kc)×FK2+(GainSkin)×(SkinF−Ks)×FK3}×(NoiseG×Kn)
【0085】
ただし、
GainLineは、輝度輪郭対応制御信号(LineJ)のゲイン補正量、
GainEdgeは、色差対応制御信号(EdgeJ)のゲイン補正量、
GainSkinは、肌色対応制御信号(SkinF)のゲイン補正量、
GainNoiseは、ノイズ対応制御信号(NoiseG)のゲイン補正量、
また、
Kyは、輝度ゲインオフセット、
Kcは、色差ゲインオフセット、
Ksは、特定色(本例では肌色)補正ゲイン、
Knは、ノイズ補正ゲイン
である。
これらのパラメータの値は予め規定された値を適用する。あるいはユーザやオペレータが自在に設定した値を適用してもよい。例えば出力画像を観察しながら調整する構成としてもよい。
このように、3D画像信号生成部150は、まず上記の式を適用して3D視差信号補正値(3DFout)を算出する。
【0086】
なお。この3D視差信号補正値(3DFout)は、3D視差信号生成部130から入力する左目用画像信号と右目用画像信号の各画素対応の補正用データとして生成する。すなわち、
(p)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
(q)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
これらの3D視差信号補正値(3DFout)を各々算出する。
【0087】
ただし、3D視差信号生成部130から入力する左目用画像信号と右目用画像信号の各画素対応の視差画像画素値情報FK1、FK2、FK3の符号が合致していい場合や、3D視差信号補正値(3DFout)の符号がFK1、FK2、FK3と異なってしまった場合は、この3D視差信号補正値(3DFout)は有効ではないと判定し、その画素については、
3D視差信号補正値(3DFout)=0
とする。
【0088】
3D画像信号生成部150は、このように、上記の式を適用して3D視差信号補正値(3DFout)を算出し、さらに、この算出値を適用して最終的な3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成して出力する。
【0089】
具体的には、画質調整部120から画質調整のなされた2D画像信号に対して、
(p)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
(q)右目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
これ等の各値をそれぞれ加算して、最終的な3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号を生成して出力する。
【0090】
すなわち、最終的な3次元画像信号を3DVoutとした場合、下記の式に従って3次元画像信号(3DVout)を算出して出力する。
3DVout=2D画像信号+3DFout
【0091】
なお、上記式において、3DFoutは、
左目用画像信号を生成する場合は、前述の(p)の値、すなわち、
(p)左目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
この値を各画素について適用する。
一方、右目用画像信号を生成する場合は、前述の(q)の値、すなわち、
(q)右目用画像信号を構成する画素単位の3D視差信号補正値(3DFout)、
この値を各画素について適用する。
【0092】
以上の処理によって、最終的な3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号が生成され出力される。
【0093】
このように、本発明の画像処理装置では、3次元画像表示に適用する視差画像としての左目用画像信号と右目用画像信号の生成処理において、画像の各構成部が輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定し、これらの画像属性に応じて画素値を制御して視差画像を生成する構成としている。
【0094】
従って、従来の2D画像から3D画像としての視差画像を生成する一律に画像を左右に移動させる処理と異なり、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【0095】
なお、上述の処理例では、輝度(Y)、色差(Cb,Cr)の画像信号に対する処理例について説明したが、データ形式は、このYCbCrに限らずその他の色空間の信号に対しても同様の処理が可能である。
【0096】
[4.画像処理装置のハードウェア構成例について]
最後に、図10を参照して本発明の画像処理装置の1つの具体的なハードウェア構成例について説明する。図10には、本発明の画像処理装置の一例としてパーソナルコンピュータ(PC)の例を示している。ただし、本発明の画像処理装置は2次元画像(2D画像)を入力して画像処理を実行して3次元画像(3D画像)を生成可能な装置であればよくPCの他、撮像装置、TV、プレーヤ等の様々な装置において実現される。なお、例えば撮像装置である場合は、図1に示す2次元画像信号入力部110の前段に撮像部が設定されることになる。
【0097】
CPU(Central Processing Unit)501は、ROM(Read Only Memory)502、または記憶部508に記憶されているプログラムに従って各種の処理を実行する。例えば、上述の各実施例において説明した画像処理を実行する。RAM(Random Access Memory)503には、CPU501が実行するプログラムやデータなどが適宜記憶される。これらのCPU501、ROM502、およびRAM503は、バス504により相互に接続されている。
【0098】
CPU501はバス504を介して入出力インタフェース505に接続され、入出力インタフェース505には、キーボード、マウス、マイクロホンなどよりなる入力部506、ディスプレイ、スピーカなどよりなる出力部507が接続されている。
また、入力部506からは、処理対象データ、例えば2次元画像(2D画像)が入力される。
【0099】
CPU501は、入力部506から入力される指示情報等に応じて各種の処理を実行し、処理結果を例えば出力部507に出力する。出力部507はディスプレイ、スピーカ等によって構成され、ディスプレイには前述した処理によって生成された3次元画像の表示がなされる。
【0100】
入出力インタフェース505に接続されている記憶部508は、例えばハードディスクからなり、CPU501が実行するプログラムや各種のデータを記憶する。通信部509は、インターネットやローカルエリアネットワークなどのネットワークを介して外部の装置と通信する。
【0101】
入出力インタフェース505に接続されているドライブ510は、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリなどのリムーバブルメディア511を駆動し、記録されているプログラムやデータなどを取得する。取得されたプログラムやデータは、必要に応じて記憶部508に転送され記憶される。
【0102】
以上、特定の実施例を参照しながら、本発明について詳解してきた。しかしながら、本発明の要旨を逸脱しない範囲で当業者が実施例の修正や代用を成し得ることは自明である。すなわち、例示という形態で本発明を開示してきたのであり、限定的に解釈されるべきではない。本発明の要旨を判断するためには、特許請求の範囲の欄を参酌すべきである。
【0103】
また、明細書中において説明した一連の処理はハードウェア、またはソフトウェア、あるいは両者の複合構成によって実行することが可能である。ソフトウェアによる処理を実行する場合は、処理シーケンスを記録したプログラムを、専用のハードウェアに組み込まれたコンピュータ内のメモリにインストールして実行させるか、あるいは、各種処理が実行可能な汎用コンピュータにプログラムをインストールして実行させることが可能である。例えば、プログラムは記録媒体に予め記録しておくことができる。記録媒体からコンピュータにインストールする他、LAN(Local Area Network)、インターネットといったネットワークを介してプログラムを受信し、内蔵するハードディスク等の記録媒体にインストールすることができる。
【0104】
なお、明細書に記載された各種の処理は、記載に従って時系列に実行されるのみならず、処理を実行する装置の処理能力あるいは必要に応じて並列的にあるいは個別に実行されてもよい。また、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【産業上の利用可能性】
【0105】
以上、説明したように、本発明の一実施例の構成によれば、2次元画像の変換により、違和感の少ない3次元画像信号が生成される。本発明の画像処理装置では2次元画像信号の解析処理により画像領域単位の画像特徴情報、例えば、輝度輪郭領域に該当するか否か、色差エッジ領域に対応するか否か、肌色領域に対応するか否か、ノイズを多く含むか否か、これらの画像領域属性を判定する。これらの特徴情報と、3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する。この結果、輝度や色差に基づくエッジ情報や、肌色情報、ノイズ情報を考慮した視差画像が生成され、より自然な違和感の少ない3次元画像の生成、表示が実現される。
【符号の説明】
【0106】
100 画像処理装置
110 2D画像信号入力部
120 画質調整部
121 輝度調整部
122 オフセット設定部
123 ガンマ補正部
130 3D視差信号生成部
140 2D信号解析部
141 輝度輪郭検出部
142 色差検出部
143 肌色検出部
144 ノイズ検出部
150 3D画像信号生成部
201 処理画像
210 1次元FIRフィルタ
221 左目用画像生成フィルタ
222 右目用画像生成フィルタ
251 1次元FIRフィルタ
281 FIRフィルタ
282 処理画像領域
283 探索領域
284 計算エリア
285 3×3画素領域
286 Eb1〜Eb9計算結果例
501 CPU
502 ROM
503 RAM
504 バス
505 入出力インタフェース
506 入力部
507 出力部
508 記憶部
509 通信部
510 ドライブ
511 リムーバブルメディア
【特許請求の範囲】
【請求項1】
2次元画像信号を入力する画像入力部と、
前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成部と、
前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析部と、
前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成部を有する画像処理装置。
【請求項2】
前記2次元画像信号解析部は、
前記2次元画像信号の輝度信号の解析を実行して画像領域単位の輝度輪郭対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記輝度輪郭対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1に記載の画像処理装置。
【請求項3】
前記2次元画像信号解析部は、
前記2次元画像信号の色差信号の解析を実行して画像領域単位の色差対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記色差対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1または2に記載の画像処理装置。
【請求項4】
前記2次元画像信号解析部は、
前記2次元画像信号の特定色の解析を実行して画像領域単位の特定色対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記特定色対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1〜3いずれかに記載の画像処理装置。
【請求項5】
前記特定色は肌色である請求項4に記載の画像処理装置。
【請求項6】
前記2次元画像信号解析部は、
前記2次元画像信号のノイズ情報の解析を実行して画像領域単位のノイズ対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記ノイズ対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1〜5いずれかに記載の画像処理装置。
【請求項7】
前記3次元画像信号生成部は、以下の式を適用して3次元視差信号補正値(3DFout)算出する、
3DFout={(GainLine)×(LineJ−Ky)×FK1+(GainEdge)×(EdgeJ−Kc)×FK2+(GainSkin)×(SkinF−Ks)×FK3}×(NoiseG×Kn)
ただし、LineJは、輝度輪郭対応制御信号、
GainLineは、輝度輪郭対応制御信号(LineJ)のゲイン補正量、
EdgeJは、色差対応制御信号、
GainEdgeは、色差対応制御信号(EdgeJ)のゲイン補正量、
SkinFは、肌色対応制御信号、
GainSkinは、肌色対応制御信号(SkinF)のゲイン補正量、
NoiseGは、ノイズ対応制御信号、
GainNoiseは、ノイズ対応制御信号(NoiseG)のゲイン補正量、
Kyは、輝度ゲインオフセット、
Kcは、色差ゲインオフセット、
Ksは、特定色(本例では肌色)補正ゲイン、
Knは、ノイズ補正ゲイン
である請求項6に記載の画像処理措置。
【請求項8】
前記3次元画像信号生成部は、
3次元画像を構成する視差画像としての3次元画像信号(3DVout)を、
2次元画像信号に対して、前記3次元視差信号補正値(3DFout)を加算する下記式により算出する、
3DVout=2次元画像信号+3DFout
請求項7に記載の画像処理装置。
【請求項9】
前記画像処理装置は、
入力2次元画像信号に対する画質調整を実行する画質調整部を有し、
前記3次元画像信号生成部は、
画質調整のなされた2次元画像信号に対して前記3次元視差信号補正値(3DFout)を加算する処理を実行する請求項8に記載の画像処理装置。
【請求項10】
撮像部と、
前記請求項1〜9いずれかに記載の画像処理を実行する画像処理部と、
を有する撮像装置。
【請求項11】
画像処理装置において画像処理を実行する画像処理方法であり、
画像入力部が、2次元画像信号を入力する画像入力ステップと、
3次元画像視差信号生成部が、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成ステップと、
2次元画像信号解析部が、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析ステップと、
3次元画像信号生成部が、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成ステップを実行する画像処理方法。
【請求項12】
画像処理装置において画像処理を実行させるプログラムであり、
画像入力部に、2次元画像信号を入力させる画像入力ステップと、
3次元画像視差信号生成部に、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成させる3次元画像視差信号生成ステップと、
2次元画像信号解析部に、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成させる2次元画像信号解析ステップと、
3次元画像信号生成部に、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出させ、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成させる3次元画像信号生成ステップを実行させるプログラム。
【請求項1】
2次元画像信号を入力する画像入力部と、
前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成部と、
前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析部と、
前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成部を有する画像処理装置。
【請求項2】
前記2次元画像信号解析部は、
前記2次元画像信号の輝度信号の解析を実行して画像領域単位の輝度輪郭対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記輝度輪郭対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1に記載の画像処理装置。
【請求項3】
前記2次元画像信号解析部は、
前記2次元画像信号の色差信号の解析を実行して画像領域単位の色差対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記色差対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1または2に記載の画像処理装置。
【請求項4】
前記2次元画像信号解析部は、
前記2次元画像信号の特定色の解析を実行して画像領域単位の特定色対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記特定色対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1〜3いずれかに記載の画像処理装置。
【請求項5】
前記特定色は肌色である請求項4に記載の画像処理装置。
【請求項6】
前記2次元画像信号解析部は、
前記2次元画像信号のノイズ情報の解析を実行して画像領域単位のノイズ対応制御信号を生成する構成であり、
前記3次元画像信号生成部は、前記ノイズ対応制御信号を適用して3次元画像視差信号補正値を算出する請求項1〜5いずれかに記載の画像処理装置。
【請求項7】
前記3次元画像信号生成部は、以下の式を適用して3次元視差信号補正値(3DFout)算出する、
3DFout={(GainLine)×(LineJ−Ky)×FK1+(GainEdge)×(EdgeJ−Kc)×FK2+(GainSkin)×(SkinF−Ks)×FK3}×(NoiseG×Kn)
ただし、LineJは、輝度輪郭対応制御信号、
GainLineは、輝度輪郭対応制御信号(LineJ)のゲイン補正量、
EdgeJは、色差対応制御信号、
GainEdgeは、色差対応制御信号(EdgeJ)のゲイン補正量、
SkinFは、肌色対応制御信号、
GainSkinは、肌色対応制御信号(SkinF)のゲイン補正量、
NoiseGは、ノイズ対応制御信号、
GainNoiseは、ノイズ対応制御信号(NoiseG)のゲイン補正量、
Kyは、輝度ゲインオフセット、
Kcは、色差ゲインオフセット、
Ksは、特定色(本例では肌色)補正ゲイン、
Knは、ノイズ補正ゲイン
である請求項6に記載の画像処理措置。
【請求項8】
前記3次元画像信号生成部は、
3次元画像を構成する視差画像としての3次元画像信号(3DVout)を、
2次元画像信号に対して、前記3次元視差信号補正値(3DFout)を加算する下記式により算出する、
3DVout=2次元画像信号+3DFout
請求項7に記載の画像処理装置。
【請求項9】
前記画像処理装置は、
入力2次元画像信号に対する画質調整を実行する画質調整部を有し、
前記3次元画像信号生成部は、
画質調整のなされた2次元画像信号に対して前記3次元視差信号補正値(3DFout)を加算する処理を実行する請求項8に記載の画像処理装置。
【請求項10】
撮像部と、
前記請求項1〜9いずれかに記載の画像処理を実行する画像処理部と、
を有する撮像装置。
【請求項11】
画像処理装置において画像処理を実行する画像処理方法であり、
画像入力部が、2次元画像信号を入力する画像入力ステップと、
3次元画像視差信号生成部が、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成する3次元画像視差信号生成ステップと、
2次元画像信号解析部が、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成する2次元画像信号解析ステップと、
3次元画像信号生成部が、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出し、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成する3次元画像信号生成ステップを実行する画像処理方法。
【請求項12】
画像処理装置において画像処理を実行させるプログラムであり、
画像入力部に、2次元画像信号を入力させる画像入力ステップと、
3次元画像視差信号生成部に、前記2次元画像信号に基づいて、3次元画像を構成する視差画像の各画素対応の視差画像画素値情報を生成させる3次元画像視差信号生成ステップと、
2次元画像信号解析部に、前記2次元画像信号の解析を実行して画像領域単位の画像特徴情報を生成させる2次元画像信号解析ステップと、
3次元画像信号生成部に、前記2次元画像信号解析部の生成した特徴情報と、前記3次元画像視差信号生成部の生成した視差画像画素値情報により、3次元画像視差信号補正値を算出させ、算出した3次元画像視差信号補正値による前記2次元画像信号の補正処理により3次元画像を構成する視差画像を生成させる3次元画像信号生成ステップを実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【公開番号】特開2011−259211(P2011−259211A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−131954(P2010−131954)
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]